|
ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - ąĀą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą║ąŠčĆą░ą▒ą╗ąĖą║ čüą▓ąŠąĖą╝ąĖ čĆčāą║ą░ą╝ąĖ.
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
 
|
ąĪčéčĆą░ąĮąĖčåą░ 23 ąĖąĘ 108
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2145 ] |
... , , , , , , ... |
| ąÉą▓č鹊čĆ |
ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
roman.com

|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą║ąŠčĆą░ą▒ą╗ąĖą║ čüą▓ąŠąĖą╝ąĖ čĆčāą║ą░ą╝ąĖ.  ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą░ą▓ą│ 25, 2018 11:53:27 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 13, 2012 12:16:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6882
ą×čéą║čāą┤ą░: .ru
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąś čüąĮąŠą▓ą░ ąÜą×ąĀąÉąæąøąśąÜ ! ))  sashamelja ą┐ąĖčüą░ą╗(ą░): ąĮą░ čŹč鹊ą╣ ąĮąĄą┤ąĄą╗ąĄ č鹥ą╝čā ąĘą░ą║čĆąŠąĄą╝. sashamelja ą║čāą┤ą░č鹊 ą┐čĆąŠą┐ą░ą╗... ą¤ąŠčĆą░ ąĘą░ą║čĆčŗą▓ą░čéčī ą¦ą░čüčéčī 4. ąÆąĖą┤ąĄąŠąŠčéčćčæčé ą¦ą░čüčéčī 4:1.ąĪąŠą▒čĆą░ą╗ąĖ ą║ąŠčĆą░ą▒ą╗ąĖą║ - https://www.youtube.com/watch?v=8DyU3NnTP602.ąśčüą┐čŗčéą░ąĮąĖčÅ ą┤ąŠą╝ą░ - https://www.youtube.com/watch?v=cQme_y4TORw3.ąöąŠą▒ą░ą▓ąĖą╗ąĖ 菹║čĆą░ąĮ ąĖ čüą┤ąĄą╗ą░ą╗ąĖ ą╝ąĄąĮčÄ - https://www.youtube.com/watch?v=qWojRM-tjP04.ąØąĄą╝ąĮąŠą│ąŠ ąĖčüą┐čĆą░ą▓ąĖą╗ąĖ ą╝ąĄąĮčÄ ąĖ ą┐čĆąŠą▓ąĄą╗ąĖ ąĖčüą┐čŗčéą░ąĮąĖčÅ ąĮą░ ą▓ąŠą┤ąĄ... ążąĖąĮą░ą╗čīąĮąŠąĄ ą▓ąĖą┤ąĄąŠ - https://www.youtube.com/watch?v=VvzbTWOdV3gąÜčĆą░čéą║ąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ. ą¤čĆąŠč鹊ą║ąŠą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣: PCM-256. ( http://www.rcdesign.ru/articles/radio/p ... ztoc8736_3). ąÆą╗ąŠąČąĄąĮąĖąĄ:
 PCM-256.jpg [150.59 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 457
PCM-256.jpg [150.59 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 457
ąĪčģąĄą╝ą░, ą┐ąĄčćą░čéą║ą░, ą┐čĆąŠčłąĖą▓ą║ą░, ąĖčüčģąŠą┤ąĮąĖą║ąĖ ą┐čĆąĖą╗ą░ą│ą░čÄčéčüčÅ: ąÆą╗ąŠąČąĄąĮąĖąĄ: *ąöą░ąĮąĮčŗą╣ ą┐čĆąŠą┤čāą║čé čĆą░čüą┐čĆąŠčüčéčĆą░ąĮčÅąĄčéčüčÅ ąĮą░ čāčüą╗ąŠą▓ąĖčÅčģ "čüą▓ąŠą▒ąŠą┤ąĮąŠą╣ ą╗ąĖčåąĄąĮąĘąĖąĖ" - ( https://ru.wikipedia.org/wiki/ąĪą▓ąŠą▒ąŠą┤ąĮą░čÅ_ą╗ąĖčåąĄąĮąĘąĖčÅ). )) P.S. ąŁą║čĆą░ąĮčćąĖą║ OLED 128x64 (ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ SH1106) ą╝ąŠąČąĮąŠ ąĘą░ą╝ąĄąĮąĖčéčī ąĮą░ ą▒ąŠą╗ąĄąĄ ą┐čĆąŠčüč鹊ą╣ Nokia 5110. ąÆą░čĆąĖą░ąĮčé ąŠčé MASIK: ąÆą╗ąŠąČąĄąĮąĖąĄ:
Nokia 5110.JPG [128.35 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 568
ąĪčģąĄą╝ą░, ą┐ąĄčćą░čéą║ą░, ą┐čĆąŠčłąĖą▓ą║ą░, ąĖčüčģąŠą┤ąĮąĖą║ąĖ čüą╝ąŠčéčĆąĖ ą▓čŗčłąĄ. ą¦ą░čüčéčī 4. The End.----------
ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ čĆą░ąĘ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī roman.com ąĪą▒ ą░ą▓ą│ 25, 2018 22:08:14, ą▓čüąĄą│ąŠ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī 2 čĆą░ąĘ(ą░).
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
 |
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
roman.com
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą║ąŠčĆą░ą▒ą╗ąĖą║ čüą▓ąŠąĖą╝ąĖ čĆčāą║ą░ą╝ąĖ. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą░ą▓ą│ 25, 2018 23:21:54 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 13, 2012 12:16:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6882
ą×čéą║čāą┤ą░: .ru
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąĢčēčæ ą┐ą░čĆčā čüą╗ąŠą▓ ąŠ čüą░ą╝ąŠą┤ąĄą╗čīąĮąŠą╝ čĆą░ą┤ąĖąŠą╝ąŠą┤čāą╗ąĄ čüąŠą▒čĆą░ąĮąŠą│ąŠ ąĖąĘ ąŠą▒čŗčćąĮąŠą╣ čĆą░čåąĖąĖ ą¦ą░čüčéčī 1. (ąĮą░ ą┐ąĄčĆą▓ąŠą╣ čüčéčĆą░ąĮąĖčåąĄ čŹč鹊ą│ąŠ č乊čĆčāą╝ą░). ąÆą╗ąŠąČąĄąĮąĖąĄ: ąÆ čüą░ą╝ąŠą┤ąĄą╗čīąĮąŠą╝ čĆą░ą┤ąĖąŠą╝ąŠą┤čāą╗ąĄ ą╝čŗ čéą░ą║ ąČąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ PCM-256, č鹊ą╗čīą║ąŠ ą▓ ąŠčéą╗ąĖčćąĖąĖ ąŠčé ąĘą░ą▓ąŠą┤čüą║ąŠą│ąŠ čĆą░ą┤ąĖąŠą╝ąŠą┤čāą╗čÅ (nRF24L01+), ą▓ čüą░ą╝ąŠą┤ąĄą╗čīąĮąŠą╝ čĆą░ą┤ąĖąŠą╝ąŠą┤čāą╗ąĄ ą╝čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖ ą£ą░ąĮč湥čüč鹥čĆčüą║ąŠąĄ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ( https://ru.wikipedia.org/wiki/ążąĖąĘąĖč湥čüą║ąŠ ... ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ). ąØą░ ą▓čŗčģąŠą┤ąĄ ą┐čĆąĖčæą╝ąĮąĖą║ą░ čüč鹊ąĖčé čāčüąĖą╗ąĖč鹥ą╗čī-ąŠą│čĆą░ąĮąĖčćąĖč鹥ą╗čī. ąØą░ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░ą╝ą╝ąĄ ą▓ąĖą┤ąĮąŠ, čćč鹊 ą┐čĆąĖ ąĮąĄą▒ąŠą╗čīčłąŠą╝ čĆą░čüčüč鹊čÅąĮąĖąĖ ąŠčé ą┐čāą╗čīčéą░ čüąĖą│ąĮą░ą╗ ąĮą░ ą▓čŗčģąŠą┤ąĄ čāčüąĖą╗ąĖč鹥ą╗čÅ-ąŠą│čĆą░ąĮąĖčćąĖč鹥ą╗čÅ čćčæčéą║ąĖą╣, ą┐čĆą░ą║čéąĖč湥čüą║ąĖ ą▒ąĄąĘ čłčāą╝ąŠą▓: ąÆą╗ąŠąČąĄąĮąĖąĄ: ą¤čĆąĖ ą▒ąŠą╗čīčłąŠą╝ čĆą░čüčüč鹊čÅąĮąĖąĖ ąŠčé ą┐čāą╗čīčéą░, čüąĖą│ąĮą░ą╗ ąĮą░ ą▓čŗčģąŠą┤ąĄ čāčüąĖą╗ąĖč鹥ą╗čÅ-ąŠą│čĆą░ąĮąĖčćąĖč鹥ą╗čÅ ąĖą┤čæčé čü čłčāą╝ą░ą╝ąĖ. ą×ą┤ąĮą░ą║ąŠ ąĖ ą┐čĆąĖ čéą░ą║ąŠą╝ čüąĖą│ąĮą░ą╗ąĄ ąĮą░čł ą║ąŠčĆą░ą▒ą╗ąĖą║ čĆą░ą▒ąŠčéą░ąĄčé ąĖčüą┐čĆą░ą▓ąĮąŠ.)) ąŻ ąĮą░čü ą▓ ą┐čĆąĖčæą╝ąĮąĖą║ąĄ čåąĖčäčĆąŠą▓ą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ čüąĖą│ąĮą░ą╗ą░: ąÆą╗ąŠąČąĄąĮąĖąĄ:
ą×ą▒čĆą░ą▒ąŠčéą║ą░ čüąĖą│ąĮą░ą╗ą░.jpg [230.18 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 518
ą¤ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ čüąĖą│ąĮą░ą╗ą░ ą£ąÜ ą▓ąŠčüčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĖąĘ ąĘą░čłčāą╝ą╗čæąĮąĮčŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓ ąĮą░čł "ą╝ą░ąĮč湥čüč鹥čĆ" (ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╣ čåąĖčäčĆąŠą▓ąŠą╣ čäąĖą╗čīčéčĆ). ąÜąŠąĮąĄčćąĮąŠ, ą┐ąŠ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╝čā ąĮą░ą┤ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąÉą”ą¤ ąĖ ąŠčåąĖčäčĆąŠą▓čŗą▓ą░čéčī ą║ą░ą║ ą┐ąŠą╗ąŠąČąĄąĮąŠ)). ąÆą╗ąŠąČąĄąĮąĖąĄ: ąóąŠą│ą┤ą░ ąĖąĘ čüčģąĄą╝čŗ ą╝ąŠąČąĮąŠ čāą▒čĆą░čéčī čāčüąĖą╗ąĖč鹥ą╗čī-ąŠą│čĆą░ąĮąĖčćąĖč鹥ą╗čī, ą░ čüąĖą│ąĮą░ą╗ čüąĮąĖą╝ą░čéčī čü ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠą│ąŠ čāčüąĖą╗ąĖč鹥ą╗čÅ (ąĖą╗ąĖ ą┐čĆčÅą╝ąŠ čü ą┤ąĄč鹥ą║č鹊čĆą░ ą┐čĆąĖčæą╝ąĮąĖą║ą░) ąĖ ą┐ąŠą┤ą░ą▓ą░čéčī čüčĆą░ąĘčā ąĮą░ ąÉą”ą¤ ą▓ ą£ąÜ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ čüčģąĄą╝ą░ ą▒čāą┤ąĄčé čéą░ą║ą░čÅ: ąÆą╗ąŠąČąĄąĮąĖąĄ: ąś ąĄčēčæ. ąĪ č鹊čćą║ąĖ ąĘčĆąĄąĮąĖčÅ čĆą░ą┤ąĖąŠą║ą░ąĮą░ą╗ą░, ą░ ą╝čŗ čüąĄą╣čćą░čü ą│ąŠą▓ąŠčĆąĖą╝ ąŠą▒ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą┤ą╗čÅ čĆą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą║ąŠčĆą░ą▒ą╗ąĖą║ąŠą╝ ąŠą▒čŗčćąĮąŠą╣, čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ čĆą░čåąĖąĖ (čüą░ą╝ąŠą┤ąĄą╗čīąĮąŠą╣ ąĖą╗ąĖ ąĘą░ą▓ąŠą┤čüą║ąŠą╣, ąĘąĮą░č湥ąĮąĖąĄ ąĮąĄ ąĖą╝ąĄąĄčé), ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą│ąŠą╗ąŠčüą░, ąĮą░ą▓ąĄčĆąĮąŠąĄ ą┐čĆąĄą┤ą┐ąŠčćčéąĖč鹥ą╗čīąĮąĄą╣ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĮąĄ ą╝ą░ąĮč湥čüč鹥čĆą║ąŠąĄ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ, ą░ čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ą┐ąŠą┤ąĮąĄčüčāčēąĖąĄ čćą░čüč鹊čéčŗ. ąØą░ą┐čĆąĖą╝ąĄčĆ ą¤ąÉąÜąĢąóąØą½ąĢ ąĀąÉąöąśą×ą£ą×ąöąĢą£ą½, ą│ą┤ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą▓ąĄ ą┐ąŠą┤ąĮąĄčüčāčēąĖąĄ čćą░čüč鹊čéčŗ - "0" čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čćą░čüč鹊čéą░ 1200 ąōčå, ą░ "1" - 2200 ąōčå. http://programming-lang.com/html/hard/modem1/10.htmą¤čĆąĖ čŹč鹊ą╝ č鹥ąŠčĆąĄčéąĖč湥čüą║ąĖ ą┐ąŠą╗čāčćą░ąĄą╝ ą▒ąŠą╗ąĄąĄ čĆą░ą▓ąĮąŠą╝ąĄčĆąĮčŗą╣ čüą┐ąĄą║čéčĆ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░. ą¤čĆą░ą▓ą┤ą░, ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą┐ąŠą┤ąĮąĄčüčāčēąĄą╣ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą╝ąĄąĮčīčłąĄ (ą▓ čüčĆąĄą┤ąĮąĄą╝ ą▓ 1,5 čĆą░ąĘą░) ą┐ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü ą╝ą░ąĮč湥čüč鹥čĆčüą║ąĖą╝ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄą╝. ąØąŠ čü ą┤čĆčāą│ąŠą╣ čüč鹊čĆąŠąĮčŗ, ą╝čŗ ą▓ąĄą┤čī ą╝ąŠąČąĄą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĮąĄ ą┤ą▓ąĄ, ą░ ą▒ąŠą╗ąĄąĄ ą┐ąŠą┤ąĮąĄčüčāčēąĖčģ (ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ąĮąĄ ą┐ąŠ ąŠą┤ąĮąŠą╝čā ą▒ąĖčéčā, ą░ čüčĆą░ąĘčā ą┐ąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▒ąĖčé) ąĖ č鹥ą╝ čüą░ą╝čŗą╝ ą┐ąŠą▓čŗčüąĖčéčī čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ. ąó.