|
ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - ążąŻą×ąŚ ąĮą░ ą▒ą░ąĘąĄ AC-CDI
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
 
|
ąĪčéčĆą░ąĮąĖčåą░ 67 ąĖąĘ 115
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2297 ] |
... , , , , , , ... |
| ąÉą▓č鹊čĆ |
ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
Flash.#13

|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŻą×ąŚ ąĮą░ ą▒ą░ąĘąĄ AC-CDI  ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ąĮąŠčÅ 17, 2019 17:58:59 |
|
| ąöąĄčƹȹĖčé ą┐ą░čÅą╗čīąĮąĖą║ čģą▓ąŠčüč鹊ą╝ |
 |
ąÜą░čĆą╝ą░: 20
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 153
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą░ą┐čĆ 12, 2014 23:46:03
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 965
ą×čéą║čāą┤ą░: ąÜąĖąĄą▓
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 2
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
 |
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
SpulN
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŻą×ąŚ ąĮą░ ą▒ą░ąĘąĄ AC-CDI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ąĮąŠčÅ 17, 2019 18:48:04 |
|
| ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā! |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ąĮąŠčÅ 13, 2019 22:33:42
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 20
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąØą░ čüč湥čé ą┐čĆąŠą│čĆą░ą╝, ą║čĆąŠą╝ąĄ ą▓ąŠčĆą┤ą░ ąĮąĖč湥ą│ąŠ ą▓ ą│ąŠą╗ąŠą▓čā ąĮąĄ ą┐čĆąĖčģąŠą┤ąĖčé, ąĮąŠ čéą░ą╝ č湥čĆčéąĖčéčī, č鹊 ąĄčēąĄ čāą┤ąŠą▓ąŠą╗čīčüčéą▓ąĖąĄ)) ąÉ ąĮąĄ ą┐čĆąŠčēąĄ ą▓ą╝ąĄčüč鹊 ą┤ą▓čāčģ ąŠą┐č鹊ą┐ą░čĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī pc814? ąÆąŠčé ąĮą░čłąĄą╗ ą▓ ą┐ąŠąĖčüą║ąĄ https://proglib.io/p/6-diagram-services/
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
Ivanoff-iv

|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŻą×ąŚ ąĮą░ ą▒ą░ąĘąĄ AC-CDI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ąĮąŠčÅ 18, 2019 07:02:03 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2030
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ąĮąŠčÅ 11, 2016 05:48:09
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6619
ą×čéą║čāą┤ą░: ąĪąĄčĆą┤čåąĄ ą¤ą░čĆą╝čŗ
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
")
|
ąØą░ čüč湥čé ą┐čĆąŠą│čĆą░ą╝ą╝: ąĪą┐ąŠą╣ą╗ąĄčĆ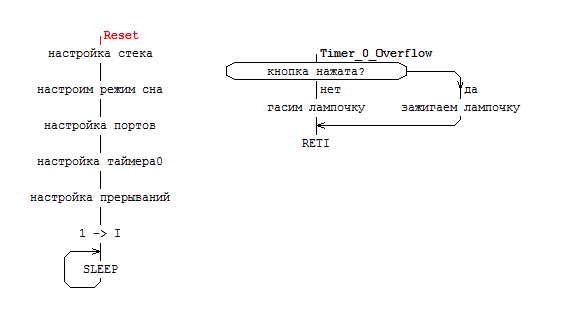
(ąØąĄčüčéą░ąĮą┤ą░čĆčéąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▓čüčæ č鹊ą│ąŠ-ąČąĄ ąÉąæ...)ąĮąŠ ą┐ąŠčüą╗ąĄ ąŠčåąĄąĮą║ąĖ alexhrą░ (čģąŠčéčī ą▒čŗ ąĮą░ą┐ąĖčüą░ą╗, ąĘą░ čćč鹊...) ąČąĄą╗ą░ąĮąĖčÅ čĆą░čüą┐ąĖčüčŗą▓ą░čéčī ą░ą╗ą│ąŠčĆąĖčéą╝ ą┐ąŠčāą▒ą░ą▓ąĖą╗ąŠčüčī... čé.čć. ą┤ą░ą╗čīčłąĄ čüą░ą╝ąĖ...
_________________
ą¤čĆąŠčüč鹊 ąĮąĄ čāčćąĖ čäąĖąĘąĖą║čā ą▓ čłą║ąŠą╗ąĄ, ąĖ ą▓čüčÅ čéą▓ąŠčÅ ąČąĖąĘąĮčī ą▒čāą┤ąĄčé ąĮą░ą┐ąŠą╗ąĮąĄąĮą░ čćčāą┤ąĄčüą░ą╝ąĖ ąĖ ą▓ąŠą╗čłąĄą▒čüčéą▓ąŠą╝ 
ąæąĄąĘą│čĆą░ą╝ąŠčéąĮąŠ ą▓ąŠą┐čĆąŠčłą░čÄčēąĖą╝ ą┐čĆąŠ čüąĖą╗ąŠą▓čāčÄ ąĖą╗ąĖ ą▓čŗčüąŠą║ąŠą▓ąŠą╗čīčéąĮčāčÄ čŹą╗ąĄą║čéčĆąŠąĮąĖą║čā čÅ ąĮąĄ ąŠčéą▓ąĄčćą░čÄ, ą░ č鹊 ąĄčēčæ ą┐ąŠčüą░ą┤čÅčé ąĘą░ čāčćą░čüčéąĖąĄ ą▓ (čüą░ą╝ąŠ)čāą▒ąĖąĄąĮąĖąĖ ąŠą▒ąŠą╗čéčāčüą░...
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Arwood
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŻą×ąŚ ąĮą░ ą▒ą░ąĘąĄ AC-CDI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ąĮąŠčÅ 18, 2019 09:16:59 |
|
| ąöąĄčƹȹĖčé ą┐ą░čÅą╗čīąĮąĖą║ čģą▓ąŠčüč鹊ą╝ |
 |
ąÜą░čĆą╝ą░: 1
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 62
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé čÅąĮą▓ 13, 2011 13:51:26
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 986
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
Ivanoff-iv ą┐ąĖčüą░ą╗(ą░): ąĮąŠ ą┐ąŠčüą╗ąĄ ąŠčåąĄąĮą║ąĖ alexhrą░ (čģąŠčéčī ą▒čŗ ąĮą░ą┐ąĖčüą░ą╗, ąĘą░ čćč鹊...) ąČąĄą╗ą░ąĮąĖčÅ čĆą░čüą┐ąĖčüčŗą▓ą░čéčī ą░ą╗ą│ąŠčĆąĖčéą╝ ą┐ąŠčāą▒ą░ą▓ąĖą╗ąŠčüčī...
čé.čć. ą┤ą░ą╗čīčłąĄ čüą░ą╝ąĖ... ą×, ą║ą░ą║ ąČąĄ čŹč鹊 ąĘąĮą░ą║ąŠą╝ąŠ ąĖ ą┐čĆąĄą┤čüą║ą░ąĘčāąĄą╝ąŠ. ą¤ąŠą┤ąŠą▒ąĮčŗą╝ąĖ ą│čāčĆčÅą╝ąĖ, ąĖąĮč鹥čĆąĮąĄčé ą║ą░ą║ ą┐ąŠą╝ąŠą╣ą║ą░ ąĘą░ą▓ą░ą╗ąĄąĮ. ąĀą░čüčüą║ą░ąĘčŗą▓ą░čÄčé ą║ą░ą║ ą▒čŗčüčéčĆąŠ ąĖ ą╗ąĄą│ą║ąŠ "ąŠą▒čāčćą░čé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÄ". ą×čüąŠą▒čŗąĄ ą┤ąŠą╗ą│ąŠąČąĖč鹥ą╗ąĖ ą┤ą░ąČąĄ čüą┐ąŠą┤ą░ą▒ą╗ąĖą▓ą░čÄčéčüčÅ ąĮą░ ą┐ąĄčĆą▓čŗą╣-ą▓č鹊čĆąŠą╣ čāčĆąŠą║. ąØąŠ ą▓čüčæ ąĘą░ą║ą░ąĮčćąĖą▓ą░ąĄčéčüčÅ ąĮą░ "ą┐ąŠą╝ąĖą│ą░čéčī čüą▓ąĄč鹊ą┤ąĖąŠą┤ąĖą║ą░ą╝ąĖ" ąĖą╗ąĖ ąĮą░ą┐ąĖčüą░čéčī ą¤čĆąĖą▓ąĄčé ą£ąĖčĆ. ąæąŠą╗čīčłąĄą│ąŠ ąĖčģ čāą╝ąĖčłą║ąŠ ą▓čŗą┤čāą╝ą░čéčī ąĮąĄ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąĖ ąŠąĮąĖ čüą╗ąĖą▓ą░čÄčéčüčÅ. ąĪ ą┐ąŠą▓ąŠą┤ąŠą╝ ąĖą╗ąĖ ą▒ąĄąĘ. ąÉ č鹥, ą┐ąŠą▓čæą╗čüčÅ ąĮą░ ąĖčģ čĆą░ąĘą▓ąŠą┤, ąŠčüčéą░čÄčéčüčÅ čü ą┐ąŠąĮąĖą╝ą░ąĮąĖąĄą╝ čćč鹊 ą┐ąŠčéčĆą░čéąĖą╗ąĖ čüą▓ąŠčæ ą▓čĆąĄą╝čÅ ąĮą░ čćčīčÄ-č鹊 ą┤ąĄčéčüą║čāčÄ ą┐čüąĖčģąŠčéčĆą░ą▓ą╝čā ąĖ ąŠą▒čāčćąĖą╗ąĖčüčī ąĮąĖą║ąŠą╝čā ąĮąĄ ąĮčāąČąĮąŠą╝čā čāą╝ąĄąĮąĖčÄ ą╝ąĖą│ą░čéčī čüą▓ąĄč鹊ą┤ąĖąŠą┤ąĖą║ą░ą╝ąĖ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąÆčŗą▒ąĖčĆą░ąĄą╝ čüčģąĄą╝čā BMS ą┤ą╗čÅ ąĘą░čĆčÅą┤ą░ ą╗ąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗčģ (LiFePO4) ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓
ą×ą▒čÅąĘą░č鹥ą╗čīąĮčŗą╝ čāčüą╗ąŠą▓ąĖąĄą╝ ą┤ąŠą╗ą│ąŠą╣ ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ Li-FePO4-ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ EVE Energy, čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ BMS-ą╝ąĖą║čĆąŠčüčģąĄą╝. ąøąĖčéąĖą╣-ąČąĄą╗ąĄąĘąŠč乊čüčäą░čéąĮčŗąĄ ąÉąÜąæ ąŠčéą╗ąĖčćą░čÄčéčüčÅ čéą░ą║ąĖą╝ąĖ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ, ą║ą░ą║ ą▓čŗčüąŠą║ą░čÅ ą╝ąĮąŠą│ąŠą║čĆą░čéąĮąŠčüčéčī čåąĖą║ą╗ąŠą▓ ąĘą░čĆčÅą┤ą░-čĆą░ąĘčĆčÅą┤ą░, ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▒čŗčüčéčĆąŠą╣ ąĘą░čĆčÅą┤ą║ąĖ, čāčüč鹊ą╣čćąĖą▓ąŠčüčéčī ą║ ą▒čāč乥čĆąĮąŠą╝čā čĆąĄąČąĖą╝čā čĆą░ą▒ąŠčéčŗ ąĖ ą┐čĆąĖąĄą╝ą╗ąĄą╝ą░čÅ čüč鹊ąĖą╝ąŠčüčéčī. ąØąŠ ą┤ą╗čÅ čŹčéąĖčģ ąÉąÜąæ ąŠč湥ąĮčī ą▓ą░ąČąĄąĮ ą║ąŠąĮčéčĆąŠą╗čī ą┐čĆąŠčåąĄčüčüą░ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░ ą┤ą╗čÅ ąĖąĘą▒ąĄą│ą░ąĮąĖčÅ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĘą░čĆčÅą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ 100% ąĘą░čĆčÅą┤ą░. ąśąĮąČąĄąĮąĄčĆčŗ ąÜą×ą£ą¤ąŁąø ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖą╗ąĖ čüą┐ąĖčüąŠą║ čéą░ą║ąĖčģ čĆąĄčłąĄąĮąĖą╣ ąŠčé čĆą░ąĘąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
Ivanoff-iv
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŻą×ąŚ ąĮą░ ą▒ą░ąĘąĄ AC-CDI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ąĮąŠčÅ 18, 2019 09:42:02 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2030
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ąĮąŠčÅ 11, 2016 05:48:09
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6619
ą×čéą║čāą┤ą░: ąĪąĄčĆą┤čåąĄ ą¤ą░čĆą╝čŗ
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
|
ąĢčüą╗ąĖ čŹč鹊 ą┐čĆąŠ ą╝ąĄąĮčÅ, č鹊 - ąĮąĄ čüąŠą│ą╗ą░čüąĄąĮ, ąĘą┤ąĄčüčī čÅ ąĮąĖ ą║ąŠą╝čā ąĮąĄ ąŠą▒ąĄčēą░ą╗ ąŠą▒čāč湥ąĮąĖčÅ (ą┤ą░ ąĖ ą▓ąŠąŠą▒čēąĄ ąĮąĖč湥ą│ąŠ ąĮąĄ ąŠą▒ąĄčēą░ą╗)...
