|
ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - RSLK ąŠčé TI (Robotic System Learning Kit)
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
 
|
ąĪčéčĆą░ąĮąĖčåą░ 3 ąĖąĘ 14
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 265 ] |
, , , , , ... |
| ąÉą▓č鹊čĆ |
ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
uldemir

|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit)  ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ čüąĄąĮ 16, 2019 18:15:04 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214
ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
")
|
|
ą×ą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ čÅ ąĘą░ą▒ą╗čāąČą┤ą░ą╗čüčÅ. ąØą░ čüą░ą╣č鹥 Pololu ą║ąŠą╝ą┐ą╗ąĄą║čé čüč鹊ąĖčé ą┤ąĄčłąĄą▓ą╗ąĄ, ą┐ąŠč鹊ą╝čā čćč鹊 čéčāą┤ą░ ąĮąĄ ą▓čģąŠą┤ąĖčé čüą░ą╝ LaunchPad. ą¤čĆąĖ čŹč鹊ą╝ ą╗ą░ąĮčćą┐ą░ą┤ą░ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠ - čéčĆąĄą▒čāąĄčéčüčÅ ąĄčēąĄ 2čģ19 ą│ąĮąĄąĘą┤ąŠ ąĖ ąČąĄą╗ą░č鹥ą╗čīąĮąŠ čü čāą┤ą╗ąĖąĮąĮčæąĮąĮčŗą╝ąĖ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ, ąĄčüą╗ąĖ ą▒čāą┤ąĄčé ąČąĄą╗ą░ąĮąĖąĄ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčīčüčÅ "čüą▓ąĄčĆčģčā".
ąØčā čŹč鹊 čéą░ą║ - ą╗ąĖčĆąĖą║ą░. ąØą░ ą▓čŗčģąŠą┤ąĮčŗčģ čÅ ą▓ąĘčÅą╗čüčÅ ąĘą░ čéą░čģąŠą╝ąĄčéčĆ... ąĖ čĆą░ąĘąŠčćą░čĆąŠą▓ą░ą╗čüčÅ. ą£ąĄč鹊ą┤ ąĘą░čģą▓ą░čéą░ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąŠ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÄ čéą░čģąŠą┤ą░čéčćąĖą║ą░ ąĮąĖą║čāą┤ą░ ąĮąĄ ą│ąŠą┤ąĖčéčüčÅ. ąĪą┤ąĄą╗ą░ą▓ ą┐ąĄčĆą▓čāčÄ čćą░čüčéčī (čüąŠą▒čüčéą▓ąĄąĮąĮąŠ čÅ ą┤ą░ą▓ąĮąŠ ąĄčæ ą▒čŗą╗ čüą┤ąĄą╗ą░ą▓čłąĖ, ąĮąŠ ąĮąĄ ąĘą░ą┐čāčüą║ą░ą╗ ąĮą░ ąČąĄą╗ąĄąĘąĄ) čāą┐čæčĆčüčÅ ą▓ ą┐čĆąŠą▒ą╗ąĄą╝čā: ą║ą░ą║ ą▓ą║ą╗čÄčćąĖčéčī ą╝ąŠč鹊čĆ ąĖ ą┐čĆąĖ čŹč鹊ą╝ ąŠčüčéą░čéčīčüčÅ ą┐ąŠą┤ ąŠčéą╗ą░ą┤čćąĖą║ąŠą╝. ą¤ąŠą║ą░ ą┤čāą╝ą░ą╗, čĆąĄčłąĖą╗ ą┤ą╗čÅ ąĮą░čćą░ą╗ą░ ą┐ąŠčéčŗą║ą░čéčīčüčÅ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░č乊ą╝ ąĖ ą║ą░čĆčéąĖąĮą║čā ąŠąĮ ą┐ąŠą║ą░ąĘą░ą╗ čāą┤čĆčāčćą░čÄčēčāčÄ. ąĀąŠą▒ąŠčé ą║čĆčāčéąĖą╗ ą║ąŠą╗čæčüą░ą╝ąĖ ą▓ ą▓ąŠąĘą┤čāčģąĄ, ą░ ą║ą░čĆčéąĖąĮą║ą░ ąĮą░ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░č乥 ą┤čĆąŠąČą░ą╗ą░. ąó.ąĄ. ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą╝ąĄąČą┤čā čäčĆąŠąĮčéą░ą╝ąĖ ą┐ąŠčüč鹊čÅąĮąĮąŠ ą║ąŠą╗ąĄą▒ą░ą╗ą░čüčī. ą×čéč湥ą│ąŠ čŹč鹊 čéą░ą║, ąĖą╗ąĖ ąĮąĄčĆą░ą▓ąĮąŠą╝ąĄčĆąĮąŠčüčéčī ą▓čĆą░čēąĄąĮąĖčÅ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ, ąĖą╗ąĖ ąĮąĄčĆą░ą▓ąĮąŠą╝ąĄčĆąĮąŠ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą┐ąŠą╗čÄčüą░ ąĮą░ ą╝ą░ą│ąĮąĖčéąĮąŠą╝ ą┤ąĖčüą║ąĄ (ąĖą╗ąĖ ą┤ąĖčüą║ ąĮąĄą╝ąĮąŠą│ąŠ ą║ąŠčüąĖčé) ą┐ąŠą║ą░ ąĮąĄ ą┐ąŠąĮčÅą╗. ąØąŠ čäą░ą║čé ąŠčüčéą░čæčéčüčÅ čéą░ą║ąŠą╣, čćč鹊 ą▓čüąĄ ąĖąĘą╝ąĄčĆąĄąĮąĮčŗąĄ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ąĖąĘ-ąĘą░ čŹč鹊ą│ąŠ čĆą░ąĘąĮčŗąĄ. ą¦č鹊 ąĖ ą┐ąŠą┤čéą▓ąĄčĆą┤ąĖą╗ąĖ ą┤ą░ą╗čīąĮąĄą╣čłąĖąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ.
ą¦čāčéčī ą┐ąŠąĘąČąĄ, čĆą░ąĘąŠą▒čĆą░ą▓čłąĖčüčī, čćč鹊 ąĮčāąČąĮąŠ ą▓ą║ą╗čÄčćąĖčéčī ąĖ čćč鹊 - ąŠčéą║ą╗čÄčćąĖčéčī, ą┐ąŠą╗čāčćą╗ ą║ąŠąĮčüčéčĆčāą║čåąĖčÄ, ą║ąŠč鹊čĆčāčÄ čÅ ą╝ąŠą│čā čĆą░ąĘąŠą╝ ąĖ ą┤ą▓ąĖą│ą░čéčī, ąĖ ąŠčéą╗ą░ąČąĖą▓ą░čéčī. ąØą░čćą░ą╗ ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą╗ą░ą▒čā, ą│ą┤ąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ čüą▒ąŠčĆ ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖ čĆą░ąĘąĮčŗčģ čüą║ąŠčĆąŠčüčéčÅčģ ą▓čĆą░čēąĄąĮąĖčÅ ą║ąŠą╗čæčü. ąĪąĮą░čćą░ą╗ą░ ą┐ąŠą╗čāčćąĖą╗ ą┤ąĖą║ąĖąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ. ążčāąĮą║čåąĖčÅ čüą▒ąŠčĆą░ ą┤ą░ąĮąĮčŗčģ čĆą░ąĘ ą▓ 10ą╝čü ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą▓ ą▒čāč乥čĆ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĖąŠą┤ą░, čüą║ąŠčĆąŠčüčéąĖ (čüą║ąŠčĆąŠčüčéčī = 2000000/ą┐ąĄčĆąĖąŠą┤ - čüčéčĆą░ąĮąĮąŠ, čćč鹊 ą┐ąĄčĆąĖąŠą┤ ąĮą░ 0 ąĮąĄ ą┐čĆąŠą▓ąĄčĆčÅąĄčéčüčÅ, ą╝ąŠąČąĮąŠ čüą┐ąŠą║ąŠą╣ąĮąŠ ą▓ GPF ą▓ą╗ąĄč鹥čéčī) ąĖ ą┐ąŠč鹊ą╝ ą┤ąŠą▒ą░ą▓ąĖą╗ ąĄčēąĄ ąŠą┤ąĖąĮ ą┐ą░čĆą░ą╝ąĄčéčĆ. ąóą░ą║ ą▓ąŠčé čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą║ąŠą│ą┤ą░ ą┤ą▓ąĖą│ą░č鹥ą╗čī ą┐ąĄčĆąĄčģąŠą┤ąĖą╗ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ ą┐ąŠą║ąŠčÅ ą║ 25% ą╝ąŠčēąĮąŠčüčéąĖ ą▒čŗą╗ąĖ "ą▓čüą┐ą╗ąĄčüą║ąĖ". ą¤čĆąĖč湥ą╝ ą▓čüą┐ą╗ąĄčüą║ąĖ ą▒čŗą╗ąĖ ą║ą░ą║ ą▓ą▓ąĄčĆčģ - ąĘąĮą░čćąĖčé čćč鹊 ąĘą░ ą┐ąĄčĆąĖąŠą┤ ąŠą┐čĆąŠčüą░ ąĮąĄ ą▒čŗą╗ąŠ ąĮąĖ ąŠą┤ąĮąŠą│ąŠ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ ąĘą░čģą▓ą░čéą░, čéą░ą║ ąĖ ą▓ąĮąĖąĘ! ąĪąŠ ą▓č鹊čĆčŗą╝ ą╝ąŠą╝ąĄąĮč鹊ą╝ ą┐ąŠąĮčÅčéąĮąŠ. ąóą░ą║ ą║ą░ą║ čéą░ą╝ ą┐ąĄčĆąĖąŠą┤ ą▓čŗčćąĖčüą╗čÅčéčüčÅ "čåąĖą║ą╗ąĖč湥čüą║ąĖ", č鹊 ąĄčüą╗ąĖ ą┐čĆąĄą┤čŗą┤čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą▒čŗą╗ąŠ 0xFFFF, ą░ čüą╗ąĄą┤čāčÄčēąĄąĄ 0x0001, č鹊 ą┐ąŠą╗čāčćą░ąĄčéčüčÅ, čćč鹊 ą┐ąĄčĆąĖąŠą┤ - 2. ąØąŠ čŹč鹊 ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, čćč鹊 ąĘą░ ą▓čĆąĄą╝čÅ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ ąĘą░čģą▓ą░čéą░ čüč湥čéčćąĖą║ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ čĆą░ąĘ ą┐čĆąŠčłąĄą╗ č湥čĆąĄąĘ 0. ąÉ ąĄčüą╗ąĖ ą┤ą▓ą░ ąĖ ą▒ąŠą╗ąĄąĄ? ąóą░ą║ ąĖ ą▒čŗą╗ąŠ. ąÜąŠą╗ąĄčüąŠ ą▓čĆą░čēą░ą╗ąŠčüčī ąĄčēčæ ąĮą░čüč鹊ą╗čīą║ąŠ ą╝ąĄą┤ą╗ąĄąĮąĮąŠ, čćč鹊 ą┐ąĄčĆąĖąŠą┤ ą▒čŗą╗ ą▒ąŠą╗čīčłąĄ 5.64ą╝čü ąĖ čüč湥čéčćąĖą║ čāčüą┐ąĄą▓ą░ą╗ ą┤ą▓ą░ čĆą░ąĘą░ ą┐ąĄčĆąĄą╣čéąĖ č湥čĆąĄąĘ 0, ą░ ą┐čĆąŠčüčéą░čÅ čĆą░ąĘąĮąĖčåą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ą╗ą░ čüą║ąŠčĆąŠčüčéčī, ą┤ą░ąČąĄ ą▓čŗčłąĄ, č湥ą╝ ą┐čĆąĖ 75% ą╝ąŠčēąĮąŠčüčéąĖ (ą▓ č鹥čüč鹥 ą┤ą▓ąĖą│ą░č鹥ą╗čī ą║čĆčāčéąĖą╗čüčÅ ą┐ąŠ 1 čüąĄą║čāąĮą┤ąĄ ąĮą░ 25%, 50%, 75%, 50%, 25% ąĖ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ą╗čüčÅ). ąó.ąĄ. ą┐ąŠą╗čāčćą░ąĄčéčüčÅ, čćč鹊 ąĮčāąČąĮąŠ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ čāčüą╗ąŠąČąĮčÅčéčī? ąĪ ą┐ąĄčĆą▓ąŠą╣ ą┐čĆąŠą▒ą╗ąĄą╝ąŠą╣ ąŠą║ą░ąĘą░ą╗ąŠčüčī čéą░ą║, čćč鹊 ąĄčæ ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗą╗ąŠ čüą╗čāčćąĖčéčīčüčÅ - ą┐čĆąĖ čüą▒ąŠčĆąĄ ą┤ą░ąĮąĮčŗčģ čü ąĖąĮč鹥čĆą▓ą░ą╗ąŠą╝ ą▓ 10ą╝čü, ą░ ą┐ąĄčĆąĖąŠą┤ ą┐čĆąĖ č鹥čģ ąŠą▒ąŠčĆąŠč鹊ą░čģ - ą┐ąŠčĆčÅą┤ą║ą░ 1ą╝čü. ąØąŠ ąŠą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 ą║ąŠą│ą┤ą░ čÅ ąĮą░čćą░ą╗ ą┐ąĖčüą░čéčī čĆąŠą▒ąŠčéą░ ą┤ą╗čÅ ą╗ą░ą▒ąĖčĆąĖąĮčéą░, čÅ ąĮą░čćą░ą╗ ą┐ąĄčĆąĄą┤ąĄą╗čŗą▓ą░čéčī čŹčéąĖ čäčāąĮą║čåąĖąĖ ą┐ąŠą┤ čüąĄą▒čÅ, ą░ ąŠąĮąĖ, ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ ąŠą▒čēąĖąĄ ą▓ąŠ ą▓čüčæą╝ čĆą░ą▒ąŠč湥ą╝ ą┐ąŠą╗ąĄ ą┐čĆąŠąĄą║č鹊ą▓. ąś čüą╗ąĄą┤čāčÄčēąĖąĄ ą╗ą░ą▒čŗ čā ą╝ąĄąĮčÅ "ą┐ąŠą╗ąŠą╝ą░ą╗ąĖčüčī". ą¤ąŠčŹč鹊ą╝čā čÅ čĆąĄčłąĖą╗ čĆąŠą▒ąŠčéą░ čāčéą░čēąĖčéčī ą┐čĆąŠčćčī ąĖąĘ CCS. ąØčā ąĖ ąŠą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 ą▓ąŠąĘą▓čĆą░čēą░čÅ ąĮą░ ą╝ąĄčüč鹊, ąĮąĄ ą▓čüčæ ąĖčüą┐čĆą░ą▓ąĖą╗ ą▓ ąĖčüčģąŠą┤ąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ. ąóą░ą║ čćč鹊 ąŠą┐čĆąŠčü ąŠą║ą░ąĘą░ą╗čüčÅ ą│ąŠčĆą░ąĘą┤ąŠ čćą░čēąĄ, č湥ą╝ 10ą╝čü. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ ą║ą░ą║ ą▓čüąĄ čģą▓ąŠčüčéčŗ ąĮą░čłąĄą╗ ąĖ ą▓ąĄčĆąĮčāą╗ ąĮą░ ą╝ąĄčüč鹊 - čŹčéąĖ "ą▓čŗą┐ą░ą┤čŗ" ą▓ą▓ąĄčĆčģ ąĖčüč湥ąĘą╗ąĖ.
ąöą░ą╗ąĄąĄ, čÅ čĆąĄčłąĖą╗ čüą┤ąĄą╗ą░čéčī čāč湥čé ą┐čĆąŠą╣ą┤ąĄąĮąĮąŠą│ąŠ čĆą░čüčüč鹊čÅąĮąĖčÅ. ąŁč鹊 ą┐čĆąŠčüč鹊. ąØą░ ą║ą░ąČą┤čŗą╣ ąĖą╝ą┐čāą╗čīčü ąĮą░ą┤ąŠ ą┐čĆąĖą▒ą░ą▓ą╗čÅčéčī ąĖą╗ąĖ čāą▒ą░ą▓ą╗čÅčéčī ą┤ąĖčüčéą░ąĮčåąĖčÄ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čĆą░čēąĄąĮąĖčÅ. ąÆ ąĘą░ą┤ą░ąĮąĖąĖ čüą║ą░ąĘą░ąĮąŠ ą▒čŗą╗ąŠ ą┐čĆąĖą▒ą░ą▓ą╗čÅčéčī 1, ąĮąŠ ą╝ąĮąĄ ą┐ąŠą┤čāą╝ą░ą╗ąŠčüčī, čćč鹊 ą┐čĆą░ą║čéąĖčćąĮąĄąĄ čüčĆą░ąĘčā čüčćąĖčéą░čéčī ą▓ ąĮąŠčĆą╝ą░ą╗čīąĮčŗčģ ąĄą┤ąĖąĮąĖčåą░čģ. ąŁąĮą║ąŠą┤ąĄčĆ ą┤ą░čæčé 360 ąĖą╝ą┐čāą╗čīčüąŠą▓ ąĮą░ ąŠą▒ąŠčĆąŠčé ą║ąŠą╗ąĄčüą░, čü čāč湥č鹊ą╝ čĆąĄą┤čāą║č鹊čĆą░. ąöąĖą░ą╝ąĄčéčĆ ą║ąŠą╗ąĄčüą░ ą│ą┤ąĄ-č鹊 69.5-70ą╝ą╝. ąØčā čÅ čéčāčé ą┐ąŠą┐čŗčéčüčÅ ąŠą║čĆčāą│ą╗ąĖčéčī, čüą░ą╝ąŠąĄ ą▒ą╗ąĖąĘą║ąŠąĄ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī čüčćąĖčéą░čéčī, čćč鹊 ąĮą░ 1 ąĖą╝ą┐čāą╗čīčü čĆąŠą▒ąŠčé ą┐čĆąŠčģąŠą┤ąĖčé 0.61ą╝ą╝. ąŚą░ą┐čāčüčéąĖą╗ čŹč鹊čé ą┐čÅčéąĖčüąĄą║čāąĮą┤ąĮčŗą╣ č鹥čüčé - ąŠčéč湥čé ą┐ąŠą║ą░ąĘą░ą╗, čćč鹊 čĆąŠą▒ąŠčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗą╗ ą┐čĆąŠąĄčģą░čéčī 4 ą╝ąĄčéčĆą░. ąØąŠ ą┐ąŠčüčéą░ą▓ąĖą▓ ąĮą░ ą┐ąŠą╗, ąŠąĮ čÅą▓ąĮąŠ čüč鹊ą╗čīą║ąŠ ąĮąĄ ą┐čĆąŠąĄąĘąČą░ą╗. ąÆąĘčÅą╗ čĆčāą╗ąĄčéą║čā - ą▓čüąĄą│ąŠ 2 ą╝ąĄčéčĆą░. ąōą┤ąĄ-č鹊 čÅ ąŠčłąĖą▒čüčÅ. ą×ą║ą░ąĘą░ą╗ąŠčüčī ą▓čüčæ ąŠč湥ąĮčī ą┐čĆąŠčüč鹊. ąÜąŠą┐ąĖčĆčāčÅ čŹč鹊čé ą║ąŠą┤ ą┤ą╗čÅ ą▓č鹊čĆąŠą│ąŠ ą║ąŠą╗ąĄčüą░, ą┐ąŠčĆčé ąŠą┐čĆą░čłąĖą▓ą░ąĄą╝čŗą╣ ą┐ąŠą╝ąĄąĮčÅą╗, ą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ - ąĮąĄčé. ąÆąŠčé ąĖ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī, čćč鹊 ąĮą░čüčćąĖčéą░ą╗ąŠ ą▓ ą┤ą▓ą░ čĆą░ąĘą░ ą▒ąŠą╗čīčłąĄ.
ą£ąĮąĄ ą▓ąŠčé ą┐ąŠč湥ą╝čā-č鹊 ą┤čāą╝ą░ąĄčéčüčÅ, čćč鹊 ąĖąĘą╝ąĄčĆčÅčéčī ą┐ąĄčĆąĖąŠą┤ - ąĮąĄ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ. ą¤čĆą░ą▓ąĖą╗čīąĮąŠ čüčćąĖčéą░čéčī čĆą░čüčüč鹊čÅąĮąĖąĄ ąĖ ąĖąĘ ąĮąĄą│ąŠ ą╝ąŠąČąĮąŠ ą╗ąĄą│ą║ąŠ ą┐ąŠą╗čāčćąĖčéčī čüą║ąŠčĆąŠčüčéčī. ą¤čĆąĖč湥ą╝ ą▒ąĄąĘ čĆąĖčüą║ą░ čüą┤ąĄą╗ą░čéčī ą┤ąĄą╗ąĄąĮąĖąĄ ąĮą░ 0. ąś ą┤ą╗čÅ čāčüčĆąĄą┤ąĮąĄąĮąĖčÅ ąĮąĄ ąĮčāąČąĮąŠ ąĘą░ąĮąĖą╝ą░čéčīčüčÅ čäąĖą╗čīčéčĆąŠą▓ą░ąĮąĖąĄą╝, čāčüčĆąĄą┤ąĮąĄąĮąĖąĄą╝, čéą░ą║ ą║ą░ą║ ąĄčüą╗ąĖ ą┐čĆąŠą╣ą┤ąĄąĮąĮąŠąĄ čĆą░čüčüč鹊čÅąĮąĖąĄ ą┐ąŠą┤ąĄą╗ąĖčéčī ąĮą░ ą▓čĆąĄą╝čÅ ą╝čŗ čéą░ą║ ąĖ čéą░ą║ ą┐ąŠą╗čāčćąĖą╝ čüčĆąĄą┤ąĮčÄčÄ čüą║ąŠčĆąŠčüčéčī. ąÉ ąĄčüą╗ąĖ čéą░ą║, č鹊 ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ čüč湥čéčćąĖą║ą░ ą▓ čéą░ą║ąŠą╝ ą▓ąĖą┤ąĄ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čŹč鹊ą│ąŠ 菹Įą║ąŠą┤ąĄčĆą░ čüąŠą▓ąĄčĆčłąĄąĮąĮąŠ ąĮąĄ ąĮčāąČąĮąŠ. ąÉ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüč湥čéčćąĖą║ ą║ą░ą║ ą║ą▓ą░ą┤čĆą░čéčāčĆąĮčŗą╣, ą║ą░ą║ ą▓ STM32 ąĘą┤ąĄčüčī ąĮąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ. ąöą╗čÅ čāč湥čéą░ ąĖą╝ąĄąĮąĮąŠ čĆą░čüčüč鹊čÅąĮąĖčÅ, ą┤ąŠčüčéą░č鹊čćąĮąŠ ą┐ąŠčĆčéčŗ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ąĮą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ. ąöčāą╝ą░čÄ, ą▓ čĆąŠą▒ąŠč鹥 čéą░ą║ ąĖ čüą┤ąĄą╗ą░čÄ. ąÉ ą┐ąŠą║ą░ ąĮą░ą┤ąŠ ąĄčēąĄ ą┐ąŠąĖą│čĆą░čéčīčüčÅ čü čŹč鹊ą╣ ą╗ą░ą▒ąŠą╣ ąĖ ą┐ąĄčĆąĄą╣čéąĖ ą║ 17 - čéą░ą╝ čāąČąĄ ąĮą░ ąŠčüąĮąŠą▓ąĄ čŹč鹊ą│ąŠ 菹Įą║ąŠą┤ąĄčĆą░ ą▒čāą┤ąĄčé ą¤ąśąö-čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖąĄ.
_________________
ąÉ ą╗čÄą┤ąĖ ą┐ąŠčüą╝ąŠčéčĆčÅčé ąĖ čüą║ą░ąČčāčé: "ąĪąŠą▒ą░ą║ąĖ ą╗ąĄčéčÅčé. ąÆąŠčé ąĖ ąŠčüąĄąĮčī."
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
 |
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Ser60
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ąŠą║čé 06, 2019 00:26:51 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 74
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 607
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą┤ąĄą║ 24, 2008 09:58:58
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3715
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 3
")
")
")
|
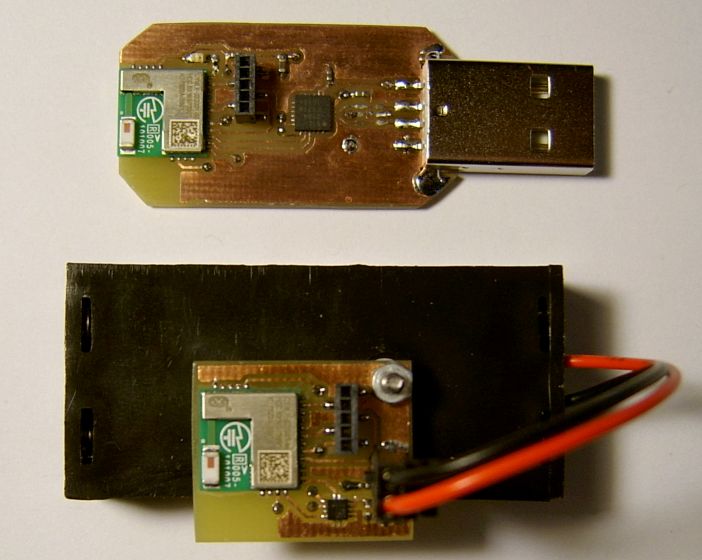
ąØąĄ ąĘąĮą░čÄ ąĮą░čüčćčæčé HC11 (čā ąĮąĖčģ čüą║ąŠčĆąŠčüčéčī ą▓čŗą┤ą░čćąĖ ą▓ ą┐ąŠčĆčé 9600), ąĮąŠčĆą╝ą░ą╗čīąĮčŗąĄ BLE ą╝ąŠą┤čāą╗ąĖ ą▓ąĄčĆčüąĖąĖ 4.2 ą┐čĆąŠą║ą░čćąĖą▓ą░čÄčé ą┐ąŠčĆčÅą┤ą║ą░ 300ąÜ/čüąĄą║, ą░ 5.1 - čāąČąĄ ą▒ąŠą╗ąĄąĄ ą╝ąĄą│ą░. ąÆ ą┐ą╗ą░ąĮąĄ ą┐čĆąĖčæą╝ą░ ą╝ąĮąŠą│ąŠąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé čüą╝ą░čĆčé ą┤ąĄą▓ą░ą╣čüą░. ąØą░ čüąĄą│ąŠą┤ąĮčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ iOS ą│ąŠčĆą░ąĘą┤ąŠ ą╝ąĄą┤ą╗ąĄąĮąĮąĄąĄ č湥ą╝ Android. ą» čüą┤ąĄą╗ą░ą╗-ą▒čŗ ą┤ąŠąĮą│ą╗ ą║ ą║ąŠą╝ą┐čā, ą┐ąĄčĆąĄą▓ąŠą┤čÅčēąĖą╣ BLE ą▓ UART ąĖą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ ą│ąŠč鹊ą▓čŗąĄ BLE-UART ąĖą╗ąĖ WiFi-UART ą║ąŠąĮą▓ąĄčĆč鹥čĆčŗ. ąÆąŠčé, ą║ čüą╗ąŠą▓čā, ą╝ąŠą╣ ą┤ąŠąĮą│ą╗ ąĮą░ čüą░ą╣ą┐čĆąŠą▓čüą║ąĖčģ BLE čćąĖą┐ą░čģ. ąØąĖąČąĮčÅčÅ ą┐ą╗ą░čéą║ą░ ą┐ąĄčĆąĄą┤ą░čæčé ą┤ą░ąĮąĮčŗąĄ čü ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆą░ ą║ą░ąČą┤čŗąĄ 0.1 čüąĄą║ ąĖ ą┐ąĄčĆąĄą┤ą░čæčé č湥čĆąĄąĘ ą┤ąŠąĮą│ą╗ ą▓ UART ąĮą░ čüą║ąŠčĆąŠčüčéąĖ 9600 (ą▒ąŠą╗čīčłąĄ ąĮąĄ ąĮčāąČąĮąŠ ą▒čŗą╗ąŠ). ą¤ąĄčĆąĄą┤ą░čéčćąĖą║ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄčé ąŠą║ąŠą╗ąŠ 190 ą╝ą║ąÉ ą▓ čüčĆąĄą┤ąĮąĄą╝. ąöąĄą╗ą░ą╗ čŹčéčā ąĘą░ą│ąŠč鹊ą▓ą║čā ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ą▒ąĄąĘą║ąŠąĮčéą░ą║čéąĮąŠą╣ čüąĖčüč鹥ą╝čŗ čĆąĄą│ąĖčüčéčĆą░čåąĖąĖ ą┐ąŠą║ą╗čæą▓ą║ąĖ ą┤ą╗čÅ čĆčŗą▒ą░ą║ąŠą▓. ąØąŠ ą▓ ą┤ąĄą╗ąŠ ąĮąĄ ą┐ąŠčłą╗ąŠ - ą╝ąŠą╣ ą║ąŠą╝ą┐ą░ąĮčīąŠąĮ ąĮąĄąŠąČąĖą┤ą░ąĮąĮąŠ čāčłąĄą╗ ąĖąĘ ąČąĖąĘąĮąĖ, ą░ ą▒ąĄąĘ ąĮąĄą│ąŠ čāąČąĄ ąĮąĄ č鹊...  ąØą░ čŹč鹊ą╣ ąĮąĄą┤ąĄą╗ąĄ ąĄąĘą┤ąĖą╗ ąĮą░ ąöąĄąĮčī ąóąĄčģąĮąŠą╗ąŠą│ąĖąĖ ąóąś ąĖ ą▓ąĄčĆąĮčāą╗čüčÅ ą▓ ą┐ąŠą╗ąĮąŠą╝ čĆą░ąĘąŠčćą░čĆąŠą▓ą░ąĮąĖąĖ. ą¤čĆąĄą┤čüčéą░ą▓ąĖč鹥ą╗čī čüą║ą░ąĘą░ą╗, čćč鹊 ąóąś čāąČąĄ ąĮąĄ ą┐ą╗ą░ąĮąĖčĆčāąĄčé ą▓čŗą┐čāčüą║ MSP432 ą▓ ą╝ąĄąĮąĄąĄ ąĮąŠą│ą░čüčéčŗčģ ą║ąŠčĆą┐čāčüą░čģ ąĖ ą▓ąŠąŠą▒čēąĄ ąŠąĮąĖ čāąČąĄ ą┐čĆąŠąĄą║čéąĖčĆčāčÄčé ąĮąŠą▓ąŠąĄ čüąĄą╝ąĄą╣čüčéą▓ąŠ (ą║ą░ą║ąŠąĄ, čüą║ą░ąĘą░čéčī ąĮąĄ ą╝ąŠą│ - čüąĄą║čĆąĄčé). ą¤ąŠčģąŠąČąĄ, 432-ąĄ ą▓ ąĮą░čĆąŠą┤ ąĮąĄ ą┐ąŠčłą╗ąĖ (čŹč鹊 čÅ čāąČąĄ čéą░ą║ ą┤ąŠą╝čŗčüą╗ąĖą▓ą░čÄ). ąŚą░č鹊 ąóąś ąĖą┤čæčé ą▓ą┐ąĄčĆčæą┤ 7-ą╝ąĖą╗čīąĮčŗą╝ąĖ čłą░ą│ą░ą╝ąĖ ą▓ ą┐ą╗ą░ąĮąĄ ą▒ąĄąĘą┐čĆąŠą▓ąŠą┤ąĮčŗčģ č鹥čģąĮąŠą╗ąŠą│ąĖą╣. ąÜą░ąČą┤čŗą╣ ą│ąŠą┤ ą┐ąŠčÅą▓ą╗čÅčÄčéčüčÅ čāčüąŠą▓ąĄčĆčłąĄąĮčüčéą▓ąŠą▓ą░ąĮąĮčŗąĄ ą╝ąŠą┤ąĄą╗ąĖ ąĖčģ WiFi ąĖ BLE čćąĖą┐ąŠą▓. ąóą░ą║ ą▒čŗą╗ąŠ ąĖ ą▓ čŹč鹊čé čĆą░ąĘ. ą» čüąĄą╣čćą░čü ąŠą┐čÅčéčī ą┐ą╗ąŠčéąĮąŠ čüąĄą╗ ąĮą░ Silabs ąĖ ąĘą░ ąóąś ąĮąĄ ą┐ąŠčüą┐ąĄą▓ą░čÄ. ąÆą┐čĆąŠč湥ą╝, čéą░ą║ąČąĄ ąĮąĄ ą┐ąŠčüą┐ąĄą▓ą░čÄ ąĖ ąĘą░ Silabs - čü ą▓ąĄčüąĮčŗ čā ąĮąĖčģ ą┐ąŠčłą╗ąĖ ą▒ąĄąĘą┐čĆąŠą▓ąŠą┤ąĮčŗąĄ ą╝ąŠą┤čāą╗ąĖ ą▓č鹊čĆąŠą│ąŠ ą┐ąŠą║ąŠą╗ąĄąĮąĖčÅ, ą░ čÅ ą▓čüčæ ąĄčēčæ ąĮą░ ą┐ąĄčĆą▓ąŠą╝ ąĘą░čüčéčĆčÅą╗. ąÜčüčéą░čéąĖ, ą┐ąŠčüąĄčéąĖą╗ čéčāčé ąĄčēčæ ą▓ąŠčĆą║čłąŠą┐ čäąĖčĆą╝čŗ Nordik - č鹥 ą╝ąĄąĮčÅ čüąĖą╗čīąĮąŠ ą┐ąŠčĆą░ąĘąĖą╗ąĖ čüą▓ąŠąĖą╝ ąĮąŠą▓čŗą╝ čüąĄą╝ąĄą╣čüčéą▓ąŠą╝ NRF91 ą┤ą╗čÅ LTE-M. ąæčāą┤ąĄčé ą▓čĆąĄą╝čÅ - ąĮą░ą┐ąĖčłčā ą┐čĆąŠ ąĮąĖčģ ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ ą▓ ąÜą×ą£ą¤ąŁąø-ąŠą▓čüą║ąŠą╣ č鹥ą╝ąĄ ą┐ąŠ ą▒ąĄąĘą┐čĆąŠą▓ąŠą┤ą║ąĄ ąĘą┤ąĄčüčī.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
uldemir
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ąŠą║čé 06, 2019 08:41:40 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214
ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
