|
ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŁąĮą║ąŠą┤ąĄčĆą░ ąĮą░ AVR
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
 
|
ąĪčéčĆą░ąĮąĖčåą░ 2 ąĖąĘ 5
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 90 ] |
, , , , |
| ąÉą▓č鹊čĆ |
ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
Artos

|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŁąĮą║ąŠą┤ąĄčĆą░ ąĮą░ AVR  ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé čüąĄąĮ 04, 2012 14:40:49 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą╝ą░čĆ 04, 2011 13:06:42
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 108
ą×čéą║čāą┤ą░: ąŻą║čĆą░ąĖąĮą░, ąÉčģčéčŗčĆą║ą░
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ą» ąĘąĮą░čÄ čćč鹊 ą£ąÜ "čéčāą┐ąŠčĆčŗą╗ąĄąĄ" ąŠčé ą╗ąŠą│ąĖą║ąĖ. 595 ą╝ąŠąČąĄčé ą┤ąŠ 100ą╝ą│čå čĆą░ą▒ąŠčéą░čéčī.
ą£ąĄąĮčÅ ąĖąĮč鹥čĆąĄčüčāąĄčé ą║ą░ą║ą░čÅ čéą░ą║č鹊ą▓ą░čÅ ą▒čāą┤ąĄčé ąŠčé ą£ąÜ ąĄčüą╗ąĖ čéą░ą║č鹊ą▓čŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ ąĮą░ 4ą╝ą│čå.
ąĢčüą╗ąĖ ą┐ą░ą╝čÅčéčī ąĮąĄ ąĖąĘą╝ąĄąĮčÅąĄčé ą╝ąĮąĄ č鹊 AVR ąĖąĘą╝ąĄąĮčÅąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠčĆčéą░ ąĘą░ 2čéą░ą║čéą░ ąĖ ąĄčēąĄ ~ 2čéą░ą║čéą░ č鹥čĆčÅąĄčéčüčÅ ąĮą░ čåąĖą║ą╗čŗ.
ą┐ąŠ ą┐ąŠą┤čüč湥čéą░ą╝ F SPI = ~1ą╝ą│čå.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
 |
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ploop
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŁąĮą║ąŠą┤ąĄčĆą░ ąĮą░ AVR ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé čüąĄąĮ 04, 2012 14:57:54 |
|
| ą£ąŠą┤ąĄčĆą░č鹊čĆ |
 |
ąÜą░čĆą╝ą░: 68
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 424
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ąĮąŠčÅ 26, 2008 16:34:25
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 13492
ą×čéą║čāą┤ą░: ąóą░ą╝ą▒ąŠą▓čüą║ą░čÅ ąŠą▒ą╗.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
")
|
ą£ąŠą│čā ąĖąĘą╝ąĄčĆąĖčéčī ą┤ąŠą╝ą░ ąŠčé 20. ąÜąŠą┤ ąĮą░ ą░čüą╝ąĄ. ąÆąŠčé: ąĪą┐ąŠą╣ą╗ąĄčƹܹŠą┤: ;----------
; ą¤ąĄčĆąĄą║ąŠą┤ąĖčĆąŠą▓ą║ą░ ąĖ ą▓čŗą▓ąŠą┤ ą┤ą░ąĮąĮčŗčģ ąĮą░ ąĖąĮą┤ąĖą║ą░č鹊čĆčŗ
; ą¤ąĄčĆą▓čŗą╝ ąĖą┤čæčé ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▒ąĖčé ą▒ąŠą╗čīčłąŠą│ąŠ ąĖąĮą┤ąĖą║ą░č鹊čĆą░
; ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ | ąÉą┤čĆąĄčüą░ ą▓ ą▒čāč乥čĆąĄ
; |
; >----------> |
; | |
; ^----------< | 08 09 0A 0B 0C 0D
; | |
; >----------^ | 00 01 02 03 04 05 06 07
;----------
print:
; ą┐ąĄčĆą▓čŗąĄ 6 ą▒ą░ą╣čé čćąĖčéą░ąĄą╝ ą▒ąĄąĘ ąĖąĮą▓ąĄčĆčüąĖąĖ, ąŠčüčéą░ą╗čīąĮčŗąĄ ąĖąĮą▓ąĄčĆčéąĖčĆčāąĄą╝
ldi r16,14 ; ąĪč湥čéčćąĖą║ ą▒ą░ą╣čé
ldiX display_buf+14 ; ąÆ X ą░ą┤čĆąĄčü ą▒čāč乥čĆą░ ąĖąĮą┤ąĖą║ą░č鹊čĆąŠą▓ (ąĮą░ ą║ąŠąĮąĄčå)
lds r19,point_maskH ; ąæąĄčĆčæą╝ ą╝ą░čüą║ąĖ č鹊č湥ą║
lds r20,point_maskL
pr0:
ld r17,-X ; ą¦ąĖčéą░ąĄą╝ ą▒ą░ą╣čé ąĖ ą┤ąĄą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄą╝ čāą║ą░ąĘą░č鹥ą╗čī X
ldi2Z digits ; ąÆ Z čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čéą░ą▒ą╗ąĖčåčā ą┐ąĄčĆąĄą║ąŠą┤ąĖčĆąŠą▓ą║ąĖ
add16Z r17 ; ąĪą╝ąĄčēąĄąĮąĖąĄ ą┐ąŠ čéą░ą▒ą╗ąĖčåąĄ ą┐ąĄčĆąĄą║ąŠą┤ąĖčĆąŠą▓ą║ąĖ
lpm r17,Z ; ą¦ąĖčéą░ąĄą╝ "čĆąĖčüčāąĮąŠą║" čüąĖą╝ą▓ąŠą╗ą░
mov r21,r19 ; ąØą░ą║ą╗ą░ą┤čŗą▓ą░ąĄą╝ ą╝ą░čüą║čā čü č鹊čćą║ą░ą╝ąĖ
andi r21,0b10000000
or r17,r21
cpi r16,9 ; ą¤čĆąŠčłą╗ąĖ 6 čüąĖą╝ą▓ąŠą╗ąŠą▓?
