|
ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - ąÉą╗ą│ąŠčĆąĖčéą╝ ą┐ą╗ą░ą▓ąĮąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ čłą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
 
|
ąĪčéčĆą░ąĮąĖčåą░ 1 ąĖąĘ 1
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 19 ] |
|
| ąÉą▓č鹊čĆ |
ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
isx

|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: ąÉą╗ą│ąŠčĆąĖčéą╝ ą┐ą╗ą░ą▓ąĮąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ čłą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ  ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ č乥ą▓ 12, 2018 07:27:47 |
|
| ą¤ąŠčüčéą░ą▓čēąĖą║ ą▓ą░ą╗ąĄčĆčīčÅąĮą║ąĖ ą┤ą╗čÅ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 11
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 26
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ąĖčÄąĮ 26, 2011 20:03:21
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2310
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ą¤čĆąĖą▓ąĄčéčüčéą▓čāčÄ ą▓čüąĄčģ.
ąĪąĖąČčā ąĖ ą╗ąŠą╝ą░čÄ ą│ąŠą╗ąŠą▓čā ąĮą░ą┤ ąŠą┤ąĮąĖą╝ ą▓ąŠą┐čĆąŠčüąŠą╝ - ą║ą░ą║ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą┐ą╗ą░ą▓ąĮąŠ čĆą░ąĘąŠą│ąĮą░čéčī ąĖ ą│ą╗ą░ą▓ąĮąŠąĄ ąĘą░č鹊čĆą╝ąŠąĘąĖčéčī čłą░ą│ąŠą▓ąĖą║.
ąÆ ą░čĆčüąĄąĮą░ą╗ąĄ ąĄčüčéčī čüą╗ąĄą┤čāčÄčēąĖąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ:
ąóąĄą║čāčēą░čÅ čüą║ąŠčĆąŠčüčéčī;
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ ą┤ąŠą┐čāčüčéąĖą╝ą░čÅ čüą║ąŠčĆąŠčüčéčī;
ą£ąĖąĮąĖą╝ą░ą╗čīąĮą░čÅąĖą┤ąŠą┐čāčüčéąĖą╝ą░čÅ čüą║ąŠčĆąŠčüčéčī;
ąŚąĮą░č湥ąĮąĖąĄ čĆą░ąĘą│ąŠąĮą░ (čłą░ą│ąŠą▓ ą▓ čüąĄą║čāąĮą┤čā);
ąŚąĮą░č湥ąĮąĖąĄ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ (čłą░ą│ąŠą▓ ą▓ čüąĄą║čāąĮą┤čā);
ą×čüčéą░ą▓čłąĄąĄą░čÅ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čłą░ą│ąŠą▓ ą┤ąŠ ą┐ąŠą╗ąĮąŠą╣ ąŠčüčéą░ąĮąŠą▓ą║ąĖ.
ą¤ąŠą║ą░ ąĖčüą┐ąŠą╗čīąĘčāčÄ čéą░ą║čāčÄ čüčģąĄą╝čā: ą┐ą╗ą░ą▓ąĮąŠ čĆą░ąĘą│ąŠąĮčÅčÄ ą┤ą▓ąĖą│ą░č鹥ą╗čī ą┐čĆąĖ čüčéą░čĆč鹥 ąŠčé ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą╣ ą┤ąŠą┐čāčüčéąĖą╝ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą┤ąŠ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣, ą┐čĆąĖą▒ą░ą▓ą╗čÅčÅ ą║ č鹥ą║čāčēąĄą╣ čüą║ąŠčĆąŠčüčéąĖ ą║ą░ąČą┤čāčÄ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤čā ąĘąĮą░č湥ąĮąĖąĄ čĆą░ąĘą│ąŠąĮą░/1000. ąØą░ čŹč鹊ą╝ čŹčéą░ą┐ąĄ ą▓čüąĄ čģąŠčĆąŠčłąŠ, ąĮąŠ č鹥ą┐ąĄčĆčī ąĮčāąČąĮąŠ ą┤ąŠąČą┤ą░čéčīčüčÅ ąĮąĄą║ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ, čćč鹊ą▒ ą┐ąŠ čéą░ą║ąŠą╝čā ąČąĄ ą░ą╗ą│ąŠčĆąĖčéą╝čā ąĮą░čćą░čéčī č鹊čĆą╝ąŠąČąĄąĮąĖąĄ.
ąÆąŠą┐čĆąŠčü ą▓ č鹊ą╝, ą║ą░ą║ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą▓čŗčćąĖčüą╗ąĖčéčī čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ čü čāč湥č鹊ą╝ č鹥ą║čāčēąĄą╣ čüą║ąŠčĆąŠčüčéąĖ?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
 |
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
BOB51
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÉą╗ą│ąŠčĆąĖčéą╝ ą┐ą╗ą░ą▓ąĮąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ čłą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ č乥ą▓ 12, 2018 15:59:39 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 93
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1351
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 16, 2010 22:02:27
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 14062
ą×čéą║čāą┤ą░: ąöą×ąØąĢą”ąÜ
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąŁč鹊čé ą▓ąŠą┐čĆąŠčü čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ą╗čüčÅ ą▓ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ čüčéą░čĆčŗčģ čüąŠą▓ąĄčéčüą║ąĖčģ ą┐čĆąĖąĮč鹥čĆąŠą▓ (9-ąĖą│ąŠą╗čīčćą░čéčŗčģ)... ą¢ą░ą╗čī č鹊ą╣ "č乊ą╗ąĖą░ąĮčéčŗ" čā ą╝ąĄąĮčÅ ąĮąĄ čüąŠčģčĆą░ąĮąĖą╗ąŠčüčī... 
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
isx
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÉą╗ą│ąŠčĆąĖčéą╝ ą┐ą╗ą░ą▓ąĮąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ čłą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ č乥ą▓ 12, 2018 21:11:41 |
|
| ą¤ąŠčüčéą░ą▓čēąĖą║ ą▓ą░ą╗ąĄčĆčīčÅąĮą║ąĖ ą┤ą╗čÅ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 11
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 26
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ąĖčÄąĮ 26, 2011 20:03:21
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2310
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąÉ ą┐ąŠ ą┐ą░ą╝čÅčéąĖ ąĮąĖč湥ą│ąŠ ąĮąĄ ą┐ąŠą┤čüą║ą░ąČąĄč鹥? ąæą╗ąĖąĮ, ą▓čĆąŠą┤ąĄ ąĘą░ą┤ą░čćą░ ą┐čĆąŠčüčéą░čÅ, ąĮąŠ č湥čé ąĮąĖą║ą░ą║ ąĮąĄ čüąŠąŠą▒čĆą░ąČčā...
