|
ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
 
|
ąĪčéčĆą░ąĮąĖčåą░ 289 ąĖąĘ 476
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 9506 ] |
... , , , , , , ... |
| ąÉą▓č鹊čĆ |
ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
Ruzik

|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow  ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü č乥ą▓ 25, 2018 18:34:29 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 55
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1632
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄąĮ 09, 2011 17:17:47
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 5713
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
psychos ą┐ąĖčüą░ą╗(ą░): ąĄčēčæ ą┐ąŠčģąŠąČąĄ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ą┐ąŠą╗ąĄ 菹║čüą┐ąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ 12*12ą╝ą╝ ąÆ ą║ą░ą║ąŠą╝ čüą╝čŗčüą╗ąĄ? ąÆąŠčé čüą┤ąĄą╗ą░ą╗ ą┐ą╗ą░čéą║čā 3*3 ą╝ą╝.  
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
 |
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
psychos
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü č乥ą▓ 25, 2018 19:13:01 |
|
| ąÆčŗą╝ąŠą│ą░č鹥ą╗čī ą┐čĆąĖą┐ąŠčÅ |
 |
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 171
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čüąĄąĮ 23, 2008 19:36:10
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 538
ą×čéą║čāą┤ą░: ą£ą░ą│ąĮąĖč鹊ą│ąŠčĆčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
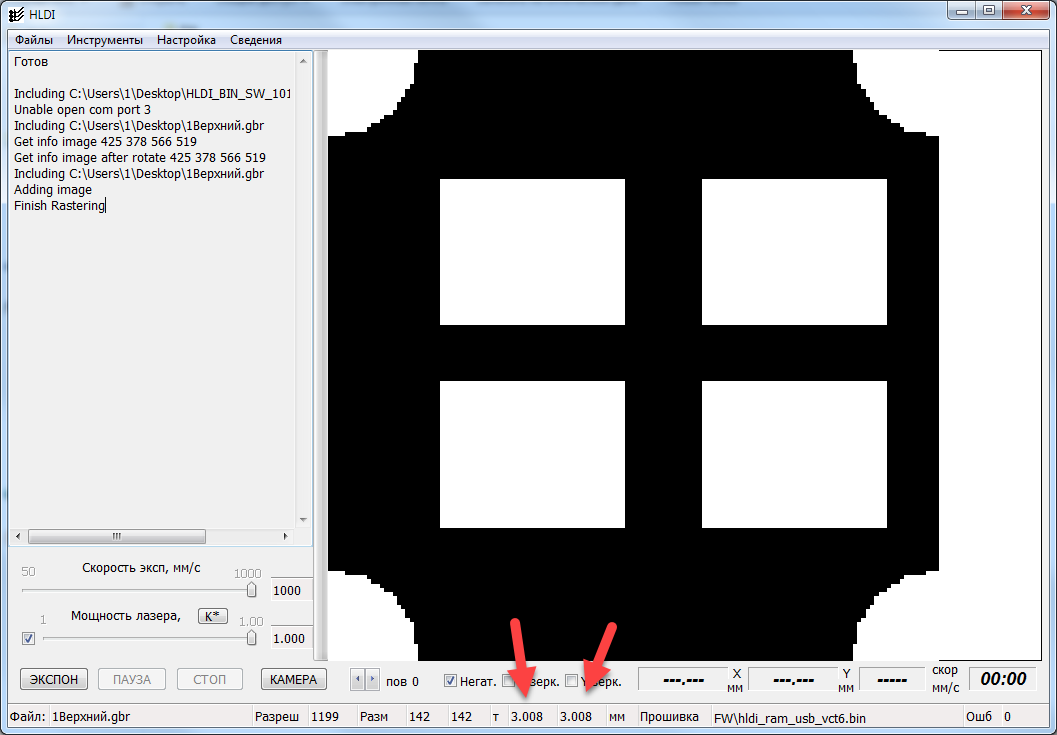
ąĘąĮą░čćąĖčé ą│ą╗čÄą║, ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠ ą┐ąĄčĆąĄąĘą░ą║čĆčŗą╗ ą┐ąĄčĆąĄąŠčéą║čĆčŗą╗,. ąĮąŠčĆą╝
ąĘą░ąĮąŠą▓ąŠ ąŠčéą║čĆčŗą╗... ąŠą┐čÅčéčī 12*12
SW ver 1.019
FW ver 1.07
| ąÆą╗ąŠąČąĄąĮąĖčÅ: |
 top1.zip [715 ą▒ą░ą╣čé]
top1.zip [715 ą▒ą░ą╣čé]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 149
|
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Forward
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü č乥ą▓ 25, 2018 20:12:33 |
|
| ą£čāčćąĖč鹥ą╗čī ą╝ąĖą║čĆąŠčüčģąĄą╝ |
ąÜą░čĆą╝ą░: 11
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 229
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą░ą┐čĆ 20, 2014 14:18:07
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 445
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
psychos ą┐ąĖčüą░ą╗(ą░): ąĘą░ąĮąŠą▓ąŠ ąŠčéą║čĆčŗą╗... ąŠą┐čÅčéčī 12*12 ąöą░ ąĮąĄčé, ą║ą░ą║ ąĖ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī... 