ąŁč鹊 ą▓čüčæ ą┐ąĄčćą░ą╗čīąĮąŠ čüą╗čŗčłą░čéčī. ąæčāą┤ąĄą╝ ąĮą░ą┤ąĄčÅčéčīčüčÅ, čćč鹊 ąÆą░ą╗ą▓ą░ąĮąŠ ą┐čĆąŠą┤ąŠą╗ąČąĖčé ąĮą░čćą░č鹊ąĄ. ąÉ č鹊 čÅ ąĮąĄ čāč鹥čĆą┐ąĄą╗ ąĖ čéą░ą║ąĖ ą║čāą┐ąĖą╗ ąĄą│ąŠ ą║ąĮąĖąČą║čā - ą┐ąŠčüą╝ąŠčéčĆąĖą╝, čćč鹊 čéą░ą╝ ą▒čāą┤ąĄčé ąĮą░ą┐ąĖčüą░ąĮąŠ. ąÆ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ ąĮą░ ą░ą╝ą░ąĘąŠąĮąĄ ąŠą┤ąĖąĮ ąĖąĘ ą┐ąŠą║čāą┐ą░č鹥ą╗ąĄą╣ ąĮą░ą┐ąĖčüą░ą╗, čćč鹊 čüą╗ąĖčłą║ąŠą╝ ą╝ą░ą╗ąŠ čéą░ą╝ ąĘą░ą┤ą░ąĮąĖą╣(?). ąØčā čüąĮą░čćą░ą╗ą░ ąĮčāąČąĮąŠ ą┤ąŠąČą┤ą░čéčīčüčÅ ą║ąŠą│ą┤ą░ ąŠąĮą░ ą┐čĆąĖą┤čæčé. ąÜą░ą║ ąĖ ą┐ą╗ą░čéą░. ąÜčāą┤ą░-č鹊 ąĘą░ą┐čĆąŠą┐ą░čüčéąĖą╗ą░čüčī. ą¤ąŠ čéčĆąĄą║-ą║ąŠą┤čā ą┐ąŠčüą╗ąĄą┤ąĮčÅčÅ ąĘą░ą┐ąĖčüčī ąŠčé 11 čüąĄąĮčéčÅą▒čĆčÅ, čćč鹊 ą┤ą▓ąĖąĮčāą╗ą░čüčī ąĖąĘ ąøąŠčü-ąÉąĮąČąĄą╗ąŠčüą░ ą┤ą░ą╗čīčłąĄ ą┐ąŠ čüąĄčéąĖ USPS ąĖ ą▓čüčæ. ąæčāą┤ąĄą╝ ąČą┤ą░čéčī. ą£ąŠąČąĄčé ą┐čĆąĖą┤čæčé ą║ą░ą║ ąĖ čĆąĄą╝ąĄčłą║ąĖ ą┤ą╗čÅ ą╗ą░čüčé. ąŻ čüčéą░čĆčŗčģ čüąŠą▓ąĄčéčüą║ąĖčģ ą╗ą░čüčé čĆąĄą╝ąĄčłą║ąĖ čüąŠą▓čüąĄą╝ ąŠą▒ąŠčĆą▓ą░ą╗ąĖčüčī, ąĖ ą▓ ąĖčÄą╗ąĄ ąĘą░ą║ą░ąĘą░ą╗ ąĮą░ ebay ą║ą░ą║ąĖąĄ-č鹊, ą▓čĆąŠą┤ąĄ ą┐ąŠą┤čģąŠą┤čÅčēąĖąĄ. ąøąĄč鹊 čāąČąĄ ą┐čĆąŠčłą╗ąŠ, ą▓ąŠą┤ą░ ąŠčüčéčŗą╗ą░, ą║čāą┐ą░ą╗čīąĮčŗą╣ čüąĄąĘąŠąĮ ąŠą▒čŖčÅą▓ąĖą╗ ąĘą░ą║čĆčŗčéčŗą╝. ąś čÅ čāąČąĄ ąĖčģ čüą┐ąĖčüą░ą╗, čéą░ą║ ą║ą░ą║ ą┐čĆąŠčłą╗ąŠ čāąČąĄ ą▒ąŠą╗ąĄąĄ ą┤ą▓čāčģ ą╝ąĄčüčÅčåąĄą▓, ąĖ čéčāčé ąŠąĮąĖ ą┐čĆąĖčģąŠą┤čÅčé. ąÜčüčéą░čéąĖ, ąĮąŠčĆą╝ą░ą╗čīąĮąŠ ą┐ąŠą┤ąŠčłą╗ąĖ (ą╝ąĮąĄ ą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 ąŠąĮąĖ ą▒čāą┤čāčé čüąĖą╗čīąĮąŠ čāąČąĄ, č湥ą╝ ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮčŗąĄ čĆąĄą╝ąĄčłą║ąĖ) - ą┐čĆąĖčłą╗ąŠčüčī ą╗ąĄąĘčéčī ą▓ čģąŠą╗ąŠą┤ąĮčāčÄ ą▓ąŠą┤čā, čćč鹊ą▒čŗ ąŠą▒ąĮąŠą▓ąĖčéčī ą┐ąŠą║čāą┐ą║čā. ą¤ąŠą┤čāą╝ą░ą╗, čćč鹊 ą┐ąŠčĆą░ ą┤ą╗čÅ čŹč鹊ą╣ ą┐ą╗ą░čéčŗ ą┐čĆąĖąŠą▒čĆąĄčüčéąĖ OLED ą┤ąĖčüą┐ą╗ąĄą╣, ą║ąŠą│ą┤ą░ (ąĄčüą╗ąĖ) ąŠąĮą░ ą┐čĆąĖą┤čæčé. ąØą░čćą░ą╗ ąĖąĘčāčćą░čéčī... ąöą╗čÅ ą┐ą╗ą░čéčŗ ą┐čĆąĄą┤čāčüą╝ąŠčéčĆąĄąĮ 1.3" Adafruit-ąŠą▓čüą║ąĖą╣ ą┤ąĖčüą┐ą╗ąĄą╣. ąÉą│ą░ - ąĮą░ ebay ąŠąĮ čüą░ą╝čŗą╣ ą┤ąŠčĆąŠą│ąŠą╣ ąĖ ąĄčüčéčī. ą¤ąŠčćčéąĖ ą▓ 10 čĆą░ąĘ ą┤ąŠčĆąŠąČąĄ ą┤čĆčāą│ąĖčģ ą░ąĮą░ą╗ąŠą│ąŠą▓. ą¤ąŠčüą╝ąŠčéčĆąĄą╗ čćč鹊 čŹč鹊 ąĘą░ čüč湥čé č鹊ą│ąŠ, čćč鹊 ąĮą░ čŹč鹊ą╣ ą┐ą╗ą░č鹥 ą┐ąĖčéą░ąĮąĖąĄ 5ą▓, ą┤ą░ą╗čīčłąĄ čüč鹊ąĖčé čüčéą░ą▒ąĖą╗ąĖąĘą░č鹊čĆ ąĮą░ 3.3ą▓ ąĖ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī čāčĆąŠą▓ąĮąĄą╣. ąŻ ą┤ąĄčłąĄą▓čŗčģ - ąĮąĖč湥ą│ąŠ čŹč鹊ą│ąŠ ąĮąĄčé. ąśą╝ ą┤ą░ą▓ą░ą╣ ą┐ąĖčéą░ąĮąĖąĄ 3.3ą▓ (čćč鹊 ą╝ąĄąĮčÅ ą▓ą┐ąŠą╗ąĮąĄ čāčüčéčĆą░ąĖą▓ą░ąĄčé). ą¤čĆą░ą▓ą┤ą░ čĆą░ąĘą▓ąŠą┤ą║ą░ čĆą░ąĘčŖčæą╝ą░ čüąŠą▓ąĄčĆčłąĄąĮąĮąŠ ąĖąĮą░čÅ - čéą░ą║ čćč鹊 ą▓ ą┐čĆąĄą┤čāčüą╝ąŠčéčĆąĄąĮąĮąŠąĄ ą╝ąĄčüč鹊 ąŠąĮąŠ ąĮąĄ ą┐ąŠą┤čģąŠą┤ąĖčé. ąØąŠ ą╝ąĮąĄ čŹč鹊čé ą▓ą░čĆąĖą░ąĮčé čāčüčéą░ąĮąŠą▓ą║ąĖ ą┤ąĖčüą┐ą╗ąĄčÅ č鹊ąČąĄ ąĮąĄ ąŠčüąŠą▒ąŠ ąĮčĆą░ą▓ąĖčéčüčÅ. ąóą░ą╝ ą┤ąĖčüą┐ą╗ąĄą╣ - č鹊ą╗čīą║ąŠ ą┤ąĖčüą┐ą╗ąĄą╣, ą░ čā ą╝ąĄąĮčÅ čŹč鹊 ą┤ąĖčüą┐ą╗ąĄą╣ čü ą║ąĮąŠą┐ą║ą░ą╝ąĖ - čé.ąĄ. ąĖąĮč鹥čĆą░ą║čéąĖą▓ąĮčŗą╣ čāąĘąĄą╗. ą» čü ąĮąĄą│ąŠ ą╝ąŠą│čā čĆąŠą▒ąŠčéą░ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī, ą┐čĆąŠą▓ąĄčüčéąĖ č鹥čüčéčŗ, čüą┤ąĄą╗ą░čéčī ąĘą░ą┐čāčüą║.  ąÆąŠčé ą┐ąŠą║ą░ čā ą╝ąĄąĮčÅ čéą░ą║ ąĮą░čćą░ą╗čīąĮąŠąĄ ą╝ąĄąĮčÄ ą▓čŗą│ą╗čÅą┤ąĖčé. ąÜąŠčĆąŠčć, ą║čāą┐ąĖą╗ čÅ čŹč鹊čé "ą║ąĖčéą░ą╣čüą║ąĖą╣" ą┤ąĖčüą┐ą╗ąĄą╣ ąĖ ą┐ąŠą║ą░ ąŠąĮ ąĖą┤čæčé čĆąĄčłąĖą╗ ąĮąĄą╝ąĮąŠą│ąŠ ą┐ąŠčāą┐čĆą░ąČąĮčÅčéčīčüčÅ. ąÜčüčéą░čéąĖ ą▓ąŠčé čüčüčŗą╗ą║ą░ ąĮą░ ą▒ą╗ąŠą│ ąĮą░ 菹╗ąĄą╝ąĄąĮč鹥14, ą│ą┤ąĄ č湥ą╗ąŠą▓ąĄą║ čüą┤ąĄą╗ą░ą╗ ą║čĆą░čéą║ąĖą╣ ąŠą▒ąĘąŠčĆ ą▓čüąĄčģ ą╗ą░ą▒ąŠčĆą░č鹊čĆąĮčŗčģ. ą¤čĆą░ą▓ą┤ą░, 17-čÄ ą╗ą░ą▒čā ąŠąĮ ąĮąĄ čüą┤ąĄą╗ą░ą╗. ąØčā ąĖ ą▓ ą▒ą╗ąŠą│ąĄ ąŠą┐ąĖčüą░ąĮąŠ čéą░ą║ - čÅ čüą┤ąĄą╗ą░ą╗ ąĖ ąŠčéčüčéą░ąĮčīč鹥. ąØą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ, ą▓ čŹčéąĖčģ ą╗ą░ą▒ą░čģ čüą░ą╝ąŠąĄ ąĖąĮč鹥čĆąĄčüąĮąŠąĄ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ Additional challenges. ąÆąŠčé, ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▓ ą╗ą░ą▒ąĄ ą┐čĆąŠ OLED ą┤ąĖčüą┐ą╗ąĄą╣ ą┐čĆąĄą┤ą╗ą░ą│ą░ą╗ąŠčüčī ąĮą░ą┐ąĖčüą░čéčī čäčāąĮą║čåąĖčÄ čĆąĖčüąŠą▓ą░ąĮąĖčÅ ą╗ąĖąĮąĖąĖ ąĮą░ 菹║čĆą░ąĮąĄ. ąØčā čéčāčé čÅ ą▓čüą┐ąŠą╝ąĮąĖą╗, čćč鹊 ą║ąŠą│ą┤ą░-č鹊 ąĮą░ ąĘą░čĆąĄ ąĘąĮą░ą║ąŠą╝čüčéą▓ą░ čü ą│čĆą░čäąĖč湥čüą║ąĖą╝ąĖ ą┤ąĖčüą┐ą╗ąĄčÅą╝ąĖ, ą┤ą╗čÅ čüą▓ąŠąĄą╣ "ą╝ąĄč鹥ąŠčüčéą░ąĮčåąĖąĖ" ą▒čŗą╗ ąĮą░ą┐ąĖčüą░ą▓čłąĖ ą▓čüąĄą│ąŠ ąŠą┤ąĮčā čäčāąĮą║čåąĖčÄ - čĆąĖčüąŠą▓ą░ąĮąĖąĄ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąĖą║ą░ (ąĘą░ą║čĆą░čłąĄąĮąĮąŠą│ąŠ ąĖą╗ąĖ ąĮąĄčé) ąĖ čü ąĄčæ ą┐ąŠą╝ąŠčēčīčÄ čÅ ą╝ąŠą│ ąĮą░čĆąĖčüąŠą▓ą░čéčī ąŠčé č鹊čćą║ąĖ ą┤ąŠ ą╗ąĖąĮąĖąĖ ąĖą╗ąĖ čĆą░ą╝ą║ąĖ, ą┐čĆąŠčüč鹊 ąĘą░ čüč湥čé ą║ąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄą╝čŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓. ą¤ąŠčéčĆą░čéąĖą╗ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą▓čĆąĄą╝čÅ ąĮą░ čŹč鹊 ą┤ąĄą╗ąŠ. ą¤ąŠą┐čāčéąĮąŠ ąĄčēąĄ ąĮą░ą┐ąĖčüą░ą╗ ą▓čŗą▓ąŠą┤ č鹥ą║čüčéą░, čüą┐čĆą░ą╣č鹊ą▓ 16čģ16 ąĖ ąŠą▒ą╗ą░ą│ąŠčĆąŠą┤ąĖą╗ ą▓čŗą▓ąŠą┤ ą┤ą▓čāčģ č鹥čüč鹊ą▓: ą╝ąŠč鹊čĆą░ ąĖ ą▒čāą╝ą┐ąĄčĆąŠą▓. square drawing - čŹč鹊 ą▓čĆąĄą╝ąĄąĮąĮčŗą╣ č鹥čüčé ą┐čĆąĖ ą┐ąŠą╝ąŠčēąĖ ą║ąŠč鹊čĆąŠą│ąŠ čÅ ąĖ ą┐čĆąŠą▓ąĄčĆčÅą╗ čĆą░ą▒ąŠčéčā čŹčéąĖčģ čäčāąĮą║čåąĖą╣. ąÉ ą┐ąŠč鹊ą╝, ą╝ąĮąĄ ąĮą░ ą│ą╗ą░ąĘą░ ą┐ąŠą┐ą░ą╗ą░čüčī čüčéčĆąŠčćą║ą░, čćč鹊 ą▓ ąĘą░ą║ą░ąĘą░ąĮąĮąŠą╝ ą┤ąĖčüą┐ą╗ąĄąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĮąĄ SSD1306, ą░ SH1106 - ąĖ ąŠąĮ ąĮąĄ ąĖą╝ąĄąĄčé č鹥čģ čäąĖčć, ą║ąŠč鹊čĆčŗą╝ąĖ čÅ čéčāčé ą┐ąŠą╗čīąĘčāčÄčüčī, ą┤ą╗čÅ čüą▓ąŠąĄą╣ ą║ąŠąĮčüčéčĆčāą║čåąĖąĖ. ąóą░ą║ čćč鹊, ą▓ąĖą┤ąĖą╝ąŠ, ą▒ąŠą╗čīčłąŠą╣ ą┤ąĖčüą┐ą╗ąĄą╣ ąŠčéą┐ą░ą┤ą░ąĄčé - ą▒čāą┤čā čüčéą░ą▓ąĖčéčī ą╝ą░ą╗ąĄąĮčīą║ąĖą╣ 0.96" - ą║ą░ą║ ąĖ čüąĄą╣čćą░čü. ąÉ ą┐ąŠč鹊ą╝, čÅ ąĄčēąĄ ąŠą▒ąĮą░čĆčāąČąĖą╗, čćč鹊 ą┐ąŠčĆčéčŗ, ąĮą░ ą║ąŠč鹊čĆčŗąĄ čÅ ąĮą░ą▓ąĄčüąĖą╗ čüą▓ąŠąĖ ą║ąĮąŠą┐ą║ąĖ ą▓ ąĮąŠą▓ąŠą╣ ą┐ą╗ą░č鹥 ą▒čāą┤čāčé ąĘą░ąĮčÅčéčŗ ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ čåąĄą╗ąĄą╣. ąóą░ą║ čćč鹊 ąŠą┐čÅčéčī ąĮą░ą┤ąŠ ą┤čāą╝ą░čéčī. ąĢčēąĄ ą┐ąŠ ą┐ąŠą▓ąŠą┤čā čĆą░ąĘą▓ąĖčéąĖčÅ čĆąŠą▒ąŠčéą░. ąÆ ą║ą░ą║ąŠą╝-č鹊 ą┤ąŠą║čāą╝ąĄąĮč鹥 ą┐čĆąŠą╝ąĄą╗čīą║ąĮčāą╗ą░ ąĖąĮč乊čĆą╝ą░čåąĖčÅ, čćč鹊 ą║ čŹč鹊ą╝čā čĆąŠą▒ąŠčéčā (RSLK-MAX) ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé ą┐ąŠą┤ą║ą╗čÄčćą░čéčī ą┤ą░ą╗čīąĮąŠą╝ąĄčĆąĮčŗąĄ čüąĄąĮčüąŠčĆčŗ čéąĖą┐ą░ time-to-fly vl6180. ą£ąŠąČąĄčé čŹč鹊 ą┤ą╗čÅ ąĮąĖčģ čéą░ą╝ ąĮą░ ą║ą░ąČą┤ąŠą╝ čāą│ą╗čā ą▓čŗą▓ąĄą┤ąĄąĮ i2c? ąØąŠ ą║ą░ą║ ąČąĄ čüąŠą│ą╗ą░čüąŠą▓ą░ąĮąĖąĄ čāčĆąŠą▓ąĮąĄą╣? ą╝ąĮąĄ ą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 ąĖą╝ ąĮčāąČąĮąŠ 2.8ą▓, ą░ ąĮąĄ 3.3. ąś ąĄčēąĄ ąĖą╝ ąĮčāąČąĮąŠ ą▓čŗą▓ąĄčüčéąĖ ą║ą░ąČą┤ąŠą╝čā čüąĖą│ąĮą░ą╗ čüą▒čĆąŠčüą░, ąĖąĮą░č湥, ą║ą░ą║ ąĖčģ ą╝ąŠąČąĮąŠ ą┐ąŠčüą░ą┤ąĖčéčī ąĮą░ ąŠą┤ąĮčā čłąĖąĮčā? ąŚą░ąĮąĖą╝ą░ą╗čüčÅ čéą░čģąŠą╝ąĄčéčĆąĖč湥čüą║ąĖą╝ąĖ čüąĄąĮčüąŠčĆą░ą╝ąĖ ąĖ 17-ą╣ ą╗ą░ą▒ąŠą╣ - ą▓ ą┐ąŠą╗ąĮčŗą╣ čĆąŠčüčé čüčéą░ą╗ą░ ą┐čĆąŠą▒ą╗ąĄą╝čŗ - ą║ą░ą║ ą▓čŗčéą░čēąĖčéčī ą┤ą░ąĮąĮčŗąĄ ąĖąĘ čĆąŠą▒ąŠčéą░ ąĮą░čĆčāąČčā. ąöą░, ą▓ ąŠčéą╗ą░ą┤čćąĖą║ąĄ čÅ ą▓ąĖąČčā čŹč鹊čé ą╝ą░čüčüąĖą▓ ą▓ ą┐ą░ą╝čÅčéąĖ. ąØąŠ ą┐ąŠą╝ąĄčéąĖčéčī čŹč鹊čé ą║čāčüąŠą║ ą┐ą░ą╝čÅčéąĖ ąĖ ąĘą░čüčāąĮčāčéčī ą▓ ą║ą╗ąĖą┐ą▒ąŠą░čĆą┤ ąĖą╗ąĖ ą║ą░ą║-č鹊 ąŠčé 菹║čüą┐ąŠčĆčéąĖčĆąŠą▓ą░čéčī čćč鹊-č鹊 ąĖą╗ąĖ ąĮąĄ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ, ąĖą╗ąĖ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ čüą╗ąĖčłą║ąŠą╝ ą╝čāč鹊čĆąĮąŠ - čüą╗ąĖčłą║ąŠą╝ ą╝ąĮąŠą│ąŠ ąĮą░ą┤ąŠ ą┤ąĄą╗ą░čéčī č鹥ą╗ąŠą┤ą▓ąĖąČąĄąĮąĖą╣. ą▓ CCS ąĄčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą╝ą░čüčüąĖą▓ ąŠč鹊ą▒čĆą░ąĘąĖčéčī ą│čĆą░čäąĖč湥čüą║ąĖ. ąØąŠ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé č鹊ą╗čīą║ąŠ 200 菹╗ąĄą╝ąĄąĮč鹊ą▓. ąś ąŠčéčéčāą┤ą░ čÅ ą╝ąŠą│čā čüą┤ąĄą╗ą░čéčī 菹║čüą┐ąŠčĆčé ą▓ csv. ąŁą║čüą┐ąŠčĆčéąĖčĆčāąĄčé, ą┐čĆą░ą▓ą┤ą░, č鹊ą╗čīą║ąŠ č鹥 čüą░ą╝čŗąĄ 200 ąŠčéčüč湥č鹊ą▓. ąØąŠ ą▓ąŠą╣ą┤čÅ ą▓ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ąĖ ą▓ą▓ąĄą┤čÅ čéą░ą╝ 500 - ą┐ąŠč湥ą╝čā č鹊 ą╝ą░čüčüąĖą▓ ąĖąĘ 32 bit integer ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą║ą░ą║ float. ąĢčēąĄ ąĮąĄą┤ąĄą╗čÄ ąĮą░ąĘą░ą┤ čéą░ą║ąŠą│ąŠ ąĮąĄ ą▒čŗą╗ąŠ. ąś ąĮąĄ ą╝ąŠą│čā ą┐ąŠąĮčÅčéčī, čćč鹊 čÅ ą┤ąĄą╗ą░čÄ ąĮąĄ čéą░ą║ ąĖą╗ąĖ čćč鹊 ąĖąĘą╝ąĄąĮąĖą╗ąŠčüčī.
_________________
ąÉ ą╗čÄą┤ąĖ ą┐ąŠčüą╝ąŠčéčĆčÅčé ąĖ čüą║ą░ąČčāčé: "ąĪąŠą▒ą░ą║ąĖ ą╗ąĄčéčÅčé. ąÆąŠčé ąĖ ąŠčüąĄąĮčī."
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Ser60
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ąŠą║čé 06, 2019 16:50:09 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 74
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 607
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą┤ąĄą║ 24, 2008 09:58:58
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3715
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 3
|
ąØąĄ čüąŠą╝ąĮąĄą▓ą░čÄčüčī, čćč鹊 ąÆą░ą╗čīą▓ą░ąĮąŠ ą┐čĆąŠą┤ąŠą╗ąČąĖčé. ą» čüą╗ąĄąČčā ąĘą░ ąĄą│ąŠ ą║ąĮąĖą│ą░ą╝ąĖ čāąČąĄ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą╗ąĄčé. ąÜčüčéą░čéąĖ, ąĄą│ąŠ ą║ąĮąĖą│ąĖ ą░ą┤ą░ą┐čéąĖčĆąŠą▓ą░ąĮčŗ ą▓ ą║ą░č湥čüčéą▓ąĄ čāč湥ą▒ąĮąĖą║ąŠą▓ ą▓ąŠ ą╝ąĮąŠą│ąĖčģ čāąĮąĖą▓ąĄčĆčüąĖč鹥čéą░čģ čüčéčĆą░ąĮčŗ. ąĪąĮą░čćą░ą╗ą░ ąŠąĮ ą┐ąĖčüą░ą╗ ą║ąĮąĖą│ąĖ ą┐ąŠą┤ Stellaris, ąĘą░č鹥ą╝ ą┐ąŠą┤ Tiva, č鹥ą┐ąĄčĆčī ą┐ąŠą┤ MSP432. ąÆ Electrical Engineering ą┐čĆąŠą│čĆą░ą╝ą╝ą░čģ ą┐čĆąŠčģąŠą┤čÅčé 3-čüąĄą╝ąĄčüčéčĆąŠą▓čŗą╣ ą║čāčĆčü ą┐ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÄ ą▓čüčéčĆąŠąĄąĮąĮčŗčģ čüąĖčüč鹥ą╝. ąĪąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ, čā ąĮąĄą│ąŠ ąĄčüčéčī 3-č鹊ą╝ąĮąĖą║. ą×ą┤ąĮą░ą║ąŠ, čéą░ą╝ ąĮą░ 50% ąĮą░ą┐ąĖčüą░ąĮąŠ č鹊ąČąĄ čüą░ą╝ąŠąĄ, čé.ąĄ. čüąĖą╗čīąĮąŠąĄ ą┐ąĄčĆąĄčüąĄč湥ąĮąĖąĄ ąĖ ąĖąĘą╗ąŠąČąĄąĮąĖąĄ ą▓ąĄčüčīą╝ą░ ąĮąĄą│ą╗čāą▒ąŠą║ąŠąĄ (ąĮą░ ą╝ąŠą╣ ą▓ąĘą│ą╗čÅą┤). ą¤ąŠčüą╗ąĄą┤ąĮąĄą╣ ą║ą░ą┐ą╗ąĄą╣ ą┤ą╗čÅ ą╝ąĄąĮčÅ ą▒čŗą╗ č鹊ą╝ 3 ąĄą│ąŠ ą║čāčĆčüą░, ą║ąŠą│ą┤ą░ čÅ ą┐čŗčéą░ą╗čüčÅ ąŠčüą▓ąŠąĖčéčī TI RTOS ą┐ą░čĆčā ą╗ąĄčé ąĮą░ąĘą░ą┤. ąØą░ čüą░ą╣č鹥 ąóąś ąĖą╝ąĄčÄčéčüčÅ čāčĆąŠą║ąĖ ą▓ ą▓ąĖą┤ąĄ ą║čĆą░čéą║ąŠą│ąŠ ąŠą┐ąĖčüą░ąĮąĖčÅ ąĖ ą▓čŗą╗ąŠąČąĄąĮčŗ ą▓ąĖą┤ąĄąŠ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą┤ąŠčĆąŠą│ąŠą│ąŠ čéčĆąĄą╣ąĮąĖąĮą│ą░ ą┐ąŠ RTOS ą▓ ąöą░ą╗ą╗ą░čüąĄ. ą×ą┤ąĮą░ą║ąŠ, ą║ą░ą║ ąŠą║ą░ąĘą░ą╗ąŠčüčī, čŹčéąĖ ą▓ąĖą┤ąĄąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ čāčüčéą░čĆąĄą╗ąĖ, ąĖ ąĄčüą╗ąĖ ą┤ąĄą╗ą░čéčī ą▓čüčæ ą║ą░ą║ čéą░ą╝, č鹊 ąĮą░ ą▓ąĄčĆčüąĖąĖ ą┤ą░ąČąĄ 2-ą╗ąĄčéąĮąĄą╣ ą┤ą░ą▓ąĮąŠčüčéąĖ ąŠąĮąĖ ąĮąĄ čĆą░ą▒ąŠčéą░ą╗ąĖ. ąÆą┐čĆąŠč湥ą╝, čŹč鹊 ą▒ąĄą┤ą░ ą╝ąĮąŠą│ąĖčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣, čćč鹊 ąĖčģ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ čćą░čüč鹊 ąĮąĄ ą┐ąŠčüą┐ąĄą▓ą░ąĄčé ąĘą░ ą┐čĆąŠą┤čāą║čåąĖąĄą╣. ąóąŠą│ą┤ą░ čÅ ąĖ ą║čāą┐ąĖą╗ 3-ą╣ č鹊ą╝ ą║čāčĆčüą░ ąÆą░ą╗čīą▓ą░ąĮąŠ, ą┐ąŠčüą▓čÅčēčæąĮąĮčŗą╣ RTOS, ąĮą░ą┤ąĄčÅčüčī čćč鹊 ąŠąĮ ą╝ąĮąĄ ą┐ąŠą╝ąŠąČąĄčé. ąØąŠ ąŠą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 ą▓ č鹊ą╝ ą║čāčĆčüąĄ ąŠąĮ ą▒ąŠą╗čīčłąĄ ąĘą░ąĮąĖą╝ą░ąĄčéčüčÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąŠą╣ ą╝ą░ą╗ąĄąĮčīą║ąŠą╣ čāč湥ą▒ąĮąŠą╣ RTOS čü ą▓ąĄčüčīą╝ą░ ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗą╝ čäčāąĮą║čåąĖąŠąĮą░ą╗ąŠą╝ ąĖ ą║ą░čüą░ąĄčéčüčÅ TI RTOS ą╗ąĖčłčī ą▓čüą║ąŠą╗čīąĘčī. ą» čéą░ą║ č鹊ą│ą┤ą░ čĆą░čüčüčéčĆąŠąĖą╗čüčÅ, čćč鹊 ąŠčéą┤ą░ą╗ ąĄą│ąŠ ą║ąĮąĖą│čā ą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā (ą║ą░ą║ donation) ąĖ ą┐ąŠą║ą╗čÅą╗čüčÅ ą▒ąŠą╗ąĄąĄ ąĮąĖą║ąŠą│ą┤ą░ ąĖčģ ąĮąĄ ą┐ąŠą║čāą┐ą░čéčī. ąöčāą╝ą░čÄ, čü čāčĆąŠą║ą░ą╝ąĖ ą┐čĆąŠ čĆąŠą▒ąŠčé čüąĖčéčāą░čåąĖčÅ ąĖąĮą░čÅ, čé.ą║. ą┐ąŠą║ą░ ą▓čŗčłą╗ą░ ą╗ąĖčłčī ą┐ąĄčĆą▓ą░čÅ ą▓ąĄčĆčüąĖčÅ ąĄą│ąŠ ąĖ ą▓čüčæ ą┤ąŠą╗ąČąĮąŠ ą┐ąŠą║ą░ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░čéčī. ąĪą╗ąĄą┤čāąĄčé, ą┐čĆą░ą▓ą┤ą░, ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ą╝ąĮąĄ čüą╗ąĄą┤ąŠą▓ą░ą╗ąŠ-ą▒čŗ ą▒ąŠą╗ąĄąĄ ą┐ą╗ąŠčéąĮąŠ ą┐ąŠčüąĖą┤ąĄčéčī ąĘą░ TI RTOS ąĖ čĆą░ąĘąŠą▒čĆą░čéčīčüčÅ čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠ. ąśą╗ąĖ ą┐ąŠ č乊čĆčāą╝ą░ą╝ ą┐ąŠą╗ą░ąĘąĖčéčī (č湥ą│ąŠ čÅ ąŠč湥ąĮčī ąĮąĄ ą╗čÄą▒ą╗čÄ, ą╝ąŠąČąĄčé ąĖ ąĘčĆčÅ). ąØąŠ č鹊ą│ą┤ą░ ą║ ąĮą░ą╝ ą▓ ą│ąŠčĆąŠą┤ ą┐čĆąĖąĄčģą░ą╗ąĖ ą╗čÄą┤ąĖ čü Micrium (ą║ąŠą│ą┤ą░ ąŠąĮą░ ąĄčēčæ ąĮąĄ ą▒čŗą╗ą░ ą┐ąŠą┤ Silabs) ąĖ čÅ ą┐ąŠčüąĄčéąĖą╗ ąĖčģ 3-ą┤ąĮąĄą▓ąĮčŗą╣ čéčĆąĄą╣ąĮąĖąĮą│ čü hands-on čāą┐čĆą░ąČąĮąĄąĮąĖčÅą╝ąĖ ąĮą░ ą┤ąĄą╝ąŠ-ą┐ą╗ą░č鹥 čü 9 čāčéčĆą░ ą┤ąŠ 5 ą▓ąĄč湥čĆą░ non-stop ą║ą░ąČą┤čŗą╣ ą┤ąĄąĮčī. ąŁč鹊 ą▒čŗą╗ą░ ąŠą│čĆąŠą╝ąĮą░čÅ čĆą░ąĘąĮąĖčåą░. ąøąĄą║č鹊čĆ ą▓ ą║ąŠąĮčåąĄ ą║čāčĆčüą░ ą┤ą░ąČąĄ ąĘą░ą╝ąĄčéąĮąŠ ąŠčģčĆąĖą┐. ąØą░ čüą╗ąĄą┤čāčÄčēąĖą╣ ą│ąŠą┤ ąŠąĮąĖ ą┐čĆąĖąĄčģą░ą╗ąĖ ą║ ąĮą░ą╝ ąŠą┐čÅčéčī ąĖ čÅ ą▓ąĘčÅą╗ ąĖčģ čéčĆąĄą╣ąĮąĖąĮą│ ąĄčēčæ čĆą░ąĘ ą┤ą╗čÅ ąĘą░ą║čĆąĄą┐ą╗ąĄąĮąĖčÅ. ąĪąĄą╣čćą░čü čÅ čüą╝ąŠčéčĆčÄ ąĖčģ ą▓ąĖą┤ąĄąŠ ąĮą░ čüą░ą╣č鹥 ąĪąĖą╗ą░ą▒čü, ąĖ ą┐ąŠąĮąĖą╝ą░čÄ, čćč鹊 ąĮą░čāčćąĖčéčīčüčÅ č湥ą╝čā-č鹊 čéą░ą╝ ą╗ąĖčłčī ą┐ąŠ ąĮąĖą╝ ąĮąĄą▓ąŠąĘą╝ąŠąČąĮąŠ, ąĖ čåąĄąĮąĮąŠčüčéčī ąĖčģ ą┤ą╗čÅ ą╝ąĄąĮčÅ ą╗ąĖčćąĮąŠ =0. ąĪą║ąŠčĆąĄąĄ, čŹčéąĖ ą▓ąĖą┤ąĄąŠ čüą╗ąĄą┤čāąĄčé čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čéčī ą║ą░ą║ čĆąĄč乥čĆąĄąĮčüčŗ ą┤ą╗čÅ ą╗čÄą┤ąĄą╣, ą║ąŠč鹊čĆčŗąĄ ąĘąĮą░čÄčé čćč鹊 ąŠąĮąĖ ą┤ąĄą╗ą░čÄčé ąĖ čģąŠčéčÅčé ąŠčüą▓ąĄąČąĖčéčī ą▓ ą┐ą░ą╝čÅčéąĖ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┤ąĄčéą░ą╗ąĖ. ą¤ąŠ Micrium (č鹊ą│ą┤ą░ čŹč鹊 ą▒čŗą╗ą░ uC/OS-II ąĖ uC/OS-III ą▓ąŠ ą▓č鹊čĆąŠą╣ čĆą░ąĘ) ąĄčüčéčī ą║čāčćą░ ą▒ąĄčüą┐ą╗ą░čéąĮčŗčģ 菹╗ąĄą║čéčĆąŠąĮąĮčŗčģ ą║ąĮąĖą│ ą┐ąŠą┤ ą┐čĆąĖą╝ąĄčĆąĮąŠ 50 čĆą░ąĘąĮčŗčģ ą┐ą╗ą░čéč乊čĆą╝ (ąĖ ą┐ą╗ą░čéąĮčŗčģ ąĄčüą╗ąĖ ą║č鹊 čģąŠč湥čé ą▒čāą╝ą░ąČąĮčāčÄ ą║ąŠą┐ąĖčÄ), ąĮąŠ ą┐ąŠ ąĮąĖą╝ čéą░ą║ąČąĄ ąĮą░čāčćąĖčéčīčüčÅ čü ąĮčāą╗čÅ ąĮąĄą▓ąŠąĘą╝ąŠąČąĮąŠ, ąĮą░ ą╝ąŠą╣ ą▓ąĘą│ą╗čÅą┤. ąĪąĖą╗ą╗ą░ą▒čŗ, ą▓ą┐čĆąŠč湥ą╝, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĖ Free RTOS, ąĮąŠ Micrium čüąĄą╣čćą░čü čā ąĮąĖčģ ą┤ąĄč乊ą╗čéąĮą░čÅ. ąØąŠ čü TI RTOS čÅ ąĮąĄ čüą┤ą░ą╗čüčÅ ąĖ ą▓ąĄčĆąĮčāčüčī ą┐ąŠ ą╝ąĄčĆąĄ ą▓čĆąĄą╝ąĄąĮąĖ. ąĀą░ąĘčĆą░ą▒ąŠčéą║ą░ čüąŠą▓čĆąĄą╝ąĄąĮąĮčŗčģ ą▒čüąĖčüč鹥ą╝ čü ą▒ąŠą╗čīčłąĖą╝ąĖ čüč鹥ą║ą░ą╝ąĖ čéąĖą┐ą░ WiFi ąĖą╗ąĖ BLE ą▓čüčæ ą▒ąŠą╗ąĄąĄ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą┐ąŠą┤ RTOS, a ą▒ąĄąĘą┐čĆąŠą▓ąŠą┤ą║ą░ čā TI ąŠčéą╗ąĖčćąĮą░čÅ, ą║ą░ą║, ą▓ą┐čĆąŠč湥ą╝, ąĖ čā ąĪąĖą╗ą╗ą░ą▒ąŠą▓. ąØą░čüčćčæčé čéčĆąĄą║ ą║ąŠą┤ą░, ąĄčüą╗ąĖ ą╝ąĄąĮčÅąĄčéčüčÅ carrier, č鹊 čéčĆąĄą║ ą║ąŠą┤ čéą░ą╝ ą┤čĆčāą│ąŠą╣ ąĖ ąĄą│ąŠ ąŠą▒čŗčćąĮąŠ ąĮąĄ ą┤ą░čÄčé. ąŻ ą╝ąĄąĮčÅ č鹊ąČąĄ čüą░ą╝ąŠąĄ čü USPS. ąĪą╗ąĄą┤čāąĄčé ąĮą░ą▒čĆą░čéčīčüčÅ č鹥čĆą┐ąĄąĮąĖčÅ. ąĪ VL ToF čćąĖą┐ą░ą╝ąĖ čĆą░ą▒ąŠčéą░ą╗ ą┐ą░čĆčā ą╗ąĄčé ąĮą░ąĘą░ą┤ čüąŠ čüčéčāą┤ąĄąĮč鹊ą╝. ąÆąŠą┤ ąĮą░čłą░ ą╝ą░ą║ąĄčéą║ą░ čü PSoC-4. ą¤ąĖčéą░ą╗ ą▓čüčæ ąŠčé 2.8V (čüčéą░ą▒ ąĮą░ ąĘąĄą╗čæąĮąŠą╣ ą┐ą╗ą░čéą║ąĄ), čćč鹊ą▒čŗ ąĮąĄ ą▒čŗą╗ąŠ ą┐čĆąŠą▒ą╗ąĄą╝ čü čāčĆąŠą▓ąĮčÅą╝ąĖ. ąĪąĄą╣čćą░čü čāąČąĄ ą╝ą░ą╗ąŠ čćč鹊 ą┐ąŠą╝ąĮčÄ ą║čĆąŠą╝ąĄ č鹊ą│ąŠ, čćč鹊 čĆą░ą▒ąŠčéą░ą╗ąŠ ą║ą░ą║ ąĘą░čÅą▓ą╗ąĄąĮąŠ, čé.ą║. ąŠčüąĮąŠą▓ąĮčāčÄ čćą░čüčéčī čĆą░ą▒ąŠčéčŗ čüčéčāą┤ąĄąĮčé ą▓čŗą┐ąŠą╗ąĮąĖą╗, č鹊čćąĮąĄąĄ čüčéčāą┤ąĄąĮčéą║ą░. ą¤ąŠą╝ąĮčÄ ą╗ąĖčłčī čćč鹊 ą▓ ą░ą┐ąĮąŠčāčéą░čģ ąĮą░ čüą░ą╣č鹥 ST ą▓čüčæ čĆą░čüą┐ąĖčüą░ąĮąŠ, ą┤ą░ąČąĄ ą┐čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ą┐čĆąĖą▓ąĄą┤čæąĮ. ąĢą╣ č鹊ą│ą┤ą░ ąŠčüčéą░ą▓ą░ą╗ąŠčüčī ą╗ąĖčłčī ą░ą┤ą░ą┐čéąĖčĆąŠą▓ą░čéčī ąĄą│ąŠ ą┐ąŠą┤ PSoC. 
