|
ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - ą┐čĆąŠą│čĆą░ą╝ąĮčŗą╣ SPI
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
 
|
ąĪčéčĆą░ąĮąĖčåą░ 1 ąĖąĘ 3
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 43 ] |
, , |
| ąÉą▓č鹊čĆ |
ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
sergo80zxc

|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: ą┐čĆąŠą│čĆą░ą╝ąĮčŗą╣ SPI  ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü čÅąĮą▓ 03, 2021 12:32:08 |
|
| ąÆčüčéą░ą╗ ąĮą░ ą╗ą░ą┐čŗ |
 |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą┐čĆ 04, 2014 09:34:08
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 113
ą×čéą║čāą┤ą░: ąĪą░ąĮą║čé-ą¤ąĄč鹥čĆą▒čāčĆą│
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą¤čĆąĖą▓ąĄčéčüčéą▓čāčÄ č鹊ą▓ą░čĆąĖčēąĖ čĆą░ą┤ąĖąŠą║ąŠčéčŗ). ą¤ąĖčüą░ą╗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčāčÄ čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ SPI ą┐čĆąŠč鹊ą║ąŠą╗ą░ ą┤ą╗čÅ ą░čéą╝ąĄą│ąĖ 168, ą┤ą╗čÅ ą╝ą░čüč鹥čĆą░ , ą┐ąĖąĮčŗ ą║ą░ą║ ą▓ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╝, ą▓ ą┐čĆąŠč鹥čāčüąĄ čĆą░ą▒ąŠčéą░ąĄčé, ą░ ą▓ ąČąĄą╗ąĄąĘąĄ ąĮą░ąŠčéčĆąĄąĘ ąŠčéą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ. ąĪą╗ąĄą╣ą▓ č鹊ąČąĄ 168 ą╝ąĄą│ą░, ąĮąŠ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ SPI ( čĆąĄąČąĖą╝ 0). ąĢčüčéčī čā ą║ąŠą│ąŠ ą║ą░ą║ąĖąĄ ą╝čŗčüą╗ąĖ ą┐ąŠč湥ą╝čā ą▓ ąČąĄą╗ąĄąĘąĄ ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé??? ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣, ą╝ą░čüč鹥čĆ ąÜąŠą┤: /*
* GccApplication37.c
*
* Created: 03.01.2021 0:42:56
* Author: čüąĄčĆą│ąĄą╣
*/
//
//
#include <avr/io.h>
#include <avr/interrupt.h>
#define F_CPU 8000000UL
#include <util/delay.h> // ą¤ąŠą┤ą║ą╗čÄčćą░ąĄą╝ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā čäčāąĮą║čåąĖą╣ ąĘą░ą┤ąĄčƹȹ║ąĖ ( ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čäčāąĮą║čåąĖą╣ ąĘą░ą┤ąĄčƹȹ║ąĖ ąĮą░ą┐čĆąĖą╝ąĄčĆ _delay_ms(10); // ąĘą░ą┤ąĄčƹȹ║ą░ 10 ą╝ąĖą╗ąĖčüąĄą║čāąĮą┤
//---------- ą¤ą×ąĀąó (SPI), ąØąÉąĪąóąĀą×ąÖąÜąÉ ąÆąźą×ąöą×ąÆ ąś ąÆą½ąźą×ąöą×ąÆ ----------
#define DDR_SPI DDRB // ąŠą▒ąĘąŠą▓ąĄą╝ ą┐ąŠčĆčé (DDRB) čāą┤ąŠą▒ąĮčŗą╝ ąĖą╝ąĄąĮąĄą╝ (DDR_SPI)
#define DD_MOSI DDB3 // ąŠą▒ąĘąŠą▓ąĄą╝ ą┐ąĖąĮ (DDB3) čāą┤ąŠą▒ąĮčŗą╝ ąĖą╝ąĄąĮąĄą╝ (DD_MOSI)
#define DD_SCK DDB5 // ąŠą▒ąĘąŠą▓ąĄą╝ ą┐ąĖąĮ (DDB5) čāą┤ąŠą▒ąĮčŗą╝ ąĖą╝ąĄąĮąĄą╝ (DD_SCK)
#define DD_SS DDB2 // ąŠą▒ąĘąŠą▓ąĄą╝ ą┐ąĖąĮ (DDB2) čāą┤ąŠą▒ąĮčŗą╝ ąĖą╝ąĄąĮąĄą╝ (DD_SS)
#define DD_MISO DDB4 // ąŠą▒ąĘąŠą▓ąĄą╝ ą┐ąĖąĮ (DDB4) čāą┤ąŠą▒ąĮčŗą╝ ąĖą╝ąĄąĮąĄą╝ (MISO_SS)
//---------- (SPI), ąØąÉąĪąóąĀą×ąÖąÜąÉ ąĀąÉąæą×ą¦ąśąź ą¤ąśąØą×ąÆ ----------
#define PORT_SPI PORTB // ąŠą▒ąĘąŠą▓ąĄą╝ ą┐ąŠčĆčé (PORTB) čāą┤ąŠą▒ąĮčŗą╝ ąĖą╝ąĄąĮąĄą╝ (PORT_SPI)
#define PB_SS PORTB2 // ąŠą▒ąĘąŠą▓ąĄą╝ ą┐ąĖąĮ (PB2) čāą┤ąŠą▒ąĮčŗą╝ ąĖą╝ąĄąĮąĄą╝ (PB_SS)
#define PB_SCK PORTB5 // ąŠą▒ąĘąŠą▓ąĄą╝ ą┐ąĖąĮ (PB5) čāą┤ąŠą▒ąĮčŗą╝ ąĖą╝ąĄąĮąĄą╝ (PB_SCK)
#define PB_MOSI PORTB3 // ąŠą▒ąĘąŠą▓ąĄą╝ ą┐ąĖąĮ (PB3) čāą┤ąŠą▒ąĮčŗą╝ ąĖą╝ąĄąĮąĄą╝ (PB_MOSI)
#define PB_MISO PORTB4 // ąŠą▒ąĘąŠą▓ąĄą╝ ą┐ąĖąĮ (PB4) čāą┤ąŠą▒ąĮčŗą╝ ąĖą╝ąĄąĮąĄą╝ (PB_MISO)
#define PIN_SPI PINB // PINB ąŠą▒ąĘą░ą▓ąĄą╝ PIN_SPI ( čéčāčé ą▒čāąĖčé ą┐čĆąŠą▓ąĄčĆą║ą░ ą▒ąĖčéą░ ąĖ ą▓čüąĄ čéą░ą║ą║ąŠąĄ)))
#define PIN_MISO PINB4 // ąŠą▒ąĘąŠą▓ąĄą╝ ą┐ąĖąĮ (PINB4) čāą┤ąŠą▒ąĮčŗą╝ ąĖą╝ąĄąĮąĄą╝ (PIN_MISO)
//---------- ą£ąÉąÜąĀą×ąĪ ąÆąÜąøą«ą¦ąĢąØąśą» ąś ą×ąóąÜąøą«ą¦ąĢąØąśą» ąÆą½ąÆą×ąöąÉ (SS) ą£ą×ąöąŻąøą» (SPI) ----------
#define macro_START_SLAVE() PORT_SPI &= ~(1 << PB_SS) // čüčéą░čĆčé ą▓ąĄą┤ąŠą╝ąŠą╝čā ą£ąÜ ( ą░ą║čéąĖą▓ąĖąĘąĖčĆčāąĄą╝ ą▓ąĄą┤ąŠą╝čŗą╣ ą£ąÜ ąĮą░ ą┐čĆąĖąĄą╝ ąĖ ą┐ąĄčĆąĄą┤ą░čćčā ą┤ą░ąĮąĮčŗčģ čüą▒čĆąŠčüąĖą▓ ą▓ 0 ą┐ąĖąĮ ąĖ ą╗ąĖąĮąĖčÄ (SS))
#define macro_STOP_SLAVE() PORT_SPI |= (1 << PB_SS) // čüč鹊ą┐ ą▓ąĄą┤ąŠą╝ąŠą╝čā ą£ąÜ ( ą┤ąĄąĘą░ą║čéąĖą▓ąĖąĘąĖčĆčāąĄą╝ ą▓ąĄą┤ąŠą╝čŗą╣ ą£ąÜ ąŠčéą║ą╗čÄčćąĖą╝ ą┐čĆąĖąĄą╝ ąĖ ą┐ąĄčĆąĄą┤ą░čćčā ą┤ą░ąĮąĮčŗčģ čāčüčéą░ąĮąŠą▓ąĖą▓ ą▓ 1 ą┐ąĖąĮ ąĖ ą╗ąĖąĮąĖčÄ (SS))
//----------
#define PORT_LED PORTD // PORTD ąŠą▒ąĘą░ą▓ąĄą╝ PORT_LED ( čéčāčé ąĖąĮą┤ąĖą║ą░čåąĖčÅ ą▒čāą┤ąĄčé ąĖ ą▓čüąĄ čéą░ą║ąŠąĄ))))
#define DDR_LED DDRD // DDRD ąŠą▒ąĘą░ą▓ąĄą╝ DDR_LED ( čéčāčé ąĮą░čüčéčĆąŠą╣ą║ą░ ą┐ąŠčĆčéą░ ąĮą░ ą▓čŗčģąŠą┤ ą▒čāąĖčé ąĖ ą▓čüąĄ čéą░ą║ą║ąŠąĄ)))
volatile uint8_t sis_taimer =0; // ąŠą▒čŖčÅą▓ąĖą╝ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ čüąĖčüč鹥ą╝ąĮąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░
//----------
void TIMER0_init(void) // ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ ą╝ąŠą┤čāą╗čÅ čéą░ą╣ą╝ąĄčĆą░ ąó0
{
