ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - CAN ą░ą┤ą░ą┐č鹥čĆ ą┤ą╗čÅ čĆčāą╗ąĄą▓čŗčģ ą║ąĮąŠą┐ąŠą║ VW Polo Sedan
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
ąĪčéčĆą░ąĮąĖčåą░ 4 ąĖąĘ 6
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 106 ]
, , , , ,
ąÉą▓č鹊čĆ
ąĪąŠąŠą▒čēąĄąĮąĖąĄ
bratec_bober
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: CAN ą░ą┤ą░ą┐č鹥čĆ ą┤ą╗čÅ čĆčāą╗ąĄą▓čŗčģ ą║ąĮąŠą┐ąŠą║ VW Polo Sedan
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ąĮąŠčÅ 08, 2015 19:16:49
ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā!
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čüąĄąĮ 26, 2012 18:25:30ąĪąŠąŠą▒čēąĄąĮąĖą╣: 23
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą¤ąŠą┐čĆąŠą▒ąŠą▓ą░ą╗ čéą▓ąŠą╣ ą║ąŠą┤ ąĘą░ą┐ąĖčģą░čéčī ą▓ ą┐čĆąŠą│čā - ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé(( ąś ąĄčüą╗ąĖ ąŠčüčéą░ą▓ą╗čÅčéčī čćą░čüčéčī čü while(1) ąĖąĘ čåąĖą║ą╗ą░ ąĮąĄ ą▓čŗčģąŠą┤ąĖčé.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
Mishany
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: CAN ą░ą┤ą░ą┐č鹥čĆ ą┤ą╗čÅ čĆčāą╗ąĄą▓čŗčģ ą║ąĮąŠą┐ąŠą║ VW Polo Sedan
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ąĮąŠčÅ 08, 2015 20:09:29
ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖą╣ ą║ąŠčé
ąÜą░čĆą╝ą░: 8
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 128
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄąĮ 20, 2013 00:00:58ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1031ą×čéą║čāą┤ą░: ą╝ąŠčüą║ą▓ą░, ą╝.ąĪčģąŠą┤ąĮąĄąĮčüą║ą░čÅ
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą░ č鹊čćąĮąŠ! ąĖąĮą▓ąĄčĆčéąĖčĆąŠą▓ą░ąĮčŗą╣ ą░ą┤čĆąĄčü.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
bratec_bober
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: CAN ą░ą┤ą░ą┐č鹥čĆ ą┤ą╗čÅ čĆčāą╗ąĄą▓čŗčģ ą║ąĮąŠą┐ąŠą║ VW Polo Sedan
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ąĮąŠčÅ 08, 2015 20:35:31
ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā!
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čüąĄąĮ 26, 2012 18:25:30ąĪąŠąŠą▒čēąĄąĮąĖą╣: 23
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĮąĄ ą║ą░ąČąĄčéčüčÅ, ąĮąĖč湥ą│ąŠ ąĮąĄ ą▒čāą┤ąĄčé, ą┐ąŠ ą║čĆą░ą╣ąĮąĄą╣ ą╝ąĄčĆąĄ ą▓ ą░čĆą┤čāąĖąĮąŠ ą║ąŠą┤ąĄ. ąóą░ą╝ čüą╝čŗčüą╗ čéą░ą║ąŠą╣, čćč鹊 ą┐ąŠą║ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠą║ąŠąĮčćą░č鹥ą╗čīąĮąŠ ąĮąĄ ąŠą▒čĆą░ą▒ąŠčéą░ąĄčéčüčÅ (ąĮąĄ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą╗ąĄąĮ ąśąÜ-ą║ąŠą┤), čüą╗ąĄą┤čāčÄčēąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĮąĄ ą▒čāą┤ąĄčé ą┐ąŠą╗čāč湥ąĮąŠ. ąÆ ą║ą░č湥čüčéą▓ąĄ ą┐čĆąĖą╝ąĄčĆą░ ąĖąĘ ą┐čĆąŠčłą╗ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ čü ą╗ąĖčüčéąĖąĮą│ąŠą╝ ą║ą░ąĮ ą┐ą░ą║ąĄč鹊ą▓, ą┐čĆąĖ ąĮą░ąČą░čéąĖąĖ ą║ąĮąŠą┐ą║ąĖ ą┐čĆąĖą╗ąĄčéą░ąĄčé ą┐ąŠą┤čĆčÅą┤ 4 ą┐ą░ą║ąĄčéą░, ą░ ąĄčüą╗ąĖ ą▓čüčéą░ą▓ąĖčéčī ąĮą░ ą┐čĆąĖąĄą╝ ą┐ą░ą║ąĄčéą░ čü ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ ą┤ą░č鹊ą╣ ąŠčéą┐čĆą░ą▓ą║čā ąśąÜ, č鹊 ąĖčģ ąĮąĖčģ čāčüą┐ąĄą▓ą░ąĄčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčīčüčÅ 2 (ąŠą┤ąĖąĮ čĆą░ąĘ ą┐čĆąŠčüą║ąŠčćąĖą╗ąŠ 3).
