ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░čÅą╗čīąĮąĖą║ą░ Hakko FM-2028 čü 菹Įą║ąŠą┤ąĄčĆąŠą╝
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
ąĪčéčĆą░ąĮąĖčåą░ 1 ąĖąĘ 125
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2494 ]
, , , , ...
ąÉą▓č鹊čĆ
ąĪąŠąŠą▒čēąĄąĮąĖąĄ
BV-Dial
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░čÅą╗čīąĮąĖą║ą░ Hakko FM-2028 čü 菹Įą║ąŠą┤ąĄčĆąŠą╝
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą╝ą░čĆ 18, 2014 15:15:12
ą×ą┐čŗčéąĮčŗą╣ ą║ąŠčé
ąÜą░čĆą╝ą░: 19
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 211
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą┤ąĄą║ 09, 2008 13:41:05ąĪąŠąŠą▒čēąĄąĮąĖą╣: 737ą×čéą║čāą┤ą░: ą¦ąĄčĆąĄą┐ąŠą▓ąĄčå.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 5
ąØą░ ąĮą░čłąĄą╝ čüą░ą╣č鹥 čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮčŗ 6(čłąĄčüčéčī) ą┐čĆąĄą▓ąŠčüčģąŠą┤ąĮčŗčģ ą┐ą░čÅą╗čīąĮčŗčģ čüčéą░ąĮčåąĖą╣.ąĪą░ą╝ čüąŠą▒čĆą░ą╗ 3 čĆą░ąĘąĮčŗčģ - ą▓čüąĄ ą┐čĆąĄą║čĆą░čüąĮąŠ čĆą░ą▒ąŠčéą░čÄčé.ąÆčüąĄ 6 čüčéą░ąĮčåąĖą╣ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą┐ą░čÅą╗čīąĮąĖą║ Hakko-907 ąĖą╗ąĖ ąĄą│ąŠ ą║ąĖčéą░ą╣čüą║ąĖąĄ ą║ąŠą┐ąĖąĖ,čü ąĄą│ąŠ ą┤ąŠčüč鹊ąĖąĮčüčéą▓ą░ą╝ąĖ (ą╝ą░ą╗ą░čÅ čüč鹊ąĖą╝ąŠčüčéčī,ą▒ąŠą╗čīčłąŠą╣ ą▓čŗą▒ąŠčĆ ąČą░ą╗,ą┤ąŠčüčéčāą┐ąĮąŠčüčéčī) ąĖ ąĮąĄą┤ąŠčüčéą░čéą║ą░ą╝ąĖ (ą▓čüąĄ ą┐čĆąŠ ąĮąĖčģ ąĘąĮą░čÄčé). ąöą░ą▓ąĮąŠ ą▒čŗą╗ą░ ą╝ąĄčćčéą░ ą┐čĆąĖčüą┐ąŠčüąŠą▒ąĖčéčī ą┐ą░čÅą╗čīąĮąĖą║ čü ą╝ąŠąĮąŠą╗ąĖčéąĮčŗą╝ ąČą░ą╗ąŠą╝,ą│ą┤ąĄ ąĮą░ą│čĆąĄą▓ą░č鹥ą╗čī ąĖ ąČą░ą╗ąŠ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ąŠą┤ąĮąŠą╝ ą║ąŠčĆą┐čāčüąĄ.ą¦ąĖčéą░čÅ ą▓ąĄčéą║čā č乊čĆčāą╝ą░ (ą”ąĖčäčĆąŠą▓ą░čÅ ą┐ą░čÅą╗čīąĮą░čÅ čüčéą░ąĮčåąĖčÅ čüą▓ąŠąĖą╝ąĖ čĆčāą║ą░ą╝ąĖ.(V 2.0)) ąŠą▒ąĮą░čĆčāąČąĖą╗ čćč鹊 Victor_P. ą▓ ą┐čĆąŠčłąĖą▓ą║ąĄ 1.4 čüą┤ąĄą╗ą░ą╗ ąĘą░ą╝ąĄčĆčŗ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ą▓ ą┐ą░čāąĘą░čģ ąĮą░ą│čĆąĄą▓ą░. ąóąŠ čćč鹊 ąĮą░ą┤ąŠ.
ąÆą╗ąŠąČąĄąĮąĖčÅ:
ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ ą║ čäą░ą╣ą╗čā: Foto 3
IMG_03.jpg [155.63 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 32963
ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ ą║ čäą░ą╣ą╗čā: Foto 2
IMG_02.jpg [224.88 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 24272
ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ ą║ čäą░ą╣ą╗čā: Foto 1
IMG_01.jpg [171.67 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 19547
ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ ą║ čäą░ą╣ą╗čā: ą¤ą¤
FM2028_PCB.rar [46.58 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 13360
ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ ą║ čäą░ą╣ą╗čā: ąĪčģąĄą╝ą░
FM-2028.pdf [120.65 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 20335
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
ą£čāčĆą║ąŠčé
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░čÅą╗čīąĮąĖą║ą░ Hakko FM-2028 čü 菹Įą║ąŠą┤ąĄčĆąŠą╝
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ą╝ą░čĆ 21, 2014 22:42:56
ąÆčüčéą░ą╗ ąĮą░ ą╗ą░ą┐čŗ
ąÜą░čĆą╝ą░: 1
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 13
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü čüąĄąĮ 25, 2011 19:30:07ąĪąŠąŠą▒čēąĄąĮąĖą╣: 95ą×čéą║čāą┤ą░: ąöąŠąĮąĄčåą║.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąĪčéčĆą░ąĮąĮąŠ, ąĮąĄčāąČąĄą╗ąĖ ąĮąĖą║ąŠą╝čā ąĮąĄąĖąĮč鹥čĆąĄčüąĮą░ čŹčéą░ č鹥ą╝ą░...
ąÆąĄą┤čī ą▓ąĄčēčī-č鹊 ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠ čüč鹊čÅčēą░čÅ.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
kuchar
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░čÅą╗čīąĮąĖą║ą░ Hakko FM-2028 čü 菹Įą║ąŠą┤ąĄčĆąŠą╝
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą╝ą░čĆ 23, 2014 23:24:49
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą░ą┐čĆ 10, 2011 08:17:13ąĪąŠąŠą▒čēąĄąĮąĖą╣: 87
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąØą░ą▓ąĄčĆąĮąŠąĄ ą▓čüąĄ ąŠą▒ąĖčéą░čÄčé ą▓ ąŠčüąĮąŠą▓ąĮąŠą╣ č鹥ą╝ąĄ...