ą┐čĆąĖą▓ąĄą╗ ą╗ąĖčłčī ą┐čĆąĖą╝ąĄčĆ, ą║ą░ą║ ą╝ąŠąČąĮąŠ čāą┤ąŠą▒ąĮąĄą╣ č湥ą╝ ą▓ ą▓ąŠčĆą┤ąĄ čĆą░čüą┐ąĖčüą░čéčī ą░ą╗ą│ąŠčĆąĖčéą╝ (ą║ą░ą║ čüą░ą╝ ąĖąĮąŠą│ą┤ą░ ą┤ąĄą╗ą░čÄ)...
ą░ ą▓ ą┐čĆąĄą┤čŗą┤čāčēąĄą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ ą┐ąŠą┐čŗčéą░ą╗čüčÅ ą┐ąŠą║ą░ąĘą░čéčī ą╝ąŠčüčéąĖą║ ą┐ąŠąĮąĖą╝ą░ąĮąĖčÅ ą╝ąĄąČą┤čā ąĪčłąĮąĖą║ą░ą╝ąĖ ąĖ ąÉąĪąĪąĢąæąøąĢąĀčēąĖą║ą░ą╝ąĖ...
čé.ą║. čüą░ą╝ ąĮą░čćą░ą╗ ą┐ąŠąĮąĖą╝ą░čéčī ą░čüčüąĄą╝ą▒ą╗ąĄčĆ ąĖą╝ąĄąĮąĮąŠ čü čŹč鹊ą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ (ą┤ąŠąŠčüą▓ąŠąĖčéčī čüąĖčüč鹥ą╝čā ą║ąŠą╝ą░ąĮą┤ ąŠą║ą░ąĘą░ą╗ąŠčüčī ą┐čĆąŠčēąĄ, ą║ąŠą│ą┤ą░ čāąČąĄ ą▒čŗą╗ąŠ ą┐ąŠąĮčÅčéąĮąŠ ą┐čĆąŠ čĆąĄą│ąĖčüčéčĆčŗ ąĖ ą┐čĆąŠčćčāčÄ ą▓ąĮčāčéčĆąĄąĮąĮąŠčüčéčī ą╝ą║, č湥ą╝ ą┐čŗčéą░čéčīčüčÅ ą┐ąŠąĮčÅčéčī čüčĆą░ąĘčā ą▓čüčæ).
_________________
ą¤čĆąŠčüč鹊 ąĮąĄ čāčćąĖ čäąĖąĘąĖą║čā ą▓ čłą║ąŠą╗ąĄ, ąĖ ą▓čüčÅ čéą▓ąŠčÅ ąČąĖąĘąĮčī ą▒čāą┤ąĄčé ąĮą░ą┐ąŠą╗ąĮąĄąĮą░ čćčāą┤ąĄčüą░ą╝ąĖ ąĖ ą▓ąŠą╗čłąĄą▒čüčéą▓ąŠą╝
ąæąĄąĘą│čĆą░ą╝ąŠčéąĮąŠ ą▓ąŠą┐čĆąŠčłą░čÄčēąĖą╝ ą┐čĆąŠ čüąĖą╗ąŠą▓čāčÄ ąĖą╗ąĖ ą▓čŗčüąŠą║ąŠą▓ąŠą╗čīčéąĮčāčÄ čŹą╗ąĄą║čéčĆąŠąĮąĖą║čā čÅ ąĮąĄ ąŠčéą▓ąĄčćą░čÄ, ą░ č鹊 ąĄčēčæ ą┐ąŠčüą░ą┤čÅčé ąĘą░ čāčćą░čüčéąĖąĄ ą▓ (čüą░ą╝ąŠ)čāą▒ąĖąĄąĮąĖąĖ ąŠą▒ąŠą╗čéčāčüą░...
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
Arwood
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŻą×ąŚ ąĮą░ ą▒ą░ąĘąĄ AC-CDI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ąĮąŠčÅ 18, 2019 10:57:15 |
|
| ąöąĄčƹȹĖčé ą┐ą░čÅą╗čīąĮąĖą║ čģą▓ąŠčüč鹊ą╝ |
|
ąÜą░čĆą╝ą░: 1
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 62
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé čÅąĮą▓ 13, 2011 13:51:26
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 986
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ąæą╗ąŠą║ čüčģąĄą╝ą░ ąĮąĄ ą┐čĆąŠą▒ą╗ąĄą╝ą░, č鹊ą╗čīą║ąŠ ą│ą┤ąĄ ąĄąĄ čĆąĖčüąŠą▓ą░čéčī? ąōą┤ąĄ čāą│ąŠą┤ąĮąŠ. ąÆ č鹊ą╝, čćč鹊 ąĄčüčéčī ą┐ąŠą┤ čĆčāą║ąŠą╣. ąø菹╣ ąÆą╗ąŠąČąĄąĮąĖąĄ:
 ąø菹╣ąÉčāčé.JPG [14.76 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 355
ąø菹╣ąÉčāčé.JPG [14.76 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 355
ąĪą┐ą╗ą░ąĮ ąÆą╗ąŠąČąĄąĮąĖąĄ:
ąĪą┐ą╗ą░ąĮ.JPG [46.29 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 329
ąÜąŠčĆąĄą╗ ąÆą╗ąŠąČąĄąĮąĖąĄ:
ąæąĄąĘčŗą╝čÅąĮąĮčŗą╣-1.jpg [34.92 KiB]
ąĪą║ą░čćąĖą▓ą░ąĮąĖą╣: 341
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Ivanoff-iv
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŻą×ąŚ ąĮą░ ą▒ą░ąĘąĄ AC-CDI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ąĮąŠčÅ 18, 2019 11:57:36 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 2030
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ąĮąŠčÅ 11, 2016 05:48:09
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 6619
ą×čéą║čāą┤ą░: ąĪąĄčĆą┤čåąĄ ą¤ą░čĆą╝čŗ
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
ą░ ąĄčüą╗ąĖ ą┐čĆą░ą▓ąĖčéčī/ą┤ą▓ąĖą│ą░čéčī? ą▓čüčæ ąĘą░ąĮąŠą▓ąŠ čĆąĖčüąŠą▓ą░čéčī? (ąĮčā ąĖą╗ąĖ čćą░čüčéčī) ą▓ ąÉąæ čüčéčĆąĄą╗ą║ąĖ čüą░ą╝ąĖ čéčÅąĮčāčéčüčÅ ąĘą░ ą▒ą╗ąŠą║ąŠą╝, ą▒ą╗ąŠą║ ą┐čĆąĖ ą┐ąĄčĆąĄčéą░čüą║ąĖą▓ą░ąĮąĖąĖ ą┤ą▓ąĖą│ą░ąĄčéčüčÅ ą▓ąĄčüčī čåąĄą╗ąĖą║ąŠą╝... ą┤ąŠą▓ąŠą╗čīąĮąŠ čāą┤ąŠą▒ąĮąŠ, ąČą░ą╗čī č鹊ą╗čīą║ąŠ čĆą░ą╝ąŠą║ ą▓ąŠą║čĆčāą│ ą║ąŠą┤ą░ ąĮąĄčé... ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 6 minutes 43 seconds:ą┐ąŠą╣ą┤čā čÅ ą┐ąŠąČą░ą╗čāą╣ ąŠčéčüčÄą┤ą░, ą┐ąŠą║ą░ ąŠą┐čÅčéčī ą╝ąĖąĮčāčüąŠą▓ ąĮąĄ ąĮą░ą▓ąĄčłą░ą╗ąĖ... 
_________________
ą¤čĆąŠčüč鹊 ąĮąĄ čāčćąĖ čäąĖąĘąĖą║čā ą▓ čłą║ąŠą╗ąĄ, ąĖ ą▓čüčÅ čéą▓ąŠčÅ ąČąĖąĘąĮčī ą▒čāą┤ąĄčé ąĮą░ą┐ąŠą╗ąĮąĄąĮą░ čćčāą┤ąĄčüą░ą╝ąĖ ąĖ ą▓ąŠą╗čłąĄą▒čüčéą▓ąŠą╝
ąæąĄąĘą│čĆą░ą╝ąŠčéąĮąŠ ą▓ąŠą┐čĆąŠčłą░čÄčēąĖą╝ ą┐čĆąŠ čüąĖą╗ąŠą▓čāčÄ ąĖą╗ąĖ ą▓čŗčüąŠą║ąŠą▓ąŠą╗čīčéąĮčāčÄ čŹą╗ąĄą║čéčĆąŠąĮąĖą║čā čÅ ąĮąĄ ąŠčéą▓ąĄčćą░čÄ, ą░ č鹊 ąĄčēčæ ą┐ąŠčüą░ą┤čÅčé ąĘą░ čāčćą░čüčéąĖąĄ ą▓ (čüą░ą╝ąŠ)čāą▒ąĖąĄąĮąĖąĖ ąŠą▒ąŠą╗čéčāčüą░...