ąĄ. ą┐ąŠą▓čŗčüąĖčéčī ą┐ą╗ąŠčéąĮąŠčüčéčī ąĖąĮč乊čĆą╝ą░čåąĖąĖ (ą▒ąĖčé/ą│ąĄčĆčå). ą¤čĆą░ą▓ą┤ą░ ą┐čĆąĖ čŹč鹊ą╝ čüąĮąĖąČą░ąĄčéčüčÅ ą┤ą░ą╗čīąĮąŠčüčéčī čüą▓čÅąĘąĖ, čé.ą║. čü čāą▓ąĄą╗ąĖč湥ąĮąĖąĄą╝ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┐ąŠą┤ąĮąĄčüčāčēąĖčģ čéčĆąĄą▒čāąĄčéčüčÅ ą▒ąŠą╗ąĄąĄ ą╝ąŠčēąĮčŗą╣ čüąĖą│ąĮą░ą╗ (ą▒ąŠą╗čīčłąĄ ąŠčéąĮąŠčłąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗/čłčāą╝ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą┐čĆąĖčæą╝ąĮąĖą║ą░), ąĖąĮą░č湥 ą£ąÜ ąĮąĄ čüą╝ąŠąČąĄčé ąĖčģ čĆą░ąĘą╗ąĖčćąĖčéčī ą▓ čłčāą╝ą░čģ)). ąÉ ą╝ąŠąČąĄą╝ ą┐čĆąĖą╝ąĄąĮąĖčéčī ąĖ ą┤čĆčāą│ąĖąĄ ą▓ąĖą┤čŗ ą╝ąŠą┤čāą╗čÅčåąĖą╣... ąĮą░ą┐čĆąĖą╝ąĄčĆ čäą░ąĘąŠą▓čāčÄ... ąĖą╗ąĖ ą╝ąĮąŠą│ąŠčāčĆąŠą▓ąĮąĄą▓čāčÄ... ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąĖčģ ą┐ąŠčĆčÅą┤ą║ąŠą▓)) ąØą░ą┐čĆąĖą╝ąĄčĆ čüąĄą╣čćą░čü čā ąĮą░čü FSK-2, ą╝ąŠąČąĄą╝ čüą┤ąĄą╗ą░čéčī FSK-4 (ą║ą░ą║ ą▓ ąĮąĄą║ąŠč鹊čĆčŗčģ ąĘą░ą▓ąŠą┤čüą║ąĖčģ čĆą░ą┤ąĖąŠą╝ąŠą┤čāą╗čÅčģ). ąś čé.ą┤. ąĖ .čé.ą┐.)) ą¤ąÉąÜąĢąóąØą½ąĢ ąĀąÉąöąśą×ą£ą×ąöąĢą£ą½ ą┤ą╗čÅ čĆą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ - č鹥ą╝ą░ ąĖąĮč鹥čĆąĄčüąĮą░čÅ, ąĘą░ą╣ą╝čæą╝čüčÅ čŹčéąĖą╝ ą┐ąŠąĘąČąĄ)) ąÉ čüąĄą╣čćą░čü ą┐ąĄčĆąĄčģąŠą┤ąĖą╝ ą║ ą¦ą░čüčéčī 5. )) ---------- ą¦ą░čüčéčī 5. ąÆ čŹč鹊ą╣ čćą░čüčéąĖ ą╝čŗ ą▒čāą┤ąĄą╝ čāą┐čĆą░ą▓ą╗čÅčéčī ą║ąŠčĆą░ą▒ą╗ąĖą║ąŠą╝ ą┐ąŠ ąĖąĮč鹥čĆąĮąĄčéčā! ąĪ ą┐ąŠą╝ąŠčēčīčÄ ąĮąŠčāčéą▒čāą║ą░/č鹥ą╗ąĄč乊ąĮą░ (čü Wi-Fi)... ąĖ čé.ą┤. ąöą╗čÅ čŹč鹊ą│ąŠ ąĮą░ą╝ ąĮčāąČąĮąŠ ąĮą░ą╣čéąĖ/čüą┤ąĄą╗ą░čéčī/ą┐čĆąĖą┤čāą╝ą░čéčī Wi-Fi ąĖ Ethernet. )) ąÆ ąĖąĮąĄč鹥 ąĄčüčéčī ą╗čÄą▒ąŠą┐čŗčéąĮčŗąĄ ą┐čĆąŠąĄą║čéčŗ... ąØą░ą┐čĆąĖą╝ąĄčĆ ą▓ąŠčé: http://cxem.net/uprav/uprav34.php ąØą░ą┤ąŠ čüą┤ąĄą╗ą░čéčī ąĮąĄčćč鹊 ą┐ąŠą┤ąŠą▒ąĮąŠąĄ)) Wi-Fi čĆąŠčāč鹥čĆ ąĮąĄ ą┤ąŠ ą║ąŠąĮčåą░ ą┤ąŠą╗ąŠą╝ą░ąĮąĮčŗą╣ ąĄčüčéčī. ąōą╗ą░ą▓ąĮą░čÅ ą┐čĆąŠą▒ą╗ąĄą╝ą░ - ą║ą░ą║ ąĮą░ą╝ ą▓ čüčģąĄą╝čā ą║ąŠčĆą░ą▒ą╗ąĖą║ą░ ą┤ąŠą▒ą░ą▓ąĖčéčī Ethernet? ąĢčüčéčī ąĖą┤ąĄąĖ? ))
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Ser60
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą║ąŠčĆą░ą▒ą╗ąĖą║ čüą▓ąŠąĖą╝ąĖ čĆčāą║ą░ą╝ąĖ. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą░ą▓ą│ 26, 2018 17:35:08 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 74
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 607
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą┤ąĄą║ 24, 2008 09:58:58
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3715
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 3
")
")
")
|
ą”ąĖčéą░čéą░: ą¦ą░čüčéčī 5. ąÆ čŹč鹊ą╣ čćą░čüčéąĖ ą╝čŗ ą▒čāą┤ąĄą╝ čāą┐čĆą░ą▓ą╗čÅčéčī ą║ąŠčĆą░ą▒ą╗ąĖą║ąŠą╝ ą┐ąŠ ąĖąĮč鹥čĆąĮąĄčéčā! ąĪ ą┐ąŠą╝ąŠčēčīčÄ ąĮąŠčāčéą▒čāą║ą░/č鹥ą╗ąĄč乊ąĮą░ (čü Wi-Fi)... ąĖ čé.ą┤. ąöą╗čÅ čŹč鹊ą│ąŠ ąĮą░ą╝ ąĮčāąČąĮąŠ ąĮą░ą╣čéąĖ/čüą┤ąĄą╗ą░čéčī/ą┐čĆąĖą┤čāą╝ą░čéčī Wi-Fi ąĖ Ethernet. )) ąÆ ąĖąĮąĄč鹥 ąĄčüčéčī ą╗čÄą▒ąŠą┐čŗčéąĮčŗąĄ ą┐čĆąŠąĄą║čéčŗ... ąØą░ą┐čĆąĖą╝ąĄčĆ ą▓ąŠčé: http://cxem.net/uprav/uprav34.php ąØą░ą┤ąŠ čüą┤ąĄą╗ą░čéčī ąĮąĄčćč鹊 ą┐ąŠą┤ąŠą▒ąĮąŠąĄ)) Wi-Fi čĆąŠčāč鹥čĆ ąĮąĄ ą┤ąŠ ą║ąŠąĮčåą░ ą┤ąŠą╗ąŠą╝ą░ąĮąĮčŗą╣ ąĄčüčéčī. ąōą╗ą░ą▓ąĮą░čÅ ą┐čĆąŠą▒ą╗ąĄą╝ą░ - ą║ą░ą║ ąĮą░ą╝ ą▓ čüčģąĄą╝čā ą║ąŠčĆą░ą▒ą╗ąĖą║ą░ ą┤ąŠą▒ą░ą▓ąĖčéčī Ethernet? ąĢčüčéčī ąĖą┤ąĄąĖ? )) ą» čĆąĄą║ąŠą╝ąĄąĮą┤čāčÄ ąĮą░čćą░čéčī čü ą▒ąŠą╗ąĄąĄ čćčæčéą║ąŠą│ąŠ ąŠą┐ąĖčüą░ąĮąĖčÅ čåąĄą╗ąĄą╣ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĮąŠą▓ąŠą╣ ą▓ąĄčĆčüąĖąĖ. ąÆ čćą░čüčéąĮąŠčüčéąĖ, ąĄčüą╗ąĖ ąŠąĮą░ ą▒čāą┤ąĄčé čāą╗čāčłąĄąĮąĖąĄą╝ ą┐čĆąĄą┤čŗą┤čāčēąĖčģ, č鹊 ą▓ ą║ą░ą║ąŠą╝ ą┐ą╗ą░ąĮąĄ? ą¤ąŠą║ą░ ą▓ąŠąĘąĮąĖą║ą░ąĄčé ą╝ą░čüčüą░ ą▓ąŠą┐čĆąŠčüąŠą▓, ąĮą░ ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą▓ąĄą┤čæąĮąĮčŗą╣ ą▓čŗčłąĄ ą┐ą░čĆą░ą│čĆą░čä ąŠą┐ąĖčüą░ąĮąĖčÅ ąĮąĄ ą┤ą░čæčé ąŠą┤ąĮąŠąĘąĮą░čćąĮąŠą│ąŠ ąŠčéą▓ąĄčéą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐ąŠč湥ą╝čā WiFi? ąźąŠčéąĖč鹥 ą║ą░ą╝ąĄčĆčā ą┐čĆąĖą║čĆčāčéąĖčéčī ą║ ą║ąŠčĆą░ą▒ą╗čÄ (ąĘą░č湥ą╝ ąŠąĮą░ ąĄą╝čā?) ąĖą╗ąĖ ą┐čĆąĖą▓ąĄą┤čæąĮąĮčŗą╣ ą┐čĆąĖą╝ąĄčĆ ą┐čĆąŠąĄą║čéą░ ą▒čŗą╗ ą┐čĆąŠčüč鹊 ą┐čĆąĖą╝ąĄčĆ? ąś ąĄčüą╗ąĖ WiFi, č鹊 ą┐čĆąĖčćčæą╝ ąĘą┤ąĄčüčī Ethernet? ąźąŠčéąĖč鹥 ą║ąŠčĆą░ą▒ą╗čæą╝ ą┐ąŠ ą┐čĆąŠą▓ąŠą┤ą░ą╝ čāą┐čĆą░ą▓ą╗čÅčéčī ąĖą╗ąĖ ą┐čĆąĖą║čĆčāčéąĖčéčī Ethernet-ą║ą░ą╝ąĄčĆčā ą║ WiFi čĆąŠčāč鹥čĆčā ą║ą░ą║ ą▓ č鹊ą╝ ą┐čĆąŠąĄą║č鹥 ą┐ąŠ čüčüčŗą╗ą║ąĄ? ąĢčüą╗ąĖ ą║ą░ą╝ąĄčĆčā, ą▓ čüąĄčéąĖ ąĄčüčéčī ą┐čĆąŠąĄą║čéčŗ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ą░ą╝ąĄčĆ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ą║ ą£ąÜ. ąŚą░č湥ą╝ ą▓ąŠąŠą▒čēąĄ čüčéą░ą▓ąĖčéčī ą│čĆąŠą╝ąŠąĘą┤ą║ąĖą╣ čĆąŠčāč鹥čĆ ąĮą░ ą╝ąŠą┤ąĄą╗čī, ą║ąŠą│ą┤ą░ ąĖą╝ąĄčÄčéčüčÅ ą║ąŠą╝ą┐ą░ą║čéąĮčŗąĄ WiFi ą╝ąŠą┤čāą╗ąĖ, ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┤ą░ąČąĄ čüąĮą░ą▒ąČčæąĮąĮčŗąĄ ą║ąŠąĮąĮąĄą║č鹊čĆąŠą╝ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▒ąŠą╗ąĄąĄ čŹčäč乥ą║čéąĖą▓ąĮąŠą╣ ą▓ąĮąĄčłąĮąĄą╣ ą░ąĮč鹥ąĮąĮčŗ? ąØąĄčāąČąĄą╗ąĖ č鹊ą╗čīą║ąŠ ą┐ąŠč鹊ą╝čā, čćč鹊 čāąČąĄ ąĄčüčéčī ą▓ ąĮą░ą╗ąĖčćąĖąĖ ąĮąĄą┤ąŠą╗ąŠą╝ą░ąĮąĮčŗą╣ čüčéą░čĆčŗą╣ čĆąŠčāč鹥čĆ?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
roman.com
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą║ąŠčĆą░ą▒ą╗ąĖą║ čüą▓ąŠąĖą╝ąĖ čĆčāą║ą░ą╝ąĖ. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą░ą▓ą│ 27, 2018 14:52:46 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 13, 2012 12:16:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6882
ą×čéą║čāą┤ą░: .ru