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ą×čĆą│ą░ąĮąĖąĘą░čåąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąĮą░ą┤ąĄąČąĮčŗčģ ą╗ąĖčéąĖąĄą▓čŗčģ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓ EVE ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ ą░ąĘąĖą░čéčüą║ąŠą│ąŠ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░
ąÜą░č湥čüčéą▓ąĄąĮąĮąŠąĄ ąĖ ą▒ąĄąĘąŠą┐ą░čüąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, čĆą░ą▒ąŠčéą░čÄčēąĄąĄ ąŠčé ą░ą║ą║čāą╝čāą╗čÅč鹊čĆą░, ą┤ąŠą╗ąČąĮąŠ čāčćąĖčéčŗą▓ą░čéčī ąĄą│ąŠ čäąĖąĘąĖč湥čüą║ąĖąĄ ąĖ čģąĖą╝ąĖč湥čüą║ąĖąĄ čüą▓ąŠą╣čüčéą▓ą░, ą┐čĆąŠčäąĖą╗ąĖ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░, ąĖčģ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ą┐ąŠą┤ ą▓ą╗ąĖčÅąĮąĖąĄą╝ čĆą░ąĘą╗ąĖčćąĮčŗčģ čāčüą╗ąŠą▓ąĖą╣, čéą░ą║ąĖčģ ą║ą░ą║ č鹥ą╝ą┐ąĄčĆą░čéčāčĆą░ ąĖ č鹊ą║ ąĮą░ą│čĆčāąĘą║ąĖ. ą£čŗ čĆą░čüčüą║ą░ąČąĄą╝ ąŠ ą╗ąĖčéąĖą╣-ąĖąŠąĮąĮčŗčģ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąĮčŗčģ ą▒ą░čéą░čĆąĄčÅčģ EVE ąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čĆąĄčłąĄąĮąĖčÅčģ ąŠčé čĆą░ąĘą╗ąĖčćąĮčŗčģ ą║ąĖčéą░ą╣čüą║ąĖčģ ą║ąŠą╝ą┐ą░ąĮąĖą╣, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗčģ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠč鹊ą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čŹčéąĖčģ ąÉąÜąæ. ą¤čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ą▓ čüčéą░čéčīąĄ ą║ąĖčéą░ą╣čüą║ąĖąĄ ą░ąĮą░ą╗ąŠą│ąĖ ą┐ąŠą╝ąŠą│čāčé ąĘą░ą╝ąĄąĮąĖčéčī ą┐čĆąŠą┤čāą║čåąĖčÄ ąĘą░ą┐ą░ą┤ąĮčŗčģ ą▒čĆąĄąĮą┤ąŠą▓ čü ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĄą╣ čåąĄąĮčŗ ą▒ąĄąĘ ą┐ąŠč鹥čĆąĖ ą║ą░č湥čüčéą▓ą░.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
uldemir
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ąŠą║čé 08, 2019 16:06:08 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214
ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
|
ą» ąĄčæ č鹊ąČąĄ ąČą┤čā čü ąĮąĄč鹥čĆą┐ąĄąĮąĖąĄą╝. ąÉą╝ą░ąĘąŠąĮ ąŠą▒ąĄčēą░ąĄčé, čćč鹊 ą┐ąŠą╗čāčćčā ą▓ č鹥č湥ąĮąĖąĖ ą▒ą╗ąĖąČą░ą╣čłąĄą╣ ąĮąĄą┤ąĄą╗ąĖ (11ąŠą║čé-15ąŠą║čé).
ąÉ čÅ čéčāčé ą║ą░ą║-č鹊 čĆą░ąĘą╝čŗčłą╗čÅą╗ ąĮą░ č鹥ą╝čā "ąÉ čćč鹊 ą┤ą░ą╗čīčłąĄ?" ąØčā ą┐čĆąŠčģąŠą┤ąĖčé čĆąŠą▒ąŠčé čŹč鹊čé ą┐čĆąŠčüč鹊ą╣ ą╗ą░ą▒ąĖčĆąĖąĮčé. ąś čéčāčé čÅ ą▓čüą┐ąŠą╝ąĮąĖą╗, čćč鹊 ą║ąŠą│ą┤ą░ čÅ ą▓ą┐ąĄčĆą▓čŗąĄ ą┐čĆąĖąĄčģą░ą╗ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ą║ą░ą║ ą┐čĆąŠčģąŠą┤čÅčé čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅ, ą╗ą░ą▒ąĖčĆąĖąĮčé ąĮąĄ ą▒čŗą╗ ąŠą┤ąĮąŠčüą▓čÅąĘąĮčŗą╝. ąóąŠą│ą┤ą░ čÅ ą║ą░ą║ čĆą░ąĘ ą┐ąŠą┤čāą╝ą░ą╗, čćč鹊 čŹč鹊 ą▒čŗą╗ą░ ą▒čŗ ąĖąĮč鹥čĆąĄčüąĮą░čÅ ąĘą░ą┤ą░čćą║ą░. ąØąŠ ą▓ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ čāą▓ąĖą┤ąĄą╗, čćč鹊 ą╗ą░ą▒ąĖčĆąĖąĮčé ąĮą░čćą░ą╗ąĖ čāą┐čĆąŠčēą░čéčī, čéą░ą║ ą║ą░ą║ čüąŠą▓ąĄčĆčłąĄąĮąĮąŠ ąĮąĄ ą▒čŗą╗ąŠ čāčćą░čüčéąĮąĖą║ąŠą▓. ą¤ąŠčŹč鹊ą╝čā ą┐ąŠą┤čāą╝ą░ą╗ąŠčüčī, čćč鹊 ą┤ą╗čÅ čüą▓ąŠą▒ąŠą┤ąĮčŗčģ ą║ąŠąĮčüčéčĆčāą║čåąĖą╣ ą╝ąŠą│ą╗ąĖ ą▒čŗ ąĮąĄą╝ąĮąŠą│ąŠ ąĮą░čćą░čéčī čāčüą╗ąŠąČąĮčÅčéčī ą╗ą░ą▒ąĖčĆąĖąĮčé. ąØą░ą┤ąŠ ą▒čāą┤ąĄčé ąŠčĆą│ą░ąĮąĖąĘą░č鹊čĆą░ą╝ ąĮą░ą╝ąĄą║ąĮčāčéčī.
ąóą░ą║ ą▓ąŠčé, ą║ą░ą║ čüą┤ąĄą╗ą░čéčī čĆąŠą▒ąŠčéą░, čüą┐ąŠčüąŠą▒ąĮąŠą│ąŠ ą┐ąĄčĆąĄą┤ą▓ąĖą│ą░čéčīčüčÅ ą┐ąŠ ą╝ąĮąŠą│ąŠčüą▓čÅąĘąĮąŠą╝čā ą╗ą░ą▒ąĖčĆąĖąĮčéčā. ąóčāčé čüąĮąŠą▓ą░ ą▓čüčéą░čæčé ąĘą░ą┤ą░čćą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąĄčüč鹊ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ čĆąŠą▒ąŠčéą░. ąóčāčé čā ąĮą░čü ąĄčüčéčī ą┤ą▓ą░ ą┐ąŠą╗čÅ: ą║čĆą░čüąĮąŠąĄ - ą▓čŗčģąŠą┤ ąĖ ąĘąĄą╗ąĄąĮąŠąĄ - ą▓čģąŠą┤. ąó.ąĄ. ą┤ą▓ąĄ ą┐ąŠąĘąĖčåąĖąĖ ą▓ ą╗ą░ą▒ąĖčĆąĖąĮč鹥 ą╝čŗ ą╝ąŠąČąĄą╝ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąŠą┤ąĮąŠąĘąĮą░čćąĮąŠ. ąóą░ą║ ą▓ąŠčé ąĄčüą╗ąĖ ą╝čŗ ąĮą░čłą╗ąĖ ąĘąĄą╗ąĄąĮąŠąĄ ą┐ąŠą╗ąĄ ąĮąĄąĮą░ą╣ą┤čÅ ą║čĆą░čüąĮąŠąĄ, ąĘąĮą░čćąĖčé ą╝čŗ čüą┤ąĄą╗ą░ą╗ąĖ ą┐ąĄčéą╗čÄ ąĖ ą╗ą░ą▒ąĖčĆąĖąĮčé ąĘąĮą░čćąĖčé ą╝ąĮąŠą│ąŠčüą▓čÅąĘąĮčŗą╣.
ąöą░ą╗ąĄąĄ ąĖąĘ ą┐čĆąŠčüčéčŗčģ ąĖą┤ąĄą╣ - ą▒ąĖąĮą░čĆąĮčŗą╣ ą┐ąŠąĖčüą║. ą» ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗ ą┤ą▓ąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ loop ąĖ fork. ą¤ąĄčĆą▓ą░čÅ čüčćąĖčéą░ąĄčé čüą║ąŠą╗čīą║ąŠ čĆą░ąĘ ą╝čŗ ą▓ąĄčĆąĮčāą╗ąĖčüčī ą║ ąĮą░čćą░ą╗čā, ą░ ą▓č鹊čĆą░čÅ čüčćąĖčéą░ąĄčé ąĮąŠą╝ąĄčĆ čĆą░ąĘą▓ąĖą╗ą║ąĖ ąŠčé ąĮą░čćą░ą╗ą░ ą╗ą░ą▒ąĖčĆąĖąĮčéą░. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čÅ ą╝ąŠą│čā ą▓ ą▒ąĖąĮą░čĆąĮąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī "ąĘą░ą║čĆčŗčéčī" ą┐čĆąŠčģąŠą┤čŗ ą▓ čĆą░ąĘą▓ąĖą╗ą║ą░čģ. ąØą░ą┐čĆąĖą╝ąĄčĆ ą▓ ą┐ąĄčĆą▓ąŠą╣ ą┐ąĄčéą╗ąĄ (ą▓ ąŠčéą╗ąĖčćąĖąĖ ąŠčé ąĮčāą╗ąĄą▓ąŠą╣) čÅ ąĮą░ ą┐ąĄčĆą▓ąŠą╣ čĆą░ąĘą▓ąĖą╗ą║ąĄ ą┐čĆąŠą┐čāčüą║ą░čÄ ą┐ąŠą▓ąŠčĆąŠčé, ąĮą░ ą▓č鹊čĆąŠą╣ ą┐ąĄčéą╗ąĄ - čā ą▓č鹊čĆąŠą╣ čĆą░ąĘą▓ąĖą╗ą║ąĖ, ąĮą░ čéčĆąĄčéčīąĄą╣ ą┐ąĄčéą╗ąĄ čā ą┐ąĄčĆą▓ąŠą╣ ąĖ ą▓č鹊čĆąŠą╣ čĆą░ąĘą▓ąĖą╗ą║ąĖ. ąśčéą┤, ą┐ąŠą║ą░ čŹč鹊 ą╝ąĄąĮčÅ ąĮąĄ ą┐čĆąĖą▓ąĄą┤čæčé ą║ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠą╣ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čüč鹥ąĮąĄ, ą║ąŠč鹊čĆą░čÅ ą╝ąĄąĮčÅ ą┐čĆąĖą▓ąĄą┤čæčé ą║ ą▓čŗčģąŠą┤čā. ąĀą░ąĘčāą╝ąĄąĄčéčüčÅ ąĮą░ ąĮą░čćą░ą╗ąĄ ą║ą░ąČą┤ąŠą╣ ą┐ąĄčéą╗ąĖ čÅ čüą▒čĆą░čüčŗą▓ą░čÄ ą▓čŗčāč湥ąĮąĮčŗą╣ ą┐čāčéčī ąĖ čüąŠčģčĆą░ąĮčÅčÄ ąĄą│ąŠ ą┐ąŠ-ąĮąŠą▓ąŠą╣, ą┐ąŠą║ą░ ąĮąĄ ą┐ąŠą╗čāčćčā ą╝ą░čĆčłčĆčāčé ą║ ą▓čŗčģąŠą┤čā. ąŁč鹊, ą║ąŠąĮąĄčćąĮąŠ, ą┤ąŠą╗ą│ąŠ, ąĮąŠ čĆą░ąĮąŠ ąĖą╗ąĖ ą┐ąŠąĘą┤ąĮąŠ ą╝ąĄąĮčÅ ą┐čĆąĖą▓ąĄą┤čæčé ą║ ą▓čŗčģąŠą┤čā. ą¤čĆąĖč湥ą╝, čÅ ą╝ąŠą│čā čŹč鹊čé ą┐čĆąŠčåąĄčüčü čāčüą║ąŠčĆąĖčéčī, ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čĆąŠą▒ąŠčéą░ čāą║ą░ąĘą░ą▓ ąĮą░čćąĖąĮą░čéčī čüčĆą░ąĘčā čü 4 ą┐ąĄčéą╗ąĖ, č鹊ą│ą┤ą░ čĆąŠą▒ąŠčé ąĮą░ čéčĆąĄčéčīąĄą╣ čĆą░ąĘą▓ąĖą╗ą║ąĄ ą┐ąŠą╣ą┤čæčé čéčāą┤ą░ ą║čāą┤ą░ ą╝ąĮąĄ ąĮčāąČąĮąŠ čüčĆą░ąĘčā, ą┐čĆąŠą┐čāčüčéąĖą▓ ą┐čĆąĄą┤čŗą┤čāčēąĖąĄ ąĖč鹥čĆą░čåąĖąĖ.
ąØąĄ čüą┐ąŠčĆčéąĖą▓ąĮąŠąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ? ąźą╝, čéčĆčāą┤ąĮąŠ čüą║ą░ąĘą░čéčī, čćč鹊 ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░čéčī ą┐ąŠą┤ ą┐ąŠą╗ąĮąŠą╣ ą░ą▓č鹊ąĮąŠą╝ąĮąŠčüčéčīčÄ čĆąŠą▒ąŠčéą░. ąÆąĄą┤čī čüčéčĆą░č鹥ą│ąĖčÄ čÅ ąĖą╝ąĄčÄ ą┐čĆą░ą▓ąŠ ąĘą░ą┤ą░čéčī čĆąŠą▒ąŠčéčā? ąÆ čüą░ą╝ąŠą╝ ąĮą░čćą░ą╗ąĄ (ą┤ą╗čÅ ą╝ąĄąĮčÅ, ą║ąŠą│ą┤ą░ čÅ ą▓ą┐ąĄčĆą▓čŗąĄ ą┐ąŠčüąĄčéąĖą╗ čŹč鹊 ą╝ąĄčĆąŠą┐čĆąĖčÅčéąĖąĄ) ą▒čŗą╗ čéą░ą║ąŠą╣ ą┐ąŠčĆčÅą┤ąŠą║ ą▓ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅčģ, čćč鹊 ą┐ąŠčüą╗ąĄ č鹥čģąĮąĖč湥čüą║ąŠą╣ ąĖąĮčüą┐ąĄą║čåąĖąĖ čĆąŠą▒ąŠčé ą┐ąŠą╝ąĄčēą░ą╗čüčÅ ą▓ "ą║ą░čĆą░ąĮčéąĖąĮ" ąĖ ą▒čĆą░ą╗čüčÅ ąŠčéčéčāą┤ą░ č鹊ą╗čīą║ąŠ ąĮą░ ą▓čĆąĄą╝čÅ ąĘą░ąĄąĘą┤ą░. ą¤ąŠčüą╗ąĄ ąĘą░ąĄąĘą┤ą░ ąĮą░ą┤ąŠ ą▒čŗą╗ąŠ ąĄą│ąŠ ą▓ąŠąĘą▓čĆą░čēą░čéčī ą▓ ą║ą░čĆą░ąĮčéąĖąĮ ąŠą▒čĆą░čéąĮąŠ. ąŁč鹊 ą▒čŗą╗ąŠ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ą┐ąŠčüą╗ąĄ ą┐čĆąŠčģąŠąČą┤ąĄąĮąĖčÅ ąĖąĮčüą┐ąĄą║čåąĖąĖ ąĮąĄą╗čīąĘčÅ ą▒čŗą╗ąŠ ą▓ąĮąĄčüčéąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą▓ čĆąŠą▒ąŠčé, ą║ąŠč鹊čĆčŗąĄ ą┤ą░ą┤čāčé ąĮąĄąŠą┐čĆą░ą▓ą┤ą░ąĮąĮąŠąĄ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą▓ąĘčÅčéčī ąĖ čāčéčÅąČąĄą╗ąĖčéčī čüčāą╝ąŠ-čĆąŠą▒ąŠčéą░ čüą▓ąĄčĆčģ ą┤ąŠą┐čāčüčéąĖą╝ąŠą│ąŠ. ąØąŠ ą▓ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ ąŠčé čŹč鹊ą╣ ą┐čĆą░ą║čéąĖą║ąĖ ąŠčéą║ą░ąĘą░ą╗ąĖčüčī. ąÆąŠąĘą╝ąŠąČąĮąŠ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ čüą╗čāčćą░čÅ, ą║ąŠą│ą┤ą░ ą┐čŗčéą░čÅčüčī ą┐ąĄčĆąĄą┤ą▓ąĖąĮčāčéčī čüč鹊ą╗ čü "ąŠą║ą░čĆą░ąĮčéąĖąĮąĄąĮąĮčŗą╝ąĖ" čĆąŠą▒ąŠčéą░ą╝ąĖ, čćč鹊ą▒čŗ ą▓čŗčüą▓ąŠą▒ąŠą┤ąĖčéčī ą▓ ąĘą░ą╗ąĄ ą╝ąĄčüč鹊, ąŠąĮąĖ ą▓čüąĄ ą┐ąŠčüčŗą┐ą░ą╗ąĖčüčī ąĮą░ ą┐ąŠą╗. ąÉ ą▓čüąĄ čŹčéąĖ čĆąŠą▒ąŠčéčŗ ą▒čŗą╗ąĖ ąøąĄą│ąŠ...
ąŁč鹊čé čüą┐ąŠčüąŠą▒ čģą░čĆą░ą║č鹥čĆąĄąĮ č鹥ą╝, čćč鹊 ąĮąĄ čéčĆąĄą▒čāąĄčé čüąŠąĘą┤ą░ąĮąĖčÅ ąĖ čģčĆą░ąĮąĄąĮąĖčÅ ą▓ ą┐ą░ą╝čÅčéąĖ ą╗ą░ą▒ąĖčĆąĖąĮčéą░ ąĖą╗ąĖ ąĄą│ąŠ ąĖčüčüą╗ąĄą┤ąŠą▓ą░ąĮąĮąŠą╣ čćą░čüčéąĖ. ąĢčüą╗ąĖ ąČąĄ ąĘą░ą┐ąŠą╝ąĖąĮą░čéčī ą▓ ą║ą░ą║ąŠą╝ čāąĘą╗ąĄ ą║čāą┤ą░ čüą▓ąŠčĆą░čćąĖą▓ą░ą╗ąĖ, č鹊ą│ą┤ą░ ą╝ąŠąČąĮąŠ ą┐čĆąŠčüč鹊 ąĖąĘą╝ąĄąĮąĖčéčī "čüčéčĆą░č鹥ą│ąĖčÄ ą┐ąŠą▓ąŠčĆąŠč鹊ą▓". ąó.ąĄ. ąĮąĄ ą┤ąĄčƹȹ░čéčīčüčÅ ąĘą░ čüč鹥ąĮą║čā ąĖ ą┤ąĄą╗ą░čéčī č鹊ą╗čīą║ąŠ ą╗ąĄą▓čŗąĄ ąĖą╗ąĖ č鹊ą╗čīą║ąŠ ą┐čĆą░ą▓čŗąĄ ą┐ąŠą▓ąŠčĆąŠčéčŗ, ą░ čüą║ą░ąČąĄą╝, čüąĮą░čćą░ą╗ą░ ą┐čĆąŠą▒ąŠą▓ą░čéčī ąĖą┤čéąĖ ą┐čĆčÅą╝ąŠ ąĖ č鹊ą╗čīą║ąŠ ą┐ąŠč鹊ą╝ ą┐čĆąŠą▒ąŠą▓ą░čéčī ą┤čĆčāą│ąĖąĄ ą▓ą░čĆąĖą░ąĮčéčŗ. ąØą░ą┐čĆąĖą╝ąĄčĆ ą▓ ą╗ą░ą▒ąĖčĆąĖąĮč鹥 čü ą┐ąŠčüą╗ąĄą┤ąĮąĖčģ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖą╣ ąŠč湥ąĮčī ą┐ąŠą┤ąŠčłąĄą╗ ą▒čŗ ą▓ą░čĆąĖą░ąĮčé ą┐čĆčÅą╝ąŠ, ą▓ą╗ąĄą▓ąŠ, ąĮą░ą┐čĆą░ą▓ąŠ. ąŁč鹊 ą┤ą░ąČąĄ ą┐čĆąĖ ą┐čĆąŠą▒ąĮąŠą╝ ą┐čĆąŠčģąŠą┤ąĄ ą┐čĆąĖą▓ąĄą╗ąŠ ą▒čŗ ą║ ą▓čŗčģąŠą┤čā ą▓čüąĄą│ąŠ ąĮą░ 4 ą║ą╗ąĄč鹊čćą║ąĖ ą┤ąŠą╗čīčłąĄ, č湥ą╝ čüą░ą╝čŗą╣ ą║ąŠčĆąŠčéą║ąĖą╣ ą╝ą░čĆčłčĆčāčé. ąØąŠ čŹč鹊čé ą╝ąĄč鹊ą┤ čāąČąĄ ąĮąĄ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé č鹊, čćč鹊 ą▓čŗčģąŠą┤ ą▓čüąĄą│ą┤ą░ ą▒čāą┤ąĄčé ąĮą░ą╣ą┤ąĄąĮ.
ąśąĘ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą╝ąĄč鹊ą┤ąŠą▓ - ą░ą╗ą│ąŠčĆąĖčéą╝ ąøčÄą║ą░-ąóčĆąĄą╝ąŠ. ąØąŠ ąŠąĮ čéčĆąĄą▒čāąĄčé "ąŠčüčéą░ą▓ą╗čÅčéčī ą┐ąŠą╝ąĄčéą║ąĖ" ą▓ ą╗ą░ą▒ąĖčĆąĖąĮč鹥. ąÜąŠąĮąĄčćąĮąŠ, ąĮąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ čĆąĖčüąŠą▓ą░čéčī ą║čĆąĄčüčéąĖą║ąĖ ąĮą░ čüč鹥ąĮą░čģ - ą╝ąŠąČąĮąŠ čŹč鹊 ą┤ąĄą╗ą░čéčī ą▓ ą┐ą░ą╝čÅčéąĖ. ąōą╗ą░ą▓ąĮąŠąĄ, ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, čćč鹊 ąĮą░ą╣ą┤ąĄąĮąĮčŗą╣ ą┐ąĄčĆąĄą║čĆčæčüč鹊ą║, č鹊čé, ą│ą┤ąĄ ą╝čŗ čāąČąĄ ą▒čŗą╗ąĖ. ą¦č鹊 ą┐čĆąĖ ąŠčĆč鹊ą│ąŠąĮą░ą╗čīąĮąŠą╝ ą╗ą░ą▒ąĖčĆąĖąĮč鹥 ąĖ ąĮą░ą╗ąĖčćąĖąĖ čéą░čģąŠą┤ą░čéčćąĖą║ą░ ąĮą░ čĆąŠą▒ąŠč鹥 čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą┐čĆąŠčüč鹊ą╣ ąĘą░ą┤ą░č湥ą╣. ąØąŠ ą░ą╗ą│ąŠčĆąĖčéą╝ ąøčÄą║ą░-ąóčĆąĄą╝ąŠ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé ąĮą░čģąŠąČą┤ąĄąĮąĖąĄ ą▓čŗčģąŠą┤ą░, ąĮąŠ ąĮąĄ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé ą┐ąŠąĖčüą║ ąĮą░ąĖą║čĆą░čéčćą░ą╣čłąĄą│ąŠ ą┐čāčéąĖ. ą¤ąŠčŹč鹊ą╝čā, ą┐ąŠą║ą░ čĆą░ąĘą╝čŗčłą╗čÅčÄ, čćč鹊 ąĮčāąČąĮąŠ čĆąŠą▒ąŠčéčā ą║ ą║ąŠą╝ą░ąĮą┤ąĄ Solve Maze ą┤ąŠą▒ą░ą▓ąĖčéčī ą║ąŠą╝ą░ąĮą┤čā Explore Maze. ąó.ąĄ. ą┐čāčüčéčī čĆąŠą▒ąŠčé ąĖčüčüą╗ąĄą┤čāąĄčé ą╗ą░ą▒ąĖčĆąĖąĮčé - čüąŠąĘą┤ą░čüčé ą▓ ą┐ą░ą╝čÅčéąĖ ąĄą│ąŠ ą║ą░čĆčéčā, ą░ ąĘą░č鹥ą╝ ą▓ ą┐ą░ą╝čÅčéąĖ ąĮą░ą╣ą┤čæčé ą║čĆą░čéčćą░ą╣čłąĖą╣ ą┐čāčéčī ąĖ ą┐čāčüčéčī ą┐ąŠ ąĮąĄą╝čā ą▒ąĄąČąĖčé.
ąóą░ą║ čćč鹊 čÅ ą┐ąŠčéąĖčģąŠąĮčīą║čā ąĮą░čćą░ą╗ čĆąĄą░ą╗ąĖąĘąŠą▓čŗą▓ą░čéčī ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ čäčāąĮą║čåąĖąĖ. ą¤čĆą░ą▓ą┤ą░, ą▓č湥čĆą░ ąĘą░ą╝ąĄčéąĖą╗, čćč鹊 čÅ čćč鹊-č鹊 ą┐ąŠą╗ąŠą╝ą░ą╗. ąØčā ą▒čāą┤čā čĆą░ąĘą▒ąĖčĆą░čéčīčüčÅ. ą¤ąŠč鹊ą╝čā ą║ą░ą║ ąĮą░ čāčćą░čüčéą║ąĄ ą│ą┤ąĄ ą┐čĆąŠčüč鹊 ą┐čĆą░ą▓čŗą╣ ą┐ąŠą▓ąŠčĆąŠčé - ą┐ąŠą▓ąŠčĆą░čćąĖą▓ą░ąĄčé ąĮą░ą╗ąĄą▓ąŠ, čé.ąĄ. čĆąĄą░ą╗čīąĮąŠ čĆą░ąĘą▓ąŠčĆą░čćąĖą▓ą░ąĄčéčüčÅ ąĖ ąĖą┤čæčé ąĮą░ąĘą░ą┤. ąĪą░ą╝ąŠąĄ ąŠą▒ąĖą┤ąĮąŠąĄ čćč鹊 čÅ ą┐ąŠą║ąŠą┐ą░ą╗čüčÅ ą│čĆčÅąĘąĮčŗą╝ąĖ čĆčāčćą║ą░ą╝ąĖ ąĖ ą▓ čäčāąĮą║čåąĖąĖ ą▓čŗą┐ąŠą╗ąĮčÅčÄčēąĄą╣ ą┐ąŠą▓ąŠčĆąŠčéčŗ, ąĖ ą▓ čäčāąĮą║čåąĖąĖ ą▓čŗą▒ąĖčĆą░čÄčēąĄą╣ ą║ą░ą║ąŠą╣ ą┐ąŠą▓ąŠčĆąŠčé ą▓čŗą┐ąŠą╗ąĮąĖčéčī. ą×čłąĖą▒ą║ą░ ą│ą┤ąĄ-č鹊 čéą░ą╝.
_________________
ąÉ ą╗čÄą┤ąĖ ą┐ąŠčüą╝ąŠčéčĆčÅčé ąĖ čüą║ą░ąČčāčé: "ąĪąŠą▒ą░ą║ąĖ ą╗ąĄčéčÅčé. ąÆąŠčé ąĖ ąŠčüąĄąĮčī."