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
asel
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŻą×ąŚ ąĮą░ ą▒ą░ąĘąĄ AC-CDI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ąĮąŠčÅ 18, 2019 14:51:48 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čÅąĮą▓ 06, 2015 11:00:44
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 750
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
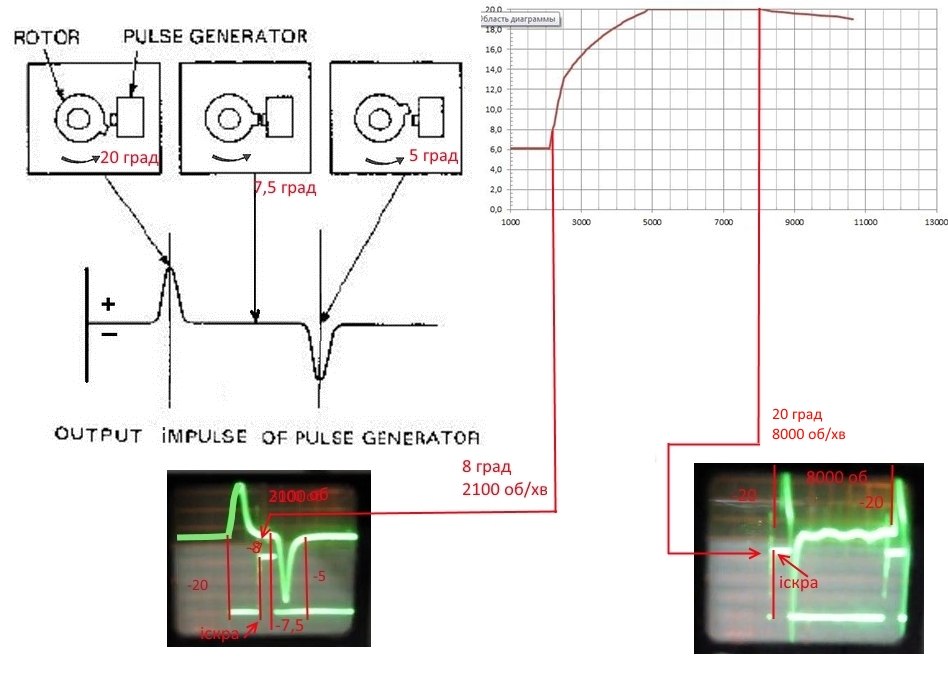
ąĀą░ąĘą▒ąĖčĆą░ąĄą╝čüčÅ čü v.2.1 (čü ą┐ąĄčĆąĄčģąŠą┤ą░ą╝ąĖ)  ąĢčüčéčī ąĖą┤ąĄąĖ... ąØąŠ ą│ąŠą╗ąŠą▓ą░ čāąČąĄ....  ;===ą▓č鹊čĆąŠą╣ čüąĖą│ąĮą░ą╗ ą┤ą░čéčćąĖą║ą░=== datchik2: ........... ąŚą░č湥ą╝ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī FF ą▓ R11R12 ąĖ ą┐ąŠč鹊ą╝ čāą╝ąĮąŠąČą░čéčī ąĮą░ 1023/ą┤ą╗ąĖąĮą░ ą╝ąĄčéą║ąĖ? ąśą╗ąĖ ąĄčēąĄ. R11R12 čāą╝ąĮąŠąČą░ąĄą╝ ąĮą░ 1023/ą┤ą╗ąĖąĮą░ ą╝ąĄčéą║ąĖ. ą¤ąŠą╗čāčćą░ąĄą╝ R13R14. ąó.ąĄ. čćąĖčüą╗ąŠ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ 360ą│čĆą░ą┤ (ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ ąĖąĘ čéą░ą▒ą╗ąĖčåčŗ R25). ąÉ ą┐ąŠč鹊ą╝ (R25-R23) ąĖ ą▓čŗčćąĖčüą╗čÅąĄą╝ ąĘą░ą┤ąĄčƹȹ║čā ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ R13R14 ąĖ ą┐čĆąĖą▒ą░ą▓ą╗čÅąĄą╝ ą║ R11R12. ą¤ąŠč湥ą╝čā ąĮąĄ čéą░ą║ ... (R25-R23) ąĖ ą▓čŗčćąĖčüą╗čÅąĄą╝ ąĘą░ą┤ąĄčƹȹ║čā ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ R11R12 ąĖ ą┐čĆąĖą▒ą░ą▓ą╗čÅąĄą╝ ą║ R11R12?? ąØąĄ čüąĖą╗ąĄąĮ ą▓ ą╝ą░č鹥ą╝ą░čéąĖą║ąĄ ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ.  ą£ąŠąČąĄčé ążą╗čŹčł čģąŠčéčī "ąĮą░ ą┐ą░ą╗čīčåą░čģ" ą┐ąŠčÅčüąĮąĖčé ą▓čüąĄ čŹčéąĖ čāą╝ąĮąŠąČąĄąĮąĖčÅ ąĖ ą┐ąŠč湥ą╝čā čéą░ą║. ąóąŠčćąĮąŠčüčéčī čāą│ą╗ą░? ą¤ąĪ. ąØą░ čüč鹥ąĮą┤ ąĄčēąĄ ąĮąĄ ąĘą░ą│čĆčāąČą░ą╗ čü ąŠčüčåąĖą╗ą╗ąŠą│čĆą░č乊ą╝. ąóą░ą╝ ą▓čüąĄ ą▒čāą┤ąĄčé ą▓ąĖą┤ąĮąŠ. ąĢčēąĄ. ąŚą░č湥ą╝ ą▓ "holostie" ąĘą░ą┐ąĖčüčŗą▓ą░čéčī ą▓ R9R10 FFFF, ąĄčüą╗ąĖ ą┐ąŠč鹊ą╝ ą▓ "datchik2" ą┐ąŠč鹊ą╝ ąŠą┐čÅčéčī ą┐ąĖčłąĄą╝ č鹊ąČąĄ. ąöą▓ą░ čĆą░ąĘą░!!  ąæčāą┤čā ąĄčēąĄ čĆą░ąĘą▒ąĖčĆą░čéčīčüčÅ čü "čģąŠą╗ąŠčüčéąĖąĄ". ąŻąČąĄ ą┐ąĖčüą░ą╗, čćč鹊 ąĄčüą╗ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čÅ FF, čāą│ąŠą╗ ą┐čĆąĖ 480ąŠą▒ čāčģąŠą┤ąĖčé ąŠč湥ąĮčī ą┤ą░ą╗ąĄą║ąŠ. ąØąŠ ą┐čĆąĖ ąĄčēąĄ čāą╝ąĄąĮčīčłąĄąĮąĖąĖ ąŠą▒ąŠčĆąŠč鹊ą▓, čāą│ąŠą╗ ąĮą░čćąĖąĮą░ąĄčé čüą┤ą▓ąĖą│ą░čéčīčüčÅ ąĮą░ąĘą░ą┤. (ą┐ąŠą║ą░ ąĮąĄ ą┐ąŠą╣ą╝čā ą┐ąŠč湥ą╝čā) ąŚą░ą┐ąĖčüą░ą╗ ą▓ "čģąŠą╗ąŠčüčéčŗąĄ" EA60. ąóą░ą║ čā ą╝ąĄąĮčÅ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī ąĮą░ ą▓ąĄčĆčüąĖąĖ 1. ąØąĄ ąĘąĮą░čÄ. ąÆąŠąĘą╝ąŠąČąĮąŠ ą┐čĆąĖ ą┐čāčüą║ąĄ ąŠą▒ąŠčĆąŠčéčŗ čā ą╝ąŠč鹊 ą╝ąĄąĮčīčłąĄ 480? ąś ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÅ čüč湥čé ąŠčé ą┐ąĄčĆą▓ąŠą╣ ąĖ ą▓č鹊čĆąŠą╣ ą╝ąĄčéą║ąĖ čāą╝ąĮąŠąČą░čÅ ąĮą░ ąĘą░ą┤ąĄčƹȹ║čā ą┐ąŠ 500ąŠą▒, čüą┤ą▓ąĖą│ą░čéčī čāą│ąŠą╗ ąĄčēąĄ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Flash.#13
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŻą×ąŚ ąĮą░ ą▒ą░ąĘąĄ AC-CDI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ąĮąŠčÅ 19, 2019 20:53:35 |
|
| ąöąĄčƹȹĖčé ą┐ą░čÅą╗čīąĮąĖą║ čģą▓ąŠčüč鹊ą╝ |
|
ąÜą░čĆą╝ą░: 20
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 153
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą░ą┐čĆ 12, 2014 23:46:03
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 965
ą×čéą║čāą┤ą░: ąÜąĖąĄą▓
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
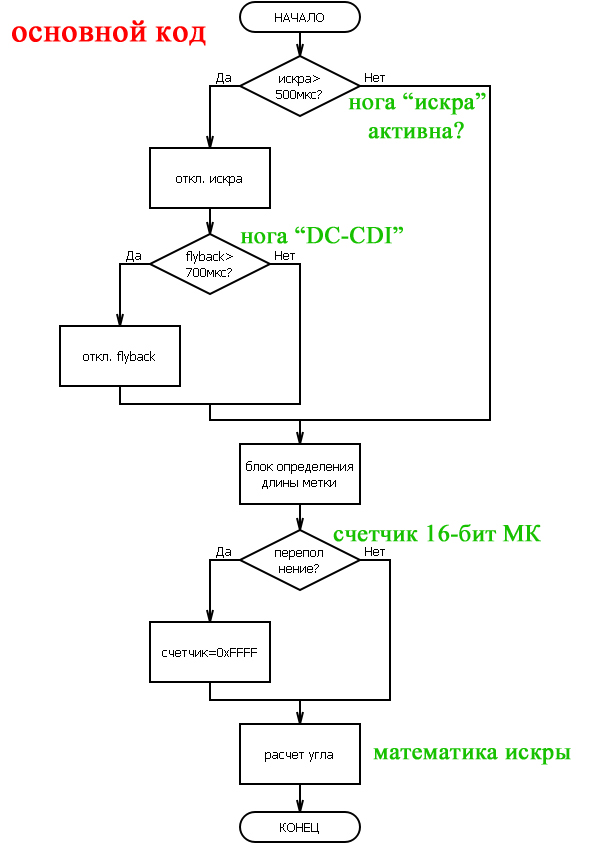
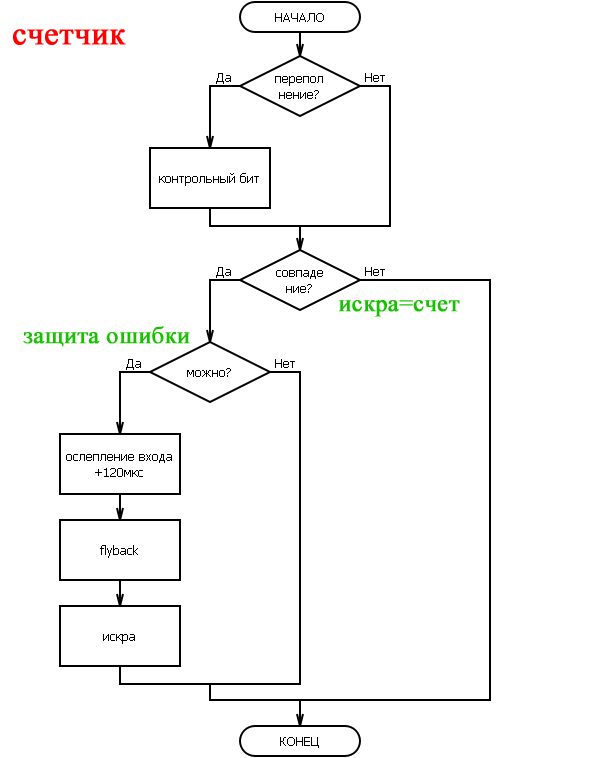
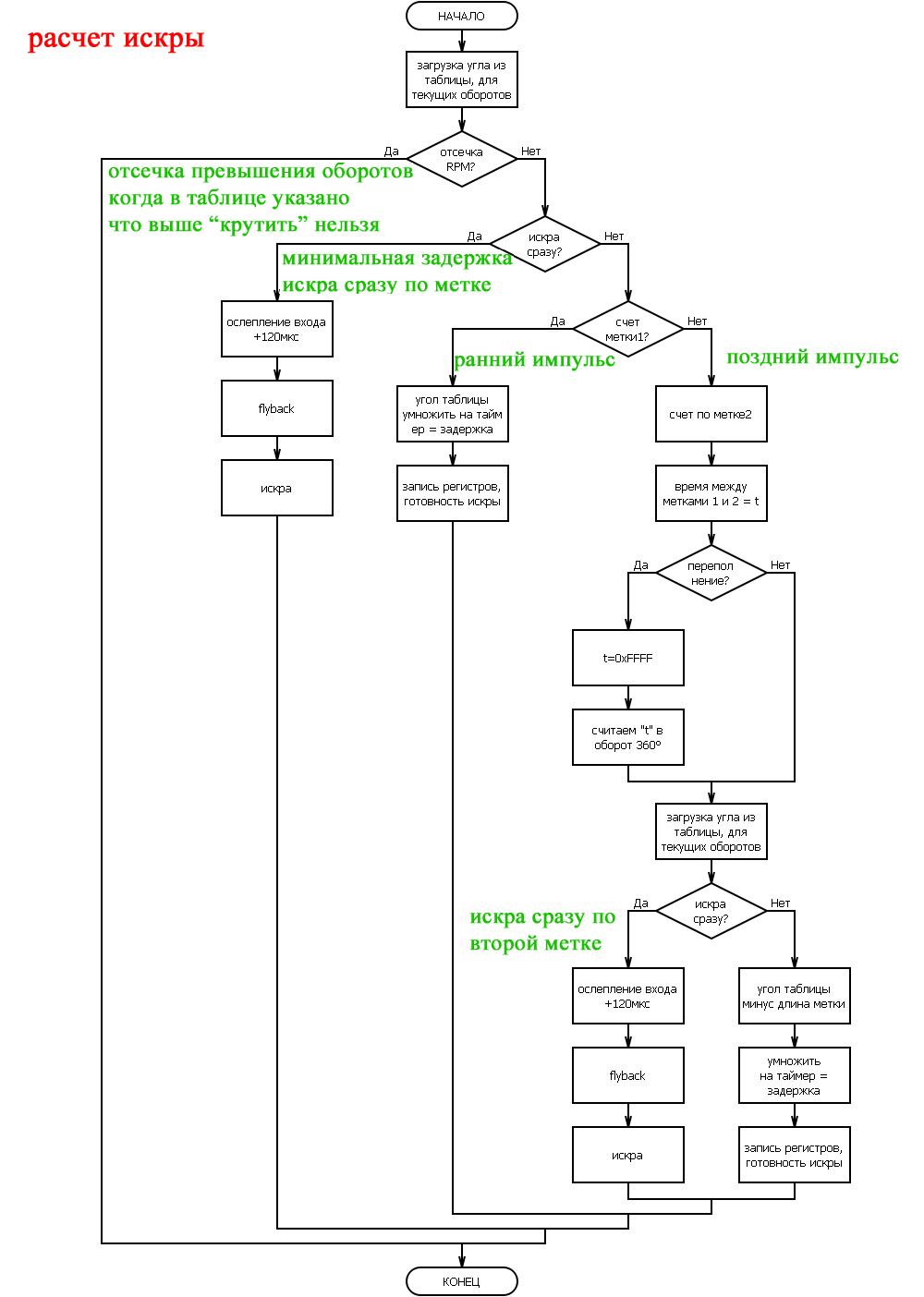