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
Mishany
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: CAN ą░ą┤ą░ą┐č鹥čĆ ą┤ą╗čÅ čĆčāą╗ąĄą▓čŗčģ ą║ąĮąŠą┐ąŠą║ VW Polo Sedan
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ąĮąŠčÅ 08, 2015 21:17:07
ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖą╣ ą║ąŠčé
ąÜą░čĆą╝ą░: 8
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 128
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄąĮ 20, 2013 00:00:58ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1031ą×čéą║čāą┤ą░: ą╝ąŠčüą║ą▓ą░, ą╝.ąĪčģąŠą┤ąĮąĄąĮčüą║ą░čÅ
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą┐čĆąŠą▓ąĄčĆą║ą░ i ą▒ąĖčéą░ ąĮą░ ąĮąĄčĆą░ą▓ąĄąĮčüčéą▓ąŠ 0, ą╝čŗ ąČąĄ ą┐ąĄčĆąĄą┤ą░ąĄą╝ čćąĖčüą╗ąŠ ą▓ ą▓ąĖą┤ąĄ ą▒ąĖč鹊ą▓ ą▓ąŠčé ąĖ čćąĖčéą░ąĄą╝ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ą║ą░ąČą┤čŗą╣ ą▒ąĖčé ąĄčüą╗ąĖ 0 ą┐ąĄčĆąĄą┤ą░ąĄą╝ 0, ąĄčüą╗ąĖ ąĮąĄ ąĮąŠą╗čī ą┐ąĄčĆąĄą┤ą░ąĄą╝ ąĄą┤ąĄąĮąĖčćą║čā. 1<<0 ąĄčüčéčī ąĮčāą╗ąĄą▓ąŠą╣ ą▒ąĖčé, 1<<7 čüąĄą┤čīą╝ąŠą╣ (ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣) ą▒ąĖčé
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
ą×čĆą│ą░ąĮąĖąĘą░čåąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąĮą░ą┤ąĄąČąĮčŗčģ ą╗ąĖčéąĖąĄą▓čŗčģ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓ EVE ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ ą░ąĘąĖą░čéčüą║ąŠą│ąŠ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░
ąÜą░č湥čüčéą▓ąĄąĮąĮąŠąĄ ąĖ ą▒ąĄąĘąŠą┐ą░čüąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, čĆą░ą▒ąŠčéą░čÄčēąĄąĄ ąŠčé ą░ą║ą║čāą╝čāą╗čÅč鹊čĆą░, ą┤ąŠą╗ąČąĮąŠ čāčćąĖčéčŗą▓ą░čéčī ąĄą│ąŠ čäąĖąĘąĖč湥čüą║ąĖąĄ ąĖ čģąĖą╝ąĖč湥čüą║ąĖąĄ čüą▓ąŠą╣čüčéą▓ą░, ą┐čĆąŠčäąĖą╗ąĖ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░, ąĖčģ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ą┐ąŠą┤ ą▓ą╗ąĖčÅąĮąĖąĄą╝ čĆą░ąĘą╗ąĖčćąĮčŗčģ čāčüą╗ąŠą▓ąĖą╣, čéą░ą║ąĖčģ ą║ą░ą║ č鹥ą╝ą┐ąĄčĆą░čéčāčĆą░ ąĖ č鹊ą║ ąĮą░ą│čĆčāąĘą║ąĖ. ą£čŗ čĆą░čüčüą║ą░ąČąĄą╝ ąŠ ą╗ąĖčéąĖą╣-ąĖąŠąĮąĮčŗčģ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąĮčŗčģ ą▒ą░čéą░čĆąĄčÅčģ EVE ąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čĆąĄčłąĄąĮąĖčÅčģ ąŠčé čĆą░ąĘą╗ąĖčćąĮčŗčģ ą║ąĖčéą░ą╣čüą║ąĖčģ ą║ąŠą╝ą┐ą░ąĮąĖą╣, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗčģ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠč鹊ą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čŹčéąĖčģ ąÉąÜąæ. ą¤čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ą▓ čüčéą░čéčīąĄ ą║ąĖčéą░ą╣čüą║ąĖąĄ ą░ąĮą░ą╗ąŠą│ąĖ ą┐ąŠą╝ąŠą│čāčé ąĘą░ą╝ąĄąĮąĖčéčī ą┐čĆąŠą┤čāą║čåąĖčÄ ąĘą░ą┐ą░ą┤ąĮčŗčģ ą▒čĆąĄąĮą┤ąŠą▓ čü ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĄą╣ čåąĄąĮčŗ ą▒ąĄąĘ ą┐ąŠč鹥čĆąĖ ą║ą░č湥čüčéą▓ą░.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
bratec_bober
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: CAN ą░ą┤ą░ą┐č鹥čĆ ą┤ą╗čÅ čĆčāą╗ąĄą▓čŗčģ ą║ąĮąŠą┐ąŠą║ VW Polo Sedan
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ąĮąŠčÅ 09, 2015 05:11:39
ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā!
