|
ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - ąĀą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čÄ čćą░čüč鹊čéąĮąĖą║ ą┤ą╗čÅ ąÉąö, ą┐ąŠą┤čüą║ą░ąČąĖč鹥 ą┐ąŠąČą░ą╗čāą╣čüčéą░.
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
 
|
ąĪčéčĆą░ąĮąĖčåą░ 15 ąĖąĘ 36
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 712 ] |
... , , , , , , ... |
| ąÉą▓č鹊čĆ |
ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
Sanchogus

|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čÄ čćą░čüč鹊čéąĮąĖą║ ą┤ą╗čÅ ąÉąö, ą┐ąŠą┤čüą║ą░ąČąĖč鹥 ą┐ąŠąČą░ą╗čāą╣čüčéą░.  ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé čÅąĮą▓ 03, 2017 20:36:23 |
|
| ąØą░čłąĄą╗ čéčĆą░ąĮąĘąĖčüč鹊čĆ. ą¤ąŠąĮčÄčģą░ą╗. |
 |
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 97
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ąŠą║čé 07, 2015 13:13:40
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 180
ą×čéą║čāą┤ą░: ą£ą×, ą│. ąÆąŠčüą║čĆąĄčüąĄąĮčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 4
|
ąŁč鹊 ąĮą░ą▒čĆąŠčüą║ąĖ ą│ąŠą▓ąĮąŠą║ąŠą┤ą░, ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ čÅ ą┐ąŠąĮčÅą╗, čćč鹊 čüąĮą░čćą░ą╗ą░ ąĮą░ą┤ąŠ ą┤čāą╝ą░čéčī, ą░ ąĮąĄ ą┐ąĖčüą░čéčī, ąĮąŠ ą┤ą░ ą╗ą░ą┤ąĮąŠ.  https://yadi.sk/d/Eo4cP9i236jjoJ https://yadi.sk/d/Eo4cP9i236jjoJą¤čĆąŠąĄą║čé ąĖąĘ ą╝ąĮąŠą│ąĖą╝ ąĮąĄąĮą░ą▓ąĖčüčéąĮąŠą│ąŠ CubeMX'ą░. ąĢčüčéčī ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ą┤ąĄą┤čéą░ą╣ą╝ čüą║ąŠą╗čīą║ąŠ-č鹊 čéą░ą╝, ąĖą▒ąŠ ąŠąĮ ą▓ ą┐ąŠą┐čāą│ą░čÅčģ. (ą╝ąŠą│čā ąĘą░ą╝ąĄčĆąĖčéčī, ąĄčüą╗ąĖ ąĮąĮą░ą┤ąŠ) ąóą░ą╝ čüąŠą▒čüčéą▓ąĄąĮąĮąŠ čāą║ą░ąĘą░ąĮčŗ ąŠčüąĮąŠą▓ąĮčŗąĄ ąĮąŠą│ąĖ ą┤ą╗čÅ ą©ąśą£ą░. ąØąŠą│ąĖ DISP - ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą┤ąĖčüą┐ą╗ąĄčÅ 1602. (ąĮą░čüą║ąŠą╗čīą║ąŠ čÅ ą┐ąŠą╝ąĮčÄ ą▓ 4čģ ą▒ąĖčéąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čé.ąĄ. 0-3, ą▓čĆąŠą┤ąĄ, ą╝ąŠąČąĮąŠ čāą▒čĆą░čéčī) ąĀąĄąĘąĄčĆą▓ ą┐ąŠą┤ 菹Įą║ąŠą┤ąĄčĆ čü ą║ąĮąŠą┐ą║ąŠą╣ (TIM2), ą║ąĮąŠą┐ą║čā čüč鹊ą┐. ąśą▒ąŠ ąĮą░ ą╝ąŠą╣ ą▓ąĘą│ą╗čÅą┤ ą┐ąŠčüą╗ąĄ ą╝ą░ą│ąĮąĖč鹊ą╗čŗ - ą╗čāčćčłąĄ 菹Įą║ąŠą┤ąĄčĆ(č鹥ą╝ ą▒ąŠą╗ąĄąĄ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣!) čü ą║ąĮąŠą┐ą║ąŠą╣, č湥ą╝ 3 ą║ąĮąŠą┐ą║ąĖ. ą£ąŠąČąĮąŠ ą▒čāą┤ąĄčé ą┐čĆąĖ ąČąĄą╗ą░ąĮąĖąĖ ą║čĆčāčéąĖčéčī ą╝ąĄąĮčÄčłą║čā čü č鹊ą╣ čüą║ąŠčĆąŠčüčéčīčÄ, čü ą║ą░ą║ąŠą╣ čģąŠč湥čłčī. ąĀąĄąĘąĄčĆą▓ ą┐ąŠą┤ UART - ą╝ąŠąČąĮąŠ čüą╝ąĄą╗ąŠ čāą▒čĆą░čéčī. ąĢčüčéčī ą┐ąŠą┤ąŠą▒ąĖąĄ ąĮą░ ą┐ą╗ą░ą▓ąĮčŗą╣ ą▓čŗčģąŠą┤ ąĮą░ ąĘą░ą┤ą░ąĮąĮčāčÄ čćą░čüč鹊čéčā. (ą┐čĆą░ą▓ą┤ą░ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ąĄčæ ą▓ą▓ąŠą┤ ąĖąĘą▓ąĮąĄ, č鹊ą╗čīą║ąŠ ąĖąĘ ąŠčéą╗ą░ą┤čćąĖą║ą░ ą┐ąŠą║ą░  ) ąöąĖčüą┐ą╗ąĄą╣ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ąŠčüčéčŗą╗čīąĮčŗą╝ čüą░ą╝ąŠą┐ą░ą╗čīąĮčŗą╝ ą║ąŠą┤ąŠą╝, čāą╝ąĄąĄčé čüčāą┐ąĄčĆ ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ. _____ ą£ąŠąČąĮąŠ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī ą▓ąŠąĘąŠą▒ąĮąŠą▓ąĖčéčī čŹč鹊 ą┤ąĄą╗ąŠ, ąĮąŠ ąĮą░ą┤ąŠ ą▒čŗ čüą┐ąĖčüąŠą║ č鹊ą│ąŠ, čćč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ: čüčéčĆčāą║čéčāčĆčā ą╝ąĄąĮčÄ, ąĮą░ą▒ąŠčĆ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░ ąĖ čé.ą┐. ąØčā ąĖ ąĄčüą╗ąĖ ą║ąŠą╝čā ąĮą░ą┤ąŠ ą╝ąŠą│čā ąŠą▒čŖčÅčüąĮąĖčéčī, ą║ą░ą║ čŹč鹊čé čāąČą░čü čĆą░ą▒ąŠčéą░ąĄčé. ą£ąŠąČąĮąŠ ąŠčüčéą░ą▓ąĖčéčī č鹊ą╗čīą║ąŠ čüą░ą╝čā ą│ąĄąĮąĄčĆą░čåąĖčÄ čüąĖąĮčāčüą░ ąĖ ąŠčé ąĮąĄčæ ą┐ą╗čÅčüą░čéčī čü ą┐ąŠčćčéąĖ čćąĖčüč鹊ą│ąŠ ą╗ąĖčüčéą░. ąś ą┤ą░, ąĮąŠą│ąĖ ą┤ąĖčüą┐ą╗ąĄčÅ ą┐ąŠą┤ąŠą▒čĆą░ąĮčŗ 5V tolerant
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
 |
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Sanchogus
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čÄ čćą░čüč鹊čéąĮąĖą║ ą┤ą╗čÅ ąÉąö, ą┐ąŠą┤čüą║ą░ąČąĖč鹥 ą┐ąŠąČą░ą╗čāą╣čüčéą░. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čÅąĮą▓ 04, 2017 22:30:47 |
|
| ąØą░čłąĄą╗ čéčĆą░ąĮąĘąĖčüč鹊čĆ. ą¤ąŠąĮčÄčģą░ą╗. |
|
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 97
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ąŠą║čé 07, 2015 13:13:40
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 180
ą×čéą║čāą┤ą░: ą£ą×, ą│. ąÆąŠčüą║čĆąĄčüąĄąĮčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 4
|
ąöąŠą▒ą░ą▓ąĖą╗ ąĄčēąĄ ą▒ąŠą╗čīčłąĄ ą▒čŗą┤ą╗ąŠą║ąŠą┤ą░ ą┤ą╗čÅ ą▒ąŠą│ą░ ą▒čŗą┤ą╗ąŠą║ąŠą┤ą░! ąóąĄą┐ąĄčĆčī ąŠąĮ čāą╝ąĄąĄčé ąŠč鹊ą▒čĆą░ąČą░čéčī čüą▓ąŠąĖ čćą░čüč鹊čéčā ąĖ ą░ą╝ą╗ąĖčéčāą┤čā, čāą╝ąĄąĄčé ą╝ąĄąĮčÅčéčī ą┐ąŠ ąŠčéą┤ąĄą╗čīąĮąŠčüčéąĖ čćą░čüč鹊čéčā ąĖ ą░ą╝ą┐ą╗ąĖčéčāą┤čā.  ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ 菹Įą║ąŠą┤ąĄčĆ čü ą║ąĮąŠą┐ą║ąŠą╣, ą▓ąŠčé čüą▓ąĄąČąĖą╣ ą▓ąĖą┤ąŠčüąĖą║. ą×čüč鹊čĆąŠąČąĮąŠ, ą▓ ą▓ąĖą┤ąĄąŠ ą┐čĆąŠą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆąŠą▓ą░ąĮ čüčĆą░čć ąĖ čģą░ąŠčü, čüčéčĆą░čłąĮąĄą╣čłą░čÅ ą┐ąĄčćą░čéąĮą░čÅ ą┐ą╗ą░čéą░ ąĖ čüąŠą┐ą╗ąĖ! https://yadi.sk/i/pxrS0F6g36yHKUąÜąŠą╝čā ąĮą░ą┤ąŠ čŹčéčā ąČąĄčüčéčī, ą▓ąŠčé ąĖčüčģąŠą┤ąĮąĖą║ąĖ: https://yadi.sk/d/R6qxFziZ36yFUFąÆ ą▒ą╗ąĖąČą░ą╣čłąĖąĄ ą┤ąĮąĖ, ą▓ąŠąĘą╝ąŠąČąĮąŠ, ą┤ąŠą┐ąĖą╗čÄ ą▓ ą╝ąĄąĮčÄčłą║čā ąĮą░čüčéčĆąŠą╣ą║čā čüą║ąŠčĆąŠčüčéąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čćą░čüč鹊čéčŗ, ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▓ą║ą╗/ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą©ąśą£ą░, ąĮčā ąĖ ą╝ąŠąČąĄčé ąĄčēąĄ č湥ąĮąĖčéčī, čéąĖą┐ąŠ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čüąŠąŠčéąĮąŠčłąĄąĮąĖčÅ U/f, U^2/f, U/f^2, ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┤ąĄą┤čéą░ą╣ą╝ąŠą▓, ąĮčā ąĖą╗ąĖ ą┐ąŠą┤čüą║ą░ąČąĄč鹥 čćč鹊 ąĖąĮč鹥čĆąĄčüąĮąŠą│ąŠ. ą¢ą┤čā ą┐ąŠą╝ąĖą┤ąŠčĆčŗ ą▓ čüą▓ąŠą╣ ą░ą┤čĆąĄčü ąĖ ą┐ąŠąČąĄą╗ą░ąĮąĖčÅ. 