ąśąĘ čāą▓ąĖą┤ąĄąĮąĮčŗčģ ą┐čĆąŠą│čĆą░ą╝ą╝ ąŠčüčéą░ąĮąŠą▓ąĖą╗čüčÅ ąĮą░ čĆąĖčüąŠą▓ą░ą╗ą║ąĄ AFCE, ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ čāą┤ąŠą▒ąĮąŠ čģąŠčéčÅ ąĖ čüąĖą╗čīąĮąŠ ąŠą│čĆą░ąĮąĖč湥ąĮąŠ. ą¤čĆąĖ ą┐ąŠčüčéčĆąŠą╣ą║ąĄ ą▒ą╗ąŠą║-čüčģąĄą╝čŗ ą╝ąĮąŠą│ąĖąĄ čāąĘą╗čŗ čāą┐čĆąŠčüčéąĖą╗, ąĖąĮą░č湥 čĆąĖčüąŠą▓ą░ąĮąĖąĄ ąĘą░ąĮčÅą╗ąŠ čüą╗ąĖčłą║ąŠą╝ ą┤ąŠą╗ą│ąŠ, ąĮąŠ ąŠčüąĮąŠą▓ąĮąŠą╣ ą║ąŠą┤ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ąĮą░ ą║ą░čĆčéąĖąĮą║ą░čģ. ąÉą▓č鹊ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą┤ą╗ąĖąĮčŗ ą╝ąĄčéą║ąĖ ą┐ąŠą║ą░ąĘčŗą▓ą░čéčī ąĮąĄ čüčéą░ą╗, ąŠąĮąŠ ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ čĆą░ą▒ąŠčéčā. ąĀąĖčüąŠą▓ą░ą╗ą║ą░ ąĮąĄ ąĘą░č鹊č湥ąĮą░ ą┐ąŠą┤ ą░čüčüąĄą╝ą▒ą╗ąĄčĆ, ą┐čĆąĖąĄą╝čŗ čĆą░ąĘąĮčŗąĄ, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┤ą╗čÅ ąÉąĪą£ čüčćąĖčéą░ąĄčéčüčÅ ąĮąŠčĆą╝ąŠą╣ ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗, ąĖ ą┐ąĄčĆąĄčģąŠą┤čŗ ą┐ąŠ ą┤ąĄčüčÅčéčī čĆą░ąĘ, ą░ ąĘą┤ąĄčüčī čüąŠą▓čüąĄą╝ ą▓čüąĄ ą┐ąŠ ąĪąĖ'čłąĮąŠą╝čā, ąĮąĖą║ą░ą║ąŠą│ąŠ GoTo    asel ą┐ąĖčüą░ą╗(ą░): ąØąĄ čüąĖą╗ąĄąĮ ą▓ ą╝ą░č鹥ą╝ą░čéąĖą║ąĄ...
ąŚą░č湥ą╝ ą▓ "holostie" ąĘą░ą┐ąĖčüčŗą▓ą░čéčī ą▓ R9R10 FFFF, ąĄčüą╗ąĖ ą┐ąŠč鹊ą╝ ą▓ "datchik2" ą┐ąŠč鹊ą╝ ąŠą┐čÅčéčī ą┐ąĖčłąĄą╝ ąŚą░č鹥ą╝ čćč鹊 čüčāčēąĄčüčéą▓čāąĄčé ąĘą░ą╝ąĄą┤ą╗ąĄąĮąĖąĄ ą▓ą░ą╗ą░, čāčüą╗ąŠą▓ąĖąĄ "holostie" ą╝ąŠąČąĄčé ąĮąĄ ą▓čŗą┐ąŠą╗ąĮąĖčéčüčÅ, ąĮąŠ ą╝ąĄąČą┤čā ą╝ąĄčéą║ą░ą╝ąĖ ąĘą░ą╝ąĄą┤ą╗ąĄąĮąĖąĄ ą┐ąŠčĆčłąĮčÅ ą▓ą┐ąŠą╗ąĮąĄ ą┤ąŠčüčéąĖą│ąĮąĄčé ąĘąĮą░č湥ąĮąĖčÅ ą┐čĆąĖ ą║ąŠč鹊čĆąŠą╝ ąŠąĮąŠ ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖą╗ąŠčüčī, ąĄčüą╗ąĖ ą▒čŗ čā ąĮą░čü ą▒čŗą╗ ą▓ąĄčüčī ąŠą▒ąŠčĆąŠčé, čĆą░čüč湥čé ą┐ąŠ R11R12 ą┤ąŠą╗ąČąĄąĮ čŹč鹊 čāčćąĖčéčŗą▓ą░čéčī, ą▓čŗ ąČąĄ čüą░ą╝ąĖ čüą║ąŠą╗čīą║ąŠ čĆą░ąĘ ą│ąŠą▓ąŠčĆąĖą╗ąĖ ąŠ č鹊čĆą╝ąŠąČąĄąĮąĖąĖ ą┐ąŠčĆčłąĮčÅ? ąĪčāčēąĄčüčéą▓čāąĄčé čéčĆąĖ čćą░čüčéąĮčŗčģ čüą╗čāčćą░čÅ ą┤ą╗čÅ ą▓č鹊čĆąŠą│ąŠ "ą┐ąŠąĘą┤ąĮąĄą│ąŠ" ąĖą╝ą┐čāą╗čīčüą░: - ąŠą▒ąŠčĆąŠčéčŗ ą▒ąŠą╗ąĄąĄ 460/ą╝ąĖąĮ, ąĮąŠčĆą╝ą░ą╗čīąĮčŗą╣ čüč湥čé ą╝ą░č鹥ą╝ą░čéąĖą║ąĖ ąĖąĘ čéą░ą▒ą╗ąĖčåčŗ; - ąŠą▒ąŠčĆąŠčéčŗ 60...460/ą╝ąĖąĮ, čāčüą╗ąŠą▓ąĖąĄ "holostie" ą╝ąĄąČą┤čā ą╝ąĄčéą║ą░ą╝ąĖ ąĮąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé, ąĮąŠ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą┐čĆąĖ ą┐ąŠą╗ąĮąŠą╝ ąŠą▒ąŠčĆąŠč鹥, čāą│ąŠą╗ ą▒čāą┤ąĄčé ąĖąĘ ą┐ąĄčĆą▓ąŠą╣ čÅč湥ą╣ą║ąĖ čéą░ą▒ą╗ąĖčåčŗ, R9=0xFF; - ąŠą▒ąŠčĆąŠčéčŗ ą╝ąĄąĮąĄąĄ 60/ą╝ąĖąĮ, čāčüą╗ąŠą▓ąĖąĄ "holostie" ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą╝ąĄąČą┤čā ąĖą╝ą┐čāą╗čīčüą░ą╝ąĖ ą┤ą░čéčćąĖą║ąŠą▓, R9:R10=0xFFFF, R11:R12=0xFFFF, R13:R14=R24:FF asel ą┐ąĖčüą░ą╗(ą░): ą▓čŗčćąĖčüą╗čÅąĄą╝ ąĘą░ą┤ąĄčƹȹ║čā ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ R13R14 ąĖ ą┐čĆąĖą▒ą░ą▓ą╗čÅąĄą╝ ą║ R11R12. ą¤ąŠč湥ą╝čā ąĮąĄ čéą░ą║ ... (R25-R23) ąĖ ą▓čŗčćąĖčüą╗čÅąĄą╝ ąĘą░ą┤ąĄčƹȹ║čā ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ R11R12?? ą¦č鹊ą▒čŗ ą┤ąĄą╗ą░čéčī ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ ąĮą░ ą▒ą░ąĘąĄ R11R12 ąĮčāąČąĮąŠ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ąĖčģ ą▓ 0.7┬░, ą░ čéą░ą╝ ą║ą░ą║ čĆą░ąĘ čŹč鹊 ąĖ čüą┤ąĄą╗ą░ąĮąŠ, R13R14 čŹč鹊 1.4┬░ ąŻ ą╝ąĄąĮčÅ ą▓čüčéčĆąĄčćąĮčŗą╣ ą▓ąŠą┐čĆąŠčü, ąĄčüą╗ąĖ ą▓čŗ ąĮąĄ čüąĖą╗čīąĮčŗ ą▓ ą╝ą░č鹥ą╝ą░čéąĖą║ąĄ ąĖ ą║ąŠą┤ąĖąĮą│ąĄ ąÉąĪą£, ąĘą░č湥ą╝ čĆąĄąĘą░čéčī ąĖ ą╝čāčćąĖčéčüčÅ čü ą║ąŠą┤ąŠą╝? ą¤ąŠč湥ą╝čā ą┐čĆąŠčüč鹊 ąĮąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠčĆąĖą│ąĖąĮą░ą╗?
