|
ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
 
|
ąĪčéčĆą░ąĮąĖčåą░ 298 ąĖąĘ 476
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 9506 ] |
... , , , , , , ... |
| ąÉą▓č鹊čĆ |
ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
Ruzik

|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow  ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą╝ą░čĆ 28, 2018 18:28:10 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 55
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1632
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄąĮ 09, 2011 17:17:47
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 5713
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
psychosą¤ąŠą┐čĆąŠą▒čāą╣ ą┐ąŠ ąĘąĄą╗ąĄąĮąŠą╣ ą╗ąĖąĮąĖąĖ ą▓čŗčüčéą░ą▓ąĖčéčī ą┐ą╗ą░čéčā. ąŚą░č鹥ą╝ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ, ą│ą┤ąĄ ąĮą░čĆąĖčüąŠą▓ą░ąĮą░ čüčģąĄą╝ą░, ąĘą░ą╝ąĄčĆčÅąĄčłčī čĆą░čüčüč鹊čÅąĮąĖčÅ ą┐ąŠ čģ ąĖ čā ą┤ąŠ ąĮą░čćą░ą╗ą░ ą║ąŠąŠčĆą┤ąĖąĮą░čé ą┐ą╗ą░čéčŗ ąŠčé ąŠčéą▓ąĄčĆčüčéąĖčÅ, čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ čĆąŠąĘąŠą▓čŗą╝ čåą▓ąĄč鹊ą╝. ąŚą░č鹥ą╝ ą▓čüčéą░ąĄčłčī ąĮą░ čŹč鹊 ąŠčéą▓ąĄčĆčüčéąĖąĄ, ąŠą▒ąĮčāą╗čÅąĄčłčī ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ ąĖ ąĄą┤ąĄčłčī ą┐ąŠ čģ ą┤ąŠ ąĘą░ą╝ąĄčĆąĄąĮąĮąŠą│ąŠ čĆą░čüčüč鹊čÅąĮąĖčÅ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ. ąŚą░č鹥ą╝ ąĄą┤ąĄčłčī ą┐ąŠ čā ąĘą░ą╝ąĄčĆąĄąĮąĮąŠąĄ čĆą░čüčüč鹊čÅąĮąĖąĄ. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐ąŠą┐ą░ą╗ ą▓ ąĘą░ą╝ąĄčĆąĄąĮąĮčŗąĄ čĆą░ąĘą╝ąĄčĆčŗ, čŹč鹊 ą▒čāą┤ąĄčé 0 čéą▓ąŠąĄą╣ ą┐ą╗ą░čéčŗ. ąÆąĖąČčā, čćč鹊 čĆąĄą┐ąĄčĆčŗ ąŠą▒čĆąĄąĘą░ą╗ąĖčüčī ą║ą░ą║ čĆą░ąĘ ą┐ąŠ ą║čĆą░čÅą╝ ą┐ą╗ą░čéčŗ. ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčłčī 0 菹║čüą┐ąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ ą▓ą┐ąĄčĆąĄą┤, 菹║čüą┐ąŠąĮąĖčĆčāą╣. 
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
 |
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Forward
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą╝ą░čĆ 28, 2018 18:44:00 |
|
| ą£čāčćąĖč鹥ą╗čī ą╝ąĖą║čĆąŠčüčģąĄą╝ |
ąÜą░čĆą╝ą░: 11
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 229
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą░ą┐čĆ 20, 2014 14:18:07
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 445
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
psychos ą┐ąĖčüą░ą╗(ą░): ąÆąŠą┐čĆąŠčü ą║ą░ą║ ą┐čĆąĖčåąĄą╗ąĖčéčīąĪą» ąĖ ą▓čŗčĆąŠą▓ąĮąĖčéčīąĪą»? ą£ąŠąČąĮąŠ ą┐čĆąĄą┤ą╗ąŠąČąĖčéčī ą┤ąŠą▓ąŠą╗čīąĮąŠ čéčĆčāą┤ąŠąĄą╝ą║ąĖą╣ čüą┐ąŠčüąŠą▒ ą▒ąŠčĆčīą▒čŗ čüąŠ čüą╗ąŠąČąĖą▓čłąĄą╣čüčÅ čüąĖčéčāą░čåąĖąĄą╣. ąĪą┤ąĄą╗ą░čéčī ąĮąĄ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╣ ą┐ąŠčüą╗ąŠą╣ąĮčŗą╣ ą┐ąĖčĆąŠą│, ą░ čĆąĄą░ą╗čīąĮčŗą╣ - č鹊 ąĄčüčéčī ą┤ąŠą▒ą░ą▓ąĖčéčī čüą╗ąŠą╣ čü ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╝ąĖ čĆąĄą┐ąĄčĆą░ą╝ąĖ (ąĄčēąĄ ąŠą┤ąĮą░ č鹥ą║čüč鹊ą╗ąĖč鹊ą▓ą░čÅ ąĘą░ą│ąŠč鹊ą▓ą║ą░) ąĖ čåąĄąĮčéčĆčāčÄčēąĖą╝ąĖ ąŠčéą▓ąĄčĆčüčéąĖčÅą╝ąĖ. ąóčēą░č鹥ą╗čīąĮąŠ ą▓čŗčĆąŠą▓ąĮčÅčéčī ą╝ąĄąČą┤čā čüąŠą▒ąŠą╣ čüą╗ąŠąĖ ąĖ čüą▓ąĄčéąĖčéčī ą┐ąŠą╗čāč湥ąĮąĮčŗą╣ ą┐ąĖčĆąŠą│. ąĀąĄąĘčāą╗čīčéą░čé ą▒čāą┤ąĄčé ąĘą░ą▓ąĖčüąĄčéčī ąŠčé ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠčüčéąĖ ą╗čāčćą░ ąĖ č鹊ą╗čēąĖąĮčŗ ą┐ąŠą┤ą╗ąŠąČą║ąĖ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
psychos
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą╝ą░čĆ 28, 2018 18:54:53 |
|
| ąÆčŗą╝ąŠą│ą░č鹥ą╗čī ą┐čĆąĖą┐ąŠčÅ |
 |
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 171
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čüąĄąĮ 23, 2008 19:36:10
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 538
ą×čéą║čāą┤ą░: ą£ą░ą│ąĮąĖč鹊ą│ąŠčĆčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
1) ą┐ąŠ č鹥čģąĮąĖč湥čüą║ąĖą╝ ą┐čĆąĖčćąĖąĮą░ą╝ ąĮąĄ ą╝ąŠą│čā čĆą░čüą┐ąŠą╗ąŠąČąĖčéčī čĆąĄą┐ąĄčĆčŗ ąĖą╝ąĄąĮąĮąŠ ą▓ čāą│ą╗ą░čģ ą┐ą╗ą░čéčŗ(čé.ą║. ąĮą░čłą░ čāą┤ą░čĆąĮą░čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮąŠčüčéčī ąĮąĄ čāą╝ąĄąĄčé ą┤ąĄą╗ą░čéčī ą║ąŠčĆčŗčéą░ čü ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮčŗą╝ąĖ ą║čĆą░čÅą╝ąĖ) ą▓ čüą▓čÅąĘąĖ čü čŹčéąĖą╝ čĆąĄą┐ą┐ąĄčĆčŗ čĆą░čüą┐ąŠą╗ąŠąČąĖą╗ ą┐ąŠ čüč鹊čĆąŠąĮą░ą╝ čćčāčéčī ą▓ ą┤ą░ą╗ąĖ ąŠčé čāą│ą╗ąŠą▓....