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
uldemir
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąŠą║čé 09, 2019 18:57:46 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214
ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
ąÜąĮąĖąČą║ą░ ą┐čĆąĖčłą╗ą░. ąŻąČąĄ ą▓č湥čĆą░, ąĮąŠ ą▓ ą┐ąŠčćč鹊ą▓čŗą╣ čÅčēąĖą║ ąĮąĄ ą▓ą╗ąĄąĘą░ą╗ą░, ą┐ąŠčŹč鹊ą╝čā ą┐ąŠčćčéą░ą╗čīąŠąĮ ąŠčüčéą░ą▓ąĖą╗ą░ ąĖąĘą▓ąĄčēąĄąĮąĖąĄ ąĖ čÅ čüąĄą│ąŠą┤ąĮčÅ čüą╗ąŠą╝čÅ ą│ąŠą╗ąŠą▓čā čü 菹╗ąĄą║čéčĆąĖčćą║ąĖ čüą║ą░ą║ą░ą╗ ąĮą░ ą┐ąŠčćčéčā, čćč鹊ą▒čŗ čāčüą┐ąĄčéčī ą┤ąŠ ąĘą░ą║čĆčŗčéąĖčÅ. ąÜąĮąĖąČą║ą░ čüą▓ąĄąČą░č湊ą║ - ąĖčÄą╗čī 2019ą│. ą┐ąĄčĆą▓ąŠąĄ ąĖąĘą┤ą░ąĮąĖąĄ. ą¤ąŠą╗ąĖčüčéą░ą╗... ąÜąŠą╣ čćč鹊 č湥čĆąĄąĘ čćčāčĆ ą┐ąŠ ąŠčüąĮąŠą▓ą░ą╝. ąōą╗čÅąĮčāą╗ ą│ą╗ą░ą▓čā ą┐ąŠ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖčÅą╝. ąØčā ą┤ą░, čĆą░čüą┐ąĖčüą░ąĮčŗ ą┐čĆąĖąĮčåąĖą┐čŗ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ, čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ, i2c ąĖ čćčāčéčī-čćčāčéčī čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ. ąÆąĮąĖą╝ą░č鹥ą╗čīąĮąŠ ą┐ąŠčüą╝ąŠčéčĆąĄą╗ i2c - ą┤ą▓ą░ ą┐čĆąĖą╝ąĄčĆą░ ą▒ąĄąĘ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąś ą┤ą╗čÅ ąŠą▒ą╗ąĄą│č湥ąĮąĖčÅ ąČąĖąĘąĮąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ "ą░ą▓č鹊čüč鹊ą┐" (čüč湥čéčćąĖą║ ą▒ą░ą╣č鹊ą▓). ąØą░ą┤ąŠ ą▒čāą┤ąĄčé čüčĆą░ą▓ąĮąĖčéčī, ą┐ąŠč湥ą╝čā čā ą╝ąĄąĮčÅ ą┐ąŠ ąŠą┐čĆąŠčüčā ą▒čŗą╗ąĖ ą│ą╗čÄą║ąĖ, čü čŹčéąĖą╝ąĖ ą┐čĆąĖą╝ąĄčĆą░ą╝ąĖ - čćč鹊 čÅ ą┤ąĄą╗ą░ą╗ ąĮąĄ čéą░ą║. ą¤ąŠąĖčüą║ą░ą╗ ą▓ąŠą╗čłąĄą▒ąĮąŠąĄ čüą╗ąŠą▓ąŠ DMA - ąĮąĖč湥ą│ąŠ, ą║čĆąŠą╝ąĄ čāą┐ąŠą╝ąĖąĮą░ąĮąĖčÅ, čćč鹊 čéą░ą║ąŠąĄ čüčāčēąĄčüčéą▓čāąĄčé. ą¤ąŠ ąŠą│ą╗ą░ą▓ą╗ąĄąĮąĖčÄ ą▒ą╗ąĖąĘą║ąŠ ą║ č鹥ą╝ą░ą╝ Curriculum modules, čćč鹊 ąĮą░ čüą░ą╣č鹥 TI. ąÆčĆąŠą┤ąĄ čĆą░ąĘą┤ąĄą╗ ą┐čĆąŠ čüąĖčüč鹥ą╝čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖąĮč鹥čĆąĄčüąĮąĄąĄ - čÅą▓ąĮąŠ ą▒ąŠą╗čīčłąĄ č湥ą╝ ą▓ ą║ąĖčĆčĆąĖą║čāą╗čāą╝ąĄ. ąØąŠ ą┐ąŠ ą┤čĆčāą│ąĖą╝ čĆą░ąĘą┤ąĄą╗ą░ą╝ č鹊ą╗čīą║ąŠ ą║ą░ąČąĄčéčüčÅ, čćč鹊 čüąĄą╣čćą░čü-čüąĄą╣čćą░čü, ą░ čéčāčé čāąČąĄ čüą╗ąĄą┤čāčÄčēą░čÅ ą│ą╗ą░ą▓ą░ ąĖ ą┐čĆąŠ ą┤čĆčāą│ąŠąĄ. ąØąŠ čŹč鹊 ą┐ąŠą║ą░ ą┐ąĄčĆą▓ąŠąĄ ą▓ą┐ąĄčćą░čéą╗ąĄąĮąĖąĄ. p.s. ąÆčŗčÅčüąĮąĖą╗ ą┐čĆąĖčćąĖąĮčā ąĮąĄą░ą┤ąĄą║ą▓ą░čéąĮąŠą│ąŠ ą┐ąŠą▓ąĄą┤ąĄąĮąĖčÅ čĆąŠą▒ąŠčéą░ - ąĮąĄą║ąŠčĆčĆąĄą║čéąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ loop ą▓ eeprom, ą┐ąŠčŹč鹊ą╝čā ąŠčéčĆą░ą▒ą░čéčŗą▓ą░ą╗ąĖ skip-čŗ. ąØąŠ ąŠčłąĖą▒ą║ą░ ą▓ č鹊ą╝, čćč鹊 čŹčéąĖ skip ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čā čāąĘą╗ąŠą▓ ą▒ąĄąĘ čĆą░ąĘą▓ąĄčéą▓ą╗ąĄąĮąĖčÅ.
_________________
ąÉ ą╗čÄą┤ąĖ ą┐ąŠčüą╝ąŠčéčĆčÅčé ąĖ čüą║ą░ąČčāčé: "ąĪąŠą▒ą░ą║ąĖ ą╗ąĄčéčÅčé. ąÆąŠčé ąĖ ąŠčüąĄąĮčī."
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
uldemir
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąŠą║čé 16, 2019 15:50:30 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214
ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
|
ąØčā, ą╝ąŠąČąĄčé, čéą░ą║ ąĖ ąĘą░ą┤čāą╝čŗą▓ą░ą╗ąŠčüčī. ąÆ ą┐čĆąĄą┤ąĖčüą╗ąŠą▓ąĖąĖ ąŠąĮ ąČąĄ ąĮą░ą┐ąĖčüą░ą╗, čćč鹊 č湥ą╗ąŠą▓ąĄą║ čāčćąĖčéčüčÅ ąĮąĄ ą│ą╗ą░ąĘą░ą╝ąĖ ąĖ čāčłą░ą╝ąĖ, ą░ čĆčāą║ą░ą╝ąĖ ąĖ ą╗ąŠą║čéčÅą╝ąĖ(?). ąó.ąĄ.ąĮąĄčäąĖą║ čćąĖčéą░čéčī ą║ąĮąĖąČą║ąĖ ąĖ čüą╗čāčłą░čéčī ą╗ąĄą║čåąĖąĖ, ą▒ąĄčĆąĖčüčī ąĖ čüą┤ąĄą╗ą░ą╣ čćč鹊-ąĮąĖą▒čāą┤čī. ą¤ąŠą║ą░ ą┐ąŠčģąŠąČąĄ, ą▓čüčÅ ą║ąĮąĖąČą║ą░ ą┐ąŠą▓č鹊čĆčÅąĄčé ą║ąĖčĆčĆąĖą║čāą╗čāą╝, ąĮąŠ čćčāč鹊ą║ ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ. ąźąŠčéčÅ, ą┤ą░ - ą┐ąĄčĆą▓čāčÄ ą│ą╗ą░ą▓čā ą┐čĆąŠčćąĖčéą░ą╗, ą▓č鹊čĆčāčÄ - ą┐čĆąŠą╗ąĖčüčéą░ą╗. ąóą░ą╝ ąĮąĖč湥ą│ąŠ ąĖąĮč鹥čĆąĄčüąĮąŠą│ąŠ ą┤ą╗čÅ ą╝ąĄąĮčÅ ąĮąĄ ą▒čŗą╗ąŠ. ą¦čāč鹊ą║ ą┐ąŠčüą╝ąŠčéčĆąĄą╗ ą▓ ą║ąŠąĮčåąĄ, ą│ą┤ąĄ ąĮą░ą┐ąĖčüą░ąĮąŠ ą┐čĆąŠ ąŠą┐ąĄčĆą░čåąĖąŠąĮčŗąĄ čāčüąĖą╗ąĖč鹥ą╗ąĖ, ąĮąŠ ąŠą┐čÅčéčī ąČąĄ ąĮąĄ čāą│ą╗čāą▒ą╗čÅčÅčüčī ą▓ ąĮčÄą░ąĮčüčŗ, ą░ ą▒ąŠą╗čīčłąĄ ą┐čĆąŠ ąĖą┤ąĄą░ą╗čīąĮčŗą╣ ą×ąŻ. ąóčĆąĄčéčīčÄ ą│ą╗ą░ą▓čā čćąĖčéą░ą╗ čü ąĖąĮč鹥čĆąĄčüąŠą╝ - čéą░ą║ ą║ą░ą║ ą░čüčüąĄą╝ą▒ą╗ąĄčĆ ą║ąŠčĆč鹥ą║čüą░ čÅ ąĮąĄ ąĖąĘčāčćą░ą╗, ąĮąŠ čüąĮąŠą▓ą░ ąĮąĄ ąŠč湥ąĮčī ą│ą╗čāą▒ąŠą│ąŠ, ą░ čéą░ą║, čćč鹊ą▒čŗ ą▓ą▓ąĄčüčéąĖ ą▓ ą║čāčĆčü ą┤ąĄą╗ą░. ąØą░ą▓ąĄčĆąĮąŠąĄ, čćč鹊ą▒čŗ ą▒čŗą╗ąŠ ą┐ąŠąĮčÅčéąĮąĄąĄ čćąĖčéą░čéčī čāąČąĄ ąĮą░čüč鹊čÅčēąĖą╣ čĆąĄč乥čĆąĄąĮčü ą╝ą░ąĮčāą░ą╗. ąś, ą║ąŠą│ą┤ą░ čÅ čāąČąĄ čĆą░ąĘą╝ąĄčćčéą░ą╗čüčÅ, čćč鹊 ą▒čāą┤ąĄčé ąĮą░ą┐ąĖčüą░ąĮąŠ, ą║ą░ą║ ą┤ąĄą╗ą░čÄčéčüčÅ ąĖ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ - ą│ą╗ą░ą▓ą░ ąĘą░ą║ąŠąĮčćąĖą╗ą░čüčī. ąØčā ą╝ąŠąČąĄčé čŹč鹊 ą▒čāą┤ąĄčé ą┐ąŠąĘą┤ąĮąĄąĄ... ą▓ ą│ą╗ą░ą▓ąĄ ą┐čĆąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąÉ čéą░ą║, čéčĆąĄčéčīčÅ ą│ą╗ą░ą▓ą░ čģąŠčéčī ąĖ ą┐ąŠą▓č鹊čĆčÅąĄčé ą▓ąĖą┤ąĄąŠą╗ąĄą║čåąĖąĖ, ąĮąŠ ą│ąŠčĆą░ąĘą┤ąŠ ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ. ąóčĆąĄčéčīčÄ ą╗ą░ą▒čā čü ą║ąĮąĖąČą║ąŠą╣ čüą┤ąĄą╗ą░čéčī ą▒čāą┤ąĄčé ą╗ąĄą│č湥, č湥ą╝ ą║ąŠą│ą┤ą░ čÅ ą┐čŗčéą░ą╗čüčÅ ą┤ąĄą╗ą░čéčī č鹊ą╗čīą║ąŠ ą┐čĆąŠčüą╝ąŠčéčĆąĄą▓ ą╗ąĄą║čåąĖąĖ.
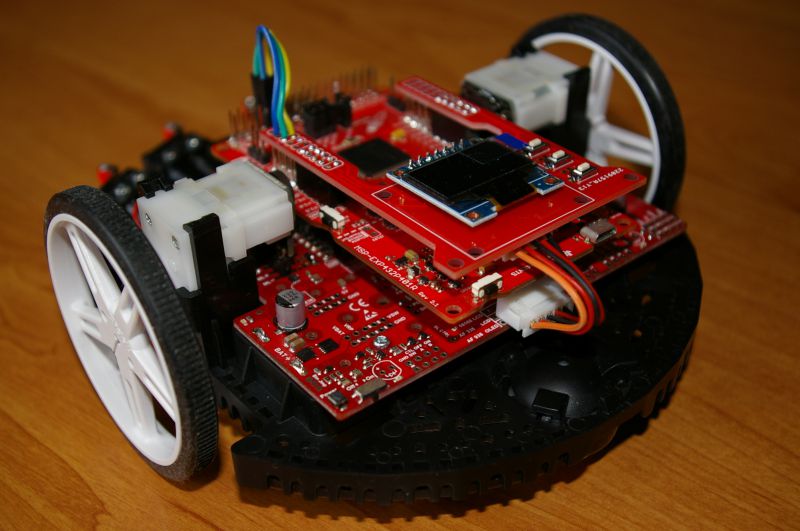
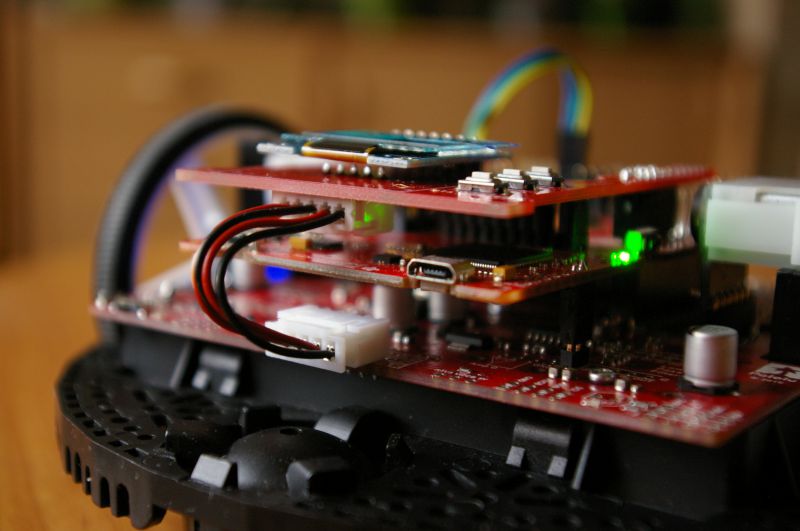
ąØąŠ čéčāčé ą║ąŠ ą╝ąĮąĄ ą▓ ą┐ąŠąĮąĄą┤ąĄą╗čīąĮąĖą║ ąĮą░ą║ąŠąĮąĄčå ą┐čĆąĖą┐ąŠą╗ąĘą╗ą░ ą┐ą╗ą░čéą║ą░ ą┤ą╗čÅ RSLK-MAX. ąÆ ą┐ąĄčĆą▓čŗą╣ ąČąĄ ą▓ąĄč湥čĆ ą┐čĆąĖą║čĆčāčéąĖą╗ ąĄčæ ą║ čłą░čüčüąĖ, ąĮą░ą┤ąĄą╗ ąĮą░ ąĮąĄčæ LaunchPad ąĖ ą▓čüą┐ąŠą╝ąĮąĖą╗ąŠčüčī ą╝ąĮąĄ, čćč鹊 ą▓ ą┐čÅč鹊ą╝ čĆą░ąĘą┤ąĄą╗ąĄ ą▒čŗą╗ą░ ą╗ą░ą▒ą░ ą┐čĆąŠ čüą▒ąŠčĆą║čā ąĖ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖąĄ čĆąŠą▒ąŠčéą░. ąĀąĄčłąĖą╗ ą▓ CCS čüą┤ąĄą╗ą░čéčī ąĄčēąĄ ąŠą┤ąĖąĮ ą▓ąŠčĆą║čüą┐ąĄą╣čü ą┤ą╗čÅ MAX. ąĪą┤ąĄą╗ą░ą╗, ą┐ąŠą┐čŗčéą░ą╗čüčÅ ą┐čĆąŠąĖą╝ą┐ąŠčĆčéąĖčĆąŠą▓ą░čéčī čŹčéąĖ ą┐čĆąŠąĄą║čéčŗ - ąŠčéą║ą░ąĘ. ą¤čĆąĖčćąĖąĮą░ - ą┐čĆąŠąĄą║čéčŗ čüą┤ąĄą╗ą░ąĮčŗ ą▓ ą▓ąĄčĆčüąĖąĖ, ą║ąŠč鹊čĆą░čÅ ąĮąŠą▓ąĄąĄ, č湥ą╝ čā ą╝ąĄąĮčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░. ą¤ąŠčłąĄą╗ ą┤ąĄą╗ą░čéčī ą░ą┐ą│čĆąĄą╣ą┤ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░ą╝ - čüąĮąŠą▓ą░ ąĮąĄčāą┤ą░čćą░. ąØčā, čÅ ąĮąĄ ą┤ąŠą╗ą│ąŠ ą┤čāą╝ą░čÅ čüąĮčæčü CCS ąĖ čüą║ą░čćą░ą╗ čüą▓ąĄąČąĄąĮčīą║ąĖą╣... ąŠą║ą░ąĘčŗą▓ąĄčéčüčÅ čāąČąĄ ąĄčüčéčī ą┤ąĄą▓čÅčéčŗą╣ CCS, ą░ čā ą╝ąĄąĮčÅ čüč鹊čÅą╗ ą▓ąŠčüčīą╝ąŠą╣. ą¤čĆąŠąĖąĮčüčéą░ą╗ąĖčĆąŠą▓ą░ą╗ąŠčüčī ąĖ ą┐čĆąŠąĖą╝ą┐ąŠčĆčéąĖčĆąŠą▓ą░ą╗ąŠčüčī č鹥ą┐ąĄčĆčī čāąČąĄ ą▒ąĄąĘ ą┐čĆąŠą▒ą╗ąĄą╝, ąĮąŠ ąĮą░ą▓ąĄą╗ąŠ ąĮą░ ą╝čŗčüą╗čī, čćč鹊 ąĮą░ ąĮąĄčéą▒čāą║ąĄ čÅ čāąČąĄ čŹčéąĖ ą╗ą░ą▒čŗ ąĮąĄ čüą╝ąŠą│čā ą┐ąŠčüčéą░ą▓ąĖčéčī. ąĢčüą╗ąĖ č鹊ą╗čīą║ąŠ ą▓čĆčāčćąĮčāčÄ.
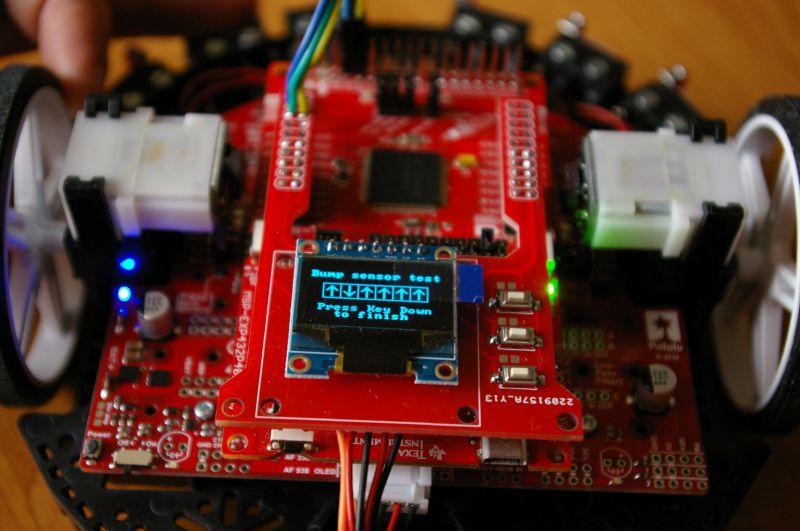
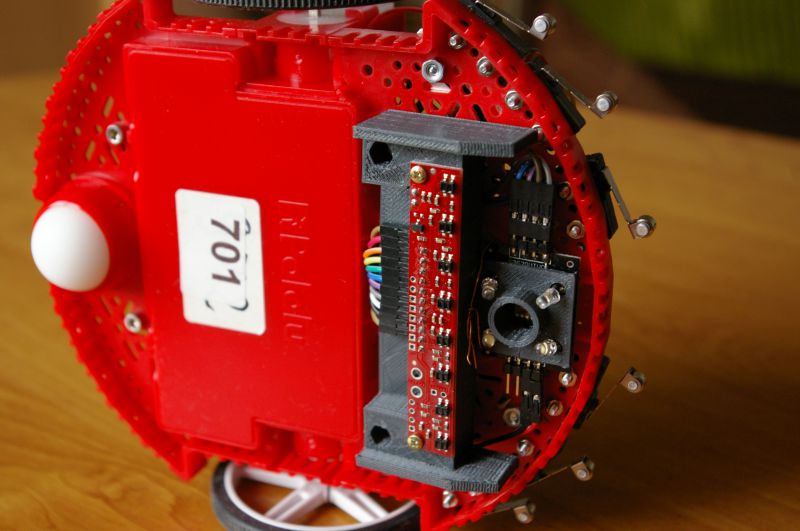
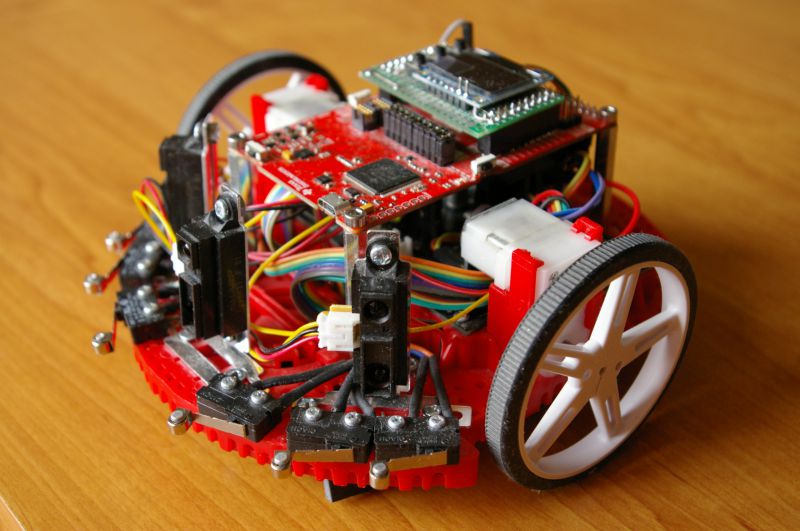
ą¤ąŠčüą╗ąĄ č湥ą│ąŠ, čÅ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ą╗ č鹥čüč鹊ą▓čāčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čā, ąĘą░ą╗ąĖą╗ ą▓ ą╗ą░ąĮčćą┐ą░ą┤ - čĆąŠą▒ąŠčé ąĮą░čćą░ą╗ čĆą░ą┤ąŠčüčéąĮąŠ ą╝ąĖą│ą░čéčī čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ą╝ąĖ - čüąĖąĮąĖą╝ ąĮą░ ą╗ą░ąĮčćą┐ą░ą┤ąĄ ąĖ ą┐ąĄčĆąĄą┤ąĮąĖą╝ąĖ ą┤ą▓čāą╝čÅ ąĮą░ ą┐ą╗ą░č鹥. ąĪąĄąĮčüąŠčĆ ą╗ąĖąĮąĖąĖ ą▓ąĮąĄ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ čĆąŠą▒ąŠčéą░ ą▓čŗą┤ą░ą▓ą░ą╗, čćč鹊 ą╗ąĖąĮąĖčÅ ąĮą░čģąŠą┤ąĖčéčüčÅ ą┐ąŠ čåąĄąĮčéčĆčā. ąØčā čü čŹčéąĖą╝ ąŠą║ą░ąĘą░ą╗ąŠčüčī ą┐čĆąŠčüč鹊 - ąĮą░ą┤ąŠ ą▒čŗą╗ąŠ ą▓čüčéą░ą▓ąĖčéčī ą▒ą░čéą░čĆąĄą╣ą║ąĖ ąĖ ą┐ąŠą┤ą░čéčī ą┐ąĖčéą░ąĮąĖąĄ ąŠčé ąĮąĖčģ. ąóą░ą║ ą║ą░ą║ čā čüčéą░čĆąŠą│ąŠ RSLK 3.3v ą▒čĆą░ą╗ąĖčüčī čü ą┐ą╗ą░čéčŗ ą╗ą░ąĮčćą┐ą░ą┤ą░, ą░ čéčāčé ąĄčüčéčī čüą▓ąŠą╣ čüčéą░ą▒ąĖą╗ąĖąĘą░č鹊čĆ. ą¤ąŠčŹč鹊ą╝čā čüąĄąĮčüąŠčĆ ą┐čĆąŠčüč鹊 ąĮąĄ ą┐ąŠą╗čāčćą░ą╗ ą┐ąĖčéą░ąĮąĖąĄ. ąÆąŠčé čéčāčé ąĖ ąĄčüčéčī ąŠč湥čĆąĄą┤ąĮąŠąĄ ąĮąĄčāą┤ąŠą▒čüčéą▓ąŠ. ąĢčüą╗ąĖ ą▓ čüčéą░čĆąŠą╝ čā ą╝ąĄąĮčÅ ą┐ąŠčćčéąĖ ą▓čüčæ čĆą░ą▒ąŠčéą░ą╗ąŠ ąŠčé USB ą┐ąĖčéą░ąĮąĖčÅ, ą║čĆąŠą╝ąĄ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣ ąĖ čéą░čģąŠą╝ąĄčéčĆą░, č鹊 čéčāčé čāąČąĄ ąĖ čüąĄąĮčüąŠčĆ ą╗ąĖąĮąĖąĖ, ąĖ ą┤ąĖčüą┐ą╗ąĄą╣ (ąĄčüą╗ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą┐ąŠ ąĖąĮčüčéčĆčāą║čåąĖąĖ) č鹊ąČąĄ ąĮąĄ ą▒čāą┤čāčé čĆą░ą▒ąŠčéą░čéčī ą▒ąĄąĘ ą▒ą░čéą░čĆąĄą╣.
ąĪ ą┤ąĖčüą┐ą╗ąĄąĄą╝ ąĘą░čüą░ą┤ą░. ąØąĄ ą╝ąŠą│čā ą┐čĆąĖą┤čāą╝ą░čéčī ą║čāą┤ą░ ąĖ ą║ą░ą║ ąĄą│ąŠ ą┐čĆąĖčüą┐ąŠčüąŠą▒ąĖčéčī. ąÜąĮąŠą┐ą║ąĖ čÅ ą┐čĆąĖą┤čāą╝ą░ą╗, čćč鹊 ą╝ąŠą│čā ą┐ąŠčüą░ą┤ąĖčéčī ąĮą░ ą┐ąŠčĆčéčŗ 10.0, 10.2, 10.3, ąĮąŠ ą▓ąŠčé ą║čāą┤ą░ čäąĖąĘąĖč湥čüą║ąĖ ąĄą│ąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▓ą╝ąĄčüč鹥 čü ą║ąĮąŠą┐ą║ą░ą╝ąĖ - ą┐ąŠą║ą░ ąĮąĄčé čģąŠčĆąŠčłąĄą╣ ą╝čŗčüą╗ąĖ. ąś č鹊 čćč鹊 ąÆą░ą╗ą▓ą░ąĮąŠ ąĮčĆą░ą▓ąĖčéčüčÅ ą┐ą╗ą░čéčā ą╗ą░ąĮčćą┐ą░ą┤ą░ čüčéą░ą▓ąĖčéčī čĆą░ąĘčŖą╝ąŠą╝ ąĮą░ąĘą░ą┤ ą┐čĆąŠą▒ą╗ąĄą╝čā čüą║ąŠčĆąĄąĄ čāčüčāą│čāą▒ą╗čÅąĄčé.
ąóčāčé ą┤čāą╝ą░ą╗, ą░ ą║ą░ą║ ą▒čāą┤čāčé ą┤ą▓ąĖą│ą░č鹥ą╗ąĖ čü 菹Įą║ąŠą┤ąĄčĆą░ą╝ąĖ, čéą░ą║ ąČąĄ ą║čĆąĖą▓ąŠ ąĖą╗ąĖ ąĮąĄčé? ąØčā čéą░ą║ ą║ą░ą║ čÅ ą┐ąŠą║čāą┐ą░ą╗ ąĮąĄ ą║ąŠą╝ą┐ą╗ąĄą║čé, ą░ ą┐ą╗ą░čéčā ąŠčéą┤ąĄą╗čīąĮąŠ, čłą░čüčüąĖ ąŠčéą┤ąĄą╗čīąĮąŠ ąĖ 菹Įą║ąŠą┤ąĄčĆčŗ č鹊ąČąĄ ąŠčéą┤ąĄą╗čīąĮąŠ, č鹊 čüą▒ąŠčĆą║čā čüąĮąŠą▓ą░ ą┤ąĄą╗ą░ą╗ čüą░ą╝. ąś ą║ą░ą║ ąĖ ąŠąČąĖą┤ą░ą╗ąŠčüčī (čüąŠą▒čüčéą▓ąĄąĮąĮąŠ čĆą░ąĘą│ą╗čÅą┤čŗą▓ą░čÅ ą║ą░čĆčéąĖąĮą║ąĖ ąĮą░ čüą░ą╣čéą░čģ Pololu ąĖ TI ą▒čŗą╗ąŠ ą▓ąĖą┤ąĮąŠ), čćč鹊 ąĮąĖč湥ą│ąŠ ąĮąĄ ąĖąĘą╝ąĄąĮąĖą╗ąŠčüčī - čćč鹊ą▒čŗ čĆą░ąĘčŖčæą╝ ą▓ąŠčłąĄą╗ ą▓ ą│ąĮąĄąĘą┤ąŠ ąĮą░ ą┐ą╗ą░č鹥, ąĮą░ą┤ąŠ ąĖą╗ąĖ ą┐ą╗ą░čéčā 菹Įą║ąŠą┤ąĄčĆą░ ą║čĆąĖą▓ąŠ ą┐čĆąĖą┐ą░ąĖą▓ą░čéčī, ąĖą╗ąĖ čĆą░ąĘčŖčæą╝ ą▓ą┐ą░ąĖą▓ą░čéčī ą▒ąĄąĘ ąŠą▒ąŠą╣ą╝čŗ. ąśąĮč鹥čĆąĄčüąĮąŠ ą║ą░ą║ ąĖąĘą│ąŠč鹊ą▓ąĖč鹥ą╗ąĖ ą║ąŠą╝ą┐ą╗ąĄą║čéą░ ąĄą│ąŠ ą┐čĆąĖą┐ą░ąĖą▓ą░čÄčé? ąÆ čüą╝čŗčüą╗ąĄ čü ąĮčāąČąĮąŠą╣ ą║čĆąĖą▓ąĖąĘąĮąŠą╣.
ąóąĄčüč鹊ą▓ą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą╗ąĖąĮąĖčÄ ą▓ąĖą┤ąĖčé, ą┤ą░ąČąĄ ąĮąĄčüą╝ąŠčéčĆčÅ ąĮą░ č鹊, čćč鹊 čĆą░čüčüč鹊čÅąĮąĖąĄ ąŠčé čüąĄąĮčüąŠčĆą░ ą┤ąŠ ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéąĖ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą▒ąŠą╗čīčłąŠąĄ. ąØąŠ čÅ čāąČąĄ čĆą░ąĘą╝čŗčłą╗čÅą╗ ąŠą▒ čŹč鹊ą╝ ąĖ ą╝ąŠą╣ ą▓čŗą▓ąŠą┤, čćč鹊 ą┐čĆąĖą╝ąĄąĮąĄąĮčŗ čüąĄąĮčüąŠčĆčŗ čü ą╗ąĖąĮąĘą░ą╝ąĖ. ąÜą░ą║ąŠą╣ ąĖą╝ąĄąĮąĮąŠ čüąĄąĮčüąŠčĆ čüč鹊ąĖčé čéą░ą╝ čÅ ąĮąĄ ąĮą░čłąĄą╗, ąĮąŠ ąĮą░čłąĄą╗ ą┐ąŠčģąŠąČąĖą╣ (ą░ ą╝ąŠąČąĄčé čŹč鹊 ąŠąĮ ąĖ ąĄčüčéčī) čłą░čĆą┐ąŠą▓čüą║ąĖą╣. ąóą░ą║ ą┐čĆąŠ ąĮąĄą│ąŠ ąĮą░ą┐ąĖčüą░ąĮąŠ, čćč鹊 čā čŹčéąĖčģ ą╗ąĖąĮąĘ č乊ą║čāčüąĮąŠąĄ čĆą░čüčüč鹊čÅąĮąĖąĄ 3ą╝ą╝. ą¤ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ ą▒čāą┤čāčé ą║ąŠą│ą┤ą░ ą┐ąŠą┤ą║ą╗čÄčćčā ą┤ąĖčüą┐ą╗ąĄą╣ ąĖ čāą▓ąĖąČčā ą│ąĖčüč鹊ą│čĆą░ą╝ą╝čŗ. ąØąŠ č鹊, čćč鹊 čüąĄąĮčüąŠčĆ ą┤ąĄčƹȹĖčéčüčÅ č鹊ą╗čīą║ąŠ ąĘą░ čüč湥čé čĆą░ąĘčŖčæą╝ą░ ąĮąĄ ąŠč湥ąĮčī ąĘą┤ąŠčĆąŠą▓ąŠ. ąÆčŗą┐ą░ą┤ą░čéčī ąĖąĘ čĆą░ąĘčŖčæą╝ą░ - ąĮąĄ ą▓čŗą┐ą░ą┤ą░ąĄčé, ąĮąŠ ą▓ą┐ąĄčĆąĄą┤-ąĮą░ąĘą░ą┤ čüą▓ąŠą▒ąŠą┤ąĮąŠ ą▓ čĆą░ąĘčŖčæą╝ąĄ ą║ą░čćą░ąĄčéčüčÅ. ąØčā ąĖ, ą║ąŠąĮąĄčćąĮąŠ, čüą╝čāčēą░ąĄčé ą╝ąĄąĮčīčłąĄąĄ čĆą░čüč鹊čÅąĮąĖąĄ čüąĄąĮčüąŠčĆą░ ąŠčé ąŠčüąĖ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣. ąźąŠčéčÅ, čÅ čéčāčé ą┤ąŠą▒ą░ą▓ąĖą╗ ą▓ ą╝ąĄąĮčÄ ąĄčēąĄ č鹥čüčé č鹊čĆą╝ąŠąĘą░ - čĆąŠą▒ąŠčé ąĖą┤čæčé ą┐ąŠ ą╗ąĖąĮąĖąĖ ą┤ąŠ čéčāą┐ąĖą║ą░ ąĖą╗ąĖ čĆą░ąĘą▓ąĖą╗ą║ąĖ ąĖ ąĮą░čćąĖąĮą░ąĄčé č鹊čĆą╝ąŠąĘąĖčéčī, ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąŠč鹊ą▒čĆą░ąČą░čÅ ą┐čĆąŠą╣ą┤ąĄąĮąĮčŗą╣ ą┐čāčéčī čü ąĮą░čćą░ą╗ą░ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ ą▓ ą╝ąĖą╗ą╗ąĖą╝ąĄčéčĆą░čģ. ą×ą║ą░ąĘą░ą╗ąŠčüčī, ą┐čĆąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ, č鹊čĆą╝ąŠąĘąĮąŠą╣ ą┐čāčéčī ą▒čŗą╗ 45-47ą╝ą╝.
_________________
ąÉ ą╗čÄą┤ąĖ ą┐ąŠčüą╝ąŠčéčĆčÅčé ąĖ čüą║ą░ąČčāčé: "ąĪąŠą▒ą░ą║ąĖ ą╗ąĄčéčÅčé. ąÆąŠčé ąĖ ąŠčüąĄąĮčī."
