|
ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
 
|
ąĪčéčĆą░ąĮąĖčåą░ 425 ąĖąĘ 475
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 9490 ] |
... , , , , , , ... |
| ąÉą▓č鹊čĆ |
ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
fivist

|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow  ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ č乥ą▓ 22, 2021 18:42:03 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤ąĮ ąĖčÄąĮ 09, 2014 02:52:53
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąöąŠą▒čĆąŠą│ąŠ ą┤ąĮčÅ. ąĪč鹊ą╗ą║ąĮčāą╗čüčÅ čü ą┐čĆąŠą▒ą╗ąĄą╝ąŠą╣ ąĮą░ čüą▓ąŠąĄą╣ čāčüčéą░ąĮąŠą▓ą║ąĄ. ąĀąĄčłąĖą╗ ąĮą░ ąĮąĄąĄ ą┐ąŠčüčéą░ą▓ąĖčéčī ą║ą░ą╝ąĄčĆčā. ąöąŠ čŹč鹊ą│ąŠ ą┐ą╗ą░čéą║ąĖ ą┤ąĄą╗ą░ą╗, ąĮąŠ ą▓čüąĄą│ą┤ą░ ąŠą┤ąĮąŠčüč鹊čĆąŠąĮąĮąĖąĄ, ą░ ą┐čĆąĖą▓čÅąĘčŗą▓ą░ą╗čüčÅ ą║ ąĮą░čćą░ą╗čā č鹥ą║čüč鹊ą╗ąĖčéą░ ą┐ąŠ č鹊čćą║ąĄ ą╗ą░ąĘąĄčĆą░ ą▓ čāą│ąŠą╗, ąĘą░čģąŠą┤ąĖą╗ ą▓ "ąÜąÉą£ąĢąĀąÉ" ąĖ čéą░ą╝ ąĮą░ąČąĖą╝ą░ą╗ čüą▒čĆąŠčü ą║ąŠąŠčĆą┤ąĖąĮą░čé ą▓ 0. ą┐ąĄčĆąĄą┤ čŹčéąĖ ą▓ ąĮą░čüčéčĆąŠą╣ą║ą░čģ ą▓čŗą▒ąĖčĆą░ą╗ ą║ą░ą╝ąĄčĆčā, ą║ąŠč鹊čĆčāčÄ ąĖčüą┐ąŠą╗čīąĘčāčÄ ą┤ą╗čÅ ą▓ąĖą┤ąĄąŠčüą▓čÅąĘąĖ (ąÆą░ą╣ą▒ąĄčĆ, ąĪą║ą░ą╣ą┐). ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą║ą░ą╝ąĄčĆčŗ (菹Įą┤ąŠčüą║ąŠą┐), čćą░čüč鹊 ąŠčéą▓ą░ą╗ąĖą▓ą░ąĄčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčé ą┐čĆąŠą│ąĖ, čćą░čēąĄ čŹč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą║ąŠą│ą┤ą░ ą║ąŠą│ą┤ą░ ąĮą░ąČąĖą╝ą░čÄ ąĪąæąĀą×ąĪ ą▓ ą┐čĆąĖą▓čÅąĘą║ą░ ą║ čĆąĄą┐ą┐ąĄčĆą░ą╝, ąĖą╗ąĖ ą▓ ąĮą░čüčéčĆąŠą╣ą║ą░čģ čüą╝ąĄčēąĄąĮąĖčÅ - ąĮą░ąČąĖą╝ą░čÄ čüą▒čĆąŠčü - ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčéą║ą╗čÄč湥ąĮąŠ. čéą░ą║ąČąĄ ą▓ ą┐čĆąĖą▓čÅąĘą║ą░čģ ą║ čĆąĄą┐ą┐ąĄčĆą░ą╝, ąĄčüą╗ąĖ ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆą░ąĘ čüą║čĆčŗčéčī ąĖą╗ąĖ ą┐ąŠą║ą░ąĘą░čéčī ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ ą╗ą░ąĘąĄčĆą░ - čŹč鹊 čéą░ą║ąČąĄ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčéą║ą╗čÄč湥ąĮąŠ. ą¦č鹊 čŹč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī. ą▓ąĄčĆčüąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐ąŠčüą╗ąĄą┤ąĮčÅčÅ 0.0.1.74!
ą¤ąŠą┤čüą║ą░ąČąĖč鹥 - ą║ą░ą║ čüą┤ąĄą╗ą░čéčī ąĪąæąĀą×ąĪ ą║ąŠąŠčĆą┤ąĖąĮą░čé ą▓ 0 ą▒ąĄąĘ ąĘą░čģąŠą┤ą░ ą▓ ąÜąÉą£ąĢąĀąÉ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
 |
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
JI_John
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ č乥ą▓ 22, 2021 19:47:16 |
|
ąÜą░čĆą╝ą░: -2
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 13
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąŠą║čé 20, 2011 21:45:16
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 84
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąæčŗą╗ąŠ ą┐ąŠą┤ąŠą▒ąĮąŠąĄ. ąÆ ąĮą░čüčéčĆąŠą╣ą║ą░čģ ą┐ą╗ą░ąĮą░ 菹╗ąĄą║čéčĆąŠą┐ąĖčéą░ąĮąĖčÅ ą▓ą║ą╗čÄčćąĖą╗ ąĘą░ą┐čĆąĄčé ąĮą░ ąŠčéą║ą╗čÄč湥ąĮąĖąĄ USB.
