|
ążąŠčĆčāą╝ ąĀą░ą┤ąĖąŠąÜąŠčé • ą¤čĆąŠčüą╝ąŠčéčĆ č鹥ą╝čŗ - RSLK ąŠčé TI (Robotic System Learning Kit)
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠčéą▓ąĄč鹊ą▓ | ąÉą║čéąĖą▓ąĮčŗąĄ č鹥ą╝čŗ
 
|
ąĪčéčĆą░ąĮąĖčåą░ 8 ąĖąĘ 14
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 265 ] |
... , , , , , , ... |
| ąÉą▓č鹊čĆ |
ąĪąŠąŠą▒čēąĄąĮąĖąĄ |
Ser60

|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit)  ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé ą╝ą░ą╣ 08, 2020 19:30:26 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 74
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 607
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą┤ąĄą║ 24, 2008 09:58:58
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3715
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 3
")
")
")
|
|
ąöą░, čéą░ą╣ą╝ąĄčĆąŠą▓ čā EFM32 ą╝ąĄąĮčīčłąĄ, č湥ą╝, ąĮą░ą┐čĆąĖą╝ąĄčĆ, čā ST. ą×ą┤ąĮą░ą║ąŠ, ąĄčüą╗ąĖ ąĮčāąČąĄčé čüąĖąĮčģčĆąŠąĮąĮčŗą╣ ąĘą░čģą▓ą░čé, č鹊 ąĄą│ąŠ ą╗ąĄą│ą║ąŠ ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░čéčī čü ą┐ąŠą╝ąŠčēčīčÄ ą╝ąŠą┤čāą╗čÅ PRS. ąÜąĖčéčŗ ąĖčģ čüč鹊čÅčé ą┤ąŠčĆąŠą│ąŠ, ąĮą░ą▓ąĄčĆąĮąŠąĄ, ą┐ąŠč鹊ą╝čā, čćč鹊 ąĮą░ ąĮąĖčģ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ čāąĮąĖą║ą░ą╗čīąĮą░čÅ čüąĖčüč鹥ą╝ą░ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ č鹊ą║ą░. ąÆą╝ąĄčüč鹊 ąÜąĖč鹊ą▓ ą┤ąĄčłąĄą▓ą╗ąĄ ą┐čĆąŠčüč鹊 čĆą░čüą┐ą░čÅčéčī ą£ąÜ ąĮą░ čüą▓ąŠąĄą╣ ą┐ą╗ą░č鹥.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
 |
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
uldemir
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ ą╝ą░ą╣ 11, 2020 07:40:06 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214
ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
")
|
|
ą¤ąŠ ąŠą▒čēąĖą╝ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝, EFM ą┐ąŠčćčéąĖ čüąŠą▓ą┐ą░ą┤ą░ąĄčé čü MSP432. ąóąŠąČąĄ 4 čéą░ą╣ą╝ąĄčĆą░, č鹊ą╗ą┐ą░ UART/USART, 48ą£ąōčå čéą░ą║č鹊ą▓ą░čÅ... ąØąŠ, čā č鹥čģ ą║čĆąĖčüčéą░ą╗ą╗ąŠą▓, ąĮą░ ą║ąŠč鹊čĆčŗąĄ čÅ ąĮą░čåąĄą╗ąĖą▓ą░ą╗čüčÅ (Giant Gecko ą▓ ą╗ąĄą│ą║ąŠą┐ą░čÅą▒ąĄą╗čīąĮąŠą╝ ą║ąŠčĆą┐čāčüąĄ ąĖ ą┐ąŠ-ą┤ąĄčłąĄą▓ą╗ąĄ) čā čéą░ą╣ą╝ąĄčĆąŠą▓ ą▓čüąĄą│ąŠ ą┐ąŠ 2 ą║ą░ąĮą░ą╗ą░ ąĘą░čģą▓ą░čéą░ (ąĖ ąŠčéčüčāčéčüčéą▓ąĖąĄ PRS). ąŚą░č鹊 ąĄčüčéčī ą╝ąŠą┤čāą╗čī AES. ąóą░ą║ čćč鹊 ą┐ąŠą║ą░ ąĮąĄ ąĮą░čłąĄą╗, č湥ą│ąŠ-ąĮąĖą▒čāą┤čī, čćč鹊 ą╝ąĄąĮčÅ ą▒čŗ ą▓ ąĮąĖčģ ą┐čĆąĖą▓ą╗ąĄą║ą╗ąŠ.
ąÜčüčéą░čéąĖ, čćč鹊 ą╝ąĄąĮčÅ ą┐čĆąĖą▓ą╗ąĄą║ą░ąĄčé ą▓ MSP - čĆąĄą│ąĖčüčéčĆčŗ xxxIV - interrupt vector. ą×č湥ąĮčī ąŠą▒ą╗ąĄą│čćą░čÄčé čĆą░ą▒ąŠčéčā ą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅčģ. ąŁč鹊 čÅ ą┐čĆąŠčćčāą▓čüčéą▓ąŠą▓ą░ą╗, ą║ąŠą│ą┤ą░ ą┐ąĄčĆąĄą┐ąĖčüčŗą▓ą░ą╗ ą┤čĆą░ą╣ą▓ąĄčĆ ą┐ąŠą┤ STM - čéą░ą╝ ą╝ąĮąĄ ąĄą│ąŠ ąŠč湥ąĮčī ąĮąĄ čģą▓ą░čéą░ą╗ąŠ.
ąÉ čéčāčé čüą▒čŗą╗ą░čüčī ą╝ąĄčćčéą░. ąÆčüčæ ą▓čĆąĄą╝čÅ ą╝čāčćą░ą╗čüčÅ ą▓ąŠą┐čĆąŠčüąŠą╝, ą║ą░ą║ ąĮąĄ ą┤ąŠą┐čāčüčéąĖčéčī ą┐ąĄčĆąĄčĆą░ąĘčĆčÅą┤ą░ ą▒ą░čéą░čĆąĄąĖ. ąśąĘą▓ąĄčüčéąĮąŠ, čćč鹊 LiPo ą░ą║ą║ą░ą╝čāą╗čÅč鹊čĆčŗ ąŠč湥ąĮčī ąĮąĄ ą╗čÄą▒čÅčé čŹč鹊ą│ąŠ. ąØąŠ ą▓ąŠčé ą║ąŠą│ą┤ą░ ą┤ąĄą╗ą░ą╗ ą┐ą╗ą░čéčā ą┤ą╗čÅ ąĮąŠą▓ąŠą│ąŠ Linefollower, ą┤čāą╝ą░ą╗, čćč鹊 ąĮą░ą┤ąŠ ą▒čŗ... ą┤ą░ ą▓ąŠčé č鹊ą╗čīą║ąŠ ą▓čüąĄ ą▓čģąŠą┤čŗ ąÉą”ą¤ čāąČąĄ ą▒čŗą╗ąĖ ąĘą░ąĮčÅčéčŗ. ąŚą░č鹊 čā čĆąŠą▒ąŠčéą░ ąĮą░ MSP432 (čģąŠčéčī čéą░ą╝ ąĮąĄ LiPo, ą░ NiMH) ą┤ą╗čÅ ą╗ą░ą▒ąĖčĆąĖąĮčéą░ ąÉą”ą¤ ą▓čüčæ ąĄčēąĄ ąĮąĄ ąĘą░ąĮčÅč鹊, ąĖ ą┐ąŠč湥ą╝čā ą▒čŗ ąĮąĄ čüą┤ąĄą╗ą░čéčī ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮą░ ą▒ą░čéą░čĆąĄąĄ? ąÜąŠąĮąĄčćąĮąŠ, čüąŠ čüą▓ąŠą▒ąŠą┤ąĮčŗą╝ąĖ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ čā RSLK-MAX čāąČąĄ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ąĮą░ą┐čĆčÅąČąĮąŠ, ąĮąŠ, ą┐ąŠą║ą░ ą┤ą╗čÅ ąŠą▒ą╗ąĄą│č湥ąĮąĖčÅ ąČąĖąĘąĮąĖ, čÅ čĆąĄčłąĖą╗ ąĮą░ą│ą╗ąŠ ą▓ąŠčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓čģąŠą┤ąŠą╝ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮąŠą╣ ą┤ą╗čÅ "čĆčāą║ąĖ" (ą┐ąŠč鹊ą╝čā ą║ą░ą║ ąĮąĄ ą▓ąĖąČčā, čćč鹊ą▒čŗ ą▓ curriculum ą┐ąŠčÅą▓ąĖą╗ąĖčüčī ą▒čŗ ą╗ąĄą║čåąĖąĖ ą┐ąŠčüą▓čÅčēąĄąĮąĮčŗąĄ čŹč鹊ą╣ č鹥ą╝ąĄ). ąóą░ą║ ą║ą░ą║ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą▒ą░čéą░čĆąĄąĖ 7-8-9 ą▓ąŠą╗čīčé, ą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąŠą┤ą░ą▓ą░ąĄą╝ąŠąĄ ąĮą░ ą▓čģąŠą┤ ąÉą”ą¤ - 3.3ą▓ (ą▓ ą║ą░č湥čüčéą▓ąĄ ąŠą┐ąŠčĆčŗ ą▒čāą┤čā ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ), č鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ ą┤ąĄą╗ąĖč鹥ą╗čī. ąöąĄą╗ąĖč鹥ą╗čī čĆąĄčłąĄąĮąŠ ą▒čŗą╗ąŠ ą┐čĆąĖą╝ąĄąĮąĖčéčī 1:3 - č鹊ą│ą┤ą░ ą▓ąĄčĆčģąĮčÅčÅ ą│čĆą░ąĮąĖčåą░ ą▒čāą┤ąĄčé 10ą▓. ąÉ ą▓ąŠčé ąĖąĘ ą║ą░ą║ąĖčģ ąĮąŠą╝ąĖąĮą░ą╗ąŠą▓ ą┤ąĄą╗ą░čéčī čŹč鹊čé ą┤ąĄą╗ąĖč鹥ą╗čī? ąó.ąĄ. ą║ą░ą║ąŠąĄ ą▓čŗčģąŠą┤ąĮąĖąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ čŹč鹊ą│ąŠ ą┤ąĄą╗ąĖč鹥ą╗čÅ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī? ą×ą┐čŗčéą░ čā ą╝ąĄąĮčÅ ą▓ čéą░ą║ąĖčģ ą┤ąĄą╗ą░čģ ąŠčüąŠą▒ąŠ ąĮąĄčé. ąÜą░ą║-č鹊 čĆą░ąĘ ą┤ąĄą╗ą░ą╗ čäąĖčĆą╝ą▓ą░čĆčī ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ąóą░ą╝ ąĮčāąČąĮąŠ ą▒čŗą╗ąŠ ą║ąŠąĮčéčĆąŠą╗ąĖčĆąŠą▓ą░čéčī ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ čĆąĄąĘąĄčĆą▓ąĮąŠą╣ ą▒ą░čéą░čĆąĄąĖ cr2032. ą×ąĮą░ ą┐ąŠą┤ą║ą╗čÄčćą░ą╗ą░čüčī č湥čĆąĄąĘ 1 ą£ąŠą╝ ąĖ ą┐ąŠą▓č鹊čĆąĖč鹥ą╗čī ąĮą░ ą×ąŻ ą║ ąÉą”ą¤. ąÉ čéčāčé ąĖąĘ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąÉą”ą¤ ąĄčüčéčī č鹊ą╗čīą║ąŠ 15ą┐ąż ąĖ 300 ąŠą╝. ąØčā, čüą╝ąĄčģą░ ą┤ą╗čÅ čĆąĄčłąĖą╗ ą┤ą╗čÅ ąĮą░čćą░ą╗ą░ ą▓ąĘčÅčéčī 100 ąĖ 200 ą║ąĖą╗ąŠąŠą╝. ąØąŠ čéą░ą║ąŠą╣ ą┐ą░čĆčŗ ąĮąĄ ąĮą░čłąĄą╗ - ą┐čĆąĖčłą╗ąŠčüčī ąĮą░ą┐ą░čÅčéčī 1 ą╝ąĄą│ą░ąŠą╝ ąĖ 470 ą║ąĖą╗ąŠąŠą╝. ąśąĘą╝ąĄčĆąĖą╗ č鹥čüč鹥čĆąŠą╝ ą┤ąĄą╗ąĖč鹥ą╗čī: 7.50ą▓ ą┐ąŠčüą╗ąĄ ą┤ąĄą╗ąĖč鹥ą╗čÅ ą┤ą░ą╗ąĖ 2.32 - ą┐čĆąĖą╝ąĄčĆąĮąŠ ą┐ąŠčģąŠąČąĄ.
ąóąĄą┐ąĄčĆčī, ą┤čāą╝ą░čÄ, ąĮą░ą┤ąŠ ąĘą░ąĮčÅčéčīčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ čćą░čüčéčīčÄ. ąĪ ąÉą”ą¤ čāąČąĄ čĆą░ą▒ąŠčéą░ą╗, ą║ąŠą│ą┤ą░ ą┤ąĄą╗ą░ą╗ 15-čÄ ą╗ą░ą▒ąŠčĆą░č鹊čĆąĮčāčÄ čĆą░ą▒ąŠčéčā "Data acquisition". ąóą░ą╝ ą┐čĆąĖ ą┐ąŠą╝ąŠčēąĖ ąÉą”ą¤ čüčćąĖčéčŗą▓ą░ą╗ą░čüčī ąĖąĮč乊čĆą╝ą░čåąĖčÅ čü čüąĄąĮčüąŠčĆąŠą▓ ą┤ąĖčüčéą░ąĮčåąĖąĖ. ąØą░čćą░ą╗ ąĖąĘčāčćą░čéčī, čćč鹊 čéą░ą╝ ą▒čŗą╗ ą┐ąŠąĮą░ą┐ąĖčüą░ą▓čłąĖ. ą×ą║ą░ąĘą░ą╗ąŠčüčī, ą┤ą╗čÅ ą┐ąĄčĆąĖąŠą┤ąĖčćąĮąŠą│ąŠ ąĘą░ą┐čāčüą║ą░ ąÉą”ą¤ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąŠčüčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé čéą░ą╣ą╝ąĄčĆą░... ą▓ ą║ąŠč鹊čĆąŠą╝ "ą▓čĆčāčćąĮčāčÄ" ą┤ąĄą╗ą░ą╗čüčÅ ąĘą░ą┐čāčüą║ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ąĖ ą▓ čåąĖą║ą╗ąĄ ąŠąČąĖą┤ą░ą╗ąŠčüčī ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĄ čĆąĄąĘčāą╗čīčéą░čéą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ. ąÜą░ą║ąŠą╣ čāąČąŠčü! ąó.ąĄ. čĆąĄą░ą╗čīąĮąŠ - ą▒ąĄąĘ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąöą╗čÅ ą╗ą░ą▒čŗ čŹč鹊 čüąŠą╣ą┤čæčé, ąĮąŠ ą┤ą╗čÅ čüąĄčĆčīčæąĘąĮąŠą╣ čĆą░ą▒ąŠčéčŗ - ąĮąĖą║čāą┤ą░ ąĮąĄ ą│ąŠą┤ąĖčéčüčÅ. ąĀą░ąĘčāą╝ąĄąĄčéčüčÅ, čÅ ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░ą╗ ą┤ąĄą╗ą░čéčī ąĮąĄ ąŠą┤ąĖąĮ ąŠčéčüč湥čé, ą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ, čü ą║ą░ą║ąĖą╝-ą╗ąĖą▒ąŠ ą┐ąĄčĆąĖąŠą┤ąŠą╝ ąĖ ąĄčēąĄ ą┐čĆąŠą┐čāčüą║ą░čéčī čĆąĄąĘčāą╗čīčéą░čé č湥čĆąĄąĘ ążąØą¦, ą┐ąŠčŹč鹊ą╝čā ą╝ąĄąĮčÅ ąĖąĮč鹥čĆąĄčüąŠą▓ą░ą╗ąŠ, ą║ą░ą║ ąĘą░ą┐čāčüą║ą░čéčī ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ąĖ ą║ą░ą║ ą┐ąŠč鹊ą╝ ą┐ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÄ čüčćąĖčéčŗą▓ą░čéčī ą┐ąŠą║ą░ąĘą░ąĮąĖčÅ. ą¤čĆąŠą▒ą╗ąĄą╝ą░ ą▓ č鹊ą╝, čćč鹊 čüą▓ąŠą▒ąŠą┤ąĮčŗčģ čéą░ą╣ą╝ąĄčĆąŠą▓ ą▒ąŠą╗čīčłąĄ ąĮąĄčé, ą┐ąŠčŹč鹊ą╝čā ąĮą░ą┤ąŠ ą▒čŗ ą┐čĆąĖą▓čÅąĘą░čéčīčüčÅ ą║ ą║ą░ą║ąŠą╝čā-ąĮąĖą▒čāą┤čī ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąŠą╝čā ą┐čĆąŠčåąĄčüčüčā. ą¤ąŠčüą╝ąŠčéčĆąĄą╗, ąŠčéą║čāą┤ą░ ą╝ąŠąČąĮąŠ ąĘą░ą┐čāčüą║ą░čéčī ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ. ąŁč鹊 ąĮčāąČąĮąŠ čüą╝ąŠčéčĆąĄčéčī ą▓ ą┤ą░čéą░čłąĖč鹥 ąĮą░ ą║ąŠąĮą║čĆąĄčéąĮčŗą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ. ąÆ MSP432p401r ą╝ąĮąĄ ą┐ąŠą║ą░ąĘą░ą╗ąŠčüčī čāą┤ąŠą▒ąĮčŗą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī TA2.2 (Timer_A2, CCR2). ąóą░ą║ čćč鹊 ą┐ąĄčĆąĖąŠą┤ ąŠą┐čĆąŠčüą░ ą┐ąŠą╗čāčćąĖą╗čüčÅ 2.5ą╝čü - 400 čĆą░ąĘ ą▓ čüąĄą║ąĮą┤čā. ą¤čĆąĖ čŹč鹊ą╝, ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠ ą┐čĆąŠčüč鹊 ąĘą░ą┐čāčüčéąĖčéčī čéą░ą╣ą╝ąĄčĆ ąĖ ąĘą░ą│čĆčāąĘąĖčéčī čćąĖčüą╗ąŠ ą▓ CCR, ąĮą░ą┤ąŠ ąĄčēąĄ ąĖ ąĘą░ą┤ą░čéčī čĆąĄąČąĖą╝ ą▓čŗą▓ąŠą┤ą░ (Set/reset, toggle ąĖčéą┐. - ą┐ąŠč鹊ą╝ ą▒čāą┤ąĄčé čÅčüąĮąŠ ą┐ąŠč湥ą╝čā). ąØą░ ą┐ąŠčĆčé ąĄą│ąŠ ą▓čŗą▓ąŠą┤ąĖčéčī ąĮąĄ ąĮčāąČąĮąŠ, ąĮąŠ ą╝ąŠąČąĮąŠ ą┤ą╗čÅ ą║ąŠąĮčéčĆąŠą╗čÅ. ą¤ąŠčüą╗ąĄ č湥ą│ąŠ čüą┤ąĄą╗ą░ą╗ ąĄčēąĄ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąÉą”ą¤: čéą░ą║ ą║ą░ą║ čā ą╝ąĄąĮčÅ ą┐ąŠą║ą░ ą▓čüąĄą│ąŠ ąŠą┤ąĖąĮ ą║ą░ąĮą░ą╗, čÅ ąĄą│ąŠ ąĮą░ą┐ąĖčüą░ą╗ 菹╗ąĄą╝ąĄąĮčéą░čĆąĮąŠ - ą┐čĆąŠčüč鹊 čüčćąĖčéčŗą▓ą░ąĮąĖąĄ ą▒čāč乥čĆą░, ą║ąŠč鹊čĆąŠąĄ čāąČąĄ čüą░ą╝ąŠ ą┐ąŠ čüąĄą▒ąĄ čüąĮąĖą╝ą░ąĄčé ąĘą░ą┐čĆąŠčü ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąśčéą░ą║, ą┤ąĄą╗ą░ąĄą╝ ąĘą░ą┐čāčüą║ - ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓čüąĄą│ąŠ 5.4ą▓, ą▓ą╝ąĄčüč鹊 7.5ą▓. ą¦č鹊-č鹊 ąĮąĄ č鹊.
ąØą░čćą░ą╗ ą╗ąŠą╝ą░čéčī ą│ąŠą╗ąŠą▓čā ąĮą░ č鹥ą╝čā, ą░ ąĮąĄ ą▓ąŠčéą║ąĮčāčéčī ą╗ąĖ ą╝ąĮąĄ ą┐ąŠčüą╗ąĄ ą┤ąĄą╗ąĖč鹥ą╗čÅ ą┐ąŠą▓č鹊čĆąĖč鹥ą╗čī ąĮą░ ą×ąŻ (ą▒ą╗ą░ą│ąŠ ąĮą░ ą┐ą╗ą░č鹥 RSLK-MAX ąĄčüčéčī ąŠą┤ąĖąĮ ą╗ąĖčłąĮąĖą╣). ąØąŠ ą┐ąŠą║ą░ čüąŠą▒ąĖčĆą░ą╗čüčÅ čŹč鹊 čüą┤ąĄą╗ą░čéčī, ą┐čĆąŠą┤ąŠą╗ąČą░ą╗ čĆą░ąĘą╝čŗčłą╗čÅčéčī. ą¤ąŠčģąŠąČąĄ, čćč鹊 ąĖąĘ-ąĘą░ ą▓čŗčüąŠą║ąŠą│ąŠ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ ą┤ąĄą╗ąĖč鹥ą╗čÅ ą┐ąŠčüč鹊čÅąĮąĮą░čÅ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą▓čŗčłąĄ, č湥ą╝ ą▓čĆąĄą╝čÅ, ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠąĄ ąĮą░ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī sampling-ą░. ą£ąŠąČąĮąŠ čāą▓ąĄą╗ąĖčćąĖčéčī ą▓čĆąĄą╝čÅ čŹč鹊ą│ąŠ čüą░ą╝ą┐ą╗ąĖąĮą│ą░ (čüąĄą╣čćą░čü ąĄčüčéčī 32tclk, ąĮąŠ ą╝ąŠąČąĮąŠ čāą▓ąĄą╗ąĖčćąĖčéčī ą┤ąŠ 192). ąś čéčāčé čÅ ą▓čüą┐ąŠą╝ąĮąĖą╗, čćč鹊 čā čŹč鹊ą│ąŠ ąÉą”ą¤ ąĄčüčéčī čéą░ą║ąŠą╣ čĆąĄąČąĖą╝, ą║ą░ą║ Extended Sampling (ą▓ ąŠčéą╗ąĖčćąĖąĖ ąŠčé Pulse sampling). ąÆąŠčé ąĮąĄ ą╝ąŠą│čā ą▓čüą┐ąŠą╝ąĮąĖčéčī, ą▓čüč鹥čćą░ą╗ ą╗ąĖ čÅ čéą░ą║ąŠą╣ čĆąĄąČąĖą╝ čā ą┤čĆčāą│ąĖčģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ (ąĖą╗ąĖ ą┐čĆąŠčüč鹊 ąĮąĄ ąŠą▒čĆą░čēą░ą╗ ą▓ąĮąĖą╝ą░ąĮąĖąĄ)? ąóą░ą║ ą▓ąŠčé pulse sampling - čŹč鹊 ą║ąŠą│ą┤ą░ čäčĆąŠąĮčé ąĖą╝ą┐čāą╗čīčüą░ ąĘą░ą┐čāčüą║ą░ąĄčé č湥čĆąĄą┤čā ą┐čĆąŠčåąĄčüčüąŠą▓ - ąĮą░ą║ąŠą┐ą╗ąĄąĮąĖąĄ ąĘą░čĆčÅą┤ą░ ąĮą░ ąĖąĘą╝ąĄčĆąĖč鹥ą╗čīąĮąŠą╝ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆąĄ ąĖ čüą╗ąĄą┤ąŠą╝ čüą░ą╝ ą┐čĆąŠčåąĄčüčü ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ. Extended Sampling, ą▓ čüą▓ąŠčÄ ąŠč湥čĆąĄą┤čī ą┤ąĄą╗ą░ąĄčé čéą░ą║, čćč鹊 ą▓čüčæ ą▓čĆąĄą╝čÅ ą┐ąŠą║ą░ ą┤ą╗ąĖčéčüčÅ ąĘą░ą┐čāčüą║ą░čÄčēąĖą╣ ąĖą╝ą┐čāą╗čīčü - ąĮą░ą║ąŠą┐ąĖč鹥ą╗čīąĮčŗą╣ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ą▓čģąŠą┤ąĮąŠą╣ čåąĄą┐ąĖ (čé.ąĄ. ą┐ąŠčüč鹊čÅąĮąĮąŠ čü菹╝ą┐ą╗ąĖčĆčāąĄčéčüčÅ), ą░ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ ąĖą╝ą┐čāą╗čīčüą░ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą┐čĆąŠčåąĄčüčü ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ. ą¤ąŠčŹč鹊ą╝čā, čÅ ą╝ąŠą│čā ąĄą│ąŠ čĆą░čüčéčÅąĮčāčéčī ą░ąČ ą┤ąŠ 2.4ą╝čü! ąÆ ąŠą▒čēąĄą╝, ą┐ąŠą╝ąĄąĮčÅą╗ čŹč鹊čé ą▒ąĖčéąĖą║ ą▓ ą║ąŠąĮčäąĖą│ąĄ (čü pulse ąĮą░ extended) ąĖ čüčĆą░ąĘčā ą┐ąŠą║ą░ąĘą░ąĮąĖčÅ čüčéą░ą╗ąĖ 7.6ą▓. ą¤ąŠč鹊ą╝, ąĮąĄą╝ąĮąŠą│ąŠ ą┐ąŠ ą┐ąŠą┤ą▒ąĖčĆą░ą╗ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ, čéą░ą║ ą║ą░ą║ ąŠąĮąĖ ą▒čŗą╗ąĖ čĆą░čüčćąĖčéčŗ ąĖčüčģąŠą┤čÅ ąĖąĘ ąĮąŠą╝ąĖąĮą░ą╗ąŠą▓ ą┤ąĄą╗ąĖč鹥ą╗čÅ ąĖ ąŠą┐ąŠčĆčŗ 3.3ą▓, ą║ąŠč鹊čĆčŗąĄ ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ ąĮąĄ čÅą▓ą╗čÅčÄčéčüčÅ č鹊čćąĮčŗą╝ąĖ, ą┐ąŠą║ą░ ąĮąĄ ą┐ąŠą╗čāčćąĖą╗ ą┐ąŠą║ą░ąĘą░ąĮąĖą╣ čüąŠą▓ą┐ą░ą┤ą░čÄčēąĖčģ čü ą┐ąŠą║ą░ąĘą░ąĮąĖčÅą╝ąĖ č鹥čüč鹥čĆą░.
ą¤ąŠą┤ą║ą╗čÄčćąĖą╗ ą║ ą╗ą░ą▒ąŠčĆą░č鹊čĆąĮąŠą╝čā ąæą¤ ąĖ ą┐čĆąŠąĄčģą░ą╗čüčÅ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 6.2ą▓ - 10.0ą▓ - ą┐ąŠą║ą░ąĘą░ąĮąĖčÅ ą┐čĆąĖą╝ąĄčĆąĮąŠ čüąŠą▓ą┐ą░ą┤ą░čÄčé (ą╝ąĖąĮčāčü 0.1ą▓). ąŁčéą░ ą┐ąŠą│čĆąĄčłąĮąŠčüčéčī ą▓ąŠąĘąĮąĖą║ą░ąĄčé ąĖąĘ-ąĘą░ č鹊ą│ąŠ,čćč鹊 čÅ ąĖąĘą╝ąĄčĆčÅčÄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąŠčüą╗ąĄ ą║ą╗čÄčćą░ , ą┐ąŠą┤ą░čÄčēąĄą│ąŠ ą┐ąĖčéą░ąĮąĖąĄ ąĮą░ čüčģąĄą╝čā ąĖ ąĮą░ ą║ąŠč鹊čĆąŠą╝ č鹊ąČąĄ ąĮąĄą╝ąĮąŠą│ąŠ ą┐ą░ą┤ą░ąĄčé ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ. ąŁč鹊 čÅ ą▓ąĖąČčā ąĘą░ą╝ąĄčĆčÅčÅ č鹥čüč鹥čĆąŠą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĮą░ ą▒ą░čéą░čĆąĄąĄ ąĖ ą┐ąŠčüą╗ąĄ ą║ą╗čÄčćą░ - ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čĆą░ąĘą╗ąĖčćą░čÄčéčüčÅ ą║ą░ą║ čĆą░ąĘ ą┐čĆąĖą╝ąĄčĆąĮąŠ ąĮą░ 0.1ą▓. ą¤ąŠą┤ą║ą╗čÄčćą░ą╗čüčÅ ą┐ąŠčüą╗ąĄ ą║ą╗čÄčćą░ ą░ ąĮąĄ ą┤ąŠ, čćč鹊ą▒čŗ ą┐čĆąĖ ą▓čŗą║ą╗čÄč湥ąĮąĮąŠą╝ ą┐ąĖčéą░ąĮąĖąĖ čŹč鹊čé ą┤ąĄą╗ąĖč鹥ą╗čī ąĮąĄ čĆą░ąĘčĆčÅąČą░ą╗ ą▒ą░čéą░čĆąĄąĖ. ą£ą╝ą╝ą╝, ą┐ąŠą┤ą║ą╗čÄčćą░čéčī ą║ ą║ą░ą╗ąĖą▒čĆą░č鹊čĆčā, čÅ ą┐ąŠąČą░ą╗čāą╣ ąĮąĄ ą▒čāą┤čā - ą┤ą╗čÅ ą╝ąŠąĖčģ čåąĄą╗ąĄą╣ ą┐ąŠą║ą░ąĘąŠą╝ąĄčéčĆ ą┐ąŠą╗čāčćąĖą╗čüčÅ ą┤ąŠčüčéą░č鹊čćąĮąŠ čģąŠčĆąŠčł. ąÆ ą┐čĆąŠčéąĖą▓ąĮąŠą╝ čüą╗čāčćą░ąĄ, ąĮą░ą┤ąŠ ą▒čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ ą║ą░č湥čüčéą▓ąĄ ąŠą┐ąŠčĆčŗ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ąŠą┐ąŠčĆąĮąĖą║ REF_A ąĖ ą┤ąĄą╗ąĖč鹥ą╗čī ą┤ąĄą╗ą░čéčī ąĮą░ ą▒ąŠą╗ąĄąĄ ąĮąĖąĘą║ąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ, čéą░ą║ ą║ą░ą║ čŹč鹊čé ą╝ąŠą┤čāą╗čī ą╝ąŠąČąĄčé ą▓čŗą┤ą░ą▓ą░čéčī 1.2, 1.45 ąĖ 2.5ą▓.