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
AndyBig
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÉą╗ą│ąŠčĆąĖčéą╝ ą┐ą╗ą░ą▓ąĮąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ čłą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé č乥ą▓ 13, 2018 02:26:14 |
|
| ąōčĆčŗąĘąĄčé ą║ą░ąĮąĖč乊ą╗čī |
 |
ąÜą░čĆą╝ą░: -2
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 43
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čÅąĮą▓ 17, 2018 13:09:14
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 250
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąØą░ą┤ąŠ, ąĮą░ą▓ąĄčĆąĮąŠąĄ, ą║ąŠą┐ą░čéčī ą▓ čüč鹊čĆąŠąĮčā č乊čĆą╝čāą╗čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čĆą░čüčüč鹊čÅąĮąĖčÅ ą┐čĆąĖ čĆą░ą▓ąĮąŠčāčüą║ąŠčĆąĄąĮąĮąŠą╝ ą┤ą▓ąĖąČąĄąĮąĖąĖ:  ą│ą┤ąĄ: S - ą┐čĆąŠą╣ą┤ąĄąĮąĮąŠąĄ čĆą░čüčüč鹊čÅąĮąĖąĄ, ą╝ v1 - ąĮą░čćą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī ą┐čĆąĖ čāčüą║ąŠčĆąĄąĮąĖąĖ ąĖą╗ąĖ ą║ąŠąĮąĄčćąĮą░čÅ ą┐čĆąĖ ąĘą░ą╝ąĄą┤ą╗ąĄąĮąĖąĖ, ą╝/čü v2 - ą║ąŠąĮąĄčćąĮą░čÅ čüą║ąŠčĆąŠčüčéčī ą┐čĆąĖ čāčüą║ąŠčĆąĄąĮąĖąĖ ąĖą╗ąĖ ąĮą░čćą░ą╗čīąĮą░čÅ ą┐čĆąĖ ąĘą░ą╝ąĄą┤ą╗ąĄąĮąĖąĖ, ą╝/čü a - čāčüą║ąŠčĆąĄąĮąĖąĄ, ą╝/čü^2 ąóąŠą╗čīą║ąŠ ą▓ą╝ąĄčüč鹊 ą╝ąĄčéčĆąŠą▓ ąĖ čüąĄą║čāąĮą┤ ą┐ąŠą┤čüčéą░ą▓ąĖčéčī čłą░ą│ąĖ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ąĖ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤čŗ. ąóąŠ ąĄčüčéčī: S - ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą┤ąĄą╗ą░ąĮąĮčŗčģ čłą░ą│ąŠą▓ v1 - ąĮą░čćą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī ą┐čĆąĖ čāčüą║ąŠčĆąĄąĮąĖąĖ ąĖą╗ąĖ ą║ąŠąĮąĄčćąĮą░čÅ ą┐čĆąĖ ąĘą░ą╝ąĄą┤ą╗ąĄąĮąĖąĖ, čłą░ą│ąŠą▓/ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤čā v2 - ą║ąŠąĮąĄčćąĮą░čÅ čüą║ąŠčĆąŠčüčéčī ą┐čĆąĖ čāčüą║ąŠčĆąĄąĮąĖąĖ ąĖą╗ąĖ ąĮą░čćą░ą╗čīąĮą░čÅ ą┐čĆąĖ ąĘą░ą╝ąĄą┤ą╗ąĄąĮąĖąĖ, čłą░ą│ąŠą▓/ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤čā a - čāčüą║ąŠčĆąĄąĮąĖąĄ, čłą░ą│ąŠą▓/ą╝čü^2 ąóąŠą│ą┤ą░ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ, čćč鹊 ąĄčüą╗ąĖ, ą║ ą┐čĆąĖą╝ąĄčĆčā, ąĮčāąČąĮąŠ čüąĮąĖąĘąĖčéčī čüą║ąŠčĆąŠčüčéčī ąŠčé 50 ą┤ąŠ 2 čłą░ą│ą░ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤čā čü čāčüą║ąŠčĆąĄąĮąĖąĄą╝ (ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ) 2 čłą░ą│ą░ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤čā, č鹊ą│ą┤ą░ ąĮą░čģąŠą┤ąĖą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čłą░ą│ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą┤ą▓ąĖą│ą░č鹥ą╗čī čüą┤ąĄą╗ą░ąĄčé ą▓ ą┐čĆąŠčåąĄčüčüąĄ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ: 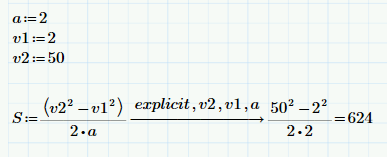 ąŚąĮą░čćąĖčé ąĘą░ 624 čłą░ą│ą░ ą┤ąŠ č鹊ą│ąŠ ą║ą░ą║ čüą║ąŠčĆąŠčüčéčī ą┤ąŠą╗ąČąĮą░ čüčéą░čéčī čĆą░ą▓ąĮąŠą╣ 1 ąĮą░čćąĖąĮą░ąĄą╝ čüąĮąĖąČą░čéčī čüą║ąŠčĆąŠčüčéčī ą┐ąŠ 2 čłą░ą│ą░ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤čā. ą» ąĮąĄ čāą▓ąĄčĆąĄąĮ ą▓ąŠ ą▓čüąĄą╝ čŹč鹊ą╝, ąĮąĄ ą┐čĆąŠą▒ąŠą▓ą░ą╗, ąĮąŠ ą╝ąĮąĄ ą║ą░ąČąĄčéčüčÅ, čćč鹊 ą┤ąŠą╗ąČąĮąŠ čĆą░ą▒ąŠčéą░čéčī  UPD: ąØąĄ, čäąĖą│ąĮčÅ čŹč鹊. ąØąĄ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą┐ąŠč湥ą╝čā-č鹊 čéą░ą║. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 1 hour 23 minutes 48 seconds:Re: ąÉą╗ą│ąŠčĆąĖčéą╝ ą┐ą╗ą░ą▓ąĮąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ čłą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗čÅąóąŠą│ą┤ą░ čüą╝ąŠčéčĆąĄčéčī ą▓ čüč鹊čĆąŠąĮčā čüčāą╝ą╝čŗ čćą╗ąĄąĮąŠą▓ ą░čĆąĖčäą╝ąĄčéąĖč湥čüą║ąŠą╣ ą┐čĆąŠą│čĆąĄčüčüąĖąĖ  S - ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą┤ąĄą╗ą░ąĮąĮčŗčģ čłą░ą│ąŠą▓ v1 - ąĮą░čćą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī ą┐čĆąĖ čāčüą║ąŠčĆąĄąĮąĖąĖ ąĖą╗ąĖ ą║ąŠąĮąĄčćąĮą░čÅ ą┐čĆąĖ ąĘą░ą╝ąĄą┤ą╗ąĄąĮąĖąĖ, čłą░ą│ąŠą▓/ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤čā v2 - ą║ąŠąĮąĄčćąĮą░čÅ čüą║ąŠčĆąŠčüčéčī ą┐čĆąĖ čāčüą║ąŠčĆąĄąĮąĖąĖ ąĖą╗ąĖ ąĮą░čćą░ą╗čīąĮą░čÅ ą┐čĆąĖ ąĘą░ą╝ąĄą┤ą╗ąĄąĮąĖąĖ, čłą░ą│ąŠą▓/ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤čā a - čāčüą║ąŠčĆąĄąĮąĖąĄ, čłą░ą│ąŠą▓/ą╝čü^2 t - čŹč鹊 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čłą░ą│ąŠą▓ čāą╝ąĄąĮčīčłąĄąĮąĖčÅ čüą║ąŠčĆąŠčüčéąĖ ą┤ąŠ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ ąĮčāąČąĮąŠą╣ ąÆąŠčé čéą░ą║ ą▓čĆąŠą┤ąĄ ą▓čüąĄ čüčģąŠą┤ąĖčéčüčÅ čü ą┐ąŠą┤čüč湥č鹊ą╝ ą▓ ą╗ąŠą▒ ąĮą░ ą║ą░ą╗čīą║čāą╗čÅč鹊čĆąĄ
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąÆčŗą▒ąĖčĆą░ąĄą╝ čüčģąĄą╝čā BMS ą┤ą╗čÅ ąĘą░čĆčÅą┤ą░ ą╗ąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗčģ (LiFePO4) ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓
ą×ą▒čÅąĘą░č鹥ą╗čīąĮčŗą╝ čāčüą╗ąŠą▓ąĖąĄą╝ ą┤ąŠą╗ą│ąŠą╣ ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ Li-FePO4-ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ EVE Energy, čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ BMS-ą╝ąĖą║čĆąŠčüčģąĄą╝. ąøąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗąĄ ąÉąÜąæ ąŠčéą╗ąĖčćą░čÄčéčüčÅ čéą░ą║ąĖą╝ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ, ą║ą░ą║ ą▓čŗčüąŠą║ą░čÅ ą╝ąĮąŠą│ąŠą║čĆą░čéąĮąŠčüčéčī čåąĖą║ą╗ąŠą▓ ąĘą░čĆčÅą┤ą░-čĆą░ąĘčĆčÅą┤ą░, ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▒čŗčüčéčĆąŠą╣ ąĘą░čĆčÅą┤ą║ąĖ, čāčüč鹊ą╣čćąĖą▓ąŠčüčéčī ą║ ą▒čāč乥čĆąĮąŠą╝čā čĆąĄąČąĖą╝čā čĆą░ą▒ąŠčéčŗ ąĖ ą┐čĆąĖąĄą╝ą╗ąĄą╝ą░čÅ čüč鹊ąĖą╝ąŠčüčéčī. ąØąŠ ą┤ą╗čÅ čŹčéąĖčģ ąÉąÜąæ ąŠč湥ąĮčī ą▓ą░ąČąĄąĮ ą║ąŠąĮčéčĆąŠą╗čī ą┐čĆąŠčåąĄčüčüą░ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░ ą┤ą╗čÅ ąĖąĘą▒ąĄą│ą░ąĮąĖčÅ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĘą░čĆčÅą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ 100% ąĘą░čĆčÅą┤ą░. ąśąĮąČąĄąĮąĄčĆčŗ ąÜą×ą£ą¤ąŁąø ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖą╗ąĖ čüą┐ąĖčüąŠą║ čéą░ą║ąĖčģ čĆąĄčłąĄąĮąĖą╣ ąŠčé čĆą░ąĘąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
Mishany
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÉą╗ą│ąŠčĆąĖčéą╝ ą┐ą╗ą░ą▓ąĮąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ čłą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé č乥ą▓ 13, 2018 07:39:17 |
|
| ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖą╣ ą║ąŠčé |
 |
ąÜą░čĆą╝ą░: 8
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 128
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄąĮ 20, 2013 00:00:58
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1031
ą×čéą║čāą┤ą░: ą╝ąŠčüą║ą▓ą░, ą╝.ąĪčģąŠą┤ąĮąĄąĮčüą║ą░čÅ
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ą┤ąĄą╗ą░ą╗ ąĮą░ čéą░ą╣ą╝ąĄčĆąĄ, čéą░ą╝ ą▓čüąĄ ą┐čĆąŠčüč鹊 ą▒čŗą╗ąŠ ą▓čĆąŠą┤ąĄ
ą▓ąĖą┤čÄčģčā ąĮą░čłąĄą╗ ą┤ą░ąČąĄ čāą┐čĆą░ą▓ą░ čü ą┐ąĄčĆąĄą╝ąĄąĮąĮąĖą║ą░
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
AndyBig
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÉą╗ą│ąŠčĆąĖčéą╝ ą┐ą╗ą░ą▓ąĮąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ čłą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé č乥ą▓ 13, 2018 09:21:31 |
|
| ąōčĆčŗąĘąĄčé ą║ą░ąĮąĖč乊ą╗čī |
|
ąÜą░čĆą╝ą░: -2
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 43
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čÅąĮą▓ 17, 2018 13:09:14
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 250
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
Mishany ą┐ąĖčüą░ą╗(ą░): ą┤ąĄą╗ą░ą╗ ąĮą░ čéą░ą╣ą╝ąĄčĆąĄ, čéą░ą╝ ą▓čüąĄ ą┐čĆąŠčüč鹊 ą▒čŗą╗ąŠ ą▓čĆąŠą┤ąĄ ąŁč鹊 ąĄčüą╗ąĖ ąĮąĄ ąĮčāąČąĮąŠ ą▓čĆą░čēą░čéčī ąĮą░ č鹊čćąĮąŠ ąĘą░ą┤ą░ąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čłą░ą│ąŠą▓.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Mishany
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÉą╗ą│ąŠčĆąĖčéą╝ ą┐ą╗ą░ą▓ąĮąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ čłą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé č乥ą▓ 13, 2018 09:23:13 |
|
| ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖą╣ ą║ąŠčé |
|
ąÜą░čĆą╝ą░: 8
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 128
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄąĮ 20, 2013 00:00:58
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1031
ą×čéą║čāą┤ą░: ą╝ąŠčüą║ą▓ą░, ą╝.ąĪčģąŠą┤ąĮąĄąĮčüą║ą░čÅ
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 1
|
ąĮąĄčé, čéą░ą╝ ą▓čüąĄ č鹊čćąĮąŠ ą▒čŗą╗ąŠ, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ąĮą░ 2-čģ čéą░ą╣ą╝ąĄčĆą░čģ STM32, čüą╝ąŠčéčĆąĄą╗ ąĖčüčģąŠą┤ąĮąĖą║ ąĮąŠ čćč鹊 č鹊 čü ą║ąŠą╝ąĄąĮčéą░ą╝ąĖ ąŠąĮąĖ ą║ą░ą║ąĖąĄ č鹊 ą╗ąĄą▓čŗąĄ  ą¤čĆąĖąĮčåąĖą┐ ą┐čĆąŠčüčé ą┐ąĄčĆąĄą┤ą░ąĄčłčī ą┐ąŠąĘąĖčåąĖčÄ ą╝ąŠč鹊čĆ ą▓čŗčģąŠą┤ąĖčé ąĮą░ ąĮąĄąĄ čü čāčüą║ąŠčĆąĄąĮąĖąĄą╝ ąĖ ąĘą░ą╝ąĄą┤ą╗ąĄąĮąĖąĄą╝, ą┐čĆąĖč湥ą╝ ą╝ąŠąČąĮąŠ ąĮą░ ą╗ąĄčéčā ą╝ąĄąĮčÅčéčī ą┐ąŠąĘąĖčåąĖčÄ ąĮąĄ ąĘąĮą░čÄ ąŠčé ą║čāą┤ą░ čéą░ą╝ čüą║ąŠčĆąŠčüčéčī ą▓ ą║ą╝/čćą░čü, ąĮąŠ čŹč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčéą▓ąĄčćą░ąĄčé ąĘą░ čāčüą║ąŠčĆąĄąĮąĖąĄ/ąĘą░ą╝ąĄą┤ą╗ąĄąĮąĖąĄ ąĪą┐ąŠą╣ą╗ąĄčƹܹŠą┤: void TIM2_IRQHandler(void)
{
/* USER CODE BEGIN TIM2_IRQn 0 */
// HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_10);
// HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_11);
/*ąĮą░čćą░ą╗ąŠ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čüą║ąŠčĆąŠčüčéąĖ ąĮąĖąČąĄ 2 ą║ą╝/čćą░čü(ąĮą░ čüą╗čāčćą░ą╣ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ ąĘą░čģą▓ą░čéą░)*/
if (flag_test != 0)
{
counter_tim2++;
//ąĄčüą╗ąĖ ąĮą░čēąĄą╗ą║ą░ą╗ąĖ ą▒ąŠą╗ąĄąĄ 1 čüąĄą║
if(counter_tim2 > 28)
{
flag_tim2 = 1;
counter_tim2 = 0;
//SPEED_value = 0;
}
}
/*ą║ąŠąĮąĄčå ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čüą║ąŠčĆąŠčüčéąĖ ąĮąĖąČąĄ 2 ą║ą╝/čćą░čü*/
if(raznica < 40)
{
if (timerse < 12)
{
timerse++;
//flag_inc = 10;
htim4.Init.Period = timerse;
HAL_TIM_Base_Init(&htim4);
}
}
if(raznica > 40)
{
if (timerse > 1)
{
timerse--;
//flag_inc = 0;
htim4.Init.Period = timerse;
HAL_TIM_Base_Init(&htim4);
}
}
/* USER CODE END TIM2_IRQn 0 */
HAL_TIM_IRQHandler(&htim2);
/* USER CODE BEGIN TIM2_IRQn 1 */
/* USER CODE END TIM2_IRQn 1 */
}
/**
* @brief This function handles TIM3 global interrupt.