...ąÆąŠą┐čĆąŠčü ą║ą░ą║ ą┐čĆąĖčåąĄą╗ąĖčéčīąĪą» ąĖ ą▓čŗčĆąŠą▓ąĮąĖčéčīąĪą»? ąŁč鹊 ąĮąĄ čĆąĄą┐ąĄčĆčŗ, čŹč鹊 ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ "ą║ą░ą║ ą▒čŗą║ ą┐ąŠčüčüą░ą╗". ąŻ č鹥ą▒čÅ ą┤ą░ąČąĄ ąĮąĄčé ą┤ą▓čāčģ čĆą░ąĘąĮąĄčüčæąĮąĮčŗčģ ąŠčéą▓ąĄčĆčüčéąĖą╣, čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĮčŗčģ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮąŠ, čćč鹊ą▒ čŹčéčā čüą░ą╝čāčÄ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čī ą▓čŗčüčéą░ą▓ąĖčéčī. ą¤ąŠčŹč鹊ą╝čā čāčüą┐ąĄčģ ą┤ą░ąĮąĮąŠą│ąŠ ą╝ąĄčĆąŠą┐čĆąĖčÅčéąĖčÅ ą╝ą░ą╗ąŠą▓ąĄčĆąŠčÅč鹥ąĮ. ąĮąĄ čüąŠą│ą╗ą░čüąĄąĮ čü ą║čĆąĖčéąĖą║ąŠą╣  čÅ ą┐ąŠą║ą░ąĘą░ą╗ čĆąĄą┐ąĄčĆčŗ, ą║ąŠč鹊čĆčŗąĄ ąĖą┤čāčé ą▓ čüą╗ąŠą╣ ą▓ HLDI čćč鹊ą▒ ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ąĮąŠą┐ą║ą░ą╝ąĖ h e pu pd ą┤ą╗čÅ ąĮą░ą▓ąĖą│ą░čåąĖąĖ ą┐ąŠ čĆąĄą┐ąĄčĆą░ą╝. ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ čĆąĄą┐ąĄčĆąŠą▓ čéą░ą╝ 2 ą║ąŠą╝ą┐ą╗ąĄą║čéą░: 1) ą┤ą╗čÅ HLDI, čćč鹊ą▒ ą│čĆčāąĘą░ąĮčāčéčī čüą╗ąŠą╣. 2) ą▓ąĖąĘčāą░ą╗čīąĮčŗą╣ ąĖčģ 8 ą┐ąŠ 2ąĮą░ čüč鹊čĆąŠąĮčā, ą▓čüąĄ ąŠąĮąĖčüąĖą╝ą╝ąĄčéčĆąĖčćąĮčŗ ą┐ąŠ ą║ąŠčĆąĖąĘąŠąĮčéą░ą╗ąĖ ąĖ ą┐ąŠ ą▓ąĄčĆčéąĖą║ą░ą╗ąĖ. č鹊 ąĄčüčéčī ą┐ąŠ ą┐ąĄčĆą▓ąŠą╝čā ą║ąŠą╝ą┐ą╗ąĄčéą║čā ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░ą╗ąŠčüčī čāą║ą░ąĘą░čéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ "ąĮą░čćą░ą╗ąŠ ą║ąŠąŠčĆą┤ąĖąĮą░čé", ąĮąŠ ą┐ąŠčģąŠąČąĄ ą┤ą░ąĮąĮą░čÅ ą▒ą░ąĘąŠą▓ą░čÅ čäčāąĮą║čåąĖčÅ čéčāčé ąĮąĄ ąĘą░ą╗ąŠąČąĄąĮą░, ą┐ąŠčüą║ąŠą╗čīą║čā čéčāčé ąĘą░ą╗ąŠąČąĄąĮąŠ čäąĖąĘąĖč湥čüą║ąŠąĄ ąĮą░ą╗ąĖčćąĖąĄ čĆąĄą┐ą┐ąĄčĆą░. ą» ąŠąČąĖą┤ą░ą╗ čćč鹊 ą┐ąŠ "ąĮą░ą╣ą┤ąĄąĮąĮčŗą╝ čĆąĄą┐ąĄčĆą░ą╝" ą║ąŠč鹊čĆčŗąĄ ą▒čāą┤čāčé ąĘą░ą╗ąŠąČąĄąĮčŗ ą▓ ą│ąĄčĆą▒ąĄčĆąĄ ą┐čĆąĖ ąĮą░ąČą░čéąĖąĖ ąĮąĖ ą║ąĮąŠą┐ą║čā"ąØąŠą╗čī" ą╝čŗ ą┐ąŠą╗čāčćąĖą╝ č鹥ą║čāčēąĖąĄ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ čĆąĄą┐ąĄčĆą░ (ą▓ ą╝ąŠčæą╝ čüą╗čāčćą░ąĄ ą┐ąŠ ą╗ąĄą▓ąŠą╣ čüč鹊čĆąŠąĮąĄ čŹč鹊 X0+čüą╝ąĄčēąĄąĮąĖąĄ ą║ą░ą╝ąĄčĆčŗ:Y35 +čüą╝ąĄčēąĄąĮąĖąĄ ą║ą░ą╝ąĄčĆčŗ), ąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé č鹊ą╗čīą║ąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ąĮą░čćą░ą╗ąŠ ą║ąŠąŠčĆą┤ąĖąĮą░čé. ą¦č鹊 čÅ ą▓ąĖąČčā ą▓ ą┤ą░ąĮąĮąŠą╝ čüą╗čāčćą░ąĄ: ą▓ą▒ąĖčéčī 3ą│ą▓ąŠąĘą┤čÅ, ą┐ąĄčĆąĄčüą░č湥ąĮąĖąĄ ą║ąŠč鹊čĆčŗčģ ąŠą▒čĆą░ąĘčāčÄčé ą╝ąĮąĖą╝ąŠąĄ ąĮą░čćą░ą╗ąŠ ą║ąŠąŠčĆą┤ąĖąĮą░čé ą┐ąŠ čŹčéąĖą╝ 3ą╝ ą│ą▓ąŠąĘą┤čÅą╝ ą║ą╗ąĄąĖą╝ 2 ą┐ąŠą╗ąŠčüą║ąĖ č鹥ą║čüč鹊ą╗ąĖčéą░ čĆąŠą▓ąĮčŗčģ, ąŠą▒čĆą░ąĘčāčÄčéčüčÅ 2 ą║čĆą░čÅ ą╗ąĄą▓čŗą╣ ąĖ ąĮąĖąČąĮąĖą╣.ą┤ą░ą╗ąĄąĄ: 1) ą║ą░čĆąĄčéą║ąŠą╣ [čüč鹊ą╗ąŠą╝] ąĖčēąĄą╝ Y0 - ąĮąĖąČąĮąĄą╣ čĆąĄą┐ą┐ąĄčĆ ąĮą░ ą┐ą╗ą░č鹥, ąĮą░ ą╗ąĖčüč鹊čćą║ąĄ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ Y 2)[ą║ą░čĆąĄčéą║ąŠą╣] čüč鹊ą╗ąŠą╝ ąĖčēąĄą╝ X0 - ąĮąĖąČąĮąĄą╣ čĆąĄą┐ą┐ąĄčĆ ąĮą░ ą┐ą╗ą░č鹥, ąĮą░ ą╗ąĖčüč鹊čćą║ąĄ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ X 3) ą┐čĆąĖąĄąĘąČą░ąĄą╝ ą▓ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ XY, ąČą╝čæčæą╝ čāčüčé 0 4) ą┐čĆąŠą▓ąĄčĆčÅąĄą╝ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ ąŠčüčéą░ą╗čīąĮčŗčģ čĆąĄą┐ąĄčĆąŠą▓, 菹║čüą┐ąŠąĮąĖčĆčāąĄą╝. ąĢčüą╗ąĖ čāč湥čüčéčī čćč鹊 ą║ąŠąĮčéčāčĆčŗ ą┐ą╗ą░čé ą▓čüąĄą│ą┤ą░ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗ, č鹊 č鹥ąŠčĆąĄčéąĖč湥čüą║ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠ čéą░ą║ąĖąĄ ą╝ą░ąĮąĖą┐čāą╗čÅčåąĖąĖ ąĮčāąČąĮąŠ ą▒čāą┤ąĄčé ą┤ąĄą╗ą░čéčī čĆą░ąĘ ą┐čĆąĖ ąĘą░ą┐čāčüą║ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ. UPD ąĢčĆčāąĮą┤ą░ ą║ą░ą║ą░čÅ č鹊 ą┐ąŠą╗čāčćą░ąĄčéčüčÅ... ąØčā čüą║ą░ąČąĄą╝ čāą║ą░ąĘą░čéčī 0 ą┐ą╗ą░čéčŗ ąĮą░ čüč鹊ą╗ąĄ ą▓ 2 čłą░ą│ą░ čéą░ą║: 1)ąĄą┤ąĄą╝ ą▓ ąĮąĖąČąĮąĖą╣ ą┐ąŠ ą╗ąĄą▓ą▓ąŠą╣ čüč鹊čĆąŠąĮąĄ čĆąĄą┐ąĄčĆ,ąČą╝čæą╝ čāčüčé 0, 2) ąĄą┤ąĄą╝ ą▓ ą╗ąĄą▓čŗą╣ čĆąĄą┐ąĄčĆ ą┐ąŠ ąĮąĖąČąĮąĄą╣ čüč鹊čĆąŠąĮąĄ, ą┤ą░ą╗ąĄąĄ čüą╝ąĄčēą░ąĄą╝čüčÅ ą║ą░čĆąĄčéą║ąŠą╣ ą▓ ą┐ąŠąĘąĖčåąĖčÄ ą┐čĆąĖ ą║č鹊čĆąŠą╣ ąĮą░čłą╗ąĖ ąĮąĖąČąĮąĖą╣ ą┐ąŠ ą╗ąĄą▓ąŠą╣ čüč鹊čĆąŠąĮąĄ, ąČą╝čæą╝ čāčüčéą░ąĮąŠą▓ąĖčéčī 0 ąÆčüčæ, ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą┐ąŠą║ą░ąĘą░ąĘą╗ąĖ ą│ą┤ąĄ 0 ąĮąŠ ą┐čĆąĖ čŹč鹊 ą╗ąĄą▓čŗą╣ ą║čĆą░ą╣ ą┐ą╗ą░čéčŗ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāąČąĄ ą▓čŗčĆąŠą▓ąĮąĄąĮ ą┐ąŠ ą▓ąĄčĆčéąĖą║ą░ą╗ąĖ čüč鹊ą╗ą░. č鹊ą│ą┤ą░ ą┐čĆąŠčüč鹊 ą┐čĆąŠą▓ąĄčĆčÅąĄą╝ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ ąŠčüčéą░ą╗čīąĮčŗčģ čĆąĄą┐ąĄčĆąŠą▓ ą┤ą╗čÅ č鹊ą│ąŠ čćč鹊ą▒čŗ čāą▒ąĄą┤ąĖčéčīčüčÅ ą▓ ą┐čĆą░ą▓ąĖą╗čīąĮąŠčüčéąĖ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą┐ą╗ą░čéčŗ ąĖ 菹║čüą┐ąŠąĮąĖčĆčāąĄą╝. ąöą░ą╗ąĄąĄ ą┐ąĄčĆąĄą▓ąŠčĆą░čćąĖą▓ą░ąĄą╝ ą┐ą╗ą░čéčā, ąĖ ą┐ąŠ čéą░ą║ąŠą╝čā ąČąĄ ą┐čāčéąĖ. ąŠą┤ąĮąŠ čāčüą╗ąŠą▓ąĖąĖąĄ - ą║čĆą░čÅ ą┐ą╗ą░čéčŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆąŠą▓ąĮčŗąĄ... ąĮą┤ą░,ąĮąĄ ąŠč湥ąĮčī čāą┤ąŠą▒čüčéą▓ąĄąĮąĮąŠ, ą╗ą░ą┤ąĮąŠ ą┐ąŠą║ą░ č鹥čĆą┐ąĄčéčī ą▒čāą┤ąĄą╝.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
SDimok
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░čĆ 29, 2018 02:39:35 |
|
| ą£čāčćąĖč鹥ą╗čī ą╝ąĖą║čĆąŠčüčģąĄą╝ |
 |
ąÜą░čĆą╝ą░: 21
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1015
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ č乥ą▓ 06, 2016 14:34:29
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 480
ą×čéą║čāą┤ą░: ąĪą░čÅąĮčüą║, ąśčĆą║čāčéčüą║ą░čÅ ąŠą▒ą╗ą░čüčéčī
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąÆąŠą┐čĆąŠčü ąÜą×ąóąÉčüčéčĆąŠčäąĖč湥čüą║ąŠą╣ ą▓ą░ąČąĮąŠčüčéąĖ(ą┐ąŠč鹊ą╝čā čćč鹊 ą┐ą╗ą░čéčŗ ą╝ąĄčéą░ą╗ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮčŗ, ąĖ ąĘą░ą║ą░čéą░ąĮčŗ č乊č鹊čĆąĄąĘąĖčüč鹊ą╝) ąĪąŠąĘą┤ą░ą╣ ą│ąĄčĆą▒ąĄčĆ čü 4 čāą│ą╗ąŠą▓čŗą╝ąĖ čĆąĄą┐ąĄčĆą░ą╝ąĖ. ą×ą▒čŖąĄą┤ąĖąĮąĖ ą│ąĄčĆą▒ąĄčĆ čü 4 čĆąĄą┐ąĄčĆą░ą╝ąĖ čüąŠ čüą▓ąŠąĖą╝ ą│ąĄčĆą▒ąĄčĆąŠą╝ (ą╗ąĖą▒ąŠ ą┐čĆąŠčüč鹊 ą┤ąŠą▒ą░ą▓čī 4 čĆąĄą┐ąĄčĆą░ ą┐ąŠ čāą│ą╗ą░ą╝ ą║ čüą▓ąŠąĄą╝čā). ąØą░ą┐ąĄčćą░čéą░ą╣ ąĄą│ąŠ ąĮą░ ąŠą▒čŗčćąĮąŠą╣ ą▒čāą╝ą░ą│ąĄ. ąĪą▓ąĄčĆčģčā ąĮą░ą╗ąŠąČąĖ čüą▓ąŠčÄ ą┐ą╗ą░čéčā(čéčēą░č鹥ą╗čīąĮąŠ ą▓čŗčĆą░ą▓ąĮąĖą▓ą░čÅ). ąöą░ą╗čīčłąĄ čĆą░ą▒ąŠčéą░ą╣ čü 4 ąĮą░čĆąĖčüąŠą▓ą░ąĮąĮčŗą╝ąĖ čāą│ą╗ąŠą▓čŗą╝ąĖ čĆąĄą┐ąĄčĆą░ą╝ąĖ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąÆčŗą▒ąĖčĆą░ąĄą╝ čüčģąĄą╝čā BMS ą┤ą╗čÅ ąĘą░čĆčÅą┤ą░ ą╗ąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗčģ (LiFePO4) ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓