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Ruzik
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü č乥ą▓ 25, 2018 21:28:11 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 55
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1632
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄąĮ 09, 2011 17:17:47
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 5713
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
Forward
ąĀąĄą┐ąĄčĆąŠą▓ čéą░ą╝ ąĮąĄ čģą▓ą░čéą░ąĄčé, č鹊ą│ą┤ą░ ą▒čāą┤ąĄčé č鹊čćąĮąŠ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąÆčŗą▒ąĖčĆą░ąĄą╝ čüčģąĄą╝čā BMS ą┤ą╗čÅ ąĘą░čĆčÅą┤ą░ ą╗ąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗčģ (LiFePO4) ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓
ą×ą▒čÅąĘą░č鹥ą╗čīąĮčŗą╝ čāčüą╗ąŠą▓ąĖąĄą╝ ą┤ąŠą╗ą│ąŠą╣ ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ Li-FePO4-ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ EVE Energy, čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ BMS-ą╝ąĖą║čĆąŠčüčģąĄą╝. ąøąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗąĄ ąÉąÜąæ ąŠčéą╗ąĖčćą░čÄčéčüčÅ čéą░ą║ąĖą╝ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ, ą║ą░ą║ ą▓čŗčüąŠą║ą░čÅ ą╝ąĮąŠą│ąŠą║čĆą░čéąĮąŠčüčéčī čåąĖą║ą╗ąŠą▓ ąĘą░čĆčÅą┤ą░-čĆą░ąĘčĆčÅą┤ą░, ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▒čŗčüčéčĆąŠą╣ ąĘą░čĆčÅą┤ą║ąĖ, čāčüč鹊ą╣čćąĖą▓ąŠčüčéčī ą║ ą▒čāč乥čĆąĮąŠą╝čā čĆąĄąČąĖą╝čā čĆą░ą▒ąŠčéčŗ ąĖ ą┐čĆąĖąĄą╝ą╗ąĄą╝ą░čÅ čüč鹊ąĖą╝ąŠčüčéčī. ąØąŠ ą┤ą╗čÅ čŹčéąĖčģ ąÉąÜąæ ąŠč湥ąĮčī ą▓ą░ąČąĄąĮ ą║ąŠąĮčéčĆąŠą╗čī ą┐čĆąŠčåąĄčüčüą░ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░ ą┤ą╗čÅ ąĖąĘą▒ąĄą│ą░ąĮąĖčÅ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĘą░čĆčÅą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ 100% ąĘą░čĆčÅą┤ą░. ąśąĮąČąĄąĮąĄčĆčŗ ąÜą×ą£ą¤ąŁąø ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖą╗ąĖ čüą┐ąĖčüąŠą║ čéą░ą║ąĖčģ čĆąĄčłąĄąĮąĖą╣ ąŠčé čĆą░ąĘąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
psychos
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü č乥ą▓ 25, 2018 21:32:22 |
|
| ąÆčŗą╝ąŠą│ą░č鹥ą╗čī ą┐čĆąĖą┐ąŠčÅ |
|
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 171
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čüąĄąĮ 23, 2008 19:36:10
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 538
ą×čéą║čāą┤ą░: ą£ą░ą│ąĮąĖč鹊ą│ąŠčĆčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
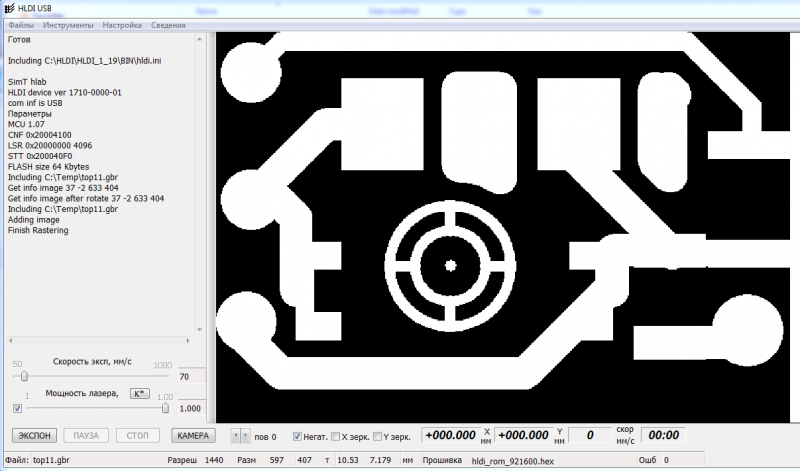
Forward, čüčéčĆą░ąĮąĮąŠ, ą╗ą░ą┤ąĮąŠ, ą╝ą░ą╗ąĄąĮčīą║ą░čÅ ą┐ą╗ą░čéą░ ąĮąĄ čłąĖą▒ą║ąŠ ą▓ą░ąČąĮą░, ą▓ąĄčĆčüąĖąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ č鹥 ąČąĄ ?  ą┐ąĄčĆą▓čŗą╣ ąĘą░čüą▓ąĄčé  ą╗ąĖąĮąĖčÅ 0,2 ą▓ ą┐čĆąŠą╝ąĄąČčāčéą║ąĄ ą╝ąĄąČą┤čā čĆąĄąĘąĖčüč鹊ą╝, č鹊čćą║ą░ 0,2*0,2. čćčāčéčī ą┐ąĄčĆąĄčüą▓ąĄčé, ąĮąŠ čŹč鹊 ąŠčéčüčéčĆąŠąĖą╝. ąśčüą║čĆąĄąĮąĮąĄ ąČąĄą╗ą░čÄ ąĘą┤ąŠčĆąŠą▓čīčÅ ą░ą▓č鹊čĆčā, ą╝ąĮąŠą│ąŠčāą▓ą░ąČą░ąĄą╝ąŠą╝čā AlphaCrow(ą┐čĆąŠčüčéąĖ, ąĮąĄ ąĘąĮą░čÄ čĆąĄą░ą╗čīąĮąŠą│ąŠ ąĖą╝ąĄąĮąĖ), ą░ čéą░ą║ ąČąĄ ą▓čüąĄą╝ ą║č鹊 ą┤ąŠą┐ąĖą╗ąĖą▓ą░ą╗, ą┤ąŠą▓ąŠą┤ąĖą╗ ąĖą┤ąĄčÄ ą┤ąŠ čāą╝ą░, ą░ čéą░ą║ ąČąĄ ą▓ą░čłąĖą╝ čüąĄą╝čīčÅą╝. ąæą╗ą░ą│ąŠą┤ą░čĆčÅ ą▓čüąĄą╝ ąĮą░ą╝, ą▒čāą┤ąĄčé čā ąĮą░čü ą▓čüčæ čģąŠčĆąŠčłąŠ, ą▓ ąĮą░čłąĄą╝ ą│ąŠčüčāą┤ą░čĆčüčéą▓ąĄ, ąĮą░ ąĮą░čłąĄą╣ ąĘąĄą╝ą╗ąĄ. ą×čé čüąĄą▒čÅ: ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ čĆąĄą░ą╗ąĖąĘčāčÄ ąĖą┤ąĄčÄ čü ą┐ąŠą╗ąĖą│ąŠąĮą░ą╗čīąĮčŗą╝ ąĘąĄčĆą║ą░ą╗ąŠą╝(ąĮą░ą┤ąŠ čüčéčĆąĄą╝ąĖčéčüčÅ ą║ čāčüąŠą▓ąĄčĆčłąĄąĮčüčéą▓ąŠą▓ą░ąĮąĖčÄ). č乊čéąĖą║ ą┤ąĄčéąĖ ą║čā ą┤ą░ č鹊 čüčģąŠčĆąŠąĮąĖą╗ąĖ, ąĮą░ą╣ą┤čā, ąŠčéč乊čéą║ą░čÄ čāčüčéą░ąĮąŠą▓ą║čā. ąØčāąČąĮąŠ čĆąĄčłą░čéčī č鹥ą┐ąĄčĆčī ą▓ąŠą┐čĆąŠčü ą┐čĆąĖąČąĖą╝ą░ ą┐ą╗ą░čéčŗ, čé.