ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - RSLK ąŠčé TI (Robotic System Learning Kit)
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
ąĪčéčĆą░ąĮąĖčåą░ 6 ąĖąĘ 14
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 265 ]
... , , , , , , ...
ąÉą▓č鹊čĆ
ąĪąŠąŠą▒čēąĄąĮąĖąĄ
uldemir
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit)
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą┤ąĄą║ 23, 2019 08:06:29
ąöčĆčāą│ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
ąĪ BLE čā ą╝ąĄąĮčÅ ą▓čüčæ ąĮąĖą║ą░ą║ ąĮąĄ čüčĆą░čüčéą░ąĄčéčüčÅ. ąØąĄ ą│ąŠą▓ąŠčĆčÅ čāąČ ąŠ čüąĄčéčÅčģ. ąØą░ čŹčéąĖčģ ą▓čŗčģąŠą┤ąĮčŗčģ ąĖ ą╝ąŠą╣ ąĮąŠą▓čŗą╣ čĆąŠą▒ąŠčé, ą┤čāą╝ą░čÄ, ą▓ą┐ą░ą╗ ą▓ GPF. ąŁč鹊 ą▒čŗą╗ąŠ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ ą║ą░ą║ čÅ ą┐ąŠą┐čŗčéą░ą╗čüčÅ ąĖąĘą▒ą░ą▓ąĖčéčīčüčÅ ąŠčé ą┐ąŠč鹥ąĮčåąĖą░ą╗čīąĮąŠą╣ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┐ąŠą╗čāčćąĖčéčī ą┤ąĄą╗ąĄąĮąĖąĄ ąĮą░ 0 ą▓ ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮąŠ-ąĖąĮč鹥ą│čĆą░ą╗čīąĮąŠą╝ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ. ąØąŠ ą▓ čŹč鹊čé čĆą░ąĘ čÅ ąĖčüą║ą░čéčī ąĮąĖč湥ą│ąŠ ąŠčüąŠą▒ąŠ ą╝ąĄąĮčÅčéčī ąĮąĄ čüčéą░ą╗. ąĪąĮą░čćą░ą╗ą░, ą┐ąŠą┐čŗčéą░ą╗čüčÅ ąŠčéą║ą░čéąĖčéčī ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ, ąĘą░č鹥ą╝, ą║ąŠą│ą┤ą░ ąĮąĖč湥ą│ąŠ ąĮąĄ ąĖąĘą╝ąĄąĮąĖą╗ąŠčüčī, ą┐čĆąŠčüč鹊 čāą▓ąĄą╗ąĖčćąĖą╗ čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ čü 0x200 ą┤ąŠ 0x800. ąŻ ą╝ąĄąĮčÅ čāąČąĄ ą▒čŗą╗ąĖ
ą┐ąŠą┤ąŠąĘčĆąĄąĮąĖčÅ ąĮą░ čüč鹥ą║ , ąĮąŠ čÅ čāąČąĄ ą▓čüčæ ą║ąŠąĮčüčéą░ąĮčéąĮąŠąĄ, čćč鹊 ą▒čŗą╗ąŠ ą┐ąĄčĆąĄčéą░čēąĖą╗ ą▓ ą¤ąŚąŻ. ąØčā ą▓ąŠ ą▓čüčÅą║ąŠą╝ čüą╗čāčćą░ąĄ, ą┐ąŠčüą╗ąĄ čāą▓ąĄą╗ąĖč湥ąĮąĖčÅ čüč鹥ą║ą░, ą┐ąŠą║ą░ ą│ą╗čÄą║ąŠą▓ ąĮąĄčé.
ąŁą║ą╗ąĖą┐čü ąĮą░čüčéčāą┐ą░ąĄčé ą┐ąŠ ą▓čüąĄą╝ čäčĆąŠąĮčéą░ą╝. ąÆąŠčé č鹊ą╗čīą║ąŠ ąĮąĄ ą┐ąŠąĮčÅčéąĮąŠ, 32 ą▒ąĖčéąĮčŗą╣ CCS ąŠčéą╝ąĄąĮąĖą╗ąĖ ąĖąĘ-ąĘą░ 菹║ą╗ąĖą┐čüą░ ąĖą╗ąĖ čéą░ą║? ąØąĄ ą┐ąŠą╗čāčćąĖčéčüčÅ ą╗ąĖ čéą░ą║, čćč鹊 ą╝ąĮąĄ ą▓čüčæ ąČąĄ ą┐čĆąĖą┤čæčéčüčÅ ą┐ąŠą║čāą╝ą░čéčī ąĮąŠą▓čŗą╣ ąĮąŠčāčé, ąĮą░ ą║ąŠč鹊čĆčŗą╣ ąĄą│ąŠ ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé ą┐ąŠčüčéą░ą▓ąĖčéčī. ąÉ č鹊 ą▓ čüčéą░čĆčŗą╣ CCS ąĮąĄ ą╝ąŠą│čā ą┐čĆąŠąĖą╝ą┐ąŠčĆčéąĖčĆąŠą▓ą░čéčī čĆą░ą▒ąŠčćąĖą╣ čüč鹊ą╗ ą┤ą╗čÅ RSLK-MAX. ą×ąĮ čéčĆąĄą▒čāąĄčé ąĮąŠą▓čŗą╣ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ, ą║ąŠč鹊čĆčŗą╣ čÅ ąĮą░ čüčéą░čĆčŗą╣ CCS ąĮąĖą║ą░ą║ ą┐ąŠčüčéą░ą▓ąĖčéčī ąĮąĄ ą╝ąŠą│čā.
ąĪ Cypress čÅ ąĖ ą┐čĆąŠą┤ąŠą╗ąČą░čÄ ąĘą░ąĮąĖą╝ą░čéčīčüčÅ. ąĪąĄą╣čćą░čü ąĮą░ą┤ąŠ ą▒čŗ ą▓ąĘčÅčéčīčüčÅ ąĘą░ ąĮąŠą▓ąŠą│ąŠ čĆąŠą▒ąŠčéą░ ą┤ą╗čÅ LineFollower, čćč鹊 čÅ čüąŠą▒čĆą░ą╗ ą▓ ą║ąŠąĮčåąĄ ą╗ąĄčéą░. ąØą░ ą▓čŗčģąŠą┤ąĮčŗčģ ąĘą░ą╗ąĖą╗ č乊čĆą╝čŗ čü ą║ąŠą╗čæčüą░ą╝ąĖ ą┤ą╗čÅ čŹč鹊ą│ąŠ čĆąŠą▒ąŠčéą░ čüąĖą╗ąĖą║ąŠąĮąŠą╝, č湥čĆąĄąĘ ą┐ą░čĆčā ą┤ąĮąĄą╣ ą▒čāą┤čā ą┐čŗčéą░čéčīčüčÅ ąĖčģ ąŠčéčéčāą┤ą░ ą▓čŗą║ąŠą▓čŗčĆąĮčāčéčī. ąóą░ą║ ąČąĄ ą┐ąŠą╗čāčćąĖą╗ č鹊ą╗ą┐čā ąĮąŠą▓čŗčģ ą▒ą░čéą░čĆąĄąĄą║ - ąĮą░ą┤ąŠ ą┐čĆąĖą┤čāą╝ą░čéčī ą║ą░ą║ ąĖčģ ąĘą░ą║čĆąĄą┐ąĖčéčī ąĮą░ čĆąŠą▒ąŠč鹥. ąś, ą║ąŠąĮąĄčćąĮąŠ, ąĮą░ą┤ąŠ ąĮą░čćą░čéčī čĆą░ą▒ąŠčéą░čéčī ąĮą░ą┤ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣, čćč鹊ą▒čŗ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą┐ąŠčģąŠąČąĖą╣ ą¤ąś ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ. ą¤čĆąĖč湥ą╝, ąĄčüą╗ąĖ čÅ čüą┤ąĄą╗ą░ą╗ čéą░čģąŠą╝ąĄčéčĆ ą░ą┐ą┐ą░čĆą░čéąĮąŠ, ą┤ąĄč鹥ą║č鹊čĆ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ - č鹊ąČąĄ ą░ą┐ą┐ą░čĆą░čéąĮąŠ, č鹊 ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ ą┐čĆąĖąŠą┤ą░ č鹊ąČąĄ čģąŠč湥čéčüčÅ čüą┤ąĄą╗ą░čéčī ą░ą┐ą┐ą░čĆą░čéąĮąŠ.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
qwertyman6336
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit)
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą┤ąĄą║ 23, 2019 13:45:07
ąÜą░čĆą╝ą░: -4
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 0
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąÆčé čÅąĮą▓ 07, 2020 15:04:19ąĪąŠąŠą▒čēąĄąĮąĖą╣: 2
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
uldemir
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit)
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą┤ąĄą║ 25, 2019 22:25:28
ąöčĆčāą│ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
ąöą░ ą▓ąŠčé čÅ č鹊ąČąĄ ą┤čāą╝ą░čÄ, ą┐ąŠčĆą░ ąĄą│ąŠ ą╗ąĖą║ą▓ąĖą┤ąĖčĆąŠą▓ą░čéčī ąĖ ąŠą▒ąĮąŠą▓ąĖčéčī ą┐ą░čĆą║ ą║ąŠą╝ą┐čīčÄč鹥čĆąĮąŠą╣ č鹥čģąĮąĖą║ąĖ. ąØčā čÅ ąŠą▒ čŹč鹊ą╝ ą│ąŠą┤ą░ čéčĆąĖ-č湥čéčŗčĆąĄ čāąČąĄ ą┤čāą╝ą░čÄ.
ąĪąĄą│ąŠą┤ąĮčÅ "ą┐ąĄčĆąĄčüą░ą┤ąĖą╗" čüąĄąĮčüąŠčĆ ą╗ąĖąĮąĖąĖ ąĮą░ čéčāą┤ą░, ą║čāą┤ą░ ąĘą░ą┤čāą╝ą░ą╗:
ąØą░ą┐ąĄčćą░čéą░ą╗ ą▓ąŠčé čéą░ą║ąŠą╣ čģąŠą╝čāčéąĖą║. ąØą░ą┤ąŠ ą▒čāą┤ąĄčé ąĖąĘ č湥čĆąĮąŠą╣ (čģą╝, ą║ą░ą║ čŹč鹊čé resin ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ ą┐ąŠ-čĆčāčüčüą║ąĖ? ą╗ą░ą┤ąĮąŠ, ą┐čāčüčéčī ą▒čāą┤ąĄčé -) ą│ą╝ą░ąĘąĖ (čģąŠčéčī ąĖ ąĮąĄ ą░čĆą┤čĆąĖčéčüą║ąŠą╣) ąĮą░ą┐ąĄčćą░čéą░čéčī. ą¤čĆą░ą▓ą┤ą░ č湥čĆąĮą░čÅ čā ą╝ąĄąĮčÅ ąŠą▒čŗčćąĮą░čÅ, ą░ ą▓ąŠčé čŹčéą░ čüąĄčĆą░čÅ čüčćąĖčéą░ąĄčéčüčÅ tough (ABS like). ą» čéą░ą║ ą┐ąŠąĮčÅą╗, čćč鹊 ąŠąĮą░ čāą┐čĆčāą│ą░čÅ. ąØčā ą┐ąŠčüą╝ąŠčéčĆąĖą╝. ąĮą░ą┤ąŠąĄčüčé čü čŹč鹊ą╣ ą▓ąŠąĘąĖčéčīčüčÅ - ąĮą░ą╗čīčÄ, ąĮą░ą║ąŠąĮąĄčå, č湥čĆąĮčāčÄ ą▓ ą┐čĆąĖąĮč鹥čĆ. ąŚą░č鹊 č鹥ą┐ąĄčĆčī, čüąĄąĮčüąŠčĆčŗ ąĮą░čģąŠą┤čÅčéčüčÅ ąĮą░ čĆą░čüčüč鹊čÅąĮąĖąĖ 3-4-5 ą╝ą╝ ąŠčé ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéąĖ. ą¤ąŠč湥ą╝čā čĆą░ąĘą▒čĆąŠčü? ąÉ ą┐ąŠč鹊ą╝čā čćč鹊 čłą░čĆąĖą║ čŹč鹊čé ą▓ ą│ąĮąĄąĘą┤ąĄ čŹč鹊ą╝ č鹊ąČąĄ "ą╗čÄčäčéčāąĄčé" ą│ą┤ąĄ-č鹊 čü ą╝ąĖą╗ą╗ąĖą╝ąĄčéčĆ. ąØčā, ą┐ąŠčüą╝ąŠčéčĆąĖą╝, čćč鹊 ą┐ąŠą║ą░ąČčāčé ąĘą░ąĄąĘą┤čŗ ą┐ąŠ čéčĆą░čüčüą░ą╝. ą¤ąŠ ą╝ąŠąĄą╣ čéčĆą░čüčüąĄ čĆąŠą▒ąŠčé ą┐ąŠčłąĄą╗ ą┤ą░ąČąĄ ą▒ąĄąĘ ą┐ąĄčĆąĄąĮą░čüčéčĆąŠą╣ą║ąĖ. čüąĄą╣čćą░čü čüčéą░ą▒ąĖą╗čīąĮąŠ 27.9 čüąĄą║čāąĮą┤čŗ.
ąØąĄą╝ąĮąŠą│ąŠ ą┐ąŠą┐čŗčéą░ą╗čüčÅ ą┐ąŠą▒ąŠčĆąŠčéčīčüčÅ čü ą┤ąĄą╗ąĄąĮąĖąĄą╝ ąĮą░ 0. ąĪąĖčéčāą░čåąĖčÅ čéą░ą║ą░čÅ, čćč鹊 ą┤ą╗čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┐ąĄčĆąĖąŠą┤ą░ ą▓čĆą░čēąĄąĮąĖčÅ ą║ąŠą╗ąĄčü, ąĖąĘą╝ąĄčĆčÅąĄčéčüčÅ ąĖąĮč鹥čĆą▓ą░ą╗ ą╝ąĄąČą┤čā ąĖą╝ą┐čāą╗čīčüą░ą╝ąĖ čéą░čģąŠą┤ą░čéčćąĖą║ą░. ąöą╗čÅ čŹč鹊ą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čĆąĄą│ąĖčüčéčĆ ąĘą░čģą▓ą░čéą░ 16 ą▒ąĖčéąĮąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░, ą║ąŠč鹊čĆčŗą╣ ą║čĆčāčéąĖčéčüčÅ ą┐ąŠ ą║čĆčāą│čā. ąó.ąĄ. ąĄčüą╗ąĖ ą┐ąĄčĆą▓ąŠąĄ ąĘą░čģą▓ą░č湥ąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▒čŗą╗ąŠ 0x6000, ą░ ą▓č鹊čĆąŠąĄ 0xE000, č鹊 ą┐ąĄčĆąĖąŠą┤ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ 0x8000. ąĘą░č鹥ą╝ čüą╗ąĄą┤čāčÄčēąĄąĄ 0x7000 - č鹊 ą┐ąŠ 16 ą▒ąĖčéąĮąŠą╣ ą▒ąĄąĘ ąĘąĮą░ą║ąŠą▓ąŠą╣ ą░čĆąĖčäą╝ąĄčéąĖą║ąĄ ą▓čüčæ-čĆą░ą▓ąĮąŠ ą▒čāą┤ąĄčé 0x9000 (7000-E000=FFFF9000, ąĄčüą╗ąĖ ą▓ 32 ą▒ąĖčéą░čģ). ąó.ąĄ. ą▓čüčæ ą║čĆą░čüąĖą▓ąŠ. ąĮąŠ ą┤ąŠ č鹥čģ ą┐ąŠčĆ ą┐ąŠą║ą░ ąĖąĘą╝ąĄčĆąĄąĮąĮčŗą╣ ąĖąĮč鹥čĆą▓ą░ą╗ ąĮąĄ čüčéą░ąĮąŠą▓ąĖčéčüčÅ čĆą░ą▓ąĮčŗą╝ 65536 - ą┐ąŠč鹊ą╝čā ą║ą░ą║ čĆą░ąĘąĮąŠčüčéčī ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ čĆą░ą▓ąĮąŠą╣ 0. ąś č鹊ą│ą┤ą░ ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ RPM ą┐čĆąĖčģąŠą┤ąĖčéčüčÅ ą┤ąĄą╗ąĖčéčī ąĮą░ čŹč鹊čé 0. ąś čéčāčé čÅ ą┐ąŠą┤čāą╝ą░ą╗, čéą░ą║ ą║ą░ą║ čÅ ą║ąŠąĮčéčĆąŠą╗ąĖčĆčāčÄ čćąĖčüą╗ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖą╣ čéą░ą╣ą╝ąĄčĆą░ (ąĄčüą╗ąĖ ą╝ąĄąČą┤čā ą┤ą▓čāą╝čÅ čüąŠą▒čŗčéąĖčÅą╝ąĖ ąĘą░čģą▓ą░čéą░ čéą░ą╣ą╝ąĄčĆ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĖą╗čüčÅ ą▒ąŠą╗ąĄąĄ ąŠą┤ąĮąŠą│ąŠ čĆą░ąĘą░, č鹊 čÅ čüčćąĖčéą░čÄ, čćč鹊 ą╝čŗ čüč鹊ąĖą╝ ąĮą░ ą╝ąĄčüč鹥), č鹊 ą┐ąŠč湥ą╝čā ą▒čŗ čüčćąĖčéą░čéčī ąĮąĄ ą▓ 16 ą▒ąĖčéąĮąŠą╣ ą░čĆąĖčäą╝ąĄčéąĖą║ąĄ, ą░ ą▓ 17 ą▒ąĖčéąĮąŠą╣. ąæčŗą╗ąĖ čéčĆąĖ ą┐ąŠą┐čŗčéą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą▓ąŠą┤ąĖą╗ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą║ ą┐ąŠčćčéąĖ ą┐ąŠą╗ąĮąŠą╣ ąĮąĄčĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ, ąĮąŠ ą║ąŠą│ą┤ą░ čÅ čĆą░ąĘąŠą▒čĆą░ą╗čüčÅ čüąŠ ą▓čüąĄą╝ąĖ ąŠčłąĖą▒ą║ą░ą╝ąĖ - čŹčéą░ čłčéčāą║ą░ ąĘą░čĆą░ą▒ąŠčéą░ą╗ą░.
ąÆąŠčé čŹč鹊čé ą║ąŠą┤ ąĖąĘ ą╗ą░ą▒ąŠčĆą░č鹊čĆąĮčŗčģ čĆą░ą▒ąŠčé (ąŠąĮ čéą░ą╝ ą▒čŗą╗ čāąČąĄ ą│ąŠč鹊ą▓čŗą╣)
ąÜąŠą┤:
void tachometerRightInt(uint16_t currenttime){
ąÉ čÅ ą┤ąŠą▒ą░ą▓ąĖą╗ ąĄčēąĄ ąŠą┤ąĖąĮ ą▒ąĖčé:
ąÜąŠą┤:
void tachometerRightInt(uint16_t currenttime){
čé.ąĄ. čā ą╝ąĄąĮčÅ ą▓čüąĄą│ą┤ą░ SecondRightTime ą▒ąŠą╗čīčłąĄ č湥ą╝ FirstRightTime.
ąØčā ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ čüąĖčéčāą░čåąĖąĖ, ą║ąŠą│ą┤ą░ čéą░ą╣ą╝ąĄčĆ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĖą╗čüčÅ ą▒ąŠą╗čīčłąĄ ąŠą┤ąĮąŠą│ąŠ čĆą░ąĘą░, ąĮąŠ č鹊ą│ą┤ą░ čÅ ąĖ ąĖąĮč鹥čĆą▓ą░ą╗ ą▓ąŠąŠą▒čēąĄ ąĮąĄ čüčćąĖčéą░čÄ, ą░ ą▓ąŠąĘą▓čĆą░čēą░čÄ 65535 ąĖ čüčéą░čéčāčü STOPPED. ąÉ, ąĖ ą┤ą╗čÅ čŹč鹊ą│ąŠ čäąĖąĮčéą░, ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ąĖąĘ 16 ą▒ąĖčéąĮčŗčģ čüą┤ąĄą╗ą░ą╗ 32 ą▒ąĖčéąĮčŗą╝ąĖ (ąŠ, čÅ č鹥ą┐ąĄčĆčī ą╝ąŠą│čā čéą░ą╝ ą▒ąŠą╗čīčłąĄąĄ čćąĖčüą╗ąŠ ą▓ąŠąĘą▓čĆą░čēą░čéčī ą▓ą╝ąĄčüč鹊 65535! čüąĄą╣čćą░čü ą┐ąŠą┐čĆąŠą▒čāąĄą╝) .
