


| ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé https://radiokot.ru/forum/ |
|
| RSLK ąŠčé TI (Robotic System Learning Kit) https://radiokot.ru/forum/viewtopic.php?f=62&t=161437 |
ąĪčéčĆą░ąĮąĖčåą░ 6 ąĖąĘ 14 |
| ąÉą▓č鹊čĆ: | uldemir [ ą¤ąĮ ą┤ąĄą║ 23, 2019 08:06:29 ] |
| ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: | Re: RSLK ąŠčé TI (Robotic System Learning Kit) |
ąĪ BLE čā ą╝ąĄąĮčÅ ą▓čüčæ ąĮąĖą║ą░ą║ ąĮąĄ čüčĆą░čüčéą░ąĄčéčüčÅ. ąØąĄ ą│ąŠą▓ąŠčĆčÅ čāąČ ąŠ čüąĄčéčÅčģ. ąØą░ čŹčéąĖčģ ą▓čŗčģąŠą┤ąĮčŗčģ ąĖ ą╝ąŠą╣ ąĮąŠą▓čŗą╣ čĆąŠą▒ąŠčé, ą┤čāą╝ą░čÄ, ą▓ą┐ą░ą╗ ą▓ GPF. ąŁč鹊 ą▒čŗą╗ąŠ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ ą║ą░ą║ čÅ ą┐ąŠą┐čŗčéą░ą╗čüčÅ ąĖąĘą▒ą░ą▓ąĖčéčīčüčÅ ąŠčé ą┐ąŠč鹥ąĮčåąĖą░ą╗čīąĮąŠą╣ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┐ąŠą╗čāčćąĖčéčī ą┤ąĄą╗ąĄąĮąĖąĄ ąĮą░ 0 ą▓ ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮąŠ-ąĖąĮč鹥ą│čĆą░ą╗čīąĮąŠą╝ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ. ąØąŠ ą▓ čŹč鹊čé čĆą░ąĘ čÅ ąĖčüą║ą░čéčī ąĮąĖč湥ą│ąŠ ąŠčüąŠą▒ąŠ ą╝ąĄąĮčÅčéčī ąĮąĄ čüčéą░ą╗. ąĪąĮą░čćą░ą╗ą░, ą┐ąŠą┐čŗčéą░ą╗čüčÅ ąŠčéą║ą░čéąĖčéčī ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ, ąĘą░č鹥ą╝, ą║ąŠą│ą┤ą░ ąĮąĖč湥ą│ąŠ ąĮąĄ ąĖąĘą╝ąĄąĮąĖą╗ąŠčüčī, ą┐čĆąŠčüč鹊 čāą▓ąĄą╗ąĖčćąĖą╗ čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ čü 0x200 ą┤ąŠ 0x800. ąŻ ą╝ąĄąĮčÅ čāąČąĄ ą▒čŗą╗ąĖ ą┐ąŠą┤ąŠąĘčĆąĄąĮąĖčÅ ąĮą░ čüč鹥ą║, ąĮąŠ čÅ čāąČąĄ ą▓čüčæ ą║ąŠąĮčüčéą░ąĮčéąĮąŠąĄ, čćč鹊 ą▒čŗą╗ąŠ ą┐ąĄčĆąĄčéą░čēąĖą╗ ą▓ ą¤ąŚąŻ. ąØčā ą▓ąŠ ą▓čüčÅą║ąŠą╝ čüą╗čāčćą░ąĄ, ą┐ąŠčüą╗ąĄ čāą▓ąĄą╗ąĖč湥ąĮąĖčÅ čüč鹥ą║ą░, ą┐ąŠą║ą░ ą│ą╗čÄą║ąŠą▓ ąĮąĄčé. ąŁą║ą╗ąĖą┐čü ąĮą░čüčéčāą┐ą░ąĄčé ą┐ąŠ ą▓čüąĄą╝ čäčĆąŠąĮčéą░ą╝. ąÆąŠčé č鹊ą╗čīą║ąŠ ąĮąĄ ą┐ąŠąĮčÅčéąĮąŠ, 32 ą▒ąĖčéąĮčŗą╣ CCS ąŠčéą╝ąĄąĮąĖą╗ąĖ ąĖąĘ-ąĘą░ 菹║ą╗ąĖą┐čüą░ ąĖą╗ąĖ čéą░ą║? ąØąĄ ą┐ąŠą╗čāčćąĖčéčüčÅ ą╗ąĖ čéą░ą║, čćč鹊 ą╝ąĮąĄ ą▓čüčæ ąČąĄ ą┐čĆąĖą┤čæčéčüčÅ ą┐ąŠą║čāą╝ą░čéčī ąĮąŠą▓čŗą╣ ąĮąŠčāčé, ąĮą░ ą║ąŠč鹊čĆčŗą╣ ąĄą│ąŠ ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé ą┐ąŠčüčéą░ą▓ąĖčéčī. ąÉ č鹊 ą▓ čüčéą░čĆčŗą╣ CCS ąĮąĄ ą╝ąŠą│čā ą┐čĆąŠąĖą╝ą┐ąŠčĆčéąĖčĆąŠą▓ą░čéčī čĆą░ą▒ąŠčćąĖą╣ čüč鹊ą╗ ą┤ą╗čÅ RSLK-MAX. ą×ąĮ čéčĆąĄą▒čāąĄčé ąĮąŠą▓čŗą╣ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ, ą║ąŠč鹊čĆčŗą╣ čÅ ąĮą░ čüčéą░čĆčŗą╣ CCS ąĮąĖą║ą░ą║ ą┐ąŠčüčéą░ą▓ąĖčéčī ąĮąĄ ą╝ąŠą│čā. ąĪ Cypress čÅ ąĖ ą┐čĆąŠą┤ąŠą╗ąČą░čÄ ąĘą░ąĮąĖą╝ą░čéčīčüčÅ. ąĪąĄą╣čćą░čü ąĮą░ą┤ąŠ ą▒čŗ ą▓ąĘčÅčéčīčüčÅ ąĘą░ ąĮąŠą▓ąŠą│ąŠ čĆąŠą▒ąŠčéą░ ą┤ą╗čÅ LineFollower, čćč鹊 čÅ čüąŠą▒čĆą░ą╗ ą▓ ą║ąŠąĮčåąĄ ą╗ąĄčéą░. ąØą░ ą▓čŗčģąŠą┤ąĮčŗčģ ąĘą░ą╗ąĖą╗ č乊čĆą╝čŗ čü ą║ąŠą╗čæčüą░ą╝ąĖ ą┤ą╗čÅ čŹč鹊ą│ąŠ čĆąŠą▒ąŠčéą░ čüąĖą╗ąĖą║ąŠąĮąŠą╝, č湥čĆąĄąĘ ą┐ą░čĆčā ą┤ąĮąĄą╣ ą▒čāą┤čā ą┐čŗčéą░čéčīčüčÅ ąĖčģ ąŠčéčéčāą┤ą░ ą▓čŗą║ąŠą▓čŗčĆąĮčāčéčī. ąóą░ą║ ąČąĄ ą┐ąŠą╗čāčćąĖą╗ č鹊ą╗ą┐čā ąĮąŠą▓čŗčģ ą▒ą░čéą░čĆąĄąĄą║ - ąĮą░ą┤ąŠ ą┐čĆąĖą┤čāą╝ą░čéčī ą║ą░ą║ ąĖčģ ąĘą░ą║čĆąĄą┐ąĖčéčī ąĮą░ čĆąŠą▒ąŠč鹥. ąś, ą║ąŠąĮąĄčćąĮąŠ, ąĮą░ą┤ąŠ ąĮą░čćą░čéčī čĆą░ą▒ąŠčéą░čéčī ąĮą░ą┤ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣, čćč鹊ą▒čŗ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą┐ąŠčģąŠąČąĖą╣ ą¤ąś ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ. ą¤čĆąĖč湥ą╝, ąĄčüą╗ąĖ čÅ čüą┤ąĄą╗ą░ą╗ čéą░čģąŠą╝ąĄčéčĆ ą░ą┐ą┐ą░čĆą░čéąĮąŠ, ą┤ąĄč鹥ą║č鹊čĆ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ - č鹊ąČąĄ ą░ą┐ą┐ą░čĆą░čéąĮąŠ, č鹊 ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ ą┐čĆąĖąŠą┤ą░ č鹊ąČąĄ čģąŠč湥čéčüčÅ čüą┤ąĄą╗ą░čéčī ą░ą┐ą┐ą░čĆą░čéąĮąŠ. |
|
| ąÉą▓č鹊čĆ: | qwertyman6336 [ ą¤ąĮ ą┤ąĄą║ 23, 2019 13:45:07 ] |
| ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: | Re: RSLK ąŠčé TI (Robotic System Learning Kit) |
del |
|
| ąÉą▓č鹊čĆ: | uldemir [ ąĪčĆ ą┤ąĄą║ 25, 2019 22:25:28 ] |
| ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: | Re: RSLK ąŠčé TI (Robotic System Learning Kit) |
ąöą░ ą▓ąŠčé čÅ č鹊ąČąĄ ą┤čāą╝ą░čÄ, ą┐ąŠčĆą░ ąĄą│ąŠ ą╗ąĖą║ą▓ąĖą┤ąĖčĆąŠą▓ą░čéčī ąĖ ąŠą▒ąĮąŠą▓ąĖčéčī ą┐ą░čĆą║ ą║ąŠą╝ą┐čīčÄč鹥čĆąĮąŠą╣ č鹥čģąĮąĖą║ąĖ. ąØčā čÅ ąŠą▒ čŹč鹊ą╝ ą│ąŠą┤ą░ čéčĆąĖ-č湥čéčŗčĆąĄ čāąČąĄ ą┤čāą╝ą░čÄ. ąĪąĄą│ąŠą┤ąĮčÅ "ą┐ąĄčĆąĄčüą░ą┤ąĖą╗" čüąĄąĮčüąŠčĆ ą╗ąĖąĮąĖąĖ ąĮą░ čéčāą┤ą░, ą║čāą┤ą░ ąĘą░ą┤čāą╝ą░ą╗:   ąØą░ą┐ąĄčćą░čéą░ą╗ ą▓ąŠčé čéą░ą║ąŠą╣ čģąŠą╝čāčéąĖą║. ąØą░ą┤ąŠ ą▒čāą┤ąĄčé ąĖąĘ č湥čĆąĮąŠą╣ (čģą╝, ą║ą░ą║ čŹč鹊čé resin ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ ą┐ąŠ-čĆčāčüčüą║ąĖ? ą╗ą░ą┤ąĮąŠ, ą┐čāčüčéčī ą▒čāą┤ąĄčé -) ą│ą╝ą░ąĘąĖ (čģąŠčéčī ąĖ ąĮąĄ ą░čĆą┤čĆąĖčéčüą║ąŠą╣) ąĮą░ą┐ąĄčćą░čéą░čéčī. ą¤čĆą░ą▓ą┤ą░ č湥čĆąĮą░čÅ čā ą╝ąĄąĮčÅ ąŠą▒čŗčćąĮą░čÅ, ą░ ą▓ąŠčé čŹčéą░ čüąĄčĆą░čÅ čüčćąĖčéą░ąĄčéčüčÅ tough (ABS like). ą» čéą░ą║ ą┐ąŠąĮčÅą╗, čćč鹊 ąŠąĮą░ čāą┐čĆčāą│ą░čÅ. ąØčā ą┐ąŠčüą╝ąŠčéčĆąĖą╝. ąĮą░ą┤ąŠąĄčüčé čü čŹč鹊ą╣ ą▓ąŠąĘąĖčéčīčüčÅ - ąĮą░ą╗čīčÄ, ąĮą░ą║ąŠąĮąĄčå, č湥čĆąĮčāčÄ ą▓ ą┐čĆąĖąĮč鹥čĆ. ąŚą░č鹊 č鹥ą┐ąĄčĆčī, čüąĄąĮčüąŠčĆčŗ ąĮą░čģąŠą┤čÅčéčüčÅ ąĮą░ čĆą░čüčüč鹊čÅąĮąĖąĖ 3-4-5 ą╝ą╝ ąŠčé ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéąĖ. ą¤ąŠč湥ą╝čā čĆą░ąĘą▒čĆąŠčü? ąÉ ą┐ąŠč鹊ą╝čā čćč鹊 čłą░čĆąĖą║ čŹč鹊čé ą▓ ą│ąĮąĄąĘą┤ąĄ čŹč鹊ą╝ č鹊ąČąĄ "ą╗čÄčäčéčāąĄčé" ą│ą┤ąĄ-č鹊 čü ą╝ąĖą╗ą╗ąĖą╝ąĄčéčĆ. ąØčā, ą┐ąŠčüą╝ąŠčéčĆąĖą╝, čćč鹊 ą┐ąŠą║ą░ąČčāčé ąĘą░ąĄąĘą┤čŗ ą┐ąŠ čéčĆą░čüčüą░ą╝. ą¤ąŠ ą╝ąŠąĄą╣ čéčĆą░čüčüąĄ čĆąŠą▒ąŠčé ą┐ąŠčłąĄą╗ ą┤ą░ąČąĄ ą▒ąĄąĘ ą┐ąĄčĆąĄąĮą░čüčéčĆąŠą╣ą║ąĖ. čüąĄą╣čćą░čü čüčéą░ą▒ąĖą╗čīąĮąŠ 27.9 čüąĄą║čāąĮą┤čŗ. ąØąĄą╝ąĮąŠą│ąŠ ą┐ąŠą┐čŗčéą░ą╗čüčÅ ą┐ąŠą▒ąŠčĆąŠčéčīčüčÅ čü ą┤ąĄą╗ąĄąĮąĖąĄą╝ ąĮą░ 0. ąĪąĖčéčāą░čåąĖčÅ čéą░ą║ą░čÅ, čćč鹊 ą┤ą╗čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┐ąĄčĆąĖąŠą┤ą░ ą▓čĆą░čēąĄąĮąĖčÅ ą║ąŠą╗ąĄčü, ąĖąĘą╝ąĄčĆčÅąĄčéčüčÅ ąĖąĮč鹥čĆą▓ą░ą╗ ą╝ąĄąČą┤čā ąĖą╝ą┐čāą╗čīčüą░ą╝ąĖ čéą░čģąŠą┤ą░čéčćąĖą║ą░. ąöą╗čÅ čŹč鹊ą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čĆąĄą│ąĖčüčéčĆ ąĘą░čģą▓ą░čéą░ 16 ą▒ąĖčéąĮąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░, ą║ąŠč鹊čĆčŗą╣ ą║čĆčāčéąĖčéčüčÅ ą┐ąŠ ą║čĆčāą│čā. ąó.ąĄ. ąĄčüą╗ąĖ ą┐ąĄčĆą▓ąŠąĄ ąĘą░čģą▓ą░č湥ąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▒čŗą╗ąŠ 0x6000, ą░ ą▓č鹊čĆąŠąĄ 0xE000, č鹊 ą┐ąĄčĆąĖąŠą┤ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ 0x8000. ąĘą░č鹥ą╝ čüą╗ąĄą┤čāčÄčēąĄąĄ 0x7000 - č鹊 ą┐ąŠ 16 ą▒ąĖčéąĮąŠą╣ ą▒ąĄąĘ ąĘąĮą░ą║ąŠą▓ąŠą╣ ą░čĆąĖčäą╝ąĄčéąĖą║ąĄ ą▓čüčæ-čĆą░ą▓ąĮąŠ ą▒čāą┤ąĄčé 0x9000 (7000-E000=FFFF9000, ąĄčüą╗ąĖ ą▓ 32 ą▒ąĖčéą░čģ). ąó.ąĄ. ą▓čüčæ ą║čĆą░čüąĖą▓ąŠ. ąĮąŠ ą┤ąŠ č鹥čģ ą┐ąŠčĆ ą┐ąŠą║ą░ ąĖąĘą╝ąĄčĆąĄąĮąĮčŗą╣ ąĖąĮč鹥čĆą▓ą░ą╗ ąĮąĄ čüčéą░ąĮąŠą▓ąĖčéčüčÅ čĆą░ą▓ąĮčŗą╝ 65536 - ą┐ąŠč鹊ą╝čā ą║ą░ą║ čĆą░ąĘąĮąŠčüčéčī ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ čĆą░ą▓ąĮąŠą╣ 0. ąś č鹊ą│ą┤ą░ ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ RPM ą┐čĆąĖčģąŠą┤ąĖčéčüčÅ ą┤ąĄą╗ąĖčéčī ąĮą░ čŹč鹊čé 0. ąś čéčāčé čÅ ą┐ąŠą┤čāą╝ą░ą╗, čéą░ą║ ą║ą░ą║ čÅ ą║ąŠąĮčéčĆąŠą╗ąĖčĆčāčÄ čćąĖčüą╗ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖą╣ čéą░ą╣ą╝ąĄčĆą░ (ąĄčüą╗ąĖ ą╝ąĄąČą┤čā ą┤ą▓čāą╝čÅ čüąŠą▒čŗčéąĖčÅą╝ąĖ ąĘą░čģą▓ą░čéą░ čéą░ą╣ą╝ąĄčĆ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĖą╗čüčÅ ą▒ąŠą╗ąĄąĄ ąŠą┤ąĮąŠą│ąŠ čĆą░ąĘą░, č鹊 čÅ čüčćąĖčéą░čÄ, čćč鹊 ą╝čŗ čüč鹊ąĖą╝ ąĮą░ ą╝ąĄčüč鹥), č鹊 ą┐ąŠč湥ą╝čā ą▒čŗ čüčćąĖčéą░čéčī ąĮąĄ ą▓ 16 ą▒ąĖčéąĮąŠą╣ ą░čĆąĖčäą╝ąĄčéąĖą║ąĄ, ą░ ą▓ 17 ą▒ąĖčéąĮąŠą╣. ąæčŗą╗ąĖ čéčĆąĖ ą┐ąŠą┐čŗčéą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą▓ąŠą┤ąĖą╗ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą║ ą┐ąŠčćčéąĖ ą┐ąŠą╗ąĮąŠą╣ ąĮąĄčĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ, ąĮąŠ ą║ąŠą│ą┤ą░ čÅ čĆą░ąĘąŠą▒čĆą░ą╗čüčÅ čüąŠ ą▓čüąĄą╝ąĖ ąŠčłąĖą▒ą║ą░ą╝ąĖ - čŹčéą░ čłčéčāą║ą░ ąĘą░čĆą░ą▒ąŠčéą░ą╗ą░. ąÆąŠčé čŹč鹊čé ą║ąŠą┤ ąĖąĘ ą╗ą░ą▒ąŠčĆą░č鹊čĆąĮčŗčģ čĆą░ą▒ąŠčé (ąŠąĮ čéą░ą╝ ą▒čŗą╗ čāąČąĄ ą│ąŠč鹊ą▓čŗą╣) ąÜąŠą┤: void tachometerRightInt(uint16_t currenttime){ ąÉ čÅ ą┤ąŠą▒ą░ą▓ąĖą╗ ąĄčēąĄ ąŠą┤ąĖąĮ ą▒ąĖčé:Tachometer_FirstRightTime = Tachometer_SecondRightTime; Tachometer_SecondRightTime = currenttime; ąÜąŠą┤: void tachometerRightInt(uint16_t currenttime){ čé.ąĄ. čā ą╝ąĄąĮčÅ ą▓čüąĄą│ą┤ą░ SecondRightTime ą▒ąŠą╗čīčłąĄ č湥ą╝ FirstRightTime. ąØčā ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ čüąĖčéčāą░čåąĖąĖ, ą║ąŠą│ą┤ą░ čéą░ą╣ą╝ąĄčĆ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĖą╗čüčÅ ą▒ąŠą╗čīčłąĄ ąŠą┤ąĮąŠą│ąŠ čĆą░ąĘą░, ąĮąŠ č鹊ą│ą┤ą░ čÅ ąĖ ąĖąĮč鹥čĆą▓ą░ą╗ ą▓ąŠąŠą▒čēąĄ ąĮąĄ čüčćąĖčéą░čÄ, ą░ ą▓ąŠąĘą▓čĆą░čēą░čÄ 65535 ąĖ čüčéą░čéčāčü STOPPED. ąÉ, ąĖ ą┤ą╗čÅ čŹč鹊ą│ąŠ čäąĖąĮčéą░, ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ąĖąĘ 16 ą▒ąĖčéąĮčŗčģ čüą┤ąĄą╗ą░ą╗ 32 ą▒ąĖčéąĮčŗą╝ąĖ (ąŠ, čÅ č鹥ą┐ąĄčĆčī ą╝ąŠą│čā čéą░ą╝ ą▒ąŠą╗čīčłąĄąĄ čćąĖčüą╗ąŠ ą▓ąŠąĘą▓čĆą░čēą░čéčī ą▓ą╝ąĄčüč鹊 65535! čüąĄą╣čćą░čü ą┐ąŠą┐čĆąŠą▒čāąĄą╝) .Tachometer_FirstRightTime = Tachometer_SecondRightTime & 0xFFFF; Tachometer_SecondRightTime = currenttime + ((RollOverRight) ? 