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
Panda_Y2K
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░čÅą╗čīąĮąĖą║ą░ Hakko FM-2028 čü 菹Įą║ąŠą┤ąĄčĆąŠą╝
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą╝ą░čĆ 23, 2014 23:49:00
ąōčĆčŗąĘąĄčé ą║ą░ąĮąĖč乊ą╗čī
ąÜą░čĆą╝ą░: 6
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 9
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé čüąĄąĮ 23, 2011 06:44:41ąĪąŠąŠą▒čēąĄąĮąĖą╣: 258ą×čéą║čāą┤ą░: ą«ążą×
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąöą░, č鹥ą╝ą░ ąĖąĮč鹥čĆąĄčüąĮą░čÅ, čā ą╝ąĄąĮčÅ ą┐ą░čÅą╗čīąĮąĖą║ Goot, ą┤čāą╝ą░čÄ čéą░ą╝ č鹊ąČąĄ, čćč鹊 č鹊 ą┐ąŠčģąŠąČąĄąĄ ą╝ąŠąČąĮąŠ čüą┤ąĄą╗ą░čéčī.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
ą×čĆą│ą░ąĮąĖąĘą░čåąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąĮą░ą┤ąĄąČąĮčŗčģ ą╗ąĖčéąĖąĄą▓čŗčģ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓ EVE ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ ą░ąĘąĖą░čéčüą║ąŠą│ąŠ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░
ąÜą░č湥čüčéą▓ąĄąĮąĮąŠąĄ ąĖ ą▒ąĄąĘąŠą┐ą░čüąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, čĆą░ą▒ąŠčéą░čÄčēąĄąĄ ąŠčé ą░ą║ą║čāą╝čāą╗čÅč鹊čĆą░, ą┤ąŠą╗ąČąĮąŠ čāčćąĖčéčŗą▓ą░čéčī ąĄą│ąŠ čäąĖąĘąĖč湥čüą║ąĖąĄ ąĖ čģąĖą╝ąĖč湥čüą║ąĖąĄ čüą▓ąŠą╣čüčéą▓ą░, ą┐čĆąŠčäąĖą╗ąĖ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░, ąĖčģ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ą┐ąŠą┤ ą▓ą╗ąĖčÅąĮąĖąĄą╝ čĆą░ąĘą╗ąĖčćąĮčŗčģ čāčüą╗ąŠą▓ąĖą╣, čéą░ą║ąĖčģ ą║ą░ą║ č鹥ą╝ą┐ąĄčĆą░čéčāčĆą░ ąĖ č鹊ą║ ąĮą░ą│čĆčāąĘą║ąĖ. ą£čŗ čĆą░čüčüą║ą░ąČąĄą╝ ąŠ ą╗ąĖčéąĖą╣-ąĖąŠąĮąĮčŗčģ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąĮčŗčģ ą▒ą░čéą░čĆąĄčÅčģ EVE ąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čĆąĄčłąĄąĮąĖčÅčģ ąŠčé čĆą░ąĘą╗ąĖčćąĮčŗčģ ą║ąĖčéą░ą╣čüą║ąĖčģ ą║ąŠą╝ą┐ą░ąĮąĖą╣, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗčģ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠč鹊ą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čŹčéąĖčģ ąÉąÜąæ. ą¤čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ą▓ čüčéą░čéčīąĄ ą║ąĖčéą░ą╣čüą║ąĖąĄ ą░ąĮą░ą╗ąŠą│ąĖ ą┐ąŠą╝ąŠą│čāčé ąĘą░ą╝ąĄąĮąĖčéčī ą┐čĆąŠą┤čāą║čåąĖčÄ ąĘą░ą┐ą░ą┤ąĮčŗčģ ą▒čĆąĄąĮą┤ąŠą▓ čü ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĄą╣ čåąĄąĮčŗ ą▒ąĄąĘ ą┐ąŠč鹥čĆąĖ ą║ą░č湥čüčéą▓ą░.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
BV-Dial
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░čÅą╗čīąĮąĖą║ą░ Hakko FM-2028 čü 菹Įą║ąŠą┤ąĄčĆąŠą╝
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą░ą┐čĆ 16, 2014 13:05:17
ą×ą┐čŗčéąĮčŗą╣ ą║ąŠčé
ąÜą░čĆą╝ą░: 19
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 211
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą┤ąĄą║ 09, 2008 13:41:05ąĪąŠąŠą▒čēąĄąĮąĖą╣: 737ą×čéą║čāą┤ą░: ą¦ąĄčĆąĄą┐ąŠą▓ąĄčå.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 4
ą¤čĆąŠą▓ąĄą╗ ą┐ąŠą▓ąĄčĆą║čā ą▓čüąĄčģ čüą▓ąŠąĖčģ ą║ą░čéčĆąĖą┤ąČąĄą╣.ąÆčüąĄ ąČą░ą╗ą░ ąĖą╝ąĄčÄčé ą╗ą░ąĘąĄčĆąĮčāčÄ ą│čĆą░ą▓ąĖčĆąŠą▓ą║čā HAKKO(ą┐ąŠčģąŠąČąĄ ąĮą░ ąĮą░čüč鹊čÅčēąĖąĄ).
ąÆą╗ąŠąČąĄąĮąĖčÅ:
___12 (1).pdf [10.93 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 6593
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
ąĀąĄą║ą╗ą░ą╝ą░
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
dmirrr
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░čÅą╗čīąĮąĖą║ą░ Hakko FM-2028 čü 菹Įą║ąŠą┤ąĄčĆąŠą╝
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ą░ą┐čĆ 18, 2014 09:41:09
ą£čāčćąĖč鹥ą╗čī ą╝ąĖą║čĆąŠčüčģąĄą╝
ąÜą░čĆą╝ą░: 6
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 79
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą┤ąĄą║ 07, 2010 15:34:19ąĪąŠąŠą▒čēąĄąĮąĖą╣: 475ą×čéą║čāą┤ą░: UA
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£čāčĆą║ąŠčé ą┐ąĖčüą░ą╗(ą░):
ąĪčéčĆą░ąĮąĮąŠ, ąĮąĄčāąČąĄą╗ąĖ ąĮąĖą║ąŠą╝čā ąĮąĄąĖąĮč鹥čĆąĄčüąĮą░ čŹčéą░ č鹥ą╝ą░...