ą║. ąĮąĄčĆąŠą▓ąĮąŠčüčéčī ąŠč湥ąĮčī čģąŠčĆąŠčłąŠ ą┤ą░čæčé ąŠ čüąĄą▒ąĄ ąĘąĮą░čéčī. ą×čé ą╗ąĖąĮąĘčŗ ą┤ąŠ ą┐ą╗ą░čéčŗ 28ą╝ą╝, ąĮą░ą┤ąŠ ąĮą░ą▓ąĄčĆąĮąŠ čĆą░ąĘą░ ą▓ 2-2,5 čāą▓ąĄą╗ąĖčćąĖčéčī čĆą░čüčüč鹊čÅąĮąĖąĄ, čćč鹊ą▒čŗ čāą▓ąĄą╗ąĖčćąĖčéčī ą┤ą╗ąĖąĮčā č乊ą║čāčüą░, ąĖąĮą░č湥 ąĖčüą║čĆąĖą▓ą╗ąĄąĮąĖčÅ č鹥ą║čüč鹊ą╗ąĖčéą░ ą▓ąĖą┤ąĮąŠ ąŠč湥ąĮčī čģąŠčĆąŠčłąŠ ą┐ąŠ čĆą░ąĘą╝čŗč鹊čüčéąĖ čĆąĖčüčāąĮą║ą░, ąĮąŠ čŹč鹊 čāąČąĄ ąĮą░ ą▓č鹊čĆąŠą╣ ą▓ąĄčĆčüąĖąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ čü ąČąĄčüčéą║ąŠą╣ ą║ą░čĆąĄčéą║ąŠą╣, čé.ą║. čĆą░čüčüč鹊čÅąĮąĖąĄ ą▒ąŠą╗čīčłąĄ, ą▓čŗčłąĄ čéčĆąĄą▒ąŠą▓ąĮąĖčÅ ą║ ą╝ąĄčģą░ąĮąĖą║ąĄ. ą║čüčéą░čéąĖ, ąĖąĮč鹥čĆąĄčüąĮąŠ, ą║ąŠą│ą┤ą░ čüą▓ąĄčéąĖą╗, ą┐ąŠą┤ą▒ąĖčĆą░ą╗ ą▓čŗą┤ąĄčƹȹ║čā, ąĘą░čüą▓ąĄč湥ąĮąĮčŗąĄ čāčćą░čüčéą║ąĖ čćčāčéčī čćčāčéčī ą┐čĆąŠčÅą▓ą╗čÅą╗ąĖ čĆąĖčüčāąĮąŠą║, ą┤čāą╝ą░ą╗ čüą╝ąŠąĄčéčüčÅ, ą░ąĮ ąĮąĄčé, ą┐ąŠčģąŠąČąĄ ąŻąż ą╗ą░ą╝ą┐čŗ ą▒ąŠą╗ąĄąĄ ą┐čĆąŠčÅą▓ą╗čÅčÄčé čĆąĖčüčāąĮąŠą║ ąĮąŠ čģčāąČąĄ ą┐ąŠą╗ąĖą╝ąĄčĆąĖąĘčāčÄčé č乊č鹊čĆąĄąĘąĖčüčé. ą╝ąŠąČąĄčé čÅ ąĮąĄ ą┐čĆą░ą▓, ąĮąŠ čüą╗ąŠąČąĖą╗ąŠčüčī čéą░ą║ąŠąĄ ą▓ą┐ąĄčćą░čéą╗ąĄąĮąĖąĄ.
| ąÆą╗ąŠąČąĄąĮąĖčÅ: |
_del4.jpg [22.22 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 1531
|
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
Forward
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü č乥ą▓ 25, 2018 21:56:28 |
|
| ą£čāčćąĖč鹥ą╗čī ą╝ąĖą║čĆąŠčüčģąĄą╝ |
ąÜą░čĆą╝ą░: 11
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 229
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą░ą┐čĆ 20, 2014 14:18:07
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 445
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
psychos ą┐ąĖčüą░ą╗(ą░): ą▓ąĄčĆčüąĖąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ č鹥 ąČąĄ ? ąöą░. ąŁč鹊 ą▓ąĖą┤ąĮąŠ čüą╗ąĄą▓ą░ ą▓ ąŠą║ąĮąĄ ą╗ąŠą│ą░. psychos ą┐ąĖčüą░ą╗(ą░): ą┐ąĄčĆą▓čŗą╣ ąĘą░čüą▓ąĄčé ąöąŠą▒čĆąŠ ą┐ąŠąČą░ą╗ąŠą▓ą░čéčī ąĮą░ ą▒ąŠčĆčé  Ruzik ą┐ąĖčüą░ą╗(ą░): ąĀąĄą┐ąĄčĆąŠą▓ čéą░ą╝ ąĮąĄ čģą▓ą░čéą░ąĄčé ąŁč鹊 ąŠč湥ą▓ąĖą┤ąĮąŠ 
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Uselock
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ č乥ą▓ 26, 2018 00:29:59 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé čÅąĮą▓ 16, 2009 23:27:49
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 64
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
psychos, ą░ čÅ čüąĄą│ąŠą┤ąĮčÅ ą┐ąŠą▒ąĄą┤ąĖą╗ ą║ą░ą╝ąĄčĆčā. ąŚą░čĆą░ą▒ąŠčéą░ą╗ą░. ąöąĄą╗ąŠ ą▓ č鹊ą╝, čćč鹊 ą▓ ą╝ąŠąĄą╝ ą┐čĆąĖąĮč鹥čĆąĄ ą▒čŗą╗ąŠ 2 čłą╗ąĄą╣čäą░, čüą╗ąŠąČąĄąĮąĮčŗčģ ą▓ą╝ąĄčüč鹥. ą» ąŠą┤ąĖąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ ą┐ąŠą┤ 菹Įą║ąŠą┤ąĄčĆ ąĖ ą║ą░ą╝ąĄčĆčā, ą░ ą▓č鹊čĆąŠą╣ ą┐ąŠą┤ ą┐ąĖčéą░ąĮąĖąĄ ą╗ą░ąĘąĄčĆą░ ąĖ 菹║čĆą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ąĘąĄą╝ą╗ąĄą╣ ą┐ąĄčĆą▓ąŠą│ąŠ. ąóą░ą║ ą▓ąŠčé, ąĮąĄ čĆą░ą▒ąŠčéą░ą╗ąŠ ąĖą╝ąĄąĮąĮąŠ ąĖąĘ-ąĘą░ 菹║čĆą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą╗ąĖąĮąĖą╣ D+, D- ą▓č鹊čĆčŗą╝ čłą╗ąĄą╣č乊ą╝. ą¤ąĄčĆąĄą▒ą┤ąĄą╗ čü ąĘąĄą╝ą╗ąĄą╣, čéą░ą║ čüą║ą░ąĘą░čéčī. ąŻą▒čĆą░ą╗ čłą╗ąĄą╣čä ą╗ą░ąĘąĄčĆą░ čüąŠą▓čüąĄą╝, ą╗ą░ąĘąĄčĆ ąĖ ą▓čüąĄ ąŠčüčéą░ą╗čīąĮąŠąĄ ą┐čāčüčéąĖą╗ ą┐ąŠ ąŠčüčéą░ą▓čłąĄą╝čāčüčÅ. ąÆčāą░ą╗čÅ! ąÆčüąĄ čĆą░ą▒ąŠčéą░ąĄčé. ą¤čĆąĖč湥ą╝, ą▓čüąĄ ą┐čĆąŠą▓ąŠą┤ą░ą╝ąĖ ąĮą░ ą╝ą░ą║ąĄčéą║ąĄ. ąĪąĄą╣čćą░čü ą▓ čłą╗ąĄą╣č乥 ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ąĖ ą║ ą║ą░ą╝ąĄčĆąĄ ą▓čŗą│ą╗čÅą┤čÅčé čéą░ą║: GND,GND,D+,D-,GND,GND,+5V. ą©ą░čüčüąĖ ąĮą░ ą▓čüčÅą║ąĖą╣ čüą╗čāčćą░ą╣ č鹊ąČąĄ ąĘą░ąĘąĄą╝ą╗ąĖą╗. ą¤ąŠą┐čĆąŠą▒čāą╣č鹥 ąĖ čāą┤ąĖą▓ąĖč鹥 čüą▓ąŠąĄą│ąŠ ą┤čĆčāą│ą░)
ąÆąŠčé ą▓čŗą╣ą┤čā čü ą▒ąŠą╗čīąĮąĖčćąĮąŠą│ąŠ, ą║čāą┐ą╗čÄ č乊č鹊čĆąĄąĘąĖčüčé ąĖ ą▒čāą┤čā č鹊ąČąĄ ą┐čĆąŠą▒ąŠą▓ą░čéčī.