TIMSK0 = 0b00000001; // ą▒ąĖčé ąĀąÆ0(TOIE0) čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ ą▓ 1, čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÄ čéą░ą╣ą╝ąĄčĆą░ /čüč湥čéčćąĖą║ą░ ąó0
TCCR0A = 0b00000000; // ą▒ąĖčéčŗ (WGM02,WGM01,WGM00) čüą▒čĆą░čüčŗą▓ą░ąĄą╝ ą▓ 0, ąĮą░čüčéčĆąŠą╣ą║ą░ čĆąĄąČąĖą╝ą░ Normal
TCCR0B = 0b00000100; // ąĮą░čüčéčĆą░ąĖą▓ą░ąĄą╝ ą┐čĆąĄą┤ą┤ąĄą╗ąĖč鹥ą╗čī ąĮą░ 256 (ą▒ąĖčéčŗ CS02=1,CS01=0,CS00=0),ą▒ąĖčé ąÆ3(WGM02) čüą▒čĆą░čüčŗą▓ą░ąĄą╝ ą▓ 0,čĆąĄąČąĖą╝ Normal
GTCCR = 0b00000001; // ą▒ąĖčé ąĀąÆ0(PSRSYNC) čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ ą▓ 1, ąĪą▒čĆąŠčü ą┐čĆąĄą┤ą┤ąĄą╗ąĖč鹥ą╗čÅ TO (čüą▒čĆą░čüčŗą▓ą░ąĄą╝ ą┐čĆąĄą┤. ą▓ ą║ąŠąĮčåąĄ ąĮą░čüčéčĆąŠąĄą║)
}
//----------
void SPI_MasterInit(void) // ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ ą╝ąŠą┤čāą╗čÅ SPI
{
DDR_SPI |= (1<<DD_MOSI)|(1<<DD_SCK)|(1<<DD_SS); // MOSI, SCK ąĖ SS čāčüčéą░ąĮąŠą▓ąĖą╝ ąĮą░ ą▓čŗčģąŠą┤ čéą░ą║ ą║ą░ą║ čā ąĮą░čü ą£ąÜ ą▓ čĆąĄąČąĖą╝ąĄ ą£ąÉąĪąóąĢąĀ
// MISO ąĮą░ ą▓čģąŠą┤ , ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčéčüčÅ ąĮčāą╗ąĄą╝
}
//----------
ISR(TIMER0_OVF_vect) // ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÄ čéą░ą╣ą╝ąĄčĆą░
{
sis_taimer ++; // ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄą╝ ąĮą░čł čüąĖčüč鹥ą╝ąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ
}
//----------
uint8_t SPI_send_and_receive_bytes (uint8_t data) // čäčāąĮą║čåąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ SPI. ą▓čģąŠą┤ąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą▒ą░ą╣čé ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ (data), ą┐ąŠą╗čāč湥ąĮčŗą╣ ą▒ą░ą╣čé ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ ą▓ ą▓čŗąĘčŗą▓ą░čÄčēčÄčÄ čäčāąĮą║čåąĖčÄ
{
uint8_t a = 7; // ą┐ąĄčĆąĄą╝ąĄąĮą░čÅ (a) ąĮąŠą╝ąĄčĆ ą▒ąĖčéą░ ą▒ą░ą╣čéą░ (data) ą▓ąĮą░č湥ą╗ąĄ čåąĖą║ą╗ą░ ąŠąĮ čĆą░ą▓ąĄąĮ 7 ( čü 7 čüčéą░čĆčłąĄą│ąŠ ą▒ąĖčéą░ ąĮą░čćąĮąĄą╝ ą┐ąĄčĆąĄą┤ą░čćčā)
uint8_t b = 7; // ą┐ąĄčĆąĄą╝ąĄąĮą░čÅ (b) ąĮąŠą╝ąĄčĆ ą▒ąĖčéą░ ą▒ą░ą╣čéą░ (out_bytes) ą▓ ąĮąĄąĄ ą▒čāą┤ąĄą╝ čćąĖčéą░čéčī ą┐ąŠą╗čāč湥ąĮčŗą╣ ą▒ąĖčé, ąŠąĮ čĆą░ą▓ąĄąĮ 7 ( čü 7 čüčéą░čĆčłąĄą│ąŠ ą▒ąĖčéą░ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝ ą▒ąĖčéčŗ ąŠčé čüą╗ąĄą╣ą▓ą░)
uint8_t out_bytes = 0; // čüąŠąĘą┤ą░ą┤ąĖą╝ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ (out_bytes), č湥čĆąĄąĘ ąĮąĄąĄ ą▒čāą┤ąĄą╝ ą▓ąŠąĘą▓čĆą░čēą░čéčī ą┐čĆąĖąĮčÅčéčŗą╣ ą▒ą░ą╣čé ą▓ ą▓čŗąĘčŗą▓ą░čÄčēčÄčÄ čäčāąĮą║čåąĖčÄ
// čĆąĄąČąĖą╝ 0, CPOL=0 čüąĖą│ąĮą░ą╗ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ, CPHA=0 čćč鹥ąĮąĖąĄ ą▒ąĖč鹊ą▓ ą┐ąŠ ą┐ąĄčĆąĄą┤ąĮąĄą╝čā čäčĆąŠąĮčéčā
macro_START_SLAVE(); // čüčéą░čĆčé ą▓ąĄą┤ąŠą╝ąŠą╝čā ą£ąÜ ( ą░ą║čéąĖą▓ąĖąĘąĖčĆčāąĄą╝ ą▓ąĄą┤ąŠą╝čŗą╣ ą£ąÜ ąĮą░ ą┐čĆąĖąĄą╝ ąĖ ą┐ąĄčĆąĄą┤ą░čćčā ą┤ą░ąĮąĮčŗčģ čüą▒čĆąŠčüąĖą▓ ą▓ 0 ą┐ąĖąĮ ąĖ ą╗ąĖąĮąĖčÄ (SS))
for (uint8_t i = 0; i < 8; i++) // čåąĖą║ą╗ "ą┤ą╗čÅ", ą┐ąŠą▓č鹊čĆčÅčÄčēąĖą╣čüčÅ 8 čĆą░ąĘ
{
_delay_ms(2); // ąĘą░ą┤ąĄčƹȹ║ą░ 10 ą╝ąĖą╗ąĖčüąĄą║čāąĮą┤
if (data & (1 << a)) // ą┐čĆąŠą▓ąĄčĆčÅąĄą╝ ą▒ąĖčé (a) ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ (data), ąĄčüą╗ąĖ čŹč鹊čé ą▒ąĖčé = 1, č鹊 ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąÜą×ąö 1. (ą▓čŗčĆą░ąČąĄąĮąĖąĄ ą▓ čüą║ąŠą▒ą║ą░čģ)
{ PORT_SPI |= (1<<PB_MOSI); // čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ ą┐ąĖąĮ (PB_MOSI) ą▓ 1. č鹊 ąĄčüčéčī čā ąĮą░čü ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ (data) ą▓ čŹč鹊ą╝ ą▒ąĖč鹥 1
}
else // ąĖąĮą░č湥 ąĄčüą╗ąĖ (a) ą▒ąĖčé = 0 , č鹊 ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝ ąÜą×ąö 2.
{ PORT_SPI &= ~(1 << PB_MOSI); // čüą▒čĆą░čüčŗą▓ą░ąĄą╝ ą┐ąĖąĮ (PB_MOSI) ą▓ 0. č鹊 ąĄčüčéčī čā ąĮą░čü ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ (data) ą▓ čŹč鹊ą╝ ą▒ąĖč鹥 0
}
a-- ; // ą┤ąĄą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄą╝ ąĮąŠą╝ąĄčĆ ą▒ąĖčéą░ (a) ą▒ą░ą╣čéą░ (data)
_delay_ms(2); // ąĘą░ą┤ąĄčƹȹ║ą░ 10 ą╝ąĖą╗ąĖčüąĄą║čāąĮą┤
PORT_SPI |= (1<<PB_SCK); // ą┐ąĖąĮ (SCK) čāčüčéą░ąĮąŠą▓ąĖą╝ ą▓ 1, ąĮą░čĆą░čüčéą░čÄčēąĖą╣ čäčĆąŠąĮčé)
asm("NOP"); // ą┐čāčüčéą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ
if (PIN_SPI & (1 << PIN_MISO)) // ą┐čĆąŠą▓ąĄčĆčÅąĄą╝ ą▒ąĖčé (PIN_SPI) ą┐ąŠčĆčéą░ (PIN_SPI), ąĄčüą╗ąĖ čŹč鹊čé ą▒ąĖčé = 1, č鹊 ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąÜą×ąö 1. (ą▓čŗčĆą░ąČąĄąĮąĖąĄ ą▓ čüą║ąŠą▒ą║ą░čģ)
{ out_bytes |= (1<<b); // čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ ą▒ąĖčé (b) ą▒ą░ą╣čéą░ (out_bytes) ą▓ 1.
}
else // ąĖąĮą░č湥 ąĄčüą╗ąĖ ą▒ąĖčé (PB_MISO) = 0 , č鹊 ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝ ąÜą×ąö 2.
{ out_bytes &= ~(1 << b); // čüą▒čĆą░čüčŗą▓ą░ąĄą╝ ą┐ąĖąĮ (b) ą▒ą░ą╣čéą░ (out_bytes) ą▓ 0.