ą×čéą▓ą░ą╗ąĖą▓ą░čéčīčüčÅ ą┐ąĄčĆąĄčüčéą░ą╗ą░.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
fivist
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ č乥ą▓ 22, 2021 19:54:12 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤ąĮ ąĖčÄąĮ 09, 2014 02:52:53
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
JI_John, ąĖąĘąĮą░čćą░ą╗čīąĮąŠ ą▒čŗą╗ ą▓ą║ą╗čÄč湥ąĮ ąĘą░ą┐čĆąĄčé ąĮą░ ąŠčéą║ą╗čÄč湥ąĮąĖąĄ ąŻąĪąæ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
motoAnDrEY14
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ č乥ą▓ 22, 2021 20:35:59 |
|
| ąÆčüčéą░ą╗ ąĮą░ ą╗ą░ą┐čŗ |
 |
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 24
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą╝ą░čĆ 06, 2009 15:29:27
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 93
ą×čéą║čāą┤ą░: ą£ąĖąĮčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
fivist ą┐ąĖčüą░ą╗(ą░): ąŠčéą▓ą░ą╗ąĖą▓ą░ąĄčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčé ą┐čĆąŠą│ąĖ ... čćč鹊 čŹč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī. ąÜą░ą▒ąĄą╗čī, ąĖčüą┐ąŠą╗čīąĘčāą╣ čü 菹║čĆą░ąĮąŠą╝. ą¤ąĖčéą░ąĮąĖąĄ ąĮą░ ą┐ą╗ą░č鹥, ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čüčéą░ą▒ąĖą╗čīąĮąŠąĄ ąĖ čćąĖčüč鹊ąĄ 5 ąÆ, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ą▓ąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ ą┐ąŠčĆčéą░. ą¤ąŠą╝ąĄčģąĖ, ąĖčģ ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī (ąĮą░ą┤ąŠ ą▓čüąĄ ą║ąŠčĆą┐čāčüą░ ą╝ąĄčéą░ą╗ą╗ąĖč湥čüą║ąĖąĄ čłčāąĮčéąĖčĆąŠą▓ą░čéčī). ąŚąĄą╝ą╗čÅąĮčŗčģ ą┐ąĄč鹥ą╗čī ą▒čŗčéčī ąĮąĄ ą┤ąŠą╗ąČąĮąŠ. fivist ą┐ąĖčüą░ą╗(ą░): ą¤ąŠą┤čüą║ą░ąČąĖč鹥 - ą║ą░ą║ čüą┤ąĄą╗ą░čéčī ąĪąæąĀą×ąĪ ą║ąŠąŠčĆą┤ąĖąĮą░čé ą▓ 0 ą▒ąĄąĘ ąĘą░čģąŠą┤ą░ ą▓ ąÜąÉą£ąĢąĀąÉ. ąØąĄ ą┐ąŠąĮčÅą╗, čćč鹊 ąĖą╝ąĄąĄčéčüčÅ ą▓ą▓ąĖą┤čā? ąóą░ą╝ ąĄčüčéčī ąĖąĮčüčéčĆčāą║čåąĖčÅ, ą│ą┤ąĄ ą┐ąŠ ą┐ąŠą▓ąŠą┤čā ą║ą╗ą░ą▓ąĖčł ą▓čüčæ ąĮą░ą┐ąĖčüą░ąĮąŠ: ą”ąĖčéą░čéą░: "ąōąŠčĆčÅčćąĖąĄ" ą║ą╗ą░ą▓ąĖčłąĖ. ąöą╗čÅ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ ąŠą║ąĮą░ ąĖ ąŠą║ąĮą░ ą║ą░ą╝ąĄčĆčŗ.
F1 - ąŻčüčéą░ąĮąŠą▓ą║ą░ ą║ąŠčĆą┤ąĖąĮą░čé čüč鹊ą╗ą░/ą║ą░čĆąĄčéą║ąĖ ą▓ "0" ("ąĪą▒čĆąŠčü" - ąŠą▒ąĮčāą╗čÅąĄčé ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ čüč鹊ą╗ą░ ąĖ ą║ą░čĆąĄčéą║ąĖ.)
F2 - ąŻčüčéą░ąĮąŠą▓ą║ą░ ą║ąŠčĆą┤ąĖąĮą░čé čüč鹊ą╗ą░/ą║ą░čĆąĄčéą║ąĖ ą▓ ą┐ąŠąĘąĖčåąĖčÄ čüą╝ąĄčēąĄąĮąĖčÅ ą▓ąĄą▒ ą║ą░ą╝ąĄčĆčŗ
ą┤ą╗čÅ ą╗ąĄą▓ąŠą│ąŠ čĆąĄą┐ąĄčĆąĮąŠą│ąŠ ąŠčéą▓ąĄčĆčüčéąĖčÅ.
