ąĀą░ą┤ąĖąŠąÜąŠčé >ąĪčģąĄą╝čŗ >ą”ąĖčäčĆąŠą▓čŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ >ąŚą░čēąĖčéą░ ąĖ ą║ąŠąĮčéčĆąŠą╗čī >
4-čģ ąŠčüąĄą▓ąŠą╣ Step/Dir ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čłą░ą│ąŠą▓čŗčģ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣
ąÆ čüčéą░čéčīąĄ ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ step/dir ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čāąĮąĖą┐ąŠą╗čÅčĆąĮčŗčģ čłą░ą│ąŠą▓čŗčģ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüą░ą╝ąŠą┤ąĄą╗čīąĮčŗą╝ čüą▓ąĄčĆą╗ąĖą╗čīąĮąŠ-čäčĆąĄąĘąĄčĆąĮčŗą╝ čüčéą░ąĮą║ąŠą╝.
ą¤čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ąĄčéčüčÅ, čćč鹊 čćąĖčéą░č鹥ą╗čī čāąČąĄ ąĘąĮą░ą║ąŠą╝ čü čüą░ą╝ąŠą┤ąĄą╗čīąĮčŗą╝ąĖ ą¦ą¤ąŻ cčéą░ąĮą║ą░ą╝ąĖ;
ąĖąĮą░č湥 čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖąĘčāčćąĖčéčī ą╝ą░č鹥čĆąĖą░ą╗čŗ, čāą║ą░ąĘą░ąĮąĮčŗąĄ ą▓ ą║ąŠąĮčåąĄ čüčéą░čéčīąĖ.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░ą╗čüčÅ ą▓ąĘą░ą╝ąĄąĮ ąĖą╝ąĄčÄčēąĄą│ąŠčüčÅ ą┐čĆąĖą╝ąĖčéąĖą▓ąĮąŠą│ąŠ 3-čģ ąŠčüąĄą▓ąŠą│ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░(ąĮą░ ATTiny2313).
ą×čüąĮąŠą▓ąĮčŗą╝ąĖ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ąĖ ą▒čŗą╗ąĖ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ ą╝ąĖą║čĆąŠčłą░ą│ą░ ąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ą║ąŠąĮčéčĆąŠą╗čī č鹊ą║ą░ ą▓ ąŠą▒ą╝ąŠčéą║ą░čģ čü čåąĄą╗čīčÄ
čüąĮąĖąČąĄąĮąĖčÅ čłčāą╝ą░ ąĖ ą┐ąŠą▓čŗčłąĄąĮąĖčÅ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ.

ąźą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░:
- 4 ąŠčüąĖ;
- ą┤ą╗čÅ čāąĮąĖą┐ąŠą╗čÅčĆąĮčŗčģ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣;
- ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ą║ąŠąĮčéčĆąŠą╗čī č鹊ą║ą░ ą▓ ąŠą▒ą╝ąŠčéą║ą░čģ (ą©ąśą£);
- ąŠą┐č鹊čĆą░ąĘą▓čÅąĘą║ą░ čü LPT ą┐ąŠčĆč鹊ą╝;
- čĆąĄąČąĖą╝ čāą┤ąĄčƹȹ░ąĮąĖčÅ čü ą┐ąŠąĮąĖąČąĄąĮąĖąĄą╝ č鹊ą║ą░ ą┤ąŠ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ;
- full step, half step, 4, 8,16 microstep ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ąŠčéą┤ąĄą╗čīąĮąŠ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ ąŠčüąĖ;
- ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čćą░čüč鹊čéą░ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ąĖą╝ą┐čāą╗čīčüąŠą▓ step: 12.5 ą║ąōčå (ą┐ąĄčĆąĖąŠą┤ - 80ą╝ą║čü);
- ą╝ąĖąĮąĖą╝ą░ą╗čīąĮą░čÅ ą┤ą╗ąĖąĮą░ step ąĖ dir ąĖą╝ą┐čāą╗čīčüą░: 5ą╝ą║čü;
- č鹊ą║ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣ - ą┤ąŠ 2ąÉ, ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ ąŠčüąĖ ( ą▒ąŠą╗čīčłąĄ 2ąÉ ąĮąĄ ą┐čĆąŠą▓ąĄčĆčÅą╗ąŠčüčī, čüčģąĄą╝ą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé);
- ą┐ąĖčéą░ąĮąĖąĄ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣ - ą┤ąŠ 30ąÆ, čü ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčīčÄ čāą▓ąĄą╗ąĖč湥ąĮąĖčÅ ( ą▒ąŠą╗čīčłąĄ 19ąÆ ąĮąĄ ą┐čĆąŠą▓ąĄčĆčÅą╗ąŠčüčī ).
ąÆ ąŠą▒čēąĄą╝ čåąĄą╗ąŠą╝, ą┐ąŠą╗čāčćąĖą╗čüčÅ ą┤ąŠčüčéą░č鹊čćąĮąŠ “ąĮą░ą▓ąŠčĆąŠč湥ąĮąĮčŗą╣” ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĮą░ ą┤ąĄčłčæą▓čŗčģ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮčæąĮąĮčŗčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░čģ.
ąØąĖ ąŠą┤ąĖąĮ ąĖąĘ ąĖąĘą▓ąĄčüčéąĮčŗčģ ą╝ąĮąĄ čüą░ą╝ąŠą┤ąĄą╗čīąĮčŗčģ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ čéą░ą║ąĖą╝ ąĮą░ą▒ąŠčĆąŠą╝ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣ ąĮąĄ ąŠą▒ą╗ą░ą┤ą░ąĄčé.
ąŻą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą╝ąŠą┤čāą╗čī ą▓čŗą┐ąŠą╗ąĮąĄąĮ ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ ATMega8535, čĆą░ą▒ąŠčéą░čÄčēąĄą╝ ąĮą░ čćą░čüč鹊č鹥 16ą£ąōčå.
ąŚą░ą┤ą░čćą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ - ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ą▓čģąŠą┤ąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ Step/Dir ąĖ ą▓čŗą┤ą░ą▓ą░čéčī čüąĖą│ąĮą░ą╗čŗ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ąĖ ąŠą┐ąŠčĆąĮčŗąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┤ą╗čÅ čüąĖą╗ąŠą▓ąŠą╣ čćą░čüčéąĖ čüčģąĄą╝čŗ.
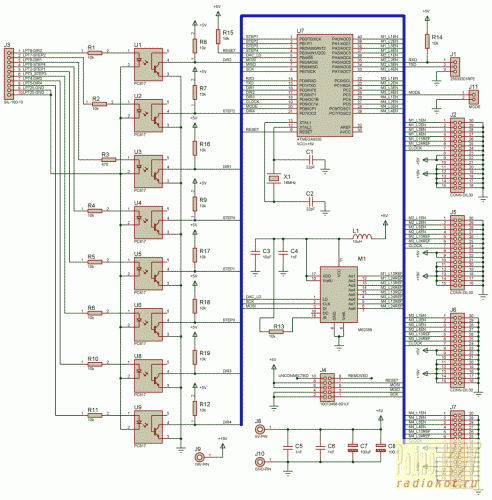
ą×ą┐ąŠčĆąĮčŗąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ č乊čĆą╝ąĖčĆčāčÄčéčüčÅ ą╝ąĖą║čĆąŠčüčģąĄą╝ąŠą╣ M62359 - čŹč鹊 8-ą▒ąĖčé 8-ą║ą░ąĮą░ą╗čīąĮčŗą╣ DAC čü SPI ąĖąĮč鹥čĆč乥ą╣čüąŠą╝.
ą×ą┐č鹊čĆą░ąĘą▓čÅąĘą║ą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ąĮą░ ąŠą┐čéčĆąŠąĮą░čģ PC817 ąĖ čÅą▓ą╗čÅąĄčéčüčÅ ąĮąĄąŠčéčŖąĄą╝ą╗ąĄą╝ąŠą╣ čćą░čüčéčīčÄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ąØą░ čŹč鹊čé ą╝ąŠą╝ąĄąĮč鹥 ąĮčāąČąĮąŠ ąŠčüčéą░ąĮąŠą▓ąĖčéčīčüčÅ ąŠčéą┤ąĄą╗čīąĮąŠ.