_________________
ąÉ ą╗čÄą┤ąĖ ą┐ąŠčüą╝ąŠčéčĆčÅčé ąĖ čüą║ą░ąČčāčé: "ąĪąŠą▒ą░ą║ąĖ ą╗ąĄčéčÅčé. ąÆąŠčé ąĖ ąŠčüąĄąĮčī."
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
uldemir
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą╝ą░ą╣ 14, 2020 07:05:01 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214
ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
|
ąĪą╝ąŠčéčĆąĄą╗ ąĮą░ ą┤ąĮčÅčģ ą▓ąĄą▒ąĖąĮą░čĆ ąŠčé ST ą┐čĆąŠ Machine Learning Core. ąóąŠą╗ą║ąŠą╝ ąĮąĖč湥ą│ąŠ ąĮąĄ ą┐ąŠąĮčÅą╗, ą▓ąĖą┤ąĖą╝ąŠ, čŹč鹊 ąĄčēąĄ ąĮąĄ ą┐čĆąŠ ą╝ąĄąĮčÅ. ąöą░ ąĖ ą┐čĆąĖą╝ąĄčĆ, ą│ą┤ąĄ ą┐čĆąĖą▓ąŠą┤ąĖą╗ąŠčüčī ąŠą▒čāč湥ąĮąĖąĄ, ą▒čŗą╗ čüą╗ąĖčłą║ąŠą╝ čéčĆąĖą▓ąĖą░ą╗čīąĮčŗą╣ - ąĄą│ąŠ ą▓ą┐ąŠą╗ąĮąĄ ą╝ąŠąČąĮąŠ čüą┤ąĄą╗ą░čéčī ą┐čĆąŠčüčéčŗą╝ ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą╝, ą▒ąĄąĘ ąĖčüą║čāčüčüčéą▓ąĄąĮąĮąŠą│ąŠ ąĖąĮč鹥ą╗ą╗ąĄą║čéą░. ąØąŠ, čéą░ą╝ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ą╗ąĖčüčī ą▓ą░čĆąĖą░ąĮčéčŗ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮčŗčģ ą╝ąŠčēąĮąŠčüč鹥ą╣. ąś ą┤ą╗čÅ čüąĖčüč鹥ą╝ čéčĆąĄą▒čāčÄčēąĖčģ ą▒čŗčüčéčĆąŠą│ąŠ ą┐čĆąĖąĮčÅčéąĖčÅ čĆąĄčłąĄąĮąĖą╣ čāą║ą░ąĘčŗą▓ą░ą╗ąŠčüčī, čćč鹊 ą╗čāčćčłąĄ ąĄčüą╗ąĖ čŹč鹊čé MLC ąĮą░čģąŠą┤ąĖčéčüčÅ čā čüąĄąĮčüąŠčĆąĄ, ą░ ąĮąĄ ą│ą┤ąĄ-č鹊 ą▓ą┤ą░ą╗ąĖ, ą║čāą┤ą░ čéčĆąĄą▒čāčÄčéčüčÅ ą║ą░ąĮą░ą╗čŗ čüą▓čÅąĘąĖ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ąĖą╝ąĄčéčī ąĮąĖąĘą║čāčÄ ą┐čĆąŠą┐čāčüą║ąĮčāčÄ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ąĖą╗ąĖ ąĮą░ą┤čæąČąĮąŠčüčéčī. ąÉ čéą░ą║ ą║ą░ą║ ą▓ čŹč鹊ą╝ ą▓ąĄą▒ąĖąĮą░čĆąĄ ą┤ą╗čÅ ą┐čĆą╝ąĄčĆą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗čüčÅ ą┤ą░čéčćąĖą║ čāčüą║ąŠčĆąĄąĮąĖčÅ, čÅ ąĮą░čćą░ą╗ čüąĮąŠą▓ą░ ą┤čāą╝ą░čéčī ąĮą░ č鹥ą╝čā, ą║ąŠč鹊čĆą░čÅ ą╝ąĄąĮčÅ čāąČąĄ ą┐ąŠą╗-ą│ąŠą┤ą░ ą╝čāčćą░ąĄčé.
ąÜąŠą│ą┤ą░-č鹊 ą▓ąŠąĘąĮąĖą║ą╗ą░ ą╝čŗčüą╗čī, ą░ ąĮąĄ čüą┤ąĄą╗ą░čéčī ą╗ąĖ čéą░ą║, čćč鹊ą▒čŗ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ čĆąŠą▒ąŠčéą░ ą▓ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī ąĮąĄ čü ą┐ąŠą╝ąŠčēčīčÄ čéą░čģąŠą┤ą░čéčćąĖą║ąŠą▓, ą░ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ 6-ąŠčüąĮčŗčģ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆąŠą▓. ąöą░ąČąĄ ąĮą░čćą░ą╗ čā čüąĄą▒čÅ ąĖčüą║ą░čéčī - ą▒čŗą╗ ą║ąŠą│ą┤ą░-č鹊 ąŠą┤ąĖąĮ čéą░ą║ąŠą╣ ą╝ąŠą┤čāą╗čī ą║čāą┐ąĖą▓čłąĖ - ąĮąŠ čŹč鹊 ąŠą║ą░ąĘą░ą╗čüčÅ ą▓čüąĄą│ąŠ čéčĆčæčģąŠčüąĮčŗą╣ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆ. ą¤ąŠčŹč鹊ą╝čā, ą▓ č乥ą▓čĆą░ą╗ąĄ ą▒čŗą╗ ąĘą░ą║ą░ąĘą░ą▓čłąĖ ąĮą░ e-bay ą╝ąŠą┤čāą╗čī čłąĄčüčéąĖąŠčüąĮąŠą│ąŠ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆą░. ą¤čĆą░ą▓ą┤ą░, ąŠąĮ ąĄčēąĄ ą┤ąŠ čüąĖčģ ą┐ąŠčĆ ą┤ąŠ ą╝ąĄąĮčÅ čéą░ą║ ąĖ ąĮąĄ ą┤ąŠą▒čĆą░ą╗čüčÅ.
ąØąĄą╝ąĮąŠą│ąŠ ą┐ąŠčĆčŗą▓čłąĖčüčī ą┐ąŠ ąĖąĮč鹥čĆąĮąĄčéčā, ą▓čŗčćąĖčéą░ą╗, čćč鹊 ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ čłąĄčüčéąĖ ąŠčüąĄą╣ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠ. ąśąĘ-ąĘą░ ąĮąĄč鹊čćąĮąŠčüčéąĖ ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖą╝ąĄąĄčéčüčÅ "ą┤čĆąĄą╣čä" ą░ą▒čüąŠą╗čÄčéąĮčŗčģ ą║ąŠąŠčĆą┤ąĖąĮą░čé. ąöą╗čÅ čŹč鹊ą│ąŠ ąČąĄą╗ą░č鹥ą╗čīąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĄčēąĄ 3 ąŠčüąĖ - ą╝ą░ą│ąĮąĖč鹊ą╝ąĄčéčĆ. ą¤čĆą░ą▓ą┤ą░, čā ą╝ąĄąĮčÅ ąĮą░ ą┐ą░ą╝čÅčéąĖ ąŠą┤ąĖąĮ čüą╗čāčćą░ą╣, ą║ąŠą│ą┤ą░ čā ąŠą┤ąĮąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ ą▓ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅčģ FolkRace čĆąŠą▒ąŠčé ą▓ ąŠą┤ąĮąŠą╝ ą╝ąĄčüč鹥 ą▓ąĮąĄąĘą░ą┐ąĮąŠ čĆą░ąĘą▓ąŠčĆą░čćąĖą▓ą░ą╗čüčÅ, ą▓ąŠąĘą╝ąŠąČąĮąŠ ąĖąĘ-ąĘą░ ą┐čĆąŠčģąŠą┤čÅčēąĄą╣ ą┐ąŠą┤ ą┐ąŠą╗ąŠą╝ ą▓ č鹊ą╝ ą╝ąĄčüč鹥 ąČąĄą╗ąĄąĘąĮąŠą╣ čéčĆčāą▒čŗ.
ąØąŠ čā ą╝ąĄąĮčÅ ąČąĄ ąĄčüčéčī ą┐ą╗ą░čéą░ Thunder Sense 2 - ą░ čéą░ą╝ ąĄčüčéčī ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆ čü ą╝ą░ą│ąĮąĖč鹊ą╝ąĄčéčĆąŠą╝. ąś ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ ą║ąŠąŠčĆą┤ąĖąĮą░čé ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą▒čŗ ą┤ąĄą╗ą░čéčī ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆąĄ EFM, čćč鹊 čüč鹊ąĖčé ąĮą░ č鹊ą╣ ą┐ą╗ą░č鹥, ą░ čĆąŠą▒ąŠčéčā ą┐čĆąŠčüč鹊 ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą│ąŠč鹊ą▓čŗą╣ čĆąĄąĘčāą╗čīčéą░čé. ą¤čĆąŠą▒ą╗ąĄą╝ą░ ąĄčēąĄ, ą║ąŠąĮąĄčćąĮąŠ, čü čĆą░ąĘą╝ąĄčēąĄąĮąĖąĄą╝. ąøčāčćčłąĄ, ą▒čŗą╗ąŠ ą▒čŗ čćč鹊ą▒čŗ čüąĄąĮčüąŠčĆ ąĮą░čģąŠą┤ąĖą╗čüčÅ ą┐ąŠ čüąĄčĆąĄą┤ąĖąĮąĄ ą║ąŠą╗čæčüąĮąŠą╣ ąŠčüąĖ. ąĖąĮą░č湥, ą┐čĆąĖą┤čæčéčüčÅ ą┤ąĄą╗ą░čéčī ą║ąŠčĆčĆąĄą║čåąĖčÄ ąŠčé ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ čüąĄąĮčüąŠčĆą░ ą║ čåąĄąĮčéčĆčā čĆąŠą▒ąŠčéą░ (čüą╝ąĄčēąĄąĮąĖąĄ čü čāč湥č鹊ą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ą║čāą┤ą░ ą┐ąŠą▓ąĄčĆąĮčāčé čĆąŠą▒ąŠčé). ąØąŠ čéą░ą╝ ąĮą░čģąŠą┤ąĖčéčüčÅ čłą░čüčüąĖ. ąæą╗ąĖąČą░ą╣čłąĄąĄ ą╝ąĄčüč鹊 ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą┐čĆčÅą╝ąŠ ą┐ąŠą┤ ą┐ą╗ą░č鹊ą╣ LaunchPad. ąĢčēąĄ ą▓ąŠą┐čĆąŠčü, čāą┤ą░čüčéčüčÅ ą╗ąĖ čéčāą┤ą░ čŹč鹊čé Thunder Sense ąĘą░čüčāąĮčāčéčī.
ąĪą╗ąĄą┤čāčÄčēąĄąĄ, ąĮčāąČąĮąŠ ą▒čŗ ąĮą░ą┐ąĖčüą░čéčī čüąŠčäčé, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠ čŹčéąĖą╝ čāčüą║ąŠčĆąĄąĮąĖčÅą╝ ą┐čĆąŠą┤ąĄą╗ą░ąĄčé ą║čāčćčā ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĖą╣ ąĖ ą┤ą░čüčé č鹥ą║čāčēąĖąĄ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ. ąØąŠ čéčāčé ą┐ąŠą┤čāą╝ą░ą╗, ą░ ą▓ąĄą┤čī čŹčéą░ ą┐čĆąŠą▒ą╗ąĄą╝ą░ čéą░ą║ ąĖ ą┐čĆąŠčüąĖčéčüčÅ ą▒čŗčéčī čĆąĄčłąĄąĮąĮąŠą╣, ąĮąĄčāąČąĄą╗ąĖ ąĮąĖą║č鹊, ą┤ą░ąČąĄ čüčĆąĄą┤ąĖ ą║ą▓ą░ą┤čĆąŠą║ąŠą┐č鹥čĆčēąĖą║ąŠą▓, ąĄčæ ąĄčēąĄ ąĮąĄ čĆąĄčłąĖą╗? ąÆąĄą┤čī, ąĮą░ą▓ąĄčĆąĮčÅą║ą░ ąĄčüčéčī čāąČąĄ ą│ąŠč鹊ą▓čŗąĄ ą┐čĆąŠąĄą║čéčŗ? ą£ąŠąČąĄčé, ą║č鹊 čāąČąĄ ą▓ąĖą┤ąĄą╗? ą» č鹊ąČąĄ ą┐ąŠąĖčēčā, ą║ąŠą│ą┤ą░ ąŠą║ą░ąČčāčüčī čā ąĮąŠčĆą╝ą░ą╗čīąĮąŠą│ąŠ ąĖąĮč鹥čĆąĮąĄčé-čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ, ąĮąŠ ą╝ąŠąČąĄčé ą║č鹊 ą╝ąŠąČąĄčé ą┤ą░čéčī ąĮą░ą▓ąŠą┤ą║čā čüčĆą░ąĘčā?
_________________
ąÉ ą╗čÄą┤ąĖ ą┐ąŠčüą╝ąŠčéčĆčÅčé ąĖ čüą║ą░ąČčāčé: "ąĪąŠą▒ą░ą║ąĖ ą╗ąĄčéčÅčé. ąÆąŠčé ąĖ ąŠčüąĄąĮčī."
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
uldemir
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé ąĖčÄąĮ 02, 2020 17:18:09 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214
ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
ąÉą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆčŗ ą┐ąŠą║ą░ ąĮąĄ ą┐čĆąŠąĮąĖą║ą╗ąĖčüčī... ąĘą░č鹊, ą┐ąŠą╗čāčćąĖą╗ ąĮąŠą▓čŗą╣ ą╝ąŠą┤čāą╗čī ą┤ą╗čÅ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čåą▓ąĄčéą░. ąÆčüčéčĆąĄčćą░ą╣č鹥 ą╝ąŠą┤čāą╗čī VEML6040 ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ Vishay. ąŻ ą╝ąĄąĮčÅ ąĮąĄčé ą▒ąŠą╗čīčłąŠą│ąŠ ąŠą┐čŗčéą░, ąĮąŠ ąĖąĘ čéčĆčæčģ čüąĄąĮčüąŠčĆąŠą▓ čåą▓ąĄčéą░, ą║ąŠčéčĆčŗąĄ čÅ ą┐ąŠą┤ąĄčƹȹ░ą╗ ą▓ čĆčāą║ą░čģ - čŹč鹊čé čüą░ą╝čŗą╣ ą┐čĆąŠčüč鹊ą╣, ą┐ąŠąČą░ą╗čāą╣. ą×ą▒čēą░ąĄčéčüčÅ ą┐ąŠ i2c ąĖą╝ąĄąĄčé ą▓čüąĄą│ąŠ ąŠą┤ąĖąĮ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ ąĖ 4 čĆąĄą│ąĖčüčéčĆą░ ą┤ą╗čÅ čüčćąĖčéčŗą▓ą░ąĮąĖčÅ čĆąĄąĘčāą╗čīčéą░čéą░. ąÆčüčæ. ąØąĄčé ą┤ą░ąČąĄ čüčéą░čéčāčüą░, čüąŠąŠą▒čēą░čÄčēąĄą│ąŠ, čćč鹊 ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮčŗ ąĖ čĆąĄąĘčāą╗čīčéą░čéčŗ ą┤ąŠčüčéčāą┐ąĮčŗ. ąÆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ ą╝ąŠąČąĮąŠ ą▓čŗčüčéą░ą▓ąĖčéčī ą▓čĆąĄą╝čÅ ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠčé 40ą╝čü ą┤ąŠ 1280ą╝čü, čĆčāčćąĮąŠą╣ ąĖą╗ąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖą╣ čĆąĄąČąĖą╝ ąĘą░ą┐čāčüą║ą░, ą▒ąĖčé ą┤ą╗čÅ čĆčāčćąĮąŠą│ąŠ ąĘą░ą┐čāčüą║ą░ ąĖ ą▒ąĖčé ą▓čŗą║ą╗čÄčćą░čÄčēąĖą╣ čüąĄąĮčüąŠčĆ. ą¤ąŠčŹč鹊ą╝čā, čćč鹊ą▒čŗ ąĖą╝ ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ąŠčüčéą░č鹊čćąĮąŠ ąĘą░ą┐ąĖčüą░čéčī 0 ą▓ ą║ąŠąĮčäąĖą│ ąĖ čüąĄąĮčüąŠčĆ ąĮą░čćąĮčæčé čĆą░ą▒ąŠčéą░čéčī ą▓ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╝ čĆąĄąČąĖą╝ąĄ čü ą▓čĆąĄą╝ąĄąĮąĄą╝ ąĖąĮč鹥ą│čĆą░čåąĖąĖ 40ą╝čü. ąźą╝, ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ ą▓ą░ą╗ąĖą┤ąĮąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ (čćč鹊 ąŠąĮąĖ ą▓ąĘčÅčéčŗ ąĖąĘ ąŠą┤ąĮąŠą│ąŠ čåąĖą║ą╗ą░ ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĖčÅ), ą┐ąŠąČą░ą╗čāą╣, ąĮą░ą┤ąŠ čüą┤ąĄą╗ą░čéčī ą┐ąŠą▓č鹊čĆąĮąŠąĄ čüčćąĖčéčŗą▓ą░ąĮąĖąĄ ąĖ čüčĆą░ą▓ąĮąĄąĮąĖąĄ. ąØčā ąĖ ą┐čĆąĖąĮąĖą╝ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą║ą░ą║ ą▓ą░ą╗ąĖą┤ąĮčŗąĄ, ąĄčüą╗ąĖ ąŠą▒ą░ čĆą░ąĘą░ čüčćąĖčéą░ą╗ąĖčüčī ąŠą┤ąĖąĮą░ą║ąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ. ąØčā ą░ č鹥ą┐ąĄčĆčī, ąĮą░ą┤ąŠ ą▒čŗ ąĘą░ąĮčÅčéčīčüčÅ čĆąĄą░ą╗čīąĮčŗą╝ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄą╝ čåą▓ąĄčéą░. ąśąĘąĮą░čćą░ą╗čīąĮčŗą╣, ą╝ąĮąŠčÄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮčŗą╣ ą░ą╗ą│ąŠčĆąĖčéą╝ ą▒čŗą╗ ą║čĆą░ą╣ąĮąĄ čéčāą┐: ą┐čĆąĄą▓čŗčłąĄąĮąĖąĄ ąĮąĄą║ąŠąĄą│ąŠ ą┐ąŠčĆąŠą│ą░ čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ ąĮą░ą╗ąĖčćąĖąĄ čüąŠąŠčéą▓ąĄčéčüą▓čāčÄčēąĄą│ąŠ čåą▓ąĄčéą░. ąØąŠ čŹč鹊 ą╝ąĄąĮčÅ ąĮąĄ ąŠč湥ąĮčī čāčüčéčĆą░ąĖą▓ą░ą╗ąŠ - čģąŠč鹥ą╗ąŠčüčī ą┐ąŠą┤ą▓ąĄčüčéąĖ ą║ą░ą║čāčÄ-ąĮąĖą▒čāą┤čī ą╝ą░č鹥ą╝ą░čéąĖč湥čüą║čāčÄ ą▒ą░ąĘčā. ą¤ąŠčŹč鹊ą╝čā ą┐ąŠą┐čŗčéą░ą╗čüčÅ ą┤ą╗čÅ ąĮą░čćą░ą╗ą░ ą┐ąŠą┐čŗčéą░čéčīčüčÅ čĆą░ąĘą╝ąĄčüčéąĖčéčī ą┐ąŠą║ą░ąĘą░ąĮąĖčÅ čüąĄąĮčüąŠčĆąŠą▓ ą▓ čéčĆčæčģą╝ąĄčĆąĮąŠą╝ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ RGB ąĖ ą▓čŗčćąĖčüą╗čÅčéčī čĆą░čüčüč鹊čÅąĮąĖčÅ ą┤ąŠ ą║ąŠąŠčĆą┤ąĖąĮą░čé č鹊č湥ą║, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠąČąĖą┤ą░ąĄą╝čŗą╝ čåą▓ąĄčéą░ą╝. ąØą░ą┐čĆąĖą╝ąĄčĆ ą║čĆą░čüąĮčŗą╣: 255,0,0; ąĘąĄą╗čæąĮčŗą╣ 0,255,0 ąĖčéą┤. 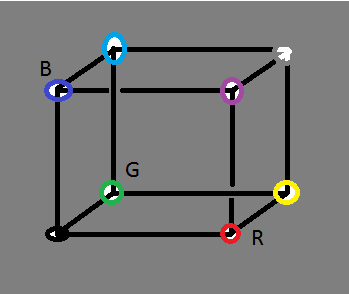 ąØčā ąĖ č鹊 čĆą░čüčüč鹊čÅąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą▓ čŹč鹊ą╝ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ ąŠą║ą░ąČąĄčéčüčÅ ą╝ąĄąĮčīčłąĄ (ąĖ ą╝ąĄąĮčīčłąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą┐ąŠčĆąŠą│ą░) - ąĖ čÅą▓ą╗čÅąĄčéčüčÅ čéčĆąĄą▒čāąĄą╝čŗą╝ čĆąĄąĘčāą╗čīčéą░č鹊ą╝. ąöą░ ą▓ąŠčé čü ą┐ąŠčĆąŠą│ąŠą╝ čā ą╝ąĄąĮčÅ ą║ą░ą║-č鹊 ąĮąĄ čüąŠčłą╗ąŠčüčī. ąĢčüą╗ąĖ ąĖąĮč鹥ąĮčüąĖą▓ąĮąŠčüčéčī ąŠčüą▓ąĄčēąĄąĮąĖčÅ ą╝ą░ą╗ą░ - čåą▓ąĄčé ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ, ąĄčüą╗ąĖ ą▒ąŠą╗čīčłą░čÅ - ąĮą░čćąĖąĮą░ąĄčé ą▓ąĖą┤ąĄčéčī čåą▓ąĄčéą░ ąĖ ąĮą░ "ą▒ąĄą╗ąŠą╝" č乊ąĮąĄ. ą¤ąŠčŹč鹊ą╝čā ąĮąĖč湥ą│ąŠ ą│ą╗čāą┐ąĄąĄ ąĮąĄ ą┐čĆąĖą┤čāą╝ą░ą╗, ą║ą░ą║ ą┐čĆąŠą▓ąĄčüčéąĖ ąĮąŠčĆą╝ą░ą╗ąĖąĘą░čåąĖčÄ čāčĆąŠą▓ąĮąĄą╣: RąĮąŠčĆą╝ = R/(R+G+B) GąĮąŠčĆą╝ = G/(R+G+B) ąĖčéą┤. ąÆąŠčé čŹč鹊 ą▒čŗą╗ fail. ążčāąĮą║čåąĖčÅ čüčéą░ą╗ą░ ą▓ąŠąĘą▓čĆą░čēą░čéčī ą┐ąŠčćčéąĖ ą▓čüąĄą│ą┤ą░ ąŠą┤ąĖąĮ čĆąĄąĘčāą╗čīčéą░čé - č湥čĆąĮčŗą╣ čåą▓ąĄčé. ą¤čĆąŠą▓ąĄą┤čÅ ą╝ąŠą┤ąĄą╗ąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ Excel ą┐ąŠąĮčÅą╗, čćč鹊 ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą▓čüąĄ ą║ąŠąĮčéčĆąŠą╗čīąĮčŗąĄ č鹊čćą║ąĖ ąĖą╝ąĄčÄčé čüčĆąĄą┤ąĖ ą║čĆą░čéčćą╣čłąĖčģ čĆą░čüčüč鹊čÅąĮąĖą╣ ąĖ čĆą░čüčüč鹊čÅąĮąĖčÅ ą┤ąŠ "č湥čĆąĮąŠą╣ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ" (0,0,0). ąÉ čéą░ą║ ą║ą░ą║ ą┐čĆąŠą▓ąĄčĆą║ą░ ąĮą░čćąĖąĮą░ąĄčéčüčÅ ąĖą╝ąĄąĮąĮąŠ čü ąĮąĄčæ, č鹊 ąĮą░ čŹč鹊ą╝ ą▓ą░čĆąĖą░ąĮč鹥 ą▓čüčæ ąĖ ąĘą░ą║ą░ąĮčćąĖą▓ą░ąĄčéčüčÅ. ąÜąŠčĆąŠč湥, čÅ ą┐ąŠąĮčÅą╗ čćč鹊 čŹč鹊 ąĮąĄ čĆąĄčłą░ąĄčé ą╝ąŠčÄ ąĘą░ą┤ą░čćčā. ąØčā ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čåą▓ąĄčéą░ čüčāčēąĄčüčéą▓čāąĄčé ąĄčēąĄ ą║čāčćą░ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣.. ąĢčüčéčī CIELAB, CIELUV, HSI. ąØčā, ą┐ąĄčĆą▓čŗąĄ ą┤ą▓ą░ ąŠč湥ąĮčī ą║čĆčāčéčŗąĄ čüą┐ąŠčüąŠą▒čŗ ąŠą┐ąĖčüą░ąĮąĖčÅ čåą▓ąĄč鹊ą▓ąŠą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░, ą┐ąŠčŹč鹊ą╝čā čĆąĄčłąĖą╗ ą▓ąŠčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąŠą▒čŗčćąĮčŗą╝ čłąĖčĆą┐ąŠčéčĆąĄą▒ąĮčŗą╝ HSI - Hue, Saturation, Intensity. ąÆąŠčé čŹč鹊čé Hue ąĖ ąĄčüčéčī ąĖčüą║ąŠą╝ą░čÅ ą▓ąĄčēčī. ą¢ą░ą╗čī č鹊ą╗čīą║ąŠ, čćč鹊 ąŠąĮą░ ą▓čŗčĆą░ąČą░ąĄčéčüčÅ ą▓ ą▓ąĖą┤ąĄ čāą│ą╗ą░ ą║čĆčāą│ą░. ąØčā ąĖ ą┤ą╗čÅ ą▓čŗčÅčüąĮąĄąĮąĖčÅ, ąĮčāąČąĮąŠ ą╗ąĖ ą▓čŗą┤ąĄą╗čÅčéčī čåą▓ąĄčé, ą╝ąŠąČąĮąŠ ą▓ąŠčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ ąĮą░čüčŗčēąĄąĮąĮąŠčüčéąĖ: ąĄčüą╗ąĖ ąĮą░čüčŗčēąĄąĮąĮąŠčüčéčī ąĮąĄą┤ąŠčüčéą░č鹊čćąĮą░ - čåą▓ąĄčé ą▒ąĄą╗čŗą╣ (ąŠčéč鹥ąĮą║ąĖ ąĮąĄ ą▓ąŠą╗ąĮčāčÄčé). I = (R+G+B)/3 - ąĖąĮč鹥ąĮčüąĖą▓ąĮąŠčüčéčī S = 1 - min(R,G,B)/I - ąĮą░čüčŗčēąĄąĮąĮąŠčüčéčī. ąóą░ą║ ą║ą░ą║ čüą░ą╝ą░ ą┐ąŠ čüąĄą▒ąĄ ąĖąĮč鹥ąĮčüąĖą▓ąĮąŠčüčéčī ą╝ąĮąĄ ąĮąĄ ąĮčāąČąĮą░, č乊čĆą╝čāą╗čā ą┤ą╗čÅ ąĮą░čüčŗčēąĄąĮąĮąŠčüčéąĖ čüą┤ąĄą╗ą░ą╗ čéą░ą║ąŠą╣: inv_saturation = 3 * min(R,G,B) / (R+G+B); ą▓čŗčćąĖčéą░ąĮąĖąĄ ąĖąĘ ąĄą┤ąĖąĮąĖčåčŗ č鹊ąČąĄ ą▓čŗą║ąĖąĮčāą╗ - ą╝ąĮąĄ ą▒ąĄąĘ čĆą░ąĘąĮąĖčåčŗ ą║ą░ą║ąŠąĄ čüčĆą░ą▓ąĮąĄąĮąĖąĄ ą┤ąĄą╗ą░čéčī. ąŁč鹊 ą▒čŗą╗ą░ čüą░ą╝ą░čÅ ą╗čæą│ą║ą░čÅ čćą░čüčéčī. ąÉ ą▓ąŠčé č乊čĆą╝čāą╗ą░ ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ Hue (ąŠą╣, ą╝ąĮąĄ ą╗ąĄąĮčī ą▓čŗčĆąĖčüąŠą▓čŗą▓ą░čéčī ą║ąŠčĆąĮąĖ ąĖ ą┤čĆąŠą▒ąĖ, ą┐ąŠč鹊ą╝čā ą▓čüčéą░ą▓ą╗čÄ ą▓čüčÄ ą║ą░čĆčéąĖąĮą║čā): 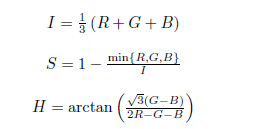 ąÆąŠčé čŹč鹊čé ą░čĆą║čéą░ąĮą│ąĄąĮčü ąĖ ąĄčüčéčī ąĮąĄą▒ąŠą╗čīčłąŠą╣ ą║ą░ą╝ąĄąĮčī ą┐čĆąĄčéą║ąĮąŠą▓ąĄąĮąĖčÅ. ąĢčüą╗ąĖ čéčāą┐ąŠ čüčćąĖčéą░čéčī ą┤čĆąŠą▒čī, č鹊 ąĮąĖč湥ą│ąŠ ąĮąĄ ą┐ąŠą╗čāčćąĖčéčüčÅ. ą¤ąŠč鹊ą╝čā ą║ą░ą║ ą┐čĆąŠčüč鹊ą╣ ą░čĆą║čéą░ąĮą│ąĄąĮčü ą╝ąŠąČąĄčé ą▓ąĄčĆąĮčāčéčī čĆąĄąĘčāą╗čīčéą░čé č鹊ą╗čīą║ąŠ ąŠčé -90 ą┤ąŠ +90 ą│čĆą░ą┤čāčüąŠą▓. ąó.