}
b-- ; // ą┤ąĄą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄą╝ ąĮąŠą╝ąĄčĆ ą▒ąĖčéą░ (b) ą▒ą░ą╣čéą░ (out_bytes)
_delay_ms(2); // ąĘą░ą┤ąĄčƹȹ║ą░ 10 ą╝ąĖą╗ąĖčüąĄą║čāąĮą┤
_delay_ms(2); // ąĘą░ą┤ąĄčƹȹ║ą░ 10 ą╝ąĖą╗ąĖčüąĄą║čāąĮą┤
PORT_SPI &= ~(1<<PB_SCK); // ą┐ąĖąĮ (SCK) čüą▒čĆąŠčüąĖą╝ ą▓ 0,( ąĮą░čćą░ą╗čüčÅ ą┐ąĄčĆąĖąŠą┤ čéą░ą║čéą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. )
}
asm("NOP"); // ą┐čāčüčéą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ
macro_STOP_SLAVE(); // čüč鹊ą┐ ą▓ąĄą┤ąŠą╝ąŠą╝čā ą£ąÜ
return (out_bytes); // ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠą╗čāč湥ąĮąŠą│ąŠ ą▒ą░ą╣čéą░ ąŠčé čüą╗ąĄą╣ą▓ą░ ą▓ ą▓čŗąĘčŗą▓ą░čÄčēčÄčÄ čäčāąĮą║čåąĖčÄ
}
//----------
int main(void)
{
DDR_LED = 0b11111111; // ąĮą░ ą▓čŗčģąŠą┤ ( ąĮą░ ąĮąĄą╝ ąĮą░čłąĖ ąĖąĮą┤ąĖą║ą░č鹊čĆąĮčŗąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąĖą║ąĖ)))
TIMER0_init (); // ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ ą╝ąŠą┤čāą╗čÅ čéą░ą╣ą╝ąĄčĆą░ ąó0
SPI_MasterInit (); // ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ ą╝ąŠą┤čāą╗čÅ SPI
volatile uint8_t XXX; // ą▓ čŹčéčā ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēą░čéčüčÅ ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ čäčāąĮą║čåąĖąĖ (SPI_send_and_receive_bytes)
PORT_SPI &= ~(1<<PB_SCK); // ą┐ąĖąĮ (SCK) čüą▒čĆąŠčüąĖą╝ ą▓ 0,( čĆąĄąČąĖą╝ ąŠąČąĖą┤ą░ąĮąĖčÅ )
sei(); // ąĀą░ąĘčĆąĄčłąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ
while (1) // ą×čüąĮąŠą▓ąĮąŠą╣ čåąĖą║ą╗ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ
{
if (sis_taimer ==10) // čüąĖčüč鹥ą╝ąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ
{
XXX = SPI_send_and_receive_bytes (0b10101010); // ą┐čĆąĖčüą▓ą░ąĖą▓ą░ąĄą╝ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ (XXX) ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čäčāąĮą║čåąĖąĖ (SPI_send_and_receive_bytes)
asm("NOP"); // ą┐čāčüčéą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ
PORT_LED = XXX; // ą┐čĆąĖąĮčÅčéčŗą╣ ą▒ą░ą╣čé ą▓čŗą▓ąĄą┤ąĄą╝ ą▓ ą┐ąŠčĆčé ąĖąĮą┤ąĖą║ą░čåąĖąĖ
sis_taimer =0; // čüą▒čĆąŠčüąĖą╝ čéą░ą╣ą╝ąĄčĆ ąĖ ąČą┤ąĄą╝ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čéąĖą║ą░ čüąĖčüč鹥ą╝ąĮąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░
}
asm("NOP"); // ą┐čāčüčéą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ
}
}
ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣, čüą╗ąĄą╣ą▓, ą┐čĆąŠą▓ąĄčĆąĄąĮ ą▓ čĆą░ą▒ąŠč鹥. ąÜąŠą┤: /*
* GccApplication18.c
*
* Created: 29.10.2020 16:49:11
* Author: čüąĄčĆą│ąĄą╣
*/
// ---------- ąśąŚąŻą¦ąÉąĢą£ SPI ---------- ą¤ąĀąĢąĀą½ąÆąÉąØąśąĢ ą¤ą× SPI
// ą¤ąĀą×ąōąÉ ą┤ą╗čÅ ą┐čĆąŠčłąĖą▓ą║ąĖ ą╝ąĄą│ą░168čĆ ą▓ čĆąĄąČąĖą╝ąĄ SLAVE---------------------------------------------------------ą¤ąĀą×ąĢąÜąó 5--------------------------
// ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝ ą╝ą░čüč鹥čĆčā ą▒ąĄą│čāčēąĖą╣ ąŠą│ąŠąĮąĄą║ ą┐ąŠ ą║ąŠą╝ą░ąĮą┤ąĄ ą╝ą░čüč鹥čĆą░.
//
// ą┐ąĄčĆąĄą┤ą░ąĄą╝ ą╝ą░čüč鹥čĆčā ą╝ą░čüčüąĖą▓ ą┐ąŠą▒ą░ą╣čéąĮąŠ ąĖ ą┐ąŠ ą║čĆčāą│čā
//
#include <avr/io.h>
#include <avr/interrupt.h>
#define F_CPU 1000000UL
//---------- ąØąÉąĪąóąĀą×ąÖąÜąÉ ą¤ą×ąĀąóąÉ (SPI) ----------
#define DDR_SPI DDRB // ąŠą▒ąĘąŠą▓ąĄą╝ ą┐ąŠčĆčé (DDRB) čāą┤ąŠą▒ąĮčŗą╝ ąĖą╝ąĄąĮąĄą╝ (DDR_SPI)
#define DD_MISO DDB4 // ąŠą▒ąĘąŠą▓ąĄą╝ ą┐ąĖąĮ (DDB4) čāą┤ąŠą▒ąĮčŗą╝ ąĖą╝ąĄąĮąĄą╝ (MISO_SS)
//----------
#define PORT_LED PORTD // PORTD ąŠą▒ąĘą░ą▓ąĄą╝ PORT_LED ( čéčāčé ąĖąĮą┤ąĖą║ą░čåąĖčÅ ą▒čāą┤ąĄčé ąĖ ą▓čüąĄ čéą░ą║ąŠąĄ))))
#define DDR_LED DDRD // DDRD ąŠą▒ąĘą░ą▓ąĄą╝ DDR_LED ( čéčāčé ąĮą░čüčéčĆąŠą╣ą║ą░ ą┐ąŠčĆčéą░ ąĮą░ ą▓čŗčģąŠą┤ ą▒čāąĖčé ąĖ ą▓čüąĄ čéą░ą║ą║ąŠąĄ)))
//----------
uint8_t go [8] = // ąŠą▒čŖčÅą▓ąĖą╝ ą╝ą░čüčüąĖą▓ (go) ąĮą░ 8 菹╗ąĄą╝ąĄąĮč鹊ą▓ ąĖąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄą╝ ą║ą░ąČą┤čŗą╣ 菹╗ąĄą╝ąĄąĮčé čćąĖčüą╗ąŠą╝
{
0b00000001, // ąĘą░ą│ąŠčĆą░čéčüčÅ ą▒čāą┤ąĄčé ą┐ąĖąĮ (PD0)
0b00000010, // ąĘą░ą│ąŠčĆą░čéčüčÅ ą▒čāą┤ąĄčé ą┐ąĖąĮ (PD1)
0b00000100, // ąĘą░ą│ąŠčĆą░čéčüčÅ ą▒čāą┤ąĄčé ą┐ąĖąĮ (PD2)
0b00001000, // ąĘą░ą│ąŠčĆą░čéčüčÅ ą▒čāą┤ąĄčé ą┐ąĖąĮ (PD3)
0b00010000, // ąĘą░ą│ąŠčĆą░čéčüčÅ ą▒čāą┤ąĄčé ą┐ąĖąĮ (PD4)
0b00100000, // ąĘą░ą│ąŠčĆą░čéčüčÅ ą▒čāą┤ąĄčé ą┐ąĖąĮ (PD5)
0b01000000, // ąĘą░ą│ąŠčĆą░čéčüčÅ ą▒čāą┤ąĄčé ą┐ąĖąĮ (PD6)
0b10000000, // ąĘą░ą│ąŠčĆą░čéčüčÅ ą▒čāą┤ąĄčé ą┐ąĖąĮ (PD7)
};
//----------
void SPI_SlaveInit(void) // ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ ą╝ąŠą┤čāą╗čÅ SPI ą£ąÜ ą▓ čĆąĄąČąĖą╝ąĄ (Slave)
{
DDR_SPI |= (1<<DD_MISO); // MISO čāčüčéą░ąĮąŠą▓ąĖą╝ ąĮą░ ą▓čŗčģąŠą┤ čéą░ą║ ą║ą░ą║ čā ąĮą░čü ą£ąÜ ą▓ čĆąĄąČąĖą╝ąĄ SLAVE
// MOSI, SCK ąĖ SS ąĮą░ ą▓čģąŠą┤ , ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčéčüčÅ ąĮčāą╗ąĄą╝
SPCR |= (1<<SPE)|(1<<SPR0)|(1<<SPR1)|(1<<SPIE); // čāčüčéą░ąĮąŠą▓ąĖą╝ ą▒ąĖčé (SPE) ą▓ 1 ą▓ą║ą╗čÄčćąĖą╝ ą╝ąŠą┤čāą╗čī SPI, ą▒ąĖčé (MSTR) čüą▒čĆąŠčłąĄąĮ ą▓ 0 ą▓ą║ą╗čÄčćąĖą╝ čĆąĄąČąĖą╝ (Slave),