ąŻ ą╝ąĄąĮčÅ ąĄčüčéčī ą┐ą░čĆčā ą▓ąŠą┐čĆąŠčüąŠą▓ ą║ ąĘąĮą░čÄčēąĖą╝
1) ą║ą░ą║čāčÄ čćą░čüč鹊čéčā ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą┤ąŠą╗ąČąĄąĮ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆ ą╗ą░ąĘąĄčĆą░? ąÆ č鹥ą╝ąĄ ąĖčüą║ą░ą╗ - ą║č鹊 ą│ąŠą▓ąŠčĆąĖčé 150 ą║ąōčå, ą║č鹊 - 25 ą║ąōčå. ąśčüą┐ąŠą╗čīąĘčāčÄ ą┐ąŠą║ą░ ąĮąĄąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąĮčāčÄ čćą░čüčéčī LM298N ą┤čĆą░ą╣ą▓ąĄčĆą░ ą║ą░čĆąĄčéą║ąĖ. ą×ąĮą░ ą┤ąŠ 40 ą║ąōčå.
2) ą▓ąŠąĘą╝ąŠąČąĮąŠ ą╗ąĖ č鹥ą┐ąĄčĆčī ąŠą▒ąĮąŠą▓ą╗čÅčéčī ą┐čĆąŠčłąĖą▓ą║čā č湥čĆąĄąĘ USB ąĖą╗ąĖ čĆą░ąĘčŖąĄą╝ UART ą╗čāčćčłąĄ ąŠčüčéą░ą▓ąĖčéčī?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Forward
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ č乥ą▓ 26, 2018 01:32:08 |
|
| ą£čāčćąĖč鹥ą╗čī ą╝ąĖą║čĆąŠčüčģąĄą╝ |
ąÜą░čĆą╝ą░: 11
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 229
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą░ą┐čĆ 20, 2014 14:18:07
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 445
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
Uselock ą┐ąĖčüą░ą╗(ą░): ą║ą░ą║čāčÄ čćą░čüč鹊čéčā ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą┤ąŠą╗ąČąĄąĮ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆ ą╗ą░ąĘąĄčĆą░? ą¤čĆąŠčüč鹊ą╣ ą╝ąĄčģą░ąĮąĖąĘą╝ čĆą░čüč湥čéą░. ąÆčĆąĄą╝čÅ ąĮą░čģąŠąČą┤ąĄąĮąĖčÅ ą╗ą░ąĘąĄčĆą░ ąĮą░ą┤ "č鹊čćą║ąŠą╣" ąĘą░čüą▓ąĄčéą║ąĖ ą┐čĆąĖ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą║ą░čĆąĄčéą║ąĖ 1000 ą╝ą╝/čü ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖąĖ 720 č鹊č湥ą║/ą┤čÄą╣ą╝ čüąŠčüčéą░ą▓ą╗čÅąĄčé čćčāčéčī ą▒ąŠą╗ąĄąĄ 35 ą╝ą║čü. ąöą╗čÅ č鹊ą│ąŠ čćč鹊ą▒čŗ čĆą░čüčüąŠą│ą╗ą░čüąŠą▓ą░ąĮąĖąĄ ą┐čĆąĖ ą┐čĆčÅą╝ąŠą╝ ąĖ ąŠą▒čĆą░čéąĮąŠą╝ ą┐čĆąŠčģąŠą┤ąĄ ąĮąĄ ą┐čĆąĄą▓čŗčłą░ą╗ąŠ, čüą║ą░ąČąĄą╝, 10%, ąĘą░ą┤ąĄčƹȹ║ą░ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą╗ą░ąĘąĄčĆą░ ąĮąĄ ą┤ąŠą╗ąČąĮą░ ą┐čĆąĄą▓čŗčłą░čéčī 35/10/2 = 1,75 ą╝ą║čü. ą× ą║ą░ą║ąĖčģ 150 ą║ąōčå ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą╗ą░ąĘąĄčĆą░ ą╝ąŠąČąĄčé ąĖą┤čéąĖ čĆąĄčćčī?  ąŁčéąĖ čćąĖčüą╗ą░ (150 ąĖ 25 ą║ąōčå) ąŠčéąĮąŠčüčÅčéčüčÅ ą║ čćą░čüč鹊č鹥 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąŠčé 菹Įą║ąŠą┤ąĄčĆą░, čé.ąĄ. ą║ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą╝ąĄčłąĄąĮąĖčÅ ą║ą░čĆąĄčéą║ąĖ ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ, ą░ ąĮąĄ ą║ ą║čĆčāčéąĖąĘąĮąĄ čäčĆąŠąĮč鹊ą▓ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą╗ą░ąĘąĄčĆą░. Uselock ą┐ąĖčüą░ą╗(ą░): ą▓ąŠąĘą╝ąŠąČąĮąŠ ą╗ąĖ č鹥ą┐ąĄčĆčī ąŠą▒ąĮąŠą▓ą╗čÅčéčī ą┐čĆąŠčłąĖą▓ą║čā č湥čĆąĄąĘ USB ąöą░
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
mr_kot
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ č乥ą▓ 26, 2018 07:23:14 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 18
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1121
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ąĮąŠčÅ 27, 2009 18:12:27
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 4625
ą×čéą║čāą┤ą░: ą¦ąĄčĆą║ą░čüčüčŗ, UA
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
Uselock ą┐ąĖčüą░ą╗(ą░): ą▓ąŠąĘą╝ąŠąČąĮąŠ ą╗ąĖ č鹥ą┐ąĄčĆčī ąŠą▒ąĮąŠą▓ą╗čÅčéčī ą┐čĆąŠčłąĖą▓ą║čā č湥čĆąĄąĘ USB ąöą░ ąśąĮč鹥čĆąĄčüąĮąŠ, ą║ą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝? Flash Loader Demonstrator čłčīąĄčé č湥čĆąĄąĘ UART, ST-Link - č湥čĆąĄąĘ SWD. ąÉ ą┐ąŠ USB ą║ą░ą║? ąśą╗ąĖ čÅ č湥ą│ąŠ-č鹊 ąĮąĄ ąĘąĮą░čÄ?