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čüąĄąĮ 26, 2012 18:25:30ąĪąŠąŠą▒čēąĄąĮąĖą╣: 23
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
ąĀąĄą║ą╗ą░ą╝ą░
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
bratec_bober
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: CAN ą░ą┤ą░ą┐č鹥čĆ ą┤ą╗čÅ čĆčāą╗ąĄą▓čŗčģ ą║ąĮąŠą┐ąŠą║ VW Polo Sedan
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ąĮąŠčÅ 10, 2015 19:29:46
ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā!
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čüąĄąĮ 26, 2012 18:25:30ąĪąŠąŠą▒čēąĄąĮąĖą╣: 23
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąÆ ąŠą▒čēąĄą╝, ąĄčēąĄ ąŠą┤ąĮą░ ą┐ąŠą▒ąĄą┤ą░! Can ąĖ Kenwood č鹥ą┐ąĄčĆčī čĆą░ąĘą│ąŠą▓ą░čĆąĖą▓ą░čÄčé)
ąÆąŠčé čéą░ą║ąŠą╣ ą▓ąŠčé čüą║ąĄčéčć
ąĪą┐ąŠą╣ą╗ąĄčĆ // Version 1.0, čäąĖą╗čīčéčĆ CAN čü ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą╣ ą┐ąĄčĆąĄą┤ą░č湥ą╣ IR-ą║ąŠą┤ą░ąźčĆąĄąĮ ąĘąĮą░ąĄčé, čćč鹊 ąĘą░ ą║ąŠą┤čŗ čüąĖą│ąĮą░ą╗ąŠą▓, ąĖ ą┐ąŠč湥ą╝čā čéą░ą╝ 49 ą▒ąĖčé, ąĮąŠ čéčāčé ą▓čüąĄ ąĮąĄą╝ąĮąŠą│ąŠ ąĖąĮą░č湥, č湥ą╝ ą┐čĆąĖ ąŠčéą┐čĆą░ą▓ą║ąĄ IR-ą║ąŠą┤ą░, čģąŠčéčÅ ą▒čŗ ą┐ąŠč鹊ą╝čā, čćč鹊 ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĮą░ ą╗ąĖąĮąĖąĖ ą▓čŗčüąŠą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī. ąÜčüčéą░čéąĖ, čĆą░ą▒ąŠčéą░ąĄčé ą┤ą░ąČąĄ ą▒ąĄąĘ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą╝ą░čüčüąĄ ą░ą▓č鹊/ą╝ą░ą│ąĮąĖč鹊ą╗čŗ, č鹊 ąĄčüčéčī ą┐ąŠ ąŠą┤ąĮąŠą╝čā ą┐čĆąŠą▓ąŠą┤čā.
ąÜąŠą┤ ąŠčéą┐čĆą░ą▓ą║ąĖ č湥čüčéąĮąŠ čüą║ąŠą┐ąĖą┐ą░čüčéč湥ąĮ ąŠčéčüčÄą┤ą░
http://custombaggerforum.com/forum/showthread.php?551-Road-Glide-Hacks/page3 ąØąŠ ąĮąĄ ą▓čüąĄ čéą░ą║ ą│ą╗ą░ą┤ą║ąŠ, ąĄčüčéčī ąĘą░ą│ą▓ąŠąĘą┤ą║ą░. ąÜą░ą║ ą╝čŗ čāąČąĄ ąĘąĮą░ąĄą╝, ą┐čĆąĖ ąĮą░ąČą░čéąĖąĖ ą║ą╗ą░ą▓ąĖčłąĖ ą░čĆą┤čāąĖąĮąŠ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé 4 ą║ą░ąĮ-ą┐ą░ą║ąĄčéą░. ąĢčüą╗ąĖ ą▓čüčéą░ą▓ąĖčéčī ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ąśąÜ, č鹊 ą┐ąŠ ą║ą░ąĮčā čāčüą┐ąĄą▓ą░ąĄčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčīčüčÅ 2 (ą░ ąĖąĮąŠą│ą┤ą░ 3), č鹊čćąĮąĄąĄ ą┤ą░ąČąĄ ąĮą░ą▓ąĄčĆąĮąŠąĄ ąŠąĮąĖ ąŠčüčéą░čÄčéčüčÅ ą▓ ą▒čāč乥čĆąĄ mcp. ąĪąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ, ą┐čĆąĖ ąĮą░ąČą░čéąĖąĖ ą║ąĮąŠą┐ą║ąĖ ą│čĆąŠą╝ą║ąŠčüčéčī čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ ąĮą░ 2 ą┐čāąĮą║čéą░, čéčĆąĄą║ąĖ ą┐ąĄčĆąĄą║ą╗čÄčćą░čÄčéčüčÅ č湥čĆąĄąĘ 1)). ąØčāąČąĮąŠ ą┐čĆąĖą┐ąĖą╗ąĖčéčī čüčÄą┤ą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║, ą║ąŠč鹊čĆčŗą╣ ą▒čŗ čüčćąĖčéą░ą╗ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗąĄ ą┐ą░ą║ąĄčéčŗ ą▓ č鹥č湥ąĮąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ čüčćąĖčéą░ą╗ ąĖčģ ąĘą░ ąŠą┤ąĖąĮ ą┐ą░ą║ąĄčé, ą╗ąĖą▒ąŠ ąĮąĖč湥ą│ąŠ ąĮąĄ ą┤ąĄą╗ą░ą╗ ą┐čĆąĖ ą▓čüąĄčģ ą┐ąŠą╗čāč湥ąĮąĖčÅčģ, ą║čĆąŠą╝ąĄ ą┐ąĄčĆą▓ąŠą│ąŠ.