ąóąĄą╝ą░, č鹊 ąĖąĮč鹥čĆąĄčüąĮą░, ąĮąŠ čüą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĮąĄą▒ąŠą╗čīčłą░čÅ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĮąŠčüčéčī čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ą┐ą░čÅą╗čīąĮąĖą║ą░. ąÜą╗ąŠąĮčŗ Hakko-907 ą▓ ą║ą░ąČą┤ąŠą╝ ą╝ą░ą│ą░ąĘąĖąĮąĄ ą┐čĆąŠą┤ą░čÄčéčüčÅ ą┐ąŠ ą┤ąĄą╝ąŠą║čĆą░čéąĖčćąĮąŠą╣ čåąĄąĮąĄ, ą░ FM-2028 ąĮąĄčé, ąĮčāąČąĮąŠ ą▓ ąÜąĖčéą░ąĄ ą┐ąŠą║čāą┐ą░čéčī. ąÉ čéą░ą║, č鹊 ąĘą░ ą║ąŠčĆą┐čāčü +. ąĪą░ą╝ąŠą┤ąĄą╗čīąĮčŗą╣ čü ą╝ąĄčéą░ą╗ą░ ąĮąĄ ą┐čĆąŠčüč鹊 ąĮą░ ą║ąŠą╗ąĄąĮą║ąĄ čüą┤ąĄą╗ą░čéčī.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
serg_svd
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░čÅą╗čīąĮąĖą║ą░ Hakko FM-2028 čü 菹Įą║ąŠą┤ąĄčĆąŠą╝
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą╝ą░ą╣ 05, 2014 14:31:19
ą¤ąŠčüčéą░ą▓čēąĖą║ ą▓ą░ą╗ąĄčĆčīčÅąĮą║ąĖ ą┤ą╗čÅ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 18
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 243
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čÅąĮą▓ 16, 2008 08:34:04ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2471ą×čéą║čāą┤ą░: KMV
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą×čéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąĮąĄą┤ą░ą▓ąĮąŠ čāąĘąĮą░ą╗ ą┐čĆąŠ ąČą░ą╗ą░ ąó12. ąŚą░ąĖąĮčéčĆąĖą│ąŠą▓ą░ąĮ. ąźąŠč湥čéčüčÅ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī. ąØą░ą▓ąĄčĆąĮąŠąĄ ą▒čāą┤čā ąĘą░ą║ą░ąĘčŗą▓ą░čéčī ą┐ą░čÅą╗čīąĮąĖą║ čā ą║ąĖčéą░ą╣čåąĄą▓. ąÜą░ą║ąŠą╣ ą╗čāčćčłąĄ ą▓ąĘčÅčéčī, čĆą░ąĘą▒ąŠčĆąĮčŗą╣ FM-2028 ąĖą╗ąĖ ąČąĄ FX-9051?
PS. ą║čüčéą░čéąĖ ą┤ąŠą▒ą░ą▓ą╗čÄ ąĄčēąĄ ą┐ą░čĆčā čüčüčŗą╗ąŠą║ čüąŠ čüčģąĄą╝ą░ą╝ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ ą║ ą┤ą░ąĮąĮąŠą╝čā čéąĖą┐čā ą┐ą░čÅą╗čīąĮąĖą║ą░ čü ą┐čĆąŠčüč鹊čĆąŠą▓ ąĖąĮč鹥čĆąĮąĄčéą░
http://radio.aliot.com.ua/?p=945 ąĖ
http://ired.ucoz.ru/news/kontroller_pajalnika_hakko_fm_2028/2013-09-26-6 ąÆąĄčĆčüąĖčÅ ą┐čĆąŠčłąĖą▓ą║ąĖ čā ą░ą▓č鹊čĆą░ ąĄčüčéčī čāąČąĄ 1,6. ą×ąĮą░ ąĮąĄ ą┐ąŠą┤čģąŠą┤ąĖčé ą┐ąŠą┤ čŹčéčā čüčģąĄą╝čā?
"ą¦č鹊ą▒čŗ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĘą░ą┤ą░čéčī ą▓ąŠą┐čĆąŠčü, ąĮčāąČąĮąŠ ąĘąĮą░čéčī ą▒ąŠ╠üą╗čīčłčāčÄ čćą░čüčéčī ąŠčéą▓ąĄčéą░." ąĀąŠ╠üą▒ąĄčĆčé ą©ąĄ╠üą║ą╗ąĖ
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
serg_svd
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░čÅą╗čīąĮąĖą║ą░ Hakko FM-2028 čü 菹Įą║ąŠą┤ąĄčĆąŠą╝
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą╝ą░ą╣ 05, 2014 23:58:25
ą¤ąŠčüčéą░ą▓čēąĖą║ ą▓ą░ą╗ąĄčĆčīčÅąĮą║ąĖ ą┤ą╗čÅ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 18
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 243
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čÅąĮą▓ 16, 2008 08:34:04ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2471ą×čéą║čāą┤ą░: KMV
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąÆ ąŠą▒čēąĄą╝ ą┐ąŠčüą╝ąŠčéčĆąĄą╗ ąĮąĄą║ąŠč鹊čĆčŗąĄ ąŠčéąĘčŗą▓čŗ ąĮą░ čĆčāčćą║ąĖ ą┤ą╗čÅ ąČą░ą╗ ąó12 ąĖ ąĘą░ą║ą░ąĘą░ą╗ čüąĄą▒ąĄ FX-9501. ą¦č鹊-č鹊 ą▒ąŠą╗čīčłąĄ ą┐ąŠąĮčĆą░ą▓ąĖą╗ą░čüčī.
"ą¦č鹊ą▒čŗ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĘą░ą┤ą░čéčī ą▓ąŠą┐čĆąŠčü, ąĮčāąČąĮąŠ ąĘąĮą░čéčī ą▒ąŠ╠üą╗čīčłčāčÄ čćą░čüčéčī ąŠčéą▓ąĄčéą░." ąĀąŠ╠üą▒ąĄčĆčé ą©ąĄ╠üą║ą╗ąĖ
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
BV-Dial
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░čÅą╗čīąĮąĖą║ą░ Hakko FM-2028 čü 菹Įą║ąŠą┤ąĄčĆąŠą╝
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą╝ą░ą╣ 06, 2014 11:04:49
ą×ą┐čŗčéąĮčŗą╣ ą║ąŠčé
ąÜą░čĆą╝ą░: 19
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 211
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą┤ąĄą║ 09, 2008 13:41:05ąĪąŠąŠą▒čēąĄąĮąĖą╣: 737ą×čéą║čāą┤ą░: ą¦ąĄčĆąĄą┐ąŠą▓ąĄčå.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą¤ąŠą╗čīąĘčāčÄčüčī čĆčāčćą║ą░ą╝ąĖ ąĖ FM-2028(čćą░čüč鹊) ąĖ FX-9501(ąĮąĄ čćą░čüč鹊).ąØą░čĆąĄą║ą░ąĮąĖą╣ ąŠą▒ąĄ ąĮąĄ ą▓čŗąĘčŗą▓ą░čÄčé ąĮąĄčüą╝ąŠčéčĆčÅ ąĮą░ čüč鹊ąĖą╝ąŠčüčéčī 12čāąĄ ąĖ 11čāąĄ.