ąĄ. ą┐ąĄčĆą▓čŗą╣ ąĖ č湥čéą▓čæčĆčéčŗą╣ ą║ą▓ą░ą┤čĆą░ąĮčé. ą¤ąŠčüą╗ąĄ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą┤čĆąŠą▒ąĖ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ ą▓č鹊čĆąŠą╝ ąĖ čéčĆąĄčéčīąĄą╝ ą║ą▓ą░ą┤čĆą░ąĮč鹥 č鹥čĆčÅčÄčéčüčÅ. ą¤ąŠčŹč鹊ą╝čā, ą┐čĆąŠčēąĄ ąŠą║ą░ąĘą░ą╗ąŠčüčī čŹčéčā ą┤čĆąŠą▒čī čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čéčī ą║ą░ą║ ą║ąŠąŠčĆą┤ąĖąĮą░čéčā ą▓ ą┐ą╗ąŠčüą║ąŠčüčéąĖ XY: X = 2*R - G - B, Y= sqrt(3)*(G - B). ąś ą▓ąŠčé ąĘąĮą░ą║ąĖ X ąĖ Y čāą║ą░ąĘčŗą▓ą░čÄčé ąĮą░ ą║ą▓ą░ą┤čĆą░ąĮčé ą▓ ą║ąŠč鹊čĆąŠą╝ ąĮą░čģąŠą┤ąĖčéčüčÅ č鹊čćą║ą░. 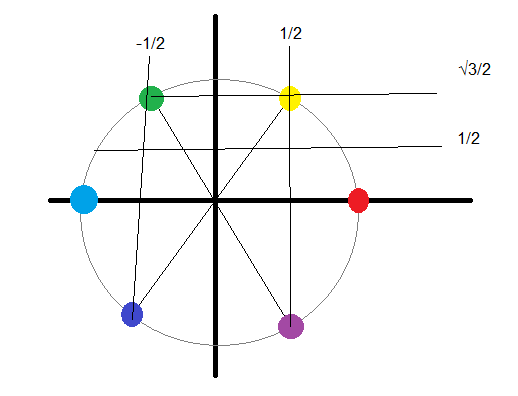 ąĢčüą╗ąĖ ąĮą░čĆąĖčüąŠą▓ą░čéčī čŹč鹊čé ą║čĆčāą│, ą┐ąŠą╗čāčćą░ąĄčéčüčÅ, čćč鹊 ą║čĆą░čüąĮčŗą╣ ąĮą░čģąŠą┤ąĖčéčüčÅ ąĮą░ 0 ą│čĆą░ą┤čāčüąĄ, ąČąĄą╗čéčŗą╣ ąĮą░ 60, ąĘąĄą╗čæąĮčŗą╣ - 120, čüą▓ąĄčéą╗ąŠą│ąŠą╗čāą▒ąŠą╣ 180, čüąĖąĮąĖą╣ -120, čäąĖąŠą╗ąĄč鹊ą▓čŗą╣ - -60. ąÜčüčéą░čéąĖ, ąĄčüą╗ąĖ ą▓ąĘčÅčéčī čüąĖąĮčāčü ąĖ ą║ąŠčüąĖąĮčāčü ąŠčé ą║ą░ąČą┤ąŠą╣ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ, č鹊 ą▓čŗčÅčüąĮąĖčéčüčÅ, čćč鹊 ą║ąŠąŠčĆą┤ąĖąĮą░čéą░ X ą┐čĆąĖąĮąĖą╝ą░ąĄčé ąĘąĮą░č湥ąĮąĖčÅ ą┐ą╗čÄčü-ą╝ąĖąĮčāčü 1 ąĖ 0.5, ą░ ą║ąŠąŠčĆą┤ąĖąĮą░čéą░ Y - 0 ąĖ ą┐ą╗čÄčü-ą╝ąĖąĮčāčü ą║ąŠčĆąĄąĮčī ąĖąĘ 3 ą┐ąŠą┐ąŠą╗ą░ą╝. ą¤ąŠčŹč鹊ą╝čā, ą▓čŗčćąĖčüą╗čÅčéčī čāą│ą╗čŗ ąĮąĄčé ąŠčüąŠą▒ąŠą│ąŠ čüą╝čŗčüą╗ą░. ąś ą╝ąŠąČąĮąŠ ąĖąĘ č乊čĆą╝čāą╗čŗ ą┤ą╗čÅ ą║ąŠąŠčĆą┤ąĖąĮą░čéčŗ Y ą▓čŗą▒čĆąŠčüąĖčéčī čŹč鹊čé "ą║ąŠčĆąĄąĮčī ąĖąĘ 3". ąóąŠą│ą┤ą░ ąĄčüą╗ąĖ Y ą▒ą╗ąĖąĘąŠą║ ą║ ąĮčāą╗čÄ čåą▓ąĄčé ąĖą╗ąĖ ą║čĆą░čüąĮčŗą╣, ąĖą╗ąĖ ą│ąŠą╗čāą▒ąŠą╣ (ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĘąĮą░ą║ą░ X), ą░ ąĄčüą╗ąĖ Y ą┐čĆąĖą╝ąĄčĆąĮąŠ čĆą░ą▓ąĄąĮ X, č鹊 ąŠčüčéą░ą╗čīąĮčŗąĄ 4 čåą▓ąĄčéą░ (ąĖ č鹊ąČąĄ ąŠą┐čĆąĄą┤ąĄą╗čÄčéčüčÅ ąĘąĮą░ą║ą░ą╝ąĖ X ąĖ Y). ą¤čĆąĖč湥ą╝, čŹč鹊 "ą▒ą╗ąĖąĘą║ąŠ ą║ ąĮčāą╗čÄ" ą╝ąŠąČąĮąŠ ą┐ąŠčüčéą░ą▓ąĖčéčī ąĮą░ ą│čĆą░ąĮąĖčåąĄ ą▓ 30 ą│čĆą░ą┤čāčüąŠą▓. ąÉ čüąĖąĮčāčü 30 ąĄčüčéčī 0.5 - ą┐ąŠčŹč鹊ą╝čā "ą┐ąŠčĆąŠą│" ą╝ąŠąČąĮąŠ čüčéą░ą▓ąĖčéčī ą║ą░ą║ čĆą░ąĘ ąĮą░ čŹč鹊ą╝ čāčĆąŠą▓ąĮąĄ - ąĄčüą╗ąĖ Y ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé -0.5 ą┤ąŠ +0.5 - čŹč鹊 ą▒ą╗ąĖąĘą║ąŠ ą║ 0, ąĖąĮą░č湥 - ą▓čüčæ ąŠčüčéą░ą╗čīąĮąŠąĄ. ą¤ąŠą┐čĆąŠą▒ąŠą▓ą░ą╗ ąĮą░ą┐ąĖčüą░čéčī ą║ąŠą┤ ąĖčüčģąŠą┤čÅ ąĖąĘ čŹčéąĖčģ ą┐čĆąĄą┤ą┐ąŠčüčŗą╗ąŠą║ - ą▓čüčæ ą▓čĆąŠą┤ąĄ čĆą░ą▒ąŠčéą░ąĄčé, ą║čĆąŠą╝ąĄ ąŠą┤ąĮąŠą│ąŠ - ąĮąĖ čĆą░ąĘčā ąĮąĄ čāą┤ą░ą╗ąŠčüčī ąŠčéą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░čéčī čüąĖąĮąĖą╣ čåą▓ąĄčé. ą¤ąŠč湥ą╝čā-č鹊 G - B ą▓čüąĄą│ą┤ą░ ą┤ą░čæčé ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗą╣ čĆąĄąĘčāą╗čīčéą░čé. ąÆčüčæ čćč鹊 ą╝ąĮąĄ ą║ą░ąČąĄčéčüčÅ "čüąĖąĮąĖą╝" ą┐ąŠą┤čüčéą░ą▓ą╗čÅčÄ ą┐ąŠą┤ čüąĄąĮčüąŠčĆ - čüąĖąĮąĄą│ąŠ ąĮąĄ ą▓ąĖąČčā - ą▓čüąĄą│ą┤ą░ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ąĘąĄą╗čæąĮą░čÅ čüąŠčüčéą░ą▓ą╗čÅčÄčēą░čÅ čü ą▒ąŠą╗čīčłąĄą╣, č湥ą╝ čüąĖąĮčÅčÅ ą░ą╝ą┐ą╗ąĖčéčāą┤ąŠą╣. ąØą░ą┤ąŠ ą▒čāą┤ąĄčé ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī ą▓ čüąĄąĮčüąŠčĆ ą┐ąŠčüą▓ąĄčéąĖčéčī čüąĖąĮąĖą╝ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝. ąöą░ąČąĄ, ąĄčüą╗ąĖ ą┐ąŠą┤ čüąĄąĮčüąŠčĆ ą┐ąŠą┤čüčāąĮčāčéčī ą▒ąĄą╗čŗą╣ ą╗ąĖčüčé ą▒čāą╝ą░ą│ąĖ, ą║čĆą░čüąĮą░čÅ ąĖ ąĘąĄą╗čæąĮą░čÅ čüąŠčüčéą░ą▓ą╗čÅčÄčēąĖąĄ čĆą░ą▓ąĮčŗ, ą░ ą▓ąŠčé čüąĖąĮčÅčÅ ą┐ąŠčćčéąĖ ą▓ ą┤ą▓ą░ čĆą░ąĘą░ ą╝ąĄąĮčīčłąĄ. ą£ąŠąČąĄčé, "ą▒ąĄą╗čŗą╣" čüą▓ąĄč鹊ą┤ąĖąŠą┤ ąĖą╝ąĄąĄčé ąŠč湥ąĮčī čüą╗ą░ą▒čāčÄ "čüąĖąĮčÄčÄ čüąŠčüčéą░ą▓ą╗čÅčÄčēčāčÄ? ąØą░ ą▓ąĘą╗čÅą┤, ąŠąĮ ąĖą╝ąĄąĄčé ąČąĄą╗č鹊ą▓ą░čéčŗą╣ ąŠčéč鹥ąĮąŠą║. ==== ąØą░ ą┐ąŠąĘą░ą┐čĆąŠčłą╗ąŠą╣ ąĮąĄą┤ąĄą╗ąĄ ąĘą░ą┤čāą╝ą░ą╗čüčÅ ąŠ č鹊ą╝, čćč鹊 čģąŠčĆąŠčłąŠ, čćč鹊 čüą┤ąĄą╗ą░ą╗ ą┐ą╗ą░ą▓ąĮčŗą╣ čĆą░ąĘą│ąŠąĮ, ą░ ą▓ąŠčé ą║ą░ą║ ą▒čŗčéčī čü ą┐ą╗ą░ą▓ąĮčŗą╝ č鹊čĆą╝ąŠąČąĄąĮąĖąĄą╝? ą¤čĆąŠą▒ą╗ąĄą╝ą░ ą▓ č鹊ą╝, ą║ą░ą║ ą▓čŗčćąĖčüą╗ąĖčéčī čü ą║ą░ą║ąŠą│ąŠ čĆą░čüčüč鹊čÅąĮąĖčÅ ąĮą░ą┤ąŠ ąĮą░čćąĖąĮą░čéčī č鹊čĆą╝ąŠąĘąĖčéčī. ąś ą┐ąŠą║ą░ čÅ ą║čĆčāčćčā čŹčéčā ą╝čŗčüą╗čī ą▓ ą│ąŠą╗ąŠą▓ąĄ, ą▓ą┤čĆčāą│ ą▓čŗą▓ą░ą╗ąĖą╗ą░čüčī ą╝čŗčüą╗čī, čćč鹊 čā ą╝ąĄąĮčÅ ąĄčēąĄ ąŠą┤ąĮąŠ ąĖąĘ čüą░ą╝čŗčģ č鹊čĆą╝ąŠąĘąĮčŗčģ ą╝ąĄčüčé - ą┐ąŠą▓ąŠčĆąŠčé čĆąŠą▒ąŠčéą░. ą¤čĆąĖ čŹč鹊ą╝, čÅ ą▓čüąĄą│ą┤ą░ ąĘąĮą░čÄ, ąĮą░ čüą║ąŠą╗čīą║ąŠ čÅ čģąŠčćčā ą┐ąŠą▓ąĄčĆąĮčāčéčīčüčÅ ąĖ ą▓čüąĄą│ą┤ą░ ą┐čĆąĖą╝ąĄčĆąĮąŠ ąĘąĮą░čÄ, ąĮą░ čüą║ąŠą╗čīą║ąŠ čāąČąĄ ą┐ąŠą▓ąĄčĆąĮčāą╗čüčÅ. ą¤ąŠčŹč鹊ą╝čā ą▓ čäčāąĮą║čåąĖčÄ ą┐ąŠą▓ąŠčĆąŠčéą░ ą▓čüčéą░ą▓ąĖą╗ ą║ąŠą┤ čĆą░ąĘą│ąŠąĮą░. ąĪąĮą░čćą░ą╗ą░, čüą┤ąĄą╗ą░ą╗ čéą░ą║, čćč鹊 čĆąŠą▒ąŠčé ą┐ąŠą╗ąŠą▓ąĖąĮčā ą┐ąŠą▓ąŠčĆąŠčéą░ čĆą░ąĘą│ąŠąĮčÅąĄčéčüčÅ, ą░ ą▓č鹊čĆčāčÄ ą┐ąŠą╗ąŠą▓ąĖąĮčā - č鹊čĆą╝ąŠąĘąĖčé. ąØąŠ, ąŠą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 ą┤ąĄą╗ą░čéčī čĆą░ąĘą│ąŠąĮ čü ą╝ąĖąĮąĖą╝čāą╝ą░ ą┤ąŠ čāą║ą░ąĘą░ąĮąĮąŠą╣ ą▓ ą║ąŠąĮčäąĖą│ąĄ čüą║ąŠčĆąŠčüčéąĖ ą┐ąŠą▓ąŠčĆąŠčéą░, ą░ ą┐ąŠčüą╗ąĄ 45 ą│čĆą░ą┤čāčüąŠą▓ (ąĄčüą╗ąĖ ą┐ąŠą▓ąŠčĆąŠčé ąĮą░ 90) ą┤ąĄą╗ą░čéčī č鹊čĆą╝ąŠąČąĄąĮąĖąĄ ą┤ąŠ ą╝ąĖąĮąĖą╝čāą╝ą░, ą▓čŗčģąŠą┤ąĖčé, čćč鹊 ą┐ąŠčćčéąĖ ą┐ąŠą╗ąŠą▓ąĖąĮčā ą┐ąŠą▓ąŠčĆąŠčéą░ čĆąŠą▒ąŠčé ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąĮą░ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ. ą¤ąŠčŹč鹊ą╝čā, čĆąĄčłąĖą╗, čćč鹊 ąĘą░ą┤ą░ą▓ą░ąĄą╝ą░čÅ ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüą║ąŠčĆąŠčüčéčī ą┐ąŠą▓ąŠčĆąŠčéą░ ą▒čāą┤ąĄčé ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą╣ čüą║ąŠčĆąŠčüčéčīčÄ, ą┤ąŠ ą║ąŠč鹊čĆąŠą╣ čĆąŠą▒ąŠčé ą▒čāą┤ąĄčé ą┐čĆąĖ č鹊čĆą╝ąŠąČąĄąĮąĖąĖ čüą▒ą░ą▓ą╗čÅčéčī čüą║ąŠčĆąŠčüčéčī. ą¤čĆąĖ čĆą░ąĘą│ąŠąĮąĄ, čĆąĄčłąĖą╗ čĆą░ąĘčĆąĄčłąĖčéčī čĆą░ąĘą│ąŠąĮčÅčéčīčüčÅ ą┤ąŠ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ. ą¤ąŠą│ąŠąĮčÅą▓ čĆąŠą▒ąŠčéą░ ą┐ąŠ čéčĆą░čüčüąĄ, čéą░ą║ ąČąĄ čĆąĄčłąĖą╗ čüą╝ąĄčüčéąĖčéčī č鹊čćą║čā ąĮą░čćą░ą╗ą░ č鹊čĆą╝ąŠąČąĄąĮąĖčÅ ąĮą░ 60 ą│čĆą░ą┤čāčüąŠą▓ (č鹊ąČąĄ ą┤ą╗čÅ 90 ą│čĆą░ą┤čāčüąĮąŠą│ąŠ ą┐ąŠą▓ąŠčĆąŠčéą░). ąØąŠ, ą┐ąŠčģąŠąČąĄ, ą┐čĆąŠčüč鹊 ą▓ą▓ąĄą┤čā ą▓ ą║ąŠąĮčäąĖą│ ąĄčēąĄ ą┐ą░čĆąŠčćą║čā ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, čćč鹊ą▒čŗ ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ čÅ ą╝ąŠą│ ą▒čŗčüčéčĆąŠ ąĖąĘą╝ąĄąĮąĖčéčī čŹčéąĖ čāą│ą╗čŗ ą▓ ą╗čÄą▒čāčÄ čüč鹊čĆąŠąĮčā ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąŠą▒čüč鹊čÅč鹥ą╗čīčüčéą▓.
_________________
ąÉ ą╗čÄą┤ąĖ ą┐ąŠčüą╝ąŠčéčĆčÅčé ąĖ čüą║ą░ąČčāčé: "ąĪąŠą▒ą░ą║ąĖ ą╗ąĄčéčÅčé. ąÆąŠčé ąĖ ąŠčüąĄąĮčī."
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ą×čĆą│ą░ąĮąĖąĘą░čåąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąĮą░ą┤ąĄąČąĮčŗčģ ą╗ąĖčéąĖąĄą▓čŗčģ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąŠą▓ EVE ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ ą░ąĘąĖą░čéčüą║ąŠą│ąŠ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░
ąÜą░č湥čüčéą▓ąĄąĮąĮąŠąĄ ąĖ ą▒ąĄąĘąŠą┐ą░čüąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, čĆą░ą▒ąŠčéą░čÄčēąĄąĄ ąŠčé ą░ą║ą║čāą╝čāą╗čÅč鹊čĆą░, ą┤ąŠą╗ąČąĮąŠ čāčćąĖčéčŗą▓ą░čéčī ąĄą│ąŠ čäąĖąĘąĖč湥čüą║ąĖąĄ ąĖ čģąĖą╝ąĖč湥čüą║ąĖąĄ čüą▓ąŠą╣čüčéą▓ą░, ą┐čĆąŠčäąĖą╗ąĖ ąĘą░čĆčÅą┤ą░ ąĖ čĆą░ąĘčĆčÅą┤ą░, ąĖčģ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ą┐ąŠą┤ ą▓ą╗ąĖčÅąĮąĖąĄą╝ čĆą░ąĘą╗ąĖčćąĮčŗčģ čāčüą╗ąŠą▓ąĖą╣, čéą░ą║ąĖčģ ą║ą░ą║ č鹥ą╝ą┐ąĄčĆą░čéčāčĆą░ ąĖ č鹊ą║ ąĮą░ą│čĆčāąĘą║ąĖ. ą£čŗ čĆą░čüčüą║ą░ąČąĄą╝ ąŠ ą╗ąĖčéąĖą╣-ąĖąŠąĮąĮčŗčģ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆąĮčŗčģ ą▒ą░čéą░čĆąĄčÅčģ EVE ąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čĆąĄčłąĄąĮąĖčÅčģ ąŠčé čĆą░ąĘą╗ąĖčćąĮčŗčģ ą║ąĖčéą░ą╣čüą║ąĖčģ ą║ąŠą╝ą┐ą░ąĮąĖą╣, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗčģ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠč鹊ą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čŹčéąĖčģ ąÉąÜąæ. ą¤čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ą▓ čüčéą░čéčīąĄ ą║ąĖčéą░ą╣čüą║ąĖąĄ ą░ąĮą░ą╗ąŠą│ąĖ ą┐ąŠą╝ąŠą│čāčé ąĘą░ą╝ąĄąĮąĖčéčī ą┐čĆąŠą┤čāą║čåąĖčÄ ąĘą░ą┐ą░ą┤ąĮčŗčģ ą▒čĆąĄąĮą┤ąŠą▓ čü ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĄą╣ čåąĄąĮčŗ ą▒ąĄąĘ ą┐ąŠč鹥čĆąĖ ą║ą░č湥čüčéą▓ą░.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
uldemir
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą░ą▓ą│ 19, 2020 17:13:27 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214
ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
|
ąøąĄčéąĮąĄąĄ ąĘą░čéąĖčłčīąĄ. ą¤ąŠą║ą░ ą║čāą┐ą░ąĄą╝čüčÅ, čĆą░ąĘą▓ą╗ąĄą║ą░ąĄą╝čüčÅ - ąĮąĄ ą┤ąŠ čĆąŠą▒ąŠč鹊ą▓. ąźąŠčéčÅ ąĮąĄą▒ąŠą╗čīčłąĖąĄ ą▒ąĄąĘčĆąĄąĘčāą╗čīčéą░čéąĮčŗąĄ ą┐ąŠą┤ą▓ąĖąČą║ąĖ ąĄčüčéčī. ą¤ąŠąĮą░čćą░ą╗čā ą▓ąĘą▒čĆąĄą╗ąŠčüčī ą╝ąĮąĄ čüą┤ąĄą╗ą░čéčī ą┐ąŠą╗ąĮčŗą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗą╣ ą░ąĮą░ą╗ąŠą│ čĆąŠą▒ąŠčéą░ ąĮą░ PSoC5. ą¤ąŠą┐čŗčéą░ą╗čüčÅ čüą┤ąĄą╗ą░čéčī 8 ą║ą░ąĮą░ą╗ąŠą▓ ąĘą░čģą▓ą░čéą░ (ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐ąŠą╗čāčćąĖą╗ąŠčüčī 8 čéą░ą╣ą╝ąĄčĆąŠą▓ čü ąĘą░čģą▓ą░č鹊ą╝ čüąĖąĮčģčĆąŠąĮąĮąŠ čĆą░ą▒ąŠčéą░čÄčēąĖčģ ąŠčé ąŠčéą┤ąĮąŠą│ąŠ ą▓ąĄą┤čāčēąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░) ą┤ą╗čÅ čüąĄąĮčüąŠčĆą░ ą╗ąĖąĮąĖąĖ. ą¤čĆą░ą▓ą┤ą░ čŹč鹊 čüčŖąĄą╗ąŠ ą▓čüąĄ čĆąĄčüčāčĆčüčŗ, čéą░ą║ čćč鹊 ą┤ą░ąČąĄ ą┤ąĖčüą┐ą╗ąĄą╣ OLED č湥čĆąĄąĘ SPI čāąČąĄ ąĮąĄ ą╝ąŠą│ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī. ą¤ąŠčŹč鹊ą╝čā čŹčéčā ąĘą░č鹥čÄ ąŠčéą▒čĆąŠčüąĖą╗. ąŚą░č鹊, čĆąĄčłąĖą╗ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą¤ąŚąĪ ą╗ąĖąĮąĄą╣ą║čā. ąĪą┤ąĄą╗ą░ą╗ čüčģąĄą╝čā ą│ąĄąĮąĄčĆčÅčēčāčÄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ čüąĖą│ąĮą░ą╗čŗ - ąĮą░ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░č乥 ą┐čĆąŠą▓ąĄčĆąĖą╗. ąØąŠ čüą░ą╝čā ą¤ąŚąĪ ąĮąĄ ą┐ąŠą┤ą║ą╗čÄčćą░ą╗, čéą░ą║ ą║ą░ą║ ąĮčāąČąĮąŠ ą▒čŗą╗ąŠ ą▒čŗ čüą┤ąĄą╗ą░čéčī čüč鹥ąĮą┤: ą║ą░ą╝ąĄčĆą░, ą╝ąĖčłąĄąĮčī ąĖčéą┐. ąś čüąĮą░čćą░ą╗ą░ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī, čćč鹊 ą▓čŗą┤ą░čæčé ą╝ą░čéčĆąĖčåą░ ąĮą░ ą▓čŗčģąŠą┤ąĄ, ąĖ ąĘą░ąĮčÅčéčīčüčÅ ąÉą”ą¤. ąÆąĄčĆąĮąĄąĄ, čü DMA ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé čü ąÉą”ą¤ ą┤ą░ąĮąĮčŗąĄ čüą║ą╗ą░ą┤čŗą▓ą░čéčī ą▓ ą▒čāč乥čĆ. ąØąŠ čŹč鹊 ą┐ąŠą┤ąŠąČą┤čæčé, čéą░ą║ ą║ą░ą║ ą┐ąŠą║ą░ čÅ čüąĮąŠą▓ą░ ąĮąĄ ą▓ąĖąČčā, ą│ą┤ąĄ čŹčéčā ą¤ąŚąĪ čĆą░ąĘą╝ąĄčüčéąĖčéčī ą▓ čāą┤ąŠą▒ąĮąŠą╝ ą╝ąĄčüč鹥 ąĮą░ čĆąŠą▒ąŠč鹥.
ąØąĄą╝ąĮąŠą│ąŠ ą┐ąŠą▓ąŠąĘąĖą╗čüčÅ čü čüąĄąĮčüąŠčĆąŠą╝ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čåą▓ąĄčéą░. ąÆčŗą╗ąĖąĘčŗą▓ą░ą╗ ą░ą╗ą│ąŠčĆąĖčéą╝čŗ. "ąöąŠą▒ąĖą╗čüčÅ" č鹊ą│ąŠ, čćč鹊 ą╝ąŠčÄ "ąĘąĄą╗čæąĮčāčÄ" ą▒čāą╝ą░ąČą║čā čĆąŠą▒ąŠčé ą▓ąĖą┤ąĖčé ą║ą░ą║ ąČąĄą╗čéčāčÄ. ą¤čĆą░ą▓ą┤ą░, ąĄčüą╗ąĖ ą┐ąŠą┤čüčāąĮčāčéčī ą║čāčüąŠą║ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░čéčŗ čü ąĘąĄą╗čæąĮąŠą╣ ą╝ą░čüą║ąŠą╣ - ą▓ąĖą┤ąĖčé č湥čéą║ąŠ ąĘąĄą╗čæąĮčŗą╣ čåą▓ąĄčé. ąĪ ąŠą┤ąĮąŠą╣ čüč鹊čĆąŠąĮčŗ, ąĄčüą╗ąĖ čĆąŠą▒ąŠčéą░ ą▓čüąĄą│ą┤ą░ ąĘą░ą┐čāčüą║ą░čéčī čü ąĘąĄą╗ąĄąĮąŠą│ąŠ ą┐ąŠą╗čÅ, ą┤ąŠčüčéą░č鹊čćąĮąŠ č鹊ą╗čīą║ąŠ čüčéą░ą▒ąĖą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī ą║čĆą░čüąĮčŗą╣ čåą▓ąĄčé. ąĪ ą┤čĆčāą│ąŠą╣ čüč鹊čĆąŠąĮčŗ, čÅ ą┐ąŠą┐čĆą░ą▓ąĖą╗ ą░ą╗ą│ąŠčĆąĖčéą╝ čéą░ą║, čćč鹊 čĆąŠą▒ąŠčéą░ č鹥ą┐ąĄčĆčī ą╝ąŠąČąĮąŠ ąĘą░ą┐čāčüą║ą░čéčī ąĮą░ ąĖąĘčāč湥ąĮąĖąĄ ą╗ą░ą▒ąĖčĆąĖąĮčéą░ ąĖąĘ ą╗čÄą▒ąŠą│ąŠ čéčāą┐ąĖą║ą░. ąØą░ą╣ą┤čÅ čéčāą┐ąĖą║ čü ąĘąĄą╗čæąĮčŗą╝ ą┐ąŠą╗ąĄą╝ ąŠąĮ čüą░ą╝ ąŠčéą╝ąĄčéąĖčé, ą│ą┤ąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ čüčéą░čĆč鹊ą▓ą░čÅ č鹊čćą║ą░ ąĖ ą┐čĆąŠą╗ąŠąČąĖčé ą╝ą░čĆčłčĆčāčé čāąČąĄ ąŠčé čéčāą┤ą░ ą┤ąŠ čäąĖąĮąĖčłą░.
ąŻą▒čĆą░ą╗ ą┐čĆąĖ čüąŠčüčéą░ą▓ą╗ąĄąĮąĖąĖ ą║ą░čĆčéčŗ "ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖąĄ" čĆąŠą▒ąŠčéą░ ą▓ ąŠčĆč鹊ą│ąŠąĮą░ą╗čīąĮąŠą╣ čüąĄčéą║ąĄ. ąŁč鹊 ą┤ą░čæčé čćčāčéčī ą▒ąŠą╗čīčłąĄ čüą▓ąŠą▒ąŠą┤čŗ ąĖ ą╝ąĄąĮčīčłąĄ ą┐čĆąŠą▒ą╗ąĄą╝ ąĄčüą╗ąĖ čÅ čāą▓ąĄą╗ąĖčćąĖą▓ą░čÄ ą┤ąŠą┐čāčüą║ąĖ ąĮą░ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖčÄ čāąČąĄ ą┐ąŠčüąĄčēąĄąĮąĮčŗčģ čāąĘą╗ąŠą▓. ą¤čĆą░ą▓ą┤ą░ čŹč鹊 ąĖčüą┐ąŠčĆčéąĖą╗ąŠ ą╝ąĮąĄ ąŠčéčĆąĖčüąŠą▓ą║čā ą║ą░čĆčéčŗ ąĮą░ ą┤ąĖčüą┐ą╗ąĄąĄ. ąóą░ą║ ą║ą░ą║ čā ą╝ąĄąĮčÅ ą▓čüąĄą│ąŠ ąŠą┤ąĮą░ čäčāąĮą║čåąĖčÅ - čĆąĖčüąŠą▓ą░ąĮąĖąĄ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąĖą║ą░, ą║ąŠč鹊čĆą░čÅ čĆąĖčüčāąĄčé ą╝ąĮąĄ ą▓čüčæ, ąĖ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąĖą║ąĖ, ąĖ ą╗ąĖąĮąĖąĖ (č鹊ą╗čīą║ąŠ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮčŗąĄ ąĖ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮčŗąĄ), ąĖ č鹊čćą║ąĖ, ąŠąĮą░, čāą▓čŗ, ą┤ąĖą░ą│ąŠąĮą░ą╗čīąĮčŗąĄ ą╗ąĖąĮąĖąĖ čĆąĖčüąŠą▓ą░čéčī ąĮąĄ ą╝ąŠąČąĄčé. ą¤ąŠčŹč鹊ą╝čā ą┐čĆąĖčłą╗ąŠčüčī ą▒čĆą░čéčī ąĮą░ ą┐ąŠą╝ąŠčēčī ąæčĆąĄąĘąĄąĮčģąĄą╝ą░ ąĖ ąĮą░ą┐ąĖčüą░čéčī čäčāąĮą║čåąĖčÄ, ą┤ą╗čÅ čĆąĖčüąŠą▓ą░ąĮąĖčÅ ą╗čÄą▒čŗčģ ą╗ąĖąĮąĖą╣.