ąÉ ąĄčēąĄ ąĮą░ą║ąŠą┐ą░ą╗ ą┐ą░ą║ąĄčéčŗ čü ą┤ą░ąĮąĮčŗą╝ąĖ ąŠ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ąĘą░ą┤ąĮąĄą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĖ ą╝ąŠąČąĮąŠ čüčÄą┤ą░ ąĘą░ą┐ąĖą╗ąĖčéčī ąŠčéą┐čĆą░ą▓ą║čā ATT ą┐čĆąĖ ąĄąĄ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ąĖ ąĄčēąĄ čĆą░ąĘ ATT ą┐čĆąĖ ą▓čŗą║ą╗čÄč湥ąĮąĖąĖ.
ąĀą░ą▒ąŠčéą░ ąĖą┤ąĄčé..)) ąØąĄ ą┐čĆąŠčłą╗ąŠ ąĖ 3 ą│ąŠą┤ą░..))
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
Mishany
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: CAN ą░ą┤ą░ą┐č鹥čĆ ą┤ą╗čÅ čĆčāą╗ąĄą▓čŗčģ ą║ąĮąŠą┐ąŠą║ VW Polo Sedan
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ąĮąŠčÅ 10, 2015 22:30:20
ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖą╣ ą║ąŠčé
ąÜą░čĆą╝ą░: 8
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 128
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄąĮ 20, 2013 00:00:58ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1031ą×čéą║čāą┤ą░: ą╝ąŠčüą║ą▓ą░, ą╝.ąĪčģąŠą┤ąĮąĄąĮčüą║ą░čÅ
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąĮčā ą▓ąŠčé, ąŠčüčéą░ą╗ąŠčüčī čĆą░ąĘčāą║čĆą░čüąĖčéčī ąĖ ą╝ąŠąĮą░ ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
dmitriy.p
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: CAN ą░ą┤ą░ą┐č鹥čĆ ą┤ą╗čÅ čĆčāą╗ąĄą▓čŗčģ ą║ąĮąŠą┐ąŠą║ VW Polo Sedan
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ąĮąŠčÅ 17, 2015 14:30:41
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé čüąĄąĮ 17, 2015 13:18:32ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
bratec_bober, ą║ą░ą║ čā č鹥ą▒čÅ ą┤ąĄą╗ą░ čü ą┐čĆąŠąĄą║č鹊ą╝? ąŻ ą╝ąĄąĮčÅ ąĘą░ą┤ą░čćą║ą░ ą┐ąŠą┐čĆąŠčēąĄ č湥ą╝ čā č鹥ą▒čÅ, ąĮčāąČąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī ą╝ą░čäą░ąĮąŠą╝ čü čĆąĄąĘąĖčüčéąĖą▓ąĮčŗčģ ą║ąĮąŠą┐ąŠą║ čĆčāą╗čÅ. ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ č鹊ąČąĄ ą║ąĄąĮą▓čāą┤ąŠą╝, ąĖ č鹊ąČąĄ ą┐ąŠ ąŠą┤ąĮąŠą╝čā ą┐čĆąŠą▓ąŠą┤čā. ąØąĄ ą╝ąŠą│čā čĆą░ąĘąŠą▒čĆą░čéčīčüčÅ čü ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ čćą░čüčéčīčÄ. ą╝ąŠąČąĄčé ą┐čĆąŠą▒ą╗ąĄą╝ą░ čü ą┐ąŠąĮąĖą╝ą░ąĮąĖąĄą╝ ą┐čĆąŠč鹊ą║ąŠą╗ą░. ąśąĘ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ą┐ąŠąĮčÅą╗. čćč鹊 ą┐ą░čāąĘą░ čŹč鹊 ąŠčéčüčāčéčüčéą▓ąĖąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, čćč鹊 čÅ ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗. ąØąŠ ą╝ąĮąĄ čüąŠą▓ąĄč鹊ą▓ą░ą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čéčĆą░ąĮąĘąĖčüč鹊čĆ, ą┤ą╗čÅ ąĖąĮą▓ąĄčĆčéąĖčĆąŠą▓ą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░. ąóčŗ ą║ą░ą║ čüą┤ąĄą╗ą░ą╗? ąóčĆą░ąĮąĘąĖčüč鹊čĆą░ ą┐ąŠą┤ čĆčāą║ąŠą╣ ąĮąĄčé, ąĮąĄ ą╝ąŠą│čā ą┐čĆąŠą▓ąĄčéčĆąĖčéčī ą┐čĆąĄą┤ą╗ąŠąČąĄąĮąĮčŗą╣ ą▓ą░čĆąĖą░ąĮčé. ąĢčēčæ ąĄčüčéčī ą┐ąŠą┤ąŠąĘčĆąĄąĮąĖčÅ, čćč鹊 ąĖąĘ-ąĘą░ ąĘą░ą┤ąĄčƹȹĄą║, čüą▓čÅąĘą░ąĮąĮčŗą╝ąĖ čü ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄą╝ ą┤čĆčāą│ąĖčģ čäčāąĮą║čåąĖą╣ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ, ąĮąĄ ą▓čŗą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą▓čĆąĄą╝ąĄąĮąĮčŗąĄ ąĘą░ą┤ąĄčƹȹ║ąĖ ą┤ą╗čÅ čüąŠą▒ą╗čÄą┤ąĄąĮąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ NEC
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
bratec_bober
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: CAN ą░ą┤ą░ą┐č鹥čĆ ą┤ą╗čÅ čĆčāą╗ąĄą▓čŗčģ ą║ąĮąŠą┐ąŠą║ VW Polo Sedan
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ąĮąŠčÅ 19, 2015 18:15:00
ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā!