F3 - ąŻčüčéą░ąĮąŠą▓ą║ą░ ą║ąŠčĆą┤ąĖąĮą░čé čüč鹊ą╗ą░/ą║ą░čĆąĄčéą║ąĖ ą▓ ą┐ąŠąĘąĖčåąĖčÄ čüą╝ąĄčēąĄąĮąĖčÅ ą▓ąĄą▒ ą║ą░ą╝ąĄčĆčŗ
ą┤ą╗čÅ ą┐čĆą░ą▓ąŠą│ąŠ čĆąĄą┐ąĄčĆąĮąŠą│ąŠ ąŠčéą▓ąĄčĆčüčéąĖčÅ.
F9 - ąæčŗčüčéčĆą░čÅ ąĘą░ą╗ąĖą▓ą║ą░ ą┐čĆąŠčłąĖą▓ą║ąĖ ą▓ ą£ąÜ. ąśą╝čÅ čäą░ą╣ą╗ą░ ąĘą░ą┤ą░čæčéčüčÅ ą▓čĆčāčćąĮčāčÄ ą▓ INI-čäą░ą╣ą╗ąĄ.
[1-9,0] - ąæčŗčüčéčĆąŠąĄ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ čüą║ąŠčĆąŠčüčéąĖ ą║ą░čĆąĄčéą║ąĖ 100,200,300,400,500,600,700,800,900,1000
Ctrl+[1-9,0] - ąĪą║ąŠčĆąŠčüčéčī čüą▓ąŠą▒ąŠą┤ąĮąŠą│ąŠ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą║ą░čĆąĄčéą║ąĖ 75,100,128,166,215,280,360,470,615,800
ąÜą╗ čāą┐čĆą░ą▓ą╗ ą║čāčĆčüąŠčĆąŠą╝ - ąĪą▓ąŠą▒ąŠą┤ąĮąŠąĄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą║ą░čĆąĄčéą║ąĖ/čüč鹊ą╗ą░.
+Shift - ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą║ą░čĆąĄčéą║ąĖ/čüč鹊ą╗ą░ ąĮą░ 1/4 čłą░ą│ąŠą▓.
+Ctrl - ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą║ą░čĆąĄčéą║ąĖ/čüč鹊ą╗ą░ ąĮą░ 10/40 čłą░ą│ąŠą▓.
+Ctrl+Shift - ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą║ą░čĆąĄčéą║ąĖ/čüč鹊ą╗ą░ ąĮą░ 100/400 čłą░ą│ąŠą▓.
End - ą¤ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą▓ ą┐ąŠąĘąĖčåąĖčÄ X=0, Y=0 ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ čĆąĖčüčāąĮą║ą░ ą┐ą╗ą░čéčŗ.
PgDn - ą¤ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą▓ ą┐ąŠąĘąĖčåąĖčÄ X=Max,Y=0 ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ čĆąĖčüčāąĮą║ą░ ą┐ą╗ą░čéčŗ.
Home - ą¤ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą▓ ą┐ąŠąĘąĖčåąĖčÄ X=0, Y=Max ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ čĆąĖčüčāąĮą║ą░ ą┐ą╗ą░čéčŗ.
PgUp - ą¤ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą▓ ą┐ąŠąĘąĖčåąĖčÄ X=Max,Y=Max ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ čĆąĖčüčāąĮą║ą░ ą┐ą╗ą░čéčŗ.
Ctrl+Whee mouse - ą£ą░čüčłčéą░ą▒ąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ą░čĆčéąĖąĮą║ąĖ ą┐ą╗ą░čéčŗ.
Wheel - ą¤ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą║ą░čĆčéąĖąĮą║ąĖ ą┐ą╗ą░čéčŗ ą┐ąŠ ą▓ąĄčĆčéąĖą║ą░ą╗ąĖ.