ą×ą▒čÅąĘą░č鹥ą╗čīąĮčŗą╝ čāčüą╗ąŠą▓ąĖąĄą╝ ą┤ąŠą╗ą│ąŠą╣ ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ Li-FePO4-ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ EVE Energy, čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ BMS-ą╝ąĖą║čĆąŠčüčģąĄą╝. ąøąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗąĄ ąÉąÜąæ ąŠčéą╗ąĖčćą░čÄčéčüčÅ čéą░ą║ąĖą╝ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ, ą║ą░ą║ ą▓čŗčüąŠą║ą░čÅ ą╝ąĮąŠą│ąŠą║čĆą░čéąĮąŠčüčéčī čåąĖą║ą╗ąŠą▓ ąĘą░čĆčÅą┤ą░-čĆą░ąĘčĆčÅą┤ą░, ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▒čŗčüčéčĆąŠą╣ ąĘą░čĆčÅą┤ą║ąĖ, čāčüč鹊ą╣čćąĖą▓ąŠčüčéčī ą║ ą▒čāč乥čĆąĮąŠą╝čā čĆąĄąČąĖą╝čā čĆą░ą▒ąŠčéčŗ ąĖ ą┐čĆąĖąĄą╝ą╗ąĄą╝ą░čÅ čüč鹊ąĖą╝ąŠčüčéčī. ąØąŠ ą┤ą╗čÅ čŹčéąĖčģ ąÉąÜąæ ąŠč湥ąĮčī ą▓ą░ąČąĄąĮ ą║ąŠąĮčéčĆąŠą╗čī ą┐čĆąŠčåąĄčüčüą░ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░ ą┤ą╗čÅ ąĖąĘą▒ąĄą│ą░ąĮąĖčÅ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĘą░čĆčÅą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ 100% ąĘą░čĆčÅą┤ą░. ąśąĮąČąĄąĮąĄčĆčŗ ąÜą×ą£ą¤ąŁąø ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖą╗ąĖ čüą┐ąĖčüąŠą║ čéą░ą║ąĖčģ čĆąĄčłąĄąĮąĖą╣ ąŠčé čĆą░ąĘąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
psychos
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░čĆ 29, 2018 21:04:04 |
|
| ąÆčŗą╝ąŠą│ą░č鹥ą╗čī ą┐čĆąĖą┐ąŠčÅ |
|
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 171
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čüąĄąĮ 23, 2008 19:36:10
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 538
ą×čéą║čāą┤ą░: ą£ą░ą│ąĮąĖč鹊ą│ąŠčĆčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
 ą┐ąŠą║ą░ ą║ą░ą║ č鹊 čéą░ą║ ą¤ąŠą║ą░ ąĮąĄ ą┐ąŠą╣ą╝čā ąĖą╗ąĖ čüčéą░ąĮąŠą║ ą║čĆąĖą▓ąŠ čüą▓ąĄčĆą╗ąĖčé ąĖą╗ąĖ čüč鹊ą╗ čü ą║ą░čĆąĄčéą║ąŠą╣ ąĮąĄ ą▓čŗčĆąŠą▓ąĮąĄąĮ. čü ą┐čĆąĖąĮč鹥čĆąŠą╝ č鹊 ą▓ąŠąŠą▒čēąĄ... ąĮą░ą║ą╗ąŠąĮ ą║ą░čĆąĄčéą║ąĖ ą╝ąĄąĮčÅąĄčéčüčÅ ą┐ą╗ą░ąĮą║ąŠą╣ ą▓ ą║ąŠč鹊čĆčāčÄ ąŠąĮą░ čāą┐ąĖčĆą░ąĄčéčüčÅ, čüč鹊ą╗ ą┐ąŠą▓ąŠčĆą░čćąĖą▓ą░ąĄčéčüčÅ, čäąĖą│ ąĘąĮą░ąĄčé ą│ą┤ąĄ čāą│ą╗ąŠą▓ ąĮąĄčé... ą▓čĆąŠą┤ąĄ ą┐ąŠ ą╗ąĖčüč鹊čćą║čā ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ą╗. 3 čāą│ą╗ą░ +/- 0,1 ą╝ą╝ ą▒čīčÄčéčüčÅ, 4ą╣ ą▓ąĮąĖąĘ čāąĄąĘąČą░ąĄčé... ąĄą│ąŠ ą║ąŠčüčÅą║ ąĮą░ č乊čéą║ąĄ ą▓čŗčłąĄ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
SDimok
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ą╝ą░čĆ 30, 2018 05:22:25 |
|
| ą£čāčćąĖč鹥ą╗čī ą╝ąĖą║čĆąŠčüčģąĄą╝ |
|
ąÜą░čĆą╝ą░: 21
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1015
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ č乥ą▓ 06, 2016 14:34:29
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 480
ą×čéą║čāą┤ą░: ąĪą░čÅąĮčüą║, ąśčĆą║čāčéčüą║ą░čÅ ąŠą▒ą╗ą░čüčéčī
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 9
|
ąÉ 菹║čüą┐ąŠčĆčé ą│ąĄčĆą▒ąĄčĆą░ ą▓ąŠąĘą╝ąŠąČąĄąĮ? (ąĖą╝ąĄąĄčéčüčÅ ą▓ ą▓ąĖą┤čā ą┤ą╗čÅ čüą╗čāčćą░ąĄą▓ čü čüąŠčüčéą░ą▓ąĮčŗą╝ąĖ ą│ąĄčĆą▒ąĄčĆą░ą╝ąĖ). ą¤ąĖčüą░čéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā ą┤ą╗čÅ ą▓čŗą│čĆčāąĘą║ąĖ ą┐čĆąŠąĄą║čéą░ ą▓ Gerber čäą░ą╣ą╗ ą╝ąĮąĄ ą▓ą╗ąŠą╝ ąØąŠ čüą┐ąĄčåąĖą░ą╗čīąĮąŠ ą┤ą╗čÅ č鹥ą▒čÅ ą║ąŠąĄ čćč鹊 čüą┤ąĄą╗ą░ą╗. ąĪą┤ąĄą╗ą░ą╗ ą▓čŗą│čĆčāąĘą║čā/ąĘą░ą│čĆčāąĘą║čā ą▓čüąĄą│ąŠ ą▓ąŠčĆą║čüą┐ąĄą╣čüą░, čüąŠ ą▓čüąĄą╝ąĖ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĮčŗą╝ąĖ čüą╗ąŠčÅą╝ąĖ. ąĢčüą╗ąĖ ąŠčåąĄąĮąĖčé ąĮą░čĆąŠą┤ - ąŠčüčéą░ą▓ą╗čÄ čŹčéčā ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī. ą¤čĆąŠą▒čāą╣.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Ruzik
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ą╝ą░čĆ 30, 2018 09:11:30 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 55
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1632
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄąĮ 09, 2011 17:17:47
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 5713
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
SDimokąĢčüą╗ąĖ čĆą░ąĘą╝ąĄčĆ ą┐ą╗ą░čéčŗ ą▒ąŠą╗čīčłąŠą╣, ąĮą░ą┐čĆąĖą╝ąĄčĆ 150čģ120, č鹊 čäą░ą╣ą╗ wsp ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąŠą║ąŠą╗ąŠ 30 ą╝ą▒. ą¤ąŠč鹊ą╝ čŹč鹊 ą┤ąĄą╗ąŠ ą│čĆčāąĘąĖčéčüčÅ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝čā ąŠą║ąŠą╗ąŠ 2 ą╝ąĖąĮčāčé.  ąĢčüą╗ąĖ čéą░ą╝ ą┐ąĖčüą░čéčī ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā ąĮčāąČąĮąŠ, č鹊 ąĮąĄ ąĮą░ą┤ąŠ, ą┤ą░ ąĖ čŹč鹊 ą▓čŗčģąŠą┤ąĖčé ąĘą░ čĆą░ą╝ą║ąĖ ą┤ą░ąĮąĮąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ą┤čāą╝ą░ą╗ čéą░ą╝ ą┐čĆąŠčēąĄ ą▓čüąĄ. ą» čģąŠč鹥ą╗ čćč鹊ą▒čŗ ąĖąĘ čéą▓ąŠąĄą╣ ą┐čĆąŠą│ąĖ ą┐ąŠą╗čāčćą░ą╗čüčÅ ąĖą╝ąĄąĮąĮąŠ ą│ąĄčĆą▒ąĄčĆ, ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĄą│ąŠ ąĄčēąĄ ą│ą┤ąĄ č鹊. ąØčā ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┤ą╗čÅ ąĖąĘą│ąŠč鹊ą▓ą╗ąĄąĮąĖčÅ čłą░ą▒ą╗ąŠąĮą░ ąĮą░ ą┐ą╗ąĄąĮą║ąĄ ą┐čĆąĖ ąĖąĘą│ąŠč鹊ą▓ą╗ąĄąĮąĖąĖ ą┐ą╗ą░čéčŗ ąŠą▒čŗčćąĮčŗą╝ąĖ čüą┐ąŠčüąŠą▒ąŠą╝. ąÆ ą┐čĆąĖąĮčåąĖą┐ąĄ ąĮą░čłąĄą╗ ą▓ąĖą┤ąĄąŠ, ą│ą┤ąĄ ąĖąĘ BMP ą┐ąĄčĆąĄą▓ąŠą┤čÅčé ą▓ ą│ąĄčĆą▒ąĄčĆ... http://www.rasvector.url.tw/index_Engineer.htm http://www.rasvector.url.tw/GerberViewe ... Viewer.rarhttp://www.rasvector.url.tw/GerberViewe ... ewer64.rar64 ą▒ąĖčéąĮą░čÅ ąĮąĄ ą║ą░čćą░ąĄčéčüčÅ.  ą¦č鹊 č鹊 ą┐ąŠą┤ąŠą▒ąĮąŠąĄ ą║č鹊 ąĮąĖą▒čāą┤čī ą▓čüčéčĆąĄčćą░ą╗?
ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ čĆą░ąĘ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī Ruzik ą¤čé ą╝ą░čĆ 30, 2018 09:55:25, ą▓čüąĄą│ąŠ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī 3 čĆą░ąĘ(ą░).
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
SDimok
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ą╝ą░čĆ 30, 2018 09:48:24 |
|
| ą£čāčćąĖč鹥ą╗čī ą╝ąĖą║čĆąŠčüčģąĄą╝ |
|
ąÜą░čĆą╝ą░: 21
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1015
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ č乥ą▓ 06, 2016 14:34:29
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 480
ą×čéą║čāą┤ą░: ąĪą░čÅąĮčüą║, ąśčĆą║čāčéčüą║ą░čÅ ąŠą▒ą╗ą░čüčéčī
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąÆ ą┐čĆąĖąĮčåąĖą┐ąĄ ąĮą░čłąĄą╗ ą▓ąĖą┤ąĄąŠ, ą│ą┤ąĄ ąĖąĘ BMP ą┐ąĄčĆąĄą▓ąŠą┤čÅčé ą▓ ą│ąĄčĆą▒ąĄčĆ... ąæčāą┤ąĄčé čüąĖą╗čīąĮą░čÅ ą┐ąŠč鹥čĆčÅ ą║ą░č湥čüčéą▓ą░.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
DMUTPUUM
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ą╝ą░čĆ 30, 2018 13:27:08 |
|
| ą¤ąŠčéčĆąŠą│ą░ą╗ ą╗ą░ą┐ąŠą╣ ą┐ą░čÅą╗čīąĮąĖą║ |
 |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą░ą▓ą│ 14, 2012 13:36:38
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 360
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
čüą║ą░ąČąĖč鹥, ąĄčüčéčī čĆąĄą╝ąĄąĮčī čłą░ą│ąŠą╝ 2 ą╝ą╝. ą╝ąŠč鹊čĆ 1.875 ą│čĆą░ą┤čāčüą░ čüąŠ čłą║ąĖą▓ąŠą╝ 20 ąĘčāą▒ąŠą▓, ą║ą░ą║ ą┐ąŠčüčćąĖčéą░čéčī č鹊čćąĮąŠčüčéčī čüč鹊ą╗ą░, ą▒čāą┤ąĄčé čŹč鹊 ą▓ąŠąŠą▒čēąĄ čéčāčé čĆą░ą▒ąŠčéą░čéčī?
ą┤čĆą░ą╣ą▓ąĄčĆ ą▓čŗčüčéą░ą▓ąĖčéčī ąĮą░ 1/16 ąĮą░ A4988
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
motoAnDrEY14
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ą╝ą░čĆ 30, 2018 18:14:17 |
|
| ąÆčüčéą░ą╗ ąĮą░ ą╗ą░ą┐čŗ |
 |
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 24
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą╝ą░čĆ 06, 2009 15:29:27
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 93
ą×čéą║čāą┤ą░: ą£ąĖąĮčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
~0.208ą╝ą╝\čłą░ą│. ą¤čĆąĖ 1\16 ~0.013ą╝ą╝. ąĪ č湥ą│ąŠ čŹč鹊 ąĄą╝čā ąĮąĄ čĆą░ą▒ąŠčéą░čéčī.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
psychos
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą╝ą░čĆ 31, 2018 10:24:49 |
|
| ąÆčŗą╝ąŠą│ą░č鹥ą╗čī ą┐čĆąĖą┐ąŠčÅ |
|
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 171
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čüąĄąĮ 23, 2008 19:36:10
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 538
ą×čéą║čāą┤ą░: ą£ą░ą│ąĮąĖč鹊ą│ąŠčĆčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
SDimokąĮą░ čüą║ąŠą╗čīą║ąŠ čüą╗ąŠąČąĮąŠ ą▓ ąŠą║ąĮąĄ čü ą║ą░ą╝ąĄčĆąŠą╣ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čéą░ą║čāčÄ čäčāąĮą║čåąĖčÄ: 1) ą▓ ąĮą░čüčéčĆąŠą╣ą║ą░čģ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ(ą╝ąŠąČąĮąŠ čćąĖčüč鹊 ą▓ XML, ą░ ąĖąĮč鹥čĆč乥ą╣čü ąĮą░čüčéčĆąŠąĄą║ ąĮąĄ ąĘą░ą│čĆąŠą╝ąŠąČą┤ą░čéčī) ąĖą╝ąĄąĄą╝ ąĮą░ą▒ąŠčĆ čüą║ą░ąČąĄą╝ ąĖąĘ 16 ą║ąŠąŠčĆą┤ąĖąĮą░čé ą┤ą╗čÅ 8 čĆąĄą┐ąĄčĆąŠą▓(ą┤ą╗čÅ ą▓ąĄčĆčģą░ ąĖ ąĮąĖąĘą░ ą┐ą╗ą░čéčŗ(ąĮąĖąĘ čā ąĮą░čü ą┐ąĄčĆąĄą▓ąŠčĆą░čćąĖą▓ą░ąĄčéčüčÅ, ą░ čüąĖčüč鹥ą╝ą░ ą║ąŠąŠčĆą┤ąĖąĮą░čé ąĮąĄčé) ą░ ą▓ čüą╗čāčćą░ąĄ ą░čüąĖą╝ą╝ąĄčéčĆąĖąĖ čĆąĄą┐ąĄčĆąŠą▓ ąĮčāąČąĮąŠ ąĘąĮą░čéčī ą▓čüąĄ 16 ą║ąŠąŠčĆą┤ąĖąĮą░čé) 2) ą▓čŗą▒ąŠčĆ ąĮą░ą▒ąŠčĆą░ ą║ąŠąŠčĆą┤ąĖąĮą░čé ą┤ą╗čÅ ą▓ąĄčĆčģą░ ąĖą╗ąĖ ąĮąĖąĘą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ąĮą░ąČą░č鹊ą╣ ą║ąĮąŠą┐ą║ąŠą╣ "ąĘąĄčĆą║ą░ą╗ąŠ ą┐ąŠ ąź" 3) ą║ąĮąŠą┐ą║ą░ą╝ąĖ ąĮą░ NumPad 1-8 ą┐ąĄčĆąĄą╝ąĄčēą░ąĄą╝ ą║ą░čĆąĄčéą║čā ą▓ ąĘą░ą┤ą░ąĮąĮčŗąĄ ą▓ ąĮą░čüčéčĆąŠą╣ą║ą░čģ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ. ą║ąĮąŠą┐ą║ąŠą╣ 0 ą▓čüąĄą│ą┤ą░ ą┐čĆąĖčģąŠą┤ąĖą╝ ą┐ąŠ ą║ąŠąŠčĆą┤ąĖąĮą░čéą░ą╝ ąź0 Y0 4) ą▓ ąŠą║ąĮąĄ čü ą║ą░ą╝ąĄčĆąŠą╣ ą║ąŠąŠčĆąĄą║čéąĖčĆąŠą▓ą░čéčī ąĮą░čćą░ą╗ąŠ ą║ąŠąŠčĆą┤ąĖąĮą░čé(čāčüčéą░ąĮąŠą▓ąĖčéčī čüą╝ąĄčēąĄąĮąĖąĄ ąĮą░čćą░ą╗ą░ ą║ąŠąŠčĆą┤ąĖąĮą░čé), čüąĄą╣čćą░čü ą┐čĆąĖčģąŠą┤ąĖčéčüčÅ ąĄčģą░čéčī ą▓ č鹊čćą║čā čüą╝ąĄčēąĄąĮąĖčÅ ąĖ čéą░ą╝ ą╝ąĄąĮčÅčéčī ąĮą░čćą░ą╗ąŠ ą║ąŠąŠčĆą┤ąĖąĮą░čé. ą£ąŠąČąĮąŠ ąĄčēčæ ą┤ąŠą▒ą░ą▓ąĖčéčī ą│ą░ą╗ą║čā "čāč湥čüčéčī čüą╝ąĄčēąĄąĮąĖąĄ ą┐ąŠ ą║ą░ą╝ąĄčĆąĄ" ą┐čĆąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĖ ąĮą░čćą░ą╗ą░ ą║ąŠąŠčĆą┤ąĖąĮą░čé, čŹč鹊čé ą┐ąŠąĘą▓ąŠą╗ąĖčé čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ą┐čĆąĖąĮčÅčéąĖąĖ čĆąĄčłąĄąĮąĖčÅ ąŠ ą║ąŠąŠčĆąĄą║čéąĖčĆąŠą▓ą║ąĄ ąĮą░čćą░ą╗ą░ ą║ąŠąŠčĆą┤ąĖąĮą░čé čüčĆą░ąĘčā ąĮą░čćą░čéčī 菹║čüą┐ąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ. ąóąŠąČąĄ ą▓čĆąĄą╝čÅ čŹą║ąŠąĮąŠą╝ąĖą╝ ą×č湥ąĮčī čāčüą║ąŠčĆąĖą╗ąŠ ą▒čŗ ą▒ąĄą│ąŠčéąĮčÄ ą┐ąŠ čüč鹊ą╗čā ąĖ ą┐čĆąŠčåąĄčüčü ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖčÅ ą┐ą╗ą░čéčŗ.  