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Sanchogus
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čÄ čćą░čüč鹊čéąĮąĖą║ ą┤ą╗čÅ ąÉąö, ą┐ąŠą┤čüą║ą░ąČąĖč鹥 ą┐ąŠąČą░ą╗čāą╣čüčéą░. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé čÅąĮą▓ 06, 2017 16:28:17 |
|
| ąØą░čłąĄą╗ čéčĆą░ąĮąĘąĖčüč鹊čĆ. ą¤ąŠąĮčÄčģą░ą╗. |
|
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 97
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ąŠą║čé 07, 2015 13:13:40
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 180
ą×čéą║čāą┤ą░: ą£ą×, ą│. ąÆąŠčüą║čĆąĄčüąĄąĮčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 4
|
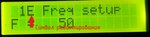
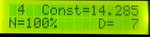
ąśčéą░ą║, ą┐čĆąĖą▓ąĄą╗ čŹč鹊 ą┤ąĄą╗ąŠ ą║ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąČąĖąĘąĮąĄčüą┐ąŠčüąŠą▒ąĮąŠą╝čā ą▓ą░čĆąĖą░ąĮčéčā. ą¦č鹊 ąĄčüčéčī: ą©ąśą£ 9 ą║ąōčå. ąŁąĮą║ąŠą┤ąĄčĆ čü ą║ąĮąŠą┐ą║ąŠą╣ ą×ąÜ, ą║ąĮąŠą┐ą║ą░ ąĪąóą×ą¤, ą║ąĮąŠą┐ą║ą░ ąĪąóąÉąĀąó ą£ąĄąĮčÄčłą║ą░ 0 čü ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄą╝ č鹥ą║čāčēąĄą╣ čćą░čüč鹊čéčŗ ąĖ ą░ą╝ą┐ą╗ąĖčéčāą┤čŗ ąĖ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ ą©ąśą£ (STOP - ą©ąśą£ą░ ąĮąĄčé, STRT - ąĖą┤ąĄčé ąĘą░ą┐čāčüą║ ą©ąśą£, ZERO - č湥čĆąĄą┤ąŠą▓ą░ąĮąĖąĄ ąĮčāą╗ąĄą▓čŗčģ ą▓ąĄą║č鹊čĆąŠą▓ - ą▓ąĄčĆčģąĮąĖąĄ ąŠčéą║čĆ, ąĮąĖąČąĮąĖąĄ ąĘą░ą║čĆčŗčéčŗ ąĖ ąĮą░ąŠą▒ąŠčĆąŠčé, RUN - ą│ąĄąĮąĄčĆą░čåąĖčÅ čüąĖąĮčāčüą░) ą£ąĄąĮčÄ 1 - ąĘą░ą┤ą░ąĮąĖąĄ čćą░čüč鹊čéčŗ, ą┐ąŠ ąĮą░ąČą░čéąĖčÄ ą║ąĮąŠą┐ą║ąĖ 菹Įą║ąŠą┤ąĄčĆą░ ą▓čģąŠą┤ąĖą╝, ą┐čĆąĖ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčéčüčÅ ą▒čāą║ą▓ą░ ąĢ. ąŁąĮą║ąŠą┤ąĄčĆąŠą╝ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ čćą░čüč鹊čéčā ąĖ ą║ąĮąŠą┐ą║ąŠą╣ 菹Įą║ąŠą┤ąĄčĆą░ ąĄčæ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░ąĄą╝. ąĢčüą╗ąĖ ąĮą░ąČą░čéčī ą║čĆą░čéą║ąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą║ąĮąŠą┐ą║čā čüč鹊ą┐, č鹊 ą▓čŗčģąŠą┤ ą▒ąĄąĘ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣. ą£ąĄąĮčÄ 2 - ąĘą░ą┤ą░ąĮąĖąĄ ą░ą╝ą┐ą╗ąĖčéčāą┤čŗ (ąĖą╝ąĄąĄčé čüą╝čŗčüą╗ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čćą░čüč鹊č鹊ą╣ ąĖ ą░ą╝ą┐ą╗ąĖčéčāą┤ąŠą╣). ąĀąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą░ąĮą░ą╗ąŠą│ąĖčćąĮąŠ. ą£ąĄąĮčÄ 3 - ą▓čŗą▒ąŠčĆ ąĘ-ąĮą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (0 - ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ą▓čŗčüčéą░ą▓ą╗čÅąĄą╝ čćą░čüč鹊čéčā ąĖ ą░ą╝ą┐ą╗ąĖčéčāą┤čā, 1 - U/f=const, 2 - U/sqrt(f) = const, 3 - U/sqr(f) = const; ą║ąŠąĮčüčéą░ąĮčéą░ ąĘą░ą┤ą░ąĄčéčüčÅ ą▓ 4ą╝ ą╝ąĄąĮčÄ) ą£ąĄąĮčÄ 4 - ąĘą░ą┤ą░ąĮąĖąĄ ą║ąŠąĮčüčéą░ąĮčéčŗ ą┤ą╗čÅ ąĘ-ąĮą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąóčāčé ą▓čüčæ č湥čĆąĄąĘ ą┐ąŠą┐čā, ąĮąŠ ą┤ą░ ą╗ą░ą┤ąĮąŠ. ąĪą┐ąŠą╣ą╗ąĄčƹ׹┐čĆąĄą┤ąĄą╗čÅąĄą╝čüčÅ čü ąĘą░ą║ąŠąĮąŠą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąöąŠą┐čāčüčéąĖą╝ U/sqrt(f) = const. ąÆ čŹč鹊ą╝čā čüą╗čāčćą░ąĄ ąĮą░ą╝ ą▓ č乊čĆą╝čāą╗čā
ąÜąŠą┤: U
------- = const
sqrt(f)
ąĮą░ą┤ąŠ ą▓ą▒ąĖčéčī čćąĖčüą╗ąĖč鹥ą╗čī ąĖ ąĘąĮą░ą╝ąĄąĮą░č鹥ą╗čī (ą║ąŠčĆąĄąĮčī ąĖą╗ąĖ ą║ą▓ą░ą┤čĆą░čé čćą░čüč鹊čéčŗ ąĮą░ą┤ąŠ čüčćąĖčéą░čéčī čĆčāčćą║ą░ą╝ąĖ. ą¤ąŠ ą▓čģąŠą┤čā ą▓ ą╝ąĄąĮčÄ čüąĮą░čćą░ą╗ą░ ą║čĆčāčéąĖčéčüčÅ č鹊, čćč鹊 ą▒čāą┤ąĄčé ą▓ čćąĖčüą╗ąĖč鹥ą╗ąĄ, čé.ąĄ. ą░ą╝ą┐ą╗ąĖčéčāą┤ą░, 菹Įą║ąŠą┤ąĄčĆąŠą╝ ą▓čŗą║čĆčāčćąĖą▓ą░ąĄą╝ ąĄąĄ ąĖ ą║čĆą░čéą║ąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąĮą░ąČąĖą╝ą░ąĄą╝ ą×ąÜ, ą┤ą░ą╗ąĄąĄ ą▓čŗčüčéą░ą▓ą╗čÅąĄą╝ ąĘąĮą░ą╝ąĄąĮą░č鹥ą╗čī (ą┤ą╗čÅ ą▓čŗčłąĄąŠą┐ąĖčüą░ąĮąĮąŠą│ąŠ ąĘ-ąĮą░ ą║ąŠčĆąĄąĮčī ąĖąĘ 50 = ~7) ąĖ ąĘą░ąČąĖą╝ą░ąĄą╝ ą║ąĮąŠą┐ą║čā ą×ąÜ ąĮą░ 1 čüąĄą║. ą¤ąŠ ąŠčéą┐čāčüą║ą░ąĮąĖčÄ ą║ąĮąŠą┐ą║ąĖ ą║ąŠąĮčüčéą░ąĮčéą░ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮą░, ą░ ą▒čāą║ą▓ą░ ąĢ ąĖąĘ ą┐ąĄčĆą▓ąŠą╣ čüčéčĆąŠą║ąĖ ąĖčüč湥ąĘąĮąĄčé.ą£ąĄąĮčÄ 5 - ą▓čĆąĄą╝čÅ ą╝ąĄąČą┤čā ąĖąĮą║čĆąĄą╝ąĄąĮčéą░ą╝ąĖ čćą░čüč鹊čéčŗ ą▓ ą╝čü. ąó.ąĄ. čüčéą░čĆčéčāąĄą╝ čü ąĮčāą╗čÅ ąĖ ą║ą░ąČą┤čŗąĄ X ą╝čü ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄą╝ čćą░čüč鹊čéčā ą┤ąŠ ąĘą░ą┤ą░ąĮąĮąŠą│ąŠ ą▓ 1-ą╝ ą╝ąĄąĮčÄ ąĘąĮą░č湥ąĮąĖčÅ. ą£ąĄąĮčÄ 7 - čüąŠčģčĆą░ąĮąĖčéčī č鹥ą║čāčēąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ. ąÆ ąĮąĄą╝ ą▒čāą┤ąĄčé ą┤ą▓ą░ ą┐čāąĮą║čéą░ - YES ąĖą╗ąĖ NO. ąśąĘ ą╗čÄą▒ąŠą│ąŠ ą╝ąĄąĮčÄ ą╝ąŠąČąĮąŠ ą▓čŗą╣čéąĖ ą▒ąĄąĘ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą║ąĮąŠą┐ą║ąŠą╣ čüč鹊ą┐ (ą║čĆą░čéą║ąŠą▓čĆąĄą╝ąĄąĮąĮčŗą╝ ąĮą░ąČą░čéąĖąĄą╝). ą£ąĄąĮčÄ 8 ą┐ąŠčćčéąĖ ą║ą░ą║ ąĖ 0-ąĄ, ąĮąŠ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé č鹥ą║čāčēčāčÄ čćą░čüč鹊čéčā ąĖ ąĘą░ą┤ą░ąĮąĮčāčÄ, ą░ čéą░ą║ąČąĄ čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ ą©ąśą£ą░. ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ: ą¤ąŠčüą╗ąĄ ąĘą░ą┐čāčüą║ą░ ą▒čāą┤ąĄčé ąŠč鹊ą▒čĆą░ąČą░čéčīčüčÅ 0-ąŠąĄ ą╝ąĄąĮčÄ ąĖ čüčéą░čéčāčü ą©ąśą£ą░ STOP, čé.ąĄ. ąĄą│ąŠ ąŠčéčüčāčéčüčéą▓ąĖąĄ. ą¤ąŠčüą╗ąĄ ą║čĆą░čéą║ąŠą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ąĮą░ąČą░čéąĖčÅ START ą▓ą║ą╗čÄčćą░ąĄčéčüčÅ ą©ąśą£ (čüčéą░čéčāčü ą©ąśą£ STRT) ąĖ čüčĆą░ąĘčā ąČąĄ ąĮą░čćąĖąĮą░ąĄčé ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčī ą▓ąĄčĆčģąĮąĖąĄ-ąĮąĖąČąĮąĖąĄ ą║ą╗čÄčćąĖ (čé.ąĄ. č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮčāą╗ąĄą▓čŗčģ ą▓ąĄą║č鹊čĆąŠą▓) - čüčéą░čéčāčü ZERO. ąĢčüą╗ąĖ ą┐čĆąĖ čüčéą░čéčāčüąĄ ZERO čüąĮąŠą▓ą░ ąĮą░ąČą░čéčī START č鹊 ąĮą░čćąĖąĮą░ąĄą╝ ąĮą░čĆą░čüčéą░ąĮąĖąĄ čćą░čüč鹊čéčŗ ąŠčé ąĮčāą╗čÅ ą┤ąŠ ąĘą░ą┤ą░ąĮąĮąŠą╣ čćą░čüč鹊čéčŗ (ą░ą╝ą┐ą╗ąĖčéčāą┤ą░ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĮą░čüčéčĆąŠąĄą║ ą╗ąĖą▒ąŠ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ą░čÅ ą╗ąĖą▒ąŠ ą▒čāą┤ąĄčé ą╝ąĄąĮčÅčéčīčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąĘą░ą║ąŠąĮąŠą╝ ąĖ ą║ąŠąĮčüčéą░ąĮč鹊ą╣). ąĪčéą░čéčāčü ą©ąśą£ ąĖąĘą╝ąĄąĮąĖčéčīčüčÅ ąĮą░ RUN. ąĢčüčéčī ąĮą░ąČą░čéčī ą║ąĮąŠą┐ą║čā ąĪąóąÉąĀąó ą▓ąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ, č鹊 ą©ąśą£ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ZERO (ąĮčāą╗ąĄą▓čŗąĄ ą▓ąĄą║č鹊čĆčŗ), ą░ čćą░čüč鹊čéą░ ą▒čāą┤ąĄčé čüą▒čĆąŠčłąĄąĮą░. ąØąĄ čüč鹊ąĖčé ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ čüąĮąŠą▓ą░ ąĮą░ąČąĖą╝ą░čéčī ą║ąĮąŠą┐ą║čā ąĘą░ą┐čāčüą║ą░ ą┤ąŠ ąŠčüčéą░ąĮąŠą▓ą░ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ))))ąĢčüčéčī ąĘą░ąČą░čéčī ą║ąĮąŠą┐ą║čā ąĪąóąÉąĀąó ąĮą░ 1 čüąĄą║ ąĖ ąŠčéą┐čāčüčéąĖčéčī, č鹊 ą┤ą▓ąĖą│ą░č鹥ą╗čī ąĮą░čćąĮąĄčé čāą▒ą░ą▓ą╗čÅčéčī čćą░čüč鹊čéčā ąŠčé č鹥ą║čāčēąĄą╣ ą┤ąŠ ąĮčāą╗čÅ, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ZERO. ąĢčüą╗ąĖ ąĘą░ąČą░čéčī ą║ąĮąŠą┐ą║čā ąĪąóą×ą¤ ąĮą░ 1 čüąĄą║ ąĖ ąŠčéą┐čāčüčéąĖčéčī, č鹊 ą©ąśą£ ą▓čŗčĆčāą▒ą░ąĄčéčüčÅ. ąØąŠą│ą░ B12 ą┤ąĄčĆą│ą░ąĄčéčüčÅ čü č鹊ą╣ ąČąĄ čćą░čüč鹊č鹊ą╣, čćč鹊 ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą▓ ą┤ą░ąĮąĮčŗą╣ ą╝ąŠą╝ąĄąĮčé. ążąŠčéą║ąĖ ą╝ąĄąĮčÄčłąĄą║, ąŠčüčåąĖą╗ą╗ąŠą│čĆą░ą╝ą╝čŗ ąĮą░ ąĮąŠą│ą░čģ čü ą║ąŠč鹊čĆčŗčģ čüąĮąĖą╝ą░ąĄčéčüčÅ ą©ąśą£, ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖčÅ ą┤ąĄą┤čéą░ą╣ą╝ą░. ąĪą┐ąŠą╣ą╗ąĄčĆą╝ąĄąĮčÄ 0

ą╝ąĄąĮčÄ 1, ą╝ąĄąĮčÄ 1 čü ą░ą║čéąĖą▓ąĮčŗą╝ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄą╝

ąŠčüčéą░ą╗čīąĮčŗąĄ ą╝ąĄąĮčÄčłą║ąĖ



 ąŚą░ą╝ąĄčĆąĄąĮąĮąŠąĄ čü ą╗ąŠą│. ą░ąĮą░ą╗ąĖąĘą░č鹊čĆą░: ąĪą┐ąŠą╣ą╗ąĄčĆą¤čĆąĖ čüčéą░čéčāčüąĄ PWM STOP
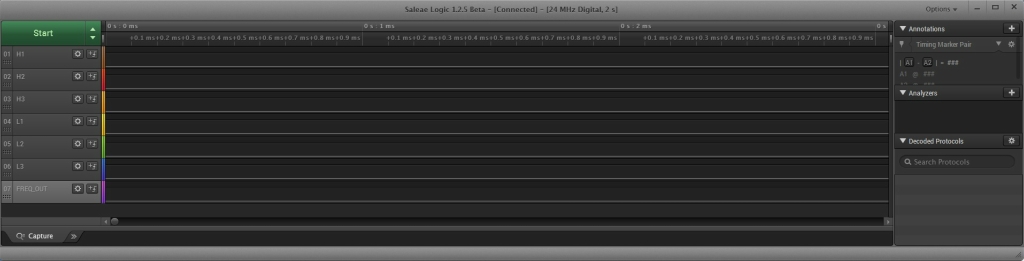
ą¤čĆąĖ PWM ZERO, tdeadtime = 1.35ą╝ą║čü (ą╝ąŠąČąĮąŠ ąĖąĘą╝ąĄąĮąĖčéčī ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ, ą┐čĆąĖ ąČąĄą╗ą░ąĮąĖąĖ

ą¤čĆąĖ ą▓čŗčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ 50ąōčå
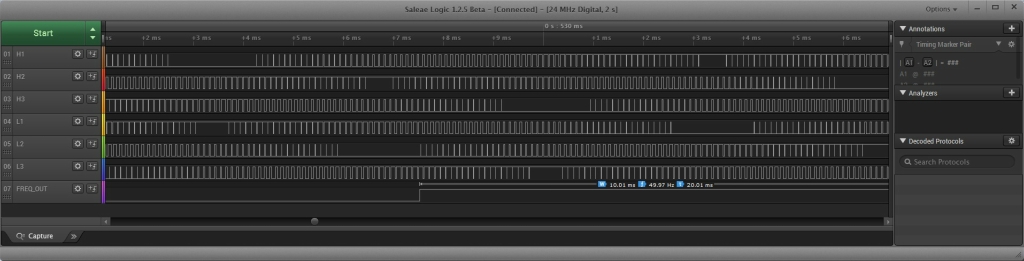
ą¤čĆąĖ ą▓čŗčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ 399ąōčå
 ąĪą║ąŠčĆąŠ ą╝.ą▒. ą┐ąŠą┐čĆąŠą▒čāčÄ ąĘą░ą┐ąĖčéą░čéčī ą┤ą▓ąĖą│ ąĮąĄ 30čÄ ąÆąŠą╗čīčéą░ą╝ąĖ, ą░ čéčĆąĄčģčüčéą░ą╝ąĖ. ąØą░ą┤ąĄčÄčüčī čüąĖą╗ąŠą▓ą░čÅ ą┐ą╗ą░čéą░ ąĮąŠčĆą╝ą░ą╗čīąĮąŠ ą║ čŹč鹊ą╝čā ąŠčéąĮąĄčüąĄčéčüčÅ.  ąśčüčģąŠą┤ąĮąĖą║ąĖ ą┤ą░ąĮąĮąŠą╣ ą▓ąĄčĆčüąĖąĖ čéčāčé: https://yadi.sk/d/qeRdxBQJ37Lqry
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ma5a97
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čÄ čćą░čüč鹊čéąĮąĖą║ ą┤ą╗čÅ ąÉąö, ą┐ąŠą┤čüą║ą░ąČąĖč鹥 ą┐ąŠąČą░ą╗čāą╣čüčéą░. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü čÅąĮą▓ 08, 2017 20:03:10 |
|
| ą¤čĆąŠčĆąĄąĘą░ą╗ąĖčüčī ąĘčāą▒čŗ |
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 13
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą╝ą░čĆ 12, 2015 01:37:52
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 218
ą×čéą║čāą┤ą░: ąöąŠąĮąĄčåą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąÆčŗą╗ąŠąČąĖ ą║ą░čĆčéąĖąĮą║ąĖ čü ą░ąĮą░ą╗ąĖąĘą░č鹊čĆą░ ą║čĆčāą┐ąĮąĄą╣ .