brcc pr1
com r17 ; ąĢčüą╗ąĖ ą┤ą░ - ąĖąĮą▓ąĄčĆčéąĖčĆčāąĄą╝
pr1:
ldi r18,8 ; ąĪč湥čéčćąĖą║ ą▒ąĖč鹊ą▓
pr2:
cbi ds_port,ds_bit ; ąøąĖąĮąĖčÄ ą┤ą░ąĮąĮčŗčģ ą▓ 0
rol r17 ; ąæąĖčé ą▓ C
brcc pr3 ; ąĢčüą╗ąĖ ą▒ąĖčé = 0 ą┐ąĄčĆąĄą┐čĆčŗą│ąĖą▓ą░ąĄą╝
sbi ds_port,ds_bit ; ąśąĮą░č湥 ą╗ąĖąĮąĖčÄ ą▓ 1
pr3:
push_sh_cp ; ąĪą┤ą▓ąĖą│ąŠą▓čŗą╣ ąĖą╝ą┐čāą╗čīčü
dec r18
brne pr2 ; ąØąĄ ą┐čĆąŠčłą╗ąŠ 8 ą▒ąĖčé? ąŚą░čåąĖą║ą╗ąĖą▓ą░ąĄą╝
rol r20 ; ąĪą┤ą▓ąĖą│ą░ąĄą╝ ą▓čĆąĄą╝ąĄąĮąĮčŗąĄ čĆąĄą│ąĖčüčéčĆčŗ čü ą╝ą░čüą║ą░ą╝ąĖ
rol r19 ; čü čāčćčæč鹊ą╝ ą┐ąĄčĆąĄąĮąŠčüą░
dec r16 ; ąØąĄ ą┐čĆąŠčłą╗ąŠ 14 ą▒ą░ą╣čé? ąŚą░čåąĖą║ą╗ąĖą▓ą░ąĄą╝
brne pr0
push_st_cp ; ąÆčüąĄ ą┤ą░ąĮąĮčŗąĄ ą┐čĆąŠčłą╗ąĖ, ą┤čæčĆą│ą░ąĄą╝ ąĘą░čēčæą╗ą║čā
ret
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Artos
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŁąĮą║ąŠą┤ąĄčĆą░ ąĮą░ AVR ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé čüąĄąĮ 04, 2012 15:02:55 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą╝ą░čĆ 04, 2011 13:06:42
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 108
ą×čéą║čāą┤ą░: ąŻą║čĆą░ąĖąĮą░, ąÉčģčéčŗčĆą║ą░
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąöą░ą░ą░ą░ , č鹥ą╝ ą║č鹊 "ą▓ąŠą╗ąŠčćąĖčé" ą▓ ąÉąĪą£ąĄ ąĮą░ą┤ąŠ ą┐ą░ą╝čÅčéąĮąĖą║ ą┐ąŠčüčéą░ą▓ąĖčéčī  ąØąĖč湥ą│ąŠ ą║ čüąŠąČą░ą╗ąĄąĮąĖčÄ ą▓ ąĮąĄą╝ ąĮąĄ ą┐ąŠąĮąĖą╝ą░čÄ... ąØą░čćą░ą╗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčéčī ąĮąĄ ą┤ą░ą▓ąĮąŠ (ąĮąĄčüą║ąŠą╗čīą║ąŠ ą╗ąĄčé) ąĖ č鹊 čüčĆą░ąĘčā ąĮą░ ąĪąĖ. ą×ąŠąŠąŠč湥ąĮčī čéčĆčāą┤ąĮąŠ ą┤ą░ą╗ąŠčüčī ą╝ąĮąĄ. ą£ąŠąĘą│ąĖ ą▓ąĖą┤ą░čéčī ą▓ ą┤čĆčāą│čāčÄ čüč鹊čĆąŠąĮčā ąĘą░č鹊č湥ąĮčŗ. ąŚąĮą░čÄ čćč鹊 ąÉąĪą£ ąĮą░ ą┐ąŠčĆčÅą┤ąŠą║ ą▒čŗčüčéčĆąĄąĄ ąŠčé ąĪąĖ. ą¤ąŠčŹč鹊ą╝čā čüčĆą░ą▓ąĮąĄąĮąĖąĄ ąĮąĄ čüąŠą▓čüąĄą╝ ą║ąŠčĆčĆąĄą║čéąĮąŠąĄ, ąĮąŠ ą▓čüąĄ čĆą░ą▓ąĮąŠ ąŠąŠąŠč湥ąĮčī ąĖąĮč鹥čĆąĄčüąĮąŠ ąĮą░ ą║ą░ą║ąŠą╣ čćą░čüč鹊č鹥 čā ąÆą░čü čĆą░ą▒ąŠčéą░ąĄčé SPI. ąöčāą╝ą░čÄ ąĮąĄ ą▓čŗčłąĄ F/4
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ploop
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŁąĮą║ąŠą┤ąĄčĆą░ ąĮą░ AVR ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé čüąĄąĮ 04, 2012 15:11:15 |
|
| ą£ąŠą┤ąĄčĆą░č鹊čĆ |
|
ąÜą░čĆą╝ą░: 68
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 424
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ąĮąŠčÅ 26, 2008 16:34:25
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 13492
ą×čéą║čāą┤ą░: ąóą░ą╝ą▒ąŠą▓čüą║ą░čÅ ąŠą▒ą╗.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
|
ąöą░ ą┐čĆąŠčüčéčŗąĄ čåąĖą║ą╗čŗ ąŠąĮ čéą░ą║ ąČąĄ ąŠą▒čĆą░ą▒ąŠčéą░ąĄčé.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąÆčŗą▒ąĖčĆą░ąĄą╝ čüčģąĄą╝čā BMS ą┤ą╗čÅ ąĘą░čĆčÅą┤ą░ ą╗ąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗčģ (LiFePO4) ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓
ą×ą▒čÅąĘą░č鹥ą╗čīąĮčŗą╝ čāčüą╗ąŠą▓ąĖąĄą╝ ą┤ąŠą╗ą│ąŠą╣ ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ Li-FePO4-ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ EVE Energy, čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ BMS-ą╝ąĖą║čĆąŠčüčģąĄą╝. ąøąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗąĄ ąÉąÜąæ ąŠčéą╗ąĖčćą░čÄčéčüčÅ čéą░ą║ąĖą╝ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ, ą║ą░ą║ ą▓čŗčüąŠą║ą░čÅ ą╝ąĮąŠą│ąŠą║čĆą░čéąĮąŠčüčéčī čåąĖą║ą╗ąŠą▓ ąĘą░čĆčÅą┤ą░-čĆą░ąĘčĆčÅą┤ą░, ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▒čŗčüčéčĆąŠą╣ ąĘą░čĆčÅą┤ą║ąĖ, čāčüč鹊ą╣čćąĖą▓ąŠčüčéčī ą║ ą▒čāč乥čĆąĮąŠą╝čā čĆąĄąČąĖą╝čā čĆą░ą▒ąŠčéčŗ ąĖ ą┐čĆąĖąĄą╝ą╗ąĄą╝ą░čÅ čüč鹊ąĖą╝ąŠčüčéčī. ąØąŠ ą┤ą╗čÅ čŹčéąĖčģ ąÉąÜąæ ąŠč湥ąĮčī ą▓ą░ąČąĄąĮ ą║ąŠąĮčéčĆąŠą╗čī ą┐čĆąŠčåąĄčüčüą░ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░ ą┤ą╗čÅ ąĖąĘą▒ąĄą│ą░ąĮąĖčÅ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĘą░čĆčÅą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ 100% ąĘą░čĆčÅą┤ą░. ąśąĮąČąĄąĮąĄčĆčŗ ąÜą×ą£ą¤ąŁąø ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖą╗ąĖ čüą┐ąĖčüąŠą║ čéą░ą║ąĖčģ čĆąĄčłąĄąĮąĖą╣ ąŠčé čĆą░ąĘąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
ketrosi
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŁąĮą║ąŠą┤ąĄčĆą░ ąĮą░ AVR ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé čüąĄąĮ 04, 2012 15:16:34 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄą╗ 05, 2012 09:40:46
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 61
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąŻ ą╝ąĄąĮčÅ čéą░ą║ čüą┤ąĄą╗ą░ąĮąŠ (CVAVR) ąÜąŠą┤: #define Enc PINC.3 // ąÆąźą×ąö ąĄąĮą║ąŠą┤ąĄčĆą░
// INT1
interrupt [EXT_INT1 void ext_int1_isr(void) // ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé ąŁąØąÜą×ąöąĢąĀąÉ
{
if (Enc==0)
{
if (Enc==0)
{
ą▓ą░čł ą║ąŠą┤ (čā ą╝ąĄąĮčÅ if(OCR0<235) {OCR0+=1;} )
}
}
if (Enc==1)
{
if (Enc==1)
{
ą▓ą░čł ą║ąŠą┤ ( čā ą╝ąĄąĮčÅ if(OCR0>2) {OCR0-=1;})
}
}
}
菹Įą║ąŠą┤ąĄčĆ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗą╣ ąŠą┤ąĮąĖą╝ ą▓čŗą▓ąŠą┤ąŠą╝ ąĮą░ INT1, ą┤čĆčāą│ąŠą╣ ą▓čŗą▓ąŠą┤ Enc (ą┐ąĖąĮ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠą│ąŠ ą▓ą░ą╝ ą┐ąŠčĆčéą░ ąĮą░čüčéčĆąŠąĄąĮąĮčŗą╣ ąĮą░ ą▓ą▓ąŠą┤) ąĘą░čēąĖčéą░ ąŠčé ą┤čĆąĄą▒ąĄąĘą│ą░ ąĖą╝ąĄąĄčéčüčÅ ą▓ ą▓ąĖą┤ąĄ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆąŠą▓ ąĮą░ 0,1 ąĖ ąĄčēąĄ ą┐čĆąŠą│čĆą░ą╝ąĮą░čÅ. INT0 ą╝ąŠąČąĮąŠ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░čéčī ąĮą░ ą║ąĮąŠą┐ą║čā 菹Įą║ąŠą┤ąĄčĆą░ ąĖą╗ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ąĄčēąĄ ąŠą┤ąĖąĮ 菹Įą║ąŠą┤ąĄčĆ ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ.
ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ čĆą░ąĘ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī ketrosi ąĪčĆ čüąĄąĮ 05, 2012 02:25:13, ą▓čüąĄą│ąŠ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī 1 čĆą░ąĘ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
ploop
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŁąĮą║ąŠą┤ąĄčĆą░ ąĮą░ AVR ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé čüąĄąĮ 04, 2012 19:10:51 |
|
| ą£ąŠą┤ąĄčĆą░č鹊čĆ |
|
ąÜą░čĆą╝ą░: 68
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 424
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ąĮąŠčÅ 26, 2008 16:34:25
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 13492
ą×čéą║čāą┤ą░: ąóą░ą╝ą▒ąŠą▓čüą║ą░čÅ ąŠą▒ą╗.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
ąśąĘą╝ąĄčĆąĖą╗. ąśą┤čāčé ą┐ąŠčüčŗą╗ą║ąĖ ą┐ąŠ 8 ą▒ąĖčé čü ąĮąĄą▒ąŠą╗čīčłąĖą╝ąĖ ą┐ą░čāąĘą░ą╝ąĖ (ą┐ą░čāąĘą░ ąĖąĘ-ąĘą░ čāčüą╗ąŠą▓ąĖą╣ ą┤ą╗čÅ ąĖąĮą▓ąĄčĆčüąĖąĖ, čüą╝ąŠčéčĆąĖč鹥 ą║ąŠą┤). ą£ąĄąČą┤čā ą│čĆčāą┐ą┐ą░ą╝ąĖ, ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░ą┤čāčéčüčÅ 112 ą▒ąĖčé, ą┐ą░čāąĘčŗ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą▒ąŠą╗čīčłąĖąĄ (10-20 ą╝čü). ąÆčŗą│ą╗čÅą┤ąĖčé čéą░ą║ (ch1 - čéą░ą║čé, ch2 - ą┤ą░ąĮąĮčŗąĄ):  ąÆąŠčé čéą░ą║č鹊ą▓čŗą╣ ąĖą╝ą┐čāą╗čīčü ą┐ąŠą┤čĆąŠą▒ąĮąŠ, ą┤ąŠą▓ąŠą╗čīąĮąŠ ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣:  ąśąĘą╝ąĄčĆąĖą╝:  ąśą╝ą┐čāą╗čīčü čĆąŠą▓ąĮąŠ 150ąĮčü. ąŁč鹊 ą▓ą░čü ąĖąĮč鹥čĆąĄčüąŠą▓ą░ą╗ąŠ? ąĀąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ čéą░ą║: ąÜąŠą┤: sbi sh_cp_port,sh_cp_bit #ąÆčŗčüčéą░ą▓ąĖą╗ąĖ ą▒ąĖčé ąĮą░ ą┐ąŠčĆčé
nop #ą¤čĆąŠą┐čāčüčéąĖą╗ąĖ čéą░ą║čé
cbi sh_cp_port,sh_cp_bit #ąĪąĮčÅą╗ąĖ ą▒ąĖčé
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
shads
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŁąĮą║ąŠą┤ąĄčĆą░ ąĮą░ AVR ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čüąĄąĮ 05, 2012 00:46:37 |
|
| ą×ą┐čŗčéąĮčŗą╣ ą║ąŠčé |
 |
ąÜą░čĆą╝ą░: 8
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 105
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ č乥ą▓ 22, 2012 01:25:21
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 882
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą×ąŠąŠąŠąŠ..... ąØąĄ ą┤čāą╝ą░ą╗ čćč鹊 čüč鹊ą╗čīą║ąŠ ą▓ą░čĆąĖą░ąĮč鹊ą▓ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĄąĮą║ąŠą┤ąĄčĆą░. ąÉ čÅ čéčāčé ąĮą░ ą┤ąĮčÅčģ č鹊ąČąĄ ąĘą░ą╝čāčéąĖą╗ ą┐čĆąŠčåąĄą┤čāčĆą║čā, čĆąŠą▒ąĄ ąĮąŠčĆą╝ą░ą╗čīąĮąŠ..... ąĪą┐ąŠą╣ą╗ąĄčƹܹŠą┤: volatile┬Āstatic┬Āchar┬ĀEncValue┬Ā=┬Ā0;┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Āvoid┬Āencoder┬Ā(void)
{
┬Ā┬Ā┬Ā┬Āstatic┬Āunsigned┬Āchar┬ĀEncLockCntr0┬Ā=┬Ā0;┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Āstatic┬Āunsigned┬Āchar┬ĀEncLockCntr1┬Ā=┬Ā0;┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Āstatic┬Āunsigned┬Āchar┬ĀEncFlags┬Ā=┬Ā0;┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Āif┬Ā(EncoderPort┬Ā&┬ĀEncoderPin0){┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Āif┬Ā(EncLockCntr0┬Ā<┬ĀEncLockCntrMax)┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬ĀEncLockCntr0┬Ā++;┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Āelse
┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬ĀEncFlags┬Ā|=┬ĀbEncLock0;┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā}┬Ā┬Ā┬Ā┬Ā
┬Ā┬Ā┬Ā┬Āelse{┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Āif┬Ā(EncLockCntr0)┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬ĀEncLockCntr0┬Ā--;┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Āelse
┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Āif┬Ā(EncFlags┬Ā&┬ĀbEncLock0){┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā
┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬ĀEncFlags┬Ā&=┬Ā~bEncLock0;┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Āif┬Ā(~EncFlags┬Ā&┬ĀbEncLock1)┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬ĀEncValue┬Ā--;┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā
┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā}
┬Ā┬Ā┬Ā┬Ā}
┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Āif┬Ā(EncoderPort┬Ā&┬ĀEncoderPin1){┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Āif┬Ā(EncLockCntr1┬Ā<┬ĀEncLockCntrMax)┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬ĀEncLockCntr1┬Ā++;┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Āelse
┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬ĀEncFlags┬Ā|=┬ĀbEncLock1;┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā}┬Ā┬Ā┬Ā┬Ā
┬Ā┬Ā┬Ā┬Āelse{┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Āif┬Ā(EncLockCntr1)┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬ĀEncLockCntr1┬Ā--;┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Āelse
┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Āif┬Ā(EncFlags┬Ā&┬ĀbEncLock1){
┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬ĀEncFlags┬Ā&=┬Ā~bEncLock1;┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Āif┬Ā(~EncFlags┬Ā&┬ĀbEncLock0)┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬ĀEncValue┬Ā++;┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā
┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā┬Ā}
┬Ā┬Ā┬Ā┬Ā}
}┬Ā
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąÉlex
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŁąĮą║ąŠą┤ąĄčĆą░ ąĮą░ AVR ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čüąĄąĮ 05, 2012 01:56:02 |
|
| ą£ąŠą┤ąĄčĆą░č鹊čĆ |
 |
ąÜą░čĆą╝ą░: 90
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1289
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą╝ą░čĆ 18, 2010 23:09:57
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 4510
ą×čéą║čāą┤ą░: ą¤ą╗ą░ąĮąĄčéą░ ąŚąĄą╝ą╗čÅ
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
ąÆą░čĆąĖą░ąĮčé, ą║ąŠč鹊čĆčŗą╣ čÅ čĹʹ░čÄ: ąĪą┐ąŠą╣ą╗ąĄčĆenc.hąÜąŠą┤: #define ENC_A RB0
#define ENC_B RB1
extern void EncoderScan(void);
extern signed int Enc_Get_Val(void);
enc.cąÜąŠą┤: #include "enc.h"
static char EncState;
static volatile signed int EncValRet=0;
/***********************************************************/
void EncoderScan(void){
char New = (char)(ENC_A) + ((char)ENC_B<<1);
switch(EncState){
case 0:
if(New == 2) EncValRet++;
if(New == 1) EncValRet--;
break;
case 1:
if(New == 0) EncValRet++;
if(New == 3) EncValRet--;
break;
case 2:
if(New == 3) EncValRet++;
if(New == 0) EncValRet--;
break;
case 3:
if(New == 1) EncValRet++;
if(New == 2) EncValRet--;
break;
}
EncState = New; // ąŚą░ą┐ąĖčüčŗą▓ą░ąĄą╝ ąĮąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ
}
/***********************************************************/
signed int Enc_Get_Val(void){
signed int ret;
ret = EncValRet;
EncValRet=0;
return ret;
}
EncoderScan ąŠą▒čŗčćąĮąŠ ą▓čŗąĘčŗą▓ą░čÄ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ąĮąŠą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĖ čéą░ą╣ą╝ąĄčĆą░.