ą£ąĮąĄ čéčāčé ą┐ąŠą╗č鹊čĆą░ ą╝ąĄčüčÅčåą░ ąĮą░ąĘą░ą┤ ą┐čĆąĄąĘąĄąĮč鹊ą▓ą░ą╗ąĖ ąĮąŠčāčéą▒čāą║ čü ą┤ąŠčģą╗čŗą╝ ą▓ąĖąĮč湥čüč鹥čĆąŠą╝. ąÉ čéą░ą║ ą║ą░ą║ čā ą╝ąĄąĮčÅ ąĘą░ą▓ą░ą╗čÅą╗čüčÅ ą╗ąĖčłąĮąĖą╣ SSD ą┤ąĖčüą║, čÅ ą▓čüčéą░ą▓ąĖą╗ ąĄą│ąŠ ąĖ ą┐čŗčéą░čÄčüčī ą┐ąĄčĆąĄčüąĄčüčéčī ąĮą░ ąĮąĄą│ąŠ - čüą┤ąĄą╗ą░čéčī "ą┐ąŠčģąŠą┤ąĮčŗą╝" ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą╝. ąŚą░ąĮčÅą╗čüčÅ ąĖąĮčüčéą░ą╗čÅčåąĖąĄą╣ Keil ąĖ CCS. CCS čüčéą░ą▓ąĖą╗ čüčĆą░ąĘčā čüą▓ąĄąČąĄąĮčīą║ąĖą╣ - čāąČąĄ 10-ą╣. ąś čüąĮąŠą▓ą░ ą┐čĆąŠą▒ą╗ąĄą╝čŗ čü ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą╝. Keil-čā ą┐ąŠčüčéą░ą▓ąĖą╗ ą║ą░ą║čāčÄ-č鹊 ą┐ąŠą┤ą┤ąĄčƹȹ║čā XDS110. ąöą░ ą▓ąŠčé ąÜąĄą╣ą╗ ąĄčæ ąĮąĄ ą▓ąĖą┤ąĖčé. ąĢčüą╗ąĖ čüčéą░ą▓ąĖčéčī 32-ą▒ąĖčéąĮčāčÄ - čĆą░ą▒ąŠčéą░ąĄčé, čüčéą░ą▓ą╗čÄ 64-ą▒ąĖčéąĮčāčÄ - ą│ąŠą▓ąŠčĆąĖčé, čćč鹊 ąĮąĄčé ą║ą░ą║ąŠą│ąŠ-č鹊 čäą░ą╣ą╗ą░ (čģąŠčéčÅ čäą░ą╣ą╗ ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ ąĄčüčéčī ąĖ ąĖą╝ąĄąĮąĮąŠ čéą░ą╝ ą│ą┤ąĄ ąŠąĮąŠ ąĖčēąĄčé). ąÆ ą│čāą│ą╗ąĄ ąĮą░čłąĄą╗ ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐ąŠčģąŠąČąĄą╣ ą┐čĆąŠą▒ą╗ąĄą╝čŗ - čéą░ą╝ TI ą┐ąŠčüą╗ą░ą╗ ą▓ Keil. ąŚą░č鹊 ąĮą░čłąĄą╗, čćč鹊 ą▓ą╝ąĄčüč鹊 XDS110 ą╝ąŠąČąĮąŠ ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ąĖą╝-č鹊 CMSIS-DAP - ą▓ą║ą╗čÄčćąĖą╗ ąĄą│ąŠ ąĖ ą┐ąŠą║ą░ čāčüą┐ąŠą║ąŠąĖą╗čüčÅ.
ąóčāčé ąČąĄ čĆąĄčłąĖą╗ ą┐čĆąŠą▓ąĄčĆąĖčéčī, ą░ ą║ą░ą║ ą▓čüčæ čĆą░ą▒ąŠčéą░ąĄčé ą▓ CCS? ąĪą║ą░čćą░ą╗ ą╗ą░ą▒ąŠčĆą░č鹊čĆąĮčŗąĄ čĆą░ą▒ąŠčéčŗ, ą┐čĆąŠąĖą╝ą┐ąŠčĆčéąĖčĆąŠą▓ą░ą╗ ąĖčģ, ą▒čŗčüčéčĆąĄąĮčīą║ąŠ ąĮą░ą║ąĖą┤ą░ą╗ čĆąĄčłąĄąĮąĖąĄ ą┤ą╗čÅ 3-ą╣ ą╗ą░ą▒ąŠčĆą░č鹊čĆąĮąŠą╣ čĆą░ą▒ąŠčéčŗ (ąĮą░ ą░čüčüąĄą╝ą▒ąĄą╗ąĄčĆąĄ čäčāąĮą║čåąĖčÅ ą▓čŗčćąĖčüą╗čÅčÄčēą░čÅ 119čüą║ąŠą╗čīą║ąŠč鹊čéą░ą╝/(x-1058)) ąĖ ą┐ąŠą┐čŗčéą░ą╗čüčÅ ąĘą░ą│čĆčāąĘąĖčéčī ą┐ąŠą┤ ąŠčéą╗ą░ą┤ą║čā. ąÉ ąŠčéą╗ą░ą┤ą║ą░ ąĮąĄ ąĖą┤čæčé. ąōąŠą▓ąŠčĆąĖčé, čćč鹊 ąĮąĄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ. ąĪąĮąŠą▓ą░ ą┐ąŠą╗ąĄąĘ ą▓ ą│čāą│ą╗. ąÆčŗą│čāą│ą╗ąĖą╗, čćč鹊 "čā ą▓ą░čü ą▓ ą┐čĆąŠąĄą║č鹥 ąĮąĄ čüč鹊ąĖčé ą│ą░ą╗ąŠčćą║ą░ Connect to target on debugger startup". ąĪą╝ąŠčéčĆčÄ, ąĖ ą▓ą┐čĆą░ą▓ą┤čā, ą│ą░ą╗ąŠčćą║ąĖ ąĮąĄčé. ąØąŠ ą▓ąĄą┤čī ą▒čŗą╗ą░... ą░ą░ą░ą░ą░ą░ą░. ąś čéčāčé čÅ ąĮą░čćąĖąĮą░čÄ ą┐čĆąĖą┐ąŠą╝ąĖąĮą░čéčī, čćč鹊 ą║ąŠą│ą┤ą░ čüą║ą░čćąĖą▓ą░ą╗ čéą░ą╝ ą╝ąĄą╗čīą║ąĮčāą╗ą░ čåąĖčäąĖčĆą║ą░ 1 ąĮą░ ą║ąŠąĮčåąĄ. ąŚąĮą░čćąĖą╗, čŹč鹊 čāąČąĄ ąĮąŠą▓ą░čÅ ą▓ąĄčĆčüąĖčÅ ą╗ą░ą▒ąŠčĆą░č鹊čĆąĮčŗčģ čĆą░ą▒ąŠčé. ąÆ ą▓ąĄčĆčüąĖąĖ 1.00.00 ą│ą░ą╗ąŠčćą║ą░ čüč鹊čÅą╗ą░, ą░ ą▓ 1.00.01 - ą┐čĆąŠą┐ą░ą╗ą░. ą¤čĆąŠą▓ąĄčĆąĖą╗ ąĄčēąĄ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐čĆąŠąĄą║č鹊ą▓ ąĖąĘ čŹč鹊ą│ąŠ ą┐ą░ą║ąĄčéą░, ą│ą░ą╗ąŠčćą║čā ąĮąĄ ąĮą░čłąĄą╗.
ąØąŠ, ą┐ąŠą╝ąĖą╝ąŠ čŹč鹊ą│ąŠ ąŠčéą╗ąĖčćąĖčÅ, čĆąĄčłąĖą╗ ą┐ąŠąĖčüą║ą░čéčī ąĄčēąĄ. ąś ąĘą░ą╝ąĄčéąĖą╗, čćč鹊 ą┐ąŠčÅą▓ąĖą╗čüčÅ ą┐čĆąŠąĄą║čé RobotArm. ąó.ąĄ. ą╝ąŠąČąĮąŠ ąĮą░čåąĄą┐ąĖčéčī čĆčāą║čā Pololu #3550 ąĖ ą┐ąŠčłąĄą▓ąŠą╗ąĖčéčī ąĄčÄ. ąöčāą╝ą░ą╗-ą┤čāą╝ą░ą╗ ąĖ čĆąĄčłąĖą╗, čćč鹊 čüąŠčéąĮčÄ ą┤ąŠą╗ą╗ą░čĆąŠą▓ ą┤ą╗čÅ čŹč鹊ą╣ ąĖą│čĆčāčłą║ąĖ čéčĆą░čéąĖčéčī ą┐ąŠą║ą░ ąĮąĄ čģąŠč湥čéčüčÅ. ą¤čĆą░ą▓ą┤ą░, čćč鹊ą▒čŗ ąŠąĮąŠ ąĘą░čĆą░ą▒ąŠčéą░ą╗ąŠ, ąĄčēčæ ąĮčāąČąĮąŠ, čćč鹊ą▒čŗ ą▒čŗą╗ąĖ čüą┤ąĄą╗ą░ąĮčŗ ąĘą░ą┤ą░ąĮąĖčÅ ąĖąĘ ąĮąĄą║ąŠč鹊čĆčŗčģ ą╗ą░ą▒. ąś ą▓ąŠčé ą▓ąŠąĘąĮąĖą║ ą▓ąŠą┐čĆąŠčü, ą░ ą║ą░ą║ "ą┐čĆąŠą░ą┐ą│čĆąĄą╣ą┤ąĖčéčī" čüąŠą╗čÄčłąĄąĮčŗ, čćč鹊 ą▒čŗą╗ąĖ čüą┤ąĄą╗ą░ąĮčŗ čĆą░ąĮąĄąĄ ą▓ čŹč鹊čé ą┐ą░ą║ąĄčé. ąś ą▒čāą┤čāčé ą╗ąĖ ą║ą░ą║ą░čÅ ą╗ąĄą║čåąĖčÅ ąĖą╗ąĖ ą┤ąŠą║čāą╝ąĄąĮčé čü "čĆčāą║ąŠą▓ąŠą┤čÅčēąĖą╝ąĖ čāą║ą░ąĘą░ąĮąĖčÅą╝ąĖ" ą┐ąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÄ čŹč鹊ą╣ čĆą░ą▒ąŠčéčŗ? ą▓ ą│čāą│ą╗ąĄ ąŠčéą▓ąĄčéą░ ą┐ąŠą║ą░ ąĮąĄ ąĮą░čłąĄą╗. ąÆ curriculum ąĖąĘą╝ąĄąĮąĄąĮąĖą╣ č鹊ąČąĄ ą┐ąŠą║ą░ ąĮąĄ ąĮą░čłąĄą╗.
ą¤čĆąŠą░ą┐ą│čĆąĄą╣ą┤ąĖą╗ CCS čéą░ą║ ąČąĄ ąĖ ąĮą░ čüčéą░čåąĖąŠąĮą░čĆąĮąŠą╝ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ. ąś, ąŠ, čćčāą┤ąŠ! ąóąĄą┐ąĄčĆčī ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ąĘą░ą┐čāčēąĄąĮąĮčŗą╝ CCS ąĮąĄ ą╝ąĄčłą░ąĄčé ą╝ąŠąĄą╝čā ą║ąŠą╝ą┐čīčÄč鹥čĆčā čüą┐ą░čéčī. ąØą░ą║ąŠąĮąĄčå-č鹊 čŹčéą░ ą▒ą░ą│ą░ ąĖčüč湥ąĘą╗ą░.
_________________
ąÉ ą╗čÄą┤ąĖ ą┐ąŠčüą╝ąŠčéčĆčÅčé ąĖ čüą║ą░ąČčāčé: "ąĪąŠą▒ą░ą║ąĖ ą╗ąĄčéčÅčé. ąÆąŠčé ąĖ ąŠčüąĄąĮčī."
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
ąØąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ EVE čüąĄčĆąĖąĖ PLM ą┤ą╗čÅ GSM-čéčĆąĄą║ąĄčĆąŠą▓, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ąČčæčüčéą║ąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ (ą┤ąŠ -40┬░ąĪ)
ąÜąŠą╝ą┐ą░ąĮąĖčÅ EVE ą▓čŗą┐čāčüčéąĖą╗ą░ ąĮąŠą▓čŗą╣ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čüąĄčĆąĖąĖ PLM, čüąŠč湥čéą░čÄčēąĖą╣ ą▓ čüąĄą▒ąĄ ą▓čŗčüąŠą║čāčÄ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéčī, ą┤ą╗ąĖč鹥ą╗čīąĮčŗą╣ čüčĆąŠą║ čüą╗čāąČą▒čŗ, čłąĖčĆąŠą║ąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĖ ą▓čŗčüąŠą║čāčÄ č鹊ą║ąŠąŠčéą┤ą░čćčā ą┤ą░ąČąĄ ą┐čĆąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ.
ąŁčéąĖ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąĘą░čĆčÅą┤ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąŠčé -40/-20┬░ąĪ (čüąĮąĖąČąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ č鹊ą║ą░), ą▒ąĄąĘąŠą┐ą░čüąĮčŗ (ąĮąĄ ą▓ąŠčüą┐ą╗ą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĖ ąĮąĄ ą▓ąĘčĆčŗą▓ą░čÄčéčüčÅ) ą┐čĆąĖ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╝ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĖ (ą┐čĆąŠčéčŗą║ą░ąĮąĖąĄ ąĖ čüą┤ą░ą▓ą╗ąĖą▓ą░ąĮąĖąĄ), čāčüč鹊ą╣čćąĖą▓čŗ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą╝ąĄąĮčÅčéčīčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą░ą▓č鹊čéčĆą░ąĮčüą┐ąŠčĆčéą░ (čéčĆąĄą║ąĄčĆčŗ, ą╝ą░čÅčćą║ąĖ, čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ), čéą░ą║ ąĖ ą┤ą╗čÅ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░, IoT-čāčüčéčĆąŠą╣čüčéą▓.
ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ>>
|
|
|
|
|
|
|
Ser60
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪčĆ ą░ą▓ą│ 19, 2020 21:37:57 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 74
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 607
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą┤ąĄą║ 24, 2008 09:58:58
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3715
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 3
|
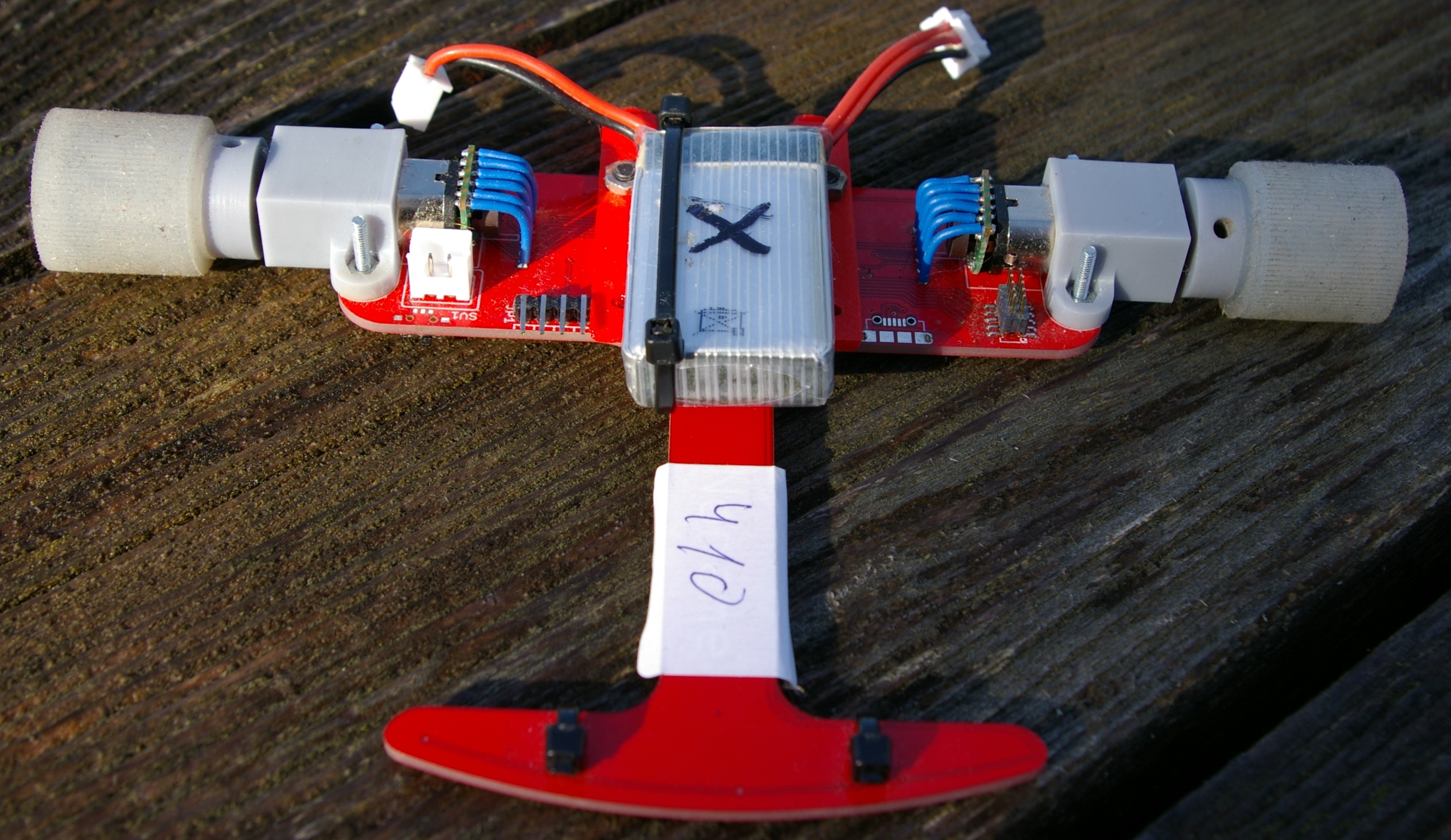
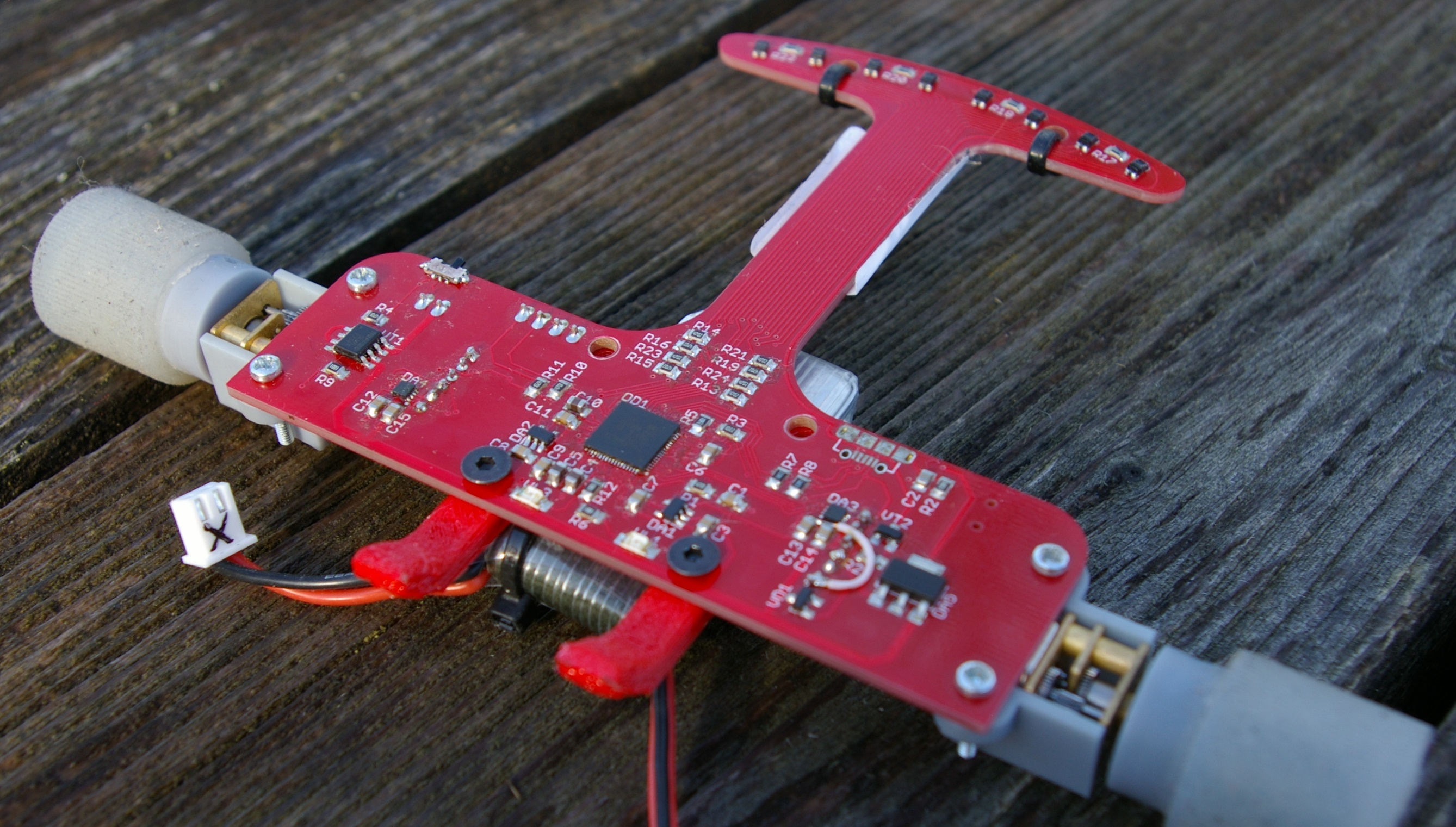
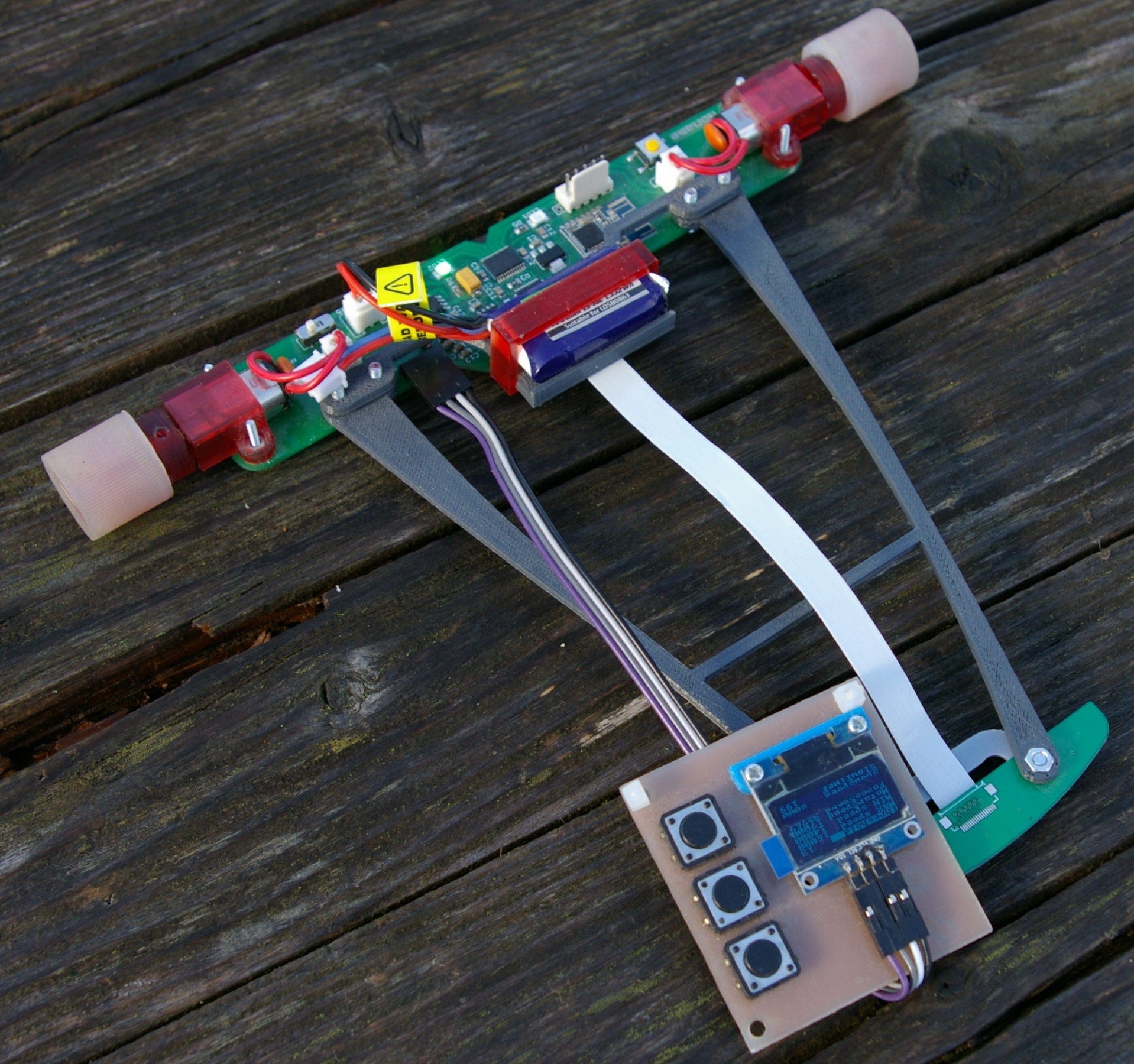
ąĪą┐ą░čüąĖą▒ąŠ, čćč鹊 ąĮąĄ ą┐ąĄčĆąĄčüčéą░čæč鹥 ą┐čāą▒ą╗ąĖą║ąŠą▓ą░čéčī čüą▓ąŠąĖ ą┐čĆąĖą║ą╗čÄč湥ąĮąĖčÅ. ą×č湥ąĮčī ąĖąĮč鹥čĆąĄčüąĮąŠ, čćąĖčéą░čÄ ą║ą░ą║ ą┤ąĄč鹥ą║čéąĖą▓, ą┐ąŠąČą░ą╗čāą╣čüčéą░ ąĮąĄ ą▒čĆąŠčüą░ą╣č鹥 ą┐ąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ. ąĪ ą┐ąŠą┤ąŠą▒ąĮčŗą╝ąĖ ą┐čĆąŠą▒ą╗ąĄą╝ą░ą╝ąĖ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ čüčéą░ą╗ą║ąĖą▓ą░ą╗čüčÅ, ą┐ąŠčŹč鹊ą╝čā čĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄą┤ą╗ąŠąČąĖčéčī ąĮąĄ ą╝ąŠą│čā. ąÆ ą┐ą╗ą░ąĮąĄ Robotics - čā ą╝ąĄąĮčÅ čŹčéąĖą╝ ą╗ąĄč鹊ą╝ ą▒čŗą╗ ą┐čĆąŠąĄą║čé čüąŠ čüčéčāą┤ąĄąĮč鹊ą╝ - ąŠąĮ čĆąĄčłąĖą╗ čüą┤ąĄą╗ą░čéčī čłą░ą│ą░čÄčēąĄą│ąŠ čĆąŠą▒ąŠčéą░. ąĪą░ą╝ ąŠąĮ ąĖąĘ ąÆčīąĄčéąĮą░ą╝ą░, ą▓ą┐čĆąŠč湥ą╝ čŹč鹊 ąĮąĄą▓ą░ąČąĮąŠ, ą░ ą▓ą░ąČąĮąŠ ą╗ąĖčłčī č鹊, čćč鹊 ąĮąĄčüą╝ąŠčéčĆčÅ ąĮą░ ą▓ąĖčĆčāčü ąŠčüčéą░ą╗čüčÅ ąĮą░ ą╗ąĄč鹊 ąČąĖčéčī ą▓ ąŠą▒čēą░ą│ąĄ ąĖ ą┤ąŠą╝ąŠą╣ ąĮąĄ ą┐ąŠąĄčģą░ą╗. ąÜąŠčĆąŠč湥, ąĖąĘ-ąĘą░ ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣ ą┤ąŠčüčéčāą┐ą░ ą║ čĆąĄčüčāčĆčüaą╝ ąĮą░ ą║ą░ą╝ą┐čāčüąĄ (čéą░ą║ąČąĄ ąĖąĘ-ąĘą░ ą▓ąĖčĆčāčüą░) ąŠąĮ ą┐ąŠą┤ čŹč鹊 ą┤ąĄą╗ąŠ ą┤ą░ąČąĄ ą║čāą┐ąĖą╗ čüąĄą▒ąĄ ąĖąĘ ą┐čĆąŠąĄą║čéąĮčŗčģ ą┤ąĄąĮąĄą│ 3ąö ą┐čĆąĖąĮč鹥čĆ ą┤ą╗čÅ ą▓čŗą┐ąĄčćą║ąĖ ą┤ąĄčéą░ą╗ąĄą╣. ąÆąŠčé ą▓ąĖą┤ąĄąŠ ą┐ąĄčĆą▓čŗčģ čłą░ą│ąŠą▓ čĆąŠą▒ąŠčéą░. ą£čŗ ąĄą│ąŠ čüčĆą░ąĘčā ąĘą░ą┤čāą╝čŗą▓ą░ą╗ąĖ čüą┤ąĄą╗ą░čéčī ąĮą░ čüąĖą╗ą╗ą░ą▒ąŠą▓čüą║ąŠą╝ Bluetooth ą╝ąŠą┤čāą╗ąĄ, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ čāą┐čĆą░ą▓ą╗čÅčéčī čĆąŠą▒ąŠč鹊ą╝ čü č鹥ą╗ąĄč乊ąĮą░. ąÆąŠčé čüčģąĄą╝ą░: ąĪą┐ąŠą╣ą╗ąĄčĆ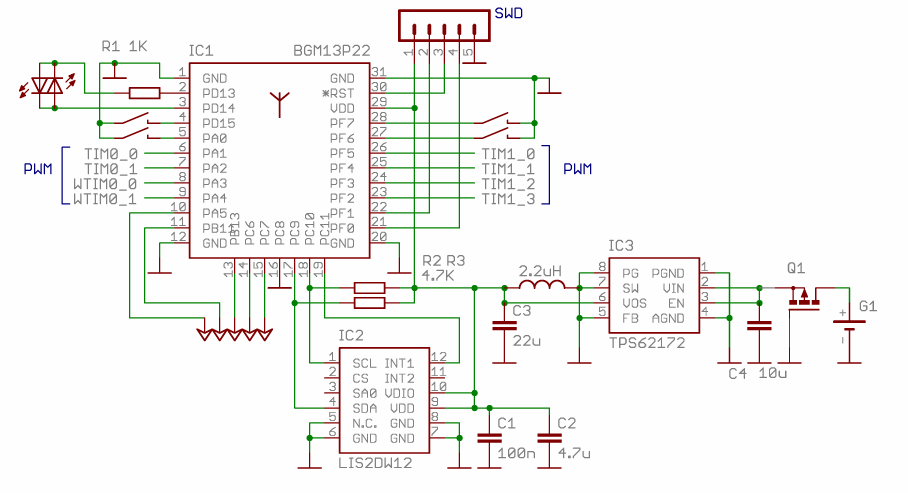 ą£ąŠą┤čāą╗čī ą│ąĄąĮąĄčĆąĖčĆčāąĄčé 8 ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą©ąśą£ ą║ą░ąĮą░ą╗ąŠą▓ ą┤ą╗čÅ čüąĄčĆą▓. ąÆčŗą▓ąŠą┤čŗ čüąŠ čüčéčĆąĄą╗ą║ą░ą╝ąĖ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ ąĮą░ ą▒čāą┤čāčēąĄąĄ. ąÉą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆ ąĮą░ ą┐ą╗ą░č鹥 ą┐čĆąŠč鹥čüčéąĖčĆąŠą▓ą░ą╗ąĖ, ąĮąŠ ą┐ąŠą║ą░ ąĮąĄ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ą╗ąĖ, čéą░ą║ąČąĄ ą║ą░ą║ ąĖ ą║ąĮąŠą┐ą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĄą┤ą╗ą░ą│ą░ą╗ąŠčüčī ąĘą░ą║čĆąĄą┐ąĖčéčī ąĮą░ ą║ąŠąĮčåą░čģ ąĮąŠą│ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąŠą╝ąĄąĮčéą░ ą║ą░čüą░ąĮąĖčÅ ąĘąĄą╝ą╗ąĖ. ąöą╗čÅ ą┐čĆąŠčüčéčŗčģ čłą░ą│ąŠą▓ ą║ą░ą║ ąĮą░ ą▓ąĖą┤ąĄąŠ čŹč鹊 ąĮąĄ ąĮčāąČąĮąŠ, ąĮąŠ ą╝čŗ čģąŠč鹥ą╗ąĖ čćč鹊-č鹊 čéąĖą┐ą░ čéą░ąĮčåąĄą▓ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī, čģąŠčéčÅ ąĖ ąĮąĄ čāčüą┐ąĄą╗ąĖ. ą£ąŠą┤čāą╗čī ą┐ąŠą▓čæą╗ čüąĄą▒čÅ ąĖą┤ąĄą░ą╗čīąĮąŠ, ą┐ąŠčģąŠąČąĄ, čŹč鹊 ą▒čŗą╗ąŠ ą┐čĆą░ą▓ąĖą╗čīąĮąŠąĄ čĆąĄčłąĄąĮąĖąĄ ą┤ąĄą╗ą░čéčī ą▓čüčæ ąĮą░ ąĮčæą╝. ąØą░ą┐ąĖčüą░ą╗ ąĖą┤ąĄą░ą╗čīąĮąŠ, ą┐ąŠč鹊ą╝čā čćč鹊, ąĮąĄčüą╝ąŠčéčĆčÅ ąĮą░ ą║ąŠčĆčÅą▓čŗą╣ ą║ąŠą┤ čüčéčāą┤ąĄąĮčéą░, ąŠąĮ ą▓ąĄčüčīą╝ą░ ą╗ąĖčģąŠ čüą┐čĆą░ą▓ą╗čÅą╗čüčÅ čü ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄą╝ čéčĆąĖą│ ąĖ ąŠą▒čĆą░čéąĮčŗčģ čéčĆąĖą│ čäčāąĮą║čåąĖą╣ ą┤ą╗čÅ čüąĄčĆą▓ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ (čü ą┤ąĄč乊ą╗čéąĮčŗą╝ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ą╝ąĖ), ąĖ ą▓čüčæ čŹč鹊 ą┤ą░ąČąĄ ąĮąĄ ą╝ąĄčłą░ą╗ąŠ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÄ Bluetooth čüč鹥ą║ą░. ą¤ąĄčĆąĄą┤ą░čéčćąĖą║ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ą╗ąĖ ąĮą░ Thunderboard-2 ą┤ąĄą╝ąŠ-ą┐ą╗ą░č鹥, ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░ą╗ąĖ ąĮą░ą┐ąĖčüą░čéčī Android ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ, ąĮąŠ č鹊ąČąĄ ąĮąĄ čāčüą┐ąĄą╗ąĖ ą┐ąŠą║ą░. ą×ą┤ąĮą░ą║ąŠ, ą║ąŠąĄ-ą║ą░ą║ čāą┐čĆą░ą▓ą╗čÅčéčī ą╝ąŠąČąĮąŠ čü č鹥ą╗ąĄč乊ąĮą░ ąĖ čüąĄą╣čćą░čü, ąĘą░ą┐ąĖčüčŗą▓ą░čÅ ą║ąŠą╝ą░ąĮą┤čŗ ą▓ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║čā ą┐čĆąŠčäąĖą╗čÅ, ąĮą░ą┐čĆąĖą╝ąĄčĆ, č湥čĆąĄąĘ čüčéą░ąĮą┤ą░čĆčéąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ EFR Connect. ąøąŠčģą░ąĮčāą╗ąĖčüčī ą╝čŗ čüąĖą╗čīąĮąŠ ą╗ąĖčłčī čü 6.4ąÆ ą▒ą░čéą░čĆąĄąĄą╣ ąĖ čĆą░ąĘą╝ąĄčĆą░ą╝ąĖ. ąśąĘ-ąĘą░ ą┐ąŠčüą╗ąĄą┤ąĮąĖčģ (č鹊čćąĮąĄąĄ ą▓ąĄčüą░) 菹ĮąĄčĆą│ąĖąĖ ą▒ą░čéą░čĆąĄąĖ ąĮą░ čüą║ąŠą╗čī-ąĮąĖą▒čāą┤čī ą┐čĆąŠą┤ąŠą╗ąČąĖč鹥ą╗čīąĮąŠąĄ čłą░ą│ą░ąĮąĖąĄ ąĮąĄ čģą▓ą░čéą░ąĄčé, čüąĄčĆą▓čŗ ąČčĆčāčé ąĮąĄą┐ąŠą╝ąĄčĆąĮąŠ, ą┐ąŠčŹč鹊ą╝čā ą┐ąŠą║ą░ ą┐ąĖčéą░ąĄą╝ čĆąŠą▒ąŠčéą░ č湥čĆąĄąĘ čüąĄč鹥ą▓ąŠą╣ ą░ą┤ą░ą┐č鹥čĆ. ąØą░ą┤ąŠ ą▒čāą┤ąĄčé ą▒ąŠą╗ąĄąĄ ą╝ąŠčēąĮčāčÄ ąĖ ą╗ąĖčéąĖąĄą▓čāčÄ ą▒ą░čéą░čĆąĄčÄ ą┐ąŠčüčéą░ą▓ąĖčéčī. ąŻą┤ąĖą▓ąĖč鹥ą╗čīąĮąŠ, čćč鹊 ąĮąĄčüą╝ąŠčéčĆčÅ ąĮą░ čĆą░ą▒ąŠčéčā čüčéčāą┤ąĄąĮčéą░ ą▒ąĄąĘ ą┐čĆąĖčüą╝ąŠčéčĆą░ ąĮą░ čāą┤ą░ą╗čæąĮą║ąĄ ąĖ ąĮąĄą▒ąŠą╗čīčłąŠą╣ ąĄą│ąŠ ąŠą┐čŗčé, ąĮą░ ą┐ą╗ą░č鹥 ąĮąĖč湥ą│ąŠ ąĮąĄ čüą│ąŠčĆąĄą╗ąŠ (čüčéčāčćčā ą┐ąŠ ą┤ąĄčĆąĄą▓čā). ąĢčēčæ čŹčéąĖą╝ ą╗ąĄč鹊ą╝ čĆą░ą▒ąŠčéą░ą╗ čü ąĮąŠą▓čŗą╝ąĖ (ą┤ą╗čÅ ą╝ąĄąĮčÅ) Bluetooth ą╝ąŠą┤čāą╗čÅą╝ąĖ BL652 (Nordic), BlueNRG (ST), ąĖ DA14531 (Dialog). ą¤ąŠčüą╗ąĄą┤ąĮąĖąĄ ąĮąŠą▓čŗąĄ ąĮąĄ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą╝ąĄąĮčÅ, ą░ ą┐čĆąŠ ą┐ąĄčĆą▓čŗąĄ ąĮą░ą┐ąĖčüą░ą╗ čüčéą░čéčīčÄ ąĘą┤ąĄčüčī. ą¤ąŠč湥ą╝čā-č鹊 ą┐ąŠą╗ąŠą▓ąĖąĮąĄ ą┐čĆąŠą│ąŠą╗ąŠčüąŠą▓ą░ą▓čłąĖčģ ąŠąĮą░ ąĮąĄ ą┐ąŠąĮčĆą░ą▓ąĖą╗ą░čüčī, čģąŠčéčÅ ą╝ąĮąĄ ą╝ąŠą┤čāą╗ąĖ ą┐ąŠąĮčĆą░ą▓ąĖą╗ąĖčüčī ąŠč湥ąĮčī. ą¤ąŠčüą╗ąĄ čüčéą░čéčīąĖ ąĘą░ąĮąĖą╝ą░ą╗čüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ąĖčģ ąĮą░ ąĪ ą▓ čüčĆąĄą┤ąĄ Segger Embedded Studio. ąÆ ąŠą▒čēąĄą╝, ąĮąĖč湥ą│ąŠ, ąČąĖčéčī čü ąĮąĖą╝ąĖ ą╝ąŠąČąĮąŠ. ą¤ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÄ ąŠąĮąĖ ą╗čāčćčłąĄ BGM13, ąĮąŠ ą┐ąŠčüą╗ąĄ ą▓čŗą┐čāčüą║ą░ BGM22 ąŠčüąŠą▒ąŠą│ąŠ čüą╝čŗčüą╗ą░ ą▓ ąĮąĖčģ ą▓ čŹč鹊ą╝ ą┐ą╗ą░ąĮąĄ ąĮąĄ ą▓ąĖąČčā. ą×ą┤ąĮą░ą║ąŠ, ąŠąĮąĖ ą╝ąĄąĮčīčłąĄ ą┐ąŠ čĆą░ąĘą╝ąĄčĆą░ą╝ ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┤ąĄčłąĄą▓ą╗ąĄ čüąĖą╗ą╗ą░ą▒ąŠą▓čüą║ąĖčģ, ąŠčüąŠą▒ąĄąĮąĮąŠ ąĄčüą╗ąĖ ą┤ąŠčüčéą░č鹊čćąĮąŠ BL651. ąŻą┐ąŠą╝čÅąĮčāčéčŗąĄ ą╝ąŠą┤čāą╗ąĖ ąŠčé ST, ą┐ąŠčģąŠąČąĄ, čüą║ąŠčĆąŠ čüą│ąĖąĮčāčé ą▓ ą╗ąĄčéčā ąĖąĘ-ąĘą░ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ, ąĮąĄčüą╝ąŠčéčĆčÅ ąĮą░ ąŠč湥ąĮčī ą╗ąŠą│ąĖčćąĮčŗąĄ API (ą┐čĆąŠą▒ąŠą▓ą░ą╗ ąĖčģ ą┐ąŠą┤ Keil, ą┤ą░ąČąĄ ą│ą┤ąĄ-č鹊 ą┐ąŠąĮčĆą░ą▓ąĖą╗ąŠčüčī). ą×ą┤ąĮą░ą║ąŠ, čéą░ą║ąŠą│ąŠ čāą┤ąŠą▒čüčéą▓ą░ čü čĆą░ąĘčĆą░ą▒ąŠčéą║ąŠą╣ Bluetooth ą║ą░ą║ čā čüąĖą╗ą╗ą░ą▒ąŠą▓ ąĮąĄčé ąĮąĖ čā ą║ąŠą│ąŠ. ąÆą┐čĆąŠč湥ą╝, ąŠąĮąĖ ąŠą▒čĆą░ą┤ąŠą▓ą░ą╗ąĖ, čćč鹊 čü ą▓čŗą┐čāčüą║ąŠą╝ ą▓ čüąĄąĮčéčÅą▒čĆąĄ čĆąĄą╗ąĖąĘą░ ą▓ąĄčĆčüąĖąĖ 5 ąĪčéčāą┤ąĖąŠ, ą┐čĆąĄą┤čŗą┤čāčēąĖąĄ ą┐čĆąŠąĄą║čéčŗ ą┐ąŠą┤ ąĮąĄčæ čüą╗ąĄą┤čāąĄčé ą░ą┤ą░ą┐čéąĖčĆąŠą▓ą░čéčī čĆčāą║ą░ą╝ąĖ, ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čŹč鹊 ąĮąĄ ą┤ąĄą╗ą░ąĄčéčüčÅ. ą» čāąČąĄ ąĮą░čćąĖąĮą░čÄ čāčüčéą░ą▓ą░čéčī ąŠčé čŹč鹊ą│ąŠ. ąĪ ąöąĖą░ą╗ąŠą│ąŠą▓čüą║ąĖą╝ąĖ ą╝ąŠą┤čāą╗čÅą╝ąĖ čĆą░ąĘą│ąŠą▓ąŠčĆ ąĮąĄ ąŠą║ąŠąĮč湥ąĮ. ą» ą┤ąŠą╗ą│ąŠąĄ ą▓čĆąĄą╝čÅ ąŠą▒čēą░ą╗čüčÅ čü ąĖčģ čüą╗čāąČą▒ąŠą╣ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ, ą┐čŗčéą░čÅčüčī čāą▒ąĄą┤ąĖčéčī ąĖčģ ąŠ ą▒ą░ą│ąĄ ą▓ ąĖčģ čüč鹥ą║ąĄ. ąØą░ą║ąŠąĮąĄčå, ą╝ąĮąĄ čŹč鹊 čāą┤ą░ą╗ąŠčüčī, ąĮąŠ ą┐ąŠą║ą░ ąĖčüą┐čĆą░ą▓ą╗ąĄąĮąĮąŠą╣ ą▓ąĄčĆčüąĖąĖ ąĮąĄčé. ąŁčéąĖ ą╝ąŠą┤čāą╗ąĖ ąĖą┤ąĄą░ą╗čīąĮąŠ ą┐ąŠą┤čģąŠą┤čÅčé ą┤ą╗čÅ ą╝ą░ą╗čŗčģ ą┐čĆąŠąĄą║č鹊ą▓, ąĖą╝ąĄčÄčé ąĘą░ą╝ąĄčćą░č鹥ą╗čīąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┐ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÄ ąĖ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ ąĮąŠą│ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāčÄčéčüčÅ ą▓ čüąŠą▒čüčéą▓ąĄąĮąĮąŠą╣ čüčĆąĄą┤ąĄ, ą┤ą░ąČąĄ čüčĆą░ąĘčā ą┐ąŠą┤ RTOS, ąĮąŠ, ą║ čüąŠąČą░ą╗ąĄąĮąĖčÄ, ą┐ąŠą┤ ą║ą░ą║ąŠą╣-č鹊 ąĮąĄą▓ąĄą┤ąŠą╝ąŠą╣. ąÆą┐čĆąŠč湥ą╝, čäąĖčĆą╝ą░ ą┐čĆąĄą┤ą╗ą░ą│ą░ąĄčé čĆąĄčłąĄąĮąĖčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ čāą┐čĆąŠčēčæąĮąĮąŠą│ąŠ ąĖčģ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ "ą▒ąĄąĘ ąĮą░ą┐ąĖčüą░ąĮąĖčÅ ą║ąŠą┤ą░" (codeless), ą┐ąŠčüą╝ąŠčéčĆąĖą╝, ą╝ąŠąČąĄčé ąĮą░ą┐ąĖčłčā čüčéą░čéčīčÄ ą┐čĆąŠ ąĮąĖčģ. ą¤ąŠčüą╗ąĄą┤ąĮąĄąĄ - ąĮą░čł čü čüčŗąĮąŠą╝ ą┐čĆąŠąĄą║čé čćą░čüąŠą▓ ąĮą░ čüą░ą╣ą┐čĆąŠą▓čüą║ąŠą╝ PSoC-4 BLE ą╝ąŠą┤čāą╗ąĄ čü ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▓čĆąĄą╝ąĄąĮąĖ čüąŠ čüą╝ą░čĆčéč乊ąĮą░. ąŻąČąĄ čüą┤ąĄą╗ą░ą╗ ąĮąĄčüą║ąŠą╗čīą║ąŠ čéą░ą║ąĖčģ ą┤ą╗čÅ ą┤čĆčāąĘąĄą╣, ąĮą░ą┤ąŠ ą▒čāą┤ąĄčé ą┐čĆąŠ ą║ąŠčĆą┐čāčü ą┐ąŠą┤čāą╝ą░čéčī.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
uldemir
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą░ą▓ą│ 20, 2020 07:13:41 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214
ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
|
ą©ą░ą│ąŠčģąŠą┤ ąĖąĮč鹥čĆąĄčüąĮčŗą╣. ąĢčēąĄ ąĖąĮč鹥čĆąĄčüąĮąĄą╣, ą║ą░ą║ ąŠąĮ ą▒čāą┤ąĄčé ą┐ąŠą▓ąŠčĆą░čćąĖą▓ą░čéčī. ąÆčĆąŠą┤ąĄ ą║ą░ą║ čüč鹊čÅ ąĮą░ 3 č鹊čćą║ą░čģ ąŠąĮ ą╝ąŠąČąĄčé ą▓čŗą┐ąŠą╗ąĮąĖčéčī ąĮąĄą▒ąŠą╗čīčłąŠą╣ ą┐ąŠą▓ąŠčĆąŠčé ą║ąŠčĆą┐čāčüą░. ąØąŠ čŹč鹊 ąĮą░ą┤ąŠ čāą│ą╗čāą▒ą╗čÅčéčīčüčÅ ą▓ ą┐čĆąŠą▒ą╗ąĄą╝čā. ą¤ąŠą║ą░ ą▓ ą┐čĆąŠą▒ą╗ąĄą╝čā ąĮąĄ čāą│ą╗čāą▒ąĖą╗čüčÅ, ą▓čüčæ ą║ą░ąČąĄčéčüčÅ ą┐čĆąŠčüčéčŗą╝.
ą» čéčāčé ą▓ą╝ąĄčüč鹊 ąĮąŠą▓čŗčģ ą╝ąŠą┤čāą╗ąĄą╣ ąŠčüą▓ą░ąĖą▓ą░ą╗ čüčéą░čĆčŗąĄ. ąÜąŠą╗ą╗ąĄą│ą░ čéčāčé, ąĮąĄ ąĖąĘčāčćąĖą▓ ą▓ąŠą┐čĆąŠčüą░ ąĘą░ą║čāą┐ąĖą╗ BT ą╝ąŠą┤čāą╗ąĖ HC-06 (čŹč鹊 ąĄčēąĄ Basic Rate) ąĖ ą┐čĆąŠčüąĖą╗ ą┐ąŠą╝ąŠčćčī ąĖčģ čüą▓čÅąĘą░čéčī. ąÆčŗčÅčüąĮąĖą╗ąŠčüčī, čćč鹊 HC-06 čĆą░ąĘąĮčŗčģ ąĄčüčéčī ą▓ą░ą│ąŠąĮ ąĖ ąĄčēąĄ ąŠą┤ąĮą░ č鹥ą╗ąĄąČą║ą░. ąś ą┐ąŠą║ą░ ą┐ąŠą┤ąŠą▒čĆą░ą╗ąĖ, ąĮą░ ą║ą░ą║ąŠą╣ čüąĖąĮčéą░ą║čüąĖčü ą║ąŠą╝ą░ąĮą┤ ąŠąĮąŠ ąŠčéą▓ąĄčćą░ąĄčé, ą┐ąŠčéčĆą░čéąĖą╗ąĖ ą╝ąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ. ąś ąŠą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 "ąĮąŠą▓čŗąĄ" HC-06 ą╝ą░čüč鹥čĆąŠą╝ čĆą░ą▒ąŠčéą░čéčī ąĮąĄ ą╝ąŠą│čāčé, ąĮą░ą┤ąŠ ąØąĪ-05. ąŚą░č鹊, čÅ ą▓čŗčéą░čēąĖą╗ ąĖąĘ čüą▓ąŠąĖčģ ąĘą░ą║čĆąŠą╝ąŠą▓ čüčéą░čĆčŗą╣ ą╝ąŠą┤čāą╗čī, ą║čāą┐ą╗ąĄąĮąĮčŗą╣ ą▒ąŠą╗ąĄąĄ 10 ą╗ąĄčé ąĮą░ąĘą░ą┤. ą×ą┐ąŠąĘąĮą░ą▓ą░č鹥ą╗čīąĮčŗčģ ąĘąĮą░ą║ąŠą▓ ąĮą░ ąĮčæą╝ ąĮąĄčé, ąĮą░ čüąĖąĮčéą░ą║čüąĖčü č鹥čģ HC-06 ąĮąĄ čĆąĄą░ą│ąĖčĆčāąĄčé... ąĮąŠ čāą┤ą░ą╗ąŠčüčī ą║ąŠąĄ ą║ą░ą║ ą┐ąŠą┤ąŠą▒čĆą░čéčī ą║ ąĮąĄą╝čā ą┐ąŠą┤čģąŠą┤. ą×ą║ą░ąĘą░ą╗ąŠčüčī, čŹč鹊 čüčéą░čĆčŗą╣ HC-06, ą║ąŠč鹊čĆąŠą╝čā ą▓čüčæ ąČąĄ ą╝ąŠąČąĮąŠ ąĖąĘą╝ąĄąĮąĖčéčī čĆąŠą╗čī ąĮą░ ą╝ą░čüč鹥čĆ ąĖ č鹊ą│ą┤ą░ čāą┤ą░ą╗ąŠčüčī čüčåąĄą┐ąĖčéčī čüčéą░čĆčŗą╣ HC-06, ą║ą░ą║ ą╝ą░čüč鹥čĆ čü ąĮąŠą▓čŗą╝ HC-06, ą║ą░ą║ ą▓ąĄą┤ąŠą╝čŗą╝.
ąźąŠč鹥ą╗ ą▒čŗą╗ąŠ ą┐ąŠąČą░ą╗ąŠą▓ą░čéčīčüčÅ, čćč鹊 čüčéčĆąŠąĖčéčī ą▒ąĄąĘčåąĄą╗čīąĮąŠ čĆąŠą▒ąŠčéčŗ ą┐čĆąŠą┐ą░ą┤ą░ąĄčé ąĖąĮč鹥čĆąĄčü, čéą░ą║ ą║ą░ą║ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖą╣, ą╝ąŠąČąĄčé, ą▒ąŠą╗čīčłąĄ ąĮąĄ ą▒čāą┤ąĄčé... ą×ą┤ąĮą░ą║ąŠ, č鹊ą╗čīą║ąŠ čćč鹊 ąĘą░ą╝ąĄčéąĖą╗, čćč鹊 ą┐ąŠčÅą▓ąĖą╗ą░čüčī ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ čüą╗ąĄą┤čāčÄčēąĄą╝ č湥ą╝ą┐ąĖąŠąĮą░č鹥. ąĪąĮąŠą▓ą░ ą▒čāą┤ąĄčé ą┐čĆąŠčģąŠą┤ąĖčéčī ą▓ 6 čŹčéą░ą┐ąŠą▓, ąĖ ą┐ąĄčĆą▓čŗą╣ čŹčéą░ą┐, ą║ą░ą║ ąĖ ą▓ ą┐čĆąŠčłą╗ąŠą╝ ą│ąŠą┤čā, ą▒čāą┤ąĄčé ą▓ ą┐ąĄčĆą▓čāčÄ čüčāą▒ą▒ąŠčéčā čüąĄąĮčéčÅą▒čĆčÅ. ąĪąĮąŠą▓ą░ ą╝ąĮąŠą│ąĖąĄ čłą║ąŠą╗čŗ ą▒čāą┤čāčé ąĮąĄą┤ąŠą▓ąŠą╗čīąĮčŗ. ą¤čĆą░ą▓ą┤ą░, ą▓čŗčÅčüąĮąĖą╗ąŠčüčī, čćč鹊 čÅ ąĮąĄ ąĮą░ čéčā ą╗ąŠčłą░ą┤ą║čā ą┐ąŠčüčéą░ą▓ąĖą╗. ąÆ čŹč鹊ą╝ ą│ąŠą┤čā ą▓ ąĢą╗ą│ą░ą▓ąĄ ąĮąĄ ą▒čāą┤ąĄčé ą╗ą░ą▒ąĖčĆąĖąĮčéą░. ąæčāą┤čāčé č鹊ą╗čīą║ąŠ ą▒ą░ąĘąŠą▓čŗąĄ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅ: Sumo, Folkrace, LineFollower. ąØčā, ą╝ąŠąČąĄčé, ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąĄčēąĄ ąĖąĘą╝ąĄąĮąĖčéčüčÅ, ą┐ąŠč鹊ą╝čā ą║ą░ą║ čéą░ą▒ą╗ąĖčåą░ čüą║ąŠčĆąĄąĄ ą┐čāčüčéą░čÅ, č湥ą╝ ą┐ąŠą╗ąĮą░čÅ. ąśąĘ 6 čŹčéą░ą┐ąŠą▓ ąĄčüčéčī ąĖąĮč乊čĆą╝ą░čåąĖčÅ č鹊ą╗čīą║ąŠ ą┐čĆąŠ 2 (ąĖ ąĮąĖ ą▓ ąŠą┤ąĮąŠą╝ ą┐ąŠą║ą░ ąĮąĄčé ą╗ą░ą▒ąĖčĆąĖąĮčéą░). ą×čüčéą░ą╗čīąĮčŗąĄ čüč鹊ą╗ą▒ąĖą║ąĖ ą┐ąŠą║ą░ ą┐čāčüčéčŗąĄ.
ąóą░ą║ čćč鹊 ąĮčāąČąĮąŠ ą▒čĆąŠčüą░čéčī ą╗ą░ą▒ąĖčĆąĖąĮčé ąĖ ąĮą░čćąĖąĮą░čéčī čüąĄčĆčīčæąĘąĮąŠ ąĘą░ąĮąĖą╝ą░čéčīčüčÅ LineFollower-ąŠą╝.
_________________
ąÉ ą╗čÄą┤ąĖ ą┐ąŠčüą╝ąŠčéčĆčÅčé ąĖ čüą║ą░ąČčāčé: "ąĪąŠą▒ą░ą║ąĖ ą╗ąĄčéčÅčé. ąÆąŠčé ąĖ ąŠčüąĄąĮčī."