ąØą░ą┤čāą╝ą░ą╗, ąĄčēąĄ čĆą░ąĘąŠą║ ą┐ąŠą│čāą│ą╗ąĖčéčī, ą╝ąŠąČąĄčé ą│ą┤ąĄ ą▓ ąĖąĮč鹥čĆąĮąĄč鹥 ąĄčüčéčī čĆąĄčłąĄąĮąĖąĄ čŹč鹊ą│ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąĢčüč鹥čüčéą▓ąĄąĮąĮąŠ, ąĮąĖč湥ą│ąŠ ąĮąĄ ąĮą░čłąĄą╗, ąĘą░č鹊 ąĮą░čłąĄą╗ ą║ą░ą║čāčÄ-č鹊 ą┐čĆąĄąĘąĄąĮčéą░čåąĖčÄ ąŠčé
ąöą░ąĮąĖ菹╗ą░ ąÆą░ą╗ą▓ą░ąĮąŠ ąĖ čüčüčŗą╗ą║čā ą│ą┤ąĄ ą┤ą╗čÅ čŹč鹊ą│ąŠ čĆąŠą▒ąŠčéą░ ą┐čĆąĖą▓ąĄą┤ąĄąĮą░ ą░ąĮą┤čĆąŠąĖą┤ąĮą░čÅ ą░ą┐ą┐ą╗ąĖą║ą░čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ čāą┐čĆą░ą▓ą╗čÅąĄčé čĆąŠą▒ąŠč鹊ą╝ č湥čĆąĄąĘ BLE. ąÆ čĆąŠą▒ąŠčé ąĮą░ą┤ąŠ ąĘą░ą│čĆčāąĘąĖčéčī ą┐čĆąŠąĄą║čé, ą║ąŠč鹊čĆčŗą╣ ąĄčüčéčī ą▓ ą╗ą░ą▒ąŠčĆą░č鹊čĆąĮąŠą╝ ą▓ąŠčĆą║ą┐ą╗ąĄą╣čüąĄ ą┐ąŠą┤ ąĮą░ąĘą▓ą░ąĮąĖąĄą╝ ASEE. ąöčāą╝ą░ą╗, ą░ ąĮąĄ ąĘą░ą│čĆčāąĘąĖčéčī ą╗ąĖ ą▓ čĆąŠą▒ąŠčé ąĄčæ ąĮą░ ą┐ąŠą▒ą░ą╗ąŠą▓ą░čéčīčüčÅ? ąōą╗ą░ą▓ąĮąŠąĄ ąĮąĄ ąĘą░ą▒čŗčéčī čüą╗ąĖčéčī č鹥ą║čāčēąĖą╣ ąĖą╝ąĖą┤ąČ ą┐ą░ą╝čÅčéąĖ, ą░ č鹊, ą┐čŗčéą░čÅčüčī ą┤ąĄą╗ą░čéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ ą╗ą░ą▒čŗ - čüčéčæčĆ ą▓čüčÄ ą┐ą░ą╝čÅčéčī ą▓ą╝ąĄčüč鹥 čü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ. ąśą╗ąĖ ąĮą░ą┤ąŠ ąĖčģ ą│ą┤ąĄ-č鹊 ąĘą░ą┐ąĖčüą░čéčī. ąØąŠ ą┤ą╗čÅ ąĮą░čćą░ą╗ą░ ą┐ąŠą┐čŗčéą░ą╗čüčÅ ąĘą░ą╗ąĖčéčī ą┐čĆąŠą│čĆą░ą╝ą╝čā ą▓ ą┐ą╗ą░ąĮčłąĄčé. ąĀą░ąĘčāą╝ąĄąĄčéčüčÅ, ąĮąĖč湥ą│ąŠ ąĮąĄ ą▓čŗčłą╗ąŠ. ąĪą║ąŠą┐ąĖčĆąŠą▓ą░ą╗ *.apk ąĮą░ ą┐ą╗ą░ąĮčłąĄčé, čĆą░ąĘčĆąĄčłąĖą╗ čāčüčéą░ąĮąŠą▓ą║čā "ą╗ąĄą▓čŗčģ" ą░ą┐ą┐ą╗ąĖą║ą░čåąĖą╣, ąĮą░ąČą░ą╗ - čāčüčéą░ąĮąŠą▓ąĖčéčī... ąŠąĮąŠ č湥čĆąĄąĘ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą▓čĆąĄą╝čÅ ą▓čŗą┤ą░ą╗ąŠ, čćč鹊 installation failed. ąÆąŠąŠą▒čēąĄ-č鹊 ą┤ą╗čÅ čŹč鹊ą╣ apk ąĄčüčéčī ąĖčüčģąŠą┤ąĮąĖą║ąĖ ą┐ąŠą┤ android studio, ąĮąŠ čÅ ą▓ ąĮąĖčģ ą║ą░ą║ čüą▓ąĖąĮčīčÅ ą▓ ą░ą┐ąĄą╗čīčüąĖąĮą░čģ.
ąś ą┐ąŠą┤čāą╝ą░ą╗ąŠčüčī ą╝ąĮąĄ, čćč鹊 ąĮą░ą┤ąŠ ą▒čŗ ą┐ąŠą┐čŗčéą░čéčīčüčÅ ąĘą░ą┐ąŠą╗ąĮąĖčéčī čŹč鹊čé ą┐čĆąŠą▒ąĄą╗. ąØą░čćą░ą╗ čĆčŗčéčī ąĖąĮč鹥čĆąĮąĄčé ąĖ ąĮą░čĆčŗą╗
processing . ąĪąĮą░čćą░ą╗ą░ ą┐ąŠą┤čāą╝ą░ą╗, čćč鹊 ą┐ąŠčģąŠąČąĄ ąĮą░ ą░čĆą┤čāąĖąĮčā. ą×ą║ą░ąĘą░ą╗ąŠčüčī - ąĮą░ąŠą▒ąŠčĆąŠčé! ąŁč鹊 ą░čĆą┤čāąĖąĮą░ ą┐ąŠčģąŠąČą░ ąĮą░ processing, čéą░ą║ ą║ą░ą║ čüą┤ąĄą╗ą░ąĮą░ ąĮą░ ąĄą│ąŠ ąŠčüąĮąŠą▓ąĄ. ąÆč湥čĆą░ ą▓ąĄčüčī ą┤ąĄąĮčī ąĘą░ąĮąĖą╝ą░ą╗čüčÅ "ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĄą╣". ąÆąŠą▒čēąĄčé, ą┐čĆąŠčåąĄčüčüąĖąĮą│ ąĖąĮčüčéą░ą╗ąĖčĆąŠą▓ą░čéčī ąĮąĄ ąĮčāąČąĮąŠ - čĆą░čüą┐ą░ą║ąŠą▓ą░ą╗ ą║čāą┤ą░-ąĮąĖą▒čāą┤čī ąĖ ą┐čĆąŠčüč鹊 ąĘą░ą┐čāčüčéąĖą╗ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ čäą░ą╣ą╗. ąØąŠ ą┤ą╗čÅ č鹊ą│ąŠ čćč鹊ą▒čŗ ą┤ąĄą╗ą░čéčī ą░ą┐ą┐ą╗ąĖą║ą░čåąĖąĖ ąĮą░ ą░ąĮą┤čĆąŠąĖą┤, ąĮą░ą┤ąŠ ą┐ąŠčüčéą░ą▓ąĖčéčī čĆą░ąĘąĮčŗąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ąĖ USB ą┤čĆą░ą╣ą▓ąĄčĆą░, čćč鹊ą▒čŗ čā ą┐ą╗ą░ąĮčłąĄčéą░ ą▒čŗą╗ ą┤ąŠčüčéčāą┐ąĄąĮ USB-debug. ąĪ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╝ ą┐čĆąĖčłą╗ąŠčüčī ą┐ąŠą▓ąŠąĘąĖčéčīčüčÅ, ąĮąŠ čüąŠ ą▓č鹊čĆąŠą╣ ą┐ąŠą┐čŗčéą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆ ą┐ąŠčüčéą░ą▓ąĖčéčī ą▓čüčæ ąČąĄ čāą┤ą░ą╗ąŠčüčī. ąóąĄą┐ąĄčĆčī ą┐ąŠčćąĖčéčŗą▓ą░čÄ
ą║ąĮąĖąČą║čā ąĖ ą┐čŗčéą░čÄčüčī ą┐ąŠ ąĮąĄą╣ ą┤ąĄą╗ą░čéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą╝ąĄčĆčŗ. ąĀąĖčüąŠą▓ą░čéčī ą║čĆčāą│ąĖ ąĖ ą║ą▓ą░ą┤čĆą░čéčŗ ąĮą░ 菹║čĆą░ąĮąĄ čāąČąĄ ąĮą░čāčćąĖą╗čüčÅ. ąś ą┤ą░ąČąĄ ą┤ą▓ąĖą│ą░čéčī ąĖ ą┐ąĄčĆąĄą║čĆą░čłąĖą▓ą░čéčī ąĖčģ. ąØą░ą┤ąĄčÄčüčī, ą║ąŠą│ą┤ą░ ą┤ąŠą╣ą┤čā ą┤ąŠ čüąĄą┤čīą╝ąŠą╣ ą│ą╗ą░ą▓čŗ ą┐čĆąŠ BT čüą▓čÅąĘčī čÅ ąĮąĄ čĆą░ąĘąŠčćą░čĆčāčÄčüčī. ąś ąĄčēąĄ ą┤ąŠ čŹč鹊ą│ąŠ ąĮą░ą╣ą┤čā, ą║ą░ą║ ą╝ąŠąČąĮąŠ čüą┤ąĄą╗ą░čéčī čāą┤ąŠą▒ąĮčŗą╣ ą▓ą▓ąŠą┤ ąĘąĮą░č湥ąĮąĖą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓.
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ after 5 minutes: p.s.
ąÉčĆą┤čĆąĖčéčüą║ą░čÅ ą│ą╝ą░ąĘčī , ą┤ą╗čÅ č鹥čģ ą║č鹊 ąĮąĄ ąĘąĮą░ąĄčé ąĖą╗ąĖ čāąČąĄ ąĮąĄ ą┐ąŠą╝ąĮąĖčé - ąĪčéą░ąĮąĖčüą╗ą░ą▓ ąøąĄą╝. ąŚą▓čæąĘą┤ąĮčŗąĄ ą┤ąĮąĄą▓ąĮąĖą║ąĖ ąÖąŠąĮą░ ąóąĖčģąŠą│ąŠ. ąóą░ą╝ ąĖąĘ ąĮąĄčæ ą▓čüčæ ą┤ąĄą╗ą░ą╗ąĖ, ąĮą░čćąĖąĮą░čÅ ąŠčé ąŠą┐ąĄčĆąĮąŠą│ąŠ č鹥ą░čéčĆą░, čĆą░ąĘčĆčāčłąĄąĮąĮąŠą│ąŠ ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐ą░ą┤ąĄąĮąĖčÅ ą╝ąĄč鹥ąŠčĆąĖčéą░, ą┤ąŠ... ą▓ą┐čĆąŠč湥ą╝, ą║č鹊 ąĮąĄ čćąĖčéą░ą╗ , ą┐ąŠčćąĖčéą░ą╣č鹥 čüą░ą╝ąĖ. ąĪ č鹊čćą║ąĖ ąĘčĆąĄąĮąĖčÅ čüąŠą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ č湥ą╗ąŠą▓ąĄą║ą░, čÅą▓ąĮąŠ ą║ą░ą║ąŠą╣-č鹊 čĆą░čüčģąŠą┤ąĮąĖą║ ą┤ą╗čÅ 3D ą┐ąĄčćą░čéąĖ. :))
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
Ser60
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit)
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą┤ąĄą║ 26, 2019 22:38:36
ąöčĆčāą│ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 74
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 607
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą┤ąĄą║ 24, 2008 09:58:58ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3715
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 3
ą¤ąŠčģąŠąČąĄ, ąÆčŗ čĆąĄčłąĖą╗ąĖ čüčĆą░ąĘčā 2 ą┐čĆąŠą▒ą╗ąĄą╝čŗ ą╝ą░čģąŠą╝. ąØą░čüčćčæčé ASEE - čŹč鹊 ą║ą░ą║ čĆą░ąĘ ą│ą┤ąĄ čÅ čü ąÆą░ą╗čīą▓ą░ąĮąŠ ą┐ąŠąĘąĮą░ą║ąŠą╝ąĖą╗čüčÅ, ąŠą┤ąĮą░ą║ąŠ ąĮą░ čŹč鹊ą╣ ąĄą│ąŠ ą┐čĆąĄąĘąĄąĮčéą░čåąĖąĖ čÅ ąĮąĄ ą▒čŗą╗. ąźąŠčéčÅ, ą┐čĆąŠą▓ąŠą┤čÅčéčüčÅ čŹčéąĖ ą║ąŠąĮč乥čĆąĄąĮčåąĖąĖ ą║ą░ąČą┤čŗą╣ ą│ąŠą┤, ą╝ąŠąČąĄčé čŹčéą░ ąĖ ąĮąĄ čéą░. ąØąĄ ąĘąĮą░čÄ ą┐ąŠąĄą┤čā-ą╗ąĖ ąĮą░ ąĮąĖčģ ąĄčēčæ. ą×ą┤ąĮą░ čĆąĄą│ąĖčüčéčĆą░čåąĖčÅ ą┐ąŠčĆčÅą┤ą║ą░ 1000 čüč鹊ąĖą╗ą░, ąÆ č鹊čé čĆą░ąĘ ąóąś ą▒čŗą╗ ą░ą║čéąĖą▓ąĮąŠ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮ, ąĮą░ čüą╗ąĄą┤. ą│ąŠą┤ čāąČąĄ ST. ąÉ ą┐ąŠč湥ą╝čā čĆąĄčłąĖą╗ąĖ ąĮą░ Processing ą┐ąĖčüą░čéčī, ą░ ąĮąĄ ąĮą░ Java? ąźąŠčéčÅ, ą┤ą╗čÅ Androida čüąĄą╣čćą░čü ą▒ąŠą╗ąĄąĄ ą░ą║čéčāą░ą╗ąĄąĮ Kotlin, ą▓čĆąŠą┤ąĄ ą┐ą╗ą░ąĮąĖčĆčāčÄčé ą▓čüčÄ čĆą░ąĘčĆą░ą▒ąŠčéą║čā ą┐ąŠą┤ ąÉąĮą┤čĆąŠąĖą┤ ąĮą░ ąĮąĄą│ąŠ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ čü Java.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
ą×čĆą│ą░ąĮąĖąĘą░čåąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąĮą░ą┤ąĄąČąĮčŗčģ ą╗ąĖčéąĖąĄą▓čŗčģ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓ EVE ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ ą░ąĘąĖą░čéčüą║ąŠą│ąŠ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░
ąÜą░č湥čüčéą▓ąĄąĮąĮąŠąĄ ąĖ ą▒ąĄąĘąŠą┐ą░čüąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, čĆą░ą▒ąŠčéą░čÄčēąĄąĄ ąŠčé ą░ą║ą║čāą╝čāą╗čÅč鹊čĆą░, ą┤ąŠą╗ąČąĮąŠ čāčćąĖčéčŗą▓ą░čéčī ąĄą│ąŠ čäąĖąĘąĖč湥čüą║ąĖąĄ ąĖ čģąĖą╝ąĖč湥čüą║ąĖąĄ čüą▓ąŠą╣čüčéą▓ą░, ą┐čĆąŠčäąĖą╗ąĖ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░, ąĖčģ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ą┐ąŠą┤ ą▓ą╗ąĖčÅąĮąĖąĄą╝ čĆą░ąĘą╗ąĖčćąĮčŗčģ čāčüą╗ąŠą▓ąĖą╣, čéą░ą║ąĖčģ ą║ą░ą║ č鹥ą╝ą┐ąĄčĆą░čéčāčĆą░ ąĖ č鹊ą║ ąĮą░ą│čĆčāąĘą║ąĖ. ą£čŗ čĆą░čüčüą║ą░ąČąĄą╝ ąŠ ą╗ąĖčéąĖą╣-ąĖąŠąĮąĮčŗčģ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąĮčŗčģ ą▒ą░čéą░čĆąĄčÅčģ EVE ąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čĆąĄčłąĄąĮąĖčÅčģ ąŠčé čĆą░ąĘą╗ąĖčćąĮčŗčģ ą║ąĖčéą░ą╣čüą║ąĖčģ ą║ąŠą╝ą┐ą░ąĮąĖą╣, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗčģ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠč鹊ą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čŹčéąĖčģ ąÉąÜąæ. ą¤čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ą▓ čüčéą░čéčīąĄ ą║ąĖčéą░ą╣čüą║ąĖąĄ ą░ąĮą░ą╗ąŠą│ąĖ ą┐ąŠą╝ąŠą│čāčé ąĘą░ą╝ąĄąĮąĖčéčī ą┐čĆąŠą┤čāą║čåąĖčÄ ąĘą░ą┐ą░ą┤ąĮčŗčģ ą▒čĆąĄąĮą┤ąŠą▓ čü ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĄą╣ čåąĄąĮčŗ ą▒ąĄąĘ ą┐ąŠč鹥čĆąĖ ą║ą░č湥čüčéą▓ą░.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
uldemir
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit)
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü ą┤ąĄą║ 29, 2019 23:16:15
ąöčĆčāą│ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
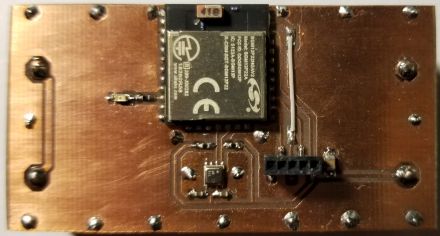
ąŚą░ąĖąĮč鹥čĆąĄčüąŠą▓ą░ą╗čüčÅ PSoC6. ąÜą░čĆčéąĖąĮą║ą░ ąĖąĮč鹥čĆąĄčüąĮą░čÅ - ą┤ą▓ą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą▓ ąŠą┤ąĮąŠą╝ ą║ąŠčĆą┐čāčüąĄ?! ą¤čĆą░ą▓ą┤ą░, ąĮąĄ ą┐ąŠąĮčÅą╗ ąĖą╗ąĖ ąĮąĄ ąĘą░ą╝ąĄčéąĖą╗ ąĖąĘ-ąĘą░ ą▒ąĄą│ą╗ąŠą│ąŠ ą┐čĆąŠčüą╝ąŠčéčĆą░, UDP ą▓ ąĮąĖčģ ąĮąĄčé? ąØčā, čćč鹊ą▒čŗ čāą│ą╗čāą▒ąĖčéčīčüčÅ čüą╗ąĄą│ą║ą░, ą▒čĆąŠčüąĖą╗ ą▓ ą║ąŠčƹʹĖąĮą║čā Cy8Cproto-062 ą┐ą╗ą░čéą║čā - ą┐ąŠčüą╝ąŠčéčĆąĖą╝ čćč鹊 čéą░ą║ąŠąĄ. ąóą░ą╝ ąĄčēąĄ ą║ą░ą║ąŠą╣-č鹊 ą╝ąĖą║čĆąŠą╝ąŠą┤čāą╗čī ąĮą░ ą▒ąŠčĆčéčā BLE ąĖ WiFi čĆą░ąĘąŠą╝? ąØąĄ ąĘąĮą░čÄ, čüąĄą╣čćą░čü ąĘą░ą║ą░ąĘą░čéčī ąĖą╗ąĖ ą┐ąŠčüą╗ąĄ ąØąō. ąÆčüčæ-čĆą░ą▓ąĮąŠ ą┐čĆąĖą┤čæčé č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ ąØąō. ąÆ ąŠą┐ąĖčüą░ąĮąĖąĖ čāą┐ąŠą╝ąĖąĮą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą£ąŠą┤čāčü.
ąóą░ą╝ ą▓ ą║ąŠčƹʹĖąĮą║ąĄ ąĮą░ą║ąĖą┤ą░ą╗ ąĮąĄą╝ąĮąŠą│ąŠ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░ čĆą░ąĘąĮąŠą│ąŠ. ąÜąŠąĮčüčéą░čéąĖčĆąŠą▓ą░ą╗, čćč鹊 ą┤ąŠą╝ą░ ąĮąĄčé ąĮąĖ ąŠą┤ąĮąŠą│ąŠ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą│ąŠ ą╝ąĄčéčćąĖą║ą░ ą£3. ąóąŠ čćč鹊 čā ąĮą░čü ą▓ čüčéčĆąŠąĖč鹥ą╗čīąĮąŠą╝ ą┐čĆąŠą┤ą░čÄčé - čéą░ą║ąŠąĄ ą▒ą░čĆą░čģą╗ąŠ. ąØčā ąĖ ąĘą░ čĆą░ąĘ ą▒čĆąŠčüąĖą╗ ą╝ą░ą╗ąĄąĮčīą║ąĖą╣ ą║ąŠąĮąĮąĄą║č鹊čĆ - ąĮą░ą┤ąĄčÄčüčī, ą┐ąŠą┤ąŠą╣ą┤čæčé ą║ą░ą║ ąŠčéą▓ąĄčéąĮą░čÅ čćą░čüčéčī ą║ LiFe ą░ą║ą║čāą╝čāą╗čÅč鹊čĆą░ą╝, čćč鹊 čÅ ąĘą░ą║čāą┐ąĖą╗. ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ą╗ą░ąĮąĖčĆčāčÄ ą┐ąŠčüčéą░ą▓ąĖčéčī ąĮą░ čĆąŠą▒ąŠčéą░ ą┤ą╗čÅ LineFollower. ąÜąŠą╗čæčüą░ ą┤ą╗čÅ čŹč鹊ą│ąŠ čĆąŠą▒ąŠčéą░ ąŠčéą╗ąĖą╗ ąĖ ą┤ą░ąČąĄ ą▒ą╗ą░ą│ąŠą┐ąŠą╗čāčćąĮąŠ ą▓čŗčéą░čēąĖą╗ ąĖąĘ č乊čĆą╝čŗ. ąÆčĆąŠą┤ąĄ, čāąČąĄ ąĮą░ą╗ąŠą▓čćąĖą╗čüčÅ, čü ą║ą░ą║ąŠą╣ čüč鹊čĆąŠąĮčŗ ąĮą░ą┤ą░ą▓ąĖčéčī, čćč鹊ą▒čŗ ąŠč鹊賹Ąą╗ ąŠčé čüč鹥ąĮąŠą║ ąĖ ą▓ ą║ą░ą║čāčÄ čüč鹊čĆąŠąĮčā ąŠąĮ ą╗ąĄą│č湥 ą▓čŗą┤ą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąĖąĘ č乊čĆą╝čŗ.
