|
ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - ąĪą╗ąŠąČąĮčŗą╣ ą▓ąŠą┐čĆąŠčü AVR ąĮą░ ąĪ ą┐čĆąŠ volatile to const
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
 
|
ąĪčéčĆą░ąĮąĖčåą░ 4 ąĖąĘ 4
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 75 ] |
, , , |
| ąÉą▓č鹊čĆ |
ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
Dimon456

|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĪą╗ąŠąČąĮčŗą╣ ą▓ąŠą┐čĆąŠčü AVR ąĮą░ ąĪ ą┐čĆąŠ volatile to const  ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░ą╣ 09, 2019 16:57:24 |
|
ąÜą░čĆą╝ą░: 20
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 145
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą┤ąĄą║ 25, 2016 08:34:54
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1849
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
alex68md ą┐ąĖčüą░ą╗(ą░): ąĮčā čéą░ą║ čŹč鹊 ą┐ąŠ čüčāčéąĖ č鹊ąČąĄ čüą░ą╝ąŠąĄ ą║ č湥ą╝čā čÅ ą┐čĆąĖčłąĄą╗ ą▓čŗčłąĄ. ą┐čĆąŠčüč鹊 ą┐ąĄčĆąĄą┤ą░čÄ ąĘąĮą░č湥ąĮąĖčÅ ą▓ čäčāąĮą║čåąĖčÄ ą░ ą▓čŗ č湥čĆąĄąĘ ą╝ą░ą║čĆąŠčü. ąØąĄčé, ąĮąĄ ąŠą┤ąĮąŠ ąĖ č鹊 ąČąĄ. ąÆ čüą╗čāčćą░ąĄ ARV ą╝ą░ą║čĆąŠčü ą┐čĆąĖą▓čÅąĘą░ąĮ ą║ ą║ąŠąĮą║čĆąĄčéąĮąŠą╝čā ąĘąĮą░č湥ąĮąĖčÄ ą┐ąŠčĆčéą░ ąĖą╗ąĖ const, ąŠąĮąŠ ąĮąĄąĖąĘą╝ąĄąĮąĮąŠ ąĮą░ ą┐čĆąŠčéčÅąČąĄąĮąĖąĖ ą▓čüąĄą╣ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ąÜ ą┐čĆąĖą╝ąĄčĆčā čéą░ą║ ąÜąŠą┤: #define SENSOR_PORT PIND
#define SENSOR_MASK (1<<5)
while((SENSOR_PORT & SENSOR_MASK) != SENSOR_VAL) ąś čŹč鹊 ą▓čŗčĆą░ąČąĄąĮąĖąĄ čüą┐čĆą░ą▓ąĄą┤ą╗ąĖą▓ąŠ č鹊ą╗čīą║ąŠ ą┐čĆąĖ ąŠą┤ąĮąŠą╝ ąĘąĮą░č湥ąĮąĖąĖ SENSOR_VAL. ąøąĖą▒ąŠ čéą░ą║ ąÜąŠą┤: while((SENSOR_PORT & SENSOR_MASK) != 0) ą╗ąĖą▒ąŠ 菹┤ą░ą║ ąÜąŠą┤: while((SENSOR_PORT & SENSOR_MASK) == 0) ą”ąĄą╗ąĄčüąŠąŠą▒čĆą░ąĘąĮąĄąĄ ą▒čŗą╗ąŠ ą▒čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čéą░ą║čāčÄ ąĘą░ą┐ąĖčüčī ąÜąŠą┤: while((SENSOR_PORT & SENSOR_MASK) != SENSOR_MASK)
while((SENSOR_PORT & SENSOR_MASK) == SENSOR_MASK) ą╗ąĖą▒ąŠ čéą░ą║ ąÜąŠą┤: while((SENSOR_PORT & SENSOR_MASK))
while(!(SENSOR_PORT & SENSOR_MASK)) ąÆčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ąÜąŠą┤: void soft_reset(const uint8_t wdt_prescale, const volatile uint8_t *port, const uint8_t pin, const uint8_t level) , č鹊 ąĄčüčéčī čģąŠčéąĖč鹥 ą║ąŠąĮčéčĆąŠą╗ąĖčĆąŠą▓ą░čéčī ą▒ąŠą╗ąĄąĄ ąŠą┤ąĮąŠą│ąŠ ą┐ąŠčĆčéą░, ą╝ąŠąČąĄčé ą┤ą▓ą░ ą╝ąŠąČąĄčé čéčĆąĖ, ąĖ ą║čāčćčā ą┐ąĖąĮąŠą▓. ąĢčüą╗ąĖ čŹč鹊 čéą░ą║, č鹊 čŹč鹊 ąÜąŠą┤: while ((*port & pin) ^ level); ą▓čŗčĆą░ąČąĄąĮąĖąĄ čüą┐čĆą░ą▓ąĄą┤ą╗ąĖą▓ąŠ č鹊ą╗čīą║ąŠ ą┐čĆąĖ pin = 0, čüą║ąŠą╗čīą║ąŠ ą╝ąŠąČąĮąŠ ąŠą▒ čŹč鹊ą╝ ą┐ąĖčüą░čéčī. ą¤ąĄčĆąĄą┐ąĖčłąĖč鹥 čéą░ą║ ąÜąŠą┤: void soft_reset(const uint8_t wdt_prescale, volatile uint8_t *port, const uint8_t pin, const uint8_t level){
wdt_enable(wdt_prescale);
if (port == NULL) while (1);
if (level) {
while(!(*port&(1 << pin))); //
} else {
while((*port&(1 << pin))); //
}
wdt_disable();
}
ąś ą┤ą░, ąÜąŠą┤: if (port == NULL) while (1); ą▓čŗ ąĘą░ č湥ą╝ ą░ą┤čĆąĄčü ą┐ąŠčĆčéą░ čüčĆą░ą▓ąĮąĖą▓ą░ąĄč鹥 čü NULL? ą¦ąĄą╝čā ą┐ąŠ ą▓ą░čłąĄą╝čā ą╝ąĮąĄąĮąĖčÄ ą▒čāą┤ąĄčé čĆą░ą▓ąĄąĮ NULL?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