ąŻ ą╝ąĄąĮčÅ ą┐čĆąŠčåąĄčüčü ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖčÅ ąĘą░ą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╝: 1) ą║ą╗ą░ą┤čā ą┐ą╗ą░čéčā ąĮą░ čüč鹊ą╗ 2) ą║ą░ą╝ąĄčĆąŠą╣ ą┐ąŠ ą║čĆąŠą╝ą║ą░ą╝ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ čĆąŠą▓ąĮčÅčÄ ą┐ą╗ą░čéčā 3) ą┐ąŠ ą▒ą╗ąĖąČą░ą╣čłąĖą╝ čāą│ą╗ąŠą▓čŗą╝ čĆąĄą┐ąĄčĆą░ą╝ ą▓čŗčüčéą░ą▓ą╗čÅčÄ 0 ąźY 4) ą┐čĆąŠąĄąĘąČą░čÄ ą┐ąŠ 6 čĆąĄą┐ąĄčĆą░ą╝, ą▓ąĄčĆčģąĮąĖąĄ 2 ą┐ąŠą║ą░ ąĮąĄ ąĘą░čģą▓ą░čéčŗą▓ą░čÄčéčüčÅ, čüč鹊ą╗ čćčāčéčī ą┐ąĄčĆąĄą┤ąĄą╗ą░čéčī ąĮą░ą┤ąŠ 5) ąĘą░ąĮąŠčłčā ą▓ čéą░ą▒ą╗ąĖčćą║čā, 6) čüą╝ąŠčéčĆčÄ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą┐ą╗ą░čéčŗ ąĮą░ ą┤ąĖą░ą│čĆą░ą╝ą╝ąĄ, čüą╝ąŠčéčĆą▒ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą║ą░ą║ąŠą╣ č鹊čćą║ąĖ ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą┐ąŠą▓ąŠčĆąŠčé, ą┐ąŠą▓ąŠčĆą░čćąĖą▓ą░čÄ 7) čüąĮąŠą▓ą░ čüąĮąĖą╝ą░čÄ 6 č鹊č湥ą║, ąĄčüą╗ąĖ ą▓čüčæ čģąŠčĆąŠčłąŠ(ą┐ąŠą▓ąŠčĆąŠčé ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ). ą║ąŠčĆčĆąĄą║čéąĖčĆčāčÄ ąĮą░čćą░ą╗ąŠ ą║ąŠąŠčĆą┤ąĖąĮą░čé  ąĮą░čćąĖąĮą░ąĄą╝ 菹║čüą┐ąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ
ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ čĆą░ąĘ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī psychos ąĪą▒ ą╝ą░čĆ 31, 2018 12:00:43, ą▓čüąĄą│ąŠ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī 1 čĆą░ąĘ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
mial
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą╝ą░čĆ 31, 2018 11:55:58 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 94
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2197
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čÅąĮą▓ 06, 2010 23:31:56
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3242
ą×čéą║čāą┤ą░: ąæąŠčĆąŠą▓ąĖčćąĖ, ąØąŠą▓ą│. ąŠą▒ą╗.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
")
|
psychos ą┐čĆąŠčćąĖčéą░ą╗, ąĮąĖč湥ą│ąŠ ąĮąĄ ą┐ąŠąĮčÅą╗, ą║ą░ą║ č鹊 ą▓čüąĄ čüą╗ąŠąČąĮąŠ čā ą▓ą░čü.  SDimok SDimok ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░ą╗ ą▓ą░čłčā ą▓ąĄčĆčüąĖčÄ. ąĢčüčéčī ąŠą┤ąĮąŠ ą┐ąŠąČąĄą╗ą░ąĮąĖąĄ, čģąŠčéčÅ ą╝ąŠąČąĄčé čŹč鹊 čāąČąĄ ąĄčüčéčī, ą░ čÅ ą┐čĆąŠčüč鹊 ąĮąĄ čĆą░ąĘąŠą▒čĆą░ą╗čüčÅ čü ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ. ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐ąŠ čüč鹊ą╗čā ąĘą░ą┤ą░ąĄą╝ ą▓ ą│ą╗ą░ą▓ąĮąŠą╝ ąŠą║ąĮąĄ ąĮą░čüčéčĆąŠąĄą║. ąÆ čĆčāčćąĮąŠą╝ čĆąĄąČąĖą╝ąĄ Shift+čüčéčĆąĄą╗ą║ą░ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ąĖą┤ąĄčé čü čŹčéąĖą╝ ąČąĄ čłą░ą│ąŠą╝. ąÜ ą┐čĆąĖą╝ąĄčĆčā čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čłą░ą│ 35 ą╝ąĖą║čĆąŠąĮ, ą▓ čĆčāčćąĮąŠą╝ čĆąĄąČąĖą╝ąĄ č鹊ąČąĄ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ 35 ą╝ąĖą║čĆąŠąĮ ąĮą░ čłą░ą│. ąŁč鹊 ąĮąĄ ąŠč湥ąĮčī čāą┤ąŠą▒ąĮąŠ ą┐čĆąĖ ą┐čĆąĖą▓čÅąĘą║ąĄ ą║ čĆąĄą┐ąĄčĆčā ąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą║ą░ą╝ąĄčĆčŗ. ą©ą░ą│ ą▓ąĄą╗ąĖą║ąŠą▓ą░čé, ąĖ čéčāą┐ąŠ čåąĄąĮčéčĆ ą┐ąĄčĆąĄą╗ąĄčéą░ąĄą╝. ąÆ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą░ą▓č鹊čĆą░ čłą░ą│ čĆčāčćąĮąŠą│ąŠ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┐čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ 400 čłą░ą│ąŠą▓ ąĮą░ 1000 ą╝ą║ą╝ čĆą░ą▓ąĄąĮ 10 ą╝ą║ą╝. ą¦č鹊 ą▓ą┐ąŠą╗ąĮąĄ ą┤ąŠčüčéą░č鹊čćąĮąŠ ąĖ ą┤ą╗čÅ č鹊čćąĮąŠą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ą║ą░ą╝ąĄčĆčŗ, ąĖ ą┤ą╗čÅ ą┐čĆąĖą▓čÅąĘą║ąĄ ą║ čĆąĄą┐ąĄčĆčā. ą£ąŠąČąĮąŠ ą╗ąĖ čüą┤ąĄą╗ą░čéčī čéą░ą║ ąČąĄ ą▓ čĆčāčćąĮąŠą╝ čĆąĄąČąĖą╝ąĄ, ąĖą╗ąĖ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą▓čŗą▒ąŠčĆ čłą░ą│ą░ ąŠą┤ąĮąŠą│ąŠ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ Shift+čüčéčĆąĄą╗ą║ą░ ą┤ą╗čÅ čĆčāčćąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ ąŠčéą┤ąĄą╗čīąĮąŠ.
_________________
ą¤čĆąŠč鹊čéąĖą┐čŗ ą┐ąĄčćą░čéąĮčŗčģ ą┐ą╗ą░čé ąĮą░ ąĘą░ą║ą░ąĘ https://radiokot.ru/forum/viewtopic.php?f=54&t=122701
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
psychos
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą╝ą░čĆ 31, 2018 12:09:32 |
|
| ąÆčŗą╝ąŠą│ą░č鹥ą╗čī ą┐čĆąĖą┐ąŠčÅ |
|
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 171
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čüąĄąĮ 23, 2008 19:36:10
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 538
ą×čéą║čāą┤ą░: ą£ą░ą│ąĮąĖč鹊ą│ąŠčĆčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