*/
void TIM3_IRQHandler(void)
{
/* USER CODE BEGIN TIM3_IRQn 0 */
/* USER CODE END TIM3_IRQn 0 */
HAL_TIM_IRQHandler(&htim3);
/* USER CODE BEGIN TIM3_IRQn 1 */
/* USER CODE END TIM3_IRQn 1 */
}
/**
* @brief This function handles TIM4 global interrupt.
*/
void TIM4_IRQHandler(void)
{
/* USER CODE BEGIN TIM4_IRQn 0 */
/*ąĘą░čģąŠą┤ąĖą╝ ą┐ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠą╗ąĮąŠą│ąŠ čłą░ą│ą░, ą║ąŠą│ą┤ą░ ąĮą░ ąĮąŠą│ąĄ STEP ą╗ąŠą│. "0"*/
if(flag_polarity == 0)
{
if(SPEED_value > Position)
{
//ąÆčĆą░čēąĄąĮąĖąĄ ą┐ąŠ čćą░čüąŠą▓ąŠą╣ DIR
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, GPIO_PIN_RESET);
raznica = SPEED_value - Position;
Position++; //ąĘą░ą┐ąŠą╝ąĖąĮą░ąĄą╝ ąĮąŠą▓ąŠąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ čüčéčĆąĄą╗ą║ąĖ
full_position_up = 1;
}
else
{
full_position_up = 0;//čäą╗ą░ą│ ąŠą║ąŠąĮčćą░ąĮąĖčÅ ą▓čŗčģąŠą┤ą░ ąĮą░ ą┐ąŠąĘąĖčåąĖčÄ ą┐ąŠ čćą░čüąŠą▓ąŠą╣
}
if(SPEED_value < Position)
{
//ąÆčĆą░čēąĄąĮąĖąĄ ą┐čĆąŠčéąĖą▓ čćą░čüąŠą▓ąŠą╣ DIR
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, GPIO_PIN_SET);
raznica = Position - SPEED_value;
Position--; //ąĘą░ą┐ąŠą╝ąĖąĮą░ąĄą╝ ąĮąŠą▓ąŠąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ čüčéčĆąĄą╗ą║ąĖ
full_position_dn = 1;
}
else
{
full_position_dn = 0;//čäą╗ą░ą│ ąŠą║ąŠąĮčćą░ąĮąĖčÅ ą▓čŗčģąŠą┤ą░ ąĮą░ ą┐ąŠąĘąĖčåąĖčÄ ą┐čĆąŠčéąĖą▓ čćą░čüąŠą▓ąŠą╣
}
}
//čłą░ą│ą░ąĄą╝ ą┐ąŠą║ą░ ąĮąĄ ą▓čŗą╣ą┤ąĄą╝ ąĮą░ ąĘą░ą┤ą░ąĮąĮčāčÄ ą┐ąŠąĘąĖčåąĖčÄ (ą║ą░ąČą┤čŗą╣ ąĘą░čģąŠą┤ ą╝ąĄąĮčÅąĄą╝ čüąŠčüč鹊čÅąĮąĖąĄ ąĮą░ ąĮąŠą│ąĄ STEP):
if((full_position_dn != 0)||(full_position_up != 0))
{
if(flag_polarity == 0)
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_6, GPIO_PIN_SET);
flag_polarity = 1;
}
else
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_6, GPIO_PIN_RESET);
flag_polarity = 0;
}
}
else
{
if(flag_test == 1)
{
htim4.Init.Period = 12;
HAL_TIM_Base_Init(&htim4);
}
}
/* USER CODE END TIM4_IRQn 0 */
HAL_TIM_IRQHandler(&htim4);
/* USER CODE BEGIN TIM4_IRQn 1 */
/* USER CODE END TIM4_IRQn 1 */
}
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
AndyBig
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÉą╗ą│ąŠčĆąĖčéą╝ ą┐ą╗ą░ą▓ąĮąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ čłą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé č乥ą▓ 13, 2018 10:36:56 |
|
| ąōčĆčŗąĘąĄčé ą║ą░ąĮąĖč乊ą╗čī |
|
ąÜą░čĆą╝ą░: -2
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 43
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čÅąĮą▓ 17, 2018 13:09:14
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 250
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąØčā ą▓ąŠąŠą▒čēąĄ ą╝ąŠąČąĮąŠ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ąĖčüčģąŠą┤ąĮąĖą║ąĖ č鹊ą│ąŠ ąČąĄ Marlin (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ 3D-ą┐čĆąĖąĮč鹥čĆą░ą╝ąĖ) ąĖą╗ąĖ LinuxCNC. ąóą░ą╝ ą▓čüąĄ čŹč鹊 (ąĖ ą╝ąĮąŠą│ąŠąĄ ą┤čĆčāą│ąŠąĄ) ąĄčüčéčī.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
xoxa
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÉą╗ą│ąŠčĆąĖčéą╝ ą┐ą╗ą░ą▓ąĮąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ čłą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čüąĄąĮ 16, 2020 08:58:55 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą╝ą░čĆ 23, 2011 18:33:44
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 5
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąØą░ą┤ąŠ, ąĮą░ą▓ąĄčĆąĮąŠąĄ, ą║ąŠą┐ą░čéčī ą▓ čüč鹊čĆąŠąĮčā č乊čĆą╝čāą╗čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čĆą░čüčüč鹊čÅąĮąĖčÅ ą┐čĆąĖ čĆą░ą▓ąĮąŠčāčüą║ąŠčĆąĄąĮąĮąŠą╝ ą┤ą▓ąĖąČąĄąĮąĖąĖ: ... ... ą×čé ą║čāą┤ą░ čéą░ą║ąĖąĄ ą║ą░čĆčéąĖąĮą║ąĖ ? ąÜą░ą║ąŠą╣ čŹč鹊 čüąŠčäčé ?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Ivanoff-iv
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÉą╗ą│ąŠčĆąĖčéą╝ ą┐ą╗ą░ą▓ąĮąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ čłą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čüąĄąĮ 16, 2020 12:55:07 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2030
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ąĮąŠčÅ 11, 2016 05:48:09
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6619
ą×čéą║čāą┤ą░: ąĪąĄčĆą┤čåąĄ ą¤ą░čĆą╝čŗ
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
")
|
ą▓čüčæ ąŠč湥ąĮčī ą┐čĆąŠčüč鹊 čĆą░ąĘą│ąŠąĮ: V=a*t; if (V>Vmax) V=Vmax; č鹊čĆą╝ąŠąČąĄąĮąĖąĄ: čüą╝ąŠčéčĆąĖ č乊čĆą╝čāą╗čā ą┐čāčéąĖ ą┤ąŠ ąŠčüčéą░ąĮąŠą▓ą║ąĖ ą┐čĆąĖ čĆą░ą▓ąĮąŠąĘą░ą╝ąĄą┤ą╗ąĄąĮąĮąŠą╝ ą┤ą▓ąĖąČąĄąĮąĖąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ ą▓čŗčüąŠčéčŗ ą┐ąŠą┤ą▒čĆąŠčłąĄąĮąĮąŠą│ąŠ ą▓ą▓ąĄčĆčģ ą║ą░ą╝ąĮčÅ) ąĖąĘ č乊čĆą╝čāą╗čŗ ą▓čŗčĆą░ąČą░ą╣ čüą║ąŠčĆąŠčüčéčī, ą┤ą░ą╗čīčłąĄ ą║ą░ą║ ąĖ ą┐čĆąĖ čĆą░ąĘą│ąŠąĮąĄ ąĄčüą╗ąĖ čüą║ąŠčĆąŠčüčéčī ą┐ąŠą╗čāčćąĖą╗ą░čüčī ą▒ąŠą╗čīčłąĄ, č湥ą╝ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčÅ - ąĖčüą┐ąŠą╗čīąĘčāą╣ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ, ąĄčüą╗ąĖ ą╝ąĄąĮčīčłąĄ - ąĖčüą┐ąŠą╗čīąĘčāą╣ ą┐ąŠą╗čāč湥ąĮąĮčāčÄ. ą¤.ąĪ. čŹčéąĖ čéčĆąĖ čāčüą╗ąŠą▓ąĖčÅ (čĆą░ąĘą│ąŠąĮ, ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ, č鹊čĆą╝ąŠąČąĄąĮąĖąĄ) čüąŠą▒ąĄčĆąĖ ą▓ ąŠą┤ąĮčā čäčāąĮą║čåąĖčÄ čé.ą║. ą┐čĆąĖ ą║ąŠčĆąŠčéą║ąŠą╝ ą┐čāčéąĖ č鹊čĆą╝ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ ąĄčēčæ ą┤ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÅ čĆą░ąĘą│ąŠąĮą░. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 1 minute 38 seconds:Re: ąÉą╗ą│ąŠčĆąĖčéą╝ ą┐ą╗ą░ą▓ąĮąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ čłą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗čÅąŠčģ, čæ... ąŠą┐čÅčéčī ą│ąŠą▓ąĮąŠ ą╝ą░ą╝ąŠąĮčéą░ ą▓čŗčĆčŗą╗ąĖ...