 |
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
alex68md
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĪą╗ąŠąČąĮčŗą╣ ą▓ąŠą┐čĆąŠčü AVR ąĮą░ ąĪ ą┐čĆąŠ volatile to const ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░ą╣ 09, 2019 17:28:42 |
|
| ąōčĆčŗąĘąĄčé ą║ą░ąĮąĖč乊ą╗čī |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ čÅąĮą▓ 03, 2015 21:03:24
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 266
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąÆ čüą╗čāčćą░ąĄ ARV ą╝ą░ą║čĆąŠčü ą┐čĆąĖą▓čÅąĘą░ąĮ ą║ ą║ąŠąĮą║čĆąĄčéąĮąŠą╝čā ąĘąĮą░č湥ąĮąĖčÄ ą┐ąŠčĆčéą░ ąĖą╗ąĖ const, ąŠąĮąŠ ąĮąĄąĖąĘą╝ąĄąĮąĮąŠ ąĮą░ ą┐čĆąŠčéčÅąČąĄąĮąĖąĖ ą▓čüąĄą╣ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ąĮčā čéą░ą║ ąĖ čā ą╝ąĄąĮčÅ ą▓čŗąĘąŠą▓ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé č湥čĆąĄąĘ ą╝ą░ą║čĆąŠčüčŗ. ARV ąĘą░ą┐ąĖčģąĮčāą╗ ąĖčģ ą▓ while čÅ ą▓ call  ą▓čĆąŠą┤ąĄ ąĮą░ ą╝ąŠą╣ ąĮąĄą┐čĆąŠč乥čüčüąĖąŠąĮą░ą╗čīąĮčŗą╣ ą▓ąĘą│ą╗čÅą┤ ąŠą┤ąĮąŠ ąĖ č鹊ąČąĄ (ąĮčā ą┐ąŠčćčéąĖ) ą”ąĖčéą░čéą░: while ((*port & pin) ^ level);
ą▓čŗčĆą░ąČąĄąĮąĖąĄ čüą┐čĆą░ą▓ąĄą┤ą╗ąĖą▓ąŠ č鹊ą╗čīą║ąŠ ą┐čĆąĖ pin = 0, čüą║ąŠą╗čīą║ąŠ ą╝ąŠąČąĮąŠ ąŠą▒ čŹč鹊ą╝ ą┐ąĖčüą░čéčī. ą┐ąŠč湥ą╝čā? ą▓čĆąŠą┤ąĄ ąŠąĮąŠ čā ą╝ąĄąĮčÅ čĆą░ą▒ąŠčéą░ąĄčé ą┤ą╗čÅ ąŠą▒ąŠąĖčģ čüąŠčüč鹊čÅąĮąĖą╣ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 3 minutes 36 seconds:ą”ąĖčéą░čéą░: ą▓čŗ ąĘą░ č湥ą╝ ą░ą┤čĆąĄčü ą┐ąŠčĆčéą░ čüčĆą░ą▓ąĮąĖą▓ą░ąĄč鹥 čü NULL? ą¦ąĄą╝čā ą┐ąŠ ą▓ą░čłąĄą╝čā ą╝ąĮąĄąĮąĖčÄ ą▒čāą┤ąĄčé čĆą░ą▓ąĄąĮ NULL? ąĖąĮąŠą│ą┤ą░ čā ą╝ąĄąĮčÅ ą░ą┤čĆąĄčü ą▒čāą┤ąĄčé NULL . ąĮąĄ ą┐ąŠąĮčÅą╗ ą┐ąŠč湥ą╝čā čŹč鹊 ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠ ? ąĮčā čüąŠą│ą╗ą░čüąĄąĮ ą╝ąŠąČąĮąŠ čéą░ą║ ąĮą░ą┐ąĖčüą░čéčī ąÜąŠą┤: if (!port) while (1);
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Dimon456
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĪą╗ąŠąČąĮčŗą╣ ą▓ąŠą┐čĆąŠčü AVR ąĮą░ ąĪ ą┐čĆąŠ volatile to const ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░ą╣ 09, 2019 18:12:40 |
|
ąÜą░čĆą╝ą░: 20
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 145
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą┤ąĄą║ 25, 2016 08:34:54
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1849
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
alex68md ą┐ąĖčüą░ą╗(ą░): ą┐ąŠč湥ą╝čā? ą▓čĆąŠą┤ąĄ ąŠąĮąŠ čā ą╝ąĄąĮčÅ čĆą░ą▒ąŠčéą░ąĄčé ą┤ą╗čÅ ąŠą▒ąŠąĖčģ čüąŠčüč鹊čÅąĮąĖą╣ ąÉ level č湥ą╝čā čā ą▓ą░čü čĆą░ą▓ąĮąŠ? ąöą░ą▓ą░ą╣č鹥 ą║ąŠąĮą║čĆąĄčéąĮąŠ ąĮą░ ą┐čĆąĖą╝ąĄčĆąĄ ąÜąŠą┤: while ((PIND & 0) ^ level); level-? ąÜąŠą┤: while ((PIND & 5) ^ level); level-? alex68md ą┐ąĖčüą░ą╗(ą░): ąĖąĮąŠą│ą┤ą░ čā ą╝ąĄąĮčÅ ą░ą┤čĆąĄčü ą▒čāą┤ąĄčé NULL ąŁč鹊 ą║ą░ą║? ą£ąĮąĄ ą┐čĆąŠčüč鹊 ąĖąĮč鹥čĆąĄčüąĮąŠ, ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▓čŗąĘą▓ą░čéčī čäčāąĮą║čåąĖčÄ ą┐čĆąĖąĮąĖą╝ą░čÄčēčāčÄ ą┐ą░čĆą░ą╝ąĄčéčĆ ą▒ąĄąĘ ą┐ąĄčĆąĄą┤ą░čćąĖ čüą░ą╝ąŠą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░? ąś, ą▓čŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓ ą║čāčĆčüąĄ č湥ą╝čā ą┐čĆąĖąĮą░ą┤ą╗ąĄąČąĖčé ą░ą┤čĆąĄčü 0x0000 SRAM?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