ąÜą░ą║ ą▓ąĖą┤ąĮąŠ ąĖąĘ čüčģąĄą╝čŗ, ą▓ ąŠčéą╗ąĖčćąĖąĄ ąŠčé ą░ąĮą░ą╗ąŠą│ąĖčćąĮčŗčģ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓, čüąĖą│ąĮą░ą╗čŗ Step ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą║ ą▓čŗą▓ąŠą┤ą░ą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ą║ąŠč鹊čĆčŗąĄ ą▓čŗąĘčŗą▓ą░čÄčé ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąÆą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ "ą║čĆčāčéąĖčéčüčÅ" ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠą╝ čåąĖą║ą╗ąĄ, ą┐čĆąŠą▓ąĄčĆčÅčÅ, ąĮąĄ ąĖąĘą╝ąĄąĮąĖą╗ąĖčüčī ą╗ąĖ ą╗ąŠą│ąĖč湥čüą║ąĖąĄ čāčĆąŠą▓ąĮąĖ ąĮą░ ą▓čģąŠą┤ą░čģ. ąŁč鹊 ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé čüčéą░ą▒ąĖą╗čīąĮčāčÄ ą┐čĆąĄą┤čüą║ą░ąĘčāąĄą╝čāčÄ čĆą░ą▒ąŠčéčā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ą×ą┤ąĖąĮ čåąĖą║ą╗ ( ą┐čĆąŠą▓ąĄčĆą║ą░ ą▓čģąŠą┤ąŠą▓, čĆąĄą░ą║čåąĖčÅ, ą▓čŗą▓ąŠą┤ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖčģ čüąĖą│ąĮą░ą╗ąŠą▓ ) ąĘą░ąĮąĖą╝ą░ąĄčé ą▓ č鹥ą║čāčēąĄą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ~26ą╝ą║čü.
ą¤čĆąĖ čŹč鹊ą╝ ąĘą░čÅą▓ą╗ąĄąĮąĮą░čÅ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮą░čÅ ą┤ą╗ąĖąĮą░ ąĖą╝ą┐čāą╗čīčüą░ Step - 5ą╝ą║čü.
ąÜą░ą║ąĖą╝ ąČąĄ ąŠą▒čĆą░ąĘąŠą╝ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĮąĄ ą┐čĆąŠą┐čāčüą║ą░ąĄčé ąĖą╝ą┐čāą╗čīčüčŗ?
ąŁč鹊, čéą░ą║ čüą║ą░ąĘą░čéčī, ą╝ąŠčæ ąĮąŠčā-čģą░čā :) ąĪąĄą║čĆąĄčé - ą▓ čüą▓ąŠą╣čüčéą▓ą░čģ ąŠą┐čéčĆąŠąĮąŠą▓.

ąÆ ą┤ą░čéą░čłąĖč鹥 ąĮą░ PC817 ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą│čĆą░čäąĖą║ąĖ Response time.
ą¤ąŠčüą╗ąĄ ąĖčüč湥ąĘąĮąŠą▓ąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ą▓čģąŠą┤ąĄ, ąŠą┐čéčĆąŠąĮčā čéčĆąĄą▒čāąĄčéčüčÅ ąŠą┐čĆąĄą┤ąĄą╗čæąĮąĮąŠąĄ ą▓čĆąĄą╝čÅ (ts + tf), čćč鹊ą▒čŗ ąĘą░ą║čĆčŗčéčīčüčÅ.
ąŁč鹊 ą▓čĆąĄą╝čÅ ąĘą░ą▓ąĖčüąĖčé ąŠčé č鹊ą║ą░, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąŠč鹥ą║ą░ąĄčé č湥čĆąĄąĘ č乊č鹊čéčĆą░ąĮąĘąĖčüč鹊čĆ.
ąØą░ ą┐čĆą░ą║čéąĖą║ąĄ čŹč鹊 ą▓čŗą│ą╗čÅą┤ąĖčé čéą░ą║:
ąÆčģąŠą┤ąĮčŗąĄ ąĖą╝ą┐čāą╗čīčüčŗ - 5ą╝ą║čü, ą┐ąĄčĆąĖąŠą┤ - 80ą╝ą║čü:

ąØą░ą│čĆčāąĘąŠčćąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ 10ą║ą×ą╝ ąĮą░ 5ąÆ - ąĖ ą▓čģąŠą┤ąĮąŠą╣ ąĖą╝ą┐čāą╗čīčü 5ą╝ą║čü ą┐čĆąĄą▓čĆą░čēą░ąĄčéčüčÅ ą▓ ~28ą╝ą║čü
(ąŠą▒ą╗ą░čüčéčī čāą▓ąĄčĆąĄąĮąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ ą▓čģąŠą┤ą░ AVR ą║ą░ą║ “0” - 0.8Vcc = 1V ):

ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĄčüčéčī, ą┐ąŠ ą║čĆą░ą╣ąĮąĄą╣ ą╝ąĄčĆąĄ, 28ą╝ą║čü ąĮą░ ąŠą┐čĆąŠčü ą▓čģąŠą┤ąŠą▓.
ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ąŠąĮ ą▓ ąŠą┤ąĖąĮąŠčćą║čā ą╝ąŠąČąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī čüčĆą░ąĘčā 4-ą╝čÅ ąŠčüčÅą╝ąĖ.

ą¦ąĄčéčŗčĆąĄ ą┐ą╗ą░čéčŗ čüąĖą╗ąŠą▓ąŠą╣ čćą░čüčéąĖ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĖą┤ąĄąĮčéąĖčćąĮčŗ ąĖ čüąŠą▒čĆą░ąĮčŗ ąĮą░ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░čģ UC3842
ąĖ čéčĆą░ąĮąĘąĖčüč鹊čĆą░čģ IRFZ44 ąĖą╗ąĖ IRF560 (čéčĆą░ąĮąĘąĖčüč鹊čĆčŗ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮčŗ ąĮą░ ąŠą▒čĆą░čéąĮąŠą╣ čüč鹊čĆąŠąĮąĄ ą┐ą╗ą░čéčŗ):

ąóąŠą║ ą▓ ą║ą░ąČą┤ąŠą╣ ąŠą▒ą╝ąŠčéą║ąĄ ą║ąŠąĮčéčĆąŠą╗ąĖčĆčāąĄčéčüčÅ ąŠčéą┤ąĄą╗čīąĮąŠą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝ąŠą╣ ąĖ čéčĆą░ąĮąĘąĖčüč鹊čĆąŠą╝:
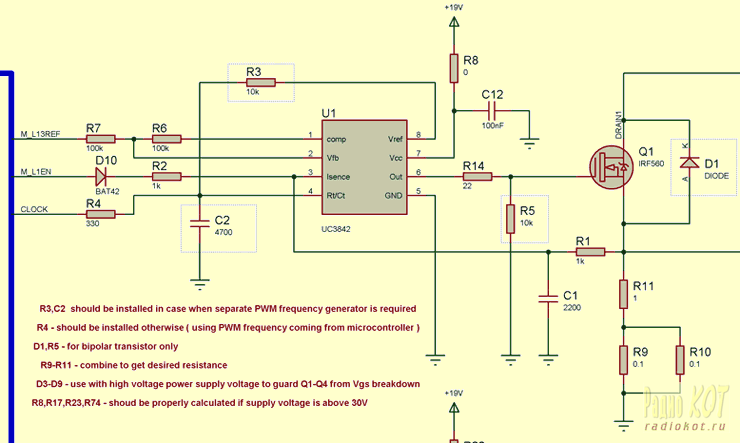
ą£ąĖą║čĆąŠčüčģąĄą╝ą░ UC3842 - čŹč鹊 ą©ąśą£ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┤ą╗čÅ ąĖą╝ą┐čāą╗čīčüąĮčŗčģ ąĖčüč鹊čćąĮąĖą║ąŠą▓ ą┐ąĖčéą░ąĮąĖčÅ.
ą×ąĮą░ čüąŠą┤ąĄčƹȹĖčé ą©ąśą£ ą│ąĄąĮąĄčĆą░č鹊čĆ, ą║ąŠą╝ą┐ą░čĆą░č鹊čĆ č鹊ą║ą░, RS čéčĆąĖą│ą│ąĄčĆ ąĖ ą┤čĆą░ą╣ą▓ąĄčĆ ą┐ąŠą╗ąĄą▓ąŠą│ąŠ čéčĆą░ąĮąĘąĖčüč鹊čĆą░. ąÆ ąŠą▒čēąĄą╝, ą┤ą╗čÅ čŹčéąĖčģ čåąĄą╗ąĄą╣ ą┐ąŠą┤čģąŠą┤ąĖčé ąĖą┤ąĄą░ą╗čīąĮąŠ :)
ą¤ąĄčĆą▓ąŠąĮą░čćą░ą╗čīąĮąŠ čÅ ą┐čŗčéą░ą╗čüčÅ čüąŠą▒čĆą░čéčī ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĮą░ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░čģ TL494.
ąØąŠ, ą║ą░ą║ ą▓čŗčÅčüąĮąĖą╗ąŠčüčī, čŹčéąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ąĮąĄ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮčŗ ą┤ą╗čÅ ą║ąŠąĮčéčĆąŠą╗čÅ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ č鹊ą║ą░ ą▓ č鹥č湥ąĮąĖąĖ ąŠą┤ąĮąŠą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░ ą©ąśą£.
ąśčģ ą▓čģąŠą┤ąĮčŗąĄ čüąĄąĮčüąŠčĆčŗ č鹊ą║ą░ ąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą▒čĆąĄąĘą░ąĮčŗ čäąĖą╗čīčéčĆą░ą╝ąĖ čü čćą░čüč鹊č鹊ą╣ 10-15ą║ąōčå.

UC3842, ąĮą░ą┐čĆąŠčéąĖą▓, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ ą┤ą╗čÅ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ č鹊ą║ą░ č湥čĆąĄąĘ ąŠą▒ą╝ąŠčéą║čā čéčĆą░ąĮčüč乊čĆą╝ą░č鹊čĆą░ ą▓ č鹥č湥ąĮąĖąĖ ąŠą┤ąĮąŠą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░.
ą×ąĮą░ ą▓čŗą║ą╗čÄčćą░ąĄčé čéčĆą░ąĮąĘąĖčüč鹊čĆ ą▓ ą╝ąŠą╝ąĄąĮčé ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą│ąŠ č鹊ą║ą░:

ą×ą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ, čüč乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ą”ąÉą¤ ąĮą░ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╝ ą╝ąŠą┤čāą╗ąĄ, ą┐ąŠčüčéčāą┐ą░ąĄčé ąĮą░ ą▓čģąŠą┤ Comp ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ.
ąÆ ąĮą░čćą░ą╗ąĄ ą┐ąĄčĆąĖąŠą┤ą░ ą©ąśą£ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąŠčéą║čĆčŗą▓ą░ąĄčé čéčĆą░ąĮąĘąĖčüč鹊čĆ. ąóąŠą║ ą▓ ąŠą▒ą╝ąŠčéą║ąĄ ąĮą░čćąĖąĮą░ąĄčé ą┐ą╗ą░ą▓ąĮąŠ ąĮą░čĆą░čüčéą░čéčī.
ąÜą░ą║ č鹊ą╗čīą║ąŠ č鹊ą║ ą┐čĆąĄą▓čŗčłą░ąĄčé ąĘą░ą┤ą░ąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĘą░ą║čĆčŗą▓ą░ąĄčé čéčĆą░ąĮąĘąĖčüč鹊čĆ.
UC3842 ąĖąĘą╝ąĄčĆčÅąĄčé č鹊ą║ ą▓ ąŠą▒ą╝ąŠčéą║ąĄ ą┐ąŠ ą┐ą░ą┤ąĄąĮąĖčÄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮą░ č鹊ą║ąŠąĖąĘą╝ąĄčĆąĖč鹥ą╗čīąĮąŠą╝ čĆąĄąĘąĖčüč鹊čĆąĄ.
ąÜčĆąŠą╝ąĄ čüčĆą░ą▓ąĮąĄąĮąĖčÅ čü ąŠą┐ąŠčĆąĮčŗą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝, ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ ą┐čĆąĄą┤čāčüą╝ąŠčéčĆąĄąĮą░ ąĘą░čēąĖčéą░ ą┐ąŠ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╝čā
č鹊ą║čā, ą║ąŠč鹊čĆą░čÅ ąŠčéą║ą╗čÄčćą░ąĄčé čéčĆą░ąĮąĘąĖčüč鹊čĆ ą┐čĆąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĖ ąĮą░ Isense ą▓čŗčłąĄ 1ąÆ.
ą¤ąŠčŹč鹊ą╝čā č鹊ą║ąŠąĖąĘą╝ąĄčĆąĖč鹥ą╗čīąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ ąĮčāąČąĮąŠ ą▓čŗą▒ąĖčĆą░čéčī čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊ą▒čŗ ą┐čĆąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╝ č鹊ą║ąĄ ą┐ą░ą┤ąĄąĮąĖąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮą░ ąĮčæą╝ čüąŠčüčéą░ą▓ą╗čÅą╗ąŠ čćčāčéčī ą╝ąĄąĮčīčłąĄ 1ąÆ.
ąóąŠčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ č鹊ą║ą░ ąĘą░ą┤ą░čæčéčüčÅ ą▓ ą┐čĆąŠčłąĖą▓ą║ąĄ.
ąØą░ ą┐ą╗ą░č鹥 ą┐čĆąĄą┤čāčüą╝ąŠčéčĆąĄąĮčŗ ą╝ąĄčüčéą░ ą┤ą╗čÅ čĆąĄąĘąĖčüč鹊čĆąŠą▓ R9-R11, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ąĮą░ą▒čĆą░čéčī čéčĆąĄą▒čāąĄą╝ąŠąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ.
ą£ąĖą║čĆąŠčüčģąĄą╝ą░ čüąŠą┤ąĄčƹȹĖčé ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ, čćą░čüč鹊čéą░ ą║ąŠč鹊čĆąŠą│ąŠ ąĘą░ą┤ą░čæčéčüčÅ čåąĄą┐ąŠčćą║ąŠą╣ R3C2:

ąÆąŠ ą▓čĆąĄą╝čÅ čĆą░ąĘčĆčÅą┤ą░ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆą░, ą▓čŗčģąŠą┤ąĮąŠą╣ čéčĆą░ąĮąĘąĖčüč鹊čĆ ąĘą░ą║čĆčŗą▓ą░ąĄčéčüčÅ (čŹč鹊 dead time).
ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▓čŗą▒ąŠčĆąŠą╝ ąĮąŠą╝ąĖąĮą░ą╗ąŠą▓ R3C2 ą╝ąŠąČąĮąŠ ąĘą░ą┤ą░ą▓ą░čéčī ąĖ čćą░čüč鹊čéčā, ąĖ dead time.
ąĢčüč鹥čüčéą▓ąĄąĮąĮąŠ, čŹčéąĖ 菹╗ąĄą╝ąĄąĮčéčŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ąĖ ą┤ą╗čÅ ą▓čüąĄčģ ąŠą▒ą╝ąŠč鹊ą║.
ą¦ą░čüč鹊čéčā ą©ąśą£ ą▓čŗą▒ąĖčĆą░čÄčé ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠ ą┤ą╗čÅ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ, čāčćąĖčéčŗą▓ą░čÅ ą┐ąŠą▓čŗčłąĄąĮąĖąĄ ąĮą░ą│čĆąĄą▓ą░ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ čü ą┐ąŠą▓čŗčłąĄąĮąĖąĄą╝ čćą░čüč鹊čéčŗ.
ą¦č鹊ą▒čŗ ąĮąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ, ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗ Clock, ą║ąŠč鹊čĆčŗą╣ č乊čĆą╝ąĖčĆčāąĄčé ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ.
ą¦ą░čüč鹊čéą░ ąĖ dead time ą┐čĆąĖ čŹč鹊ą╝ ąĘą░ą┤ą░čÄčéčüčÅ ą▓ ą┐čĆąŠčłąĖą▓ą║ąĄ. ąŁą╗ąĄą╝ąĄąĮčéčŗ R3C2 ąĮąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ - čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čĆąĄąĘąĖčüč鹊čĆ R4.
ą×ą┤ąĖąĮ ą▓čŗčģąŠą┤ ą”ąÉą¤ č乊čĆą╝ąĖčĆčāąĄčé ąŠą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┤ą╗čÅ ą┐ą░čĆčŗ ąŠą▒ą╝ąŠč鹊ą║ ( č鹊ą╗čīą║ąŠ ąŠą┤ąĮą░ ąĖąĘ ą║ąŠč鹊čĆčŗčģ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ą║ą╗čÄč湥ąĮą░ ą▓ ą┤ą░ąĮąĮčŗą╣ ą╝ąŠą╝ąĄąĮčé ).
ą¤ąŠčŹč鹊ą╝čā čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą╝ąŠą┤čāą╗čī ąŠčéą║ą╗čÄčćą░ąĄčé ( ą▓čŗčüąŠą║ąĖą╝ ą╗ąŠą│ąĖč湥čüą║ąĖą╝ čāčĆąŠą▓ąĮąĄą╝ ) ą┐ą░čĆąĮčāčÄ ąŠą▒ą╝ąŠčéą║čā čüąĖą│ąĮą░ą╗ąŠą╝ /M_L1EN.
ą”ąĄą┐ąŠčćą║ą░ R1C1 ą┐ąŠą┤ą▒ąĖčĆą░ąĄčéčüčÅ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊ą▒čŗ ą┐ąŠą│ą░čüąĖčéčī ą▓čüą┐ą╗ąĄčüą║ č鹊ą║ą░, ą▓ąŠąĘąĮąĖą║ą░čÄčēąĖą╣ ą┐čĆąĖ ąŠčéą║čĆčŗą▓ą░ąĮąĖąĖ čéčĆą░ąĮąĘąĖčüč鹊čĆą░:

ąöąĖąŠą┤ D1 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ. ą£ąĮąĄ čģą▓ą░čéąĖą╗ąŠ ą▓čüčéčĆąŠąĄąĮąĮčŗčģ ą▓ MOSFET.
ą¤čĆąĖ ą▓čŗą║ą╗čÄč湥ąĮąĖąĖ čéčĆą░ąĮąĘąĖčüč鹊čĆąŠą▓ ą▓ąŠąĘąĮąĖą║ą░čÄčé ą▓čŗą▒čĆąŠčüčŗ ą┐čĆąŠčéąĖą▓ąŠąŁąöąĪ, ą┐čĆąĖ čŹč鹊ą╝ ą▓čŗą▒čĆąŠčüčŗ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮą░ Drain-Source čéčĆą░ąĮąĘąĖčüč鹊čĆąŠą▓ ą╝ąŠą│čāčé ą┐čĆąĄą▓čŗčłą░čéčī ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ ą▓ 3 čĆą░ąĘą░.
ą¤ąĖčéą░ąĮąĖąĄ - 19ąÆ, ąöą©ąś-200:

ąÜą╗ą░čüčüąĖč湥čüą║ąĖ čŹčéąĖ ą▓čŗą▒čĆąŠčüčŗ ą│ą░čüčÅčé čłčāąĮčéąĖčĆčāčÄčēąĖą╝ąĖ ą┤ąĖąŠą┤ą░ą╝ąĖ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ąĖ ąĮą░ ąŠą▒ą╝ąŠčéą║ąĖ, ą╗ąĖą▒ąŠ ąŠčéą▓ąŠą┤čÅčé ą▓ ąĖčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ.
ą×ą┤ąĮą░ą║ąŠ ąĮčāąČąĮąŠ čāčćąĖčéčŗą▓ą░čéčī, čćč鹊 ąĘą░čłčāąĮčéąĖčĆąŠą▓ą░ąĮąĮą░čÅ ąŠą▒ą╝ąŠčéą║ą░ č鹊čĆą╝ąŠąĘąĖčé ą┤ą▓ąĖą│ą░č鹥ą╗čī ąĖ ąĮąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╗čāčćąĖčéčī ą▓čŗčüąŠą║čāčÄ čüą║ąŠčĆąŠčüčéčī ą▓čĆą░čēąĄąĮąĖčÅ.
ą¤ąŠčŹč鹊ą╝čā ą▓čŗą▒čĆąŠčüčŗ ąĮčāąČąĮąŠ ą│ą░čüąĖčéčī č鹊ą╗čīą║ąŠ ą┐čĆąĖ ą┐čĆąĄą▓čŗčłąĄąĮąĖąĖ ą┐čĆąĄą┤ąĄą╗čīąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ, čćč鹊 ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčéčüčÅ ą▓ą║ą╗čÄč湥ąĮąĖąĄą╝ čüčéą░ą▒ąĖą╗ąĖčéčĆąŠąĮą░ ąĮą░ą▓čüčéčĆąĄčćčā ą┤ąĖąŠą┤čā:

ą¢ąĄą╗ą░č鹥ą╗čīąĮąŠ ą┐čĆąŠčüč鹊 ą▓čŗą▒čĆą░čéčī čéčĆą░ąĮąĘąĖčüč鹊čĆčŗ čü ą┤ąŠčüčéą░č鹊čćąĮąŠ ą▒ąŠą╗čīčłąĖą╝ Vdss.
ą» ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ IRF540N (Vdss = 100ąÆ) ą┤ą╗čÅ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ąöą©ąś-200 ąĖ IRFZ44N (Vdss = 55ąÆ) ą┤ą╗čÅ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣ ąŠčé ą┐čĆąĖąĮč鹥čĆąŠą▓.
ąØą░ą┐ąŠą╝ąĮčÄ, čćč鹊 Vdss - čŹč鹊 ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą╝ąĄąČą┤čā Drain ąĖ Source, ą┐čĆąĖ ą║ąŠč鹊čĆąŠą╝ čéčĆą░ąĮąĘąĖčüč鹊čĆ čüą░ą╝ąŠą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠ ąŠčéą║čĆčŗą▓ą░ąĄčéčüčÅ.
ąØą░ ą┐čĆą░ą║čéąĖą║ąĄ čŹč鹊 ą▓čŗąĘčŗą▓ą░ąĄčé ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčāčÄ čĆą░ą▒ąŠčéčā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ąĮą░ą│čĆąĄą▓ čéčĆą░ąĮąĘąĖčüč鹊čĆąŠą▓ ą┐čĆąĖ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą╝ą░ą╗čŗčģ č鹊ą║ą░čģ č湥čĆąĄąĘ ąĮąĖčģ, ąĖą╗ąĖ ą▓čŗčģąŠą┤ čéčĆą░ąĮąĘąĖčüč鹊čĆąŠą▓ ąĖąĘ čüčéčĆąŠčÅ.
ąöą╗čÅ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣ ą┤ąŠ 3ąÉ, ą╝ąŠčüč乥čéčŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čģąŠą╗ąŠą┤ąĮčŗą╝ąĖ; čĆą░ą┤ąĖą░č鹊čĆčŗ ąĮą░ ąĮąĖčģ ąĮąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĘą░ą┐ąĖčéą░ąĮ ąŠčé ą▒ą╗ąŠą║ą░ ą┐ąĖčéą░ąĮąĖčÅ ąŠčé ąĮąŠčāčéą▒čāą║ą░ ąĮą░ 19ąÆ 3ąÉ:

5ąÆ ą┐ąŠą╗čāč湥ąĮčŗ čü ą┐ąŠą╝ąŠčēčīčÄ ą│ąŠč鹊ą▓ąŠą│ąŠ ą╝ąŠą┤čāą╗čÅ DC-DC ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čÅ ąĮą░ LM2596, ą┤ąŠčüčéčāą┐ąĮąŠą│ąŠ ąĮą░ ebay:

ąÆ čüčéą░ą▒ąĖą╗čīąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ č鹊ą║ ą▓ ąŠą▒ą╝ąŠčéą║ąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą░ą║čéąĖą▓ąĮčŗą╝ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄą╝ ąŠą▒ą╝ąŠčéą║ąĖ ąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ ą┐ąĖčéą░ąĮąĖčÅ.
ąØąŠ ą▓ ą╝ąŠą╝ąĄąĮčé ą▓ą║ą╗čÄč湥ąĮąĖčÅ č鹊ą║ ą▓ ąŠą▒ą╝ąŠčéą║ąĄ ąĘą░ą▓ąĖčüąĖčé ąĖ ąŠčé ą░ą║čéąĖą▓ąĮąŠą│ąŠ, ąĖ ąŠčé čĆąĄą░ą║čéąĖą▓ąĮąŠą│ąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ.
ą¤ąŠčŹč鹊ą╝čā ą▓ą╝ąĄčüč鹊 ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮčŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓ č鹊ą║ą░ ą╝čŗ čāą▓ąĖą┤ąĖą╝ čüą╗ąĄą┤čāčÄčēčāčÄ ą║ą░čĆčéąĖąĮčā:
ą¦ąĄą╝ ą▒ąŠą╗čīčłąĄ ąĖąĮą┤čāą║čéąĖą▓ąĮąŠčüčéčī ąŠą▒ą╝ąŠčéą║ąĖ, č鹥ą╝ ą┤ąŠą╗čīčłąĄ ą▒čāą┤čāčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī ąĮą░čĆą░čüčéą░ąĮąĖčÅ ąĖ čüą┐ą░ą┤čŗ č鹊ą║ą░.
ą¤čĆąĖ ą┐ąŠą▓čŗčłąĄąĮąĖąĖ čüą║ąŠčĆąŠčüčéąĖ ą▓čĆą░čēąĄąĮąĖčÅ, č鹊ą║ ąĮąĄ ą▒čāą┤ąĄčé čāčüą┐ąĄą▓ą░čéčī ąĮą░čĆą░čüčéą░čéčī ą┤ąŠ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ, ąĖ ą╝ąŠą╝ąĄąĮčé ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ąĮą░čćąĮčæčé ą┐ą░ą┤ą░čéčī:

ą¦č鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą▒čŗčüčéčĆąŠąĄ ąĮą░čĆą░čüčéą░ąĮąĖąĄ č鹊ą║ą░, ąĮčāąČąĮąŠ čāą▓ąĄą╗ąĖčćąĖčéčī ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ.
ąØąŠ ą▓ čüčéą░ą▒ąĖą╗čīąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ č鹊ą║ ą▓ ąŠą▒ą╝ąŠčéą║ąĄ ąŠą│čĆą░ąĮąĖč湥ąĮ č鹊ą╗čīą║ąŠ ą░ą║čéąĖą▓ąĮčŗą╝ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄą╝ ąŠą▒ą╝ąŠčéą║ąĖ.
ą¤ąŠčŹč鹊ą╝čā ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄ č鹊ą║ą░ ą┐čĆąĖ ą┐ąŠą▓čŗčłąĄąĮąĖąĖ ą┐ąĖčéą░čÄčēąĄą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čÅą▓ą╗čÅąĄčéčüčÅ ąŠą▒čÅąĘą░č鹥ą╗čīąĮčŗą╝.
ąĪą╗ąĄą┤čāąĄčé čāą┐ąŠą╝čÅąĮčāčéčī ąĄčēčæ ąŠą┤ąĖąĮ čüą┐ąŠčüąŠą▒ ą┐ąŠą▓čŗčłąĄąĮąĖčÅ ąŠą▒ąŠčĆąŠč鹊ą▓.
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ą┐ąŠą▓čŗčłą░čÄčé, ą░ čüą░ą╝ ą┤ą▓ąĖą│ą░č鹥ą╗čī ą▓ą║ą╗čÄčćą░čÄčé č湥čĆąĄąĘ ą╝ąŠčēąĮąŠąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ.
ąŁčéąĖą╝ ą╝čŗ čāą╝ąĄąĮčīčłą░ąĄą╝ ą┤ąŠą╗čÄ čĆąĄą░ą║čéąĖą▓ąĮąŠą│ąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ ą▓ čåąĄą┐ąĖ ąŠą▒ą╝ąŠčéą║ąĖ.
ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ čŹčäč乥ą║čéąĖą▓ąĮąŠ čĆąĄčłą░čÄčéčüčÅ čüčĆą░ąĘčā ą┤ą▓ąĄ ąĘą░ą┤ą░čćąĖ: ą┐ąŠą▓čŗčłąĄąĮąĖąĄ ąŠą▒ąŠčĆąŠč鹊ą▓ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ąĖ ąŠą▒ąŠą│čĆąĄą▓ ą╝ą░čüč鹥čĆčüą║ąŠą╣ :)
ąĀąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▓ ą┐čĆąŠčłąĖą▓ą║ąĄ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ ąŠčüąĖ.
Full Step, Full phase
(ą┐ąŠą╗ąĮčŗą╣ čłą░ą│, ąŠą┤ąĮą░ ąŠą▒ą╝ąŠčéą║ą░)