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąÆčŗą▒ąĖčĆą░ąĄą╝ čüčģąĄą╝čā BMS ą┤ą╗čÅ ąĘą░čĆčÅą┤ą░ ą╗ąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗčģ (LiFePO4) ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓
ą×ą▒čÅąĘą░č鹥ą╗čīąĮčŗą╝ čāčüą╗ąŠą▓ąĖąĄą╝ ą┤ąŠą╗ą│ąŠą╣ ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ Li-FePO4-ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ EVE Energy, čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ BMS-ą╝ąĖą║čĆąŠčüčģąĄą╝. ąøąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗąĄ ąÉąÜąæ ąŠčéą╗ąĖčćą░čÄčéčüčÅ čéą░ą║ąĖą╝ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ, ą║ą░ą║ ą▓čŗčüąŠą║ą░čÅ ą╝ąĮąŠą│ąŠą║čĆą░čéąĮąŠčüčéčī čåąĖą║ą╗ąŠą▓ ąĘą░čĆčÅą┤ą░-čĆą░ąĘčĆčÅą┤ą░, ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▒čŗčüčéčĆąŠą╣ ąĘą░čĆčÅą┤ą║ąĖ, čāčüč鹊ą╣čćąĖą▓ąŠčüčéčī ą║ ą▒čāč乥čĆąĮąŠą╝čā čĆąĄąČąĖą╝čā čĆą░ą▒ąŠčéčŗ ąĖ ą┐čĆąĖąĄą╝ą╗ąĄą╝ą░čÅ čüč鹊ąĖą╝ąŠčüčéčī. ąØąŠ ą┤ą╗čÅ čŹčéąĖčģ ąÉąÜąæ ąŠč湥ąĮčī ą▓ą░ąČąĄąĮ ą║ąŠąĮčéčĆąŠą╗čī ą┐čĆąŠčåąĄčüčüą░ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░ ą┤ą╗čÅ ąĖąĘą▒ąĄą│ą░ąĮąĖčÅ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĘą░čĆčÅą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ 100% ąĘą░čĆčÅą┤ą░. ąśąĮąČąĄąĮąĄčĆčŗ ąÜą×ą£ą¤ąŁąø ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖą╗ąĖ čüą┐ąĖčüąŠą║ čéą░ą║ąĖčģ čĆąĄčłąĄąĮąĖą╣ ąŠčé čĆą░ąĘąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
Sanchogus
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čÄ čćą░čüč鹊čéąĮąĖą║ ą┤ą╗čÅ ąÉąö, ą┐ąŠą┤čüą║ą░ąČąĖč鹥 ą┐ąŠąČą░ą╗čāą╣čüčéą░. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü čÅąĮą▓ 08, 2017 23:23:11 |
|
| ąØą░čłąĄą╗ čéčĆą░ąĮąĘąĖčüč鹊čĆ. ą¤ąŠąĮčÄčģą░ą╗. |
|
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 97
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ąŠą║čé 07, 2015 13:13:40
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 180
ą×čéą║čāą┤ą░: ą£ą×, ą│. ąÆąŠčüą║čĆąĄčüąĄąĮčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 4
|
ą¤čĆąŠčüč鹊 ąŠčé ą▒ąŠą╗čīčłąĖčģ ą║ą░čĆčéąĖąĮąŠą║ ą╝ąŠąČąĄčé ąĖ ą▓čüčæ ąŠą║ąĮąŠ ą┐ąĄčĆąĄą║ąŠčüąĖčéčī ąóą░ą║ čćč鹊 ą║ąĖą┤ą░čÄ čüčüčŗą╗ą║ąŠą╣ ąĮą░ ą┐ą░ą┐ą║čā, čéą░ą╝ čüąĮąĖą╝ą║ąĖ ą┐čĆąĖ ąĮčāą╗ąĄą▓ąŠą╝ čĆąĄąČąĖą╝ąĄ, ą┐čĆąĖ ą▓čŗčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ 50 ąōčå ąĖ ą▓čŗčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ 399 ąōčå (ą░ą╝ą┐ą╗ąĖčéčāą┤ą░ ą▓ąĄąĘą┤ąĄ 100%). ą¤ą╗čÄčü, ąĄčüą╗ąĖ ąĄčüčéčī ą┐čĆąŠą│ą░ ąŠčé ą░ąĮą░ą╗ąĖąĘą░č鹊čĆą░ Saleae Logic (ą▒ąĄčüą┐ą╗ą░čéąĮą░čÅ) - ą╝ąŠąČąĮąŠ ąŠčéą║čĆčŗčéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĮčŗąĄ čüąŠčģčĆą░ąĮąĄąĮąĮčŗąĄ čäą░ą╣ą╗čŗ ąĖ ą▒ąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ąĖčģ čĆą░čüčüą╝ąŠčéčĆąĄčéčī. https://yadi.sk/d/zO-1vXKW37rPfa
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
ma5a97
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čÄ čćą░čüč鹊čéąĮąĖą║ ą┤ą╗čÅ ąÉąö, ą┐ąŠą┤čüą║ą░ąČąĖč鹥 ą┐ąŠąČą░ą╗čāą╣čüčéą░. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ čÅąĮą▓ 09, 2017 00:26:15 |
|
| ą¤čĆąŠčĆąĄąĘą░ą╗ąĖčüčī ąĘčāą▒čŗ |
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 13
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą╝ą░čĆ 12, 2015 01:37:52
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 218
ą×čéą║čāą┤ą░: ąöąŠąĮąĄčåą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą» ą║ąŠą│ą┤ą░ ą┐ąŠą┤ąŠą▒ąĮčŗą╝ čüą┐ąŠčüąŠą▒ąŠą╝ čüčćąĖčéą░ą╗ ( return (sinTable[x] * amplitude) / 100;) , čü ąĖąĘą╝ąĄąĮąĄąĮąĖąĄą╝ ą░ą╝ą┐ą╗ąĖčéčāą┤čŗ ąĮą░čĆčāčłą░ą╗ą░čüčī čüąĖą╝ą╝ąĄčéčĆąĖčÅ ą┐ąŠą╗čā-ą▓ąŠą╗ąĮ . ą¤ąŠč鹊ą╝ ą╝ąĮąĄ ą┐ąŠą┤čüą║ą░ąĘą░ą╗ąĖ čćč鹊 ąĮčāąČąĮąŠ čüčćąĖčéą░čéčī ąŠčé čüąĄčĆąĄą┤ąĖąĮčŗ , ą▓ ą╝ąŠąĄą╝ čüą╗čāčćą░ąĄ čŹč鹊 127 ąĖ čü ąŠą┤ąĮąŠą╣ ą┐ąŠą╗ąŠą▓ąĖąĮą║ąĖ , ą┤ąĄą╗ą░čéčī ą▓č鹊čĆčāčÄ ą┐ąŠą╗ąŠą▓ąĖąĮčā čüąĖąĮčāčüąŠąĖą┤čŗ . ąĢčüą╗ąĖ ąĮąĄ ą┐ąŠąĮčÅčéąĮąŠ ąĮą░ą┐ąĖčüą░ą╗ čüą╝ąŠčéčĆąĖ ąĖčüčģąŠą┤ąĮąĖą║ čćč鹊 čÅ ą▓čŗą╗ąŠąČąĖą╗ , flowcode čüą║ą░čćą░ą╣ čā ą╝ąĄąĮčÅ ą▓ ąŠą▒ą╗ą░ą║ąĄ https://yadi.sk/d/IoswZLk_g7tDK ą▓ ą┐ą░ą┐ą║ąĄ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą╗ąĄąČąĖčé
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Sanchogus
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čÄ čćą░čüč鹊čéąĮąĖą║ ą┤ą╗čÅ ąÉąö, ą┐ąŠą┤čüą║ą░ąČąĖč鹥 ą┐ąŠąČą░ą╗čāą╣čüčéą░. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ čÅąĮą▓ 09, 2017 05:23:31 |
|
| ąØą░čłąĄą╗ čéčĆą░ąĮąĘąĖčüč鹊čĆ. ą¤ąŠąĮčÄčģą░ą╗. |
|
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 97
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ąŠą║čé 07, 2015 13:13:40
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 180
ą×čéą║čāą┤ą░: ą£ą×, ą│. ąÆąŠčüą║čĆąĄčüąĄąĮčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 4
|
ąĪčéčĆą░čłąĮąŠ ą▒čŗą╗ąŠ, ąĮą░ą▓ąĄčĆąĮąŠąĄ, čćąĖčéą░čéčī čŹč鹊čé ą║ąŠą┤. ąØą░ą┤ąŠ ą▒čāą┤ąĄčé čüą┤ąĄą╗ą░čéčī čüą║čĆąĖąĮ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░ą╝ą╝čŗ ąĖ ą▒ąŠą╗ąĄąĄ čéčēą░č鹥ą╗čīąĮąŠ ąĖąĘčāčćąĖčéčī čŹč鹊 ą┤ąĄą╗ąŠ. ąØąŠ čŹč鹊 čćčāčéčī ą┐ąŠąĘąČąĄ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
DC-AC
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čÄ čćą░čüč鹊čéąĮąĖą║ ą┤ą╗čÅ ąÉąö, ą┐ąŠą┤čüą║ą░ąČąĖč鹥 ą┐ąŠąČą░ą╗čāą╣čüčéą░. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé čÅąĮą▓ 10, 2017 21:13:24 |
|
| ąĪąŠą▒čāčéčŗą╗čīąĮąĖą║ ąÜąŠčéą░ |
ąÜą░čĆą╝ą░: 45
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 846
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄąĮ 26, 2014 00:04:37