alex68md
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĪą╗ąŠąČąĮčŗą╣ ą▓ąŠą┐čĆąŠčü AVR ąĮą░ ąĪ ą┐čĆąŠ volatile to const ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░ą╣ 09, 2019 18:40:02 |
|
| ąōčĆčŗąĘąĄčé ą║ą░ąĮąĖč乊ą╗čī |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ čÅąĮą▓ 03, 2015 21:03:24
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 266
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąÜąŠą┤: void soft_reset(const uint8_t wdt_prescale = WDTO_15MS, const volatile uint8_t *port = NULL, const uint8_t pin = 1, const uint8_t level = 1){
wdt_enable(wdt_prescale);
if (!port) while (1);
while ((*port & pin) ^ level);
wdt_disable();
}
void isPIRHigh(){
soft_reset(WDTO_8S, &PIND, PIN_INT0, PIN_INT0); //break when PD0 high
}
void isPIRLow(){
soft_reset(WDTO_8S, &PIND, PIN_INT0, !PIN_INT0); //break when PD0 low
}
ą▓čŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓ ą║čāčĆčüąĄ č湥ą╝čā ą┐čĆąĖąĮą░ą┤ą╗ąĄąČąĖčé ą░ą┤čĆąĄčü 0x0000 SRAM? --- ąĮąĄčé. č湥ą╝čā? ąĮąŠ ą┤čāą╝ą░čÄ 0. ąĮąŠ ą▓čĆąŠą┤ąĄ ąŠąĮąŠ ą╝ąĮąĄ ąĖ ąĮąĄ ąĮą░ą┤ąŠ. ą╝ąĮąĄ čüą░ą╝ ą░ą┤čĆąĄčü 0 ą┤ą╗čÅ if ąĮčāąČąĄąĮ. čĆą░ąĘą▓ąĄ ą║ąŠą┤ ąĮąĄ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąÆčŗą▒ąĖčĆą░ąĄą╝ čüčģąĄą╝čā BMS ą┤ą╗čÅ ąĘą░čĆčÅą┤ą░ ą╗ąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗčģ (LiFePO4) ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓
ą×ą▒čÅąĘą░č鹥ą╗čīąĮčŗą╝ čāčüą╗ąŠą▓ąĖąĄą╝ ą┤ąŠą╗ą│ąŠą╣ ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ Li-FePO4-ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ EVE Energy, čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ BMS-ą╝ąĖą║čĆąŠčüčģąĄą╝. ąøąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗąĄ ąÉąÜąæ ąŠčéą╗ąĖčćą░čÄčéčüčÅ čéą░ą║ąĖą╝ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ, ą║ą░ą║ ą▓čŗčüąŠą║ą░čÅ ą╝ąĮąŠą│ąŠą║čĆą░čéąĮąŠčüčéčī čåąĖą║ą╗ąŠą▓ ąĘą░čĆčÅą┤ą░-čĆą░ąĘčĆčÅą┤ą░, ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▒čŗčüčéčĆąŠą╣ ąĘą░čĆčÅą┤ą║ąĖ, čāčüč鹊ą╣čćąĖą▓ąŠčüčéčī ą║ ą▒čāč乥čĆąĮąŠą╝čā čĆąĄąČąĖą╝čā čĆą░ą▒ąŠčéčŗ ąĖ ą┐čĆąĖąĄą╝ą╗ąĄą╝ą░čÅ čüč鹊ąĖą╝ąŠčüčéčī. ąØąŠ ą┤ą╗čÅ čŹčéąĖčģ ąÉąÜąæ ąŠč湥ąĮčī ą▓ą░ąČąĄąĮ ą║ąŠąĮčéčĆąŠą╗čī ą┐čĆąŠčåąĄčüčüą░ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░ ą┤ą╗čÅ ąĖąĘą▒ąĄą│ą░ąĮąĖčÅ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĘą░čĆčÅą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ 100% ąĘą░čĆčÅą┤ą░. ąśąĮąČąĄąĮąĄčĆčŗ ąÜą×ą£ą¤ąŁąø ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖą╗ąĖ čüą┐ąĖčüąŠą║ čéą░ą║ąĖčģ čĆąĄčłąĄąĮąĖą╣ ąŠčé čĆą░ąĘąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
Dimon456
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĪą╗ąŠąČąĮčŗą╣ ą▓ąŠą┐čĆąŠčü AVR ąĮą░ ąĪ ą┐čĆąŠ volatile to const ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░ą╣ 09, 2019 19:06:04 |
|
ąÜą░čĆą╝ą░: 20
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 145
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą┤ąĄą║ 25, 2016 08:34:54
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1849