ąÜą╗ą░čüčüąĖč湥čüą║ąĖą╣ čĆąĄąČąĖą╝, ą▓ ą║ąŠč鹊čĆąŠą╝ ą▓ ą║ą░ąČą┤čŗą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ ą▓ą║ą╗čÄč湥ąĮą░ ąŠą┤ąĮą░ ąŠą▒ą╝ąŠčéą║ą░.
Full Step, Half phase
(ą┐ąŠą╗ąĮčŗą╣ čłą░ą│, ą┤ą▓ąĄ ąŠą▒ą╝ąŠčéą║ąĖ)

ąĀąĄąČąĖą╝, ą▓ ą║ąŠč鹊čĆąŠą╝ ą▓ ą║ą░ąČą┤čŗą╣ ą╝ąŠą╝ąĄąĮčé ą▓ą║ą╗čÄč湥ąĮčŗ 2 čüąŠčüąĄą┤ąĮąĖąĄ ąŠą▒ą╝ąŠčéą║ąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ.
ąóą░ą║ąĖą╝ ą▓ą║ą╗čÄč湥ąĮąĖąĄą╝ ą╝ąŠąČąĮąŠ ą┤ąŠą▒ąĖčéčīčüčÅ ą┐ąŠą▓čŗčłąĄąĮąĖčÅ ą╝ąŠą╝ąĄąĮčéą░ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ (ą╗ąĄą│ą║ąŠ čĆąĄą░ą╗ąĖąĘčāąĄą╝, ąĮąŠ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ č鹥ą║čāčēąĄą╣ ą┐čĆąŠčłąĖą▓ą║ąĄ).
Half step

ąÜąŠą╝ą▒ąĖąĮą░čåąĖčÅ ą┐čĆąĄą┤čŗą┤čāčēąĖčģ čĆąĄąČąĖą╝ąŠą▓. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čłą░ą│ąŠą▓ čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ ą▓ą┤ą▓ąŠąĄ. ąÜąŠą│ą┤ą░ ą▓ą║ą╗čÄč湥ąĮčŗ ą┤ą▓ąĄ ąŠą▒ą╝ąŠčéą║ąĖ, č鹊ą║ ą▓ ą║ą░ąČą┤ąŠą╣ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0.707 * Imax.
Microstep 4, 8, 16
ąĢčüą╗ąĖ ą┐čĆąĄą┤čüčéą░ą▓ąĖčéčī, ą║ą░ą║ ą▓čĆą░čēą░ąĄčéčüčÅ ą┤ą▓ąĖą│ą░č鹥ą╗čī ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąŠą╗ąĮąŠą│ąŠ čłą░ą│ą░ - ą╝ąŠąČąĮąŠ ąĘą░ą╝ąĄčéąĖčéčī, čćč鹊 ąŠąĮ ą┤ą▓ąĖą│ą░ąĄčéčüčÅ čĆčŗą▓ą║ą░ą╝ąĖ:
čüąĮą░čćą░ą╗ą░ čĆą░ąĘą│ąŠąĮčÅąĄčéčüčÅ, ą┐čĆąĖčéčÅą│ąĖą▓ą░ąĄą╝čŗą╣ ąŠč湥čĆąĄą┤ąĮąŠą╣ ąŠą▒ą╝ąŠčéą║ąŠą╣, ą┐ąŠč鹊ą╝ ąĘą░č鹊čĆą╝ą░ąČąĖą▓ą░ąĄčéčüčÅ, ą┤ąŠčüčéąĖą│ąĮčāą▓ ą║ąŠąĮąĄčćąĮąŠą│ąŠ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ.
ąŁč鹊 ą▓čŗąĘčŗą▓ą░ąĄčé ą▓ąĖą▒čĆą░čåąĖąĖ ą▓ą░ą╗ą░ ąĖ ą▓čüąĄą│ąŠ čüčéą░ąĮą║ą░ ą▓ čåąĄą╗ąŠą╝.
ąóą░ą║ čĆą░ą▒ąŠčéą░ąĄčé čüčéą░ąĮąŠą║, ą┐čĆąĖ čüąŠąĘą┤ą░ąĮąĖąĖ ą║ąŠč鹊čĆąŠą│ąŠ ą▓ąŠą┐čĆąŠčü čüąĮąĖąČąĄąĮąĖčÅ čłčāą╝ą░ ąĮąĄ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ą╗čüčÅ:
ąŚą┤ąĄčüčī ą▓čüčæ ą┐ą╗ąŠčģąŠ - ą╝ąŠčēąĮčŗąĄ ą┤ą▓ąĖą│ą░č鹥ą╗ąĖ ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąŠą╗ąĮąŠą│ąŠ čłą░ą│ą░, ąŠą│čĆąŠą╝ąĮčŗą╣ čĆąĄąĘąŠąĮąĖčĆčāčÄčēąĖą╣ ą║ąŠčĆą┐čāčü ąĖąĘ ąöąĪą¤…
ąĪąŠą▓čüąĄą╝ ą║ą░ą║ ą▓ ą╝ąŠčæą╝ ą┐ąĄčĆą▓ąŠą╝ čüčéą░ąĮą║ąĄ, ą║ąŠč鹊čĆčŗą╣ ąĖ ą┐čĆąĖčłą╗ąŠčüčī čĆą░ąĘąŠą▒čĆą░čéčī ąĖąĘ-ąĘą░ čłčāą╝ąĮąŠčüčéąĖ :)
ąÆ ąČąĖą╗ąŠą╝ ą┐ąŠą╝ąĄčēąĄąĮąĖąĖ ą▓ąŠą┐čĆąŠčü čüąĮąĖąČąĄąĮąĖčÅ čłčāą╝ą░ - čŹč鹊 ąĮąĄ ą┐čĆąĖčģąŠčéčī, čŹč鹊 - ą▓ąŠą┐čĆąŠčü, ą▒čāą┤ąĄčé ą╗ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüčéą░ąĮąŠą║ ą▓ąŠąŠą▒čēąĄ.
ą¦č鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą┐ą╗ą░ą▓ąĮąŠąĄ ą▓čĆą░čēąĄąĮąĖąĄ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┐ąĖčéą░čéčī ą┤ą▓ąĖą│ą░č鹥ą╗čī čüąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮčŗą╝ č鹊ą║ąŠą╝.
ąöą╗čÅ čŹč鹊ą│ąŠ ą▓ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ čłą░ą│ąŠą▓čŗčģ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣ ą╝ąŠą╝ąĄąĮčé ą┐ąĄčĆąĄčģąŠą┤ą░ ąŠčé ąŠą┤ąĮąŠą╣ ąŠą▒ą╝ąŠčéą║ąĖ ą║ ą┤čĆčāą│ąŠą╣ ą┤ąĄą╗čÅčé ąĮą░ 4-16 ą╝ąĖą║čĆąŠčłą░ą│ąŠą▓.
ąØą░ ą║ą░ąČą┤ąŠą╝ ą╝ąĖą║čĆąŠčłą░ą│ąĄ č鹊ą║ ą▓ ą┐ąĄčĆą▓ąŠą╣ ąŠą▒ą╝ąŠčéą║ąĄ čāą╝ąĄąĮčīčłą░ąĄčéčüčÅ, ą░ ą▓ąŠ ą▓č鹊čĆąŠą╣ - čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ, ą┐ąŠ čüąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮąŠą╝čā ąĘą░ą║ąŠąĮčā:

ą¤čĆąĖ čŹč鹊ą╝ čćą░čüč鹊čéą░ ąĖą╝ą┐čāą╗čīčüąŠą▓ Step ą▓ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čāą▓ąĄą╗ąĖč湥ąĮą░ ą▓ 4-16 čĆą░ąĘ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ.
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą╝ąĖą║čĆąŠčłą░ą│ą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čüąĮąĖąĘąĖčéčī čłčāą╝ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ąĖ ą┐ąŠą╗čāčćąĖčéčī ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąĖą╣ ą╝ąŠą╝ąĄąĮčé ąĮą░ ą▒ąŠą╗čīčłąĖčģ čüą║ąŠčĆąŠčüčéčÅčģ.
ąĪčéą░ąĮąŠą║ ąĮą░čćąĖąĮą░ąĄčé “ąĘą▓čāčćą░čéčī ą┐čĆąŠč乥čüčüąĖąŠąĮą░ą╗čīąĮąŠ”:
ą» ą╗ąĖčćąĮąŠ ąĮąĄ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čÄ ą╝ąĖą║čĆąŠčłą░ą│ ą║ą░ą║ čüą┐ąŠčüąŠą▒ ą┐ąŠą▓čŗčłąĄąĮąĖčÅ č鹊čćąĮąŠčüčéąĖ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 ą║ąŠąĮčüčéčĆčāą║čåąĖčÅ čĆąŠč鹊čĆą░ ąĖ čüčéą░č鹊čĆą░ ąĮąĄ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé čĆą░ą▓ąĮąŠą╝ąĄčĆąĮąŠą│ąŠ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąĖą║čĆąŠčłą░ą│ąŠą▓.
ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ą┐čĆąĖ ąĮąĄą▒ąŠą╗čīčłąŠą╝ čāčüąĖą╗ąĖąĖ, ąĖą╗ąĖ ą┐čĆąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĖ ą▓ čĆąĄąČąĖą╝ čāą┤ąĄčƹȹ░ąĮąĖčÅ, ą▓ą░ą╗ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ą╝ąŠąČąĄčé “ą▓čŗą┐ą░ą┤ą░čéčī” ą▓ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠą╗ąĮąŠą│ąŠ čłą░ą│ą░.