_________________
ą¤čĆąŠčüč鹊 ąĮąĄ čāčćąĖ čäąĖąĘąĖą║čā ą▓ čłą║ąŠą╗ąĄ, ąĖ ą▓čüčÅ čéą▓ąŠčÅ ąČąĖąĘąĮčī ą▒čāą┤ąĄčé ąĮą░ą┐ąŠą╗ąĮąĄąĮą░ čćčāą┤ąĄčüą░ą╝ąĖ ąĖ ą▓ąŠą╗čłąĄą▒čüčéą▓ąŠą╝
ąæąĄąĘą│čĆą░ą╝ąŠčéąĮąŠ ą▓ąŠą┐čĆąŠčłą░čÄčēąĖą╝ ą┐čĆąŠ čüąĖą╗ąŠą▓čāčÄ ąĖą╗ąĖ ą▓čŗčüąŠą║ąŠą▓ąŠą╗čīčéąĮčāčÄ čŹą╗ąĄą║čéčĆąŠąĮąĖą║čā čÅ ąĮąĄ ąŠčéą▓ąĄčćą░čÄ, ą░ č鹊 ąĄčēčæ ą┐ąŠčüą░ą┤čÅčé ąĘą░ čāčćą░čüčéąĖąĄ ą▓ (čüą░ą╝ąŠ)čāą▒ąĖąĄąĮąĖąĖ ąŠą▒ąŠą╗čéčāčüą░...
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
xoxa
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÉą╗ą│ąŠčĆąĖčéą╝ ą┐ą╗ą░ą▓ąĮąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ čłą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čüąĄąĮ 16, 2020 14:03:31 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą╝ą░čĆ 23, 2011 18:33:44
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 5
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąŁč鹊 čÅ ą║ąŠą┐ą░č鹥ą╗čī
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Eddy_Em
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÉą╗ą│ąŠčĆąĖčéą╝ ą┐ą╗ą░ą▓ąĮąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ čłą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čüąĄąĮ 16, 2020 15:02:00 |
|
| ąĪąŠą▒čāčéčŗą╗čīąĮąĖą║ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: -12
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: -25
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ąĖčÄą╗ 12, 2019 22:52:01
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2525
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąöąĄą╗ą░ą╗ ą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĖ ą┐ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÄ čéą░ą╣ą╝ąĄčĆą░, ą│ąĄąĮąĄčĆąĖčĆčāčÄčēąĄą│ąŠ ą╝ąĄą░ąĮą┤čĆ: ą┐čĆąŠčüč鹊 ą┐čĆąŠą▓ąĄčĆčÅąĄčéčüčÅ ąÜąÉ čüąŠčüč鹊čÅąĮąĖčÅ, ąĖ ąĄčüą╗ąĖ ąĮą░ą┤ąŠ, ą▓ ARR ą┤ąŠą▒ą░ą▓ą╗čÅąĄčéčüčÅ ąĖą╗ąĖ ą▓čŗčćąĖčéą░ąĄčéčüčÅ ą┐ąŠčüč鹊čÅąĮąĮą░čÅ ą▓ąĄą╗ąĖčćąĖąĮą░. ąØą░ ą│ąĖčéčģą░ą▒ąĄ čā ą╝ąĄąĮčÅ ą▓ą░ą╗čÅąĄčéčüčÅ ą║ąŠą┤ - ą▓ąĘčÅčéčī č鹊čé ąČąĄ č乊č鹊ą╝ąĄčéčĆ MMPP.
_________________
Linux rules! Windows must die. ąŚą┤čĆą░ą▓ąŠą╝čŗčüą╗čÅčēąĖą╣ č湥ą╗ąŠą▓ąĄą║ ą┤ąŠą▒čĆąŠą▓ąŠą╗čīąĮąŠ ą▒čāą┤ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╝ą░čüčéą┤ą░ąĄą╝ ą╗ąĖčłčī ą▓ ą┤ą▓čāčģ čüą╗čāčćą░čÅčģ: ą┐ąŠą┤ ą┤čāą╗ąŠą╝ ą░ą▓č鹊ą╝ą░čéą░ ąĖą╗ąĖ ą┐ąŠą┤ ą▓ą╗ąĖčÅąĮąĖąĄą╝ ą░ąĮą░ą╗čīąĮąŠą│ąŠ ąĘąŠąĮą┤ą░.
ą» ąĮą░ ą│ąĖčéčģą░ą▒ąĄ, ą▓ ą¢ą¢
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
xoxa
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÉą╗ą│ąŠčĆąĖčéą╝ ą┐ą╗ą░ą▓ąĮąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ čłą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čüąĄąĮ 16, 2020 15:28:10 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą╝ą░čĆ 23, 2011 18:33:44
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 5
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąöąĄą╗ą░ą╗ ą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĖ ą┐ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÄ čéą░ą╣ą╝ąĄčĆą░, ą│ąĄąĮąĄčĆąĖčĆčāčÄčēąĄą│ąŠ ą╝ąĄą░ąĮą┤čĆ: ą┐čĆąŠčüč鹊 ą┐čĆąŠą▓ąĄčĆčÅąĄčéčüčÅ ąÜąÉ čüąŠčüč鹊čÅąĮąĖčÅ, ąĖ ąĄčüą╗ąĖ ąĮą░ą┤ąŠ, ą▓ ARR ą┤ąŠą▒ą░ą▓ą╗čÅąĄčéčüčÅ ąĖą╗ąĖ ą▓čŗčćąĖčéą░ąĄčéčüčÅ ą┐ąŠčüč鹊čÅąĮąĮą░čÅ ą▓ąĄą╗ąĖčćąĖąĮą░. ąØą░ ą│ąĖčéčģą░ą▒ąĄ čā ą╝ąĄąĮčÅ ą▓ą░ą╗čÅąĄčéčüčÅ ą║ąŠą┤ - ą▓ąĘčÅčéčī č鹊čé ąČąĄ č乊č鹊ą╝ąĄčéčĆ MMPP. ąĮą░ą┤ąŠ ą▒čŗ ą▓ ąŠą┤ąĮąŠą╝ čéą░ą╣ą╝ąĄčĆąĄ čüčĆą░ąĘčā ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ ą┤ą▓ąĖą│ą░č鹥ą╗čÅą╝ąĖ čāą┐čĆą░ą▓ą╗čÅčéčī
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Eddy_Em
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÉą╗ą│ąŠčĆąĖčéą╝ ą┐ą╗ą░ą▓ąĮąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ čłą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čüąĄąĮ 16, 2020 15:54:28 |
|
| ąĪąŠą▒čāčéčŗą╗čīąĮąĖą║ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: -12
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: -25
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ąĖčÄą╗ 12, 2019 22:52:01
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2525
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ą×ą┤ąĮąĖą╝ čéą░ą╣ą╝ąĄčĆąŠą╝ ąĮąĄą▓ąŠąĘą╝ąŠąČąĮąŠ: ąĮąĄ ą┐ąŠą╗čāčćąĖčéčüčÅ čĆą░ąĘą│ąŠąĮčÅčéčī ąĖ č鹊čĆą╝ąŠąĘąĖčéčī. ąĪčéčĆąŠą│ąŠ ą┐ąŠ čéą░ą╣ą╝ąĄčĆčā ąĮą░ ą┤ą▓ąĖąČąŠą║.