ąöčāą╝ą░ą╗-ą┤čāą╝ą░ą╗, ą┐ąŠč湥ą╝čā "čéčĆčæčģą║ąŠąĮčéčāčĆąĮą░čÅ" čüąĖčüč鹥ą╝ą░ čĆą░ą▒ąŠčéą░ąĄčé ą╗čāčćčłąĄ č湥ą╝ ąŠą▒čēą░čÅ ąŠą┤ąĮąŠą║ąŠąĮčéčāčĆąĮą░čÅ čüąĖčüč鹥ą╝ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąÆčĆąŠą┤ąĄ, ą▓čüčæ ą┐ąŠčćčéąĖ ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠ - ąĄčüčéčī ąŠčłąĖą▒ą║ą░, ąŠąĮą░ čāčüąĖą╗ąĖą▓ą░ąĄčéčüčÅ ąĖ ą┐ąŠą┤ą░čæčéčüčÅ ąĮą░ ąĖčüą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░. ąØąŠ ą┤ąĄą╗ąŠ ą▓ č鹊ą╝, ą┐ąŠ ą╝ąŠąĄą╝čā, čćč鹊 ą▓čĆąĄą╝čÅ čĆąĄą░ą║čåąĖąĖ ą▓čüąĄą│ąŠ čĆąŠą▒ąŠčéą░, ą│ąŠčĆą░ąĘą┤ąŠ ą▓čŗčłąĄ č湥ą╝ ą▓čĆąĄą╝čÅ čĆąĄą░ą║čåąĖąĖ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ. ąś čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī čéą░ą║ąŠąĄ ąČąĄ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄąĄ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖąĄ ą▓ ąŠą▒čēąĄą╣ čüąĖčüč鹥ą╝ąĄ - ąĮą░ą┤ąŠ ąŠč湥ąĮčī ą┐ąŠą▓čŗčüąĖčéčī ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé čāčüąĖą╗ąĄąĮąĖčÅ čāčüąĖą╗ąĖč鹥ą╗čÅ ąŠčłąĖą▒ą║ąĖ, čćč鹊 ą┐čĆąĖ ą▒ąŠą╗čīčłąŠą╝ ąĘą░ą┐ą░ąĘą┤čŗą▓ą░ąĮąĖąĖ ą▓čŗąĘčŗą▓ą░ąĄčé ąĮąĄčüčéą░ą▒ąĖą╗čīąĮąŠčüčéčī čüąĖčüč鹥ą╝čŗ (ą▓ąŠąĘą▒čāąČą┤ąĄąĮąĖąĄ). ąÉ ą▓ čéčĆčæčģą║ąŠąĮčéčāčĆąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ, čŹčéąĖ čŹčéą░ą┐čŗ čāčüąĖą╗ąĄąĮąĖčÅ čĆą░ąĘą┤ąĄą╗ąĄąĮčŗ čéą░ą║, čćč鹊 čüčāą╝ą╝ą░čĆąĮčŗą╣ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé (ą╝ąĮąĄ ą║ą░ąČąĄčéčüčÅ, ąŠąĮ čÅą▓ą╗čÅąĄčéčüčÅ ą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖąĄą╝ čŹčéąĖčģ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą▓) ą┤ąŠčüčéą░č鹊čćąĮąŠ ą▓čŗčüąŠą║, ąĮąŠ ą▓ č鹊ąČąĄ ą▓čĆąĄą╝čÅ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░ ąŠąĮ ą┤ąŠčüčéą░č鹊čćąĮąŠ ąĮąĖąĘąŠą║, čćč鹊ą▒čŗ ą┐čĆąĖ č鹊ą╝ ą▓čĆąĄą╝ąĄąĮąĖ čĆąĄą░ą║čåąĖąĖ ą║ą░čüą║ą░ą┤ą░ ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓čüčæ ąĄčēąĄ čüčéą░ą▒ąĖą╗čīąĮčŗą╝. ąØą░ą▓ąĄčĆąĮąŠąĄ, ąĮą░ą┐ąĖčüą░ą╗ ą┐čĆąŠą┐ąĖčüąĮčŗąĄ ąĖčüčéąĖąĮčŗ, ą║ąŠč鹊čĆčŗąĄ čāčćą░čé ąĮą░ 3 ą║čāčĆčüąĄ čüčéčāą┤ąĄąĮč鹊ą▓... ąÜčĆąĖč鹥čĆąĖąĖ ąØą░ą╣ą║ą▓ąĖčüčéą░ ąĖčéą┤. ąó.ąĄ. ą║ą╗ą░čüčüąĖą║ą░ č鹥ąŠčĆąĖąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ. ąØąŠ čćč鹊 ą┤ąĄą╗ą░čéčī, ąĄčüą╗ąĖ čÅ č鹊ą╗čīą║ąŠ čüąĄą╣čćą░čü ą┤ąŠčĆąŠčü ą┤ąŠ ąĮąĄčæ? ąś čŹč鹊 ą╝ąĄąĮčÅ ą▓ą┤ąŠčģąĮąŠą▓ą╗čÅąĄčé - ąĄčüčéčī ąĮą░ą┤ąĄąČą┤ą░, čćč鹊 čĆąŠą▒ąŠčé ą▒ąĄą│čāčēąĖą╣ ą┐ąŠ ą╗ąĖąĮąĖąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĄčēąĄ ą▒čŗčüčéčĆąĄąĄ.
ąØą░ čĆą░ą┤ąŠčüčéčÅčģ, ąŠčé č鹊ą│ąŠ, čćč鹊 RSLK-MAX ą┐ąŠ čüą▓ąŠąĖą╝ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ čüčĆą░ą▓ąĮčÅą╗čüčÅ čü ą║ą╗ą░čüčüąĖč湥čüą║ąĖą╝ RSLK, ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ čÅ čĆą░ąĘąŠą▒čĆą░ą╗ ąĖ čéą░čĆą│ąĄčé ąĖąĘ ą┐čĆąŠąĄą║čéą░ čāą┤ą░ą╗ąĖą╗. ąØą░ ą▒ą░ąĘąĄ čŹč鹊ą│ąŠ čłą░čüčüąĖ čģąŠčćčā čüą┤ąĄą╗ą░čéčī ą┤čĆčāą│ąŠą│ąŠ čĆąŠą▒ąŠčéą░. ąæąĄą│čāčēąĄą│ąŠ ą┐ąŠ ą╗ąĖąĮąĖąĖ čü TSL1401CL ą¤ąŚąĪ ą╗ąĖąĮąĄą╣ą║ąŠą╣, ą║ąŠč鹊čĆčāčÄ ą┐ąŠą╗-ą│ąŠą┤ą░ ąĮą░ąĘą░ą┤ ą▓čŗ ą┐ąŠčĆąĄą║ąŠą╝ąĄąĮą┤ąŠą▓ą░ą╗ąĖ. ąĪčéčĆąŠąĖčéčī ą┐ą╗ą░ąĮąĖčĆčāčÄ ąĮą░ PSoC5. ąöą░ ą▓ąŠčé č鹊ą╗čīą║ąŠ ą┐ąŠą║čĆčāčéąĖą╗ ą╝ą░ą║ąĄčéą║čā, ą┤ą░ čéą░ą║ ąĖ ąĮąĄ ąĮą░čłąĄą╗, ą║čāą┤ą░ ąĄčæ ąĮą░ čŹč鹊 čłą░čüčüąĖ ą┐čĆąĖą║čĆčāčéąĖčéčī.
ąŁčéąĖ ą▓čŗčģąŠą┤ąĮčŗąĄ čü ąÉąĮą┤čĆąŠąĖą┤ąŠą╝ ą┐čĆąŠą╗ąĄąĮąĖą╗čüčÅ - ąĮąĖč湥ą│ąŠ ąĮąĄ ąĖąĘčāčćą░ą╗. ą¤ąŠč湥ą╝čā Process? ą¤ąŠč鹊ą╝čā, čćč鹊 čüą╗ąŠą▓ą░ ąÜąŠčéą╗ąĖąĮ, ąöąČą░ą▓ą░ - ą┤ą╗čÅ ą╝ąĄąĮčÅ čćčāąČąĖąĄ. ąś čÅ ą┐čĆąŠčüč鹊 ą┐ąŠąĮą░ą┤ąĄčÅą╗čüčÅ, čćč鹊 čģąŠčéčÅ ą▒čŗ ąŠą▒čēąĖąĄ ą┐čĆąĖąĮčåąĖą┐čŗ ąĮą░čćąĮčā ą┐ąŠąĮąĖą╝ą░čéčī, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą▒čŗ ą┐ąĄčĆąĄą╣čéąĖ ą║ AndroidStudio.
ąŁčéąĖ ą▒čāą║ą▓čŗ ASEE ąĮą░čłąĄą╗ ąĮą░ ą┤ąŠą╝ą░čłąĮąĄą╣ čüčéčĆą░ąĮąĖčćą║ąĄ ąÆą░ą╗ą▓ą░ąĮąŠ
http://users.ece.utexas.edu/~valvano/ ąś ą▓ąŠčé čŹčéą░ ą░ą┐ą┐ą╗ąĖą║ą░čåąĖčÅ - čŹč鹊 ASEE 2018 ą│ąŠą┤ą░. ąÆ čüą░ą╝ąŠą╣ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ čćą░čüčéąĖ čüčéčĆą░ąĮąĖčåčŗ ąĮą░ ą│ąŠą╗čāą▒ąĄąĮčīą║ąŠą╝ č乊ąĮąĄ. ąÆ CSSąŠą▓čüą║ąŠą╝ ą▓ąŠčĆą║ą┐ą╗ąĄą╣čüąĄ ąĖčüčģąŠą┤ąĮąŠą│ąŠ č鹥ą║čüčéą░ ą┐čĆąŠąĄą║čéą░ ASEE ąĮąĄčé - ąŠą┤ąĮąĖ č鹊ą╗čīą║ąŠ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ .obj čäą░ą╣ą╗čŗ ąĖ main.c. ąØčā ąĮąĖč湥ą│ąŠ, ą╝ąŠąČąĄčé čüąŠ ą▓čĆąĄą╝ąĄąĮąĄą╝ čüąŠąĘčĆąĄčÄ ą┐ąŠą║ąŠą▓čŗčĆčÅčéčī ąĖ čŹčéčā ą░ą┐ą┐ą╗ąĖą║ą░čåąĖčÄ.
ą¤ąĄčĆąĄą║ą╗ąĄąĖą╗ čéčĆą░čüčüčā ą╗ą░ą▒ąĖčĆąĖąĮčéą░. ąś č鹥ą┐ąĄčĆčī, čćčāą▓čüčéą▓čāčÄ, čćč鹊 ąĮą░ą┤ąŠ ą▒čŗ ą┤ą╗čÅ ą┐ąŠą╗ąĮąŠą│ąŠ ą║ąŠą╝ą┐ą╗ąĄą║čéą░ (ą┤ą╗čÅ čŹčéąĖčģ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖą╣ ą┐ąŠą║ą░ ąĄčēąĄ ąĮąĄ ą░ą║čéčāą░ą╗čīąĮąŠ) ąĮą░ą┐ąĖčüą░čéčī čĆąĄčłąĄąĮąĖąĄ ą╗ą░ą▒ąĖčĆąĖąĮčéą░ ą┤ą╗čÅ ą┐ąŠąĖčüą║ą░ ą║čĆą░čéčćą░ą╣čłąĄą│ąŠ (ąĖ ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠą│ąŠ, čü ą╝ąĖąĮąĖą╝čāą╝ąŠą╝ ą╝ą░ąĮąĄą▓čĆąŠą▓) ą╝ą░čĆčłčĆčāčéą░. ąĪąĄą╣čćą░čü čĆąŠą▒ąŠčé, ą║ąŠąĮąĄčćąĮąŠ čāą┤ą░ą╗čÅąĄčé čéčāą┐ąĖą║ąŠą▓čŗąĄ ą▓ąĄčéą▓ąĖ, ąĮąŠ ą╝ą░čĆčłčĆčāčé ąĮąĄ ą▓čüąĄą│ą┤ą░ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąĮą░ąĖą║čĆą░čéčćą░ą╣čłąĖą╝. ąÜąŠąĮąĄčćąĮąŠ, ąĘą░ą┤ą░ą▓ą░čÅ čüčéčĆą░č鹥ą│ąĖčÄ, čÅ ą╝ąŠą│čā ąĘą░čüčéą░ą▓ąĖčéčī čĆąŠą▒ąŠčéą░ ą┐ąŠą╗čāčćąĖčéčī ąĮą░ąĖą║čĆą░čéčćą░ą╣čłąĖą╣ ą╝ą░čĆčłčĆčāčé (ą┐ąŠą║ą░ čŹč鹊čé ą╗ą░ą▒ąĖčĆąĖąĮčé čÅ ą╝ąŠą│čā ąŠą║ąĖąĮčāčéčī ą▓ąĘą│ą╗čÅą┤ąŠą╝ ąĖ ąŠčåąĄąĮąĖčéčī), ąĮąŠ ąĘą░ą┤ą░čćą║ą░ čéą░ą║ ąĖ ą┐čĆąŠčüąĖčéčüčÅ, čćč鹊ą▒čŗ ąĄčæ čĆąĄčłąĖą╗ąĖ. ąĢčüčéčī ąĖą┤ąĄčÅ ą║ą░ą║ čüą┤ąĄą╗ą░čéčī, čćč鹊ą▒čŗ ąĮąĄ čéčĆąĄą▒ąŠą▓ą░ą╗ąŠčüčī ąŠč湥ąĮčī ą╝ąĮąŠą│ąŠ ą┐ą░ą╝čÅčéąĖ, ą┐čĆą░ą▓ą┤ą░, ą┐ąŠčéčĆąĄą▒čāąĄčéčüčÅ ąĮąĄčüą║ąŠą╗čīą║ąŠ ąĖč鹥čĆą░čåąĖą╣. ąöą╗čÅ ą▓ą┤ąŠčģąĮąŠą▓ąĄąĮąĖčÅ ąĄčüčéčī ąĖąĮč鹥čĆąĄčüąĮą░čÅ čüčéą░čéčīčÅ
https://habr.com/ru/post/445378/ .
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
ąĀąĄą║ą╗ą░ą╝ą░
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
Ser60
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit)
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą┤ąĄą║ 30, 2019 02:18:58
ąöčĆčāą│ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 74
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 607
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą┤ąĄą║ 24, 2008 09:58:58ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3715
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 3
ąśąĮč鹥čĆąĄčüąĮą░čÅ ą┐ą╗ą░čéą░, čā ą╝ąĄąĮčÅ čéą░ą║ąŠą╣ ąĮąĄčé. ą×ą┤ąĮą░ą║ąŠ, ąĮą░ ąĮąĄą╣ čüč鹊ąĖčé PSoC-6 ą┐čĆąŠčåąĄčüčüąŠčĆ ą▒ąĄąĘ ą▓čüčÅą║ąŠą╣ connectivity. ą¤ąŠčüą╗ąĄą┤ąĮčÅčÅ ą┤ąŠčüčéąĖą│ą░ąĄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ą£čÄčĆą░č鹊ą▓čüą║ąŠą│ąŠ ą╝ąŠą┤čāą╗čÅ, ąŠčüąĮąŠą▓ą░ąĮąĮąŠą│ąŠ ąĮą░ ąæčĆąŠą░ą┤ą║ąŠą╝ąŠą▓čüą║ąŠą╝ BT/WiFi čćąĖą┐ąĄ CYW4343W. ąÆąŠąŠą▒čēąĄ, čā PSoC-6 čćąĖą┐ąŠą▓ ąĮą░ ą▒ąŠčĆčéčā ąĖąĘ ą▒ąĄąĘą┐čĆąŠą▓ąŠą┤ą║ąĖ č鹊ą╗čīą║ąŠ BLE (ą╝ąŠą┤ąĄą╗ąĖ 63/64). ąöąŠ čŹč鹊ą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī WiFi ąĮą░ Mudus ąĮąĄ ą┐čĆąŠą▒ąŠą▓ą░ą╗. ą×ą▒čŗčćąĮąŠ ą┤ą╗čÅ čŹč鹊ą│ąŠ čüą╗čāąČąĖčé Wicked (a ąŠąĮą░ ąĖ BLE ą╝ąŠąČąĄčé). ąØą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╝ čüąĄą╝ąĖąĮą░čĆąĄ ą╝ąĮąĄ čüą║ą░ąĘą░ą╗ąĖ, čćč鹊 ąĄčüą╗ąĖ čģąŠčćčā ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ąĪą░ą╣ą┐čĆąŠą▓čüą║ąĖąĄ WiFi, č鹊 Wicked čüą╗ąĄą┤čāąĄčé ąŠčüčéą░ą▓ąĖčéčī ąĮą░čĆčÅą┤čā čü Modus. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ-ą╗ąĖ čüąĄą╣čćą░čü WiFi ąĮą░ ą£ąŠą┤čāčüąĄ - ąĮąĄ ąĘąĮą░čÄ. ąśąĘ čüąĄą╝ąĖąĮą░čĆą░ čÅ čéą░ą║ ą┐ąŠąĮčÅą╗, čćč鹊 ą┐ąŠą║ą░ ąĮąĄčé, ąĮąŠ ą╝ąŠą│čā ąŠčłąĖą▒ą░čéčīčüčÅ. ąÆčüčæ-čéą░ą║ąĖ čüąĄą╝ąĖąĮą░čĆ ą▒čŗą╗ ą┐čĆąŠ BT-mesh. ąÜčüčéą░čéąĖ, CYW4343W čćąĖą┐ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé č鹊ą╗čīą║ąŠ BLE 4.1. ąĪčéčĆą░ąĮąĮąŠ, čćč鹊 ą▓ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ čāą┐ąŠą╝ąĖąĮą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ Modus. ą£ąŠąČąĄčé ą╗čāčćčłąĄ CY8CPROTO-063-BLE ą║čāą┐ąĖčéčī, ąĖą╗ąĖ WiFi ąĮčāąČąĄąĮ? ąŻ ąĪąĖą╗ą╗ą░ą▒ąŠą▓ čĆą░ąĘčĆą░ą▒ąŠčéą║ą░ WiFi ąĖ BT ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮą░ ą▓ Studio. ą¤čĆą░ą▓ą┤ą░, čā ąĮąĖčģ ąĮąĄčé WiFi+BLE čāčüčéčĆąŠą╣čüčéą▓.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
uldemir
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit)
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čÅąĮą▓ 01, 2020 16:48:37
ąöčĆčāą│ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
ąÆąŠąĘą╝ąŠąČąĮąŠ, ą╝ąĄąĮčÅ ą▒ąŠą╗čīčłąĄ ą║ą░ą║ čĆą░ąĘ ąĖąĮč鹥čĆąĄčüąŠą▓ą░ą╗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą║ą░ą║ čéą░ą║ąŠą▓ąŠą╣, ą▒ąĄąĘ connectivity. ą¤ąŠč鹊ą╝čā ą║ą░ą║ ą▓ ą▓ąŠą┐čĆąŠčüą░čģ čüą▓čÅąĘąĖ čÅ čüąŠą▓ąĄčĆčłąĄąĮąĮąŠ čüą╗ą░ą▒ ąĖ ą┐ą╗ąŠčģąŠ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄ, ą║ą░ą║ čŹč鹊 čĆą░ą▒ąŠčéą░ąĄčé ą▓ąŠąŠą▒čēąĄ. ą¤ąŠčŹč鹊ą╝čā ą╝ąŠą╣ ą▓čŗą▒ąŠčĆ ą┐ą░ą╗ ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čü ąŠčéą┤ąĄą╗čīąĮčŗą╝ BLE ą╝ąŠą┤čāą╗ąĄą╝. ąÉ ąĘą░ čüč湥čé č鹊ą│ąŠ, čćč鹊 čā ąĮąĄą│ąŠ ą┤ą▓ą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ - ą▒čāą┤ąĄčé ąĘą░ą┐ą░čüąĮąŠą╣ ą▓ą░čĆąĖą░ąĮčé, ąĄčüą╗ąĖ ą╝ąĮąĄ ąĮąĄ čģą▓ą░čéąĖčé ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą┤ą╗čÅ ą░ąĮą░ą╗ąĖąĘą░ ą║ą░čĆčéąĖąĮą║ąĖ čü ą¤ąŚąĪ ą╗ąĖąĮąĄą╣ą║ąĖ. UDB ą▒ą╗ąŠą║ąĖ ąŠą║ą░ąĘčŗą▓ą░čÄčéčüčÅ čā ąĮąĄą│ąŠ ąĄčüčéčī (ąĮą░ ą║ą░čĆčéąĖąĮą║ąĄ čüč鹊čÅą╗ čŹč鹊čé ą╝ąŠą┤čāą╗čī čü ą║čĆą░čÄčłą║čā, ą┐ąŠčćčéąĖ ąĮąĄąĘą░ą╝ąĄčéąĮąŠ).
ąÆąŠąŠą▒čēąĄ, čŹčéąĖ ą▒ą╗ąŠą║ąĖ ą┐ąŠą╝ąŠą│ą░čÄčé čāą┐čĆąŠčüčéąĖčéčī ą┐čĆąŠą│čĆą░ą╝ą╝čā. ąĢčüą╗ąĖ ą▓ MSP432 ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┐čĆąŠą╣ą┤ąĄąĮąĮąŠą│ąŠ ą┐čāčéąĖ ąĖ ą║ąŠąĮčéčĆąŠą╗čÅ ą▓čĆą░čēąĄąĮąĖčÅ ą║ąŠą╗čæčü ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą▓čŗąĘčŗą▓ą░čÄčéčüčÅ č鹥ą╝ čćą░čēąĄ, č湥ą╝ ą▒čŗčüčéčĆąĄąĄ ą▓čĆą░čēą░čÄčéčüčÅ ą║ąŠą╗čæčüą░, č鹊 ą▓ PSoC5 čÅ čŹč鹊čé ą╝ąŠą┤čāą╗čī ąĮą░čĆąĖčüąŠą▓ą░ą╗ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝. ąĪą║ą░ąĘą░ą╗ ą▒čŗ ą▒ąĄąĘ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣... ąĮąŠ čéą░ą╝ ąĄčüčéčī čüą║čĆčŗč鹊ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą▓ ą╝ąŠą┤čāą╗ąĄ QuadDec, čéą░ą║ ą║ą░ą║ 16 ą▒ąĖčé čéą░ą╝ čüčćąĖčéą░čÄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéąĮąŠ, ą░ ąŠčüčéą░ą╗čīąĮčŗąĄ 16 - ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ. ąÆąŠčé ą┐čĆąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ 16 ą▒ąĖčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĖ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ.