0x10000 : 0); ąØą░ą┤čāą╝ą░ą╗, ąĄčēąĄ čĆą░ąĘąŠą║ ą┐ąŠą│čāą│ą╗ąĖčéčī, ą╝ąŠąČąĄčé ą│ą┤ąĄ ą▓ ąĖąĮč鹥čĆąĮąĄč鹥 ąĄčüčéčī čĆąĄčłąĄąĮąĖąĄ čŹč鹊ą│ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąĢčüč鹥čüčéą▓ąĄąĮąĮąŠ, ąĮąĖč湥ą│ąŠ ąĮąĄ ąĮą░čłąĄą╗, ąĘą░č鹊 ąĮą░čłąĄą╗ ą║ą░ą║čāčÄ-č鹊 ą┐čĆąĄąĘąĄąĮčéą░čåąĖčÄ ąŠčé ąöą░ąĮąĖ菹╗ą░ ąÆą░ą╗ą▓ą░ąĮąŠ ąĖ čüčüčŗą╗ą║čā ą│ą┤ąĄ ą┤ą╗čÅ čŹč鹊ą│ąŠ čĆąŠą▒ąŠčéą░ ą┐čĆąĖą▓ąĄą┤ąĄąĮą░ ą░ąĮą┤čĆąŠąĖą┤ąĮą░čÅ ą░ą┐ą┐ą╗ąĖą║ą░čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ čāą┐čĆą░ą▓ą╗čÅąĄčé čĆąŠą▒ąŠč鹊ą╝ č湥čĆąĄąĘ BLE. ąÆ čĆąŠą▒ąŠčé ąĮą░ą┤ąŠ ąĘą░ą│čĆčāąĘąĖčéčī ą┐čĆąŠąĄą║čé, ą║ąŠč鹊čĆčŗą╣ ąĄčüčéčī ą▓ ą╗ą░ą▒ąŠčĆą░č鹊čĆąĮąŠą╝ ą▓ąŠčĆą║ą┐ą╗ąĄą╣čüąĄ ą┐ąŠą┤ ąĮą░ąĘą▓ą░ąĮąĖąĄą╝ ASEE. ąöčāą╝ą░ą╗, ą░ ąĮąĄ ąĘą░ą│čĆčāąĘąĖčéčī ą╗ąĖ ą▓ čĆąŠą▒ąŠčé ąĄčæ ąĮą░ ą┐ąŠą▒ą░ą╗ąŠą▓ą░čéčīčüčÅ? ąōą╗ą░ą▓ąĮąŠąĄ ąĮąĄ ąĘą░ą▒čŗčéčī čüą╗ąĖčéčī č鹥ą║čāčēąĖą╣ ąĖą╝ąĖą┤ąČ ą┐ą░ą╝čÅčéąĖ, ą░ č鹊, ą┐čŗčéą░čÅčüčī ą┤ąĄą╗ą░čéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ ą╗ą░ą▒čŗ - čüčéčæčĆ ą▓čüčÄ ą┐ą░ą╝čÅčéčī ą▓ą╝ąĄčüč鹥 čü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ. ąśą╗ąĖ ąĮą░ą┤ąŠ ąĖčģ ą│ą┤ąĄ-č鹊 ąĘą░ą┐ąĖčüą░čéčī. ąØąŠ ą┤ą╗čÅ ąĮą░čćą░ą╗ą░ ą┐ąŠą┐čŗčéą░ą╗čüčÅ ąĘą░ą╗ąĖčéčī ą┐čĆąŠą│čĆą░ą╝ą╝čā ą▓ ą┐ą╗ą░ąĮčłąĄčé. ąĀą░ąĘčāą╝ąĄąĄčéčüčÅ, ąĮąĖč湥ą│ąŠ ąĮąĄ ą▓čŗčłą╗ąŠ. ąĪą║ąŠą┐ąĖčĆąŠą▓ą░ą╗ *.apk ąĮą░ ą┐ą╗ą░ąĮčłąĄčé, čĆą░ąĘčĆąĄčłąĖą╗ čāčüčéą░ąĮąŠą▓ą║čā "ą╗ąĄą▓čŗčģ" ą░ą┐ą┐ą╗ąĖą║ą░čåąĖą╣, ąĮą░ąČą░ą╗ - čāčüčéą░ąĮąŠą▓ąĖčéčī... ąŠąĮąŠ č湥čĆąĄąĘ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą▓čĆąĄą╝čÅ ą▓čŗą┤ą░ą╗ąŠ, čćč鹊 installation failed. ąÆąŠąŠą▒čēąĄ-č鹊 ą┤ą╗čÅ čŹč鹊ą╣ apk ąĄčüčéčī ąĖčüčģąŠą┤ąĮąĖą║ąĖ ą┐ąŠą┤ android studio, ąĮąŠ čÅ ą▓ ąĮąĖčģ ą║ą░ą║ čüą▓ąĖąĮčīčÅ ą▓ ą░ą┐ąĄą╗čīčüąĖąĮą░čģ. ąś ą┐ąŠą┤čāą╝ą░ą╗ąŠčüčī ą╝ąĮąĄ, čćč鹊 ąĮą░ą┤ąŠ ą▒čŗ ą┐ąŠą┐čŗčéą░čéčīčüčÅ ąĘą░ą┐ąŠą╗ąĮąĖčéčī čŹč鹊čé ą┐čĆąŠą▒ąĄą╗. ąØą░čćą░ą╗ čĆčŗčéčī ąĖąĮč鹥čĆąĮąĄčé ąĖ ąĮą░čĆčŗą╗ processing. ąĪąĮą░čćą░ą╗ą░ ą┐ąŠą┤čāą╝ą░ą╗, čćč鹊 ą┐ąŠčģąŠąČąĄ ąĮą░ ą░čĆą┤čāąĖąĮčā. ą×ą║ą░ąĘą░ą╗ąŠčüčī - ąĮą░ąŠą▒ąŠčĆąŠčé! ąŁč鹊 ą░čĆą┤čāąĖąĮą░ ą┐ąŠčģąŠąČą░ ąĮą░ processing, čéą░ą║ ą║ą░ą║ čüą┤ąĄą╗ą░ąĮą░ ąĮą░ ąĄą│ąŠ ąŠčüąĮąŠą▓ąĄ. ąÆč湥čĆą░ ą▓ąĄčüčī ą┤ąĄąĮčī ąĘą░ąĮąĖą╝ą░ą╗čüčÅ "ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĄą╣". ąÆąŠą▒čēąĄčé, ą┐čĆąŠčåąĄčüčüąĖąĮą│ ąĖąĮčüčéą░ą╗ąĖčĆąŠą▓ą░čéčī ąĮąĄ ąĮčāąČąĮąŠ - čĆą░čüą┐ą░ą║ąŠą▓ą░ą╗ ą║čāą┤ą░-ąĮąĖą▒čāą┤čī ąĖ ą┐čĆąŠčüč鹊 ąĘą░ą┐čāčüčéąĖą╗ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ čäą░ą╣ą╗. ąØąŠ ą┤ą╗čÅ č鹊ą│ąŠ čćč鹊ą▒čŗ ą┤ąĄą╗ą░čéčī ą░ą┐ą┐ą╗ąĖą║ą░čåąĖąĖ ąĮą░ ą░ąĮą┤čĆąŠąĖą┤, ąĮą░ą┤ąŠ ą┐ąŠčüčéą░ą▓ąĖčéčī čĆą░ąĘąĮčŗąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ąĖ USB ą┤čĆą░ą╣ą▓ąĄčĆą░, čćč鹊ą▒čŗ čā ą┐ą╗ą░ąĮčłąĄčéą░ ą▒čŗą╗ ą┤ąŠčüčéčāą┐ąĄąĮ USB-debug. ąĪ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╝ ą┐čĆąĖčłą╗ąŠčüčī ą┐ąŠą▓ąŠąĘąĖčéčīčüčÅ, ąĮąŠ čüąŠ ą▓č鹊čĆąŠą╣ ą┐ąŠą┐čŗčéą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆ ą┐ąŠčüčéą░ą▓ąĖčéčī ą▓čüčæ ąČąĄ čāą┤ą░ą╗ąŠčüčī. ąóąĄą┐ąĄčĆčī ą┐ąŠčćąĖčéčŗą▓ą░čÄ ą║ąĮąĖąČą║čā ąĖ ą┐čŗčéą░čÄčüčī ą┐ąŠ ąĮąĄą╣ ą┤ąĄą╗ą░čéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą╝ąĄčĆčŗ. ąĀąĖčüąŠą▓ą░čéčī ą║čĆčāą│ąĖ ąĖ ą║ą▓ą░ą┤čĆą░čéčŗ ąĮą░ 菹║čĆą░ąĮąĄ čāąČąĄ ąĮą░čāčćąĖą╗čüčÅ. ąś ą┤ą░ąČąĄ ą┤ą▓ąĖą│ą░čéčī ąĖ ą┐ąĄčĆąĄą║čĆą░čłąĖą▓ą░čéčī ąĖčģ. ąØą░ą┤ąĄčÄčüčī, ą║ąŠą│ą┤ą░ ą┤ąŠą╣ą┤čā ą┤ąŠ čüąĄą┤čīą╝ąŠą╣ ą│ą╗ą░ą▓čŗ ą┐čĆąŠ BT čüą▓čÅąĘčī čÅ ąĮąĄ čĆą░ąĘąŠčćą░čĆčāčÄčüčī. ąś ąĄčēąĄ ą┤ąŠ čŹč鹊ą│ąŠ ąĮą░ą╣ą┤čā, ą║ą░ą║ ą╝ąŠąČąĮąŠ čüą┤ąĄą╗ą░čéčī čāą┤ąŠą▒ąĮčŗą╣ ą▓ą▓ąŠą┤ ąĘąĮą░č湥ąĮąĖą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 5 minutes: p.s. ąÉčĆą┤čĆąĖčéčüą║ą░čÅ ą│ą╝ą░ąĘčī, ą┤ą╗čÅ č鹥čģ ą║č鹊 ąĮąĄ ąĘąĮą░ąĄčé ąĖą╗ąĖ čāąČąĄ ąĮąĄ ą┐ąŠą╝ąĮąĖčé - ąĪčéą░ąĮąĖčüą╗ą░ą▓ ąøąĄą╝. ąŚą▓čæąĘą┤ąĮčŗąĄ ą┤ąĮąĄą▓ąĮąĖą║ąĖ ąÖąŠąĮą░ ąóąĖčģąŠą│ąŠ. ąóą░ą╝ ąĖąĘ ąĮąĄčæ ą▓čüčæ ą┤ąĄą╗ą░ą╗ąĖ, ąĮą░čćąĖąĮą░čÅ ąŠčé ąŠą┐ąĄčĆąĮąŠą│ąŠ č鹥ą░čéčĆą░, čĆą░ąĘčĆčāčłąĄąĮąĮąŠą│ąŠ ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐ą░ą┤ąĄąĮąĖčÅ ą╝ąĄč鹥ąŠčĆąĖčéą░, ą┤ąŠ... ą▓ą┐čĆąŠč湥ą╝, ą║č鹊 ąĮąĄ čćąĖčéą░ą╗ , ą┐ąŠčćąĖčéą░ą╣č鹥 čüą░ą╝ąĖ. ąĪ č鹊čćą║ąĖ ąĘčĆąĄąĮąĖčÅ čüąŠą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ č湥ą╗ąŠą▓ąĄą║ą░, čÅą▓ąĮąŠ ą║ą░ą║ąŠą╣-č鹊 čĆą░čüčģąŠą┤ąĮąĖą║ ą┤ą╗čÅ 3D ą┐ąĄčćą░čéąĖ. :)) |
|
| ąÉą▓č鹊čĆ: | Ser60 [ ą¦čé ą┤ąĄą║ 26, 2019 22:38:36 ] |
| ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: | Re: RSLK ąŠčé TI (Robotic System Learning Kit) |
ą¤ąŠčģąŠąČąĄ, ąÆčŗ čĆąĄčłąĖą╗ąĖ čüčĆą░ąĘčā 2 ą┐čĆąŠą▒ą╗ąĄą╝čŗ ą╝ą░čģąŠą╝. ąØą░čüčćčæčé ASEE - čŹč鹊 ą║ą░ą║ čĆą░ąĘ ą│ą┤ąĄ čÅ čü ąÆą░ą╗čīą▓ą░ąĮąŠ ą┐ąŠąĘąĮą░ą║ąŠą╝ąĖą╗čüčÅ, ąŠą┤ąĮą░ą║ąŠ ąĮą░ čŹč鹊ą╣ ąĄą│ąŠ ą┐čĆąĄąĘąĄąĮčéą░čåąĖąĖ čÅ ąĮąĄ ą▒čŗą╗. ąźąŠčéčÅ, ą┐čĆąŠą▓ąŠą┤čÅčéčüčÅ čŹčéąĖ ą║ąŠąĮč乥čĆąĄąĮčåąĖąĖ ą║ą░ąČą┤čŗą╣ ą│ąŠą┤, ą╝ąŠąČąĄčé čŹčéą░ ąĖ ąĮąĄ čéą░. ąØąĄ ąĘąĮą░čÄ ą┐ąŠąĄą┤čā-ą╗ąĖ ąĮą░ ąĮąĖčģ ąĄčēčæ. ą×ą┤ąĮą░ čĆąĄą│ąĖčüčéčĆą░čåąĖčÅ ą┐ąŠčĆčÅą┤ą║ą░ 1000 čüč鹊ąĖą╗ą░, ąÆ č鹊čé čĆą░ąĘ ąóąś ą▒čŗą╗ ą░ą║čéąĖą▓ąĮąŠ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮ, ąĮą░ čüą╗ąĄą┤. ą│ąŠą┤ čāąČąĄ ST. ąÉ ą┐ąŠč湥ą╝čā čĆąĄčłąĖą╗ąĖ ąĮą░ Processing ą┐ąĖčüą░čéčī, ą░ ąĮąĄ ąĮą░ Java? ąźąŠčéčÅ, ą┤ą╗čÅ Androida čüąĄą╣čćą░čü ą▒ąŠą╗ąĄąĄ ą░ą║čéčāą░ą╗ąĄąĮ Kotlin, ą▓čĆąŠą┤ąĄ ą┐ą╗ą░ąĮąĖčĆčāčÄčé ą▓čüčÄ čĆą░ąĘčĆą░ą▒ąŠčéą║čā ą┐ąŠą┤ ąÉąĮą┤čĆąŠąĖą┤ ąĮą░ ąĮąĄą│ąŠ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ čü Java. |
|
| ąÉą▓č鹊čĆ: | uldemir [ ąÆčü ą┤ąĄą║ 29, 2019 23:16:15 ] |
| ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: | Re: RSLK ąŠčé TI (Robotic System Learning Kit) |
ąŚą░ąĖąĮč鹥čĆąĄčüąŠą▓ą░ą╗čüčÅ PSoC6. ąÜą░čĆčéąĖąĮą║ą░ ąĖąĮč鹥čĆąĄčüąĮą░čÅ - ą┤ą▓ą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą▓ ąŠą┤ąĮąŠą╝ ą║ąŠčĆą┐čāčüąĄ?! ą¤čĆą░ą▓ą┤ą░, ąĮąĄ ą┐ąŠąĮčÅą╗ ąĖą╗ąĖ ąĮąĄ ąĘą░ą╝ąĄčéąĖą╗ ąĖąĘ-ąĘą░ ą▒ąĄą│ą╗ąŠą│ąŠ ą┐čĆąŠčüą╝ąŠčéčĆą░, UDP ą▓ ąĮąĖčģ ąĮąĄčé? ąØčā, čćč鹊ą▒čŗ čāą│ą╗čāą▒ąĖčéčīčüčÅ čüą╗ąĄą│ą║ą░, ą▒čĆąŠčüąĖą╗ ą▓ ą║ąŠčƹʹĖąĮą║čā Cy8Cproto-062 ą┐ą╗ą░čéą║čā - ą┐ąŠčüą╝ąŠčéčĆąĖą╝ čćč鹊 čéą░ą║ąŠąĄ. ąóą░ą╝ ąĄčēąĄ ą║ą░ą║ąŠą╣-č鹊 ą╝ąĖą║čĆąŠą╝ąŠą┤čāą╗čī ąĮą░ ą▒ąŠčĆčéčā BLE ąĖ WiFi čĆą░ąĘąŠą╝? ąØąĄ ąĘąĮą░čÄ, čüąĄą╣čćą░čü ąĘą░ą║ą░ąĘą░čéčī ąĖą╗ąĖ ą┐ąŠčüą╗ąĄ ąØąō. ąÆčüčæ-čĆą░ą▓ąĮąŠ ą┐čĆąĖą┤čæčé č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ ąØąō. ąÆ ąŠą┐ąĖčüą░ąĮąĖąĖ čāą┐ąŠą╝ąĖąĮą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą£ąŠą┤čāčü. ąóą░ą╝ ą▓ ą║ąŠčƹʹĖąĮą║ąĄ ąĮą░ą║ąĖą┤ą░ą╗ ąĮąĄą╝ąĮąŠą│ąŠ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░ čĆą░ąĘąĮąŠą│ąŠ. ąÜąŠąĮčüčéą░čéąĖčĆąŠą▓ą░ą╗, čćč鹊 ą┤ąŠą╝ą░ ąĮąĄčé ąĮąĖ ąŠą┤ąĮąŠą│ąŠ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą│ąŠ ą╝ąĄčéčćąĖą║ą░ ą£3. ąóąŠ čćč鹊 čā ąĮą░čü ą▓ čüčéčĆąŠąĖč鹥ą╗čīąĮąŠą╝ ą┐čĆąŠą┤ą░čÄčé - čéą░ą║ąŠąĄ ą▒ą░čĆą░čģą╗ąŠ. ąØčā ąĖ ąĘą░ čĆą░ąĘ ą▒čĆąŠčüąĖą╗ ą╝ą░ą╗ąĄąĮčīą║ąĖą╣ ą║ąŠąĮąĮąĄą║č鹊čĆ - ąĮą░ą┤ąĄčÄčüčī, ą┐ąŠą┤ąŠą╣ą┤čæčé ą║ą░ą║ ąŠčéą▓ąĄčéąĮą░čÅ čćą░čüčéčī ą║ LiFe ą░ą║ą║čāą╝čāą╗čÅč鹊čĆą░ą╝, čćč鹊 čÅ ąĘą░ą║čāą┐ąĖą╗. ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ą╗ą░ąĮąĖčĆčāčÄ ą┐ąŠčüčéą░ą▓ąĖčéčī ąĮą░ čĆąŠą▒ąŠčéą░ ą┤ą╗čÅ LineFollower. ąÜąŠą╗čæčüą░ ą┤ą╗čÅ čŹč鹊ą│ąŠ čĆąŠą▒ąŠčéą░ ąŠčéą╗ąĖą╗ ąĖ ą┤ą░ąČąĄ ą▒ą╗ą░ą│ąŠą┐ąŠą╗čāčćąĮąŠ ą▓čŗčéą░čēąĖą╗ ąĖąĘ č乊čĆą╝čŗ. ąÆčĆąŠą┤ąĄ, čāąČąĄ ąĮą░ą╗ąŠą▓čćąĖą╗čüčÅ, čü ą║ą░ą║ąŠą╣ čüč鹊čĆąŠąĮčŗ ąĮą░ą┤ą░ą▓ąĖčéčī, čćč鹊ą▒čŗ ąŠč鹊賹Ąą╗ ąŠčé čüč鹥ąĮąŠą║ ąĖ ą▓ ą║ą░ą║čāčÄ čüč鹊čĆąŠąĮčā ąŠąĮ ą╗ąĄą│č湥 ą▓čŗą┤ą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąĖąĘ č乊čĆą╝čŗ. ąöčāą╝ą░ą╗-ą┤čāą╝ą░ą╗, ą┐ąŠč湥ą╝čā "čéčĆčæčģą║ąŠąĮčéčāčĆąĮą░čÅ" čüąĖčüč鹥ą╝ą░ čĆą░ą▒ąŠčéą░ąĄčé ą╗čāčćčłąĄ č湥ą╝ ąŠą▒čēą░čÅ ąŠą┤ąĮąŠą║ąŠąĮčéčāčĆąĮą░čÅ čüąĖčüč鹥ą╝ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąÆčĆąŠą┤ąĄ, ą▓čüčæ ą┐ąŠčćčéąĖ ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠ - ąĄčüčéčī ąŠčłąĖą▒ą║ą░, ąŠąĮą░ čāčüąĖą╗ąĖą▓ą░ąĄčéčüčÅ ąĖ ą┐ąŠą┤ą░čæčéčüčÅ ąĮą░ ąĖčüą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░. ąØąŠ ą┤ąĄą╗ąŠ ą▓ č鹊ą╝, ą┐ąŠ ą╝ąŠąĄą╝čā, čćč鹊 ą▓čĆąĄą╝čÅ čĆąĄą░ą║čåąĖąĖ ą▓čüąĄą│ąŠ čĆąŠą▒ąŠčéą░, ą│ąŠčĆą░ąĘą┤ąŠ ą▓čŗčłąĄ č湥ą╝ ą▓čĆąĄą╝čÅ čĆąĄą░ą║čåąĖąĖ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ. ąś čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī čéą░ą║ąŠąĄ ąČąĄ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄąĄ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖąĄ ą▓ ąŠą▒čēąĄą╣ čüąĖčüč鹥ą╝ąĄ - ąĮą░ą┤ąŠ ąŠč湥ąĮčī ą┐ąŠą▓čŗčüąĖčéčī ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé čāčüąĖą╗ąĄąĮąĖčÅ čāčüąĖą╗ąĖč鹥ą╗čÅ ąŠčłąĖą▒ą║ąĖ, čćč鹊 ą┐čĆąĖ ą▒ąŠą╗čīčłąŠą╝ ąĘą░ą┐ą░ąĘą┤čŗą▓ą░ąĮąĖąĖ ą▓čŗąĘčŗą▓ą░ąĄčé ąĮąĄčüčéą░ą▒ąĖą╗čīąĮąŠčüčéčī čüąĖčüč鹥ą╝čŗ (ą▓ąŠąĘą▒čāąČą┤ąĄąĮąĖąĄ). ąÉ ą▓ čéčĆčæčģą║ąŠąĮčéčāčĆąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ, čŹčéąĖ čŹčéą░ą┐čŗ čāčüąĖą╗ąĄąĮąĖčÅ čĆą░ąĘą┤ąĄą╗ąĄąĮčŗ čéą░ą║, čćč鹊 čüčāą╝ą╝ą░čĆąĮčŗą╣ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé (ą╝ąĮąĄ ą║ą░ąČąĄčéčüčÅ, ąŠąĮ čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖąĄą╝ čŹčéąĖčģ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą▓) ą┤ąŠčüčéą░č鹊čćąĮąŠ ą▓čŗčüąŠą║, ąĮąŠ ą▓ č鹊ąČąĄ ą▓čĆąĄą╝čÅ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ ąŠąĮ ą┤ąŠčüčéą░č鹊čćąĮąŠ ąĮąĖąĘąŠą║, čćč鹊ą▒čŗ ą┐čĆąĖ č鹊ą╝ ą▓čĆąĄą╝ąĄąĮąĖ čĆąĄą░ą║čåąĖąĖ ą║ą░čüą║ą░ą┤ą░ ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓čüčæ ąĄčēąĄ čüčéą░ą▒ąĖą╗čīąĮčŗą╝. ąØą░ą▓ąĄčĆąĮąŠąĄ, ąĮą░ą┐ąĖčüą░ą╗ ą┐čĆąŠą┐ąĖčüąĮčŗąĄ ąĖčüčéąĖąĮčŗ, ą║ąŠč鹊čĆčŗąĄ čāčćą░čé ąĮą░ 3 ą║čāčĆčüąĄ čüčéčāą┤ąĄąĮč鹊ą▓... ąÜčĆąĖč鹥čĆąĖąĖ ąØą░ą╣ą║ą▓ąĖčüčéą░ ąĖčéą┤. ąó.ąĄ. ą║ą╗ą░čüčüąĖą║ą░ č鹥ąŠčĆąĖąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ. ąØąŠ čćč鹊 ą┤ąĄą╗ą░čéčī, ąĄčüą╗ąĖ čÅ č鹊ą╗čīą║ąŠ čüąĄą╣čćą░čü ą┤ąŠčĆąŠčü ą┤ąŠ ąĮąĄčæ? ąś čŹč鹊 ą╝ąĄąĮčÅ ą▓ą┤ąŠčģąĮąŠą▓ą╗čÅąĄčé - ąĄčüčéčī ąĮą░ą┤ąĄąČą┤ą░, čćč鹊 čĆąŠą▒ąŠčé ą▒ąĄą│čāčēąĖą╣ ą┐ąŠ ą╗ąĖąĮąĖąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĄčēąĄ ą▒čŗčüčéčĆąĄąĄ. ąØą░ čĆą░ą┤ąŠčüčéčÅčģ, ąŠčé č鹊ą│ąŠ, čćč鹊 RSLK-MAX ą┐ąŠ čüą▓ąŠąĖą╝ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ čüčĆą░ą▓ąĮčÅą╗čüčÅ čü ą║ą╗ą░čüčüąĖč湥čüą║ąĖą╝ RSLK, ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ čÅ čĆą░ąĘąŠą▒čĆą░ą╗ ąĖ čéą░čĆą│ąĄčé ąĖąĘ ą┐čĆąŠąĄą║čéą░ čāą┤ą░ą╗ąĖą╗. ąØą░ ą▒ą░ąĘąĄ čŹč鹊ą│ąŠ čłą░čüčüąĖ čģąŠčćčā čüą┤ąĄą╗ą░čéčī ą┤čĆčāą│ąŠą│ąŠ čĆąŠą▒ąŠčéą░. ąæąĄą│čāčēąĄą│ąŠ ą┐ąŠ ą╗ąĖąĮąĖąĖ čü TSL1401CL ą¤ąŚąĪ ą╗ąĖąĮąĄą╣ą║ąŠą╣, ą║ąŠč鹊čĆčāčÄ ą┐ąŠą╗-ą│ąŠą┤ą░ ąĮą░ąĘą░ą┤ ą▓čŗ ą┐ąŠčĆąĄą║ąŠą╝ąĄąĮą┤ąŠą▓ą░ą╗ąĖ. ąĪčéčĆąŠąĖčéčī ą┐ą╗ą░ąĮąĖčĆčāčÄ ąĮą░ PSoC5. ąöą░ ą▓ąŠčé č鹊ą╗čīą║ąŠ ą┐ąŠą║čĆčāčéąĖą╗ ą╝ą░ą║ąĄčéą║čā, ą┤ą░ čéą░ą║ ąĖ ąĮąĄ ąĮą░čłąĄą╗, ą║čāą┤ą░ ąĄčæ ąĮą░ čŹč鹊 čłą░čüčüąĖ ą┐čĆąĖą║čĆčāčéąĖčéčī. ąŁčéąĖ ą▓čŗčģąŠą┤ąĮčŗąĄ čü ąÉąĮą┤čĆąŠąĖą┤ąŠą╝ ą┐čĆąŠą╗ąĄąĮąĖą╗čüčÅ - ąĮąĖč湥ą│ąŠ ąĮąĄ ąĖąĘčāčćą░ą╗. ą¤ąŠč湥ą╝čā Process? ą¤ąŠč鹊ą╝čā, čćč鹊 čüą╗ąŠą▓ą░ ąÜąŠčéą╗ąĖąĮ, ąöąČą░ą▓ą░ - ą┤ą╗čÅ ą╝ąĄąĮčÅ čćčāąČąĖąĄ. ąś čÅ ą┐čĆąŠčüč鹊 ą┐ąŠąĮą░ą┤ąĄčÅą╗čüčÅ, čćč鹊 čģąŠčéčÅ ą▒čŗ ąŠą▒čēąĖąĄ ą┐čĆąĖąĮčåąĖą┐čŗ ąĮą░čćąĮčā ą┐ąŠąĮąĖą╝ą░čéčī, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą▒čŗ ą┐ąĄčĆąĄą╣čéąĖ ą║ AndroidStudio. ąŁčéąĖ ą▒čāą║ą▓čŗ ASEE ąĮą░čłąĄą╗ ąĮą░ ą┤ąŠą╝ą░čłąĮąĄą╣ čüčéčĆą░ąĮąĖčćą║ąĄ ąÆą░ą╗ą▓ą░ąĮąŠ http://users.ece.utexas.edu/~valvano/ ąś ą▓ąŠčé čŹčéą░ ą░ą┐ą┐ą╗ąĖą║ą░čåąĖčÅ - čŹč鹊 ASEE 2018 ą│ąŠą┤ą░. ąÆ čüą░ą╝ąŠą╣ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ čćą░čüčéąĖ čüčéčĆą░ąĮąĖčåčŗ ąĮą░ ą│ąŠą╗čāą▒ąĄąĮčīą║ąŠą╝ č乊ąĮąĄ. ąÆ CSSąŠą▓čüą║ąŠą╝ ą▓ąŠčĆą║ą┐ą╗ąĄą╣čüąĄ ąĖčüčģąŠą┤ąĮąŠą│ąŠ č鹥ą║čüčéą░ ą┐čĆąŠąĄą║čéą░ ASEE ąĮąĄčé - ąŠą┤ąĮąĖ č鹊ą╗čīą║ąŠ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ .obj čäą░ą╣ą╗čŗ ąĖ main.c. ąØčā ąĮąĖč湥ą│ąŠ, ą╝ąŠąČąĄčé čüąŠ ą▓čĆąĄą╝ąĄąĮąĄą╝ čüąŠąĘčĆąĄčÄ ą┐ąŠą║ąŠą▓čŗčĆčÅčéčī ąĖ čŹčéčā ą░ą┐ą┐ą╗ąĖą║ą░čåąĖčÄ. ą¤ąĄčĆąĄą║ą╗ąĄąĖą╗ čéčĆą░čüčüčā ą╗ą░ą▒ąĖčĆąĖąĮčéą░. ąś č鹥ą┐ąĄčĆčī, čćčāą▓čüčéą▓čāčÄ, čćč鹊 ąĮą░ą┤ąŠ ą▒čŗ ą┤ą╗čÅ ą┐ąŠą╗ąĮąŠą│ąŠ ą║ąŠą╝ą┐ą╗ąĄą║čéą░ (ą┤ą╗čÅ čŹčéąĖčģ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖą╣ ą┐ąŠą║ą░ ąĄčēąĄ ąĮąĄ ą░ą║čéčāą░ą╗čīąĮąŠ) ąĮą░ą┐ąĖčüą░čéčī čĆąĄčłąĄąĮąĖąĄ ą╗ą░ą▒ąĖčĆąĖąĮčéą░ ą┤ą╗čÅ ą┐ąŠąĖčüą║ą░ ą║čĆą░čéčćą░ą╣čłąĄą│ąŠ (ąĖ ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠą│ąŠ, čü ą╝ąĖąĮąĖą╝čāą╝ąŠą╝ ą╝ą░ąĮąĄą▓čĆąŠą▓) ą╝ą░čĆčłčĆčāčéą░. ąĪąĄą╣čćą░čü čĆąŠą▒ąŠčé, ą║ąŠąĮąĄčćąĮąŠ čāą┤ą░ą╗čÅąĄčé čéčāą┐ąĖą║ąŠą▓čŗąĄ ą▓ąĄčéą▓ąĖ, ąĮąŠ ą╝ą░čĆčłčĆčāčé ąĮąĄ ą▓čüąĄą│ą┤ą░ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąĮą░ąĖą║čĆą░čéčćą░ą╣čłąĖą╝. ąÜąŠąĮąĄčćąĮąŠ, ąĘą░ą┤ą░ą▓ą░čÅ čüčéčĆą░č鹥ą│ąĖčÄ, čÅ ą╝ąŠą│čā ąĘą░čüčéą░ą▓ąĖčéčī čĆąŠą▒ąŠčéą░ ą┐ąŠą╗čāčćąĖčéčī ąĮą░ąĖą║čĆą░čéčćą░ą╣čłąĖą╣ ą╝ą░čĆčłčĆčāčé (ą┐ąŠą║ą░ čŹč鹊čé ą╗ą░ą▒ąĖčĆąĖąĮčé čÅ ą╝ąŠą│čā ąŠą║ąĖąĮčāčéčī ą▓ąĘą│ą╗čÅą┤ąŠą╝ ąĖ ąŠčåąĄąĮąĖčéčī), ąĮąŠ ąĘą░ą┤ą░čćą║ą░ čéą░ą║ ąĖ ą┐čĆąŠčüąĖčéčüčÅ, čćč鹊ą▒čŗ ąĄčæ čĆąĄčłąĖą╗ąĖ. ąĢčüčéčī ąĖą┤ąĄčÅ ą║ą░ą║ čüą┤ąĄą╗ą░čéčī, čćč鹊ą▒čŗ ąĮąĄ čéčĆąĄą▒ąŠą▓ą░ą╗ąŠčüčī ąŠč湥ąĮčī ą╝ąĮąŠą│ąŠ ą┐ą░ą╝čÅčéąĖ, ą┐čĆą░ą▓ą┤ą░, ą┐ąŠčéčĆąĄą▒čāąĄčéčüčÅ ąĮąĄčüą║ąŠą╗čīą║ąŠ ąĖč鹥čĆą░čåąĖą╣. ąöą╗čÅ ą▓ą┤ąŠčģąĮąŠą▓ąĄąĮąĖčÅ ąĄčüčéčī ąĖąĮč鹥čĆąĄčüąĮą░čÅ čüčéą░čéčīčÅ https://habr.com/ru/post/445378/ . |
|
| ąÉą▓č鹊čĆ: | Ser60 [ ą¤ąĮ ą┤ąĄą║ 30, 2019 02:18:58 ] |
| ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: | Re: RSLK ąŠčé TI (Robotic System Learning Kit) |
ąśąĮč鹥čĆąĄčüąĮą░čÅ ą┐ą╗ą░čéą░, čā ą╝ąĄąĮčÅ čéą░ą║ąŠą╣ ąĮąĄčé. ą×ą┤ąĮą░ą║ąŠ, ąĮą░ ąĮąĄą╣ čüč鹊ąĖčé PSoC-6 ą┐čĆąŠčåąĄčüčüąŠčĆ ą▒ąĄąĘ ą▓čüčÅą║ąŠą╣ connectivity. ą¤ąŠčüą╗ąĄą┤ąĮčÅčÅ ą┤ąŠčüčéąĖą│ą░ąĄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ą£čÄčĆą░č鹊ą▓čüą║ąŠą│ąŠ ą╝ąŠą┤čāą╗čÅ, ąŠčüąĮąŠą▓ą░ąĮąĮąŠą│ąŠ ąĮą░ ąæčĆąŠą░ą┤ą║ąŠą╝ąŠą▓čüą║ąŠą╝ BT/WiFi čćąĖą┐ąĄ CYW4343W. ąÆąŠąŠą▒čēąĄ, čā PSoC-6 čćąĖą┐ąŠą▓ ąĮą░ ą▒ąŠčĆčéčā ąĖąĘ ą▒ąĄąĘą┐čĆąŠą▓ąŠą┤ą║ąĖ č鹊ą╗čīą║ąŠ BLE (ą╝ąŠą┤ąĄą╗ąĖ 63/64). ąöąŠ čŹč鹊ą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī WiFi ąĮą░ Mudus ąĮąĄ ą┐čĆąŠą▒ąŠą▓ą░ą╗. ą×ą▒čŗčćąĮąŠ ą┤ą╗čÅ čŹč鹊ą│ąŠ čüą╗čāąČąĖčé Wicked (a ąŠąĮą░ ąĖ BLE ą╝ąŠąČąĄčé). ąØą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╝ čüąĄą╝ąĖąĮą░čĆąĄ ą╝ąĮąĄ čüą║ą░ąĘą░ą╗ąĖ, čćč鹊 ąĄčüą╗ąĖ čģąŠčćčā ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ąĪą░ą╣ą┐čĆąŠą▓čüą║ąĖąĄ WiFi, č鹊 Wicked čüą╗ąĄą┤čāąĄčé ąŠčüčéą░ą▓ąĖčéčī ąĮą░čĆčÅą┤čā čü Modus. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ-ą╗ąĖ čüąĄą╣čćą░čü WiFi ąĮą░ ą£ąŠą┤čāčüąĄ - ąĮąĄ ąĘąĮą░čÄ. ąśąĘ čüąĄą╝ąĖąĮą░čĆą░ čÅ čéą░ą║ ą┐ąŠąĮčÅą╗, čćč鹊 ą┐ąŠą║ą░ ąĮąĄčé, ąĮąŠ ą╝ąŠą│čā ąŠčłąĖą▒ą░čéčīčüčÅ. ąÆčüčæ-čéą░ą║ąĖ čüąĄą╝ąĖąĮą░čĆ ą▒čŗą╗ ą┐čĆąŠ BT-mesh. ąÜčüčéą░čéąĖ, CYW4343W čćąĖą┐ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé č鹊ą╗čīą║ąŠ BLE 4.1. ąĪčéčĆą░ąĮąĮąŠ, čćč鹊 ą▓ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ čāą┐ąŠą╝ąĖąĮą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ Modus. ą£ąŠąČąĄčé ą╗čāčćčłąĄ CY8CPROTO-063-BLE ą║čāą┐ąĖčéčī, ąĖą╗ąĖ WiFi ąĮčāąČąĄąĮ? ąŻ ąĪąĖą╗ą╗ą░ą▒ąŠą▓ čĆą░ąĘčĆą░ą▒ąŠčéą║ą░ WiFi ąĖ BT ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮą░ ą▓ Studio. ą¤čĆą░ą▓ą┤ą░, čā ąĮąĖčģ ąĮąĄčé WiFi+BLE čāčüčéčĆąŠą╣čüčéą▓. ąØą░čüčćčæčé ą▒ąŠą╗č鹊ą▓, čÅ čĆą░ą┤, čćč鹊 ąĮą░čłčæą╗ čäąĖčĆą╝čā (čŹč鹊, ą┐čĆą░ą▓ą┤ą░, ą▒čŗą╗ąŠ čāąČąĄ ą┤ą░ą▓ąĮąŠ), ą│ą┤ąĄ ąĘą░ą║ą░ąĘčŗą▓ą░čéčī ą╝ąĄą╗ą║ąĖąĄ ą▒ąŠą╗čéčŗ/ą│ą░ą╣ą║ąĖ ąĖ ą┐čĆ (Fastenal). ąŻ ąĮąĖčģ ąĄčüčéčī ąŠčéą┤ąĄą╗ąĄąĮąĖąĄ ą▓ ąĮą░čłąĄą╝ ą│ąŠčĆąŠą┤ąĄ ąĖ čéčāą┤ą░ ą┤ąŠčüčéą░ą▓ą║ą░ ą▒ąĄčüą┐ą╗ą░čéąĮą░čÅ. ąśąĮą░č湥 čéą░ą║čāčÄ ą╝ąĄą╗ąŠčćčī ą▓ čłąĖčĆąŠą║ąŠą╝ ą▓čŗą▒ąŠčĆąĄ ą║čāą┐ąĖčéčī ąĮąĄą│ą┤ąĄ ąĘą┤ąĄčüčī. ąÆąŠ ą▓čüąĄčģ čüą▓ąŠąĖčģ čāčüčéčĆąŠą╣čüčéą▓ą░čģ ąĖčüą┐ąŠą╗čīąĘčāčÄ M2 ąĖą╗ąĖ #2-56. ą¤ą╗ą░čéčŗ čā ą╝ąĄąĮčÅ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ ą╝ą░ą╗ąĄąĮčīą║ąĖąĄ ąĖ čéčāą┤ą░ M3 čģčāąČąĄ ą▓ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ. ąöčāą╝ą░čÄ, ąĖ ą┤ą╗čÅ ąÆą░čłąĖčģ čĆąŠą▒ąŠč鹊ą▓ ą£2 ą▒čāą┤ąĄčé ą╗čāčćčłąĄ ą▓ ą┐ą╗ą░ąĮąĄ ą╝ąĄčüčéą░(?) ąŚą░ą║ąŠąĮčćąĖą╗ ą▓č鹊čĆčāčÄ čćą░čüčéčī čüčéą░čéčīąĖ ą┐čĆąŠ BLE security. ąØą░ čüą╗ąĄą┤. ąĮąĄą┤ąĄą╗ąĄ ą┤čāą╝ą░čÄ ąŠčüąĖą╗ąĖčéčī čéčĆąĄčéčīčÄ ąĖ č鹊ą│ą┤ą░ ą║ą░ą║ čĆą░ąĘ ą┐ąŠčüą╗ąĄ ąĘąĖą╝ąĮąĄą╣ čüą┐čÅčćą║ąĖ ą┐čāą▒ą╗ąĖą║ą░čåąĖąĖ ą▓ąŠąĘąŠą▒ąĮąŠą▓čÅčéčüčÅ. ąŻą▓ąĄčĆąĄąĮ, čćč鹊 ą┐čĆąĖ ąÆą░čłąĄą╣ ą║ą▓ą░ą╗ąĖčäąĖą║ą░čåąĖąĖ ąŠčüąĖą╗ąĖčéčī Java ąĖ Android Studio čü ąĮčāą╗čÅ ą▒čāą┤ąĄčé ąĮąĄčüą╗ąŠąČąĮąŠ. ąÜčüčéą░čéąĖ, čÅ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą┐ąŠąĮčÅą╗, čćč鹊 čü Java čā ąÆą░čü ąĮąĄčé ą┐ąŠą║ą░ ąŠą┐čŗčéą░? |
|
| ąÉą▓č鹊čĆ: | uldemir [ ąĪčĆ čÅąĮą▓ 01, 2020 16:48:37 ] |
| ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: | Re: RSLK ąŠčé TI (Robotic System Learning Kit) |
ąÆąŠąĘą╝ąŠąČąĮąŠ, ą╝ąĄąĮčÅ ą▒ąŠą╗čīčłąĄ ą║ą░ą║ čĆą░ąĘ ąĖąĮč鹥čĆąĄčüąŠą▓ą░ą╗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą║ą░ą║ čéą░ą║ąŠą▓ąŠą╣, ą▒ąĄąĘ connectivity. ą¤ąŠč鹊ą╝čā ą║ą░ą║ ą▓ ą▓ąŠą┐čĆąŠčüą░čģ čüą▓čÅąĘąĖ čÅ čüąŠą▓ąĄčĆčłąĄąĮąĮąŠ čüą╗ą░ą▒ ąĖ ą┐ą╗ąŠčģąŠ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄ, ą║ą░ą║ čŹč鹊 čĆą░ą▒ąŠčéą░ąĄčé ą▓ąŠąŠą▒čēąĄ. ą¤ąŠčŹč鹊ą╝čā ą╝ąŠą╣ ą▓čŗą▒ąŠčĆ ą┐ą░ą╗ ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čü ąŠčéą┤ąĄą╗čīąĮčŗą╝ BLE ą╝ąŠą┤čāą╗ąĄą╝. ąÉ ąĘą░ čüč湥čé č鹊ą│ąŠ, čćč鹊 čā ąĮąĄą│ąŠ ą┤ą▓ą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ - ą▒čāą┤ąĄčé ąĘą░ą┐ą░čüąĮąŠą╣ ą▓ą░čĆąĖą░ąĮčé, ąĄčüą╗ąĖ ą╝ąĮąĄ ąĮąĄ čģą▓ą░čéąĖčé ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą┤ą╗čÅ ą░ąĮą░ą╗ąĖąĘą░ ą║ą░čĆčéąĖąĮą║ąĖ čü ą¤ąŚąĪ ą╗ąĖąĮąĄą╣ą║ąĖ. UDB ą▒ą╗ąŠą║ąĖ ąŠą║ą░ąĘčŗą▓ą░čÄčéčüčÅ čā ąĮąĄą│ąŠ ąĄčüčéčī (ąĮą░ ą║ą░čĆčéąĖąĮą║ąĄ čüč鹊čÅą╗ čŹč鹊čé ą╝ąŠą┤čāą╗čī čü ą║čĆą░čÄčłą║čā, ą┐ąŠčćčéąĖ ąĮąĄąĘą░ą╝ąĄčéąĮąŠ). ąÆąŠąŠą▒čēąĄ, čŹčéąĖ ą▒ą╗ąŠą║ąĖ ą┐ąŠą╝ąŠą│ą░čÄčé čāą┐čĆąŠčüčéąĖčéčī ą┐čĆąŠą│čĆą░ą╝ą╝čā. ąĢčüą╗ąĖ ą▓ MSP432 ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┐čĆąŠą╣ą┤ąĄąĮąĮąŠą│ąŠ ą┐čāčéąĖ ąĖ ą║ąŠąĮčéčĆąŠą╗čÅ ą▓čĆą░čēąĄąĮąĖčÅ ą║ąŠą╗čæčü ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą▓čŗąĘčŗą▓ą░čÄčéčüčÅ č鹥ą╝ čćą░čēąĄ, č湥ą╝ ą▒čŗčüčéčĆąĄąĄ ą▓čĆą░čēą░čÄčéčüčÅ ą║ąŠą╗čæčüą░, č鹊 ą▓ PSoC5 čÅ čŹč鹊čé ą╝ąŠą┤čāą╗čī ąĮą░čĆąĖčüąŠą▓ą░ą╗ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝. ąĪą║ą░ąĘą░ą╗ ą▒čŗ ą▒ąĄąĘ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣... ąĮąŠ čéą░ą╝ ąĄčüčéčī čüą║čĆčŗč鹊ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą▓ ą╝ąŠą┤čāą╗ąĄ QuadDec, čéą░ą║ ą║ą░ą║ 16 ą▒ąĖčé čéą░ą╝ čüčćąĖčéą░čÄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéąĮąŠ, ą░ ąŠčüčéą░ą╗čīąĮčŗąĄ 16 - ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ. ąÆąŠčé ą┐čĆąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ 16 ą▒ąĖčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĖ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ.  ąŁč鹊 čÅ ą▓čŗčéą░čēąĖą╗ ąŠą┤ąĖąĮ ą║ą░ąĮą░ą╗ ą▓ č鹥čüč鹊ą▓čāčÄ ą║ąŠąĮčüčéčĆčāą║čåąĖčÄ, čćč鹊ą▒čŗ ą┐čĆąŠčüą╗ąĄą┤ąĖčéčī ąĘą░ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄą╝ ą╝ąŠą┤čāą╗čÅ. ąÆą╝ąĄčüč鹊 EncRightA ą▒čŗą╗ ą┐čĆąŠčüč鹊 ą┐ąŠą▓ąĄčüąĖą▓čłąĖ čüąĮą░čćą░ą╗ą░ ą║ąĮąŠą┐ą║čā, ą░ ą┐ąŠąĘąČąĄ ą│ąĄąĮąĄčĆą░č鹊čĆ, čćč鹊ą▒čŗ čāą▒ąĄą┤ąĖčéčīčüčÅ čćč鹊 ą▓čüčæ čĆą░ą▒ąŠčéą░ąĄčé, ą║ą░ą║ ąĘą░ą┤čāą╝čŗą▓ą░ą╗ąŠčüčī. ą¤ąŠą║ą░ čćč鹊, čüąĖčüč鹥ą╝ą░ čüčćąĖčéą░ąĄčé ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą╝ąĄąČą┤čā čäčĆąŠąĮčéą░ą╝ąĖ ąĖą╝ą┐čāą╗čīčüąŠą▓ ąĮą░ EncRightA. ąÉ EncRightB ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čĆą░čēąĄąĮąĖčÅ. ąĢčüą╗ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ čäčĆąŠąĮčéą░ ąĖą╝ą┐čāą╗čīčüą░ ąĮą░ čŹč鹊ą╝ ą▓čģąŠą┤ąĄ ą▒čŗą╗ą░ ą╗ąŠą│1, č鹊 ą▓ ąĄą┤ąĖąĮąĖčåčā čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąŠą┤ąĖąĮ čéčĆąĖą│ą│ąĄčĆ, ąĄčüą╗ąĖ ą╗ąŠą│0, č鹊 ą▓č鹊čĆąŠą╣. Timer_Right ąŠčéą╝ąĄčĆčÅąĄčé ą▓čĆąĄą╝čÅ ą╝ąĄąČą┤čā čäčĆąŠąĮčéą░ą╝ąĖ ąĖą╝ą┐čāą╗čīčüąŠą▓. ą×ąĮ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ OneShot čéą░ą╣ą╝ąĄčĆ, ąĖ ą┐ąŠ ą┐čĆąĖčģąŠą┤čā čäčĆąŠąĮčéą░ ąĖą╝ą┐čāą╗čīčüą░ ąĘąĮą░č湥ąĮąĖąĄ Counter čéą░ą╣ą╝ąĄčĆą░ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą▓ Capture čĆąĄą│ąĖčüčéčĆ. ąóčāčé ąČąĄ čüč湥čéčćąĖą║ "ąŠą▒ąĮčāą╗čÅąĄčéčüčÅ" ąĖ ąĮą░čćąĖąĮą░ąĄčé ąŠčéčüč湥čé čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ąĖąĮč鹥čĆą▓ą░ą╗ą░. ąÆąŠčé čéčāčé čćąĖčéą░ą╗-čćąĖčéą░ą╗ ą┤ą░čéą░čłąĖčé ąĮą░ čéą░ą╣ą╝ąĄčĆ ąĖ ą▓ ąŠą┐ąĖčüą░ąĮąĖąĖ ą│ąŠą▓ąŠčĆąĖą╗ąŠčüčī, čćč鹊 čüąĖą│ąĮą░ą╗ čĆąĄčüąĄčé čüą▒čĆą░čüčŗą▓ą░ąĄčé ą╝ąĮąŠą│ąŠ č湥ą│ąŠ, ąĮąŠ ą┐čĆąŠ čĆąĄą│ąĖčüčéčĆ ąĘą░čģą▓ą░čéą░ ąĮąĖč湥ą│ąŠ ąĮąĄ ą│ąŠą▓ąŠčĆąĖą╗ąŠčüčī. ąÆąŠčé ąĖ čģąŠč鹥ą╗ąŠčüčī ą┐čĆąŠą▓ąĄčĆąĖčéčī, ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠ ą╗ąĖ čüąĖą│ąĮą░ą╗ čüą▒čĆąŠčüą░ ąĮąĄ čéčĆąŠąĮąĄčé čĆąĄą│ąĖčüčéčĆ ąĘą░čģą▓ą░čéą░. ąÆąŠąŠą▒čēąĄ, ą┐čĆąŠ čĆąĄą│ąĖčüčéčĆ ąĘą░čģą▓ą░čéą░ ą▓ ą┤ą░čéą░čłąĖč鹥 ą║ą░ą║ą░čÅ-č鹊 ąĮąĄ ą┐ąŠą╗ąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ. ąØąŠ ą╝ąĮąĄ ą┐ąŠą▓ąĄąĘą╗ąŠ - ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠ, čĆąĄčüąĄčé ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ čĆąĄą│ąĖčüčéčĆ ąĘą░čģą▓ą░čéą░, ą┐ąŠčŹč鹊ą╝čā čÅ ąĄą│ąŠ ą╝ąŠą│čā čüčćąĖčéą░čéčī č鹊ą│ą┤ą░ ą║ąŠą│ą┤ą░ ą╝ąĮąĄ čŹč鹊 čāą┤ąŠą▒ąĮąŠ ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ Capture. ąĢčüą╗ąĖ ąČąĄ ąĖą╝ą┐čāą╗čīčüąŠą▓ ą┤ąŠą╗ą│ąŠ ąĮąĄčé (ąŠą▒ąŠčĆąŠčéčŗ ąŠč湥ąĮčī ąĮąĖąĘą║ąĖąĄ), č鹊 čüč湥čéčćąĖą║ ą╝ąŠąČąĄčé ą┤ąŠčüčćąĖčéą░čéčī ą┤ąŠ čüą▓ąŠąĄą│ąŠ ą┐čĆąĄą┤ąĄą╗ą░ (65535) ąĖ ąĮą░ ąŠą┤ąĖąĮ čéą░ą║čé ą▓čŗčüčéą░ą▓ąĖčéčī ą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ąĮą░ ą▓čŗčģąŠą┤ąĄ TC. ąŁč鹊čé čüąĖą│ąĮą░ą╗ čüą▒čĆąŠčüąĖčé ąŠą▒ą░ čéčĆąĖą│ą│ąĄčĆą░ ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĖčģ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čĆą░čēąĄąĮąĖčÅ, čćč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┤ą▓ąĖą│ą░č鹥ą╗čī ąĮąĄ ą║čĆčāčéąĖčéčüčÅ ąĮąĖ ą▓ą┐ąĄčĆąĄą┤, ąĮąĖ ąĮą░ąĘą░ą┤, ą░ čüč鹊ąĖčé ąĮą░ ą╝ąĄčüč鹥. ąÉ ą▓ąŠčé čéčāčé ąĄčüčéčī ąĮčÄą░ąĮčü, ą║ąŠč鹊čĆčŗą╣ č鹊ąČąĄ ą▓ ą┤ą░čéą░čłąĖč鹥 ąĮąĄ ąŠą┐ąĖčüą░ąĮ (ąĖą╗ąĖ čÅ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé ąĮąĄ ąĮą░čłąĄą╗). ąĢčüą╗ąĖ čéą░ą╣ą╝ąĄčĆ Fixed Function, č鹊 čĆąĄą│ąĖčüčéčĆ ąĘą░čģą▓ą░čéą░ "ąŠą▒ąĮčāą╗čÅąĄčéčüčÅ", ą░ ąĄčüą╗ąĖ UDB, č鹊 ąŠčüčéą░čæčéčüčÅ ąĮąĄąĖąĘą╝ąĄąĮąĮčŗą╝. ąĪąŠą▒čüčéą▓ąĄąĮąĮąŠ, ą╝ąĄąĮčÅ čāčüčéčĆą░ąĖą▓ą░čÄčé ąŠą▒ą░ ą┐ąŠą▓ąĄą┤ąĄąĮąĖčÅ. ąØąŠ, čĆą░ą▒ąŠčéą░ čéą░ą╣ą╝ąĄčĆą░ ą▓ čĆąĄąČąĖą╝ąĄ FF ą╝ąĮąĄ ą┐ąŠąĮčĆą░ą▓ąĖą╗ą░čüčī ą▒ąŠą╗čīčłąĄ, č湥ą╝ UDB. ąĪčéą░ą▒ąĖą╗čīąĮąĄąĄ. ąźąŠčéčÅ FF ą┤ą░čæčé ą▒ąŠą╗čīčłčāčÄ ąĘą░ą┤ąĄčƹȹ║čā ą┐čĆąĖ čüą▒čĆąŠčüąĄ (2 čéą░ą║čéą░, ą┐čĆąŠčéąĖą▓ 1 čéą░ą║čéą░ UDB). ąØąŠ čŹčéą░ ąĘą░ą┤ąĄčƹȹ║ą░ ą┤ąĄč鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĮą░čÅ ąĖ ąĄčæ ą╝ąŠąČąĮąŠ ą║ąŠą╝ą┐ąĄąĮčüąĖčĆąŠą▓ą░čéčī. ąÆąŠąŠą▒čēąĄ, ą▓ čüąĖčüč鹥ą╝ąĄ ąĘą░ą┤ąĄčƹȹ║ą░ 3 čéą░ą║čéą░. ąĢčēąĄ ąŠą┤ąĖąĮ čéą░ą║čé ąĘą░ą┤ąĄčƹȹ║ąĖ ą┤ą░čæčé EdgeDetect. ą¤ąŠčŹč鹊ą╝čā ą▓ ą┤ą░ąĮąĮąŠą╣ č鹥čüč鹊ą▓ąŠą╣ čüčģąĄą╝ąĄ ąĮą░ ą┤ąĖčüą┐ą╗ąĄąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé 0F9D, ą▓ą╝ąĄčüč鹊 0FA0 (4000 = 12000000/3000). ąØąŠ čéą░ą║ ą║ą░ą║ čŹč鹊 ą┐čĆąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗčģ ąŠą▒ąŠčĆąŠčéą░čģ ą╝ąŠč鹊čĆą░ 30000rpm, ą┤ą░ąČąĄ ąĄčüą╗ąĖ ąĮąĄ ą║ąŠą╝ą┐ąĄąĮčüąĖčĆąŠą▓ą░čéčī, ąŠčłąĖą▒ą║ą░ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą╝ąĄąĮąĄąĄ 0.1% - ą┤ąČąĖčéč鹥čĆ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ/菹Įą║ąŠą┤ąĄčĆą░ ą│ąŠčĆą░ąĘą┤ąŠ ą▒ąŠą╗čīčłąĄ. ą£ą╝ą╝, ą┐ąŠč湥ą╝čā "ąŠą▒ąĮčāą╗čÅąĄčéčüčÅ" čÅ ą┐ąĖčłčā ą▓ ą║ą░ą▓čŗčćą║ą░čģ? ą×č湥ąĮčī ą┐čĆąŠčüč鹊 - ą▓čüąĄ čéą░ą╣ą╝ąĄčĆčŗ čéčāčé čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ą║ą░ą║ count down, ąĖ ą▓ą╝ąĄčüč鹊 0 čéą░ą╝ 0xFFFF. ą¤ąŠčŹč鹊ą╝čā ą┐čĆąĖčģąŠą┤ąĖčéčüčÅ ą┐čĆąĖ čüčćąĖčéčŗą▓ą░ąĮąĖąĖ ą▓čüąĄ ą▒ąĖčéčŗ ą┐ąĄčĆąĄą▓ąŠčĆą░čćąĖą▓ą░čéčī. ą¤ąŠč湥ą╝čā ą┐čĆąĖčłą╗ąŠčüčī čüčéčĆąŠąĖčéčī č鹥čüč鹊ą▓čāčÄ ą║ąŠąĮčüčéčĆčāą║čåąĖčÄ? ąÉ ą┐ąŠč鹊ą╝čā čćč鹊 ąĮąĄ ąĮą░čłąĄą╗, ą║ą░ą║ ą▓ ąŠčéą╗ą░ą┤čćąĖą║ąĄ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ ąĘą░čģą▓ą░čéą░. ąźąŠčéčÅ, ą╝ąŠąČąĄčé, ą┐čĆąĖčćąĖąĮąŠą╣ č鹊, čćč鹊 ąŠčéą╗ą░ą┤čćąĖą║ ą┐ąŠą║ą░ąĘčŗą▓ą░ą╗ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ counter. ąÉ ą▓ ą┤ą░čéą░čłąĖč鹥, ąĮą░ą┐ąĖčüą░ąĮąŠ, čćč鹊 ą┐čĆąĖ "čćč鹥ąĮąĖąĖ" ąĘąĮą░č湥ąĮąĖčÅ čüč湥čéčćąĖą║ą░ ąŠąĮąŠ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ąĘą░čģą▓ą░čéčŗą▓ą░ąĄčéčüčÅ (ąĖ ą┐ąŠčĆčéąĖčé čĆąĄą│ąĖčüčéčĆ ąĘą░čģą▓ą░čéą░, ąĮą░ą┤ąŠ ą┐ąŠą╗ą░ą│ą░čéčī). ąóčāčé ąĖ Creator ą╝ąĄąĮčÅ č鹊ąČąĄ ą┐ąŠčĆą░ą┤ąŠą▓ą░ą╗ čüą▓ąŠąĖą╝ąĖ ąĮąĄčĆąĄčłąĄąĮąĮčŗą╝ąĖ ą│ą╗čÄą║ą░ą╝ąĖ. ąÜąŠą│ą┤ą░ čÅ ą╗ąĄč鹊ą╝ ąĮą░ čüą▓ąŠčæą╝ ąĮąĄčéą▒čāą║ąĄ čĆą░ą▒ąŠčéą░ą╗ čü PSoC Creator, ąĘą░ą╝ąĄčéąĖą╗, čćč鹊 ą▓ čüčéą░čéčāčüąĮąŠą╣ čüčéčĆąŠą║ąĄ ąĮąĄ čāą┤ą░ą╗čÅčÄčéčüčÅ ąŠčłąĖą▒ą║ąĖ ąŠčé ą┐čĆąĄą┤čŗą┤čāčēąĖčģ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖą╣. ąó.ąĄ. čüą┤ąĄą╗ą░ą╗ čüą▒ąŠčĆą║čā ą┐čĆąŠąĄą║čéą░ - ąŠą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 ąĄčüčéčī 2 ąŠčłąĖą▒ą║ąĖ. ąÆąĮąĖąĘčā ą┐ąŠčÅą▓ąĖą╗ąĖčüčī ą║čĆą░čüąĮčŗąĄ čåąĖčäčĆčŗ 2 Errors. ą» ąĖčüą┐čĆą░ą▓ą╗čÅčÄ, ą┐ąĄčĆąĄčüąŠą▒ąĖčĆą░čÄ, ąĪą▒ąŠčĆą║ą░ ą▒ąĄąĘ ąŠčłąĖą▒ąŠą║. ąØąŠ ą▓ čüčéą░čéčāčüąĮąŠą╣ čüčéčĆąŠą║ąĄ ąŠčłąĖą▒ą║ąĖ ą║ą░ą║ čüč鹊čÅą╗ąĖ čéą░ą║ ąĖ čüč鹊čÅčé. ąś čģčāąČąĄ č鹊ą│ąŠ, ą▓ ąŠą║ąŠčłą║ąĄ Notice List ąŠąĮąĖ č鹊ąČąĄ čüč鹊čÅčé. ąÉ čéčāčé ąĮą░ čüčéą░čåąĖąŠąĮą░čĆąĮąŠą╝ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ ąĮą░ą▒ą╗čÄą┤ą░čÄ čéą░ą║čāčÄ ąČąĄ ą┐čĆąŠą▒ą╗ąĄą╝čā. ą┐čĆąĖč湥ą╝, ąĮąĄ ąĮčāąČąĮąŠ ą┤ą░ąČąĄ ą┤ąĄą╗ą░čéčī čüą▒ąŠčĆą║čā. ąöąŠčüčéą░č鹊čćąĮąŠ ą▓ TopDesign ąŠčéčüąŠąĄą┤ąĖąĮąĖčéčī ąŠą┤ąĮčā čåąĄą┐čī, čćč鹊ą▒čŗ ąĖąĘą╝ąĄąĮąĖčéčī čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ, ą║ą░ą║ ą┐ąŠčÅą▓ą╗čÅčÄčéčüčÅ ą║čĆą░čüąĮčŗąĄ ąŠčłąĖą▒ą║ąĖ, čćč鹊 ą▓čŗą▓ąŠą┤ čéą░ą║ąŠą╣-č鹊, ąĄčüą╗ąĖ ąŠąĮ ąĄčüčéčī, č鹊 ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ. ąś ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čÅ čüą┤ąĄą╗ą░ą╗ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ - ąŠąĮąŠ ąĮąĄ ąĖčüč湥ąĘą░ąĄčé. ą¤ąŠą┐čŗčéą░ą╗čüčÅ ą▓čŗą│čāą│ą╗ąĖčéčī ą┐čĆąŠą▒ą╗ąĄą╝čā. ąöą░, ą┐čĆąŠą▒ą╗ąĄą╝ą░ ąĄčüčéčī ąĖ ąĖąĘą▓ąĄčüčéąĮą░. ąØą░čłąĄą╗ č鹊ą┐ąĖą║, ąŠčé 2017 ą│ąŠą┤ą░. ąóą░ą╝ č湥ą╗ąŠą▓ąĄą║ ąČą░ą╗ąŠą▓ą░ą╗čüčÅ ąĮą░ ą┐čĆąŠą▒ą╗ąĄą╝čā ą▓ ą▓ąĄčĆčüąĖąĖ 4.1. ąĢą│ąŠ ą┐ąŠčüą╗ą░ą╗ąĖ ą▓ Knowledge Base - čéą░ą╝ ąŠąĮąŠ ąŠą┐ąĖčüą░ąĮąŠ ą┤ą╗čÅ ą▓ąĄčĆčüąĖąĖ 4.0 čü ąŠą▒ąĄčēą░ąĮąĖąĄą╝ ąĖčüą┐čĆą░ą▓ąĖčéčī ą▓ 4.1. ąÉ čéčāčé čāąČąĄ 4.2 ąĮą░ ą┤ą▓ąŠčĆąĄ ąĖ 4.3 ą▓ ą▒ąĄčéą░ čüčéą░ą┤ąĖąĖ (ą╝ąŠąČąĄčé, ą▓ 4.3 čŹč鹊 ą┐ąŠą▒ąĄą┤ąĖą╗ąĖ?). ąÉ ą║ą░ą║ workaround ą┐čĆąĄą┤ą╗ąŠąČąĖą╗ąĖ ą┐ąĄčĆąĄąĘą░ą┐čāčüčéąĖčéčī PSoC Creator, ą┤ą╗čÅ čüą▒čĆąŠčüą░ čüčéą░čĆčŗčģ ąŠčłąĖą▒ąŠą║. ąØčā čģąŠčĆąŠčłąŠ, ąĄčēąĄ čćč鹊 Creator ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą▒čŗčüčéčĆąĄąĄ, č湥ą╝ ą┐ąŠą┤ąĄą╗ąĖčÅ ąĮą░ ą▒ą░ąĘąĄ ąŁą║ą╗ąĖą┐čüą░. CCS ą┤ą░ąČąĄ ąĮą░ čüčéą░čåąĖąŠąĮą░čĆąĮąŠą╝ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ąŠč湥ąĮčī ą┤ąŠą╗ą│ąŠ. ąĢčüą╗ąĖ čŹč鹊 ą▒čāą┤ąĄčé ą▓ ą£ąŠą┤čāčüąĄ - čÅ ąĮąĄ ą┐ąĄčĆąĄąČąĖą▓čā. ąĪą╝ąĄčģą░ ą┤ą╗čÅ ą┐ąŠčüčéą░ą▓ąĖą╗ ą£ąŠą┤čāčü. ąŻą▓čŗ, ą┐ąĄčĆąĄčéą░čēąĖčéčī čüčāčēąĄčüčéą▓čāčÄčēąĖąĄ ą┐čĆąŠąĄą║čéčŗ ąĖąĘ Creator ąĮąĄ ą┐čĆąĄą┤ą╗ą░ą│ą░ąĄčé ąĖ ą▓ ąĖą╝ą┐ąŠčĆč鹥 čéą░ą║ąŠą╣ čäąĖčćąĖ ąĮąĄ ąĮą░čłąĄą╗. ą×ą║, ą┐čāčüčéčī ą┐ąŠčüč鹊ąĖčé, ą┐ąŠą┤ąŠąČą┤čæčé ą┐ą╗ą░čéą║ąĖ čü PSoC6. ąÜčĆąĄą┐ąĄąČąŠą╝ čÅ čĆą░ąĮčīčłąĄ ąĘą░čéą░čĆąĖą▓ą░ą╗čüčÅ ą▓ Wurth (čā ąĮą░čü ą▓ ą│ąŠčĆąŠą┤ąĄ ąĄčüčéčī ą╝ą░ą│ą░ąĘąĖąĮčćąĖą║). ą”ąĄąĮčŗ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą▓čŗčüąŠą║ąĖąĄ, ąĮąŠ ąĘą░č鹊 ąĮąĄčé ą┐čĆąŠą▒ą╗ąĄą╝ čü ą║ą░č湥čüčéą▓ąŠą╝. ąÆąŠčé č鹊ą╗čīą║ąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ čā ąĮąĖčģ ą║ą░ą║ čā ąŠčäąĖčüąŠą▓ ąĖ čüčāą▒ą▒ąŠčéą░-ą▓ąŠčüą║čĆąĄčüąĄąĮčīąĄ - ą▓čŗčģąŠą┤ąĮčŗąĄ. ąóą░ą║ čćč鹊 č鹥ą┐ąĄčĆčī čÅ čéčāą┤ą░ ąĮąĄ ą┐ąŠą┐ą░ą┤ą░čÄ. ąÆąŠčé ąĖ ą┐čĆąĖčģąŠą┤ąĖčéčüčÅ ą┐ąŠą║čāą┐ą░čéčī ą▓ ąĖąĮč鹥čĆąĮąĄčéą░čģ, čéą░ą║ ą║ą░ą║ ą▓ ą┤čĆčāą│ąĖčģ ą╝ą░ą│ą░ąĘąĖąĮą░čģ ąĖą╗ąĖ ąĮąĄčé č鹊ą│ąŠ čćč鹊 ąĮčāąČąĮąŠ, ąĖą╗ąĖ ą║ą░č湥čüčéą▓ąŠ... ąÆąŠąĮ ą▓ ą┐čĆąŠčłą╗čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ č乊č鹊ą│čĆą░čäąĖčĆąŠą▓ą░ą╗ čĆąŠą▒ąŠč鹊ą▓ ąĖ ąĖąĘą▓ąĖąĮčÅą╗čüčÅ čćč鹊 ą│ą░ąĄčćą║ąĖ ąĮąĄ ą┐čĆąĖą║čĆčāč湥ąĮąĮčŗąĄ. ą×ąĮąĖ ą▒čŗą╗ąĖ ąĮąĄ ą┐čĆąĖą║čĆčāč湥ąĮąĮčŗąĄ, ą┐ąŠč鹊ą╝čā čćč鹊 ą│ą░ą╣ą║ąĖ ą║čāą┐ą╗ąĄąĮąĮčŗąĄ ąĮą░ ą▒ą░ąĘą░čĆąĄ - čéčĆąĄčéčī ą▒čĆą░ą║. ąś ą║ąŠą│ą┤ą░ ą╝ąĮąĄ ąĮą░ą┤ąŠąĄą╗ąŠ ąĖčüą║ą░čéčī ą▓ čŹč鹊ą╝ ą▒ą░čĆą░čģą╗ąĄ ąĮąŠčĆą╝ą░ą╗čīąĮčŗąĄ ą│ą░ą╣ą║ąĖ, ą▒čĆąŠčüąĖą╗ čÅ čŹčéčā ąĘą░č鹥čÄ ąĖ ą┐ąŠčłąĄą╗ ąĘą░ą║ą░ąĘčŗą▓ą░čéčī ąĮą░ čäą░čĆąĮąĄą╗ąĄ ąĮąŠčĆą╝ą░ą╗čīąĮčŗąĄ ą│ą░ą╣ą║ąĖ ą£2.5. ąĪą░ą╝ čÅ ąĘą░ą║ą╗ą░ą┤čŗą▓ą░čÄčüčī ąĮą░ ą£3 - čā ą╝ąĄąĮčÅ ąĖčģ ąĮą░ąĖą▒ąŠą╗ąĄąĄ čłąĖčĆąŠą║ąĖą╣ ą░čüčüąŠčĆčéąĖą╝ąĄąĮčé ą┐ąŠ čéąĖą┐ą░ą╝, ą┐ąŠ ą┤ą╗ąĖąĮą░ą╝. ą£ąĄąĮčīčłąĖąĄ - ąĖčģ ą│ąŠčĆą░ąĘą┤ąŠ ą╝ąĄąĮčīčłąĄ. ąÉ ąĮąĄ ą╝ąĄčéčĆąĖčćčüą║ąĖąĄ, čéąĖą┐ą░ #2-56 - čüčéą░čĆą░čÄčüčī ąĖąĘą▒ąĄą│ą░čéčī. ąźąŠčéčÅ, ą║čāą┤ą░ ąŠčé ąĮąĖčģ ą┤ąĄąĮąĄčłčīčüčÅ, ąĄčüą╗ąĖ Pololu ą║ąŠą╝ą┐ą╗ąĄą║čéčāąĄčé ą▓čüčæ čéą░ą║ąĖą╝ąĖ ą▓ąĖąĮčéąĖą║ą░ą╝ąĖ. ąØčā ąĖ ą║ąŠąĮąĄčćąĮąŠ, ąĪ ąĮąŠą▓čŗą╝ ą│ąŠą┤ąŠą╝! |
|
| ąÉą▓č鹊čĆ: | Ser60 [ ąĪčĆ čÅąĮą▓ 01, 2020 21:44:29 ] |
| ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: | Re: RSLK ąŠčé TI (Robotic System Learning Kit) |
ąŻ ą╝ąĄąĮčÅ čü PSoC-6 čéą░-ąČąĄ ą┐čĆąŠą▒ą╗ąĄą╝ą░, čćč鹊 ąĖ čü MSP432 - ą║ąŠčĆą┐čāčüą░. ąŻ PSoC ą▓ čŹč鹊ą╝ ąŠčéąĮąŠčłąĄąĮąĖąĖ ąĄčēčæ čģčāąČąĄ, čé.ą║. ąŠąĮąĖ ą▓čŗą┐čāčüą║ą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ BGA-ą┐ąŠą┤ąŠą▒ąĮčŗčģ čü ą╝ąĖą╗ą╗ąĖąŠąĮąŠą╝ ą▓čŗą▓ąŠą┤ąŠą▓. ą×čüčéą░čæčéčüčÅ ąĮą░ą┤ąĄčÅčéčīčÅčüčÅ ą╗ąĖčłčī ąĮą░ čĆą░čüą┐ą░čÅąĮąĮčŗąĄ ąĮą░ ą┐ą╗ą░čéą░čģ čćąĖą┐čŗ. ąÆ čĆąŠą▒ąŠčé čéą░ą║čāčÄ ą┐ą╗ą░čéčā ą┐ąŠčüčéą░ą▓ąĖčéčī, ąĮą░ą▓ąĄčĆąĮąŠąĄ, ą┐čĆąŠą▒ą╗ąĄą╝ ąĮąĄčé, ąĮąŠ ą▓ ą┐ąŠą┤ąĄą╗ą║čā ą║ą░ą║-č鹊 ąĮąĄ ąŠč湥ąĮčī. ąĢčüčéčī, ą┐čĆą░ą▓ą┤ą░, ą▓ą░čĆąĖą░ąĮčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī BLE ą╝ąŠą┤čāą╗ąĖ ąĮą░ ąŠčüąĮąŠą▓ąĄ PSoC-6. ąŻ ąĮąĖčģ ą▓čüąĄą│ąŠ 43 ą▓čŗą▓ąŠą┤ą░ ą┐ąŠ ą┐ąĄčĆąĖč乥čĆąĖąĖ čü čłą░ą│ąŠą╝ 0.9ą╝ą╝ ąĖ ąĖčģ ą╝ąŠąČąĮąŠ ąĖ ąĮą░ čüą▓ąŠčÄ ą┐ą╗ą░čéčā ą▓ ą┐ąŠą┤ąĄą╗ą║čā ą┐ąŠčüčéą░ą▓ąĖčéčī, ą┤ą░ąČąĄ ąĄčüą╗ąĖ Bluetooth ąĮąĄ ąĮčāąČąĄąĮ. ąóą░ą╝ ąĖ ąŠą▒ą▓čÅąĘą║ą░ ą▓čüčÅ čāąČąĄ ąĖą╝ąĄąĄčéčüčÅ. ą×ą┤ąĮą░ą║ąŠ, čüč鹊čÅčé ąŠąĮąĖ 15-16$. ą£ąŠąČąĮąŠ ąĖ ą┐čĆąĖą╝ąĄąĮąĖčéčī, ąĄčüą╗ąĖ ą┤ą▓ąŠą╣ąĮąŠąĄ čÅą┤čĆąŠ ąĮčāąČąĮąŠ. ąöą╗čÅ ą╝ąŠąĖčģ čåąĄą╗ąĄą╣ ą┤ą▓ąŠą╣ąĮąŠąĄ čÅą┤čĆąŠ ąĖą╝ąĄąĄčé čüą╝čŗčüą╗ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą▒ąĄčüą┐čĆąŠą▓ąŠą┤ą║ąĖ - ąĮą░ ąŠą┤ąĮąŠą╝ ąĖąĘ ąĮąĖčģ čüč鹥ą║ ą┐čĆąŠč鹊ą║ąŠą╗ą░, ąĮą░ ą┤čĆčāą│ąŠą╝ ą▓čüčæ ąŠčüčéą░ą╗čīąĮąŠąĄ. ST č鹊ąČąĄ ą┐ąŠ čéą░ą║ąŠą╝čā ą┐čāčéąĖ ą┐ąŠčłą╗ąĖ, ą┤ą░ ąĖ ą┤čĆčāą│ąĖąĄ čäąĖčĆą╝čŗ č鹊ąČąĄ. ąśąĮą░č湥 čüąŠ čüą║ąŠą╗čī-ąĮąĖą▒čāą┤čī čüą╗ąŠąČąĮčŗą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝ + čüč鹥ą║ ą┐čĆąĖčģąŠą┤ąĖčéčüčÅ čüčéą░ą▓ąĖčéčī RTOS, ąĖ, ą▓ ąŠą▒čēąĄą╝, ą┐ąŠą║ą░ čéą░ą║ ą╝ąŠąČąĮąŠ ąČąĖčéčī. ą£ąŠąČąĄčé ąÆą░ą╝ ą▓ ą┐ą╗ą░ąĮąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ąĮą░ čéčĆčæčģ-čÅą┤ąĄčĆąĮčŗąĄ ąĖąĘą┤ąĄą╗ąĖčÅ ą▓ ą╗ąĖąĮąĄą╣ą║ąĄ LPC ąŠčé NXP ąĖą╗ąĖ ą┐čĆąŠčüč鹊 ą║ą░ą║ąĖąĄ-ąĮąĖą▒čāčéčī ą▒čŗčüčéčĆčŗąĄ ąĖąĘ čüąĄčĆąĖąĖ STM32F4/F7? ą¤ąŠą╝ąĮčÄ ą┤ą╗čÅ čŹč鹊ą╣ ą║ą░ą╝ąĄčĆčŗ ąĮą░ ą╝ą░čłąĖąĮą║ą░čģ čü čāčüą┐ąĄčģąŠą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖčüčī ąĮąĄ čüą╗ąĖčłą║ąŠą╝ čłčāčüčéčĆčŗąĄ ą┐ą╗ą░čéčŗ ą£ąÜ ąŠčé Freescale. ąÜą░ą║ ąĮąĄ čüčéčĆą░ąĮąĮąŠ, #2-56 ą┐čĆąĖą╝ąĄčĆąĮąŠ ą▓ 2 čĆą░ąĘą░ ą┤ąĄčłąĄą▓ą╗ąĄ ąĘą┤ąĄčüčī, č湥ą╝ ą£2. ą¤ąŠ ą┤ąĖą░ą╝ąĄčéčĆčā ą▒ąŠą╗čéčŗ ą┐čĆąĖą╝ąĄčĆąĮąŠ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗąĄ, ąĮąŠ ą│ą░ą╣ą║ąĖ čā ą┤čÄą╣ą╝ąŠą▓čŗčģ ą▒ąŠą╗ąĄąĄ "ą╝čÅčüąĖčüčéčŗąĄ". ąöčāą╝ą░čÄ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī ą£1.6 ąĖą╗ąĖ ą┤ą░ąČąĄ #0-80. ą×ąĮąĖ ąĘą░ą╝ąĄčéąĮąŠ ą┤ąŠčĆąŠąČąĄ, ąĮąŠ ąĘą░č鹊 ąĮą░ čåąĄą╗čŗą╣ ą╝ą╝ ą┐ąŠ ą┤ąĖą░ą╝ąĄčéčĆčā ą╝ąĄąĮčīčłąĄ. ąśąĮąŠą│ą┤ą░ ąĖą╝ąĄąĄčé čüą╝čŗčüą╗. ąÉ 30000rpm ą╝ąŠč鹊čĆ - čŹč鹊 ąĮąĄ ą┤ą╗čÅ čĆąŠą▒ąŠčéą░, ąĮą░ą▓ąĄčĆąĮąŠąĄ(?) ąØą░ą▓ąĄčĆąĮčÅą║ą░ ąÆčŗ čāąČąĄ ą▓čüčæ ą┐čĆąŠčüčćąĖčéą░ą╗ąĖ, ąĮąŠ ąĮąĄčāąČąĄą╗ąĖ ą┤ą╗čÅ ąŠčéčĆą░ą▒ąŠčéą║ąĖ čüąĖą│ąĮą░ą╗ąŠą▓ ąŠčé ą┤ą░čéčćąĖą║ąŠą▓ ą║ąŠą╗čæčü čĆąŠą▒ąŠčéą░, čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą┐ąŠ ą╗ąĖąĮąĖąĖ, ąĮąĄ čģą▓ą░čéą░ąĄčé 16-ą▒ąĖčé čéą░ą╣ą╝ąĄčĆą░? ą£ąŠąČąĄčé ą╝ąŠąČąĮąŠ čüąĮąĖąĘąĖčéčī čćą░čüč鹊čéčā čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ ą▒ąĄąĘ ą┐ąŠč鹥čĆąĖ č鹊čćąĮąŠčüčéąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą║ąŠą╗čæčü ąĖ ą▓ą┐ąĖčüą░čéčīčüčÅ ą▓ 16 ą▒ąĖčé ą▒ąĄąĘ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖą╣? ąśą╗ąĖ ą╝ąŠąČąĄčé ą╝ąŠąČąĮąŠ ą┐ąŠą┤ąĄą╗ąĖčéčī čćą░čüč鹊čéčā čüąĖą│ąĮą░ą╗ą░ ąŠčé ą┤ą░čéčćąĖą║ą░ ą▓ 2 čĆą░ąĘą░ ąĖ č鹥ą╝ čüą░ą╝čŗą╝ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ą║ą░ąČą┤čŗą╣ ą▓č鹊čĆąŠą╣ ąĄą│ąŠ čüąĖą│ąĮą░ą╗? ąĪ ąØąŠą▓čŗą╝ ąōąŠą┤ąŠą╝, ąĖ čāą┤ą░čćąĖ ąĮą░ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅčģ! |