// (SPR0) ąĖ (SPR1) čāčüčéą░ąĮąŠą▓ąĖą╝ ą▓ 1 čĆąĄąČąĖą╝ čüą║ąŠčĆąŠčüčéąĖ fclk/128, (DORD) čüą▒čĆąŠčłąĄąĮ ą▓ 0 ąĖ ą┐ąĄčĆą▓čŗą╝
// ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ čüčéą░čĆčłąĖą╣ (čüąĄą┤čīą╝ąŠą╣) ą▒ąĖčé, (CPOL) čüą▒čĆąŠčłąĄąĮ ą▓ 0 ąĖ ąĮą░ ą╗ąĖąĮąĖąĖ SCK ą▓ąŠ ą▓čĆąĄą╝čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĮąĖąĘą║ąĖą╣ ą╗ąŠą│ąĖč湥čüą║ąĖą╣
} // čāčĆąŠą▓ąĄąĮčī,(CPHA) čüą▒čĆąŠčłąĄąĮ ą▓ 0 ąĖ ą┤ą░ąĮąĮčŗąĄ čüčćąĖčéčŗą▓ą░čÄčéčüčÅ ą┐ąŠ ąĮą░čĆą░čüčéą░čÄčēąĄą╝čā čäčĆąŠąĮčéčā čüąĖą│ąĮą░ą╗ą░,(SPIE) ą▓ 1 ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé SPI
//----------
uint8_t running_light(void) // čäčāąĮą║čåąĖčÅ ą┐ąĄčĆąĄą┤ą░ąĄčé ą▓ ą▓čŗąĘčŗą▓ą░čÄčēčÄčÄ čäčāąĮą║čåąĖčÄ ą▒ąĄą│čāčēąĖą╣ ąŠą│ąŠąĮąĄą║ (ą┐čĆąĖ ą║ą░ąČą┤ąŠą╝ ą▓čŗąĘąŠą▓ąĄ ą▓ ą┐ąĄčĆąĄą┤ą░ąĮąŠą╝ ą▒ą░ą╣č鹥 ąĄą┤ąĄąĮąĖčåą░ čüą╝ąĄčēą░ąĄčéčüčÅ ąĮą░ čĆą░ąĘčĆčÅą┤ ą▓ą╗ąĄą▓ąŠ)
{
uint8_t data = 0; // čüąŠąĘą┤ą░ąĄą╝ ąĖ ąĘą░ą┤ą░ąĄą╝ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ (data),
static uint8_t z=0; // čüčéą░čéąĖč湥čüą║ą░čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ (z) , ąŠąĮą░ čā ąĮą░čü ą▒čāą┤ąĄčé ą┐ąŠčĆčÅą┤ą║ąŠą▓čŗą╝ ąĮąŠą╝ąĄčĆąŠą╝ ą╝ą░čüčüąĖą▓ą░ (go)
data = go [z]; // ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝ ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ (data) 菹╗ąĄą╝ąĄąĮčé ą╝ą░čüčüąĖą▓ą░ (go) čü ą┐ąŠčĆčÅą┤ą║ąŠą▓čŗą╝ ąĮąŠą╝ąĄčĆąŠą╝ (z)
z++; // ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄą╝ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ (z) čćč鹊ą▒čŗ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ ąĖąĮč鹥čĆą░čåąĖąĖ ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ (data) ą┐ąŠčüčéčāą┐ąĖą╗ čüą╗ąĄą┤čāčÄčēąĖą╣ ą┐ąŠ čüč湥čéčā 菹╗ąĄą╝ąĄąĮčé ą╝ą░čüčüąĖą▓ą░
if (z>7) z=0; // ąĘą░čēąĖčéą░ ąŠčé ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą╝ą░čüčüąĖą▓ą░ (go)
return (data); // ą┐ąĄčĆąĄą┤ą░ąĄą╝ ą▓ ą▓čŗąĘčŗą▓ą░čÄčēčÄčÄ čäčāąĮą║čåąĖčÄ ąĮą░čł ą▒ą░ą╣čé
}
//----------
ISR(SPI_STC_vect) // ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒ą░ą╣čéą░
{
PORT_LED = SPDR; // čćąĖčéą░ąĄą╝ (SPDR) ąĖ ą▓čŗą▓ąŠą┤ąĖą╝ ą┐ąŠą╗čāč湥ąĮčŗą╣ ą▒ą░ą╣čé ą▓ ą┐ąŠčĆčé (PORT_LED)
SPDR = running_light(); // ąĘą░ą┐ąĖčłąĄą╝ ą▓ ą┤ą░čéą░ čĆąĄą│ąĖčüčéčĆ (SPDR) ą▒ą░ą╣čé ą┐ąŠą╗čāč湥ąĮčŗą╣ ąĖąĘ čäčāąĮą║čåąĖąĖ (running_light)
}
//----------
int main(void)
{
DDR_LED = 0b11111111; // ąĮą░ ą▓čŗčģąŠą┤ ( ąĮą░ ąĮąĄą╝ ąĮą░čłąĖ ąĖąĮą┤ąĖą║ą░č鹊čĆąĮčŗąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąĖą║ąĖ)))
SPI_SlaveInit (); // ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ ą╝ąŠą┤čāą╗čÅ SPI ą£ąÜ ą▓ čĆąĄąČąĖą╝ąĄ (Slave)
SPDR = 0b11110000; // ąĘą░ą┐ąĖčłąĄą╝ ą▓ čĆąĄą│ąĖčüčéčĆ ą┤ą░ąĮąĮčŗčģ (SPDR) čćąĖčüą╗ąŠ 0, ąĄą│ąŠ čüčćąĖčéą░ąĄčé ą╝ą░čüč鹥čĆ ą┐čĆąĖ ą┐ąĄčĆą▓ąŠą╝ ąŠą▒ą╝ąĄąĮąĄ ą▒ą░ą╣čéą░ą╝ąĖ ą┐ąŠ SPI
sei(); // ąĀą░ąĘčĆąĄčłąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ
while (1) // ą×čüąĮąŠą▓ąĮąŠą╣ čåąĖą║ą╗ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ
{
asm("NOP"); // ą┐čāčüčéą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ
}
}
ą▓ ąČąĄą╗ąĄąĘąĄ ąĮą░ ą╝ą░čüč鹥čĆąĄ ąĘą░ą│ąŠčĆą░čÄčéčüčÅ ą┐ąĖąĮčŗ 4-7 ( č鹊 ąĄčüčéčī ą╝ą░čüč鹥čĆ ą┐ąŠą╗čāčćąĖą╗ ąŠą┤ąĖąĮ ą▒ą░ą╣čé ąŠčé čüą╗ąĄą╣ą▓ą░ ąĖ ą┤ą░ą╗čīčłąĄ ąĮąĄ ą╝ąŠąČąĄčé ą┐ąŠč湥ą╝čā č鹊 ą┐ąŠą╗čāčćą░čéčī)
_________________
ą│ą╗ą░ąĘą░ ą▒ąŠčÅčéčüčÅ, ą░ čĆčāą║ąĖ čćč鹊 č鹊 ąĮąĄ ą┤ąĄą╗ą░čÄčé))
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
 |
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Eddy_Em
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą┐čĆąŠą│čĆą░ą╝ąĮčŗą╣ SPI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü čÅąĮą▓ 03, 2021 12:57:38 |
|
| ąĪąŠą▒čāčéčŗą╗čīąĮąĖą║ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: -12
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: -25
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ąĖčÄą╗ 12, 2019 22:52:01
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2525
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąÜąŠą│ą┤ą░ ą║ąŠčéčā ą┤ąĄą╗ą░čéčī ąĮąĄč湥ą│ąŠ, ąŠąĮ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ SPI čĆąĄą░ą╗ąĖąĘčāąĄčé!..
ąŚąÉą¦ąĢą£? ąÉąÆąĀą║ą░ ŌĆö č鹊 ąĄčēąĄ ą┤ąĄčĆčīą╝ąŠ, ą║ą░ą║ąŠą╣, ąĮą░čäąĖą│, ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ SPI?
ąÆčŗ ąĄčēąĄ CAN ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ ąĘą░ą┐ąĖą╗ąĖč鹥. ąś USB-HS ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ŌĆ”
_________________
Linux rules! Windows must die. ąŚą┤čĆą░ą▓ąŠą╝čŗčüą╗čÅčēąĖą╣ č湥ą╗ąŠą▓ąĄą║ ą┤ąŠą▒čĆąŠą▓ąŠą╗čīąĮąŠ ą▒čāą┤ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╝ą░čüčéą┤ą░ąĄą╝ ą╗ąĖčłčī ą▓ ą┤ą▓čāčģ čüą╗čāčćą░čÅčģ: ą┐ąŠą┤ ą┤čāą╗ąŠą╝ ą░ą▓č鹊ą╝ą░čéą░ ąĖą╗ąĖ ą┐ąŠą┤ ą▓ą╗ąĖčÅąĮąĖąĄą╝ ą░ąĮą░ą╗čīąĮąŠą│ąŠ ąĘąŠąĮą┤ą░.