ąŁč鹊 čÅ ą▓čŗčéą░čēąĖą╗ ąŠą┤ąĖąĮ ą║ą░ąĮą░ą╗ ą▓ č鹥čüč鹊ą▓čāčÄ ą║ąŠąĮčüčéčĆčāą║čåąĖčÄ, čćč鹊ą▒čŗ ą┐čĆąŠčüą╗ąĄą┤ąĖčéčī ąĘą░ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄą╝ ą╝ąŠą┤čāą╗čÅ. ąÆą╝ąĄčüč鹊 EncRightA ą▒čŗą╗ ą┐čĆąŠčüč鹊 ą┐ąŠą▓ąĄčüąĖą▓čłąĖ čüąĮą░čćą░ą╗ą░ ą║ąĮąŠą┐ą║čā, ą░ ą┐ąŠąĘąČąĄ ą│ąĄąĮąĄčĆą░č鹊čĆ, čćč鹊ą▒čŗ čāą▒ąĄą┤ąĖčéčīčüčÅ čćč鹊 ą▓čüčæ čĆą░ą▒ąŠčéą░ąĄčé, ą║ą░ą║ ąĘą░ą┤čāą╝čŗą▓ą░ą╗ąŠčüčī. ą¤ąŠą║ą░ čćč鹊, čüąĖčüč鹥ą╝ą░ čüčćąĖčéą░ąĄčé ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą╝ąĄąČą┤čā čäčĆąŠąĮčéą░ą╝ąĖ ąĖą╝ą┐čāą╗čīčüąŠą▓ ąĮą░ EncRightA. ąÉ EncRightB ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čĆą░čēąĄąĮąĖčÅ. ąĢčüą╗ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ čäčĆąŠąĮčéą░ ąĖą╝ą┐čāą╗čīčüą░ ąĮą░ čŹč鹊ą╝ ą▓čģąŠą┤ąĄ ą▒čŗą╗ą░ ą╗ąŠą│1, č鹊 ą▓ ąĄą┤ąĖąĮąĖčåčā čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąŠą┤ąĖąĮ čéčĆąĖą│ą│ąĄčĆ, ąĄčüą╗ąĖ ą╗ąŠą│0, č鹊 ą▓č鹊čĆąŠą╣. Timer_Right ąŠčéą╝ąĄčĆčÅąĄčé ą▓čĆąĄą╝čÅ ą╝ąĄąČą┤čā čäčĆąŠąĮčéą░ą╝ąĖ ąĖą╝ą┐čāą╗čīčüąŠą▓. ą×ąĮ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ OneShot čéą░ą╣ą╝ąĄčĆ, ąĖ ą┐ąŠ ą┐čĆąĖčģąŠą┤čā čäčĆąŠąĮčéą░ ąĖą╝ą┐čāą╗čīčüą░ ąĘąĮą░č湥ąĮąĖąĄ Counter čéą░ą╣ą╝ąĄčĆą░ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą▓ Capture čĆąĄą│ąĖčüčéčĆ. ąóčāčé ąČąĄ čüč湥čéčćąĖą║ "ąŠą▒ąĮčāą╗čÅąĄčéčüčÅ" ąĖ ąĮą░čćąĖąĮą░ąĄčé ąŠčéčüč湥čé čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ąĖąĮč鹥čĆą▓ą░ą╗ą░. ąÆąŠčé čéčāčé čćąĖčéą░ą╗-čćąĖčéą░ą╗ ą┤ą░čéą░čłąĖčé ąĮą░ čéą░ą╣ą╝ąĄčĆ ąĖ ą▓ ąŠą┐ąĖčüą░ąĮąĖąĖ ą│ąŠą▓ąŠčĆąĖą╗ąŠčüčī, čćč鹊 čüąĖą│ąĮą░ą╗ čĆąĄčüąĄčé čüą▒čĆą░čüčŗą▓ą░ąĄčé ą╝ąĮąŠą│ąŠ č湥ą│ąŠ, ąĮąŠ ą┐čĆąŠ čĆąĄą│ąĖčüčéčĆ ąĘą░čģą▓ą░čéą░ ąĮąĖč湥ą│ąŠ ąĮąĄ ą│ąŠą▓ąŠčĆąĖą╗ąŠčüčī. ąÆąŠčé ąĖ čģąŠč鹥ą╗ąŠčüčī ą┐čĆąŠą▓ąĄčĆąĖčéčī, ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠ ą╗ąĖ čüąĖą│ąĮą░ą╗ čüą▒čĆąŠčüą░ ąĮąĄ čéčĆąŠąĮąĄčé čĆąĄą│ąĖčüčéčĆ ąĘą░čģą▓ą░čéą░. ąÆąŠąŠą▒čēąĄ, ą┐čĆąŠ čĆąĄą│ąĖčüčéčĆ ąĘą░čģą▓ą░čéą░ ą▓ ą┤ą░čéą░čłąĖč鹥 ą║ą░ą║ą░čÅ-č鹊 ąĮąĄ ą┐ąŠą╗ąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ. ąØąŠ ą╝ąĮąĄ ą┐ąŠą▓ąĄąĘą╗ąŠ - ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠ, čĆąĄčüąĄčé ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ čĆąĄą│ąĖčüčéčĆ ąĘą░čģą▓ą░čéą░, ą┐ąŠčŹč鹊ą╝čā čÅ ąĄą│ąŠ ą╝ąŠą│čā čüčćąĖčéą░čéčī č鹊ą│ą┤ą░ ą║ąŠą│ą┤ą░ ą╝ąĮąĄ čŹč鹊 čāą┤ąŠą▒ąĮąŠ ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ Capture. ąĢčüą╗ąĖ ąČąĄ ąĖą╝ą┐čāą╗čīčüąŠą▓ ą┤ąŠą╗ą│ąŠ ąĮąĄčé (ąŠą▒ąŠčĆąŠčéčŗ ąŠč湥ąĮčī ąĮąĖąĘą║ąĖąĄ), č鹊 čüč湥čéčćąĖą║ ą╝ąŠąČąĄčé ą┤ąŠčüčćąĖčéą░čéčī ą┤ąŠ čüą▓ąŠąĄą│ąŠ ą┐čĆąĄą┤ąĄą╗ą░ (65535) ąĖ ąĮą░ ąŠą┤ąĖąĮ čéą░ą║čé ą▓čŗčüčéą░ą▓ąĖčéčī ą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ąĮą░ ą▓čŗčģąŠą┤ąĄ TC. ąŁč鹊čé čüąĖą│ąĮą░ą╗ čüą▒čĆąŠčüąĖčé ąŠą▒ą░ čéčĆąĖą│ą│ąĄčĆą░ ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĖčģ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čĆą░čēąĄąĮąĖčÅ, čćč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┤ą▓ąĖą│ą░č鹥ą╗čī ąĮąĄ ą║čĆčāčéąĖčéčüčÅ ąĮąĖ ą▓ą┐ąĄčĆąĄą┤, ąĮąĖ ąĮą░ąĘą░ą┤, ą░ čüč鹊ąĖčé ąĮą░ ą╝ąĄčüč鹥. ąÉ ą▓ąŠčé čéčāčé ąĄčüčéčī ąĮčÄą░ąĮčü, ą║ąŠč鹊čĆčŗą╣ č鹊ąČąĄ ą▓ ą┤ą░čéą░čłąĖč鹥 ąĮąĄ ąŠą┐ąĖčüą░ąĮ (ąĖą╗ąĖ čÅ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé ąĮąĄ ąĮą░čłąĄą╗). ąĢčüą╗ąĖ čéą░ą╣ą╝ąĄčĆ Fixed Function, č鹊 čĆąĄą│ąĖčüčéčĆ ąĘą░čģą▓ą░čéą░ "ąŠą▒ąĮčāą╗čÅąĄčéčüčÅ", ą░ ąĄčüą╗ąĖ UDB, č鹊 ąŠčüčéą░čæčéčüčÅ ąĮąĄąĖąĘą╝ąĄąĮąĮčŗą╝. ąĪąŠą▒čüčéą▓ąĄąĮąĮąŠ, ą╝ąĄąĮčÅ čāčüčéčĆą░ąĖą▓ą░čÄčé ąŠą▒ą░ ą┐ąŠą▓ąĄą┤ąĄąĮąĖčÅ. ąØąŠ, čĆą░ą▒ąŠčéą░ čéą░ą╣ą╝ąĄčĆą░ ą▓ čĆąĄąČąĖą╝ąĄ FF ą╝ąĮąĄ ą┐ąŠąĮčĆą░ą▓ąĖą╗ą░čüčī ą▒ąŠą╗čīčłąĄ, č湥ą╝ UDB. ąĪčéą░ą▒ąĖą╗čīąĮąĄąĄ. ąźąŠčéčÅ FF ą┤ą░čæčé ą▒ąŠą╗čīčłčāčÄ ąĘą░ą┤ąĄčƹȹ║čā ą┐čĆąĖ čüą▒čĆąŠčüąĄ (2 čéą░ą║čéą░, ą┐čĆąŠčéąĖą▓ 1 čéą░ą║čéą░ UDB). ąØąŠ čŹčéą░ ąĘą░ą┤ąĄčƹȹ║ą░ ą┤ąĄč鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĮą░čÅ ąĖ ąĄčæ ą╝ąŠąČąĮąŠ ą║ąŠą╝ą┐ąĄąĮčüąĖčĆąŠą▓ą░čéčī. ąÆąŠąŠą▒čēąĄ, ą▓ čüąĖčüč鹥ą╝ąĄ ąĘą░ą┤ąĄčƹȹ║ą░ 3 čéą░ą║čéą░. ąĢčēąĄ ąŠą┤ąĖąĮ čéą░ą║čé ąĘą░ą┤ąĄčƹȹ║ąĖ ą┤ą░čæčé EdgeDetect. ą¤ąŠčŹč鹊ą╝čā ą▓ ą┤ą░ąĮąĮąŠą╣ č鹥čüč鹊ą▓ąŠą╣ čüčģąĄą╝ąĄ ąĮą░ ą┤ąĖčüą┐ą╗ąĄąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé 0F9D, ą▓ą╝ąĄčüč鹊 0FA0 (4000 = 12000000/3000). ąØąŠ čéą░ą║ ą║ą░ą║ čŹč鹊 ą┐čĆąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗčģ ąŠą▒ąŠčĆąŠčéą░čģ ą╝ąŠč鹊čĆą░ 30000rpm, ą┤ą░ąČąĄ ąĄčüą╗ąĖ ąĮąĄ ą║ąŠą╝ą┐ąĄąĮčüąĖčĆąŠą▓ą░čéčī, ąŠčłąĖą▒ą║ą░ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą╝ąĄąĮąĄąĄ 0.1% - ą┤ąČąĖčéč鹥čĆ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ/菹Įą║ąŠą┤ąĄčĆą░ ą│ąŠčĆą░ąĘą┤ąŠ ą▒ąŠą╗čīčłąĄ.
ą£ą╝ą╝, ą┐ąŠč湥ą╝čā "ąŠą▒ąĮčāą╗čÅąĄčéčüčÅ" čÅ ą┐ąĖčłčā ą▓ ą║ą░ą▓čŗčćą║ą░čģ? ą×č湥ąĮčī ą┐čĆąŠčüč鹊 - ą▓čüąĄ čéą░ą╣ą╝ąĄčĆčŗ čéčāčé čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ą║ą░ą║ count down, ąĖ ą▓ą╝ąĄčüč鹊 0 čéą░ą╝ 0xFFFF. ą¤ąŠčŹč鹊ą╝čā ą┐čĆąĖčģąŠą┤ąĖčéčüčÅ ą┐čĆąĖ čüčćąĖčéčŗą▓ą░ąĮąĖąĖ ą▓čüąĄ ą▒ąĖčéčŗ ą┐ąĄčĆąĄą▓ąŠčĆą░čćąĖą▓ą░čéčī.
ą¤ąŠč湥ą╝čā ą┐čĆąĖčłą╗ąŠčüčī čüčéčĆąŠąĖčéčī č鹥čüč鹊ą▓čāčÄ ą║ąŠąĮčüčéčĆčāą║čåąĖčÄ? ąÉ ą┐ąŠč鹊ą╝čā čćč鹊 ąĮąĄ ąĮą░čłąĄą╗, ą║ą░ą║ ą▓ ąŠčéą╗ą░ą┤čćąĖą║ąĄ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ ąĘą░čģą▓ą░čéą░. ąźąŠčéčÅ, ą╝ąŠąČąĄčé, ą┐čĆąĖčćąĖąĮąŠą╣ č鹊, čćč鹊 ąŠčéą╗ą░ą┤čćąĖą║ ą┐ąŠą║ą░ąĘčŗą▓ą░ą╗ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ counter. ąÉ ą▓ ą┤ą░čéą░čłąĖč鹥, ąĮą░ą┐ąĖčüą░ąĮąŠ, čćč鹊 ą┐čĆąĖ "čćč鹥ąĮąĖąĖ" ąĘąĮą░č湥ąĮąĖčÅ čüč湥čéčćąĖą║ą░ ąŠąĮąŠ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ąĘą░čģą▓ą░čéčŗą▓ą░ąĄčéčüčÅ (ąĖ ą┐ąŠčĆčéąĖčé čĆąĄą│ąĖčüčéčĆ ąĘą░čģą▓ą░čéą░, ąĮą░ą┤ąŠ ą┐ąŠą╗ą░ą│ą░čéčī). ąóčāčé ąĖ Creator ą╝ąĄąĮčÅ č鹊ąČąĄ ą┐ąŠčĆą░ą┤ąŠą▓ą░ą╗ čüą▓ąŠąĖą╝ąĖ ąĮąĄčĆąĄčłąĄąĮąĮčŗą╝ąĖ ą│ą╗čÄą║ą░ą╝ąĖ. ąÜąŠą│ą┤ą░ čÅ ą╗ąĄč鹊ą╝ ąĮą░ čüą▓ąŠčæą╝ ąĮąĄčéą▒čāą║ąĄ čĆą░ą▒ąŠčéą░ą╗ čü PSoC Creator, ąĘą░ą╝ąĄčéąĖą╗, čćč鹊 ą▓ čüčéą░čéčāčüąĮąŠą╣ čüčéčĆąŠą║ąĄ ąĮąĄ čāą┤ą░ą╗čÅčÄčéčüčÅ ąŠčłąĖą▒ą║ąĖ ąŠčé ą┐čĆąĄą┤čŗą┤čāčēąĖčģ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖą╣. ąó.ąĄ. čüą┤ąĄą╗ą░ą╗ čüą▒ąŠčĆą║čā ą┐čĆąŠąĄą║čéą░ - ąŠą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 ąĄčüčéčī 2 ąŠčłąĖą▒ą║ąĖ. ąÆąĮąĖąĘčā ą┐ąŠčÅą▓ąĖą╗ąĖčüčī ą║čĆą░čüąĮčŗąĄ čåąĖčäčĆčŗ
2 Errors . ą» ąĖčüą┐čĆą░ą▓ą╗čÅčÄ, ą┐ąĄčĆąĄčüąŠą▒ąĖčĆą░čÄ, ąĪą▒ąŠčĆą║ą░ ą▒ąĄąĘ ąŠčłąĖą▒ąŠą║. ąØąŠ ą▓ čüčéą░čéčāčüąĮąŠą╣ čüčéčĆąŠą║ąĄ ąŠčłąĖą▒ą║ąĖ ą║ą░ą║ čüč鹊čÅą╗ąĖ čéą░ą║ ąĖ čüč鹊čÅčé. ąś čģčāąČąĄ č鹊ą│ąŠ, ą▓ ąŠą║ąŠčłą║ąĄ Notice List ąŠąĮąĖ č鹊ąČąĄ čüč鹊čÅčé. ąÉ čéčāčé ąĮą░ čüčéą░čåąĖąŠąĮą░čĆąĮąŠą╝ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ ąĮą░ą▒ą╗čÄą┤ą░čÄ čéą░ą║čāčÄ ąČąĄ ą┐čĆąŠą▒ą╗ąĄą╝čā. ą┐čĆąĖč湥ą╝, ąĮąĄ ąĮčāąČąĮąŠ ą┤ą░ąČąĄ ą┤ąĄą╗ą░čéčī čüą▒ąŠčĆą║čā. ąöąŠčüčéą░č鹊čćąĮąŠ ą▓ TopDesign ąŠčéčüąŠąĄą┤ąĖąĮąĖčéčī ąŠą┤ąĮčā čåąĄą┐čī, čćč鹊ą▒čŗ ąĖąĘą╝ąĄąĮąĖčéčī čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ, ą║ą░ą║ ą┐ąŠčÅą▓ą╗čÅčÄčéčüčÅ ą║čĆą░čüąĮčŗąĄ ąŠčłąĖą▒ą║ąĖ, čćč鹊 ą▓čŗą▓ąŠą┤ čéą░ą║ąŠą╣-č鹊, ąĄčüą╗ąĖ ąŠąĮ ąĄčüčéčī, č鹊 ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ. ąś ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čÅ čüą┤ąĄą╗ą░ą╗ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ - ąŠąĮąŠ ąĮąĄ ąĖčüč湥ąĘą░ąĄčé. ą¤ąŠą┐čŗčéą░ą╗čüčÅ ą▓čŗą│čāą│ą╗ąĖčéčī ą┐čĆąŠą▒ą╗ąĄą╝čā. ąöą░, ą┐čĆąŠą▒ą╗ąĄą╝ą░ ąĄčüčéčī ąĖ ąĖąĘą▓ąĄčüčéąĮą░. ąØą░čłąĄą╗ č鹊ą┐ąĖą║, ąŠčé 2017 ą│ąŠą┤ą░. ąóą░ą╝ č湥ą╗ąŠą▓ąĄą║ ąČą░ą╗ąŠą▓ą░ą╗čüčÅ ąĮą░ ą┐čĆąŠą▒ą╗ąĄą╝čā ą▓ ą▓ąĄčĆčüąĖąĖ 4.1. ąĢą│ąŠ ą┐ąŠčüą╗ą░ą╗ąĖ ą▓ Knowledge Base - čéą░ą╝ ąŠąĮąŠ ąŠą┐ąĖčüą░ąĮąŠ ą┤ą╗čÅ ą▓ąĄčĆčüąĖąĖ 4.0 čü ąŠą▒ąĄčēą░ąĮąĖąĄą╝ ąĖčüą┐čĆą░ą▓ąĖčéčī ą▓ 4.1. ąÉ čéčāčé čāąČąĄ 4.2 ąĮą░ ą┤ą▓ąŠčĆąĄ ąĖ 4.3 ą▓ ą▒ąĄčéą░ čüčéą░ą┤ąĖąĖ (ą╝ąŠąČąĄčé, ą▓ 4.3 čŹč鹊 ą┐ąŠą▒ąĄą┤ąĖą╗ąĖ?). ąÉ ą║ą░ą║ workaround ą┐čĆąĄą┤ą╗ąŠąČąĖą╗ąĖ ą┐ąĄčĆąĄąĘą░ą┐čāčüčéąĖčéčī PSoC Creator, ą┤ą╗čÅ čüą▒čĆąŠčüą░ čüčéą░čĆčŗčģ ąŠčłąĖą▒ąŠą║. ąØčā čģąŠčĆąŠčłąŠ, ąĄčēąĄ čćč鹊 Creator ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą▒čŗčüčéčĆąĄąĄ, č湥ą╝ ą┐ąŠą┤ąĄą╗ąĖčÅ ąĮą░ ą▒ą░ąĘąĄ ąŁą║ą╗ąĖą┐čüą░. CCS ą┤ą░ąČąĄ ąĮą░ čüčéą░čåąĖąŠąĮą░čĆąĮąŠą╝ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ąŠč湥ąĮčī ą┤ąŠą╗ą│ąŠ. ąĢčüą╗ąĖ čŹč鹊 ą▒čāą┤ąĄčé ą▓ ą£ąŠą┤čāčüąĄ - čÅ ąĮąĄ ą┐ąĄčĆąĄąČąĖą▓čā. ąĪą╝ąĄčģą░ ą┤ą╗čÅ ą┐ąŠčüčéą░ą▓ąĖą╗ ą£ąŠą┤čāčü. ąŻą▓čŗ, ą┐ąĄčĆąĄčéą░čēąĖčéčī čüčāčēąĄčüčéą▓čāčÄčēąĖąĄ ą┐čĆąŠąĄą║čéčŗ ąĖąĘ Creator ąĮąĄ ą┐čĆąĄą┤ą╗ą░ą│ą░ąĄčé ąĖ ą▓ ąĖą╝ą┐ąŠčĆč鹥 čéą░ą║ąŠą╣ čäąĖčćąĖ ąĮąĄ ąĮą░čłąĄą╗. ą×ą║, ą┐čāčüčéčī ą┐ąŠčüč鹊ąĖčé, ą┐ąŠą┤ąŠąČą┤čæčé ą┐ą╗ą░čéą║ąĖ čü PSoC6.
ąÜčĆąĄą┐ąĄąČąŠą╝ čÅ čĆą░ąĮčīčłąĄ ąĘą░čéą░čĆąĖą▓ą░ą╗čüčÅ ą▓ Wurth (čā ąĮą░čü ą▓ ą│ąŠčĆąŠą┤ąĄ ąĄčüčéčī ą╝ą░ą│ą░ąĘąĖąĮčćąĖą║). ą”ąĄąĮčŗ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą▓čŗčüąŠą║ąĖąĄ, ąĮąŠ ąĘą░č鹊 ąĮąĄčé ą┐čĆąŠą▒ą╗ąĄą╝ čü ą║ą░č湥čüčéą▓ąŠą╝. ąÆąŠčé č鹊ą╗čīą║ąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ čā ąĮąĖčģ ą║ą░ą║ čā ąŠčäąĖčüąŠą▓ ąĖ čüčāą▒ą▒ąŠčéą░-ą▓ąŠčüą║čĆąĄčüąĄąĮčīąĄ - ą▓čŗčģąŠą┤ąĮčŗąĄ. ąóą░ą║ čćč鹊 č鹥ą┐ąĄčĆčī čÅ čéčāą┤ą░ ąĮąĄ ą┐ąŠą┐ą░ą┤ą░čÄ. ąÆąŠčé ąĖ ą┐čĆąĖčģąŠą┤ąĖčéčüčÅ ą┐ąŠą║čāą┐ą░čéčī ą▓ ąĖąĮč鹥čĆąĮąĄčéą░čģ, čéą░ą║ ą║ą░ą║ ą▓ ą┤čĆčāą│ąĖčģ ą╝ą░ą│ą░ąĘąĖąĮą░čģ ąĖą╗ąĖ ąĮąĄčé č鹊ą│ąŠ čćč鹊 ąĮčāąČąĮąŠ, ąĖą╗ąĖ ą║ą░č湥čüčéą▓ąŠ... ąÆąŠąĮ ą▓ ą┐čĆąŠčłą╗čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ č乊č鹊ą│čĆą░čäąĖčĆąŠą▓ą░ą╗ čĆąŠą▒ąŠč鹊ą▓ ąĖ ąĖąĘą▓ąĖąĮčÅą╗čüčÅ čćč鹊 ą│ą░ąĄčćą║ąĖ ąĮąĄ ą┐čĆąĖą║čĆčāč湥ąĮąĮčŗąĄ. ą×ąĮąĖ ą▒čŗą╗ąĖ ąĮąĄ ą┐čĆąĖą║čĆčāč湥ąĮąĮčŗąĄ, ą┐ąŠč鹊ą╝čā čćč鹊 ą│ą░ą╣ą║ąĖ ą║čāą┐ą╗ąĄąĮąĮčŗąĄ ąĮą░ ą▒ą░ąĘą░čĆąĄ - čéčĆąĄčéčī ą▒čĆą░ą║. ąś ą║ąŠą│ą┤ą░ ą╝ąĮąĄ ąĮą░ą┤ąŠąĄą╗ąŠ ąĖčüą║ą░čéčī ą▓ čŹč鹊ą╝ ą▒ą░čĆą░čģą╗ąĄ ąĮąŠčĆą╝ą░ą╗čīąĮčŗąĄ ą│ą░ą╣ą║ąĖ, ą▒čĆąŠčüąĖą╗ čÅ čŹčéčā ąĘą░č鹥čÄ ąĖ ą┐ąŠčłąĄą╗ ąĘą░ą║ą░ąĘčŗą▓ą░čéčī ąĮą░ čäą░čĆąĮąĄą╗ąĄ ąĮąŠčĆą╝ą░ą╗čīąĮčŗąĄ ą│ą░ą╣ą║ąĖ ą£2.5. ąĪą░ą╝ čÅ ąĘą░ą║ą╗ą░ą┤čŗą▓ą░čÄčüčī ąĮą░ ą£3 - čā ą╝ąĄąĮčÅ ąĖčģ ąĮą░ąĖą▒ąŠą╗ąĄąĄ čłąĖčĆąŠą║ąĖą╣ ą░čüčüąŠčĆčéąĖą╝ąĄąĮčé ą┐ąŠ čéąĖą┐ą░ą╝, ą┐ąŠ ą┤ą╗ąĖąĮą░ą╝. ą£ąĄąĮčīčłąĖąĄ - ąĖčģ ą│ąŠčĆą░ąĘą┤ąŠ ą╝ąĄąĮčīčłąĄ. ąÉ ąĮąĄ ą╝ąĄčéčĆąĖčćčüą║ąĖąĄ, čéąĖą┐ą░ #2-56 - čüčéą░čĆą░čÄčüčī ąĖąĘą▒ąĄą│ą░čéčī. ąźąŠčéčÅ, ą║čāą┤ą░ ąŠčé ąĮąĖčģ ą┤ąĄąĮąĄčłčīčüčÅ, ąĄčüą╗ąĖ Pololu ą║ąŠą╝ą┐ą╗ąĄą║čéčāąĄčé ą▓čüčæ čéą░ą║ąĖą╝ąĖ ą▓ąĖąĮčéąĖą║ą░ą╝ąĖ.