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
alex68md ą┐ąĖčüą░ą╗(ą░): čĆą░ąĘą▓ąĄ ą║ąŠą┤ ąĮąĄ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ? ąÉ ą▓čŗ ąĄčēąĄ ą║ąŠą┤ ą▓ čĆą░ą▒ąŠč鹥 ąĖ ąĮąĄ ą┐čĆąŠą▒ąŠą▓ą░ą╗ąĖ? ą×ą▒čŖčÅčüąĮąĖč鹥 Dimon456 ą┐ąĖčüą░ą╗(ą░): ą£ąĮąĄ ą┐čĆąŠčüč鹊 ąĖąĮč鹥čĆąĄčüąĮąŠ, ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▓čŗąĘą▓ą░čéčī čäčāąĮą║čåąĖčÄ ą┐čĆąĖąĮąĖą╝ą░čÄčēčāčÄ ą┐ą░čĆą░ą╝ąĄčéčĆ ą▒ąĄąĘ ą┐ąĄčĆąĄą┤ą░čćąĖ čüą░ą╝ąŠą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
alex68md
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĪą╗ąŠąČąĮčŗą╣ ą▓ąŠą┐čĆąŠčü AVR ąĮą░ ąĪ ą┐čĆąŠ volatile to const ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░ą╣ 09, 2019 21:52:09 |
|
| ąōčĆčŗąĘąĄčé ą║ą░ąĮąĖč乊ą╗čī |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ čÅąĮą▓ 03, 2015 21:03:24
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 266
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąĪąŠčĆąĖ ąĮąĄ ąĘą░ą╝ąĄčéąĖą╗ čŹč鹊čé ą▓ąŠą┐čĆąŠčü
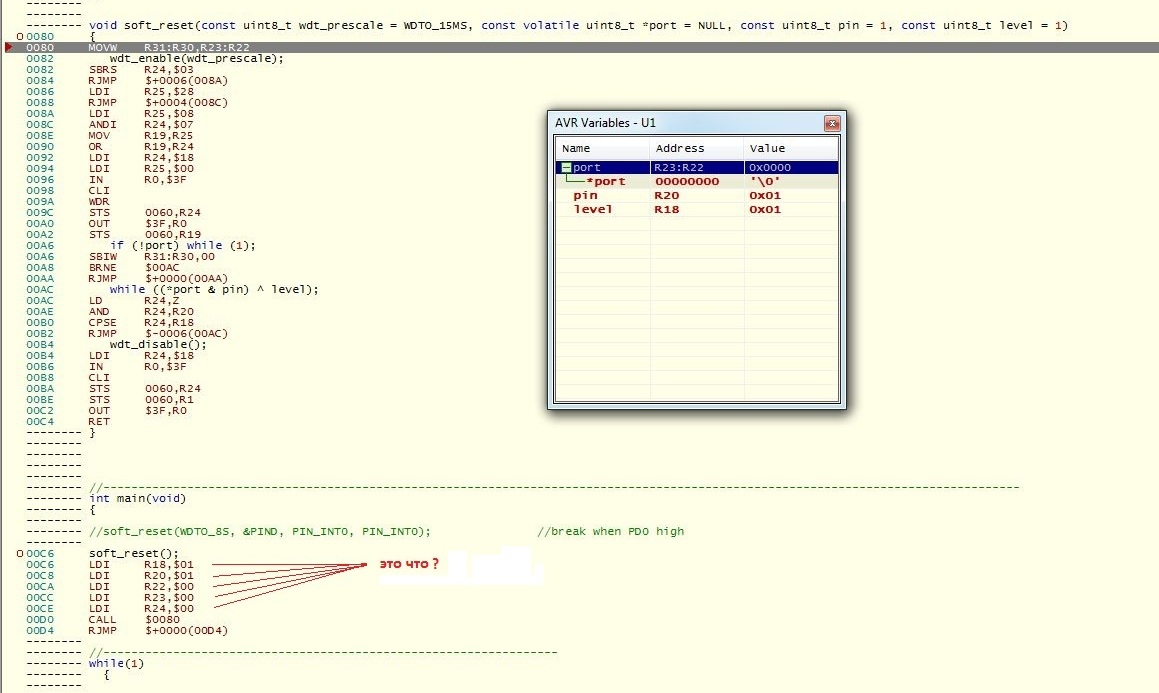
ąÆąŠčé čéą░ą║ soft_reset ();
ąØą░ ą▓ąĖčĆčéčāą░ą╗ą║ąĄ ą║ąŠą┤ čĆą░ą▒ąŠčéą░ąĄčé. ąĢčüčéčī ą┐čĆąĖčćąĖąĮčŗ ą┐ąŠč湥ą╝čā ąŠąĮąŠ ąĮąĄ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ ąČąĄą╗ąĄąĘąĄ?
ąØą░ą┐čĆąĖą╝ąĄčĆ ą║ą░ą║ ~port ąŠą║ą░ąĘą░ą╗ąŠčüčī čćč鹊 ą▓ ąČąĄą╗ąĄąĘąĄ ąĮąĄ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī čģąŠčéčÅ ą▓ąĖčĆčéčāą░ą╗ą║ą░ ąŠą║. ąØąŠ ą▓čĆąŠą┤ąĄ ąĖčüą┐čĆą░ą▓ąĖčé č鹥ą┐ąĄčĆčī ą▓čüąĄ ą║ąŠčüčÅą║ąĖ. ąóą░ą║ čćč鹊 čéą░ą╝ ą▓ 0x00 SRAM ?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Dimon456
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĪą╗ąŠąČąĮčŗą╣ ą▓ąŠą┐čĆąŠčü AVR ąĮą░ ąĪ ą┐čĆąŠ volatile to const ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ą╝ą░ą╣ 10, 2019 09:01:20 |
|
ąÜą░čĆą╝ą░: 20
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 145
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą┤ąĄą║ 25, 2016 08:34:54
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1849
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
alex68md ą┐ąĖčüą░ą╗(ą░): ąĪąŠčĆąĖ ąĮąĄ ąĘą░ą╝ąĄčéąĖą╗ čŹč鹊čé ą▓ąŠą┐čĆąŠčü
ąÆąŠčé čéą░ą║ soft_reset (); ą¤ąŠčćčéąĖ ą┐ąŠą▓ąĄčĆąĖą╗, ąŠą┤ąĮą░ą║ąŠ asm ą│ąŠą▓ąŠčĆąĖčé ąŠą▒ ąŠą▒čĆą░čéąĮąŠą╝ ąĪą┐ąŠą╣ą╗ąĄčĆ ąÆą░čł ąÜąŠą┤: soft_reset (); čĆą░ą▓ąĮąŠčüąĖą╗ąĄąĮ ąĘą░ą┐ąĖčüąĖ ąÜąŠą┤: soft_reset(WDTO_15MS,0,1,1);
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
alex68md
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĪą╗ąŠąČąĮčŗą╣ ą▓ąŠą┐čĆąŠčü AVR ąĮą░ ąĪ ą┐čĆąŠ volatile to const ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ą╝ą░ą╣ 10, 2019 12:55:44 |
|
| ąōčĆčŗąĘąĄčé ą║ą░ąĮąĖč乊ą╗čī |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ čÅąĮą▓ 03, 2015 21:03:24
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 266
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
čĆą░ą▓ąĮąŠčüąĖą╗ąĄąĮ ąĘą░ą┐ąĖčüąĖ
---
ą┤ą░ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ. ąĖ ą┤ą░ą╗ąĄąĄ if (!0) while (1); //čéčāčé ą┤ąŠą╗ąČąĮąŠ ąŠčüčéą░ąĮąŠą▓ąĖčéčīčüčÅ. if ą┤ąŠą╗ąČąĄąĮ čüčĆą░ą▒ąŠčéą░čéčī. ??