ą» ąĮą░ ą│ąĖčéčģą░ą▒ąĄ, ą▓ ą¢ą¢
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
sergo80zxc
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą┐čĆąŠą│čĆą░ą╝ąĮčŗą╣ SPI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü čÅąĮą▓ 03, 2021 13:02:12 |
|
| ąÆčüčéą░ą╗ ąĮą░ ą╗ą░ą┐čŗ |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą┐čĆ 04, 2014 09:34:08
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 113
ą×čéą║čāą┤ą░: ąĪą░ąĮą║čé-ą¤ąĄč鹥čĆą▒čāčĆą│
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
Eddy_Em, ąĮčā čÅ ąĖąĘčāčćą░čÄ SPI))) čü ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ ą▓čüąĄ ą▓čĆąŠą┤ąĄ ą┐čĆąŠčüč鹊 ąĖ ą┐ąŠąĮčÅčéąĮąŠ, ą░ ą▓ąŠčé ąĮą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╝ ąĘą░čéčĆąŠąĖą╗. ą░ą▓čĆą║ąĖ ą┐čĆąŠčüč鹊 ą▒ąŠą╗ąĄ ą╝ąĄąĮąĄąĄ ąĘąĮą░ą║ąŠą╝čŗ
_________________
ą│ą╗ą░ąĘą░ ą▒ąŠčÅčéčüčÅ, ą░ čĆčāą║ąĖ čćč鹊 č鹊 ąĮąĄ ą┤ąĄą╗ą░čÄčé))
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
NStorm
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą┐čĆąŠą│čĆą░ą╝ąĮčŗą╣ SPI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü čÅąĮą▓ 03, 2021 13:06:54 |
|
| ą¤ąŠčüčéą░ą▓čēąĖą║ ą▓ą░ą╗ąĄčĆčīčÅąĮą║ąĖ ą┤ą╗čÅ ąÜąŠčéą░ |
ąÜą░čĆą╝ą░: 12
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 532
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ąĖčÄą╗ 17, 2013 13:55:57
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1978
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąÜčāą┐ąĖč鹥 ą╗ąŠą│ąĖč湥čüą║ąĖą╣ ą░ąĮą░ą╗ąĖąĘą░č鹊čĆ ąĘą░ ~600čĆ ąĮą░ CY8, ąĄčüą╗ąĖ ąĄčēąĄ ąĮąĄčé. ąØąĄąĘą░ą╝ąĄąĮąĖą╝ą░čÅ ą▓ąĄčēčī ą▓ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖąĖ ą┐ąŠą┤ąŠą▒ąĮčŗčģ ą┐čĆąŠą▒ą╗ąĄą╝ ą▓ ąČąĄą╗ąĄąĘąĄ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąÆčŗą▒ąĖčĆą░ąĄą╝ čüčģąĄą╝čā BMS ą┤ą╗čÅ ąĘą░čĆčÅą┤ą░ ą╗ąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗčģ (LiFePO4) ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓
ą×ą▒čÅąĘą░č鹥ą╗čīąĮčŗą╝ čāčüą╗ąŠą▓ąĖąĄą╝ ą┤ąŠą╗ą│ąŠą╣ ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ Li-FePO4-ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ EVE Energy, čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ BMS-ą╝ąĖą║čĆąŠčüčģąĄą╝. ąøąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗąĄ ąÉąÜąæ ąŠčéą╗ąĖčćą░čÄčéčüčÅ čéą░ą║ąĖą╝ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ, ą║ą░ą║ ą▓čŗčüąŠą║ą░čÅ ą╝ąĮąŠą│ąŠą║čĆą░čéąĮąŠčüčéčī čåąĖą║ą╗ąŠą▓ ąĘą░čĆčÅą┤ą░-čĆą░ąĘčĆčÅą┤ą░, ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▒čŗčüčéčĆąŠą╣ ąĘą░čĆčÅą┤ą║ąĖ, čāčüč鹊ą╣čćąĖą▓ąŠčüčéčī ą║ ą▒čāč乥čĆąĮąŠą╝čā čĆąĄąČąĖą╝čā čĆą░ą▒ąŠčéčŗ ąĖ ą┐čĆąĖąĄą╝ą╗ąĄą╝ą░čÅ čüč鹊ąĖą╝ąŠčüčéčī. ąØąŠ ą┤ą╗čÅ čŹčéąĖčģ ąÉąÜąæ ąŠč湥ąĮčī ą▓ą░ąČąĄąĮ ą║ąŠąĮčéčĆąŠą╗čī ą┐čĆąŠčåąĄčüčüą░ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░ ą┤ą╗čÅ ąĖąĘą▒ąĄą│ą░ąĮąĖčÅ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĘą░čĆčÅą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ 100% ąĘą░čĆčÅą┤ą░. ąśąĮąČąĄąĮąĄčĆčŗ ąÜą×ą£ą¤ąŁąø ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖą╗ąĖ čüą┐ąĖčüąŠą║ čéą░ą║ąĖčģ čĆąĄčłąĄąĮąĖą╣ ąŠčé čĆą░ąĘąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
Eddy_Em
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą┐čĆąŠą│čĆą░ą╝ąĮčŗą╣ SPI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü čÅąĮą▓ 03, 2021 13:07:16 |
|
| ąĪąŠą▒čāčéčŗą╗čīąĮąĖą║ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: -12
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: -25
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ąĖčÄą╗ 12, 2019 22:52:01
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2525
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
sergo80zxc, ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ UART, I2C, SPI ąĖ čé.ą┐. ŌĆö čŹč鹊 ą┐čĆąŠčüč鹊 ą╝ą░čĆą░ąĘą╝ čćąĖčüč鹊ą╣ ą▓ąŠą┤čŗ!
ąĢčüą╗ąĖ ąĮąĄčé ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ, ąĘąĮą░čćąĖčé, ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓čŗą▒čĆą░ąĮ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠ!!!
_________________
Linux rules! Windows must die. ąŚą┤čĆą░ą▓ąŠą╝čŗčüą╗čÅčēąĖą╣ č湥ą╗ąŠą▓ąĄą║ ą┤ąŠą▒čĆąŠą▓ąŠą╗čīąĮąŠ ą▒čāą┤ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╝ą░čüčéą┤ą░ąĄą╝ ą╗ąĖčłčī ą▓ ą┤ą▓čāčģ čüą╗čāčćą░čÅčģ: ą┐ąŠą┤ ą┤čāą╗ąŠą╝ ą░ą▓č鹊ą╝ą░čéą░ ąĖą╗ąĖ ą┐ąŠą┤ ą▓ą╗ąĖčÅąĮąĖąĄą╝ ą░ąĮą░ą╗čīąĮąŠą│ąŠ ąĘąŠąĮą┤ą░.
ą» ąĮą░ ą│ąĖčéčģą░ą▒ąĄ, ą▓ ą¢ą¢
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
sergo80zxc
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą┐čĆąŠą│čĆą░ą╝ąĮčŗą╣ SPI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü čÅąĮą▓ 03, 2021 13:25:36 |
|
| ąÆčüčéą░ą╗ ąĮą░ ą╗ą░ą┐čŗ |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą┐čĆ 04, 2014 09:34:08
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 113
ą×čéą║čāą┤ą░: ąĪą░ąĮą║čé-ą¤ąĄč鹥čĆą▒čāčĆą│
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
Eddy_Em, čüąŠą│ą╗ą░čüąĖč鹥čüčī ą▓čüąĄ ąČąĄ ą╝ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ ą▓ ą║ą░ą║ąĖčģ č鹊 čüą╗čāčćą░čÅčģ)
_________________
ą│ą╗ą░ąĘą░ ą▒ąŠčÅčéčüčÅ, ą░ čĆčāą║ąĖ čćč鹊 č鹊 ąĮąĄ ą┤ąĄą╗ą░čÄčé))
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Eddy_Em
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą┐čĆąŠą│čĆą░ą╝ąĮčŗą╣ SPI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü čÅąĮą▓ 03, 2021 14:43:08 |
|
| ąĪąŠą▒čāčéčŗą╗čīąĮąĖą║ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: -12
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: -25
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ąĖčÄą╗ 12, 2019 22:52:01
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2525
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
sergo80zxc, č鹊ą╗čīą║ąŠ ą▓ 菹║čüčéčĆą░ąŠčĆą┤ąĖąĮą░čĆąĮčŗčģ, ą║ąŠą│ą┤ą░ "ąŠč湥ąĮčī ąĮą░ą┤ąŠ" ąĮą░ą┐ąĖčüą░čéčī ą┐čĆąŠčłąĖą▓ą║čā ą┤ą╗čÅ ą│ąŠč鹊ą▓ąŠą╣ ąČąĄą╗ąĄąĘčÅą║ąĖ, ą░ ą┐čĆąŠąĄą║čéąĖčĆąŠą▓ą░ą╗ ąĄąĄ ąĖą┤ąĖąŠčéŌĆ”
ąØąŠ ąĮą░ ą╝ąŠą╣ ą▓ąĘą│ą╗čÅą┤, ą▓ ą┤ą░ąĮąĮąŠą╝ čüą╗čāčćą░ąĄ ą▒čŗčüčéčĆąĄą╣ ą▒čāą┤ąĄčé čüą┐čĆąŠąĄą║čéąĖčĆąŠą▓ą░čéčī čü ąĮčāą╗čÅ ąĮąŠą▓čāčÄ ąČąĄą╗ąĄąĘčÅą║čā ą┐čĆą░ą▓ąĖą╗čīąĮąŠ. ąöą░ ąĖ ą┐ąŠ ą┤ąĄąĮčīą│ą░ą╝ ą▓čŗą│ąŠą┤ąĮąĄą╣ ą▒čāą┤ąĄčé: ą┤ąŠčĆąŠąČąĄ ą┐ąŠčćą░čüąŠą▓ą║ą░ ą▓čŗą╣ą┤ąĄčé.
_________________
Linux rules! Windows must die. ąŚą┤čĆą░ą▓ąŠą╝čŗčüą╗čÅčēąĖą╣ č湥ą╗ąŠą▓ąĄą║ ą┤ąŠą▒čĆąŠą▓ąŠą╗čīąĮąŠ ą▒čāą┤ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╝ą░čüčéą┤ą░ąĄą╝ ą╗ąĖčłčī ą▓ ą┤ą▓čāčģ čüą╗čāčćą░čÅčģ: ą┐ąŠą┤ ą┤čāą╗ąŠą╝ ą░ą▓č鹊ą╝ą░čéą░ ąĖą╗ąĖ ą┐ąŠą┤ ą▓ą╗ąĖčÅąĮąĖąĄą╝ ą░ąĮą░ą╗čīąĮąŠą│ąŠ ąĘąŠąĮą┤ą░.
ą» ąĮą░ ą│ąĖčéčģą░ą▒ąĄ, ą▓ ą¢ą¢
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąĪą░ą╝čüčāčüą░ą╝čŗčć
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą┐čĆąŠą│čĆą░ą╝ąĮčŗą╣ SPI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü čÅąĮą▓ 03, 2021 15:52:22 |
|
|
|
ąĢčüą╗ąĖ ąĮąĄčé ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ, ąĘąĮą░čćąĖčé, ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓čŗą▒čĆą░ąĮ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠ!!! ą£ąĮąŠą│ąŠ č湥ą│ąŠ ą┐čĆąĖčģąŠą┤ąĖą╗ąŠčüčī čćąĖčéą░čéčī, ąĮąŠ čéą░ą║ąŠą╣ ą▒čĆąĄą┤ ą▓ą┐ąĄčĆą▓čŗąĄ. 