ąØčā ąĖ ą║ąŠąĮąĄčćąĮąŠ, ąĪ ąĮąŠą▓čŗą╝ ą│ąŠą┤ąŠą╝!
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
Ser60
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit)
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čÅąĮą▓ 01, 2020 21:44:29
ąöčĆčāą│ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 74
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 607
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą┤ąĄą║ 24, 2008 09:58:58ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3715
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 3
ąŻ ą╝ąĄąĮčÅ čü PSoC-6 čéą░-ąČąĄ ą┐čĆąŠą▒ą╗ąĄą╝ą░, čćč鹊 ąĖ čü MSP432 - ą║ąŠčĆą┐čāčüą░. ąŻ PSoC ą▓ čŹč鹊ą╝ ąŠčéąĮąŠčłąĄąĮąĖąĖ ąĄčēčæ čģčāąČąĄ, čé.ą║. ąŠąĮąĖ ą▓čŗą┐čāčüą║ą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ BGA-ą┐ąŠą┤ąŠą▒ąĮčŗčģ čü ą╝ąĖą╗ą╗ąĖąŠąĮąŠą╝ ą▓čŗą▓ąŠą┤ąŠą▓. ą×čüčéą░čæčéčüčÅ ąĮą░ą┤ąĄčÅčéčīčÅčüčÅ ą╗ąĖčłčī ąĮą░ čĆą░čüą┐ą░čÅąĮąĮčŗąĄ ąĮą░ ą┐ą╗ą░čéą░čģ čćąĖą┐čŗ. ąÆ čĆąŠą▒ąŠčé čéą░ą║čāčÄ ą┐ą╗ą░čéčā ą┐ąŠčüčéą░ą▓ąĖčéčī, ąĮą░ą▓ąĄčĆąĮąŠąĄ, ą┐čĆąŠą▒ą╗ąĄą╝ ąĮąĄčé, ąĮąŠ ą▓ ą┐ąŠą┤ąĄą╗ą║čā ą║ą░ą║-č鹊 ąĮąĄ ąŠč湥ąĮčī. ąĢčüčéčī, ą┐čĆą░ą▓ą┤ą░, ą▓ą░čĆąĖą░ąĮčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī BLE ą╝ąŠą┤čāą╗ąĖ ąĮą░ ąŠčüąĮąŠą▓ąĄ PSoC-6. ąŻ ąĮąĖčģ ą▓čüąĄą│ąŠ 43 ą▓čŗą▓ąŠą┤ą░ ą┐ąŠ ą┐ąĄčĆąĖč乥čĆąĖąĖ čü čłą░ą│ąŠą╝ 0.9ą╝ą╝ ąĖ ąĖčģ ą╝ąŠąČąĮąŠ ąĖ ąĮą░ čüą▓ąŠčÄ ą┐ą╗ą░čéčā ą▓ ą┐ąŠą┤ąĄą╗ą║čā ą┐ąŠčüčéą░ą▓ąĖčéčī, ą┤ą░ąČąĄ ąĄčüą╗ąĖ Bluetooth ąĮąĄ ąĮčāąČąĄąĮ. ąóą░ą╝ ąĖ ąŠą▒ą▓čÅąĘą║ą░ ą▓čüčÅ čāąČąĄ ąĖą╝ąĄąĄčéčüčÅ. ą×ą┤ąĮą░ą║ąŠ, čüč鹊čÅčé ąŠąĮąĖ 15-16$. ą£ąŠąČąĮąŠ ąĖ ą┐čĆąĖą╝ąĄąĮąĖčéčī, ąĄčüą╗ąĖ ą┤ą▓ąŠą╣ąĮąŠąĄ čÅą┤čĆąŠ ąĮčāąČąĮąŠ. ąöą╗čÅ ą╝ąŠąĖčģ čåąĄą╗ąĄą╣ ą┤ą▓ąŠą╣ąĮąŠąĄ čÅą┤čĆąŠ ąĖą╝ąĄąĄčé čüą╝čŗčüą╗ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą▒ąĄčüą┐čĆąŠą▓ąŠą┤ą║ąĖ - ąĮą░ ąŠą┤ąĮąŠą╝ ąĖąĘ ąĮąĖčģ čüč鹥ą║ ą┐čĆąŠč鹊ą║ąŠą╗ą░, ąĮą░ ą┤čĆčāą│ąŠą╝ ą▓čüčæ ąŠčüčéą░ą╗čīąĮąŠąĄ. ST č鹊ąČąĄ ą┐ąŠ čéą░ą║ąŠą╝čā ą┐čāčéąĖ ą┐ąŠčłą╗ąĖ, ą┤ą░ ąĖ ą┤čĆčāą│ąĖąĄ čäąĖčĆą╝čŗ č鹊ąČąĄ. ąśąĮą░č湥 čüąŠ čüą║ąŠą╗čī-ąĮąĖą▒čāą┤čī čüą╗ąŠąČąĮčŗą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝ + čüč鹥ą║ ą┐čĆąĖčģąŠą┤ąĖčéčüčÅ čüčéą░ą▓ąĖčéčī RTOS, ąĖ, ą▓ ąŠą▒čēąĄą╝, ą┐ąŠą║ą░ čéą░ą║ ą╝ąŠąČąĮąŠ ąČąĖčéčī. ą£ąŠąČąĄčé ąÆą░ą╝ ą▓ ą┐ą╗ą░ąĮąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ąĮą░ čéčĆčæčģ-čÅą┤ąĄčĆąĮčŗąĄ ąĖąĘą┤ąĄą╗ąĖčÅ ą▓ ą╗ąĖąĮąĄą╣ą║ąĄ LPC ąŠčé NXP ąĖą╗ąĖ ą┐čĆąŠčüč鹊 ą║ą░ą║ąĖąĄ-ąĮąĖą▒čāčéčī ą▒čŗčüčéčĆčŗąĄ ąĖąĘ čüąĄčĆąĖąĖ STM32F4/F7? ą¤ąŠą╝ąĮčÄ ą┤ą╗čÅ čŹč鹊ą╣ ą║ą░ą╝ąĄčĆčŗ ąĮą░ ą╝ą░čłąĖąĮą║ą░čģ čü čāčüą┐ąĄčģąŠą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖčüčī ąĮąĄ čüą╗ąĖčłą║ąŠą╝ čłčāčüčéčĆčŗąĄ ą┐ą╗ą░čéčŗ ą£ąÜ ąŠčé Freescale.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
uldemir
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit)
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ čÅąĮą▓ 04, 2020 12:03:03
ąöčĆčāą│ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
ąÆąŠčé ą┐čĆąŠ čéąĖą┐čŗ ą║ąŠčĆą┐čāčüąŠą▓ ą┤ą╗čÅ PSoC6 čÅ ąĖ ąĮąĄ ą┐ąŠčüą╝ąŠčéčĆąĄą╗. ąØčā čŹč鹊 ą┐čĆąŠčüč鹊 ą┤ą╗čÅ ąĖąĮč鹥čĆąĄčüą░. ą¤ąŠą║ą░ čü ąĮąĖą╝ ąĮąĖč湥ą│ąŠ ąĮąĄ ą┐ą╗ą░ąĮąĖčĆčāčÄ (ą║ą░ą║ ą▒čŗą╗ąŠ ąĖ čü MSP432). ąźąŠčćčā č鹊ą╗čīą║ąŠ ą┐ąŠą┤čüčéčĆą░čģąŠą▓ą░čéčīčüčÅ. ąÉ č鹊 ą┐ąŠą┐čŗčéą░ą╗čüčÅ čŹą║čüčéčĆą░ą┐ąŠą╗ąĖčĆąŠą▓ą░čéčī ąŠą▒čĆą░ą▒ąŠčéą║čā 8 č乊č鹊 čüąĄąĮčüąŠčĆąŠą▓ ąĮą░ 128 čüąĄąĮčüąŠčĆąŠą▓ ą¤ąŚąĪ ą╗ąĖąĮąĄą╣ą║ąĖ ąĖ, ą▓ąŠąĘąĮąĖą║ą╗ąŠ čüčéčĆą░ąĮąĮąŠąĄ ą┐čĆąĄą┤čćčāą▓čüčéą▓ąĖąĄ. ą×ąČąĖą┤ą░čÄ ą▒ąŠą╗čīčłčāčÄ ą┐čĆąŠą▒ą╗ąĄą╝čā ą▓ čĆą░ąĘą╗ąĖčćąĖąĖ ąŠčüą▓ąĄčēąĄąĮąĮąŠčüčéąĖ "ą║ą░ą┤čĆą░". ąØą░ą┤ąŠ ą▒čāą┤ąĄčé, ą▓ąĄčĆąŠčÅčéąĮąŠ, č湥čĆąĄąĘ ą┐ąĄčĆą▓čŗąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĮčŗąĄ ą║ą░čĆčéąĖąĮą║čā ą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī. ąØąŠ čŹč鹊 ą┐ąŠąĘąČąĄ.
30 000 rpm - čŹč鹊 ąĖą╝ąĄąĮąĮąŠ ą╝ąŠč鹊čĆ čĆąŠą▒ąŠčéą░. ą¦č鹊 ą▓ RSLK, čćč鹊 ą▓ LineFollower. ąØčā, ą╝ąŠąČąĄčé, ą▓ RSLK čćčāčéčī ą┐ąŠ ą╝ąĄą┤ą╗ąĄąĮąĮąĄąĄ. ąÜąŠą│ą┤ą░ ą┤ąĄą╗ą░ą╗ 17 ą╗ą░ą▒.čĆą░ą▒ąŠčéčā ąĖ ą┤ą▓ąĖą│ą░č鹥ą╗čī ą▒ąĄčüą║ąŠąĮčéčĆąŠą╗čīąĮąŠ čĆą░ąĘą│ąŠąĮčÅą╗čüčÅ, čā ą╝ąĄąĮčÅ ą┐ąŠą║ą░ąĘčŗą▓ą░ą╗ąŠ ą▒ąŠą╗ąĄąĄ 220 rpm (ą║ąŠą╗ąĄčüą░), čćč鹊 čü čāč湥č鹊ą╝ čĆąĄą┤čāą║č鹊čĆą░ 1:120 ą┤ą░čæčé 26000 rpm ą╝ąŠč鹊čĆą░. ąÆ LineFollower ąĖčüą┐ąŠą╗čīąĘčāčÄ ą╝ąŠč鹊čĆčŗ
Pololu micro metal gear ąĖ, ąĄčüą╗ąĖ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ąĮą░ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ, č鹊 ą╝ąŠčēąĮčŗąĄ ą╝ąŠč鹊čĆčŗ (HP - High Power) ąĖą╝ąĄčÄčé ąŠčé 31000 ą┤ąŠ 33000 rpm. ąØąŠ ą▓ ą┤ą░ąĮąĮąŠą╝ čüą╗čāčćą░ąĄ ą┐čĆąŠą▒ą╗ąĄą╝čā ą▓čŗąĘčŗą▓ą░ąĄčé ąĮąĖąČąĮčÅčÅ ą│čĆą░ąĮąĖčåą░. ą¤ąŠ ą║ąĮąĖąČą║ąĄ ąÆą░ą╗ą▓ą░ąĮąŠ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ (ąĖ čā ą╝ąĄąĮčÅ ą┐ąŠą╗čāčćąĖą╗ąĖčüčī ą┐ąŠčģąŠąČąĖąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ), čćč鹊 ą┐ąŠčüč鹊čÅąĮąĮą░čÅ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ (čü čĆąĄą┤čāą║č鹊čĆąŠą╝ ąĖ ą║ąŠą╗ąĄčüąŠą╝) ąŠą║ąŠą╗ąŠ 100ą╝čü. ąĪą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ, čćą░čüč鹊čéą░ ą▓čŗąĘąŠą▓ą░ ą¤ąś ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ąĘ ą▓ 10 ą▒ąŠą╗čīčłąĄ - ą▓čŗą▒ąĖčĆą░ąĄą╝ ąŠą║ąŠą╗ąŠ 10ą╝čü. ąöą░ą╗ąĄąĄ ą▓čĆąĄą╝čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┐ąĄčĆąĖąŠą┤ą░ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ąĖą╝ą┐čāą╗čīčüąŠą▓ čéą░čģąŠą┤ą░čéčćąĖą║ą░. ą¢ąĄą╗ą░č鹥ą╗čīąĮąŠ, ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą¤ąś ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čüą▓ąĄąČąĖą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ, ą┐ąŠčŹč鹊ą╝čā 12ą£ąōčå ąĖ 16 ą▒ąĖčé ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čÄčé 5.461ą╝čü - ą▓ą┐ąŠą╗ąĮąĄ ą┐čĆąĖąĄą╝ą╗ąĄą╝čŗą╣ ą▓ą░čĆąĖą░ąĮčé. ąŻą╝ąĄąĮčīčłą░čéčī čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī ąĮąĄą╗čīąĘčÅ, čéą░ą║ ą║ą░ą║ rpm ą║ ą┐ąĄčĆąĖąŠą┤čā - ąŠą▒čĆą░čéąĮą░čÅ čäčāąĮą║čåąĖčÅ ąĖ ą┐čĆąĖ ą╝ą░ą╗čŗčģ ąĘąĮą░č湥ąĮąĖčÅčģ čłą░ą│ąĖ ą▒čāą┤čāčé ąŠč湥ąĮčī ą│čĆčāą▒čŗą╝ąĖ. ąÆąŠčé ąĖ čüąĄą╣čćą░čü ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąŠčé 8000 ą┤ąŠ 65535. ąÆ ą┐čĆąĄą┤čŗą┤čāčēąĄą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ čÅ ąĮąĄ ą▓ąĄčĆąĮąŠ ą▓čŗą▒čĆą░ą╗ čćą░čüč鹊čéčā. 3 ąÜą│čå čéą░ą╝ ąĮąĄ ą▒čāą┤ąĄčé. ą×ą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 ąĮąĄčüą╝ąŠčéčĆčÅ ąĮą░ č鹊 čćč鹊 ą╝ą░ą│ąĮąĖčéąĮčŗą╣ ą┤ąĖčüą║ 6-ą┐ąŠą╗čÄčüąĮčŗą╣, ą┤ą░čéčćąĖą║ąĖ ą┤ą░čÄčé č鹊ą╗čīą║ąŠ 3 ąĖą╝ą┐čāą╗čīčüą░ ąĮą░ ąŠą▒ąŠčĆąŠčé. ąØą░ą▓ąĄčĆąĮąŠąĄ, čüčĆą░ą▒ą░čéčŗą▓ą░čÄčé č鹊ą╗čīą║ąŠ ąĮą░ ąŠą┤ąĮąŠ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝ą░ą│ąĮąĖčéąĮčŗčģ ą╗ąĖąĮąĖą╣, ą░ ąĮą░ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠąĄ - ąĮąĄ čüčĆą░ą▒ą░čéčŗą▓ą░čÄčé. ąØčā čéą░ą║ ą▓ąŠčé, čćč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ - 65535. ąŁč鹊 5.461 ą╝čü - ą┐ąĄčĆąĖąŠą┤ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ąĖą╝ą┐čāą╗čīčüąŠą▓. ąóą░ą║ ą║ą░ą║ ąĮą░ ąŠą▒ąŠčĆąŠčé ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ą┐čĆąĖčģąŠą┤ąĖčéčüčÅ 3 ąĖą╝ą┐čāą╗čīčüą░, ąĘąĮą░čćąĖčé ąŠą┤ąĖąĮ ąŠą▒ąŠčĆąŠčé ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąĘą░ 16.384 ą╝čü. ąØčā ąĖ ą┤ąĄą╗ąĖą╝ 60 čüąĄą║čāąĮą┤ ąĮą░ 16.384 = 3662 ąŠą▒ąŠčĆąŠčéą░ ą▓ ą╝ąĖąĮčāčéčā. ąŁč鹊 ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗąĄ ąŠą▒ąŠčĆąŠčéčŗ. ąŻ čĆąŠą▒ąŠčéą░ ą┤ą╗čÅ Line Follower ą┤ą▓ąĖą│ą░č鹥ą╗čī ąĖą╝ąĄąĄčé čĆąĄą┤čāą║č鹊čĆ 1:10 - ąĘąĮą░čćąĖčé ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗąĄ ąŠą▒ąŠčĆąŠčéčŗ 366 rpm, čćč鹊 ą┐čĆąĖ ą┤ą╗ąĖąĮąĄ ąŠą║čĆčāąČąĮąŠčüčéąĖ ą║ąŠą╗ąĄčüą░ ą▓ 66 ą╝ą╝ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čüą║ąŠčĆąŠčüčéąĖ ąŠą║ąŠą╗ąŠ 40 čüą╝/čü. ą£ąĮąŠą│ąŠą▓ą░č鹊. (čā RSLK čŹčéąĖ ąČąĄ ąŠą▒ąŠčĆąŠčéčŗ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ ą┐čĆąĖ čĆąĄą┤čāą║č鹊čĆąĄ 1:120 ąĖ ąŠą║čĆčāąČąĮąŠčüčéąĖ ą║ąŠą╗ąĄčüą░ 220 ą╝ą╝ ą┤ą░čÄčé, čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ, 31 rpm ąĖ 10 čüą╝/čü (ą│čĆčāą▒ąŠ)). ąöą╗čÅ ąŠą┐čāčüą║ą░ąĮąĖčÅ ąĮąĖąČąĮąĄą╣ ą│čĆą░ąĮąĖčåčŗ, ąĮą░ą┤ąŠ ąĖą╗ąĖ čāą▓ąĄą╗ąĖčćąĖą▓ą░čéčī ą▓čĆąĄą╝čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ, čćč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ čāą▓ąĄą╗ąĖč湥ąĮąĖčÄ ą▓čĆąĄą╝ąĄąĮąĖ čĆąĄą░ą║čåąĖąĖ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ, ąĖą╗ąĖ čāą▓ąĄą╗ąĖčćąĖčéčī čćąĖčüą╗ąŠ čüąŠą▒čŗčéąĖą╣ ąĮą░ ąŠą┤ąĖąĮ ąŠą▒ąŠčĆąŠčé. ąÆč鹊čĆąŠą╣ ą▓ą░čĆąĖą░ąĮčé ą┤ą╗čÅ RSLK č鹊ąČąĄ ąĮąĄ ąŠčüąŠą▒ąŠ ą┐čĆąĖąĄą╝ą╗ąĄą╝, čéą░ą║ ą║ą░ą║ ą║ą░ąČą┤ąŠąĄ čüąŠą▒čŗčéąĖąĄ ą┤ąŠą╗ąČąĮąŠ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ - ą░ čŹč鹊 ą▓čĆąĄą╝čÅ! ąś ą▓ąŠčé ąĄčüą╗ąĖ čüąĄą╣čćą░čü čā ą╝ąĄąĮčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╝ąŠą│čāčé ą▓čŗąĘčŗą▓ą░čéčīčüčÅ čü ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čćą░čüč鹊č鹊ą╣ 1.5 ą║ąōčå, č鹊 ą┐čĆąĖ čāą▓ąĄą╗ąĖč湥ąĮąĖąĖ - čŹčéą░ čćą░čüč鹊čéą░ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ čāą▓ąĄą╗ąĖčćąĖčéčüčÅ. ąÆ PSoC, čéą░ą║ ą║ą░ą║ ą▓čüčæ čŹč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą░ą┐ą┐ą░čĆą░čéąĮąŠ, ą┐čĆąŠą▒ą╗ąĄą╝ ąĮąĖą║ą░ą║ąĖčģ ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą▓čŗąĘą▓ą░čéčī. ą¤čĆąŠą▒ą╗ąĄą╝čā ą▓čŗąĘčŗą▓ą░ąĄčé č鹊, čćč鹊 ą┤ą╗čÅ čāą▓ąĄą╗ąĖč湥ąĮąĖčÅ čćąĖčüą╗ą░ ąĖą╝ą┐čāą╗čīčüąŠą▓, ą╝ąŠąČąĮąŠ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čüą╗ąĄą┤čāčÄčēąĖąĄ ą╝ąĄčĆąŠą┐čĆąĖčÅčéąĖčÅ: ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░čéčī ąĮąĄ č鹊ą╗čīą║ąŠ čäčĆąŠąĮčé, ąĮąŠ ąĖ čüą┐ą░ą┤; ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓č鹊čĆąŠą╣ ą║ą░ąĮą░ą╗ č鹊ąČąĄ. ąØąŠ čéčāčé čÅ ą┐čĆąĖą║ąĖąĮčāą╗, čćč鹊 ąĄčüą╗ąĖ čŹčéąĖ ąŠą▒ą░ čüąĖą│ąĮą░ą╗ą░ čü 菹Įą║ąŠą┤ąĄčĆą░ ąŠą▒čŖąĄą┤ąĖąĮąĖčéčī č湥čĆąĄąĘ ąĖčüą║ą╗čÄčćą░čÄčēąĄąĄ ąśąøąś, čÅ ą╝ąŠą│čā ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐ąŠą╗čāč湥ąĮąĮčŗąĄ čäčĆąŠąĮčéčŗ ą┤ą╗čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ąĖąĮč鹥čĆą▓ą░ą╗ą░ ą╝ąĄąČą┤čā čäčĆąŠąĮč鹊ą╝ ąĖ čüą┐ą░ą┤ąŠą╝ ąŠą┤ąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ąĖą╗ąĖ ąĄčüą╗ąĖ ą║ąŠąĮčéčĆąŠą╗ąĖčĆąŠą▓ą░čéčī ąĄčēąĄ ąĖ čüą┐ą░ą┤čŗ, č鹊 ą┐ąŠą╗čāčćąĖčéčī ą▓čüčÄ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ čĆą░ąĘčĆąĄčłą░čÄčēčāčÄ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī 菹Įą║ąŠą┤ąĄčĆą░ - 12 cpr (ąĖą╝ą┐čāą╗čīčüąŠą▓ ąĮą░ ąŠą▒ąŠčĆąŠčé). ą¤čĆą░ą▓ą┤ą░, čü ąŠčéą╗ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄą╝ čüą┐ą░ą┤ąŠą▓ ąĄčüčéčī ą┐čĆąŠą▒ą╗ąĄą╝ą░. ąĢčüą╗ąĖ EdgeDetect ą▒ąĄąĘ ą┐čĆąŠą▒ą╗ąĄą╝ čŹč鹊čé čĆąĄąČąĖą╝ ą▓ą║ą╗čÄčćą░ąĄčéčüčÅ, č鹊 čā čéą░ą╣ą╝ąĄčĆą░ ą▓ čĆąĄąČąĖą╝ąĄ Fixed Function čéą░ą║ąŠą╣ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąĮąĄčé. ą×ąĮą░ ąĄčüčéčī č鹊ą╗čīą║ąŠ čā čéą░ą╣ą╝ąĄčĆą░ ą▓ čĆąĄąČąĖą╝ąĄ UDB. ąØčā čćč鹊 ąČ, ą┐ąŠą┐čĆąŠą▒čāčÄ ąĮą░ ą┐čĆąŠą▒ąĮąŠą╣ ą┐ą╗ą░čéą║ąĄ ą┐čĆąŠą▓ąĄčĆąĖčéčī ą║ą░ą║ čŹč鹊čé čĆąĄąČąĖą╝ ą┐ąŠą╣ą┤čæčé.