Enc_Get_Val ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ą║ąŠą╗-ą▓ąŠ čēąĄą╗čćą║ąŠą▓ 菹Įą║ąŠą┤ąĄčĆą░ ą┐ąŠčüą╗ąĄ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą▓čŗąĘąŠą▓ą░. ąĢčüą╗ąĖ čćąĖčüą╗ąŠ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠąĄ - ą║čĆčāčéąĖą╗ąĖ ą▓ ąŠą┤ąĮčā čüč鹊čĆąŠąĮčā, ąĄčüą╗ąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠąĄ - ą▓ ą┤čĆčāą│čāčÄ.
ąÆ čä-ąĖąĖ Enc_Get_Val čÅ ą▓čŗčĆąĄąĘą░ą╗ ąĘą░ą┐čĆąĄčé ąĖ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ąĮą░ ą▓čĆąĄą╝čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ EncValRet. ąó.ą║. ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ ą║ąŠą╝ą┐ąĖą╗ąĄą▓ čŹč鹊 ą▒čāą┤ąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī ą┐ąŠ čĆą░ąĘąĮąŠą╝čā.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ketrosi
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŁąĮą║ąŠą┤ąĄčĆą░ ąĮą░ AVR ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čüąĄąĮ 05, 2012 02:24:20 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄą╗ 05, 2012 09:40:46
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 61
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ketrosi ą┐ąĖčüą░ą╗(ą░): ąŻ ą╝ąĄąĮčÅ čéą░ą║ čüą┤ąĄą╗ą░ąĮąŠ (CVAVR) ąÜąŠą┤: #define Enc PINC.3 // ąÆąźą×ąö ąĄąĮą║ąŠą┤ąĄčĆą░
// INT1
interrupt [EXT_INT1 void ext_int1_isr(void) // ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé ąŁąØąÜą×ąöąĢąĀąÉ
{
if (Enc==0)
{
if (Enc==0)
{
ą▓ą░čł ą║ąŠą┤ (čā ą╝ąĄąĮčÅ if(OCR0<235) {OCR0+=1;} )
}
}
if (Enc==1)
{
if (Enc==1)
{
ą▓ą░čł ą║ąŠą┤ ( čā ą╝ąĄąĮčÅ if(OCR0>2) {OCR0-=1;})
}
}
}
菹Įą║ąŠą┤ąĄčĆ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗą╣ ąŠą┤ąĮąĖą╝ ą▓čŗą▓ąŠą┤ąŠą╝ ąĮą░ INT1, ą┤čĆčāą│ąŠą╣ ą▓čŗą▓ąŠą┤ Enc (ą┐ąĖąĮ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠą│ąŠ ą▓ą░ą╝ ą┐ąŠčĆčéą░ ąĮą░čüčéčĆąŠąĄąĮąĮčŗą╣ ąĮą░ ą▓ą▓ąŠą┤) ąĘą░čēąĖčéą░ ąŠčé ą┤čĆąĄą▒ąĄąĘą│ą░ ąĖą╝ąĄąĄčéčüčÅ ą▓ ą▓ąĖą┤ąĄ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆąŠą▓ ąĮą░ 0,1 ąĖ ąĄčēąĄ ą┐čĆąŠą│čĆą░ą╝ąĮą░čÅ. INT0 ą╝ąŠąČąĮąŠ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░čéčī ąĮą░ ą║ąĮąŠą┐ą║čā 菹Įą║ąŠą┤ąĄčĆą░ ąĖą╗ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ąĄčēąĄ ąŠą┤ąĖąĮ 菹Įą║ąŠą┤ąĄčĆ ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ. čéą░ą║ąČąĄ ą╝ąŠąČąĮąŠ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝ INT1 ąĄčēąĄ ąĖ ą║ąĮąŠą┐ą║čā ą┐ąŠą┤ą║ą╗čÄčćąĖą▓ ąĄąĄ č湥čĆąĄąĘ ą┤ąĖąŠą┤ ą║ąŠ ą▓čģąŠą┤čā INT1 ąĖ ą┐čĆčÅą╝čŗą╝ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄą╝ ą║ąŠ ą▓čģąŠą┤čā ąĮčāąČąĮąŠą│ąŠ ą┐ąŠčĆčéą░. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ąŠą┤ąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąŠą┤ąĖąĮ 菹Įą║ąŠą┤ąĄčĆ (ą║ąĮąŠą┐ą║čā ąĖ ą║čĆčāčéąĖą╗ą║čā), ąĖ čāą┐čĆąŠčēą░ąĄčéčüčÅ čüą░ą╝ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░. ą£ąĮąŠą│ąŠ č湥ą│ąŠ ą╝ąŠąČąĮąŠ ąŠą▒čüą╗čāąČąĖą▓ą░čéčī ą┐ąŠ ąŠą┤ąĮąŠą╝čā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÄ ąĖčüą┐ąŠą╗čīąĘčāčÅ ą┤ąĖąŠą┤čŗ ą┐ąŠ čüčģąĄą╝ąĄ ą╝ąŠąĮčéą░ąČąĮąŠąĄ ąĖą╗ąĖ. čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ , ą▓ ąĮąĄą╝ ą┐čĆąŠą▓ąĄčĆčÅčÄčéčüčÅ ą┐ąĖąĮčŗ ą┐ąŠčĆč鹊ą▓, ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠ ą║ą░ą║ąŠą╝čā ą┐čĆąŠąĖąĘąŠčłą╗ą░ čüčĆą░ą▒ąŠčéą║ą░, ą┤ą░ą╗ąĄąĄ ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ ąĮčāąČąĮčŗąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Artos
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŁąĮą║ąŠą┤ąĄčĆą░ ąĮą░ AVR ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čüąĄąĮ 05, 2012 08:17:01 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą╝ą░čĆ 04, 2011 13:06:42
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 108
ą×čéą║čāą┤ą░: ąŻą║čĆą░ąĖąĮą░, ąÉčģčéčŗčĆą║ą░
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąÜąŠą┤:
if (enc && flags_enc) // ą╗ąŠą▓ąĖą╝ ąĖą╝ą┐čāą╗čīčü
{
if(enc1) // ą▓ą┐čĆą░ą▓ąŠ
{
right();
}
else // ą▓ą╗ąĄą▓ąŠ
{
left();
}
flags_enc=0;
}
if(!(enc)) flags_enc=1; // čüą▒čĆą░čüčŗą▓ą░ąĄą╝ čäą╗ą░ą│
ąŁč鹊čé ą║ąŠą┤ ą┐ąŠą╗ąĮą░čÅ ąĖą╝ąĖčéą░čåąĖčÅ čĆą░ą▒ąŠčéčŗ 菹Įą║ąŠą┤ąĄčĆą░ čü ą▓ąĮąĄčłąĮąĖą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝. ąØąŠ ą▓ą╝ąĄčüč鹊 ą▓ąĮąĄčłąĮąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čäą╗ą░ą│. ąÜąŠą┤ ąĮąĄ č鹥čüčéąĖčĆąŠą▓ą░ą╗ , ąĮąŠ ą┤ąŠą╗ąČąĄąĮ čĆą░ą▒ąŠčéą░čéčī.
ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ čĆą░ąĘ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī Artos ąĪčĆ čüąĄąĮ 05, 2012 08:24:09, ą▓čüąĄą│ąŠ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī 1 čĆą░ąĘ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Artos
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŁąĮą║ąŠą┤ąĄčĆą░ ąĮą░ AVR ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čüąĄąĮ 05, 2012 08:20:21 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą╝ą░čĆ 04, 2011 13:06:42
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 108
ą×čéą║čāą┤ą░: ąŻą║čĆą░ąĖąĮą░, ąÉčģčéčŗčĆą║ą░
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ploop ą┐ąĖčüą░ą╗(ą░): ąśąĘą╝ąĄčĆąĖą╗. ąśą┤čāčé ą┐ąŠčüčŗą╗ą║ąĖ ą┐ąŠ 8 ą▒ąĖčé čü ąĮąĄą▒ąŠą╗čīčłąĖą╝ąĖ ą┐ą░čāąĘą░ą╝ąĖ (ą┐ą░čāąĘą░ ąĖąĘ-ąĘą░ čāčüą╗ąŠą▓ąĖą╣ ą┤ą╗čÅ ąĖąĮą▓ąĄčĆčüąĖąĖ, čüą╝ąŠčéčĆąĖč鹥 ą║ąŠą┤). ą£ąĄąČą┤čā ą│čĆčāą┐ą┐ą░ą╝ąĖ, ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░ą┤čāčéčüčÅ 112 ą▒ąĖčé, ą┐ą░čāąĘčŗ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą▒ąŠą╗čīčłąĖąĄ (10-20 ą╝čü). ąÆčŗą│ą╗čÅą┤ąĖčé čéą░ą║ (ch1 - čéą░ą║čé, ch2 - ą┤ą░ąĮąĮčŗąĄ): ąĀąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ čéą░ą║: ąÜąŠą┤: sbi sh_cp_port,sh_cp_bit #ąÆčŗčüčéą░ą▓ąĖą╗ąĖ ą▒ąĖčé ąĮą░ ą┐ąŠčĆčé
nop #ą¤čĆąŠą┐čāčüčéąĖą╗ąĖ čéą░ą║čé
cbi sh_cp_port,sh_cp_bit #ąĪąĮčÅą╗ąĖ ą▒ąĖčé
ąĪą┐ą░čüąĖą▒ąŠ ąÆą░ą╝ ą▒ąŠą╗čīčłąŠąĄ ąĘą░ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ! 160ąĮčü - čŹč鹊 ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą│ą┤ąĄ č鹊 ~3.3ą╝ąōčå (ąĖą╝ą┐čāą╗čīčü ąĖ ą┐ą░čāąĘą░)
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ploop
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŁąĮą║ąŠą┤ąĄčĆą░ ąĮą░ AVR ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čüąĄąĮ 05, 2012 08:30:43 |
|
| ą£ąŠą┤ąĄčĆą░č鹊čĆ |
|
ąÜą░čĆą╝ą░: 68
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 424
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ąĮąŠčÅ 26, 2008 16:34:25
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 13492
ą×čéą║čāą┤ą░: ąóą░ą╝ą▒ąŠą▓čüą║ą░čÅ ąŠą▒ą╗.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
|
150 ąĮčü.
ąóą░ą╝ ą▓čüčæ ą║ą░ą║ ą▓ ą░ą┐č鹥ą║ąĄ: čćą░čüč鹊čéą░ 20ą£ąōčå, 50ąĮčü - ąŠą┤ąĖąĮ čéą░ą║čé, ąĖą╝ą┐čāą╗čīčü ą┐ąŠą┤ą░čæčéčüčÅ ąĘą░ čéčĆąĖ čéą░ą║čéą░ - čāčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąŠčĆčé, nop, čüą▒čĆąŠčüąĖčéčī ą┐ąŠčĆčé.
ą¤ą░čāąĘą░ čéą░ą╝ ą│ąŠčĆą░ąĘą┤ąŠ ą┤ą╗ąĖąĮąĮąĄąĄ, čé.ą║. ąĖą┤čæčé ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą▓ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé. ąś ąŠąĮą░ ąĮąĄ ąĖą╝ąĄąĄčé ąĘąĮą░č湥ąĮąĖčÅ, čģąŠčéčī čćą░čü ą▒čāą┤ąĄčé, čĆąĄą│ąĖčüčéčĆčŗ ą▒čāą┤čāčé ąČą┤ą░čéčī.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ketrosi
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŁąĮą║ąŠą┤ąĄčĆą░ ąĮą░ AVR ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ą░ą┐čĆ 18, 2014 21:57:30 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄą╗ 05, 2012 09:40:46
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 61
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ketrosi ą┐ąĖčüą░ą╗(ą░): ketrosi ą┐ąĖčüą░ą╗(ą░): ąŻ ą╝ąĄąĮčÅ čéą░ą║ čüą┤ąĄą╗ą░ąĮąŠ (CVAVR) ąÜąŠą┤: #define Enc PINC.3 // ąÆąźą×ąö ąĄąĮą║ąŠą┤ąĄčĆą░
// INT1
interrupt [EXT_INT1 void ext_int1_isr(void) // ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé ąŁąØąÜą×ąöąĢąĀąÉ
{
if (Enc==0)
{
if (Enc==0)
{
ą▓ą░čł ą║ąŠą┤ (čā ą╝ąĄąĮčÅ if(OCR0<235) {OCR0+=1;} )
}
}
if (Enc==1)
{
if (Enc==1)
{
ą▓ą░čł ą║ąŠą┤ ( čā ą╝ąĄąĮčÅ if(OCR0>2) {OCR0-=1;})
}
}
}
菹Įą║ąŠą┤ąĄčĆ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗą╣ ąŠą┤ąĮąĖą╝ ą▓čŗą▓ąŠą┤ąŠą╝ ąĮą░ INT1, ą┤čĆčāą│ąŠą╣ ą▓čŗą▓ąŠą┤ Enc (ą┐ąĖąĮ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠą│ąŠ ą▓ą░ą╝ ą┐ąŠčĆčéą░ ąĮą░čüčéčĆąŠąĄąĮąĮčŗą╣ ąĮą░ ą▓ą▓ąŠą┤) ąĘą░čēąĖčéą░ ąŠčé ą┤čĆąĄą▒ąĄąĘą│ą░ ąĖą╝ąĄąĄčéčüčÅ ą▓ ą▓ąĖą┤ąĄ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆąŠą▓ ąĮą░ 0,1 ąĖ ąĄčēąĄ ą┐čĆąŠą│čĆą░ą╝ąĮą░čÅ. INT0 ą╝ąŠąČąĮąŠ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░čéčī ąĮą░ ą║ąĮąŠą┐ą║čā 菹Įą║ąŠą┤ąĄčĆą░ ąĖą╗ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ąĄčēąĄ ąŠą┤ąĖąĮ 菹Įą║ąŠą┤ąĄčĆ ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ. čéą░ą║ąČąĄ ą╝ąŠąČąĮąŠ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝ INT1 ąĄčēąĄ ąĖ ą║ąĮąŠą┐ą║čā ą┐ąŠą┤ą║ą╗čÄčćąĖą▓ ąĄąĄ č湥čĆąĄąĘ ą┤ąĖąŠą┤ ą║ąŠ ą▓čģąŠą┤čā INT1 ąĖ ą┐čĆčÅą╝čŗą╝ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄą╝ ą║ąŠ ą▓čģąŠą┤čā ąĮčāąČąĮąŠą│ąŠ ą┐ąŠčĆčéą░. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ąŠą┤ąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąŠą┤ąĖąĮ 菹Įą║ąŠą┤ąĄčĆ (ą║ąĮąŠą┐ą║čā ąĖ ą║čĆčāčéąĖą╗ą║čā), ąĖ čāą┐čĆąŠčēą░ąĄčéčüčÅ čüą░ą╝ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░. ą£ąĮąŠą│ąŠ č湥ą│ąŠ ą╝ąŠąČąĮąŠ ąŠą▒čüą╗čāąČąĖą▓ą░čéčī ą┐ąŠ ąŠą┤ąĮąŠą╝čā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÄ ąĖčüą┐ąŠą╗čīąĘčāčÅ ą┤ąĖąŠą┤čŗ ą┐ąŠ čüčģąĄą╝ąĄ ą╝ąŠąĮčéą░ąČąĮąŠąĄ ąĖą╗ąĖ. čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ , ą▓ ąĮąĄą╝ ą┐čĆąŠą▓ąĄčĆčÅčÄčéčüčÅ ą┐ąĖąĮčŗ ą┐ąŠčĆč鹊ą▓, ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠ ą║ą░ą║ąŠą╝čā ą┐čĆąŠąĖąĘąŠčłą╗ą░ čüčĆą░ą▒ąŠčéą║ą░, ą┤ą░ą╗ąĄąĄ ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ ąĮčāąČąĮčŗąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ. ąĖčüą┐ąŠą╗čīąĘčāčÄ čéą░ą║ąŠą╣ ą╝ąĄč鹊ą┤ ą┐ąŠčüč鹊čÅąĮąĮąŠ
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąśąĪ-ą┐čŗčéą░č鹥ą╗čī
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŁąĮą║ąŠą┤ąĄčĆą░ ąĮą░ AVR ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ą░ą┐čĆ 18, 2014 22:26:30 |
|
| ąÆčŗą╝ąŠą│ą░č鹥ą╗čī ą┐čĆąĖą┐ąŠčÅ |
 |
ąÜą░čĆą╝ą░: -2
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 105
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ąĖčÄąĮ 19, 2013 08:10:48
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 577
ą×čéą║čāą┤ą░: ą£ąŠčüą║ą▓ą░, ąĪą¤ą▒, ąøąĖą┐ąĄčåą║, ąĀčÅąĘą░ąĮčī
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąōąō  ą¦čāą▓ą░ą║, čéčŗ ąŠ č湥ą╝? )) ąóą░ą╝ ą┐ąŠčüą╗ąĄą┤ąĮąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą▓ą░ ą│ąŠą┤ą░ ąĮą░ąĘą░ą┤ ą▒čŗą╗ąŠ. ) ąĀą░ą┤ ąĘą░ č鹥ą▒čÅ, čćč鹊 čéčŗ čŹč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčłčī ą┐ąŠčüč鹊čÅąĮąĮąŠ! 