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąØąĄčé čćčæčéą║ąŠą│ąŠ ąŠą┐ąĖčüą░ąĮąĖčÅ čåąĄą╗ąĄą╣ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĮąŠą▓ąŠą╣ ą▓ąĄčĆčüąĖąĖ. ą» ą┐čĆąŠčüč鹊 čģąŠčćčā čćč鹊ą▒čŗ ąÜą×ąĀąÉąæąøąśąÜ ą╝ąŠą│ ą▓čŗčģąŠą┤ąĖčéčī ą▓ ąĖąĮč鹥čĆąĮąĄčé... ą┤ą╗čÅ ąĮą░čćą░ą╗ą░ ą▓ ąĖąĘąĄčĆąĮąĄčé)) ąÜą░ą║ čÅ čāąČąĄ ą┐ąĖčüą░ą╗ ą▓čŗčłąĄ "ą┐čĆąŠąĄą║čé ąÜą×ąĀąÉąæąøąśąÜ čüąŠąĘą┤ą░ąĮ čü čåąĄą╗čīčÄ ąĖąĘčāč湥ąĮąĖčÅ čüąŠą▓čĆąĄą╝ąĄąĮąĮčŗčģ č鹥čģąĮąŠą╗ąŠą│ąĖą╣". )) ąÉ WiFi ą▓ ą║ąŠčĆą░ą▒ą╗ąĖą║ąĄ ą┐ąŠą║ą░ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čÄ ą┐čĆąŠčüč鹊 ą║ą░ą║ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąŠą┐čåąĖčÄ. ąØą░ą┐čĆąĖą╝ąĄčĆ ą║ą░ą║ ąĘą░ą┐ą░čüąĮąŠą╣ ą║ą░ąĮą░ą╗ čüą▓čÅąĘąĖ ąĖą╗ąĖ ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ čåąĄą╗ąĄą╣... ąĖą╗ąĖ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čĆą░ąĘąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓... ą║ą░ą╝ąĄčĆčŗ.. čŹčģąŠą╗ąŠčéčŗ... GPS ąĮą░ą▓ąĖą│ą░č鹊čĆčŗ... ąĖ čé.ą┤. Ser60 ą┐ąĖčüą░ą╗(ą░): ąŚą░č湥ą╝ ą▓ąŠąŠą▒čēąĄ čüčéą░ą▓ąĖčéčī ą│čĆąŠą╝ąŠąĘą┤ą║ąĖą╣ čĆąŠčāč鹥čĆ ąĮą░ ą╝ąŠą┤ąĄą╗čī ąØčā ą┐čĆąŠčüč鹊.. ą┐ąŠč鹊ą╝čā čćč鹊 ą╝ąĮąĄ ąĄą│ąŠ ą┤ąĄą▓ą░čéčī ąĮąĄą║čāą┤ą░)) ąÉ čŹč鹊 http://cxem.net/uprav/uprav34.php ą┐čĆąŠčüč鹊 ą║ą░ą║ ą┐čĆąĖą╝ąĄčĆ, ą║čāą┤ą░ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüčéą░čĆčŗą╣ čĆąŠčāč鹥čĆ... ąØąĄ ą▓čŗą▒čĆą░čüčŗą▓ą░čéčī ąČąĄ ąĄą│ąŠ)) WiFi ą╝ąŠą┤čāą╗ąĖ ESP8266 čāąČąĄ čģąŠč鹥ą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī (čüą╝. ą▓čŗčłąĄ). ą¤ąŠč鹊ą╝ ąĖą╝ąĖ ąĘą░ą╣ą╝čæą╝čüčÅ. ąæčŗą╗ ąĄčēčæ ą▓ ą┐ą╗ą░ąĮą░čģ GPS - ąĮą░ą▓ąĖą│ą░č鹊čĆ... ąĖ ą┤ą░ąČąĄ SIM 800 (SIM 900) ą┤ą╗čÅ GSM čüą▓čÅąĘąĖ... http://codius.ru/articles/GSM_ą╝ąŠą┤čāą╗čī_SIM800L_čćą░čüčéčī_1 ąØąŠ ą┤ą╗čÅ ąĮą░čćą░ą╗ą░ čģąŠčćčā ąĖąĘąĄčĆąĮąĄčé ą▓ ąÜą×ąĀąÉąæąøąśąÜ ! )) ąĪąĄą╣čćą░čü ąĮą░čł ą║ąŠčĆą░ą▒ą╗ąĖą║ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā č鹊ą╗čīą║ąŠ ą┐ąŠ UART. ąŻ ą╝ąĄąĮčÅ ąĄčüčéčī čéą░ą║ąŠą╣ ą║ą░ą▒ąĄą╗čī (ą┐ąĄčĆąĄčģąŠą┤ąĮąĖą║ USB-UART). ąÆą╗ąŠąČąĄąĮąĖąĄ: čéą░ą╝ ą▓ąĮčāčéčĆąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ą║ą░... ąÆą╗ąŠąČąĄąĮąĖąĄ:
ą▓ąĮčāčéčĆąĖ.jpg [189.94 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 572
ąĖą╗ąĖ ąĄčüčéčī ą┤čĆčāą│ąĖąĄ ą┐ąĄčĆąĄčģąŠą┤ąĮąĖą║ąĖ USB-UART... ąÆą╗ąŠąČąĄąĮąĖąĄ: čÅ čāąČąĄ ą┐ąŠą┤ą║ą╗čÄčćą░ą╗ ą║ ą║ąŠą╝ą┐čā... ą┐ąŠ čéą░ą║ąŠą╣ čüčģąĄą╝ąĄ ąÆą╗ąŠąČąĄąĮąĖąĄ:
UART.jpg [193.78 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 591
ą╝ąŠąČąĮąŠ ą▓čŗą▓ąŠą┤ąĖčéčī ą▓čüąĄ ą┤ą░ąĮąĮčŗąĄ ą║ąŠčĆą░ą▒ą╗ąĖą║ą░ ąĮą░ ą║ąŠą╝ą┐čīčÄč鹥čĆ (ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą╝ąŠąĮąĖč鹊čĆ). ąś č湥čĆąĄąĘ čŹčéčā ąČąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čā ą╝ąŠąČąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī ąĮą░čłąĖą╝ ą║ąŠčĆą░ą▒ą╗ąĖą║ąŠą╝. ą¤čĆą░ą▓ą┤ą░ ąĮąĄ ąŠč湥ąĮčī čāą┤ąŠą▒ąĮąŠ)) ąØą░ą┤ąŠ ą┐ąĖčüą░čéčī ąĘąĮą░č湥ąĮąĖčÅ ą▓ č鹥čĆą╝ąĖąĮą░ą╗ąĄ - ąĮą░ą┐čĆąĖą╝ąĄčĆ "ą╗ąĄą▓ąŠ 20" ... "ą▓ą┐ąĄčĆčæą┤ 30" ... )) ą£ąŠąČąĮąŠ čüčćąĖčéčŗą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ ąĖ/ąĖą╗ąĖ čāą┐čĆą░ą▓ą╗čÅčéčī ąĮą░čłąĖą╝ ą║ąŠčĆą░ą▒ą╗ąĖą║ąŠą╝ ą┐čĆčÅą╝ąŠ čü ąĮąŠčāčéą▒čāą║ą░ (ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą╝ąŠąĮąĖč鹊čĆ). ą¤ąĖčéą░ąĮąĖąĄ čüčģąĄą╝čŗ ą┐čĆčÅą╝ąŠ čü USB (+5V). ąÆą╗ąŠąČąĄąĮąĖąĄ:
ąĮąŠčāčéą▒čāą║.jpg [120.76 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 474
ąóąŠą╗čīą║ąŠ ą┐ąŠą▓č鹊čĆčÅčÄ - čŹč鹊 ąĮąĄčāą┤ąŠą▒ąĮąŠ! )) ąś ą│ą╗ą░ą▓ąĮąŠąĄ - čŹč鹊 ąĮąĄ ąĖąĮč鹥čĆąĄčüąĮąŠ...  ąźąŠčćčā ąĖąĘąĄčĆąĮąĄčé ą▓ ąÜą×ąĀąÉąæąøąśąÜ! ))  P.S. P.S. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ą┐čĆąŠąĄą║čé "ą║ąŠčĆą░ą▒ą╗ąĖą║" čŹč鹊 ą┐ą╗ą░čéč乊čĆą╝ą░ ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ ą┐čĆąŠąĄą║č鹊ą▓, ąĮą░ą┐čĆąĖą╝ąĄčĆ "ąŻą╝ąĮčŗą╣ ąöąŠą╝". ąæąĄčĆčæą╝ ą║ąŠčĆą░ą▒ą╗ąĖą║ ąĖ ą▒čŗčüčéčĆąŠ ą┐ąĄčĆąĄą┤ąĄą╗čŗą▓ą░ąĄą╝ ą▓ čāą╝ąĮčŗą╣ ą┤ąŠą╝)) - ą▓ą╝ąĄčüč鹊 čäą░čĆ - ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝ ąŠčüą▓ąĄčēąĄąĮąĖąĄ ą┤ąŠą╝ą░. - ą▓ą╝ąĄčüč鹊 čüąĄčĆą▓ąŠ - čüčéą░ą▓ąĖą╝ čłą░čĆąŠą▓čŗą╣ ą║čĆą░ąĮ ąÆą╗ąŠąČąĄąĮąĖąĄ:
čłą░čĆąŠą▓čŗą╣ ą║čĆą░ąĮ.jpg [54.73 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 262
- ą┤ą░čéčćąĖą║ ą┐čĆąŠč鹥čćą║ąĖ ąŠčüčéą░ą▓ą╗čÅąĄą╝ ą║ą░ą║ ąĄčüčéčī. - ą┤ą░čéčćąĖą║ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝ ąĮą░ą┐čĆąĖą╝ąĄčĆ ą║ ą▒ąŠą╣ą╗ąĄčĆčā ąĖ ą║ ą┤čĆčāą│ąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝. - ą▓čüčæ čŹč鹊 ą▓čŗą▓ąŠą┤ąĖą╝ (ą┐ąŠ ą┐čĆąŠą▓ąŠą┤ą░ą╝ ąĖą╗ąĖ ą┐ąŠ čĆą░ą┤ąĖąŠą║ą░ąĮą░ą╗čā) ąĮą░ ą│ą╗ą░ą▓ąĮą╣ ą┐čāą╗čīčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čü 菹║čĆą░ąĮčćąĖą║ąŠą╝ (ąŠą┤ąĮąĖą╝ ąĖą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ). - ą┤ąŠą▒ą░ą▓ą╗čÅąĄą╝ čćą░čüčŗ (ą┤ą╗čÅ ą▓čüčÅą║ąĖčģ čéą░ą╣ą╝ąĄčĆąŠą▓). - ą▒čŗčüčéčĆąĄąĮčīą║ąŠ ą┐ąĄčĆąĄą┐ąĖčüčŗą▓ą░ąĄą╝ ą┐čĆąŠą│čĆą░ą╝ą╝čā... ą▒čŗą╗ąŠ "ą╝ąĄąĮčÄ ą║ąŠčĆą░ą▒ą╗ąĖą║" >> čüčéą░ą╗ąŠ "ą╝ąĄąĮčÄ čāą╝ąĮčŗą╣ ą┤ąŠą╝". )) ... ąÆą┐čĆąĖąĮčåąĖą┐ąĄ ą▓čüčæ ąĄčüčéčī. ąÆą╗ąŠąČąĄąĮąĖąĄ:
čāą╝ąĮčŗą╣ ą┤ąŠą╝.jpg [106.55 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 528
ąóąŠą╗čīą║ąŠ ąĮąĄčé ą▓čŗčģąŠą┤ą░ ą▓ ąĖąĮč鹥čĆąĮąĄčé. ąÆąŠčé ą┐ąŠč湥ą╝čā ąĮą░ą╝ čéą░ą║ ąČąĖąĘąĮąĄąĮąĮąŠ ą▓ą░ąČąĄąĮ ąĖąĘąĄčĆąĮąĄčé ą▓ ą║ąŠčĆą░ą▒ą╗ąĖą║ąĄ)) ąóą░ą║ ą┐ąŠąĮčÅčéąĮąĄą╣?)) ąØčā ąĖ ą┐čĆąŠčüč鹊 ą┤ą╗čÅ čüą┐ąŠčĆčéąĖą▓ąĮąŠą│ąŠ ąĖąĮč鹥čĆąĄčüą░ (čÅ ąĄčēčæ ąĮąĄ ą▓ąĮąĖą║ą░ą╗ ą▓ąŠ ą▓čüąĄ č鹊ąĮą║ąŠčüčéąĖ čĆą░ą▒ąŠčéčŗ ąĖąĮč鹥čĆąĮąĄčéą░). ąØą░ą┤ąŠ ąČąĄ čü č湥ą│ąŠ č鹊 ąĮą░čćąĖąĮą░čéčī.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąÆčŗą▒ąĖčĆą░ąĄą╝ čüčģąĄą╝čā BMS ą┤ą╗čÅ ąĘą░čĆčÅą┤ą░ ą╗ąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗčģ (LiFePO4) ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓
ą×ą▒čÅąĘą░č鹥ą╗čīąĮčŗą╝ čāčüą╗ąŠą▓ąĖąĄą╝ ą┤ąŠą╗ą│ąŠą╣ ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ Li-FePO4-ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ EVE Energy, čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ BMS-ą╝ąĖą║čĆąŠčüčģąĄą╝. ąøąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗąĄ ąÉąÜąæ ąŠčéą╗ąĖčćą░čÄčéčüčÅ čéą░ą║ąĖą╝ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ, ą║ą░ą║ ą▓čŗčüąŠą║ą░čÅ ą╝ąĮąŠą│ąŠą║čĆą░čéąĮąŠčüčéčī čåąĖą║ą╗ąŠą▓ ąĘą░čĆčÅą┤ą░-čĆą░ąĘčĆčÅą┤ą░, ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▒čŗčüčéčĆąŠą╣ ąĘą░čĆčÅą┤ą║ąĖ, čāčüč鹊ą╣čćąĖą▓ąŠčüčéčī ą║ ą▒čāč乥čĆąĮąŠą╝čā čĆąĄąČąĖą╝čā čĆą░ą▒ąŠčéčŗ ąĖ ą┐čĆąĖąĄą╝ą╗ąĄą╝ą░čÅ čüč鹊ąĖą╝ąŠčüčéčī. ąØąŠ ą┤ą╗čÅ čŹčéąĖčģ ąÉąÜąæ ąŠč湥ąĮčī ą▓ą░ąČąĄąĮ ą║ąŠąĮčéčĆąŠą╗čī ą┐čĆąŠčåąĄčüčüą░ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░ ą┤ą╗čÅ ąĖąĘą▒ąĄą│ą░ąĮąĖčÅ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĘą░čĆčÅą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ 100% ąĘą░čĆčÅą┤ą░. ąśąĮąČąĄąĮąĄčĆčŗ ąÜą×ą£ą¤ąŁąø ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖą╗ąĖ čüą┐ąĖčüąŠą║ čéą░ą║ąĖčģ čĆąĄčłąĄąĮąĖą╣ ąŠčé čĆą░ąĘąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
Ser60
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą║ąŠčĆą░ą▒ą╗ąĖą║ čüą▓ąŠąĖą╝ąĖ čĆčāą║ą░ą╝ąĖ. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą░ą▓ą│ 27, 2018 15:01:44 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 74
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 607
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą┤ąĄą║ 24, 2008 09:58:58
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3715
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 3
|