_________________
ąØąĄą╝ąĮąŠą│ąŠ čäą░ą╣ą╗ąŠą▓ ą┐ąŠ ąĘą░ąČąĖą│ą░ąĮąĖčÄ: ążąŻą×ąŚ 2.2 + ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆą░ą▓ą║ąĖ čéą░ą▒ą╗ąĖčå 0.987, ą╝ąŠąĮčéą░ąČą║ą░
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Arwood
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŻą×ąŚ ąĮą░ ą▒ą░ąĘąĄ AC-CDI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąĮąŠčÅ 20, 2019 05:56:50 |
|
| ąöąĄčƹȹĖčé ą┐ą░čÅą╗čīąĮąĖą║ čģą▓ąŠčüč鹊ą╝ |
|
ąÜą░čĆą╝ą░: 1
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 62
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé čÅąĮą▓ 13, 2011 13:51:26
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 986
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ążą╗čŹčł, ąĮąĄ čü č鹊ą│ąŠ ąĮą░čćą░ą╗.
ąĪąĮą░čćą░ą╗ą░ ąŠą▒čēą░čÅ čüčéčĆčāą║čéčāčĆą░. ąÆ ą║ą░ą║ąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮčŗ čŹčéąĖ ą▒ą╗ąŠą║ąĖ?
ąŚą░č鹥ą╝ ą▓čŗą╗ąŠąČąĄąĮąĮčŗąĄ ą▒ą╗ąŠą║ąĖ.
ąś ąĮą░ą║ąŠąĮąĄčå ą║čāčüąŠą║ ą║ąŠą┤ą░ ą┐ąŠ ą║ą░ąČą┤ąŠą╝čā ą▒ą╗ąŠą║čā.
ąÉ ąĖąĮą░č湥, čŹč鹊 ą▓čüčæ ą╗ąĖčłčī ąĖą╝ąĖčéą░čåąĖčÅ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
asel
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŻą×ąŚ ąĮą░ ą▒ą░ąĘąĄ AC-CDI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąĮąŠčÅ 20, 2019 07:46:15 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čÅąĮą▓ 06, 2015 11:00:44
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 750
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
Flash.#13
ą×čĆąĖą│ąĖąĮą░ą╗ "čüčŗčĆąŠą╣" ąĖ ąĮąĄąŠč鹥čüą░ąĮčŗą╣.
ą» ą┐ąŠąĮąĖą╝ą░čÄ, čćč鹊 2čģ2=4. ąØąŠ ąĘą░č湥ą╝ ą┤ąĄą╗ą░čéčī 2čģ5-6=4? ąØąĄą┐ąŠąĮąĖą╝ą░čÄ.
ą¤ąŠč鹊ą╝ ąĮąĄą╝ąĮąŠą│ąŠ ą┐ąŠąĮčÅą╗
čćč鹊 ą┐čĆąĖ 600ąŠą▒ 50027ąĖą╝ą┐čāą╗čīčüąŠą▓, ą░ ą┐čĆąĖ 500ąŠą▒ 60124ąĖą╝ą┐čāą╗čīčüą░, ąĖ ąĖčģ ąĮčāąČąĮąŠ ą║ą░ą║ č鹊 ą┐čĆąĖą▓ąĄčüčéąĖ ą║ 360ą│čĆą░ą┤čāčüą░ą╝.
ą¤ąŠč鹊ą╝ ąĄčēąĄ ą┐ąŠąĮčÅą╗, čćč鹊 ą▓čŗ ą┤ąĄą╗ą░ąĄč鹥 ą┐čĆąŠą│čĆą░ą╝ą╝čā čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčāčÄ 2.1. ąś čéą░ą║ ą║ą░ą║ ą┤ą╗ąĖąĮą░ ą╝ąĄčéą║ąĖ čĆą░ąĘąĮą░čÅ, č鹊 ąĮčāąČąĮąŠ čüą┤ąĄą╗ą░čéčī čéą░ą║ąĖąĄ čüą╗ąŠąČąĮčŗąĄ č乊čĆą╝čāą╗čŗ čĆą░čüč湥č鹊ą▓. ąøą░ą┤ąĮąŠ čü čŹčéąĖą╝. ą¤ąŠą▓ąĄčĆąĖą╝ ą▓ą░čłąĖą╝ čĆą░čüč湥čéą░ą╝.
ąĢčēąĄ ą▓ąŠą┐čĆąŠčü. ąĀą░ąĘ čāąČąĄ ą┐ąŠčłą╗ąĖ ąĮąĖąČąĄ 460ąŠą▒ąŠčĆąŠč鹊ą▓ ą▓ ą▓ąĄčĆčüąĖąĖ 2.1, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ą╗ąĄą│č湥 ą┐ąŠčüčćąĖčéą░čéčī , ąŠčéčéą░ą╗ą║ąĖą▓ą░čÅčüčī ąŠą▒ąŠčĆąŠčéą░ ą┐ąŠ ą┤ą╗ąĖąĮąĄ ą╝ąĄčéą║ąĖ.
600ąŠą▒ąŠčĆ = 50027ąĖą╝ą┐čāą╗čīčüąŠą▓ = ąĪ36ąÆ ---ąĪ3 ąĖąĮą▓ąĄčĆčéąĖčĆčāąĄą╝ = 60.
500ąŠą▒ąŠčĆ = 600124ąĖą╝ą┐čāą╗čīčüą░ = ąĢąÉDC ---EA ąĖąĮą▓ąĄčĆčéąĖčĆčāąĄą╝ = 21
460ąŠą▒ąŠčĆ = ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ =FFFF
ą¤ąŠč湥ą╝čā ą▓ čéą░ą▒ą╗ąĖčåąĄ ąĮąĄčé čćąĖčüą╗ą░ 21?
ąØąĄą╝ąĮąŠą│ąŠ čéą░ą║ąČąĄ ąĮąĄ ą┐ąŠąĮąĖą╝ą░čÄ. ąÆ čéą░ą▒ą╗ąĖčåąĄ ą║čĆą░ą╣ąĮąĄąĄ čćąĖčüą╗ąŠ 60, čćč鹊 ąĄčüčéčī 600ąŠą▒ąŠčĆąŠč鹊ą▓. ąÉ ą▓ ą│čĆą░čäąĖą║ąĄ ą║čĆą░ą╣ąĮąĄąĄ čćąĖčüą╗ąŠ 500ąŠą▒ąŠčĆąŠč鹊ą▓. ąó.ąĄ. ą▓čüąĄ čćč鹊 ąĮąĖąČąĄ 600ąŠą▒ąŠčĆąŠč鹊ą▓ čĆą░čüčćąĖčéčŗą▓ą░ąĄčéčüčÅ ą║ą░ą║ FFFF?.
ą¤čü. ąÆąŠąĘą╝ąŠąČąĮąŠ čŹč鹊 ąĖ ą╗ąĖčłąĮąĄąĄ.
ąŚąĖą╝ą░ ą┤ąŠą╗ą│ą░čÅ, ą┐ąŠą║ą░ ąĄčēąĄ "čüč鹥ąĮą┤" ąĮąĄ ą▓ą║ą╗čÄčćą░ą╗...
ą¤ąŠą┐čĆąŠą▒čāčÄ čéą░ą║ąČąĄ ąĮą░čĆąĖčüąŠą▓ą░čéčī ą▓čüčÄ ą▒ą╗ąŠą║-čüčģąĄą╝čā ą┤ą╗čÅ čüąĄą▒čÅ. ąĢčüčéčī ą┐ą░čĆčā ąĮčÄą░ąĮčüąŠą▓, čāčćč鹥ąĮčŗ ą╗ąĖ ąŠąĮąĖ?
ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ čĆą░ąĘ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī asel ąĪčĆ ąĮąŠčÅ 20, 2019 08:58:18, ą▓čüąĄą│ąŠ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī 2 čĆą░ąĘ(ą░).