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
Ser60
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¦čé ą░ą▓ą│ 20, 2020 20:50:22 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 74
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 607
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ąĪčĆ ą┤ąĄą║ 24, 2008 09:58:58
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3715
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 3
|
ą”ąĖčéą░čéą░: ą║ą░ą║ ąŠąĮ ą▒čāą┤ąĄčé ą┐ąŠą▓ąŠčĆą░čćąĖą▓ą░čéčī ąźąŠčĆąŠčłąĖą╣ ą▓ąŠą┐čĆąŠčü. ą¤ąŠą║ą░ ą╝čŗ ąĮąĄčüą║ąŠą╗čīą║ąŠ čāą╝ąĄąĮčīčłą░ą╗ąĖ ą┤ą╗ąĖąĮčā čłą░ą│ą░ ąĮą░ ąŠą┤ąĮąŠą╣ ąĖąĘ čüč鹊čĆąŠąĮ, ą┐čĆąĖ čŹč鹊ą╝ čĆą░ą┤ąĖčāčü ą┐ąŠą▓ąŠčĆąŠčéą░ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą▒ąŠą╗čīčłąĄ, č湥ą╝ čģąŠč鹥ą╗ąŠčüčī-ą▒čŗ. ąŁč鹊 ąĮčāąČąĮąŠ ąĄčēčæ ą┤ąŠčĆą░ą▒ą░čéčŗą▓ą░čéčī. ą¤ąŠ-čģąŠčĆąŠčłąĄą╝čā čüą╗ąĄą┤čāąĄčé ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą┐ąĄčĆąĄą┤ąĄą╗ą░čéčī čłą░čüčüąĖ, čāą╝ąĄąĮčīčłąĖą▓ čĆą░ąĘą╝ąĄčĆčŗ. ąĪ ą┐ąĄčĆą▓ąŠą│ąŠ ą▓čŗčüčéčĆąĄą╗ą░ čéą░ą║ąĖąĄ ą┐čĆąŠąĄą║čéčŗ ąĮąĄ ą┤ąĄą╗ą░čÄčéčüčÅ. ąØąŠ čüąĄą╣čćą░čü ąĮą░čćąĖąĮą░ąĄčéčüčÅ čāč湥ą▒ąĮčŗą╣ ą│ąŠą┤, ą┤čāą╝ą░čÄ, čüčéčāą┤ąĄąĮčéčā ą▒čāą┤ąĄčé ąĮąĄ ą┤ąŠ čĆąŠą▒ąŠč鹊ą▓, č鹥ą╝ ą▒ąŠą╗ąĄąĄ, čćč鹊 ąŠąĮ čāčćą░čüčéą▓čāąĄčé ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą╝ąĄąČčāąĮąĖą▓ąĄčĆčüąĖč鹥čéčüą║ąŠą│ąŠ ąŠą▒ą╝ąĄąĮą░ ąĖ ą┐čĆąŠą▓ąĄą┤čæčé čŹč鹊čé čüąĄą╝ąĄčüčéčĆ ą▓ ą┤čĆčāą│ąŠą╝ ą║ą░ą╝ą┐čāčüąĄ.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
uldemir
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąĪą▒ čüąĄąĮ 05, 2020 21:16:42 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214
ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
ąŻą┤ą░čĆąĖą╝ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅą╝ąĖ čĆąŠą▒ąŠč鹊ą▓ ą┐ąŠ ą┐ą░ąĮą┤ąĄą╝ąĖąĖ. ąśą╗ąĖ: "ą▓ąŠą┐čĆąĄą║ąĖ covid-19 čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅ ą▓čüčæ ąČąĄ ą┐čĆąŠčłą╗ąĖ". ąöą░ąČąĄ ąĮąĄ ąĘąĮą░čÄ, ą║ą░ą║ąŠą╣ ąĘą░ą│ąŠą╗ąŠą▓ąŠą║ ą╗čāčćčłąĄ. ą¤ąŠąĘą░ąĮąĖą╝ą░ą╗čüčÅ čÅ čéčāčé Linefollower-ąŠą╝. ąĀąĄčłąĖą╗ čĆą░čüčłąĖčĆąĖčéčī čüą▓ąŠčæ " čüąĄą║čĆąĄčéąĮąŠąĄ ąŠčĆčāąČąĖąĄ". ąóą░ą║ ą║ą░ą║ čā čĆąŠą▒ąŠčéą░ ąĮą░ PSoC5 ąĄčüčéčī čéą░čģąŠą┤ą░čéčćąĖą║ąĖ, č鹊 čĆąĄčłąĖą╗ ąĖčģ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░čéčī ą┤ą╗čÅ čāč湥čéą░ ą┐čĆąŠą╣ą┤ąĄąĮąĮąŠą│ąŠ čĆą░čüčüč鹊čÅąĮąĖčÅ. ąÉ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąŠčłąĖą▒ą║ą░ ąĮąĄ ąĮą░ą║ą░ą┐ą╗ąĖą▓ą░ą╗ą░čüčī ą║ ą║ąŠąĮčåčā čéčĆą░čüčüčŗ, čĆąĄčłąĖą╗, čćč鹊 čéą░čģąŠą┤ą░čéčćąĖą║ą░ą╝ąĖ čÅ ą▒čāą┤čā ąĖąĘą╝ąĄčĆčÅčéčī čĆą░čüčüč鹊čÅąĮąĖčÅ ąŠčé ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┐ąĄčĆąĄčüąĄč湥ąĮąĖčÅ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ąŠčłąĖą▒ą║ą░ ą╝ąŠąČąĄčé ąĮą░ą║ą░ą┐ą╗ąĖą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ąŠą┤ąĮąŠą│ąŠ "čāčćą░čüčéą║ą░". ąÆąŠčé č鹊ą╗čīą║ąŠ ą┐čĆąŠą▒ą╗ąĄą╝ą░ ą║ą░ą║ ą▓čŗą┤ąĄą╗ąĖčéčī ą┐ąŠą┤ čŹč鹊 ą┤ąĄą╗ąŠ ą┐ą░ą╝čÅčéčī? ą¤ąŠą║ą░ čćč鹊 ą┐ąŠą┤čāą╝ą░ą╗, ą│ą╗čÅą┤čÅ ąĮą░ č乊č鹊 ą┐čĆąŠčłą╗ąŠą│ąŠą┤ąĮąĄą╣ čéčĆą░čüčüčŗ, čćč鹊 ą┤ąŠčüčéą░č鹊čćąĮąŠ ąŠą┤ąĖąĮ "čāčćą░čüč鹊ą║" čĆą░ąĘą▒ąĖą▓ą░čéčī ąĮą░ 4 ą┐ąŠą┤-čāčćą░čüčéą║ą░. ąó.ąĄ. ą╝ąĮąĄ ąĮčāąČąĮąŠ čäąĖą║čüąĖčĆąŠą▓ą░čéčī ą┤ąŠ čéčĆčæčģ čĆą░čüčüč鹊čÅąĮąĖą╣. ąöą╗čÅ čāčćą░čüčéą║ąŠą▓ čĆąĄčłąĖą╗ ą▓čŗą┤ąĄą╗ąĖčéčī ą╝ąĄčüč鹊 ą┤ą╗čÅ 10 (ą┐ąŠą║ą░ čéčĆą░čüčüą░ ąĖą╝ąĄčÄčēą░čÅ ąĮą░ąĖą▒ąŠą╗čīčłąĄąĄ čćąĖčüą╗ąŠ ą┐ąĄčĆąĄčüąĄč湥ąĮąĖą╣ ą▓ TSI - 4, čćč鹊 ą┤ą░čæčé 9 čāčćą░čüčéą║ąŠą▓). ąÜą░ąČą┤čŗą╣ ą┐ąŠą┤-čāčćą░čüč鹊ą║ čÅ ą║ąŠą┤ąĖčĆčāčÄ ą┤ą▓čāą╝čÅ ą▒ąĖčéą░ą╝ąĖ: čüč鹊ą┐, ą╝ą░ą╗ąĄąĮčīą║ą░čÅ čüą║ąŠčĆąŠčüčéčī, ą▒ąŠą╗čīčłą░čÅ čüą║ąŠčĆąŠčüčéčī ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī. ąŁčéąĖą╝ čÅ ąĮą░ą┤ąĄčÄčüčī ą▓čŗčćą╗ąĄąĮąĖčéčī ą┤ą╗ąĖąĮąĮčŗąĄ ą┐čĆčÅą╝čŗąĄ čāčćą░čüčéą║ąĖ, čćč鹊ą▒čŗ ąĖčģ ą┐čĆąŠčģąŠą┤ąĖčéčī ąĮą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ. ąÉ čéčāčé ąŠčĆą│ą░ąĮąĖąĘą░č鹊čĆčŗ ą┐ąŠą┤ą▒čĆąŠčüąĖą╗ąĖ ąĮąŠą▓ąŠą▓ą▓ąĄą┤ąĄąĮąĖąĄ. ąŁčéą░ą┐ ą▓ ąĪąĖą│čāą╗ą┤ąĄ čĆą░ąĘą▒ąĖą╗ąĖ ąĮą░ ą┤ą▓ąĄ čćą░čüčéąĖ. ą×ą┤ąĮą░ čćą░čüčéčī ą▒čāą┤ąĄčé čāąČąĄ ą▓ ąŠą║čéčÅą▒čĆąĄ ąĖ ą▒čāą┤čāčé čāčćą░čüčéą▓ąŠą▓ą░čéčī č鹊ą╗čīą║ąŠ čĆąŠą▒ąŠčéčŗ ą▓ ą║ą░č鹥ą│ąŠčĆąĖąĖ "菹╗ąĄą║čéčĆąŠąĮąĖą║ą░", ą░ ą▓ č乥ą▓čĆą░ą╗ąĄ - čĆąŠą▒ąŠčéčŗ ą║ą░č鹥ą│ąŠčĆąĖąĖ "ąøąĄą│ąŠ". ąś ąóą░ą║ ąČąĄ čĆą░ąĘą▒ąĖą╗ąĖ čŹčéą░ą┐ ą▓ ą¤čĆąĄą╣ą╗ąĖ: ąÆ ąĮą░čćą░ą╗ąĄ ąŠą║čéčÅą▒čĆčÅ ą▒čāą┤ąĄčé ąŠą┤ąĖąĮ čŹčéą░ą┐ ą┤ą╗čÅ "ąøąĄą│ąŠ" ą▓ "ąÜą░čĆą░ąĮą┤ą░čłąĄ" ą▓ ą│ąŠčĆąŠą┤ąĄ ąĀąĄąĘąĄą║ąĮąĄ, ą░ ą▓ čÅąĮą▓ą░čĆąĄ "菹╗ąĄą║čéčĆąŠąĮąĖą║ą░" ą▓ ą¤čĆąĄą╣ą╗ąĖ. ą», ąĄčüč鹥čüčéą▓ąĄąĮąĮąŠ, ąĮą░ "ąøąĄą│ąŠ" čŹčéą░ą┐čŗ ąĮąĄ ą┐ąŠąĄą┤čā. ąŁč鹊 čüą┤ąĄą╗ą░ąĮąŠ, čćč鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮčÅčéčī čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ąĘą░ą║ąŠąĮąŠą▓ ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ąĄ čāčćą░čüčéąĮąĖą║ąŠą▓ ą╝ą░čüčüąŠą▓čŗčģ ą╝ąĄčĆąŠą┐čĆąĖčÅčéąĖą╣ ą▓ čāčüą╗ąŠą▓ąĖčÅčģ ą┐ą░ąĮą┤ąĄą╝ąĖąĖ. ąÉ ą▓ąŠčé ą┐ąŠčüą╝ąŠčéčĆąĄą╗ ąĮą░ čéčĆą░čüčüčā, ą║ąŠč鹊čĆą░čÅ, ą▓ąĄčĆąŠčÅčéąĮąĄąĄ ą▓čüąĄą│ąŠ, ą▒čāą┤ąĄčé ą▓ ąŠą║čéčÅą▒čĆąĄ ą▓ ąĪąĖą│čāą╗ą┤ąĄ, ąĖ... čéą░ą╝ ą▓čüąĄą│ąŠ ąŠą┤ąĖąĮ ą┐ąĄčĆąĄą║čĆčæčüč鹊ą║. ą¤ąŠčŹč鹊ą╝čā ą┐ąŠą┤čāą╝ą░ą╗, čćč鹊 čü čĆą░ąĘą┤ąĄą╗ąĄąĮąĖąĄą╝ ąĮą░ 4 ą┐ąŠą┤-čāčćą░čüčéą║ą░ ą▒čāą┤ąĄčé ą╝ą░ą╗ąŠą▓ą░č鹊, ą┐ąŠčŹč鹊ą╝čā čĆąĄčłąĖą╗: ą│čāą╗čÅčéčī čéą░ą║ ą│čāą╗čÅčéčī. ąĪą┤ąĄą╗ą░ą╗ čĆą░ąĘą▒ąĖąĄąĮąĖąĄ ąĮą░ 8 ą┐ąŠą┤-čāčćą░čüčéą║ąŠą▓. ąĪą┤ąĄą╗ą░ą╗ ą▓ ąŠą┤ąĮąŠą╝ ą╝ąĄąĮčÄ ą▓ą▓ąŠą┤ "ą║ąŠąĮčéčĆąŠą╗čīąĮčŗčģ č鹊č湥ą║", ą░ ą▓ ą┤čĆčāą│ąŠą╝ ą┐ąŠą┤ą╝ąĄąĮčÄ ą▓čŗą▒ąŠčĆ čéąĖą┐ą░ čüą║ąŠčĆąŠčüčéąĖ, ąĮą░ ą║ąŠč鹊čĆąŠą╣ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čāčćą░čüč鹊ą║ ą┐čĆąŠčģąŠą┤ąĖčéčī. ą¤čĆą░ą▓ą┤ą░, ą┐čĆąĖą▓čÅąĘą║ą░ ą║ "ą┐ąĄčĆąĄčüąĄč湥ąĮąĖčÅą╝" ą▓ąĄą┤čæčé ą║ čüčéą░čĆąŠą╣ ą┐čĆąŠą▒ą╗ąĄą╝ąĄ. ąĢčüą╗ąĖ ą┐čĆąĖ čĆą░ąĘą│ąŠąĮąĄ čĆąŠą▒ąŠčé ąĘą░ą┤ąĖčĆą░ąĄčé ąĮąŠčü - ą┤ą░čéčćąĖą║ąĖ ą▓ąĖą┤čÅčé č鹥ą╝ąĮąŠčéčā. ąó.ąĄ. čŹč鹊čé ą╝ąŠą╝ąĄąĮčé čĆąŠą▒ąŠčé ą▓ąŠčüą┐čĆąĖąĮąĖą╝ą░ąĄčé ą║ą░ą║ ą┐čĆąŠąĄąĘą┤ ą┐ąĄčĆąĄčüąĄč湥ąĮąĖčÅ ąĖ č鹊ą│ą┤ą░ ą▓čüąĄ ą╝ąŠąĖ ąĘą░č鹥ąĖ čüą╝ąĄčēą░čÄčéčüčÅ. ą£ąŠąČąĄčé, ą┤ą╗čÅ čŹč鹊ą│ąŠ ąĖ čüą┤ąĄą╗ą░ą╗ 10 čāčćą░čüčéą║ąŠą▓ (čģąŠčéčÅ 4 ą┐ąĄčĆąĄčüąĄč湥ąĮąĖčÅ ą┤ą░čÄčé č鹊ą╗čīą║ąŠ 9 čāčćą░čüčéą║ąŠą▓), čćč鹊ą▒čŗ ąĖą╝ąĄčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąŠą▒čĆą░ą▒ąŠčéą░čéčī ąŠą┤ąĮąŠ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠąĄ ą╗ąŠąČąĮąŠąĄ "ą┐ąĄčĆąĄčüąĄč湥ąĮąĖąĄ". ąźąŠčéčÅ, čüąĄą╣čćą░čü ąĮą░čĆąĖčüąŠą▓ą░ą╗ ą╝ąŠą┤ąĄą╗čī "čģą▓ąŠčüčéą░" ą┤ą╗čÅ čĆąŠą▒ąŠčéą░, čćč鹊ą▒čŗ ą┐čĆąĖ čĆą░ąĘą│ąŠąĮąĄ ąŠąĮ ąĮą░ ąĮąĄą│ąŠ ąŠą┐ąĖčĆą░ą╗čüčÅ ąĖ ąĮąĄ ą┤ą░ą▓ą░ą╗ ąĘą░ą┤ąĖčĆą░čéčī ąĮąŠčü. ąØčā ą▓ąŠčé, ą┐čĆąĖąĄčģą░ą╗ čÅ čü čāčéčĆą░ ą┐ąŠčĆą░ąĮčīčłąĄ ąĮą░ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅ. ąĪą╝ąŠčéčĆčÄ, ą┐čāčüč鹊. ą¤čĆą░ą▓ą┤ą░ čāąČąĄ čüč鹊čÅčé čüč鹊ą╗čŗ čü čĆąĖąĮą│ą░ą╝ąĖ ą┤ą╗čÅ ą╝ąĖąĮąĖ-čüčāą╝ąŠ ąĖ ą┤ą▓ąĄ ąŠč湥ąĮčī ą┐čŗą╗čīąĮčŗąĄ čéčĆą░čüčüčŗ ą┤ą╗čÅ LineFollower. ąöą╗čÅ ąĮą░čćą░ą╗ą░ ą▓ąĘčÅą╗ ą╝ąĄčĆąĮčāčÄ ą╗ąĄąĮčéčā ąĖ ą┐čĆąŠą╝ąĄčĆčÅą╗ ą┐ąŠčćčéąĖ ą▓čüčÄ čéčĆą░čüčüčā. ąÆ čĆąŠą▒ąŠčéą░ čÅ čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ ą▓ą▓ąĄčüčéąĖ ąĮąĄ ą╝ąŠą│, čéą░ą║ ą║ą░ą║ ąĄčēąĄ ąĮąĄ ą▒čŗą╗ąŠ ąĖąĘą▓ąĄčüčéąĮąŠ ą│ą┤ąĄ ą▒čāą┤ąĄčé čüčéą░čĆčé ąĖ ą▓ ą║ą░ą║ąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ ąĮčāąČąĮąŠ ą▒čāą┤ąĄčé čĆąŠą▒ąŠčéą░ą╝ ą▒ąĄąČą░čéčī. ąĀąĄčłąĖą╗, č鹊ą│ą┤ą░ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī ąĘą░ą┐čāčüčéąĖčéčī čüčéą░čĆąŠą│ąŠ čĆąŠą▒ąŠčéą░ (ą▒ąĄąĘ 菹Įą║ąŠą┤ąĄčĆą░). ąÉ ąŠąĮ ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ čéčĆą░čüčüčā ąĮąĄ ą▓ąĖą┤ąĖčé. ąÆąŠ-ą┐ąĄčĆą▓čŗčģ čéčāą┤ą░ čģąŠčéčī ąĖ čüą║ą▓ąŠąĘčī ąŠą▒ą╗ą░ą║ą░, ąĮąŠ čüą▓ąĄčéąĖčé čüąŠą╗ąĮčåąĄ. ąÉ ą▓ąŠ-ą▓č鹊čĆčŗčģ, čüąĮąŠą▓ą░ čüąĄąĮčüąŠčĆčŗ ą╗ąĖąĮąĖčÄ ą▓ąĖą┤čÅčé ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠ ą║ąŠąĮčéčĆą░čüčéąĮąŠ. ąÆąĄčĆąĮąĄąĄ, čéą░ą║: ąĄčüą╗ąĖ čüąĄąĮčüąŠčĆ čüč鹊ąĖčé č鹊čćąĮąŠ ąĮą░ą┤ ą╗ąĖąĮąĖąĄą╣ - ąŠąĮ ąĄčæ ą▓ąĖą┤ąĖčé ą┐čĆąĄą║čĆą░čüąĮąŠ. ąØąŠ, ą┐čĆąŠą▒ą╗ąĄą╝ą░ ą▓ č鹊ą╝, čćč鹊 čłąĖčĆąĖąĮą░ ą╗ąĖąĮąĖąĖ 15ą╝ą╝ ąĖ čłą░ą│ ą╝ąĄąČą┤čā čüąĄąĮčüąŠčĆą░ą╝ąĖ č鹊ąČąĄ 15ą╝ą╝. ą¤ąŠčŹč鹊ą╝čā, ąĄčüą╗ąĖ ą╗ąĖąĮąĖčÅ ąĮą░čģąŠą┤ąĖčéčüčÅ čĆąŠą▓ąĮąŠ ą┐ąŠ čüąĄčĆąĄą┤ąĖąĮąĄ, čüąĄąĮčüąŠčĆ ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĮą░ ą│čĆą░ąĮąĖčåąĄ ą╗ąĖąĮąĖčÅ - ą▒ąĄą╗ąŠąĄ ą┐ąŠą╗ąĄ. ąś ą▓ąŠčé ą▓ čŹč鹊ą╝ ą╝ąĄčüč鹥 ą▒ąĄą╗ąŠąĄ ą▓čüčæ ąČąĄ ą┐čĆąĄąŠą▒ą╗ą░ą┤ą░ąĄčé. ąØąŠ ąĮą░čüčéčĆąŠąĖą╗ ą┐ąŠčĆąŠą│, čéą░ą║ čćč鹊 čĆąŠą▒ąŠčé ą▓čüąĄ ąČąĄ ą╗ąĖąĮąĖčÄ čĆą░ąĘą│ą╗čÅą┤ąĄčéčī ą╝ąŠąČąĄčé, ąĄčüą╗ąĖ čüąŠą╗ąĮčåąĄ ąĮąĄ čüą▓ąĄčéąĖčé ą┐čĆčÅą╝ąŠ. ąĪąĄąĮčüąŠčĆčŗ, ą║ąŠč鹊čĆčŗąĄ čÅ ą┐ąŠčüčéą░ą▓ąĖą╗ ąĮą░ čĆąŠą▒ąŠčéą░ čü PSoC5, ą╗ąĖąĮąĖčÄ ą▓ąĖą┤čÅčé ą│ąŠčĆą░ąĘą┤ąŠ ą╗čāčćčłąĄ. GP2S60 ąŠčé ą©ą░čĆą┐ ą┐čĆąŠčéąĖą▓ ąÜąĖąĮą│ą▒čĆą░ą╣č鹊ą▓čüą║ąĖčģ KTIR0711S. ąÜ ąĮą░čćą░ą╗čā čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖą╣ čüąŠą╗ąĮčåąĄ čāčłą╗ąŠ, čéą░ą║ čćč鹊 ą╝ąĮąĄ ąŠąĮąŠ ą┐čĆąŠą▒ą╗ąĄą╝ ąĮąĄ čüąŠąĘą┤ą░ą▓ą░ą╗ąŠ. ąÆ čŹč鹊ą╝ ą│ąŠą┤čā ą▓ čüą▓čÅąĘąĖ čü 菹┐ąĖą┤ąĄą╝ąĖąŠą╗ąŠą│ąĖč湥čüą║ąŠą╣ ąŠą▒čüčéą░ąĮąŠą▓ą║ąŠą╣, čĆąĄčłąĄąĮąŠ ą│ąŠčüč鹥ą╣ ąĖąĘ čüąŠčüąĄą┤ąĮąĖčģ čüčéčĆą░ąĮ ąĮąĄ ą┐čĆąĖą│ą╗ą░čłą░čéčī, ą┐ąŠčŹč鹊ą╝čā čüąĄą│ąŠą┤ąĮčÅ ą╗ąĖč鹊ą▓čåąĄą▓ ąĮąĄ ą▒čŗą╗ąŠ. ąæčŗą╗ąŠ ą║ą░ą║-č鹊 čéąĖčģąŠ, čüą┐ąŠą║ąŠą╣ąĮąŠ, ą▒ąĄąĘ ąŠčüąŠą▒ąŠą╣ č鹊ą╗ą┐čŗ. ą¤čĆą░ą▓ą┤ą░, čéčĆą░čüčüą░ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░ ą▓čüąĄą│ąŠ ąŠą┤ąĖąĮ čćą░čü. ąØąŠ čĆąŠą▒ąŠč鹊ą▓ (ą▓ ą║ą░č鹥ą│ąŠčĆąĖąĖ "菹╗ąĄą║čéčĆąŠąĮąĖą║ą░"), č鹊ąČąĄ ą▒čŗą╗ąŠ ą▓čüąĄą│ąŠ 5 čłčéčāą║ ą▓ ą║ą░č鹥ą│ąŠčĆąĖąĖ čüčéčāą┤ąĄąĮčéčŗ/ą╗čÄą▒ąĖč鹥ą╗ąĖ ąĖ 3 čā čłą║ąŠą╗čīąĮąĖą║ąŠą▓. ąÆ ą║ą░č鹥ą│ąŠčĆąĖąĖ "ąøąĄą│ąŠ" - 6. ąźąŠčéčÅ, ąŠą┐čÅčéčī, ąŠč湥ąĮčī ą╝ąĮąŠą│ąŠ čłą║ąŠą╗ ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ą╗ąĖ čāčćą░čüčéąĖąĄ čüąĄą│ąŠą┤ąĮčÅ. ą» čüąŠ čüą▓ąŠąĖą╝ąĖ čĆąŠą▒ąŠčéą░ą╝ąĖ čüą┤ąĄą╗ą░ą╗ ą┐ąŠ 3 ąĘą░ąĄąĘą┤ą░, ą░ ą┐ąŠč鹊ą╝, ą┐ąŠčüą╝ąŠčéčĆąĄą╗ čĆąĄąĘčāą╗čīčéą░čéčŗ. ą×ą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 čā ą╝ąŠąĄą│ąŠ čĆąŠą▒ąŠčéą░ ą┐ąŠą║ą░ čüą░ą╝čŗą╣ ą╗čāčćčłąĖą╣ čĆąĄąĘčāą╗čīčéą░čé. ą¤ąŠčŹč鹊ą╝čā čÅ čĆąĄčłąĖą╗ ąĄą│ąŠ ą▒ąŠą╗čīčłąĄ ąĮą░ čéčĆą░čüčüčā ąĮąĄ ą▓čŗą┐čāčüą║ą░čéčī, ą░ ąĮą░ą┐čĆčÅą│ą░čéčīčüčÅ, č鹊ą╗čīą║ąŠ, ąĄčüą╗ąĖ ą║č鹊-ąĮąĖą▒čāą┤čī ą┐ąĄčĆąĄą┐ą╗čÄąĮąĄčé ą╝ąŠčæ ą▓čĆąĄą╝čÅ. ąś, ąĖčĆąŠąĮąĖčÅ čüčāą┤čīą▒čŗ, čüą░ą╝čŗą╝ ą▒čŗčüčéčĆčŗą╝ ąŠą║ą░ąĘą░ą╗čüčÅ ąĮąĄ č鹊čé čĆąŠą▒ąŠčé čü ą║ąŠč鹊čĆčŗą╝ čÅ čéčāčé ą▓ąŠąĘąĖą╗čüčÅ ą┐ąŠčćčéąĖ ą┤ą▓ąĄ ąĮąĄą┤ąĄą╗ąĖ, ą░ čüčéą░čĆčŗą╣ čĆąŠą▒ąŠčé, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąŠą▓ą░ą╗čÅą╗čüčÅ ą▓ ą║ąŠčĆąŠą▒ą║ąĄ čü č乥ą▓čĆą░ą╗čīčüą║ąĖčģ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖą╣ ąĖ ą║ąŠč鹊čĆąŠą╝čā čÅ ą┤ą░ąČąĄ ą┐čĆąŠčłąĖą▓ą║čā ąĮąĄ ą╝ąĄąĮčÅą╗ (ąś čā ą║ąŠč鹊čĆąŠą│ąŠ ąĮą░ą▓ąĄčĆąĮčÅą║ą░ ąĄčēąĄ ąĖ ą▒ą░ą│ą░ ą▓ i2c ą┤čĆą░ą╣ą▓ąĄčĆąĄ).  ąśčüčģąŠą┤čÅ ąĖąĘ čĆąĄąĘčāą╗čīčéą░č鹊ą▓, ą┐ąŠčģąŠąČąĄ, čćč鹊 ą┐ąŠą▒ąĄą┤čā ą┐čĆąĖąĮąŠčüčÅčé ąĮąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčéčüą║ąĖąĄ ąĖąĘčŗčüą║ąĖ, ą░ čćąĖčüčéą░čÅ ą╝ąĄčģą░ąĮąĖą║ą░ čĆąŠą▒ąŠčéą░. ą¤ąĄčĆąĄą┤ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅą╝ąĖ čÅ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ą╗ čĆąŠą▒ąŠčéą░ čéą░ą║ ą║ą░ą║ ąĄčüą╗ąĖ ą▒čŗ čéčĆą░čüčüčā ą┐čĆąŠčģąŠą┤ąĖą╗ ą║ą░ą║ ą▓ ą┐čĆąŠčłą╗ąŠą╝ ą│ąŠą┤čā. ą¤ąŠčŹč鹊ą╝čā "ą┐čĆąŠą▒ą╗ąĄą╝ąĮčŗą╣" čāčćą░čüč鹊ą║ čü 3 ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮčŗą╝ąĖ ą┐ąŠą▓ąŠčĆąŠčéą░ą╝ąĖ ą▒čŗą╗ ą┐ąŠčüą╗ąĄ ą▓č鹊čĆąŠą│ąŠ ą┐ąĄčĆąĄčüąĄč湥ąĮąĖčÅ ąĖ ą┤ą╗čÅ čŹč鹊ą│ąŠ čāčćą░čüčéą║ą░ čÅ ąĘą░ą┤ą░ą╗ ą┐ąŠąĮąĖąČąĄąĮąĮčāčÄ čüą║ąŠčĆąŠčüčéčī. ąØąŠ ą▓ čŹč鹊ą╝ ą│ąŠą┤čā ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą▓ąĖąČąĄąĮąĖčÅ ąŠčüčéą░ą╗ąŠčüčī č鹊 ąČąĄ čüą░ą╝ąŠąĄ, č鹊ą╗čīą║ąŠ čüčéą░čĆčé ą┐ąĄčĆąĄą╝ąĄčüčéąĖą╗čüčÅ ąĮą░ ą┤čĆčāą│čāčÄ čüč鹊čĆąŠąĮčā, čéą░ą╝ ą│ą┤ąĄ ąĮą░čćą░ą╗ąŠ ą┤ą╗ąĖąĮąĮąŠą│ąŠ ą┐čĆčÅą╝ąŠą│ąŠ čāčćą░čüčéą║ą░ (čéą░ą║ čćč鹊 čŹč鹊čé čāčćą░čüč鹊ą║ ąŠą║ą░ąĘą░ą╗čüčÅ ą┐ąŠčüą╗ąĄ ą┐ąĄčĆą▓ąŠą│ąŠ ą┐ąĄčĆąĄčüąĄč湥ąĮąĖčÅ). ąØąŠ č鹥ą╝ ąĮąĄ ą╝ąĄąĮąĄąĄ, ąĮąĄčüą╝ąŠčéčĆčÅ ąĮą░ č鹊 čćč鹊 čÅ ąĘą░ą▒čŗą╗ čüą┤ąĄą╗ą░čéčī ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, čĆąŠą▒ąŠčé ą╗ąĄą│ą║ąŠ ą┐čĆąŠčłąĄą╗ ą▓čüčÄ čéčĆą░čüčüčā. ą£ąĄąĮčÅ, ą║ąŠąĮąĄčćąĮąŠ čāą┤ąĖą▓ąĖą╗ąŠ, ą┐čĆąŠč湥ą╝čā čĆąŠą▒ąŠčé č鹊čĆą╝ąŠąĘąĮčāą╗ ąĮąĄ ą▓ č鹊ą╝ ą╝ąĄčüč鹥, ą│ą┤ąĄ čüą╗ąĄą┤čāąĄčé. ą¤ąŠčŹč鹊ą╝čā čÅ ąĖčüą┐čĆą░ą▓ąĖą╗ ą╝ą░čüą║čā čāčćą░čüčéą║ąŠą▓, čćč鹊ą▒čŗ ąŠąĮ ą┐čĆąŠčłąĄą╗ čéą░ą║ ą║ą░ą║ ąĘą░ą┤čāą╝čŗą▓ą░ą╗ąŠčüčī. ąĀąĄąĘčāą╗čīčéą░čé ą▒čŗą╗ ąĮąĄą╝ąĮąŠą│ąŠ čģčāąČąĄ. ąÉ ą┐ąŠč鹊ą╝ čÅ ą┐ąŠą┤čāą╝ą░ą╗, ą░ ą▓ąĄą┤čī čĆąŠą▒ąŠčé ą┐čĆąŠčłąĄą╗ čŹč鹊 ąĘą░ą║ąŠą▓čŗčĆąĖčüč鹊ąĄ ą╝ąĄčüč鹊 ąĮą░ ą┐ąŠą╗ąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ! ąś čéčĆąĄčéąĖą╣ ąĘą░ąĄąĘą┤ čüą┤ąĄą╗ą░ą╗ čāąČąĄ ą▒ąĄąĘ "čüąĄą║čĆąĄčéąĮąŠą│ąŠ ąŠčĆčāąČąĖčÅ", ą▓čüčæ ąĮą░ ąŠą┤ąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ąĖ ą┐ąŠą╗čāčćąĖą╗ ą╗čāčćčłąĖą╣ čĆąĄąĘčāą╗čīčéą░čé 10.572čü (čüąŠą▒čüčéą▓ąĄąĮąĮąŠ, čāąČąĄ ą┐ąĄčĆą▓čŗą╣ ąĘą░ąĄąĘą┤ čüą░ą╝ ą┐ąŠ čüąĄą▒ąĄ, ą┤ą░ą╗ ą▒čŗ ą┐ąĄčĆą▓ąŠąĄ ą╝ąĄčüč鹊 - 10.702čü). ąÉ čĆąŠą▒ąŠčé ąĮą░ PSoC5 čü ą║ą░ąČą┤čŗą╝ ąĘą░ąĄąĘą┤ąŠą╝ ą▓čüčæ čāą╗čāčćčłą░ą╗ čĆąĄąĘčāą╗čīčéą░čé. ąØą░čćą░ą╗ čü 15 čüąĄą║čāąĮą┤. ąØą░ ą▓č鹊čĆąŠą╝ ąĘą░ąĄąĘą┤ąĄ čĆąŠą▒ąŠčé "čüąŠčĆą▓ą░ą╗čüčÅ" - ą┐ąŠč鹥čĆčÅą╗ ą╗ąĖąĮąĖčÄ. ą» ą│ąŠą▓ąŠčĆąĖą╗, čćč鹊 čéčĆą░čüčüą░ ą▒čŗą╗ą░ ą│čĆčÅąĘąĮą░čÅ? ąÜąŠąĮąĄčćąĮąŠ, ą┐ąĄčĆąĄą┤ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅą╝ąĖ ąĄčæ ą┐ąŠą╝čŗą╗ąĖ, ąĮąŠ ą▓čüčæ čĆą░ą▓ąĮąŠ ą┐ąŠčüą╗ąĄ ąĘą░ąĄąĘą┤ą░ ą║ąŠą╗čæčüą░ čā čĆąŠą▒ąŠčéą░ ą▒čŗą╗ąĖ ą▓ ą┐čŗą╗ąĖ. ąÉ čā ą╝ąĄąĮčÅ ą┤ąŠą╝ą░ ą║ą░ą║ ąĮą░ąĘą╗ąŠ, ą║ąŠą│ą┤ą░ čüąŠą▒ąĖčĆą░ą╗čüčÅ ąĮą░ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅ, ąĮąĄ ąĮą░čłą╗ąŠčüčī ą╝ą░ą╗čÅčĆąĮąŠą│ąŠ čüą║ąŠčéčćą░. ą×ą▒čŗčćąĮąŠ ą┐ąŠ ą║ą╗ąĄą╣ą║ąŠą╣ čüč鹊čĆąŠąĮąĄ ą║ąŠą╗ąĄčüąŠą╝ ą┐čĆąŠąĄą┤ąĄčłčī ąĖ ą▓čüčÅ ą┐čŗą╗čī čü ą║ąŠą╗ąĄčüą░ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ąĮą░ čüą║ąŠčéčć. ą¤ąŠčŹč鹊ą╝čā, čĆąĄčłąĖą╗, čćč鹊 ąĮą░ą┤ąŠ ą┐ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą│ąŠ ąĘą░ąĄąĘą┤ą░ čüąĮąĖą╝ą░čéčī čü čĆąŠą▒ąŠč鹊ą▓ ą║ąŠą╗čæčüą░ ąĖ ąĮąĄčüčéąĖ ą║ čāą╝čŗą▓ą░ą╗čīąĮąĖą║čā ąĖ ą╝čŗčéčī ą║ąŠą╗čæčüą░. ąóą░ą║ čćč鹊 ą▓čĆąĄą╝čÅ čüčéą░ą╗ąŠ čāą╗čāčćčłą░čéčīčüčÅ ąĖ ą┐čÅčéčŗą╣ ąĘą░ąĄąĘą┤ ą▓čŗčéčÅąĮčāą╗ čŹč鹊ą│ąŠ čĆąŠą▒ąŠčéą░ čü ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą╝ąĄčüčéą░ ąĮą░ ą┐čĆąĄą┤ą┐ąŠčüą╗ąĄą┤ąĮąĄąĄ (č湥čéą▓čæčĆč鹊ąĄ) ą╝ąĄčüč鹊. ąØčā ąĖ ąĮąĄą╝ąĮąŠą│ąŠ č乊č鹊ą│čĆą░čäąĖą╣ ąøąĄą│ąŠ-čüčāą╝ąŠ, ą╝ąĖąĮąĖ-čüčāą╝ąŠ ąĖ iRobot-čüčāą╝ąŠ:    čéčĆą░čüčüą░ ą┤ą╗čÅ folkrace:  ąÆąĖą┤ąĄąŠ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮąŠą│ąŠ ąĘą░ąĄąĘą┤ą░. ąĀąĄą║ąŠą╝ąĄąĮą┤čāčÄ ą▓čŗą║ą╗čÄčćąĖčéčī ąĘą▓čāą║ (čÅ ąĮąĄ ąĘąĮą░čÄ ą║ą░ą║ čāą┤ą░ą╗ąĖčéčī ąĘą▓čāą║ ąĖąĘ ą▓ąĖą┤ąĄąŠ) ąĖ ąĖąĘą▓ąĖąĮąĖč鹥, čćč鹊 čĆčāą║ąĖ čéčĆčÅčüčāčéčüčÅ - čéčĆčāą┤ąĮąŠ ą▓čüčæ ą┤ąĄą╗ą░čéčī ąŠą┤ąĮąŠą╝čā. ąĪą┐ąŠą╣ą╗ąĄčĆ
_________________
ąÉ ą╗čÄą┤ąĖ ą┐ąŠčüą╝ąŠčéčĆčÅčé ąĖ čüą║ą░ąČčāčé: "ąĪąŠą▒ą░ą║ąĖ ą╗ąĄčéčÅčé. ąÆąŠčé ąĖ ąŠčüąĄąĮčī."