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2768
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Sanchogus
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čÄ čćą░čüč鹊čéąĮąĖą║ ą┤ą╗čÅ ąÉąö, ą┐ąŠą┤čüą║ą░ąČąĖč鹥 ą┐ąŠąČą░ą╗čāą╣čüčéą░. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čÅąĮą▓ 11, 2017 05:38:21 |
|
| ąØą░čłąĄą╗ čéčĆą░ąĮąĘąĖčüč鹊čĆ. ą¤ąŠąĮčÄčģą░ą╗. |
|
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 97
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ąŠą║čé 07, 2015 13:13:40
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 180
ą×čéą║čāą┤ą░: ą£ą×, ą│. ąÆąŠčüą║čĆąĄčüąĄąĮčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąøčāčćčłąĄ ą▓čŗčĆčāą▒ą░čéčī čüčĆą░ąĘčā? ąĪą┤ąĄą╗ą░ąĄą╝. ąØą░ 180 ąÆčé čŹč鹊 ąĮąĄ ąĘą░ą╝ąĄčéąĮąŠ ą┐čĆąŠčüč鹊, ą▓ąŠ ą▓čüčÅą║ąŠą╝ čüą╗čāčćą░ąĄ. ąöą░ ąĖ ą┐čĆąĖ čŹč鹊ą╝ č鹊ą║ ą┐čĆąŠčüč鹊 ą▒čāą┤ąĄčé ą╝ąĄą┤ą╗ąĄąĮąĮąŠ čüą┐ą░ą┤ą░čéčī ąČąĄ? ąÆ č鹥ąŠčĆąĖąĖ čÅ čüą╗ą░ą▒ąŠą▓ą░čé.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
DC-AC
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čÄ čćą░čüč鹊čéąĮąĖą║ ą┤ą╗čÅ ąÉąö, ą┐ąŠą┤čüą║ą░ąČąĖč鹥 ą┐ąŠąČą░ą╗čāą╣čüčéą░. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čÅąĮą▓ 11, 2017 18:15:15 |
|
| ąĪąŠą▒čāčéčŗą╗čīąĮąĖą║ ąÜąŠčéą░ |
ąÜą░čĆą╝ą░: 45
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 846
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄąĮ 26, 2014 00:04:37
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2768
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 4
|
ą×čüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčī ą┐ą╗ą░ą▓ąĮčŗą╝ čüąĮąĖąČąĄąĮąĖąĄą╝ čćą░čüč鹊čéčŗ ąĖą╗ąĖ čüą░ą╝ąŠą▓čŗą▒ąĄą│ąŠą╝, ą┐čĆąŠčüč鹊 ą▓čŗą║ą╗čÄčćą░čÅ ą▓čüąĄ ą║ą╗čÄčćąĖ. ąóąŠą║ čüą┐ą░ą┤ą░čéčī ąĮąĄ ą▒čāą┤ąĄčé. ą¤čĆąĄą┤čüčéą░ą▓čīč鹥, ą┐ąŠą╗ąĄ ą▓čĆą░čēą░ąĄčéčüčÅ čü čćą░čüč鹊č鹊ą╣ 50ąōčå, ą░ ą┐ąŠč鹊ą╝ ą▒ą░čå - ąĮčāą╗ąĄą▓čŗąĄ ą▓ąĄą║č鹊čĆą░ ą┐ąŠčłą╗ąĖ. ąöą▓ąĖą│ą░č鹥ą╗čī ąĘą░ą║ąŠčĆą░čćąĖą▓ą░ąĄčéčüčÅ ąĖąĮą▓ąĄčĆč鹊čĆąŠą╝, ą┐ąŠą╗ąĄ ą║ą░ą║-ą▒čŗ čĆąĄąĘą║ąŠ "ąĘą░ą╝ąĖčĆą░ąĄčé", ąĮąŠ ąĮąĄ ąĖčüč湥ąĘą░ąĄčé, ą░ ąĮą░ą╝ą░ą│ąĮąĖč湥ąĮąĮčŗą╣ čĆąŠč鹊čĆ čĆąŠč鹊čĆ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ą▓čĆą░čēąĄąĮąĖąĄ, ą┐ąĄčĆąĄčģąŠą┤ąĖčé čĆąĄąĘą║ąŠ ą▓ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠąĄ čüą║ąŠą╗čīąČąĄąĮąĖąĄ ąĖ ą│ąĄąĮąĄčĆąĖčé...ąæčāą┤ąĄčé čāą┤ą░čĆąĮčŗą╣ č鹊ą║. ąÜąŠą│ą┤ą░ ą┐čĆąŠą▓ąĄčĆčÅą╗ąĖ ąĘą░čēąĖčéčā "ąÆąŠčüčīą╝ąĖą║čĆčāčéą░" ąĮą░ ą║-ąĘ ą╝ąĄąČą┤čā čäą░ąĘą░ą╝ąĖ, ąŠą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ ąĮą░ čĆąĄąĘą║čāčÄ čāą┤ą░čĆąĮčāčÄ ąŠčüčéą░ąĮąŠą▓ą║čā čĆąŠč鹊čĆą░ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ą┐čĆąĖ ą║ąŠčĆąŠčéą║ąŠą╝ ąĘą░ą╝čŗą║ą░ąĮąĖąĖ ą▓čŗą▓ąŠą┤ąŠą▓. ąĢčüą╗ąĖ ą▓ą║ą╗čÄčćąĖčéčī ąĮą░ čģąŠą┤čā ąĮčāą╗ąĄą▓čŗąĄ ą▓ąĄą║č鹊čĆą░, č鹊 čéčĆą░ąĮąĘąĖčüč鹊čĆčŗ ąĖ ą┤ąĖąŠą┤čŗ ąĖąĮą▓ąĄčĆč鹊čĆą░ čüčĆą░ą▒ąŠčéą░čÄčé ą▓ą╝ąĄčüč鹊 ą┐ą╗ąŠčüą║ąŠą│čāą▒čåąĄą▓ 
_________________
ą×ą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ, ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ, čüčģąĄą╝čŗ ąĖ ą┐čĆąŠčłąĖą▓ą║ąĖ ąÆąŠčüčīą╝ąĖą║čĆčāčéą░ - yandex
ą×ą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ, ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ, čüčģąĄą╝čŗ ąĖ ą┐čĆąŠčłąĖą▓ą║ąĖ ąÆąŠčüčīą╝ąĖą║čĆčāčéą░ - google
ąÆąĖą┤ąĄąŠ čĆąŠą╗ąĖą║ąĖ YouTube RuTube ąöąĘąĄąĮ
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Sanchogus
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čÄ čćą░čüč鹊čéąĮąĖą║ ą┤ą╗čÅ ąÉąö, ą┐ąŠą┤čüą║ą░ąČąĖč鹥 ą┐ąŠąČą░ą╗čāą╣čüčéą░. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čÅąĮą▓ 11, 2017 18:38:20 |
|
| ąØą░čłąĄą╗ čéčĆą░ąĮąĘąĖčüč鹊čĆ. ą¤ąŠąĮčÄčģą░ą╗. |
|
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 97
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ąŠą║čé 07, 2015 13:13:40
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 180
ą×čéą║čāą┤ą░: ą£ą×, ą│. ąÆąŠčüą║čĆąĄčüąĄąĮčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
FIXED ąĢčüčéčī ąĮą░ąČą░čéčī ą║ąĮąŠą┐ą║čā ąĪąóąÉąĀąó ą▓ąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ, č鹊 ą©ąśą£ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ STOP (ą©ąśą£ą░ ąĮąĄčé), ą░ čćą░čüč鹊čéą░ ą▒čāą┤ąĄčé čüą▒čĆąŠčłąĄąĮą░. ąĢčüčéčī ąĘą░ąČą░čéčī ą║ąĮąŠą┐ą║čā ąĪąóąÉąĀąó ąĮą░ 1 čüąĄą║ ąĖ ąŠčéą┐čāčüčéąĖčéčī, č鹊 ą┤ą▓ąĖą│ą░č鹥ą╗čī ąĮą░čćąĮąĄčé čāą▒ą░ą▓ą╗čÅčéčī čćą░čüč鹊čéčā ąŠčé č鹥ą║čāčēąĄą╣ ą┤ąŠ ąĮčāą╗čÅ, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ZERO. ąĪą┐ą░čüąĖą▒ąŠ ąĘą░ čüąŠą▓ąĄčé. ąśčüą┐čĆą░ą▓ą╗ąĄąĮąĮą░čÅ ą▓ąĄčĆčüąĖčÅ: https://yadi.sk/d/s0AlM2ig38TTvX
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ma5a97
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čÄ čćą░čüč鹊čéąĮąĖą║ ą┤ą╗čÅ ąÉąö, ą┐ąŠą┤čüą║ą░ąČąĖč鹥 ą┐ąŠąČą░ą╗čāą╣čüčéą░. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ čÅąĮą▓ 21, 2017 13:43:54 |
|
| ą¤čĆąŠčĆąĄąĘą░ą╗ąĖčüčī ąĘčāą▒čŗ |
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 13
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą╝ą░čĆ 12, 2015 01:37:52
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 218
ą×čéą║čāą┤ą░: ąöąŠąĮąĄčåą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
sidor094
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čÄ čćą░čüč鹊čéąĮąĖą║ ą┤ą╗čÅ ąÉąö, ą┐ąŠą┤čüą║ą░ąČąĖč鹥 ą┐ąŠąČą░ą╗čāą╣čüčéą░. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ čÅąĮą▓ 23, 2017 09:55:31 |
|
| ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā! |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĮąŠčÅ 24, 2016 13:52:44