psychos ą┐čĆąŠčćąĖčéą░ą╗, ąĮąĖč湥ą│ąŠ ąĮąĄ ą┐ąŠąĮčÅą╗, ą║ą░ą║ č鹊 ą▓čüąĄ čüą╗ąŠąČąĮąŠ čā ą▓ą░čü. čüą╗ąŠąČąĮąŠ ą┐ąŠč鹊ą╝čā, čćč鹊: 1) čĆą░ąĘą▒ąĖčéčŗ ą▓čéčāą╗ą║ąĖ ąĮą░ čüą▓ąĄčĆą╗ąĖą╗ą║ąĄ, ąŠčéą▓ąĄčĆčüčéąĖčÅ ą╝ą░ą╗ąĄąĮčīą║ąŠ ą┐ą╗čÅčłčāčé, ąĮčāąČąĮąŠ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī čäčāąĮą║čåąĖčÄ ą░ąĮčéąĖą╗čÄčäčé ą▓ ą╝ą░čéč湥, ą╝ąŠąČąĄčé ą┐ąŠą╝ąŠąČąĄčé 2) ąĮąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ čüčéą░ą▓ąĖčéčī čĆąĄą┐ąĄčĆčŗ ą┐ąŠ čāą│ą╗ą░ą╝ ą┐ą╗ą░čéčŗ, ą░ ą│ąŠčĆąŠą┤ąĖčéčī čüą╗ąŠčé - ą┐čĆąŠą▒ąŠą▓ą░ą╗, čüčéą░ą▓ąĖčéčī čāą┐ąŠčĆčŗ ąĮą░ čüč鹊ą╗ąĄ, ąĮąŠ ąĮąĄ ą▓čüąĄą│ą┤ą░ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ č鹊čćąĮąŠ ąŠą▒čĆąĄąĘą░čéčī ą║čĆą░čÅ č乊č鹊čĆąĄąĘą░čüčéą░, ą╗ą░čģą╝ąŠčéčīčÅ ąĮąĄ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé č鹊čćąĮąŠ ą┐ą╗ą░čéčā "čāą┐ąĄčĆąĄčéčī". čÅ ą╗ąĖčłčī ą┐čĆąŠčłčā ą▓ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ ą║ąĮąŠą┐ą║ą░ą╝ HOME END pGup PgDn ą┤ąŠą▒ą░ą▓ąĖčéčī čäčāąĮą║čåąĖąŠąĮą░ą╗ ą║ ą║ąĮąŠą┐ą║ą░ą╝ 0-8 ąĮčāą╝ą┐ą░ą┤ą░ čü ąĘą░čĆą░ąĮąĄąĄ ąĘą░ą╗ąŠąČąĄąĮąĮčŗą╝ąĖ čĆą░ąĘą┤ąĄą╗čīąĮčŗą╝ąĖ ą║ąŠąŠčĆą┤ąĖąĮą░čéą░ą╝ąĖ ą┤ą╗čÅ ą▓ąĄčĆčģą░ ąĖ ąĮąĖąĘą░. čü čćčæčéą║ąŠą╣ čüąĖą╝ą╝ąĄčéąĖąĄą╣ čā ą╝ąĄąĮčÅ ą┐ąŠą║ą░ ąĮąĄ ą┐ąŠą╗čāčćąĖčéčüčÅ, čé.ą║. ąĮą░ ą║ąĖčéą░ą╣čüą║ąŠą╣ čüą▓ąĄčĆą╗ąĖą╗ą║ąĄ ąĮąĄčé ą│ąĄąŠą╝ąĄčéčĆąĖąĖ. ą░ čŹč鹊čé ą▓ąŠą┐čĆąŠčü čĆą░čüčéčÅą│ąĖą▓ą░ąĄčéčüčÅ ą┤ąŠ ą┐ąŠčüčéčĆąŠąĄąĮąĖčÅ ąĮąŠą▓ąŠą│ąŠ čüčéą░ąĮą║ą░.ąóą░ą║ čćč鹊 ą┐ąŠą║ą░ ą▓čŗčģąŠą┤ č鹊ą╗čīą║ąŠ ą┐čĆą░ą▓ąĖčéčī ą│ąĄąŠą╝ąĄčéčĆąĖčÄ čĆąĖčüčāąĮą║ą░. ąŻ ą╝ąĄąĮčÅ ą┐ąŠčüą╗ąĄ čüą▓ąĄčĆą╗ąĄąĮąĖčÅ čüčāą┤čÅ ą┐ąŠ ąŠčéą▓ąĄčĆčüčéąĖčÅą╝ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąĖčüą║čĆąĖą▓ą╗čæąĮąĮčŗą╣ ą┐čĆčÅą╝ąŠčāą│ąŠą╗ąĮčŗą╣ ą┐ą░čĆą░ą╗ą╗ąĄą┐ąĖą┐ąĄą┤ čü ą▓čŗčłąĄąŠą┐ąĖčüą░ąĮąĮąŠą╣ ą╝ąĄč鹊ą┤ąŠą╣ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą┐ąŠą┐ą░ą┤ą░čéčī čĆąĖčüčāąĮą║ąŠą╝ ą▓ ąŠčéą▓ąĄčĆčüčéąĖčÅ čü ą┐ąŠą│čĆąĄčłąĮąŠčüčéčīčÄ +/- 0,130 ą╝ą╝. ąÆą░čĆąĖą░ąĮčé čü čłčéąĖčäčéą░ą╝ąĖ ąĮąĄ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ, čé.ą║. ą┐ąŠą║ą░ ąĮąĄ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ čüą▓ąĄčĆą╗ąĖčéčī čłčéąĖčäčéčŗ čü ąĖčģ ą┐ą╗ąŠčéąĮąŠą╣ ą┐ąŠčüą░ą┤ą║ąŠą╣ ą▓ čüč鹊ą╗ ąĖ ą▒ąĄąĘ ą╗čÄčäčéą░ ąĮą░čüą░ą┤ąĖčéčī ą┐ą╗ą░čéčā. ąÜčĆąŠąĄą╝ ąĄč鹊ą│ąŠ ą▓ čüą▓ąĄčĆą╗ąĖą╗ą║čā ąĮčāąČąĮąŠ ą▓ą▓ąŠą┤ąĖčéčī ą║ąŠąĮčåąĄą▓ąĖą║ąĖ, čćč鹊ą▒čŗ ą▒čŗą╗ąĖ ą┐ąŠčüč鹊čÅąĮąĮčŗąĄ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
SDimok
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą╝ą░čĆ 31, 2018 17:04:48 |
|
| ą£čāčćąĖč鹥ą╗čī ą╝ąĖą║čĆąŠčüčģąĄą╝ |
|
ąÜą░čĆą╝ą░: 21
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1015
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ č乥ą▓ 06, 2016 14:34:29
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 480
ą×čéą║čāą┤ą░: ąĪą░čÅąĮčüą║, ąśčĆą║čāčéčüą║ą░čÅ ąŠą▒ą╗ą░čüčéčī
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąĢčüčéčī ąŠą┤ąĮąŠ ą┐ąŠąČąĄą╗ą░ąĮąĖąĄ... ąĪą┤ąĄą╗ą░čÄ ą║ą░ą║ ą┐ąŠąČąĄą╗ą░ąĄč鹥 ą» čéą░ą║ ą┐ąŠąĮčÅą╗... ą▓ąŠą┐čĆąŠčü č鹊ą╗čīą║ąŠ ą┐ąŠ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÄ čüč鹊ą╗ą░?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
SDimok
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą╝ą░čĆ 31, 2018 17:31:58 |
|
| ą£čāčćąĖč鹥ą╗čī ą╝ąĖą║čĆąŠčüčģąĄą╝ |
|
ąÜą░čĆą╝ą░: 21
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1015
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ č乥ą▓ 06, 2016 14:34:29
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 480
ą×čéą║čāą┤ą░: ąĪą░čÅąĮčüą║, ąśčĆą║čāčéčüą║ą░čÅ ąŠą▒ą╗ą░čüčéčī
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąĮą░ čüą║ąŠą╗čīą║ąŠ čüą╗ąŠąČąĮąŠ ą▓ ąŠą║ąĮąĄ čü ą║ą░ą╝ąĄčĆąŠą╣ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čéą░ą║čāčÄ čäčāąĮą║čåąĖčÄ... ąÜą░ą║ č鹊 ąĮąĄ ąŠč湥ąĮčī ą┐ąŠąĮčÅčéąĮąŠ ąÆąŠčé ąĮą░ą┐čĆąĖą╝ąĄčĆ ą▓ąŠčé čŹč鹊: 3) ą║ąĮąŠą┐ą║ą░ą╝ąĖ ąĮą░ NumPad 1-8 ą┐ąĄčĆąĄą╝ąĄčēą░ąĄą╝ ą║ą░čĆąĄčéą║čā ą▓ ąĘą░ą┤ą░ąĮąĮčŗąĄ ą▓ ąĮą░čüčéčĆąŠą╣ą║ą░čģ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ. ą║ąĮąŠą┐ą║ąŠą╣ 0 ą▓čüąĄą│ą┤ą░ ą┐čĆąĖčģąŠą┤ąĖą╝ ą┐ąŠ ą║ąŠąŠčĆą┤ąĖąĮą░čéą░ą╝ ąź0 Y0