|
| ąÉą▓č鹊čĆ: | uldemir [ ąĪą▒ čÅąĮą▓ 04, 2020 12:03:03 ] |
| ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: | Re: RSLK ąŠčé TI (Robotic System Learning Kit) |
ąÆąŠčé ą┐čĆąŠ čéąĖą┐čŗ ą║ąŠčĆą┐čāčüąŠą▓ ą┤ą╗čÅ PSoC6 čÅ ąĖ ąĮąĄ ą┐ąŠčüą╝ąŠčéčĆąĄą╗. ąØčā čŹč鹊 ą┐čĆąŠčüč鹊 ą┤ą╗čÅ ąĖąĮč鹥čĆąĄčüą░. ą¤ąŠą║ą░ čü ąĮąĖą╝ ąĮąĖč湥ą│ąŠ ąĮąĄ ą┐ą╗ą░ąĮąĖčĆčāčÄ (ą║ą░ą║ ą▒čŗą╗ąŠ ąĖ čü MSP432). ąźąŠčćčā č鹊ą╗čīą║ąŠ ą┐ąŠą┤čüčéčĆą░čģąŠą▓ą░čéčīčüčÅ. ąÉ č鹊 ą┐ąŠą┐čŗčéą░ą╗čüčÅ čŹą║čüčéčĆą░ą┐ąŠą╗ąĖčĆąŠą▓ą░čéčī ąŠą▒čĆą░ą▒ąŠčéą║čā 8 č乊č鹊 čüąĄąĮčüąŠčĆąŠą▓ ąĮą░ 128 čüąĄąĮčüąŠčĆąŠą▓ ą¤ąŚąĪ ą╗ąĖąĮąĄą╣ą║ąĖ ąĖ, ą▓ąŠąĘąĮąĖą║ą╗ąŠ čüčéčĆą░ąĮąĮąŠąĄ ą┐čĆąĄą┤čćčāą▓čüčéą▓ąĖąĄ. ą×ąČąĖą┤ą░čÄ ą▒ąŠą╗čīčłčāčÄ ą┐čĆąŠą▒ą╗ąĄą╝čā ą▓ čĆą░ąĘą╗ąĖčćąĖąĖ ąŠčüą▓ąĄčēąĄąĮąĮąŠčüčéąĖ "ą║ą░ą┤čĆą░". ąØą░ą┤ąŠ ą▒čāą┤ąĄčé, ą▓ąĄčĆąŠčÅčéąĮąŠ, č湥čĆąĄąĘ ą┐ąĄčĆą▓čŗąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĮčŗąĄ ą║ą░čĆčéąĖąĮą║čā ą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī. ąØąŠ čŹč鹊 ą┐ąŠąĘąČąĄ. 30 000 rpm - čŹč鹊 ąĖą╝ąĄąĮąĮąŠ ą╝ąŠč鹊čĆ čĆąŠą▒ąŠčéą░. ą¦č鹊 ą▓ RSLK, čćč鹊 ą▓ LineFollower. ąØčā, ą╝ąŠąČąĄčé, ą▓ RSLK čćčāčéčī ą┐ąŠ ą╝ąĄą┤ą╗ąĄąĮąĮąĄąĄ. ąÜąŠą│ą┤ą░ ą┤ąĄą╗ą░ą╗ 17 ą╗ą░ą▒.čĆą░ą▒ąŠčéčā ąĖ ą┤ą▓ąĖą│ą░č鹥ą╗čī ą▒ąĄčüą║ąŠąĮčéčĆąŠą╗čīąĮąŠ čĆą░ąĘą│ąŠąĮčÅą╗čüčÅ, čā ą╝ąĄąĮčÅ ą┐ąŠą║ą░ąĘčŗą▓ą░ą╗ąŠ ą▒ąŠą╗ąĄąĄ 220 rpm (ą║ąŠą╗ąĄčüą░), čćč鹊 čü čāč湥č鹊ą╝ čĆąĄą┤čāą║č鹊čĆą░ 1:120 ą┤ą░čæčé 26000 rpm ą╝ąŠč鹊čĆą░. ąÆ LineFollower ąĖčüą┐ąŠą╗čīąĘčāčÄ ą╝ąŠč鹊čĆčŗ Pololu micro metal gear ąĖ, ąĄčüą╗ąĖ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ąĮą░ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ, č鹊 ą╝ąŠčēąĮčŗąĄ ą╝ąŠč鹊čĆčŗ (HP - High Power) ąĖą╝ąĄčÄčé ąŠčé 31000 ą┤ąŠ 33000 rpm. ąØąŠ ą▓ ą┤ą░ąĮąĮąŠą╝ čüą╗čāčćą░ąĄ ą┐čĆąŠą▒ą╗ąĄą╝čā ą▓čŗąĘčŗą▓ą░ąĄčé ąĮąĖąČąĮčÅčÅ ą│čĆą░ąĮąĖčåą░. ą¤ąŠ ą║ąĮąĖąČą║ąĄ ąÆą░ą╗ą▓ą░ąĮąŠ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ (ąĖ čā ą╝ąĄąĮčÅ ą┐ąŠą╗čāčćąĖą╗ąĖčüčī ą┐ąŠčģąŠąČąĖąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ), čćč鹊 ą┐ąŠčüč鹊čÅąĮąĮą░čÅ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ (čü čĆąĄą┤čāą║č鹊čĆąŠą╝ ąĖ ą║ąŠą╗ąĄčüąŠą╝) ąŠą║ąŠą╗ąŠ 100ą╝čü. ąĪą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ, čćą░čüč鹊čéą░ ą▓čŗąĘąŠą▓ą░ ą¤ąś ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ąĘ ą▓ 10 ą▒ąŠą╗čīčłąĄ - ą▓čŗą▒ąĖčĆą░ąĄą╝ ąŠą║ąŠą╗ąŠ 10ą╝čü. ąöą░ą╗ąĄąĄ ą▓čĆąĄą╝čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┐ąĄčĆąĖąŠą┤ą░ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ąĖą╝ą┐čāą╗čīčüąŠą▓ čéą░čģąŠą┤ą░čéčćąĖą║ą░. ą¢ąĄą╗ą░č鹥ą╗čīąĮąŠ, ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą¤ąś ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čüą▓ąĄąČąĖą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ, ą┐ąŠčŹč鹊ą╝čā 12ą£ąōčå ąĖ 16 ą▒ąĖčé ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čÄčé 5.461ą╝čü - ą▓ą┐ąŠą╗ąĮąĄ ą┐čĆąĖąĄą╝ą╗ąĄą╝čŗą╣ ą▓ą░čĆąĖą░ąĮčé. ąŻą╝ąĄąĮčīčłą░čéčī čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī ąĮąĄą╗čīąĘčÅ, čéą░ą║ ą║ą░ą║ rpm ą║ ą┐ąĄčĆąĖąŠą┤čā - ąŠą▒čĆą░čéąĮą░čÅ čäčāąĮą║čåąĖčÅ ąĖ ą┐čĆąĖ ą╝ą░ą╗čŗčģ ąĘąĮą░č湥ąĮąĖčÅčģ čłą░ą│ąĖ ą▒čāą┤čāčé ąŠč湥ąĮčī ą│čĆčāą▒čŗą╝ąĖ. ąÆąŠčé ąĖ čüąĄą╣čćą░čü ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąŠčé 8000 ą┤ąŠ 65535. ąÆ ą┐čĆąĄą┤čŗą┤čāčēąĄą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ čÅ ąĮąĄ ą▓ąĄčĆąĮąŠ ą▓čŗą▒čĆą░ą╗ čćą░čüč鹊čéčā. 3 ąÜą│čå čéą░ą╝ ąĮąĄ ą▒čāą┤ąĄčé. ą×ą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 ąĮąĄčüą╝ąŠčéčĆčÅ ąĮą░ č鹊 čćč鹊 ą╝ą░ą│ąĮąĖčéąĮčŗą╣ ą┤ąĖčüą║ 6-ą┐ąŠą╗čÄčüąĮčŗą╣, ą┤ą░čéčćąĖą║ąĖ ą┤ą░čÄčé č鹊ą╗čīą║ąŠ 3 ąĖą╝ą┐čāą╗čīčüą░ ąĮą░ ąŠą▒ąŠčĆąŠčé. ąØą░ą▓ąĄčĆąĮąŠąĄ, čüčĆą░ą▒ą░čéčŗą▓ą░čÄčé č鹊ą╗čīą║ąŠ ąĮą░ ąŠą┤ąĮąŠ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝ą░ą│ąĮąĖčéąĮčŗčģ ą╗ąĖąĮąĖą╣, ą░ ąĮą░ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠąĄ - ąĮąĄ čüčĆą░ą▒ą░čéčŗą▓ą░čÄčé. ąØčā čéą░ą║ ą▓ąŠčé, čćč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ - 65535. ąŁč鹊 5.461 ą╝čü - ą┐ąĄčĆąĖąŠą┤ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ąĖą╝ą┐čāą╗čīčüąŠą▓. ąóą░ą║ ą║ą░ą║ ąĮą░ ąŠą▒ąŠčĆąŠčé ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ą┐čĆąĖčģąŠą┤ąĖčéčüčÅ 3 ąĖą╝ą┐čāą╗čīčüą░, ąĘąĮą░čćąĖčé ąŠą┤ąĖąĮ ąŠą▒ąŠčĆąŠčé ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąĘą░ 16.384 ą╝čü. ąØčā ąĖ ą┤ąĄą╗ąĖą╝ 60 čüąĄą║čāąĮą┤ ąĮą░ 16.384 = 3662 ąŠą▒ąŠčĆąŠčéą░ ą▓ ą╝ąĖąĮčāčéčā. ąŁč鹊 ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗąĄ ąŠą▒ąŠčĆąŠčéčŗ. ąŻ čĆąŠą▒ąŠčéą░ ą┤ą╗čÅ Line Follower ą┤ą▓ąĖą│ą░č鹥ą╗čī ąĖą╝ąĄąĄčé čĆąĄą┤čāą║č鹊čĆ 1:10 - ąĘąĮą░čćąĖčé ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗąĄ ąŠą▒ąŠčĆąŠčéčŗ 366 rpm, čćč鹊 ą┐čĆąĖ ą┤ą╗ąĖąĮąĄ ąŠą║čĆčāąČąĮąŠčüčéąĖ ą║ąŠą╗ąĄčüą░ ą▓ 66 ą╝ą╝ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čüą║ąŠčĆąŠčüčéąĖ ąŠą║ąŠą╗ąŠ 40 čüą╝/čü. ą£ąĮąŠą│ąŠą▓ą░č鹊. (čā RSLK čŹčéąĖ ąČąĄ ąŠą▒ąŠčĆąŠčéčŗ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ą┐čĆąĖ čĆąĄą┤čāą║č鹊čĆąĄ 1:120 ąĖ ąŠą║čĆčāąČąĮąŠčüčéąĖ ą║ąŠą╗ąĄčüą░ 220 ą╝ą╝ ą┤ą░čÄčé, čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ, 31 rpm ąĖ 10 čüą╝/čü (ą│čĆčāą▒ąŠ)). ąöą╗čÅ ąŠą┐čāčüą║ą░ąĮąĖčÅ ąĮąĖąČąĮąĄą╣ ą│čĆą░ąĮąĖčåčŗ, ąĮą░ą┤ąŠ ąĖą╗ąĖ čāą▓ąĄą╗ąĖčćąĖą▓ą░čéčī ą▓čĆąĄą╝čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ, čćč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ čāą▓ąĄą╗ąĖč湥ąĮąĖčÄ ą▓čĆąĄą╝ąĄąĮąĖ čĆąĄą░ą║čåąĖąĖ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ, ąĖą╗ąĖ čāą▓ąĄą╗ąĖčćąĖčéčī čćąĖčüą╗ąŠ čüąŠą▒čŗčéąĖą╣ ąĮą░ ąŠą┤ąĖąĮ ąŠą▒ąŠčĆąŠčé. ąÆč鹊čĆąŠą╣ ą▓ą░čĆąĖą░ąĮčé ą┤ą╗čÅ RSLK č鹊ąČąĄ ąĮąĄ ąŠčüąŠą▒ąŠ ą┐čĆąĖąĄą╝ą╗ąĄą╝, čéą░ą║ ą║ą░ą║ ą║ą░ąČą┤ąŠąĄ čüąŠą▒čŗčéąĖąĄ ą┤ąŠą╗ąČąĮąŠ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ - ą░ čŹč鹊 ą▓čĆąĄą╝čÅ! ąś ą▓ąŠčé ąĄčüą╗ąĖ čüąĄą╣čćą░čü čā ą╝ąĄąĮčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╝ąŠą│čāčé ą▓čŗąĘčŗą▓ą░čéčīčüčÅ čü ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čćą░čüč鹊č鹊ą╣ 1.5 ą║ąōčå, č鹊 ą┐čĆąĖ čāą▓ąĄą╗ąĖč湥ąĮąĖąĖ - čŹčéą░ čćą░čüč鹊čéą░ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ čāą▓ąĄą╗ąĖčćąĖčéčüčÅ. ąÆ PSoC, čéą░ą║ ą║ą░ą║ ą▓čüčæ čŹč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą░ą┐ą┐ą░čĆą░čéąĮąŠ, ą┐čĆąŠą▒ą╗ąĄą╝ ąĮąĖą║ą░ą║ąĖčģ ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą▓čŗąĘą▓ą░čéčī. ą¤čĆąŠą▒ą╗ąĄą╝čā ą▓čŗąĘčŗą▓ą░ąĄčé č鹊, čćč鹊 ą┤ą╗čÅ čāą▓ąĄą╗ąĖč湥ąĮąĖčÅ čćąĖčüą╗ą░ ąĖą╝ą┐čāą╗čīčüąŠą▓, ą╝ąŠąČąĮąŠ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čüą╗ąĄą┤čāčÄčēąĖąĄ ą╝ąĄčĆąŠą┐čĆąĖčÅčéąĖčÅ: ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░čéčī ąĮąĄ č鹊ą╗čīą║ąŠ čäčĆąŠąĮčé, ąĮąŠ ąĖ čüą┐ą░ą┤; ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓č鹊čĆąŠą╣ ą║ą░ąĮą░ą╗ č鹊ąČąĄ. ąØąŠ čéčāčé čÅ ą┐čĆąĖą║ąĖąĮčāą╗, čćč鹊 ąĄčüą╗ąĖ čŹčéąĖ ąŠą▒ą░ čüąĖą│ąĮą░ą╗ą░ čü 菹Įą║ąŠą┤ąĄčĆą░ ąŠą▒čŖąĄą┤ąĖąĮąĖčéčī č湥čĆąĄąĘ ąĖčüą║ą╗čÄčćą░čÄčēąĄąĄ ąśąøąś, čÅ ą╝ąŠą│čā ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐ąŠą╗čāč湥ąĮąĮčŗąĄ čäčĆąŠąĮčéčŗ ą┤ą╗čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ąĖąĮč鹥čĆą▓ą░ą╗ą░ ą╝ąĄąČą┤čā čäčĆąŠąĮč鹊ą╝ ąĖ čüą┐ą░ą┤ąŠą╝ ąŠą┤ąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ąĖą╗ąĖ ąĄčüą╗ąĖ ą║ąŠąĮčéčĆąŠą╗ąĖčĆąŠą▓ą░čéčī ąĄčēąĄ ąĖ čüą┐ą░ą┤čŗ, č鹊 ą┐ąŠą╗čāčćąĖčéčī ą▓čüčÄ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ čĆą░ąĘčĆąĄčłą░čÄčēčāčÄ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī 菹Įą║ąŠą┤ąĄčĆą░ - 12 cpr (ąĖą╝ą┐čāą╗čīčüąŠą▓ ąĮą░ ąŠą▒ąŠčĆąŠčé). ą¤čĆą░ą▓ą┤ą░, čü ąŠčéą╗ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄą╝ čüą┐ą░ą┤ąŠą▓ ąĄčüčéčī ą┐čĆąŠą▒ą╗ąĄą╝ą░. ąĢčüą╗ąĖ EdgeDetect ą▒ąĄąĘ ą┐čĆąŠą▒ą╗ąĄą╝ čŹč鹊čé čĆąĄąČąĖą╝ ą▓ą║ą╗čÄčćą░ąĄčéčüčÅ, č鹊 čā čéą░ą╣ą╝ąĄčĆą░ ą▓ čĆąĄąČąĖą╝ąĄ Fixed Function čéą░ą║ąŠą╣ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąĮąĄčé. ą×ąĮą░ ąĄčüčéčī č鹊ą╗čīą║ąŠ čā čéą░ą╣ą╝ąĄčĆą░ ą▓ čĆąĄąČąĖą╝ąĄ UDB. ąØčā čćč鹊 ąČ, ą┐ąŠą┐čĆąŠą▒čāčÄ ąĮą░ ą┐čĆąŠą▒ąĮąŠą╣ ą┐ą╗ą░čéą║ąĄ ą┐čĆąŠą▓ąĄčĆąĖčéčī ą║ą░ą║ čŹč鹊čé čĆąĄąČąĖą╝ ą┐ąŠą╣ą┤čæčé. ąÉ č鹥ą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝, čüąĮąŠą▓ą░ ą┐ąŠą╣ą╝ą░ą╗ ą┐ą░čĆčā čĆą░ąĘ čĆąŠą▒ąŠčéą░ ąĮą░ č鹊ą╝, čćč鹊 ąŠąĮ ąĘą░ą▒ą╗čāą┤ąĖą╗čüčÅ ą▓ ą╗ą░ą▒ąĖčĆąĖąĮč鹥. ąóą░ą║ ą║ą░ą║ čÅ čāąČąĄ ą▒čŗą╗ čüą┤ąĄą╗ą░ą▓čłąĖ ąČčāčĆąĮą░ą╗ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠą║ą░ąĘą░ąĮąĖą╣ čüąĄąĮčüąŠčĆąŠą▓ ą╗ąĖąĮąĖąĖ, čé.ąĄ. čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ čüąŠą▒ąĖčĆą░čÄčéčüčÅ ąĖ ą┤ą░ąČąĄ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą▓ąŠ čäą╗ąĄčł-ą┐ą░ą╝čÅčéčī. ąØąŠ ą▓ąŠčé čāą┤ąŠą▒ąĮąŠą│ąŠ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░ ą┤ą╗čÅ ą┐čĆąŠčüą╝ąŠčéčĆą░ čéą░ą║ ąĖ ąĮąĄčé. ąÆąŠčé ąĖ čĆąĄčłąĖą╗ ąĮąĄą╝ąĮąŠą│ąŠ ą┐ąŠčĆąĄčłą░čéčī čŹč鹊čé ą▓ąŠą┐čĆąŠčü. ąÆąŠ-ą┐ąĄčĆą▓čŗčģ ąĖąĘą╝ąĄąĮąĖą╗ čāčüą╗ąŠą▓ąĖąĄ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą╗ąŠą│-čäą░ą╣ą╗ą░. ąóąĄą┐ąĄčĆčī ąŠąĮ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ąĄčüą╗ąĖ čĆąŠą▒ąŠčé ąĘą░ą▓ąĄčĆčłą░ąĄčé čĆą░ą▒ąŠčéčā čü ąŠčłąĖą▒ą║ąŠą╣. ąÉ ą▓ąŠ ą▓č鹊čĆčŗčģ, ą║ čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆą░čÅ č湥čĆąĄąĘ UART čüą╗ąĖą▓ą░ąĄčé ą║ą░čĆčéčā, ą┤ąŠą▒ą░ą▓ąĖą╗ ąĖ ą┐ąĄčĆąĄą┤ą░čćčā ą╗ąŠą│-čäą░ą╣ą╗ą░ ą▓ "ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆąŠą▓ą░ąĮąĮąŠą╝" ą▓ąĖą┤ąĄ: ąĪą┐ąŠą╣ą╗ąĄčƹܹŠą┤: 17.2125,...