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čüąĄąĮ 26, 2012 18:25:30ąĪąŠąŠą▒čēąĄąĮąĖą╣: 23
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
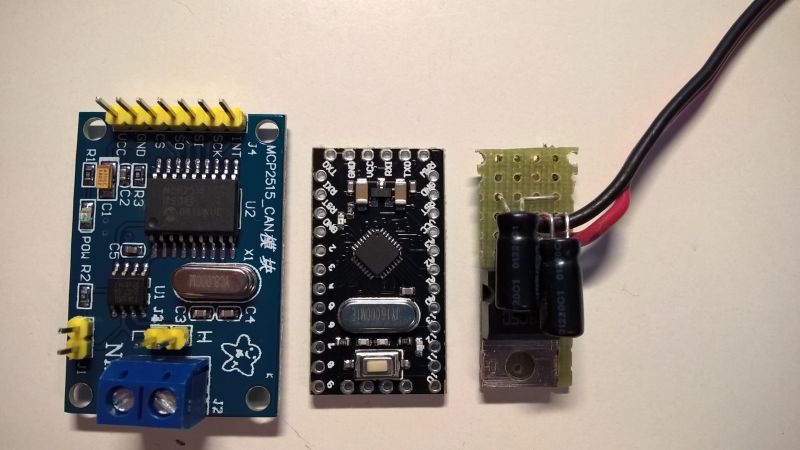
ą¤ą░čāąĘą░ - čŹč鹊 ą▓čŗčüąŠą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĮą░ ą╗ąĖąĮąĖąĖ - ą▓čŗčüąŠą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī. ąśą╝ą┐čāą╗čīčü - ąĮąĖąĘą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī. ąØą░ ą┐čĆą░ą║čéąĖą║ąĄ ą▓čŗčłą╗ąŠ čéą░ą║. ą¤ąŠ ąŠą┐ąĖčüą░ąĮąĖčÄ - ą┤ą░, ą▓čüąĄ ą║ą░ą║ čéčŗ ą│ąŠą▓ąŠčĆąĖčłčī, ąĖ Mishany ą│ąŠą▓ąŠčĆąĖą╗, ąĖ wheelremote ą┐ąĖčłąĄčé. ąÜąŠčĆąŠč湥, ą▓čüąĄ čéą░ą║, ą║ą░ą║ ą▓ ąŠą┐ąĖčüą░ąĮąĖąĖ, ąĮąŠ čāčĆąŠą▓ąĮąĖ ąĮą░ą┤ąŠ ąĖąĮą▓ąĄčĆčéąĖčĆąŠą▓ą░čéčī))) čÅ ąĮąĄ ąĘąĮą░čÄ, ą║ą░ą║ ą┐čĆąŠčēąĄ čüą║ą░ąĘą░čéčī)) ąĪčģąĄą╝ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ą░ąĮą░ ą▓ čüą║ąĄčéč湥, ąĮą░ 4-čÄ ąĮąŠą│čā ą░čĆą┤čāąĖąĮčŗ ą┐ąŠą▓ąĄčüąĖą╗ ą▓čŗą▓ąŠą┤ ąĮą░ remote_cont, ą▓čüąĄ čĆą░ą▒ąŠčéą░ąĄčé. ąĪąĄą│ąŠą┤ąĮčÅ ą║ą░ą║ čĆą░ąĘ ą┐čĆąĖčłą╗ą░ ą┐ąŠčüą╗ąĄą┤ąĮčÅčÅ ąĘą░ą┐čćą░čüčéčī - can-ą╝ąŠą┤čāą╗čī ąŠčé ą║ąĖčéą░ą╣čåąĄą▓, ą┐ąŠą┤čĆčāąČčā ąĄą│ąŠ čü pro-mini ąĖ l7805 ąĖ ą▒čāą┤ąĄčé ą│ąŠč鹊ą▓ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ) ą║ą░ą║ ą▒čāą┤ąĄčé ą│ąŠč鹊ą▓ąŠ - ą▓čŗą╗ąŠąČčā.ąĪą┐ąŠą╣ą╗ąĄčĆ // Version 1.0, čäąĖą╗čīčéčĆ CAN čü ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą╣ ą┐ąĄčĆąĄą┤ą░č湥ą╣ IR-ą║ąŠą┤ą░
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
Mishany
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: CAN ą░ą┤ą░ą┐č鹥čĆ ą┤ą╗čÅ čĆčāą╗ąĄą▓čŗčģ ą║ąĮąŠą┐ąŠą║ VW Polo Sedan
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ąĮąŠčÅ 19, 2015 20:49:12
ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖą╣ ą║ąŠčé
ąÜą░čĆą╝ą░: 8
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 128
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄąĮ 20, 2013 00:00:58ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1031ą×čéą║čāą┤ą░: ą╝ąŠčüą║ą▓ą░, ą╝.ąĪčģąŠą┤ąĮąĄąĮčüą║ą░čÅ
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ, čäčāąĮą║čåąĖčÄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą╝ąŠą│čāčé č鹊ą╗čīą║ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░čéčī.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
bratec_bober
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: CAN ą░ą┤ą░ą┐č鹥čĆ ą┤ą╗čÅ čĆčāą╗ąĄą▓čŗčģ ą║ąĮąŠą┐ąŠą║ VW Polo Sedan
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą┤ąĄą║ 09, 2015 18:43:33
ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā!