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
sergo80zxc
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą┐čĆąŠą│čĆą░ą╝ąĮčŗą╣ SPI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü čÅąĮą▓ 03, 2021 16:06:27 |
|
| ąÆčüčéą░ą╗ ąĮą░ ą╗ą░ą┐čŗ |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą┐čĆ 04, 2014 09:34:08
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 113
ą×čéą║čāą┤ą░: ąĪą░ąĮą║čé-ą¤ąĄč鹥čĆą▒čāčĆą│
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
čéą░ą║ č鹊 ą┐ąŠąĮąĖą╝ą░čÄ čäąĖąĘąĖą║čā ą┐čĆąŠčåąĄčüčüą░, ą▓čĆąŠą┤ąĄ ąĮąĖč湥ą│ąŠ ą║ąŠčüą╝ąĖč湥čüą║ąŠą│ąŠ čéčāčé ąĮąĄčé ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╝ ąĖčüą┐ąŠą╗ąĮąĄąĮąĖąĖ... ą┐ąŠčüą╗ąĄ čüą┐ą░ą┤ą░ čüąĖą│ąĮą░ą╗ą░ čüą║ą║ ąČą┤ąĄą╝ ą┐ąŠą╗ą┐ąĄčĆąĖąŠą┤ą░ ąĄą│ąŠ ąĮčāą╗ąĄą▓ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ, ąĘą░č鹥ą╝ ą┐ąĖčłąĄą╝ ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą▒ąĖčé ą▓ ą╝ąŠčüąĖ, ąČą┤ąĄą╝ ąĄčēąĄ ą┐ąŠą╗ą┐ąĄčĆąĖąŠą┤ą░ ąĮčāą╗ąĄą▓ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ąĖ ą▓čŗčüčéą░ą▓ą╗čÅąĄą╝ čüą║ą║,čéčāčé ąČąĄ čćąĖčéą░ąĄą╝ ą┐čĆąĖčüą╗ą░ąĮąĮčŗą╣ ą▒ąĖčé čü ą╝ąĖčüąŠ ąĖ ąČą┤ąĄą╝ čāąČąĄ ą▓ąĄčüčī ą┐ąĄčĆąĖąŠą┤ ąĄą┤ąĖąĮąĖčćąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ, ąĘą░č鹥ą╝ čüą▒čĆą░čüčŗą▓ą░ąĄą╝ čüą║ą║ ą▓ ąĮąŠą╗čī - čŹč鹊 ąŠą┤ąĖąĮ čåąĖą║ą╗ ą┐čĆąĖąĄą╝ąŠą┐ąĄčĆąĄą┤ą░čćąĖ, ąĖčģ 8 , ą▓ąŠčé ąĖ ą▓čüčÅ čäčāąĮą║čåąĖčÅ ą┐čĆąĖąĄą╝ąŠą┐ąĄčĆąĄą┤ą░čćąĖ
ąĮąŠ ą▓ ąČąĄą╗ąĄąĘąĄ ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé,ą╝ąŠąČąĄčé ą│ą┤ąĄ ą║ą░ą║ą░čÅ ą│ą╗čāą┐ą░čÅ ąŠčłąĖą▒ą║ą░?
_________________
ą│ą╗ą░ąĘą░ ą▒ąŠčÅčéčüčÅ, ą░ čĆčāą║ąĖ čćč鹊 č鹊 ąĮąĄ ą┤ąĄą╗ą░čÄčé))
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Eddy_Em
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą┐čĆąŠą│čĆą░ą╝ąĮčŗą╣ SPI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü čÅąĮą▓ 03, 2021 16:44:44 |
|
| ąĪąŠą▒čāčéčŗą╗čīąĮąĖą║ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: -12
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: -25
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ąĖčÄą╗ 12, 2019 22:52:01
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2525
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą£ąĮąŠą│ąŠ č湥ą│ąŠ ą┐čĆąĖčģąŠą┤ąĖą╗ąŠčüčī čćąĖčéą░čéčī, ąĮąŠ čéą░ą║ąŠą╣ ą▒čĆąĄą┤ ą▓ą┐ąĄčĆą▓čŗąĄ. ąæčĆąĄą┤ ŌĆö čŹč鹊 ą▒čĆą░čéčī ą£ąÜ ą▒ąĄąĘ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ SPI/I2C/etc, ą░ ą┐ąŠč鹊ą╝ ą╝čāčćąĖčéčī ąĄą│ąŠ čüąŠčäč鹊ą▓čŗą╝. ą£ą░čĆą░ąĘą╝ ą║čĆąĄą┐čćą░ą╗ ąĖ ą║čĆčŗčłą░ ąŠčéčŖąĄąĘąČą░ą╗ą░!..
_________________
Linux rules! Windows must die. ąŚą┤čĆą░ą▓ąŠą╝čŗčüą╗čÅčēąĖą╣ č湥ą╗ąŠą▓ąĄą║ ą┤ąŠą▒čĆąŠą▓ąŠą╗čīąĮąŠ ą▒čāą┤ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╝ą░čüčéą┤ą░ąĄą╝ ą╗ąĖčłčī ą▓ ą┤ą▓čāčģ čüą╗čāčćą░čÅčģ: ą┐ąŠą┤ ą┤čāą╗ąŠą╝ ą░ą▓č鹊ą╝ą░čéą░ ąĖą╗ąĖ ą┐ąŠą┤ ą▓ą╗ąĖčÅąĮąĖąĄą╝ ą░ąĮą░ą╗čīąĮąŠą│ąŠ ąĘąŠąĮą┤ą░.
ą» ąĮą░ ą│ąĖčéčģą░ą▒ąĄ, ą▓ ą¢ą¢
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĪą░ą╝čüčāčüą░ą╝čŗčć
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą┐čĆąŠą│čĆą░ą╝ąĮčŗą╣ SPI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü čÅąĮą▓ 03, 2021 19:06:27 |
|
|
|
ąĮąŠ ą▓ ąČąĄą╗ąĄąĘąĄ ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé,ą╝ąŠąČąĄčé ą│ą┤ąĄ ą║ą░ą║ą░čÅ ą│ą╗čāą┐ą░čÅ ąŠčłąĖą▒ą║ą░? ąĢčüą╗ąĖ ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé, ąĘąĮą░čćąĖčé ąĄčüčéčī ąŠčłąĖą▒ą║ą░ŌĆ” ąĄčüą╗ąĖ ą┐ąŠ ą┐čĆąŠčüč鹊ą╝čā - ąĮą░ ą┐ą░ą╗čīčåą░čģ, č鹊 ąČą┤ą░čéčī čéą░ą╝ ąĮąĄą║ąŠą│ąŠŌĆ” ąĪą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ SPI ąĖą╝ąĄąĄčé 4 čĆąĄąČąĖą╝ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģŌĆ” ąĄčüą╗ąĖ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čéčī ą┐ąĄčĆą▓čŗą╣ (ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą┤ą░ąĮąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ ą┐ąŠ ą┐ąĄčĆąĄą┤ąĮąĄą╝čā čäčĆąŠąĮčéčā ąĖą╝ą┐čāą╗čīčüąŠą▓ čüąĖą│ąĮą░ą╗ą░ SCK), č鹊 ą║ąŠą│ą┤ą░ ąĮą░ ą╗ąĖąĮąĖąĖ SCK ą╗ąŠą│ 0, ąŠą▒ą░ ą£ąÜ č乊čĆą╝ąĖčĆčāčÄčé ąĮą░ čüą▓ąŠąĖčģ ą▓čŗčģąŠą┤ą░čģ ąŠč湥čĆąĄą┤ąĮąŠą╣ ą▒ąĖčé. ąÉ ą┐čĆąĖ SCK ą╗ąŠą│ 1 čćąĖčéą░čÄčé ą▓čģąŠą┤ą░, čüąŠčģčĆą░ąĮčÅčÅ ąŠč湥čĆąĄą┤ąĮąŠą╣ ą┐čĆąĖąĮčÅčéčŗą╣ ą▒ąĖčé ą▓ čüą▓ąŠąĖčģ čĆąĄą│ąĖčüčéčĆą░čģ. ąÆąŠčé čüąŠą▒čüčéą▓ąĄąĮąĮąŠ ąĖ ą▓čüčæ. ąĢčüą╗ąĖ ą┐ąŠą┤čĆąŠą▒ąĮąĄą╣ ąŠą┐ąĖčüą░čéčī ąŠą┤ąĖąĮ ąĖąĘ ą▓ą░čĆąĖą░ąĮč鹊ą▓ čŹč鹊ą│ąŠ ą┐čĆąŠčåąĄčüčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą╝ą░čüč鹥čĆąŠą╝, č鹊 ą▓čŗą│ą╗čÅą┤ąĖčé čŹč鹊 čéą░ą║: ąØą░ąĘąŠą▓čæą╝ ąŠą┤ąĖąĮ ąĖąĘ čĆą░ą▒ąŠčćąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ Loop (ą┐ąĄčéą╗čÅ) ŌĆō čŹč鹊 čĆąĄą│ąĖčüčéčĆ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĖą╣ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ ą▒ąĖčé. ąĪą╗ąĄą┤čāčÄčēąĖą╣ čĆąĄą│ąĖčüčéčĆ ąĮą░ąĘąŠą▓čæą╝ Data_SPI (ą┤ą░ąĮąĮčŗąĄ SPI) ŌĆō ą▓ čŹč鹊čé čĆąĄą│ąĖčüčéčĆ ą▒čāą┤ąĄčé ąĘą░ą│čĆčāąČą░čéčīčüčÅ ą▒ą░ą╣čé ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą▓ ąĮąĄą│ąŠ ąČąĄ ą▒čāą┤čāčé ąĘą░ą┐ąĖčüčŗą▓ą░čéčīčüčÅ ą▒ąĖčéčŗ ą┐čĆąĖ ą┐čĆąĖčæą╝ąĄ. ąóąĄą┐ąĄčĆčī ą┐ąŠ ą┐čāąĮą║čéą░ą╝: 1. ąØą░ ą▓čŗčģąŠą┤ąĄ SS č乊čĆą╝ąĖčĆčāąĄą╝ ą╗ąŠą│ 0 ŌĆō čćč鹊 čāą║ą░ąĘčŗą▓ą░ąĄčé ą▓ąĄą┤ąŠą╝ąŠą╝čā ąŠ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą║ ą┐ąĄčĆąĄą┤ą░č湥 ą┤ą░ąĮąĮčŗčģ ą┐ąŠ čłąĖąĮąĄ. 2. ąÆ čĆąĄą│ąĖčüčéčĆ Loop ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝ čćąĖčüą╗ąŠ 8. 3. ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ ą╗ąŠą│ 0 ąĮą░ ą▓čŗą▓ąŠą┤ąĄ MOSI. 4. ąĪą┤ą▓ąĖą│ą░ąĄą╝ ą▓ą╗ąĄą▓ąŠ ą┤ą░ąĮąĮčŗąĄ čĆąĄą│ąĖčüčéčĆą░ Data_SPI. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐ąĄčĆąĄą┤ą░čæą╝ čüčéą░čĆčłąĖą╝ ą▒ąĖč鹊ą╝ ą▓ą┐ąĄčĆčæą┤. 5. ą¤čĆąŠą▓ąĄčĆčÅąĄą╝ čüąŠčüč鹊čÅąĮąĖąĄ ą▒ąĖčéą░ C ą▓ čĆąĄą│ąĖčüčéčĆąĄ SREG. ąĢčüą╗ąĖ ą▒ąĖčé ąĪ čĆą░ą▓ąĄąĮ ą╗ąŠą│ 0, č鹊 ą┐ąĄčĆąĄčģąŠą┤ąĖą╝ ą║ ą┐čāąĮą║čéčā 7. ąĢčüą╗ąĖ ą▒ąĖčé ąĪ čĆą░ą▓ąĄąĮ ą╗ąŠą│ 1, č鹊 ą┐ąĄčĆąĄčģąŠą┤ąĖą╝ ą║ ą┐čāąĮą║čéčā 6. 6. ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ ą╗ąŠą│ 1 ąĮą░ ą▓čŗą▓ąŠą┤ąĄ MOSI. 7. ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ ą╗ąŠą│ 1 ąĮą░ ą▓čŗą▓ąŠą┤ąĄ SCK. 8. ąŚą░č鹥ą╝ ą┐čĆąŠą▓ąĄčĆčÅąĄą╝ ą▓čģąŠą┤ MISO. ąĢčüą╗ąĖ ąĮą░ ąĮčæą╝ ą╗ąŠą│ 0, č鹊 ą┐ąĄčĆąĄčģąŠą┤ąĖą╝ ą║ ą┐čāąĮą║čéčā 10. ąĢčüą╗ąĖ ą╗ąŠą│ 1, č鹊 ą┐ąĄčĆąĄčģąŠą┤ąĖą╝ ąĮą░ ą┐čāąĮą║čé 9. 9. ą¤čĆąĖą▒ą░ą▓ą╗čÅąĄą╝ ą║ čĆąĄą│ąĖčüčéčĆčā Data_SPI ąĄą┤ąĖąĮąĖčåčā. ąØąĄ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝ ą▓ ąĮąĄą│ąŠ 1, ą░ ąĖą╝ąĄąĮąĮąŠ ą┐čĆąĖą▒ą░ą▓ą╗čÅąĄą╝. 10. ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ ą╗ąŠą│ 0 ąĮą░ ą▓čŗą▓ąŠą┤ąĄ SCK. 11. ą×čéąĮąĖą╝ą░ąĄą╝ ąĄą┤ąĖąĮąĖčåčā ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ Loop čü ą┐čĆąŠą▓ąĄčĆą║ąŠą╣ ąĮčāą╗čÅ. ąĢčüą╗ąĖ ąĮąĄ ąĮąŠą╗čī, č鹊 ą┐ąĄčĆąĄčģąŠą┤ąĖą╝ ą▓ ą┐čāąĮą║čé 3. ąĢčüą╗ąĖ ąĮąŠą╗čī, č鹊 ą║ ą┐čāąĮą║čéčā 12. 12. ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ ą╗ąŠą│ 1 ąĮą░ ą▓čŗą▓ąŠą┤ąĄ SS. ą¤ąĄčĆąĄą┤ą░čćą░ ą▒ą░ą╣čéą░ ą┐ąŠ SPI ąĘą░ą▓ąĄčĆčłąĄąĮą░. ąś ą╝ąŠąČąĮąŠ ąĘą░ą▒čĆą░čéčī ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ Data_SPI ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗąĄ ą▓ąĄą┤ąŠą╝čŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 34 minutes 32 seconds:ą£ą░čĆą░ąĘą╝ ą║čĆąĄą┐čćą░ą╗ ąĖ ą║čĆčŗčłą░ ąŠčéčŖąĄąĘąČą░ą╗ą░!.. ąĪąŠčćčāą▓čüčéą▓čāčÄ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
sergo80zxc
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą┐čĆąŠą│čĆą░ą╝ąĮčŗą╣ SPI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü čÅąĮą▓ 03, 2021 20:04:53 |
|
| ąÆčüčéą░ą╗ ąĮą░ ą╗ą░ą┐čŗ |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą┐čĆ 04, 2014 09:34:08
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 113
ą×čéą║čāą┤ą░: ąĪą░ąĮą║čé-ą¤ąĄč鹥čĆą▒čāčĆą│
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
čģąŠč鹥ą╗ąŠčüčī ą▒čŗ ą┐ąŠąĮčÅčéčī ą▓ ą╝ąŠąĄą╝ ą║ąŠą┤ąĄ čćč鹊 ąĮąĄ čéą░ą║
_________________
ą│ą╗ą░ąĘą░ ą▒ąŠčÅčéčüčÅ, ą░ čĆčāą║ąĖ čćč鹊 č鹊 ąĮąĄ ą┤ąĄą╗ą░čÄčé))
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąÉlex
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą┐čĆąŠą│čĆą░ą╝ąĮčŗą╣ SPI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü čÅąĮą▓ 03, 2021 20:24:39 |
|
| ą£ąŠą┤ąĄčĆą░č鹊čĆ |
 |
ąÜą░čĆą╝ą░: 90
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1289
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą╝ą░čĆ 18, 2010 23:09:57
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 4510
ą×čéą║čāą┤ą░: ą¤ą╗ą░ąĮąĄčéą░ ąŚąĄą╝ą╗čÅ
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 3
ą£ąĄą┤ą░ą╗ąĖ: 1
")
|
Eddy_Em, ąĘą░ą▓čÅąĘčŗą▓ą░ą╣č鹥 čéčāčé čüą╗čÄąĮčÅą╝ąĖ ą▒čĆčŗąĘą│ą░čéčī. ąśą┤ąĖč鹥 ą┐čĆąŠčüą┐ąĖč鹥čüčī. ą”ąĖčéą░čéą░: čģąŠč鹥ą╗ąŠčüčī ą▒čŗ ą┐ąŠąĮčÅčéčī ą▓ ą╝ąŠąĄą╝ ą║ąŠą┤ąĄ čćč鹊 ąĮąĄ čéą░ą║ ąÆą░ą╝ ąČąĄ ą▓čüčæ čĆą░čüą┐ąĖčüą░ą╗ąĖ ą┐ąŠ ą┐ąŠą╗ąŠčćą║ą░ą╝, čüčĆą░ą▓ąĮąĖą▓ą░ą╣č鹥  ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 17 minutes 39 seconds: ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 17 minutes 39 seconds:ąĪąĄą╣čćą░čü ą▓ą▒ąĖą╗ ą▓ ą┐ąŠąĖčüą║ąŠą▓ąĖą║ "SPI ąĖąĮč鹥čĆč乥ą╣čü" ąĖ, ą┐ąŠ ą╝ąĖą╝ąŠ ą╝ąĮąŠąČąĄčüčéą▓ą░ čüčéą░č鹥ą╣, ąĮą░čéą║ąĮčāą╗čüčÅ ą┤ą░ąČąĄ ąĮą░ ą▓ąĖą┤ąĄąŠ https://yandex.ru/efir?stream_id=vB1hVVu6t_QE. ąÉ ąÆčŗ ą┐čĆąŠą▒ąŠą▓ą░ą╗ąĖ čŹč鹊 ą┤ąĄą╗ą░čéčī ?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĪą░ą╝čüčāčüą░ą╝čŗčć
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą┐čĆąŠą│čĆą░ą╝ąĮčŗą╣ SPI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü čÅąĮą▓ 03, 2021 20:33:56 |
|
|
|
ą▓ ą╝ąŠąĄą╝ ą║ąŠą┤ąĄ čćč鹊 ąĮąĄ čéą░ą║ ą» ąĮąĄ ąĘąĮą░čÄ čÅąĘčŗą║ą░ ąĪąĖ (ą┐ąĖčłčā ąĮą░ ą┤čĆčāą│ąŠą╝ŌĆ”), ą┐ąŠč鹊ą╝čā ąĮą░ą┐ąĖčüą░ą╗ ą┐ąŠ ą┐čāąĮą║čéą░ą╝ ą┤ą╗čÅ ą┐ąŠąĮąĖą╝ą░ąĮąĖčÅ ąĮąĄ ąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čÅąĘčŗą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Eddy_Em
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą┐čĆąŠą│čĆą░ą╝ąĮčŗą╣ SPI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü čÅąĮą▓ 03, 2021 22:05:38 |
|
| ąĪąŠą▒čāčéčŗą╗čīąĮąĖą║ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: -12
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: -25
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ąĖčÄą╗ 12, 2019 22:52:01
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2525
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąÉlex, čģą▓ą░čéąĖčé čāąČąĄ ą╝ą░čĆą░ąĘą╝ąŠą╝ ą┐ąŠą╗čŗčģą░čéčī!
ąĢčüą╗ąĖ čāąČ čéą░ą║ čģąŠč湥čéčüčÅ BDSM, čéą░ą║ čüą┤ąĄą╗ą░ą╣č鹥 ąĄą│ąŠ ą┐ąŠ-č湥ą╗ąŠą▓ąĄč湥čüą║ąĖ: čéą░ą╣ą╝ąĄčĆ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ąĖą╝ą┐čāą╗čīčüčŗ CLK ąĮą░ ąŠą┤ąĮąŠą╣ ąĮąŠą│ąĄ, ą░ ą┤ą▓čāą╝čÅ ą┤čĆčāą│ąĖą╝ąĖ čĆą░ą▒ąŠčéą░ąĄčé čü MOSI ąĖ MISO! ąÆčüąĄ čĆąĄą░ą╗ąĖąĘčāąĄčéčüčÅ č湥čĆąĄąĘ DMA "ą┐ąŠčćčéąĖ ą░ą┐ą┐ą░čĆą░čéąĮąŠ".