Shift+Wheel mouse - ą¤ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą║ą░čĆčéąĖąĮą║ąĖ ą┐ą╗ą░čéčŗ ą┐ąŠ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗ąĖ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąÆčŗą▒ąĖčĆą░ąĄą╝ čüčģąĄą╝čā BMS ą┤ą╗čÅ ąĘą░čĆčÅą┤ą░ ą╗ąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗčģ (LiFePO4) ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓
ą×ą▒čÅąĘą░č鹥ą╗čīąĮčŗą╝ čāčüą╗ąŠą▓ąĖąĄą╝ ą┤ąŠą╗ą│ąŠą╣ ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ Li-FePO4-ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ EVE Energy, čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ BMS-ą╝ąĖą║čĆąŠčüčģąĄą╝. ąøąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗąĄ ąÉąÜąæ ąŠčéą╗ąĖčćą░čÄčéčüčÅ čéą░ą║ąĖą╝ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ, ą║ą░ą║ ą▓čŗčüąŠą║ą░čÅ ą╝ąĮąŠą│ąŠą║čĆą░čéąĮąŠčüčéčī čåąĖą║ą╗ąŠą▓ ąĘą░čĆčÅą┤ą░-čĆą░ąĘčĆčÅą┤ą░, ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▒čŗčüčéčĆąŠą╣ ąĘą░čĆčÅą┤ą║ąĖ, čāčüč鹊ą╣čćąĖą▓ąŠčüčéčī ą║ ą▒čāč乥čĆąĮąŠą╝čā čĆąĄąČąĖą╝čā čĆą░ą▒ąŠčéčŗ ąĖ ą┐čĆąĖąĄą╝ą╗ąĄą╝ą░čÅ čüč鹊ąĖą╝ąŠčüčéčī. ąØąŠ ą┤ą╗čÅ čŹčéąĖčģ ąÉąÜąæ ąŠč湥ąĮčī ą▓ą░ąČąĄąĮ ą║ąŠąĮčéčĆąŠą╗čī ą┐čĆąŠčåąĄčüčüą░ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░ ą┤ą╗čÅ ąĖąĘą▒ąĄą│ą░ąĮąĖčÅ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĘą░čĆčÅą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ 100% ąĘą░čĆčÅą┤ą░. ąśąĮąČąĄąĮąĄčĆčŗ ąÜą×ą£ą¤ąŁąø ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖą╗ąĖ čüą┐ąĖčüąŠą║ čéą░ą║ąĖčģ čĆąĄčłąĄąĮąĖą╣ ąŠčé čĆą░ąĘąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
miklin
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé č乥ą▓ 23, 2021 11:18:53 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤ąĮ ąĖčÄą╗ 18, 2011 06:17:44
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 117
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
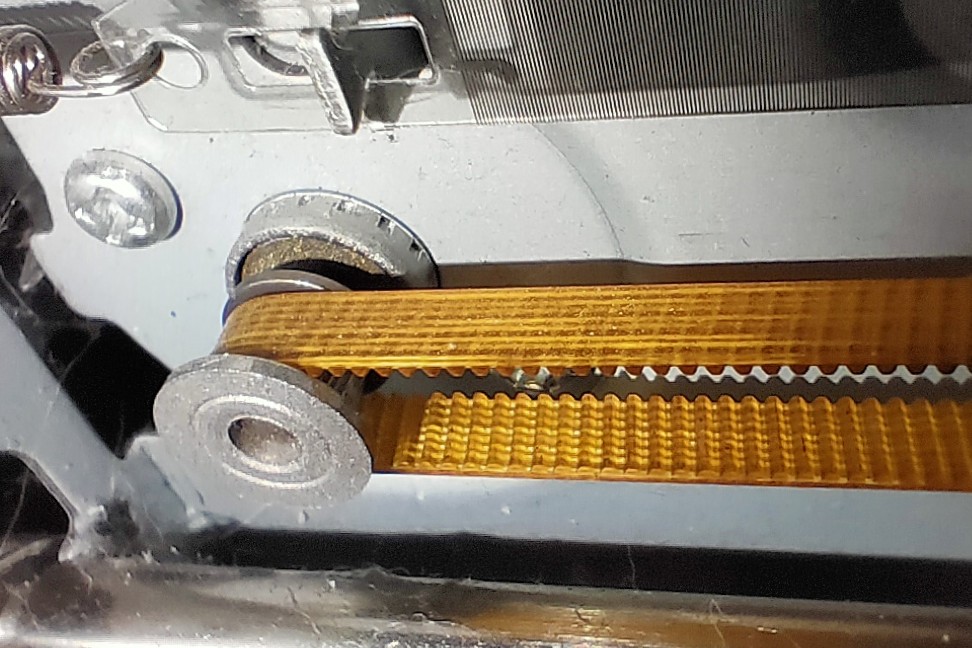
Seriyvolk ,ą▒čāčéčī ą╗čÄą▒ąĄąĘąĄąĮ ą┐ąŠčÅčüąĮąĖ ąĮą░čüčćčæčé GT2 ąĖ ą┐ąŠ čłą║ąĖą▓ą░ą╝.
ąĪčéą░čĆą░čÅ čā ą╝ąĄąĮčÅ ąĮą░ ą┤ąŠąĮą░čĆąĄ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
Seriyvolk

|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé č乥ą▓ 23, 2021 12:54:24 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 93
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2090
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą╝ą░ą╣ 05, 2012 20:19:55
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 4851
ą×čéą║čāą┤ą░: ą£ąĖąĮčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąÉ č湥ą│ąŠ čéčāčé ą┐ąŠčÅčüąĮčÅčéčī? ąæčāą┤čāčé ą┐ąŠą╗ąŠčüčŗ ąĮą░ ą┐ą╗ą░č鹥.