ą¤čĆąĖ ąŠčéčüčāčéčüčéą▓ąĖąĖ ąĖą╝ą┐čāą╗čīčüąŠą▓ Step ą▓ č鹥č湥ąĮąĖąĖ ~2 čüąĄą║čāąĮą┤, ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ąŠąĮąĖąČą░ąĄčé č鹊ą║ ą▓ ąŠą▒ą╝ąŠčéą║ą░čģ ą┤ąŠ ąĘąĮą░č湥ąĮąĖą╣, čāą║ą░ąĘą░ąĮąĮčŗčģ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ ąŠčüąĖ ą▓ ą┐čĆąŠčłąĖą▓ą║ąĄ.
ą¤ąŠą┐čāą╗čÅčĆąĮąŠčüčéčī čüą░ą╝ąŠą┤ąĄą╗čīąĮčŗčģ 3D ą┐čĆąĖąĮč鹥čĆąŠą▓ ą▓čŗąĘą▓ą░ą╗ą░ ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĄ ąĮą░ ebay ą│ąŠč鹊ą▓čŗčģ ą╝ąŠą┤čāą╗ąĄą╣ ąĮą░ čćąĖą┐ą░čģ A4983, ą║ąŠąĮą║čāčĆąĖčĆąŠą▓ą░čéčī čü ą║ąŠč鹊čĆčŗą╝ąĖ “čĆą░čüčüčŗą┐čāčģąŠą╣” ą┤ąŠčüčéą░č鹊čćąĮąŠ čüą╗ąŠąČąĮąŠ.
ąĪ ą┤čĆčāą│ąŠą╣ čüč鹊čĆąŠąĮčŗ, ą╝ąĮąĄ ą▒čŗą╗ąŠ čüą┐ąŠą║ąŠą╣ąĮąĄąĄ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčī čüąŠ čüčģąĄą╝ąŠą╣, ą│ą┤ąĄ ą▓ čģčāą┤čłąĄą╝ čüą╗čāčćą░ąĄ ą┐čĆąĖą┤čæčéčüčÅ ąĘą░ą╝ąĄąĮąĖčéčī ą║ą╗čÄčćąĖ, č湥ą╝ čü ą╝ąĖą║čĆąŠčüčģąĄą╝ąŠą╣ 3x3ą╝ą╝, ą║ąŠč鹊čĆą░čÅ ą▓ąĘąŠčĆą▓čæčéčüčÅ ą┐čĆąĖ ą╗čÄą▒ąŠą╣ ąŠčłąĖą▒ą║ąĄ.

ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ą▓ ą▒čāą┤čāčēąĄą╝ ą┐ą╗ą░ąĮąĖčĆčāąĄčéčüčÅ čĆą░čüčłąĖčĆąĖčéčī ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┤ą╗čÅ ą░ą▓č鹊ąĮąŠą╝ąĮąŠą╣ čĆą░ą▒ąŠčéčŗ čü ąĮąĄą▒ąŠą╗čīčłąŠą│ąŠ ą┐čāą╗čīčéą░,
čéą░ą║ ą║ą░ą║ čüąŠčüčéą░ą▓ą╗čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝čā ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čéčĆąĄą▒čāąĄčéčüčÅ čüą┤ąĄą╗ą░čéčī čĆąŠą▓ąĮčŗą╣ čĆąĄąĘ - ąĮąĄčāą┤ąŠą▒ąĮąŠ.
ąÉ ą▓ čüąŠą▓čüąĄą╝ ąŠčéą┤ą░ą╗čæąĮąĮąŠą╝ ą▒čāą┤čāčēąĄą╝, ą▓ąŠąĘą╝ąŠąČąĮąŠ, ą┐ąŠą╗čāčćąĖčéčüčÅ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠ USB
( čŹč鹊 ą║ąŠą│ą┤ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ąŠą┐ąĖčüą░ąĮąĖąĄ čłą░ą│ąŠą▓ čü USB-UART ąĖ čüą░ą╝ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čłą░ą│ąĖ ).
ą×ą┐ąĖčüčŗą▓ą░ąĄą╝čŗą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čŹą║ą▓ąĖą▓ą░ą╗ąĄąĮč鹥ąĮ 4-ą╝ čéą░ą║ąĖą╝ ą╝ąŠą┤čāą╗čÅą╝ + ą┐ą╗ą░čéą░ ąŠą┐č鹊čĆą░ąĘą▓čÅąĘą║ąĖ.
ą×čéą╗ąĖčćąĖčÅ:
- ą▓ čćąĖą┐ą░čģ Allegro ą▓čŗą▒čĆąŠčüčŗ č鹊ą║ą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ čéčĆą░ąĮąĘąĖčüč鹊čĆąŠą▓ ą╝ąŠčüčéą░ ąĖą│ąĮąŠčĆąĖčĆčāčÄčéčüčÅ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ - 1us. ąŚą┤ąĄčüčī ą▓čŗą▒čĆąŠčüčŗ ą┐ąŠą┤ą░ą▓ą╗čÅčÄčéčüčÅ čåąĄą┐ąŠčćą║ąŠą╣ R1C1;
- čćąĖą┐čŗ Allegro čāą╝ąĄčÄčé ą▓ą║ą╗čÄčćą░čéčī “čĆąĄąČąĖą╝ ą▒čŗčüčéčĆąŠą│ąŠ čüąĮąĖąČąĄąĮąĖčÅ č鹊ą║ą░”. ąĢčüą╗ąĖ ąĮą░ čüą╗ąĄą┤čāčÄčēąĄą╝ ą╝ąĖą║čĆąŠčłą░ą│ąĄ č鹊ą║ ą▓ ąŠą▒ą╝ąŠčéą║ąĄ ą┤ąŠą╗ąČąĄąĮ čüąĮąĖąĘąĖčéčüčÅ, čćąĖą┐ ą║čĆą░čéą║ąŠą▓čĆąĄą╝ąĄąĮąĮąŠ čłčāąĮčéąĖčĆčāąĄčé ąŠą▒ą╝ąŠčéą║čā, ąŠčéą║čĆčŗą▓ą░čÅ čéčĆą░ąĮąĘąĖčüč鹊čĆčŗ ą╝ąŠčüčéą░. ąÆą▓ąĄą┤ąĄąĮąĖąĄ čéą░ą║ąŠą╣ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą▓ ą┤ą░ąĮąĮčŗą╣ (čāąĮąĖą┐ąŠą╗čÅčĆąĮčŗą╣) ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čüą╗ąĖčłą║ąŠą╝ čüąĖą╗čīąĮąŠ čāčüą╗ąŠąČąĮąĖą╗ąŠ ą▒čŗ čüčģąĄą╝čā;
- čā A4983 ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čćą░čüč鹊čéą░ ąĖą╝ą┐čāą╗čīčüąŠą▓ Step čüąŠčüčéą░ą▓ą╗čÅąĄčé 1/2ą╝ą║čü = 500ą║ąōčå.
ą» ą┐čĆąŠą▒ąŠą▓ą░ą╗ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī ąŠą┤ąĖąĮ ąĖ č鹊čé ąČąĄ ą┤ą▓ąĖą│ą░č鹥ą╗čī ą║ čŹč鹊ą╝čā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā ą▓ čāąĮąĖą┐ąŠą╗čÅčĆąĮąŠą╝ ąĖ ą║ A4983 ą▓ ą▒ąĖą┐ąŠą╗čÅčĆąĮąŠą╝ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĖ.
ąĪčāą▒čŖąĄą║čéąĖą▓ąĮąŠ, čāąĮąĖą┐ąŠą╗čÅčĆąĮąŠąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą┤ą░ą▓ą░ą╗ąŠ ą▒ąŠą╗čīčłąĖą╣ ą╝ąŠą╝ąĄąĮčé ąĮą░ ą▓čŗčüąŠą║ąĖčģ čüą║ąŠčĆąŠčüčéčÅčģ.
ąÆąŠąĘą╝ąŠąČąĮąŠ, ąĖąĘ-ąĘą░ ą╝ąĄąĮčīčłąĄą╣ ąĖąĮą┤čāą║čéąĖą▓ąĮąŠčüčéąĖ ąŠą▒ą╝ąŠčéą║ąĖ ą┐čĆąĖ čāąĮąĖą┐ąŠą╗čÅčĆąĮąŠą╝ ą▓ą║ą╗čÄč湥ąĮąĖąĖ.