_________________

ąÆ ą╝ąĖčĆąĄ ąĮąĄčé ą▓čĆąĄą┤ąĮčŗčģ ą▓ąĄčēąĄčüčéą▓, ą▓ ą╝ąĖčĆąĄ ąĄčüčéčī ą▓čĆąĄą┤ąĮčŗąĄ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ┬® ąö.ąś.ą£ąĄąĮą┤ąĄą╗ąĄąĄą▓
ąÜąŠą│ą┤ą░ ąĮą░ č乊čĆčāą╝ąĄ ą┐ąĄčĆąĄčģąŠą┤čÅčé ąĮą░ "ąÆčŗ", ą▓ čĆąĄą░ą╗čīąĮąŠą╣ ąČąĖąĘąĮąĖ čāąČąĄ ą┤ą░ą▓ąĮąŠ ą▒čīčÄčé ą╝ąŠčĆą┤čā ┬® ą░ą▓č鹊čĆ ąĮąĄąĖąĘą▓ąĄčüč鹥ąĮ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
mial
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ č乥ą▓ 26, 2018 07:29:24 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 94
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2197
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ čÅąĮą▓ 06, 2010 23:31:56
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3242
ą×čéą║čāą┤ą░: ąæąŠčĆąŠą▓ąĖčćąĖ, ąØąŠą▓ą│. ąŠą▒ą╗.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 3
ą£ąĄą┤ą░ą╗ąĖ: 1
")
|
mr_kot ąĮąĄ ąĘąĮą░ąĄčłčī ąÆ ąĮąŠą▓ąŠą╣ ą▓ąĄčĆčüąĖąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĖ ą┐čĆąŠčłąĖą▓ą║ąĖ, ąĄčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĘą░ą╗ąĖčéčī ąĮąŠą▓čāčÄ ą┐čĆąŠčłąĖą▓ą║čā č湥čĆąĄąĘ čüą░ą╝čā HLDI.
_________________
ą¤čĆąŠč鹊čéąĖą┐čŗ ą┐ąĄčćą░čéąĮčŗčģ ą┐ą╗ą░čé ąĮą░ ąĘą░ą║ą░ąĘ https://radiokot.ru/forum/viewtopic.php?f=54&t=122701
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
mr_kot
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ č乥ą▓ 26, 2018 08:37:32 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 18
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1121
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ąĮąŠčÅ 27, 2009 18:12:27
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 4625
ą×čéą║čāą┤ą░: ą¦ąĄčĆą║ą░čüčüčŗ, UA
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą»čüąĮąŠ, čüą┐ą░čüąĖą▒ąŠ. ą» ąĮąŠą▓čŗąĄ ą┐čĆąŠčłąĖą▓ą║ąĖ (č鹥 čćč鹊 USB) ąĄčēąĄ ąĮąĄ ą┐čĆąŠą▓ąĄčĆčÅą╗. ąöą░ą╗ čüą▓ąŠą╣ ą┐čĆąĖąĮč鹥čĆ ą┐ąŠčĹʹ░čéčī č鹊ą▓ą░čĆąĖčēčā, ą░ čā ąĮąĄą│ąŠ ą▒ąŠą╝ą▒ąŠąĮčāą╗ąĖ ą│ą░čĆą░ąČ  ą£ą░čłąĖąĮčā ąĮąĄ čéčĆąŠąĮčāą╗ąĖ, ąĘą░ą▒čĆą░ą╗ąĖ ąĖąĮčüčéčĆčāą╝ąĄąĮčé, ą▓čüčÅą║čāčÄ ą╝ąĄą╗ąŠč湥ą▓ą║čā. ąś ą╝ąŠą╣ ą┐čĆąĖąĮč鹥čĆ čü ąĄą│ąŠ ąĮąŠčāč鹊ą╝ čāčłąĄą╗... ąÆ ąŠą▒čēąĄą╝-č鹊 ą┐čĆąĖąĮč鹥čĆ ąĮąĄ ąŠč湥ąĮčī ąĖ ąČą░ą╗ą║ąŠ - čüą▒ąŠčĆą░ąĮ ą▒čŗą╗ ąĖąĘ ą│*ą▓ąĮą░ ąĖ ą┐ą░ą╗ąŠą║. ąźąŠčéčÅ ą▓čüąĄ ąČąĄ ą┤ąŠą▓ąŠą╗čīąĮąŠ čüąĮąŠčüąĮąŠ čĆą░ą▒ąŠčéą░ą╗. ąóą░ą║ čćč鹊 čÅ čüąĄą╣čćą░čü ą▓ ą┐čĆąŠčåąĄčüčüąĄ ąĖąĘą│ąŠč鹊ą▓ą╗ąĄąĮąĖčÅ ąĮąŠą▓ąŠą│ąŠ.
_________________
ąÆ ą╝ąĖčĆąĄ ąĮąĄčé ą▓čĆąĄą┤ąĮčŗčģ ą▓ąĄčēąĄčüčéą▓, ą▓ ą╝ąĖčĆąĄ ąĄčüčéčī ą▓čĆąĄą┤ąĮčŗąĄ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ┬® ąö.ąś.ą£ąĄąĮą┤ąĄą╗ąĄąĄą▓
ąÜąŠą│ą┤ą░ ąĮą░ č乊čĆčāą╝ąĄ ą┐ąĄčĆąĄčģąŠą┤čÅčé ąĮą░ "ąÆčŗ", ą▓ čĆąĄą░ą╗čīąĮąŠą╣ ąČąĖąĘąĮąĖ čāąČąĄ ą┤ą░ą▓ąĮąŠ ą▒čīčÄčé ą╝ąŠčĆą┤čā ┬® ą░ą▓č鹊čĆ ąĮąĄąĖąĘą▓ąĄčüč鹥ąĮ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Ruzik
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ č乥ą▓ 26, 2018 08:49:31 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 55
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1632
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĖčÄąĮ 09, 2011 17:17:47
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 5713
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
mial
ąØą░ čćąĖčüčéčŗą╣ ą║čĆąĖčüčéą░ą╗ą╗ ąĮąĄ ąĘą░ą╗čīąĄčłčī ąČąĄ č湥čĆąĄąĘ čüą░ą╝čā ą┐čĆąŠą│čā? ąÆčüąĄ čĆą░ą▓ąĮąŠ ą┤ą╗čÅ ą┐ąĄčĆą▓ąŠą│ąŠ čĆą░ąĘą░ ąĮčāąČąĄąĮ ąĖą╗ąĖ UART ąĖą╗ąĖ SWD?
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Uselock
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ č乥ą▓ 26, 2018 14:55:15 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé čÅąĮą▓ 16, 2009 23:27:49
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 64
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą¤čĆąŠčüč鹊ą╣ ą╝ąĄčģą░ąĮąĖąĘą╝ čĆą░čüč湥čéą░. ąÆčĆąĄą╝čÅ ąĮą░čģąŠąČą┤ąĄąĮąĖčÅ ą╗ą░ąĘąĄčĆą░ ąĮą░ą┤ "č鹊čćą║ąŠą╣" ąĘą░čüą▓ąĄčéą║ąĖ ą┐čĆąĖ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą║ą░čĆąĄčéą║ąĖ 1000 ą╝ą╝/čü ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖąĖ 720 č鹊č湥ą║/ą┤čÄą╣ą╝ čüąŠčüčéą░ą▓ą╗čÅąĄčé čćčāčéčī ą▒ąŠą╗ąĄąĄ 35 ą╝ą║čü. ąöą╗čÅ č鹊ą│ąŠ čćč鹊ą▒čŗ čĆą░čüčüąŠą│ą╗ą░čüąŠą▓ą░ąĮąĖąĄ ą┐čĆąĖ ą┐čĆčÅą╝ąŠą╝ ąĖ ąŠą▒čĆą░čéąĮąŠą╝ ą┐čĆąŠčģąŠą┤ąĄ ąĮąĄ ą┐čĆąĄą▓čŗčłą░ą╗ąŠ, čüą║ą░ąČąĄą╝, 10%, ąĘą░ą┤ąĄčƹȹ║ą░ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą╗ą░ąĘąĄčĆą░ ąĮąĄ ą┤ąŠą╗ąČąĮą░ ą┐čĆąĄą▓čŗčłą░čéčī 35/10/2 = 1,75 ą╝ą║čü. ą× ą║ą░ą║ąĖčģ 150 ą║ąōčå ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą╗ą░ąĘąĄčĆą░ ą╝ąŠąČąĄčé ąĖą┤čéąĖ čĆąĄčćčī? ąÉ ą©ąśą£ ą╗ą░ąĘąĄčĆą░ ąĮą░ ą║ą░ą║ąŠą╣ čćą░čüč鹊č鹥 čĆą░ą▒ąŠčéą░ąĄčé? ąØą░čłąĄą╗: ...C čāčćčæč鹊ą╝ č鹊ą│ąŠ, čćč鹊 ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čćą░čüč鹊čéą░ ą╝ąŠą┤čāą╗čÅčåąĖąĖ ą╗ą░ąĘąĄčĆą░ (čćą░čüč鹊čéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣) 48ą║ąōčå...