_________________
ą¤čĆąĖą▒ąŠčĆ, ąĘą░čēąĖčēčæąĮąĮčŗą╣ ą┐čĆąĄą┤ąŠčģčĆą░ąĮąĖč鹥ą╗ąĄą╝, čüą│ąŠčĆą░ąĄčé ą┐ąĄčĆą▓čŗą╝, ąĘą░čēąĖčéąĖą▓ ą┐čĆąĄą┤ąŠčģčĆą░ąĮąĖč鹥ą╗čī. ąŚą░ą║ąŠąĮ ą£ąĄčĆčäąĖ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Lecter2017
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé č乥ą▓ 23, 2021 13:19:07 |
|
| ą×ą┐čŗčéąĮčŗą╣ ą║ąŠčé |
 |
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 64
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą╝ą░ą╣ 27, 2017 22:13:51
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 712
ą×čéą║čāą┤ą░: ąØąĖąČąĮąĖą╣ ąØąŠą▓ą│ąŠčĆąŠą┤
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
Seriyvolk, ą░ čćč鹊 ąČąĄ čüčéą░ą▓čÅčé ąĮą░ ą║ą░čĆąĄčéą║čā?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
miklin
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé č乥ą▓ 23, 2021 15:44:24 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤ąĮ ąĖčÄą╗ 18, 2011 06:17:44
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 117
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąóąŠčƹȹĄčüčéą▓ą░ čā ąĮą░čü ąŠčéą╝ąĄąĮąĖą╗ąĖ ąĖ čā ą╝ąĄąĮčÅ ą┐ąŠčÅą▓ąĖą╗ąŠčüčī ą▓čĆąĄą╝čÅ,ą║ą░ą║ ą│ąŠą▓ąŠčĆčÅčé ą┐ąŠčćąĖčéą░čéčī ą▒čāą║ą▓ą░čĆčī.
ąÆčŗą▓ąŠą┤, GT2 ąĮąĄ ąĮąŠčĆą╝ąĖčĆąŠą▓ą░ąĮąĮčŗą╣(čéčÅąĮąĄčéčüčÅ),ąĮą░čéčÅąČąĮąŠą╣ čĆąŠą╗ąĖą║ ą│ą╗ą░ą┤ą║ąĖą╣ čćč鹊ą▒čŗ ąĮąĄ ą│čāą┤ąĄą╗.
ąØčāąČąĮąŠ ąĖčüą║ą░čéčī ąĮąŠčĆą╝ąĖčĆąŠą▓ą░ąĮąĮčŗą╣.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
pvu
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé č乥ą▓ 23, 2021 15:49:35 |
|
| ą×čéą║čĆčŗą╗ ą│ą╗ą░ąĘą░ |
 |
ąÜą░čĆą╝ą░: 2
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 15
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ąĖčÄąĮ 05, 2018 11:11:15
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 55
ą×čéą║čāą┤ą░: ąöąĖą╝ąĖčéčĆąŠą▓ą│čĆą░ą┤
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 4
|
ąÜč鹊 čćč鹊 ąĮą░ą╣ą┤ąĄčé  ąÉ ą▓ ą║菹ĮąŠąĮą░čģ ąĖ čģčīčÄą╗ąĄčéą░čģ čüčéą░ą▓čÅčé čéą░ą║ąŠąĄ:    ąÆąŠčé ąĖą╝ąĄąĮąĮąŠ čćč鹊ą▒ ąĮąĄ ą│čāą┤ąĄą╗ ąĖ ąĮąĄ č鹊ą╗čīą║ąŠ ąĮą░ ą┐ą░čüčüąĖą▓ąĮąŠą╝ čłą║ąĖą▓ąĄ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Seriyvolk
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ č乥ą▓ 24, 2021 20:14:42 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 93
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2090
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą╝ą░ą╣ 05, 2012 20:19:55
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 4851
ą×čéą║čāą┤ą░: ą£ąĖąĮčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
Seriyvolk, ą░ čćč鹊 ąČąĄ čüčéą░ą▓čÅčé ąĮą░ ą║ą░čĆąĄčéą║čā? ąÆąŠčé ą▓čŗčłąĄ č鹊ą▓ą░čĆąĖčē ą▓čüčæ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĮą░ą┐ąĖčüą░ą╗!  ąŻ ą╝ąĄąĮčÅ ą╗ąĖčćąĮąŠ čüąĄą╣čćą░čü čüč鹊ąĖčé ą▓ąŠčé čéą░ą║ąŠą╣ ąČčæą╗č鹥ąĮčīą║ąĖą╣ ą┐ąŠą╗ąĖčāčĆąĄčéą░ąĮąŠą▓čŗą╣ čĆąĄą╝ąĄąĮčī, ą║ą░ą║ ąĮą░ č乊č鹊 ą▓čŗčłąĄ. ą×č湥ąĮčī ą╝čÅą│ą║ąĖą╣ ą┐ąŠ ą╝ą░č鹥čĆąĖą░ą╗čā ąĖ ą┤ąŠą▓ąŠą╗čīąĮąŠ ąČčæčüčéą║ąĖą╣ ąĮą░ čĆą░čüčéčÅąČąĄąĮąĖąĄ ąĖąĘ-ąĘą░ ą░čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ. ą×čé čüąĄą▒čÅ čĆąĖčüčāąĮą║ą░ ąĮą░ ą┐ą╗ą░č鹥 ą┐čĆą░ą║čéąĖč湥čüą║ąĖ ąĮąĄ ąŠčüčéą░ą▓ą╗čÅąĄčé.