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 22
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
DC-AC ą┐ąĖčüą░ą╗(ą░): ą×čüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčī ą┐ą╗ą░ą▓ąĮčŗą╝ čüąĮąĖąČąĄąĮąĖąĄą╝ čćą░čüč鹊čéčŗ ąĖą╗ąĖ čüą░ą╝ąŠą▓čŗą▒ąĄą│ąŠą╝, ą┐čĆąŠčüč鹊 ą▓čŗą║ą╗čÄčćą░čÅ ą▓čüąĄ ą║ą╗čÄčćąĖ. ąóąŠą║ čüą┐ą░ą┤ą░čéčī ąĮąĄ ą▒čāą┤ąĄčé. ą¤čĆąĄą┤čüčéą░ą▓čīč鹥, ą┐ąŠą╗ąĄ ą▓čĆą░čēą░ąĄčéčüčÅ čü čćą░čüč鹊č鹊ą╣ 50ąōčå, ą░ ą┐ąŠč鹊ą╝ ą▒ą░čå - ąĮčāą╗ąĄą▓čŗąĄ ą▓ąĄą║č鹊čĆą░ ą┐ąŠčłą╗ąĖ. ąöą▓ąĖą│ą░č鹥ą╗čī ąĘą░ą║ąŠčĆą░čćąĖą▓ą░ąĄčéčüčÅ ąĖąĮą▓ąĄčĆč鹊čĆąŠą╝, ą┐ąŠą╗ąĄ ą║ą░ą║-ą▒čŗ čĆąĄąĘą║ąŠ "ąĘą░ą╝ąĖčĆą░ąĄčé", ąĮąŠ ąĮąĄ ąĖčüč湥ąĘą░ąĄčé, ą░ ąĮą░ą╝ą░ą│ąĮąĖč湥ąĮąĮčŗą╣ čĆąŠč鹊čĆ čĆąŠč鹊čĆ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ą▓čĆą░čēąĄąĮąĖąĄ, ą┐ąĄčĆąĄčģąŠą┤ąĖčé čĆąĄąĘą║ąŠ ą▓ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠąĄ čüą║ąŠą╗čīąČąĄąĮąĖąĄ ąĖ ą│ąĄąĮąĄčĆąĖčé...ąæčāą┤ąĄčé čāą┤ą░čĆąĮčŗą╣ č鹊ą║. ąÜąŠą│ą┤ą░ ą┐čĆąŠą▓ąĄčĆčÅą╗ąĖ ąĘą░čēąĖčéčā "ąÆąŠčüčīą╝ąĖą║čĆčāčéą░" ąĮą░ ą║-ąĘ ą╝ąĄąČą┤čā čäą░ąĘą░ą╝ąĖ, ąŠą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ ąĮą░ čĆąĄąĘą║čāčÄ čāą┤ą░čĆąĮčāčÄ ąŠčüčéą░ąĮąŠą▓ą║čā čĆąŠč鹊čĆą░ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ą┐čĆąĖ ą║ąŠčĆąŠčéą║ąŠą╝ ąĘą░ą╝čŗą║ą░ąĮąĖąĖ ą▓čŗą▓ąŠą┤ąŠą▓. ąĢčüą╗ąĖ ą▓ą║ą╗čÄčćąĖčéčī ąĮą░ čģąŠą┤čā ąĮčāą╗ąĄą▓čŗąĄ ą▓ąĄą║č鹊čĆą░, č鹊 čéčĆą░ąĮąĘąĖčüč鹊čĆčŗ ąĖ ą┤ąĖąŠą┤čŗ ąĖąĮą▓ąĄčĆč鹊čĆą░ čüčĆą░ą▒ąŠčéą░čÄčé ą▓ą╝ąĄčüč鹊 ą┐ą╗ąŠčüą║ąŠą│čāą▒čåąĄą▓ ą×čé čéą░ą║ąĖčģ ą▓ąĄčēąĄą╣ čüą┐ą░čüą░ąĄčé čāčüčéą░ąĮąŠą▓ą║ą░ 菹Įą║ąŠą┤ąĄčĆą░.ąöą╗čÅ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠą│ąŠ (ąØą░ąĖą▒ąŠą╗ąĄąĄ ą▒čŗčüčéčĆąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖą╗ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ)ąØąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčī ą▓čĆą░čēąĄąĮąĖąĄ ą┐ąŠą╗čÅ ąŠčéą╗ąĖčćąĮčŗą╝ ąŠčé ą▓čĆą░čēąĄąĮąĖčÅ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ąĮą░ čćą░čüč鹊čéčā čüą║ąŠą╗čīąČąĄąĮąĖčÅ.ąĢčüą╗ąĖ čćą░čüč鹊čéą░ ą┐ąŠą╗čÅ ą▒čāą┤ąĄčé ąŠčéą╗ąĖčćą░čéčīčüčÅ ąĮą░ ą▒ąŠą╗čīčłčāčÄ ą▓ąĄą╗ąĖčćąĖąĮčā,č鹊 č鹊ą║ąĖ ą▓ąŠąĘčĆą░čüčéčāčé ą░ ą╝ąŠą╝ąĄąĮčé ąĮąĄ čāą▓ąĄą╗ąĖčćąĖčéčüčÅ,ą░ ą┤ą░ąČąĄ ąĮąĄą╝ąĮąŠą│ąŠ čāą╝ąĄąĮčīčłąĖčéčüčÅ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ma5a97
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čÄ čćą░čüč鹊čéąĮąĖą║ ą┤ą╗čÅ ąÉąö, ą┐ąŠą┤čüą║ą░ąČąĖč鹥 ą┐ąŠąČą░ą╗čāą╣čüčéą░. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čÅąĮą▓ 25, 2017 18:26:41 |
|
| ą¤čĆąŠčĆąĄąĘą░ą╗ąĖčüčī ąĘčāą▒čŗ |
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 13
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą╝ą░čĆ 12, 2015 01:37:52
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 218
ą×čéą║čāą┤ą░: ąöąŠąĮąĄčåą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
sidor094 ą┐ąĖčüą░ą╗(ą░): ą×čé čéą░ą║ąĖčģ ą▓ąĄčēąĄą╣ čüą┐ą░čüą░ąĄčé čāčüčéą░ąĮąŠą▓ą║ą░ 菹Įą║ąŠą┤ąĄčĆą░ . ąöą╗čÅ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠą│ąŠ (ąØą░ąĖą▒ąŠą╗ąĄąĄ ą▒čŗčüčéčĆąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖą╗ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ). ą£čŗ ą┐ąŠą╣ą┤ąĄą╝ ą│ąŠčĆą░ąĘą┤ąŠ ą┤ą░ą╗čīčłąĄ , ąĄčüą╗ąĖ ą▒čāą┤ąĄą╝ ą▓ąĖą┤ąĄčéčī ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ąĢčüą╗ąĖ ą║ąŠą┤ ą┐ąŠą┤ STM , č鹊 čā ą╝ąĄąĮčÅ ąĮąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ čćč鹊-č鹊 ą┐čĆąŠą▓ąĄčĆčÅčéčī ą▓ ąČąĄą╗ąĄąĘąĄ  ąĪąĄą╣čćą░čü ą┐čŗčéą░čÄčüčī ą┐ąŠą▒ąŠčĆąŠčéčī attiny861 ąÜą░ą║ąĖąĄ ą┐ąŠą╗ąĄąĘąĮčŗąĄ čäčāąĮą║čåąĖąĖ čéčāą┤ą░ ąĮčāąČąĮąŠ ą▓ąĮąĄą┤čĆąĖčéčī ???
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
sidor094
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čÄ čćą░čüč鹊čéąĮąĖą║ ą┤ą╗čÅ ąÉąö, ą┐ąŠą┤čüą║ą░ąČąĖč鹥 ą┐ąŠąČą░ą╗čāą╣čüčéą░. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čÅąĮą▓ 25, 2017 21:51:07 |
|
| ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā! |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĮąŠčÅ 24, 2016 13:52:44
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 22
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąÜąŠą┤ ąĮą░ STM32.Atmega ąĮą░ą▓čĆčÅą┤ą╗ąĖ ą┐ąŠčéčÅąĮąĄčé.ąöąĄą╗ąŠ čéčāčé ąĮąĄ čüč鹊ą╗čīą║ąŠ ą▓ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ,ąĮąŠ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ ą▓ ąŠčéčüčāčéčüčéą▓ąĖąĖ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ 菹Įą║ąŠą┤ąĄčĆą░. ąÉ ą║ąŠą┤ ą┤ąŠčüčéą░č鹊čćąĮąŠ ą┐čĆąŠčüč鹊ą╣ ąĮą░ą┤ąŠ ą┐čĆąŠčüč鹊 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī čüą║ąŠą╗čīąČąĄąĮąĖąĄ ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮąŠ ąŠčéčüčéą░ą▓ą░ąĮąĖčÄ ąĖą╗ąĖ ąŠą┐ąĄčĆąĄąČąĄąĮąĖčÄ ąŠčé ąČąĄą╗ą░ąĄą╝ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą┐čĆąĖ čŹč鹊ą╝ ąĮą░ą┤ąŠ čüąŠčģčĆą░ąĮčÅčéčī čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ U/F,ąĖ ą┐čĆąĖ čŹč鹊ą╝ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┐čĆąĄą▓čŗčłą░čéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ čüą║ąŠą╗čīąČąĄąĮąĖčÅ(ąŠą│čĆą░ąĮąĖčćąĖą▓ą░čéčī ). ąÆąŠčé ą╝ąŠą╣ ą┐čĆąĖą▓ąŠą┤. https://youtu.be/sKJRzdLFmIA
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
sidor094
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čÄ čćą░čüč鹊čéąĮąĖą║ ą┤ą╗čÅ ąÉąö, ą┐ąŠą┤čüą║ą░ąČąĖč鹥 ą┐ąŠąČą░ą╗čāą╣čüčéą░. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé čÅąĮą▓ 27, 2017 08:08:54 |
|
| ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā! |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĮąŠčÅ 24, 2016 13:52:44
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 22