_________________
Linux rules! Windows must die. ąŚą┤čĆą░ą▓ąŠą╝čŗčüą╗čÅčēąĖą╣ č湥ą╗ąŠą▓ąĄą║ ą┤ąŠą▒čĆąŠą▓ąŠą╗čīąĮąŠ ą▒čāą┤ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╝ą░čüčéą┤ą░ąĄą╝ ą╗ąĖčłčī ą▓ ą┤ą▓čāčģ čüą╗čāčćą░čÅčģ: ą┐ąŠą┤ ą┤čāą╗ąŠą╝ ą░ą▓č鹊ą╝ą░čéą░ ąĖą╗ąĖ ą┐ąŠą┤ ą▓ą╗ąĖčÅąĮąĖąĄą╝ ą░ąĮą░ą╗čīąĮąŠą│ąŠ ąĘąŠąĮą┤ą░.
ą» ąĮą░ ą│ąĖčéčģą░ą▒ąĄ, ą▓ ą¢ą¢
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
xoxa
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÉą╗ą│ąŠčĆąĖčéą╝ ą┐ą╗ą░ą▓ąĮąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ čłą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čüąĄąĮ 16, 2020 16:07:07 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą╝ą░čĆ 23, 2011 18:33:44
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 5
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąØąĄ ąĮą░ą┤ąŠ čéą░ą║ ą║ą░č鹥ą│ąŠčĆąĖčćąĮąŠ. Marlin, grbl ąĮąĄ čéčĆą░čéčÅčé ą┐ąŠ čéą░ą╣ą╝ąĄčĆčā ąĮą░ ą┤ą▓ąĖą│ą░č鹥ą╗čī ąĖ čĆą░ą▒ąŠčéą░čÄčé. ąöą░ąČąĄ čü 6 ą┤ą▓ąĖą│ą░č鹥ą╗čÅą╝ąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Eddy_Em
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÉą╗ą│ąŠčĆąĖčéą╝ ą┐ą╗ą░ą▓ąĮąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ čłą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čüąĄąĮ 16, 2020 16:14:02 |
|
| ąĪąŠą▒čāčéčŗą╗čīąĮąĖą║ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: -12
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: -25
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ąĖčÄą╗ 12, 2019 22:52:01
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2525
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ą¤ąŠč鹊ą╝čā ą║ą░ą║ ąĮą░ą┐ąĖčüą░ąĮčŗ čłą║ąŠą╗čīąĮąĖą║ą░ą╝ąĖ ąĘą░ ąĄą┤čā! ą¦ąĄčĆąĄąĘ ąŠą┤ąĮąŠ ą╝ąĄčüč鹊...
ąĪč鹊ą┐čāą┤ąŠą▓ąŠ, čéą░ą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ čéčāą┐čŗą╝ ąĮąŠą│ąŠą┤čĆčŗą│ąŠą╝. ąś ąĄčüą╗ąĖ ąŠą┤ąĖąĮ ą┤ą▓ąĖą│ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ą┤ąĄą╗ą░čéčī 2000 čłą░ą│ąŠą▓ ą▓ čüąĄą║čāąĮą┤čā, ą░ ą▓č鹊čĆąŠą╣ - 0.03, ąĮąĖč湥ą│ąŠ ąĮąĄ ą▓čŗą╣ą┤ąĄčé...
_________________
Linux rules! Windows must die. ąŚą┤čĆą░ą▓ąŠą╝čŗčüą╗čÅčēąĖą╣ č湥ą╗ąŠą▓ąĄą║ ą┤ąŠą▒čĆąŠą▓ąŠą╗čīąĮąŠ ą▒čāą┤ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╝ą░čüčéą┤ą░ąĄą╝ ą╗ąĖčłčī ą▓ ą┤ą▓čāčģ čüą╗čāčćą░čÅčģ: ą┐ąŠą┤ ą┤čāą╗ąŠą╝ ą░ą▓č鹊ą╝ą░čéą░ ąĖą╗ąĖ ą┐ąŠą┤ ą▓ą╗ąĖčÅąĮąĖąĄą╝ ą░ąĮą░ą╗čīąĮąŠą│ąŠ ąĘąŠąĮą┤ą░.
ą» ąĮą░ ą│ąĖčéčģą░ą▒ąĄ, ą▓ ą¢ą¢
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Ivanoff-iv
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÉą╗ą│ąŠčĆąĖčéą╝ ą┐ą╗ą░ą▓ąĮąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ čłą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čüąĄąĮ 16, 2020 16:32:50 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2030
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ąĮąŠčÅ 11, 2016 05:48:09
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6619
ą×čéą║čāą┤ą░: ąĪąĄčĆą┤čåąĄ ą¤ą░čĆą╝čŗ
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
|
čłą░ą│ąŠą▓ąĖą║ąĖ (čüč鹥ą┐-ą┤ąĖčĆ) ŌĆö ą╝ąŠąČąĮąŠ čüąŠą▒čĆą░čéčī čüąŠčäčé-čéą░ą╣ą╝ąĄčĆ ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čłčéčāą║ ąĮą░ 1 čéą░ą╣ą╝ąĄčĆ... ą╝ą░ą║čü. ąŠą▒ąŠčĆąŠčéčŗ ą▒čāą┤čāčé ą╝ąĄąĮčīčłąĄ, č湥ą╝ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ (ąĖ ą┤ąČąĖčéč鹥čĆ ą▒ąŠą╗čīčłąĄ, ąŠčüąŠą▒ąĄąĮąĮąŠ ąĮą░ ą▒ąŠą╗čīčłąĖčģ ąŠą▒ąŠčĆąŠčéą░čģ)..., ąĮąŠ č鹊ąČąĄ ą▓ą┐ąŠą╗ąĮąĄ čüąĮąŠčüąĮąŠ... ą┐ąŠ ą║čĆą░ą╣ąĮąĄą╣ ą╝ąĄčĆąĄ 200 ąĖ 0,03 čĆą░ąĘąŠą╝ ą▒ąĄąĘ ą┐čĆąŠą▒ą╗ąĄą╝...
_________________
ą¤čĆąŠčüč鹊 ąĮąĄ čāčćąĖ čäąĖąĘąĖą║čā ą▓ čłą║ąŠą╗ąĄ, ąĖ ą▓čüčÅ čéą▓ąŠčÅ ąČąĖąĘąĮčī ą▒čāą┤ąĄčé ąĮą░ą┐ąŠą╗ąĮąĄąĮą░ čćčāą┤ąĄčüą░ą╝ąĖ ąĖ ą▓ąŠą╗čłąĄą▒čüčéą▓ąŠą╝
ąæąĄąĘą│čĆą░ą╝ąŠčéąĮąŠ ą▓ąŠą┐čĆąŠčłą░čÄčēąĖą╝ ą┐čĆąŠ čüąĖą╗ąŠą▓čāčÄ ąĖą╗ąĖ ą▓čŗčüąŠą║ąŠą▓ąŠą╗čīčéąĮčāčÄ čŹą╗ąĄą║čéčĆąŠąĮąĖą║čā čÅ ąĮąĄ ąŠčéą▓ąĄčćą░čÄ, ą░ č鹊 ąĄčēčæ ą┐ąŠčüą░ą┤čÅčé ąĘą░ čāčćą░čüčéąĖąĄ ą▓ (čüą░ą╝ąŠ)čāą▒ąĖąĄąĮąĖąĖ ąŠą▒ąŠą╗čéčāčüą░...