_________________
ą¤čĆąĖą▒ąŠčĆ, ąĘą░čēąĖčēčæąĮąĮčŗą╣ ą┐čĆąĄą┤ąŠčģčĆą░ąĮąĖč鹥ą╗ąĄą╝, čüą│ąŠčĆą░ąĄčé ą┐ąĄčĆą▓čŗą╝, ąĘą░čēąĖčéąĖą▓ ą┐čĆąĄą┤ąŠčģčĆą░ąĮąĖč鹥ą╗čī. ąŚą░ą║ąŠąĮ ą£ąĄčĆčäąĖ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Ruzik
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ č乥ą▓ 24, 2021 21:12:40 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 55
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1632
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄąĮ 09, 2011 17:17:47
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 5712
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
Seriyvolk
ąÉ čĆąĄčćčī ą┐čĆąŠ čüč鹊ą╗ ąĖą╗ąĖ ą║ą░čĆąĄčéą║čā?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
zenon
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ č乥ą▓ 24, 2021 21:47:21 |
|
| ąĪą▓ąĄčĆą╗ąĖčé č鹥ą║čüč鹊ą╗ąĖčé ą║ąŠą│čéčÅą╝ąĖ |
 |
ąÜą░čĆą╝ą░: 11
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 157
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ąŠą║čé 23, 2007 10:01:42
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 1273
ą×čéą║čāą┤ą░: ąÆąŠą╗ą│ąŠą│čĆą░ą┤
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Seriyvolk
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ č乥ą▓ 24, 2021 23:47:59 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 93
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2090
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą╝ą░ą╣ 05, 2012 20:19:55
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 4851
ą×čéą║čāą┤ą░: ą£ąĖąĮčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
Seriyvolk
ąÉ čĆąĄčćčī ą┐čĆąŠ čüč鹊ą╗ ąĖą╗ąĖ ą║ą░čĆąĄčéą║čā? ąØčā, ą▓čĆąŠą┤ąĄ, čéą░ą╝ ąČąĄ čÅčüąĮąŠ ąĮą░ą┐ąĖčüą░ąĮąŠ. ąØą░ čüč鹊ą╗ąĄ čā ą╝ąĄąĮčÅ čüą░ą╝ąŠą│ąŠ GT2, ąĖ ąŠąĮ ą┐čĆąĄą║čĆą░čüąĮąŠ čüąĄą▒čÅ čéą░ą╝ čćčāą▓čüčéą▓čāąĄčé. ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 1 minute 36 seconds:ąŻ ą╝ąĄąĮčÅ ąĮą░ ą║ą░čĆąĄčéą║ąĄ GT2 ąöą░ ąĮą░ ąĘą┤ąŠčĆąŠą▓čīąĄ. ąóąŠą╗čīą║ąŠ ą┐ąŠč鹊ą╝ ąĮąĄ čüč鹊ąĖčé čüą┐čĆą░čłąĖą▓ą░čéčī, ąŠčéą║čāą┤ą░ ąĮą░ ą╝ą░čüą║ąĄ ą┐ąŠą╗ąŠčüčŗ.
_________________
ą¤čĆąĖą▒ąŠčĆ, ąĘą░čēąĖčēčæąĮąĮčŗą╣ ą┐čĆąĄą┤ąŠčģčĆą░ąĮąĖč鹥ą╗ąĄą╝, čüą│ąŠčĆą░ąĄčé ą┐ąĄčĆą▓čŗą╝, ąĘą░čēąĖčéąĖą▓ ą┐čĆąĄą┤ąŠčģčĆą░ąĮąĖč鹥ą╗čī. ąŚą░ą║ąŠąĮ ą£ąĄčĆčäąĖ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
miklin
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé č乥ą▓ 25, 2021 03:32:54 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤ąĮ ąĖčÄą╗ 18, 2011 06:17:44
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 117
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąÉ ą║ą░ą║ ąĮą░čüčćčæčé čłą║ąĖą▓ąŠą▓ ąĮą░ ą╝ąŠč鹊čĆ, 16 ąĖą╗ąĖ 20.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
stalnoi
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé č乥ą▓ 25, 2021 09:35:23 |
|
| ą×čéą║čĆčŗą╗ ą│ą╗ą░ąĘą░ |
 |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą╝ą░ą╣ 28, 2009 08:25:41
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 66
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
mial
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé č乥ą▓ 25, 2021 10:13:54 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 94
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2197
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čÅąĮą▓ 06, 2010 23:31:56
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3242
ą×čéą║čāą┤ą░: ąæąŠčĆąŠą▓ąĖčćąĖ, ąØąŠą▓ą│. ąŠą▒ą╗.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
")
|
|
ąŻ ą╝ąĄąĮčÅ GT2, č鹊ąĮą║ąĖą╣. ąóąŠčé čćč鹊 ąĮą░ ą┤ąĄčłąĄą▓čŗąĄ 3ą┤ ą┐čĆąĖąĮč鹥čĆčŗ ąĖą┤ąĄčé. ą£ąŠąČąĄčé čÅ čćč鹊 č鹊 ąĮąĄ ą┤ąŠą│ąŠąĮčÅčÄ, ąĮąŠ ą║ą░ą║ąĖčģ č鹊 ą┐čĆąŠą▒ą╗ąĄą╝ čÅ ąĮąĄ ąĘą░ą╝ąĄčéąĖą╗. ąōąŠą▓ąŠčĆčÄ ą┐čĆąŠ ą┐čĆąĖą▓ąŠą┤ ą║ą░čĆąĄčéą║ąĖ.