**..., ,Segment ą¤ąĄčĆą▓ąŠąĄ ą┐ąŠą╗ąĄ - ą▓čĆąĄą╝čÅ ą▓ čüąĄą║čāąĮą┤ą░čģ, ą▓č鹊čĆąŠąĄ ą┐ąŠą╗ąĄ - ą┐ąŠą║ą░ąĘą░ąĮąĖčÅ čüąĄąĮčüąŠčĆą░ ą╗ąĖąĮąĖąĖ: "*" - č湥čĆąĮąŠąĄ, "." - ą▒ąĄą╗ąŠąĄ, ąĘą░č鹥ą╝ čäą╗ą░ą│ąĖ ąĮą░ą╣ą┤ąĄąĮąĮčŗčģ ą┐ąŠą▓ąŠčĆąŠč鹊ą▓: ą╗ąĄą▓čŗą╣, ą┐čĆčÅą╝ąŠ, ą┐čĆą░ą▓čŗą╣ ąĖ ą▓ ą║ąŠąĮčåąĄ ąĖą╝čÅ čäčāąĮą║čåąĖąĖ ą│ą┤ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ: ą▓ ą│ą╗ą░ą▓ąĮąŠą╣ Solve_Maze ąĖą╗ąĖ ą▓ čäčāąĮą║čåąĖčÅčģ Run_Segment ąĖą╗ąĖ Turn. ąØą░ ą┐ąŠą║ą░ąĘą░ąĮąĮąŠą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą▓ąĖą┤ąĮąŠ, čćč鹊 čĆąŠą▒ąŠčé ąĖą┤čæčé ą┐ąŠ čüąĄą│ą╝ąĄąĮčéčā ą┤ąŠą▓ąŠą╗čīąĮąŠ čĆąŠą▓ąĮąŠ - ą╗ąĖąĮąĖčÅ ą┐ąŠą┤ čåąĄąĮčéčĆą░ą╗čīąĮčŗą╝ąĖ ą┤ą░čéčćąĖą║ą░ą╝ąĖ, ą┐ąŠč鹊ą╝ ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ čćč鹊-č鹊 č湥čĆąĮąŠąĄ čü ą┐čĆą░ą▓ąŠą│ąŠ ą║čĆą░čÅ ąĖ ą║ąŠą│ą┤ą░ čŹč鹊 ąĘą░čäąĖą║čüąĖčĆąŠą▓ą░ąĮąŠ ą┤ą▓ą░ ąŠčéčüč湥čéą░ ą┐ąŠą┤čĆčÅą┤ čäčāąĮą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą▓ ą│ą╗ą░ą▓ąĮčāčÄ čäčāąĮą║čåąĖčÄ Solve_Maze ąĮą░ 17.23 čüąĄą║čāąĮą┤ąĄ. ą×ąĮą░ ąĮą░čćąĖąĮą░ąĄčé ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ čāąĘą╗ą░. ąĮą░ 17,2650 ą┐čĆąŠą┐ą░ą╗ čüąĖą│ąĮą░ą╗ čü ą▒ąŠą║ąŠą▓ąŠą│ąŠ ą┤ą░čéčćąĖą║ą░, ąĮąŠ čĆąŠą▒ąŠčé ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ą┤ą▓ąĖą│ą░čéčīčüčÅ ąĄčēąĄ 10 ąŠčéčüč湥č鹊ą▓, čćč鹊ą▒čŗ ą▓čŗčÅčüąĮąĖčéčī, ąĄčüčéčī čģąŠą┤ ą┐čĆčÅą╝ąŠ ąĖą╗ąĖ ąĮąĄčé (čģą╝, čéčāčé ą▓ąĖą┤ąĮąŠ, čćč鹊 čÅ ą╝ąŠą│čā ą▒čŗčüčéčĆąĄąĄ ąŠčéą║ą░ąĘą░čéčīčüčÅ ąŠčé ą┐ąŠąĖčüą║ą░, ąĄčüą╗ąĖ čŹč鹊 ą┐ąŠą▓ąŠčĆąŠčé, ą░ ąĮąĄ T-ąŠą▒čĆą░ąĘąĮčŗą╣ ą┐ąĄčĆąĄą║čĆčæčüč鹊ą║). ąś č鹊ą│ą┤ą░, ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĮą░ąĘąĮą░čćą░ąĄčé ąĮąŠą╝ąĄčĆ čŹč鹊ą╝čā čāąĘą╗čā - 15. ą¤čĆą░ą▓ą┤ą░, ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ čéčāčé čāą║ą░ąĘą░ąĮčŗ ąĮčāą╗ąĄą▓čŗąĄ, ą┐ąŠč鹊ą╝čā ą║ą░ą║ čÅ čŹč鹊 ą┤ąŠą▒ą░ą▓ąĖą╗ ą┐ąŠąĘąČąĄ ąĖ čŹč鹊ą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą▓ ą╗ąŠą│-čäą░ą╣ą╗ąĄ ąĮąĄčé. ąöą░ą╗ąĄąĄ, čĆąŠą▒ąŠčé ą┤ą▓ąĖąČąĄčéčüčÅ ąĄčēąĄ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą▓čĆąĄą╝čÅ ą▓ą┐ąĄčĆąĄą┤, čćč鹊ą▒čŗ čåąĄąĮčéčĆ čĆąŠą▒ąŠčéą░ ąŠą║ą░ąĘą░ą╗čüčÅ ąĮą░ą┤ čåąĄąĮčéčĆąŠą╝ ą┐ąĄčĆąĄą║čĆčæčüčéą║ą░(ą┐ąŠą▓ąŠčĆąŠčéą░ ąĖą╗ąĖ čéčāą┐ąĖą║ą░) ąĖ ąĮą░ 17,345 čüąĄą║čāąĮą┤ąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąŠčéą┤ą░čæčéčüčÅ čäčāąĮą║čåąĖąĖ ą┐ąŠą▓ąŠčĆąŠčéą░, ą║ąŠč鹊čĆą░čÅ ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą┐ąŠą▓ąŠčĆąŠčé.17.2150,...**..., ,Segment 17.2175,...**..., ,Segment 17.2200,...**..., ,Segment 17.2225,...**..., ,Segment 17.2250,...**.**, ,Segment 17.2275,...*****, ,Segment 17.2300,...*****, R,Solve 17.2325,...*****, R,Solve 17.2350,...*****, R,Solve 17.2375,...*****, R,Solve 17.2400,...*****, R,Solve 17.2425,...*****, R,Solve 17.2450,...*****, R,Solve 17.2475,...*****, R,Solve 17.2500,...*****, R,Solve 17.2525,...*****, R,Solve 17.2550,...*****, R,Solve 17.2575,...*****, R,Solve 17.2600,....****, R,Solve 17.2625,.....*.*, R,Solve 17.2650,........, R,Solve 17.2675,........, R,Solve 17.2700,........, R,Solve 17.2725,........, R,Solve 17.2750,........, R,Solve 17.2775,........, R,Solve 17.2800,........, R,Solve 17.2825,........, R,Solve 17.2850,........, R,Solve 17.2875,........, R,Solve 17.2900,........, R,Solve Current index = 15 , Coord X = 0 , Coord Y = 0 17.2925,........, R,Solve 17.2950,........, R,Solve 17.2975,........, R,Solve 17.3000,........, R,Solve 17.3025,........, R,Solve 17.3050,........, R,Solve 17.3075,........, R,Solve 17.3100,........, R,Solve 17.3125,........, R,Solve 17.3150,........, R,Solve 17.3175,........, R,Solve 17.3200,........, R,Solve 17.3225,........, R,Solve 17.3250,........, R,Solve 17.3275,........, R,Solve 17.3300,........, R,Solve 17.3325,........, R,Solve 17.3350,........, R,Solve 17.3375,........, R,Solve 17.3400,........, R,Solve 17.3425,........, R,Solve 17.3450,........, ,Turn ąøąŠą│ ą┐ąĖčłąĄčéčüčÅ ą┤ąŠ, ą┐čĆąĖą╝ąĄčĆąĮąŠ, 20 čüąĄą║čāąĮą┤čŗ. čÅ ą▓čŗą┤ąĄą╗ąĖą╗ ąĮą░ čŹč鹊 ą┤ąĄą╗ąŠ 16ąÜ ą┐ą░ą╝čÅčéąĖ. ą┐čĆą░ą▓ą┤ą░, ą▓ ą║ąŠąĮčåąĄ ąĖą┤čæčé ą║ą░ą║ą░čÅ-č鹊 ą▒ąĄą╗ąĖą▒ąĄčĆą┤ą░ ąĖ ąĮąĄ ą╝ąŠą│čā ą┐ąŠąĮčÅčéčī ąŠčéą║čāą┤ą░ čŹč鹊čé ą╝čāčüąŠčĆ ą▓ąĘčÅą╗čüčÅ. ą£ąŠąČąĄčé, ąŠą┐čÅčéčī čüč鹥ą║ ąĮą░ąĄąĘąČą░ąĄčé ą║čāą┤ą░ ąĮąĄ ąĮą░ą┤ąŠ? ąĪąŠą▒čüčéą▓ąĄąĮąĮąŠ, ą┐čĆąĖčćąĖąĮą░ ą▓ č鹊ą╝, čćč鹊 ąŠą▒ą░ čĆąŠą▒ąŠčéą░ čā ą╝ąĄąĮčÅ ą▓ą░ą╗ąĖą╗ąĖčüčī ą▓ GPF ą▓ č鹊ą╝, čćč鹊 čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ ą▒čŗą╗ ą▒ąŠą╗čīčłąĄ, č湥ą╝ ąÜąĄą╣ą╗ ą┐ąŠą┤ ąĮąĄą│ąŠ ą▓čŗą┤ąĄą╗čÅą╗. ąÉ ą▓čŗą┤ąĄą╗čÅąĄčé ąŠąĮ ą▓čüąĄą│ąŠ 512 ą▒ą░ą╣čé. ąś čüą░ą╝ąŠąĄ ąŠą▒ąĖą┤ąĮąŠąĄ, čćč鹊 čüč鹥ą║ čĆą░ąĘą╝ąĄčēą░ąĄčéčüčÅ ąĮąĄ ą▓ ą║ąŠąĮčåąĄ ą×ąŚąŻ (ą║ą░ą║ ąŠą▒čŗčćąĮąŠ ą┐čĆąĖąĮčÅč鹊), ą░ čüčĆą░ąĘčā ąĘą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╣/čüčéą░čéąĖč湥čüą║ąŠą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ąŠčéčüčćąĖčéą░ą╗ 512 ą▒ą░ą╣čé ąĖ ą┐ąŠčüčéą░ą▓ąĖą╗ ą▓ąĄčĆčłąĖąĮčā čüč鹥ą║ą░. ąś ą┐ą╗ąĄą▓ą░čéčī, čćč鹊 čā ą╝ąĄąĮčÅ ą▓ ą║ą░ą║ąŠą╣-č鹊 čäčāąĮą║čåąĖąĖ ąĄčüčéčī ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖą╣ ą╝ą░čüčüąĖą▓ ąĮą░ ą║ąĖą╗ąŠą▒ą░ą╣čé, ą░ č鹊 ąĖ ąĮą░ 4. ąĪą┤ąĄą╗ą░ą╗, ą║ą░ą║ čĆąĄą║ąŠą╝ąĄąĮą┤ąŠą▓ą░ą╗ąĖ, ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ ą▓ ą╗ąĖčüčéąĖąĮą│ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠą▒ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ čüč鹥ą║ą░. ąĪąĄą╣čćą░čü čāč鹊ą┐čéą░ą╗ ą┐ą░ą╝čÅčéčī ąĖ ą┐ąŠą╗čāčćąĖą╗: ąÜąŠą┤: Maximum Stack Usage for __rt_entry_main 0x188 bytes. ąó.ąĄ. č鹥ą┐ąĄčĆčī ą┤ą░ąČąĄ ą▓ ą┤ąĄč乊ą╗čéąĮčŗąĄ 0x200, ą▓ąŠąĘą╝ąŠąČąĮąŠ, čāą║ą╗ą░ą┤čŗą▓ą░čÄčüčī, čéą░ą║ ą║ą░ą║ ą▓ čŹč鹊ą╝ čĆąĄą┐ąŠčĆč鹥 ąĮąĄ ą┐ąŠą║ą░ąĘą░ąĮąŠ, čüą║ąŠą╗čīą║ąŠ čüč鹥ą║ą░ ąŠčéčŖąĄą┤ą░čÄčé ą▓čŗąĘąŠą▓čŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąöą░ ąĖ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ ąĮąĄ ą╝ąŠąČąĄčé čŹč鹊ą│ąŠ čüą┤ąĄą╗ą░čéčī, čéą░ą║ ą║ą░ą║ ą▓ąŠ ą╝ąĮąŠą│ąĖčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅčģ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ CallBack. ąóą░ą║ čćč鹊 ąĮąĖą║č鹊 ąĮąĄ ąĘąĮą░ąĄčé, ą║čāą┤ą░ ąŠąĮąŠ ą┐ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÄ ą┤ą░ą╗čīčłąĄ ą┐ąŠą╣ą┤čæčé.Call chain for maximum stack usage: __rt_entry_main => main => solveMaze => show_number => update_display => lcddatawrite ą¤ąŠą┐čāčéąĮąŠ čāąĘąĮą░ą╗, čćč鹊 ą┤ąĄą╗ąĄąĮąĖąĄ ąĮą░ 0 ą▒ąĄąĘ čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ č鹥ą╗ąŠą┤ą▓ąĖąČąĄąĮąĖą╣ GPF ąĮąĄ ą▓čŗąĘčŗą▓ą░ąĄčé. ąØąŠ č鹥ą╝ ąĮąĄ ą╝ąĄąĮąĄąĄ, čüą┤ąĄą╗ą░ą╗ ą╝ą░ą╗ąĄąĮčīą║ąĖą╣ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ GPF, čćč鹊ą▒čŗ čÅ ąĘąĮą░ą╗, čćč鹊 čĆąŠą▒ąŠčé čéčāą┤ą░ ą▓ą▓ą░ą╗ąĖą╗čüčÅ - ą▓ą║ą╗čÄčćą░ąĄčé ą▒ąĄą╗čŗą╣ čåą▓ąĄčé ąĮą░ čéčĆčæčģčåą▓ąĄčéąĮąŠą╝ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąĄ ąĖ, ą│ą╗ą░ą▓ąĮąŠąĄ, ą▓čŗą║ą╗čÄčćą░ąĄčé ą┤ą▓ąĖą│ą░č鹥ą╗ąĖ. p.s. ąĢčēąĄ ą┐ąŠą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░ą╗ ą╗ąŠą│ąĖ, čĆąŠą▒ąŠčé čüą▒ąĖą╗čüčÅ ą┐ąŠč鹊ą╝čā, čćč鹊 ąŠą┤ąĖąĮ ąĖąĘ čüąĄą│ą╝ąĄąĮč鹊ą▓ą┐ąŠ ą║ąŠč鹊čĆąŠą╝čā ąĄčģą░ą╗ "ąĮą░ ą▓ąŠčüč鹊ą║" , ąĖąĘą╝ąĄčĆąĖą╗ ąĮą░ 28ą╝ą╝ ą┤ą╗ąĖąĮąĮąĄąĄ, č湥ą╝ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮčŗą╣, ą┐ąŠ ą║ąŠč鹊čĆąŠą╝čā ąĄčģą░ą╗ "ąĮą░ ąĘą░ą┐ą░ą┤". ąÉ ą│čĆą░ąĮąĖčåčā ą┤ąŠą┐čāčüą║ą░ čÅ ą┐ąŠčüčéą░ą▓ąĖą╗ 26ą╝ą╝. ąÆąŠčé ąĖ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ąŠą▒čĆą░ąĘąŠą▓ą░ą╗čüčÅ "ąĮąŠą▓čŗą╣" čāąĘąĄą╗. ą¤čĆą░ą▓ą┤ą░, čÅ ąĖąĘą╝ąĄčĆąĖą╗ ą╗ąĖąĮąĄą╣ą║ąŠą╣ - č鹊čé ą▓č鹊čĆąŠą╣, ąĮą░ 10ą╝ą╝ ą┤ą╗ąĖąĮąĮąĄąĄ čüą░ą╝ ą┐ąŠ čüąĄą▒ąĄ. ąØąŠ ąĘą░ą║ąŠąĮąŠą╝ąĄčĆąĮąŠčüčéčī ąĘą░ą╝ąĄčéąĖą╗, čćč鹊 ąĄčüą╗ąĖ čĆąŠą▒ąŠčé ą▓čģąŠą┤ąĖčé ąĮą░ čāčćą░čüč鹊ą║ ą┐ąŠčüą╗ąĄ ą┐ąŠą▓ąŠčĆąŠčéą░, čĆąĄąĘčāą╗čīčéą░čé ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čüąĄą│ą╝ąĄąĮčéą░ ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĮą░ 20-24 ą╝ą╝ ą▒ąŠą╗čīčłąĄ, č湥ą╝ ąĄčüą╗ąĖ ąŠąĮ ą┐ąŠą┐ą░ą┤ą░ąĄčé ąĮą░ čŹč鹊čé ąČąĄ čüąĄą│ą╝ąĄąĮčé ą┐čĆąŠą┤ąŠą╗ąČą░čÅ ą┐čĆčÅą╝ąŠą╗ąĖąĮąĄą╣ąĮąŠąĄ ą┤ą▓ąĖąČąĄąĮąĖąĄ. |
|
| ąÉą▓č鹊čĆ: | Ser60 [ ąĪčĆ čÅąĮą▓ 08, 2020 07:58:13 ] |
| ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: | Re: RSLK ąŠčé TI (Robotic System Learning Kit) |
ą¤čĆąĄą┤čüčéą░ą▓ąĖą╗ čüąĄą│ąŠą┤ąĮčÅ ą║ ą┐čāą▒ą╗ąĖą║ą░čåąĖąĖ ąĘą┤ąĄčüčī ą┐ąĄčĆą▓čŗąĄ 2 čćą░čüčéąĖ čüčéą░čéčīąĖ ą┐čĆąŠ Bluetooth, ą║ą░ą║ ąŠą▒ąĄčēą░ą╗. ąÆ ą┐čĆąŠčåąĄčüčüąĄ ąĮą░ą┐ąĖčüą░ąĮąĖčÅ čéčĆąĄčéčīąĄą╣ čćą░čüčéąĖ (ą┐ąŠčüą▓čÅčēąĄąĮą░ ąŠąĮą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ Bluetooth ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ą┐ąŠą┤ Micrium RTOS) čÅą▓ąĮąŠ ąŠčēčāčéąĖą╗, čćč鹊 ą┐čĆąĄąČą┤ąĄ čüą╗ąĄą┤čāąĄčé ą┐čĆąŠ čüą░ą╝čā čŹčéčā RTOS čüčéą░čéčīčÄ ąĮą░ą┐ąĖčüą░čéčī, čćč鹊ą▒čŗ ą▒čŗą╗ąŠ ą▓čüčæ ą┐ąŠąĮčÅčéąĮąŠ. ąÆ čĆčāčüčüą║ąŠ-čÅąĘčŗčćąĮąŠą╝ čüąĄą║č鹊čĆąĄ ąĮąĄąĖą▒ąŠą╗ąĄąĄ ą┐ąŠą┐čāą╗čÅčĆąĮą░ FreeRTOS, ą┐čĆąŠ ą║ąŠč鹊čĆčāčÄ ą║čāčćą░ čüčéą░č鹥ą╣, ą░ ą┐čĆąŠ čŹčéčā - ąĮąĄ ąĘąĮą░čÄ, ą╝ąŠąČąĄčé č鹊ąČąĄ ąĄčüčéčī ą│ą┤ąĄ-č鹊. ąĢčēčæ ą╝ąĄąĮčÅ č鹥čƹʹ░čÄčé čüą╝čāčéąĮčŗąĄ čüąŠą╝ąĮąĄąĮąĖčÅ, čćč鹊 ąÆčŗ ą╝ąŠąČąĄčé ą▒čāą┤ąĄč鹥 čćčāčéčī-ą╗ąĖ ąĮąĄ ąĄą┤ąĖąĮčüčéą▓ąĄąĮąĮčŗą╝, ą║ąŠą╝čā čŹč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĮč鹥čĆąĄčüąĮąŠ - čüčāąČčā ą┐ąŠ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ąĮą░ č乊čĆčāą╝ąĄ ą▓ ą┐ą╗ą░ąĮąĄ Bluetooth. ą¤ąŠčŹč鹊ą╝čā ą╝ąŠąČąĄčé ą▒čāą┤ąĄčé ą╗čāčćčłąĄ ąŠą┐čāą▒ą╗ąĖą║ąŠą▓ą░čéčī čéčĆąĄčéčīčÄ (ąĖ RTOS) čćą░čüčéčī ąĮą░ ą┤čĆčāą│ąŠą╝ čĆąĄčüčāčĆčüąĄ. ąÆą┐čĆąŠč湥ą╝, ą┐ąŠčüą╝ąŠčéčĆąĖą╝. |
|
| ąÉą▓č鹊čĆ: | uldemir [ ą¦čé čÅąĮą▓ 09, 2020 08:02:10 ] |
| ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: | Re: RSLK ąŠčé TI (Robotic System Learning Kit) |