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Ser60
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąŠą║čé 16, 2019 17:21:02 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 74
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 607
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą┤ąĄą║ 24, 2008 09:58:58
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3715
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 3
|
|
ąĪ ąĖąĮč鹥čĆąĄčüąŠą╝ čćąĖčéą░čÄ ąÆą░čłąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠ ą┐čĆąĖą║ą╗čÄč湥ąĮąĖčÅčģ ą▓ ą╝ąĖčĆąĄ čĆąŠą▒ąŠčéąĖą║ąĖ. ą£ąŠąČąĄčé čüąĄąĮčüąŠčĆ ąĮą░ ą║ą╗ąĄą╣ ą┐ąŠčüą░ą┤ąĖčéčī, čćč鹊ą▒čŗ ą▓ čĆą░ąĘčŖčæą╝ąĄ ąĮąĄ ą▒ąŠą╗čéą░ą╗čüčÅ - ąĖą╗ąĖ čģąŠčéąĖč鹥 ąĖą╝ąĄčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą╝ąĄąĮčÅčéčī čüąĄąĮčüąŠčĆ? ąśąĮč鹥čĆąĄčüąĮąŠ ą║ą░ą║ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ 菹║čüčéčĆąĄąĮąĮąŠąĄ č鹊čĆą╝ąŠąČąĄąĮąĖąĄ - ąĘą░ą║ąŠčĆą░čćąĖą▓ą░ąĄč鹥 ą┐ąŠą╗čÄčüą░ ą╝ąŠč鹊čĆą░ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ ąĖą╗ąĖ ą║čĆą░čéą║ąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą║ąŠą╗čæčüą░ ąĮą░ąĘą░ą┤ ą║čĆčāčéąĖč鹥?
ą» čéą░ą║ąČąĄ "čćąĖčéą░ą╗" ą║ąĮąĖą│čā ąÆą░ą╗čīą▓ą░ąĮąŠ ą┐ąŠ ą×ąĪ, čäą░ą║čéąĖč湥čüą║ąĖ ą┐čĆąŠą╗ąĖčüčéčŗą▓ą░čÅ ąĄčæ, čé.ą║. ąĮąĖč湥ą│ąŠ ąĮąŠą▓ąŠą│ąŠ ą┤ą╗čÅ čüąĄą▒čÅ ą▓ ąĮąĄą╣ ąĮąĄ ąĮą░čłčæą╗. ąöčāą╝ą░čÄ, čŹč鹊 ąĮąĄ ą┐ąŠč鹊ą╝čā, čćč鹊 čÅ č湥ą│ąŠ-č鹊 čüą╗ąĖčłą║ąŠą╝ ą╝ąĮąŠą│ąŠ ąĘąĮą░čÄ, ą░ čüą║ąŠčĆąĄąĄ, čćč鹊 ąŠąĮ ą╝ą░ą╗ąŠ ąŠ čćčæą╝ "ą┐ąŠ ą┤ąĄą╗čā" ą┐ąĖčłąĄčé. ąÉčüčüąĄą╝ą▒ą╗ąĄčĆ ąÉąĀą£ čÅ čüą░ą╝ ą┐čĆąĄą┐ąŠą┤ą░čÄ, ą╝ąŠą│čā ą┐ąŠčĆąĄą║ąŠą╝ąĄąĮą┤ąŠą▓ą░čéčī čģąŠčĆąŠčłčāčÄ ą║ąĮąĖą│čā, ąĄčüą╗ąĖ ąĖąĮč鹥čĆąĄčüąĮąŠ. ąÜčāčĆčü ą┐ąŠ ą×ąĪ č鹊ąČąĄ čüą░ą╝ ą┐čĆąĄą┐ąŠą┤ą░čÄ, ąŠą┤ąĮą░ą║ąŠ čéą░ą╝ čāą┐ąŠčĆ čüą║ąŠčĆąĄąĄ ąĮą░ "ą▒ąŠą╗čīčłąĖąĄ" ą×ąĪ ąĮąĄąČąĄą╗ąĖ č湥ą╝ ąĮą░ RTOS. ąÆ čŹč鹊ą╝ ą│ąŠą┤čā, ąŠą┤ąĮą░ą║ąŠ, ą┐ą╗ą░ąĮąĖčĆčāčÄ čĆą░čüčłąĖčĆąĖčéčī č鹥ą╝čā ą┐ąŠ RTOS ą▓ ą║čāčĆčüąĄ čü čāą┐čĆą░ąČąĮąĄąĮąĖčÅą╝ąĖ ąĮą░ čüąĖą╗ą╗ą░ą▒ąŠą▓čüą║ąĖčģ ą┤ąĄą╝ąŠ-ą┐ą╗ą░čéą░čģ - ąŠąĮąĖ ą┤ą░ąČąĄ ąĮą░ą╝ ą┐ą╗ą░čéčŗ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą┐ąŠą┤ąŠą│ąĮą░ą╗ąĖ, čüą┐ą░čüąĖą▒ąŠ ąĖą╝. ąöčāą╝ą░čÄ, čćč鹊 ą▓ ą▓ąĖą┤ąĄąŠ ąĖ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą╝ąĄąĮąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ, čé.ą║. ąŠąĮąĖ ąŠčéčćą░čüčéąĖ čĆąĄą║ą╗ą░ą╝ą░ ą┐čĆąŠą┤čāą║čåąĖąĖ ąĖ ąĄčüą╗ąĖ ąĖčģ ąŠčéčÅą│ąŠčéąĖčéčī ą┤ąĄčéą░ą╗čÅą╝ąĖ, č鹊 ąĄčüčéčī ąŠą┐ą░čüąĮąŠčüčéčī ą┐ąŠč鹥čĆčÅčéčī čćą░čüčéčī ą░čāą┤ąĖč鹊čĆąĖąĖ. ąźąŠčéčÅ ą╝ąĮąŠą│ąĖąĄ ą┐čĆąĄą┤čüčéą░ą▓ąĖč鹥ą╗ąĖ ą╝ąŠą╗ąŠą┤ąŠą│ąŠ ą┐ąŠą║ąŠą╗ąĄąĮąĖčÅ ą┐čĆąĄą┤ą┐ąŠčćąĖčéą░čÄčé čāčćąĖčéčüčÅ čüąĄą│ąŠą┤ąĮčÅ ą┐ąŠ ą▓ąĖą┤ąĄąŠ. ąØąŠ čÅ ą┐ąŠą║ą░ ąĮąĄ ą▓čüčéčĆąĄčćą░ą╗ ą┤ąŠčüčéą░č鹊čćąĮąŠą│ąŠ ą┐ąŠą┤čĆąŠą▒ąĮąŠą│ąŠ ą▓ąĖą┤ąĄąŠ, ą┐ąŠą║čĆčŗą▓ą░čÄčēąĄą│ąĖ ą▓čüąĄ ąĮčÄą░ąĮčüčŗ ą┐čĆąŠą┤čāą║čåąĖąĖ. ąÆ ą┤čĆčāą│ąĖčģ ą┤ąĖčüčåąĖą┐ą╗ąĖąĮą░čģ ą┤ąĄą╗ąŠ ąŠą▒čüč鹊ąĖčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ąĖąĮą░č湥. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą▓ ą║čāčĆčüą░čģ ą┐ąŠ ą╝ą░č鹥ą╝ą░čéąĖą║ąĄ ą▓ąĖą┤ąĄąŠ ąŠč湥ąĮčī ą┐ąŠą┤čĆąŠą▒ąĮčŗąĄ, ą┤ą░ąČąĄ č湥čĆąĄąĘčćčāčĆ - čéą░ą╝ ąĮąĄčé ąŠą┐ą░čüąĮąŠčüčéąĖ ą┐ąŠč鹥čĆčÅčéčī ą║ą╗ąĖąĄąĮč鹊ą▓. ąöą░ąČąĄ ąĮą░ąŠą▒ąŠčĆąŠčé - ą┤ą╗čÅ ąĮą░čāą║ąĖ ąĖąĮč鹥čĆąĄčü ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé č鹥, ą║č鹊 "ą▓čŗąČąĖą▓ąĄčé". ąóą░ą║ čćč鹊 ą┐ąŠą║ą░ ą║ąĮąĖą│ąĖ ą┐ąŠ ą╝ąĖą║čĆąŠčŹą╗ąĄą║čéčĆąŠąĮąĖą║ąĄ ąĮą░ čüąĄą│ąŠą┤ąĮčÅ ą▒ąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮčŗą╣ ąĖčüč鹊čćąĮąĖą║ ąĘčćą░ąĮąĖą╣. ą¤ąŠą║čāą┐ą░čÅ ąĖčģ, čÅ ąĮą░ą┤ąĄčÄčüčī ąĮą░ą╣čéąĖ ą▓ ąĮąĖčģ čćč鹊-č鹊 ą▒ąŠą╗ąĄąĄ, č湥ą╝ ą╝ąŠąČąĮąŠ ą┐čĆąŠčćąĖčéą░čéčī ą▓ ąöą©, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąŠą┐čŗčé čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░. ąÆ čŹč鹊ą╝ ą┐ą╗ą░ąĮąĄ ąĖą┤ąĄą░ą╗čīąĮąŠą╣ čüčćąĖčéą░čÄ ą║ąĮąĖą│čā Davies ą┐ąŠ MSP430. ąźąŠčéčÅ ąŠąĮą░ čāąČąĄ čāčüčéą░čĆąĄą╗ą░ ąĖ ąĮąĄ ą┐ąŠą║čĆčŗą▓ą░ąĄčé čüąŠą▓čĆąĄą╝ąĄąĮąĮčŗčģ ą╝ąŠą┤ąĄą╗ąĄą╣ čü FRAM, ąĮą░ ąĄčæ č乊ąĮąĄ ą╝ąĮąŠą│ąĖąĄ ą┤čĆčāą│ąĖąĄ ą║ąĮąĖą│ąĖ ąĮąĄ ą║ąŠčéąĖčĆčāčÄčéčüčÅ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
uldemir
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąŠą║čé 16, 2019 19:23:29 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214
ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
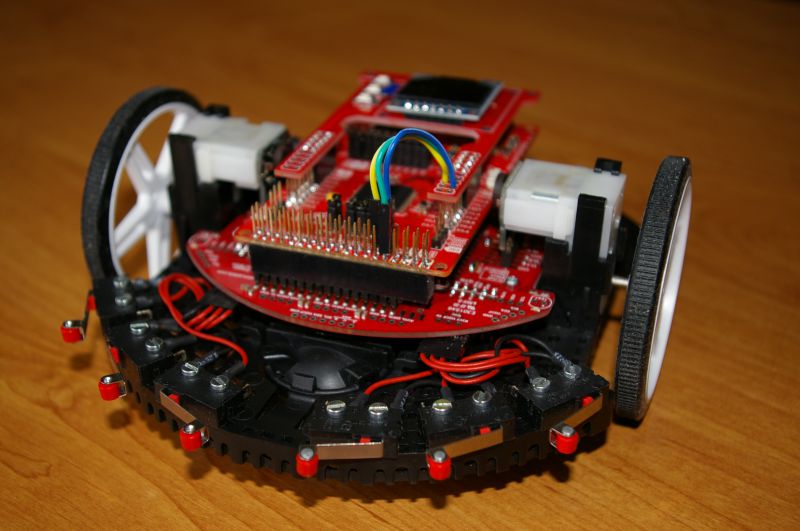
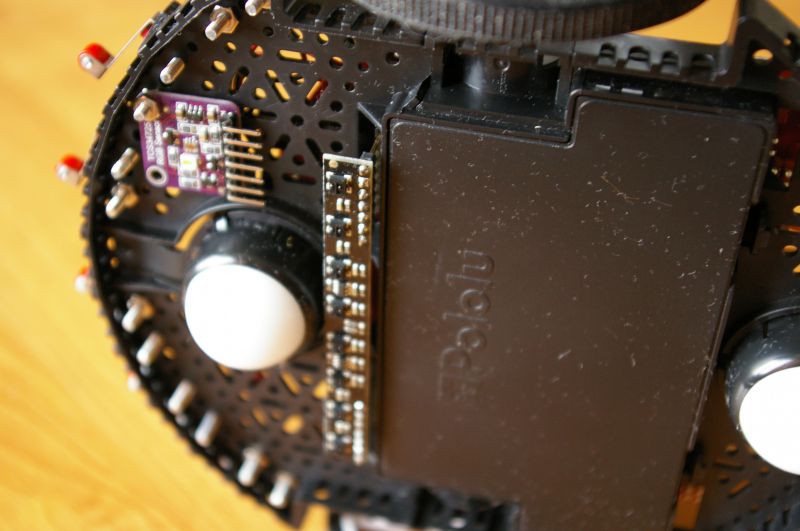
ą£ą┤ą░, ąĖą╝ąĄąĮąĮąŠ "ąŠą┐čŗčé čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░". ąĢčüą╗ąĖ čüč乊čĆą╝čāą╗ąĖčĆąŠą▓ą░čéčī, čćč鹊 čÅ ąČą┤ą░ą╗ ąŠčé čŹč鹊ą╣ ą║ąĮąĖą│ąĖ - č鹊 ąĖą╝ąĄąĮąĮąŠ čŹč鹊. ą×čéą▓ąĄčé ąĮą░ ą▓ąŠą┐čĆąŠčü, ą┤ą╗čÅ č湥ą│ąŠ čüą┤ąĄą╗ą░ąĮčŗ č鹥 ąĖą╗ąĖ ąĖąĮčŗąĄ čĆą░ąĘčŖčæą╝čŗ, ąÜčāą┤ą░ ą┐čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ąĄčéčüčÅ čćč鹊 ą┐ąŠą┤ą║ą╗čÄčćą░čéčī. ąÆąŠčé čéčāčé ą┐ąŠą┐čāčéąĮąŠ čĆą░ąĘą╝čŗčłą╗čÅą╗ ą┐čĆąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą┤ą░ą╗čīąĮąŠą╝ąĄčĆąĮčŗčģ čüąĄąĮčüąŠčĆąŠą▓. ąÆčĆąŠą┤ąĄ ą║ą░ą║ ą▓ą┐ąĄčĆąĄą┤ąĖ ąĄčüčéčī ą╝ąĄčüčéą░ ą┤ą╗čÅ ąĖčģ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ, ąĮąŠ ąĄčüą╗ąĖ čģąŠč湥čéčüčÅ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░čéčī ążąØą¦, ą║ąŠč鹊čĆčŗą╣ ąĄčüčéčī ąĮą░ ą┐ą╗ą░č鹥, č鹊 ą┐ąŠą║ą░ ąĮąĄ ą▓ąĖąČčā ą║ą░ą║ čŹč鹊 ą╝ąŠąČąĮąŠ ą┐ąĄčĆąĄą║ąŠą╝ą╝čāčéąĖčĆąŠą▓ą░čéčī, ą║čĆąŠą╝ąĄ ą║ą░ą║ ą┐čĆąŠčéčÅąĮčāčéčī ą┐čĆąŠą▓ąŠą┤ą░ ą┤ąŠ čĆą░ąĘčŖčæą╝ą░ ążąØą¦ (ą║ąŠč鹊čĆčŗą╣ ąĮą░čģąŠą┤ąĖčéčüčÅ čüąĘą░ą┤ąĖ!) ąĖ čü ą▓čŗčģąŠą┤ą░ čŹč鹊ą│ąŠ ążąØą¦ čüąĮąŠą▓ą░ ą▓ą┐ąĄčĆąĄą┤? ąÜą░ą║, ą▓ą┐čĆąŠč湥ą╝, ą▓ 15-ą╣ ą╗ą░ą▒ąĄ (Data acquisition systems) ąĖ ąĮą░čĆąĖčüąŠą▓ą░ąĮąŠ. ąĢčēąĄ ąŠčéą╗ąĖčćąĖąĄ čüčéą░čĆąŠą│ąŠ RSLK ąŠčé MAX - čüčéą░čĆąŠą╝čā ą▓ ą║ąŠą╝ą┐ą╗ąĄą║č鹥 čłą╗ąĖ čéą░ąĮčéą░ą╗ąŠą▓čŗąĄ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆčŗ ą║ąŠč鹊čĆčŗąĄ ąĮčāąČąĮąŠ ą▒čŗą╗ąŠ ąĮą░čüą░ą┤ąĖčéčī ąĮą░ ą▓čŗą▓ąŠą┤čŗ ą┐ąĖčéą░ąĮąĖčÅ čŹčéąĖčģ proximity čüąĄąĮčüąŠčĆąŠą▓, ą░ ą┤ą╗čÅ MAX čāąČąĄ ąĮąĄčé (ą▓ąŠ ą▓čüčÅą║ąŠą╝ čüą╗čāčćą░ąĄ ąĮąĖą│ą┤ąĄ ąĮąĄ ą▓ąĖąČčā ą┐čĆąŠ čŹč鹊 čāą┐ąŠą╝ąĖąĮą░ąĮąĖąĄ ąĖ ąĮą░ ą║ą░čĆčéąĖąĮą║ą░čģ č鹊ąČąĄ ąĮąĄ ą▓ąĖą┤ą░čéčī). ąÆąĖą┤ąĖą╝ąŠ, ążąØą¦ ą╗čāčćčłąĄ ą┐ąŠą┤ą░ą▓ą╗čÅąĄčé čłčāą╝čŗ čŹčéąĖčģ čüąĄąĮčüąŠčĆąŠą▓. ąóąŠčĆą╝ąŠąČąĄąĮąĖąĄ ą┤ąĄą╗ą░ą╗, čĆą░ąĘčāą╝ąĄąĄčéčüčÅ, ąĘą░ą║ąŠčĆą░čćąĖą▓ą░ąĮąĖąĄą╝. ąöą╗čÅ ąĖąĮą▓ąĄčĆčüąĖąĖ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ąĮą░ą┤ąŠ ą▒čŗ čāąČąĄ čćč鹊ą▒čŗ ą¤ąśąö čĆą░ą▒ąŠčéą░ą╗. ąÉ ąĄą│ąŠ ąĄčēąĄ ąĮąĄ čüą┤ąĄą╗ą░ą╗, ą┤ą░ ąĖ ą╗ą░ą▒ą░ ąŠčüčéą░ą╗ą░čüčī ąĮą░ ą┐ąŠą╗-ą┐čāčéąĖ. ąÆčĆąŠą┤ąĄ ą║ą░ą║ ą║ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĮą░ą┐ąĖčüą░ą╗, ąĮąŠ ąĘą░čéą║ąĮčāą╗čüčÅ ąĮą░ ą▓ąĄą╗ąĖčćąĖąĮąĄ ąĘą░ą┤ą░ą▓ą░ąĄą╝čŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓. ą¦č鹊 ąĘą░ą┤ą░ą▓ą░čéčī čüą║ąŠčĆąŠčüčéčī, RPM ąĖ ą▓ ą║ą░ą║ąĖčģ ą┐čĆąĄą┤ąĄą╗ą░čģ čŹčéąĖ ą▓ąĄą╗ąĖčćąĖąĮčŗ ą┤ąŠą╗ąČąĮčŗ ąĮą░čģąŠą┤ąĖčéčīčüčÅ. ąĪ ą┤čĆčāą│ąŠą╣ čüč鹊čĆąŠąĮčŗ, ą▓ ą╗ą░ą▒ąŠčĆą░č鹊čĆąĮąŠą╣, ąÆą░ą╗ą▓ą░ąĮąŠ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčé ąŠą│čĆą░ąĮąĖčćąĖčéčī čāą┐čĆą░ą▓ą╗čÅčÄčēąĄąĄ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖąĄ 2 < UL <15000. 15000 - čŹč鹊 ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ 100% PWM. ąó.ąĄ. ą┐ąŠą┤ą░čćą░ ąŠą▒čĆą░čéąĮąŠą╣ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ąĮąĄ ą┐čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ąĄčéčüčÅ. ąØąŠ, ą▓ąŠąĘą╝ąŠąČąĮąŠ, čŹč鹊 ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ą┤ą╗čÅ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣ čā ąĮąĄą│ąŠ ąŠčéą┤ąĄą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ - ąĄčģą░čéčī ą▓ą┐ąĄčĆąĄą┤, ąĄčģą░čéčī ąĮą░ąĘą░ą┤ ąĖčéą┤. ąó.ąĄ. ąĄčüą╗ąĖ UL ą▒čāą┤ąĄčé ą╝ąĄąĮčīčłąĄ 0, ąĮčāąČąĮąŠ ą▓čŗąĘčŗą▓ą░čéčī ą┤čĆčāą│čāčÄ čäčāąĮą║čåąĖčÄ (ą░ ąĮąĄ ą║ą░ą║ čā ą╝ąĄąĮčÅ - ąŠą┤ąĮą░ ąĮą░ ą▓čüąĄ čüą╗čāčćą░ąĖ ąČąĖąĘąĮąĖ). ąÜčüčéą░čéąĖ, ą▓ čüą░ą╝ąŠą╝ ą┐ąĄčĆą▓ąŠą╝ ą▓ąĖą┤ąĄąŠ "TI-RSLK MAX Module 1 - Lecture video - Running code on the LaunchPad using CCS" ą▓ čüą░ą╝ąŠą╝ ąĮą░čćą░ą╗ąĄ ąĮą░ 菹║čĆą░ąĮąĄ ą▓ąĖą┤ąĄąĮ ąĖą╝ąĄąĮąĮąŠ ą║čāčüąŠą║ ą║ąŠą┤ą░ ąĖąĘ 17-ą╣ ą╗ą░ą▒čŗ. ąÆčŗč鹥ą║ą░čÅ ąĖąĘ čŹč鹊ą│ąŠ, ąĄčēąĄ čĆą░ąĘą╝čŗčłą╗čÅčÄ ąĖ ąĮą░ą┤ąĄčÄčüčī ą│ą┤ąĄ-ąĮąĖą▒čāą┤čī čāąĘąĮą░čéčī "ąŠą┐čŗčé čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░" ąĮčāąČąĮąŠ ą╗ąĖ ą┤ąĄą╗ą░čéčī 3 ąŠčéą┤ąĄą╗čīąĮčŗčģ ą║ąŠąĮčéčāčĆą░ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ ąĖą╗ąĖ ą┤ąŠčüčéą░č鹊čćąĮąŠ ąŠą┤ąĮąŠą│ąŠ ąŠą▒čēąĄą│ąŠ. ąó.ąĄ. ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▓ čĆąŠą▒ąŠč鹥 ą▒ąĄą│čāčēąĄą╝ ą┐ąŠ ą╗ąĖąĮąĖąĖ ąŠą┤ąĖąĮ ąŠą▒čēąĖą╣ ą║ąŠąĮčéčāčĆ: ą▓ ą║ą░č湥čüčéą▓ąĄ "ąĘą░ą┤ą░čéčćąĖą║ą░" ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠą║ą░ąĘą░ąĮąĖą╣ čüąĄąĮčüąŠčĆą░ ą╗ąĖąĮąĖąĖ. ąś ąĄčüą╗ąĖ ąĄčüčéčī ąŠčéą║ą╗ąŠąĮąĄąĮąĖąĄ - čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ, čāčüą║ąŠčĆąĖčéčī ąĖą╗ąĖ ąĘą░ą╝ąĄą┤ą╗ąĖčéčī čü ąĮąĄą║ąŠč鹊čĆčŗą╝ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą╝ ą┤ą▓ąĖą│ą░č鹥ą╗ąĖ. ąó.ąĄ. ą╝ąĮąĄ ą▒ąĄąĘ čĆą░ąĘąĮąĖčåčŗ ą║ą░ą║ąĖąĄ ąŠą▒ąŠčĆąŠčéčŗ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ą▓ ą┤ą░ąĮąĮčŗą╣ ą╝ąŠą╝ąĄąĮčé, čéą░ą║ ą║ą░ą║ čÅ ą┐ąŠ čüąĄąĮčüąŠčĆčā ą▓ąĖąČčā ąŠčéą║ą╗ąĖą║ - ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą╗ąĖąĮąĖčÅ ąĮą░ ą╝ąĄčüč鹊 ąĖą╗ąĖ ąĮąĄčé. ąÜąŠąĮąĄčćąĮąŠ, čāą┐čĆą░ą▓ą╗čÅčÄčēąĄąĄ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖąĄ ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮąŠ-ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠąĄ. ąśąĮč鹥čĆąĄčüąĮąŠ ą▒čŗą╗ąŠ ą┐ąŠą┤ą▒ąĖčĆą░čéčī čŹčéąĖ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ, ą║ąŠą│ą┤ą░ čüą║ąŠčĆąŠčüčéčī čĆąŠą▒ąŠčéą░ ą▒čŗą╗ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ąĮčāą╗ąĄą▓ąŠą╣ ąĖ ą║ą░ą║ ąŠąĮ čüč鹊čÅ ąĮą░ ą╝ąĄčüč鹥 ąĖ č鹊ą╗čīą║ąŠ ą▓čĆą░čēą░čÅčüčī ą▓ąŠą║čĆčāą│ čåąĄąĮčéčĆą░ ąŠčüąĄą╣ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ą╗ čüąĄąĮčüąŠčĆ ą┐ąŠ čüąĄčĆąĄą┤ąĖąĮąĄ ą╗ąĖąĮąĖąĖ, čü ąŠčüčåąĖą╗ą╗ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ąĖą╗ąĖ ąĮąĄčé. ąÉ ąĘą░č鹥ą╝ ą┐čŗčéą░čÅčüčī ą┐ą░ą╗čīčåąĄą╝ čüą┤ą▓ąĖąĮčāčéčī, ąĮą░ą▒ą╗čÄą┤ą░čéčī ą║ą░ą║ čĆąŠą▒ąŠčé čüą▓ąŠąĖą╝ąĖ ą║ąŠą╗čæčüą░ą╝ąĖ ą┐čĆąŠčéąĖą▓ąŠą┤ąĄą╣čüčéą▓čāąĄčé čŹč鹊ą╝čā. ąśą╗ąĖ ą▓čüčæ ąČąĄ ąĮą░ą┤ąŠ ą┐ąŠ ąŠčéą║ą╗ąŠąĮąĄąĮąĖčÄ ąĘą░ą┤ą░ą▓ą░čéčī, čćč鹊ą▒čŗ čŹč鹊 ą║ąŠą╗ąĄčüąŠ ą║čĆčāčéąĖą╗ąŠčüčī čéą░ą║, ą┤čĆčāą│ąŠąĄ - ąĖąĮą░č湥 ąĖ čāąČąĄ ąĮą░ ą║ą░ąČą┤ąŠą╝ ą║ąŠą╗ąĄčüąĄ ąĄčēąĄ ąĖ čéą░ą╝ čüą▓ąŠą╣ ą¤ąśąö čĆąĄą│čāą╗čÅč鹊čĆ ą┐čŗčéą░ą╗čüčÅ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ąĘą░ą┤ą░ąĮąĮčŗąĄ "čüą▓ąĄčĆčģčā" ąŠą▒ąŠčĆąŠčéčŗ. ą¤ąŠč湥ą╝čā-č鹊 ą╝ąĮąĄ ą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 ą▓ 17-ą╣ ą╗ą░ą▒ąĄ ąĘą░ą┤čāą╝ą░ąĮ ąĖą╝ąĄąĮąĮąŠ ą▓č鹊čĆąŠą╣ ą┐ąŠą┤čģąŠą┤, ąĮąŠ ąĮąĖą║ą░ą║ąĖčģ čĆčāą║ąŠą▓ąŠą┤čÅčēąĖčģ čāą║ą░ąĘą░ąĮąĖą╣ ą▓ čüčéą░čĆąŠą╣ ą╗ą░ą▒ąĄ ąĮąĄčé. ąóąŠą╗čīą║ąŠ "ąĮą░ą┐ąĖčłąĖč鹥 ąĖ ą▓čüčæ". ąØą░ą┤ąĄčÄčüčī, čćč鹊 ą▓ ą║ąĮąĖąČą║ąĄ ąĮą░ą╣ą┤čā ąŠčéą▓ąĄčéčŗ ąĮą░ čŹčéąĖ ą▓ąŠą┐čĆąŠčüčŗ. ąÆąŠ ą▓čüčÅą║ąŠą╝, čüą╗čāčćą░ąĄ čéą░ą╝ ą▓ąĖą┤ąĄą╗ čĆąĖčüčāąĮąŠą║ "ą│ąĄąŠą╝ąĄčéčĆąĖąĖ ą┐ąŠą▓ąŠčĆąŠčéą░ čĆąŠą▒ąŠčéą░ čü ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╝ ą┐čĆąĖą▓ąŠą┤ąŠą╝" ąÆąŠčé čü čŹčéąĖą╝ąĖ ą┐ąŠą▓ąŠčĆąŠčéą░ą╝ąĖ ąĖ čüąĄąĮčüąŠčĆąŠą╝ ą╗ąĖąĮąĖąĖ ąĮą░čĆąĖčüąŠą▓ą░ą╗ą░čüčī čüą╗ąĄą┤čāčÄčēą░čÅ ą┐čĆąŠą▒ą╗ąĄą╝ą░. ąöą╗čÅ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ąøčÄą║ą░-ąóčĆąĄą╝ąŠ ą╝ąĮąĄ ąĮčāąČąĮąŠ, čćč鹊ą▒čŗ čĆąŠą▒ąŠčé čĆą░ąĘą▓ąŠčĆą░čćąĖą▓ą░ą╗čüčÅ ąĮąĄ č鹊ą╗čīą║ąŠ ą▓ čéčāą┐ąĖą║ą░čģ, ąĮąŠ ąĖ ąĮą░ "ą┐ąŠčüąĄčēąĄąĮąĮčŗčģ" ą┐ąĄčĆąĄą║čĆčæčüčéą║ą░čģ ą▓ ąĮąĄą║ąŠč鹊čĆčŗčģ čüą╗čāčćą░čÅčģ. ąĀą░ąĘą▓ąŠčĆąŠčé ą▓ čéčāą┐ąĖą║ąĄ čĆąŠą▒ąŠčé ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą║ą░ą║ ą┐ąŠą▓ąŠčĆąŠčé. ąó.ąĄ. ą▓čĆą░čēą░ąĄčéčüčÅ ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ čüąĄąĮčüąŠčĆ ąĮąĄ čāą▓ąĖą┤ąĖčé ą╗ąĖąĮąĖčÄ. ąÆ čéčāą┐ąĖą║ąĄ ą┐ąŠąĮčÅčéąĮąŠ - ąĄą┤ąĖąĮčüčéą▓ąĄąĮąĮą░čÅ ą╗ąĖąĮąĖčÅ ą║ąŠč鹊čĆčāčÄ ą╝ąŠąČąĮąŠ čāą▓ąĖą┤ąĄčéčī - čŹč鹊 ą╗ąĖąĮąĖčÅ ąĮą░ąĘą░ą┤ ąĖ ą▒čāą┤ąĄčé ąŠąĘąĮą░čćą░čéčī, čćč鹊 čĆą░ąĘą▓ąŠčĆąŠčé ąĘą░ą▓ąĄčĆčłąĄąĮ. ąØąŠ ąĮą░ ą┐ąĄčĆąĄą║čĆčæčüčéą║ąĄ - čŹč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗ąĖąĮąĖčÅ ą▓ čüč鹊čĆąŠąĮčā ąĖą╗ąĖ ą▓čüčæ ąČąĄ ą╗ąĖąĮąĖčÅ ąĮą░ąĘą░ą┤, ąĄčüą╗ąĖ ą┐ąĄčĆąĄą║čĆčæčüč鹊ą║ T-ąŠą▒čĆą░ąĘąĮčŗą╣ ąĖ ą║čĆčāčéąĖą╝čüčÅ ą▓ ąĮčāąČąĮčāčÄ čüč鹊čĆąŠąĮčā. ąóą░ą║ ą▓ąŠčé čćč鹊 ą┤ąĄą╗ą░čéčī - ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą┤ą╗čÅ čĆą░ąĘą▓ąŠčĆąŠčéą░ ąŠą┤ąĖąĮ ąĖą╗ąĖ ą┤ą▓ą░ ą┐ąŠą▓ąŠčĆąŠčéą░ (ąĮąŠ č鹊ą│ą┤ą░ ąĮą░ą┤ąŠ ą▓ čäčāąĮą║čåąĖčÄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐ąŠą▓ąŠčĆąŠčéą░ ąĄčēąĄ ąĖ ą┐ąĄčĆąĄą┤ą░čéčī ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą┐ąĄčĆąĄą║čĆčæčüčéą║ą░) ąĖą╗ąĖ ą▓ąŠčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čéą░čģąŠą┤ą░čéčćąĖą║ąŠą╝ - ą▓ąĄą┤čī čĆą░čüčüč鹊čÅąĮąĖąĄ ą╝ąĄąČą┤čā ą║ąŠą╗čæčü ąĖąĘą▓ąĄčüčéąĮąŠ. ą¤ąŠą║ą░ čüč鹊čÄ ą┐ąĄčĆąĄą┤ ą▓čŗą▒ąŠčĆąŠą╝, čćč鹊 ą╗čāčćčłąĄ. ąóčāčé ąĄčüčéčī ąĄčēąĄ ą╝ąŠą╝ąĄąĮčé. ąĢčüą╗ąĖ čĆąŠą▒ąŠčé čłąĄą╗ ą▓ą┐ąĄčĆąĄą┤ ąĖ čéčāčé ąĄą╝čā ą┤ą░čæčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąŠą▓ąĄčĆąĮčāčéčī - čåąĄąĮčéčĆ ąŠčüąĄą╣ ąĮąĄ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąĮą░ ą╝ąĄčüč鹥 - ąŠąĮ čüą╝ąĄčēą░ąĄčéčüčÅ ąĮą░ ąĮąĄą▒ąŠą╗čīčłčāčÄ ą▓ąĄą╗ąĖčćąĖąĮčā. ą» čŹč鹊 ąĮą░ą▒ą╗čÄą┤ą░čÄ ą┐ąŠ ą┐čĆąŠčåąĄą┤čāčĆąĄ č鹥čüčéą░ ą╝ąŠč鹊čĆąŠą▓. ąÆ čĆąŠą▒ąŠčéą░čģ čÅ ą▓čüčéą░ą▓ą╗čÅčÄ čŹč鹊čé č鹥čüčé čćč鹊ą▒čŗ ą┐čĆąŠą▓ąĄčĆąĖčéčī ą┐čĆą░ą▓ąĖą╗čīąĮąŠčüčéčī ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣. ąŚą░ą┐čāčüą║ą░čÅ č鹥čüčé čĆąŠą▒ąŠčé ą┤ąŠą╗ąČąĄąĮ ą▓čŗą┐ąŠą╗ąĮąĖčéčī "čéą░ąĮąĄčå": ą▓ą┐čĆą░ą▓ąŠ, ą▓ą╗ąĄą▓ąŠ, ą▓ą┐ąĄčĆąĄą┤, ąĮą░ąĘą░ą┤ ąĖ ą┐ą░čāąĘą░. ąĢčüą╗ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ąĖąĮą░čÅ - ą│ą┤ąĄ-č鹊 ąĮą░ą┐čāčéą░ąĮą░ ą┐ąŠą╗čÅčĆąĮąŠčüčéčī, čā ąŠą┤ąĮąŠą│ąŠ ąĖą╗ąĖ ąŠą▒ąŠąĖčģ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣. ąś ąĮąĄčüą╝ąŠčéčĆčÅ ąĮą░ č鹊 čćč鹊 ą▓čüąĄ ą┤ą▓ąĖąČąĄąĮąĖčÅ ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠąĄ ą▓čĆąĄą╝čÅ - čĆąŠą▒ąŠčé čüą╝ąĄčēą░ąĄčéčüčÅ ą▓ą╗ąĄą▓ąŠ. ąŁč鹊 ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ą┐čĆąĖ ą┐ąĄčĆąĄčģąŠą┤ąĄ ąŠčé ą▓ą┐čĆą░ą▓ąŠ->ą▓ą┐ąĄčĆąĄą┤ ą┐čĆą░ą▓ąŠą╝čā ą║ąŠą╗ąĄčüčā ąĮąĄ ąĮą░ą┤ąŠ ą╝ąĄąĮčÅčéčī ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čĆą░čēąĄąĮąĖčÅ ąĖ, čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ, ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčīčüčÅ. ąÆąŠčé ąĖąĘ-ąĘą░ čŹč鹊ą│ąŠ čüą╝ąĄčēąĄąĮąĖčÅ, ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčéą║ą╗ąŠąĮąĄąĮąĖąĄ ą╝ąĄąČą┤čā ąŠąČąĖą┤ą░ąĄą╝čŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ čü čéą░čģąŠą┤ą░čéčćąĖą║ą░ ąĖ č鹥ą╝ čćč鹊 čĆąĄą░ą╗čīąĮąŠ ą▒čāą┤ąĄčé. ąÆąŠčé č鹊ą╗čīą║ąŠ ąĮą░čüą║ąŠą╗čīą║ąŠ čŹč鹊 ąŠčéą║ą╗ąŠąĮąĄąĮąĖąĄ ą▒čāą┤ąĄčé ą▒ąŠą╗čīčłąĖą╝, ą╝ąŠąČąĄčé ąŠąĮąŠ ą▒čāą┤ąĄčé ą│ąŠčĆą░ąĘą┤ąŠ ą╝ąĄąĮčīčłąĄ ą▓ąĄą╗ąĖčćąĖąĮčŗ č湥čéą▓ąĄčĆčéąĖ ąŠą║čĆčāąČąĮąŠčüčéąĖ ąĖ ąĮąĄ ą▒čāą┤ąĄčé čüąĖą╗čīąĮąŠ ą▓ą╗ąĖčÅčéčī ąĮą░ čĆą░ąĘą╗ąĖčćąĖąĄ ą╝ąĄąČą┤čā č湥čéą▓ąĄčĆčéčīčÄ ąĖ ą┐ąŠą╗ąŠą▓ąĖąĮąŠą╣ ą┤čāą│ąĖ ąŠą║čĆčāąČąĮąŠčüčéąĖ - čŹč鹊 ąĮą░ą┤ąŠ ąĄčēąĄ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčī. Ser60 ą┐ąĖčüą░ą╗(ą░): ą£ąŠąČąĄčé čüąĄąĮčüąŠčĆ ąĮą░ ą║ą╗ąĄą╣ ą┐ąŠčüą░ą┤ąĖčéčī, čćč鹊ą▒čŗ ą▓ čĆą░ąĘčŖčæą╝ąĄ ąĮąĄ ą▒ąŠą╗čéą░ą╗čüčÅ ą×ą╣, ąĮąĄ ą╗čÄą▒ą╗čÄ čÅ ąĮąĄčĆą░ąĘčŖčæą╝ąĮčŗąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ. ą» čüą║ąŠčĆąĄąĄ, č鹊ą│ą┤ą░ ąĮą░ 3D ą┐čĆąĖąĮč鹥čĆąĄ ą║ą░ą║čāčÄ ąĘą░čēąĄą╗ą║čā ąĄą╝čā ąĮą░ą┐ąĄčćą░čéą░čÄ. ąś ą║čüčéą░čéąĖ, čā čŹč鹊ą│ąŠ čüąĄąĮčüąŠčĆą░ čüąŠą▓čüąĄą╝ ąĮąĄčé ąĮąĖą║ą░ą║ąĖčģ ą║čĆąĄą┐čæąČąĮčŗčģ ąŠčéą▓ąĄčĆčüčéąĖą╣. ą» ą▓čüčæ ąĄčēąĄ ą┤čāą╝ą░čÄ ą║ą░ą║ ąĄą│ąŠ ą┐ąŠą┤ą▓ąĖąĮčāčéčī ą▓ą┐ąĄčĆąĄą┤, čćč鹊ą▒čŗ čüąĄąĮčüąŠčĆ ą▓ąĖą┤ąĄą╗ ąĮą░ ą┐ąĄčĆąĄą║čĆčæčüčéą║ą░čģ ą╗ąĖąĮąĖčÄ ą┐čĆąĖ ąĮąĄą▒ąŠą╗čīčłąĖčģ ą▓čŗą▒ąĄą│ą░čģ. ą¤ąŠč鹊ą╝čā ą║ą░ą║ ąĮą░ą┤ąŠ, čćč鹊ą▒čŗ ą┤ą░ąČąĄ ąĄčüą╗ąĖ ąŠčüčī ą▓čĆą░čēąĄąĮąĖčÅ ąĮąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ č鹊čćąĮąŠ ąĮą░ą┤ ą┐ąĄčĆąĄą║čĆčæčüčéą║ąŠą╝ čüąĄąĮčüąŠčĆ ą▓čüčæ ąČąĄ ą╝ąŠą│ "ąĘą░čåąĄą┐ąĖčéčī" ą▓čüąĄ ąĮčāąČąĮčŗąĄ ą▓ąĄčéą▓ąĖ, čćč鹊ą▒čŗ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ čü ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░čéčīčüčÅ. ąĪ ą┤čĆčāą│ąŠą╣ čüč鹊čĆąŠąĮčŗ, ą┤ą╗čÅ čŹč鹊ą│ąŠ čłą░čüčüąĖ čÅ ą┐čĆąĖą║čāą┐ąĖą╗ ąĄčēąĄ ąĖ ą┐ąĄčĆąĄą┤ąĮąĖą╣ ąŠą┐ąŠčĆąĮčŗą╣ čłą░čĆąĖą║, čćč鹊ą▒čŗ čĆąŠą▒ąŠčé ąĮąŠčüąŠą╝ ąĮąĄ ą║ą╗ąĄą▓ą░ą╗.  ąÆąŠčé čéą░ą║ ą▓čŗą│ą╗čÅą┤ąĖčé ą┐ąŠą║ą░ čĆąŠą▒ąŠčé čüąĮąĖąĘčā (ąĮą░ č乊ąĮąĄ ą╝ąŠąĄą│ąŠ č鹥čüč鹊ą▓ąŠą│ąŠ ą╝ąĮąŠą│ąŠčüą▓čÅąĘąĮąŠą│ąŠ ą╗ą░ą▒ąĖčĆąĖąĮčéą░). ąś čŹč鹊čé čüą░ą╝čŗą╣ čłą░čĆąĖą║ ą╝ąĮąĄ ąĖ ąĮąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąĄčĆąĄą┤ą▓ąĖąĮčāčéčī čüąĄąĮčüąŠčĆ ąĮąĄą╝ąĮąŠą│ąŠ ą▓ą┐ąĄčĆąĄą┤. ąŁčéčā ą║ąĮąĖąČą║čā ąö菹▓ąĖčüą░ čÅ č鹊ąČąĄ ąĮąĄą┤ą░ą▓ąĮąŠ ą╗ąĖčüčéą░ą╗. ąĖčüą║ą░ą╗ ąŠčéą▓ąĄčé ąĮą░ ą▓ąŠą┐čĆąŠčü ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé čéą░ą╣ą╝ąĄčĆą░ čĆą░ą▒ąŠčéą░čÄčēąĄą│ąŠ ą▓ čĆąĄąČąĖą╝ąĄ up-down. ą¤čĆąŠčüč鹊 ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╗, čćč鹊 čéą░ą╣ą╝ąĄčĆ čā 432 ąĮąĄ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé 430. ąÆą░ą╗ą▓ą░ąĮąŠ ą┐čĆąĄą┤ą╗ą░ą│ą░ąĄčé "ą┐ąŠčŹą║čüą┐ąĄčĆąĖą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčī" čü ą┐ąĄčĆąĖąŠą┤ąĖčćąĮąŠčüčéčīčÄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąŠčåąĄą┤čāčĆčŗ čüčćąĖčéą░čÄčēąĄą╣ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄąĄ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖąĄ. ąÉ čÅ ą┤čāą╝ą░čÄ, čćč鹊 čéą░ą╝ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčī, ąĮą░ą┤ąŠ ą┤ąĄą╗ą░čéčī čü čćą░čüč鹊č鹊ą╣ PWM čüąĖą│ąĮą░ą╗ą░ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣, čćč鹊ą▒čŗ ą▓čŗčćąĖčüą╗ąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĘą░ą│čĆčāąĘąĖčéčī ą▓ čéą░ą╣ą╝ąĄčĆ ąĖ ąŠąĮąŠ čüčĆą░ąĘčā ąĮą░čćą░ą╗ąŠ ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ - čćą░čēąĄ ąĮąĄčé čüą╝čŗčüą╗ą░, ą░ čĆąĄąČąĄ - čāčģčāą┤čłąĖčéčüčÅ ą▓čĆąĄą╝čÅ čĆąĄą░ą║čåąĖąĖ.