ą¤čĆąŠčłąĖą▓ą║ą░ ąĮą░ą┐ąĖčüą░ąĮą░ ąĮą░ ąĪ ą┤ą╗čÅ CodevisionAVR 2.05.
ą¤čĆąĖ ą▒ąŠą╗čīčłąŠą╝ ąČąĄą╗ą░ąĮąĖąĖ, ąŠčüąĮąŠą▓ąĮąŠą╣ čåąĖą║ą╗ ą╝ąŠąČąĮąŠ ą┐ąĄčĆąĄą┐ąĖčüą░čéčī ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ ąĖ čāą▓ąĄą╗ąĖčćąĖčéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ čćą░čüč鹊čéčā ąĖą╝ą┐čāą╗čīčüąŠą▓ Step ą┤ąŠ ~20ą║ąōčå.
ą¤čĆąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĮčāąČąĮąŠ ąŠčéą║ą╗čÄčćą░čéčī ą┐ąĖčéą░ąĮąĖąĄ ąŠčé čüąĖą╗ąŠą▓ąŠą╣ čćą░čüčéąĖ.

ąÆ ąĖą┤ąĄą░ą╗čīąĮąŠą╝ čüą╗čāčćą░ąĄ, čāą┐čĆą░ą▓ą╗čÅčÄčēą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ąŠą╗ąČąĮą░ čāą╝ąĄčéčī č乊čĆą╝ąĖčĆąŠą▓ą░čéčī ąĖą╝ą┐čāą╗čīčüčŗ Step č鹊čćąĮąŠ čü čéčĆąĄą▒čāąĄą╝ąŠą╣ čćą░čüč鹊č鹊ą╣.
ąØą░ ą┐čĆą░ą║čéąĖą║ąĄ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ Mach3 ąĖ ą┐ąŠą┤ąŠą▒ąĮčŗčģ, ą┤čĆą░ą╣ą▓ąĄčĆ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠą╣ čćą░čüč鹊č鹥 (Kernel speed):
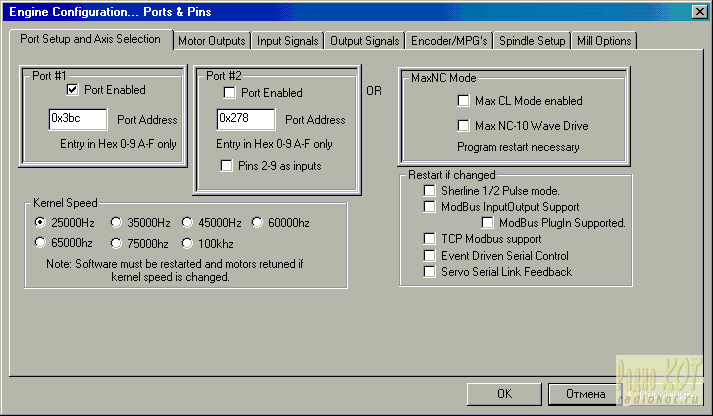
ą¤ąŠčŹč鹊ą╝čā Mach3 čāą╝ąĄąĄčé č乊čĆą╝ąĖčĆąŠą▓ą░čéčī ąĖą╝ą┐čāą╗čīčüčŗ č鹊ą╗čīą║ąŠ ąĮą░ ą│čĆą░ąĮąĖčåą░čģ ą┐ąĄčĆąĖąŠą┤ąŠą▓ Kernel speed.
ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čüč乊čĆą╝ąĖčĆąŠą▓ą░čéčī ąĖą╝ą┐čāą╗čīčüčŗ čü čćą░čüč鹊č鹊ą╣ 16kHz (ą┐ąĄčĆąĖąŠą┤ - 62,5ą╝ą║čü)
ą┐čĆąĖ čćą░čüč鹊č鹥 čÅą┤čĆą░ 25kHz (ą┐ąĄčĆąĖąŠą┤ - 40ą╝ą║čü), č鹊 ąĖą╝ą┐čāą╗čīčüčŗ ą▒čāą┤čāčé čüą╗ąĄą┤ąŠą▓ą░čéčī ąĮąĄčĆą░ą▓ąĮąŠą╝ąĄčĆąĮąŠ - čü ą┐ąĄčĆąĖąŠą┤ą░ą╝ąĖ, ą║čĆą░čéąĮčŗą╝ąĖ 40ą╝ą║čü:

ąśąĘ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░ą╝ą╝čŗ ąĮą░ ą▓čŗčģąŠą┤ąĄ ąŠą┐čéčĆąŠąĮą░ ą▓ąĖą┤ąĮąŠ, čćč鹊 ą▓čĆąĄą╝čÅ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┤ą╗čÅ čāą▓ąĄčĆąĄąĮąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ “1” ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ čüąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆąĖą╝ąĄčĆąĮąŠ 50ą╝ą║čü.
ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ąĮčāąČąĮąŠ ą▓čŗą┤ąĄčƹȹ░čéčī “ąĄą┤ąĖąĮąĖčåčā” ąŠą┤ąĖąĮ čåąĖą║ą╗ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ (26ą╝ą║čü), ąĖč鹊ą│ąŠ ~76ą╝ą║čü.
ą¤ąŠčŹč鹊ą╝čā ą┐čĆąĖ čćą░čüč鹊č鹥 čÅą┤čĆą░ 25ą║ąōčå, ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čćą░čüč鹊čéą░ ąĖą╝ą┐čāą╗čīčüąŠą▓ Step ąĮąĄ ą┤ąŠą╗ąČąĮą░ ą┐čĆąĄą▓čŗčłą░čéčī 12500ą║ąōčå, čćč鹊ą▒čŗ ą╝ąĄąČą┤čā ąĖą╝ą┐čāą╗čīčüą░ą╝ąĖ ą▒čŗą╗ąŠ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ą┤ą▓ą░ ą┐ąĄčĆąĖąŠą┤ą░ ą┐ąŠ 40 ą╝ą║čü:

ąöą╗čÅ čŹč鹊ą│ąŠ ą┤ąŠą╗ąČąĮąŠ čüąŠą▒ą╗čÄą┤ą░čéčīčüčÅ čāčüą╗ąŠą▓ąĖąĄ:
Steps per * Velocity / 60 < 12500
ą¤ąŠą╗čÅčĆąĮąŠčüčéčī ąĖą╝ą┐čāą╗čīčüąŠą▓ Step ą▓čŗčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠą╣:

ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĮą░ č鹊ą║ąŠąĖąĘą╝ąĄčĆąĖč鹥ą╗čīąĮąŠą╝ čĆąĄąĘąĖčüč鹊čĆąĄ, ąĮąĖąĘą║ą░čÅ ąĖ čüčĆąĄą┤ąĮčÅčÅ čüą║ąŠčĆąŠčüčéčī ą▓čĆą░čēąĄąĮąĖčÅ (Microstep 8x):

(ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▒ą╗ąĖąĘą║ąĖą╝ ą║ abs(sin(x))).
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĮą░ č鹊ą║ąŠąĖąĘą╝ąĄčĆąĖč鹥ą╗čīąĮąŠą╝ čĆąĄąĘąĖčüč鹊čĆąĄ, ą▓čŗčüąŠą║ą░čÅ čüą║ąŠčĆąŠčüčéčī ą▓čĆą░čēąĄąĮąĖčÅ:

ą×ą▒čēąĄąĮąĖąĄ čü ą╝ąĖą║čĆąŠčüčģąĄą╝ąŠą╣ M62359 ąĖą┤ąĄčé ąĮą░ čćą░čüč鹊č鹥, ą┐čĆąĄą▓čŗčłą░čÄčēąĄą╣ ąĘą░čÅą▓ą╗ąĄąĮąĮčŗąĄ ą▓ ą┤ą░čéą░čłąĖč鹥, ą┐ąŠčŹč鹊ą╝čā ąĄčæ ąČąĄą╗ą░č鹥ą╗čīąĮąŠ ąĘą░ą╝ąĄąĮąĖčéčī ąĮą░ čćč鹊-č鹊 ą▒ąŠą╗ąĄąĄ ą▒čŗčüčéčĆąŠąĄ.
ąØą░ ą┐čĆą░ą║čéąĖą║ąĄ čÅ ąĮąĄ ąĮą░ą▒ą╗čÄą┤ą░ą╗ ą┐čĆąŠą▒ą╗ąĄą╝ ą▓ čĆą░ą▒ąŠč鹥 ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ą£ąĮąĄ čāą┤ą░čæčéčüčÅ čāčüą┐ąĄčłąĮąŠ čäčĆąĄąĘąĄčĆąŠą▓ą░čéčī ą┐ąĄčćą░čéąĮčŗąĄ ą┐ą╗ą░čéčŗ, ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą║ąŠč鹊čĆčŗčģ ą▓ą║ą╗čÄčćą░ąĄčé čłčéčĆąĖčģąŠą▓ą║čā ą▓čüąĄą╣ ą┐ą╗ą░čéčŗ čü čłą░ą│ąŠą╝ 0.3ą╝ą╝:
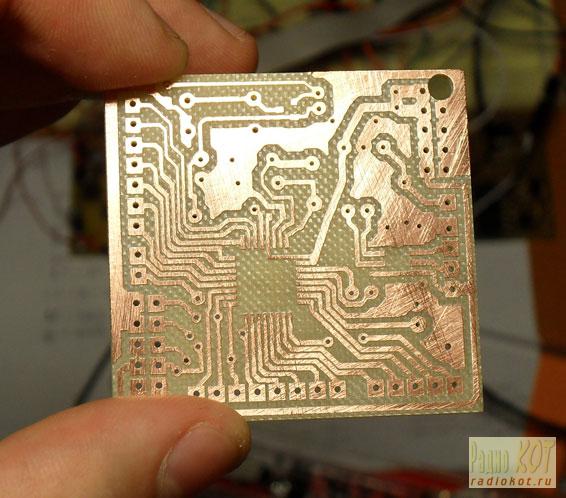
ą¤ą╗ą░čéčŗ čüąĖą╗ąŠą▓ąŠą╣ čćą░čüčéąĖ čĆą░ąĘą▓ąŠą┤ąĖą╗ąĖčüčī “ąĮą░ ą▓čüąĄ čüą╗čāčćą░ąĖ ąČąĖąĘąĮąĖ”. ąÆąŠąĘą╝ąŠąČąĮąŠ ąĖą╝ąĄąĄčé čüą╝čŗčüą╗ čāą▒čĆą░čéčī ą┐ąŠčüą░ą┤ąŠčćąĮčŗąĄ ą╝ąĄčüčéą░ ą┤ą╗čÅ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮčŗčģ ą┤ąĄčéą░ą╗ąĄą╣ ąĖ čāą╝ąĄąĮčīčłąĖčéčī ą│ą░ą▒ą░čĆąĖčéčŗ. ąśą╗ąĖ čüą┤ąĄą╗ą░čéčī ą▓ąĄčüčī ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĮą░ ąŠą┤ąĮąŠą╣ ą▒ąŠą╗čīčłąŠą╣ ą┐ą╗ą░č鹥 ą▓ SMD ą▓ą░čĆąĖą░ąĮč鹥.
ąĪąĖą╗ąŠą▓čŗąĄ ą┐ą╗ą░čéčŗ ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░ą╗ąŠčüčī ą▓čüčéą░ą▓ą╗čÅčéčī ą▓ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą╝ąŠą┤čāą╗čī ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠ, ą║ą░ą║ ą▓ ą╝ą░č鹥čĆąĖąĮčüą║čāčÄ ą┐ą╗ą░čéčā ą║ąŠą╝ą┐čīčÄč鹥čĆą░, ąĮąŠ ą▓ ąĖč鹊ą│ąĄ čüą┤ąĄą╗ą░ą╗ ąĮą░ čłą╗ąĄą╣čäą░čģ. ąśąĘ-ąĘą░ čŹč鹊čé čłą╗ąĄą╣čäčŗ ą┐čĆąĖčłą╗ąŠčüčī ą┐ąĄčĆąĄąČąĖą╝ą░čéčī čüąŠ čüą┤ą▓ąĖą│ąŠą╝. ąĢčüą╗ąĖ ą▒čŗ ą┤ąĄą╗ą░ą╗ ąĖąĘąĮą░čćą░ą╗čīąĮąŠ - čĆą░ąĘą▓čæą╗ ą▒čŗ ą┐ąŠą┤ ą│ąŠč鹊ą▓čŗąĄ čłą╗ąĄą╣čäčŗ ąŠčé ą┤ąĖčüą║ąŠą▓ąŠą┤ąŠą▓.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĮąĄ ą┐čĆąŠą▓ąĄčĆčÅą╗čüčÅ čü č鹊ą║ą░ą╝ąĖ ą▒ąŠą╗čīčłąĄ 2ąÉ - ą▓ąŠąĘą╝ąŠąČąĮąŠ, čüą╗ąĄą┤čāąĄčé čāą┤ąĄą╗ąĖčéčī ą▒ąŠą╗čīčłąĄ ą▓ąĮąĖą╝ą░ąĮąĖčÅ čĆą░ąĘą▓ąŠą┤ą║ąĄ.
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ąĮčÅčéčī ą▓ą┐ą╗ąŠčéčī ą┤ąŠ 60ąÆ. ą¤čĆąĖ čŹč鹊ą╝ ąĮčāąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī čéčĆą░ąĮąĘąĖčüč鹊čĆčŗ ą▓ ą▒ąŠą╗čīčłąĖą╝ Vdss ąĖ ą┐ąŠą┤ąŠą▒čĆą░čéčī čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ R8 ą▓ čåąĄą┐ąĖ ą┐ąĖčéą░ąĮąĖčÅ UC3842 (ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ čüąŠą┤ąĄčƹȹĖčé ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čüčéą░ą▒ąĖą╗ąĖčéčĆąŠąĮ ąĮą░ 30ąÆ). ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ ąĮąĄą╗čīąĘčÅ ą┐ąŠą┤ąĮąĖą╝ą░čéčī ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠ, ą┐ąŠč鹊ą╝čā čćč鹊 ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ą┐čĆąŠą▒ąŠą╣ ą▓ ąŠą▒ą╝ąŠčéą║ą░čģ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ.
ąóą░ą║ąČąĄ ąŠą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ ąĮą░ (ąĮąĄčüčéą░ąĮą┤ą░čĆčéąĮčŗą╣) čĆą░ąĘčŖčæą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆą░.
ąĪčĆą░ąĘčā čģąŠčćčā ą┐čĆąĄą┤čāą┐čĆąĄą┤ąĖčéčī, čćč鹊 ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ąĮčāąČąĄąĮ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░čä.
ąæąĄąĘ ąĮąĄą│ąŠ ą┐ąŠąĮčÅčéčī, čćč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ ąŠą▒ą╝ąŠčéą║ą░čģ, ą▒čāą┤ąĄčé ąĮąĄą▓ąŠąĘą╝ąŠąČąĮąŠ.
UC3842 CURRENT MODE PWM CONTROLLER
https://www.ti.com/lit/ds/symlink/uc3842.pdf
DMOS Microstepping Driver with Translator A4983
https://www.allegromicro.com/~/media/Files/Datasheets/A4983-Datasheet.ashx
ąŻčüą║ąŠčĆąĄąĮąĖąĄ čłą░ą│ąŠą▓čŗčģ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣
https://vri-cnc.ru/modules.php?name=News&file=article&sid=22
ąŻčüą║ąŠčĆąĄąĮąĖąĄ čłą░ą│ąŠą▓čŗčģ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣ 2
https://vri-cnc.ru/modules.php?name=News&file=article&sid=4&mode=&order=0&thold=0
Losing steps in Mach3: Kernel Speed, Pulse Width and "Sherline 1/2 Pulse mode"
https://ivan.blogs.chimerical.com.au/post/2010/07/07/Losing-steps-in-Mach3-Kernel-Speed-Pulse-Width-and-Sherline-12-Pulse-mode.aspx
ąŁą╗ąĄą║čéčĆąŠąĮąĖą║ą░ ąĖ ą╝ąĄčģą░ąĮąĖą║ą░ ą┤ąŠą╝ą░čłąĮąĄą│ąŠ 3-čģ ą║ąŠąŠčĆą┤ąĖąĮą░čéąĮąŠą│ąŠ čüčéą░ąĮą║ą░ ą¦ą¤ąŻ (Hobby CNC).
https://radiokot.ru/lab/hardwork/33/
hCNC3+ (ATMega16, StepDir, 3 axis, ą©ąśą£, čĆčāčćąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ).
https://vri-cnc.ru/modules.php?name=Forums&file=viewtopic&t=1438&start=0&postdays=0&postorder=asc&highlight=
ą¤čĆąŠčüč鹊ą╣ ą▒ąĖą┐ąŠą╗čÅčĆąĮčŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ąĮą░ Pic
https://cncmasterkit.ru/viewtopic.php?f=3&t=1393
ą£ąĖą║čĆąŠčłą░ą│ąŠą▓čŗą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čłą░ą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ąĮą░ ą▒ą░ąĘąĄ PIC18F2320 V4.1
https://robozone.su/cnc-home/50-mikroshagovyjj-kontroller-shagovogo-dvigatelja-na.html
STEP/DIR ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ 3-čģ čłą░ą│ąŠą▓čŗčģ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣ ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ (ą┤ą╗čÅ čüčéą░ąĮą║ą░ ą¦ą¤ąŻ)
https://radiokot.ru/circuit/digital/automat/25/
3 axis STEP-DIR controller
https://www.deep-shadows.com/hax/wordpress/?page_id=455
ążą░ą╣ą╗čŗ:
ąĪčģąĄą╝ą░, ą┐ąĄčćą░čéą║ąĖ ( Proteus )
ąśčüčģąŠą┤ąĮčŗąĄ ą║ąŠą┤čŗ (Codevision AVR 2.05)
ąÆčüąĄ ą▓ąŠą┐čĆąŠčüčŗ ą▓
ążąŠčĆčāą╝.
|
ąÜą░ą║ ą▓ą░ą╝ čŹčéą░ čüčéą░čéčīčÅ?
|
ąŚą░čĆą░ą▒ąŠčéą░ą╗ąŠ ą╗ąĖ čŹč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ čā ą▓ą░čü?
|
|
|
|