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Gerik_PP
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŁąĮą║ąŠą┤ąĄčĆą░ ąĮą░ AVR ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą╝ą░ą╣ 07, 2016 14:09:32 |
|
| ą×čéą║čĆčŗą╗ ą│ą╗ą░ąĘą░ |
 |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ąĮąŠčÅ 07, 2006 14:14:16
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 59
ą×čéą║čāą┤ą░: ą┐ąŠčü. ą¤čĆą░ą▓ą┤ąĖąĮčüą║ąĖą╣
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
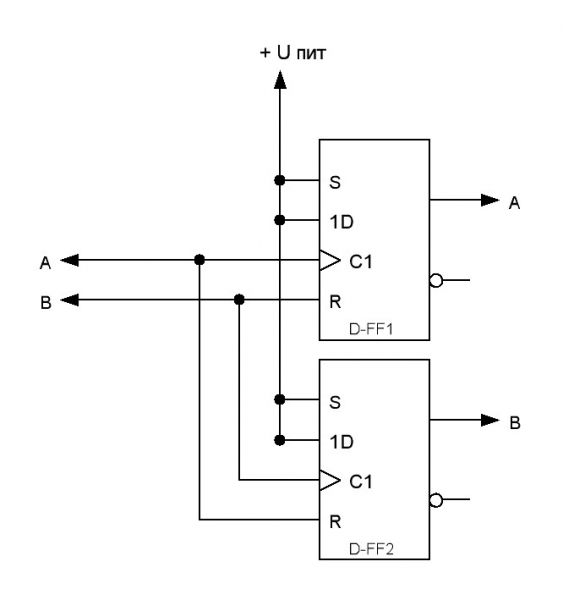
ąÆčüąĄą╝ ą┐čĆąĖą▓ąĄčé! ą¦č鹊ą▒ ąĘčĆčÅ ąĮąĄ ą╝čāčćąĖčéčüčÅ ąĮą░ ą╝ą░ą║ąĄčéą║ąŠą╣, čüą┐čĆąŠčłčā - ąĄčüą╗ąĖ ą┐ąŠą┤ą░ą▓ąĖčéčī ą┤čĆąĄą▒ąĄąĘą│ 菹Įą║ąŠą┤ąĄčĆą░ ą░ą┐ą┐ą░čĆą░čéąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ ą╗ąŠą│ąĖą║ąĖ (čüčģąĄą╝ą░ ą▓ ą┐čĆąĖčåąĄą┐ąĄ), ąĖą╝ąĄąĄčé ą╝ąĄčüč鹊 ą▒čŗčéčī čéą░ą║ąŠąĄ čĆąĄčłąĄąĮąĖąĄ?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Demiurg
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŁąĮą║ąŠą┤ąĄčĆą░ ąĮą░ AVR ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ ą╝ą░ą╣ 07, 2016 18:29:11 |
|
| ąŁč鹊 ąĮąĄ čģą▓ąŠčüčé, čŹč鹊 ą░ąĮč鹥ąĮąĮą░ |
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 141
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ąĖčÄąĮ 25, 2008 15:19:44
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1384
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Gerik_PP
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŁąĮą║ąŠą┤ąĄčĆą░ ąĮą░ AVR ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą╝ą░ą╣ 08, 2016 01:58:05 |
|
| ą×čéą║čĆčŗą╗ ą│ą╗ą░ąĘą░ |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ąĮąŠčÅ 07, 2006 14:14:16
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 59
ą×čéą║čāą┤ą░: ą┐ąŠčü. ą¤čĆą░ą▓ą┤ąĖąĮčüą║ąĖą╣
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
Demiurg ą┐ąĖčüą░ą╗(ą░): ąĪą┐ą░čüąĖą▒ąŠ! ą¤ąŠ ą▓ą░čłąĄą╝čā čĆąĖčüčāąĮą║čā ą┐ąŠą┤ąŠą▒čĆą░ą╗ ą╝ąĖą║čĆąŠčüčģąĄą╝čā CD4013, čé.ąĄ. ąĄčæ ą┐čĆčÅą╝ čéą░ą║ ąĖ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī, ą▒ąĄąĘ ą║ą░ą║ąĖčģ ą╗ąĖą▒ąŠ čĆąĄąĘąĖčüč鹊čĆąŠą▓ ąĖ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆąŠą▓? ąØąĄ čüąŠčćčéąĖč鹥 ąĘą░ čéčĆčāą┤, ą│ą╗čÅąĮčīč鹥 ą┐ąČą╗čüčéą░ čüčģąĄą╝čā. ąĮąŠąČą║ąĖ ą▓čŗčģąŠą┤ą░ čéčĆąĖą│ą│ąĄčĆąŠą▓ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖą╗? (ą▓ ą┐čĆąĖčåąĄą┐ąĄ)
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Demiurg
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŁąĮą║ąŠą┤ąĄčĆą░ ąĮą░ AVR ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą╝ą░ą╣ 08, 2016 07:37:17 |
|
| ąŁč鹊 ąĮąĄ čģą▓ąŠčüčé, čŹč鹊 ą░ąĮč鹥ąĮąĮą░ |
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 141
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ąĖčÄąĮ 25, 2008 15:19:44
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1384
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