ą▓ ąČąĄą╗ąĄąĘąĄ ąĮąĄ ą┐čĆąŠą▓ąĄčĆčÅą╗. ąĮąŠ ą▓ąĖčĆčéčāą░ą╗ ą▓čĆąŠą┤ąĄ čĆą░ą▒ąŠčéą░ąĄčé, arduino ide ą║ąŠą╝ą┐ąĖą╗ąĖčé. ą┐čĆąŠą▒ą╗ąĄą╝ą░ čćč鹊 ą▓ąĖčĆčéčāą░ą╗ ąĮąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čéą░ą║ąĖąĄ č乊ą║čāčüčŗ ą║ą░ą║ ąĖąĘąĮą░čćą░ą╗čīąĮąŠ ąĮą░ą┐čĆąĖą╝ąĄčĆ čā ą╝ąĄąĮčÅ ą▒čŗą╗ąŠ ~port ąŠ čćčæą╝ Reflector čāą║ą░ąĘą░ą╗. ąĮąŠ ą▓ ą┤ą░ąĮąĮąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą▓čĆąŠą┤ąĄ čāą┐čĆąŠčüčéąĖą╗ ą┤ąŠ ąĮąĄą╝ąŠą│čā ąĖ ąĮąĖą║ą░ą║ąĖčģ rvalue/lvalue ą▓čĆąĄą╝ąĄąĮąĮčŗčģ ąĮąĄ čüąŠąĘą┤ą░čæčéčüčÅ. port ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī real time ąŠą▒ąĮąŠą▓ą╗čÅąĄą╝čŗą╣ volatile ą┐čĆąĖ ą║ą░ąČą┤ąŠą╣ ą┐čĆąŠą▓ąĄčĆą║ąĄ while/
ąĄčüą╗ąĖ čÅ ąĮąĖč湥ą│ąŠ ąĮąĄ čāą┐čāčüčéąĖą╗ ąĖąĘ ą▓ąĖą┤čā?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
alex68md
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĪą╗ąŠąČąĮčŗą╣ ą▓ąŠą┐čĆąŠčü AVR ąĮą░ ąĪ ą┐čĆąŠ volatile to const ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą╝ą░ą╣ 13, 2019 14:46:25 |
|
| ąōčĆčŗąĘąĄčé ą║ą░ąĮąĖč乊ą╗čī |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ čÅąĮą▓ 03, 2015 21:03:24
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 266
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
Dimon456,
čéą░ą║ čćč鹊 čü ą▓čŗąĘąŠą▓ąŠą╝ soft_reset(WDTO_15MS,0,1,1);
čĆą░ąĘą▓ąĄ ąĮąĄ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ ąČąĄą╗ąĄąĘąĄ?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Dimon456
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĪą╗ąŠąČąĮčŗą╣ ą▓ąŠą┐čĆąŠčü AVR ąĮą░ ąĪ ą┐čĆąŠ volatile to const ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą╝ą░ą╣ 13, 2019 18:37:35 |
|
ąÜą░čĆą╝ą░: 20
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 145
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą┤ąĄą║ 25, 2016 08:34:54
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1849
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąŁčéą░ č鹊 č鹊čćąĮąŠ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī, ą┤čĆčāą│ąŠą│ąŠ ąĄą╣ ąĮąĄ ą┤ą░ąĮąŠ, ą░ ą▓ąŠčé ą▓čüąĄ ąŠčüčéą░ą╗čīąĮąŠąĄ ... ą▒ąŠą╗čīčłąŠą╣ ą▓ąŠą┐čĆąŠčü.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
alex68md
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĪą╗ąŠąČąĮčŗą╣ ą▓ąŠą┐čĆąŠčü AVR ąĮą░ ąĪ ą┐čĆąŠ volatile to const ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą╝ą░ą╣ 14, 2019 23:05:37 |
|
| ąōčĆčŗąĘąĄčé ą║ą░ąĮąĖč乊ą╗čī |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ čÅąĮą▓ 03, 2015 21:03:24
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 266
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąØčā ą┐čĆąŠčüč鹊 ą▓čŗ ąĮą░ą┐čāą│ą░ą╗ąĖ čü 0 ą░ą┤čĆąĄčüąŠą╝. ą» čāąČ ą┐ąŠą┤čāą╝ą░ą╗ ąĮą░ avr ąŠčüąŠą▒ąĄąĮąĮčŗą╣ ąĮčāą╗ąĄą▓ąŠą╣ ą░ą┤čĆąĄčü ąóąŠą│ą┤ą░ ą┐ąŠč湥ą╝čā čā ą▓ą░čü ąĮąĄ ą┐ąŠą╗čāčćą░ą╗čüčÅ ą▓čŗąĘąŠą▓ ą▒ąĄąĘ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
alex68md