_________________
ą¤čĆąŠč鹊čéąĖą┐čŗ ą┐ąĄčćą░čéąĮčŗčģ ą┐ą╗ą░čé ąĮą░ ąĘą░ą║ą░ąĘ https://radiokot.ru/forum/viewtopic.php?f=54&t=122701
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ą║čé315b
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé č乥ą▓ 25, 2021 10:57:00 |
|
| ąØą░čłąĄą╗ čéčĆą░ąĮąĘąĖčüč鹊čĆ. ą¤ąŠąĮčÄčģą░ą╗. |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ąĮąŠčÅ 13, 2009 14:25:04
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 179
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
Seriyvolk
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 1 minute 36 seconds:
[uquote="zenon",url="/forum/viewtopic.php?p=3987172#p3987172"]ąŻ ą╝ąĄąĮčÅ ąĮą░ ą║ą░čĆąĄčéą║ąĄ GT2 ąóąŠą╗čīą║ąŠ ą┐ąŠč鹊ą╝ ąĮąĄ čüč鹊ąĖčé čüą┐čĆą░čłąĖą▓ą░čéčī, ąŠčéą║čāą┤ą░ ąĮą░ ą╝ą░čüą║ąĄ ą┐ąŠą╗ąŠčüčŗ. ąÉ ąŠ ą║ą░ą║ąĖčģ ą┐ąŠą╗ąŠčüą░čģ ąĖą┤čæčé čĆąĄčćčī? ąŻ ą╝ąĄąĮčÅ ą▓ąŠąŠą▒čēąĄ ą▓čüčæ čü ą┐čĆąĖąĮč鹥čĆą░, ąĖ ąĮąĖ č湥ą│ąŠ ąĮąĄ ąĮą░ą▒ą╗čÄą┤ą░čÄ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Ruzik
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé č乥ą▓ 25, 2021 12:12:12 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 55
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1632
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄąĮ 09, 2011 17:17:47
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 5712
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
Seriyvolk ą┐ąĖčüą░ą╗(ą░): ąØčā, ą▓čĆąŠą┤ąĄ, čéą░ą╝ ąČąĄ čÅčüąĮąŠ ąĮą░ą┐ąĖčüą░ąĮąŠ ąóą░ą║ ą╝ąŠąČąĄčé ąŠčłąĖą▒čüčÅ? ąÜą░ą║ čĆąĄą╝ąĄąĮčī ąĮą░ ą║ą░čĆąĄčéą║ąĄ, ą╝ąŠąČąĄčé ą▓ą╗ąĖčÅčéčī ąĮą░ ą┐ąŠą╗ąŠčüą░č鹊čüčéčī (ą║čüčéą░čéąĖ, ą┐ąŠą╗ąŠčüą░č鹊čüčéčī ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮą░čÅ ąĖą╗ąĖ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮą░čÅ?), ąĄčüą╗ąĖ ąĘą░ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą║ą░čĆąĄčéą║ąĖ ąŠčéą▓ąĄčćą░ąĄčé 菹Įą║ąŠą┤ąĄčĆ?. ąóą░ą╝ čģąŠčéčī čĆąĄąĘąĖąĮą║čā ąŠčé čéčĆčāčüąŠą▓ ą┐ąŠčüčéą░ą▓čī ąĖ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī (čĆąĄčćčī ą┐čĆąŠ ą║ą░čĆąĄčéą║čā). 