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ma5a97 ą▓ąĖą┤ąĄą╗ ą▓ą░čłąĄ ą▓ąĖą┤ąĄąŠ.ąĢčüčéčī ą▓ąŠą┐čĆąŠčü ą┐ąŠ čüčģąĄą╝ąĄ.ąØąĄ ąŠč湥ąĮčī ą┐ąŠąĮčÅčéąĮąŠ .ąÜą░ą║ ą▓čŗ ą╝ąĄčĆčÅąĄč鹥 ą┐ąŠčüč鹊čÅąĮąĮčŗą╣ č鹊ą║ čü ą┐ąŠą╝ąŠčēčīčÄ č鹊ą║ąŠą▓čŗčģ čéčĆą░ąĮčüč乊čĆą╝ą░č鹊čĆąŠą▓?ąÆ ą┐čĆąĖą▓ąŠą┤ąĄ "ąĀą░ąĘą╝ąĄčĆ 2ą╝" č鹊ąČąĄ ąĖąĘą╝ąĄčĆčÅčÄčé č鹊ą║ čéčĆą░ąĮčüč乊čĆą╝ą░č鹊čĆąŠą╝.ąØąŠ čéą░ą╝ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĮą░čüčŗčēąĄąĮąĖąĄ.ąØą░ ą▓čŗčģąŠą┤ ą┐ąŠą┤ą░ąĄčéčüčÅ ą╝ąĄą░ąĮą┤čĆ,ąĖ ą╝ąĄčĆčÅąĄčéčüčÅ č鹊ą║ ą│ąĄąĮąĄčĆą░č鹊čĆą░.ąÆąŠąŠą▒čēąĄ ąĮą░ STM32 ąŚąĮą░čćąĖč鹥ą╗čīąĮąŠ čāą┤ąŠą▒ąĮąĄąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ.ą» ą┐ąŠąĮąĖą╝ą░čÄ ,čćč鹊 ą╗čÄą┤ąĄą╣ čüą╝čāčēą░ąĄčé ą┐ąĄčĆąĄčģąŠą┤ čü čģąŠčĆąŠčłąŠ ąĘąĮą░ą║ąŠą╝čŗčģ ą┐ą╗ą░čéč乊čĆą╝,ąĮąŠ čŹč鹊 ą▓čüčæ čĆą░ą▓ąĮąŠ ą┐čĆąĖą┤čæčéčüčÅ ą┤ąĄą╗ą░čéčī ,ąĄčüą╗ąĖ čåąĄą╗čī čüą╗ąŠąČąĮąĄąĄ č湥ą╝ ą╝ąŠčĆą│ą░ąĮąĖąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ą╝ąĖ.ąóąĄą╝ ą▒ąŠą╗ąĄąĄ ,čćč鹊 ą┐čĆąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĖ ąĮą░ čÅąĘčŗą║ą░čģ ą▓čŗčüąŠą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ą┐ąĄčĆąĄčģąŠą┤ ąĘą░ą║ą╗čÄčćą░ąĄčéčüčÅ ą╗ąĖčłčī ą▓ ąĖąĘčāč湥ąĮąĖąĖ ą┐ąĄčĆąĖč乥čĆąĖąĖ.ąöą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐ąĄčĆąĖč乥čĆąĖąĖ ąĮą░ stm čüčāčēąĄčüčéą▓čāąĄčé ą▓ąĖąĘčāą░ą╗čīąĮą░čÅ čüčĆąĄą┤ą░ CubeMx ą│ą┤ąĄ ąĮą░čüčéčĆąŠą╣ą║ą░ čüą▓ąŠą┤ąĖčéčüčÅ ą║ čāą║ą░ąĘą░ąĮąĖčÄ ą╝čŗčłą║ąŠą╣ ąĮąŠą│ąĖ ąĖ ąĘą░ą┤ą░ąĮąĖčÄ ąČąĄą╗ą░ąĄą╝ąŠą╣ čäčāąĮą║čåąĖąĖ.ąŻ ą▓ą░čü ąĮą░ ą┐ą╗ą░č鹥 ąĮąĄčüą║ąŠą╗čīą║ąŠ ą╝ąĖą║čĆąŠčüčģąĄą╝ čüą╗čāąČą░čé ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą╝ąĄčĆčéą▓ąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ąĖąĮą▓ąĄčĆčüąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ ,ą░ čéą░ą║-ąČąĄ ą░ą▓ą░čĆąĖą╣ąĮąŠą│ąŠ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ ąöą╗čÅ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣ čā stm32 čéčĆąĄčģčäą░ąĘąĮčŗą╣ čłąĖą╝ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čü ąĘą░ą┤ą░ąĮąĖąĄą╝ ą╝ąĄčĆčéą▓ąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąĖąĮą▓ąĄčĆčüąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓,ą¦č鹊 čüąŠą║čĆą░čéąĖčé čćąĖčüą╗ąŠ ą╝ąĖą║čĆąŠčüčģąĄą╝ ąĮą░ ą┐ą╗ą░č鹥.ąóą░ą║ ąČąĄ ąĄčüčéčī ąĮąŠą│ą░ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ ą©ąśą£ą░ .ąØą░ ąĮąĄčæ ą┤ąŠčüčéą░č鹊čćąĮąŠ ą┐ąŠą┤ą░čéčī čüąĖą│ąĮą░ą╗ ąĘą░čēąĖčéčŗ ąĖ ąĮąĄ ąĮą░ą┤ąŠ ąĮąĖą║ą░ą║ ą┐čĆąĖ čŹč鹊ą╝ čüą╗ąĄą┤ąĖčéčī ąĘą░ ąĮąĄą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ.ą×ąĮą░ čüą░ą╝ą░ ąŠčéą║ą╗čÄčćąĖčé čłąĖą╝.ąØčā ąĖ ąŠą│čĆąŠą╝ąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéą░ą╣ą╝ąĄčĆąŠą▓ ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą║ą░ą║ ą▓čģąŠą┤ą░ 菹Įą║ąŠą┤ąĄčĆą░.ąØąĄ ą│ąŠą▓ąŠčĆčÅ ąŠ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ma5a97
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čÄ čćą░čüč鹊čéąĮąĖą║ ą┤ą╗čÅ ąÉąö, ą┐ąŠą┤čüą║ą░ąČąĖč鹥 ą┐ąŠąČą░ą╗čāą╣čüčéą░. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé čÅąĮą▓ 27, 2017 10:02:48 |
|
| ą¤čĆąŠčĆąĄąĘą░ą╗ąĖčüčī ąĘčāą▒čŗ |
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 13
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą╝ą░čĆ 12, 2015 01:37:52
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 218
ą×čéą║čāą┤ą░: ąöąŠąĮąĄčåą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąóčĆą░ąĮčüč乊čĆą╝ą░č鹊čĆčŗ ą╝ąĄčĆčÅčÄčé ąĮąĄ ą┐ąŠčüč鹊čÅąĮą║čā , ą░ ąĮąĄčüčāčēčāčÄ čłąĖą╝ (č湥ą╝ ą▒ąŠą╗čīčłąĄ č鹊ą║ , č鹥ą╝ čüąĖą╗čīąĮąĄą╣ ą┐čĆąŠąĮąĖą║ą░ąĄčé ąĖ čłąĖą╝), ą║ąŠą╗ąĄčćą║ąĖ ą▓ąĄą┤čī ąŠą┤ąĄčéčŗ ąĮą░ ą║ą░ąČą┤ąŠą╣ čäą░ąĘąĄ , ą░ ąĮąĄ ąĮą░ DC čåąĄą┐ąĖ. ąĢčüą╗ąĖ čüąĖą╗čīąĮąŠ čģąŠč湥čéčüčÅ ,č鹊 ą╝ąŠąČąĮąŠ ą╝ąĄčĆąĖčéčī ąĖ ą┐ąŠčüč鹊čÅąĮą║čā čü ą┐ąŠą╝ąŠčēčīčÄ čéčĆą░ąĮčüč乊čĆą╝ą░č鹊čĆą░ ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ č鹊ą║ą░ (ą╝ą░ą│ąĮąĖčéąĮąŠą│ąŠ čāčüąĖą╗ąĖč鹥ą╗čÅ ) . ąÜą░ą║ ąŠčéą╗ą░ą┤ą║čā STM ą┤ąĄą╗ą░čéčī ? ąØą░čüą║ąŠą╗čīą║ąŠ ą╝ąĮąĄ ąĖąĘą▓ąĄčüčéąĮąŠ čüąĖą╝čāą╗čÅč鹊čĆą░ čéąĖą┐ą░ ą┐čĆąŠč鹥čāčüą░ ą┤ą╗čÅ čŹčéąĖčģ ą╝ąĖą║čĆąŠčüčģąĄą╝ ąĮąĄčé , ą┤ą░ ąĖ ąĮąĄ ą┐čĆąĖą┤čāą╝čŗą▓ą░ąĄčéčüčÅ ą╝ąĮąĄ ą│ą┤ąĄ ą╝ąŠąČąĄčé ą┐čĆąĖą│ąŠą┤ąĖčéčīčüčÅ ą┤ą▓ąĖą│ą░č鹥ą╗čī čü 菹Įą║ąŠą┤ąĄčĆąŠą╝ ??? ąØą░ čåąĖčĆą║čāą╗čÅčĆą║ąĄ ąĖą╗ąĖ ą┤čĆąŠą▓ąŠą║ąŠą╗ąĄ , čćą┐čā čüčéą░ąĮą║čā čā ą╝ąĄąĮčÅ ąĮąĄčéčā. ą¤ąĄčĆąĄčģąŠą┤ąĖčéčī ąĮą░ ą╝ąŠčēąĮčŗąĄ ą║ą░ą╝ąĮąĖ ą▒čāą┤čā , ąĮąŠ ą┐ąŠą║ą░ ąĮąĄčé ą╗ąĖčłąĮąĖčģ ą┤ąĄąĮąĄą│.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
sidor094
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čÄ čćą░čüč鹊čéąĮąĖą║ ą┤ą╗čÅ ąÉąö, ą┐ąŠą┤čüą║ą░ąČąĖč鹥 ą┐ąŠąČą░ą╗čāą╣čüčéą░. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé čÅąĮą▓ 27, 2017 17:34:27 |
|
| ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā! |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĮąŠčÅ 24, 2016 13:52:44
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 22