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čüąĄąĮ 26, 2012 18:25:30ąĪąŠąŠą▒čēąĄąĮąĖą╣: 23
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąÆąŠčé ą│ąŠč鹊ą▓ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ. ą¦čāčéčī čāčéčī ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ą╗ ą║ąŠą┤ (ąĘą░ą║ąŠą╝ą╝ąĄąĮčéąĖčĆąŠą▓ą░ą╗ ą▓čüąĄ Serial.println ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ąĮčāąČąĮčŗ ą┤ą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ), ąĖąĮą░č湥 ą▒čŗą╗ąŠ ąĘą░ąĮčÅč鹊 95% ą┐ą░ą╝čÅčéąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ ProMini ąĖ ą▓čŗą┐ąŠą╗ąĮčÅą╗ąŠčüčī č鹊ą╗čīą║ąŠ ą┐ąĄčĆą▓čŗąĄ 2-3- ą║ąŠą╝ą░ąĮą┤čŗ, ą░ ą┤ą░ą╗čīčłąĄ čüčĆą░čć ą▓ čüąĄčĆąĖą░ą╗ ą║čĆą░ą║ąŠąĘčÅą▒čĆą░ą╝ąĖ.
ąÉ čéą░ą║ąČąĄ ąŠą┐čŗčéąĮčŗą╝ ą┐čāč鹥ą╝ ą▓čŗčÅčüąĮąĄąĮąŠ, čćč鹊 MCP2515 c 8mhz ą║ą▓ą░čĆčåąĄą╝ ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé čü mcp čü 16mhz ą║ą▓ą░čĆčåąĄą╝ (ą┤ąĄą╗ą░ą╗ can-čüąĄčéčī ąĖąĘ 2-čģ ą┐ą╗ą░čé). ąĪ čéą░čćą║ąŠą╣ čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ 16 mhz, ą┐ąŠčŹč鹊ą╝čā ą║ąĖčéą░ą╣čüą║ą░čÅ ą┐ą╗ą░čéą░ ąĮąĄ ąĘą░čĆą░ą▒ąŠčéą░ą╗ą░, ą┐ąŠčüą╗ąĄ ąĘą░ą╝ąĄąĮčŗ ą║ą▓ą░čåą░ ą▓čüąĄ ą┐ąŠą┐ąĄčĆą╗ąŠ. ąŚą░ą▓čéčĆą░ ą▓ąĖą┤ąŠčü ą▓čŗą╗ąŠąČčā, ą╝ąŠąČąĄčé ąĖąĮč鹥čĆąĄčüąĮąŠ ą║ąŠą╝čā ą▒čāą┤ąĄčé, ą║ą░ą║ ąĖąĘ ą║ą░čĆą╝ą░ąĮą░ ą┐ąŠą┤ ą╝ą░ą│ąĮąĖč鹊ą╗ąŠą╣ ą┐ąŠą╗ąŠ č鹊čĆčćąĖčé ą║čāčüąŠą║ ą▓ąĖčéčāčģąĖ čü ą║ąŠąĮąĮąĄą║č鹊čĆąŠą╝ rj-45. ąØąĄ ąŠą▒ąĄčüčüčāčéčīč鹥, čĆą░ą▒ąŠčéą░čÄ ą▓ č鹥ą╗ąĄą║ąŠą╝ąĄ, č湥ą╝ ą▒ąŠą│ą░čéčŗ, č鹥ą╝ ąĖ čĆą░ą┤čŗ)))
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
Fighter
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: CAN ą░ą┤ą░ą┐č鹥čĆ ą┤ą╗čÅ čĆčāą╗ąĄą▓čŗčģ ą║ąĮąŠą┐ąŠą║ VW Polo Sedan
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą╝ą░čĆ 28, 2016 12:29:09
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą░ą▓ą│ 01, 2007 13:32:33ąĪąŠąŠą▒čēąĄąĮąĖą╣: 94
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąöąŠą▒čĆčŗą╣ ą┤ąĄąĮčī.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
optima
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: CAN ą░ą┤ą░ą┐č鹥čĆ ą┤ą╗čÅ čĆčāą╗ąĄą▓čŗčģ ą║ąĮąŠą┐ąŠą║ VW Polo Sedan
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą╝ą░čĆ 28, 2016 14:19:18
ą¤čĆąŠčĆąĄąĘą░ą╗ąĖčüčī ąĘčāą▒čŗ
ąÜą░čĆą╝ą░: 5
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 25
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░ą╣ 08, 2012 10:42:29ąĪąŠąŠą▒čēąĄąĮąĖą╣: 232
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
Fighter ą┐ąĖčüą░ą╗(ą░):
ąöąŠą▒čĆčŗą╣ ą┤ąĄąĮčī.