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĪą╗ąŠąČąĮčŗą╣ ą▓ąŠą┐čĆąŠčü AVR ąĮą░ ąĪ ą┐čĆąŠ volatile to const ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░ą╣ 23, 2019 10:13:27 |
|
| ąōčĆčŗąĘąĄčé ą║ą░ąĮąĖč乊ą╗čī |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ čÅąĮą▓ 03, 2015 21:03:24
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 266
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąÉ ą▓čŗ ąĄčēąĄ ą║ąŠą┤ ą▓ čĆą░ą▒ąŠč鹥 ąĖ ąĮąĄ ą┐čĆąŠą▒ąŠą▓ą░ą╗ąĖ? ą▓ąŠčé ą┐čĆąŠą▒čāčÄ ąĖ ą║ą░ą║ą░čÅč鹊 ą╗ą░ąČą░ ąÜąŠą┤: wdt_enable(wdt_prescale);
Serial.print("wdt =");
Serial.println(wdt_prescale);
Serial.print("port =");
Serial.println(*port);
Serial.print("pin =");
Serial.println(pin);
Serial.print("level =");
Serial.println(level);
if (!port) do {Serial.println("while 1");} while (1);
while ((*port & pin) ^ level);
Serial.println("wdt disable");
wdt_disable(); ą▓čŗą▓ąŠą┤ąĖčé ąÜąŠą┤: wdt =0
port =160
pin =1
level =1
while 1
while 1
while 1 čé.ąĄ. ą┐ąĄčĆąĄą┤ą░ąĄą╝ ąĮąŠ if ą┐ąŠč湥ą╝čā č鹊 ąĮąĄ čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĖ čāčģąŠą┤ąĖčé ą▓ while(1); ą║ą░ą║ čüą┤ąĄą╗ą░čéčī čćč鹊ą▒ if(!port) čüčĆą░ą▒ąŠčéą░ą╗? ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 39 minutes 58 seconds:čÅ ąĘą░ą╝ąĄčéąĖą╗ ą║ąŠą│ą┤ą░ port =160 if ąĮąĄ čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé. ą░ ąĖąĮąŠą│ą┤ą░ ąĮą░ č鹊čé ąČąĄ čüą░ą╝čŗą╣ ą▓čŗąĘąŠą▓ ą┐ąĄčĆąĄą┤ą░ąĄčé port =32 ąĖ č鹊ą│ą┤ą░ if čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé čé.ąĄ. if (! 160) true //ąĮąŠ čéčāčé č鹊ąČąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī false if (! 32) false čćč鹊 ąĘą░ ą▒ąĄąĘąŠą▒čĆą░ąĘąĖąĄ čŹč鹊čé avr
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ARV
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĪą╗ąŠąČąĮčŗą╣ ą▓ąŠą┐čĆąŠčü AVR ąĮą░ ąĪ ą┐čĆąŠ volatile to const ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░ą╣ 23, 2019 10:26:59 |
|
| ąŻą╝, č湥čüčéčī ąĖ čüąŠą▓ąĄčüčéčī. ąś čüą║čĆąŠą╝ąĮąŠčüčéčī. |
 |
ąÜą░čĆą╝ą░: 97
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2058
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą┤ąĄą║ 28, 2006 08:19:56
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 18030
ą×čéą║čāą┤ą░: ąØąŠą▓ąŠč湥čĆą║ą░čüčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 2
")
")
|
alex68md ą┐ąĖčüą░ą╗(ą░): čćč鹊 ąĘą░ ą▒ąĄąĘąŠą▒čĆą░ąĘąĖąĄ čŹč鹊čé avr ą┐ąŠčüą║ąŠą╗čīą║čā ą▓čŗ ąĘą░ą▓ąĄą╗ąĖ čāąČąĄ ąĮąĄ ąŠą┤ąĮčā č鹥ą╝čā čü ą┐čĆąŠą▒ą╗ąĄą╝ą░ą╝ąĖ, ą║ąŠč鹊čĆčŗąĄ ąĄčüčéčī č鹊ą╗čīą║ąŠ čā ą▓ą░čü ąĖ ąĮąĖ čĆą░ąĘčā ąĮąĄ ą▓čüčéčĆąĄčćą░ą╗ąĖčüčī ą▓čüąĄą╝ ąŠčüčéą░ą╗čīąĮčŗą╝, ą┤ąĄą╗ąŠ čÅą▓ąĮąŠ ąĮąĄ ą▓ AVR. ąĖ čüą╝ąĄčÄ ą▓ą░čü ąĘą░ą▓ąĄčĆąĖčéčī, čćč鹊 ą▓ ą╝ąŠąĖčģ ąĖą│čĆą░čģ čü AVR (ą░ ą▓ąĄą┤čā čÅ ąĖčģ čāąČąĄ ą╗ąĄčé 10, ąĮąĄ ą╝ąĄąĮčīčłąĄ) ąĖ ą▓čüąĄ ą┐ąĖąĮčŗ čćąĖčéą░čÄčéčüčÅ, ąĖ ą▓čüąĄ if-čŗ čüčĆą░ą▒ą░čéčŗą▓ą░čÄčé, ąĖ čåąĖą║ą╗čŗ ą║čĆčāčéčÅčéčüčÅ, čüą║ąŠą╗čīą║ąŠ ąĮą░ą┤ąŠ, ąĖ čāą║ą░ąĘą░č鹥ą╗ąĖ čĆą░ąĘčŗą╝ąĄąĮąŠą▓čŗą▓ą░čÄčéčüčÅ ąĖ ą▓čüąĄ ą┐čĆąŠč湥ąĄ čäčāąĮą║čåąĖąŠąĮąĖčĆčāąĄčé, ą║ą░ą║ ą┤ąŠą╗ąČąĮąŠ.