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ąĀąĄą║ą╗ą░ą╝ą░
|
|
|
|
|
|
|
|
|
|
uldemir
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤ąĮ čüąĄąĮ 07, 2020 13:41:39 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214
ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
ąöą░, čüą┐ą░čüąĖą▒ąŠ ąĘą░ ą┐ąŠąĘą┤čĆą░ą▓ą╗ąĄąĮąĖąĄ, čģąŠčéčÅ čéčāčé ąŠą┐čÅčéčī ą┐čĆąŠčüč鹊 "ą┐ąŠą▓ąĄąĘą╗ąŠ", čćč鹊 ąĮąĄ ą▒čŗą╗ąŠ ą║ąŠą╝ą░ąĮą┤ ąĖąĘ ąøąĖčéą▓čŗ. ąŻą▓čŗ, ąĮą░ ą▓ąĖą┤ąĄąŠ, ą║ą░ą║ čĆą░ąĘ ą┐ąŠą▒ąĄą┤ąĖč鹥ą╗čī. ąĀąŠą▒ąŠčéą░ ąĮą░ PSoC čÅ čüąĮąĖą╝ą░ą╗, ąĮąŠ ą┤ąŠą╝ą░ ą┐čĆąŠčüą╝ąŠčéčĆąĄą▓, ąĖąĘ-ąĘą░ ą┐ą╗ąŠčģąŠą│ąŠ ą║ą░č湥čüčéą▓ą░ čüčŖčæą╝ą║ąĖ, ą▓ąĖą┤ąĄąŠ čĆąĄčłąĖą╗ ąĮąĄ ą▓čŗą║ą╗ą░ą┤čŗą▓ą░čéčī. ąÆąŠčé č乊č鹊 ąŠą▒ąŠąĖčģ, čćč鹊ą▒čŗ čüčĆą░ą▓ąĮąĖčéčī ąĖčģ čĆą░ąĘą╝ąĄčĆčŗ:  ąæą╗ąĖąČąĮąĖą╣: ąĮą░ stm32f051, ą░ č鹊čé čćč鹊 ą┐ąŠą┤ą░ą╗čīčłąĄ - ąĮą░ PSoC5. ąÆąŠčé ąĄą│ąŠ ą▓ąĖą┤ čüą▓ąĄčĆčģčā ąĖ čüąĮąĖąĘčā.   ą» ą┐čŗčéą░ą╗čüčÅ čāą╗ąŠąČąĖčéčīčüčÅ ą▓ 100čģ100ą╝ą╝, čćč鹊ą▒čŗ ąĘą░ą║ą░ąĘą░čéčī ą┐ąĄčćą░čéąĮčāčÄ ą┐ą╗ą░čéčā ą┐ąŠ ą┤ąĄčłąĄą▓ą╗ąĄ. ą¤ąŠčŹč鹊ą╝čā čā ąĮąĄą│ąŠ "ą┐čĆąŠą┐ąŠčĆčåąĖąĖ" ąĮąĄ čüąŠą▓čüąĄą╝ ą▓ąĄčĆąĮčŗąĄ. ąÆąŠčé ąĖąĘ-ąĘą░ ą║ąŠčĆąŠčéą║ąŠą│ąŠ ą▓čŗąĮąŠčüą░ čüąĄąĮčüąŠčĆąŠą▓ čā ąĮąĄą│ąŠ ąĄčüčéčī č鹥ąĮą┤ąĄąĮčåąĖčÅ ą┐čĆąĖ čĆą░ąĘą│ąŠąĮąĄ ąĘą░ą┤ąĖčĆą░čéčī ąĮąŠčü ąĖ ą┤ą╗čÅ čŹč鹊ą│ąŠ čüąĘą░ą┤ąĖ č鹊čĆčćąĖčé "čģą▓ąŠčüčé" ąĮąĄ ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĖą╣ ąĄą╝čā č鹥ą┐ąĄčĆčī ąĄą│ąŠ ąĘą░ą┤čĆą░čéčī. ąØąŠ ąĖąĘ-ąĘą░ čŹč鹊ą│ąŠ čģą▓ąŠčüčéą░ ą▓ąŠąĘą╝ąŠąČąĮąŠ ą▒ąŠą╗čīčłąĄąĄ ą┐čĆąŠčüą║ą░ą╗čīąĘčŗą▓ą░ąĮąĖąĄ ą┐čĆąĖ čĆą░ąĘą│ąŠąĮąĄ. ą×čüąĮąŠą▓ąĮąŠą╣ ą▓ąĄčü čĆąŠą▒ąŠčéą░ čüąŠčüčéą░ą▓ą╗čÅąĄčé ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ. ą£ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą▒čŗ ąĖą╝ "ą║ąŠą╝ą┐ąĄąĮčüąĖčĆąŠą▓ą░čéčī" ąĘą░ą┤ąĖčĆą░ąĮąĖąĄ ąĮąŠčüą░ ą▓ą▓ąĄčĆčģ, ąĮąŠ ąĄčüą╗ąĖ ąĄą│ąŠ čüą╗ąĖčłą║ąŠą╝ ą▓čŗąĮąĄčüčéąĖ ą▓ą┐ąĄčĆąĄą┤, čŹč鹊 čüąŠąĘą┤ą░čüčé čéčĆčāą┤ąĮąŠčüčéąĖ ą┐čĆąĖ ą┐ąŠą▓ąŠčĆąŠč鹥. ąØą░ą▒ą╗čÄą┤ą░čÅ ąĘą░ ą┐čĆąŠčģąŠąČą┤ąĄąĮąĖąĄą╝ čĆąŠą▒ąŠčéą░ ą┐ąŠ čéčĆą░čüčüąĄ, ąĘą░ą╝ąĄčéąĖą╗ čćč鹊 ą┐čĆąĖ ąĘą░ąĮąŠčüąĄ čåąĄąĮčéčĆ ą▓čĆą░čēąĄąĮąĖčÅ čĆąŠą▒ąŠčéą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ąĖą╝ąĄąĮąĮąŠ čéą░ą╝ ą│ą┤ąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ čŹč鹊čé 菹╗ąĄą╝ąĄąĮčé ą┐ąĖčéą░ąĮąĖčÅ.  ąÆąŠčé čéą░ą║ ą▓čŗą│ą╗čÅą┤ąĖčé čüčéą░čĆčŗą╣ čĆąŠą▒ąŠčé čü ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ ą┐čāą╗čīč鹊ą╝ ą┤ą╗čÅ ąĄą│ąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ. ąóąŠ čćč鹊 ą┤ąĄčƹȹ░č鹥ą╗čī ą▒ą░čéą░čĆąĄąĖ ąĮąĄ ą┐čĆąĖą║čĆčāč湥ąĮ - ąĮąĄ ą▒ąĄą┤ą░. ąöąĄčƹȹĖčéčüčÅ ąĮąŠčĆą╝ą░ą╗čīąĮąŠ ąĖ ą▒ą░čéą░čĆąĄą╣ą║ą░ ą▓ąŠ ą▓čĆąĄą╝čÅ ąĘą░ąĄąĘą┤ą░ ąĮąĄ č鹥čĆčÅąĄčéčüčÅ. ąæčŗą╗ ąĮą░ čŹčéąĖčģ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅčģ čüą╗čāčćą░ą╣ čā ąŠą┤ąĮąŠą│ąŠ čĆąŠą▒ąŠčéą░ ąĖąĘ ą║ą░č鹥ą│ąŠčĆąĖąĖ čłą║ąŠą╗čīąĮąĖą║ąŠą▓, čćč鹊 ą▓ąŠ ą▓čĆąĄą╝čÅ ąĘą░ąĄąĘą┤ą░ ą▒ą░čéą░čĆąĄčÅ ą▓čŗčüą║ąŠčćąĖą╗ą░ ąĖ ąĖąĘ-ąĘą░ čŹč鹊ą│ąŠ čĆąŠą▒ąŠčéą░ ąĘą░ąĮąĄčüą╗ąŠ ąĖ ąŠąĮ ą┐ąŠč鹥čĆčÅą╗ ą╗ąĖąĮąĖčÄ. ąÉ ą┐ąŠč鹊ą╝, ą║ąŠą│ą┤ą░ čÅ čüą╝ąŠčéčĆąĄą╗ ą║ą░ą║ ąĄą│ąŠ "čĆąĄą╝ąŠąĮčéąĖčĆąŠą▓ą░ą╗ąĖ", ą▓čŗčÅčüąĮąĖą╗, čćč鹊 ą▒ą░čéą░čĆąĄčÅ ą▒čŗą╗ą░ ą┐čĆąŠčüč鹊 ą┐čĆąĖą╗ąĄą┐ą╗ąĄąĮą░ ąĮą░ čüą║ąŠčéčć. ą¤čĆąŠčüč鹊 ą┐čĆąĖą╗ąĄą┐ą╗ąĄąĮą░, ą░ ąĮąĄ "ą┐čĆąĖą╝ąŠčéą░ąĮą░ čüą║ąŠčéč湥ą╝". ąĀą░ą╝ą░ čüąŠąĄą┤ąĖąĮčÅčÄčēą░čÅ ąŠčüąĮąŠą▓ąĮčāčÄ ą┐ą╗ą░čéčā čü ą┐ą╗ą░č鹊ą╣ čüąĄąĮčüąŠčĆąŠą▓ čā ą╝ąĄąĮčÅ ąĄčüčéčī ą┤ą▓čāčģ ą▓ąĖą┤ąŠą▓. ąŁčéą░ ą┤ą╗ąĖąĮąĮą░čÅ, ą░ ąĄčüčéčī ą┐ąŠą║ąŠčĆąŠč湥. ąĪąŠą▒čüčéą▓ąĄąĮąĮąŠ ąŠąĮąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé ą┤ą▓čāą╝ FPC čłą╗ąĄą╣čäą░ą╝. ąÜąŠčĆąŠčéą║ąĖą╣ čłą╗ąĄą╣čä, ą▓ąŠąĘą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé ąĮčāąČąĄąĮ ąĮą░ čéčĆą░čüčüąĄ čü ą╝ąĄą╗ą║ąĖą╝ąĖ ą┐ąŠą▓ąŠčĆąŠčéą░ą╝ąĖ ą║ą░ą║ ąĮą░ čéčĆą░čüčüąĄ ą▓ TSI:  ąĪ ą┤ą╗ąĖąĮąĮčŗą╝ "ąĮąŠčüąŠą╝" ą┐čĆąŠą╣čéąĖ "čāą╗ąĖčéą║čā" (ąĖą╗ąĖ ąĖąĮčī-čÅąĮčī, ąĮą░ąĘčŗą▓ą░ą╣č鹥 ą║ą░ą║ čģąŠčéąĖč鹥) ą┤ąŠą▓ąŠą╗čīąĮąŠ ą┐čĆąŠą▒ą╗ąĄą╝ą░čéąĖčćąĮąŠ. ąÆ ą┐čĆąĄą┤čŗą┤čāčēąĖąĄ čĆą░ąĘčŗ čÅ ąĘą░ą╝ąĄčéąĖą╗ čā ą╝ąĮąŠą│ąĖčģ ą▓ č鹊ą╝ ą╝ąĄčüč鹥 ą▒čŗą╗ąĖ ą┐čĆąŠą▒ą╗ąĄą╝čŗ ąĖ čĆąŠą▒ąŠčéčŗ ą▓čŗą╗ąĄčéą░ą╗ąĖ čü čéčĆą░čüčüčŗ. ąØąĄą╝ąĮąŠą│ąŠ ą┐ąŠą▒ąŠą╗čéą░ą╗ čü ą║ąŠąĮą║čāčĆąĄąĮč鹊ą╝. ąĢą│ąŠ ąĘą░ąĖąĮč鹥čĆąĄčüąŠą▓ą░ą╗ąĖ ą║ąŠą╗čæčüąĖą║ąĖ ąĮą░ ą╝ąŠčæą╝ čĆąŠą▒ąŠč鹥:  ąÆąŠčé ą┐ąŠą┐čŗčéą░ą╗čüčÅ čüč乊č鹊ą│čĆą░čäąĖčĆąŠą▓ą░čéčī. ąĪčĆą░ą▓ąĮąĖą╗ąĖ ą║ąŠą╗čæčüą░. ąŻ ą╝ąŠąĄą│ąŠ ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéčī "čĆąĖčäą╗čæąĮą░čÅ", ą░ čā ąĮąĄą│ąŠ ą│ą╗ą░ą┤ą║ą░čÅ. ą×ąĮ ą┐ąĄčĆąĄą┤ ąĘą░ą╗ąĖą▓ą║ąŠą╣, čā č乊čĆą╝čŗ čłą╗ąĖčäčāąĄčé čŹčéčā ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéčī. ą» ąČąĄ čćč鹊 ąĮą░ą┐ąĄčćą░čéą░ą╗ąŠčüčī ą┐čĆąĖąĮč鹥čĆąŠą╝, č鹊 ąĖ ąŠčüčéą░ą▓ąĖą╗. ą¤čĆą░ą▓ą┤ą░, ąŠąĮ ą┐ąŠąČą░ą╗ąŠą▓ą░ą╗čüčÅ, čćč鹊 ąĖąĘ-ąĘą░ čŹč鹊ą│ąŠ ąĄą│ąŠ ą║ąŠą╗čæčüą░ čüą╗ąĄą│ą║ą░ "ą╗ąĖą┐ą║ąĖąĄ", čćč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī čćčĆąĄą▓ą░č鹊 ąĮąĄ ą┐čĆąŠčģąŠąČą┤ąĄąĮąĖąĄą╝ č鹥čģąĖąĮčüą┐ąĄą║čåąĖąĖ. ą¤ąŠč鹊ą╝čā ą║ą░ą║ ą▓ ą┐čĆą░ą▓ąĖą╗ą░čģ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖą╣ ąĘą░ą┐čĆąĄčēąĄąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓čüąĄą▓ąŠąĘą╝ąŠąČąĮčāčÄ "ą╗ąĖą┐čāč湥čüčéčī". ąś, ą║ą░ą║ ąŠąĮ čüą║ą░ąĘą░ą╗, ą┐čĆąŠą▓ąĄčĆą║ą░ ą┤ąĄą╗ą░ąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝: ąĀąŠą▒ąŠčé ą║ą╗ą░ą┤ąĄčéčüčÅ ąĮą░ ą╗ąĖčüčé ą▒čāą╝ą░ą│ąĖ ąĖ ą┐ąŠą┤ąĮąĖą╝ą░ąĄčéčüčÅ. ąĢčüą╗ąĖ ą╗ąĖčüčé ą┐ąŠą┤ąĮąĖą╝ą░ąĄčéčüčÅ ą▓ą╝ąĄčüč鹥 čü čĆąŠą▒ąŠč鹊ą╝ - ą┤ąĖčüą║ą▓ą░ą╗ąĖčäąĖą║ą░čåąĖčÅ. ąØąŠ č鹥ą╝ ąĮąĄ ą╝ąĄąĮąĄąĄ, ą║ąŠą╗čæčüą░ ąŠą┤ąĮą░ ąĖąĘ čüą░ą╝čŗčģ ą│ą╗ą░ą▓ąĮčŗčģ čüąŠčüčéą░ą▓ą╗čÅčÄčēąĖčģ čāčüą┐ąĄčģą░. ąöąŠ ą┐čĆąŠčłą╗ąŠą│ąŠ ą│ąŠą┤ą░ čÅ ą┐čŗčéą░ą╗čüčÅ ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓čüąĄą▓ąŠąĘą╝ąŠąČąĮčŗą╝ąĖ ą┐ąŠą║čāą┐ąĮčŗą╝ąĖ ą║ąŠą╗čæčüą░ą╝ąĖ. ąÜ čüąŠąČą░ą╗ąĄąĮąĖčÄ, ą▓čüąĄ ąŠąĮąĖ ąĖą╝ąĄą╗ąĖ ą┤ą░ą╗čæą║ąŠąĄ ąŠčé ąČąĄą╗ą░ąĄą╝ąŠą│ąŠ ą║ą░č湥čüčéą▓ąŠ čüčåąĄą┐ą╗ąĄąĮąĖčÅ čü čéčĆą░čüčüąŠą╣. ąØąŠ, ą┤ą░ąČąĄ ąŠčéą╗ąĖčéčŗąĄ ąĖąĘ čüąĖą╗ąĖą║ąŠąĮą░, ąĄčüą╗ąĖ ąŠąĮąĖ "ą│čĆčÅąĘąĮčŗąĄ" č鹊ąČąĄ ąĖą╝ąĄčÄčé ą┐ą╗ąŠčģąŠąĄ čüčåąĄą┐ą╗ąĄąĮąĖąĄ. ą¤ąĄčĆąĄą┤ ą┐ąĄčĆą▓čŗą╝ ąĘą░ąĄąĘą┤ąŠą╝ čÅ čĆąŠą▒ąŠčéą░ą╝ ą┐ąŠą╝čŗą╗ ą║ąŠą╗čæčüą░, ąĮąŠ ą┐ąĄčĆąĄą┤ ą▓č鹊čĆčŗą╝ čÅ ąĖčģ ąĮąĄ ą╝čŗą╗. ąś čüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ ąĖą╗ąĖ ąĮąĄčé, ąŠą▒ą░ čĆąŠą▒ąŠčéą░ ąĮą░ ą▓č鹊čĆąŠą╝ ąĘą░ąĄąĘą┤ąĄ ą┤ą░ą╗ąĖ ą┐ą╗ąŠčģąĖąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ: čüčéą░čĆčŗą╣ čĆąŠą▒ąŠčé ą▒čŗą╗ ą╝ąĄą┤ą╗ąĄąĮąĮąĄąĄ ąĮą░ čåąĄą╗čāčÄ čüąĄą║čāąĮą┤čā, ą░ čĆąŠą▒ąŠčé ąĮą░ PSoC ąĮą░ ą┐ąŠą▓ąŠčĆąŠčéą░čģ čéą░ą║ ąĘą░ąĮąŠčüąĖą╗ąŠ, čćč鹊 čüą▒ąĖą╗čüčÅ čü čéčĆą░čüčüčŗ ąĖ čäąĖąĮąĖčłą░ ąĮąĄ ą┤ąŠčüčéąĖą│ ą▓ąŠąŠą▒čēąĄ. ąÉ čÅ č鹊 čāą┤ąĖą▓ą╗čÅą╗čüčÅ, ą┐ąŠč湥ą╝čā ą╗ąĖč鹊ą▓čüą║ąĖąĄ ąĖ ą▒ąĄą╗ąŠčĆčāčüčüą║ąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ čéą░ą║ ąĮąŠčüčÅčéčüčÅ čüąŠ ą▓čüčÅą║ąĖą╝ąĖ ąČąĖą┤ą║ąŠčüčéčÅą╝ąĖ ąĖ ą┐ąŠčüč鹊čÅąĮąĮąŠ čéčĆčāčé ą║ąŠą╗čæčüą░ čĆąŠą▒ąŠčéą░ą╝! ąØąĄą╝ąĮąŠą│ąŠ čéą░ą║ ąČąĄ ą┐ąŠą│ąŠą▓ąŠčĆąĖą╗ąĖ ąŠ čüąĄąĮčüąŠčĆą░čģ ą╗ąĖąĮąĖąĖ. ą£ąŠą╣ ą║ąŠąĮą║čāčĆąĄąĮčé čüą┤ąĄą╗ą░ą╗ ąĮą░ čüąĄąĮčüąŠčĆčŗ "čłąĖčĆą╝čā", čéą░ą║ čćč鹊ą▒čŗ ą▓ čéčā ąĘąŠąĮčā ąĮąĄ ą┐ąŠą┐ą░ą┤ą░ą╗ ą▓ąĮąĄčłąĮąĖą╣ čüą▓ąĄčé ą▓ąŠąŠą▒čēąĄ. ą» ąČąĄ ą┐ąŠą╗ąŠąČąĖą╗čüčÅ ąĮą░ "ą░ą▓ąŠčüčī". ąÉą▓ąŠčüčī, ąŠčĆą│ą░ąĮąĖąĘą░č鹊čĆčŗ ą┐ąĄčĆąĄą┤ą▓ąĖąĮčāčé čéčĆą░čüčüčā, ąĄčüą╗ąĖ čéčāą┤ą░ ą▒čāą┤ąĄčé ą┐čĆčÅą╝ąŠ čüą▓ąĄčéąĖčéčī čüąŠą╗ąĮčåąĄ. ąóąĄą╝ ąĮąĄ ą╝ąĄąĮąĄąĄ, čā ą╝ąŠąĖčģ čĆąŠą▒ąŠč鹊ą▓ ąŠčüąŠą▒čŗčģ ą┐čĆąŠą▒ą╗ąĄą╝ čü čĆą░čüą┐ąŠąĘąĮąŠą▓ą░ąĮąĖąĄą╝ ą╗ąĖąĮąĖąĖ ąĮąĄ ą▒čŗą╗ąŠ, ą░ čā ą║ąŠąĮą║čāčĆąĄąĮčéą░ ą▓ ąŠą┤ąĮąŠą╝ ą╝ąĄčüč鹥 ą▓čĆąŠą┤ąĄ ą║ą░ą║ ą▒čŗą╗ą░ ą┐ąŠčüč鹊čÅąĮąĮąŠ ą┐čĆąŠą▒ą╗ąĄą╝ą░, čćč鹊 ą┐čĆąĖčłą╗ąŠčüčī ą┐ąŠčüčéą░ą▓ąĖčéčī čüčāą╝ą║čā čĆčÅą┤ąŠą╝ čü čéčĆą░čüčüąŠą╣, čćč鹊ą▒čŗ ąŠąĮą░ čüą╗ąĄą│ą║ą░ ąĘą░č鹥ąĮčÅą╗ą░ č鹊 čāčćą░čüč鹊ą║. ąØčā ąĄčüą╗ąĖ ąĮąĄ čüčćąĖčéą░čéčī, čćč鹊 čüčéą░čĆčŗą╣ čĆąŠą▒ąŠčé ą┐ą╗ąŠčģąŠ ą╗ąĖąĮąĖčÄ ą▓ąĖą┤ąĄą╗, ą║ąŠą│ą┤ą░ ąŠąĮą░ ą┐ąŠ čåąĄąĮčéčĆčā. ąØąŠ čā ą╝ąĄąĮčÅ ą░ą╗ą│ąŠčĆąĖčéą╝ ą▓čŗčüčéčĆąŠąĄąĮ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊 ąĄčüą╗ąĖ ą╗ąĖąĮąĖčÅ ąĮąĄ ą▓ąĖą┤ąĮą░, č鹊 čüąĖčüč鹥ą╝ą░ čüčćąĖčéą░ąĄčé, čćč鹊 ąŠąĮą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą┐ąŠ čåąĄąĮčéčĆčā, ąĄčüą╗ąĖ ą┐čĆąĄą┤čŗą┤čāčēąĖąĄ ą┐ąŠą║ą░ąĘą░ąĮąĖčÅ ąĖą╝ąĄą╗ąĖ ą╝ą░ą╗ąŠąĄ ąŠčéą║ą╗ąŠąĮąĄąĮąĖąĄ ąŠčé čåąĄąĮčéčĆą░. ąÆąŠčé, ąĮą░ą┐čĆąĖą╝ąĄčĆ, čéčĆą░čüčüčŗ ą┤ą╗čÅ MakeBlock čĆąŠą▒ąŠč鹊ą▓ ąĖą╝ąĄčÄčé ą▓ čüą▓ąŠčæą╝ ą░čĆčüąĄąĮą░ą╗ąĄ čāčćą░čüčéą║ąĖ čü ą┐čĆąĄčĆčŗą▓ąĖčüč鹊ą╣ ą╗ąĖąĮąĖąĄą╣ ąĖ čĆąŠą▒ąŠčé ą┤ąŠą╗ąČąĄąĮ ą▓čüčæ-čĆą░ą▓ąĮąŠ ą┐ąŠ ąĮąĄą╣ ą┐čĆąŠą╣čéąĖ ą┐čĆčÅą╝ąŠ. ąś ą║ą░ą║-č鹊 čĆą░ąĘ čÅ čüą▓ąŠąĄą│ąŠ čĆąŠą▒ąŠčéą░ ą┐čĆąŠą▒ąŠą▓ą░ą╗ ą┐ąŠ čéą░ą║ąŠą╣ čéčĆą░čüčüąĄ ą┐čāčüčéąĖčéčī. ąÜąŠąĮąĄčćąĮąŠ ąĖąĘ-ąĘą░ čŹč鹊ą╣ čüą╗ąĄą┐ąŠčéčŗ ąĮą░ ą▓ąĖą┤ąĄąŠ ą╝ąŠąČąĮąŠ ąĘą░ą╝ąĄčéąĖčéčī, čćč鹊 čĆąŠą▒ąŠčé ąĮą░ ą┐čĆčÅą╝ąŠą╝ čāčćą░čüčéą║ąĄ ąĮąĄą╝ąĮąŠą│ąŠ "ą▓ąĖą╗čÅąĄčé". ąØčā čćč鹊 ąČ, č鹥ą┐ąĄčĆčī ąĮą░ą┤ąŠ ą│ąŠč鹊ą▓ąĖčéčīčüčÅ ą║ čüą╗ąĄą┤čāčÄčēąĖą╝ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅą╝ 24 ąŠą║čéčÅą▒čĆčÅ ą▓ ąĪąĖą│čāą╗ą┤ąĄ ąĖ 19 ą┤ąĄą║ą░ą▒čĆčÅ ą▓ TSI. ąóą░ą╝ ą┐ąŠą╝ąĖą╝ąŠ Linefollower ą▒čāą┤ąĄčé ąĄčēąĄ ąĖ ą╗ą░ą▒ąĖčĆąĖąĮčé.
_________________
ąÉ ą╗čÄą┤ąĖ ą┐ąŠčüą╝ąŠčéčĆčÅčé ąĖ čüą║ą░ąČčāčé: "ąĪąŠą▒ą░ą║ąĖ ą╗ąĄčéčÅčé. ąÆąŠčé ąĖ ąŠčüąĄąĮčī."