ąÉ č鹥ą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝, čüąĮąŠą▓ą░ ą┐ąŠą╣ą╝ą░ą╗ ą┐ą░čĆčā čĆą░ąĘ čĆąŠą▒ąŠčéą░ ąĮą░ č鹊ą╝, čćč鹊 ąŠąĮ ąĘą░ą▒ą╗čāą┤ąĖą╗čüčÅ ą▓ ą╗ą░ą▒ąĖčĆąĖąĮč鹥. ąóą░ą║ ą║ą░ą║ čÅ čāąČąĄ ą▒čŗą╗ čüą┤ąĄą╗ą░ą▓čłąĖ ąČčāčĆąĮą░ą╗ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠą║ą░ąĘą░ąĮąĖą╣ čüąĄąĮčüąŠčĆąŠą▓ ą╗ąĖąĮąĖąĖ, čé.ąĄ. čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ čüąŠą▒ąĖčĆą░čÄčéčüčÅ ąĖ ą┤ą░ąČąĄ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą▓ąŠ čäą╗ąĄčł-ą┐ą░ą╝čÅčéčī. ąØąŠ ą▓ąŠčé čāą┤ąŠą▒ąĮąŠą│ąŠ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░ ą┤ą╗čÅ ą┐čĆąŠčüą╝ąŠčéčĆą░ čéą░ą║ ąĖ ąĮąĄčé. ąÆąŠčé ąĖ čĆąĄčłąĖą╗ ąĮąĄą╝ąĮąŠą│ąŠ ą┐ąŠčĆąĄčłą░čéčī čŹč鹊čé ą▓ąŠą┐čĆąŠčü. ąÆąŠ-ą┐ąĄčĆą▓čŗčģ ąĖąĘą╝ąĄąĮąĖą╗ čāčüą╗ąŠą▓ąĖąĄ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą╗ąŠą│-čäą░ą╣ą╗ą░. ąóąĄą┐ąĄčĆčī ąŠąĮ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ąĄčüą╗ąĖ čĆąŠą▒ąŠčé ąĘą░ą▓ąĄčĆčłą░ąĄčé čĆą░ą▒ąŠčéčā čü ąŠčłąĖą▒ą║ąŠą╣. ąÉ ą▓ąŠ ą▓č鹊čĆčŗčģ, ą║ čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆą░čÅ č湥čĆąĄąĘ UART čüą╗ąĖą▓ą░ąĄčé ą║ą░čĆčéčā, ą┤ąŠą▒ą░ą▓ąĖą╗ ąĖ ą┐ąĄčĆąĄą┤ą░čćčā ą╗ąŠą│-čäą░ą╣ą╗ą░ ą▓ "ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆąŠą▓ą░ąĮąĮąŠą╝" ą▓ąĖą┤ąĄ:
ąĪą┐ąŠą╣ą╗ąĄčĆ ąÜąŠą┤:
17.2125,...**..., ,Segment
ą¤ąĄčĆą▓ąŠąĄ ą┐ąŠą╗ąĄ - ą▓čĆąĄą╝čÅ ą▓ čüąĄą║čāąĮą┤ą░čģ, ą▓č鹊čĆąŠąĄ ą┐ąŠą╗ąĄ - ą┐ąŠą║ą░ąĘą░ąĮąĖčÅ čüąĄąĮčüąŠčĆą░ ą╗ąĖąĮąĖąĖ: "*" - č湥čĆąĮąŠąĄ, "." - ą▒ąĄą╗ąŠąĄ, ąĘą░č鹥ą╝ čäą╗ą░ą│ąĖ ąĮą░ą╣ą┤ąĄąĮąĮčŗčģ ą┐ąŠą▓ąŠčĆąŠč鹊ą▓: ą╗ąĄą▓čŗą╣, ą┐čĆčÅą╝ąŠ, ą┐čĆą░ą▓čŗą╣ ąĖ ą▓ ą║ąŠąĮčåąĄ ąĖą╝čÅ čäčāąĮą║čåąĖąĖ ą│ą┤ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ: ą▓ ą│ą╗ą░ą▓ąĮąŠą╣ Solve_Maze ąĖą╗ąĖ ą▓ čäčāąĮą║čåąĖčÅčģ Run_Segment ąĖą╗ąĖ Turn. ąØą░ ą┐ąŠą║ą░ąĘą░ąĮąĮąŠą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą▓ąĖą┤ąĮąŠ, čćč鹊 čĆąŠą▒ąŠčé ąĖą┤čæčé ą┐ąŠ čüąĄą│ą╝ąĄąĮčéčā ą┤ąŠą▓ąŠą╗čīąĮąŠ čĆąŠą▓ąĮąŠ - ą╗ąĖąĮąĖčÅ ą┐ąŠą┤ čåąĄąĮčéčĆą░ą╗čīąĮčŗą╝ąĖ ą┤ą░čéčćąĖą║ą░ą╝ąĖ, ą┐ąŠč鹊ą╝ ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ čćč鹊-č鹊 č湥čĆąĮąŠąĄ čü ą┐čĆą░ą▓ąŠą│ąŠ ą║čĆą░čÅ ąĖ ą║ąŠą│ą┤ą░ čŹč鹊 ąĘą░čäąĖą║čüąĖčĆąŠą▓ą░ąĮąŠ ą┤ą▓ą░ ąŠčéčüč湥čéą░ ą┐ąŠą┤čĆčÅą┤ čäčāąĮą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą▓ ą│ą╗ą░ą▓ąĮčāčÄ čäčāąĮą║čåąĖčÄ Solve_Maze ąĮą░ 17.23 čüąĄą║čāąĮą┤ąĄ. ą×ąĮą░ ąĮą░čćąĖąĮą░ąĄčé ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ čāąĘą╗ą░. ąĮą░ 17,2650 ą┐čĆąŠą┐ą░ą╗ čüąĖą│ąĮą░ą╗ čü ą▒ąŠą║ąŠą▓ąŠą│ąŠ ą┤ą░čéčćąĖą║ą░, ąĮąŠ čĆąŠą▒ąŠčé ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ą┤ą▓ąĖą│ą░čéčīčüčÅ ąĄčēąĄ 10 ąŠčéčüč湥č鹊ą▓, čćč鹊ą▒čŗ ą▓čŗčÅčüąĮąĖčéčī, ąĄčüčéčī čģąŠą┤ ą┐čĆčÅą╝ąŠ ąĖą╗ąĖ ąĮąĄčé (čģą╝, čéčāčé ą▓ąĖą┤ąĮąŠ, čćč鹊 čÅ ą╝ąŠą│čā ą▒čŗčüčéčĆąĄąĄ ąŠčéą║ą░ąĘą░čéčīčüčÅ ąŠčé ą┐ąŠąĖčüą║ą░, ąĄčüą╗ąĖ čŹč鹊 ą┐ąŠą▓ąŠčĆąŠčé, ą░ ąĮąĄ T-ąŠą▒čĆą░ąĘąĮčŗą╣ ą┐ąĄčĆąĄą║čĆčæčüč鹊ą║). ąś č鹊ą│ą┤ą░, ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĮą░ąĘąĮą░čćą░ąĄčé ąĮąŠą╝ąĄčĆ čŹč鹊ą╝čā čāąĘą╗čā - 15. ą¤čĆą░ą▓ą┤ą░, ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ čéčāčé čāą║ą░ąĘą░ąĮčŗ ąĮčāą╗ąĄą▓čŗąĄ, ą┐ąŠč鹊ą╝čā ą║ą░ą║ čÅ čŹč鹊 ą┤ąŠą▒ą░ą▓ąĖą╗ ą┐ąŠąĘąČąĄ ąĖ čŹč鹊ą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą▓ ą╗ąŠą│-čäą░ą╣ą╗ąĄ ąĮąĄčé. ąöą░ą╗ąĄąĄ, čĆąŠą▒ąŠčé ą┤ą▓ąĖąČąĄčéčüčÅ ąĄčēąĄ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą▓čĆąĄą╝čÅ ą▓ą┐ąĄčĆąĄą┤, čćč鹊ą▒čŗ čåąĄąĮčéčĆ čĆąŠą▒ąŠčéą░ ąŠą║ą░ąĘą░ą╗čüčÅ ąĮą░ą┤ čåąĄąĮčéčĆąŠą╝ ą┐ąĄčĆąĄą║čĆčæčüčéą║ą░(ą┐ąŠą▓ąŠčĆąŠčéą░ ąĖą╗ąĖ čéčāą┐ąĖą║ą░) ąĖ ąĮą░ 17,345 čüąĄą║čāąĮą┤ąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąŠčéą┤ą░čæčéčüčÅ čäčāąĮą║čåąĖąĖ ą┐ąŠą▓ąŠčĆąŠčéą░, ą║ąŠč鹊čĆą░čÅ ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą┐ąŠą▓ąŠčĆąŠčé.ąŁč鹊čé ą╗ąŠą│-čäą░ą╣ą╗ ą┐ąŠą║ą░ąĘą░ą╗, čćč鹊 ą▓čüčæ čĆą░ą▒ąŠčéą░ąĄčé ą▓ąĄčĆąĮąŠ, ą░ "ąĘą░ą▒ą╗čāą┤ąŠą▓ą║ą░" čüą╗čāčćąĖą╗ą░čüčī ą┐ąŠč鹊ą╝čā, čćč鹊 čĆąŠą▒ąŠčé ąĮąĄ ąŠą┐ąŠąĘąĮą░ą╗ ą▓ąŠąĘą▓čĆą░čé ąĮą░ čāąĘąĄą╗ 3, ą░ ą┐čĆąĖčüą▓ąŠąĖą╗ ąĮąŠą▓čŗą╣ ąĮąŠą╝ąĄčĆ - 10 (ąĮą░ čéčĆą░čüčüąĄ čüąĄą╣čćą░čü ą▓čüąĄą│ąŠ 9 čāąĘą╗ąŠą▓). ą¤ąŠčŹč鹊ą╝čā, ąĄčēąĄ čüą┤ąĄą╗ą░ą╗ čćč鹊ą▒čŗ ą▓ ą╗ąŠą│-čäą░ą╣ą╗ ą┐ąĖčüą░ą╗ąĖčüčī ąĖ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ čāąĘą╗ąŠą▓ ąĖ , ą┤čāą╝ą░čÄ, ąĮą░ą┤ąŠ čüą┤ąĄą╗ą░čéčī ąĘą░ą┐ąĖčüčī ą┤ą╗ąĖąĮ ą┐čĆąŠą╣ą┤ąĄąĮąĮčŗčģ čüąĄą│ą╝ąĄąĮč鹊ą▓. ąĢčüą╗ąĖ čü ą│ąĄąŠą╝ąĄčéčĆąĖąĄą╣ čüąĄą╣čćą░čü ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▒ąŠą╗ąĄ-ą╝ąĄąĮąĄąĄ ąĮąŠčĆą╝ą░ą╗čīąĮąŠ, č鹊 č鹥ą┐ąĄčĆčī ą┐čĆąĖčćąĖąĮą░ ą▓ "ąĮąĄą┐ąŠą┐ą░ą┤ą░ąĮąĖąĖ" ą║ąŠąŠčĆą┤ąĖąĮą░čé ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠčüą║ą░ą╗čīąĘčŗą▓ą░ąĮąĖąĄ ą║ąŠą╗čæčü ą┐čĆąĖ čüčéą░čĆč鹥. ąÆčüčæ ąČąĄ čŹč鹊čé ą¤ąś ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čüčéą░čĆą░ąĄčéčüčÅ ą▓čŗą┐ąŠą╗ąĮąĖčéčī "ąĘą░čÅą▓ą║čā čüą▓ąĄčĆčģčā" ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▒čŗčüčéčĆąŠ ąĖ č鹊čćąĮąŠ. ą¤ąŠčŹč鹊ą╝čā ąĄčüą╗ąĖ ąĄą╝čā ąĘą░ą┤ą░ąĮąŠ ą║čĆčāčéąĖčéčīčüčÅ 110 rpm, ąŠąĮ čü ą╝ąĄčüčéą░ ąĖ ą┐čŗčéą░ąĄčéčüčÅ ąĮą░ ą▓čüąĄ 110 čĆą▓ą░ąĮčāčéčī. ąóą░ą║ čćč鹊 č鹥ą┐ąĄčĆčī ąĮą░ą┤ąŠ ąŠąĘą░ą▒ąŠčéąĖčéčīčüčÅ ą▒ąŠą╗ąĄąĄ ą┐ą╗ą░ą▓ąĮčŗą╝ čĆą░ąĘą│ąŠąĮąŠą╝. ąźąŠčéčÅ, čā ą╝ąĄąĮčÅ čāąČąĄ ąĄčüčéčī ą┐ą░čĆą░ą╝ąĄčéčĆ acceleration. ąĪąĄą╣čćą░čü, ąŠąĮ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čāą▓ąĄą╗ąĖčćąĖą▓ą░čéčī čüą║ąŠčĆąŠčüčéčī ąĮą░ 1.28 rpm ąĘą░ 2.5 ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤čŗ. ąØąŠ č鹊ą╗ą║čā ąŠčé čŹč鹊ą│ąŠ ą╝ą░ą╗ąŠ, čéą░ą║ ą║ą░ą║ ą¤ąś ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čĆąĄą░ą╗čīąĮąŠ čćč鹊-č鹊 čüą╝ąŠąČąĄčé ą┤ąĄą╗ą░čéčī č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ ąĘąĮą░č湥ąĮąĖąĄ ą┐čĆąĄą▓čŗčüąĖčé 30.5 rpm - ą┤ąŠ čŹč鹊ą│ąŠ ą╝ąŠą╝ąĄąĮčéą░ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą▒čāą┤ąĄčé čüąŠą▓ąĄčĆčłąĄąĮąĮąŠ ąĮąĄą░ą┤ąĄą║ą▓ą░čéąĮčŗą╝. ąØą░ą┤ąŠ ąĄčēąĄ ą┤čāą╝ą░čéčī.
ąøąŠą│ ą┐ąĖčłąĄčéčüčÅ ą┤ąŠ, ą┐čĆąĖą╝ąĄčĆąĮąŠ, 20 čüąĄą║čāąĮą┤čŗ. čÅ ą▓čŗą┤ąĄą╗ąĖą╗ ąĮą░ čŹč鹊 ą┤ąĄą╗ąŠ 16ąÜ ą┐ą░ą╝čÅčéąĖ. ą┐čĆą░ą▓ą┤ą░, ą▓ ą║ąŠąĮčåąĄ ąĖą┤čæčé ą║ą░ą║ą░čÅ-č鹊 ą▒ąĄą╗ąĖą▒ąĄčĆą┤ą░ ąĖ ąĮąĄ ą╝ąŠą│čā ą┐ąŠąĮčÅčéčī ąŠčéą║čāą┤ą░ čŹč鹊čé ą╝čāčüąŠčĆ ą▓ąĘčÅą╗čüčÅ. ą£ąŠąČąĄčé, ąŠą┐čÅčéčī čüč鹥ą║ ąĮą░ąĄąĘąČą░ąĄčé ą║čāą┤ą░ ąĮąĄ ąĮą░ą┤ąŠ? ąĪąŠą▒čüčéą▓ąĄąĮąĮąŠ, ą┐čĆąĖčćąĖąĮą░ ą▓ č鹊ą╝, čćč鹊 ąŠą▒ą░ čĆąŠą▒ąŠčéą░ čā ą╝ąĄąĮčÅ ą▓ą░ą╗ąĖą╗ąĖčüčī ą▓ GPF ą▓ č鹊ą╝, čćč鹊 čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ ą▒čŗą╗ ą▒ąŠą╗čīčłąĄ, č湥ą╝ ąÜąĄą╣ą╗ ą┐ąŠą┤ ąĮąĄą│ąŠ ą▓čŗą┤ąĄą╗čÅą╗. ąÉ ą▓čŗą┤ąĄą╗čÅąĄčé ąŠąĮ ą▓čüąĄą│ąŠ 512 ą▒ą░ą╣čé. ąś čüą░ą╝ąŠąĄ ąŠą▒ąĖą┤ąĮąŠąĄ, čćč鹊 čüč鹥ą║ čĆą░ąĘą╝ąĄčēą░ąĄčéčüčÅ ąĮąĄ ą▓ ą║ąŠąĮčåąĄ ą×ąŚąŻ (ą║ą░ą║ ąŠą▒čŗčćąĮąŠ ą┐čĆąĖąĮčÅč鹊), ą░ čüčĆą░ąĘčā ąĘą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╣/čüčéą░čéąĖč湥čüą║ąŠą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ąŠčéčüčćąĖčéą░ą╗ 512 ą▒ą░ą╣čé ąĖ ą┐ąŠčüčéą░ą▓ąĖą╗ ą▓ąĄčĆčłąĖąĮčā čüč鹥ą║ą░. ąś ą┐ą╗ąĄą▓ą░čéčī, čćč鹊 čā ą╝ąĄąĮčÅ ą▓ ą║ą░ą║ąŠą╣-č鹊 čäčāąĮą║čåąĖąĖ ąĄčüčéčī ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖą╣ ą╝ą░čüčüąĖą▓ ąĮą░ ą║ąĖą╗ąŠą▒ą░ą╣čé, ą░ č鹊 ąĖ ąĮą░ 4. ąĪą┤ąĄą╗ą░ą╗, ą║ą░ą║ čĆąĄą║ąŠą╝ąĄąĮą┤ąŠą▓ą░ą╗ąĖ, ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ ą▓ ą╗ąĖčüčéąĖąĮą│ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠą▒ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ čüč鹥ą║ą░. ąĪąĄą╣čćą░čü čāč鹊ą┐čéą░ą╗ ą┐ą░ą╝čÅčéčī ąĖ ą┐ąŠą╗čāčćąĖą╗:
ąÜąŠą┤:
Maximum Stack Usage for __rt_entry_main 0x188 bytes.
ąó.ąĄ. č鹥ą┐ąĄčĆčī ą┤ą░ąČąĄ ą▓ ą┤ąĄč乊ą╗čéąĮčŗąĄ 0x200, ą▓ąŠąĘą╝ąŠąČąĮąŠ, čāą║ą╗ą░ą┤čŗą▓ą░čÄčüčī, čéą░ą║ ą║ą░ą║ ą▓ čŹč鹊ą╝ čĆąĄą┐ąŠčĆč鹥 ąĮąĄ ą┐ąŠą║ą░ąĘą░ąĮąŠ, čüą║ąŠą╗čīą║ąŠ čüč鹥ą║ą░ ąŠčéčŖąĄą┤ą░čÄčé ą▓čŗąĘąŠą▓čŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąöą░ ąĖ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ ąĮąĄ ą╝ąŠąČąĄčé čŹč鹊ą│ąŠ čüą┤ąĄą╗ą░čéčī, čéą░ą║ ą║ą░ą║ ą▓ąŠ ą╝ąĮąŠą│ąĖčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅčģ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ CallBack. ąóą░ą║ čćč鹊 ąĮąĖą║č鹊 ąĮąĄ ąĘąĮą░ąĄčé, ą║čāą┤ą░ ąŠąĮąŠ ą┐ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÄ ą┤ą░ą╗čīčłąĄ ą┐ąŠą╣ą┤čæčé.