_________________
ąÉ ą╗čÄą┤ąĖ ą┐ąŠčüą╝ąŠčéčĆčÅčé ąĖ čüą║ą░ąČčāčé: "ąĪąŠą▒ą░ą║ąĖ ą╗ąĄčéčÅčé. ąÆąŠčé ąĖ ąŠčüąĄąĮčī."
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
uldemir
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ąŠą║čé 20, 2019 16:51:57 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214
ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
ą¤ąŠčćąĖčéą░ą╗ ąĄčēąĄ ą║ąĮąĖąČą║čā. ąźąŠčéčī ą│ą╗ą░ą▓ą░ ą┐čĆąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ąŠčćčéąĖ ąĮąĖč湥ą│ąŠ ąĮąŠą▓ąŠą│ąŠ ąĮąĄ ąŠčéą║čĆčŗą╗ą░, ąĮąŠ ąŠčéą▓ąĄčéąĖą╗ą░ ąĮą░ ą▓ąŠą┐čĆąŠčü ą┐čĆąŠ PortMapper. ąÜąŠą│ą┤ą░ čÅ čćąĖčéą░ą╗ Reference Manual ąĮąĄ ąĮą░čłąĄą╗ ąŠčéą▓ąĄčéą░ ąĮą░ ą▓ąŠą┐čĆąŠčü, čćč鹊 ą▒čāą┤ąĄčé, ąĄčüą╗ąĖ ąŠą┤ąĖąĮ čĆąĄčüčāčĆčü ąĮą░ąĘąĮą░čćąĖčéčī ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▓čŗą▓ąŠą┤ąŠą▓. ą×ą║ą░ąĘą░ą╗ąŠčüčī, ą▒čāą┤ąĄčé č鹊 čćč鹊 ąĖ ą┤ąŠą╗ąČąĮąŠ - ą▓čŗčģąŠą┤ ą▒čāą┤ąĄčé ą┐ąŠą▓č鹊čĆčÅčéčīčüčÅ, ą░ ą▓ąŠčé ą▓čģąŠą┤čŗ ą▒čāą┤čāčé ąŠą▒čŖąĄą┤ąĖąĮąĄąĮčŗ ą┐ąŠ ąśąøąś. ą¦čāčéčī-čćčāčéčī čģąĖčģąĖą║ąĮčāą╗ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ ą┐čĆąŠ ą┐ąĖčéą░ąĮąĖąĄ, ą│ą┤ąĄ ąĮąĖą║ąĄą╗čī-ą║ą░ą┤ą╝ąĖąĄą▓čŗąĄ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ąĮą░ąĘą▓ą░ą╗ąĖ NiCad. ąÉ ą╝ąĮąĄ čāčćąĖč鹥ą╗čīąĮąĖčåą░ ą┐ąŠ čģąĖą╝ąĖąĖ ą│ąŠą▓ąŠčĆąĖą╗ą░, čćč鹊 čéą░ą▒ą╗ąĖčåą░ ą£ąĄąĮą┤ąĄą╗ąĄąĄą▓ą░ ą▓ąĄąĘą┤ąĄ ąŠą┤ąĖąĮą░ą║ąŠą▓ą░. ąØą░ ą▓čŗčģąŠą┤ąĮčŗčģ čĆąĄčłąĖą╗, čćč鹊 ąĮą░ą┤ąŠ ą▒čŗ ąĘą░ąĮčÅčéčīčüčÅ ą┐ąĄčĆąĄąĮąŠčüąŠą╝ ą║ąŠą┤ą░ ąĮą░ RSLK-MAX. ąĪą┤ąĄą╗ą░ą╗ ą▓ ąÜąĄą╣ą╗ąĄ ą▓č鹊čĆąŠą╣ čéą░čĆą│ąĄčé, ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗ ą┤ąĄčäą░ą╣ąĮ ąĖ ą┐ąŠčłąĄą╗ ą┐ąŠ č鹥ą║čüčéčā ą┐čĆą░ą▓ąĖčéčī. ą¤ąŠč鹊ą╝ ąĮą░ą▓ąĄčüąĖą╗ ąĮą░ ą┐čĆąŠą▓ąŠą┤ą║ą░čģ ą┤ąĖčüą┐ą╗ąĄą╣, ą▓ą║ą╗čÄčćąĖą╗ ąĖ ą┤ą░ąČąĄ ąĮą░ ą┤ąĖčüą┐ą╗ąĄąĄ ą║ą░čĆčéąĖąĮą║ą░ ą┐ąŠčÅą▓ąĖą╗ą░čüčī. ąØąŠ čĆąĄą░ą║čåąĖąĖ ąĮą░ ą║ąĮąŠą┐ą║ąĖ ąĮąĄ ą▒čŗą╗ąŠ. ąÜąĮąŠą┐ą║ąĖ čÅ ąĮąĄ ą┐čĆąĖą┤ąĄą╗ą░ą╗ ąĄčēąĄ, ąĮąŠ ą▓ ą║ąŠą┤ąĄ čā ą╝ąĄąĮčÅ ą║ąĮąŠą┐ą║ąĖ ąĮą░ ą╗ą░ąĮčćą┐ą░ą┤ąĄ č鹊ąČąĄ čüčćąĖčéčŗą▓ą░ą╗ąĖčüčī ąĖ ą║ąŠąĄ ą│ą┤ąĄ ąŠąĮąĖ ą┐ąŠą▓č鹊čĆčÅą╗ąĖ ąŠčüąĮąŠą▓ąĮčŗąĄ ą║ąĮąŠą┐ą║ąĖ. ąØą░čćą░ą╗ ąĖąĘčāčćą░čéčī, ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ, čćč鹊 ąĮąŠą▓čŗąĄ ą┐ąŠčĆčéčŗ ą┤ą╗čÅ ą║ąĮąŠą┐ąŠą║ ą║ąŠąĮčäą╗ąĖą║čéčāčÄčé čü čüąĖą│ąĮą░ą╗ą░ą╝ąĖ ą▓čŗą▒ąŠčĆą░ čåą▓ąĄčéą░ ą┤ą╗čÅ čåą▓ąĄč鹊ą▓ąŠą│ąŠ čüąĄąĮčüąŠčĆą░. ąØčā, čćč鹊 ąČ. ąŚąĮą░čćąĖčé ą┐čĆąĖčłą╗ąŠ ą▓čĆąĄą╝čÅ ą┐čĆąĖą║čĆčāčćąĖą▓ą░čéčī ą┤čĆčāą│ąŠą╣ ą┤ą░čéčćąĖą║ čåą▓ąĄčéą░. ąĢčēąĄ ą▓ąĄčüąĮąŠą╣ čÅ ąĘą░ą║ą░ąĘą░ą╗ ąĮą░ ebay ą╝ąŠą┤čāą╗čī ąĮą░ TCS34725 - ą┤ą░čéčćąĖą║ čåą▓ąĄčéą░ čü i2c ąĖąĮč鹥čĆč乥ą╣čüąŠą╝. ąŁč鹊 čÅ ą┤ą╗čÅ ąĮąĄą│ąŠ č鹊ą│ą┤ą░ čüčéčĆąŠąĖą╗ ą┤čĆą░ą╣ą▓ąĄčĆ. ą¤ąŠą┤ą┤ąĄčƹȹ║čā čŹč鹊ą│ąŠ čüąĄąĮčüąŠčĆą░ ą▒čŗą╗ čāąČąĄ ą┤ą░ą▓ąĮąŠ ąĮą░ą┐ąĖčüą░ą▓čłąĖ, ąĮąŠ ą┤ąŠ čüąĖčģ ą┐ąŠčĆ ąĮąĄ ąĘą░ą┐čāčüą║ą░ą╗ ąĄą│ąŠ ąĖ ąĮąĄ ąŠčéą╗ą░ąČąĖą▓ą░ą╗. ąØčā čŹč鹊 čćčāčéčī ą┐ąŠąĘąČąĄ - čüą░ą╝ąŠąĄ ąĖąĮč鹥čĆąĄčüąĮąŠąĄ ą║ą░ą║ čĆą░ą▒ąŠčéą░ąĄčé čüąĄąĮčüąŠčĆ ą╗ąĖąĮąĖąĖ. ąÜąĮąŠą┐ą║ąĖ ąŠąČąĖą╗ąĖ, čüč鹊ąĖą╗ąŠ ąŠčéą║ą╗čÄčćąĖčéčī čüčéą░čĆčŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ą┤ą░čéčćąĖą║ą░ čåą▓ąĄčéą░, ą▓čŗą▒čĆą░ą╗ č鹥čüčé čüąĄąĮčüąŠčĆą░ ą╗ąĖąĮąĖąĖ ąĖ... ą▓čüčæ č湥čĆąĮąŠąĄ. ąÉą│ą░, ą┐ąŠą╗ąĄąĘ ą║ą░ą╝ąĄčĆąŠą╣ čüąĮąŠą▓ą░ čüą╝ąŠčéčĆąĄčéčī ąĮą░ čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ - ąĮąĄ čüą▓ąĄčéčÅčé. ąÉčģ... čŹč鹊ą╝čā čĆąŠą▒ąŠčéčā ą┤ą╗čÅ ą┐ąĖčéą░ąĮąĖčÅ čŹč鹊ą│ąŠ čüąĄąĮčüąŠčĆą░ ąĮą░ą┤ąŠ ą▓ą║ą╗čÄčćąĖčéčī ą▒ą░čéą░čĆąĄą╣ą║ąĖ. ąÆą║ą╗čÄčćąĖą╗ - ąĘą░čüą▓ąĄčéąĖą╗ąŠčüčī. ąØąŠ ą╗ąĖąĮąĖčÄ ą║ą░ą║ ąĮąĄ ą▓ąĖą┤ąĖčé - čéą░ą║ ąĮąĄ ą▓ąĖą┤ąĖčé. ą¤čĆą░ą▓ą┤ą░, ąĮą░ ą┤ąĖčüą┐ą╗ąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠčĆąŠą│ą░ ąŠč鹊ą▒čĆą░ąČą░ąĄčéčüčÅ ą║ą░ą║-č鹊 čüčéčĆą░ąĮąĮąŠ. ąØčā ą┤ą░ - čā čŹč鹊ą│ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą▓ąĄą┤čī ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĮąĄ ą┐čĆąŠą┐ąĖčüą░ąĮą░. ąÆąŠčé č鹊ą╗čīą║ąŠ ą▓ą▓ąĄčüčéąĖ čÅ ąĄčæ ąĮąĄ ą╝ąŠą│čā - ą║ąĮąŠą┐ąŠą║ č鹊 ąĮąĄčé. ąś čéčāčé ą╝ąĮąĄ ą┐čĆąĖą┤čāą╝ą░ą╗ąŠčüčī, ą░ ąĮąĄ čüą║ąŠą┐ąĖčĆąŠą▓ą░čéčī ą╗ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ čü RSLK ąĮą░ RSLK-MAX. ąÆąŠčé č鹊ą╗čīą║ąŠ ą║ą░ą║ čŹč鹊 čüą┤ąĄą╗ą░čéčī? ąÆ ąÜąĄą╣ą╗ąĄ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░ą╗ ąĘą░ą╣čéąĖ ą▓ debug, ąŠčéą║čĆčŗą╗ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ą░ą╝čÅčéąĖ ą┐ąŠ ą░ą┤čĆąĄčüčā 0x3f000 - ąŠ, ą▓ąĖąČčā ąĘąĮą░ą║ąŠą╝čŗąĄ čåąĖčäąĖčĆčīą║ąĖ. ąØąŠ, ąĮąĖ čüą║ąŠą┐ąĖčĆąŠą▓ą░čéčī, ąĮąĖ čüąŠčģčĆą░ąĮąĖčéčī ąĮąĖą│ą┤ąĄ ąĮąĄ ą╝ąŠą│čā. ąÆ ą║ąŠąĮčåąĄ-ą║ąŠąĮčåąŠą▓ čÅ ąĮąĄ ą│ąŠčĆą┤čŗą╣, čüą┤ąĄą╗ą░ą╗ čüą║čĆąĖąĮčłąŠčé - ą▓ą▓ąĄą┤čā čĆčāčćą║ą░ą╝ąĖ. ą¤ąŠą┤ą║ą╗čÄčćą░čÄčüčī ą║ RSLK-MAX ąĘą░čģąŠąČčā ą▓ ą┤ąĄą▒ą░ą│, ąŠčéą║čĆčŗą▓ą░čÄ ą┐ą░ą╝čÅčéčī, ą┐čĆąŠą▒čāčÄ ą▓ą▓ąĄčüčéąĖ čŹčéąĖ čåąĖčäčĆčŗ - ąĮąĖč湥ą│ąŠ ąĮąĄ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ. ą×ą┤ąĮą░ą║ąŠ, čäą╗čŹčł čŹč鹊 ąĮąĄ ą×ąŚąŻ. ąźą╝ą╝ą╝, čćč鹊 ąČąĄ ą┤ąĄą╗ą░čéčī? ą¤ąŠčłąĄą╗ ą│čāą│ą╗ąĖčéčī. ąØą░ą│čāą│ą╗ąĖą╗, čćč鹊 ąĄčüčéčī čéą░ą║ą░čÅ čāčéąĖą╗ąĖčéą░ ąŠčé TI - UniFlash. ąĪą║ą░čćą░ą╗, ąĖąĮčüčéą░ą╗ą╗ąĖčĆąŠą▓ą░ą╗... ąĖąĮčüčéą░ą╗ą╗ąĖčĆąŠą▓ą░ą╗ą░čüčī ą┤ąŠą▓ąŠą╗čīąĮąŠ ą┤ąŠą╗ą│ąŠ. ą×ą║, ą┐ąŠą┤ą║ą╗čÄčćą░čÄ ą║ čüčéą░čĆąŠą╝čā čĆąŠą▒ąŠčéčā, ą║ąŠąĮąĮąĄą║čé ąĄčüčéčī, ąĘą░čģąŠąČčā ą▓ čĆą░ąĘą┤ąĄą╗ ą┐ą░ą╝čÅčéąĖ ą┤ą░ą▓ą╗čÄ ą║ąĮąŠą┐ą║čā "Read Target" ąĖ ąĮą░čćąĖąĮą░ąĄčé ą║čĆčāčéąĖčéčīčüčÅ ą║ąŠą╗čæčüąĖą║ąŠ. ąś ą║čĆčāčéąĖčéčüčÅ ąĖ ą║čĆčāčéąĖčéčüčÅ, ąĖ, čĆą░ąĘčāą╝ąĄąĄčéčüčÅ, ąĮąĖč湥ą│ąŠ ąĮąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé. ąöą░ąČąĄ ąĮąĄ ą▓ąĖąČčā, čćč鹊ą▒čŗ ąĮą░ ąøą░ąĮčćą┐ą░ą┤ąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ ą┐ąŠą╝čŗčĆą│ąĖą▓ą░ą╗ąĖ. ąØčā ą┤čāą╝ą░čÄ, ąĮą░ą┤ąŠ ą┐ąŠą┤ąŠąČą┤ą░čéčī. ą¤ąŠčłąĄą╗ čüą│ąŠč鹊ą▓ąĖą╗ čāąČąĖąĮ, ą┐ąŠąĄą╗, ą▓ąĄčĆąĮčāą╗čüčÅ - nothing happen. ąØčā čéčāčé čÅ ąĮą░čćą░ą╗ ą┐ąĄčĆąĄą▒ąĖčĆą░čéčī ą▓čüčÅą║ąĖąĄ čĆą░ąĘąĮčŗąĄ ą▓ą░čĆąĖą░ąĮčéčŗ, ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ ą║ ąŠą┤ąĮąŠą╝čā čĆąŠą▒ąŠčéčā, ą║ ą┤čĆčāą│ąŠą╝čā, ąŠą▒čĆą░čéąĮąŠ ą║ ą┐ąĄčĆą▓ąŠą╝čā. ąöąŠą▓ąĄą╗ ą┤ąŠ čéą░ą║ąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ, čćč鹊 ą┐ąĄčĆąĄčüčéą░ą╗ąŠ ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ, ą░ Windows ą│ąŠą▓ąŠčĆąĖčéčī, čćč鹊 ąŠą▒ąĮą░čĆčāąČąĄąĮ unrecognised device. ąøą░ą┤ąĮąŠ, ą┐čĆąĖčłą╗ąŠčüčī ą┐ąĄčĆąĄąĘą░ą│čĆčāąČą░čéčīčüčÅ, čćč鹊 čÅ ą┤ąĄą╗ą░čÄ ą║čĆą░ą╣ąĮąĄ čĆąĄą┤ą║ąŠ. ą¤ą╗ą░čéčŗ čüčéą░ą╗ ąĮą░čģąŠą┤ąĖčéčī, ąĮąŠ ą┐ą░ą╝čÅčéčī ą║ą░ą║ ąĮąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čéą░ą║ ąĮąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé. ąŻąČąĄ ąĮąĄ ą╝ąŠą│ ą┐čĆąĖą┤čāą╝ą░čéčī, čćč鹊 ą┤ąĄą╗ą░čéčī, ą┐ąŠą║ą░ čüą╗čāčćą░ą╣ąĮąŠ ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĮąĄ ą┐čĆąĖą┤čāą╝ą░ą╗ąŠčüčī ąĮą░ąČą░čéčī ą║ąĮąŠą┐ą║čā "Perform Blank Check". ąÆąŠčé č鹊ą│ą┤ą░ ą▓čŗčüą║ąŠčćąĖą╗ąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ - čćč鹊 ą▓ą░čłąĄą╝čā ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆčā ąĮą░ą┤ąŠ ą┐čĆąŠą░ą┐ą│čĆąĄą╣ą┤ąĖčéčī ą┐čĆąŠčłąĖą▓ą║čā, čüą║ą░ąĘą░ą╗ - ą╝ąĄąĮčÅą╣ ąĖ ą▓čüčæ ąĘą░čĆą░ą▒ąŠčéą░ą╗ąŠ. ąöą░ąĮąĮčŗąĄ ą▒ą╗ą░ą│ąŠą┐ąŠą╗čāčćąĮąŠ ą┐ąĄčĆąĄą║ąŠą┐ąĖčĆąŠą▓ą░ą╗ čü ąŠą┤ąĮąŠą╣ ą┐ą╗ą░čéčŗ ąĮą░ ą┤čĆčāą│čāčÄ. ąÆąŠąŠą▒čēąĄ, čŹč鹊 ąĮąĄą╝ąĮąŠą│ąŠ ą┤ąŠčüčéą░čæčé. ąĪč鹊ąĖčé ą┐ąŠčĆą░ą▒ąŠčéą░čéčī čü CCS - ą╝ąĄąĮčÅą╣ ą┐čĆąŠčłąĖą▓ą║čā, ą¤ąĄčĆąĄčłąĄą╗ ą▓ CCS ąĮą░ ąĮąĄčéą▒čāą║ąĄ - ą╝ąĄąĮčÅą╣, ą▓ ąÜąĄą╣ą╗ - čüąĮąŠą▓ą░ ą╝ąĄąĮčÅą╣. ąóąĄą┐ąĄčĆčī ąĄčēąĄ ąĖ UniFlash. ąØčā, č鹥ą┐ąĄčĆčī čÅ ą╝ąŠą│čā ą┐ąŠčüą╝ąŠčéčĆąĄčéčī, ą║ą░ą║ čĆąŠą▒ąŠčé ą▓ąĖą┤ąĖčé ą╗ąĖąĮąĖčÄ - ą┐ą╗ąŠčģąŠ ą▓ąĖą┤ąĖčé. ą¤ąŠą┤ąĮčæčü ą╗ąĖąĮąĖčÄ čćčāčéčī ą▒ą╗ąĖąČąĄ - ąŠ čāąČąĄ ą╗čāčćčłąĄ. ą£ąŠąČąĄčé ą┐čĆąŠą▒ą╗ąĄą╝ą░ ą▓ č鹊ą╝, čćč鹊 ą┐ąŠčĆąŠą│ ąĮą░ą┤ąŠ ą┐ąŠčüčéą░ą▓ąĖčéčī ą┐ąŠą▓čŗčłąĄ, ą░ čŹč鹊 čÅ ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą▒ąĄąĘ ą║ąĮąŠą┐ąŠą║ čüąĮąŠą▓ą░ ąĮąĄ ą╝ąŠą│čā čüą┤ąĄą╗ą░čéčī. ąĪ ą┤čĆčāą│ąŠą╣ čüč鹊čĆąŠąĮčŗ čüąĄąĮčüąŠčĆ čĆą░čüčüčćąĖčéą░ąĮ ąĮą░ ą┤ąĖčüčéą░ąĮčåąĖčÄ 3ą╝ą╝, ą░ čĆąĄą░ą╗čīąĮąŠ ąŠąĮ ą▓ąĖčüąĖčé ą│ą┤ąĄ-č鹊 ąĮą░ ą▓čŗčüąŠč鹥 8ą╝ą╝. ąØčā čü čŹčéąĖą╝ ą▒čāą┤čā čĆą░ąĘą▒ąĖčĆą░čéčīčüčÅ ą┐ąŠąĘąČąĄ. ąĪąĄą╣čćą░čü ąĮą░ą┤ąŠ ą▒čŗ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī, čćč鹊 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüąĄąĮčüąŠčĆ čåą▓ąĄčéą░. ąÉ ąĮąĖč湥ą│ąŠ ąĮąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé. ąōą╗čāčģąŠ ą║ą░ą║ ą▓ čéą░ąĮą║ąĄ. ą×čéą╗ąŠąČąĖą╗ čŹč鹊 ą┤ąĄą╗ąŠ ą┤ąŠ čāčéčĆą░. ąŻčéčĆąŠą╝ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░ą╗ ą▓ ą┐čĆąŠčåąĄą┤čāčĆčā ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą▓čüčéą░ą▓ąĖčéčī ąĘą░ą┐čĆąŠčü ąĮą░ ID čāčüčéčĆąŠą╣čüčéą▓ą░. ąØąĖč湥ą│ąŠ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé. ą×ą║ą░ąĘą░ą╗ąŠčüčī, ą┐čĆąŠą▒ą╗ąĄą╝ą░ ą▓ ą░ą┤čĆąĄčüąĄ. ąØąĄą║ąŠč鹊čĆčŗąĄ ą░ą┤čĆąĄčüą░ čāą║ą░ąĘčŗą▓ą░čÄčé čüąĄą╝ąĖ ą▒ąĖčéąĮčŗąĄ, ąĮąĄą║ąŠč鹊čĆčŗąĄ ą▓ąŠčüčīą╝ąĖ ą▒ąĖčéąĮčŗąĄ. ą£ąĮąĄ ąĮčāąČąĮąŠ - ą▓ąŠčüčīą╝ąĖ ą▒ąĖčéąĮčŗą╣. ąĪą┤ą▓ąĖąĮčāą╗ ąĮą░ ą▒ąĖčé ą▓ą╗ąĄą▓ąŠ - ąĘą░ą▓ąĄą╗ąŠčüčī. ąÆčüčæ čĆą░ą▓ąĮąŠ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé č湥čĆąĮąŠčéčā. ąŻąČąĄ ą┤čāą╝ą░ą╗ ąĮą░ą╣čéąĖ ą║ą░ą║ąŠą╣ čüą║ąĄčéčć ą▓ čüąĄčéąĖ ąĖ ą┐ąŠą┤čåąĄą┐ąĖčéčī ą║ ą░čĆą┤čāąĖąĮąĄ, čćč鹊ą▒čŗ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ą║ą░ą║ąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĮą░čĆąŠą┤ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé. ąØąŠ ąĮą░ GitHub ąĮą░čłąĄą╗ ąŠą┤ąĮčā ą▒ąĖą▒ą╗ąĖąŠč鹥čćą║čā, ą│ą┤ąĄ ą▒čŗą╗ ą┐čĆąĖą╝ąĄčĆ ąĖ ą▓ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čÅą▓ąĮąŠ ą▒čŗą╗ąŠ ą▓ąĖą┤ąĮąŠ ą▓čĆąĄą╝čÅ 33ą╝čü, čāčüąĖą╗ąĄąĮąĖąĄ 1. ąÆčŗčüčéą░ą▓ąĖą╗ čÅ čŹčéąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ - čćč鹊-č鹊 ą┐ąŠą║ą░ąĘą░ą╗ąŠ, ąĮąŠ ą┐ąŠą▓ąĖčüą╗ąŠ. ą¤čŗčéą░čÄ ą┐ąŠą┤ ąŠčéą╗ą░ą┤čćąĖą║ąŠą╝ - ąĖą┤čæčé. ą×čéą┐čāčüą║ą░čÄ - ąĘą░ą▓ąĖčüą░ąĄčé ą▓ ą┤čĆą░ą╣ą▓ąĄčĆąĄ i2c. ą×ą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ, čÅ ą▓ ą┤čĆą░ą╣ą▓ąĄčĆąĄ čüą┤ąĄą╗ą░ą╗ ą┐ą╗čÄčģčā. ąÆąŠčé ą║ąŠą│ą┤ą░ čÅ ą▒ąŠčĆąŠą╗čüčÅ čü ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ čüąĖą│ąĮą░ą╗ą░ ąĪąóą×ą¤ ą┐čĆąĖ čćč鹥ąĮąĖąĖ. ąØą░ą┐ąĖčüą░ą╗ čéą░ą║ąŠą╣ ą║čāčüąŠą║: ąÜąŠą┤: while (i2c_state != i2c_idle) {
if (i2c_state == rcv_stop) {
while (I2C_DEV->CTLW0 & UCTXSTT) continue;
I2C_DEV->CTLW0 |= UCTXSTP;
i2c_state = i2c_stop;
}
} ąó.ąĄ. ą║ąŠą│ą┤ą░ ą┐čĆąĖčģąŠą┤ąĖčé čüąŠčüč鹊čÅąĮąĖąĄ ąŠčüčéą░ąĮąŠą▓ąĖčéčī ą┐čĆąĖčæą╝ čÅ ą▓čŗčüčéą░ą▓ą╗čÅčÄ ą▒ąĖčé ą┐ąĄčĆąĄą┤ą░čćąĖ čüč鹊ą┐ ąĖ ą┐ąĄčĆąĄčģąŠąČčā ą▓ čüąŠčüč鹊čÅąĮąĖąĄ i2c_stop ąĖ ąČą┤čā ą║ąŠą│ą┤ą░ ą┐čĆąĖą┤čæčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé čŹč鹊ą│ąŠ čüč鹊ą┐ą░ ąĖ ą┐ąĄčĆąĄą▓ąĄą┤čæčé čüčéą░čéčāčü ą▓ i2c_idle. ą×ą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 ą▓čŗčüčéą░ą▓ąĖą▓ ą▒ąĖčé UCTXSTP ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čéą░ą║ ą▒čŗčüčéčĆąŠ, čćč鹊 čüą╗ąĄą┤čāčÄčēą░čÅ čüčéčĆąŠčćą║ą░ ąĮąĄ čāčüą┐ąĄą▓ą░ąĄčé ą▓čŗą┐ąŠą╗ąĮąĖčéčīčüčÅ, ą║ą░ą║ čüčéą░čéčāčü ą╝ąĄąĮčÅąĄčéčüčÅ ąĮą░ i2c_idle, ą░ ą┐ąŠč鹊ą╝ čÅ čāąČąĄ ąĄą│ąŠ ą╝ąĄąĮčÅčÄ ąĮą░ i2c_stop ąĖ... ąŠą║ą░ąĘčŗą▓ą░čÄčüčī ą▓ ą▓ąĄčćąĮąŠą╝ čåąĖą║ą╗ąĄ. ą×ą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ, ąĮą░ą┤ąŠ ą▒čŗą╗ąŠ čŹčéąĖ ą┤ą▓ąĄ čüčéčĆąŠčćą║ąĖ ą┐ąŠą╝ąĄąĮčÅčéčī ą╝ąĄčüčéą░ą╝ąĖ: čüąĮą░čćą░ą╗ą░ i2c_state = i2c_stop; ą░ ąĘą░č鹥ą╝ č鹊ą╗čīą║ąŠ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī I2C_DEV->CTLW0 |= UCTXSTP; - ąÜą╗ą░čüčüąĖč湥čüą║ą░čÅ ą┐ą╗čÄčģą░. ąźąŠčéčÅ, čüąĮąŠą▓ą░ ą┐ąŠą┤čāą╝ą░ą╗, ą▓ąĄą┤čī ą┤ąĖčüą┐ą╗ąĄą╣ ą┐ąŠ i2c čÅ čéčāčé ą┐ąŠą┤ą║ą╗čÄčćą░čéčī ąĮąĄ čüąŠą▒ąĖčĆą░čÄčüčī - ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą▒čŗ čüą┤ąĄą╗ą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆ ąĖ čü "ą░ą▓č鹊čüč鹊ą┐ąŠą╝" - ą▒čŗą╗ąŠ ą▒čŗ ą┐čĆąŠčēąĄ ąĖ čüčéą░ą▒ąĖą╗čīąĮąĄąĄ. ąĪąĄąĮčüąŠčĆ čåą▓ąĄčéą░ ą╝ą░ą║čüąĖą╝čāą╝ čüčćąĖčéčŗą▓ą░ąĄčé 8 ą▒ą░ą╣čé ą┐ąŠ ą┤ą▓ą░ ą▒ą░ą╣čéą░ ąĮą░ ą║ą░ąĮą░ą╗: Clear, Red, Green, Blue. ąóąĄą┐ąĄčĆčī čüąĄąĮčüąŠčĆ čåą▓ąĄčéą░ čĆą░ą▒ąŠčéą░ąĄčé ąĖ ą┤ą░ąČąĄ čĆą░ąĘą╗ąĖčćą░ąĄčé čåą▓ąĄčéą░. ąś čüą║ą░ąČčā, ą┤ą░ąČąĄ ą╗čāčćčłąĄ č湥ą╝ TCS3200. ą¤čĆą░ą▓ą┤ą░, ąĮą░ą┤ąŠ ą▒čŗ ąĄčēąĄ ą┐ąŠčĆąŠą│ąĖ ąĮą░čüčéčĆąŠąĖčéčī, but I can't do it alone ąĮąŠ čÅ ąĮąĄ ą╝ąŠą│čā čŹč鹊 čüą┤ąĄą╗ą░čéčī ą▒ąĄąĘ ą║ąĮąŠą┐ąŠą║. ąöą░ ąĖ č鹥čüčé čü ąĮą░čüčéčĆąŠą╣ą║ąŠą╣ ąĮą░ą┤ąŠ ą▒čŗ ąŠč乊čĆą╝ąĖčéčī ą┐ąŠą╗čāčćčłąĄ, ą░ č鹊 ą┐ąŠą║ą░ čÅ ąĖčüą┐ąŠą╗čīąĘčāčÄ čüčéą░čĆčŗą╣ č鹥čüčé čüąĄąĮčüąŠčĆą░ ą╗ąĖąĮąĖąĖ, ą┐čĆąŠčüč鹊 ą┐ąŠą┤čüčéą░ą▓ą╗čÅčÄ ą┤čĆčāą│ąĖąĄ ą┤ą░ąĮąĮčŗąĄ. ąØčā č鹥ą┐ąĄčĆčī ąĄčēąĄ čüč鹊ąĖčé ąĘą░ą┤ą░čćą░ čĆą░ąĘą╝ąĄčüčéąĖčéčī čŹč鹊čé ą┤ą░čéčćąĖą║ ąĮą░ ą┤ąĮąĖčēąĄ čĆąŠą▒ąŠčéą░ ąĖ ą┐čĆąŠčéčÅąĮčāčéčī ą┐čĆąŠą▓ąŠą┤ą░ ą║ ą┐ą╗ą░č鹥. ąś ąŠą┐čÅčéčī, ą║ą░ą║ čÅ čāą▒ąĄą┤ąĖą╗čüčÅ, čłą░ą│ ąŠčéą▓ąĄčĆčüčéąĖą╣ ą▓ čłą░čüčüąĖ Romi ąĮąĖą║ą░ą║ ąĮąĄ čüąŠą▓ą┐ą░ą┤ą░ąĄčé čü čĆą░čüčüč鹊čÅąĮąĖąĄą╝ ąŠčéą▓ąĄčĆčüčéąĖą╣ ąĮą░ ą┐ą╗ą░čéą║ąĄ čŹč鹊ą│ąŠ čüąĄąĮčüąŠčĆą░. ąĪ ą┤čĆčāą│ąŠą╣ čüč鹊čĆąŠąĮčŗ, čÅ čéčāčé ą┐ąŠą┤čāą╝ą░ą╗, čćč鹊 čŹč鹊čé čüąĄąĮčüąŠčĆ čüąŠą▓čüąĄą╝ ąĮąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ čĆą░ąĘą╝ąĄčēą░čéčī ą┐ąŠ čåąĄąĮčéčĆčā čĆąŠą▒ąŠčéą░. ąōą╗ą░ą▓ąĮąŠąĄ, čćč鹊ą▒čŗ ą▒čŗą╗ ą▓ą┐ąĄčĆąĄą┤ąĖ čüąĄąĮčüąŠčĆą░ ą╗ąĖąĮąĖąĖ, čćč鹊ą▒čŗ ą║ąŠą│ą┤ą░ čĆąŠą▒ąŠčé ąĘą░čäąĖą║čüąĖčĆčāąĄčé ąŠčéčüčāčéčüčéą▓ąĖąĄ ą╗ąĖąĮąĖąĖ, čćč鹊ą▒čŗ čüąĄąĮčüąŠčĆ čåą▓ąĄčéą░ čāąČąĄ čüč鹊čÅą╗ ąĖą╗ąĖ ąĮą░ą┤ ą▒ąĄą╗čŗą╝ ą┐ąŠą╗ąĄą╝ čéčāą┐ąĖą║ą░, ąĖą╗ąĖ čåą▓ąĄčéąĮčŗą╝ ą┐ąŠą╗ąĄą╝ čäąĖąĮąĖčłą░. ą¤ąŠą║ą░ ąĖąĘčāčćą░ą╗ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą╝ąĄąČą┤čā RSLK ąĖ RSLK-MAX ąĮą░čłąĄą╗, čćč鹊 čÅ ąĮąĄ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą┤ąŠą│ą░ą┤ą░ą╗čüčÅ. ą×ą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą┤ą░ą╗čīąĮąŠą╝ąĄčĆąĮčŗąĄ čüąĄąĮčüąŠčĆčŗ ToF ą▒čāą┤čāčé ąĮąĄ vl6180, ą░ ąĮąĄčćč鹊 ą┐ąŠą┤ ąĮą░ąĘčŗą▓ą░ąĮąĖąĄą╝ OPT3101. ąōą╗čÅąĮčāą╗ ąĮą░ ą£ą░čāąĘąĄčĆąĄ - ą║ą░ą║ą░čÅ-č鹊 ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĘą░ 8 ąĄą▓čĆąŠ ąĖą╗ąĖ evaluation kit ąĘą░ 153!