_________________
ąĄčüą╗ąĖ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čéčī č湥ą╗ąŠą▓ąĄą║ą░ čüąĮąĖąĘčā, ą┐ąŠą║ą░ąČąĄčéčüčÅ, čćč鹊 ą╝ąŠąĘą│ čā ąĮąĄą│ąŠ ą│ą╗čāą▒ąŠą║ąŠ ą▓ ąČąŠą┐ąĄ
ą┐čĆąĖ ą▓ąĘą│ą╗čÅą┤ąĄ ąĮą░ ą╝ąĮąŠą│ąĖčģ čüą▓ąĄčĆčģčā ąĮąĖč湥ą│ąŠ ąĮąĄ ą╝ąĄąĮčÅąĄčéčüčÅ...
ą£ąŠą╣ čāčÄčéąĮčŗą╣ ą▒ą╗ąŠąČąĖą║... ąĘą░čģąŠą┤ąĖč鹥!
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
alex68md
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĪą╗ąŠąČąĮčŗą╣ ą▓ąŠą┐čĆąŠčü AVR ąĮą░ ąĪ ą┐čĆąŠ volatile to const ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ą╝ą░ą╣ 24, 2019 11:54:26 |
|
| ąōčĆčŗąĘąĄčé ą║ą░ąĮąĖč乊ą╗čī |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ čÅąĮą▓ 03, 2015 21:03:24
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 266
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéčŗ čü čäčāąĮą║ąĖąĄą╣ ą┐čĆąĖą▓ąĄą┤ąĄąĮąĮąŠą╣ ą▓čŗčłąĄ ą┐ąŠą║ą░ąĘą░ą╗ąĖ čüą╗ąĄą┤čāčÄčēąĄąĄ...
ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ ą║ą░ą║ ą¤ąśąØ čā ą╝ąĄąĮčÅ ąĮąĄ čćąĖčéą░ą╗ ąĘąĮą░č湥ąĮąĖčÅ čÅ ą┐ąŠąĮčÅą╗ čäčāąĮą║čåąĖčÄ ąĮą░ ą┐čĆąĖąĄą╝ ą¤ą×ąĀąó, ąŠą┤ąĮą░ą║ąŠ
ą¤ą×ąĀąó čā ą╝ąĄąĮčÅ ą║ą░ą║ ą▓čŗčÅčüąĮąĖą╗ąŠčüčī ą▓ąŠąŠą▒čēąĄ ąĮąĄ čćąĖčéą░ąĄčé ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĮą░ ąĮąŠą│ąĄ ąĖąĮą┐čāčé ąĮą░ ą║ąŠč鹊čĆąŠą╣ ą▓ąĖčüąĖčé ą┤ą░čéčćąĖą║ ą┤ą╗čÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
čćč鹊ą▒ ą▓čŗ ąĮąĄ ą│ąŠą▓ąŠčĆąĖą╗ąĖ čćč鹊 čŹč鹊 ąĮąĄ ą¤ą×ąĀąó ą░ ą╝ąŠą╣ ą║ąŠą┤. ą┐ąŠčüą╝ąŠčéčĆąĖč鹥 ą║ąŠą┤ ą▓ čüąŠčüąĄą┤ąĮąĄą╣ č鹥ą╝ąĄ ą│ą┤ąĄ ąĮąĄčé ąĮąĖ ą║ąŠą│ąŠ ą║ąŠą┤ą░ ą║čĆąŠą╝ąĄ ąĘą░ą┐ąĖčüąĖ ąĮčāą╗ąĄą╣ ą▓ąŠ ą▓čüąĄ ą┐ąŠčĆčéčŗ ąĖ ą┐ąŠčĆčé ąĖ ą┐ąĖąĮ čĆą░ąĘąĮčŗąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ ą┤ą░čæčé. ą¤ąśąØ ą▒ąŠą╗čīčłąĄ ą▓ąĖą┤ąĖčé ąĄą┤ąĖąĮąĖčå ąĮą░ ąĮąŠą│ą░čģ. ąĮąŠ ą┐čĆąĖ čŹč鹊ą╝ ą▒ąŠą╗ąĄąĄ ą╝ąĄą┤ą╗ąĄąĮąĮčŗą╣ č湥ą╝ ą¤ą×ąĀąó
ą▓ąŠąŠą▒čēąĄą╝ ą┐ąĄčĆąĄą┤ą░čćą░ PINx ą║ą░ą║ ą░čĆą│čāą╝ąĄąĮčé ą▓ ą║ąŠąĮčåąĄ ą║ąŠąĮčåąŠą▓ čĆąĄčłąĖą╗ąŠ ą┐čĆąŠą▒ą╗ąĄą╝čā ą┐čĆąŠčüč鹊 ąŠąĮąŠ ą▓čüąĄ ą║ą░ą║ č鹊čĆą╝ąŠąĘąĮčāč鹊 čĆą░ą▒ąŠčéą░ąĄčé ą▓ąĮčāčéčĆąĖ čäčāąĮą║čåąĖąĖ. ą║ąŠą│ą┤ą░ ą┐čĆąŠčüč鹊 ą▓ ą╗čāą┐ąĄ čĆąĖą╗ čéą░ą╣ą╝ čÅ čüą║ą░ąĮąĖčĆčāčÄ ą╗ą░ą┐ą║čā č鹊 č湥čéą║ąŠ ą▓ąĖą┤ąĮą░ ąĄą┤ąĖąĮąĖčåą░ ąŠčé ą┤ą░čéčćąĖą║ą░. ą░ ą┐ąĄčĆąĄą┤ą░čÄ ą┐ąŠčĆčé ą▓ čäčāąĮą║čåąĖčÄ ąĖ ą┐čĆąŠą▓ąĄčĆčÅčÄ čéą░ą╝ ą║ą░ą║č鹊 ąĮąĄąŠčģąŠčéąĮąŠ while ą▓ąĮčāčéčĆąĖ čäčāąĮą║čåąĖąĖ ą▓ąĖą┤ąĖčé ąĄą┤ąĖąĮąĖčåčā. ą┐ąŠčŹč鹊ą╝čā čĆąĄčłąĖą╗ čéą░ą╝ čāą▓ąĄą╗ąĖčćąĖčéčī ą▓čĆąĄą╝čÅ (8čü ą╝ą░ą╗ąŠą▓ą░č鹊) ąĮą░ ąŠčéą╗ąŠą▓ ąĄą┤ąĖąĮąĖčåčŗ ąĖ ą▓ ą║ąŠąĮčåąĄ ą║ąŠąĮčåąŠą▓ ąĮą░ą▓ąĄčĆąĮąŠ ą▓ąŠąŠą▒čēąĄ ąĘą░ą║ąŠą╝ąĄąĮčéąĖčĆčāčÄ čŹč鹊čé ą▒ą╗ąŠą║. ą║ą░ą║č鹊 ąĮąĄ smoothly ą┐čĆąŠč鹥ą║ą░ąĄčé ą░ą▓č鹊ą┐čĆąŠą▓ąĄčĆą║ą░ čĆąŠą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ ą┤ą░čéčćąĖą║ą░.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ARV