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
xoxa
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÉą╗ą│ąŠčĆąĖčéą╝ ą┐ą╗ą░ą▓ąĮąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ čłą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čüąĄąĮ 16, 2020 19:38:21 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą╝ą░čĆ 23, 2011 18:33:44
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 5
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą¤ąŠč鹊ą╝čā ą║ą░ą║ ąĮą░ą┐ąĖčüą░ąĮčŗ čłą║ąŠą╗čīąĮąĖą║ą░ą╝ąĖ ąĘą░ ąĄą┤čā! ą¦ąĄčĆąĄąĘ ąŠą┤ąĮąŠ ą╝ąĄčüč鹊...
ąĪč鹊ą┐čāą┤ąŠą▓ąŠ, čéą░ą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ čéčāą┐čŗą╝ ąĮąŠą│ąŠą┤čĆčŗą│ąŠą╝. ąś ąĄčüą╗ąĖ ąŠą┤ąĖąĮ ą┤ą▓ąĖą│ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ą┤ąĄą╗ą░čéčī 2000 čłą░ą│ąŠą▓ ą▓ čüąĄą║čāąĮą┤čā, ą░ ą▓č鹊čĆąŠą╣ - 0.03, ąĮąĖč湥ą│ąŠ ąĮąĄ ą▓čŗą╣ą┤ąĄčé... ą▓ąŠčé ąŠąĮ ąŠą▒ čŹč鹊ą╝ ąĮąĄ ąĘąĮą░ą╗ ąĖ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī: http://easyelectronics.ru/upravlenie-mn ... hinok.html
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
bmv89
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąÉą╗ą│ąŠčĆąĖčéą╝ ą┐ą╗ą░ą▓ąĮąŠą│ąŠ čĆą░ąĘą│ąŠąĮą░ ąĖ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ čłą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé čÅąĮą▓ 20, 2023 18:14:53 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé čÅąĮą▓ 20, 2023 18:03:28
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąöąŠą▒čĆčŗą╣ ą┤ąĄąĮčī! ą¤ąŠą╝ąŠą│ąĖč鹥 ą┐ąŠąĮčÅčéčī ą┐čĆąĖąĮčåąĖą┐ (ą░ą╗ą│ąŠčĆąĖčéą╝) čĆą░ą▒ąŠčéčŗ ą╗ąĖąĮąĄą╣ąĮąŠą│ąŠ ąĖąĮč鹥čĆą┐ąŠą╗čÅč鹊čĆą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┤ą▓čāčģąŠčüąĄą▓ąŠą│ąŠ čćą┐čā. ą¤čŗčéą░ą╗čüčÅ ąĖąĘčāčćąĖčéčī ąĖčüčģąŠą┤ąĮąĖą║ąĖ marlin ąĖ grbl (čäą░ą╣ą╗čŗ stepper.c ąĖ stepper.h), ąĮąŠ ą╝ą░ą╗ąŠ č湥ą│ąŠ čģąŠčĆąŠčłąĄą│ąŠ ąĖąĘ čŹč鹊ą│ąŠ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī. ąÆ ąŠą▒čēąĄą╝ ą┐čĆąĖčłą╗ąŠčüčī ąĖąĘąŠą▒čĆąĄčéą░čéčī čüą▓ąŠą╣ ą▓ąĄą╗ąŠčüąĖą┐ąĄą┤ čü ąĮčāą╗čÅ. ąÆ čäą░ą╣ą╗ąĄ stepper.c ą▓ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖčÅčģ ą░ą▓č鹊čĆčŗ ą┐čĆąĖą▓ąŠą┤čÅčé ą║čĆą░čéą║ąŠąĄ ą┐ąŠčÅčüąĮąĄąĮąĖąĄ ą┐čĆąĖąĮčåąĖą┐ą░ čĆą░ą▒ąŠčéčŗ ąĖąĮč鹥čĆą┐ąŠą╗čÅč鹊čĆą░ (čüą║čĆąĖąĮ ą▓ąŠ ą▓ą╗ąŠąČąĄąĮąĖąĖ), ąĮąŠ čŹč鹊ą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą╝ąĮąĄ ąĮąĄ čģą▓ą░čéąĖą╗ąŠ ą┤ą╗čÅ ą┐ąŠą╗ąĮąŠą│ąŠ ą┐ąŠąĮąĖą╝ą░ąĮąĖčÅ.
ąĪą┤ąĄą╗ą░ą╗ čüą▓ąŠčÄ ą┐čĆąŠčüč鹥ąĮčīą║čāčÄ čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ, ą║ąŠč鹊čĆą░čÅ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą║ą░ąČą┤čŗą╣ ą║ą░ą┤čĆ (ą║ą░ąČą┤čāčÄ ą║ąŠą╝ą░ąĮą┤čā G0/G1) ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ą┐čĆąĄą┤čłąĄčüčéą▓čāčÄčēąĖčģ ąĖ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ ą║ąŠą╝ą░ąĮą┤ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ (G0/G1). ą¤ąŠą╗čāčćąĖą╗ąŠčüčī, čćč鹊 ą║ą░ąČą┤ąŠąĄ ą╗ąĖąĮąĄą╣ąĮąŠąĄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ąĮčāą╗ąĄą▓ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą┐ąŠ ąŠą▒ąĄąĖą╝ ąŠčüčÅą╝ ąĖ ąĘą░ą║ą░ąĮčćąĖą▓ą░ąĄčéčüčÅ ąĮčāą╗ąĄą▓ąŠą╣ čüą║ąŠčĆąŠčüčéčīčÄ. ążąŠčĆą╝ą░ ą│čĆą░čäąĖą║ą░ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ čüą║ąŠčĆąŠčüčéąĖ ą┐ąŠ ąŠčéą┤ąĄą╗čīąĮąŠą╣ ąŠčüąĖ ąŠčé ą▓čĆąĄą╝ąĄąĮąĖ čéčĆą░ą┐ąĄčåąĄąĖą┤ą░ą╗čīąĮą░čÅ (ąĄčüą╗ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ąŠčüčéą░č鹊čćąĮąŠ ą┤ą╗čÅ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ ąĘą░ą┤ą░ąĮąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ąŠą┤ąĮąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ G0/G1), ą╗ąĖą▒ąŠ čĆą░ą▓ąĮąŠą▒ąĄą┤čĆąĄąĮąĮčŗą╣ čéčĆąĄčāą│ąŠą╗čīąĮąĖą║ (ąĄčüą╗ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ąĮąĄ ą┤ąŠčüčéą░č鹊čćąĮąŠ ą┤ą╗čÅ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ ąĘą░ą┤ą░ąĮąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ąŠą┤ąĮąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ G0/G1). ąÆčĆąĄą╝čÅ ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čłą░ą│ąŠą▓ ąĮą░ čāčüą║ąŠčĆąĄąĮąĖąĄ ąĖ ąĘą░ą╝ąĄą┤ą╗ąĄąĮąĖąĄ ą┤ą╗čÅ ąŠčéą┤ąĄą╗čīąĮąŠą╣ ąŠčüąĖ ą▓čüąĄą│ą┤ą░ ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠąĄ. ąØąŠ ą┐čĆąĖ čéą░ą║ąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąŠč湥ąĮčī ąĮąĄčŹčäč乥ą║čéąĖą▓ąĮąŠ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą║čĆąĖą▓čŗčģ čéčĆą░ąĄą║č鹊čĆąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĄąŠą▒čĆą░ąĘčāčÄčéčüčÅ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą╝ g-ą║ąŠą┤ą░ ą▓ ą▒ąŠą╗čīčłąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą╝ąĄą╗ą║ąĖčģ ą╗ąĖąĮąĄą╣ąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖą╣.