Gerik_PP ą┐ąĖčüą░ą╗(ą░): ... ąÆčģąŠą┤čŗ ą┐ąŠą┤čéčÅąĮąĖč鹥 čĆąĄąĘąĖčüč鹊čĆą░ą╝ąĖ ąĮą░ ą╝ąĖąĮčāčü ą┐ąĖčéą░ąĮąĖčÅ. ąóą░ą║ ą║ą░ą║ ąÜą£ą×ą¤ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ. ą¤ąŠą╗ąĄą▓čŗąĄ čéčĆą░ąĮąĘąĖčüč鹊čĆčŗ čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ čŹą╗ąĄą║čéčĆąĖč湥čüą║ąĖą╝ ą┐ąŠą╗ąĄą╝, ą┐ąŠč鹊ą╝čā ą╗ąŠą▓čÅčé ą╝ą░ą╗ąĄą╣čłčāčÄ čüčéą░čéąĖą║čā. ąóą░ą║ąŠąĄ ą▓ą║ą╗čÄč湥ąĮąĖąĄ čéčĆąĖą│ą│ąĄčĆąŠą▓ čÅ ąĮą░ąĘą▓ą░ą╗ "ąĖą┤ąĄą░ą╗čīąĮčŗą╝ čéčĆąĖą│ą│ąĄčĆąŠą╝". ąśčüč鹊čĆąĖčÅ čéą░ą║ąŠą▓ą░: ą║ąŠą│ą┤ą░ čÅ ąĮą░čćą░ą╗ ąĖąĘčāčćą░čéčī čåąĖčäčĆąŠą▓čāčÄ č鹥čģąĮąĖą║čā (ą┐čĆąĖą╝ąĄčĆąĮąŠ ą╗ąĄčé 13-15 ą╝ąĮąĄ ą▒čŗą╗ąŠ, č鹊čćąĮąŠ ąĮąĄ ą┐ąŠą╝ąĮčÄ, ą▒ąŠą╗čīčłąĄ 20 ą╗ąĄčé ąĮą░ąĘą░ą┤), ą┤ąŠčłą╗ąŠ ą┤ąĄą╗ąŠ ą┤ąŠ čéčĆąĖą│ą│ąĄčĆąŠą▓. RS-čéčĆąĖą│ą│ąĄčĆčŗ ąĖąĘą▓ąĄčüčéąĮčŗ ąĘą░ą┐čĆąĄčēąĄąĮąĮčŗą╝ čüąŠčüč鹊čÅąĮąĖąĄą╝, ą║ąŠą│ą┤ą░ ąĮą░ ąŠą▒ąŠąĖčģ ą▓čģąŠą┤ą░čģ ą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī. ąś čÅ ąĮąĄ ą┐ąŠą▓ąĄčĆąĖą╗, čćč鹊 ąĮąĄą╗čīąĘčÅ čüą┤ąĄą╗ą░čéčī ąĖą┤ąĄą░ą╗čīąĮčŗą╣ čéčĆąĖą│ą│ąĄčĆ. ą» ą╗ąŠą╝ą░ą╗, ą╗ąŠą╝ą░ą╗ ą│ąŠą╗ąŠą▓čā, ą▓ą║ą╗čÄčćą░ą╗ čéą░ą║ ąĖ čüčÅą║ ą╗ąŠą│ąĖč湥čüą║ąĖąĄ 菹╗ąĄą╝ąĄąĮčéčŗ, čéą░ą║ ąĖ ąĮąĄ ą┐čĆąĖą┤čāą╝ą░ą╗. ąś ąĘą░ą▒čĆąŠčüąĖą╗ čŹč鹊 ą┤ąĄą╗ąŠ. ąöąŠ č鹊 ą╝ąŠą╝ąĄąĮčéą░, ą║ąŠą│ą┤ą░ čÅ ąĮą░čćą░ą╗ čĆą░ą▒ąŠčéą░čéčī ąĮą░ ą┐čĆąĄą┤ą┐čĆąĖčÅčéąĖąĖ. ąØčāąČąĮąŠ ą▒čŗą╗ąŠ čüą┤ąĄą╗ą░čéčī ą▒ą╗ąŠą║ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą╗čÅ čüčéą░ąĮą║ą░. ą£ąÜ č鹊ą│ą┤ą░ čÅ ąĮąĄ ąĘąĮą░ą╗. ąÆąŠą┐čĆąŠčü čüč鹊čÅą╗ ą┐čĆąŠčüč鹊. ąĪą┤ąĄą╗ą░čÄ ą▒ą╗ąŠą║ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ąŠčüčéą░čÄčüčī čĆą░ą▒ąŠčéą░čéčī. ąØąĄčé - ąĮąĄčé. ąś čéčāčé ą┐čĆąŠą▒ą╗ąĄą╝ą░ "ąĖą┤ąĄą░ą╗čīąĮčŗą╣ čéčĆąĖą│ą│ąĄčĆ" ą▓čüčéą░ą╗ą░ ą┐ąĄčĆąĄą┤ąŠ ą╝ąĮąŠą╣ čüą┐čāčüčéčÅ 10 ą╗ąĄčé ą▓ąŠ ą▓čüąĄą╣ ą║čĆą░čüąĄ. ą» ą▓čüąĄ ą╝ąŠąĘą│ąĖ ąĮą░ąĖąĘąĮą░ąĮą║čā ą▓čŗą▓ąĄčĆąĮčāą╗, ąĮąĄ ą▓čŗčģąŠą┤ąĖčé ąĖ ą▓čüąĄ čéčāčé. ąś čÅ ąŠčéą╗ąŠąČąĖą╗ čŹčéčā ą┐čĆąŠą▒ą╗ąĄą╝čā, čĆąĄčłąĖą╗ čĆą░ąĘąŠą▒čĆą░čéčīčüčÅ čü ą┤čĆčāą│ąŠą╣ ąĘą░ą┤ą░č湥ą╣. ąĀąĄą╗ąĄ ą▓čĆąĄą╝ąĄąĮąĖ. ąØą░ čĆčāą║ą░čģ ą▒čŗą╗ąĖ čĆąĄą╗ąĄ ą▓čĆąĄą╝ąĄąĮąĖ čüąŠą▓ąĄčéčüą║ąĖčģ ą▓čĆąĄą╝ąĄąĮ. ąØą░ ąÜ561ąśąĢ8. ąĀą░ąĘą▒ąĖčĆą░ą╗čüčÅ čü čŹč鹊ą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝ąŠą╣, ą▒ą░ą╗ąŠą▓ą░ą╗čüčÅ, ą┐čĆąŠą▒ąŠą▓ą░ą╗ čĆą░ąĘąĮčŗąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ. ąÜą░ą║-č鹊 čĆą░ąĘ čÅ čüąĖą┤ąĄą╗, ą┐čĆąŠą▒ąŠą▓ą░ą╗ ąŠč湥čĆąĄą┤ąĮąŠąĄ ą▓ą║ą╗čÄč湥ąĮąĖąĄ. ąś čéčāčé ą╝ąĄąĮčÅ ąŠčüąĄąĮąĖą╗ąŠ. ąĪčāčéčī čéą░ą║ąŠą▓ą░. ąĪč湥čéąĮčŗą╣ ą▓čģąŠą┤ - čüčćąĖčéą░ąĄą╝ "S" ą▓čģąŠą┤ąŠą╝. R - čéą░ą║ ąĖ ąŠčüčéą░ąĄčéčüčÅ čüą▒čĆąŠčüąŠą╝. ąĪąŠąĄą┤ąĖąĮčÅąĄą╝ ą▓čŗčģąŠą┤ 1 čüąŠ ą▓čģąŠą┤ąŠą╝ ąĘą░ą┐čĆąĄčéą░. ąÆčŗčģąŠą┤ 0 - ąĖąĮą▓ąĄčĆčüąĮčŗą╣ ą▓čŗčģąŠą┤ čéčĆąĖą│ą│ąĄčĆą░. 1 - ą┐čĆčÅą╝ąŠą╣ ą▓čŗčģąŠą┤ čéčĆąĖą│ą│ąĄčĆą░. ąóąŠ ąĄčüčéčī, čüąŠą▓ąĄčĆčłąĄąĮąĮąŠ čüą╗čāčćą░ą╣ąĮąŠ čĆąĄčłąĖą╗ čüą▓ąŠčÄ ą┐čĆąŠą▒ą╗ąĄą╝čā "ąśą┤ąĄą░ą╗čīąĮčŗą╣ čéčĆąĖą│ą│ąĄčĆ"! ą¤ąŠąĘąČąĄ čÅ ą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░ą╗ ą▓čüąĄ ąĖąĘą▓ąĄčüčéąĮčŗąĄ čéčĆąĖą│ą│ąĄčĆčŗ. ą¤ąŠą╗čāčćą░ąĄčéčüčÅ, čćč鹊 ą╝ąŠąĖ čéčĆąĖą│ą│ąĄčĆčŗ ą╝ąŠąČąĮąŠ čüą┤ąĄą╗ą░čéčī ąĮą░ D-čéčĆąĖą│ą│ąĄčĆą░čģ ąĖ JK-čéčĆąĖą│ą│ąĄčĆą░čģ. ąĪčéą░ąĮąŠą║ ą▓ ąĖč鹊ą│ąĄ čÅ čüą┤ąĄą╗ą░ą╗. ąś ąŠąĮ čāčüą┐ąĄčłąĮąŠ ąŠčéčĆą░ą▒ąŠčéą░ą╗ ą▓ čéčÅąČąĄą╗ąŠą╝, ą║čĆčāą│ą╗ąŠčüčāč鹊čćąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą╗ąĄčé. ąś čÅ ą▓ č鹊 ą▓čĆąĄą╝čÅ ąŠč湥ąĮčī čāą┤ąĖą▓ąĖą╗čüčÅ, čćč鹊 ąĮąĖą║č鹊 ąĮąĄ ą┐čĆąĖą╝ąĄąĮčÅą╗ čéą░ą║ąŠąĄ ą▓ą║ą╗čÄč湥ąĮąĖąĄ D-čéčĆąĖą│ą│ąĄčĆąŠą▓. ą£ąĮąŠą│ąĖąĄ čüčģąĄą╝čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą╝ąĮąŠą│ąŠą║čĆą░čéąĮąŠ čüąŠą║čĆą░čéąĖčéčī. ąÆ ąĖč鹊ą│ąĄ ą║ąŠą╗-ą▓ąŠ ą┐ą╗ą░čé ą│ąŠčĆą░ąĘą┤ąŠ ą╝ąĄąĮčīčłąĄ ą▓čŗčģąŠą┤ąĖą╗ąŠ ą▒čŗ. ąĢčēąĄ ą┐ąŠąĘąČąĄ, ą║ąŠą│ą┤ą░ čÅ ą┐ąŠąĘąĮą░ą║ąŠą╝ąĖą╗čüčÅ čü ą║ąŠąĮąĄčćąĮčŗą╝ąĖ ą░ą▓č鹊ą╝ą░čéą░ą╝ąĖ, ą┐ąŠąĮčÅą╗, čćč鹊 ą┐ąŠ čüčāčéąĖ, ą╝ąŠąĖ čüčģąĄą╝ą░ ąĮą░ čŹčéąĖčģ čéčĆąĖą│ą│ąĄčĆą░čģ - ą║ąŠąĮąĄčćąĮčŗąĄ ą░ą▓č鹊ą╝ą░čéčŗ. ąĪ ąČąĄčüčéą║ąŠ ąĘą░ą┤ą░ąĮąĮąŠą╣ ą╗ąŠą│ąĖą║ąŠą╣. ąæąĄąĘ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮčŗčģ čüąŠčüč鹊čÅąĮąĖą╣, ą║ą░ą║ ąĄčüą╗ąĖ ą▒čŗ čüčģąĄą╝ą░ ą▒čŗą╗ą░ čüąŠą▒čĆą░ąĮą░ ąĮą░ ąŠą▒čŗčćąĮąŠą╣ ą╗ąŠą│ąĖą║ąĄ. ąóą░ą║ą░čÅ ą▓ąŠčé ąĖčüč鹊čĆąĖčÅ...