ąĪ ąĮąĄč鹥čĆą┐ąĄąĮąĖąĄą╝ ąČą┤čā, ą║ąŠą│ą┤ą░ ąōą╗ą░ą▓ąĮčŗą╣ ąÜąŠčé ąŠč鹊ą╣ą┤čæčé ąŠčé ą┐čĆą░ąĘą┤ąĮąĖą║ąŠą▓ ąĖ ąĮą░ąČą╝čæčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░čÄčēčāčÄ ą║ąĮąŠą┐ą║čā. ąóąŠ čćč鹊 ąĮąĄčé ą░ą║čéąĖą▓ąĮąŠčüčéąĖ, ą▓ąŠąĘą╝ąŠąČąĮąŠ, čćč鹊 ą╝ąĮąŠą│ąĖąĄ ąĮąĄ ą┐ąĖčłčāčé, ąĮąŠ čćąĖčéą░čÄčé. ąĪ ą┤čĆčāą│ąŠą╣ čüč鹊čĆąŠąĮčŗ, ą┤ąŠą╗ąČąĮą░ ąĮą░ą▒čĆą░čéčīčüčÅ "ą║čĆąĖčéąĖč湥čüą║ą░čÅ ą╝ą░čüčüą░" ąĘąĮą░ąĮąĖą╣, čćč鹊ą▒čŗ ąĮą░čćą░ą╗ąĖ ą┐ąŠčÅą▓ą╗čÅčéčīčüčÅ ą▓ąŠą┐čĆąŠčüčŗ. ą£ąĮąĄ čŹčéčā ą║čĆąĖčéąĖč湥čüą║čāčÄ ą╝ą░čüčüčā ą┤ą░ą╗ąĖ ą▓ąŠčé čŹčéąĖ ą╗ą░ą▒ąŠčĆą░č鹊čĆąĮčŗąĄ čĆą░ą▒ąŠčéčŗ. ąĪąŠą▒čüčéą▓ąĄąĮąĮąŠ, čĆą░ąĘą▒ąĖčĆą░čÅčüčī čü 19 čĆą░ą▒ąŠč鹊ą╣, čā ą╝ąĄąĮčÅ ąĖ čüą╗čāčćąĖą╗čüčÅ ą┐čĆąŠčĆčŗą▓, čćč鹊 ąĮą░čćą░ą╗ ą┐ąŠąĮąĖą╝ą░čéčī ąĖ ą┐ąŠčÅą▓ąĖą╗ąĖčüčī ą▓ąŠą┐čĆąŠčüčŗ. ąÉ č鹊 čŹč鹊ą│ąŠ: ąĮčā ąĄčüčéčī "č湥čĆąĮčŗą╣ čÅčēąĖą║", ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ą║ąŠą╝ą┐ąŠčĆčé, ą┐čŗčéą░čÄčēąĖą╣čüčÅ ąĖąĘąŠą▒čĆą░ąĘąĖčéčī ąĖąĘ čüąĄą▒čÅ čüčéą░čĆčŗą╣ č鹥ą╗ąĄč乊ąĮąĮčŗą╣ ą╝ąŠą┤ąĄą╝. ąĪąĄą╣čćą░čü ą▒ąŠčĆčÄčüčī čü ą¤ąś čĆąĄą│čāą╗čÅč鹊čĆąŠą╝ ą┤ą╗čÅ LineFollower. ą¦č鹊-č鹊 ąĮąĖč湥ą│ąŠ ąĮąĄ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ. ąśą╗ąĖ ą┤ą░ąĮąĮčŗąĄ ąŠčé čéą░ą╣ą╝ąĄčĆą░ ą┐čĆąĖčģąŠą┤čÅčé ąĮąĄą║ąŠčĆčĆąĄą║čéąĮčŗąĄ, ąĖą╗ąĖ... ą¤ąŠąĮą░čćą░ą╗čā ą┐čŗčéą░ą╗čüčÅ ą┤ąĄą╗ą░čéčī "ąĮą░ ą│ą╗ą░ąĘ" - ą▓čĆąŠą┤ąĄ ą║čĆčāčéąĖčéčüčÅ, ąĮąŠ ąĘą▓čāą║ ąĮąĄčüą║ąŠą╗čīą║ąŠ čüčéčĆą░ąĮąĮčŗą╣. ą¦čāčéčī ą┐ąŠąĘąČąĄ, ą╝ąĮąĄ ą▓ąĘą▒čĆąĄą╗ąŠ ą▓ ą│ąŠą╗ąŠą▓čā, čćč鹊 čÅ ą╝ąŠą│čā ą┐čĆąŠą▓ąĄčĆčÅčéčī čüčéą░ą▒ąĖą╗čīąĮąŠčüčéčī ąŠą▒ąŠčĆąŠč鹊ą▓ čüčéčĆąŠą▒ąŠčüą║ąŠą┐ąĖč湥čüą║ąĖ. ąØą░ ą▓ą░ą╗ ąĮą░ą┤ąĄą╗ ą║ąŠą╗ąĄčüąŠ čā ą║ąŠč鹊čĆąŠą│ąŠ ąĄčüčéčī 12 čĆąĄą│čāą╗čÅčĆąĮčŗčģ "čüčéčĆčāą║čéčāčĆąĮčŗčģ 菹╗ąĄą╝ąĄąĮč鹊ą▓". ą¤ąŠčüčćąĖčéą░ą╗, čćč鹊 ą┐čĆąĖ 100ąōčå ą╝ąĄčĆčåą░ąĮąĖąĖ ą╗ą░ą╝ą┐ ą▓ ą║ąŠą╝ąĮą░č鹥, ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ "ą║ą░čĆčéąĖąĮą║ąĖ" ą╝ąĮąĄ ąĮčāąČąĮąŠ čŹč鹊 ą║ąŠą╗ąĄčüąŠ ą▓čĆą░čēą░čéčī 500 rpm. ąŻą▓čŗ - ą║ą░čĆčéąĖąĮą║ąĖ ąĮąĄčé. ąĪą╗ąĄą┤čāčÄčēąĖą╣ čŹčéą░ą┐ čüą┤ąĄą╗ą░čéčī ąČčāčĆąĮą░ą╗ąĖčĆąŠą▓ą░ąĮąĖąĄ - čüą┤ąĄą╗ą░ą╗ ą╝ą░čüčüąĖą▓ ąĮą░ 5000 菹╗ąĄą╝ąĄąĮč鹊ą▓ ąĖ čéčāą┤ą░ ąĘą░ą┐ąĖčüčŗą▓ą░čÄ ą┐ąŠą║ą░ąĘą░ąĮąĖčÅ čéą░čģąŠą┤ą░čéčćąĖą║ą░. ą¤čĆąŠą▒ą╗ąĄą╝ą░ ą║ą░ą║ čŹčéąĖ čåąĖčäčĆčŗ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī. ą¤ąŠą┤ ą┤ąĄą▒ą░ą│ą│ąĄčĆąŠą╝ ą┐ąŠčüčéą░ą▓ąĖą╗ Watch, ąĮąŠ čéą░ą╝ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé č鹊ą╗čīą║ąŠ 32 菹╗ąĄą╝ąĄąĮčéą░. ąØą░ąČą░ą╗ ąĮą░ ą║ąĮąŠą┐ą║čā "ą┐ąŠą║ą░ąĘą░čéčī ą▓čüčæ"... ą║ąŠą╝ą┐ ąĮą░ čåąĄą╗čŗą╣ ą▓ąĄč湥čĆ čüčéą░ą╗ ąĮąĄą┤ąŠčüčéčāą┐ąĄąĮ. ą¢ą░ą╗čī, čćč鹊 čā čŹč鹊ą│ąŠ čĆąŠą▒ąŠčéą░ ąĮąĄ ą┐čĆąĄą┤čāčüą╝ąŠčéčĆąĄąĮą░ ąĖąĮčäčĆą░čüčéčĆčāą║čéčāčĆą░ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ąĢčüčéčī č鹊ą╗čīą║ąŠ ą▓čŗčģąŠą┤ i2c ąĖ USB. ąÆč鹊čĆąŠą╣ ą┐ąŠą║ą░ ąĮąĄąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ą╗ ąĖ ąĮąĄ ą┐ąŠą╝ąĮčÄ, ąĮą░ą┤ąŠ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ą┐ąŠ čüčģąĄą╝ąĄ, ą╝ąŠąČąĄčé ą╗ąĖ ąŠąĮ čā ą╝ąĄąĮčÅ čĆą░ą▒ąŠčéą░čéčī čĆą░ąĘąŠą╝ čü ą▒ą░čéą░čĆąĄą╣ą║ąŠą╣. ąöąŠ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖą╣ ąŠčüčéą░ą╗ąŠčüčī 2 ąĮąĄą┤ąĄą╗ąĖ ąĖ čćčāą▓čüčéą▓čāčÄ, ą┐čĆąĖą┤čæčéčüčÅ ąĄčģą░čéčī ą┐ąŠ čüčéą░čĆąŠą╣ čüčģąĄą╝ąĄ. ą¤ąŠą┐čāčéąĮąŠ, čĆąĄčłą░čÄ ąĘą░ą┤ą░čćą║čā ą┐ąŠąĖčüą║ą░ ą║čĆą░čéčćą░ą╣čłąĄą│ąŠ ą┐čāčéąĖ ą▓ ą╗ą░ą▒ąĖčĆąĖąĮč鹥. ą×ą┤ąĮčā čäčāąĮą║čåąĖčÄ čāąČąĄ ąĮą░ą┐ąĖčüą░ą╗ - ąŠą▒čĆčāą▒ą░ąĮąĖąĄ čéčāą┐ąĖą║ąŠą▓čŗčģ ą▓ąĄčéą▓ąĄą╣. ą¤čĆą░ą▓ą┤ą░ ą┤ą╗čÅ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ, ąĮčāąČąĄąĮ ą▒čŗą╗ ą▒čŗ ą║ą░ą║ąŠą╣-ąĮąĖą▒čāą┤čī čüąĄčĆčŖčæąĘąĮčŗą╣ ą╗ą░ą▒ąĖčĆąĖąĮčé. ąśąĘ ą╗ąĄąĮčéčŗ čüą║ą╗ąĄąĖčéčī ą▓čĆčÅą┤ą╗ąĖ čāą┤ą░čüčéčüčÅ. ą¤ąŠčŹč鹊ą╝čā ąĮą░čłąĄą╗ ą▓ ąĖąĮč鹥čĆąĮąĄč鹥 ą║ą░čĆčéąĖąĮą║čā čü ą║ą░ą║ąŠą╣-č鹊 čĆąŠčüčüąĖą╣čüą║ąŠą╣ ąŠą╗ąĖą╝ą┐ąĖą░ą┤čŗ ą┐ąŠ čĆąŠą▒ąŠč鹊č鹥čģąĮąĖą║ąĄ ą░ąČ 2004 ą│ąŠą┤ą░. ąóą░ą╝ ą╗ą░ą▒ąĖčĆąĖąĮčé 16 ąĮą░ 16. ą¤ąŠą┐čĆąŠą▒čāčÄ ąĄą│ąŠ ąŠčåąĖčäčĆąŠą▓ą░čéčī ąĖ ąĘą░ą┐ąĖčģąĮčāčéčī ą▓ ą┐ą░ą╝čÅčéčī čĆąŠą▒ąŠčéčā. |
|
| ąÉą▓č鹊čĆ: | Ser60 [ ą¦čé čÅąĮą▓ 09, 2020 08:36:47 ] |
| ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: | Re: RSLK ąŠčé TI (Robotic System Learning Kit) |
ąØą░čüčćčæčé ą║čĆą░čéčćą░ą╣čłąĄą│ąŠ ą┐čāčéąĖ ą▓ ą│čĆą░č乥 - ą░ą╗ą│ąŠčĆąĖčéą╝ ąöąĄą╣ą║čüčéčĆčŗ ąĮąĄ ą┐ąŠą┤ąŠą╣ą┤čæčé? |
|
| ąÉą▓č鹊čĆ: | uldemir [ ą¦čé čÅąĮą▓ 09, 2020 19:43:29 ] |
| ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: | Re: RSLK ąŠčé TI (Robotic System Learning Kit) |
ą×! ą░ čÅ ąĖ ąĮąĄ ąĘąĮą░ą╗, čćč鹊 ąŠąĮ čéą░ą║ ąĘąŠą▓čæčéčüčÅ. ąöą░, čćč鹊-č鹊 ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ čÅ ąĖ ą┐čŗčéą░čÄčüčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī. ąóąŠą╗čīą║ąŠ ą┐ąŠą╝ąĖą╝ąŠ ą▓ąĄčüą░ čĆąĄą▒čĆą░ ą│čĆą░čäą░ čģąŠčćčā ą▓ą▓ąĄčüčéąĖ ąĖ ą▓ąĄčü ą┐čĆąŠčģąŠą┤ą░ č湥čĆąĄąĘ ą▓ąĄčĆčłąĖąĮčā. ąóą░ą║ ą║ą░ą║ ą╗ą░ą▒ąĖčĆąĖąĮčé ąŠčĆč鹊ą│ąŠąĮą░ą╗čīąĮčŗą╣, č鹊 ą┐čĆąŠčģąŠą┤ č湥čĆąĄąĘ ą▓ąĄčĆčłąĖąĮčā ąĮąĄ ą╝ąĄąĮčÅčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ąŠą╗ąČąĄąĮ ąĖą╝ąĄčéčī ąŠą┤ąĖąĮ ą▓ąĄčü, ą░ ą╝ąĄąĮčÅčÅ - ą┤čĆčāą│ąŠą╣. ąó.ąĄ. ą┐čĆąĖ ąĮąĄą║ąŠč鹊čĆąŠą╝ čüąŠąŠčéąĮąŠčłąĄąĮąĖąĖ čŹčéąĖčģ ą▓ąĄčüąŠą▓ (čÅ ą┐ąŠčüą╝ąŠčéčĆčÄ čüą║ąŠą╗čīą║ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čéčĆąĄą▒čāąĄčé ą┐ąŠą▓ąŠčĆąŠčé) čģąŠčćčā ą┐ąŠą╗čāčćąĖčéčī ą╝ą░čĆčłčĆčāčé čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ čćąĖčüą╗ąŠą╝ ą┐ąŠčüąĄčēą░ąĄą╝čŗčģ čāąĘą╗ąŠą▓, ąĘą░č鹥ą╝ - ą╝ą░ąĮąĄą▓čĆąŠą▓, ąĖ, ąĮą░ą║ąŠąĮąĄčå, ą║čĆą░čéčćą░ą╣čłąĖą╣ ą┐ąŠ čĆą░čüčüč鹊čÅąĮąĖčÄ. ąó.ąĄ ą▒ąŠą╗ąĄąĄ ą┤ą╗ąĖąĮąĮčŗą╣ ą┐čāčéčī čü ą╝ąĄąĮčīčłąĖą╝ čćąĖčüą╗ąŠą╝ ą╝ą░ąĮčæą▓čĆąŠą▓ ą╝ąŠąČąĄčé ąŠą║ą░ąĘą░čéčīčüčÅ ąŠą┐čéąĖą╝ą░ą╗čīąĮąĄąĄ, č湥ą╝ ąĮą░ąĖą║čĆą░čéčćą░ą╣čłąĖą╣ ą┐ąŠ čĆą░čüčüč鹊čÅąĮąĖčÄ. ąØčā ąĖ ą▒čŗą╗ą░ ą╝čŗčüą╗čī, č鹥 ą╝ą░čĆčłčĆčāčéčŗ, ą║ąŠč鹊čĆčŗąĄ ąŠą║ą░ąĘčŗą▓ą░čÄčéčüčÅ ąĘą░ą▓ąĄą┤ąŠą╝ąŠ ą┤ą╗ąĖąĮąĮąĄąĄ - ą┐čĆąŠčüč鹊 čāą┤ą░ą╗čÅčéčī. ąźąŠčéčÅ, ąĮą░ą┤ąŠ ąĄčēąĄ ą┐ąŠą┤čāą╝ą░čéčī. ą¤ąŠą║ą░ čÅ ą║ąŠą│ą┤ą░ ąĮą░čćą░ą╗ ą┐ąĖčüą░čéčī ąĘą░čéą║ąĮčāą╗čüčÅ, čćč鹊 ą╝ąĮąĄ ąĮčāąČąĮąŠ ąĄčēąĄ čāčćąĖčéčŗą▓ą░čéčī ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ, ąŠčéą║čāą┤ą░ čÅ ą┐čĆąĖčłąĄą╗, ą┐ąŠčŹč鹊ą╝čā čĆą░ąĘą╝čŗčłą╗čÅčÄ ą║ą░ą║ ąĖąĮą░č湥 ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░čéčī čüčéčĆčāą║čéčāčĆčā ą┤ą░ąĮąĮčŗčģ. ąŚą░ą▒ąĖą╗ čÅ ą▓ Exel "č鹥čüč鹊ą▓čŗą╣" ą╗ą░ą▒ąĖčĆąĖąĮčé - ą▒čāą┤čā ąĮą░ ąĮčæą╝ čéčĆąĄąĮąĖčĆąŠą▓ą░čéčī ą░ą╗ą│ąŠčĆąĖčéą╝. ą¤čĆą░ą▓ą┤ą░, čāą┤ą░ą╗ąĄąĮąĖąĄ čéčāą┐ąĖą║ąŠą▓čŗčģ ą▓ąĄčéą▓ąĄą╣ ąĮąĄ čüąĖą╗čīąĮąŠ čāą┐čĆąŠčēą░ąĄčé ą╗ą░ą▒ąĖčĆąĖąĮčé. ąÆ ąĮčæą╝ 114 ą▓ąĄčĆčłąĖąĮ, ą░ čéčāą┐ąĖą║ąŠą▓ ą▓čüąĄą│ąŠ ą│ą┤ąĄ-č鹊 4, ąĮąĄ čüčćąĖčéą░čÅ čéčāą┐ąĖą║ą░ą╝ąĖ čüčéą░čĆčé ąĖ čäąĖąĮąĖčł. |
|
| ąÉą▓č鹊čĆ: | Ser60 [ ą¦čé čÅąĮą▓ 09, 2020 20:15:02 ] |
| ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: | Re: RSLK ąŠčé TI (Robotic System Learning Kit) |
ąöą╗čÅ čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ, ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčī ą│čĆą░čä čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą▓ąĄąĘą┤ąĄ ą│ą┤ąĄ ąĄčüčéčī ą▓ąĄčéą▓ą╗ąĄąĮąĖąĄ (ąĮą░ ą┐čĆąĖą╝ąĄčĆąĄ T-ą▓ąĄčéą▓ą╗ąĄąĮąĖčÅ) ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ ą║ą░čĆčéąĖąĮą║ąĄ. ą¤ąĄčĆą▓ąŠąĮą░čćą░ą╗čīąĮąŠ ą▓ąĄčü ą║ą░ąČą┤ąŠą│ąŠ čćčæčĆąĮąŠą│ąŠ čĆąĄą▒čĆą░ 1 (ą╗ąĄą▓ą░čÅ ą║ą░čĆčéąĖąĮą║ą░). ąÆą▓ąĄą┤čæą╝ ąĮą░ ą║ą░ąČą┤ąŠą╝ čĆąĄą▒čĆąĄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ą║čĆą░čüąĮčāčÄ ą▓ąĄčĆčłąĖąĮčā ąĖ čāą▒ąĄčĆčæą╝ ą┐ąĄčĆą▓ąŠąĮą░čćą░ą╗čīąĮčāčÄ čćčæčĆąĮčāčÄ (ą┐čĆą░ą▓ą░čÅ ą║ą░čĆčéąĖąĮą║ą░). ą¤ąŠą╗ąŠąČąĖą╝ ą▓ąĄčü ą║ą░ąČą┤ąŠą│ąŠ ąĮą░ą║ą╗ąŠąĮąĮąŠą│ąŠ ą║čĆą░čüąĮąŠą│ąŠ čĆąĄą▒čĆą░ =1, ą░ ą▓ąĄčü ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮąŠą│ąŠ ą║čĆą░čüąĮąŠą│ąŠ čĆąĄą▒čĆą░ čĆą░ą▓ąĮčŗą╝ 0. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐čĆąŠčģąŠą┤ č湥čĆąĄąĘ ą▓ąĄčĆčłąĖąĮčā ą▒ąĄąĘ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▒čāą┤ąĄčé ą┐čĆąĄą┤ą┐ąŠčćčéąĖč鹥ą╗čīąĮąĄąĄ ą▓ čüą╝čŗčüą╗ąĄ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą│ąŠ čĆą░čüčüč鹊čÅąĮąĖčÅ, čé.ą║. ą┐čĆąŠčģąŠą┤ ą┐ąŠ ąĮą░ą║ą╗ąŠąĮąĮąŠą╝čā čĆąĄą▒čĆčā ą┐čĆąĖ čüą╝ąĄąĮąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčé ą╗ąĖčłąĮčÄčÄ 1 ą║ čĆą░čüčüč鹊čÅąĮąĖčÄ. ąÜą░ą║-č鹊 čéą░ą║... ąÆą╗ąŠąČąĄąĮąĖąĄ:
|
|
| ąÉą▓č鹊čĆ: | uldemir [ ą¤čé čÅąĮą▓ 10, 2020 08:01:16 ] |
| ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: | Re: RSLK ąŠčé TI (Robotic System Learning Kit) |
ąźą╝. č鹊ą│ą┤ą░ čāąČ ą┤ąŠčüčéą░č鹊čćąĮąŠ ą┐čĆąŠčüč鹊 čāą┤ą╗ąĖąĮąĮąĖčéčī ą┐čĆąĖą╝čŗą║ą░čÄčēąĄąĄ čĆąĄą▒čĆąŠ. ąØąŠ ą┤ą╗čÅ ą┐ąŠą╗ąĮąŠą│ąŠ X-ąŠą▒čĆą░ąĘąĮąŠą│ąŠ ą┐ąĄčĆąĄą║čĆčæčüčéą║ą░ č湥ą│ąŠ-č鹊 čéą░ą║ ąĮąĄ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ. ą¤ąŠčģąŠąČąĄ, ą┐čĆąŠčēąĄ ą▓ą▓ąĄčüčéąĖ ą▓ą╝ąĄčüč鹊 ąŠą┤ąĮąŠą╣ ą▓ąĄčĆčłąĖąĮčŗ ą┤ą▓ąĄ: ą┤ą╗čÅ ą╝ąĄčĆąĖą┤ąĖą░ąĮą░ą╗čīąĮąŠą│ąŠ ąĖ čłąĖčĆąŠčéąĮąŠą│ąŠ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ ąĖčģ čüąŠąĄą┤ąĖąĮąĖčéčī čĆąĄą▒čĆąŠą╝ ąĖą╝ąĄčÄčēąĖą╝ ą▓ąĄčü ą┐ąŠą▓ąŠčĆąŠčéą░. ą¦ąĄą╝-č鹊 ąĮą░ą┐ąŠą╝ąĮąĖą╗ąŠ čüčģąĄą╝čā ą╝ąĄčéčĆąŠ... čü ą┐ąĄčĆąĄčüą░ą┤ą║ą░ą╝ąĖ ąĮą░ čĆą░ąĘąĮčŗčģ čāčĆąŠą▓ąĮčÅčģ. ą¤čĆąŠą▓čæą╗ ą░ąĮą░ą╗ąĖąĘ "ąŠą╗ąĖą╝ą┐ąĖą░ą┤ąĮąŠą│ąŠ" ą╗ą░ą▒ąĖčĆąĖąĮčéą░. čéčāą┐ąĖą║ąŠą▓ - 9 (ą▓ą╝ąĄčüč鹥 čü ąĮą░čćą░ą╗ąŠą╝ ąĖ ą║ąŠąĮčåąŠą╝), 71 ą┐ąŠą▓ąŠčĆąŠčé, 35 T-ąŠą▒čĆą░ąĘąĮčŗčģ ą┐ąĄčĆąĄą║čĆčæčüčéą║ą░ ąĖ ąĮąĖ ąŠą┤ąĮąŠą│ąŠ X-ąŠą▒čĆą░ąĘąĮąŠą│ąŠ. |
|
| ąÉą▓č鹊čĆ: | Ser60 [ ą¤čé čÅąĮą▓ 10, 2020 09:56:08 ] |
| ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: | Re: RSLK ąŠčé TI (Robotic System Learning Kit) |
ą¤ąŠą╗čāčćą░ąĄčéčüčÅ - ąĮą░ą┤ąŠ ą║ą░čĆčéąĖąĮą║čā ąŠčéčĆą░ąĘąĖčéčī ą▓ąĮąĖąĘ ąĖ ą┤ąŠą▒ą░ą▓ąĖčéčī čĆąĄą▒čĆąŠ čü ąĮčāą╗ąĄą▓čŗą╝ ą▓ąĄčüąŠą╝, čüąŠąĄą┤ąĖąĮčÅčÄčēąĄąĄ ą▓ąĄčĆčģąĮčÄčÄ ąĖ ąĮąĖąČąĮčÄčÄ č鹊čćą║ąĖ. ąØąŠ ąÆą░čłąĄ čĆąĄčłąĄąĮąĖąĄ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠ ą┐čĆąŠčēąĄ. |
|
| ąÉą▓č鹊čĆ: | uldemir [ ąĪą▒ čÅąĮą▓ 11, 2020 12:42:44 ] |
| ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: | Re: RSLK ąŠčé TI (Robotic System Learning Kit) |