ą£ąĮąĄ ą▓čüčæ ąĄčēčæ ąĮąĄ čÅčüąĮąŠ č湥ą│ąŠ ą║ąŠąĮą║čĆąĄčéąĮąŠ čģąŠčéąĖč鹥 ą┤ąŠą▒ąĖčéčīčüčÅ ą▓ą▓ąĄą┤ąĄąĮąĖąĄąĮ ąĖąĘąĄčĆąĮąĄčéą░ ą▓ ą║ąŠčĆą░ą▒ą╗ą║. ą×ą┤ąĮą░ą║ąŠ, ąĄčüą╗ąĖ ą▓ ą┐ą╗ą░ąĮąĄ ąŠčüą▓ąŠąĄąĮąĖčÅ ąĮąŠą▓čŗčģ č鹥čģąĮąŠą╗ąŠą│ąĖą╣, ą┤ąŠčüčéą░č鹊čćąĮąŠ ą┐čĆąŠčüč鹊 ą┤ąŠą▒ą░ą▓ąĖčéčī ąĖąĘąĄčĆąĮąĄčé ą▓ ą┐čĆąŠąĄą║čé ą╝ąŠąČąĮąŠ ą┐čāčéčæą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐čĆąŠą┤čāą║čåąĖąĖ čäąĖčĆą╝čŗ WIZnet, ą║ą░ą║ čüą░ą╝ąĖčģ čćąĖą┐ąŠą▓, čéą░ą║ ąĖ ą╝ąŠą┤čāą╗ąĄą╣ ąĮą░ ąĖčģ ąŠčüąĮąŠą▓ąĄ. ąŻ ą╝ąĄąĮčÅ ąĄčüčéčī ąĘą┤ąĄčüčī čüčéą░čéčīčÅ ą┐čĆąŠ ą┐ą┤ąĖąĮ ąĖąĘ čéą░ą║ąĖčģ. ąĪąĄą│ąŠą┤ąĮčÅ čā čäąĖčĆą╝čŗ ąĖą╝ąĄčÄčéčüčÅ ą▒ąŠą╗ąĄąĄ ąĮąŠą▓čŗąĄ čĆąĄčłąĄąĮąĖčÅ, ą▓ ą░ą┐ąĮąŠčāčéą░čģ ąĮą░ą╣ą┤čæč鹥 ą┤ą░ąČąĄ ą┐čĆąĖą╝ąĄčĆčŗ ąĖčģ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĮą░ ąĪ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
roman.com
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą║ąŠčĆą░ą▒ą╗ąĖą║ čüą▓ąŠąĖą╝ąĖ čĆčāą║ą░ą╝ąĖ. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą░ą▓ą│ 27, 2018 19:23:40 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 13, 2012 12:16:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6882
ą×čéą║čāą┤ą░: .ru
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
https://radiokot.ru:443/circuit/digital/measure/114/ - ąöą░, ąĖąĮč鹥čĆąĄčüąĮąŠ. ąĪą┐ą░čüąĖą▒ąŠ. ąŻąČąĄ ąĘą░ą║ą░ąĘą░ą╗ ą╝ąŠą┤čāą╗ąĖ ąĮą░ W5500. ąĪčāą┤čÅ ą┐ąŠ č乊čĆčāą╝ą░ą╝ - čüą░ą╝čŗą╣ ą╗čāčćčłąĖą╣ ąĖąĘ čüą▓ąŠąĄą╣ čüąĄčĆąĖąĖ. ąĪ ąĮąĄą│ąŠ ąĖ ąĮą░čćąĮčæą╝)) ąÉ ą┐ąŠą║ą░ ą╝ąŠą┤čāą╗čī ąĄą┤ąĖčé (ąĖąĘ ąÜąĖčéą░čÅ ą┐čāčéčī ąĮąĄ ą▒ą╗ąĖąĘą║ąĖą╣), čģąŠč鹥ą╗ąŠčüčī ą▒čŗ ąĄčēčæ čĆą░čüčüą╝ąŠčéčĆąĄčéčī ąŠą┤ąĖąĮ ą▓ą░čĆąĖą░ąĮčé. ą¤čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüč鹥ą║ čüąĄč鹥ą▓čŗčģ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓, čéą░ą║ąĖčģ ą║ą░ą║ TCP, UDP, IP, ARP... ą╝ąĄąĮčÅ ąĮąĄ ą┐čāą│ą░ąĄčé)) ąÆ ąĖąĮąĄč鹥 ą║čāčćą░ čüčéą░č鹥ą╣ ąĮą░ čŹčéčā č鹥ą╝čā. ąØą░ą┐čĆąĖą╝ąĄčĆ ą▓ąŠčé - http://we.easyelectronics.ru/electro-an ... erver.htmląĢčüčéčī ąĄčēčæ ąŠą┤ąĮą░ ąĖąĮč鹥čĆąĄčüąĮą░ ąĖą┤ąĄčÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą£ąÜ ąĮą░ą┐čĆčÅą╝čāčÄ ą║ čĆąŠčāč鹥čĆčā (ąĖą╗ąĖ čüąĄč鹥ą▓ąŠą╣ ą║ą░čĆč鹥). ąØą░ą┐čĆąĖą╝ąĄčĆ čéčāčé ą┐ąŠą┤ą║ą╗čÄčćąĖą╗ąĖ ąĮą░ą┐čĆčÅą╝čāčÄ - http://we.easyelectronics.ru/plis/softo ... ase-t.htmląś ą▓ąŠčé čéčāčé č鹊ąČąĄ ą┐ąŠą┤ą║ą╗čÄčćąĖą╗ąĖ ą£ąÜ ąĮą░ą┐čĆčÅą╝čāčÄ, ą┐čĆąĖčćčæą╝ ąĮą░ą┐čĆčÅą╝čāčÄ ą▓ ą┐ąŠčĆčé ą║ąŠą╝ą╝čāčéą░č鹊čĆą░, ą▒ąĄąĘ čéčĆą░ąĮčüč乊čĆą╝ą░č鹊čĆą░ (!) - https://marsohod.org/index.php/projects/94-ether-sendąś čé.ą┤. ąÆčüčæ ą│ąŠą▓ąŠčĆąĖčé ąŠ č鹊ą╝, čćč鹊 čŹč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ)) ąóąŠą│ą┤ą░ ą▓ąŠąĘąĮąĖą║ą░ąĄčé ą▓ąŠą┐čĆąŠčü - ą╝ąŠąČąĮąŠ ą╗ąĖ ą▓ą╝ąĄčüč鹊 ą¤ąøąśąĪ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ATmega8, čü čĆąĄą░ą╗čīąĮąŠą╣ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹊ą╣ 25 ą£ąōčå... ąś ą║ą░ą║ čŹč鹊 ą╗čāčćčłąĄ čüą┤ąĄą╗ą░čéčī? )) ąÜ čüąŠąČą░ą╗ąĄąĮąĖčÄ ą▓čŗčüąŠą║ąŠčćą░čüč鹊čéąĮąŠą│ąŠ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░čäą░ ą┐ąŠą┤ čĆčāą║ąŠą╣ ąĮąĄčé, ą┐ąŠčüą╝ąŠčéčĆąĄčéčī čüąĖą│ąĮą░ą╗ ąĮą░ ą▓čŗčģąŠą┤ąĄ čüąĄč鹥ą▓ąŠą╣ ą║ą░čĆčéčŗ ą┐ąŠą║ą░ ąĮąĄ ą╝ąŠą│čā, ąĮąŠ ąĄčüčéčī ąŠčüčåąĖą╗ą╗ąŠą│čĆą░ą╝ą╝čŗ ą▓ ąĖąĮąĄč鹥)) ąØą░ą┐čĆąĖą╝ąĄčĆ ą▓ąŠčé čéą░ą║ ą▓čŗą│ą╗čÅą┤ąĖčé čüąĖą│ąĮą░ą╗ Ethernet 10Base-T ąĮą░ ą▓čŗčģąŠą┤ąĄ čüąĄč鹥ą▓čāčģąĖ: ąÆą╗ąŠąČąĄąĮąĖąĄ:
čüąĖą│ąĮą░ą╗ Ethernet 10Base-T.gif [14.05 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 363
ą¦čæčéą║ąŠ ą▓ąĖą┤ąĄąĮ "ą╝ą░ąĮč湥čüč鹥čĆ")) ąÉ ą▓ąŠčé ą┐čĆąĄą░ą╝ą▒čāą╗ą░ (čüąĖą│ąĮą░ą╗ ą┐ąŠčģąŠąČąĄ ąĖąĮą▓ąĄčĆčéąĖčĆąŠą▓ą░ąĮ)- 10101010 10101010 10101010 10101010 10101010 10101010 10101010 ąÆą╗ąŠąČąĄąĮąĖąĄ:
preamble Ethernet 10Base-T.jpg [63.53 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 426
ąÉ ą▓ąŠčé čüąĖą│ąĮą░ą╗ čüčéą░čĆčé ą▒ą░ą╣čéą░ (čüąĖą│ąĮą░ą╗ ą┐ąŠčģąŠąČąĄ ąĖąĮą▓ąĄčĆčéąĖčĆąŠą▓ą░ąĮ)- 10101011 (čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ Start of frame delimiter). ąÆą╗ąŠąČąĄąĮąĖąĄ: ąś čé.ą┤. )) ąÆąŠąŠą▒čēąĄą╝ čüą╝čŗčüą╗ čÅčüąĄąĮ)) ąóą░ą║ąŠą╣ ąČąĄ ą╝ą░ąĮč湥čüč鹥čĆ, ą║ą░ą║ ą▓ ąĮą░čłąĄą╝ ą║ąŠčĆą░ą▒ą╗ąĖą║ąĄ ąĮą░ čüą░ą╝ąŠą┤ąĄą╗čīąĮčŗčģ ą╝ąŠą┤čāą╗čÅčģ)) ąóąŠą╗čīą║ąŠ ąŠą┤ąĮą░ ą┐čĆąŠą▒ą╗ąĄą╝ą░... ą▓ ą║ąŠčĆą░ą▒ą╗ąĖą║ąĄ čćą░čüč鹊čéą░ ą╝ą░ąĮč湥čüč鹥čĆą░ 1 ą║ąōčå, ą░ ą▓ Ethernet 10Base-T čćą░čüč鹊čéą░ ą╝ą░ąĮč湥čüč鹥čĆą░ 10 ą£ąōčå... )) ąÉ ą▓ ąŠčüčéą░ą╗čīąĮąŠą╝ ą▓čüčæ č鹊ąČąĄ čüą░ą╝ąŠąĄ)) ąóąĄą┐ąĄčĆčī čüąŠą▓čüčéą▓ąĄąĮąĮąŠ ą▓ąŠą┐čĆąŠčü - ą║ą░ą║ ATmega8, čü ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹊ą╣ 25 ą£ąōčå... ą┤ąŠą╗ąČąĮą░ ąĘą░ą┐ąĖčüą░čéčī čüąĖą│ąĮą░ą╗ 10 ą£ąōčå? )) ą¤ąĄčĆą▓ąŠąĄ čćč鹊 ą┐čĆąĖčģąŠą┤ąĖčé ąĮą░ čāą╝ - ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ąĮąĄčłąĮąĖą╣ ą▒čāč乥čĆ... ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĮą░ ą┤ą▓čāčģ čüą┤ą▓ąĖą│ąŠą▓čŗčģ čĆąĄą│ąĖčüčéčĆą░čģ... ąĖą╗ąĖ ą╝ąŠąČąĮąŠ ą┐čĆąĖą┤čāą╝ą░čéčī ąĄčēčæ čćč鹊-č鹊))
ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ čĆą░ąĘ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī roman.com ą¤ąĮ ą░ą▓ą│ 27, 2018 22:24:42, ą▓čüąĄą│ąŠ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī 1 čĆą░ąĘ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Ser60
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą║ąŠčĆą░ą▒ą╗ąĖą║ čüą▓ąŠąĖą╝ąĖ čĆčāą║ą░ą╝ąĖ. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą░ą▓ą│ 27, 2018 22:22:23 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 74
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 607
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą┤ąĄą║ 24, 2008 09:58:58
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3715
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 3
|
ąöą░, ą╝čŗ čüąŠ čüčéčāą┤ąĄąĮčéą░ą╝ąĖ ą┤ąĄą╗ą░ą╗ąĖ ą┐čĆąŠąĄą║čéčŗ ąĖ ąĮą░ W5500. ą×ąĮąĖ čüąĄą╣čćą░čü ą▓čŗą┐čāčüą║ą░čÄčéčüčÅ ąĮą░ ą┐ą╗ą░čéą░čģ ą┐čĆąĖą╝ąĄčĆąĮąŠ č鹊ą│ąŠ-ąČąĄ čĆą░ąĘą╝ąĄčĆą░, čćč鹊 ąĖ čüčéą░čĆčŗąĄ WIZ820. ą”ąĖčéą░čéą░: ąóąĄą┐ąĄčĆčī čüąŠą▓čüčéą▓ąĄąĮąĮąŠ ą▓ąŠą┐čĆąŠčü - ą║ą░ą║ ATmega8, čü ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹊ą╣ 25 ą£ąōčå... ą┤ąŠą╗ąČąĮą░ ąĘą░ą┐ąĖčüą░čéčī čüąĖą│ąĮą░ą╗ 10 ą£ąōčå? ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ąĮąĖąĘčłąĖąĄ čāčĆąŠą▓ąĮąĖ čüč鹥ą║ą░ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓, č鹥ą╝ ą▒ąŠą╗ąĄąĄ ąĮą░ ą╝ąĄą│ąĄ, ąĮąĄ ąĄčüčéčī ą┐čĆą░ą▓ąĖą╗čīąĮąŠ. ą¤ąŠ ą║čĆą░ą╣ąĮąĄą╣ ą╝ąĄčĆąĄ čÅ čüą╝čŗčüą╗ą░ ą▓ čŹč鹊ą╝ ąĮąĄ ą▓ąĖąČčā ąĮąĖą║ą░ą║ąŠą│ąŠ. ą£čÅą│č湥 ą│ąŠą▓ąŠčĆčÅ ąĖ ą┤čĆčāą│ąĖą╝ąĖ čüą╗ąŠą▓ą░ą╝ąĖ, ą╝ąĮąĄ čŹč鹊 ąĮąĄ ąĖąĮč鹥čĆąĄčüąĮąŠ. ąöą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčé Ethernet ą┤čĆą░ą╣ą▓ąĄčĆčŗ čéąĖą┐ą░ ENC28J60 (ą▓ čüąĄčéąĖ č鹊ąČąĄ ą║čāčćą░ ą┐čĆąĖą╝ąĄčĆąŠą▓ čü ąĮąĖą╝), ą║ąŠč鹊čĆčŗąĄ čĆąĄą░ą╗ąĖąĘčāčÄčé PHY ąĖą╗ąĖ ą╗čāčćčłąĄ MAC+PHY čāčĆąŠą▓ąĮąĖ, ą▓ čüą▓čÅąĘą║ąĄ čü ą£ąÜ. ą¤ąŠą╝ąĮčÄ, ą╗ąĄčé 10 ąĮą░ąĘą░ą┤ ąĘą░ąĮąĖą╝ą░ą╗čüčÅ ą┐ąŠą┤ąŠą▒ąĮčŗą╝ ą┐čĆąŠąĄą║č鹊ą╝ ą▓ ą║čāą┐ąĄ čü dsPIC33, čćč鹊ą▒čŗ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ą▓čŗčüčłąĖčģ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ ą▓ ą┐ą░ą╝čÅčéčī ą▓ą╗ąĄąĘą╗ą░, ąĮąŠ ą┐ąŠč鹊ą╝ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą┐ąĄčĆąĄčłčæą╗ ąĮą░ ą╝ąŠą┤čāą╗ąĖ WIZnet, čģąŠčéčÅ ąŠąĮąĖ ąĖ ąĮąĄ ą▒ąĄąĘ "ąĘą░ą║ąĖą┤ąŠąĮąŠą▓".