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Neutron
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ č乥ą▓ 26, 2018 18:46:38 |
|
| ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā! |
 |
ąÜą░čĆą╝ą░: 12
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 16
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą╝ą░ą╣ 28, 2011 13:36:28
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 36
ą×čéą║čāą┤ą░: ą│. ąĪą╗ą░ą▓ą│ąŠčĆąŠą┤
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 4
|
ąØą░ą║ąŠąĮąĄčå č鹊 ą┤ąŠčćąĖčéą░ą╗ ą┤ąŠ ą║ąŠąĮčåą░ ąØąĄą▒ąŠą╗čīčłą░čÅ ą┐ąŠą┤ą▒ąŠčĆą║ą░ čüąŠąŠą▒čēąĄąĮąĖą╣ ąĖąĘ ą┤ą░ąĮąĮąŠą│ąŠ č乊čĆčāą╝ą░. (ąĮąĄ ą▓ čģčĆąŠąĮąŠą╗ąŠą│ąĖč湥čüą║ąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ) ą¤ąŠčéąĖčģąŠąĮčīą║čā čüąŠą▒ąĖčĆą░čÄ ą╝ąĄčģą░ąĮąĖą║čā ąĖąĘ čéčāčłą║ąĖ ą┐čĆąĖąĮč鹥čĆą░ HP DeskJet 940c, 菹╗ąĄą║čéčĆąŠąĮąĖą║ą░ ąĖą┤ąĄčé čéąĖčģąŠąĮčīą║ąŠ ąĖąĘ ąÜąĖčéą░čÅ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
psychos
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: ą│čāą╗čÅčÄčé čüčéčĆąŠą║ąĖ ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ č乥ą▓ 28, 2018 02:02:20 |
|
| ąÆčŗą╝ąŠą│ą░č鹥ą╗čī ą┐čĆąĖą┐ąŠčÅ |
|
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 171
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čüąĄąĮ 23, 2008 19:36:10
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 538
ą×čéą║čāą┤ą░: ą£ą░ą│ąĮąĖč鹊ą│ąŠčĆčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
 0,1/0,1 ąōčāą╗čÅčÄčé čüčéčĆąŠą║ąĖ. ą¤ąŠąĮčÅčéąĮąŠ čćč鹊 ąŠčłąĖą▒ą║ą░ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ. (č鹊čćąĮąŠčüčéčī čüč鹊ą╗ą░ 161čé/1009ą╝ą║ą╝) ą▓čŗčģąŠą┤ ąóčāčé č鹊ą╗čīą║ąŠ čĆąĄą┤čāą║č鹊čĆ ? (čā ą╝ąĄąĮčÅ čĆąĄą╝ąĄąĮčī čüč鹊ą╗ čéčÅąĮąĄčé), ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī čĆąŠą╗ąĖą║ąŠą▓čŗą╣ čĆąĄą┤čāą║č鹊čĆ ? čĆąĄą╝ąĮąĖ čü čĆąŠą╗ąĖą║ąŠą╝ ąĮą░ 60 ąĘčāą▒ąŠą▓ ą▓ąĘčÅą╗ 0,1/0,1 ąÜąŠąĮąĄčćąĮąŠ ą┐čĆąĖ ą╝ąŠąĄą╣ ą║ąŠąĮčüčéčĆčāą║čåąĖąĖ ą┐ąŠą║ą░ ąĮąĄą┤ąŠčüčéąĖąČąĖą╝ąŠ, ąĮąŠ čüčéčĆąĄą╝ąĖčéčīčüčÅ ąĮą░ą┤ąŠ ąÜčüčéą░čéąĖ ą┤ąĖą░ą│ąŠąĮą░ą╗ąĖ 45* 0,1/0,1 ąŠč湥ąĮčī čģąŠčĆąŠčłąŠ ą┐ąŠą╗čāčćą░čÄčéčüčÅ. 0,15/0,15 ą┤ą░ą║ ą▓ąŠąŠą▒čēąĄ ą┤ą░ąČąĄ ą▓čŗą╝čŗą▓ą░ąĄčéčüčÅ čĆąĄąĘąĖčüčé ą╝ąĄąČą┤čā ą┤ąŠčĆąŠąČą║ą░ą╝ąĖ. čéčāčé čāąČąĄ čüčéčĆčāą╣ąĮčāčÄ ą┐čĆąŠčÅą▓ą║čā ąĮą░ą┤ąŠ, ą┐čĆąŠčüč鹊 ą┐ąŠą╗ąŠčüą║ą░ąĮąĖąĄą╝ ą▓ ą▓ą░ąĮąĮąŠčćą║ąĄ ą╝ąĄą╗ą║ąĖą╣ čĆąĖčüčāąĮąŠą║ čéčÅąČąĄą╗ąŠ ą┐ąŠą╗čāčćąĖčéčüčÅ...