ąöą╗čÅ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ čłąĖąĮčŗ CAN, čüąŠą▒ąĄčĆąĖ CANHacker, ą▓ čüąĄčéąĖ ą▓čüąĄ ą┤ą╗čÅ čŹč鹊ą│ąŠ ąĄčüčéčī ąĖ ą▒čāą┤ąĄčé ąĮčāąČąĮčŗą╣ ąĖąĮčüčéčĆčāą╝ąĄąĮčé ą┐ąŠą┤ čĆčāą║ąŠą╣.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąóčĆąĖąŠą┤
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: CAN ą░ą┤ą░ą┐č鹥čĆ ą┤ą╗čÅ čĆčāą╗ąĄą▓čŗčģ ą║ąĮąŠą┐ąŠą║ VW Polo Sedan
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░ą╣ 19, 2016 19:17:09
ąØą░čłąĄą╗ čéčĆą░ąĮąĘąĖčüč鹊čĆ. ą¤ąŠąĮčÄčģą░ą╗.
ąÜą░čĆą╝ą░: -3
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: -2
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą┤ąĄą║ 08, 2012 16:40:40ąĪąŠąŠą▒čēąĄąĮąĖą╣: 160
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą®ą░ ąĘą░ą┤ą░ą╝ čüą░ą╝čŗą╣ čéčāą┐ąŠą╣ ą▓ąŠą┐čĆąŠčü ą▓ čŹč鹊ą╣ č鹥ą╝ąĄ
CAN-čłąĖąĮą░ ą┤ą▓čāčģą┐čĆąŠą▓ąŠą┤ąĮą░čÅ (L/H). ąóčĆąĄą▒čāąĄčéčüčÅ ą╗ąĖ čüąŠąĄą┤ąĖąĮčÅčéčī ąĘąĄą╝ą╗ąĖ ą░ą▓č鹊ą╝ąŠą▒ąĖą╗čÅ ąĖ čüą▓ąŠąĄą│ąŠ ą┤ąĄą▓ą░ą╣čüą░?
ąÆąŠą┐čĆąŠčü ą▓ąŠąĘąĮąĖą║ ą▓ čüą▓čÅąĘąĖ čü č鹥ą╝, čćč鹊 ąĮą░ą┐čĆąĖą╝ąĄčĆ čā čŹč鹊ą╣ čłčéčāą║ąĖ ąĘąĄą╝ą╗čÅ ąĮąĄ ą▓čŗą▓ąĄą┤ąĄąĮą░:
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
Mishany
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: CAN ą░ą┤ą░ą┐č鹥čĆ ą┤ą╗čÅ čĆčāą╗ąĄą▓čŗčģ ą║ąĮąŠą┐ąŠą║ VW Polo Sedan
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░ą╣ 19, 2016 19:21:30
ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖą╣ ą║ąŠčé
ąÜą░čĆą╝ą░: 8
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 128
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄąĮ 20, 2013 00:00:58ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1031ą×čéą║čāą┤ą░: ą╝ąŠčüą║ą▓ą░, ą╝.ąĪčģąŠą┤ąĮąĄąĮčüą║ą░čÅ
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąóčĆąĖąŠą┤
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: CAN ą░ą┤ą░ą┐č鹥čĆ ą┤ą╗čÅ čĆčāą╗ąĄą▓čŗčģ ą║ąĮąŠą┐ąŠą║ VW Polo Sedan
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░ą╣ 26, 2016 04:40:01
ąØą░čłąĄą╗ čéčĆą░ąĮąĘąĖčüč鹊čĆ. ą¤ąŠąĮčÄčģą░ą╗.