ą¤čĆąŠą┤ąŠą╗ąČąĄąĮąĖąĄ ą▒ąŠčĆčīą▒čŗ čü ą¤ąś ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ čā čĆąŠą▒ąŠčéą░ ąĮą░ PSoC. ąÆčüčÄ ąĘą░ą┤čāą╝ą░ąĮąĮčāčÄ čüčģąĄą╝čā ą┤ą╗čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┐ąĄčĆąĖąŠą┤ą░ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ąĖą╝ą┐čāą╗čīčüąŠą▓ čĆą░ąĘąŠą▒čĆą░ą╗. ą¤ąŠč鹊ą╝čā ą║ą░ą║ ąŠąĮą░ ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ąĮą░ą┤ąŠ. ąĀą░ąĘą▒ąĖčĆą░čéčīčüčÅ ą▓ č湥ą╝ ą┐čĆąĖčćąĖąĮą░ ąĮąĄčé ą▓čĆąĄą╝ąĄąĮąĖ, ą┐ąŠčŹč鹊ą╝čā ą┐ąŠčłąĄą╗ ą┐ąŠ ą┐čĆąŠč鹊čĆąĄąĮąĮąŠą╣ ą┤ąŠčĆąŠąČą║ąĄ: čüą▓ąŠą▒ąŠą┤ąĮąŠ ą▒ąĄą│čāčēąĖą╣ čéą░ą╣ą╝ąĄčĆ ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ąĘą░čģą▓ą░čéčā ąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÄ. ą¤čĆąĖčćąĖąĮą░, ą┐ąŠč湥ą╝čā čā ą╝ąĄąĮčÅ PSoC Creator "ąĘą░ą║ą╗ąĖąĮąĖą▓ą░ą╗ąŠ" - ą╝ąŠčÅ ąČą░ą┤ąĮąŠčüčéčī. ąöą╗čÅ ąČčāčĆąĮą░ą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ čüąŠąĘą┤ą░ą╗ ą╝ą░čüčüąĖą▓ ąĖąĘ 5000 菹╗ąĄą╝ąĄąĮč鹊ą▓ ąĖ ą▓čüčéą░ą▓ąĖą╗ ąĖčģ ą▓ Watch. ąÜčĆąĄą░č鹊čĆ ą┐čĆąŠčüč鹊 ąĮąĄ ą╝ąŠą│ ą▒čŗčüčéčĆąŠ ą┐ąĄčĆąĄą▓ą░čĆąĖčéčī čéą░ą║čāčÄ č鹊ą╗ą┐čā čćąĖčüąĄą╗. ąØąŠ čéą░ą║ ą║ą░ą║ č鹥čüčé čā ą╝ąĄąĮčÅ ąĖą┤čæčé 3 čüąĄą║čāąĮą┤čŗ, ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čĆą░ąĘ ą▓ 10ą╝čü (čé.ąĄ. 100 čĆą░ąĘ ą▓ čüąĄą║čāąĮą┤čā), č鹊 čĆąĄą░ą╗čīąĮąŠ ąĮčāąČąĮąŠ ą▓čüąĄą│ąŠ 300 ąŠčéčüč湥č鹊ą▓. ąØčā, ą╗ą░ą┤ąĮąŠ - 313, čéą░ą║ ą║ą░ą║ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čćčāčéčī čćą░čēąĄ - čĆą░ąĘ ą▓ 9.54 ą╝čü. ąÆąĘčÅčéčī čŹč鹊čé ą╝ą░čüčüąĖą▓ ą▓ ą║ą╗ąĖą┐ą▒ąŠą░čĆą┤ čāą┤ąŠą▒ąĮąĄą╣ ą▓čüąĄą│ąŠ ąŠą║ą░ąĘą░ą╗ąŠčüčī ąĖąĘ ąĘą░ą║ą╗ą░ą┤ą║ąĖ Memory, ą░ ą┐ąŠč鹊ą╝ ą┐čĆąŠčüč鹊 ą▒čĆąŠčüą░ą╗ ą▓ 菹╗ąĄą║čéčĆąŠąĮąĮčāčÄ čéą░ą▒ą╗ąĖčåčā: 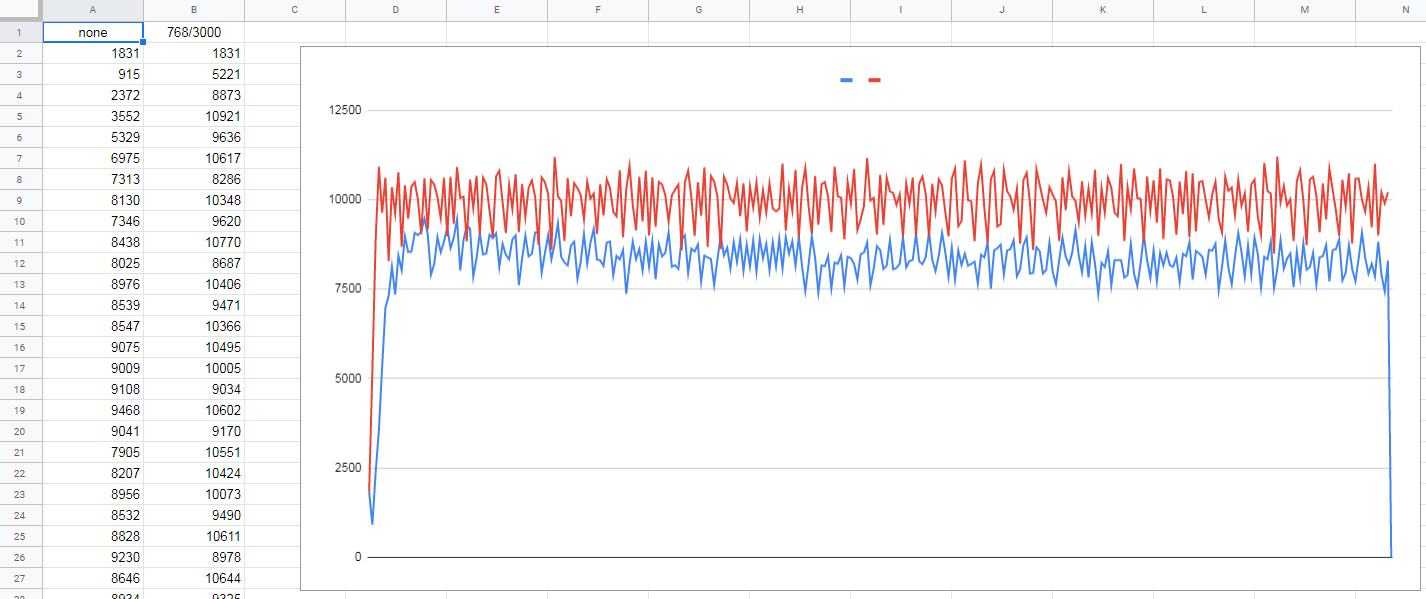 ąÜčĆą░čüąĮą░čÅ ą╗ąĖąĮąĖčÅ čŹč鹊 čĆąĄąĘčāą╗čīčéą░čé čĆą░ą▒ąŠčéčŗ ą¤ąś ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čāą┤ąĄčƹȹĖą▓ą░čÄčēąĄą│ąŠ 1000 rpm. ąĪąĖąĮčÅčÅ ą╗ąĖąĮąĖčÅ - čüą▓ąŠą▒ąŠą┤ąĮąŠąĄ ą▓čĆą░čēąĄąĮąĖąĄ ą╝ąŠč鹊čĆą░ ą┐čĆąĖ, ą┐čĆąĖą╝ąĄčĆąĮąŠ, čéčĆąĄčéąĖ ą┐ąŠą┤ą░ą▓ą░ąĄą╝ąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ. ą¤ąĄčĆą▓čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 1831 ąĖ 915 - čŹč鹊 ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ rpm - ą║ąŠą╗ąĄčüąŠ ąĖą╗ąĖ čüč鹊ąĖčé ąĮą░ ą╝ąĄčüč鹥 ąĖą╗ąĖ ą▓čĆą░čēą░ąĄčéčüčÅ ą╝ąĄą┤ą╗ąĄąĮąĮąĄąĄ čäąĖą║čüąĖčĆčāąĄą╝čŗčģ ąŠą▒ąŠčĆąŠč鹊ą▓(čģą╝, ą┐ąŠč湥ą╝čā 1831 - čüąĄą╣čćą░čü ąĖčüą┐čĆą░ą▓ą╗čÄ). ą£ąŠąČąĮąŠ ąĘą░ą╝ąĄčéąĖčéčī ą║ą░ą║ čĆą░ąĘą╗ąĖčćą░ąĄčéčüčÅ ą▓čĆąĄą╝čÅ čĆąĄą░ą║čåąĖąĖ čü čĆąĄą│čāą╗čÅč鹊čĆąŠą╝ ąĖ ą▒ąĄąĘ. p.s. ąØą░ą┐ąĖčüą░ą╗ ąĄčēąĄ ąĖ čāčüčĆąĄą┤ąĮąĄąĮąĖąĄ: 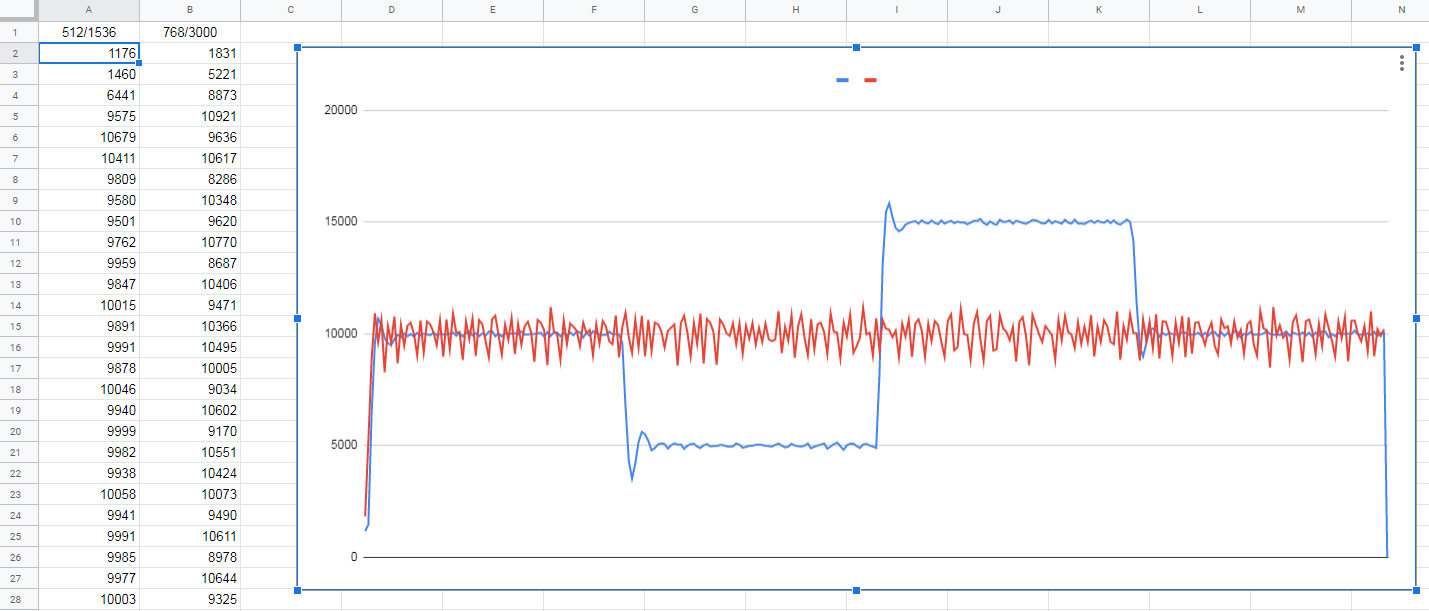 ąÜčĆą░čüąĮą░čÅ ą╗ąĖąĮąĖčÅ - čŹč鹊 č鹥 ąČąĄ čüčéą░čĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ, čćč鹊 ąĖ ąĮą░ ą┐čĆąĄą┤čŗą┤čāčēąĄą╣ ą║ą░čĆčéąĖąĮą║ąĄ, ą░ čüąĖąĮčÅčÅ ą╗ąĖąĮąĖčÅ - čĆąĄąĘčāą╗čīčéą░čé čĆą░ą▒ąŠčéčŗ "čāčüčĆąĄą┤ąĮąĖč鹥ą╗čÅ". ą¤čĆą░ą▓ą┤ą░, ą┐čĆąĖčłą╗ąŠčüčī čāą╝ąĄąĮčīčłąĖčéčī ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ ąĖąĮč鹥ą│čĆą░ą╗čīąĮąŠą╣ ąĖ ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮąŠą╣ čüąŠčüčéą░ą▓ą╗čÅčÄčēąĄą╣, ąĖąĮą░č湥 ą┐ąŠčüą╗ąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąŠą▒ąŠčĆąŠč鹊ą▓ - ąŠąĮąĖ ą┤ąŠą╗ą│ąŠ ą║ąŠą╗ąĄą▒ą░ą╗ąĖčüčī čü ą▒ąŠą╗čīčłąŠą╣ ą░ą╝ą┐ą╗ąĖčéčāą┤ąŠą╣, ą┐ąŠą║ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ą╗ąĖčüčī ąĘą░ą┤ą░ąĮąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ. ąØčā ąĖ čÅ ąĮąĄą╝ąĮąŠą│ąŠ čĆą░ąĘąĮąŠąŠą▒čĆą░ąĘąĖą╗ č鹥čüčé - č鹥ą┐ąĄčĆčī ą╝ąŠč鹊čĆ ą║čĆčāčéąĖčé ą║ąŠą╗ąĄčüąŠ čü ąŠą▒ąŠčĆąŠčéą░ą╝ąĖ 1000, 500, 1500 ąĖ 1000 rpm ą┐ąŠ 0.75 čüąĄą║čāąĮą┤. |
|
| ąÉą▓č鹊čĆ: | uldemir [ ą¤čé čÅąĮą▓ 17, 2020 20:51:13 ] |
| ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: | Re: RSLK ąŠčé TI (Robotic System Learning Kit) |
ąæčŗčüčéčĆąŠ ą┐čĆąŠčćąĖčéą░ą╗ ąÆą░čłčā čüčéą░čéčīčÄ ą┐čĆąŠ čüąĖą╗ą░ą▒ąŠą▓čüą║ąĖą╣ Bluetooth. ąóąĄą┐ąĄčĆčī ąĮąĄą║ąŠč鹊čĆčŗąĄ ą╝ąŠą╝ąĄąĮčéčŗ čü čüąĄą║čÄčĆąĮąŠčüčéčīčÄ čüčéą░ą╗ąĖ ą┐ąŠąĮčÅčéąĮčŗ. ąØąŠ, čćč鹊ą▒čŗ ą┐ąŠą▓č鹊čĆąĖčéčī ąĮą░ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī - čüčéčĆą░čłąĮąŠ ą┤ąŠčĆąŠą│ąĖąĄ čŹčéąĖ ą║ąŠą╝ą┐ą╗ąĄą║čéčŗ. ąźąŠčéčÅ čüą░ą╝ ą┐ąŠ čüąĄą▒ąĄ ą╝ąŠą┤čāą╗čī BGM13P ą┤ąŠčüčéą░č鹊čćąĮąŠ ą┤ąĄčłčæą▓. ąÆąŠčé ąĄčüčéčī ą╝čŗčüą╗čī, ąĄčüą╗ąĖ čā ą╝ąĄąĮčÅ ą┐ąŠą╗čāčćąĖčéčüčÅ ą┐ąŠą╗čāčćąĖčéčī ą┐čĆąĖąĄą╝ą╗ąĄą╝čāčÄ čüą║ąŠčĆąŠčüčéčī čĆąŠą▒ąŠčéčā ąĮą░ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖąĖ ą╗ąĖąĮąĖąĖ, č鹊 čüą╗ąĄą┤čāčÄčēąĖą╣ ąĮą░ą┤ąŠ ą▒čāą┤ąĄčé čüą┤ąĄą╗ą░čéčī čāąČąĄ čü čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą┐ąŠą╗ąĮąŠčüčéčīčÄ č湥čĆąĄąĘ bluetooth. ąÆčĆąĄą╝čÅ ą┐čĆąŠą▓ąŠą┤ąĖą╝ąŠąĄ ą▓ ą┐ąŠąĄąĘą┤ąĄ ą┐ąŠčéčĆą░čéąĖą╗ ąĮą░ ą░ą┤ą░ą┐čéą░čåąĖčÄ OLED ą┤ąĖčüą┐ą╗ąĄčÅ ąĮą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ SH1106. ąöą░, ą║ąŠą╣-ą║ą░ą║ąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ čüąŠą▓ą┐ą░ą┤ą░čÄčé čü SSD1306, ąĮąŠ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą╝ąŠą╝ąĄąĮčéčŗ ąĮąĄ čüąŠą▓ą┐ą░ą┤ą░čÄčé. ąöą░ą╗ąĄąĄ ąŠčåąĖčäčĆąŠą▓ą░ąĮąĮčŗą╣ ą╗ą░ą▒ąĖčĆąĖąĮčé ąĘą░ą┐ąĖčüą░ą╗ ą▓ ą┐ą░ą╝čÅčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░: 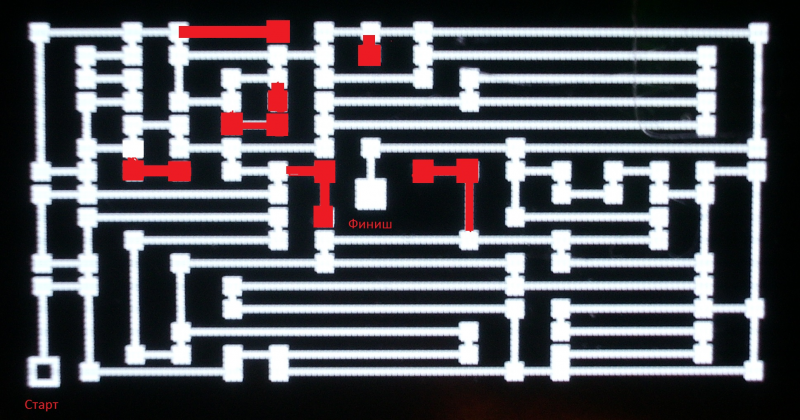 ąÜčĆą░čüąĮčŗą╝ čÅ ąŠčéą╝ąĄčéąĖą╗ čéčāą┐ąĖą║ąŠą▓čŗąĄ ą▓ąĄčéą▓ąĖ. ąÆąŠąŠą▒čēąĄ-č鹊 ą╗ą░ą▒ąĖčĆąĖąĮčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī "ą║ą▓ą░ą┤čĆą░čéąĮčŗą╝", ą┐čĆąŠčüč鹊 ąĄą│ąŠ čĆą░čüčéčÅąĮčāą╗ąŠ ą▓ąŠ ą▓ąĄčüčī 菹║čĆą░ąĮ. ąÆąŠąĘą╝ąŠąČąĮąŠ, ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą╝ą░čüčłčéą░ą▒ąĖčĆąŠą▓ą░ąĮąĖčÅ čüą╗ąĄą┤čāąĄčé čüą┤ąĄą╗ą░čéčī ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ ąĖ ą┐ąŠ-ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗ąĖ, ąĖ ą┐ąŠ-ą▓ąĄčĆčéąĖą║ą░ą╗ąĖ. ąØą░ą┐ąĖčüą░ą╗ ą┐ąĄčĆą▓čāčÄ čćą░čüčéčī ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ąöąĄą╣ą║čüčéčĆčŗ - ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ ą║čĆą░čéčćą░ą╣čłąĖčģ čĆą░čüčüč鹊čÅąĮąĖą╣. ą£ąĮąĄ, ą▓ąŠąĘą╝ąŠąČąĮąŠ, ą┐ąŠą║ą░ąĘą░ą╗ąŠčüčī, ąĮąŠ čäąĖąĮąĖčł - čŹč鹊 čüą░ą╝ą░čÅ čāą┤ą░ą╗čæąĮąĮą░čÅ č鹊čćą║ą░ ąŠčé čüčéą░čĆčéą░. ąÆąŠ ą▓čüčÅą║ąŠą╝ čüą╗čāčćą░ąĄ, ą┐čĆąŠčüą╝ąŠčéčĆąĄą▓ ą╝ą░čüčüąĖą▓ čĆą░čüčüč鹊čÅąĮąĖą╣ čÅ ąĮąĖą│ą┤ąĄ ąĮąĄ čāą▓ąĖą┤ąĄą╗ čćąĖčüą╗ą░ ą▒ąŠą╗čīčłąĄ, č湥ą╝ ą▓ čäąĖąĮąĖčłąĮąŠą╝ čāąĘą╗ąĄ. ąØąŠ, čŹč鹊 ą┐ąŠą║ą░ čÅ ąĄčēąĄ ąĮąĄ ą▓ą▓čæą╗ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ "čüč鹊ąĖą╝ąŠčüčéąĖ" ą┐čĆąŠčģąŠą┤ą░ č湥čĆąĄąĘ čāąĘąĄą╗ ą┐čĆčÅą╝ąŠ ąĖ čü ą┐ąŠą▓ąŠčĆąŠč鹊ą╝. ąÆč鹊čĆą░čÅ čćą░čüčéčī, ąĮą░ ąŠčüąĮąŠą▓ąĄ čŹč鹊ą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ (ą║čĆą░čéčćą░ą╣čłąĖčģ čĆą░čüčüč鹊čÅąĮąĖą╣), ąĮą░ą┤ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą║čĆą░čéčćą░ą╣čłąĖą╣ ą╝ą░čĆčłčĆčāčé. ąŁč鹊 ąĮą░ą┤ąŠ ą┤ąĄą╗ą░čéčī čü čäąĖąĮąĖčłąĮąŠą╣ č鹊čćą║ąĖ - ąĖčüą║ą░čéčī ą▓ ąŠą║čĆčāą│ąĄ čāąĘą╗čŗ čü ą╝ąĄąĮčīčłąĖą╝ čĆą░čüčüč鹊čÅąĮąĖąĄą╝, č湥ą╝ ą▓ č鹥ą║čāčēąĄą╝ čāąĘą╗ąĄ, ąĮą░ ą▓ąĄą╗ąĖčćąĖąĮčā čĆą░čüčüč鹊čÅąĮąĖčÅ ą╝ąĄąČą┤čā čāąĘą╗ą░ą╝ąĖ. ąÉ ą┐ąŠč鹊ą╝ ąĮą░ą┤ąŠ ą▒čāą┤ąĄčé čŹč鹊čé ą┐čāčéčī "čĆą░ąĘą▓ąĄčĆąĮčāčéčī" ąĘą░ą┤ąŠą╝ ąĮą░ą┐ąĄčĆčæą┤. ąØąŠ čÅ čéčāčé ą┐ąŠą┤čāą╝ą░ą╗, čćč鹊 čÅ ą╝ąŠą│čā ąĖčüą║ą░čéčī ą║čĆą░čéčćą░ą╣čłąĖąĄ čĆą░čüčüč鹊čÅąĮąĖčÅ ąŠčé čäąĖąĮąĖčłą░ ą┤ąŠ čüčéą░čĆčéą░ ąĖ č鹊ą│ą┤ą░ ą┐čāčéčī čāąČąĄ čüčĆą░ąĘčā ą▒čāą┤ąĄčé ą│ąŠč鹊ą▓ ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÄ. |
|
| ąÉą▓č鹊čĆ: | Ser60 [ ą¤čé čÅąĮą▓ 17, 2020 21:24:03 ] |
| ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: | Re: RSLK ąŠčé TI (Robotic System Learning Kit) |
ą» čéčĆąĄčéčīčÄ čćą░čüčéčī ą╝ąŠąČąĄčé čüčĆą░ąĘčā ąĮą░ ą╝ąŠą┤čāą╗čī ą┐ąŠčĆčéąĖčĆčāčÄ. ąöą╗čÅ čüąĄą▒čÅ ąŠą┐čĆąŠą▒ąŠą▓ą░ą╗ ą┐ąŠčĆčé ąŠą┤ąĮąŠą│ąŠ ąĖąĘ ą┐čĆąŠąĄą║č鹊ą▓ čü BME280, ą▓čüčæ čĆą░ą▒ąŠčéą░ąĄčé. ą¤ąŠčĆčéąĖčĆčāąĄčéčüčÅ ą▒čŗčüčéčĆąŠ, ąŠčüąŠą▒ąĄąĮąĮąŠ ąĄčüą╗ąĖ ąĮąĄ ą▓čŗčćąĖčüčćą░čéčī ą║ąŠą┤, čāą┤ą░ą╗čÅčÅ ąĖąĘ ąĮąĄą│ąŠ ą╗ąĖčłąĮąĄąĄ.  ąØą░čüčćčæčé ą┐ąŠčüčéčĆąŠąĄąĮąĖčÅ ą┐čāčéąĖ ą▓ ąöąĄą╣ą║čüčéčĆąĄ, čéą░ą╝ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ ą▓ąĄčĆčłąĖąĮčŗ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ predessor, ąĖ ą┐ąŠč鹊ą╝ ą┐čāčéčī ą┐ąŠ ąĮąĖą╝ čüčĆą░ąĘčā čüčéčĆąŠąĖčéčüčÅ. ąöąĄčéą░ą╗ąĖ čüąĄą╣čćą░čü ą┤ą░čéčī ąĮąĄ ą╝ąŠą│čā (ą┐ąĖčłčā ąĖąĘ Metropolitan museum ą▓ ąØčīčÄ ąÖąŠčĆą║ąĄ). ąĢčüą╗ąĖ ąĮąĄ ąĮą░ą╣ą┤čæč鹥 ąĖ ą▒čāą┤ąĄčé ąĄčēčæ ą░ą║čéčāą░ą╗čīąĮąŠ, ą╝ąŠą│čā ąŠą┐ąĖčüą░čéčī ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ ąĮą░ čüą╗ąĄą┤čāčÄčēąĄą╣ ąĮąĄą┤ąĄą╗ąĄ ą┐ąŠ ą▓ąŠąĘą▓čĆą░čēąĄąĮąĖčÄ. |
|
| ąÉą▓č鹊čĆ: | uldemir [ ąĪą▒ čÅąĮą▓ 18, 2020 16:27:53 ] |
| ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: | Re: RSLK ąŠčé TI (Robotic System Learning Kit) |
ąśąĘ č鹥ąŠčĆąĖąĖ, čÅ ą┐ąŠąĮčÅą╗, čćč鹊 ąĄčüą╗ąĖ ąĄčüčéčī ą║ą░čĆčéą░ čĆą░čüčüč鹊čÅąĮąĖą╣ ą┤ąŠ "ąĮčāą╗ąĄą▓ąŠą╣" ą▓ąĄčĆčłąĖąĮčŗ, č鹊 ąĄčæ ą╝ąŠąČąĮąŠ ąŠą║čĆąĄčüčéąĖčéčī "ą║ą░čĆč鹊ą╣ ą▓čŗčüąŠčé", č鹊 ąĮčāąČąĮąŠ ą┐ąŠ čŹč鹊ą╣ ą║ą░čĆč鹥 ą┐čĆąŠčüč鹊 čüą║ą░čéčŗą▓ą░čéčīčüčÅ ą▓ąĮąĖąĘ ą┐ąŠ čüą░ą╝čŗą╝ ą║čĆčāčéčŗą╝ ą│čĆą░ąĮčÅą╝. 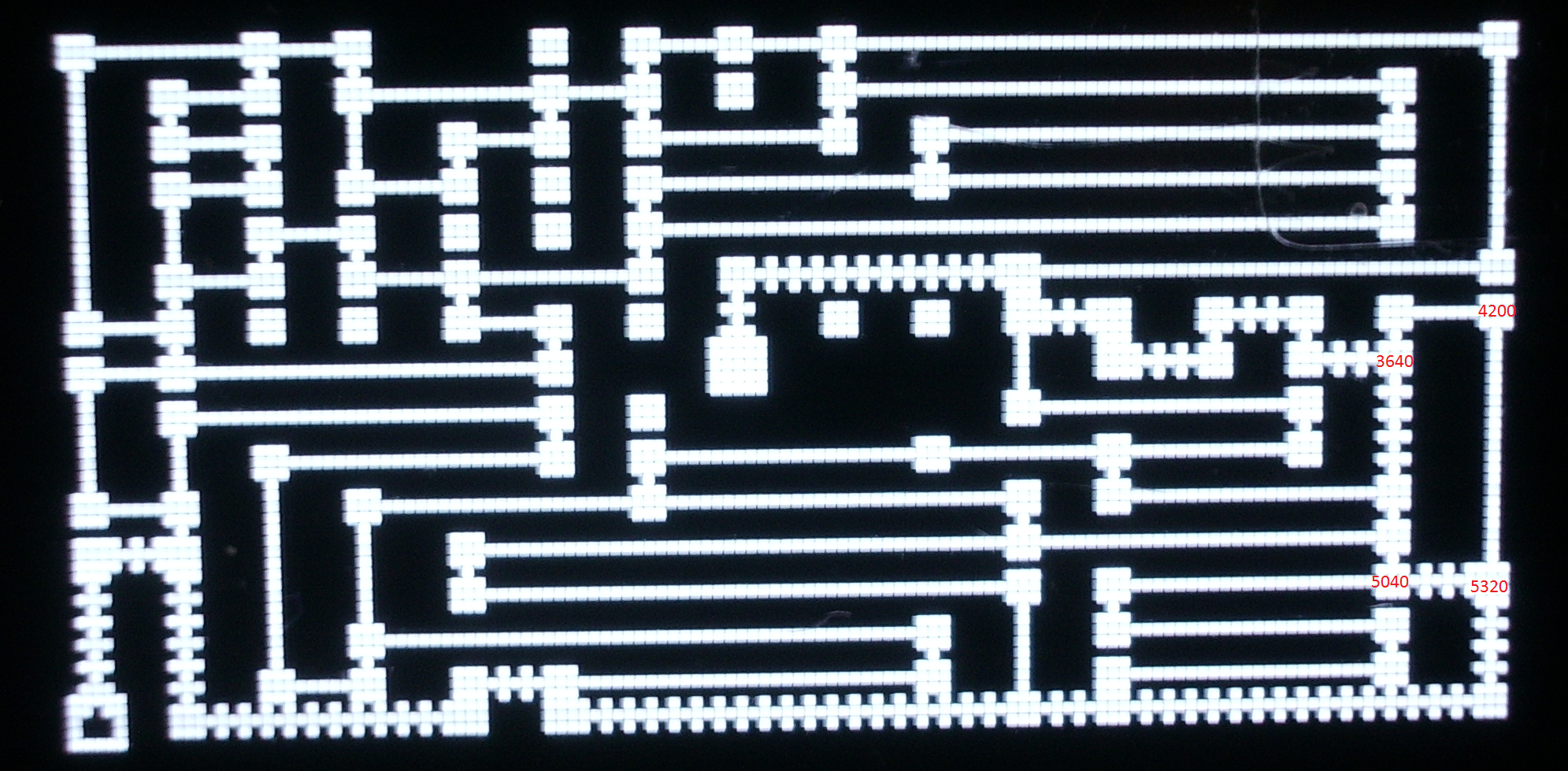 ąÆąŠčé čĆąĄąĘčāą╗čīčéą░čé čĆą░ą▒ąŠčéčŗ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ - ąĮą░ą╣ą┤ąĄąĮąĮčŗą╣ ą║čĆą░čéčćą░ą╣čłąĖą╣ ą┐čāčéčī. ąĪą┐čĆą░ą▓ą░, ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čāąĘą╗ą░čģ čÅ ąĮą░ą┐ąĖčüą░ą╗ ąĘąĮą░č湥ąĮąĖąĄ čĆą░čüčüč鹊čÅąĮąĖą╣ ą┤ą╗čÅ ą┐čĆąĖą╝ąĄčĆą░. ąś ą▓ąŠčé, čüą║ą░ąČąĄą╝ čÅ ą┤ąŠą▒čĆą░ą╗čüčÅ ą┤ąŠ čāąĘą╗ą░ ą┐ąŠą╝ąĄč湥ąĮąĮąŠą│ąŠ 5320. ą×čé ąĮąĄą│ąŠ ąĄčüčéčī ą┤ą▓ąĄ ą┤ąŠčĆąŠą│ąĖ "ą▓ąĮąĖąĘ": ąĮą░ č鹊čćą║čā 4200 ąĖ 5040. ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą▓čŗą▒čĆą░ą╗ą░ 5040, ą░ ąĮąĄ ą▒ąŠą╗ąĄąĄ ąĮąĖąĘą║čāčÄ 4200. ąóą░ą║ ą║ą░ą║ 4200 ą▓čüąĄą│ąŠ ąĮą░ 4 ą║ą╗ąĄč鹊čćą║ąĖ ąĮąĖąČąĄ (čéą░ą║ ą║ą░ą║ čÅ čüą┤ąĄą╗ą░ą╗ ą┤ą╗ąĖąĮčā ąŠą┤ąĮąŠą╣ ą║ą╗ąĄč鹊čćą║ąĖ 280), ąĮąŠ ą┤ąŠ ąĮąĄčæ ąĮą░ą┤ąŠ ąĖą┤čéąĖ čåąĄą╗čŗčģ 6 ą║ą╗ąĄč鹊č湥ą║. ąÆ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ 5040 ąĮąĖąČąĄ ąĮą░ ąŠą┤ąĮčā ą║ą╗ąĄč鹊čćą║čā ąĖ ąĖą┤čéąĖ ą┤ąŠ ąĮąĄčæ č鹊ąČąĄ č鹊ą╗čīą║ąŠ ąŠą┤ąĮčā ą║ą╗ąĄč鹊čćą║čā (ąĮąĄ ąĘą░ą▒čŗą▓ą░ąĄą╝, čćč鹊 ą║ą░čĆčéąĖąĮą║ą░ čĆą░čüčéčÅąĮčāčéą░ ą┐ąŠ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗ąĖ. Aspect ratio 2:1). ąÆ ąŠą▒čēąĄą╝, čÅ ą┐ąŠą║ą░ čĆąĄąĘčāą╗čīčéą░č鹊ą╝ ą┤ąŠą▓ąŠą╗ąĄąĮ. ąóąĄą┐ąĄčĆčī ąĮą░ą┤ąŠ ą▓ čŹč鹊čé ą║ąŠą┤ ą▓čüčéčĆąŠąĖčéčī ą▓ąĄčü ą┐čĆąŠčģąŠą┤ą░ č湥čĆąĄąĘ čāąĘąĄą╗ ą┐čĆčÅą╝ąŠ ąĖ čü ą┐ąŠą▓ąŠčĆąŠč鹊ą╝. ąóąŠą│ą┤ą░ čāą▓ąĖą┤ąĖą╝, čćč鹊 ąŠą┐čéąĖą╝ą░ą╗čīąĮčŗą╝ ą╝ąŠąČąĄčé ąŠą║ą░ąĘą░čéčīčüčÅ ą┤čĆčāą│ąŠą╣ ą╝ą░čĆčłčĆčāčé. |
|
| ąĪčéčĆą░ąĮąĖčåą░ 6 ąĖąĘ 14 | ą¦ą░čüąŠą▓ąŠą╣ ą┐ąŠčÅčü: UTC + 3 čćą░čüą░ |
| Powered by phpBB © 2000, 2002, 2005, 2007 phpBB Group http://www.phpbb.com/ |
|