ą¤ąŠą┐čāčéąĮąŠ čāąĘąĮą░ą╗, čćč鹊 ą┤ąĄą╗ąĄąĮąĖąĄ ąĮą░ 0 ą▒ąĄąĘ čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ č鹥ą╗ąŠą┤ą▓ąĖąČąĄąĮąĖą╣ GPF ąĮąĄ ą▓čŗąĘčŗą▓ą░ąĄčé. ąØąŠ č鹥ą╝ ąĮąĄ ą╝ąĄąĮąĄąĄ, čüą┤ąĄą╗ą░ą╗ ą╝ą░ą╗ąĄąĮčīą║ąĖą╣ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ GPF, čćč鹊ą▒čŗ čÅ ąĘąĮą░ą╗, čćč鹊 čĆąŠą▒ąŠčé čéčāą┤ą░ ą▓ą▓ą░ą╗ąĖą╗čüčÅ - ą▓ą║ą╗čÄčćą░ąĄčé ą▒ąĄą╗čŗą╣ čåą▓ąĄčé ąĮą░ čéčĆčæčģčåą▓ąĄčéąĮąŠą╝ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąĄ ąĖ, ą│ą╗ą░ą▓ąĮąŠąĄ, ą▓čŗą║ą╗čÄčćą░ąĄčé ą┤ą▓ąĖą│ą░č鹥ą╗ąĖ.
p.s. ąĢčēąĄ ą┐ąŠą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░ą╗ ą╗ąŠą│ąĖ, čĆąŠą▒ąŠčé čüą▒ąĖą╗čüčÅ ą┐ąŠč鹊ą╝čā, čćč鹊 ąŠą┤ąĖąĮ ąĖąĘ čüąĄą│ą╝ąĄąĮč鹊ą▓ą┐ąŠ ą║ąŠč鹊čĆąŠą╝čā ąĄčģą░ą╗ "ąĮą░ ą▓ąŠčüč鹊ą║" , ąĖąĘą╝ąĄčĆąĖą╗ ąĮą░ 28ą╝ą╝ ą┤ą╗ąĖąĮąĮąĄąĄ, č湥ą╝ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮčŗą╣, ą┐ąŠ ą║ąŠč鹊čĆąŠą╝čā ąĄčģą░ą╗ "ąĮą░ ąĘą░ą┐ą░ą┤". ąÉ ą│čĆą░ąĮąĖčåčā ą┤ąŠą┐čāčüą║ą░ čÅ ą┐ąŠčüčéą░ą▓ąĖą╗ 26ą╝ą╝. ąÆąŠčé ąĖ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ąŠą▒čĆą░ąĘąŠą▓ą░ą╗čüčÅ "ąĮąŠą▓čŗą╣" čāąĘąĄą╗. ą¤čĆą░ą▓ą┤ą░, čÅ ąĖąĘą╝ąĄčĆąĖą╗ ą╗ąĖąĮąĄą╣ą║ąŠą╣ - č鹊čé ą▓č鹊čĆąŠą╣, ąĮą░ 10ą╝ą╝ ą┤ą╗ąĖąĮąĮąĄąĄ čüą░ą╝ ą┐ąŠ čüąĄą▒ąĄ. ąØąŠ ąĘą░ą║ąŠąĮąŠą╝ąĄčĆąĮąŠčüčéčī ąĘą░ą╝ąĄčéąĖą╗, čćč鹊 ąĄčüą╗ąĖ čĆąŠą▒ąŠčé ą▓čģąŠą┤ąĖčé ąĮą░ čāčćą░čüč鹊ą║ ą┐ąŠčüą╗ąĄ ą┐ąŠą▓ąŠčĆąŠčéą░, čĆąĄąĘčāą╗čīčéą░čé ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čüąĄą│ą╝ąĄąĮčéą░ ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĮą░ 20-24 ą╝ą╝ ą▒ąŠą╗čīčłąĄ, č湥ą╝ ąĄčüą╗ąĖ ąŠąĮ ą┐ąŠą┐ą░ą┤ą░ąĄčé ąĮą░ čŹč鹊čé ąČąĄ čüąĄą│ą╝ąĄąĮčé ą┐čĆąŠą┤ąŠą╗ąČą░čÅ ą┐čĆčÅą╝ąŠą╗ąĖąĮąĄą╣ąĮąŠąĄ ą┤ą▓ąĖąČąĄąĮąĖąĄ.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĀąĄą║ą╗ą░ą╝ą░
Ser60
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit)
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ čÅąĮą▓ 08, 2020 07:58:13
ąöčĆčāą│ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 74
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 607
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą┤ąĄą║ 24, 2008 09:58:58ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3715
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 3
ą¤čĆąĄą┤čüčéą░ą▓ąĖą╗ čüąĄą│ąŠą┤ąĮčÅ ą║ ą┐čāą▒ą╗ąĖą║ą░čåąĖąĖ ąĘą┤ąĄčüčī ą┐ąĄčĆą▓čŗąĄ 2 čćą░čüčéąĖ čüčéą░čéčīąĖ ą┐čĆąŠ Bluetooth, ą║ą░ą║ ąŠą▒ąĄčēą░ą╗. ąÆ ą┐čĆąŠčåąĄčüčüąĄ ąĮą░ą┐ąĖčüą░ąĮąĖčÅ čéčĆąĄčéčīąĄą╣ čćą░čüčéąĖ (ą┐ąŠčüą▓čÅčēąĄąĮą░ ąŠąĮą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ Bluetooth ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ą┐ąŠą┤ Micrium RTOS) čÅą▓ąĮąŠ ąŠčēčāčéąĖą╗, čćč鹊 ą┐čĆąĄąČą┤ąĄ čüą╗ąĄą┤čāąĄčé ą┐čĆąŠ čüą░ą╝čā čŹčéčā RTOS čüčéą░čéčīčÄ ąĮą░ą┐ąĖčüą░čéčī, čćč鹊ą▒čŗ ą▒čŗą╗ąŠ ą▓čüčæ ą┐ąŠąĮčÅčéąĮąŠ. ąÆ čĆčāčüčüą║ąŠ-čÅąĘčŗčćąĮąŠą╝ čüąĄą║č鹊čĆąĄ ąĮąĄąĖą▒ąŠą╗ąĄąĄ ą┐ąŠą┐čāą╗čÅčĆąĮą░ FreeRTOS, ą┐čĆąŠ ą║ąŠč鹊čĆčāčÄ ą║čāčćą░ čüčéą░č鹥ą╣, ą░ ą┐čĆąŠ čŹčéčā - ąĮąĄ ąĘąĮą░čÄ, ą╝ąŠąČąĄčé č鹊ąČąĄ ąĄčüčéčī ą│ą┤ąĄ-č鹊. ąĢčēčæ ą╝ąĄąĮčÅ č鹥čƹʹ░čÄčé čüą╝čāčéąĮčŗąĄ čüąŠą╝ąĮąĄąĮąĖčÅ, čćč鹊 ąÆčŗ ą╝ąŠąČąĄčé ą▒čāą┤ąĄč鹥 čćčāčéčī-ą╗ąĖ ąĮąĄ ąĄą┤ąĖąĮčüčéą▓ąĄąĮąĮčŗą╝, ą║ąŠą╝čā čŹč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĮč鹥čĆąĄčüąĮąŠ - čüčāąČčā ą┐ąŠ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ąĮą░ č乊čĆčāą╝ąĄ ą▓ ą┐ą╗ą░ąĮąĄ Bluetooth. ą¤ąŠčŹč鹊ą╝čā ą╝ąŠąČąĄčé ą▒čāą┤ąĄčé ą╗čāčćčłąĄ ąŠą┐čāą▒ą╗ąĖą║ąŠą▓ą░čéčī čéčĆąĄčéčīčÄ (ąĖ RTOS) čćą░čüčéčī ąĮą░ ą┤čĆčāą│ąŠą╝ čĆąĄčüčāčĆčüąĄ. ąÆą┐čĆąŠč湥ą╝, ą┐ąŠčüą╝ąŠčéčĆąĖą╝.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
uldemir
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit)
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé čÅąĮą▓ 09, 2020 08:02:10
ąöčĆčāą│ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
ąĪ ąĮąĄč鹥čĆą┐ąĄąĮąĖąĄą╝ ąČą┤čā, ą║ąŠą│ą┤ą░ ąōą╗ą░ą▓ąĮčŗą╣ ąÜąŠčé ąŠč鹊ą╣ą┤čæčé ąŠčé ą┐čĆą░ąĘą┤ąĮąĖą║ąŠą▓ ąĖ ąĮą░ąČą╝čæčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░čÄčēčāčÄ ą║ąĮąŠą┐ą║čā. ąóąŠ čćč鹊 ąĮąĄčé ą░ą║čéąĖą▓ąĮąŠčüčéąĖ, ą▓ąŠąĘą╝ąŠąČąĮąŠ, čćč鹊 ą╝ąĮąŠą│ąĖąĄ ąĮąĄ ą┐ąĖčłčāčé, ąĮąŠ čćąĖčéą░čÄčé. ąĪ ą┤čĆčāą│ąŠą╣ čüč鹊čĆąŠąĮčŗ, ą┤ąŠą╗ąČąĮą░ ąĮą░ą▒čĆą░čéčīčüčÅ "ą║čĆąĖčéąĖč湥čüą║ą░čÅ ą╝ą░čüčüą░" ąĘąĮą░ąĮąĖą╣, čćč鹊ą▒čŗ ąĮą░čćą░ą╗ąĖ ą┐ąŠčÅą▓ą╗čÅčéčīčüčÅ ą▓ąŠą┐čĆąŠčüčŗ. ą£ąĮąĄ čŹčéčā ą║čĆąĖčéąĖč湥čüą║čāčÄ ą╝ą░čüčüčā ą┤ą░ą╗ąĖ ą▓ąŠčé čŹčéąĖ ą╗ą░ą▒ąŠčĆą░č鹊čĆąĮčŗąĄ čĆą░ą▒ąŠčéčŗ. ąĪąŠą▒čüčéą▓ąĄąĮąĮąŠ, čĆą░ąĘą▒ąĖčĆą░čÅčüčī čü 19 čĆą░ą▒ąŠč鹊ą╣, čā ą╝ąĄąĮčÅ ąĖ čüą╗čāčćąĖą╗čüčÅ ą┐čĆąŠčĆčŗą▓, čćč鹊 ąĮą░čćą░ą╗ ą┐ąŠąĮąĖą╝ą░čéčī ąĖ ą┐ąŠčÅą▓ąĖą╗ąĖčüčī ą▓ąŠą┐čĆąŠčüčŗ. ąÉ č鹊 čŹč鹊ą│ąŠ: ąĮčā ąĄčüčéčī "č湥čĆąĮčŗą╣ čÅčēąĖą║", ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ą║ąŠą╝ą┐ąŠčĆčé, ą┐čŗčéą░čÄčēąĖą╣čüčÅ ąĖąĘąŠą▒čĆą░ąĘąĖčéčī ąĖąĘ čüąĄą▒čÅ čüčéą░čĆčŗą╣ č鹥ą╗ąĄč乊ąĮąĮčŗą╣ ą╝ąŠą┤ąĄą╝.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
uldemir
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit)
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé čÅąĮą▓ 09, 2020 19:43:29
ąöčĆčāą│ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
ą×! ą░ čÅ ąĖ ąĮąĄ ąĘąĮą░ą╗, čćč鹊 ąŠąĮ čéą░ą║ ąĘąŠą▓čæčéčüčÅ. ąöą░, čćč鹊-č鹊 ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ čÅ ąĖ ą┐čŗčéą░čÄčüčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī. ąóąŠą╗čīą║ąŠ ą┐ąŠą╝ąĖą╝ąŠ ą▓ąĄčüą░ čĆąĄą▒čĆą░ ą│čĆą░čäą░ čģąŠčćčā ą▓ą▓ąĄčüčéąĖ ąĖ ą▓ąĄčü ą┐čĆąŠčģąŠą┤ą░ č湥čĆąĄąĘ ą▓ąĄčĆčłąĖąĮčā. ąóą░ą║ ą║ą░ą║ ą╗ą░ą▒ąĖčĆąĖąĮčé ąŠčĆč鹊ą│ąŠąĮą░ą╗čīąĮčŗą╣, č鹊 ą┐čĆąŠčģąŠą┤ č湥čĆąĄąĘ ą▓ąĄčĆčłąĖąĮčā ąĮąĄ ą╝ąĄąĮčÅčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ąŠą╗ąČąĄąĮ ąĖą╝ąĄčéčī ąŠą┤ąĖąĮ ą▓ąĄčü, ą░ ą╝ąĄąĮčÅčÅ - ą┤čĆčāą│ąŠą╣. ąó.ąĄ. ą┐čĆąĖ ąĮąĄą║ąŠč鹊čĆąŠą╝ čüąŠąŠčéąĮąŠčłąĄąĮąĖąĖ čŹčéąĖčģ ą▓ąĄčüąŠą▓ (čÅ ą┐ąŠčüą╝ąŠčéčĆčÄ čüą║ąŠą╗čīą║ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čéčĆąĄą▒čāąĄčé ą┐ąŠą▓ąŠčĆąŠčé) čģąŠčćčā ą┐ąŠą╗čāčćąĖčéčī ą╝ą░čĆčłčĆčāčé čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ čćąĖčüą╗ąŠą╝ ą┐ąŠčüąĄčēą░ąĄą╝čŗčģ čāąĘą╗ąŠą▓, ąĘą░č鹥ą╝ - ą╝ą░ąĮąĄą▓čĆąŠą▓, ąĖ, ąĮą░ą║ąŠąĮąĄčå, ą║čĆą░čéčćą░ą╣čłąĖą╣ ą┐ąŠ čĆą░čüčüč鹊čÅąĮąĖčÄ. ąó.ąĄ ą▒ąŠą╗ąĄąĄ ą┤ą╗ąĖąĮąĮčŗą╣ ą┐čāčéčī čü ą╝ąĄąĮčīčłąĖą╝ čćąĖčüą╗ąŠą╝ ą╝ą░ąĮčæą▓čĆąŠą▓ ą╝ąŠąČąĄčé ąŠą║ą░ąĘą░čéčīčüčÅ ąŠą┐čéąĖą╝ą░ą╗čīąĮąĄąĄ, č湥ą╝ ąĮą░ąĖą║čĆą░čéčćą░ą╣čłąĖą╣ ą┐ąŠ čĆą░čüčüč鹊čÅąĮąĖčÄ.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
uldemir
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit)
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé čÅąĮą▓ 10, 2020 08:01:16
ąöčĆčāą│ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
ąźą╝. č鹊ą│ą┤ą░ čāąČ ą┤ąŠčüčéą░č鹊čćąĮąŠ ą┐čĆąŠčüč鹊 čāą┤ą╗ąĖąĮąĮąĖčéčī ą┐čĆąĖą╝čŗą║ą░čÄčēąĄąĄ čĆąĄą▒čĆąŠ. ąØąŠ ą┤ą╗čÅ ą┐ąŠą╗ąĮąŠą│ąŠ X-ąŠą▒čĆą░ąĘąĮąŠą│ąŠ ą┐ąĄčĆąĄą║čĆčæčüčéą║ą░ č湥ą│ąŠ-č鹊 čéą░ą║ ąĮąĄ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ. ą¤ąŠčģąŠąČąĄ, ą┐čĆąŠčēąĄ ą▓ą▓ąĄčüčéąĖ ą▓ą╝ąĄčüč鹊 ąŠą┤ąĮąŠą╣ ą▓ąĄčĆčłąĖąĮčŗ ą┤ą▓ąĄ: ą┤ą╗čÅ ą╝ąĄčĆąĖą┤ąĖą░ąĮą░ą╗čīąĮąŠą│ąŠ ąĖ čłąĖčĆąŠčéąĮąŠą│ąŠ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ ąĖčģ čüąŠąĄą┤ąĖąĮąĖčéčī čĆąĄą▒čĆąŠą╝ ąĖą╝ąĄčÄčēąĖą╝ ą▓ąĄčü ą┐ąŠą▓ąŠčĆąŠčéą░. ą¦ąĄą╝-č鹊 ąĮą░ą┐ąŠą╝ąĮąĖą╗ąŠ čüčģąĄą╝čā ą╝ąĄčéčĆąŠ... čü ą┐ąĄčĆąĄčüą░ą┤ą║ą░ą╝ąĖ ąĮą░ čĆą░ąĘąĮčŗčģ čāčĆąŠą▓ąĮčÅčģ.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
uldemir
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit)
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ čÅąĮą▓ 11, 2020 12:42:44
ąöčĆčāą│ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
ą¤čĆąŠą┤ąŠą╗ąČąĄąĮąĖąĄ ą▒ąŠčĆčīą▒čŗ čü ą¤ąś ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ čā čĆąŠą▒ąŠčéą░ ąĮą░ PSoC. ąÆčüčÄ ąĘą░ą┤čāą╝ą░ąĮąĮčāčÄ čüčģąĄą╝čā ą┤ą╗čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┐ąĄčĆąĖąŠą┤ą░ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ąĖą╝ą┐čāą╗čīčüąŠą▓ čĆą░ąĘąŠą▒čĆą░ą╗. ą¤ąŠč鹊ą╝čā ą║ą░ą║ ąŠąĮą░ ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ąĮą░ą┤ąŠ. ąĀą░ąĘą▒ąĖčĆą░čéčīčüčÅ ą▓ č湥ą╝ ą┐čĆąĖčćąĖąĮą░ ąĮąĄčé ą▓čĆąĄą╝ąĄąĮąĖ, ą┐ąŠčŹč鹊ą╝čā ą┐ąŠčłąĄą╗ ą┐ąŠ ą┐čĆąŠč鹊čĆąĄąĮąĮąŠą╣ ą┤ąŠčĆąŠąČą║ąĄ: čüą▓ąŠą▒ąŠą┤ąĮąŠ ą▒ąĄą│čāčēąĖą╣ čéą░ą╣ą╝ąĄčĆ ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ąĘą░čģą▓ą░čéčā ąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÄ. ą¤čĆąĖčćąĖąĮą░, ą┐ąŠč湥ą╝čā čā ą╝ąĄąĮčÅ PSoC Creator "ąĘą░ą║ą╗ąĖąĮąĖą▓ą░ą╗ąŠ" - ą╝ąŠčÅ ąČą░ą┤ąĮąŠčüčéčī. ąöą╗čÅ ąČčāčĆąĮą░ą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ čüąŠąĘą┤ą░ą╗ ą╝ą░čüčüąĖą▓ ąĖąĘ 5000 菹╗ąĄą╝ąĄąĮč鹊ą▓ ąĖ ą▓čüčéą░ą▓ąĖą╗ ąĖčģ ą▓ Watch. ąÜčĆąĄą░č鹊čĆ ą┐čĆąŠčüč鹊 ąĮąĄ ą╝ąŠą│ ą▒čŗčüčéčĆąŠ ą┐ąĄčĆąĄą▓ą░čĆąĖčéčī čéą░ą║čāčÄ č鹊ą╗ą┐čā čćąĖčüąĄą╗. ąØąŠ čéą░ą║ ą║ą░ą║ č鹥čüčé čā ą╝ąĄąĮčÅ ąĖą┤čæčé 3 čüąĄą║čāąĮą┤čŗ, ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čĆą░ąĘ ą▓ 10ą╝čü (čé.ąĄ. 100 čĆą░ąĘ ą▓ čüąĄą║čāąĮą┤čā), č鹊 čĆąĄą░ą╗čīąĮąŠ ąĮčāąČąĮąŠ ą▓čüąĄą│ąŠ 300 ąŠčéčüč湥č鹊ą▓. ąØčā, ą╗ą░ą┤ąĮąŠ - 313, čéą░ą║ ą║ą░ą║ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čćčāčéčī čćą░čēąĄ - čĆą░ąĘ ą▓ 9.54 ą╝čü. ąÆąĘčÅčéčī čŹč鹊čé ą╝ą░čüčüąĖą▓ ą▓ ą║ą╗ąĖą┐ą▒ąŠą░čĆą┤ čāą┤ąŠą▒ąĮąĄą╣ ą▓čüąĄą│ąŠ ąŠą║ą░ąĘą░ą╗ąŠčüčī ąĖąĘ ąĘą░ą║ą╗ą░ą┤ą║ąĖ Memory, ą░ ą┐ąŠč鹊ą╝ ą┐čĆąŠčüč鹊 ą▒čĆąŠčüą░ą╗ ą▓ 菹╗ąĄą║čéčĆąŠąĮąĮčāčÄ čéą░ą▒ą╗ąĖčåčā:
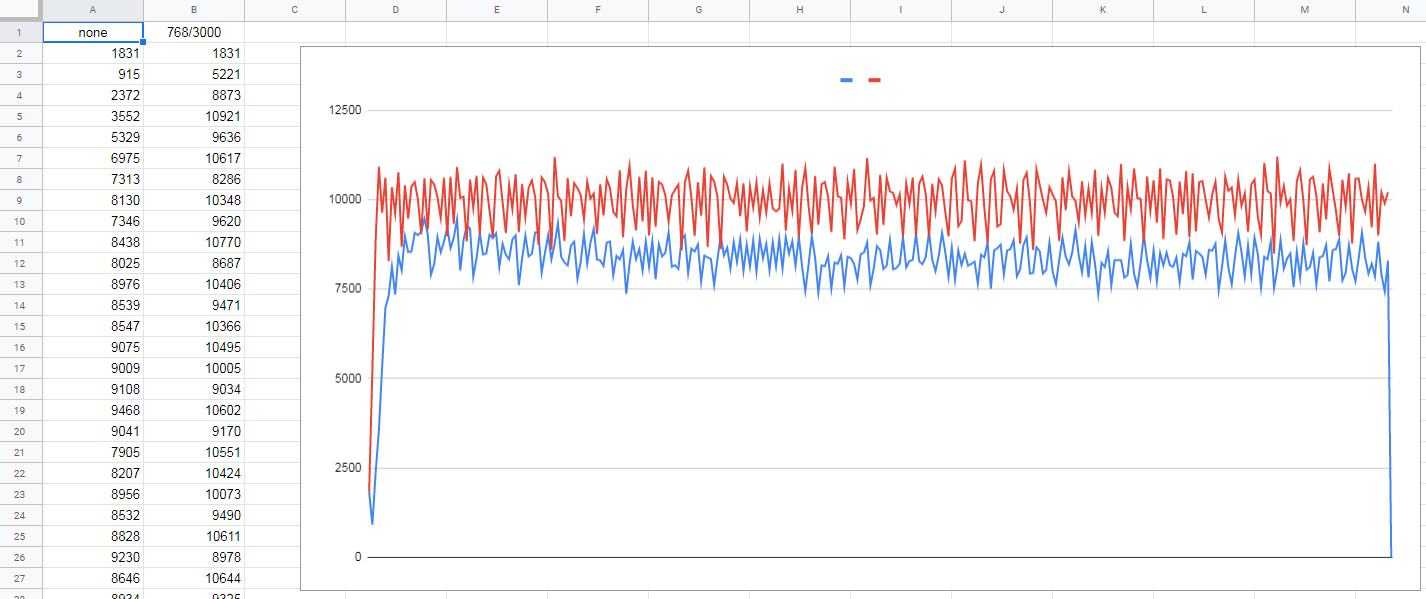
ąÜčĆą░čüąĮą░čÅ ą╗ąĖąĮąĖčÅ čŹč鹊 čĆąĄąĘčāą╗čīčéą░čé čĆą░ą▒ąŠčéčŗ ą¤ąś ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čāą┤ąĄčƹȹĖą▓ą░čÄčēąĄą│ąŠ 1000 rpm. ąĪąĖąĮčÅčÅ ą╗ąĖąĮąĖčÅ - čüą▓ąŠą▒ąŠą┤ąĮąŠąĄ ą▓čĆą░čēąĄąĮąĖąĄ ą╝ąŠč鹊čĆą░ ą┐čĆąĖ, ą┐čĆąĖą╝ąĄčĆąĮąŠ, čéčĆąĄčéąĖ ą┐ąŠą┤ą░ą▓ą░ąĄą╝ąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ. ą¤ąĄčĆą▓čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ 1831 ąĖ 915 - čŹč鹊 ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ rpm - ą║ąŠą╗ąĄčüąŠ ąĖą╗ąĖ čüč鹊ąĖčé ąĮą░ ą╝ąĄčüč鹥 ąĖą╗ąĖ ą▓čĆą░čēą░ąĄčéčüčÅ ą╝ąĄą┤ą╗ąĄąĮąĮąĄąĄ čäąĖą║čüąĖčĆčāąĄą╝čŗčģ ąŠą▒ąŠčĆąŠč鹊ą▓(čģą╝, ą┐ąŠč湥ą╝čā 1831 - čüąĄą╣čćą░čü ąĖčüą┐čĆą░ą▓ą╗čÄ). ą£ąŠąČąĮąŠ ąĘą░ą╝ąĄčéąĖčéčī ą║ą░ą║ čĆą░ąĘą╗ąĖčćą░ąĄčéčüčÅ ą▓čĆąĄą╝čÅ čĆąĄą░ą║čåąĖąĖ čü čĆąĄą│čāą╗čÅč鹊čĆąŠą╝ ąĖ ą▒ąĄąĘ.