ąØąŠ ą▓čüąĄ čĆą░ą▓ąĮąŠ čŹč鹊 ŌĆö ąĖą┤ąĖąŠčéąĖąĘą╝ čćąĖčüč鹊ą╣ ą▓ąŠą┤čŗ! ąĢčüčéčī ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ SPI ŌĆö čéą░ą║ ąĖ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ąĄą│ąŠ. ąØąĄčé ŌĆö ą▒ąĄčĆąĖč鹥 ą£ąÜ, ą│ą┤ąĄ ąŠąĮ ąĄčüčéčī!!!
ą» ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ą░ą╗. ąĪą┐ąŠčĆčŗ čü ąÆą░ą╝ąĖ ąĘą░ą▓čÅąĘčŗą▓ą░čéčī ąĮąĄ ą▒čāą┤čā.
ą×čéą┤ąŠčģąĮąĖč鹥 ąĮąĄą┤ąĄą╗čīą║čā. ąĢčēčæ čĆą░ąĘ ą┐ąŠą▓č鹊čĆąĖč鹥 čüą▓ąŠąĖ ą▓čŗą┐ą░ą┤čŗ - ą┐ąŠą╗čāčćąĖč鹥 ą▓ąĄčćąĮčŗą╣ ą▒ą░ąĮ.
Alex.
_________________
Linux rules! Windows must die. ąŚą┤čĆą░ą▓ąŠą╝čŗčüą╗čÅčēąĖą╣ č湥ą╗ąŠą▓ąĄą║ ą┤ąŠą▒čĆąŠą▓ąŠą╗čīąĮąŠ ą▒čāą┤ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╝ą░čüčéą┤ą░ąĄą╝ ą╗ąĖčłčī ą▓ ą┤ą▓čāčģ čüą╗čāčćą░čÅčģ: ą┐ąŠą┤ ą┤čāą╗ąŠą╝ ą░ą▓č鹊ą╝ą░čéą░ ąĖą╗ąĖ ą┐ąŠą┤ ą▓ą╗ąĖčÅąĮąĖąĄą╝ ą░ąĮą░ą╗čīąĮąŠą│ąŠ ąĘąŠąĮą┤ą░.
ą» ąĮą░ ą│ąĖčéčģą░ą▒ąĄ, ą▓ ą¢ą¢
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Oxford
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą┐čĆąŠą│čĆą░ą╝ąĮčŗą╣ SPI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ čÅąĮą▓ 04, 2021 00:47:52 |
|
| ą×ą┐čŗčéąĮčŗą╣ ą║ąŠčé |
 |
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 11
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ąŠą║čé 23, 2012 13:17:25
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 823
ą×čéą║čāą┤ą░: ąÜąĖčüąĄą╗ąĄą▓čüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
sergo80zxc čÅ ą▓ą░čł ą║ąŠą┤ ą┐čĆąŠą▓ąĄčĆąĖą╗ ąĮą░ ą░ą┐ą┐ą░čĆą░čéčāčĆąĄ STM32 c VS1063. ą¤ąĄčĆąĄą┤ą░čćą░ čüąĖą│ąĮą░ą╗ąŠą▓ ą▓ąĄčĆąĮą░čÅ ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé č鹊ą╝čā čćč鹊 čā ą╝ąĄąĮčÅ ą▓čŗą┤ą░ąĄčé ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ SPI, ąĮąŠ ą║ąŠą┤ čāą┐ąŠčĆąĮąŠ ą┐čĆąŠą┤ąŠą╗ąČą░ą╗ ąĮąĄ čĆą░ą▒ąŠčéą░čéčī. ąóąŠą│ą┤ą░ čÅ ą┐čĆąŠčüč鹊 čāą▒čĆą░ą╗ ą▓čüąĄ ąĘą░ą┤ąĄčƹȹ║ąĖ ąĖąĘ ą║ąŠą┤ą░ ąĖ ą║ąŠą┤ ąĘą░čĆą░ą▒ąŠčéą░ą╗. ą£ą░ą║čĆąŠčüčŗ čüčéą░čĆčé ąĖ čüč鹊ą┐ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗, čüą▓ąŠąĄ ą┤ąĄčĆą│ą░ąĮčīąĄ. ą¤ąĄčĆąĄą┤ą░čćą░ čĆą░ą▒ąŠčéą░ąĄčé ą┐čĆą░ą▓ąĖą╗čīąĮąŠ. ą¤čĆąĖąĄą╝ ą▒ą░ą╣čéą░ ąĮąĄ ą┐čĆąŠą▓ąĄčĆčÅą╗ čéą░ą║ ą║ą░ą║ čā ą╝ąĄąĮčÅ ą┐čĆąĖąĄą╝ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗čüčÅ. 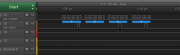
_________________
ąśąĮąČąĄąĮąĄčĆ R@D
Telegram čćą░čé: https://t.me/radiowolf ąĖą╗ąĖ ą▓ ą┐ąŠąĖčüą║ąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ @radiowolf. ąøąĖčćą║ą░:@cncoxford
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
sergo80zxc
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą┐čĆąŠą│čĆą░ą╝ąĮčŗą╣ SPI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ čÅąĮą▓ 04, 2021 01:08:48 |
|
| ąÆčüčéą░ą╗ ąĮą░ ą╗ą░ą┐čŗ |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą┐čĆ 04, 2014 09:34:08
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 113
ą×čéą║čāą┤ą░: ąĪą░ąĮą║čé-ą¤ąĄč鹥čĆą▒čāčĆą│
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
Oxford, čüą┐ą░čüąĖą▒ąŠ ąŠą│čĆąŠą╝ąĮąŠąĄ) ąĮą░ą▓ąĄčĆąĮąŠąĄ čüą║ąŠčĆąŠčüčéąĖ čüą╗ąĄą╣ą▓ą░ ąĖ ą╝ą░čüč鹥čĆą░ čĆą░ąĘąĮčŗąĄ ą▓ąŠčé ąĖ ąĮąĄ čĆą░ą▒ąŠčéą░ą╗ąŠ) ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╗) ą┐ąŠą┐čĆąŠą▒čāčÄ ą┐ąŠą┤ąŠą│ąĮą░čéčī ą┐ąŠą▒ą╗ąĖąČąĄ)
_________________
ą│ą╗ą░ąĘą░ ą▒ąŠčÅčéčüčÅ, ą░ čĆčāą║ąĖ čćč鹊 č鹊 ąĮąĄ ą┤ąĄą╗ą░čÄčé))
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Oxford
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą┐čĆąŠą│čĆą░ą╝ąĮčŗą╣ SPI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ čÅąĮą▓ 04, 2021 01:24:49 |
|
| ą×ą┐čŗčéąĮčŗą╣ ą║ąŠčé |
|
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 11
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ąŠą║čé 23, 2012 13:17:25
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 823
ą×čéą║čāą┤ą░: ąÜąĖčüąĄą╗ąĄą▓čüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąĖąĮč鹥čĆč乥ą╣čü čüąĖąĮčģčĆąŠąĮąĮčŗą╣, ą╝ą░čüč鹥čĆ ąĘą░ą┤ą░ąĄčé ą║ą╗ąŠą║.
_________________
ąśąĮąČąĄąĮąĄčĆ R@D
Telegram čćą░čé: https://t.me/radiowolf ąĖą╗ąĖ ą▓ ą┐ąŠąĖčüą║ąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ @radiowolf. ąøąĖčćą║ą░:@cncoxford
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
sergo80zxc
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą┐čĆąŠą│čĆą░ą╝ąĮčŗą╣ SPI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ čÅąĮą▓ 04, 2021 01:33:26 |
|
| ąÆčüčéą░ą╗ ąĮą░ ą╗ą░ą┐čŗ |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą┐čĆ 04, 2014 09:34:08
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 113
ą×čéą║čāą┤ą░: ąĪą░ąĮą║čé-ą¤ąĄč鹥čĆą▒čāčĆą│
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
Oxford, ą┤ą░, čüąŠą│ą╗ą░čüąĄąĮ, ą▓ čüą╗ąĄą╣ą▓ąĄ čĆą░ą┤ąĖ ą┐čĆąĖą╗ąĖčćąĖčÅ čüą║ąŠčĆąŠčüčéčī ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ)) ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░ą╗ ą┤ąĄą╗ą░ąĖ čāą▒čĆą░čéčī ąŠą┐čÅčéčī ą▓ ąČąĄą╗ąĄąĘąĄ ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé, č鹊ą╗čīą║ąŠ ą┐ąĄčĆą▓čŗą╣ ą▒ą░ą╣čé ąŠčé čüą╗ąĄą╣ą▓ą░ ą┐čĆąĖčģąŠą┤ąĖčé ąĖ ą▓čüąĄ, ą▒čāą┤čā ą║ąŠą┐ą░čéčī..)
_________________
ą│ą╗ą░ąĘą░ ą▒ąŠčÅčéčüčÅ, ą░ čĆčāą║ąĖ čćč鹊 č鹊 ąĮąĄ ą┤ąĄą╗ą░čÄčé))
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
NStorm
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą┐čĆąŠą│čĆą░ą╝ąĮčŗą╣ SPI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ čÅąĮą▓ 04, 2021 12:12:31 |
|
| ą¤ąŠčüčéą░ą▓čēąĖą║ ą▓ą░ą╗ąĄčĆčīčÅąĮą║ąĖ ą┤ą╗čÅ ąÜąŠčéą░ |
ąÜą░čĆą╝ą░: 12
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 532
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ąĖčÄą╗ 17, 2013 13:55:57
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1978
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąØąĖą║ą░ą║ąŠą│ąŠ ą┐čĆąĖą╗ąĖčćąĖčÅ ) ą”ąĖčéą░čéą░: These two bits control the SCK rate of the device configured as a Master. SPR1 and SPR0 have no effect on the Slave.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
|
ąĪčéčĆą░ąĮąĖčåą░ 1 ąĖąĘ 3
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 43 ] |
, , |
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ |
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: Varlakotam ąĖ ą│ąŠčüčéąĖ: 43 |
|
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ
|

|
|