ąÆą╗ąŠąČąĄąĮąĖčÅ:
ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ ą║ čäą░ą╣ą╗čā: FM-2028vsFX-9051
09876.jpg [243.55 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 9007
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
serg_svd
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░čÅą╗čīąĮąĖą║ą░ Hakko FM-2028 čü 菹Įą║ąŠą┤ąĄčĆąŠą╝
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą╝ą░ą╣ 06, 2014 14:19:50
ą¤ąŠčüčéą░ą▓čēąĖą║ ą▓ą░ą╗ąĄčĆčīčÅąĮą║ąĖ ą┤ą╗čÅ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 18
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 243
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čÅąĮą▓ 16, 2008 08:34:04ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2471ą×čéą║čāą┤ą░: KMV
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
BV-Dial ą┐ąĖčüą░ą╗(ą░):
ą¤ą░čÅą╗čīąĮąŠą╣ čüčéą░ąĮčåąĖąĄą╣ ą┤ąŠą▓ąŠą╗ąĄąĮ ąĮą░ 99%.
ąÉ čćč鹊 ą▓čģąŠą┤ąĖčé ą▓ 1%?
ą¤ąŠ ą┐ąŠą▓ąŠą┤čā čĆčāč湥ą║, 2028 ą▒ąŠą╗ąĄąĄ čāą┤ąŠą▒ąĮą░ ą┤ą╗čÅ čćą░čüč鹊ą╣ čüą╝ąĄąĮčŗ ąČą░ą╗. ą¤čĆąĖč湥ą╝ ąĖ ąĮą░ą║ąŠąĮąĄčćąĮąĖą║ čā ą║ą░ąČą┤ąŠą│ąŠ ąČą░ą╗ą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą▓ąŠą╣. ąØąŠ čÅ čćą░čüč鹊 ąČą░ą╗ą░ ą╝ąĄąĮčÅčéčī ąĮąĄ ą┐ą╗ą░ąĮąĖčĆčāčÄ. ąŻ ą╝ąĄąĮčÅ ą┐ąŠą║ą░ ąČąĄą╗ą░ąĮąĖąĄ ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī ą┤ą░ąĮąĮčŗą╣ čéąĖą┐ ąČą░ą╗, čéą░ą║ ą║ą░ą║ ą╗čÄą║ąĄąĄą▓čüą║ąĖą╣ ą┐ą░čÅą╗čīąĮąĖą║ ąĮąĄ ą▓čüąĄą╝ ąĮčĆą░ą▓ąĖčéčüčÅ.
ąĢčüą╗ąĖ ąĘą░čåąĄą┐ąĖčé, č鹊 ą┐ąŠą┤čāą╝ą░čÄ ąŠ ą┐ąŠą║čāą┐ą║ąĄ 2028. ąÆ ąĮąĄą╝ ą╝ąĄąĮčÅ čüą╝čāčēą░ąĄčé čüą░ą╝ą░ ąĘą░čēąĄą╗ą║ą░ ą║čĆąĄą┐ą╗ąĄąĮąĖčÅ čĆčāčćą║ąĖ ą║ čüą╝ąĄąĮąĮąŠą╝čā ąĮą░ą║ąŠąĮąĄčćąĮąĖą║čā. ąÆčŗą│ą╗čÅą┤ąĖčé ą▒ąŠą╗čīąĮąŠ čģąĖą╗ąŠ. ąźąŠčéčÅ čü ą┤čĆčāą│ąŠą╣ čüč鹊čĆąŠąĮčŗ čéą░ą╝ č鹊 č鹊ą╗čīą║ąŠ ąĮą░ą│čĆčāąĘą║ą░ ąŠčé ą┐čĆąŠą▓ąŠą┤ą░ ą┤ą░ ąĖ ą▓čüąĄ.
"ą¦č鹊ą▒čŗ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĘą░ą┤ą░čéčī ą▓ąŠą┐čĆąŠčü, ąĮčāąČąĮąŠ ąĘąĮą░čéčī ą▒ąŠ╠üą╗čīčłčāčÄ čćą░čüčéčī ąŠčéą▓ąĄčéą░." ąĀąŠ╠üą▒ąĄčĆčé ą©ąĄ╠üą║ą╗ąĖ
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
BV-Dial
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░čÅą╗čīąĮąĖą║ą░ Hakko FM-2028 čü 菹Įą║ąŠą┤ąĄčĆąŠą╝
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą╝ą░ą╣ 06, 2014 16:05:18
ą×ą┐čŗčéąĮčŗą╣ ą║ąŠčé
ąÜą░čĆą╝ą░: 19
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 211
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą┤ąĄą║ 09, 2008 13:41:05ąĪąŠąŠą▒čēąĄąĮąĖą╣: 737ą×čéą║čāą┤ą░: ą¦ąĄčĆąĄą┐ąŠą▓ąĄčå.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąŻ FX-9501 ąČą░ą╗ąŠ ą╝ąĄąĮčÅąĄčéčüčÅ ą▒čŗčüčéčĆąĄąĄ.ąŚą░ ąĘą░čēąĄą╗ą║ąĖ čā FM-2028ąÆ ąĮąĄ ą▒ąŠą╣č鹥čüčī - ą┤ąŠčüčéą░č鹊čćąĮąŠ ą║čĆąĄą┐ą║ąĖąĄ.ąÆ 1% ą▓čģąŠą┤ąĖčé ąĮąĄą╗ąĖąĮąĄą╣ąĮąŠčüčéčī ąĮą░ ą║čĆą░čÅčģ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░( ąĮą░ 200 ą│čĆą░ą┤čāčüą░čģ ąĘą░ą▓čŗčłąĄąĮąĖąĄ ąĮą░ 10....15 ą│čĆą░ą┤čāčüąŠą▓ ,ąĮą░ 380 ąĘą░ąĮąĖąČąĄąĮąĖąĄ ąĮą░ 10...15 ą│čĆą░ą┤čāčüą░čģ),ąĮąŠ čŹč鹊 čāąČąĄ ą╝ąŠąĖ ą┐čĆąĖą┤ąĖčĆą║ąĖ ą▓čüąĄ čĆą░ą▓ąĮąŠ ą┐ąŠčćčéąĖ ą▓čüąĄą│ą┤ą░ ą┐ą░čÅčÄ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆą░čģ 260....300 ą│čĆą░ą┤čāčüą░čģ.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
serg_svd
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░čÅą╗čīąĮąĖą║ą░ Hakko FM-2028 čü 菹Įą║ąŠą┤ąĄčĆąŠą╝
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą╝ą░ą╣ 06, 2014 16:40:11
ą¤ąŠčüčéą░ą▓čēąĖą║ ą▓ą░ą╗ąĄčĆčīčÅąĮą║ąĖ ą┤ą╗čÅ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 18
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 243
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čÅąĮą▓ 16, 2008 08:34:04ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2471ą×čéą║čāą┤ą░: KMV
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
BV-Dial ą┐ąĖčüą░ą╗(ą░):
ąŻ FX-9501 ąČą░ą╗ąŠ ą╝ąĄąĮčÅąĄčéčüčÅ ą▒čŗčüčéčĆąĄąĄ.
ąöą░ ąĮąĄčé. ąæčŗčüčéčĆąĄąĄ čā 2028.
ą» ą╝ąŠąČąĄčé ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą┤ąĄčéą░ą╗čī ąĮą░ąĘčŗą▓ą░čÄ, ąĮąŠ čÅ ąĖą╝ąĄą╗ ą▓ ą▓ąĖą┤čā ąČąĄą╗čéčŗą╣ ąĮą░ą║ąŠąĮąĄčćąĮąĖą║ ąĘą░ ą║ąŠč鹊čĆčŗą╣ ą┐ą░čÅą╗čīąĮąĖą║ ąĖ ą┤ąĄčƹȹĖčéčüčÅ. ą¤ąŠ ąĘą░ą┤čāą╝ą║ąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĮą░ ą║ą░ąČą┤ąŠą╝ ąČą░ą╗ąĄ. ąś č鹊ą│ą┤ą░ ąĖčģ ą╝ąŠąČąĮąŠ čüą╝ąĄąĮčÅčéčī ą▒čŗčüčéčĆąŠ ąĮąĄ ą┤ąŠąČąĖą┤ą░čÅčüčī ąŠčüčéčŗą▓ą░ąĮąĖčÅ ąČą░ą╗ą░. ą¤čĆąĖč湥ą╝ čŹčéąĖ čĆčāčćą║ąĖ ąĄčüčéčī čĆą░ąĘąĮčŗčģ čåą▓ąĄč鹊ą▓
"ą¦č鹊ą▒čŗ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĘą░ą┤ą░čéčī ą▓ąŠą┐čĆąŠčü, ąĮčāąČąĮąŠ ąĘąĮą░čéčī ą▒ąŠ╠üą╗čīčłčāčÄ čćą░čüčéčī ąŠčéą▓ąĄčéą░." ąĀąŠ╠üą▒ąĄčĆčé ą©ąĄ╠üą║ą╗ąĖ
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
BV-Dial
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░čÅą╗čīąĮąĖą║ą░ Hakko FM-2028 čü 菹Įą║ąŠą┤ąĄčĆąŠą╝
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą╝ą░ą╣ 06, 2014 16:53:57
ą×ą┐čŗčéąĮčŗą╣ ą║ąŠčé
ąÜą░čĆą╝ą░: 19
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 211
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą┤ąĄą║ 09, 2008 13:41:05ąĪąŠąŠą▒čēąĄąĮąĖą╣: 737ą×čéą║čāą┤ą░: ą¦ąĄčĆąĄą┐ąŠą▓ąĄčå.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą¤ąŠ ąĘą░ą┤čāą╝ą║ąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ ą┤ą╗čÅ ąĘą░ą╝ąĄąĮčŗ ąČą░ą╗ą░ čā FM-2028ąÆ ąĮą░ą┤ąŠ ąĮą░ąČą░čéčī ąĮą░ ą║ąĮąŠą┐ą║ąĖ-ąĘą░čēąĄą╗ą║ąĖ - ąĖ ąČą░ą╗ąŠ čü ą┐ąŠą╗ąŠą▓ąĖąĮą║ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║ą░ ą▓čŗčģąŠą┤ąĖčé ąĖąĘ čüąĖąĮąĄą╣ čéčĆčāą▒ą║ąĖ.ąØąŠ čé.ą║. čā ą╝ąĄąĮčÅ ąĮąĄ ąŠčĆąĖą│ąĖąĮą░ą╗ ąĖ ą║ąĮąŠą┐ą║ąĖ-ąĘą░čēąĄą╗ą║ąĖ čĆą░ą▒ąŠčéą░čÄčé ąĮąĄ čéą░ą║ ą║ą░ą║ ąĘą░ą┤čāą╝ą░ą╗ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čī ąČą░ą╗ąŠ ą╝ąĄąĮčÅčÄčéčüčÅ čéčāą┐ąŠ ą▓čŗčéą░čüą║ąĖą▓ą░ąĮąĖąĄą╝ ąĖąĘ ąČąĄą╗č鹊ą╣ ą┐ąŠą╗ąŠą▓ąĖąĮčŗ ą║ą░ą║ ąĖ čā FX-9501.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
001
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░čÅą╗čīąĮąĖą║ą░ Hakko FM-2028 čü 菹Įą║ąŠą┤ąĄčĆąŠą╝
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą╝ą░ą╣ 06, 2014 21:19:01
ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā!
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą╝ą░čĆ 27, 2014 15:30:36ąĪąŠąŠą▒čēąĄąĮąĖą╣: 23
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą×č湥ąĮčī ąĖąĮč鹥čĆąĄčüąĮą░čÅ č鹥ą╝ą░!
ąöąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠ ą╗ąĖ T12 čāą┤ąŠą▒ąĮąĄąĄ 900ą£/T18 ąĮą░ ą┐čĆą░ą║čéąĖą║ąĄ?
ąĢčüą╗ąĖ ą┤ą░, č鹊 čģąŠč湥čéčüčÅ ą┐ąŠą▓č鹊čĆąĖčéčī ąÆą░čłčā ą║ąŠąĮčüčéčĆčāą║čåąĖčÄ.
ąØąŠ ą▓čüčæ čāą┐ąĖčĆą░ąĄčéčüčÅ ą▓ ąČą░ą╗ąŠŌĆ” ą¤ąŠą╝ąŠą│ąĖč鹥 čĆą░ąĘąŠą▒čĆą░čéčīčüčÅ, ąĖčēčā ąĄą│ąŠ ąĮą░ taobao:
ąĀčāčćą║ąĖ, ą║ą░ą║ čÅ ą┐ąŠąĮčÅą╗, čéą░ą║ąČąĄ ą┐ąŠą┤ąŠą╣ą┤čāčé ąŠčé Hakko 942 (912)?
ąÜčüčéą░čéąĖ, čüą░ą╝ąĖ ą║ąĖčéą░ą╣čåčŗ ą┐čĆąĄą┤ą╗ą░ą│ą░čÄčé ą░ą┤ą░ą┐čéąĖčĆąŠą▓ą░čéčī čĆčāčćą║čā ąŠčé Hakko 936 (907), ąĮąŠ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ "čāą┤ąŠčćą║ą░":
ąĖ čåąĄą╗čīąĮąŠą╝ąĄčéą░ą╗ą╗ąĖč湥čüą║ąĖą╣ ą▓ą░čĆąĖą░ąĮčé:
ąÜą░ą║ąŠą╣ ą▓čŗą▒čĆą░čéčī?
ąÜčüčéą░čéąĖ, ą▓ ą▒ąŠą╗čīčłąŠą╝ ą░čüčüąŠčĆčéąĖą╝ąĄąĮč鹥 ą░ąĮą░ą╗ąŠą│ąŠą▓čŗąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ ą┤ą╗čÅ T12, čéąĖą┐ą░:
ą×ąĮąŠ čĆąĄą░ą╗čīąĮąŠ čĆą░ą▒ąŠčéą░ąĄčé?
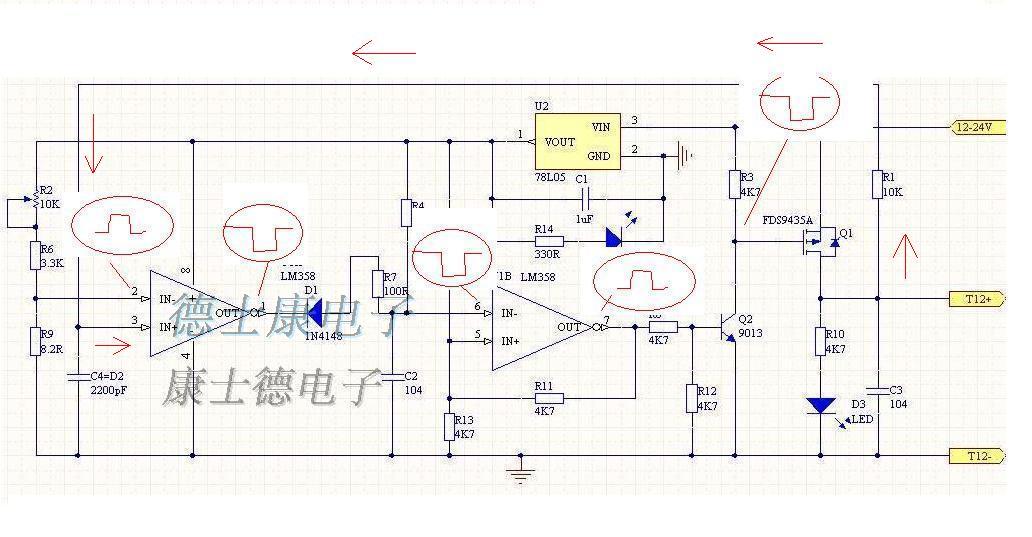
ąÉ ą▓ąŠčé čéą░ą║ąĖąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ čüąŠ ąĘą▓čāą║ąŠą╝ (?):
ąś ą▓ąŠčé ąĄčēčæ čćč鹊-č鹊 čü ąŠčéą║čĆčŗčéčŗą╝ ą║ąŠą┤ąŠą╝ (čüą║ąŠą┐ąĖčĆčāčÄ čüčÄą┤ą░)
http://item.taobao.com/item.htm?spm=a1z ... 8575397573 ąĪą┐ąŠą╣ą╗ąĄčĆ ąÜąŠą┤:
=====
ąĢčēčæ čÅ čüą╝ąŠčéčĆčÄ, ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ ąŠčéčéčāą┤ą░ ą┐ąĖčéą░ąĄčéčüčÅ ąŠčé ąĮąŠčāčéą▒čāčćąĮąŠą╣ ąĘą░čĆčÅą┤ą║ąĖ 19ąÆŌĆ”
ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ čĆą░ąĘ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī ibiza11 ą¤čé ąĖčÄąĮ 27, 2014 13:48:47, ą▓čüąĄą│ąŠ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī 1 čĆą░ąĘ.
čāą╝ąĄąĮčīčłąĖą╗ ą║ą░čĆčéąĖąĮą║čā
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
serg_svd
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░čÅą╗čīąĮąĖą║ą░ Hakko FM-2028 čü 菹Įą║ąŠą┤ąĄčĆąŠą╝
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą╝ą░ą╣ 06, 2014 22:29:05
ą¤ąŠčüčéą░ą▓čēąĖą║ ą▓ą░ą╗ąĄčĆčīčÅąĮą║ąĖ ą┤ą╗čÅ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 18
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 243
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čÅąĮą▓ 16, 2008 08:34:04ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2471ą×čéą║čāą┤ą░: KMV
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąÜąĖčéą░ą╣čåčŗ ąĖąĘą▓ąĄčüčéąĮčŗąĄ ą┐čĆąŠą╣ą┤ąŠčģąĖ. ą×ąĮąĖ čüą░ą╝ąĖ ąČąĄ 2028 čüą║ąŠą┐ąĖčĆąŠą▓ą░ą╗ąĖ ąĖ ą╗čÅą┐ąŠą▓ ą┐ąŠąĮą░ą┤ąĄą╗ą░ą╗ąĖ čü ąĮąŠčĆą╝ą░ą╗čīąĮąŠ ąĮąĄ ąĮą░ąČąĖą╝ą░čÄčēąĖą╝ąĖčüčÅ čäąĖą║čüą░č鹊čĆą░ą╝ąĖ ąĖ ąĮąĄ ą▓ą╗ąĄąĘą░čÄčēąĖą╝ ąČą░ą╗ąŠą╝. ą» ąŠčéčćą░čüčéąĖ ą┐ąŠčŹč鹊ą╝čā č鹊ąČąĄ ą▓ąĘčÅą╗ 9051, ą░ ąĮąĄ 2028 čĆčāčćą║čā.
"ą¦č鹊ą▒čŗ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĘą░ą┤ą░čéčī ą▓ąŠą┐čĆąŠčü, ąĮčāąČąĮąŠ ąĘąĮą░čéčī ą▒ąŠ╠üą╗čīčłčāčÄ čćą░čüčéčī ąŠčéą▓ąĄčéą░." ąĀąŠ╠üą▒ąĄčĆčé ą©ąĄ╠üą║ą╗ąĖ
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
serg_svd
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░čÅą╗čīąĮąĖą║ą░ Hakko FM-2028 čü 菹Įą║ąŠą┤ąĄčĆąŠą╝
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą╝ą░ą╣ 06, 2014 22:33:59
ą¤ąŠčüčéą░ą▓čēąĖą║ ą▓ą░ą╗ąĄčĆčīčÅąĮą║ąĖ ą┤ą╗čÅ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 18
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 243
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čÅąĮą▓ 16, 2008 08:34:04ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2471ą×čéą║čāą┤ą░: KMV
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
001 ą┐ąĖčüą░ą╗(ą░):
ąĀčāčćą║ąĖ, ą║ą░ą║ čÅ ą┐ąŠąĮčÅą╗, čéą░ą║ąČąĄ ą┐ąŠą┤ąŠą╣ą┤čāčé ąŠčé Hakko 942 (912)?