ą¤ąŠąĮčÅčéąĮąŠ, čćč鹊 ąĮčāąČąĮąŠ ą║ą░ą║-č鹊 čāčćąĖčéčŗą▓ą░čéčī ą┐ąŠčüą╗ąĄą┤čāčÄčēčāčÄ ą║ąŠą╝ą░ąĮą┤čā G0/G1 ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą║ąŠąĮąĄčćąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ č鹥ą║čāčēąĄą│ąŠ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ. ąś ąĮą░čćąĖąĮą░čéčī ą║ą░ąČą┤ąŠąĄ ąĮąŠą▓ąŠąĄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ čü ąĮčāą╗ąĄą▓ąŠą╣ čüą║ąŠčĆąŠčüčéčīčÄ ąĮąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ, ąĄčüą╗ąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čéčĆą░ąĄą║č鹊čĆąĖąĖ ą┤ą▓ąĖąČąĄąĮąĖčÅ ąĮąĄ čüčāčēąĄčüčéą▓ąĄąĮąĮąŠąĄ. ąØąŠ ą▓ąĄą┤čī, ą┐ąŠą╗čāčćą░ąĄčéčüčÅ, čćč鹊 ą┐čĆąĖ ąŠą▒čüčćčæč鹥 ąŠą┤ąĮąŠą│ąŠ ą║ą░ą┤čĆą░ (ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ ąĮą░čćą░ą╗čīąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ, ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čłą░ą│ąŠą▓ ąĮą░ čāčüą║ąŠčĆąĄąĮąĖąĄ, ą║ąŠą╗ąĖč湥čüčéą▓ą░ čłą░ą│ąŠą▓ ąĮą░ ąĘą░ą╝ąĄą┤ą╗ąĄąĮąĖąĄ, ą║ąŠąĮąĄčćąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ) ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čāčćąĖčéčŗą▓ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą║ą░ą┤čĆąŠą▓ ą┐čĆąĄą┤čłąĄčüčéą▓čāčÄčēąĖčģ ąĖ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖą╣ ą║ą░ą┤čĆ. ąÆąĄą┤čī ąĮąĄ čäą░ą║čé, čćč鹊 ąĘą░ 1 ąĖą╗ąĖ 2 ą╗ąĖąĮąĄą╣ąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ čāą┤ą░čüčéčüčÅ ą┤ąŠčüčéąĖčćčī ąĘą░ą┤ą░ąĮąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ, ą░ ąĘą░ą╝ąĄą┤ą╗čÅčéčüčÅ ą┐ąŠč鹊ą╝ (ą╝ąŠąČąĄčé čéą░ą║ čüą╗čāčćąĖčéčüčÅ) ą┐čĆąĖą┤čæčéčüčÅ čéą░ą║ąČąĄ ą▓ č鹥č湥ąĮąĖąĖ ąĮąĄ ąŠą┤ąĮąŠą│ąŠ ą║ą░ą┤čĆą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ ąŠčéčĆąĖčüąŠą▓ą║ą░ ąŠą║čĆčāąČąĮąŠčüčéąĖ ąĖą╗ąĖ ą┤čāą│ąĖ ąĖą╗ąĖ ą┤ą░ąČąĄ ą┐čĆąŠčüč鹊ą╣ ą┐čĆčÅą╝ąŠą╣, ąĮąŠ čüąŠčüč鹊čÅčēąĄą╣ ąĖąĘ ąŠčéą┤ąĄą╗čīąĮčŗčģ ą║ąŠą╗ą╗ąĖąĮąĄą░čĆąĮčŗčģ ąŠčéčĆąĄąĘą║ąŠą▓ ą╝ą░ą╗ąŠą╣ ą┤ą╗ąĖąĮčŗ).
ąÆ ąŠą┐ąĖčüą░ąĮąĖąĖ ą▓ čäą░ą╣ą╗ąĄ stepper.c čéčĆą░ą┐ąĄčåąĖčÅ ąŠą▒ąŠąĘąĮą░čćą░ąĄčéčüčÅ, ą║ą░ą║ BLOCK. ą¦č鹊 ą░ą▓č鹊čĆčŗ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░čÄčé ą┐ąŠą┤ BLOCK? ą×čéą┤ąĄą╗čīąĮčŗą╣ ą║ą░ą┤čĆ (ą║ąŠą╝ą░ąĮą┤čā G0/G1), ąĖą╗ąĖ ąĮą░ą▒ąŠčĆ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą║ą░ą┤čĆąŠą▓? ąöą╗čÅ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ ą║ąŠąĮą▓ąĄą╣ąĄčĆą░ čÅą▓ąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▒čāč乥čĆ ą║ąŠą╝ą░ąĮą┤ 菹╗ąĄą╝ąĄąĮčéą░čĆąĮčŗčģ ą╗ąĖąĮąĄą╣ąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖą╣, ą┐ąŠą║ą░ ąĖčüą┐ąŠą╗ąĮčÅčÄčéčüčÅ ą║ąŠą╝ą░ąĮą┤čŗ ąĖąĘ ąŠą┤ąĮąŠą╣ ąĄą│ąŠ ą┐ąŠą╗ąŠą▓ąĖąĮčŗ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖąĄ ą▓č鹊čĆąŠą╣ ą┐ąŠą╗ąŠą▓ąĖąĮčŗ (ąĖąĘ COM ą┐ąŠčĆčéą░, SD ą║ą░čĆčéčŗ ąĖą╗ąĖ ąĄčēčæ ąŠčéą║čāą┤ą░...). ąś čŹč鹊čé ą▒čāč乥čĆ, čÅą▓ąĮąŠ, ą▓ą╝ąĄčēą░ąĄčé ąĮąĄ ą▒ąŠą╗čīčłąĄ 100-500 ą║ąŠą╝ą░ąĮą┤. ą¦č鹊 ąĄčüą╗ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ąŠą╝ą░ąĮą┤ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą▓ BLOCK ą▒čāą┤ąĄčé (ą▓ ą║ą░ą║ąĖčģ-č鹊 čüą╗čāčćą░čÅčģ) ą┐čĆąĄą▓čŗčłą░čéčī čæą╝ą║ąŠčüčéčī ą▒čāč乥čĆą░ ą║ąŠą╝ą░ąĮą┤? ąśą╗ąĖ (ąĄčēčæ ą▒ąŠą╗ąĄąĄ čĆąĄą░ą╗čīąĮą░čÅ čüąĖčéčāą░čåąĖčÅ) ąĮą░čćą░ą╗ąŠ BLOCKą░ ą┐ąŠą┐ą░ą┤čæčé ąĮą░ ąŠą┤ąĮčā ą┐ąŠą╗ąŠą▓ąĖąĮčā ą▒čāč乥čĆą░, ą░ ą║ąŠąĮąĄčå ąĮą░ ą┤čĆčāą│čāčÄ ą┐ąŠą╗ąŠą▓ąĖąĮčā, č鹊ą│ą┤ą░ čā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą▓ąŠąŠą▒čēąĄ ąĮąĄ ą▒čāą┤ąĄčé ąĄą┤ąĖąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą║ąŠ ą▓čüąĄą╝ ą║ą░ą┤čĆą░ą╝ ą┤ą░ąĮąĮąŠą│ąŠ BLOCKą░. ąÆ ąŠą▒čēąĄą╝ ąĮąĄ ą╝ąŠą│čā ą┐ąŠąĮčÅčéčī čüą░ą╝čā ąĖą┤ąĄčÄ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą╗ąĖąĮąĄą╣ąĮąŠą│ąŠ ąĖąĮč鹥čĆą┐ąŠą╗čÅč鹊čĆą░ ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ.
| ąÆą╗ąŠąČąĄąĮąĖčÅ: |
 img.jpg [119.41 KiB]
img.jpg [119.41 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 83
|
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
|
ąĪčéčĆą░ąĮąĖčåą░ 1 ąĖąĘ 1
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 19 ] |
|
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ |
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: ąĮąĄčé ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ ąĖ ą│ąŠčüčéąĖ: 23 |
|
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ
|

|
|