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ats4
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŻą×ąŚ ąĮą░ ą▒ą░ąĘąĄ AC-CDI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąĮąŠčÅ 20, 2019 07:50:52 |
|
| ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā! |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ąĮąŠčÅ 20, 2019 07:26:50
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 20
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąŚą┤čĆą░ą▓čüčéą▓čāą╣č鹥. ą¤ąŠą┤čüą║ą░ąČąĖč鹥 ąĮą░ čćč鹊 ąŠą▒čĆą░čéąĖčéčī ą▓ąĮąĖą╝ą░ąĮąĖąĄ. ą£ąŠą┐ąĄą┤ ą┤ąĄą╗čīčéą░ 72čüčü, ą┐čĆąŠčłąĖą▓ą║ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ v2.1, ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąĮąĖč湥ą│ąŠ ąĮąĄ ą┐čĆą░ą▓ąĖą╗. ą¤čĆąŠą▒ą╗ąĄą╝ą░ čüą╗ąĄą┤čāčÄčēą░čÅ: ą╝ąŠą┐ąĄą┤ ąĘą░ą▓ąŠą┤ąĖčéčüčÅ ąĖ čĆą░ą▒ąŠčéą░ąĄčé ąĮąĄ čüčĆąĄą┤ąĮąĖčģ ąĖ ą▒ąŠą╗čīčłąĖčģ ąŠą▒ąŠčĆąŠčéą░čģ, ąĮąŠ čüą▓ąĄč鹊ą┤ąĖąŠą┤ ąĮąĄ čéčāčģąĮąĄčé. ąØą░ ą╝ą░ą╗čŗčģ ąŠą▒ąŠčĆąŠčéą░čģ čĆą░ą▒ąŠčéą░ąĄčé čüąĄą║čāąĮą┤ 10 ąĖ ą│ą╗ąŠčģąĮąĄčé. ąŚą░ą▓ąĄčüčéąĖ ą╝ąŠąČąĮąŠ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ ą┐ąŠą╗ąĮąŠą│ąŠ čüąĮčÅčéąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ čü ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, čüą▓ąĄč鹊ą┤ąĖąŠą┤ ą┐čĆąĖ čŹč鹊ą╝ ą┐ąŠčéčāčłąĄąĮ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Flash.#13
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŻą×ąŚ ąĮą░ ą▒ą░ąĘąĄ AC-CDI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąĮąŠčÅ 20, 2019 11:56:52 |
|
| ąöąĄčƹȹĖčé ą┐ą░čÅą╗čīąĮąĖą║ čģą▓ąŠčüč鹊ą╝ |
|
ąÜą░čĆą╝ą░: 20
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 153
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą░ą┐čĆ 12, 2014 23:46:03
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 965
ą×čéą║čāą┤ą░: ąÜąĖąĄą▓
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ats4 č鹊 čćč鹊 ąĮąĄ čéčāčģąĮąĄčé ą┤ąĖąŠą┤ ą│ąŠą▓ąŠčĆąĖčé čćč鹊 ą£ąÜ ąĮąĄ čüą╝ąŠą│ ą┐čĆąŠą▓ąĄčüčéąĖ "ą░ą▓č鹊ąĘą░ą╝ąĄčĆ", čāą│ąŠą╗ ą┤ą░čéčćąĖą║ą░ ąĮčāąČąĮąŠ čüą╝ąŠčéčĆąĄčéčī "ą▓čĆčāčćąĮčāčÄ", čüąŠą▒ąĖčĆą░čÄčüčī č鹥čüčéąĖčĆąŠą▓ą░čéčī 2.1 ąĮą░ ą╝ąŠč鹊, ą╝ąŠąČąĄčé čāą▓ąĖąČčā ąĄčēąĄ č湥ą│ąŠ, 2.1 ąĄčēąĄ ąĮąĄ ąĖčüą┐čŗčéčŗą▓ą░ą╗ą░čüčī ąĮą░ čĆąĄą░ą╗čīąĮąŠą╣ č鹥čģąĮąĖą║ąĄ asel čāą│ąŠą╗ ą▓ čéą░ą▒ą╗ąĖčåąĄ ąĘą░ą┤ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣ ą┐čĆą░ą▓ą║ąĖ ą│čĆą░čäąĖą║ą░, ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü 0...600..., ąĖ ąĮąĖč湥ą│ąŠ ąĮąĄ ą╝ąĄčłą░ąĄčé ą║ą╗ąĖą║ąĮčāčéčī ą╝čŗčłą║ąŠą╣, ąĖ ąĘą░ą┤ą░čéčī čéą░ą╝ 500/ą╝ąĖąĮ. Arwood ą┐ąŠąĮąĖą╝ą░čÄ ąŠ č湥ą╝ ą▓čŗ, ąĮąŠ ą┤ąĄą╗ą░čéčī čéą░ą║ąŠą╣ ą┤ąĄčéą░ą╗čīąĮčŗą╣ čĆą░ąĘą▒ąŠčĆ ą▒čāą┤ąĄčé ąŠč湥ąĮčī ą┤ąŠą╗ą│ąŠ, ą┐čĆąĖą╝ąĄčĆąĮąŠ ą║ą░ą║ ą┐ąĖčüą░čéčī čüą░ą╝ ą║ąŠą┤, ą┐čĆąĖ č鹊ą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčéčā čéą░ą║ąŠąĄ čĆą░ąĘąČąĄą▓čŗą▓ą░ąĮąĖąĄ ąĖ ąĮąĄąĮčāąČąĮąŠ, ąŠąĮ čüčĆą░ąĘčā ą┐ąŠą╣ą╝ąĄčé čćč鹊 ą▓ąĮčāčéčĆąĖ, ą░čüčüąĄą╝ą▒ą╗ąĄčĆ ą┐čĆąŠčüč鹊ą╣ čÅąĘčŗą║, ą░ čüą░ą╝ąŠą│ąŠ ą║ąŠą┤ą░ čéą░ą╝ ą▓čüąĄą│ąŠ 8 čüčéčĆą░ąĮąĖčå ąÉ4. ąÜ č鹊ą╝čā ąČąĄ ą┤ą╗čÅ ąÉąÆąĀ ą┤ąĄą╗ą░čéčī ą┐ąŠą┤ąŠą▒ąĮčŗąĄ ą┐čĆąŠąĄą║čéčŗ ąĮąĄ ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ ą┐ą╗ąŠčģąŠ, ąĮą░ ąĪąĖ ąŠąĮąŠ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī č鹊ą╗čīą║ąŠ čü STM32, čā ą╝ąĄą│ąĖ8 ąĮąĄ č鹊 čÅą┤čĆąŠ. ąóąĄą║čāčēą░čÅ ą┐čĆąŠą▒ą╗ąĄą╝ą░ ąĮąĄ ą▓ čÅąĘčŗą║ąĄ, ą░ ą▓ č鹊ą╝ čćč鹊 ą╝ąĮąĄ ąĮčāąČąĮąŠ ąĖą┤čéąĖ, ąĖ ąĖčüą┐čŗčéčŗą▓ą░čéčī ą┐ą╗ą░čéčā ąĮą░ ą╝ąŠč鹊, ą░ čéą░ą║ą░čÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čüąĄą╣čćą░čü ąĄčüčéčī.
_________________
ąØąĄą╝ąĮąŠą│ąŠ čäą░ą╣ą╗ąŠą▓ ą┐ąŠ ąĘą░ąČąĖą│ą░ąĮąĖčÄ: ążąŻą×ąŚ 2.2 + ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆą░ą▓ą║ąĖ čéą░ą▒ą╗ąĖčå 0.987, ą╝ąŠąĮčéą░ąČą║ą░
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ats4
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŻą×ąŚ ąĮą░ ą▒ą░ąĘąĄ AC-CDI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąĮąŠčÅ 20, 2019 12:26:32 |
|
| ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ čüą║ą░ąĘą░ą╗ ą£čÅčā! |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ąĮąŠčÅ 20, 2019 07:26:50
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 20
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
Flash.#13 ą╝ąĄąĮčÅ čüą╝čāčēą░ąĄčé č鹊, čćč鹊 ąĮą░ ą╝ą░ą╗čŗčģ ąŠą▒ąŠčĆąŠčéą░čģ čüąĄą║čāąĮą┤ č湥čĆąĄąĘ 10 ą┤ą▓ąĖą│ą░č鹥ą╗čī ą│ą╗ąŠčģąĮąĄčé ąĖ ą┤ąŠ ą┐ąŠą╗ąĮąŠą│ąŠ čüąĮčÅčéąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ąĄą│ąŠ ąĮąĄ ąĘą░ą▓ąĄą┤ąĄčłčī. ąØą░ v2.0 ąĮą░ą▒ą╗čÄą┤ą░ą╗ąŠčüčī čćč鹊 č鹊 ą┐ąŠčģąŠąČąĄąĄ, ą┐ąŠčŹč鹊ą╝čā ą│čĆąĄčłčā ąĮą░ ąČąĄą╗ąĄąĘąŠ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
asel
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŻą×ąŚ ąĮą░ ą▒ą░ąĘąĄ AC-CDI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąĮąŠčÅ 20, 2019 13:07:37 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čÅąĮą▓ 06, 2015 11:00:44
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 750
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
Flash.#13 ąśčüą┐čŗčéčŗą▓ą░čéčī ąĮčāąČąĮąŠ ąĮą░ čüč鹥ąĮą┤ąĄ. ą£ąŠč鹊čĆčćąĖą║-ą┤ąĖčüą║-ą╝ąĄčéą║ą░-ą┤ą░čéčćąĖą║-ą┤ą▓čāčģą╗čāč湥ą▓ąŠą╣ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░čä. ąÆčüąĄ ą▓ąĖą┤ąĮąŠ. ąØą░ą┐čĆąĖą╝ąĄčĆ ą┐čĆąĖ ą┐čāčüą║ąĄ. ą£ąŠč鹊čĆčćąĖą║ ą▓čĆą░čēą░ąĄčéčüčÅ. ą×čüčåąĖą╗ą╗ąŠą│čĆą░čä ą▓ čüąĖąĮą│ą╗. ąÆą║ą╗čÄčćą░ąĄč鹥 ą┐ąĖčéą░ąĮąĖąĄ ąĮą░ ążčāąŠąĘ. ąś ąŠčüčåąĖą╗ąŠą│čĆą░čä ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĖ ą┐ąĄčĆą▓čŗą╣ ąĖ ą▓č鹊čĆąŠą╣ ąĖ čéčĆąĄčéąĖą╣ ąĖą╝ą┐čāą╗čīčüčŗ. ąøą░ą┤ąĮąŠ. ąÆ "norm" ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗąĄ ąŠą▒ąŠčĆąŠčéčŗ 600. =60 ą£ąŠąČąĮąŠ ą╗ąĖ ą┤ąŠą┐ąĖčüą░čéčī, ą▓ą┐ąĖčüą░čéčī, ą┤ąŠą▒ą░ą▓ąĖčéčī čüčéčĆąŠčćą║čā (ąĖą╗ąĖ ą║ą░ą║ ą▓ą░ą╝ ąĄčēąĄ ąŠą▒čŖčÅčüąĮąĖčéčī) 500ąŠą▒. =21? ąó.ąĄ. ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ , ą▓čüąĄčćč鹊 ąĮąĖąČąĄ 600, čŹč鹊 ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ. cpi R21, 60 ;čüčĆą░ą▓ąĮąĄąĮąĖąĄ ąĀą×ąØ čü ą║ąŠąĮčéčüčéą░ąĮč鹊ą╣ brsh rpm0k6 ;ąĄčüą╗ąĖ ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠ cpi R21, 21 brsh rpm0k5 clr R26 ;ąĄčüą╗ąĖ 500 ąĖ ą╝ąĄąĮčīčłąĄ ąŠą▒/ą╝ąĖąĮ ąĮčā ąĖ čéą░ą╝ ą┤ą░ą╗ąĄąĄ ą┐ąŠą╝ąĄąĮčÅčéčī. ąÆ č湥ą╝ ą┐čĆąŠą▒ą╗ąĄą╝ą░? ą¤ąĪ. ą¤ąŠą┐čĆąŠą▒čāčÄ ąĮą░ čüą┤ąĄąĮą┤ąĄ ą▓čüąĄ čüč乊čéą║ą░čéčī čü ąŠčüčåąĖą╗ą╗ąŠą│čĆą░čäą░ ąĖ ą▓čŗą╗ąŠąČąĖčéčī. ąÜą░ą║ ąŠąĮąŠ ąĄčüčéčī ą▓ čĆąĄą░ą╗čīąĮąŠčüčéąĖ. ą¤ąĪ2. ąÆ v.1 ą┤ąŠą┐ąĖčüą░ą╗ ą▓ąŠčé čéą░ą║. ą¤ąŠčüą╝ąŠčéčĆąĖą╝, čćč鹊 čŹč鹊 ą┤ą░ąĄčé ą▓ čĆąĄą░ą╗ąĄ.. 32 čüčéčĆąŠą║ąĖ, ą║ą░ą║ ąĖ ąĮą░ą┐ąĖčüą░ąĮąŠ. ąÉ ąĮąĄ 31. ąó.ąĄ. 500ąŠą▒ ąĖąĘ čéą░ą▒ą╗ąĖčåčŗ ą▒čāą┤ąĄčé ą║ą░ą║ ą┐ąŠą╗ąŠąČąĄąĮąŠ 500ąŠą▒. ąÉ ąĮąĖąČąĄ 500ąŠą▒ ą▒čāą┤ąĄčé FFFF cpi R21, 60 ;čüčĆą░ą▓ąĮąĄąĮąĖąĄ ąĀą×ąØ čü ą║ąŠąĮčéčüčéą░ąĮč鹊ą╣ brsh rpm0k6 ;ąĄčüą╗ąĖ ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠ cpi R21, 21 ;čüčĆą░ą▓ąĮąĄąĮąĖąĄ ąĀą×ąØ čü ą║ąŠąĮčéčüčéą░ąĮč鹊ą╣ brsh rpm0k5 ;ąĄčüą╗ąĖ ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠ rjmp RpmEnd ;ą▓čüąĄą│ąŠ 32čüčéčĆąŠą║ąĖ ............... rpm0k6: ldi R26, 0x01 rjmp RpmEnd rpm0k5: ldi R26, 0x00 ;ą░ą┤čĆąĄčü ą×ąŚąŻ "lowąź" ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ;ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąĮąŠ ą×ąŚąŻ 0čģ0100-0čģ011F,32čüčéčĆąŠą║ąĖ RpmEnd:
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Flash.#13
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŻą×ąŚ ąĮą░ ą▒ą░ąĘąĄ AC-CDI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąĮąŠčÅ 20, 2019 17:22:20 |
|
| ąöąĄčƹȹĖčé ą┐ą░čÅą╗čīąĮąĖą║ čģą▓ąŠčüč鹊ą╝ |
|
ąÜą░čĆą╝ą░: 20
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 153
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą░ą┐čĆ 12, 2014 23:46:03
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 965
ą×čéą║čāą┤ą░: ąÜąĖąĄą▓
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
ats4 ą┐ąŠąĮčÅą╗ ą▓ą░čü, čüą║ąŠčĆąŠ ą▒čāą┤čā č鹥čüčéąĖčĆąŠą▓ą░čéčī ąĮą░ ą╝ąŠč鹊čĆąĄ čā čüąĄą▒čÅ, ą┤čāą╝ą░čÄ ą▓čŗą╗ąĄąĘąĄčé ąĖ čüą╝ąŠą│čā ą▓čŗą╗ąĄčćąĖčéčī. ą¤ąŠčģąŠąČąĄ ąĮą░ ą░ą▓č鹊ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čāą│ą╗ą░, čćč鹊 ą£ąÜ ąĮąĄ ą╝ąŠąČąĄčé ąĄą│ąŠ ą║ąŠčĆčĆąĄą║čéąĮąŠ ąĮą░čēčāą┐ą░čéčī, ą┐ąŠą┐čĆąŠą▒čāą╣č鹥 ą┐ąŠą┤ąŠą▒čĆą░čéčī čāą│ąŠą╗ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą┐čĆą░ą▓ą║ąĖ ą│čĆą░čäąĖą║ą░, ą┐ą░čĆą░ą╝ąĄčéčĆ "ą┤ą╗ąĖąĮą░ ą╝ąĄčéą║ąĖ", čŹč鹊 ą┤ą╗ąĖąĮą░ ą╝ą░ą│ąĮąĖčéąĮąŠą│ąŠ ąĮą░ą┐ą╗čŗą▓ą░.  asel asel ąĖąĘą╝ąĄąĮąĖčéčī čüčéčĆąŠčćą║čā ą╝ąŠąČąĮąŠ ą▒ąĄąĘ ą┐čĆąŠą▒ą╗ąĄą╝, čģąŠčéčī ąĮą░ 01, čüą║ąŠą╗čīą║ąŠ čŹč鹊 ą▓ ąŠą▒ąŠčĆąŠčéą░čģ ąĮčāąČąĮąŠ čüčćąĖčéą░čéčī, ą░ ą▓ąŠčé ą┤ąŠą▒ą░ą▓ąĖčéčī ąĄąĄ čüą╗ąŠąČąĮąĄąĄ, čüąĄą╣čćą░čü ą▓ čéą░ą▒ą╗ąĖčåąĄ ą×ąŚąŻ 32 čüčéčĆąŠą║ąĖ. ą¦ąóąŠą▒čŗ ąĮąĄ ą╝čāčćąĖčéčüčÅ ą▓ąŠąĘčīą╝ąĖč鹥 ąŠčĆąĖą│ąĖąĮą░ą╗ ąĖ ą▓ ą┐čĆąŠą│ą░ą╝ą╝ąĄ ą│čĆą░čäąĖą║ąŠą▓ ąĖąĘą╝ąĄąĮąĖč鹥 ąŠą▒ąŠčĆąŠčéčŗ ąĮą░ 500/ą╝ąĖąĮ, ąĮą░ąČą╝ąĖč鹥 čüąŠčģčĆą░ąĮąĖčéčī ąĖ ą┐ąŠčüą╝ąŠčéčĆąĖč鹥 ą║ą░ą║ ąŠąĮą░ ąĖąĘą╝ąĄąĮąĖčé ąĘąĮą░č湥ąĮąĖąĄ ąĮą░ č鹊ą╣ ą┐čĆąĄą┤ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ čüčéčĆąŠčćą║ąĄ.
_________________
ąØąĄą╝ąĮąŠą│ąŠ čäą░ą╣ą╗ąŠą▓ ą┐ąŠ ąĘą░ąČąĖą│ą░ąĮąĖčÄ: ążąŻą×ąŚ 2.2 + ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆą░ą▓ą║ąĖ čéą░ą▒ą╗ąĖčå 0.987, ą╝ąŠąĮčéą░ąČą║ą░
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
asel
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŻą×ąŚ ąĮą░ ą▒ą░ąĘąĄ AC-CDI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąĮąŠčÅ 20, 2019 20:05:28 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čÅąĮą▓ 06, 2015 11:00:44
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 750
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
Flash.#13
ą¤ąŠą╝ąĄąĮčÅą╗.
ąæčŗą╗ąŠ 460-600-700
ąĪčéą░ą╗ąŠ 460-500-600.
ą¤čĆąŠčüč鹊 ąĮčāąČąĮąŠ ąĮąŠčĆą╝ą░ą╗čīąĮąŠ ą┐ąĖčüą░čéčī ąŠą┐ąĖčüą░ąĮąĖąĄ ąĖ čé.ą┐. . ą¦č鹊 460 čŹč鹊 ąĮąĄ 460. ąÉ ą▓čüąĄ čćč鹊 ąĮąĖąČąĄ 600, ąĖą╗ąĖ (ą┐ąŠ č鹊ą╝čā ą║ą░ą║ čüčéą░ą╗ąŠ) ąĮąĖąČąĄ 500. ąóčŗ ąČąĄ ą▒ąŠčĆąĄčłčīčüčÅ čü ą┐čāčüą║ąŠą╝ čéą░ą┐ą║ąŠą╣. ąÜą░ą║ąĖąĄ ąŠą▒ąŠčĆąŠčéčŗ ą┐čĆąĖ ą┐čāčüą║ąĄ ą╗ą░ą┐č鹥ą╝?
ąØąŠ ąĄčüą╗ąĖ čüą┤ąĄą╗ą░čéčī čéą░ą║, č鹊 č鹥čĆčÅąĄą╝ ąŠą┤ąĮčā čüčéčĆąŠčćą║čā ą▓ čéą░ą▒ą╗ąĖčåąĄ.
ąÉ ą┐ąŠč湥ą╝čā ąĮąĄą╗čīąĘčÅ , ą║ą░ą║ čÅ ąĮą░ą┐ąĖčüą░ą╗ ą┐ąŠčüč鹊ą╝ ą▓čŗčłąĄ. ąöąŠą▒ą░ą▓ąĖą▓ čüčéčĆąŠčćą║čā. ąØčā čāą▒čĆą░ą╗ clr R26. ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ąĘą░ą▓ąĖčüąĮąĄčé?
ąĢčēąĄ. ąØą░čĆąĖčüąŠą▓ą░ą╗ ą▒ą╗ąŠą║-čüčģąĄą╝čā. ąś ą╝ąĮąŠą│ąŠ č湥ą│ąŠ "ą┐ąŠą╗ąĄąĘą╗ąŠ".
ąØčā čŹč鹊 ą║ąŠąĮąĄčćąĮąŠ "č乊ąĮčéą░ąĮ".
datchik2:
..
;ąĄčüą╗ąĖ ąĄčüčéčī čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ,čüčćąĖčéą░ąĄą╝ 0.7┬░
sbrs R20, 7 ;if bitX,n='0' then do
rjmp jmp1 ;ąŠč湥ąĮčī ąĮąĖąĘą║ąĖąĄ ąŠą▒ąŠčĆąŠčéčŗ
ser R16 ;R16=0xFF
mov R11,R16
mov R12,R16
jmp1:
ąŁč鹊 ąČ ą║ąŠą│ą┤ą░ ąĀ20, 7 ą▒čāą┤ąĄčé čĆą░ą▓ąĮąŠ 1? ąØčā ą┤ą░. ąĢčüčéčī ą▓ą░čĆąĖą░ąĮčé, ą║ąŠą│ą┤ą░ ą┤ą░čéčćąĖą║ čüč鹊ąĖčé ą╝ąĄąČą┤čā ą┐ąĄčĆą▓ąŠą╣ ąĖ ą▓č鹊čĆąŠą╣ ą╝ąĄčéą║ąŠą╣. ąś ąĘą░ą┐čāčüą║ą░ąĄą╝ ą╝ąŠč鹊čĆ. ąś čćč鹊 ą┤ą░ą╗čīčłąĄ? ąÆčüąĄ čĆą░ą▓ąĮąŠ ą▓čüąĄ ą┐ąŠą╣ą┤ąĄčé ąŠčé ą┐ąĄčĆą▓ąŠą╣ ą╝ąĄčéą║ąĖ....
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Flash.#13
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŻą×ąŚ ąĮą░ ą▒ą░ąĘąĄ AC-CDI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąĮąŠčÅ 20, 2019 20:58:57 |
|
| ąöąĄčƹȹĖčé ą┐ą░čÅą╗čīąĮąĖą║ čģą▓ąŠčüč鹊ą╝ |
|
ąÜą░čĆą╝ą░: 20
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 153
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪą▒ ą░ą┐čĆ 12, 2014 23:46:03
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 965
ą×čéą║čāą┤ą░: ąÜąĖąĄą▓
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
asel ą┐ąĖčüą░ą╗(ą░): ąØčā čāą▒čĆą░ą╗ clr R26. ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ąĘą░ą▓ąĖčüąĮąĄčé? ą×čéčĆąĄąĘą░ą╗ ą▒ąŠą╗čīąĮąŠą╝čā ąĮąŠą│čā, ą▓č鹊čĆą░čÅ ąŠčüčéą░ą╗ą░čüčī  ąÆčŗ ąČąĄ ąĮąĄ čüą╝ąŠčéčĆąĖč鹥 ąĘą░č湥ą╝ ąĮčāąČąĮčŗ čüčéčĆąŠą║ąĖ ą║ąŠč鹊čĆčŗąĄ čāą┤ą░ą╗čÅąĄč鹥, ąĘą░č鹥ą╝ ąŠą▒ą▓ąĖąĮčÅąĄč鹥, ą║ąŠą┤ "čüčŗčĆąŠą╣", ąĖ čéčÅąĮąĄč鹥čüčī "čāą╗čāčćčłą░čéčī". ąÆ čéą░ą▒ą╗ąĖčåąĄ 32 č鹊čćą║ąĖ, ą▓ąŠčé ą▓čŗ čāą▒čĆą░ą╗ąĖ ąŠą┤ąĮčā ąĖąĘ ąĮąĖčģ, ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĘą░ą▓ąĖčüąĮąĄčé? ąŻ ą▓ą░čü ąĄčüčéčī ąĘą░ą╝čŗčüąĄą╗ ąĘą░č湥ą╝ čŹč鹊 ą┤ąĄą╗ą░čéčī ąĖ ą║ą░ą║ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī? ąØą░ą┐ąĖčłąĖč鹥 ą║ąŠą┤ čü ąĮčāą╗čÅ! ąÉ č鹊 ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą║čĆąĖą▓ąŠą╣ ą╝ą░ą│ąĮąĖč鹊č乊ąĮ, ąŠčéčĆąĄąĘą░ą╗ąĖ, ą▓čĆąŠą┤ąĄ ąĄą┤ąĄčé, čĆąĄąČąĄą╝ ą┤ą░ą╗čīčłąĄ... ąĀą×ąØ20,7 ą▒čāą┤ąĄčé "1" ą║ąŠą│ą┤ą░ ą┐ąŠčĆčłąĄąĮčī ąŠčüčéą░ąĮąŠą▓ąĖčéčüčÅ ąĮąĄ ą┤ąŠą╣ą┤čÅ ą┤ąŠ ą▓č鹊čĆąŠą╣ ą╝ąĄčéą║ąĖ, čćč鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé? ąÆąŠą┤ąĖč鹥ą╗čī ą┐ąŠą▓č鹊čĆąĮąŠ ą┤ąĄčĆąĮąĄčé ą╗ą░ą┐ą║čā ą║ąĖą║-čüčéą░čĆč鹥čĆą░, ąĮąŠ čüč湥čéčćąĖą║ ą┐čĆąŠčłąĄą╗ ą║čĆčāą│ ąĖ ą┤ą░ąĮąĮčŗąĄ čāąČąĄ ąĮąĄą║ąŠčĆčĆąĄą║čéąĮčŗ, ą░ ą▓čŗ čüąĮąŠą▓ą░ čéčÅąĮąĄč鹥čüčī ą▓čŗčĆąĄąĘą░čéčī čāčüą╗ąŠą▓ąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ąĘą░čēąĖčēą░ąĄčé ąŠčé ąŠčéą┤ą░čćąĖ, čćč鹊ą▒čŗ 菹║ąŠąĮąŠą╝ąĖčéčī ą┐ąŠą╗ ą╝ąĖą║čĆąŠčüąĄą║čāąĮą┤čŗ ąĖ ą┐ą░čĆčā ą▒ą░ą╣čé ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░.