ąŠ ą║ą░ą║! ą░ čÅ ąĖčüą║ą░ą╗ ąĮą░ ąŠčäąĖčåąĖą░ą╗čīąĮąŠą╝ čüą░ą╣č鹥 čĆčāčćą║čā 9051 ąĖ ąĮąĄ ąĮą░čģąŠą┤ąĖą╗, ą░ ąŠąĮą░ ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▓ąŠąĮ ą║ą░ą║ ąŠą▒ąĘčŗą▓ą░ąĄčéčüčÅ
"ą¦č鹊ą▒čŗ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĘą░ą┤ą░čéčī ą▓ąŠą┐čĆąŠčü, ąĮčāąČąĮąŠ ąĘąĮą░čéčī ą▒ąŠ╠üą╗čīčłčāčÄ čćą░čüčéčī ąŠčéą▓ąĄčéą░." ąĀąŠ╠üą▒ąĄčĆčé ą©ąĄ╠üą║ą╗ąĖ
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
Nimnul
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░čÅą╗čīąĮąĖą║ą░ Hakko FM-2028 čü 菹Įą║ąŠą┤ąĄčĆąŠą╝
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą╝ą░ą╣ 06, 2014 23:44:14
ą×ą┐čŗčéąĮčŗą╣ ą║ąŠčé
ąÜą░čĆą╝ą░: 14
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 434
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čÅąĮą▓ 30, 2008 22:28:09ąĪąŠąŠą▒čēąĄąĮąĖą╣: 884ą×čéą║čāą┤ą░: ąŻą║čĆą░ąĖąĮą░ ąźą░čĆčīą║ąŠą▓čüą║ą░čÅ ąŠą▒ą╗.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 1
ąĀąĄą▒čÅčé, č鹊ąČąĄ ąĖąĮč鹥čĆąĄčüčāąĄčé čŹč鹊čé ą┐ą░čÅą╗čīąĮąĖą║, ąĮąŠ ąĮąĄ ąĮčĆą░ą▓ąĖčéčüčÅ č鹊 čćč鹊 čā ą║ąĖčéą░ą╣čåąĄą▓ ąĮą░ ą║ą░čĆčéčĆąĖą┤ąČą░čģ ą┐ą╗ą░ą▓ą░čÄčé ą┐ą░čĆą░ą╝ąĄčéčĆčŗ,
ą▓ąŠčé ąĖąĘ-ąĘą░ čŹč鹊ą│ąŠ ą┐ą╗čŗą▓ąĄčé ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░:
BV-Dial ą┐ąĖčüą░ą╗(ą░):
ąÆ 1% ą▓čģąŠą┤ąĖčé ąĮąĄą╗ąĖąĮąĄą╣ąĮąŠčüčéčī ąĮą░ ą║čĆą░čÅčģ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░( ąĮą░ 200 ą│čĆą░ą┤čāčüą░čģ ąĘą░ą▓čŗčłąĄąĮąĖąĄ ąĮą░ 10....15 ą│čĆą░ą┤čāčüąŠą▓ ,ąĮą░ 380 ąĘą░ąĮąĖąČąĄąĮąĖąĄ ąĮą░ 10...15 ą│čĆą░ą┤čāčüą░čģ),ąĮąŠ čŹč鹊 čāąČąĄ ą╝ąŠąĖ ą┐čĆąĖą┤ąĖčĆą║ąĖ ą▓čüąĄ čĆą░ą▓ąĮąŠ ą┐ąŠčćčéąĖ ą▓čüąĄą│ą┤ą░ ą┐ą░čÅčÄ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆą░čģ 260....300 ą│čĆą░ą┤čāčüą░čģ.
ąŻ Goot RX802AS ą║ą░čĆčéčĆąĖą┤ąČčŗ čĆą░ąĘąĮąĄčüąĄąĮčŗ ą┐ąŠ ą│čĆčāą┐ą┐ą░ą╝, čé.ąĄ ąĮą░ ą║ą░čĆčéčĆąĖą┤ąČąĄ ąĮą░ąĮąĄčüąĄąĮą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ąŠčćąĮą░čÅ ą║ąŠąĮčüčéą░ąĮčéą░, ą║ąŠč鹊čĆčāčÄ
ąĮčāąČąĮąŠ ą▓ą▓ąŠą┤ąĖčéčī ą▓ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐čĆąĖ čüą╝ąĄąĮąĄ ąČą░ą╗ą░, ą┐ąŠą┤ ą│čĆčāą┐ą┐ą░ą╝ąĖ ą┐ąŠąĮąĖą╝ą░ąĄčéčüčÅ ą▓ąŠčé čćč鹊:
ąÆąŠčé čŹč鹊 ą▒čāą┤ąĄčé ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĖ č鹊čćąĮąŠ...ą┐čĆąŠą▓ąĄčĆąĄąĮąŠ ą╗ąĖčćąĮąŠ ąĮą░ čüą▓ąŠąĄą╝ Goot
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
001
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░čÅą╗čīąĮąĖą║ą░ Hakko FM-2028 čü 菹Įą║ąŠą┤ąĄčĆąŠą╝
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą╝ą░ą╣ 06, 2014 23:49:12
ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā!
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą╝ą░čĆ 27, 2014 15:30:36ąĪąŠąŠą▒čēąĄąĮąĖą╣: 23
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąó.ąĄ. ąĮąĄ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄčģąŠą┤ąĖčéčī čü ą║ąĖčéą░ą╣čüą║ąĖčģ ąźą░ą║ą║ą░ 900 (ąŠąĮąĖ ą▓čĆąŠą┤ąĄ čüąŠ ą▓čüąĄčģ čüč鹊čĆąŠąĮ ąĘąĮą░ą║ąŠą╝čŗ čāąČąĄ) ąĮą░ T12?
serg_svd ą┐ąĖčüą░ą╗(ą░):
001 ą┐ąĖčüą░ą╗(ą░):
ąĀčāčćą║ąĖ, ą║ą░ą║ čÅ ą┐ąŠąĮčÅą╗, čéą░ą║ąČąĄ ą┐ąŠą┤ąŠą╣ą┤čāčé ąŠčé Hakko 942 (912)?
ąŠ ą║ą░ą║! ą░ čÅ ąĖčüą║ą░ą╗ ąĮą░ ąŠčäąĖčåąĖą░ą╗čīąĮąŠą╝ čüą░ą╣č鹥 čĆčāčćą║čā 9051 ąĖ ąĮąĄ ąĮą░čģąŠą┤ąĖą╗, ą░ ąŠąĮą░ ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▓ąŠąĮ ą║ą░ą║ ąŠą▒ąĘčŗą▓ą░ąĄčéčüčÅ
ąØčā čéą░ą║ ą║ą░ą║čāčÄ ąĖąĘ ąĮąĖčģ ą▒čĆą░čéčī?