_________________
ąÉ ą╗čÄą┤ąĖ ą┐ąŠčüą╝ąŠčéčĆčÅčé ąĖ čüą║ą░ąČčāčé: "ąĪąŠą▒ą░ą║ąĖ ą╗ąĄčéčÅčé. ąÆąŠčé ąĖ ąŠčüąĄąĮčī."
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Ser60
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ąŠą║čé 21, 2019 21:04:03 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 74
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 607
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą┤ąĄą║ 24, 2008 09:58:58
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3715
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 3
|
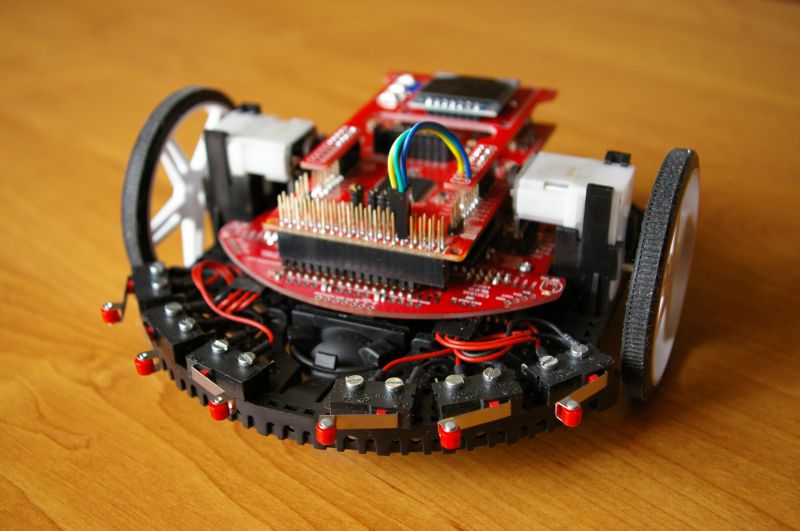
ą£ą╝ą╝ą┤ą░ą░, čü čéčĆąĄą╝čÅ ą║ąŠąĮčéčāčĆą░ą╝ąĖ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ ąÆčŗ ą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą┐čĆąĖą▒ą╗ąĖąČą░ąĄč鹥čüčī ą║ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąĖčÄ RTOS ą▓ ą┐čĆąŠąĄą║č鹥 čĆąŠą▒ąŠčéą░ (ąĄčüą╗ąĖ ąĄčēčæ ąĮąĄ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ą╗ąĖ). ąØą░ čüąĮąĖą╝ą║ąĄ ąĮąĄ ą▓ąĖą┤ąĮąŠ čćč鹊 ąĘą░ ąŠą┐ąŠčĆąĮčŗą╣ čłą░čĆąĖą║ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ. ąŁč鹊čé čłą░čĆąĖą║ ą▓čĆą░čēą░ąĄčéčüčÅ ąĖą╗ąĖ čüą║ąŠą╗čīąĘąĖčé? ąĢčüą╗ąĖ ą▓č鹊čĆąŠąĄ, čā č鹊ą╣-ąČąĄ Pololuo ąĖą╝ąĄčÄčéčüčÅ ą▓čĆą░čēą░čÄčēąĖąĄčüčÅ čłą░čĆąĖą║ąĖ (roll caster). ąÆ ą╗čÄą▒ąŠą╝ čüą╗čāčćą░ąĄ ą╝ąĮąĄ ąĮąĄčÅčüąĮąŠ ą┐ąŠč湥ą╝čā ąĮąĄą╗čīąĘčÅ ą┐ąŠą┤ą▓ąĖąĮčāčéčī čüąĄąĮčüąŠčĆ ąĄčēčæ ą▒ąŠą╗ąĄąĄ ą▓ą┐ąĄčĆčæą┤ čłą░čĆąĖą║ą░, čćč鹊ą▒čŗ ąŠąĮ ą▓čŗčüčéčāą┐ą░ą╗ ąĖąĘ-ą┐ąŠą┤ čłą░čüčüąĖ? ą£ąĄąĮčÅ č鹊ąČąĄ čüąĖą╗čīąĮąŠ ą┤ąŠčüčéą░ą▓ą░ą╗ čäą░ą║čé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą┐ąĄčĆąĄą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ J-Link ą┐ąŠą┤ ą║ą░ąČą┤ąŠąĄ IDE. ąśąĮąŠą│ą┤ą░ ąŠąĮąĖ čüčéą░ąĮąŠą▓čÅčéčüčÅ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╝ąĖ, ąĮąŠ ą┤ąŠ ą┐ąŠčĆčŗ ą┤ąŠ ą▓čĆąĄą╝ąĄąĮąĖ. ąĀąĄčłąĖą╗ čŹč鹊 ą┐ąŠą║čāą┐ą║ąŠą╣ ąĄčēčæ ąŠą┤ąĮąŠą│ąŠ J-Link ą░ą┤ą░ą┐č鹥čĆą░. ąØą░čüčćčæčé ToF čüąĄąĮčüąŠčĆą░, čģąŠčéčÅ čÅ ąĖ čäą░ąĮą░čé ąóąś, ąĮąŠ ą┤ą╗čÅ čĆąŠą▒ąŠčéą░ ą┐čĆąŠčēąĄ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čćąĖą┐ ąŠčé ST (VL61xx), čé.ą║. ą▓ ąĮčæą╝ čāąČąĄ ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮčŗ čüą▓ąĄč鹊ą┤ąĖąŠą┤ ąĖ čüą▓ąĄč鹊ą┐čĆąĖčæą╝ąĮąĖą║ ąĖ čü ąĮąĖą╝ąĖ ąŠąĮ čĆą░ą▒ąŠčéą░ąĄčé ąŠčéą╗ąĖčćąĮąŠ. ą£ąŠąČąĄčé čüč鹊ąĖčé ą▓ąĮąĄčłąĮąĖąĄ čüąĄąĮčüąŠčĆčŗ ąĮą░ ą┐ą╗ą░čéčā ą┐čĆąĖą║čĆčāčéąĖčéčī ąĖ ąĘą░ą▒čŗčéčī ąŠą▒ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗčģ ąĮą░ ąĮąĄą╣(?) ąÜčüčéą░čéąĖ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ-ą╗ąĖ ą┤ąĄč乊ą╗čéąĮąŠ ąĮą░ čłą░čüčüąĖ čĆąŠą▒ąŠčéą░ ą▓ąĮąĄčłąĮąĖąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ ąĖ čüą▓ąĄč鹊ą┐čĆąĖčæą╝ąĮąĖą║ čü čéčāą▒čāčüą░ą╝ąĖ ą║ą░ą║ ąĮą░ ą┤ąĄą╝ąŠ-ą┐ą░č鹥 OPT3101? ąØąĄ ą╝ąŠą│čā ą┤ąŠąČą┤ą░čéčīčüčÅ ąöąĮčÅ ąóąĄčģąĮąŠą╗ąŠą│ąĖąĖ ST ąĮą░ čŹč鹊ą╣ ąĮąĄą┤ąĄą╗ąĄ. ą¤čĆčÅą╝ąŠ ąĮąĄ ąĘąĮą░čÄ ąĮą░ ą║ą░ą║ąĖąĄ ą┐čĆąĄąĘąĄąĮčéą░čåąĖąĖ ąĖ hands-on čüąĄčüčüąĖąĖ ąĖą┤čéąĖ, čüą║ąŠą╗čīą║ąŠ ą▓čüąĄą│ąŠ ąĖąĮč鹥čĆąĄčüąĮąŠą│ąŠ, čģąŠčéčī čĆą░ąĘčĆčŗą▓ą░ą╣čüčÅ...
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
uldemir
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ąŠą║čé 22, 2019 05:59:40 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214
ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
|
ąØąĄ ą┤čāą╝ą░čÄ, čćč鹊 ą┤ą╗čÅ čéčĆčæčģ ą║ąŠąĮčéčāčĆąŠą▓ čāąČąĄ ąĮčāąČąĮąŠ RTOS ą│ąŠčĆąŠą┤ąĖčéčī. ą¤čĆąŠčüč鹊 ąĄčēąĄ ąŠą┤ąĖąĮ ą║ąŠąĮą║čāčĆčĆąĄąĮčéąĮčŗą╣ ą┐ąŠč鹊ą║ ą┐ąŠ ą┐čĆąĄčĆčŗą▓ą░čÄ ąŠčé PWM čéą░ą╣ą╝ąĄčĆą░. ąĀąĄą░ą╗ąĖąĘąŠą▓čŗą▓ą░čéčī ą▓ čŹč鹊ą╝ ą¤ąśąö ąĄčēąĄ ąĖ ą╝ąĄą┤ąĖą░ąĮąĮčŗą╣ čäąĖą╗čīčéčĆ ąĖą╗ąĖ čćč鹊-ą╗ąĖą▒ąŠ čéą░ą║ąŠąĄ čüą╗ąŠąČąĮąŠąĄ ą▓čĆčÅą┤ ą╗ąĖ čüč鹊ąĖčé. ąÉ čéą░ą║ - ą┐ą░čĆą░ čüą╗ąŠąČąĄąĮąĖą╣, čāą╝ąĮąŠąČąĄąĮąĖąĄ ąĖ ą┤ąĄą╗ąĄąĮąĖąĄ. ąöą░ ąĖ ąĮąĄ ą▓čŗčĆąŠčü čÅ (ąĖ ą╝ąŠąĖ ąĘą░ą┐čĆąŠčüčŗ) ąĮą░ č鹊 čćč鹊ą▒čŗ čüčéčĆąŠąĖčéčī ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčāčÄ čüąĖčüč鹥ą╝čā.
ą©ą░čĆąĖą║, č鹊čé čćč鹊 ą┐ąŠą╗ą░ą│ą░ąĄčéčüčÅ ą┤ą╗čÅ čłą░čüčüąĖ ąĖ čÅ ą┤čāą╝ą░čÄ, ąŠąĮąŠ ą┤ąŠą╗ąČąĮąŠ ą▓čĆą░čēą░čéčīčüčÅ. ąĀčāą║ąŠą╣ ą║ąŠą│ą┤ą░ ą┐čĆąŠą▓ąŠąČčā - ąŠąĮąŠ ą║ą░čéąĖčéčüčÅ. ąØąŠ ąĮąĄ čäą░ą║čé, čćč鹊 ąŠąĮąŠ ą▓ čĆą░ą▒ąŠč湥ą╝ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄąĄ ą║ą░čéąĖčéčüčÅ. ąØąŠ čÅ ą┐ąŠą║ą░ čĆąĄčłąĖą╗ ąŠčéą╗ąŠąČąĖčéčī ą▓ąŠą┐čĆąŠčü čü ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄą╝ čüąĄąĮčüąŠčĆą░ - čģąŠčćčā ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ą║ą░ą║ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ. ąóąĄą╝ ą▒ąŠą╗ąĄąĄ, čćč鹊 ą▓ čéą░ą║ąŠą╝ ą┐ąŠą╗ąŠąČąĄąĮąĖąĖ ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ č鹊ąČąĄ ąĄčüčéčī ą┐ą╗čÄčüčŗ. ąĀą░čüčüč鹊čÅąĮąĖąĄ ą┤ąŠ ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéąĖ ąĖąĘą╝ąĄąĮčÅąĄčéčüčÅ ą│ąŠčĆą░ąĘą┤ąŠ ą╝ąĄąĮčīčłąĄ ą║ąŠą│ą┤ą░ čĆąŠą▒ąŠčé "ą║ą╗čÄčæčé". ąÆč湥čĆą░čüčī, ą┐čĆąĖą║čĆčāčéąĖą╗ 6 ą║ąŠąĮčåąĄą▓ąĖą║ąŠą▓, ą║ą░ą║ Bump sensor. ąØą░ą┐ą░čÅą╗ ą┐čĆąŠą▓ąŠą┤ą░ ąĖ ąĮą░ą║čĆąĄą╝ą┐ąĖčĆąŠą▓ą░ą╗ čĆą░ąĘčŖčæą╝čŗ. ąóą░ą║ ą║ą░ą║ ąĮąĄ ą┤ąŠą┤čāą╝ą░ą╗čüčÅ čüčĆą░ąĘčā ąĘą░ą║ą░ąĘą░čéčī ą┐ą╗ą░čéčŗ ą┤ą╗čÅ ą▒čāą╝ą┐ąĄčĆąŠą▓ (ą┐ą░čĆą░ ą▓čüąĄą│ąŠ 10 ą┤ąŠą╗ą╗ą░čĆąŠą▓). ąóąĄą┐ąĄčĆčī čā ą╝ąĄąĮčÅ čéą░ą╝ ąČą│čāčé ą┐čĆąŠą▓ąŠą┤ąŠą▓ ąĖ ą▒čāą┤ąĄčé čāąČąĄ ą┐čĆąŠą▒ą╗ąĄą╝ą░čéąĖčćąĮąŠ, ą║ąŠą│ą┤ą░ čÅ ąĘą░čģąŠčćčā ą┐ąŠčüčéą░ą▓ąĖčéčī čéą░ą╝ ąĄčēąĄ ąĖ ą┤ą░ą╗čīąĮąŠą╝ąĄčĆąĮčŗąĄ čüąĄąĮčüąŠčĆčŗ. ąóą░ą║ ąČąĄ čāą╝ąĄąĮčīčłąĖą╗ąŠčüčī ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠčéą▓ąĄčĆčüčéąĖą╣ ą║čāą┤ą░ čÅ ą╝ąŠą│ ą▒čŗ ą┐čĆąĖą║čĆčāčéąĖčéčī čüąĄąĮčüąŠčĆ čåą▓ąĄčéą░. ąØąŠ ąŠą▒ čŹč鹊ą╝ čÅ ą▒čāą┤čā čüąĄą│ąŠą┤ąĮčÅ ą▓ąĄč湥čĆąŠą╝ ą╗ąŠą╝ą░čéčī ą│ąŠą╗ąŠą▓čā. ąÆčĆąŠą┤ąĄ ąĄčüčéčī ą║čāą┤ą░ čāą┤ąŠą▒ąĮąŠ ą┐čĆąĖą║čĆčāčéąĖčéčī, ąĮąŠ ą║ą░ą▒ąĄą╗čī č鹊ą│ą┤ą░ ąĖą┤čæčé ąĮąĄ čāą┤ąŠą▒ąĮąŠ. ąÉ ąĘą░ ą│ą░ą▒ą░čĆąĖčéčŗ čÅ ą▓čŗą╗ąĄąĘą░čéčī ąĮąĄ čģąŠčćčā. ąóą░ą║ ą║ą░ą║ ą╗ą░ą▒ąĖčĆąĖąĮčéčī čüąŠčüč鹊ąĖčé ąĮąĄ č鹊ą╗čīą║ąŠ ąĖąĘ ą╗ąĖąĮąĖą╣, ąĮąŠ ąĖ ąĖąĘ čĆąĄą░ą╗čīąĮčŗčģ čüč鹥ąĮ, ąĘą░ ą║ąŠč鹊čĆčŗąĄ ą▓čŗčüčéčāą┐ą░čÄčēąĖąĄ č湥čüčéąĖ ą╝ąŠą│čāčé čåąĄą┐ą╗čÅčéčīčüčÅ. ąŻ ą╝ąĄąĮčÅ ą┐ąŠą║ą░ ąĄčēąĄ ąĄčüčéčī ąĘą░ą┐ą░čü, ą║ąŠąĮąĄčćąĮąŠ, čéą░ą║ čćč鹊 čÅ čüą╗ąĄą│ą║ą░ ą╝ąŠą│čā ą▓čŗą╗ąĄąĘčéąĖ, ąĮąŠ čŹč鹊 čĆčüčéą░ą▓ą╗čÄ ąĮą░ čüą░ą╝čŗą╣ ą▒ąĄąĘą▓čŗčģąŠą┤ąĮčŗą╣ čüą╗čāčćą░ą╣.
ąóąŠ čćč鹊 č乊čéą║ą░ ąĮąĄą▓ąĮčÅčéąĮą░čÅ - ą┐čĆąŠą▒ą╗ąĄą╝ą░ ą▓ č鹊ą╝, čćč鹊 ą┤ą╗čÅ ą▓č鹊čĆąŠą│ąŠ čĆąŠą▒ąŠčéą░ ą┐čĆąĖčłą╗ąŠčüčī ą▓čŗąĮčāčéčī ąĖąĘ ą▓čüąĄčģ ąĮąŠčĆą╝ą░ą╗čīąĮčŗčģ č乊č鹊ą░ą┐ą┐ą░čĆą░č鹊ą▓ "ą▒ą░čéą░čĆąĄą╣ą║ąĖ" ąĖ ąĄą┤ąĖąĮčüčéą▓ąĄąĮąĮčŗą╝ ąŠčüčéą░ą▓čłąĖą╝čüčÅ ą┐ąŠą┤ čĆčāą║ąŠą╣ ą┤ąĄą▓ą░ą╣čüąŠą╝ ąŠčüčéą░ą╗ą░čüčī ą║ą░ą╝ąĄčĆą░ ą┐ąŠ čéąĖą┐čā GoPro. ąĪąŠą▒čüčéą▓ąĄąĮąĮąŠ, ąĄčēąĄ ąŠą┤ąĮą░ čäąĖčłą║ą░, ą║ąŠč鹊čĆčāčÄ čÅ čüąŠą▒ąĖčĆą░čÄčüčī ą┐čĆąĖą┤ąĄą╗ą░čéčī čĆąŠą▒ąŠčéčā - ą║ąŠąĮčéčĆąŠą╗čī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą▒ą░čéą░čĆąĄąĖ. ąÉ č鹊 čüąŠ čüčéą░čĆčŗą╝ ą▒čŗą╗ąŠ ą┐ą░čĆčā čĆą░ąĘ, ą║ąŠą│ą┤ą░ čćč鹊-č鹊 ą▓ą┤čĆčāą│ ą┐ąĄčĆąĄčüčéą░čæčé čĆą░ą▒ąŠčéą░čéčī ąĖ ąĮą░čćąĖąĮą░ąĄčī ąĖčüą║ą░čéčī ąŠčłąĖą▒ą║čā. ąÉ ą▓ ą║ąŠąĮčåąĄ, ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ, čćč鹊 ą┐ąŠąŠčüč鹊 čüąĄą╗ąĖ ą▒ą░čéą░čĆąĄą╣ą║ąĖ.
ą¤ąŠ ą┐ąŠą▓ąŠą┤čā OPT3101 čŹč鹊 ą┐čĆąŠčüč鹊 ą┤ąŠą│ą░ą┤ą║ąĖ. ąØą░ čüą░ą╝ąŠą╝ čłą░čüčüąĖ ąĖ ąĮą░ "ą▒ą░ąĘąŠą▓ąŠą╣" ą┐ą╗ą░č鹥 ąĮąĖč湥ą│ąŠ ąĮąĄčé. ąóąĄą╝ ą▒ąŠą╗ąĄąĄ ą║ąŠą╗čīčåąĄą▓čŗčģ 菹║čĆą░ąĮąŠą▓ "ą┐ąŠą║čĆčŗčéčŗčģ ąĖą╝ą╝ąĄčĆčüąĖąŠąĮąĮčŗą╝ ąĘąŠą╗ąŠč鹊ą╝" (ą║ą░ą║ ąĮą░ čŹč鹊ą╝ evaluation kit). ą¤ąŠčüą╝ąŠčéčĆąĄą╗ ąĮą░ čüą░ą╣č鹥 pololu ąĮą░ ąĖčģ ą╝ąŠą┤čāą╗ąĖ ToF vl61xx, vl53xxx - čéą░ą╝, ą║ąŠąĮąĄčćąĮąŠ, ąĮą░ čłąĖąĮčā ąĄčüčéčī ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗ąĖ čāčĆąŠą▓ąĮąĄą╣ ą░ ą▓ąŠčé ąĮą░ ą▓čģąŠą┤ čüą▒čĆąŠčüą░ ąĮąĄčé. ąźąŠčéčÅ, čéą░ą╝ ą╝ąŠąČąĮąŠ ą▓čüčéą░ą▓ąĖčéčī ą▓čüąĄą│ąŠ ą┤ąĖąŠą┤ čü ą┐ąŠą┤čéčÅąČą║ąŠą╣. ąöą░ ą▓ąŠčé č鹊ą╗čīą║ąŠ ąĄčēąĄ ą┐ąŠą┐čāčéąĮąŠ ą┐čĆąŠą▒ą╗ąĄą╝ą░ ą▓čüą┐ą╗čŗą╗ą░ - čā č鹊ą│ąŠ ą╝ąŠą┤čāą╗čÅ, čćč鹊 čÅ čüą╝ąŠčéčĆąĄą╗ (ą▓čĆąŠą┤ąĄ, vl53xxx) i2c ą░ą┤čĆąĄčü 0x29 - čéą░ą║ąŠą╣ ąČąĄ ą║ą░ą║ ąĖ čā čüąĄąĮčüąŠčĆą░ čåą▓ąĄčéą░ - ą║ą░ą║ ąĖčģ čĆą░ąĘčĆčāą╗ąĖčéčī? ą┤ąĄą╗ą░čéčī ąŠčéą┤ąĄą╗čīąĮčāčÄ čłąĖąĮčā? ąØčā, ą┐ąŠą║ą░ čŹč鹊 ą┤ąĄą╗ąŠ ą┤ą░ą╗čæą║ąŠą│ąŠ ą▒čāą┤čāčēąĄą│ąŠ. ą» čģąŠčćčā čüą┤ąĄą╗ą░čéčī čĆąŠą▒ąŠčéą░ ą║ąŠč鹊čĆčŗą╣ ąŠčĆąĖąĄąĮčéąĖčĆčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┐ąŠ čüč鹥ąĮą░ą╝ ąĮąŠ čüąĮą░čćą░ą╗ą░ ąĮą░ą┤ąŠ ą┐čĆąĖą┤čāą╝ą░čéčī ą║ą░ą║ ą┤ąŠą╝ą░ čüą┤ąĄą╗ą░čéčī ą┐ąŠą╗ąĖą│ąŠąĮ ą┤ą╗čÅ č鹥čüčéą░.
_________________
ąÉ ą╗čÄą┤ąĖ ą┐ąŠčüą╝ąŠčéčĆčÅčé ąĖ čüą║ą░ąČčāčé: "ąĪąŠą▒ą░ą║ąĖ ą╗ąĄčéčÅčé. ąÆąŠčé ąĖ ąŠčüąĄąĮčī."
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Ser60
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ąŠą║čé 22, 2019 21:13:39 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 74
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 607
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą┤ąĄą║ 24, 2008 09:58:58
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3715
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 3
|
|
ToF čüąĄąĮčüąŠčĆčŗ VL53xxx - čŹč鹊 ą╝ąŠą┤ąĄą╗ąĖ ą┐ąĄčĆą▓ąŠą│ąŠ ą┐ąŠą║ąŠą╗ąĄąĮąĖčÅ, ą░ VL68xxx - ą▓č鹊čĆąŠą│ąŠ. ąĢčüą╗ąĖ čüčéą░ą▓ąĖčéčī, č鹊 ą╗čāčćčłąĄ ą┐ąŠčüą╗ąĄą┤ąĮąĖąĄ. ąöąĄč乊ą╗čéąĮčŗą╣ ą░ą┤čĆąĄčü čā ąŠą▒ąŠąĖčģ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╣ 0čģ29, ąĮąŠ ąĄčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐ąĄčĆąĄą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖčģ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ąĮą░ ą╗čÄą▒ąŠą╣ ą┤čĆčāą│ąŠą╣. ąÜąŠąĮąĄčćąĮąŠ, ąĮą░ čŹč鹊 ą▓čĆąĄą╝čÅ ą┤ą░čéčćąĖą║ čåą▓ąĄčéą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓čŗą║ą╗čÄč湥ąĮ. ąÆčģąŠą┤ čüą▒čĆąŠčüą░ (GPIO0) ą╝ąŠąČąĮąŠ ą┐čĆąŠčüč鹊 ą┐ąŠą┤čéčÅąĮčāčéčī ąĮą░ 2.8ą▓ čĆąĄąĘąĖčüč鹊čĆąŠą╝ ąĖ ą┐ąŠč鹊ą╝ ąĮąĄ čéčĆąŠą│ą░čéčī. ąĪąĄąĮčüąŠčĆ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄčé ąĮąĖčćč鹊ąČąĮčŗą╣ č鹊ą║ ą▓ čĆąĄąČąĖą╝ą░čģ hard ąĖ soft čĆąĄčüąĄčéą░. ąĪąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ, ąĖ ą┐ąĖąĮ ąŠčé ą£ąÜ ą║ ąĮąĄą╝čā ą╝ąŠąČąĮąŠ ąĮąĄ čéą░ąĮčāčéčī. ąÉ ąĄčüą╗ąĖ čģąŠč湥čéčüčÅ ąĘą░čĆąĄčüąĄčéąĖčéčī ą┤ą░čéčćąĖą║ ą┐ąĖąĮąŠą╝ ąŠčé ą£ąÜ, ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ čüą╗ąĄą┤čāąĄčé ą┐čĆąŠčüč鹊 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą║ą░ą║ open drain. ą¤čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī čāčĆąŠą▓ąĮčÅ ąĮą░ čŹč鹊čé ą┐ąĖąĮ ą▓ ą╗čÄą▒ąŠą╝ čüą╗čāčćą░ąĄ ąĮąĄ ąĮčāąČąĄąĮ.