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą¤ąŠąĮčÅčéąĮąŠ ,čćč鹊 ą┐čĆąŠąĮąĖą║ąĮąŠą▓ąĄąĮąĖąĄ ą©ąśą£ ą╝ąĄąĮčÅąĄčéčüčÅ ąŠčé č鹊ą║ą░ čüčéą░č鹊čĆą░.ąØąŠ čéčāčé čüą║ąŠčĆąĄąĄ ą╝ąŠąČąĮąŠ ą│ąŠą▓ąŠčĆąĖčéčī ąŠ ą║ą░č湥čüčéą▓ąĄąĮąĮąŠą╝ ąĖąĘą╝ąĄčĆąĄąĮąĖąĖ ,ą░ ąĮąĄ ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ąĄąĮąĮąŠą╝.ą¦č鹊 ąĮą░ą┐čĆąĖą╝ąĄčĆ ą▒čāą┤ąĄčé ą┐čĆąĖ ą▓ąĄą║č鹊čĆąĮąŠą╝ čłąĖą╝ąĄ,ą║ąŠą│ą┤ą░ ąŠą┤ąĮą░ čäą░ąĘą░ ą▓ąŠąŠą▒čēąĄ ąĮąĄ čłąĖą╝ąĖčéčüčÅ.ąÉ ą┤čĆčāą│ąĖąĄ ą┤ą▓ąĄ ą▒čāą┤čāčé ąĘą░ą▓ąĖčüąĄčéčī ąŠčé ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ ą©ąśą£ą░ ą░ ąĮąĄ č鹊ą╗čīą║ąŠ ąŠčé č鹊ą║ą░ čüčéą░č鹊čĆą░.ąźąŠčéčÅ ąĄčüą╗ąĖ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąĘą░čēąĖčéčŗ č鹊 ąĮą░ą▓ąĄčĆąĮąŠąĄ ą┐ąŠą╣ą┤ąĄčé.ą¤čĆąŠ ą╝ą░ą│ąĮąĖčéąĮčŗąĄ čāčüąĖą╗ąĖč鹥ą╗ąĖ čÅ ąĖ ą│ąŠą▓ąŠčĆąĖą╗ .ąÆ ą┐čĆąĖą▓ąŠą┤ą░čģ "ąĀą░ąĘą╝ąĄčĆ2ą╝" ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čéą░ą║ąŠą╣ ąČąĄ ą┐čĆąĖąĮčåąĖą┐.ąó.ąĄ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ąŠčé ąĮą░čüčŗčēąĄąĮąĖčÅ čéčĆą░ąĮčüč乊čĆą╝ą░č鹊čĆą░ .ą¦č鹊 ą║ą░čüą░ąĄčéčüčÅ ąŠčéą╗ą░ą┤ą║ąĖ č鹊 ąĄčæ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖ čü STM .ąÜčüčéą░čéąĖ ą┐ąŠ-ą╝ąŠąĄą╝čā STM32f103 ąĄčüčéčī ąĖ ą▓ ą┐čĆąŠč鹥čāčüąĄ,čģąŠčéčÅ ą╝ąŠąČąĮąŠ ąĖ č湥čĆąĄąĘ JTAG.ą» ą║ą░ą║ č鹊 ą▓ąŠąŠą▒čēąĄ ąŠčéą╗ą░ą┤čćąĖą║ąŠą╝ ąĮąĄ ą┐ąŠą╗čīąĘčāčÄčüčī.ą¦č鹊 ą║ą░čüą░ąĄčéčüčÅ čŹąĮą║ąŠą┤ąĄčĆą░ ,č鹊 ą║čĆąŠą╝ąĄ č鹊čćąĮąŠą│ąŠ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ąĮąŠčĆą╝ą░ą╗čīąĮčŗą╣ ą┐čāčüą║ąŠą▓ąŠą╣ ą╝ąŠą╝ąĄąĮčé(čĆą░ąĘą│ąŠąĮąĮčāčÄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║čā) ąĖ ą▓čŗčüąŠą║ąĖą╣ ą╝ąŠą╝ąĄąĮčé ą┐čĆąĖ ą┤ą▓ąĖąČąĄąĮąĖąĖ čü ąŠč湥ąĮčī ąĮąĖąĘą║ąĖą╝ąĖ čüą║ąŠčĆąŠčüčéčÅą╝ąĖ.ąó. ąĄ. ąĘąĮą░ąĮąĖąĄ ąŠ čĆąĄą░ą╗čīąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą▓čĆą░čēąĄąĮąĖčÅ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čāą╗čāčćčłąĖčéčī čéčÅą│ąŠą▓čŗąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ąĖ ąĖąĘą▒ąĄą│ą░čéčī ąĘą░ą┐čĆąĄą┤ąĄą╗čīąĮąŠą│ąŠ čüą║ąŠą╗čīąČąĄąĮąĖčÅ.ąóą░ą║ ąČąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╗čāčćąĖčéčī čģąŠčĆąŠčłčāčÄ čüčéą░ą▒ąĖą╗ąĖąĘą░čåąĖčÄ čüą║ąŠčĆąŠčüčéąĖ ą▓ąĮąĄ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĮą░ą│čĆčāąĘą║ąĖ.ąØąŠ ą║ąŠąĮąĄčćąĮąŠ ą┤ą╗čÅ čåąĖčĆą║čāą╗čÅčĆą║ąĖ čŹč鹊 ąĮąĄ čüč鹊ą╗čī ą░ą║čéčāą░ą╗čīąĮąŠ.ą» ą┐ąĄčĆąĄčłąĄą╗ ąĮą░ ARM ąĘą░č鹥ą╝ ąĮą░ CORTEX čāąČąĄ ąŠą║ąŠą╗ąŠ čüąĄą╝ąĖ ą╗ąĄčé ąĮą░ąĘą░ą┤ .ąĖ čü č鹥čģ ą┐ąŠčĆ ą┤ą░ąČąĄ ą┐čĆąŠčüč鹥ą╣čłąĖąĄ ą▓ąĄčēąĖ ą┤ąĄą╗ą░čÄ ąĮą░ ąĮąĖčģ (ą▓ąŠąŠą▒čēąĄ ąĘą░ą▒čŗą╗ ąŠčé ąÉąóą£ąĢąōąĢ).ąÜčüčéą░čéąĖ ąĮą░ ą░ą╗ąĖ 菹║čüą┐čĆąĄčüčüąĄ ą┐ą╗ą░čéčā čü stm32f103 ą╝ąŠąČąĮąŠ ą║čāą┐ąĖčéčī ąĘą░ 100čĆčāą▒. https://ru.aliexpress.com/item/1pcs-STM ... f6978e946d
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ma5a97
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čÄ čćą░čüč鹊čéąĮąĖą║ ą┤ą╗čÅ ąÉąö, ą┐ąŠą┤čüą║ą░ąČąĖč鹥 ą┐ąŠąČą░ą╗čāą╣čüčéą░. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé čÅąĮą▓ 27, 2017 19:58:22 |
|
| ą¤čĆąŠčĆąĄąĘą░ą╗ąĖčüčī ąĘčāą▒čŗ |
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 13
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą╝ą░čĆ 12, 2015 01:37:52
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 218
ą×čéą║čāą┤ą░: ąöąŠąĮąĄčåą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąŠčüčī 3 čéčĆą░ąĮčüč乊čĆą╝ą░č鹊čĆą░ č鹊ą║ą░ ąĖ čüąĖą│ąĮą░ą╗ čüčćąĖčéčŗą▓ą░ą╗čüčÅ č湥čĆąĄąĘ 3 ą┤ąĖąŠą┤ąĮčŗčģ ą╝ąŠčüčéą░ , ą▓čŗčģąŠą┤čŗ ą╝ąŠčüč鹊ą▓ ą┐ąŠą┤ą║ą╗čÄčćą░ą╗ąĖčüčī ąĮą░ ą║ąŠą╝ą┐ą░čĆą░č鹊čĆ. ąØą░čüč湥čé č鹊čćąĮąŠčüčéąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čÅ ąĮąĄ ąĘąĮą░čÄ , ą╝ąĮąĄ ą▒čŗą╗ą░ ąĮčāąČąĮą░ ą▒čŗčüčéčĆą░čÅ ąĖ ąĮąĄ ą▓čŗą┤ąĄą╗čÅčÄčēą░čÅ č鹥ą┐ą╗ą░ ąĘą░čēąĖčéą░ . ąóčāčé čģąŠčéčī ą║ą░ą║ąŠą╣ ą┤ą░čéčćąĖą║ ąĮąĄ čüčéą░ą▓čī ąĮą░ ą▓čŗčģąŠą┤ąĄ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ čĆą▓ą░ąĮąĖąĮą░ , ąŠčüčéą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ čāčüčĆąĄą┤ąĮčÅčéčī čüąĖą│ąĮą░ą╗. ą¦č鹊 ą║ą░čüą░ąĄčéčüčÅ čŹąĮą║ąŠą┤ąĄčĆą░ , č鹊 ąŠąĮ čüč鹊ąĖčé ą║ą░ą║ ą▓ąĄčüčī čćą░čüč鹊čéąĮąĖą║  , ą░ ą▓čŗčüąŠą║ąĖą╣ ą╝ąŠą╝ąĄąĮčé ąĮą░ ąĮąĖąĘą║ąĖčģ ąŠą▒ąŠčĆąŠčéą░čģ čÅ ą╝ąŠą│čā ą┐ąŠą╗čāčćąĖčéčī čü ą┐ąŠą╝ąŠčēčīčÄ čéą░čģąŠą╝ąĄčéčĆą░ (ą▓čŗą║ą╗ą░ą┤čŗą▓ą░ą╗ č湥čĆąĮąŠą▓čāčÄ ą▓ąĄčĆčüąĖčÄ ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ čĆą░ąĮčīčłąĄ).
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
sidor094
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čÄ čćą░čüč鹊čéąĮąĖą║ ą┤ą╗čÅ ąÉąö, ą┐ąŠą┤čüą║ą░ąČąĖč鹥 ą┐ąŠąČą░ą╗čāą╣čüčéą░. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé čÅąĮą▓ 27, 2017 20:10:54 |
|
| ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā! |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĮąŠčÅ 24, 2016 13:52:44
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 22
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą» ąĖčüą┐ąŠą╗čīąĘčāčÄ čéą░ą║ąŠą╣ https://ru.aliexpress.com/item/High-Qua ... d25e6f70e4ąĢčüą╗ąĖ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ č鹊 čéą░čģąŠą╝ąĄčéčĆ ąĮąĖč湥ą╝ ąĮąĄ čģčāąČąĄ 菹Įą║ąŠą┤ąĄčĆą░.ąØąŠ ą┐ąŠ-ą╝ąŠąĄą╝čā 500-600 čĆčāą▒ čåąĄąĮą░ ąĘą░ 菹Įą║ąŠą┤ąĄčĆ ąĮąĄą▒ąŠą╗čīčłą░čÅ ,ą┐ą╗čÄčü ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī č鹊čćąĮąŠą│ąŠ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ.ą£ąĄąĮčÅ čéčĆą░ąĮčüč乊čĆą╝ą░č鹊čĆ č鹊ą║ą░ ąĖąĮč鹥čĆąĄčüčāąĄčé ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ č鹊ą║ąŠą▓ąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ.ąÜčüčéą░čéąĖ ą▓ąŠą┐čĆąŠčü .ąöą╗čÅ č湥ą│ąŠ čüčĆąĄą┤ąĮčÅčÅ č鹊čćą║ą░?ąöą╗čÅ ąĘą░čēąĖčéčŗ ąŠčé čüą║ą▓ąŠąĘąĮąŠą│ąŠ č鹊ą║ą░?ąÆąĄą┤čī ą┤ą╗čÅ ąĘą░čēąĖčéčŗ ąŠčé čäą░ąĘąĮąŠą│ąŠ č鹊ą║ą░ ą┤ąŠčüčéą░č鹊čćąĮąŠ ą▓ą║ą╗čÄčćąĖčéčī čéčĆą░ąĮčüč乊čĆą╝ą░č鹊čĆ ą▓ čäą░ąĘčā.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
|
ąĪčéčĆą░ąĮąĖčåą░ 15 ąĖąĘ 36
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 712 ] |
... , , , , , , ... |
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ |
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: ąĮąĄčé ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ ąĖ ą│ąŠčüčéąĖ: 56 |
|
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ
|

|
|