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
pvu
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé č乥ą▓ 25, 2021 14:13:26 |
|
| ą×čéą║čĆčŗą╗ ą│ą╗ą░ąĘą░ |
|
ąÜą░čĆą╝ą░: 2
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 15
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé ąĖčÄąĮ 05, 2018 11:11:15
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 55
ą×čéą║čāą┤ą░: ąöąĖą╝ąĖčéčĆąŠą▓ą│čĆą░ą┤
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ą©ą░ą│ čĆąĄą╝ąĮčÅ 2ą╝ą╝, ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┐čĆąĖ čüą║ąŠčĆąŠčüčéąĖ čĆąĄą╝ąĮčÅ 1ą╝/čü ąĖą╝ąĄąĄą╝ 500 ą▓čüčéčĆąĄčćčī ąĘčāą▒ą░ čüąŠ čłą║ąĖą▓ąŠą╝ ąĖ ą▓ąĖą▒čĆą░čåąĖčÄ 500ąōčå ą▓ą┤ąŠą╗čī ąŠčüąĖ X. ą¦ąĄą╝ čģčāąČąĄ ą║ą░č湥čüčéą▓ąŠ čłą║ąĖą▓ą░ č鹥ą╝ ą▓čŗčłąĄ ą░ą╝ą┐ą╗ąĖčéčāą┤ą░ ą▓ąĖą▒čĆą░čåąĖąĖ, č湥ą╝ ą▒ą╗ąĖąČąĄ čŹčéą░ čćą░čüč鹊čéą░ ą║ čćą░čüč鹊č鹥 čüąŠą▒čüčéą▓ąĄąĮąĮčŗčģ ą║ąŠą╗ąĄą▒ą░ąĮąĖą╣ čłą░čüčüąĖ č鹥ą╝ čģčāąČąĄ, č湥ą╝ ą▒ą╗ąĖąČąĄ čŹčéą░ čćą░čüč鹊čéą░ ą║ čćą░čüč鹊č鹥 čüąŠą▒čüčéą▓ąĄąĮąĮčŗčģ (čāą┐čĆčāą│ąĖčģ) ą║ąŠą╗ąĄą▒ą░ąĮąĖą╣ ą║ą░čĆąĄčéą║ąĖ = ą║ąŠčĆąĄąĮčī(ą╝ąŠą┤čāą╗čī čāą┐čĆčāą│ąŠčüčéąĖ čĆąĄą╝ąĮčÅ/ą╝ą░čüčüą░ ą║ą░čĆąĄčéą║ąĖ)/2ą┐ąĖ č鹥ą╝ čģčāąČąĄ. ąĢčüą╗ąĖ ą░ą╝ą┐ą╗ąĖčéčāą┤ą░ ą┐čĆąĖą▒ą╗ąĖąĘąĖčéčüčÅ ą║ ąĘą░ą╝ąĄčéąĮąŠą╣ čćą░čüčéąĖ čłą░ą│ą░ ą┐ąŠ X, č鹊 ąĖ ąĮą░ ą║ą░čĆčéąĖąĮą║ąĄ čŹč鹊 ą┐čĆąŠčÅą▓ąĖčéčüčÅ. ąÜą░čĆąĄčéą║čā ą╝ąŠąČąĄčé ą║ąŠą╗ą▒ą░čüąĖčéčī ąĮąĄ č鹊ą╗čīą║ąŠ ą┐ąŠ ąź ąĖ ą┐ąŠą╗ąŠčüčŗ ą┐čĆąĖ čŹč鹊ą╝ ąĮąĄ ąŠą▒čÅąĘą░ąĮčŗ ą▒čŗčéčī čćąĖčüč鹊 "ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮčŗą╝ąĖ"...
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
-= ąÉą╗ąĄą║čüą░ąĮą┤čĆ =-
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé č乥ą▓ 25, 2021 14:58:24 |
|
| ąØą░čłąĄą╗ čéčĆą░ąĮąĘąĖčüč鹊čĆ. ą¤ąŠąĮčÄčģą░ą╗. |
 |
ąÜą░čĆą╝ą░: 2
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 37
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤ąĮ ą┤ąĄą║ 10, 2007 12:19:18
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 172
ą×čéą║čāą┤ą░: ąĪą░ąĮą║čé-ą¤ąĄč鹥čĆą▒čāčĆą│
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąŚą░č湥ą╝ ą▓ąŠąŠą▒čēąĄ čćč鹊-č鹊 ąĖąĘąŠą▒čĆąĄčéą░čéčī? ąÜąŠąĮčüčéčĆčāą║č鹊čĆą░ą╝ąĖ ą┐čĆąĖąĮč鹥čĆąŠą▓ ą▓čüąĄ čŹčéąĖ ą│čĆą░ą▒ą╗ąĖ čāąČąĄ ą┐čĆąŠą╣ą┤ąĄąĮčŗ! ąŻ ą╗čÄą▒ąŠą│ąŠ ą░ą┤ą╝ąĖąĮą░ ąĮą░ą╣ą┤ąĄčéčüčÅ ą┤ąŠčģą╗čŗą╣ ą┐čĆąĖąĮč鹥čĆ ąĘą░ ą▒čāčéčŗą╗ą║čā ą┐ąĖą▓ą░ - ą▒ąĄčĆąĖ ąĖ ą┤ąĄą╗ą░ą╣. ąØąĄ ąĮčĆą░ą▓ąĖčéčüčÅ čłčéą░čéąĮą░čÅ ą║ą░čĆąĄčéą║ą░ - čüą┤ąĄą╗ą░ą╣ čüą▓ąŠčÄ, ą░ čĆąĄą╝ąĄąĮčī ąĖ čłą║ąĖą▓čŗ ą▓ąŠąĘčīą╝ąĖ ąĖąĘ ą┐čĆąĖąĮč鹥čĆą░.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
|
ąĪčéčĆą░ąĮąĖčåą░ 425 ąĖąĘ 475
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 9490 ] |
... , , , , , , ... |
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ |
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: ncbelov ąĖ ą│ąŠčüčéąĖ: 22 |
|
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ
|

|
|