ą¤čĆą░ą▓ąĖą╗čīąĮąŠ-ą╗ąĖ čÅ ą┐ąŠąĮąĖą╝ą░čÄ, čćč鹊 čĆąŠą▒ąŠčé ą║ą╗čÄčæčé ąĮąŠčüąŠą╝ č鹊ą╗čīą║ąŠ ą▓ąŠ ą▓čĆąĄą╝čÅ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą▓ąŠčĆąŠčéą░, ą░ ą▓ ąŠčüčéą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ ą┐čĆąĖ ą┤ą▓ąĖąČąĄąĮąĖąĖ ąŠą┐ąĖčĆą░ąĄčéčüčÅ ąĮą░ ąĘą░ą┤ąĮąĖą╣ čłą░čĆąĖą║? ąĢčüą╗ąĖ čéą░ą║, č鹊 ą╝ąŠąČąĄčé čüąĮčÅčéčī ą┐ąĄčĆąĄą┤ąĮąĖą╣ čłą░čĆąĖą║ ąĖ ąĘą░ą╝ąĄąĮąĖčéčī ąĄą│ąŠ ą┤ą▓čāą╝čÅ ą▒ąŠą╗čéą░ą╝ąĖ ą┐ąŠ ą║čĆą░čÅą╝ ą┐ą╗ą░čéčŗ, ąĮą░ ą║ąŠč鹊čĆčŗąĄ čĆąŠą▒ąŠčé ą▒čāą┤ąĄčé ąĖąĮąŠą│ą┤ą░ ąŠą┐ąĖčĆą░čéčīčüčÅ ą┐čĆąĖ ą║ą╗čæą▓ąĄ ąĮąŠčüąŠą╝. ąóąŠą│ą┤ą░ čüąĄąĮčüąŠčĆ ą╗ąĖąĮąĖąĖ ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé ą▓ą┐ąĄčĆčæą┤ ąĮą░ ąŠčüą▓ąŠą▒ąŠą┤ąĖą▓čłąĄąĄčüčÅ ą╝ąĄčüč鹊 ą┐ąŠą┤ą▓ąĖąĮčāčéčī.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
uldemir
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąŠą║čé 23, 2019 05:49:44 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214
ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
ąöą░, čĆąŠą▒ąŠčé ą║ą╗čÄčæčé ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮčŗčģ čāčüą║ąŠčĆąĄąĮąĖčÅčģ. ąś ą┐čĆąŠą▒ą╗ąĄą╝ą░ čüąŠą▒čüčéą▓ąĄąĮąĮąŠ ą▓ č鹊ą╝, čćč鹊 čüąĄąĮčüąŠčĆ ą╗ąĖąĮąĖąĖ ą┐ąĄčĆąĄčüčéą░čæčé ą▓ąĖą┤ąĄčéčī. ą¤ąŠčŹč鹊ą╝čā čÅ ą▒čŗą╗ čāąČąĄ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░ą▓čłąĖ čüą┤ąĄą╗ą░čéčī "ą╗čŗąČąĖ" ą┐ąŠ ą▒ąŠą║ą░ą╝ čŹč鹊ą│ąŠ čüąĄąĮčüąŠčĆą░, čćč鹊ą▒čŗ ąŠąĮ ąĮąĄ ą╝ąŠą│ ą┐čĆąĖą▒ą╗ąĖąĘąĖčéčīčüčÅ ą║ ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéąĖ ą╝ąĄąĮčīčłąĄ č湥ą╝ ąĮą░ 0.5ą╝ą╝, ąĮąŠ č鹥ą┐ąĄčĆčī, čŹčéąĖ ą╗čŗąČąĖ čüčéą░ą╗ąĖ čåąĄą┐ą╗čÅčéčīčüčÅ ąĘą░ čüčéčŗą║ąĖ ą╝ąĄąČą┤čā ą║ą╗ąĄč鹊čćą║ą░ą╝ąĖ ą╗ą░ą▒ąĖčĆąĖąĮčéą░. ą¤ąŠčŹč鹊ą╝čā, čÅ ąĖ ą▓ąŠąĘą╗ą░ą│ą░čÄ ąĮą░ą┤ąĄąČą┤čŗ ąĮą░ ąĮąŠą▓čŗą╣ čüąĄąĮčüąŠčĆ - ąŠąĮ čĆą░ą▒ąŠčéą░ąĄčé čü ą▒ąŠą╗čīčłąĄą│ąŠ čĆą░čüčüč鹊čÅąĮąĖčÅ ą┤ąŠ ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéąĖ. ąĪ čŹčéąĖą╝ąĖ ToF čüąĄąĮčüąŠčĆą░ą╝ąĖ čéą░ą║ą░čÅ ąĖčüč鹊čĆąĖčÅ, čćč鹊 čÅ čāąČąĄ ą║ąŠą│ą┤ą░-č鹊 ą║čāą┐ąĖą╗ ąĮą░ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī ąĮą░ ebay 6180, ąĮąŠ ąŠąĮąĖ ąĮąĄ ąĖą╝ąĄčÄčé ąĮą░ ą▒ąŠčĆčéčā ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗ąĄą╣ čāčĆąŠą▓ąĮčÅ. ą¤ąŠčŹč鹊ą╝čā ą╝ąĮąĄ čéą░ą║ ąĖ čéą░ą║ ą┐čĆąĖą┤čæčéčüčÅ ą┤ąĄą╗ą░čéčī ąĄčēąĄ ąŠą┤ąĮčā ą┐ą╗ą░čéą║čā čü čüąŠą│ą╗ą░čüąŠą▓ą░č鹥ą╗ąĄą╝. ąś ą╝ąŠąČąĄčé, čÅ čéą░ą╝ ąČąĄ ą┐ąŠčüčéą░ą▓ą╗čÄ i2c čĆą░čüčłąĖčĆąĖč鹥ą╗čī ą┐ąŠčĆč鹊ą▓, ą┤ą╗čÅ čāą┤ąĄčƹȹĖą▓ą░ąĮąĖčÅ ą┤ą░čéčćąĖą║ąŠą▓ ą▓ čüą▒čĆąŠčüąĄ, ą┐ąŠą║ą░ čÅ ąĖą╝ ą┐ąŠąŠč湥čĆąĄą┤ąĮąŠ ą▒čāą┤čā ą╝ąĄąĮčÅčéčī ą░ą┤čĆąĄčüą░. ąÆąŠčé č鹊ą╗čīą║ąŠ ąĮą░ą┤ąŠ ą│ą╗čÅąĮčāčéčī, ąĮąĄ ą┤ąĄą╗ą░čÄčé ą╗ąĖ ą║ąŠą╝ą░ąĮą┤čŗ čüą╝ąĄąĮčŗ ą░ą┤čĆąĄčüą░ čćč鹊-ąĮąĖą▒čāą┤čī ą┤ąĄčüčéčĆčāą║čéąĖą▓ąĮąŠą│ąŠ ą┤ą╗čÅ ą┤ą░čéčćąĖą║ą░ čåą▓ąĄčéą░ - č鹊ą│ą┤ą░ ąŠąĮąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąŠčüč鹊 ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮčŗą╝ąĖ. ąśą╗ąĖ ą┐čĆąĖą┤čæčéčüčÅ ąĖčüą║ą░čéčī TCS34721- č鹥 ą▓čŗą┐čāčüą║ą░čÄčéčüčÅ čü ą░ą┤čĆąĄčüąŠą╝ 0čģ39. ąóčāčé ą┐čĆąĖčłą╗ąĖ ą┐ą╗ą░čéčŗ, čćč鹊 čÅ ą┐čĆąĖą┤čāą╝ą░ą╗ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┤ąĖčüą┐ą╗ąĄčÅ čü ą║ąĮąŠą┐ą║ą░ą╝ąĖ. ąÜąŠąĮąĄčćąĮąŠ, č鹊 čćč鹊 čÅ ąĘą░ą┤čāą╝ą░ą╗ ą║čĆčāč鹊 ąŠą▒ą╗ąŠą╝ąĖą╗ąŠčüčī - ą┤ąĖčüą┐ą╗ąĄą╣ ąĮą░ 1.3" ąĮąĄ ą▒čāą┤ąĄčé (ą▓ąŠąĘą╝ąŠąČąĮąŠ ą┐ąŠą║ą░), ą║ąĮąŠą┐ą║ąĖ ąĮą░ą┤ąŠ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī ą▓ ą┤čĆčāą│ąŠąĄ ą╝ąĄčüč鹊. ąØąŠ ą┐čĆąĖą┤ąĄą╗ą░ą╗ ą┤ąĖčüą┐ą╗ąĄą╣ 0.96" - čüą╝ąŠčéčĆąĖčéčüčÅ ąĮąĄ ą┐ą╗ąŠčģąŠ. ąØą░ą┤ąĄčÄčüčī, čüąĄą│ąŠą┤ąĮčÅ čüą┤ąĄą╗ą░čéčī ą║ąĮąŠą┐ą║ąĖ - ą┐ąŠčÅą▓ąĖčéčüčÅ ą║čāčćą║ą░ ą┐čĆąŠą▓ąŠą┤ąŠą▓. ąĪąŠą▒čüčéą▓ąĄąĮąĮąŠ ą║čāčćą║ą░ čāąČąĄ ąĄčüčéčī, ą┤ąŠ ą┤ąĖčüą┐ą╗ąĄčÅ ąĖą┤čæčé ą║ąŠčĆąŠč鹥ąĮčīą║ąĖą╣ ą║ą░ą▒ąĄą╗čī čü ą┤ą▓čāą╝čÅ JST čĆą░ąĘčŖčæą╝ą░ą╝ąĖ. ąØą░ ą▓čŗčģąŠą┤ąĮčŗčģ, ą║ąŠą│ą┤ą░ ą▒čāą┤ąĄčé ąĄčüč鹥čüčüčéą▓ąĄąĮąĮąŠąĄ ąŠčüą▓ąĄčēąĄąĮąĖąĄ čāčüč鹊čÄ č乊č鹊čüąĄčüčüąĖčÄ. ąźąŠčéčÅ čüąĄą╣čćą░čü ą┤čāą╝ą░čÄ, ą░ ąĮąĄ čüą┤ąĄą╗ą░čéčī ą╗ąĖ ą║ąĮąŠą┐ą║ąĖ č湥čĆąĄąĘ i2c ą║ą░ą║ ąĮą░ čĆąŠą▒ąŠčéą░čģ čüą╗ąĄą┤čāčÄčēąĖčģ ą┐ąŠ ą╗ąĖąĮąĖąĖ. ąöą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąĮą░ ą▒ą░ąĘąŠą▓čāčÄ ą┐ą╗ą░čéčā ą┐čĆąĖą┐ą░čÅčéčī čĆą░ąĘčŖčæą╝ ą┐čĆąĖčłą╗ąŠčüčī ą┤ąĄą╗ą░čéčī ą┐ąŠą╗ąĮčāčÄ čĆą░ąĘą▒ąŠčĆą║čā. ąś ą▒čŗą╗ą░ ąĖą┤ąĄčÅ ą║čāą┤ą░ ą┐ąŠą┤čüąŠąĄą┤ąĖąĮąĖčéčī i2c ąŠčé čüąĄąĮčüąŠčĆą░ čåą▓ąĄčéą░, ąĮąŠ ąŠą▒ą╗ąŠą╝ąĖą╗čüčÅ. ąóą░ą╝ ą▓ ąŠą┤ąĮąŠą╝ ą╝ąĄčüč鹥 ąĄčüčéčī ą║ąŠąĮčéą░ą║čéąĖą║ąĖ scl/sda, ąĮąŠ čĆčÅą┤ąŠą╝ čü ąĮąĖą╝ąĖ ąĮąĄ Vcc/Gnd, ą░ 3.3ą▓ ąĖ 5ą▓ (Gnd ąĖą┤čæčé čüą╗ąĄą┤ąŠą╝, ąĮąŠ čéčāą┤ą░ čāąČąĄ ą▓ą┐ą░čÅąĮ čĆą░ąĘčŖčæą╝ ą┤ą╗čÅ bump čüąĄąĮčüąŠčĆąŠą▓. ąöą░ ąĖ ąĮą░ą┤ąĄąČą┤ą░ ą▓ą┐ą░čÅčéčī čéą░ą╝ čĆą░ąĘčŖąĄą╝, čćč鹊ą▒čŗ čüąĮąĖąĘčā ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą▓ąŠčéą║ąĮčāčéčīčüčÅ - čĆą░ąĘą▓ąĄčÅą╗ą░čüčī, čéą░ą║ ą║ą░ą║ ąŠą║ąĮąŠ ą▓ čłą░čüčüąĖ ąĮąĄ ą┤ąŠčüčéą░č鹊čćąĮąŠ ą┤ą╗čÅ čŹč鹊ą│ąŠ čłąĖčĆąŠą║ąŠąĄ - scl/sda čéą░ą╝ ąĮąĄ ą┐čĆąŠą╗ąĄąĘčāčé. ąĪą░ą╝ čüąĄąĮčüąŠčĆ čåą▓ąĄčéą░ ą┐ąŠą║ą░ ą┐čĆąĖą║čĆčāčéąĖą╗ ąĮą░ ąŠą┤ąĮąŠą╝ ą▓ąĖąĮč鹥, ą║ąŠč鹊čĆčŗą╣ ą┤ąĄčƹȹĖčé ąŠą┤ąĖąĮ ąĖąĘ ą║ąŠąĮčåąĄą▓ąĖą║ąŠą▓. ąØąŠ čÅ ą┤čāą╝ą░čÄ, čéą░ą╝ ą┐ąŠą▒ą╗ąĖąĘąŠčüčéąĖ ąĄčüčéčī ąĄčēąĄ ąŠą┤ąĮąŠ ą╝ąĄčüč鹊 ą│ą┤ąĄ ą┤ąŠčüčéčāą┐ąĄąĮ i2c ąĖ čéą░ą╝ ą┐ą╗ą░ąĮąĖčĆčāčÄ čéą░ą║ ąČąĄ ą▓ą┐ą░čÅčéčī JST ą║ąŠąĮąĮąĄą║č鹊čĆ ą┤ą╗čÅ čŹč鹊ą│ąŠ čüąĄąĮčüąŠčĆą░. ą¤ąŠą┐čāčéąĮąŠ, ą┐čŗčéą░čÄčüčī ąĮą░ ąĮąĄčéą▒čāą║ ą┐ąŠčüčéą░ą▓ąĖčéčī ą║ąŠą╝ą┐ąĖą╗čÅč鹊, čćč鹊ą▒čŗ ą╗ą░ą▒čŗ ą┐čĆąŠąĖą╝ą┐ąŠčĆčéąĖčĆąŠą▓ą░čéčī. ą¦č鹊-č鹊 ąĮąĄ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ. ąÆ čüąŠąŠą▒čēąĄąĮąĖąĖ ąŠą▒ ąŠčłąĖą▒ą║ąĄ ą┐čĆąĄą┤ą╗ą░ą│ą░ąĄčéčüčÅ ą┐ąŠčüčéą░ą▓ąĖčéčī ąĄą│ąŠ čéčĆąĄą╝čÅ čĆą░ąĘąĮčŗą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ, ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ąĖąĘ ą║ąŠč鹊čĆčŗčģ čüą║ą░čćą░čéčī ąŠčéčüčÄą┤ą░, ąĮąŠ ą┐ąŠą║ą░ ą╝ąĮąĄ čéą░ą╝ ą▓čŗą┤ą░čæčé, čćč鹊 ąĮąĄą┤ąŠčüčéčāą┐ąĮąŠ - ąĖą┤čāčé ą┐ą╗ą░ąĮąŠą▓čŗąĄ čĆą░ą▒ąŠčéčŗ. ą×ą║, ą┐ąŠą┤ąŠąČą┤čæą╝.
_________________
ąÉ ą╗čÄą┤ąĖ ą┐ąŠčüą╝ąŠčéčĆčÅčé ąĖ čüą║ą░ąČčāčé: "ąĪąŠą▒ą░ą║ąĖ ą╗ąĄčéčÅčé. ąÆąŠčé ąĖ ąŠčüąĄąĮčī."
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
uldemir
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ąŠą║čé 25, 2019 05:47:14 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214
ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
|
ą£ąŠą╣ ąĘąĮą░ą║ąŠą╝čŗą╣, ą║ąŠč鹊čĆčŗą╣ ąĖ ąĘą░ą▓ą╗čæą║ ą▓ čŹčéąĖ ą╝ąĄčĆąŠą┐čĆąĖčÅčéąĖčÅ, ą┤ą╗čÅ čĆąŠą▒ąŠčéą░ čāč湥čüčéą▓čāčÄčēąĄą│ąŠ ą▓ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖąĖ FolkRace ą┐čŗčéą░ą╗čüčÅ ą┐čĆąĖą╝ąĄąĮąĖčéčī vl53xx - ąĖą╝ąĄąĮąĮąŠ ąĖąĘ-ąĘą░ ą┤ą░ą╗čīąĮąĄą│ąŠ čĆą░ą┤ąĖčāčüą░ ą┤ąĄą╣čüčéą▓ąĖčÅ. ąØąŠ čéą░ą╝ čłąĖčĆąĖąĮą░ čéčĆą░čüčüčŗ ą┐ąŠą┤ ą╝ąĄčéčĆ, čéą░ą║ čćč鹊 60čüą╝ ą┤ą╗čÅ vl6180 čéą░ą╝ ą╝ą░ą╗ąŠą▓ą░č鹊. ą£ąĮąĄ ąČąĄ, ąĮą░ą┤ąŠ ą▒čŗ ą┐ąĄčĆąĄčćąĖčéą░čéčī čāčüą╗ąŠą▓ąĖčÅ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖą╣ - ą║ą░ą║ąĖąĄ čéą░ą╝ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čüč鹥ąĮ ąĘą░čÅą▓ą╗ąĄąĮčŗ ąĖ ą║ą░ą║ąĖąĄ čĆą░čüčüč鹊čÅąĮąĖčÅ ą▒čāą┤čāčé ą░ą║čéčāą░ą╗čīąĮčŗ. ą£ąĮąĄ ą║ą░ąČąĄčéčüčÅ, čćč鹊 čłąĖčĆąĖąĮą░ ą▒čŗą╗ą░ 30čüą╝, čéą░ą║ čćč鹊 ą▓ 60čüą╝ čāą║ą╗ą░ą┤čŗą▓ą░čÄčüčī, ąĄčüą╗ąĖ čüčéą░ą▓ąĖčéčī čüąĄąĮčüąŠčĆčŗ ą┐ąŠą┤ čāą│ą╗ąŠą╝ 45 ą│čĆą░ą┤.
ąÉ ą┐ąŠą║ą░ čÅ ąĘą░ą┐čāčüčéąĖą╗ ąĮąŠą▓ąŠą│ąŠ čĆąŠą▒ąŠčéą░ ąĮą░ čéčĆą░čüčüčā. ąĪą┤ąĄą╗ą░ą╗ ą║ąĮąŠą┐ąŠčćą║ąĖ, čüą║ąŠčĆčĆąĄą║čéąĖčĆąŠą▓ą░ą╗ ą┐ąŠčĆąŠą│ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ čüąĄąĮčüąŠčĆą░ ą╗ąĖąĮąĖąĖ (čü 400 ąĮą░ 800ą╝ą║čü ą┐ąĄčĆąĄčüčéą░ą▓ąĖą╗) - ą╗ąĖąĮąĖčÄ čüčéą░ą╗ ą▓ąĖą┤ąĄčéčī. ąÆąŠčé č鹊ą╗čīą║ąŠ ąĖąĘ-ąĘą░ ą▒ą╗ąĖąĘą║ąŠą│ąŠ čĆą░čüčüč鹊čÅąĮąĖčÅ čüąĄąĮčüąŠčĆą░ ą║ ąŠčüąĖ ą║ąŠą╗čæčü ąĮą░ą┤ąŠ ą▒čŗ ą┐ąŠą┤ą║ąŠčĆčĆąĄą║čéąĖčĆąŠą▓ą░čéčī ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ čāą┤ąĄčƹȹĖą▓ą░čÄčēąĖąĄ čĆąŠą▒ąŠčéą░ ąĮą░ ą╗ąĖąĮąĖąĖ. ąŚą░ą╝ąĄčéąĖą╗, čćč鹊 ą┐ąŠčüą╗ąĄ čĆą░ąĘą▓ąŠčĆąŠčéą░ ą▓ čéčāą┐ąĖą║ąĄ, čĆąŠą▒ąŠčé ąĮą░čćą░ą▓ ą┤ą▓ąĖą│ą░čéčīčüčÅ, čåąĄą┐ą╗čÅąĄčé ą║čĆą░ą╣ąĮąĖą╝ąĖ čüąĄąĮčüąŠčĆą░ą╝ąĖ ą╗ąĖąĮąĖčÄ, ą┐ąŠą╗čāčćą░čÅ ą╗ąĖčłąĮąĖą╣ ą╗ąŠąČąĮčŗą╣ ą┐ąŠą▓ąŠčĆąŠčé. ąØčā ąĖą╗ąĖ, ą╝ąŠąČąĄčé, ą┐ąŠą▓ąŠčĆąŠčé ą┤ąĄą╗ą░čéčī "ą│ą╗čāą▒ąČąĄ". ąØąŠ čŹč鹊 ąĮą░ą┤ąŠ ą▒čŗ ąĄčēąĄ ą┐čĆąŠą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī.
ą¤ąĄčĆąĄčćąĖčéą░ą╗ ą▓ąĮąĖą╝ą░č鹥ą╗čīąĮąĄąĄ ą│ą╗ą░ą▓čā ą┐čĆąŠ i2c - ą▓čüčæ ąČąĄ ąĮąĄ ą┐ąŠąĮąĖą╝ą░čÄ, ą┐ąŠč湥ą╝čā čā ą╝ąĄąĮčÅ ą▒ąĄąĘ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ č鹥čĆčÅą╗čüčÅ ą┐ąĄčĆą▓čŗą╣ ą▒ą░ą╣čé. ąÆ ą║ąĮąĖąČą║ąĄ ą┐čĆąĖą╝ąĄčĆ ą┐ąŠčüčéčĆąŠąĄąĮ ą┐ąŠ čéą░ą║ąŠą╝čā ąČąĄ ą┐čĆąĖąĮčåąĖą┐čā. ąĢą┤ąĖąĮčüčéą▓ąĄąĮąĮąŠąĄ ąŠčéą╗ąĖčćąĖąĄ - čéą░ą╝ ąĄčēąĄ ą┐čĆąŠą▓ąĄčĆčÅąĄčéčüčÅ čäą╗ą░ą│ ą┐ąŠč鹥čĆąĖ ą░čĆą▒ąĖčéčĆą░ąČą░, ąĮąŠ čŹč鹊 ąĮąĄ ą║čĆąĖč鹥čĆąĖą╣ ą▓ ą┤ą░ąĮąĮąŠą╣ čüąĖčéčāą░čåąĖąĖ. ąŚą░č鹊 ą▓ čüą▓ąŠą╣ "ą┤čĆą░ą╣ą▓ąĄčĆ" ą┤ąŠą▒ą░ą▓ąĖą╗ ąŠą▒čĆą░ą▒ąŠčéą║čā ą┐ąŠč鹥čĆąĖ ą░čĆą▒ąĖčéčĆą░ąČą░ - ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąŠčłąĖą▒ą║čā ąĖ ąŠčéą▓ą░ą╗ąĖą▓ą░ąĄčéčüčÅ.
_________________
ąÉ ą╗čÄą┤ąĖ ą┐ąŠčüą╝ąŠčéčĆčÅčé ąĖ čüą║ą░ąČčāčé: "ąĪąŠą▒ą░ą║ąĖ ą╗ąĄčéčÅčé. ąÆąŠčé ąĖ ąŠčüąĄąĮčī."
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
uldemir
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ąŠą║čé 27, 2019 09:51:11 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214
ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
ąÆąŠčé, ą▓č湥čĆą░ ąŠčéč乊č鹊ą│čĆą░čäąĖčĆąŠą▓ą░ą╗:       ą¤ą╗ą░čéčā čü ą┤ąĖčüą┐ą╗ąĄąĄą╝ ąĖ ą║ąĮąŠą┐ą║ą░ą╝ąĖ čüą┤ąĄą╗ą░ą╗ "ą║ąŠčłąĄčĆąĮąŠą│ąŠ" čåą▓ąĄčéą░, čćč鹊ą▒čŗ ą▒čŗą╗ąŠ ą▓ ąŠą┤ąĮąŠą╝ čüčéąĖą╗ąĄ. ąĢą┤ąĖąĮčüčéą▓ąĄąĮąĮąŠąĄ, čćč鹊 ą▓čŗą┤ą░čæčé, čćč鹊 čĆąŠą▒ąŠčé čüą┤ąĄą╗ą░ąĮ ąĮąĄ ąĮą░ ą▒ą░ąĘąĄ ą║ąŠą╝ą┐ą╗ąĄą║čéą░ čĆą░čüčüčŗą╗ą░ąĄą╝ąŠą│ąŠ TI - ą║ąŠą╗čæčüą░ ą▒ąĄą╗ąŠą│ąŠ čåą▓ąĄčéą░. ąÆ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╝ ą║ąŠą╝ą┐ą╗ąĄą║č鹥 ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą║čĆą░čüąĮąŠą│ąŠ. ąÆąŠčé ą║ą░ą║ ą┐ąŠą║ą░ ą┐čĆąĖą║čĆčāčéąĖą╗ čåą▓ąĄč鹊ą▓ąŠą╣ čüąĄąĮčüąŠčĆ:  ąöą░, ąĘąĮą░čÄ, čćč鹊 ą│ą░ąĄč湥ą║ ąĮąĄ čģą▓ą░čéą░ąĄčé. ąś ą┐ąŠą║ą░ ą╗ąŠą╝ą░čÄ ą│ąŠą╗ąŠą▓čā ą║čāą┤ą░ ą┐čĆąŠą▓ąŠą┤ą░ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī. ąĢčüą╗ąĖ ą▓ąĘčÅčéčī ąĖ ą┐čĆąŠą▓ąŠą┤ą░ ą┐čĆąŠčüč鹊 ą▓ą┐ą░čÅčéčī ą▓ ą┐ą╗ą░čéčā ą┐ąĖčéą░ąĮąĖčÅ - ą┐čĆąŠą▒ą╗ąĄą╝ ąĮąĄčé, ąĮąŠ ąĄčüą╗ąĖ čÅ čģąŠčćčā čéą░ą╝ ą┐ąŠčüčéą░ą▓ąĖčéčī čĆą░ąĘčŖčæą╝ - ą┤ą╗čÅ čĆą░ąĘčŖčæą╝ą░ ą╝ąĄčüčéą░ čāąČąĄ ąŠčüąŠą▒ąŠ ąĮąĄčé. ąÉ ą▓ąŠčé ą║ą░ą║ ą▓čŗą│ą╗čÅą┤ąĖčé ą┤ąĮąĖčēąĄ ąĖ čüą░ą╝ ą▓ąĄč鹥čĆą░ąĮ:   ąöą╗čÅ čŹč鹊ą╣ č乊č鹊 čüąĄčüčüąĖąĖ, ą┐ąŠčüčéą░ą▓ąĖą╗ ą▒ą░čéą░čĆąĄą╣ą║ąĖ ąĮą░ ąĘą░čĆčÅą┤ą║čā ąĖ ą┐ąŠčüą╗ąĄ čüąĄčüčüąĖąĖ, ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░ą╗ ą┐ąŠą│ąŠąĮčÅčéčī čĆąŠą▒ąŠčéą░ ą┐ąŠ ą╗ą░ą▒ąĖčĆąĖąĮčéčā. ąĀąŠą▒ąŠčé čüčéą░ą╗ čüąŠą▓čüąĄą╝ ąĮąĄ čāą┐čĆą░ą▓ą╗čÅąĄą╝. ąś ąŠčüąŠą▒ąĄąĮąĮąŠ ą▓ čéčāą┐ąĖą║ą░čģ, ą▓čŗčüą║ą░ą║ąĖą▓ą░ą╗ čéą░ą║, čćč鹊 ąĮą░čćąĖąĮą░ą╗ ą║čĆčāčéąĖčéčīčüčÅ ąĮą░ ą╝ąĄčüč鹥, čéą░ą║ ą║ą░ą║ ąĮąĄ ą╝ąŠą│ ąĮą░ą╣čéąĖ ą╗ąĖąĮąĖčÄ. ą¤ąŠčŹč鹊ą╝čā, čÅ čĆąĄčłąĖą╗ čüą┤ąĄą╗ą░čéčī čĆąŠą▒ąŠčéčā ą┐ąŠą▓ąŠčĆąŠčé ą┐ąŠ čéą░čģąŠą┤ą░čéčćąĖą║čā. ą┐čĆąĖą║ąĖąĮčāą╗, čćč鹊 ąĮą░ č湥čéą▓ąĄčĆčéčī ąŠą║čĆčāąČąĮąŠčüčéąĖ ąŠą┤ąĮąŠ ą║ąŠą╗ąĄčüąŠ ą┐čĆąŠčģąŠą┤ąĖčé 200 ąĖą╝ą┐čāą╗čīčüąŠą▓. ą¤ąŠčŹč鹊ą╝čā, ą┐ąĄčĆąĄą┤ ą┐ąŠą▓ąŠčĆąŠč鹊ą╝, čäąĖą║čüąĖčĆčāčÄ čĆą░ąĘąĮąĖčåčā ą┐ąŠą║ą░ąĘą░ąĮąĖą╣ čéą░čģąŠą┤ą░čéčćąĖą║ąŠą▓ ąĖ ą║čĆčāčćčā čĆąŠą▒ąŠčéą░, ą┐ąŠą║ą░ čĆą░ąĘąĮąĖčåą░ ąĮąĄ čüčéą░ąĮąĄčé 400 ą┤ą╗čÅ ą┐ąŠą▓ąŠčĆąŠčéą░ ąĖą╗ąĖ 800 ą┤ą╗čÅ čĆą░ąĘą▓ąŠčĆąŠčéą░. ąØčā, ąŠą┐čÅčéčī ąČąĄ ąĖąĘ-ąĘą░ ą▓čŗą▒ąĄą│ą░ ą┐čĆąĖčłą╗ąŠčüčī čāą╝ąĄąĮčīčłąĖčéčī ąŠčüąĄčéčĆą░ ąĮą░, čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ, 350 ąĖ 700. ąØąŠ čŹč鹊 č鹊ąČąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ąĮąĄ čüą┐ą░čüą╗ąŠ. ą¤ąŠčüą╗ąĄ ą┐ąŠą▓ąŠčĆąŠčéą░, čĆąŠą▒ąŠčé ąŠą┐čÅčéčī ąŠą▒ąĮą░čĆčāąČąĖą▓ą░ą╗ čāčüą╗ąŠą▓ąĖąĄ ą┤ą╗čÅ ą╝ą░ąĮąĄą▓čĆą░ ąĖ ąĮą░čćąĖąĮą░ą╗ ą║čĆčāčéąĖčéčīčüčÅ čüąĮąŠą▓ą░. ąóąŠą│ą┤ą░, čÅ čĆąĄčłąĖą╗, čćč鹊 ą┐čāčüčéčī čĆąŠą▒ąŠčé ą║ą░ą║ąŠąĄ-č鹊 čĆą░čüčüč鹊čÅąĮąĖąĄ ą┐čĆąŠčģąŠą┤ąĖčé ą▒ąĄąĘ ą┐čĆąŠą▓ąĄčĆą║ąĖ. ąĪą┤ąĄą╗ą░ą╗ čéą░ą║ąŠą╣ ąĘą░čēąĖčéąĮčŗą╣ ąĖąĮč鹥čĆą▓ą░ą╗ - čüčéą░ą╗ąŠ ą╗čāčćčłąĄ. ąæčŗą╗ąĖ ą┐čĆą░ą▓ą┤ą░, ą┐ą░čĆą░ čüą▒ąŠąĄą▓, ą║ąŠą│ą┤ą░ čĆąŠą▒ąŠčé ąŠą▒ąĮą░čĆčāąČąĖą▓ą░ą╗ ą┐ąŠą▓ąŠčĆąŠčé ąĮą░ ą┐čĆčÅą╝ąŠą╝ čāčćą░čüčéą║ąĄ, ąĮąŠ čŹč鹊 ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ą┐ąŠčüą╗ąĄ ą┐ąŠą▓ąŠčĆąŠčéą░ čĆąŠą▒ąŠčé ąĮąĄ čāčüą┐ąĄą▓ą░ą╗ ąĘą░ čüč湥čé ą¤ąśąö ą▓čŗčĆąŠą▓ąĮčÅčéčīčüčÅ ąĮą░ ą╗ąĖąĮąĖąĖ ąĖ čåąĄą┐ą╗čÅą╗ ą╗ąĖąĮąĖčÄ ąŠą┤ąĮąĖą╝ ąĖąĘ ą▒ąŠą║ąŠą▓čŗčģ čüąĄąĮčüąŠčĆąŠą▓. ąØąĄą┐čĆąĖčÅčéąĮčŗą╣ ą╝ąŠą╝ąĄąĮčé ą▓ č鹊ą╝, čćč鹊 čÅ ąĮą░čćą░ą╗ čĆąŠą▒ąŠčéčā ą┐ąĖčüą░čéčī čüąŠąĘą┤ą░ąĮąĖąĄ ą║ą░čĆčéčŗ ą╗ą░ą▒ąĖčĆąĖąĮčéą░. ą¦č鹊 ąŠąĮ čéą░ą╝ ą▓ ą┐ą░ą╝čÅčéčī ą┐ąĖčłąĄčé ąĄčēąĄ ąĮąĄ ą┐čĆąŠą▓ąĄčĆčÅą╗, ąĮąŠ ą▓ ą║ąŠą┤ąĄ ąĄčüčéčī "ą┐ąŠą╝ąĄčéą║ą░" - ąĄčüą╗ąĖ čĆąŠą▒ąŠčé ąŠą║ą░ąČąĄčéčüčÅ ą▓ č鹊ą╝ ąČąĄ ą╝ąĄčüč鹥 ą│ą┤ąĄ čāąČąĄ ą▒čŗą╗ - ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ąŠčüčéą░ąĮąŠą▓ąĖčéčīčüčÅ ąĖ čüąŠčģčĆą░ąĮąĖčéčī ą║ą░čĆčéčā. ąóą░ą║ ą▓ąŠčé, čĆąŠą▒ąŠčé ąĄčēąĄ ąĮąĖ čĆą░ąĘčā ąĮąĄ ąŠčüčéą░ąĮąŠą▓ąĖą╗čüčÅ. ąś čüąĄą╣čćą░čü ą┤čāą╝ą░čÄ, ą║ą░ą║ ąŠčéą╗ą░ąČąĖą▓ą░čéčī čŹč鹊čé ą╝ąŠą╝ąĄąĮčé - ą║ą░ą║ čāąĘąĮą░čéčī ą│ą┤ąĄ čĆąŠą▒ąŠčé čüčćąĖčéą░ąĄčé, čćč鹊 ąĮą░čģąŠą┤ąĖčéčüčÅ.
_________________
ąÉ ą╗čÄą┤ąĖ ą┐ąŠčüą╝ąŠčéčĆčÅčé ąĖ čüą║ą░ąČčāčé: "ąĪąŠą▒ą░ą║ąĖ ą╗ąĄčéčÅčé. ąÆąŠčé ąĖ ąŠčüąĄąĮčī."
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
|
ąĪčéčĆą░ąĮąĖčåą░ 3 ąĖąĘ 14
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 265 ] |
, , , , , ... |
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ |
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: ąĮąĄčé ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ ąĖ ą│ąŠčüčéąĖ: 13 |
|
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ
|

|
|