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
roman.com
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą║ąŠčĆą░ą▒ą╗ąĖą║ čüą▓ąŠąĖą╝ąĖ čĆčāą║ą░ą╝ąĖ. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą░ą▓ą│ 27, 2018 23:43:56 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 13, 2012 12:16:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6882
ą×čéą║čāą┤ą░: .ru
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąöąŠ 16 ą▒ąĖčéąĮčŗčģ dsPIC33 čÅ ąĄčēčæ ąĮąĄ ą┤ąŠčłčæą╗... ąśčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ENC28J60 ąĮąĄ ą▓ąĖąČčā čüą╝čŗčüą╗ą░... ąĘą░ čéčāąČąĄ čåąĄąĮčā ą╗čāčćčłąĄ ą║čāą┐ąĖčéčī W5500 čü ą░ą┐ą░čĆą░čéąĮąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĄą╣ čüč鹥ą║ą░ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓)) Ser60 ą┐ąĖčüą░ą╗(ą░): ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ąĮąĖąĘčłąĖąĄ čāčĆąŠą▓ąĮąĖ čüč鹥ą║ą░ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓, č鹥ą╝ ą▒ąŠą╗ąĄąĄ ąĮą░ ą╝ąĄą│ąĄ, ąĮąĄ ąĄčüčéčī ą┐čĆą░ą▓ąĖą╗čīąĮąŠ. ą£čŗ ąĮą░ čüą░ą╣č鹥 čĆą░ą┤ąĖąŠą╗čÄą▒ąĖč鹥ą╗ąĄą╣... ąÆčüčæ čćč鹊 čéčāčé ą┤ąĄą╗ą░čÄčé ą╗čÄą┤ąĖ - ą▓čüčæ ąĮąĄ ąĄčüčéčī ą┐čĆą░ą▓ąĖą╗čīąĮąŠ.)) ąśą╗ąĖ (ą║ ą┐čĆąĖą╝ąĄčĆčā) ą┐ąŠ ąÆą░čłąĄą╝čā čüąŠą▒ąĖčĆą░čéčī čüą░ą╝ąŠą┤ąĄą╗čīąĮčŗąĄ čĆą░ą┤ąĖąŠą┐čĆąĖčæą╝ąĮąĖą║ąĖ ąĮą░ čĆą░ą┤ąĖąŠą╗ą░ą╝ą┐ą░čģ... ą▓ 21 ą▓ąĄą║ąĄ - čŹč鹊 ąĄčüčéčī ą┐čĆą░ą▓ąĖą╗čīąĮąŠ? )) ąÉ ąĖą╝ąĄąĮąĮąŠ čŹčéąĖą╝ ą╝ąĮąŠą│ąĖąĄ čéčāčé ąĖ ąĘą░ąĮąĖą╝ą░čÄčéčüčÅ. ąØą░čłčæą╗!))- https://www.fpga4fun.com/10BASE-T4.htmląĪą░ą╝ąŠą┤ąĄą╗čīąĮčŗą╣ Ethernet 10Base-T ą░ą┤ą░ą┐č鹥čĆ ąĮą░ ą┐čĆąŠčüč鹊ą╣ ą╗ąŠą│ąĖą║ąĄ)) (ą┤ą░ąČąĄ č乊č鹊 ąĄčüčéčī) - http://www.aholme.co.uk/Ethernet/EthernetRx.htmąś ą┐čĆąŠ ą║ą░ą║ąĖąĄ čüč鹥ą║ąĖ ą╝čŗ ą▓ąŠąŠą▒čēąĄ ą│ąŠą▓ąŠčĆąĖą╝ ? ąöą╗čÅ čĆą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (ąĖ č鹥ą╗ąĄą╝ąĄčéčĆąĖąĖ) ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ ą┐ą░ą║ąĄčé čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą┤ą╗ąĖąĮčŗ. ąŚą░ą┐ąĖčüą░čéčī ą┤ą░ąĮąĮčŗąĄ ą▓ ą╝ą░čüčüąĖą▓, ą┐ąŠčüčćąĖčéą░čéčī ą║ąŠąĮčéčĆąŠą╗čīąĮčāčÄ čüčāą╝ą╝čā ąĖ ąŠčéą┐čĆą░ą▓ąĖčéčī ą┐ą░ą║ąĄčé ą┐ąŠ čüąĄčéąĖ... ąöą╗čÅ čŹč鹊 ąĮąĄ ąĮčāąČąĮčŗ čüč鹥ą║ąĖ)) - https://www.fpga4fun.com/10BASE-T2.htmlą×ą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▓čüčæ čāąČąĄ ą┐čĆąĖą┤čāą╝ą░ąĮąŠ ąĘą░ ąĮą░čü))
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Ser60
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą║ąŠčĆą░ą▒ą╗ąĖą║ čüą▓ąŠąĖą╝ąĖ čĆčāą║ą░ą╝ąĖ. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą░ą▓ą│ 28, 2018 05:05:37 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 74
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 607
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą┤ąĄą║ 24, 2008 09:58:58
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3715
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 3
|
ą”ąĖčéą░čéą░: ąĘą░ čéčāąČąĄ čåąĄąĮčā ą╗čāčćčłąĄ ą║čāą┐ąĖčéčī W5500 čü ą░ą┐ą░čĆą░čéąĮąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĄą╣ čüč鹥ą║ą░ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ ąöąĄą╗ąŠ ąĮąĄ ą▓ čåąĄąĮąĄ. ąĀą░ąĮąŠ ąĖą╗ąĖ ą┐ąŠąĘą┤ąĮąŠ ąĮą░čéą║ąĮčæč鹥čüčī ąĮą░ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ ąĖ ąĮąĄą│ąĖą▒ą║ąŠčüčéčī ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ ą▓ W5500. ąĪ ą┤ąŠą╝ą░čłąĮąĖą╝ čĆąŠčāč鹥čĆąŠą╝ čüą║ąŠčĆąĄąĄ ą▓čüąĄą│ąŠ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ą▒ąĄąĘ ą┐čĆąŠą▒ą╗ąĄą╝. ą×ą┤ąĮą░ą║ąŠ, ąĮą░ ą║ą░ą╝ą┐čāčüąĄ čā ąĮą░čü ą┐ąŠč鹊ą╝ ą┐ąŠčüčéą░ą▓ąĖą╗ąĖ čüą╗ąĖčłą║ąŠą╝ čāą╝ąĮčŗąĄ ąŠą│čĆąŠą╝ąĮčŗąĄ čüą▓ąĖčéčćąĖ ąĖ čĆąŠčāč鹥čĆčŗ čü čģąĖčéčĆąŠą╣ čüčģąĄą╝ąŠą╣ 菹║ąŠąĮąŠą╝ąĖąĖ 菹ĮąĄčĆą│ąĖąĖ ąĖ ą┤ąŠą╝ą░čłąĮčÅčÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ąĮąĄ ą▓čüąĄą│ą┤ą░ čüčĆą░ą▒ą░čéčŗą▓ą░ą╗ą░. ąĢčēčæ ą┐ąŠąĘąČąĄ ą▓ąĄčüčī ą║ą░ą╝ą┐čāčü ą┐ąĄčĆąĄą▓ąĄą╗ąĖ ą┐ąŠą┤ IPv6 ąĖ W5500 ą║ąŠąĮčćąĖą╗ą░čüčī (ąĮčāąČąĮą░ ą▒čŗą╗ą░ ą┐ąŠą╗ąĮą░čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ IPv6 ą▓ą║ą╗čÄčćą░čÅ DHCPv6). ąÆąŠčé čéčāčé-č鹊 ąĖ ą▓čüą┐ąŠą╝ąĮąĖčéčüčÅ ENC28 čü ą│ąĖą▒ą║ąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĄą╣ čüč鹥ą║ąŠą▓. ą£ąŠąČąĄčé ąĖ ąĄčüčéčī ą│ą┤ąĄ-č鹊 ą░ą┤ą░ą┐čéą░čåąĖčÅ W5500 ą┤ą╗čÅ ą▓čüąĄą│ąŠ čŹč鹊ą│ąŠ, ąĮąŠ čÅ ąĖčüą║ą░čéčī ąĮąĄ čüčéą░ą╗ ąĖąĘ-ąĘą░ ąĮąĄą░ą║čéčāą░ą╗čīąĮąŠčüčéąĖ ąĖ ą┐ąĄčĆąĄčłčæą╗ ąĮą░ "ąĮąŠčĆą╝ą░ą╗čīąĮčŗą╣" ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ (ąÜąĖąĮąĄčéąĖčü ąÜ64) čü ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ ą╝ąŠą┤čāą╗ąĄą╝ MAC-NET ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĄą╣ ą▓ąĄčĆčģąĮąĖčģ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓. ąÉ ą┐ąŠąĘąČąĄ ąĮą░ WiFi, ą║ąŠč鹊čĆą░čÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą¤ą× ą╝ąŠą┤čāą╗ąĄą╣ ą│ąŠčĆą░ąĘą┤ąŠ ą╗čāčćčłąĄ, č湥ą╝ ą▓čüčéčĆąŠąĄąĮąĮčŗąĄ čüąĄč鹥ą▓čŗąĄ ą┐čĆąŠč鹊ą║ąŠą╗čŗ ą▓ W5500. ą”ąĖčéą░čéą░: ąś ą┐čĆąŠ ą║ą░ą║ąĖąĄ čüč鹥ą║ąĖ ą╝čŗ ą▓ąŠąŠą▒čēąĄ ą│ąŠą▓ąŠčĆąĖą╝ ? ąĪą╝. ą┐čĆąŠ čüąĄč鹥ą▓čāčÄ ą╝ąŠą┤ąĄą╗čī OSI: ą”ąĖčéą░čéą░: ąĖ ąŠčéą┐čĆą░ą▓ąĖčéčī ą┐ą░ą║ąĄčé ą┐ąŠ čüąĄčéąĖ... ąöą╗čÅ čŹč鹊 ąĮąĄ ąĮčāąČąĮčŗ čüč鹥ą║ąĖ ąĪą╝ąŠčéčĆčÅ ą┐ąŠ ą║ą░ą║ąŠą╣ čüąĄčéąĖ ąĖ čćč鹊 ąĘąĮą░čćąĖčé "ąŠčéą┐čĆą░ą▓ąĖčéčī". ąĢčüą╗ąĖ čüą▓čÅąĘčī č鹊čćą║ą░-č鹊čćą║ą░ ą┐ąŠ ą┐čĆąĖą▓ą░čéąĮąŠą╝čā ą║ą░ąĮą░ą╗čā čü čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮčŗą╝ ą┐ąŠą╗čāčćą░č鹥ą╗ąĄą╝, č鹊 čŹč鹊 ąŠą┤ąĮąŠ. ą¤čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥 ą┤ą░ąĮąĮčŗčģ ą┐ąŠ čüąĄčéąĖ ąśąĮč鹥čĆąĮąĄčé (ąĖą╗ąĖ ą╗čÄą▒ąŠą╣ ą┤čĆčāą│ąŠą╣ ą║ąŠą╝ą╝ąĄčĆč湥čüą║ąŠą╣) čüčāčēąĄčüčéą▓čāčÄčé ąŠą┐čĆąĄą┤ąĄą╗čæąĮąĮčŗąĄ ą┐čĆą░ą▓ąĖą╗ą░ (=ą┐čĆąŠč鹊ą║ąŠą╗čŗ ąĖ ąĖčģ čüąŠą▓ąŠą║čāą┐ąĮąŠčüčéčī ąĖ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ čüč鹥ą║ąŠą╝). ąĢčüą╗ąĖ ą▒čāą┤ąĄč鹥 čĆąĄą░ą╗ąĖąĘąŠą▓čŗą▓ą░čéčī čüą▓ąŠą╣ ą┐čĆąĖą▓ą░čéąĮčŗą╣ ą║ą░ąĮą░ą╗ ą┤ą╗čÅ čĆą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ ą░ą╗ą│ąŠčĆąĖčéą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą▓čüčæ čü ąĮčāą╗čÅ ąĖ ą┐ąŠ-čüą▓ąŠąĄą╝čā, č鹊, ą║ąŠąĮąĄčćąĮąŠ, čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ čüč鹥ą║ąĖ ąĮąĄ ąĮčāąČąĮčŗ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
roman.com
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą║ąŠčĆą░ą▒ą╗ąĖą║ čüą▓ąŠąĖą╝ąĖ čĆčāą║ą░ą╝ąĖ. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą░ą▓ą│ 28, 2018 12:13:06 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 13, 2012 12:16:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6882
ą×čéą║čāą┤ą░: .ru
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
Ser60 ą┐ąĖčüą░ą╗(ą░): ąĪą╝. ą┐čĆąŠ čüąĄč鹥ą▓čāčÄ ą╝ąŠą┤ąĄą╗čī OSI: ąöą░ ąĘąĮą░čÄ čÅ ą╝ąŠą┤ąĄą╗čī OSI )) Ser60 ą┐ąĖčüą░ą╗(ą░): ą║ą░ą╝ą┐čāčü ą┐ąĄčĆąĄą▓ąĄą╗ąĖ ą┐ąŠą┤ IPv6 IPv6 ą▓ ąĮą░čłąĄą╣ ą┤ąĄčĆąĄą▓ąĮąĄ ą┐ąŠčÅą▓ąĖčéčüčÅ ąĄčēčæ ąĮąĄ čüą║ąŠčĆąŠ..)) Ser60 ą┐ąĖčüą░ą╗(ą░): ą▓čüą┐ąŠą╝ąĮąĖčéčüčÅ ENC28 čü ą│ąĖą▒ą║ąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĄą╣ čüč鹥ą║ąŠą▓. ą£ąŠąČąĄčé ąĖ ąĄčüčéčī ą│ą┤ąĄ-č鹊 ą░ą┤ą░ą┐čéą░čåąĖčÅ W5500 ąĪčāą┤čÅ ą┐ąŠ ą┤ą░čéą░čłąĖčéčā, čā ą▓čüąĄčģ W5100, W5200, W5500... ąĖ čé.ą┤. ąĄčüčéčī čĆąĄąČąĖą╝ MAC RAW. ą”ąĖčéą░čéą░ ąĖąĘ ą┤ą░čéą░čłąĖčéą░: "čĆąĄąČąĖą╝ MAC RAW (Socket 0) ą╝ąŠąČąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą┐ą░ą║ąĄčé MAC (Ethernet-ą║ą░ą┤čĆ) ą▒ąĄąĘ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ" ... ąÆ ą┤ą░čéą░čłąĖč鹥 ą┤ą░ąČąĄ ąĮą░čĆąĖčüąŠą▓ą░ą╗ąĖ MAC RAW: ąÆą╗ąŠąČąĄąĮąĖąĄ:
MAC raw.jpg [54.17 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 535
ąÜąŠčĆąŠč湥, ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝ ą£ąÉąĪ ą░ą┤čĆąĄčü ąĖ ą┤ą╗ąĖąĮčā Ethernet-ą║ą░ą┤čĆą░, ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüč鹥ą║ čüąĄč鹥ą▓čŗčģ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓, čéą░ą║ąĖčģ ą║ą░ą║ TCP, UDP, IP, ARP... ąĖ čé.ą┤. ą┐ąĖčłąĄą╝ čüą░ą╝ąĖ)) Ser60 ą┐ąĖčüą░ą╗(ą░): ąĪą╝ąŠčéčĆčÅ ą┐ąŠ ą║ą░ą║ąŠą╣ čüąĄčéąĖ ąĖ čćč鹊 ąĘąĮą░čćąĖčé "ąŠčéą┐čĆą░ą▓ąĖčéčī". ąöą╗čÅ čĆą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ą╗ąŠą║ą░ą╗čīąĮąŠą╣ čüąĄčéąĖ) ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╗čÄą▒ąŠą╣ ą┐čĆąŠč鹊ą║ąŠą╗. ąöą░ąČąĄ ą┐čĆąŠčüč鹊 MAC RAW)) ąæčāą┤ąĄą╝ ą┐čĆąŠčüč鹊 ą│ąŠąĮčÅčéčī Ethernet-ą║ą░ą┤čĆčŗ ą┐ąŠ čüąĄčéąĖ)) ąóąŠą╗čīą║ąŠ ą▒ąŠčÄčüčī ą╝ąŠą╣ čĆąŠčāč鹥čĆ ąĮąĄ ą╝ąŠą╣ą╝čæčé... ąŁč鹊 ą▓ą░ą╝ ąĮąĄ čüą▓ąĖčéčć)) ąźąŠčéčÅ ąĮąĄ ąĘąĮą░čÄ... čŹč鹊 ąĮą░ą┤ąŠ ą▒čāą┤ąĄčé ą┐čĆąŠą▓ąĄčĆąĖčéčī)) ąØčā čģąŠčĆąŠčłąŠ, č鹊ą│ą┤ą░ ą┤ą╗čÅ ą╝ą░čĆčłčāčéąĖąĘą░čåąĖąĖ ą┐ąŠ čüąĄčéąĖ (ą╗ąŠą║ą░ą╗čīąĮąŠą╣ ąĖą╗ąĖ čü ą▓čŗčģąŠą┤ąŠą╝ ą▓ ąśąĮč鹥čĆąĮąĄčé) ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ ą┐čĆąŠčüč鹊ą╣ ą┐čĆąŠč鹊ą║ąŠą╗ UDP. ))
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
roman.com
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą║ąŠčĆą░ą▒ą╗ąĖą║ čüą▓ąŠąĖą╝ąĖ čĆčāą║ą░ą╝ąĖ. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé čüąĄąĮ 07, 2018 17:23:44 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 13, 2012 12:16:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6882
ą×čéą║čāą┤ą░: .ru
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąóą░ą║čü.. ąĖ čćč鹊 čā ąĮą░čü čéčāčé)) ą¤čĆąĖąĄčģą░ą╗ąĖ ą▓ąŠčé čéą░ą║ąĖąĄ ą╝ąŠą┤čāą╗ąĖ ą┤ą╗čÅ ąĮą░čłąĄą│ąŠ ą║ąŠčĆą░ą▒ą╗ąĖą║ą░)) ąØą░ W5500. ąÆą╗ąŠąČąĄąĮąĖąĄ:
image02.jpg [25.38 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 723
ąóąĄą┐ąĄčĆčī ąĮą░ą┤ąŠ ą║čāčĆąĖčéčī ą┤ą░čéą░čłąĖčé... )) ą¤ąĖą┐ąĄčå "ą║ąĖčéą░ą╣čåčŗ" čéą░ą╝ čĆą░čüą┐ąĖčüą░ą╗ąĖ... ))
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
roman.com
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą║ąŠčĆą░ą▒ą╗ąĖą║ čüą▓ąŠąĖą╝ąĖ čĆčāą║ą░ą╝ąĖ. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ čüąĄąĮ 10, 2018 16:54:39 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 13, 2012 12:16:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6882
ą×čéą║čāą┤ą░: .ru
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą¤čĆąŠą┤ąŠą╗ąČąĖą╝ č鹥čüčéąĖčĆąŠą▓ą░čéčī ą╝ąŠą┤čāą╗čī W5500. ąÆąŠčé čéčāčé ą┐ąŠą┤ą║ą╗čÄčćąĖą╗ąĖ ą£ąÜ ą║ ą╗ąŠą║ą░ą╗čīąĮąŠą╣ čüąĄčéąĖ - http://we.easyelectronics.ru/electro-an ... i-cgi.html ą¤ąŠą▓č鹊čĆąĖą╝ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčé...)) ąæąĄčĆčæą╝ čüčģąĄą╝čā ąĮą░čłąĄą│ąŠ ą║ąŠčĆą░ą▒ą╗ąĖą║ą░ ąÆą╗ąŠąČąĄąĮąĖąĄ:
Nokia 5110.JPG [128.35 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 386
ąÆą╝ąĄčüč鹊 čĆą░ą┤ąĖąŠą╝ąŠą┤čāą╗čÅ nRF24L01+ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝ ąĖąĘąĄčĆąĮąĄčé ą╝ąŠą┤čāą╗čī W5500 ąÆą╗ąŠąČąĄąĮąĖąĄ:
W5500.jpg [158.93 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 585
ąóąĄą┐ąĄčĆčī čüą┤ąĄą╗ą░ąĄą╝ ąĮą░ ą▒ą░ąĘąĄ W5500 ą┐čĆąŠčüč鹥ąĮčīą║ąĖą╣ ŌĆ£TCP SERVERŌĆØ. ąØą░čüčéčĆą░ąĖą▓ą░ąĄą╝ W5500 ą▓ čĆąĄąČąĖą╝ TCP/IP čüąŠą│ą╗ą░čüąĮąŠ ą┤ą░čéą░čłąĖčéčā ąŠčé ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ. ( https://wizwiki.net/wiki/doku.php?id=pr ... p_function) ą¤ąĖčłąĄą╝ ą▓ ą┐ą░ą╝čÅčéčī ą£ąÜ HTML ( https://ru.wikipedia.org/wiki/HTML) čüčéčĆąŠą║čā <html>ą¤čĆąĖą▓ąĄčé ąŠčé ą║ąŠčĆą░ą▒ą╗ąĖą║ą░!</html>ą¤čĆąŠą▓ąĄčĆčÅąĄą╝: ąÆ čüčéčĆąŠą║ąĄ ą▒čĆą░čāąĘąĄčĆą░ ą┐ąĖčłąĄą╝ ą╗ąŠą║ą░ą╗čīąĮčŗą╣ IP ą░ą┤čĆąĄčü ąĮą░čłąĄą│ąŠ ą║ąŠčĆą░ą▒ą╗ąĖą║ą░ (192.168.0.2). ąÆą╗ąŠąČąĄąĮąĖąĄ:
ąŚą░ą┐čĆąŠčü ą║ąŠčĆą░ą▒ą╗ąĖą║čā.jpg [23.51 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 431
ą¤ąŠą┤ą║ą╗čÄčćą░ąĄą╝čüčÅ ą║ ą║ąŠčĆą░ą▒ą╗ąĖą║čā ą┐ąŠ ą╗ąŠą║ą░ą╗čīąĮąŠą╣ čüąĄčéąĖ... ąÜąŠą╝ą┐čīčÄč鹥čĆ (192.168.0.3) ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ą║ąŠčĆą░ą▒ą╗ąĖą║čā GET ąĘą░ą┐čĆąŠčü... ąÜąŠčĆą░ą▒ą╗ąĖą║ ąĮą░ą╝ ą▓ ąŠčéą▓ąĄčé ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé HTML čüčéčĆąŠą║čā <html>ą¤čĆąĖą▓ąĄčé ąŠčé ą║ąŠčĆą░ą▒ą╗ąĖą║ą░!</html>ąÆą╗ąŠąČąĄąĮąĖąĄ:
ą×čéą▓ąĄčé ą║ąŠčĆą░ą▒ą╗ąĖą║ą░.jpg [29.57 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 328
ąÆčüčæ čĆą░ą▒ąŠčéą░ąĄčé... )) ąĪą╝ąŠčéčĆąĖą╝ ą░ąĮą░ą╗ąĖąĘą░č鹊čĆ čéčĆą░čäąĖą║ą░: ąÆą╗ąŠąČąĄąĮąĖąĄ:
ąŠčéčćčæčé 4_1.jpg [168.71 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 697
ąŚą░ą╝ąĄčćą░č鹥ą╗čīąĮąŠ)) ąÜąŠčĆą░ą▒ą╗ąĖą║ ą▓ čĆąĄąČąĖą╝ąĄ ŌĆ£TCP SERVERŌĆØ čā ąĮą░čü čĆą░ą▒ąŠčéą░ąĄčé.)) ąóąĄą┐ąĄčĆčī čā ąĮą░čłąĄą│ąŠ ą║ąŠčĆą░ą▒ą╗ąĖą║ą░ ą┐ąŠčÅą▓ąĖą╗ą░čüčī čüą▓ąŠčÅ ąÆąĄą▒-čüčéčĆą░ąĮąĖčåą░)) ----------
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
roman.com
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą║ąŠčĆą░ą▒ą╗ąĖą║ čüą▓ąŠąĖą╝ąĖ čĆčāą║ą░ą╝ąĖ. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé čüąĄąĮ 11, 2018 23:00:19 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 13, 2012 12:16:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6882
ą×čéą║čāą┤ą░: .ru
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąóąĄą┐ąĄčĆčī ąĮą░ą┤ąŠ č湥ą╝-ąĮąĖą▒čāą┤čī ą┐ąŠčāą┐čĆą░ą▓ą╗čÅčéčī... ąØą░ą┐čĆąĖą╝ąĄčĆ ą▓ą║ą╗čÄčćąĖčéčī/ą▓čŗą║ą╗čÄčćąĖčéčī ą┐ąŠą┤čüą▓ąĄčéą║čā 菹║čĆą░ąĮčćąĖą║ą░ Nokia 5110. ąś čéą░ą║... ąÜąŠčĆą░ą▒ą╗ąĖą║ čā ąĮą░čü ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖčæą╝ą░. ąÜąŠčĆą░ą▒ą╗ąĖą║ (ą╝ąŠą┤čāą╗čī W5500) ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą▓čüąĄ ąĘą░ą┐čĆąŠčüčŗ (SYN) ąĮą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą┐ąŠ ą╗ąŠą║ą░ą╗čīąĮąŠą╣ čüąĄčéąĖ ąĮą░ IP ą░ą┤čĆąĄčü 192.168.0.2, ą┐ąŠčĆčé 80 ąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ą▓čüąĄą╝ ą▓ ąŠčéą▓ąĄčé ą┐čĆąĖą▓ąĄčéčüčéą▓ąĖąĄ (ą¤čĆąĖą▓ąĄčé ąŠčé ą║ąŠčĆą░ą▒ą╗ąĖą║ą░!)...)) ą¤ąŠčüą╗ąĄ č湥ą│ąŠ ą║ąŠčĆą░ą▒ą╗ąĖą║ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĘą░ą║čĆčŗą▓ą░ąĄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ (FIN) ąĖ ąČą┤čæčé ąĮąŠą▓ąŠą│ąŠ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ... ą¦č鹊ą▒čŗ ą▓ą║ą╗čÄčćąĖčéčī/ą▓čŗą║ą╗čÄčćąĖčéčī ą┐ąŠą┤čüą▓ąĄčéą║čā 菹║čĆą░ąĮčćąĖą║ą░, ąĮčāąČąĮąŠ ąŠčéą┐čĆą░ą▓ąĖčéčī ą║ąŠčĆą░ą▒ą╗ąĖą║čā GET ąĘą░ą┐čĆąŠčü, ą▓ ą║ąŠč鹊čĆąŠą╝ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čāą║ą░ąĘą░čéčī čćč鹊 ą╝čŗ čģąŠčéąĖą╝..)) ąØą░ą┐čĆąĖą╝ąĄčĆ ą┤ą╗čÅ č鹊ą│ąŠ čćč鹊-ą▒čŗ ą┐čĆąŠčüč鹊 ą▓ą║ą╗čÄčćąĖčéčī ą┐ąŠą┤čüą▓ąĄčéą║čā 菹║čĆą░ąĮčćąĖą║ą░ ąŠčéą┐čĆą░ą▓ąĖą╝ čāčüą╗ąŠą▓ąĮčŗą╣ ąĘą░ą┐čĆąŠčü... ąĮą░ą┐čĆąĖą╝ąĄčĆ čåąĖčäčĆčā "1". ąÉ čćč鹊-ą▒čŗ ą▓čŗą║ą╗čÄčćąĖčéčī ą┐ąŠą┤čüą▓ąĄčéą║čā ąŠčéą┐čĆą░ą▓ąĖą╝ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ čåąĖčäčĆčā "0"... ą┐ąŠ-ą╝ąŠąĄą╝čā ą╗ąŠą│ąĖčćąĮąŠ)) ą¦č鹊ą▒čŗ ąŠčéą┐čĆą░ą▓ąĖčéčī GET ąĘą░ą┐čĆąŠčü ą║ąŠčĆą░ą▒ą╗ąĖą║čā čü čåąĖčäčĆąŠą╣ "1" ą┤ąŠčüčéą░č鹊čćąĮąŠ ą┐čĆąŠčüč鹊 ą▓ ą░ą┤čĆąĄčüąĮąŠą╣ čüčéčĆąŠą║ąĄ ą▒čĆą░čāąĘąĄčĆą░ ąĮą░ą┐ąĖčüą░čéčī čåąĖčäčĆčā "1"... ą╗ąŠą│ąĖčćąĮąŠ)) ą¤čĆąŠą▓ąĄčĆčÅąĄą╝: ąÆą╗ąŠąČąĄąĮąĖąĄ:
ą▓ą║ą╗ ą┐ąŠą┤čüą▓ąĄčéą║ą░.jpg [184.44 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 673
ąĀą░ą▒ąŠčéą░ąĄčé..)) -ąÜąŠčĆą░ą▒ą╗ąĖą║ ą┐čĆąĖąĮčÅą╗ GET ąĘą░ą┐čĆąŠčü čü čåąĖčäčĆąŠą╣ "1" (čåąĖčäčĆą░ "1" ą▓ čłąĄčüčéąĮą░ą┤čåą░čéąĖčĆąĖčćąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ - 0x31, čüąŠą│ą╗ą░čüąĮąŠ čéą░ą▒ą╗ąĖčåąĄ ASCII). -ąÜąŠčĆą░ą▒ą╗ąĖą║ čāą▓ąĖą┤ąĄą╗ ą▓ GET ąĘą░ą┐čĆąŠčüąĄ čåąĖčäčĆčā "1" ąĖ ą▓ą║ą╗čÄčćąĖą╗ ą┐ąŠą┤čüą▓ąĄčéą║čā 菹║čĆą░ąĮčćąĖą║ą░ Nokia 5110. ąóąĄą┐ąĄčĆčī ą▓čŗą║ą╗čÄčćąĖą╝ ą┐ąŠą┤čüą▓ąĄčéą║čā. ą¤ąĖčłąĄą╝ ą▓ ą░ą┤čĆąĄčüąĮąŠą╣ čüčéčĆąŠą║ąĄ ą▒čĆą░čāąĘąĄčĆą░ čåąĖčäčĆčā "0". ąÆą╗ąŠąČąĄąĮąĖąĄ:
ą▓čŗą║ą╗ ą┐ąŠą┤čüą▓ąĄčéą║ą░.jpg [180.3 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 595
ąĀą░ą▒ąŠčéą░ąĄčé..)) -ąÜąŠčĆą░ą▒ą╗ąĖą║ ą┐čĆąĖąĮčÅą╗ GET ąĘą░ą┐čĆąŠčü čü čåąĖčäčĆąŠą╣ "0" (čåąĖčäčĆą░ "0" ą▓ čłąĄčüčéąĮą░ą┤čåą░čéąĖčĆąĖčćąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ - 0x30, čüąŠą│ą╗ą░čüąĮąŠ čéą░ą▒ą╗ąĖčåąĄ ASCII). -ąÜąŠčĆą░ą▒ą╗ąĖą║ čāą▓ąĖą┤ąĄą╗ ą▓ GET ąĘą░ą┐čĆąŠčüąĄ čåąĖčäčĆčā "0" ąĖ ą▓čŗą║ą╗čÄčćąĖą╗ ą┐ąŠą┤čüą▓ąĄčéą║čā 菹║čĆą░ąĮčćąĖą║ą░ Nokia 5110. ą£ą┤čÅ... ---------- ąÆ ą┐čĆąĖąĮčåąĖą┐ąĄ čĆą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą║ąŠčĆą░ą▒ą╗ąĖą║ąŠą╝ ą┐ąŠ Wi-Fi čā ąĮą░čü čāąČąĄ ą│ąŠč鹊ą▓ąŠ)) ąöąŠčüčéą░č鹊čćąĮąŠ ą┐čĆąŠčüč鹊 ą┐ąŠčüčéą░ą▓ąĖčéčī ą▓ ąĮą░čł ą║ąŠčĆą░ą▒ą╗ąĖą║ čüčéą░čĆąĄąĮčīą║ąĖą╣ Wi-Fi čĆąŠčāč鹥čĆ (ą║ąŠč鹊čĆčŗą╣ ąĮąĄ ąČą░ą╗ą║ąŠ ąĄčüą╗ąĖ čāč鹊ąĮąĄčé ), ą║ą░ą║ čŹč鹊 čüą┤ąĄą╗ą░ą╗ąĖ čéčāčé - http://cxem.net/uprav/uprav34.phpąÆą╗ąŠąČąĄąĮąĖąĄ:
ą╝ą░čłąĖąĮą║ą░.jpg [65.51 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 784
ąĖ ą╝ąŠąČąĮąŠ ąŠčéą┐čĆą░ą▓ą╗čÅčéčīčüčÅ ą▓ ą┐čāčéčī)) ąŻą┐čĆą░ą▓ą╗čÅčéčī ą▒čāą┤ąĄą╝ ąĖąĘ ą▒čĆą░čāąĘąĄčĆą░ čüčéčĆąŠą║ąĖ ą╗čÄą▒ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ čü Wi-Fi... ąĮąŠčāčéą▒čāą║ą░, ą┐ą╗ą░ąĮčłąĄčéą░ ąĖ čé.ą┤.)) ąóąŠą╗čīą║ąŠ ą┤ąŠą▒ą░ą▓ąĖą╝ ą║ąŠą╝ą░ąĮą┤čŗ... "ą▓ą┐ąĄčĆčæą┤", "ąĮą░ąĘą░ą┤", "ą╗ąĄą▓ąŠ", "ą┐čĆą░ą▓ąŠ"... ąĖ čé.ą┤. )) ---------- ąÆčüčæ čŹč鹊 ąĖąĮč鹥čĆąĄčüąĮąŠ, ąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī ąĖąĘ čüčéčĆąŠą║ąĖ ą▒čĆą░čāąĘąĄčĆą░ ąĮąĄčāą┤ąŠą▒ąĮąŠ...)) ąóąŠą│ą┤ą░ čüą┤ąĄą╗ą░ą╝ ą┐ąŠčüą╗ąŠąČąĮąĄą╣... ą¤ąĖčłąĄą╝ ążąŠčĆą╝čŗHTML ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čüąŠąĘą┤ą░ą▓ą░čéčī č乊čĆą╝čŗ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ąĮą░ čüąĄčĆą▓ąĄčĆ. http://htmlbook.ru/samhtml/vvedenie-v-htmląöąŠą▒ą░ą▓ąĖą╝ ą┐ą░čĆčā ą║ąĮąŠą┐ąŠą║ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠą┤čüą▓ąĄčéą║ąŠą╣ Nokia 5110. ąöą╗čÅ čŹč鹊ą│ąŠ ąĘą░ą┐ąĖčłąĄą╝ ą▓ ą║ąŠčĆą░ą▒ą╗ąĖą║ ą┐čĆąŠčüč鹥ąĮčīą║ąĖą╣ ą║ąŠą┤ ą║ąĮąŠą┐ąŠą║ (ą┐čĆąŠčüč鹥ąĮčīą║čāčÄ č乊čĆą╝čā). ąÆą╗ąŠąČąĄąĮąĖąĄ:
ą║ąŠą┤ ą║ąĮąŠą┐ąŠą║.rar [285 ą▒ą░ą╣čé]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 234
ąóąĄą┐ąĄčĆčī čĆą░ąĘą▒ąĄčĆčæą╝ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ą║ą░ą║ čŹč鹊 ą▓čüčæ čĆą░ą▒ąŠčéą░ąĄčé..)) ąĪą╝ąŠčéčĆąĖą╝ ą░ąĮą░ą╗ąĖąĘą░č鹊čĆ čéčĆą░čäąĖą║ą░ (ąĖ ą┐ąŠą║ą░ąĘą░ąĮąĖčÅ čŹą║čĆą░ąĮčćąĖą║ą░ ą║ąŠčĆą░ą▒ą╗ąĖą║ą░ Nokia 5110): 1- ą¤ąĖčłąĄą╝ ą▓ ą░ą┤čĆąĄčüąĮąŠą╣ čüčéčĆąŠą║ąĄ ą▒čĆą░čāąĘąĄčĆą░ IP ą░ą┤čĆąĄčü ąĮą░čłąĄą│ąŠ ą║ąŠčĆą░ą▒ą╗ąĖą║ą░. ąæčĆą░čāąĘąĄčĆ ąŠčéą┐čĆą░ą▓ąĖą╗ "ą┐čāčüč鹊ą╣" GET ąĘą░ą┐čĆąŠčü ą║ąŠčĆą░ą▒ą╗ąĖą║čā: ąÆą╗ąŠąČąĄąĮąĖąĄ:
1_1.jpg [106.35 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 630
2- ąÜąŠčĆą░ą▒ą╗ąĖą║ ą┐čĆąŠą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░ą╗ "ą┐čāčüč鹊ą╣" GET ąĖ ąŠčéą┐čĆą░ą▓ąĖą╗ ą▒čĆą░čāąĘąĄčĆčā čüčéčĆą░ąĮąĖčćą║čā (č乊čĆą╝čā). ąæčĆą░čāąĘąĄčĆ ą┐čĆąĖąĮčÅą╗ čüčéčĆą░ąĮąĖčćą║čā (č乊čĆą╝čā) ąĖ ąĮą░čĆąĖčüąŠą▓ą░ą╗ ą┤ą▓ąĄ ą║ąĮąŠą┐ą║ąĖ ( ON ąĖ OFF): ąÆą╗ąŠąČąĄąĮąĖąĄ:
2_1.jpg [159.42 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 272
3- ąóąĄą┐ąĄčĆčī ąĮą░ąČąĖą╝ą░ąĄą╝ ą║ąĮąŠą┐ą║čā ON. ą¤čĆąĖ ąĮą░ąČą░čéąĖąĖ ą║ąĮąŠą┐ą║ąĖ ON ą▒čĆą░čāąĘąĄčĆ ąŠčéą┐čĆą░ą▓ąĖą╗ GET ąĘą░ą┐čĆąŠčü ą║ąŠčĆą░ą▒ą╗ąĖą║čā, čü čāą║ą░ąĘą░ąĮąĖąĄą╝ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĘą░ą┐čĆąŠčüą░ (? - ąĮą░čćą░ą╗ąŠ ąĘą░ą┐čĆąŠčüą░, LED - ą┐ąŠą┤čüą▓ąĄčéą║ą░ 菹║čĆą░ąĮčćąĖą║ą░, 1 - ą▓ą║ą╗čÄčćąĖčéčī ą┐ąŠą┤čüą▓ąĄčéą║čā). ąÜąŠčĆą░ą▒ą╗ąĖą║ ą┐čĆąĖąĮčÅą╗ GET ąĘą░ą┐čĆąŠčü, ą┐čĆąŠą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░ą╗ ąĖ ą▓ą║ą╗čÄčćąĖą╗ ą┐ąŠą┤čüą▓ąĄčéą║čā 菹║čĆą░ąĮąĖčćąĖą║ą░: ąÆą╗ąŠąČąĄąĮąĖąĄ:
3_1.jpg [114.86 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 573
4- ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą║ąŠčĆą░ą▒ą╗ąĖą║ ąŠčéą┐čĆą░ą▓ąĖą╗ čüčéčĆą░ąĮąĖčćą║čā (č乊čĆą╝čā) ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąŠą┤čüą▓ąĄčéą║ąĖ 菹║čĆą░ąĮčćąĖą║ą░. ąæčĆą░čāąĘąĄčĆ ą┐čĆąĖąĮčÅą╗ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ: ąÆą╗ąŠąČąĄąĮąĖąĄ:
4_1.jpg [135.47 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 283
5- ąóąĄą┐ąĄčĆčī ąĮą░ąČąĖą╝ą░ąĄą╝ ą║ąĮąŠą┐ą║čā OFF. ą¤čĆąĖ ąĮą░ąČą░čéąĖąĖ ą║ąĮąŠą┐ą║ąĖ OFF ą▒čĆą░čāąĘąĄčĆ ąŠčéą┐čĆą░ą▓ąĖą╗ GET ąĘą░ą┐čĆąŠčü ą║ąŠčĆą░ą▒ą╗ąĖą║čā, čü čāą║ą░ąĘą░ąĮąĖąĄą╝ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĘą░ą┐čĆąŠčüą░ (? - ąĮą░čćą░ą╗ąŠ ąĘą░ą┐čĆąŠčüą░, LED - ą┐ąŠą┤čüą▓ąĄčéą║ą░ 菹║čĆą░ąĮčćąĖą║ą░, 0 - ą▓čŗą║ą╗čÄčćąĖčéčī ą┐ąŠą┤čüą▓ąĄčéą║čā). ąÜąŠčĆą░ą▒ą╗ąĖą║ ą┐čĆąĖąĮčÅą╗ GET ąĘą░ą┐čĆąŠčü, ą┐čĆąŠą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░ą╗ ąĖ ą▓čŗą║ą╗čÄčćąĖą╗ ą┐ąŠą┤čüą▓ąĄčéą║čā 菹║čĆą░ąĮąĖčćąĖą║ą░: ąÆą╗ąŠąČąĄąĮąĖąĄ:
5_1.jpg [123.66 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 292
6- ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą║ąŠčĆą░ą▒ą╗ąĖą║ ąŠčéą┐čĆą░ą▓ąĖą╗ čüčéčĆą░ąĮąĖčćą║čā (č乊čĆą╝čā) ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ ą┐ąŠą┤čüą▓ąĄčéą║ąĖ 菹║čĆą░ąĮčćąĖą║ą░. ąæčĆą░čāąĘąĄčĆ ą┐čĆąĖąĮčÅą╗ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ: ąÆą╗ąŠąČąĄąĮąĖąĄ:
6_1.jpg [159.69 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 285
ąÆčüčæ..)) ąÆąŠčé čéą░ą║ ą▓čüčæ ą┐čĆąŠčüč鹊 čĆą░ą▒ąŠčéą░ąĄčé..)) ---------- HTML ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čüąŠąĘą┤ą░ą▓ą░čéčī ą║čāčćčā ą▓čüąĄą│ąŠ... ą║ąĮąŠą┐ą║ąĖ, ą┐ąĄčĆąĄą║ą╗čÄčćą░č鹥ą╗ąĖ, ą┐ąŠą╗ąĘčāąĮą║ąĖ, ąĘą░ą│čĆčāąČą░čéčī ą║ą░čĆčéąĖąĮą║ąĖ, čüčüčŗą╗ą║ąĖ... ąĖ čé.ą┤. ąĖ čé.ą┐. )) ąÆą╗ąŠąČąĄąĮąĖąĄ:
ą┐čāą╗čīčé.jpg [128.02 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 634
ąŁč鹊 čāąČąĄ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ ąÆąĄą▒-ą┤ąĖąĘą░ą╣ąĮ... ))
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
roman.com
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą║ąŠčĆą░ą▒ą╗ąĖą║ čüą▓ąŠąĖą╝ąĖ čĆčāą║ą░ą╝ąĖ. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čüąĄąĮ 12, 2018 23:57:34 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 13, 2012 12:16:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6882
ą×čéą║čāą┤ą░: .ru
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: -3
|