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Gerik_PP
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŁąĮą║ąŠą┤ąĄčĆą░ ąĮą░ AVR ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ą╝ą░ą╣ 10, 2016 19:52:29 |
|
| ą×čéą║čĆčŗą╗ ą│ą╗ą░ąĘą░ |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ąĮąŠčÅ 07, 2006 14:14:16
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 59
ą×čéą║čāą┤ą░: ą┐ąŠčü. ą¤čĆą░ą▓ą┤ąĖąĮčüą║ąĖą╣
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Gerik_PP
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąŁąĮą║ąŠą┤ąĄčĆą░ ąĮą░ AVR ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ąĖčÄą╗ 22, 2016 23:21:20 |
|
| ą×čéą║čĆčŗą╗ ą│ą╗ą░ąĘą░ |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ąĮąŠčÅ 07, 2006 14:14:16
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 59
ą×čéą║čāą┤ą░: ą┐ąŠčü. ą¤čĆą░ą▓ą┤ąĖąĮčüą║ąĖą╣
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ploop ą┐ąĖčüą░ą╗(ą░): ąöą░ ą┤čĆąĄą▒ąĄąĘą│ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ąĮąŠčĆą╝ą░ą╗čīąĮąŠ ąŠčéčüąĄą║ą░ąĄčéčüčÅ. ąĢčüą╗ąĖ čüą░ą╝ąĖ ąĮąĄ ą┐čĆąĖą┤čāą╝ą░ąĄč鹥, ą▓ąŠčé ą░ą╗ą│ąŠčĆąĖčéą╝ ąøąĄąŠąĮąĖą┤ą░ ąśą▓ą░ąĮąŠą▓ąĖčćą░, čĆą░čüą║ąŠą╝ą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮ ą┤ąŠ ąĮąĄą╗čīąĘčÅ... ąĪą┐ąŠą╣ą╗ąĄčƹܹŠą┤: //----------
//ą£ąŠą┤čāą╗čī ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ 菹Įą║ąŠą┤ąĄčĆą░
//ąŁąĮą║ąŠą┤ąĄčĆ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ ą┐ąŠčĆčéą░ą╝ ENC_F1 (čäą░ąĘą░ 1) ąĖ ENC_F2 (čäą░ąĘą░ 2).
//ąöą╗čÅ ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖčÅ ą┤čĆąĄą▒ąĄąĘą│ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą░ąĮą░ą╗ąĖąĘ ą┤ą▓čāčģ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ
//čüąŠčüč鹊čÅąĮąĖą╣. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą▒ąŠą╣čéąĖčüčī ą▒ąĄąĘ ą▓čĆąĄą╝ąĄąĮąĮčŗčģ ąĘą░ą┤ąĄčƹȹĄą║.
//ążčāąĮą║čåąĖčÅ Encoder_Init() ą┤ąŠą╗ąČąĮą░ ą▓čŗąĘčŗą▓ą░čéčīčüčÅ ąŠą┤ąĖąĮ čĆą░ąĘ ą▓ ąĮą░čćą░ą╗ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ.
//ążčāąĮą║čåąĖčÅ Encoder_Exe() ą┤ąŠą╗ąČąĮą░ ą▓čŗąĘčŗą▓ą░čéčīčüčÅ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ čåąĖą║ą╗ąĄ.
//ą¤čĆąĖ ą┐ąŠą▓ąŠčĆąŠč鹥 菹Įą║ąŠą┤ąĄčĆą░ ąĮą░ čłą░ą│ ą▓ą┐čĆą░ą▓ąŠ ąĖą╗ąĖ ą▓ą╗ąĄą▓ąŠ ą▓čŗąĘčŗą▓ą░čÄčéčüčÅ čäčāąĮą║čåąĖąĖ
//To_Do_Step_Up() ąĖ To_Do_Step_Dn() čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ.
.......................
ąæčĆą░ą▓ąŠ!!! ą×čüąŠą▒ąĄąĮąĮąŠ čĆą░ą┤čāąĄčé č鹊, čćč鹊 čĆąĄčłąĄąĮąĖąĄ ą▒ąĄąĘ ą▓čĆąĄą╝ąĄąĮąĮčŗčģ ąĘą░ą┤ąĄčƹȹĄą║. ąĪą┐ą░čüąĖą▒ąŠ, ąøąĄąŠąĮąĖą┤ ąśą▓ą░ąĮąŠą▓ąĖčć!
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
|
ąĪčéčĆą░ąĮąĖčåą░ 2 ąĖąĘ 5
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 90 ] |
, , , , |
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ |
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: OKF ąĖ ą│ąŠčüčéąĖ: 43 |
|
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ
|

|
|