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąĪą╗ąŠąČąĮčŗą╣ ą▓ąŠą┐čĆąŠčü AVR ąĮą░ ąĪ ą┐čĆąŠ volatile to const ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ą╝ą░ą╣ 24, 2019 12:02:00 |
|
| ąŻą╝, č湥čüčéčī ąĖ čüąŠą▓ąĄčüčéčī. ąś čüą║čĆąŠą╝ąĮąŠčüčéčī. |
|
ąÜą░čĆą╝ą░: 97
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2058
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą┤ąĄą║ 28, 2006 08:19:56
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 18030
ą×čéą║čāą┤ą░: ąØąŠą▓ąŠč湥čĆą║ą░čüčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 2
|
alex68md ą┐ąĖčüą░ą╗(ą░): ą┐ąŠčüą╝ąŠčéčĆąĖč鹥 ą║ąŠą┤ ą▓ čüąŠčüąĄą┤ąĮąĄą╣ č鹥ą╝ąĄ čÅ čüą╝ąŠčéčĆąĄą╗ ąĖ ąĮąĄ čāą▓ąĖą┤ąĄą╗ ą║ą░čéą░čüčéčĆąŠčäčŗ. ąĮąŠ č鹊čé čäą░ą║čé, čćč鹊 čéčĆąĖą▓ąĖą░ą╗čīąĮčŗą╣ ą║ąŠą┤ ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé, ą║ą░ą║ ą┤ąŠą╗ąČąĄąĮ, ą│ąŠą▓ąŠčĆąĖčé ąŠ č鹊ą╝, čćč鹊 ą┐čĆąŠą▒ą╗ąĄą╝ą░ ą│ą┤ąĄ-č鹊 ąĄčüčéčī. ąĮąŠ čÅ čāčéą▓ąĄčƹȹ┤ą░čÄ, čćč鹊 ąŠąĮą░ ąĮąĄ ą▓ąĮčāčéčĆąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (čü ąŠą│ąŠą▓ąŠčĆą║ąŠą╣, čćč鹊 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą┤ą░čéą░čłąĖčéčā Atmel). ą▓ ą║ą░č湥čüčéą▓ąĄ ąŠčüąĮąŠą▓ą░ąĮąĖą╣ ą╝ąŠąĄą│ąŠ čāčéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ čüąŠčłą╗čÄčüčī ąĮą░ ą╝ąĖą╗ą╗ąĖąŠąĮčŗ ą║ąŠąĮčüčéčĆčāą║čåąĖą╣, ąĮą░ą┐čĆčÅą╝čāčÄ čĆą░ą▒ąŠčéą░čÄčēąĖčģ čü čćč鹥ąĮąĖąĄą╝ PINx ąĖ ąĮąĄ ąĖą╝ąĄčÄčēąĖčģ ą┐ąŠą┤ąŠą▒ąĮčŗčģ ą┐čĆąŠą▒ą╗ąĄą╝ - ą┤ą░ąČąĄ ą░čĆą┤čāąĖąĮčēąĖą║ąĖ ąĮą░ą║ą╗ąĄą┐ą░ą╗ąĖ čéčŗčüčÅčćąĖ ą┐ąŠą┤ąĄą╗ąŠą║, ąĮąĄ ą│ąŠą▓ąŠčĆčÅ ą┐čĆąŠ "čģą░čĆą┤ą║ąŠčĆčēąĖą║ąŠą▓", ąŠą▒čģąŠą┤čÅčēąĖčģčüčÅ ą▒ąĄąĘ ąĮą░ą▓ąŠčĆąŠč鹊ą▓ ą░čĆą┤čāąĖąĮčŗ.
_________________
ąĄčüą╗ąĖ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čéčī č湥ą╗ąŠą▓ąĄą║ą░ čüąĮąĖąĘčā, ą┐ąŠą║ą░ąČąĄčéčüčÅ, čćč鹊 ą╝ąŠąĘą│ čā ąĮąĄą│ąŠ ą│ą╗čāą▒ąŠą║ąŠ ą▓ ąČąŠą┐ąĄ
ą┐čĆąĖ ą▓ąĘą│ą╗čÅą┤ąĄ ąĮą░ ą╝ąĮąŠą│ąĖčģ čüą▓ąĄčĆčģčā ąĮąĖč湥ą│ąŠ ąĮąĄ ą╝ąĄąĮčÅąĄčéčüčÅ...
ą£ąŠą╣ čāčÄčéąĮčŗą╣ ą▒ą╗ąŠąČąĖą║... ąĘą░čģąŠą┤ąĖč鹥!
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
|
ąĪčéčĆą░ąĮąĖčåą░ 4 ąĖąĘ 4
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 75 ] |
, , , |
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ |
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: ąĮąĄčé ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ ąĖ ą│ąŠčüčéąĖ: 47 |
|
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ
|

|
|