ąÜą░čĆą╝ą░: -3
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: -2
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą┤ąĄą║ 08, 2012 16:40:40ąĪąŠąŠą▒čēąĄąĮąĖą╣: 160
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąĢčēčæ ąŠą┤ąĖąĮ ą▓ąŠą┐čĆąŠčüąĖą║ ą┐ąŠ Can.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
optima
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: CAN ą░ą┤ą░ą┐č鹥čĆ ą┤ą╗čÅ čĆčāą╗ąĄą▓čŗčģ ą║ąĮąŠą┐ąŠą║ VW Polo Sedan
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░ą╣ 26, 2016 08:13:05
ą¤čĆąŠčĆąĄąĘą░ą╗ąĖčüčī ąĘčāą▒čŗ
ąÜą░čĆą╝ą░: 5
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 25
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░ą╣ 08, 2012 10:42:29ąĪąŠąŠą▒čēąĄąĮąĖą╣: 232
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąÜąŠąĮąĄčćąĮąŠ ąĄčüčéčī! ąĖąĮą░č湥 ą║ą░ą║ ą▒čŗ čĆą░ąĘčĆčāą╗ąĖą▓ą░ą╗ąĖčüčī ą┐čĆąĖąŠčĆčĆąĖč鹥čéčŗ, ąĮčāą╗ąĄą▓ąŠą╣ id ąĖą╝ąĄąĄčé ą▓čŗčüčłąĖą╣ ą┐čĆąĖąŠčĆčĆąĖč鹥čé.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąóčĆąĖąŠą┤
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: CAN ą░ą┤ą░ą┐č鹥čĆ ą┤ą╗čÅ čĆčāą╗ąĄą▓čŗčģ ą║ąĮąŠą┐ąŠą║ VW Polo Sedan
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░ą╣ 26, 2016 09:16:40
ąØą░čłąĄą╗ čéčĆą░ąĮąĘąĖčüč鹊čĆ. ą¤ąŠąĮčÄčģą░ą╗.
ąÜą░čĆą╝ą░: -3
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: -2
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą┤ąĄą║ 08, 2012 16:40:40ąĪąŠąŠą▒čēąĄąĮąĖą╣: 160
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąöą░, čüą┐ą░čüąĖą▒ąŠ, ą▓čüčæ ą┐ąŠąĮčÅčéąĮąŠ!
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
karaseg
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: CAN ą░ą┤ą░ą┐č鹥čĆ ą┤ą╗čÅ čĆčāą╗ąĄą▓čŗčģ ą║ąĮąŠą┐ąŠą║ VW Polo Sedan
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ąĮąŠčÅ 23, 2017 09:54:48
ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā!
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ąŠą║čé 01, 2017 08:40:23ąĪąŠąŠą▒čēąĄąĮąĖą╣: 30
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
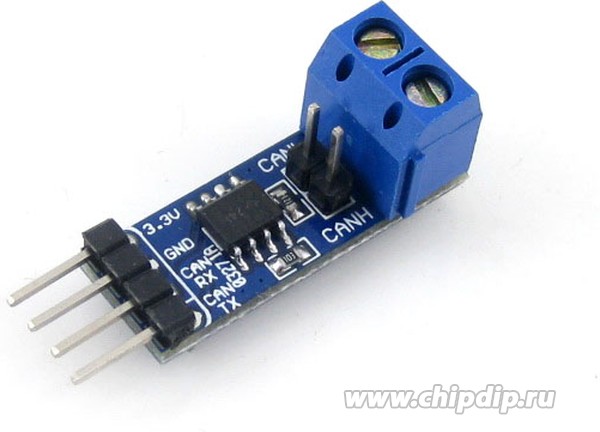
ą¤ąŠčÅčüąĮąĖč鹥, ąĄčüą╗ąĖ ąĮąĄ čüą╗ąŠąČąĮąŠ čéą░ą║ąŠą╣ ą╗ą░ą╝ąĄčĆčüą║ąĖą╣ ą▓ąŠą┐čĆąŠčü, ą┤ą╗čÅ č湥ą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą╝ąĖą║čĆčāčģčā sja1000 ą┐čĆąĖ čüąŠąĘą┤ą░ąĮąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü CAN čłąĖąĮąŠą╣, čćč鹊 ą╝ąĄčłą░ąĄčé ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā ąĮą░ą┐čĆčÅą╝čāčÄ čĆą░ą▒ąŠčéą░čéčī čü CAN čéčĆą░ąĮčüąĖą▓ąĄčĆąŠą╝ tja1050 ?
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
optima
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: CAN ą░ą┤ą░ą┐č鹥čĆ ą┤ą╗čÅ čĆčāą╗ąĄą▓čŗčģ ą║ąĮąŠą┐ąŠą║ VW Polo Sedan
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ąĮąŠčÅ 23, 2017 11:47:18
ą¤čĆąŠčĆąĄąĘą░ą╗ąĖčüčī ąĘčāą▒čŗ
ąÜą░čĆą╝ą░: 5
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 25
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░ą╣ 08, 2012 10:42:29ąĪąŠąŠą▒čēąĄąĮąĖą╣: 232
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
1) sja1000 ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ąĄčüą╗ąĖ čā ą┐čĆąĖą╝ąĄąĮčÅąĄą╝ąŠą│ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĮąĄčé ą▓ ąĮą░ą╗ąĖčćąĖąĖ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ CAN, ąĖ can čŹč鹊 ąĮąĄ č鹊čé ąĖąĮč鹥čĆč乥ą╣čü ą║ąŠč鹊čĆčŗą╣ ą╗ąĄą│ą║ąŠ čüąŠąĘą┤ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĪčéčĆą░ąĮąĖčåą░ 4 ąĖąĘ 6
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 106 ]
, , , , ,
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: ąĮąĄčé ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ ąĖ ą│ąŠčüčéąĖ: 9
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