ąöą░ą╗ąĄąĄ... ą¤ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ čā ą╝ąŠą┤čāą╗čÅ 5500 ą┤ąŠą▓ąŠą╗čīąĮąŠ ą▒ąŠą╗čīčłąŠąĄ... ~140 mA ąĮą░ čüą║ąŠčĆąŠčüčéąĖ 100 ą£ą▒ąĖčé/c ~80 mA ąĮą░ čüą║ąŠčĆąŠčüčéąĖ 10 ą£ą▒ąĖčé/c ... ąÆčŗą▒ąĖčĆą░ąĄą╝ ą┐ąŠąĮąĖąČąĄąĮąĮčāčÄ čüą║ąŠčĆąŠčüčéčī... ą¤čĆą░ą▓ą┤ą░ čÅ čéą░ą║ ąĖ ąĮąĄ ą┐ąŠąĮčÅą╗, ą║ą░ą║ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ą╝ąŠą┤čāą╗čī ąĮą░ ą┐ąŠąĮąĖąČąĄąĮąĮčāčÄ čüą║ąŠčĆąŠčüčéčī... ąĀąĄą│ąĖčüčéčĆ ąĮą░čüčéčĆąŠą╣ą║ąĖ PHY ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé - ąĄčüą╗ąĖ ąĘą░ą┐ąĖčüą░čéčī ą┤čĆčāą│ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ (ąŠčéą╗ąĖčćąĮąŠąĄ ąŠčé ąĘą░ą▓ąŠą┤čüą║ąĖčģ), ą╝ąŠčāą┤čāą╗čī W5500 ą┐čĆąŠčüč鹊 ąŠčéą║ą╗čÄčćą░ąĄčé ą▓ąĄčüčī ą▒ą╗ąŠą║ PHY... ą£ąŠąČąĄčé ą║č鹊 ąĘąĮą░ąĄčé ą▓ čćčæą╝ ą┐čĆąŠą▒ą╗ąĄą╝ą░? ą¤ąŠą║ą░ ą┐čĆąŠčüč鹊 ąĘą░ą╝ą║ąĮčāą╗ ą▓čŗą▓ąŠą┤čŗ TD- ąĖ RX-, čćč鹊ą▒čŗ W5500 ąĮąĄ ą╝ąŠą│ čĆą░ą▒ąŠčéą░čéčī ąĮą░ 100 ą£ą▒ąĖčé/c... ąÆą╗ąŠąČąĄąĮąĖąĄ:
w5500_čüčģąĄą╝ą░.png [92.76 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 594
ą¤ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ W5500 ąĮąĄą╝ąĮąŠą│ąŠ ą┐ąŠą┤čāą╝ą░ą▓... ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ 10 ą£ą▒ąĖčé/c... ąÉą▓č鹊ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čā W5500 čĆą░ą▒ąŠčéą░ąĄčé čćčæčéą║ąŠ.. )) https://en.wikipedia.org/wiki/Autonegotiation
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
diplodok
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą║ąŠčĆą░ą▒ą╗ąĖą║ čüą▓ąŠąĖą╝ąĖ čĆčāą║ą░ą╝ąĖ. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé čüąĄąĮ 13, 2018 12:51:49 |
|
| ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖą╣ ą║ąŠčé |
ąÜą░čĆą╝ą░: 6
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 155
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą░ą▓ą│ 10, 2017 20:57:51
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1003
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
roman.com ą┐ąĖčüą░ą╗(ą░): ą¤ąŠą║ą░ ą┐čĆąŠčüč鹊 ąĘą░ą╝ą║ąĮčāą╗ ą▓čŗą▓ąŠą┤čŗ TD- ąĖ RX-, čćč鹊ą▒čŗ W5500 ąĮąĄ ą╝ąŠą│ čĆą░ą▒ąŠčéą░čéčī ąĮą░ 100 ą£ą▒ąĖčé/c...  ąĢčüą╗ąĖ ąÆą░ą╝ ą╗ąĄąĮčī ą┐čĆąŠčćąĖčéą░čéčī ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ č鹊, čģąŠčéčÅ, ą┐ąŠčüą╝ąŠčéčĆąĖč鹥 ąĮą░ čüą▓ąŠčÄ čüčģąĄą╝čā - čü ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ąÆą░čłąĄą│ąŠ ą┐ąŠčüčéą░.  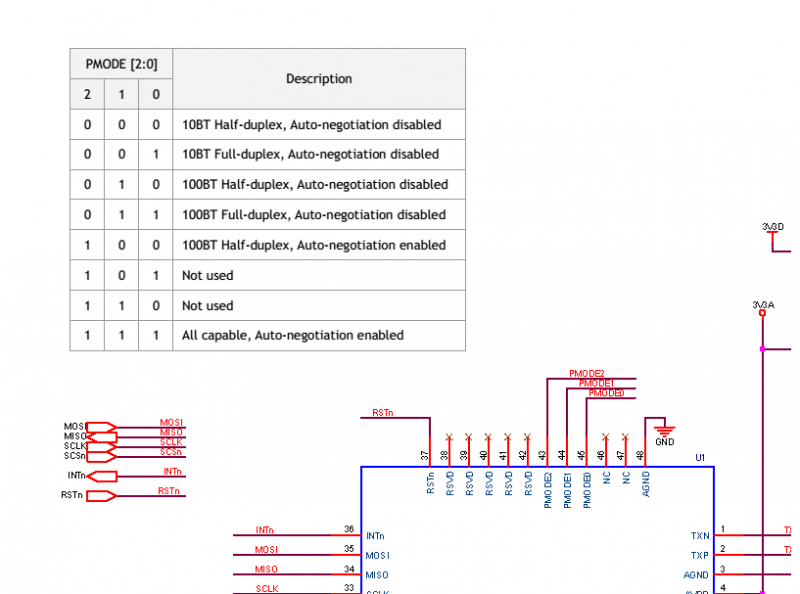
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
roman.com
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą║ąŠčĆą░ą▒ą╗ąĖą║ čüą▓ąŠąĖą╝ąĖ čĆčāą║ą░ą╝ąĖ. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé čüąĄąĮ 13, 2018 13:32:56 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 13, 2012 12:16:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6882
ą×čéą║čāą┤ą░: .ru
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąÆčŗ ą▓ąŠąŠą▒čēąĄ ąĮąĄ čćąĖčéą░ąĄč鹥 ą▓ąŠą┐čĆąŠčüąŠą▓? ą¤ąŠą▓č鹊čĆčÅčÄ - ą║ą░ą║ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ą╝ąŠą┤čāą╗čī ąĮą░ ą┐ąŠąĮąĖąČąĄąĮąĮčāčÄ čüą║ąŠčĆąŠčüčéčī ? ą£ąĮąĄ ąĮąĄ ą╗ąĄąĮčī čćąĖčéą░čéčī ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ: ąÆą╗ąŠąČąĄąĮąĖąĄ:
ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ.jpg [200.5 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 560
ąöą╗čÅ ąĮąĄą┐ąŠąĮčÅčéą╗ąĖą▓čŗčģ ą┐ąĄčĆąĄą▓ąŠąČčā: ą”ąĖčéą░čéą░ ąĖąĘ ą┤ą░čéą░čłąĖčéą░ W5500: "ąØą░čüčéčĆąŠą╣ą║ą░ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ PHY: ąÉą┐ą┐ą░čĆą░čéąĮą░čÅ ąĮą░čüčéčĆąŠą╣ą║ą░ čü ą┐ąŠą╝ąŠčēčīčÄ ą▓čŗą▓ąŠą┤ąŠą▓ PMODE [2: 0] ąĮą░ čüčģąĄą╝ąĄ. ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąĮą░čüčéčĆąŠą╣ą║ą░ čü ą┐ąŠą╝ąŠčēčīčÄ čĆąĄą│ąĖčüčéčĆą░ OPMDC [2: 0]..." ąÜąŠąĮąĄčå čåąĖčéą░čéčŗ. ą» čģąŠčćčā ąĮą░čüčéčĆąŠąĖčéčī PHY ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ. ąØąŠ ą┐ąŠčģąŠąČąĄ čŹčéą░ čäčāąĮą║čåąĖčÅ ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé...
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
diplodok
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą║ąŠčĆą░ą▒ą╗ąĖą║ čüą▓ąŠąĖą╝ąĖ čĆčāą║ą░ą╝ąĖ. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé čüąĄąĮ 13, 2018 15:02:58 |
|
| ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖą╣ ą║ąŠčé |
ąÜą░čĆą╝ą░: 6
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 155
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą░ą▓ą│ 10, 2017 20:57:51
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1003
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąØąĖą║č鹊 ą║čĆąŠą╝ąĄ ąÆą░čü ąĮąĄ ąĘąĮą░ąĄčé čćč鹊 ąÆčŗ čéą░ą╝ ą┤ąĄą╗ą░ąĄč鹥 ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ. ą¤ąŠ ą╝ąŠąĄą╝čā ąŠč湥ąĮčī čģąŠčĆąŠčłąŠ čĆą░ąĘą┐ąĖčüą░ąĮąŠ čćč鹊 ąĖ ą║ą░ą║ ąĮą░ą┤ąŠ .....
ąöą░ ąĖ ą║ąŠą╝čā ąĮčāąČąĮąŠ čéą░ą║ąŠąĄ ąĖąĘą▓čĆą░čēąĄąĮąĖąĄ?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
roman.com
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą║ąŠčĆą░ą▒ą╗ąĖą║ čüą▓ąŠąĖą╝ąĖ čĆčāą║ą░ą╝ąĖ. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé čüąĄąĮ 13, 2018 16:38:50 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ą╝ą░čĆ 13, 2012 12:16:13
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6882
ą×čéą║čāą┤ą░: .ru
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąŻąČąĄ čüą░ą╝ čĆą░ąĘąŠą▒čĆą░ą╗čüčÅ. ążčāąĮą║čåąĖčÅ čĆą░ą▒ąŠčéą░ąĄčé. ą¤čĆąŠčüč鹊 ą┐ąĄčĆąĄą┤ ąĮą░čüčéčĆąŠą╣ą║ąŠą╣ PHY ąĘą░ą▒čŗą╗ čüą┤ąĄą╗ą░čéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüą▒čĆąŠčü PHY... ąóąŠą│ą┤ą░ ą▓čüčæ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ąĮą░ą┤ąŠ)) ąÉ č鹊 čéčāčé čāąČąĄ ą┐čĆąĄą┤ą╗ąŠąČąĖą╗ąĖ ą▒ąĄąČą░čéčī ąĘą░ ą┐ą░čÅą╗čīąĮąĖą║ąŠą╝... ąĖ ą┐ąĄčĆąĄą┐ą░ąĖą▓ą░čéčī ą▓čŗą▓ąŠą┤čŗ ąĮą░ ą┐ą╗ą░č鹥... ąĀą░ąĘą▓ąĄą╗ąŠčüčī čüąŠą▓ąĄčéčćąĖą║ąŠą▓... ą▒ą╗ąĖąĮ..))
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
diplodok
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĀą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą║ąŠčĆą░ą▒ą╗ąĖą║ čüą▓ąŠąĖą╝ąĖ čĆčāą║ą░ą╝ąĖ. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé čüąĄąĮ 13, 2018 17:02:10 |
|
| ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖą╣ ą║ąŠčé |
ąÜą░čĆą╝ą░: 6
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 155
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą░ą▓ą│ 10, 2017 20:57:51
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1003
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą» ąÆą░ą╝ čüąŠą▓ąĄč鹊ą▓ą░ą╗ čćąĖčéą░čéčī ąĖ ą▓ąĮąĖą║ą░čéčī ą▓ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ. ąś ą║ą░ą║ ąŠą║ą░ąĘą░ą╗ąŠčüčī - čéą░ą╝ ą▓čüąĄ čĆą░ąĘą┐ąĖčüą░ąĮąŠ ....... ąÉ ąĮąĄ roman.com ą┐ąĖčüą░ą╗(ą░): ąĘą░ą╝ą║ąĮčāą╗ ą▓čŗą▓ąŠą┤čŗ TD- ąĖ RX- ąÉ č鹊 čüčĆą░ąĘčā - ą¤ąŠą╝ąŠą│ąĖč鹥-ąĄ-ąĄ-ąĄ. ąØąĄ čĆą░ą▒ąŠčéą░ąĄčé! ą×čłąĖą▒ą║ą░ ą▓ čćąĖą┐ąĄ ...... ąĖ čé.ą┤. ąĖ čé.ą┐. ąÉ ą▓čüčæ ąŠą║ą░ąĘą░ą╗ąŠčüčī ......
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
|
ąĪčéčĆą░ąĮąĖčåą░ 23 ąĖąĘ 108
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2145 ] |
... , , , , , , ... |
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ |
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: 1mom ąĖ ą│ąŠčüčéąĖ: 38 |
|
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ
|

|
|