_________________
ąØąĄą╝ąĮąŠą│ąŠ čäą░ą╣ą╗ąŠą▓ ą┐ąŠ ąĘą░ąČąĖą│ą░ąĮąĖčÄ: ążąŻą×ąŚ 2.2 + ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆą░ą▓ą║ąĖ čéą░ą▒ą╗ąĖčå 0.987, ą╝ąŠąĮčéą░ąČą║ą░
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
asel
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŻą×ąŚ ąĮą░ ą▒ą░ąĘąĄ AC-CDI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąĮąŠčÅ 20, 2019 21:34:38 |
|
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čÅąĮą▓ 06, 2015 11:00:44
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 750
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
Flash.#13 ą¤ąŠąĮčÅčéąĮąŠ. čü 500, 600. ą¤ąŠčŹč鹊ą╝čā čÅ ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čÄ ąĮąĄ FFFF, ą░ EA60=500 ąŠą▒ąŠčĆąŠč鹊ą▓. ąÉ FFFF -čŹč鹊 458 ąŠą▒ąŠčĆąŠč鹊ą▓. ąØčā čŹč鹊 čāąČ čüąŠą▓čüąĄą╝ ą╝ą░ą╗ąŠ. ąś ąŠč湥ąĮčī ą▒ąŠą╗čīčłą░čÅ čĆą░ąĘąĮąĖčåą░ ą╝ąĄąČą┤čā 600 ąĖ 458. ąó.ąĄ. ą┐čĆąĖ 580ąŠą▒, čāą│ąŠą╗ čāąČąĄ ą▒čāą┤ąĄčé ą║ą░ą║ ą┐ąŠ 460. ąĀą░ąĘąŠą▒čĆą░ą╗ąĖčüčī. ą¦č鹊ą▒čŗ ą╝ąŠč鹊čĆ ąĘą░ą│ą╗ąŠčģ, ąĖ ąŠčüčéą░ąĮąŠą▓ąĖą╗čüčÅ ą╝ąĄąČą┤čā ą╝ąĄčéą║ą░ą╝ąĖ. ą» ą┤ą░ąČąĄ čéą░ą║ąŠąĄ ąĮąĄ ą╝ąŠą│ ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖčéčī ąöą░ ąĖ ąŠčłąĖą▒ą║ą░ ;ą▓č鹊čĆąŠą╣(ą┐ąŠąĘą┤ąĮąĖą╣) ąĖą╝ą┐čāą╗čīčü ą┤ą░čéčćąĖą║ą░ ;ą┐čĆąĖ ą┐ąĄčĆą▓ąŠą╝ ą┐čĆąŠčģąŠą┤ąĄ čĆą░ąĘčĆąĄčłąĖą╝ ąŠą▒čĆą░ą▒ąŠčéą║čā ą┤ą░čéčćąĖą║ą░2 (ą┐čĆą░ą▓ąĖą╗čīąĮąŠ. ą▓ą║ą╗. ąŠąČąĖą┤ą░ąĮąĖąĄ ą┤ą░čéčćąĖą║ą░2) ori R20, 0b00001000 ;sbiR20/3,ą║ąŠąĮčéčĆąŠą╗čī andi R20, 0b11011111 ;cbiR20/5,ą║ąŠąĮčéčĆąŠą╗čī ret ąÉ R20, 5 ąĘą░č湥ą╝ ą▓čŗą║ą╗čÄčćąĖą╗ąĖ? (ą┤ą░čéčćąĖą║ą░1) ąś ąĘą░č湥ą╝ "ą│ąŠąĮčÅčéčī" ą┐ąŠ ą▓čüąĄą╝čā ą║čĆčāą│čā, ąŠąČąĖą┤ą░čÅ ą┤ą░čéčćąĖą║2? "ret" ąĘą░ą╝ąĄąĮąĖčéčī ąĮą░ "rjmp norm". ąźąŠčéčÅ ąĖ čéą░ą║ ąĖ čéą░ą║ ąĄčüčéčī ąĮčÄą░ąĮčü. ąĢčüą╗ąĖ ą┤ą░čéčćąĖą║2 ą┐čĆąĖą┤ąĄčé ą▓ ą╝ąŠą╝ąĄąĮčé ą┐ąĄčĆąĄą┤ : sbrc R20, 2 ;if bitX,n='1' then do rjmp vtoroi ;ą┐ąĄčĆąĄčģąŠą┤ ąĮą░ ą╝ą░čé2 ą░ ąĮąĄ ą┐ąĄčĆąĄą┤ norm? ąóąŠ ą┐ąŠą╗čāčćąĖą╝ R25 ąĖąĘ ą┐ąŠą╗ąĮąŠą│ąŠ ąŠą▒ąŠčĆąŠčéą░, ą░ ąĮąĄ ąŠčé ą┤ą░čé1 ą┤ąŠ ą┤ą░čé2. ąÜą░ą║ čĆąĄčłąĖčéčī? ą¤čĆąĄą┤ą╗ą░ą│ą░čÄ ą▓ą╝ąĄčüč鹊 "ą▓ą║ą╗ ąŠąČąĖą┤ą░ąĮąĖčÅ ą┤ą░čé2", ą▓ą┐ąĖčüą░čéčī čåąĖą║ą╗ "ąŠąČąĖą┤ą░ąĮąĖčÅ ą┤ą░čé2" (ą║ą░ą║ ą▓ ą▓ąĄčĆčüąĖąĖ 2.0), ąĖ ą▓čŗčģąŠą┤ rjmp norm ąŚą┤ąĄčüčī----- iskra: clr R29 ;ąŠčüą╗ąĄą┐ą╗ąĄąĮąĖąĄ sbrs R20, 3 ;if bitX,n='0' then do sbi PortD,7 ;ą╗ąŠą│"1"ąĮą░ ą▓čŗčģąŠą┤ "flyback" sbrs R20, 3 ;if bitX,n='0' then do sbi PortC,0 ;ą╗ąŠą│"1"ąĮą░ ą▓čŗčģąŠą┤ "ąĖčüą║čĆą░" andi R20, 0b11010011;cbiR20/532,ą║ąŠąĮčéčĆąŠą╗čī ret ą¤ąŠč湥ą╝čā R20, 4 =1? ąĢčēąĄ čģąŠčéąĖą╝ ąĖčüą║čĆčā? sbrs R20, 3 if bitX,n='0' then do ąĘą░č湥ą╝? ąĢčēąĄ ąŠą┤ąĮą░ ą▒ąĄą┤ą░. ąÜą░ą║ ą┐ąŠą▓ąĄą┤ąĄčé čüąĄą▒čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░..? ąØą░ą┐čĆąĖą╝ąĄčĆ čģčģ ąŠą▒ąŠčĆąŠčéčŗ. ąŻą│ąŠą╗-ąĘą░ą┤ąĄčƹȹ║ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ R25=R23. ąś ąĮą░ą┐čĆąĖą╝ąĄčĆ - ąĘą░ą╝ąĄą┤ą╗ąĄąĮąĖąĄ ąĖą╗ąĖ čĆą░ąĘą│ąŠąĮ ą╝ą░čģąŠą▓ąĖą║ą░ ąŠčé ą┤ą░čé1 ą┤ąŠ ą┤ą░čé2, ą┐čĆąĖ ąĮąĄčüčéą░ą▒ąĖą╗čīąĮčŗčģ ąŠą▒ąŠčĆąŠčéą░čģ. ąĪą╗ąŠąČąĮąŠ. ą¤ąŠą║ą░ ą┐ąŠčüčćąĖčéą░ąĄą╝, čćč鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čü čāą│ą╗ąŠą╝. ą¤ąĪ. ą¤čĆąŠčüč鹊 ą▒čŗą╗ąŠ ąĖąĮč鹥čĆąĄčüąĮąŠ čćč鹊 ą▓čŗ čéą░ą╝ ąĮą░ą▓ą░čÅą╗ąĖ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ. ą¦č鹊 ąĖ ą┤ą╗čÅ č湥ą│ąŠ. ąæąŠą╗čīčłąĄ ą┐ąĖčüą░čéčī ą▓ą░ą╝ ąĮąĄ ą▒čāą┤čā. "ąōą╗čāčģąŠą╣ čüąŠ čüą╗ąĄą┐čŗą╝."
ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ čĆą░ąĘ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī asel ą¦čé ąĮąŠčÅ 21, 2019 13:09:19, ą▓čüąĄą│ąŠ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ą╗ąŠčüčī 5 čĆą░ąĘ(ą░).
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
Deepcrasher
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: ążąŻą×ąŚ ąĮą░ ą▒ą░ąĘąĄ AC-CDI ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ąĮąŠčÅ 20, 2019 22:39:44 |
|
| ąĀąŠą┤ąĖą╗čüčÅ |
 |
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¦čé ąĮąŠčÅ 14, 2019 22:11:51
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 11
ą×čéą║čāą┤ą░: ą£ąŠčüą║ą▓ą░
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ą¤čÅčéčī ą║ąŠą┐ąĄąĄą║: ą×čéą╗ąĖčćąĮą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ą╗čÅ čĆąĖčüąŠą▓ą░ąĮąĖčÅ ą▒ą╗ąŠą║-čüčģąĄą╝ (ąĖ ąĄčēčæ ą╝ąĮąŠą│ąŠ č湥ą│ąŠ) - Diagram Designer. ąæąĄčüą┐ą╗ą░čéąĮą░čÅ.
_________________
ąĪą▓ąĖą┤ąĄč鹥ą╗čī ąÆąŠą╗čłąĄą▒ąĮąŠą│ąŠ ą┤čŗą╝ą░
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
|
ąĪčéčĆą░ąĮąĖčåą░ 67 ąĖąĘ 115
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2297 ] |
... , , , , , , ... |
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ |
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: ąĮąĄčé ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ ąĖ ą│ąŠčüčéąĖ: 25 |
|
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ
|

|
|