ąæčāą┤ąĄčé ąŠč湥ąĮčī ąĮąĄ č鹊čćąĮąŠ, čéą░ą║ ą║ą░ą║ ąŠčüčī ąź ą┐ąŠ 菹Įą║ąŠą┤ąĄčĆąĮąŠą╣ ą╗ąĄąĮč鹥 ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ąŠčüčéą░ąĮąŠą▓ąĖčéčīčüčÅ ą▓ ąĘą░ą┤ą░ąĮąĮąŠą╣ č鹊čćą║ąĄ. ąĪč鹊ą╗ - ą┤ą░, ą┐čĆąĖą┤ąĄčé č鹊čćąĮąŠ - čéą░ą╝ ą©ąö, ą░ ą║ą░čĆąĄčéą║ą░ ąĮąĖą║ąŠą│ą┤ą░, ą┤ą░ąČąĄ ąĄčüą╗ąĖ ąŠč湥ąĮčī ą╝ąĄą┤ą╗ąĄąĮąĮąŠ čüą┤ąĄą╗ą░čéčī. ąŻ ą╝ąĄąĮčÅ ą┐čĆąŠčåąĄčüčü ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖčÅ ąĘą░ą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╝ : 1) ą║ą╗ą░ą┤čā ą┐ą╗ą░čéčā ąĮą░ čüč鹊ą╗ 2) ą║ą░ą╝ąĄčĆąŠą╣ ą┐ąŠ ąĮąĖąČąĮąĖą╝ ą┤ą▓čāą╝ čĆąĄą┐ąĄčĆą░ą╝ čĆąŠą▓ąĮčÅčÄ ą┐ą╗ą░čéčā 3) ą║ąĮąŠą┐ą║ąŠą╣ F2 ą┐čĆąĖą▓čÅąĘčŗą▓ą░čÄčüčī ą║ ą╗ąĄą▓ąŠą╝čā ąĮąĖąČąĮąĄą╝čā čĆąĄą┐ąĄčĆčā 4) ą╗ąĖą▒ąŠ ą║ąĮąŠą┐ą║ąŠą╣ F3 ą┐čĆąĖą▓čÅąĘčŗą▓ą░čÄčüčī ą║ ą┐čĆą░ą▓ąŠą╝čā ąĮąĖąČąĮąĄą╝čā čĆąĄą┐ąĄčĆčā (ąĄčüą╗ąĖ ą┤ąĄą╗ą░čÄ ąŠą▒čĆą░čéąĮčāčÄ čüč鹊čĆąŠąĮčā) 5) ąĮą░čćąĖąĮą░čÄ čŹą║čüą┐ąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ. ąöą╗čÅ čāą┤ąŠą▒čüčéą▓ą░ ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖčÅ ąĮą░ ą╝ąĄčüč鹥 ą╗ąĄą▓ąŠą│ąŠ ąĮąĖąČąĮąĄą│ąŠ čĆąĄą┐ąĄčĆą░ čā ą╝ąĄąĮčÅ ąĮą░ čüč鹊ą╗ąĄ čüč鹊ąĖčé ąĖą│ą╗ą░. ąØą░ ąĮąĄąĄ čÅ ąŠą┤ąĄą▓ą░čÄ ą╗ąĄą▓čŗą╣ ąĮąĖąČąĮąĖą╣ čĆąĄą┐ąĄčĆ ąĖ ąŠąĮ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮčŗą╣. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 4 minutes 38 seconds:ąĮąĄ ąĘąĮą░čÄ ą║ą░ą║ ą┤čĆčāą│ąĖąĄ, čÅ ą║ą░čĆąĄčéą║čā č鹊čćąĮąŠ ą▓čŗčüčéą░ą▓ą╗čÅčÄ čĆčāą║ą░ą╝ąĖ. č鹊ąČąĄ čüčéą░ą▓ą╗čÄ čĆčāą║ą░ą╝ąĖ, čéą░ą║ ą║ą░ą║ čü ą║ąĮąŠą┐ąŠą║ ąĮąĄ ą┐ąŠą╣ą╝ą░čéčī ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 5 minutes 9 seconds:ą£ąŠąČąĮąŠ ąĄčēčæ ą┤ąŠą▒ą░ą▓ąĖčéčī ą│ą░ą╗ą║čā "čāč湥čüčéčī čüą╝ąĄčēąĄąĮąĖąĄ ą┐ąŠ ą║ą░ą╝ąĄčĆąĄ" ąĪą╝ąĄčēąĄąĮąĖąĄ ą▓ąĄą╗ąĖčćąĖąĮą░ ą┐ąŠčüč鹊čÅąĮąĮą░čÅ, ąĖ ą┐čĆąĖ 菹║čüą┐ąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĖ čāčćąĖčéčŗą▓ą░ąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
psychos
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą╝ą░čĆ 31, 2018 18:50:06 |
|
| ąÆčŗą╝ąŠą│ą░č鹥ą╗čī ą┐čĆąĖą┐ąŠčÅ |
|
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 171
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čüąĄąĮ 23, 2008 19:36:10
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 538
ą×čéą║čāą┤ą░: ą£ą░ą│ąĮąĖč鹊ą│ąŠčĆčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
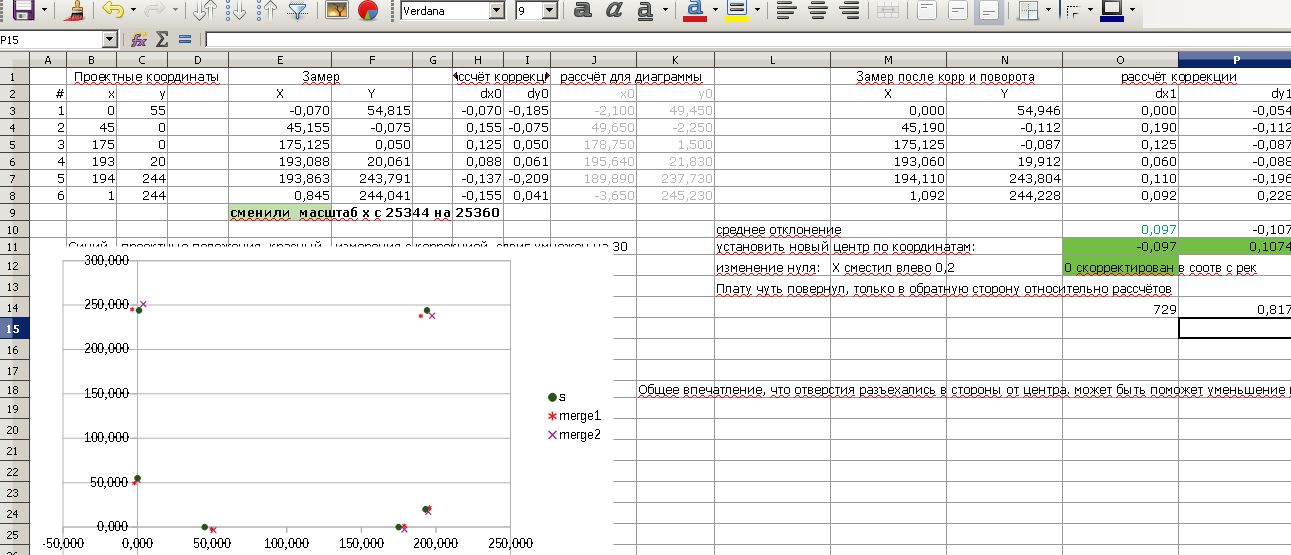
SDimok ą▒ą╗ą░ą│ąŠą┤ą░čĆčÄ ąĘą░ ąŠčéą║ą╗ąĖą║: ą┐čĆąĖą▓ąŠąČąČčā ą▓ąŠą╗čīąĮčŗą╣ ą┐čĆąĖą╝ąĄčĆ ą║ąŠąĮčäąĖą│ą░: [numPadBtnTop] // ą║ąŠąĮčüčéą░ąĮčéčŗ ą║ąŠąŠčĆą┤ąĖąĮą░čé x;y čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ą║ąĮąŠą┐ą║ą░ą╝ ą┐čĆąĖ ąĮąĄ ąĮą░ąČą░č鹊ą╣ ą│ą░ą╗ą║ąĄ(ąŚą░čĆą║ą░ą╗ąŠ ą┐ąŠ ąź) ą▓ ąŠčüąĮąŠą▓ąĮąŠą╣ č乊čĆą╝ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ (č鹊 ąĄčüčéčī ą┐ąŠą╗ąŠą│ą░ąĄą╝ č鹊 čćč鹊 菹║čüą┐ąŠąĮąĖčĆčāąĄą╝ ą▓ąĄčĆčģąĮąĖą╣ čüą╗ąŠą╣) 0=0;0 1=0;55 2=45;0 3=175;0 4=193;20 5=194;244 6=1;244 [numPadBtnBottom] // ą║ąŠąĮčüčéą░ąĮčéčŗ ą║ąŠąŠčĆą┤ąĖąĮą░čé x;y čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ą║ąĮąŠą┐ą║ą░ą╝ ą┐čĆąĖ ąØąÉą¢ąÉąóą×ąÖ ą│ą░ą╗ą║ąĄ(ąŚą░čĆą║ą░ą╗ąŠ ą┐ąŠ ąź) ą▓ ąŠčüąĮąŠą▓ąĮąŠą╣ č乊čĆą╝ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ (č鹊 ąĄčüčéčī ą┐ąŠą╗ą░ą│ą░ąĄą╝ č鹊 čćč鹊 菹║čüą┐ąŠąĮąĖčĆčāąĄą╝ ąĮąĖąČąĮčŗą╣ čüą╗ąŠą╣) 0=0;0 1=1;20 2=19;0 3=149;0 4=194;55 5=193;244 6=0;244 ąøąŠą│ąĖą║ą░: ąĄčüą╗ąĖ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ ąŠą║ąĮąĄ ą┐čĆąĖčåąĄą╗ąĖą▓ą░ąĮąĖčÅ ąĮąĄ ąĮą░ąČą░čéą░ ą│ą░ą╗ą║ą░ ąĘąĄčĆą║ą░ą╗ąŠ ą┐ąŠ ąź, č鹊 čĆą░ą▒ąŠčéą░ąĄą╝ ą┐ąŠ ąĮą░ą▒ąŠčĆčā [numPadBtnTop]. ąĮą░ąČą░ą╗ąĖ ą║ąĮąŠą┐ą║čā 4, ą┐čĆąĖąĄčģą░ą╗ąĖ ą┐ąŠ ą║ąŠąŠčĆą┤ąĖąĮą░č鹥 X 193 Y 20. ą┐ąĄčĆąĄą▓ąĄčĆąĮčāą╗ąĖ ą┐ą╗ą░čéčā, ąĮą░ąČą░ą╗ąĖ ą│ą░ą╗ą║čā ąĘąĄčĆą║ą░ą╗ąŠ ą┐ąŠ ąź, ą▓ ąŠą║ąĮąĄ ą┐čĆąĖčåąĄą╗ąĖą▓ą░ąĮąĖčÅ ąĮą░ąČą░ą╗ąĖ ąĄąĮąŠą┐ą║čā 2, ą┐čĆąĖąĄčģą░ą╗ąĖ ą┐ąŠ ą░ą┤čĆąĄčüčā X19 Y0 ą¤ąŠ ą┐ąŠąĘąĖčåąĖąĖ ąź, č鹊ąČąĄ ą┐ąŠą┤ą║čĆčāčćąĖą▓ą░čÄ čĆčāą║ą░ą╝ąĖ. ą▒čŗą▓ą░ąĄčé ą┐ąŠą┤čĆčŗą│ą░ąĄčłčī ąĖ ą┐čĆąĖą╗ąĄčéą░ąĄčé č鹊čćąĮąŠ ą▓ čåąĄą╗čī. ąÜąŠą│ą┤ą░ ą┐čĆąĖą╝ąĄčĆąĮąŠ ą▓ąĖą┤ąĖčłčī čĆą░čüčüč鹊čÅąĮąĖąĄ, ą╝ąŠąČąĮąŠ ą▓ ą│ąŠą╗ąŠą▓ąĄ ą┤ąŠą┤čāą╝ą░čéčī ą┐čĆąĖą╝ąĄčĆąĮčāčÄ ą║ąŠąŠčĆą┤ąĖąĮą░čéčā ą┐ąŠ ąź. ąōą╗ą░ą▓ąĮąŠąĄ čćč鹊ą▒čŗ ąŠčéą▓ąĄčĆčüąĖč鹥 ą┐čĆąĖąĄčģąŠą╗ąŠ ą▓ ą║ą░ą╝ąĄčĆčā, ą┤ą░ą╗čīčłąĄ čĆčāą║ą░ą╝ąĖ. ą¤čĆąŠčåąĄą┤čāčĆą░ ą┐ąŠą▓ąŠčĆąŠčéą░ čéą░ą║ą░čÅ,, čüą╝ąŠčéčĆąĖą╝ ąĮą░ č鹊čćą║ąĖ ąŠą▒ą╗ą░čüčéčī ą┐ą╗ą░čéčŗ ą│ą┤ąĄ ą▓čüąĄ č鹊čćą║ąĖ ą▒ąŠą╗ąĄąĄ ą╝ąĄąĮąĄąĄ čüąŠą▓ą┐ą░ą┤ą░čÄčé, ąĖ ąĮą░ č鹥 č鹊čćą║ąĖ ą║ąŠč鹊čĆčŗąĄ ąĮąĄ čüąŠą▓ą┐ą░ą┤ą░čÄčé. ą┐čĆąĖąĮąĖą╝ąĄą╝ čĆąĄčłąĄąĮąĖąĄ ą▓ąŠą║čĆčāą│ ą║ą░ą║ąŠą╣ č鹊čćą║ąĖ ą▓ąĄčĆč鹥čéčī ąĖ ą║ą░ą║čāčÄ ą┐ąŠą┤čüčéčĆą░ąĖą▓ą░čéčī. ąĄą┤ąĄą╝ ą║ą░ą╝ąĄčĆąŠą╣ ą▓ čåąĄą╗ąĄą▓čŗąĄ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ, ą▓ąĖą┤ąĄą╝ čāąĄčģąŠą▓čłąĄąĄ ąŠčéą▓ąĄčĆčüčéąĖąĄ. ą┐čĆąĖąČąĖą╝ą░ąĄą╝ ą┐ą░ą╗čīčåąĄą╝ ą┐ą╗ą░čéčā ą║ čüč鹊ą╗čā ą▓ č鹊ą╣ č鹊čćą║ąĄ, ą▓ąŠą║čĆčāą│ ą║ąŠč鹊čĆąŠą╣ ą▓ąĄčĆčéąĖą╝, ą░ ą║ą░ą╝ąĄčĆąŠą╣ ąĮą░ą▒ą╗čÄą┤ą░čÅ ą┐čĆąĖą▓ąŠą┤ąĖą╝ ąĮąĄą┐ąŠčüą╗čāčłąĮčāčÄ č鹊čćą║čā ą▓ ą┐čĆąĖčåąĄą╗. ą▓čüčæ. ąÆ ąĖą┤ąĄą░ą╗ąĄ ąĮąĄ ą┐ąŠą╝ąĄčłą░ą╗ą░ ą▒čŗ ą│čĆą░čäąĖč湥čüą║ą░čÅ ą║ąŠčĆčĆąĄą║čåąĖčÅ, ąĮąŠ čÅ čćčāčÄ čŹč鹊 čüą╗ąŠąČąĮąŠ ąĖ čüą╗ąŠąČąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą░ąĮąĖąĘąŠčéčĆąŠą┐ąĮčāčÄ čäąĖą╗čīčéčĆą░čåąĖčÄ ą┐ąŠčŹč鹊ą╝čā ą┐ąŠą║ą░ ą┐ąŠą▓ąĄčĆčéąĖą╝, ą╝ąŠąČąĄčé ą┐čĆąĖą┤čāą╝ą░čÄ ą║ąŠąĮčüčéčĆčāą║čåąĖčÄ ą┐ąŠą▓ąŠčĆąŠčéąĮąŠą│ąŠ čüč鹊ą╗ą░... čćč鹊ą▒ ąĖ ą┐ą╗ąŠčüą║ąŠčüčéčī ąĮąĄ č鹥čĆčÅą╗ ąĖ ą▓ąĄčĆč鹥ą╗čüčÅ. č鹊ą│ą┤ą░ ą▓ąŠąŠą▒čēąĄ ą┐čĆąŠčåąĄčüčü ą▒čāą┤ąĄčé ąĘą░ą║ą╗čÄčćą░čéčüčīčÅ ą▓ ąŠčéčüčéčĆąĄą╗ąĄ ąŠčéą▓ąĄčĆčüčéąĖą╣ ąĖ ą░ąĮą░ą╗ąĖąĘčā ą▒ą░ąĘąŠą▓čŗčģ ą║ąŠąŠčĆą┤ąĖąĮą░čé, ą┤ą░ą╗čīčłąĄ čüčćąĖčéą░ąĄą╝ ąŠčéą║čāą┤ą░ ą║čāą┤ą░ ą▓ąŠą║čĆčāą│ č湥ą│ąŠ ą▓ąĄčĆč鹥čéčī. ąĢčüą╗ąĖ ąĄčēčæ ą▓ čåąĖą║ą╗ąĄ ą┐čĆąĖ čŹč鹊ą╝ ąĄąĘą┤ąĖčéčī ą┐ąŠ čĆąĄą┐ąĄčĆą░ą╝ ąĖ čüą┤ąĄą╗ą░čéčī ą░ąĮą░ą╗ąĖąĘ ą║ąŠąĮčéčĆą░čüčéąĮąŠčüčéąĖ ą║ąŠąĮčéčāčĆąŠą▓ ą▓ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖąĖ, ą▓ąŠąŠą▒čēąĄ čüą║ą░ąĘą║ą░ ą▒čŗą╗ą░ ą▒čŗ ąæčĆąŠčüąĖą╗ ą┐ą╗ą░čéčā, ą┐ąŠąĄą╗ čćą░ą╣ ą┐ąĖčéčī. ąĮą░ ą┐ąŠą╗č鹊čĆą░ čćą░čüą░. ąĘčāą╝ą╝ąĄčĆ ą┐čĆąŠą┐ąĖčēą░ą╗, ą┐ąĄčĆąĄą▓ąĄčĆąĮčāą╗, ą┐ąŠčłąĄą╗ čü ą┤ąĄčéčīą╝ąĖ ą▒ąĄčüąĖčéčīčüčÅ...
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
SDimok
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą░ą┐čĆ 01, 2018 02:29:40 |
|
| ą£čāčćąĖč鹥ą╗čī ą╝ąĖą║čĆąŠčüčģąĄą╝ |
|
ąÜą░čĆą╝ą░: 21
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1015
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ č乥ą▓ 06, 2016 14:34:29
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 480
ą×čéą║čāą┤ą░: ąĪą░čÅąĮčüą║, ąśčĆą║čāčéčüą║ą░čÅ ąŠą▒ą╗ą░čüčéčī
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą┐čĆąĖą▓ąŠąČąČčā ą▓ąŠą╗čīąĮčŗą╣ ą┐čĆąĖą╝ąĄčĆ ą║ąŠąĮčäąĖą│ą░ ąÆ ą┤ą░ąĮąĮčŗą╣ ą╝ąŠą╝ąĄąĮčé ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą┐ąŠą▓ąŠčĆąŠčé ą┐ąŠ ą┤ą▓čāą╝ č鹊čćą║ą░ą╝, ąØą× .... ąōą┤ąĄ č鹊 čÅ ą▓ ą╝ą░č鹥ą╝ą░čéąĖą║ąĄ ąŠčłąĖą▒čüčÅ ą╝ą░ą╗ąĄąĮčīą║ąŠ, ąĮąĄ ą┐ąŠą╣ą╝čā ą│ą┤ąĄ. ąĪą╝čŗčüą╗ čéą░ą║ąŠą╣: ą¤ąŠą┤čŖąĄčģą░ą╗ąĖ ą║ą░ą╝ąĄčĆąŠą╣ ą║ ą╗ąĄą▓ąŠą╝čā ąĮąĖąČąĮąĄą╝čā čĆąĄą┐ąĄčĆčā - ąŠčéą╝ąĄčéąĖą╗ąĖ, ą┐ąŠą┤čŖąĄčģą░ą╗ąĖ ą║ ą┐čĆą░ą▓ąŠą╝čā čĆąĄą┐ąĄčĆčā, ąŠčéą╝ąĄčéąĖą╗ąĖ. ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąŠčüčćąĖčéą░ą╗ą░ čāą│ąŠą╗ ąŠčéą║ą╗ąŠąĮąĄąĮąĖčÅ ąŠčé ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗ąĖ. ąöą░ą╗ąĄąĄ ą▒ąĖčéą╝ą░ą┐ ą┐ąŠą▓ąŠčĆą░čćąĖą▓ą░ąĄčéčüčÅ ąĮą░ čŹč鹊čé čāą│ąŠą╗ ąĖ 菹║čüą┐ąŠąĮąĖčĆčāąĄčéčüčÅ. ąóą░ą║ ą▓ąŠčé ... ąśąĘą╝ąĄčĆąĄąĮąĖąĄ čāą│ą╗ą░ čĆą░ą▒ąŠčéą░ąĄčé č鹊čćąĮąŠ (ą┐čĆąŠą▓ąĄčĆčÅą╗ ą┐ąŠ čéčĆą░ąĮčüą┐ąŠčĆčéąĖčĆčā) ą¤ąŠą▓ąŠčĆąŠčé ą▒ąĖčéą╝ą░ą┐ą░ ą▓čĆąŠą┤ąĄ č鹊ąČąĄ ąĮą░ ąĮčāąČąĮčŗą╣ čāą│ąŠą╗ ą┤ąĄą╗ą░ąĄčéčüčÅ. ąÉ 菹║čüą┐ąŠąĮąĖčĆčāąĄčé ą╝ą░ą╗ąĄąĮčīą║ąŠ ą╝ąĖą╝ąŠ, ąĮąĄ ą┐ąŠą╣ą╝čā ą┐ąŠč湥ą╝čā .
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Ruzik
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą░ą┐čĆ 01, 2018 09:44:50 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 55
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1632
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄąĮ 09, 2011 17:17:47
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 5713
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
SDimok
ąÉ ąĮą░ čüą║ąŠą╗čīą║ąŠ ą╝ąĖą╝ąŠ 菹║čüą┐ąŠąĮąĖčĆčāąĄčé?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
psychos
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą░ą┐čĆ 01, 2018 12:01:34 |
|
| ąÆčŗą╝ąŠą│ą░č鹥ą╗čī ą┐čĆąĖą┐ąŠčÅ |
|
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 171
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čüąĄąĮ 23, 2008 19:36:10
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 538
ą×čéą║čāą┤ą░: ą£ą░ą│ąĮąĖč鹊ą│ąŠčĆčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąĮą░čüą║ąŠą╗čīą║ąŠ čüą╗ąŠąČąĮąŠ ą╝ą░č鹥ą╝ą░čéąĖč湥čüą║ąĖ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ąĖčüą║čĆąĖą▓ą╗ąĄąĮąĖąĄ čĆąĖčüčāąĮą║ą░ ? 2 ąĮąŠčćąĖ ą│ąŠą╗ąŠą▓čā ą╗ąŠą╝ą░čÄ ą│ą┤ąĄ ą║čĆąĖą▓ąŠ ąĮą░ čüčéą░ąĮą║ąĄ ą¦ą¤ąŻ ąĖą╗ąĖ ą┐čĆąĖąĮč鹥čĆąĄ... ąöčāą╝ą░ą╗ čĆąĄą┐ą┐ąĄčĆčŗ ą║čĆąĖą▓ąŠ ą░ ąĮąĄčé, čĆąĖčüčāąĮąŠą║ ą▓ąŠ ą▓čüąĄą╣ ą┐ą╗ąŠčēą░ą┤ąĖ čüąĄą▒čÅ ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠ ą▓ąĄą┤čæčé. ą╝ąŠą│čā čüą║ąĖąĮčāčéčī čéą░ą▒ą╗ąĖčåčŗ ąĘą░ą╝ąĄčĆąŠą▓, ą┐čĆąŠą▒ą╗ąĄą╝ą░ čü ąŠą┤ąĮąŠą╣ č鹊čćą║ąŠą╣, ąŠąĮą░ ą┐ąŠčüč鹊čÅąĮąĮąŠ čāąĄąĘąČą░ąĄčé ą▓ ąŠą┤ąĮčā čüč鹊čĆąŠąĮčā ąÆąĄčĆčģ  ąØąĖąĘ ąĪąĄą╣čćą░čü ą┐ąŠą║ą░ ą┐ąĖčüą░ą╗ ą┐ąŠą┤čāą╝ą░ą╗, ąĮą░ą▓ąĄčĆąĮąŠ ąĮą░ą┐čĆą░ą▓ą╗čÅą╣ą║ąĖ ą║čĆąĖą▓čŗąĄ, čüč鹊ą╗ ą┐ąŠą▓ąŠčĆą░čćąĖą▓ą░ąĄčé... ąĄčüąĖą╗ ą▒čŗ čüą▓ąĄą╗ąŠą▓ą║ą░, č鹊ą│ą┤ą░ ą┤ąĖą░ą│ąŠąĮą░ą╗čīąĮąŠ ą║čĆąĖą▓ąŠ ą▒čŗą╗ąŠ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
|
ąĪčéčĆą░ąĮąĖčåą░ 298 ąĖąĘ 476
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 9506 ] |
... , , , , , , ... |
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ |
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: Teh, Viktor2009 ąĖ ą│ąŠčüčéąĖ: 28 |
|
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ
|

|
|