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Forward
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ č乥ą▓ 28, 2018 11:08:34 |
|
| ą£čāčćąĖč鹥ą╗čī ą╝ąĖą║čĆąŠčüčģąĄą╝ |
ąÜą░čĆą╝ą░: 11
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 229
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčü ą░ą┐čĆ 20, 2014 14:18:07
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 445
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
psychos ą┐ąĖčüą░ą╗(ą░): ąōčāą╗čÅčÄčé čüčéčĆąŠą║ąĖ. ą¤ąŠąĮčÅčéąĮąŠ čćč鹊 ąŠčłąĖą▒ą║ą░ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ.  ąÆą░ąĮą│čāčÄ. ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ 720 (čģ1). ą×ą║čĆčāą│ą╗ąĄąĮąĖąĄ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ ą╝ą░č鹥ą╝ą░čéąĖč湥čüą║ąŠąĄ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ. ąĀąĄčłąĄąĮąĖąĄ - ąĮą░ą┐ąĄčćą░čéą░čéčī ą▓ čĆąĄąČąĖą╝ąĄ čāą▓ąĄą╗ąĖč湥ąĮąĖčÅ č鹊čćąĮąŠčüčéąĖ čģ2 psychos ą┐ąĖčüą░ą╗(ą░): ąóčāčé č鹊ą╗čīą║ąŠ čĆąĄą┤čāą║č鹊čĆ ? ąöą╗čÅ ąĮą░čćą░ą╗ą░ ą╝ąŠąČąĮąŠ ąĘą░ą╝ąĄąĮąĖčéčī čłą║ąĖą▓ ą┐čĆąĖą▓ąŠą┤ą░ čü 20-čéąĖ ąĘčāą▒ąŠą│ąŠ ąĮą░ 16 (ą┐ąŠą╗čāčćąĖą╝ 5 ą╝ą║ą╝ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čüč鹊ą╗ą░) ąĖą╗ąĖ 12 (3,75 ą╝ą║ą╝) ąØą×! ąøčāčćčłąĄ ą┐ąĄčćą░čéą░čéčī ą│ąĄčĆą▒ąĄčĆ čü čłą░ą│ąŠą╝ čüč鹊ą╗ą░, ą║čĆą░čéąĮąŠą╝ čĆą░ąĘčĆąĄčłąĄąĮąĖčÄ. ą×čłąĖą▒ą║ąĖ čĆąĄąĘą║ąŠ čāą╝ąĄąĮčīčłą░čéčüčÅ. To ALL ąŻą║ą░ąĘčŗą▓ą░ą╣č鹥, ą┐ąŠąČą░ą╗čāą╣čüčéą░, čĆą░ą▒ąŠčćąĖąĄ čĆąĄąČąĖą╝čŗ. ąøąĄą│č湥 čĆą░ąĘąŠą▒čĆą░čéčīčüčÅ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
psychos
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ č乥ą▓ 28, 2018 13:06:51 |
|
| ąÆčŗą╝ąŠą│ą░č鹥ą╗čī ą┐čĆąĖą┐ąŠčÅ |
|
ąÜą░čĆą╝ą░: 4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 171
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čüąĄąĮ 23, 2008 19:36:10
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 538
ą×čéą║čāą┤ą░: ą£ą░ą│ąĮąĖč鹊ą│ąŠčĆčüą║
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
psychos ą┐ąĖčüą░ą╗(ą░): ąōčāą╗čÅčÄčé čüčéčĆąŠą║ąĖ. ą¤ąŠąĮčÅčéąĮąŠ čćč鹊 ąŠčłąĖą▒ą║ą░ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ. ąÆą░ąĮą│čāčÄ. ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ 720 (čģ1). ą×ą║čĆčāą│ą╗ąĄąĮąĖąĄ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ ą╝ą░č鹥ą╝ą░čéąĖč湥čüą║ąŠąĄ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ. ąĀąĄčłąĄąĮąĖąĄ - ąĮą░ą┐ąĄčćą░čéą░čéčī ą▓ čĆąĄąČąĖą╝ąĄ čāą▓ąĄą╗ąĖč湥ąĮąĖčÅ č鹊čćąĮąŠčüčéąĖ čģ2 ąóąŠ ąĄčüčéčī ą┤ąĖčüą║čĆąĄčéąĮąŠčüčéčī ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ čüč鹊ą╗ą░ ą┤ąŠą╗ąČąĮąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░čéčī ą┤ąĖčüą║čĆąĄčéąĮąŠčüčéąĖ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ą░čĆąĄčéą║ąĖ, čÅ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą┐ąŠąĮčÅą╗ ? ąĖ ą║ą░čĆąĄčéą║ą░ čéčāčé ą│ą╗ą░ą▓ąĮąĄąĄ, ą▓ąĄčĆąĮąŠ ? psychos ą┐ąĖčüą░ą╗(ą░): ąóčāčé č鹊ą╗čīą║ąŠ čĆąĄą┤čāą║č鹊čĆ ? ąöą╗čÅ ąĮą░čćą░ą╗ą░ ą╝ąŠąČąĮąŠ ąĘą░ą╝ąĄąĮąĖčéčī čłą║ąĖą▓ ą┐čĆąĖą▓ąŠą┤ą░ čü 20-čéąĖ ąĘčāą▒ąŠą│ąŠ ąĮą░ 16 (ą┐ąŠą╗čāčćąĖą╝ 5 ą╝ą║ą╝ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čüč鹊ą╗ą░) ąĖą╗ąĖ 12 (3,75 ą╝ą║ą╝) ąØą░ ą©ąö 16 ąĘčāą▒ąŠą▓čŗą╣ ąĖ čüč鹊ąĖčé ąÜą░ą║ ą╝ą░č鹥ą╝ą░čéąĖč湥čüą║ąĖ čĆą░čüčüčćąĖčéą░čéčī č鹊čćąĮąŠčüčéčī čüč鹊ą╗ą░ ąĖčüčģąŠą┤čÅ ąĖąĘ čĆą░ąĘą╝ąĄčĆą░ čłą║ąĖą▓ą░ ? ą©ąö čā ą╝ąĄąĮčÅ 0,9*/čłą░ą│, ą┤čĆą░ą╣ą▓ąĄčĆ TMC2100, čāą╝ąĄąĄčé ą┤ąĄą╗ąĖčéčī čłą░ą│ ąĮą░ 16 čćą░čüč鹥ą╣, ą┐ąŠą╗čāčćą░ąĄą╝ 1 ąŠą▒ąŠčĆąŠčé: 360/0,9*16 = 6400 čłą░ą│ąŠą▓ ąĮą░ ąŠą▒ąŠčĆąŠčé, ąÆąĄčĆąĮąŠ ? ą░ ą║ą░ą║ ą▒čĆą░čéčī ą┤ą╗ąĖąĮčā ą×ą║čĆčāąČąĮąŠčüčéąĖ čĆąĄą╝ąĮčÅ, ą┐ąŠ ą▓ąĮąĄčłąĮąĄą╣ ąĄą│ąŠ čćą░čüčéąĖ(č鹊ąĄčüčéčī čĆąĄą╝ąĄąĮčī ąŠą│ąĖą▒ą░ąĄčé čłą║ąĖą▓ ąĖ ąĘą░ą╝ąĄčĆčÅčéčī ą┤ąĖą░ą╝ąĄčéčĆ ą┐čĆčÅą╝ ą┐ąŠ čĆąĄą╝ąĮčÄ ąŠą│ąĖą▒ą░čÄčēąĄą╝čā čłą║ąĖą▓ ąĖ ą▓čŗčćąĖčüą╗čÅčéčī ą┤ą╗ąĖąĮčā ąŠą║čĆčāąČąĮąŠčüčéąĖ) ? ąĖčüčģąŠą┤čÅ ąĖąĘ čŹč鹊ą│ąŠ ą▓čŗčćąĖčüą╗ąĖą╝ ą┐ąŠą╗ąĮąŠą╝čā ąŠą▒ąŠčĆąŠčéčā čüą║ąŠą╗čīą║ąŠ ą╝ą╝ ą┤ą▓ąĖąČąĄąĮąĖčÅ čüč鹊ą╗ą░, ą▓ąĄčĆąĮąŠ ? ąØą×! ąøčāčćčłąĄ ą┐ąĄčćą░čéą░čéčī ą│ąĄčĆą▒ąĄčĆ čü čłą░ą│ąŠą╝ čüč鹊ą╗ą░, ą║čĆą░čéąĮąŠą╝ čĆą░ąĘčĆąĄčłąĄąĮąĖčÄ. ą×čłąĖą▒ą║ąĖ čĆąĄąĘą║ąŠ čāą╝ąĄąĮčīčłą░čéčüčÅ. ą┐ąŠčģąŠąČąĄ ą┐ąŠą┤čéą▓ąĄčĆą┤ąĖą╗ąĖ ą╝čŗčüą╗čī ą▓čŗčłąĄ To ALL ąŻą║ą░ąĘčŗą▓ą░ą╣č鹥, ą┐ąŠąČą░ą╗čāą╣čüčéą░, čĆą░ą▒ąŠčćąĖąĄ čĆąĄąČąĖą╝čŗ. ąøąĄą│č湥 čĆą░ąĘąŠą▒čĆą░čéčīčüčÅ. ą║ą░ą║ąĖąĄ ąĖą╝ąĄąĮąĮąŠ čĆąĄąČąĖą╝čŗ čéčĆąĄą▒čāčÄčéčüčÅ ? čÅ ą▒čāą┤čā ąĖčģ ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░čéčī ą║ ą║ą░ąČą┤ąŠą╝čā ą▓ąŠą┐čĆąŠčüčā... ą┐.čü. ą¤čĆąŠčłčā ą┐čĆąŠčüčéąĖčéčī ąĘą░ ą│ą╗čāą┐čŗąĄ ą▓ąŠą┐čĆąŠčüčŗ, č鹊ą╗čīą║ąŠ čāčćąĖą╝čüčÅ 
ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ čĆą░ąĘ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī psychos ąĪčĆ č乥ą▓ 28, 2018 13:10:44, ą▓čüąĄą│ąŠ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī 1 čĆą░ąĘ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
SDimok
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ č乥ą▓ 28, 2018 13:07:47 |
|
| ą£čāčćąĖč鹥ą╗čī ą╝ąĖą║čĆąŠčüčģąĄą╝ |
 |
ąÜą░čĆą╝ą░: 21
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1015
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ č乥ą▓ 06, 2016 14:34:29
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 480
ą×čéą║čāą┤ą░: ąĪą░čÅąĮčüą║, ąśčĆą║čāčéčüą║ą░čÅ ąŠą▒ą╗ą░čüčéčī
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 14
|
ąÆą░ąĮą│čāčÄ. ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ 720 (čģ1). ą×ą║čĆčāą│ą╗ąĄąĮąĖąĄ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ ą╝ą░č鹥ą╝ą░čéąĖč湥čüą║ąŠąĄ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ. ąĀąĄčłąĄąĮąĖąĄ - ąĮą░ą┐ąĄčćą░čéą░čéčī ą▓ čĆąĄąČąĖą╝ąĄ čāą▓ąĄą╗ąĖč湥ąĮąĖčÅ č鹊čćąĮąŠčüčéąĖ čģ2 ą£ąŠąČąĮąŠ ą▓ ą╝ąŠąĄą╣ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī, ą▓ ąĮąĄą╣ ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮčŗą╣ čģąŠą┤. ąÆąŠčé ą║ąŠą╝čā ąĖąĮč鹥čĆąĄčüąĮąŠ ą╝ąŠąČąĄč鹥 ą┐ąŠą│ąŠąĮčÅčéčī. ąöąŠą▒ą░ą▓ąĖą╗ čüą╝ąĄčēąĄąĮąĖčÅ. ą£ąŠąČąĮąŠ čüą▓ąĄčéąĖčéčī ą┐ąŠ čĆąĄą┐ąĄčĆą░ą╝. ą¤čĆąĖą▓čÅąĘą║ą░ ą║ čĆąĄą┐ąĄčĆą░ą╝ ą║ą░ą║ ą▓ ą░ą▓č鹊čĆčüą║ąŠą╣ ą▓ąĄčĆčüąĖąĖ F2 ą║ ą╗ąĄą▓ąŠą╝čā F3 ą║ ą┐čĆą░ą▓ąŠą╝čā. Home, End, PgDown,PgUp ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┐ąŠ čĆąĄą┐ąĄčĆą░ą╝. ą¤ąŠą▓ąŠčĆąŠčé ą┐ąŠ ą┤ą▓čāą╝ č鹊čćą║ą░ą╝ ą┐ąŠą║ą░ čāą▒čĆą░ą╗ - ąĮąĄ ą┤ą░ąĄčéčüčÅ ą║ą░ą╝ąĄąĮąĮčŗą╣ čåą▓ąĄč鹊ą║  Ruzik, ą┐čĆąŠą▓ąĄčĆčī čā čüąĄą▒čÅ ą┤ą▓ąĖąČąĄąĮąĖąĄ čü ą║ąĮąŠą┐ąŠą║ (ą▓čĆąŠą┤ąĄ ą║ąŠčüčÅą║ąĖ čāą▒čĆą░ą╗)
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
vsteshak
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ąøą░ąĘąĄčĆąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ą╗čÅ ąĘą░čüą▓ąĄčéą║ąĖ č乊č鹊čĆąĄąĘąĖčüčéą░ ąŠčé AlphaCrow ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ č乥ą▓ 28, 2018 13:22:21 |
|
| ą×ą┐čŗčéąĮčŗą╣ ą║ąŠčé |
 |
ąÜą░čĆą╝ą░: 3
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 153
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ą┤ąĄą║ 27, 2012 13:38:18
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 726
ą×čéą║čāą┤ą░: ąæąĄčĆą┤ąĖč湥ą▓, ąŻą║čĆą░ąĖąĮą░
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ą”ąĖčéą░čéą░: ą░ ą║ą░ą║ ą▒čĆą░čéčī ą┤ą╗ąĖąĮčā ą×ą║čĆčāąČąĮąŠčüčéąĖ čĆąĄą╝ąĮčÅ ąĀąĄą╝ąĄąĮčī čā ą▓ą░čü, ąĮą░ą▓ąĄčĆąĮąŠąĄ, čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ gt2. ąŻ ąĮąĄą│ąŠ čłą░ą│ 2ą╝ą╝. ąŻą╝ąĮąŠąČą░ąĄč鹥 ąĮą░ 16 ąĘčāą▒ąŠą▓, ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą┤ą╗ąĖąĮą░ ąŠą║čĆčāąČąĮąŠčüčéąĖ 32ą╝ą╝. 32/6400=0,005ą╝ą╝ ąÉ ąĄčüą╗ąĖ ąĮąĄčüčéą░ąĮą┤ą░čĆčéąĮčŗą╣, ą┐ąŠą┐čĆąŠą▒čāą╣č鹥 ąĖąĘą╝ąĄčĆąĖčéčī ąĄą│ąŠ čłą░ą│...
_________________
ąōąĖąĮčāčéčī ąĮą░čłč¢ ą▓ąŠčĆąŠąČąĄąĮčīą║ąĖ.

|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
|
ąĪčéčĆą░ąĮąĖčåą░ 289 ąĖąĘ 476
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 9506 ] |
... , , , , , , ... |
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ |
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: ąĮąĄčé ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ ąĖ ą│ąŠčüčéąĖ: 20 |
|
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ
|

|
|