p.s. ąØą░ą┐ąĖčüą░ą╗ ąĄčēąĄ ąĖ čāčüčĆąĄą┤ąĮąĄąĮąĖąĄ:
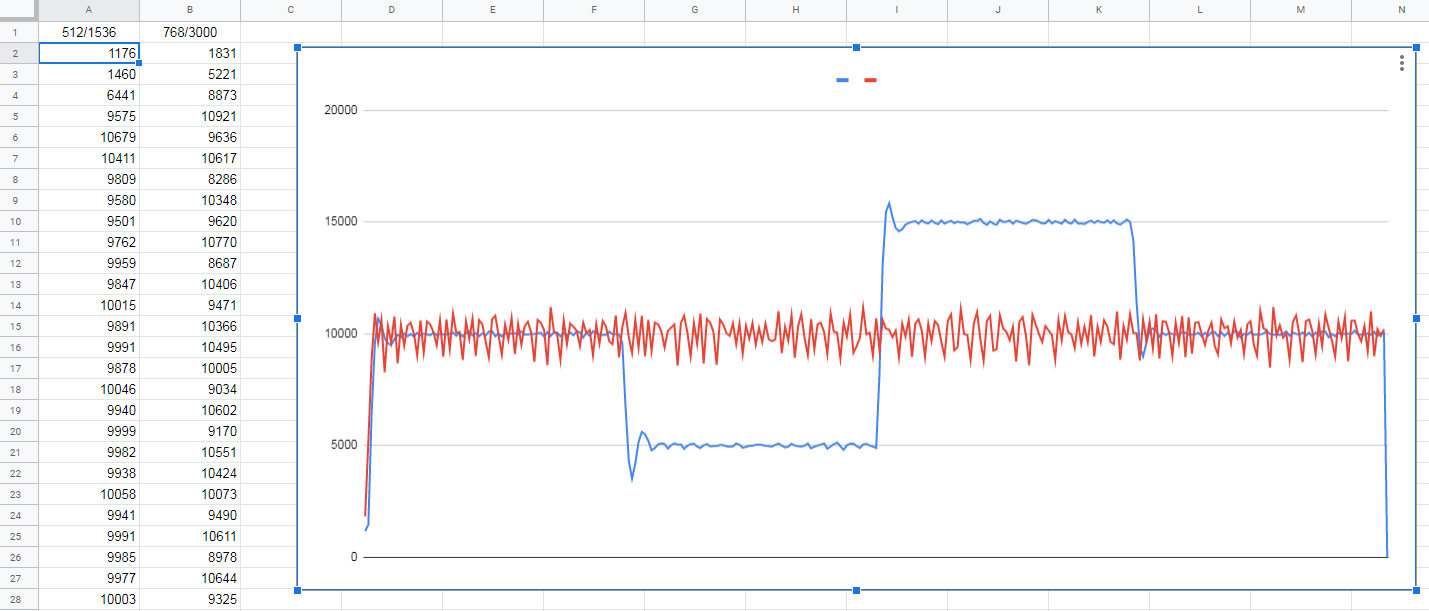
ąÜčĆą░čüąĮą░čÅ ą╗ąĖąĮąĖčÅ - čŹč鹊 č鹥 ąČąĄ čüčéą░čĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ, čćč鹊 ąĖ ąĮą░ ą┐čĆąĄą┤čŗą┤čāčēąĄą╣ ą║ą░čĆčéąĖąĮą║ąĄ, ą░ čüąĖąĮčÅčÅ ą╗ąĖąĮąĖčÅ - čĆąĄąĘčāą╗čīčéą░čé čĆą░ą▒ąŠčéčŗ "čāčüčĆąĄą┤ąĮąĖč鹥ą╗čÅ". ą¤čĆą░ą▓ą┤ą░, ą┐čĆąĖčłą╗ąŠčüčī čāą╝ąĄąĮčīčłąĖčéčī ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ ąĖąĮč鹥ą│čĆą░ą╗čīąĮąŠą╣ ąĖ ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮąŠą╣ čüąŠčüčéą░ą▓ą╗čÅčÄčēąĄą╣, ąĖąĮą░č湥 ą┐ąŠčüą╗ąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąŠą▒ąŠčĆąŠč鹊ą▓ - ąŠąĮąĖ ą┤ąŠą╗ą│ąŠ ą║ąŠą╗ąĄą▒ą░ą╗ąĖčüčī čü ą▒ąŠą╗čīčłąŠą╣ ą░ą╝ą┐ą╗ąĖčéčāą┤ąŠą╣, ą┐ąŠą║ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ą╗ąĖčüčī ąĘą░ą┤ą░ąĮąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ. ąØčā ąĖ čÅ ąĮąĄą╝ąĮąŠą│ąŠ čĆą░ąĘąĮąŠąŠą▒čĆą░ąĘąĖą╗ č鹥čüčé - č鹥ą┐ąĄčĆčī ą╝ąŠč鹊čĆ ą║čĆčāčéąĖčé ą║ąŠą╗ąĄčüąŠ čü ąŠą▒ąŠčĆąŠčéą░ą╝ąĖ 1000, 500, 1500 ąĖ 1000 rpm ą┐ąŠ 0.75 čüąĄą║čāąĮą┤.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
uldemir
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit)
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé čÅąĮą▓ 17, 2020 20:51:13
ąöčĆčāą│ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
ąæčŗčüčéčĆąŠ ą┐čĆąŠčćąĖčéą░ą╗ ąÆą░čłčā čüčéą░čéčīčÄ ą┐čĆąŠ čüąĖą╗ą░ą▒ąŠą▓čüą║ąĖą╣ Bluetooth. ąóąĄą┐ąĄčĆčī ąĮąĄą║ąŠč鹊čĆčŗąĄ ą╝ąŠą╝ąĄąĮčéčŗ čü čüąĄą║čÄčĆąĮąŠčüčéčīčÄ čüčéą░ą╗ąĖ ą┐ąŠąĮčÅčéąĮčŗ. ąØąŠ, čćč鹊ą▒čŗ ą┐ąŠą▓č鹊čĆąĖčéčī ąĮą░ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī - čüčéčĆą░čłąĮąŠ ą┤ąŠčĆąŠą│ąĖąĄ čŹčéąĖ ą║ąŠą╝ą┐ą╗ąĄą║čéčŗ. ąźąŠčéčÅ čüą░ą╝ ą┐ąŠ čüąĄą▒ąĄ ą╝ąŠą┤čāą╗čī BGM13P ą┤ąŠčüčéą░č鹊čćąĮąŠ ą┤ąĄčłčæą▓. ąÆąŠčé ąĄčüčéčī ą╝čŗčüą╗čī, ąĄčüą╗ąĖ čā ą╝ąĄąĮčÅ ą┐ąŠą╗čāčćąĖčéčüčÅ ą┐ąŠą╗čāčćąĖčéčī ą┐čĆąĖąĄą╝ą╗ąĄą╝čāčÄ čüą║ąŠčĆąŠčüčéčī čĆąŠą▒ąŠčéčā ąĮą░ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖąĖ ą╗ąĖąĮąĖąĖ, č鹊 čüą╗ąĄą┤čāčÄčēąĖą╣ ąĮą░ą┤ąŠ ą▒čāą┤ąĄčé čüą┤ąĄą╗ą░čéčī čāąČąĄ čü čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą┐ąŠą╗ąĮąŠčüčéčīčÄ č湥čĆąĄąĘ bluetooth.
ąÆčĆąĄą╝čÅ ą┐čĆąŠą▓ąŠą┤ąĖą╝ąŠąĄ ą▓ ą┐ąŠąĄąĘą┤ąĄ ą┐ąŠčéčĆą░čéąĖą╗ ąĮą░ ą░ą┤ą░ą┐čéą░čåąĖčÄ OLED ą┤ąĖčüą┐ą╗ąĄčÅ ąĮą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ SH1106. ąöą░, ą║ąŠą╣-ą║ą░ą║ąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ čüąŠą▓ą┐ą░ą┤ą░čÄčé čü SSD1306, ąĮąŠ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą╝ąŠą╝ąĄąĮčéčŗ ąĮąĄ čüąŠą▓ą┐ą░ą┤ą░čÄčé. ąöą░ą╗ąĄąĄ ąŠčåąĖčäčĆąŠą▓ą░ąĮąĮčŗą╣ ą╗ą░ą▒ąĖčĆąĖąĮčé ąĘą░ą┐ąĖčüą░ą╗ ą▓ ą┐ą░ą╝čÅčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░:
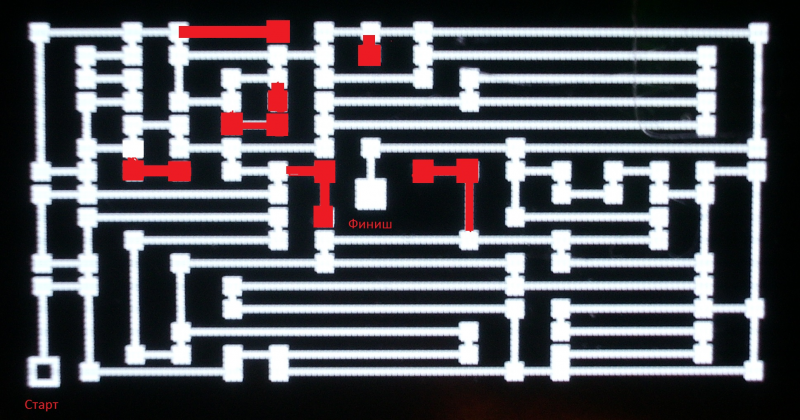
ąÜčĆą░čüąĮčŗą╝ čÅ ąŠčéą╝ąĄčéąĖą╗ čéčāą┐ąĖą║ąŠą▓čŗąĄ ą▓ąĄčéą▓ąĖ. ąÆąŠąŠą▒čēąĄ-č鹊 ą╗ą░ą▒ąĖčĆąĖąĮčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī "ą║ą▓ą░ą┤čĆą░čéąĮčŗą╝", ą┐čĆąŠčüč鹊 ąĄą│ąŠ čĆą░čüčéčÅąĮčāą╗ąŠ ą▓ąŠ ą▓ąĄčüčī 菹║čĆą░ąĮ. ąÆąŠąĘą╝ąŠąČąĮąŠ, ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą╝ą░čüčłčéą░ą▒ąĖčĆąŠą▓ą░ąĮąĖčÅ čüą╗ąĄą┤čāąĄčé čüą┤ąĄą╗ą░čéčī ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ ąĖ ą┐ąŠ-ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗ąĖ, ąĖ ą┐ąŠ-ą▓ąĄčĆčéąĖą║ą░ą╗ąĖ. ąØą░ą┐ąĖčüą░ą╗ ą┐ąĄčĆą▓čāčÄ čćą░čüčéčī ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ąöąĄą╣ą║čüčéčĆčŗ - ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ ą║čĆą░čéčćą░ą╣čłąĖčģ čĆą░čüčüč鹊čÅąĮąĖą╣. ą£ąĮąĄ, ą▓ąŠąĘą╝ąŠąČąĮąŠ, ą┐ąŠą║ą░ąĘą░ą╗ąŠčüčī, ąĮąŠ čäąĖąĮąĖčł - čŹč鹊 čüą░ą╝ą░čÅ čāą┤ą░ą╗čæąĮąĮą░čÅ č鹊čćą║ą░ ąŠčé čüčéą░čĆčéą░. ąÆąŠ ą▓čüčÅą║ąŠą╝ čüą╗čāčćą░ąĄ, ą┐čĆąŠčüą╝ąŠčéčĆąĄą▓ ą╝ą░čüčüąĖą▓ čĆą░čüčüč鹊čÅąĮąĖą╣ čÅ ąĮąĖą│ą┤ąĄ ąĮąĄ čāą▓ąĖą┤ąĄą╗ čćąĖčüą╗ą░ ą▒ąŠą╗čīčłąĄ, č湥ą╝ ą▓ čäąĖąĮąĖčłąĮąŠą╝ čāąĘą╗ąĄ. ąØąŠ, čŹč鹊 ą┐ąŠą║ą░ čÅ ąĄčēąĄ ąĮąĄ ą▓ą▓čæą╗ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ "čüč鹊ąĖą╝ąŠčüčéąĖ" ą┐čĆąŠčģąŠą┤ą░ č湥čĆąĄąĘ čāąĘąĄą╗ ą┐čĆčÅą╝ąŠ ąĖ čü ą┐ąŠą▓ąŠčĆąŠč鹊ą╝. ąÆč鹊čĆą░čÅ čćą░čüčéčī, ąĮą░ ąŠčüąĮąŠą▓ąĄ čŹč鹊ą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ (ą║čĆą░čéčćą░ą╣čłąĖčģ čĆą░čüčüč鹊čÅąĮąĖą╣), ąĮą░ą┤ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą║čĆą░čéčćą░ą╣čłąĖą╣ ą╝ą░čĆčłčĆčāčé. ąŁč鹊 ąĮą░ą┤ąŠ ą┤ąĄą╗ą░čéčī čü čäąĖąĮąĖčłąĮąŠą╣ č鹊čćą║ąĖ - ąĖčüą║ą░čéčī ą▓ ąŠą║čĆčāą│ąĄ čāąĘą╗čŗ čü ą╝ąĄąĮčīčłąĖą╝ čĆą░čüčüč鹊čÅąĮąĖąĄą╝, č湥ą╝ ą▓ č鹥ą║čāčēąĄą╝ čāąĘą╗ąĄ, ąĮą░ ą▓ąĄą╗ąĖčćąĖąĮčā čĆą░čüčüč鹊čÅąĮąĖčÅ ą╝ąĄąČą┤čā čāąĘą╗ą░ą╝ąĖ. ąÉ ą┐ąŠč鹊ą╝ ąĮą░ą┤ąŠ ą▒čāą┤ąĄčé čŹč鹊čé ą┐čāčéčī "čĆą░ąĘą▓ąĄčĆąĮčāčéčī" ąĘą░ą┤ąŠą╝ ąĮą░ą┐ąĄčĆčæą┤. ąØąŠ čÅ čéčāčé ą┐ąŠą┤čāą╝ą░ą╗, čćč鹊 čÅ ą╝ąŠą│čā ąĖčüą║ą░čéčī ą║čĆą░čéčćą░ą╣čłąĖąĄ čĆą░čüčüč鹊čÅąĮąĖčÅ ąŠčé čäąĖąĮąĖčłą░ ą┤ąŠ čüčéą░čĆčéą░ ąĖ č鹊ą│ą┤ą░ ą┐čāčéčī čāąČąĄ čüčĆą░ąĘčā ą▒čāą┤ąĄčé ą│ąŠč鹊ą▓ ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÄ.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
uldemir
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit)
ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ čÅąĮą▓ 18, 2020 16:27:53
ąöčĆčāą│ ąÜąŠčéą░
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
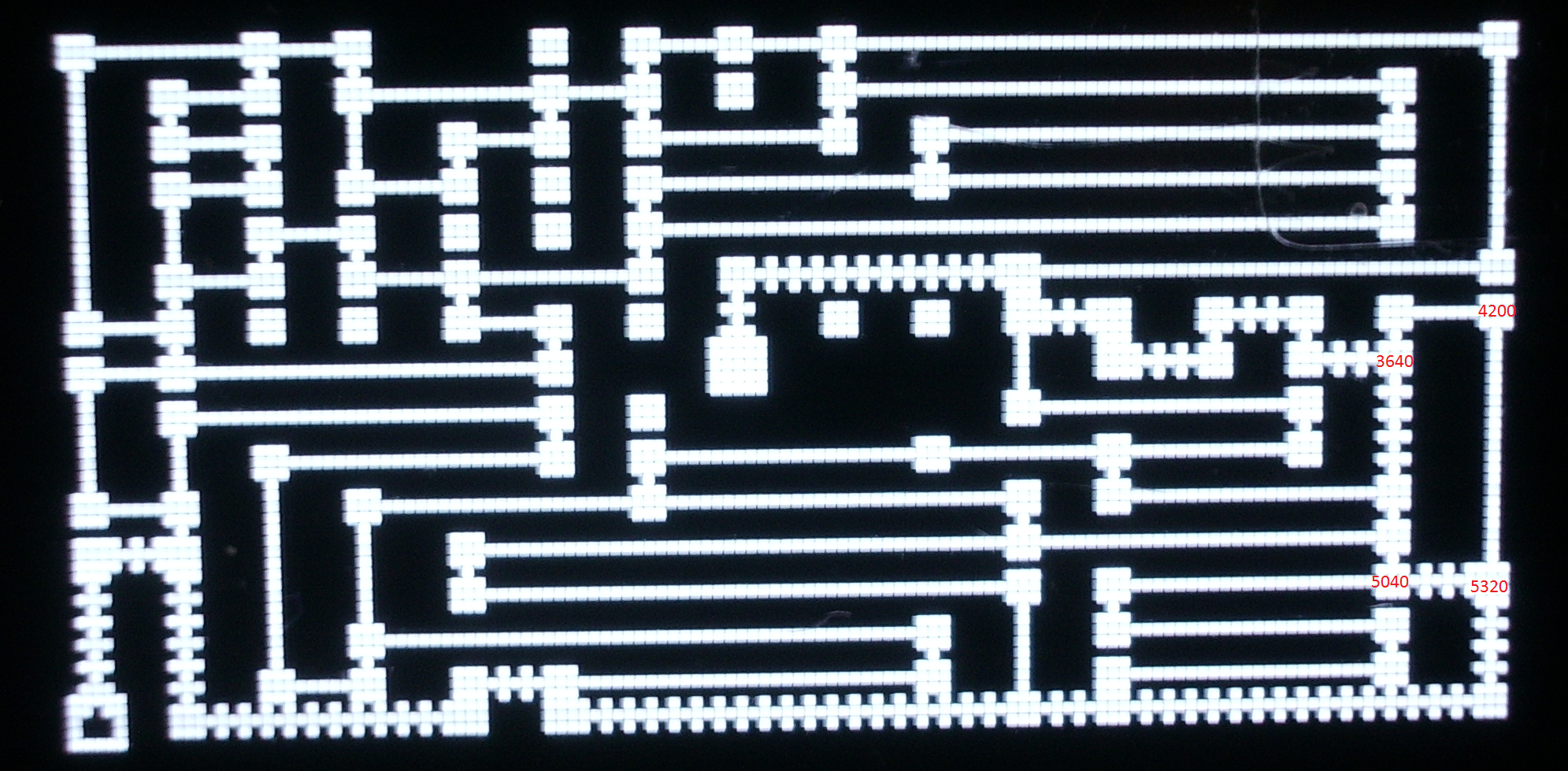
ąśąĘ č鹥ąŠčĆąĖąĖ, čÅ ą┐ąŠąĮčÅą╗, čćč鹊 ąĄčüą╗ąĖ ąĄčüčéčī ą║ą░čĆčéą░ čĆą░čüčüč鹊čÅąĮąĖą╣ ą┤ąŠ "ąĮčāą╗ąĄą▓ąŠą╣" ą▓ąĄčĆčłąĖąĮčŗ, č鹊 ąĄčæ ą╝ąŠąČąĮąŠ ąŠą║čĆąĄčüčéąĖčéčī "ą║ą░čĆč鹊ą╣ ą▓čŗčüąŠčé", č鹊 ąĮčāąČąĮąŠ ą┐ąŠ čŹč鹊ą╣ ą║ą░čĆč鹥 ą┐čĆąŠčüč鹊 čüą║ą░čéčŗą▓ą░čéčīčüčÅ ą▓ąĮąĖąĘ ą┐ąŠ čüą░ą╝čŗą╝ ą║čĆčāčéčŗą╝ ą│čĆą░ąĮčÅą╝.
ąÆąŠčé čĆąĄąĘčāą╗čīčéą░čé čĆą░ą▒ąŠčéčŗ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ - ąĮą░ą╣ą┤ąĄąĮąĮčŗą╣ ą║čĆą░čéčćą░ą╣čłąĖą╣ ą┐čāčéčī. ąĪą┐čĆą░ą▓ą░, ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čāąĘą╗ą░čģ čÅ ąĮą░ą┐ąĖčüą░ą╗ ąĘąĮą░č湥ąĮąĖąĄ čĆą░čüčüč鹊čÅąĮąĖą╣ ą┤ą╗čÅ ą┐čĆąĖą╝ąĄčĆą░. ąś ą▓ąŠčé, čüą║ą░ąČąĄą╝ čÅ ą┤ąŠą▒čĆą░ą╗čüčÅ ą┤ąŠ čāąĘą╗ą░ ą┐ąŠą╝ąĄč湥ąĮąĮąŠą│ąŠ 5320. ą×čé ąĮąĄą│ąŠ ąĄčüčéčī ą┤ą▓ąĄ ą┤ąŠčĆąŠą│ąĖ "ą▓ąĮąĖąĘ": ąĮą░ č鹊čćą║čā 4200 ąĖ 5040. ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą▓čŗą▒čĆą░ą╗ą░ 5040, ą░ ąĮąĄ ą▒ąŠą╗ąĄąĄ ąĮąĖąĘą║čāčÄ 4200. ąóą░ą║ ą║ą░ą║ 4200 ą▓čüąĄą│ąŠ ąĮą░ 4 ą║ą╗ąĄč鹊čćą║ąĖ ąĮąĖąČąĄ (čéą░ą║ ą║ą░ą║ čÅ čüą┤ąĄą╗ą░ą╗ ą┤ą╗ąĖąĮčā ąŠą┤ąĮąŠą╣ ą║ą╗ąĄč鹊čćą║ąĖ 280), ąĮąŠ ą┤ąŠ ąĮąĄčæ ąĮą░ą┤ąŠ ąĖą┤čéąĖ čåąĄą╗čŗčģ 6 ą║ą╗ąĄč鹊č湥ą║. ąÆ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ 5040 ąĮąĖąČąĄ ąĮą░ ąŠą┤ąĮčā ą║ą╗ąĄč鹊čćą║čā ąĖ ąĖą┤čéąĖ ą┤ąŠ ąĮąĄčæ č鹊ąČąĄ č鹊ą╗čīą║ąŠ ąŠą┤ąĮčā ą║ą╗ąĄč鹊čćą║čā (ąĮąĄ ąĘą░ą▒čŗą▓ą░ąĄą╝, čćč鹊 ą║ą░čĆčéąĖąĮą║ą░ čĆą░čüčéčÅąĮčāčéą░ ą┐ąŠ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗ąĖ. Aspect ratio 2:1). ąÆ ąŠą▒čēąĄą╝, čÅ ą┐ąŠą║ą░ čĆąĄąĘčāą╗čīčéą░č鹊ą╝ ą┤ąŠą▓ąŠą╗ąĄąĮ. ąóąĄą┐ąĄčĆčī ąĮą░ą┤ąŠ ą▓ čŹč鹊čé ą║ąŠą┤ ą▓čüčéčĆąŠąĖčéčī ą▓ąĄčü ą┐čĆąŠčģąŠą┤ą░ č湥čĆąĄąĘ čāąĘąĄą╗ ą┐čĆčÅą╝ąŠ ąĖ čü ą┐ąŠą▓ąŠčĆąŠč鹊ą╝. ąóąŠą│ą┤ą░ čāą▓ąĖą┤ąĖą╝, čćč鹊 ąŠą┐čéąĖą╝ą░ą╗čīąĮčŗą╝ ą╝ąŠąČąĄčé ąŠą║ą░ąĘą░čéčīčüčÅ ą┤čĆčāą│ąŠą╣ ą╝ą░čĆčłčĆčāčé.
ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ
ąĪčéčĆą░ąĮąĖčåą░ 6 ąĖąĘ 14
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 265 ]
... , , , , , , ...
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: ąĮąĄčé ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ ąĖ ą│ąŠčüčéąĖ: 13
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ











")
")
")