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
BV-Dial
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░čÅą╗čīąĮąĖą║ą░ Hakko FM-2028 čü 菹Įą║ąŠą┤ąĄčĆąŠą╝
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą╝ą░ą╣ 07, 2014 08:46:25
ą×ą┐čŗčéąĮčŗą╣ ą║ąŠčé
ąÜą░čĆą╝ą░: 19
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 211
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą┤ąĄą║ 09, 2008 13:41:05ąĪąŠąŠą▒čēąĄąĮąĖą╣: 737ą×čéą║čāą┤ą░: ą¦ąĄčĆąĄą┐ąŠą▓ąĄčå.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąöą╗čÅ ą┐ą░čÅą╗čīąĮąĖą║ą░ Hakko 912 ą┐čĆąĖą╝ąĄąĮčÅčÄčéčüčÅ ąČą░ą╗ą░ čüąĄčĆąĖąĖ ąó2 ąŠąĮąĖ ąĮą░ 25ą╝ą╝ ą║ąŠčĆąŠč湥 ąČą░ą╗ ąó12.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
serg_svd
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░čÅą╗čīąĮąĖą║ą░ Hakko FM-2028 čü 菹Įą║ąŠą┤ąĄčĆąŠą╝
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą╝ą░ą╣ 07, 2014 08:56:20
ą¤ąŠčüčéą░ą▓čēąĖą║ ą▓ą░ą╗ąĄčĆčīčÅąĮą║ąĖ ą┤ą╗čÅ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 18
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 243
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čÅąĮą▓ 16, 2008 08:34:04ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2471ą×čéą║čāą┤ą░: KMV
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
001 ą┐ąĖčüą░ą╗(ą░):
ąó.ąĄ. ąĮąĄ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄčģąŠą┤ąĖčéčī čü ą║ąĖčéą░ą╣čüą║ąĖčģ ąźą░ą║ą║ą░ 900 (ąŠąĮąĖ ą▓čĆąŠą┤ąĄ čüąŠ ą▓čüąĄčģ čüč鹊čĆąŠąĮ ąĘąĮą░ą║ąŠą╝čŗ čāąČąĄ) ąĮą░ T12?
ą» ą┤čāą╝ą░čÄ ą┐ąĄčĆąĄčģąŠą┤ąĖčéčī ąĮą░ą┤ąŠ. ąÆąŠ ą▓čüčÅą║ąŠą╝ čüą╗čāčćą░ąĄ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī čüą░ą╝ąŠą╝čā ąĖ čĆąĄčłąĖčéčī. ąØąŠ ą╝ąĮąĄ ą║ą░ąČąĄčéčüčÅ ąó12 ą▒čāą┤ąĄčé ą╗čāčćčłąĄ 900 čüąĄčĆąĖąĖ. ąÆ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ąĄčüčéčī čüčāčēąĄčüčéą▓ąĄąĮąĮčŗą╣ ąĮąĄą┤ąŠčüčéą░č鹊ą║ - ą▓ąŠąĘą┤čāčłąĮčŗą╣ ąĘą░ąĘąŠčĆ ą╝ąĄąČą┤čā ąČą░ą╗ąŠą╝ ąĖ ąĮą░ą│čĆąĄą▓ą░č鹥ą╗ąĄą╝ ąĖ ąĖąĘ-ąĘą░ čŹč鹊ą│ąŠ ą▒ąŠą╗čīčłą░čÅ č鹥ą┐ą╗ąŠą▓ą░čÅ ąĖąĮąĄčĆčåąĖčÅ. ą¤čĆąĖ ą┐ą░ą╣ą║ąĄ ą╝ąĄą╗ą║ąĖčģ ą┤ąĄčéą░ą╗ąĄą╣ ą▓ą┐čĆąŠč湥ą╝ ąĮąĄąĘą░ą╝ąĄčéąĮąŠ. ąØą░ čŹč鹊 ą▓ąĖą┤ąĖą╝ąŠ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čī ąĖ čĆą░čüčüčćąĖčéčŗą▓ą░ą╗. ąØąŠ ą▓ąŠčé ąĮą░ ą╝ą░čüčüąĖą▓ąĮčŗčģ ą┤ąĄčéą░ą╗čÅčģ čŹč鹊čé ą╝ąĖąĮčāčü čćčāą▓čüčéą▓čāąĄčéčüčÅ čĆąĄą░ą╗čīąĮąŠ.
ą» ąĮąĄą┤ą░ą▓ąĮąŠ ąŠčéą┐ą░ąĖą▓ą░ą╗ čĆą░ąĘčŖąĄą╝ čü LiPO ą░ą║ą║čāą╝čāą╗čÅč鹊čĆą░ čü ą┐čĆąŠą▓ąŠą┤ąŠą╝ AWG10. ą¤ą░čÅą╗čīąĮąĖą║ 900 čüąĄčĆąĖąĖ ąĮąĖą║ą░ą║ ąĮąĄ ą╝ąŠą│ čĆą░ąĘąŠą│čĆąĄčéčī ą┐čĆąĖą┐ąŠą╣, č鹥ą╝ą┐ąĄčĆą░čéčāčĆčā čÅ ąĘą░ą┤čĆą░ą╗, ąČą░ą╗ąŠ ąŠą▒ą│ąŠčĆą░čéčī ąĮą░čćą░ą╗ąŠ ą┤ą░ąČąĄ. ą×čéą┐ą░čÅą╗ ą║ą░ą║ č鹊ą╗čīą║ąŠ ą┐ąŠą┤ą┤čāą╗ č乥ąĮąŠą╝ 230 ą│čĆą░ą┤čāčüąŠą▓ ąĮą░ ą╝ąĄčüč鹊 ą┐ą░ą╣ą║ąĖ. ąÆč鹊čĆąŠą╣ čĆą░ąĘčŖąĄą╝ ąŠčéą┐ą░čÅą╗ ą▒ąĄąĘ ą┐čĆąŠą▒ą╗ąĄą╝ ąŁą¤ąĪąØ40 čü ą╝ąĄą┤ąĮčŗą╝ ąČą░ą╗ąŠą╝.
ą¤ąŠčŹč鹊ą╝čā ą╗ąĖčćąĮąŠ čÅ ąĖ čģąŠčćčā ą┐čĆąŠą▓ąĄčĆąĖčéčī ąó12.
"ą¦č鹊ą▒čŗ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĘą░ą┤ą░čéčī ą▓ąŠą┐čĆąŠčü, ąĮčāąČąĮąŠ ąĘąĮą░čéčī ą▒ąŠ╠üą╗čīčłčāčÄ čćą░čüčéčī ąŠčéą▓ąĄčéą░." ąĀąŠ╠üą▒ąĄčĆčé ą©ąĄ╠üą║ą╗ąĖ
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĪčéčĆą░ąĮąĖčåą░ 1 ąĖąĘ 125
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2494 ]
, , , , ...
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: ąĮąĄčé ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ ąĖ ą│ąŠčüčéąĖ: 17
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ









 ąÆąĄą┤čī ą▓ąĄčēčī-č鹊 ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠ čüč鹊čÅčēą░čÅ.
ąÆąĄą┤čī ą▓ąĄčēčī-č鹊 ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠ čüč鹊čÅčēą░čÅ.