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
uldemir
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčé čüąĄąĮ 08, 2020 09:33:41 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214
ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
|
ąÜąŠąĮą║čāčĆąĄąĮč鹊ą▓ čÅ ąĮąĄ č乊č鹊ą│čĆą░čäąĖčĆąŠą▓ą░ą╗. ąŁč鹊 čüą╝ą░čģąĖą▓ą░ą╗ąŠ ą▒čŗ ąĮą░ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗą╣ čłą┐ąĖąŠąĮą░ąČ. ąźąŠčéčÅ, ą║ą░ą║ ą╝ąĮąĄ čĆą░čüčüą║ą░ąĘčŗą▓ą░ą╗ąĖ, čćč鹊 ąĮą░ ą▒ąŠą╗čīčłąĖčģ ą╝ąĄąČą┤čāąĮą░čĆąŠą┤ąĮčŗčģ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅčģ čŹč鹊 ą┐čĆąŠčåą▓ąĄčéą░ąĄčé - ą▓čüąĄ čģąŠčéčÅčé čāąĘąĮą░čéčī čćč鹊 čéą░ą╝ čā ą║ąŠąĮą║čāčĆąĄąĮč鹊ą▓, ą▓ąĄą┤čī čéą░ą╝ čāąČąĄ ą║čĆčāčéčÅčéčüčÅ čĆąĄą░ą╗čīąĮčŗąĄ ą┤ąĄąĮčīą│ąĖ. ą¤ąŠčŹč鹊ą╝čā čéą░ą╝ čĆąŠą▒ąŠč鹊ą▓ ą▓čŗčéą░čüą║ąĖą▓ą░čÄčé ąĖąĘ ą║ąŠčĆąŠą▒ą║ąĖ ą┐ąĄčĆąĄą┤ ąĘą░ąĄąĘą┤ąŠą╝ ąĖ čüčĆą░ąĘčā ą┐čĆčÅčćčāčé ąŠą▒čĆą░čéąĮąŠ ąĮą░ čäąĖąĮąĖčłąĄ. ą¤čĆą░ą▓ą┤ą░ ąĮąĖčćč鹊 ąĮąĄ ą╝ąĄčłą░ąĄčé ą┐čĆąŠčüč鹊 čüą╝ąŠčéčĆąĄčéčī, ą║ąŠą│ą┤ą░ čĆąŠą▒ąŠčéčŗ ąĖą┤čāčé ą┐ąŠ čéčĆą░čüčüąĄ. ąØąŠ ą║ąĖąĮąĄą╝ą░čéąĖč湥čüą║ą░čÅ čüčģąĄą╝ą░ čā ą▓čüąĄčģ ą┐ąŠčćčéąĖ ąŠą┤ąĖąĮą░ą║ąŠą▓ą░. ąĀą░ąĘą╗ąĖčćą░čÄčéčüčÅ ąĮčÄą░ąĮčüčŗ. ą¤čĆąĖč湥ą╝ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą║ąŠąĮčüčéčĆčāą║čåąĖąĖ ą▓čŗą│ą╗čÅą┤čÅčé ą┤ąŠą▓ąŠą╗čīąĮąŠ čģą╗ąĖą┐ą║ąŠ ąĖ ą▒čŗą▓ą░ą╗ąĖ čüą╗čāčćą░ąĖ, čćč鹊 ą║ąŠą│ą┤ą░ čĆąŠą▒ąŠčé ą▓čŗą╗ąĄčéą░ąĄčé čü čéčĆą░čüčüčŗ ąĖ čāą┤ą░čĆčÅąĄčéčüčÅ ąŠ čćč鹊-ąĮąĖą▒čāą┤čī - ąŠąĮ ą┐čĆąŠčüč鹊 čĆą░ąĘą▓ą░ą╗ąĖą▓ą░ąĄčéčüčÅ. ąŻ ą╝ąĄąĮčÅ ą┐ą╗ą░čéą░ čÅą▓ą╗čÅąĄčéčüčÅ ąĮąĄčüčāčēąĄą╣ čĆą░ą╝ąŠą╣, ą░ čā ą┤čĆčāą│ąĖčģ ąĖą╗ąĖ ą║čāčüąŠą║ ąŠčĆą│čüč鹥ą║ą╗ą░, ąĖą╗ąĖ ąĮą░ą┐ąĄčćą░čéą░ąĮąĮą░čÅ ąĮą░ 3D ą┐čĆąĖąĮč鹥čĆąĄ. ąŻ ą║ąŠą│ąŠ-č鹊 čüą┤ąĄą╗ą░ąĮą░ ą┐ąĄčćą░čéąĮą░čÅ ą┐ą╗ą░čéą░, ą░ ą║ąŠą│ąŠ-č鹊 ą░čĆą┤čāąĖąĮąŠą▓čüą║ąĖąĄ ą╝ąŠą┤čāą╗ąĖ ą┐čĆąĖą║ą╗ąĄąĄąĮąĮčŗąĄ č鹥čĆą╝ąŠą║ą╗ąĄąĄą╝. ąĪąĄąĮčüąŠčĆčŗ č鹊ąČąĄ, čā ą╝ąĄąĮčÅ čüč鹊čÅčé ąŠąĮąĖ ą┐ąŠą╗čāą║čĆčāą│ąŠą╝, ą░ ą║ąŠą│ąŠ-č鹊 ą▓ ą┐čĆčÅą╝čāčÄ ą╗ąĖąĮąĖčÄ. ą©ą░ą│, ą║čüčéą░čéąĖ, č鹊ąČąĄ čĆą░ąĘą╗ąĖčćą░ąĄčéčüčÅ. ąŻ ą╝ąŠąĄą│ąŠ ą║ąŠąĮą║čāčĆąĄąĮčéą░, ą▓čĆąŠą┤ąĄ č鹊ąČąĄ 8 čüąĄąĮčüąŠčĆąŠą▓, ąĮąŠ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮčŗ čü ą╝ąĄąĮčīčłąĖą╝ čłą░ą│ąŠą╝. ąŚą░ čüč湥čé čŹč鹊ą│ąŠ čā ąĮąĄą│ąŠ čüąĄąĮčüąŠčĆčŗ, ą╝ąŠąČąĄčé, ą╗čāčćčłąĄ ą▓ąĖą┤čÅčé ą╗ąĖąĮąĖčÄ, ąĮąŠ čĆą░ą▒ąŠčćąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ čüąĄąĮčüąŠčĆąŠą▓ ąĘą░ čüč湥čé čŹč鹊ą│ąŠ ą╝ąĄąĮčīčłąĄ. ąŻ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ čłą║ąŠą╗čīąĮąĖą║ąŠą▓ ą╗ąĖąĮąĄą╣ą║ą░ čüąĄąĮčüąŠčĆąŠą▓ ą▒čŗą╗ą░ čłąĖčĆąĄ. ąöčāą╝ą░ą╗, čćč鹊 čéą░ą╝ ą▒ąŠą╗čīčłąĄ čüąĄąĮčüąŠčĆąŠą▓, ąĮąŠ ą┐čĆąĖą│ą╗čÅą┤ąĄą▓čłąĖčüčī, ąĘą░ą╝ąĄčéąĖą╗, čćč鹊 č鹊ąČąĄ 8, č鹊ą╗čīą║ąŠ ąŠąĮąĖ čüč鹊čÅčé čü ą▒ąŠą╗čīčłąĖą╝ čłą░ą│ąŠą╝, čé.ąĄ. ą┐ąŠą║ą░ąĘą░ąĮąĖčÅ čüąĄąĮčüąŠčĆąŠą▓ ąĖąĮąŠą│ą┤ą░ ą┐čĆąŠą┐ą░ą┤ą░čÄčé. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐čĆąĖąĮčÅčéąĖąĄ čĆąĄčłąĄąĮąĖčÅ ą┤ąŠą╗ąČąĮąŠ ąĘą░ą┐ą░ąĘą┤čŗą▓ą░čéčī, ą▓ąĄą┤čī ąĄčüą╗ąĖ č鹊ą╗čīą║ąŠ čćč鹊 ą╗ąĖąĮąĖčÅ ą▒čŗą╗ą░ ą┐ąŠą┤ čéčĆąĄčéčīąĖą╝ čüąĄąĮčüąŠčĆąŠą╝ ąĖ ąĖčüč湥ąĘą╗ą░, č鹊 ąĮąĄą║ąŠč鹊čĆąŠąĄ ą▓čĆąĄą╝čÅ ąĮąĄąĖąĘą▓ąĄčüčéąĮąŠ, ą║čāą┤ą░ ąŠąĮą░ ą┤ąĄą╗ą░čüčī ąĖ ąĮą░ą┤ąŠ ąČą┤ą░čéčī čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖąĄ 2 ąĖą╗ąĖ 4 čüąĄąĮčüąŠčĆą░. ąś ą║ąŠą│ą┤ą░ čÅ ąŠą┤ąĮąĖą╝ ą│ą╗ą░ąĘąŠą╝ ą┐ąŠą│ą╗čÅą┤čŗą▓ą░ą╗ čćč鹊 čéą▓ąŠčĆąĖčéčüčÅ ąĮą░ čéčĆą░čüčüąĄ, č鹊 ąĘą░ą╝ąĄčéąĖą╗, čćč鹊 ąĄą│ąŠ čĆąŠą▒ąŠčé ą┐ąŠčüč鹊čÅąĮąĮąŠ ąĘą░čåąĖą║ą╗ąĖą▓ą░ą╗čüčÅ ą▓ "č鹊ą╣ ą┐ąĄčéą╗ąĄ".
ąŻ ą╝ąĮąŠą│ąĖčģ ą▓ąĖą┤ąĄą╗ č鹊čĆčćą░čēąĖą╣ ąĖą╗ąĖ "ą▒ąŠą╗čéą░čÄčēąĖą╣čüčÅ" ą▒ą╗čÄčéčāčü ą╝ąŠą┤čāą╗čī. ąśą╗ąĖ HC-05/06, ąĖą╗ąĖ HM-15 ąĖ ąĘą░ą┐čāčüą║ ąĖ ąŠčüčéą░ąĮąŠą▓ čĆąŠą▒ąŠčéą░ ą┐čĆąŠą▓ąŠą┤ąĖą╗ąĖ čüąŠ čüą╝ą░čĆčéč乊ąĮą░. ą×ą┤ąĖąĮ ąĖąĘ ąĮą░čłąĄą│ąŠ ą║ą╗čāą▒ą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ą╗, čćč鹊 ąŠąĮ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüą┤ąĄą╗ą░ą╗ čüą▓ąŠčÄ ą░ą┐ą┐ą╗ąĖą║ą░čåąĖčÄ. ąØąŠ, ą║ą░ą║ čÅ ą┐ąŠą│ą╗čÅą┤ąĄą╗, čéą░ą╝ ą▒čŗą╗ąŠ ąŠč湥ąĮčī ą╝ą░ą╗ąŠ ąĮą░čüč鹊ąĄčćąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓. ą×čüčéą░ą╗čīąĮčŗąĄ, ąĮą░ą▓ąĄčĆąĮąŠąĄ, ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą╝ąĄąĮčÅčÄčé ą┐čĆčÅą╝ąŠ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ąĖ ą┐ąĄčĆąĄ ąĘą░ą╗ąĖą▓ą░čÄčé ą┐čĆąŠčłąĖą▓ą║čā ą┐ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ. ąØąĄ ą╝ąŠą│čā čāčéą▓ąĄčƹȹ┤ą░čéčī, čćč鹊 čŹč鹊 ąĖą╝ąĄąĮąĮąŠ ą╝ąŠčæ ą▓ą╗ąĖčÅąĮąĖąĄ, ąĮąŠ ą║ąŠą│ą┤ą░ čÅ ąĮą░čćą░ą╗ čāčćą░čüčéą▓ąŠą▓ą░čéčī ą▓ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅčģ čā ą╝ąŠąĄą│ąŠ čĆąŠą▒ąŠčéą░ čüą▓ąĄčĆčģčā čüč鹊čÅą╗ OLED ą┤ąĖčüą┐ą╗ąĄą╣ (č鹥ą┐ąĄčĆčī čÅ ąĄą│ąŠ čüą┤ąĄą╗ą░ą╗ čüčŖąĄą╝ąĮčŗą╝, čćč鹊ą▒čŗ čāą╝ąĄąĮčīčłąĖčéčī ą▓ąĄčü čĆąŠą▒ąŠčéą░), č湥čĆąĄąĘ ą║ąŠč鹊čĆčŗą╣ čÅ čüą╝ąŠčéčĆąĄą╗ ą│ąĖčüč鹊ą│čĆą░ą╝ą╝čŗ čüąĄąĮčüąŠčĆąŠą▓, ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ą╗ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ ąĘą░ąĄąĘą┤ą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ą╗ ąĮąŠą╝ąĄčĆ čāčćą░čüčéąĮąĖą║ą░, ą░ čā ą┤čĆčāą│ąĖčģ, čüą║ą░ąČąĄą╝ čüčāą╝ąŠ-čĆąŠą▒ąŠč鹊ą▓ ąĖ folkrace čĆąŠą▒ąŠč鹊ą▓ ą▒čŗą╗ąĖ ą┤ąĖą┐-čüą▓ąĖčéčćąĖ ą║ąŠč鹊čĆčŗą╝ąĖ čāčćą░čüčéąĮąĖą║ąĖ ąĘą░ą┤ą░ą▓ą░ą╗ąĖ "čüčéčĆą░č鹥ą│ąĖąĖ" čĆąŠą▒ąŠčéą░ą╝. ą¦ąĄčĆąĄąĘ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą▓čĆąĄą╝čÅ, ąĘą░ą╝ąĄčéąĖą╗, čćč鹊 ąĮą░ čüčāą╝ąŠ-čĆąŠą▒ąŠčéą░čģ čüčéą░ą╗ąĖ ą┐ąŠčÅą▓ą╗čÅčéčīčüčÅ ą╝ą░ą╗ąĄąĮčīą║ąĖąĄ ą┤ąĖčüą┐ą╗ąĄą╣čćąĖą║ąĖ 128čģ32, ą░ ąĮą░ ąŠą┤ąĮąŠą╝ folkrace ą▓ąĖą┤ąĄą╗ ą┤ą░ąČąĄ 1,3" TFT čü čéą░čćčüą║čĆąĖąĮąŠą╝. ąóą░ą║ čćč鹊 ąĖą┤ąĄąĖ ą┐ąĄčĆąĄąĮąĖą╝ą░čÄčéčüčÅ ąĖ čĆą░ąĘą▓ąĖą▓ą░čÄčéčüčÅ.
===
ąĪąŠą▒čüčéą▓ąĄąĮąĮąŠ, ą▓ąĄčĆąĮčāčüčī ą║ RSLK. ąóą░ą║ ą║ą░ą║ čÅ čāąČąĄ čüą┤ąĄą╗ą░ą╗ ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą▒ą░čéą░čĆąĄąĖ ąĖ č鹥ą╝ čüą░ą╝čŗą╝ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ą╗ ąÉą”ą¤, ąĘą░ą┤ą░ą╗čüčÅ ą▓ąŠą┐čĆąŠčüąŠą╝, ą║ą░ą║ čŹč鹊 ąČąĄ ąÉą”ą¤ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą┤ą░ą╗čīąĮąŠą╝ąĄčĆąĮčŗčģ čüąĄąĮčüąŠčĆąŠą▓. ą¤ąĄčĆąĄą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą║ą░ąČą┤čŗą╣ čĆą░ąĘ ą╝ąĮąĄ ą╗ąĄąĮčī, ą┐ąŠčŹč鹊ą╝čā ąĘą░ą┤čāą╝ą░ą╗čüčÅ, ą║ą░ą║ ą▓čüčæ ąŠčåąĖčäčĆąŠą▓čŗą▓ą░čéčī čĆą░ąĘąŠą╝ ąĖ ą▒ą░čéą░čĆąĄą║čā, ąĖ ą┤ą░ą╗čīąĮąŠą╝ąĄčĆčŗ. ą¤ąŠčŹč鹊ą╝čā čÅ ąŠčéą║ą░ąĘą░ą╗čüčÅ ąŠčé čĆą░čüčéčÅąĮčāč鹊ą│ąŠ čü菹╝ą┐ą╗ąĖąĮą│ą░ ąĖ ą┤ąĄą╗ąĖč鹥ą╗čī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą▒ą░čéą░čĆąĄąĖ ąĘą░ą▓čæą╗ ąĮą░ ą┐ąŠą▓č鹊čĆąĖč鹥ą╗čī ąĮą░ ą×ąŻ (ą▒ą╗ą░ą│ąŠ ąĮą░ ą┐ą╗ą░č鹥 ąŠą┤ąĖąĮ ąĄčüčéčī čüą▓ąŠą▒ąŠą┤ąĮčŗą╣) ąĖ ą┐čĆąĖą║čĆčāčéąĖą╗ ąĖ ą┐ąŠą┤čüąŠąĄą┤ąĖąĮąĖą╗ čłą░čĆą┐ąŠą▓čüą║ąĖąĄ ą┤ą░ą╗čīąĮąŠą╝ąĄčĆčŗ. ą┐čĆąŠą▒ą╗ąĄą╝ą░, ą║ąŠąĮąĄčćąĮąŠ, čü ąĘą░ą┐čāčüą║ąŠą╝ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ. ąóą░ą╣ą╝ąĄčĆąŠą▓ čā ą╝ąĄąĮčÅ ąĮąĄčé čüą▓ąŠą▒ąŠą┤ąĮčŗčģ, ą░ ą┤ą╗čÅ ą┤ą░ą╗čīąĮąŠą╝ąĄčĆąŠą▓ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčģ čüąĄą╝ą┐ą╗ąĖčĆąŠą▓ą░čéčī čü ą┐ąĄčĆąĖąŠą┤ąŠą╝ 500ą╝ą║čü, ą░ ąĮąĄ 2.5ą╝čü, ą║ą░ą║ čā ą╝ąĄąĮčÅ čüąĄą╣čćą░čü. ą¤ąŠčŹč鹊ą╝čā ą┐čĆąĖčłą╗ąŠčüčī ą┐ąĄčĆąĄąĮą░čüčéčĆąŠąĖčéčī SysTick čéą░ą╣ą╝ąĄčĆ ąĖ ąĘą░ą┐čāčüą║ ąĮą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ąĘą░ą┐čāčüą║ą░čéčī ąŠčéčéčāą┤ą░. ą¤čĆąĖ čŹč鹊ą╝, čĆą░ąĘą╝čŗčłą╗čÅčÄ ąĮą░ č鹥ą╝čā ą░ ąĮąĄ čāčüčéą░ąĮąŠą▓ąĖčéčī ą╗ąĖ ą╝ąĮąĄ ą┐ąŠčĆąŠą│ąĖ ąĮą░ ąÉą”ą¤, čćč鹊ą▒čŗ ą▓ąŠąĘąĮąĖą║ą░ą╗ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ąĄčüą╗ąĖ ą┐čĆąĖ čĆą░ą▒ąŠč鹥 ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą▒ą░čéą░čĆąĄąĖ ą┐čĆąŠčüčÅą┤ąĄčé ąĮąĖąČąĄ ą║čĆąĖčéąĖč湥čüą║ąŠą│ąŠ ąĖą╗ąĖ ą┐ąŠą║ą░ąĘą░ąĮąĖčÅ ą┤ą░ą╗čīąĮąŠą╝ąĄčĆąŠą▓ ą┐ąŠą║ą░ąČčāčé ąŠą┐ą░čüąĮąŠąĄ ą┐čĆąĖą▒ą╗ąĖąČąĄąĮąĖąĄ ą║ ą┐čĆąĄą│čĆą░ą┤ąĄ. ąóąĄčģąĮąĖč湥čüą║ąĖ čéą░ą║ą░čÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĄčüčéčī.
ą¤ąŠčüą╝ąŠčéčĆąĄą▓, čćč鹊 ąĄčüčéčī ą║ą░čéą░ą╗ąŠą│ čü ą┐čĆąŠąĄą║č鹊ą╝, ą║ąŠč鹊čĆčŗą╣ čłąĄą▓ąĄą╗ąĖčé čĆčāą║ąŠą╣, čĆąĄčłąĖą╗ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ą║ą░ą║ąĖąĄ ąĄčüčéčī ąĄčēąĄ ą┐čĆąŠąĄą║čéčŗ. ąś ąĮą░čłąĄą╗, čćč鹊 čéą░ą╝ čü ąĮąĄąĘą░ą┐ą░ą╝čÅčéąĮčŗčģ ą▓čĆąĄą╝ąĄąĮ ąĄčüčéčī ą┤ą▓ą░ ą║ą░čéą░ą╗ąŠą│ą░/ą┐čĆąŠąĄą║čéą░ Competition_Distance ąĖ Competition_BLE. ą¤ąŠą┐čĆąŠą▒ąŠą▓ą░ą╗ čüąŠą▒čĆą░čéčī ą┐ąĄčĆą▓čŗą╣, ąĮąĄ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī. ąźąĖą┤ąĄčĆ-čäą░ą╣ą╗ Tachometr.h ąĮąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą▓čŗąĘąŠą▓čā čäčāąĮą║čåąĖąĖ ąĖąĘ tachometr.obj. ą» čéą░ą║ ą┐ąŠąĮčÅą╗, čćč鹊 čéą░ą╝ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čäčāąĮą║čåąĖčÅ ąĄčēąĄ čüčéą░čĆąŠą│ąŠ čéąĖą┐ą░, ą║ąŠą│ą┤ą░ ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą▓ čäčāąĮą║čåąĖčÄ ą┐ąĄčĆąĄą┤ą░ą▓ą░ą╗ąĖčüčī 6 čüčüčŗą╗ąŠą║ ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čĆą░čēąĄąĮąĖčÅ, čćąĖčüą╗ąŠ čłą░ą│ąŠą▓ ąĖ č鹥ą║čāčēąĖąĄ ąŠą▒ąŠčĆąŠčéčŗ ą║ąŠą╗ąĄčü, ą░ ą▓ ąĮąŠą▓ąŠą╣ čéą░ą╝ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┤ą▓ąĄ čüčüčŗą╗ą║ąĖ ąĮą░ čüčéčĆčāą║čéčāčĆčŗ, čüąŠą┤ąĄčƹȹ░čēąĖąĄ čŹčéąĖ ąČąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ. ąöčāą╝ą░ą╗-ą┤čāą╝ą░ą╗, ą░ ą┐ąŠč鹊ą╝ ąĮą░čćą░ą╗ čüčĆą░ą▓ąĮąĖą▓ą░čéčī čĆą░ąĘąĮčŗąĄ ą▓ąĄčĆčüąĖąĖ ąĖ ąŠą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 ą▓ ąĮąŠą▓ąŠą╣ ą▓ąĄčĆčüąĖąĖ čŹč鹊 ąĮąĄčüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ čāąČąĄ čāčüčéčĆą░ąĮąĄąĮąŠ. ąĪą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ą╗. ąĘą░ą┐čāčüčéąĖą╗. ąØčā ą┤ą░, čĆą░ą▒ąŠčéą░ąĄčé: ą┐čĆąĖ ą┐čĆąĖą▒ą╗ąĖąČąĄąĮąĖąĖ ą║ ą┐čĆąĄą┐čÅčéčüčéą▓ąĖčÄ ą┐ąŠą▓ąŠčĆą░čćąĖą▓ą░ąĄčéčüčÅ ąĖ ą║ą░čéąĖčéčüčÅ ą▓ ą┤čĆčāą│čāčÄ čüč鹊čĆąŠąĮčā. ąØąŠ ą║ą░ą║-č鹊 ą┐čĆąĖą╝ąĖčéąĖą▓ąĮąŠ. ąĪą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ą╗ ą▓č鹊čĆąŠą╣ ą┐čĆąŠąĄą║čé, čéą░ą╝ ąĮą░ą┤ąŠ ąĄčēąĄ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčīčüčÅ č湥čĆąĄąĘ bluetooth, ąĮąŠ ą┤ą░ąČąĄ ą▒ąĄąĘ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąĮą░ ą┤ąĖčüą┐ą╗ąĄąĄ čŹčéą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą▓čŗą┤ą░čæčé "ą┤ąĖą░ą│ąĮąŠčüčéąĖą║čā": čüąŠčüč鹊čÅąĮąĖąĄ bump-čüąĄąĮčüąŠčĆąŠą▓ ąĖ ą┐ąŠą║ą░ąĘą░ąĮąĖąĄ čüąĄąĮčüąŠčĆąŠą▓-ą┤ą░ą╗čīąĮąŠą╝ąĄčĆąŠą▓. ąØčā, čģąŠčéčÅ ą▒čŗ čāą▒ąĄą┤ąĖą╗čüčÅ, čćč鹊 ą┤ą░ą╗čīąĮąŠą╝ąĄčĆčŗ čĆą░ą▒ąŠčéą░čÄčé.
ąóąĄą┐ąĄčĆčī ąĮą░ą┤ąŠ čüčéčĆąŠąĖčéčī ą┐ąŠą╗ąĖą│ąŠąĮ ąĖ ą┐čŗčéą░čéčīčüčÅ ąĮą░čāčćąĖčéčī čĆąŠą▒ąŠčéą░ čéą░ą╝ ąŠčĆąĖąĄąĮčéąĖčĆąŠą▓ą░čéčīčüčÅ. ąś čéčāčé čÅ čāąČąĄ ą▓ąĖąČčā ą┐čĆąŠą▒ą╗ąĄą╝čŗ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą║ą░ ąĮąĄ ąĘąĮą░čÄ ą║ą░ą║ čĆąĄčłąĖčéčī.
_________________
ąÉ ą╗čÄą┤ąĖ ą┐ąŠčüą╝ąŠčéčĆčÅčé ąĖ čüą║ą░ąČčāčé: "ąĪąŠą▒ą░ą║ąĖ ą╗ąĄčéčÅčé. ąÆąŠčé ąĖ ąŠčüąĄąĮčī."
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
uldemir
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ą¤čé čüąĄąĮ 11, 2020 15:58:07 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214
ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
|
ąĪąĄą│ąŠą┤ąĮčÅ ąĘą░ą╝ąĄčéąĖą╗, čćč鹊 ą▓čŗą╗ąŠąČąĖą╗ąĖ ąŠą┤ąĮąŠą╝ąĖąĮčāčéąĮąŠąĄ ą▓ąĖą┤ąĄąŠ ąŠ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅčģ. ą¤čĆą░ą▓ą┤ą░, linefollower-čŗ čéčāą┤ą░ ąĮąĄ ą┐ąŠą┐ą░ą╗ąĖ. ąØą░ą▓ąĄčĆąĮąŠąĄ, ąĮąĄ čéą░ą║ąĖąĄ ąĘčĆąĄą╗ąĖčēąĮčŗąĄ:
ąĪą┐ąŠą╣ą╗ąĄčĆ
_________________
ąÉ ą╗čÄą┤ąĖ ą┐ąŠčüą╝ąŠčéčĆčÅčé ąĖ čüą║ą░ąČčāčé: "ąĪąŠą▒ą░ą║ąĖ ą╗ąĄčéčÅčé. ąÆąŠčé ąĖ ąŠčüąĄąĮčī."
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
uldemir
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü čüąĄąĮ 13, 2020 11:43:11 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214
ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
Ser60 ą┐ąĖčüą░ą╗(ą░): ą¦č鹊 ą▒čāą┤ąĄčé ąĄčüą╗ąĖ čĆąŠą▒ąŠčé ą▓čŗą╗ąĄčéąĖčé čü čéčĆą░čüčüčŗ? ąŚą░ą▓ąĖčüąĖčé ąŠčé ą┐čĆą░ą▓ąĖą╗ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅ. ąŻ ąĮą░čü ą▓ ą┐čĆą░ą▓ąĖą╗ą░čģ ąĮą░ą┐ąĖčüą░ąĮąŠ, čćč鹊 ąĄčüą╗ąĖ čĆąŠą▒ąŠčé ą┐ąŠč鹥čĆčÅąĄčé ą╗ąĖąĮąĖčÄ, ąŠąĮ ą╝ąŠąČąĄčé ą▓ąĄčĆąĮčāčéčīčüčÅ ąĮą░ čéčĆą░čüčüčā čü čü č鹊ą╣ č鹊čćą║ąĖ, ą│ą┤ąĄ ą╗ąĖąĮąĖčÅ ą▒čŗą╗ą░ ą┐ąŠč鹥čĆčÅąĮą░ ąĖą╗ąĖ ą┤ąŠ ąĮąĄčæ. ąÆ ą╝ąĄąČą┤čāąĮą░čĆąŠą┤ąĮčŗčģ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅčģ Robotex, čćč鹊 ą┐čĆąŠą▓ąŠą┤čÅčé ą▓ ąóą░ą╗ą╗ąĖąĮąĄ, ąĮą░ą┐ąĖčüą░ąĮąŠ, čćč鹊 čĆąŠą▒ąŠčé ą┤ąŠą╗ąČąĄąĮ ą▓čüčæ ą▓čĆąĄą╝čÅ ąĮą░ą║čĆčŗą▓ą░čéčī ą╗ąĖąĮąĖčÄ. ąó.ąĄ. čüč鹊ąĖčé čüčŖąĄčģą░čéčī, ą║ą░ą║ ąĮąĄąĘą░č湥čé. ą¤ąŠ ą┐ąŠą▓ąŠą┤čā BT, čÅ čāąČąĄ ąČą░ą╗ąĄčÄ, čćč鹊 ą▓ ąĮą░čćą░ą╗ąĄ ą╗ąĄčéą░ ąĮąĄ ąĘą░ą║ą░ąĘą░ą╗ ą┐ą╗ą░čéčŗ ą┤ą╗čÅ ą┐čāą╗čīčéą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĮą░ BGM13 - ą┤ą░ąČąĄ čü ą╝ąĄą┤ą╗ąĄąĮąĮąŠą╣ ą┐ąŠčćč鹊ą╣ čāąČąĄ ą▒čŗ ą┐čĆąĖąĄčģą░ą╗ąĖ. ąÆčüčæ ąČą┤ą░ą╗, ą║ąŠą│ą┤ą░ ą┐ąŠčÅą▓ąĖčéčüčÅ ąĮąŠą▓ą░čÅ ąĖą┤ąĄčÅ, čćč鹊ą▒čŗ ąŠą▒čŖąĄą┤ąĖąĮąĖčéčī ąĘą░ą║ą░ąĘ ąĖ ą┤ąŠčüčéą░ą▓ą║čā čüą┤ąĄą╗ą░čéčī ą║čāčĆčīąĄčĆąŠą╝. ąØąŠ, čŹč鹊 č鹊ąČąĄ ąĖą┤čæčé ą╝ąĄą┤ą╗ąĄąĮąĮąŠ, ą┐ąŠč鹊ą╝čā ą║ą░ą║ ą┐čĆąĖą┤čæčéčüčÅ čĆą░ąĘčĆčŗą▓ą░čéčīčüčÅ ąĮą░ ą┤ą▓ąĄ čćą░čüčéąĖ: ą┐ąĖčüą░čéčī čģąŠčüčé ąĖ ą┐ąĖčüą░čéčī ą║ą╗ąĖąĄąĮčéą░. ąś ą║ą░ąČą┤ąŠą│ąŠ ąĮą░ą┤ąŠ ąŠčéą╗ą░ąČąĖą▓ą░čéčī. ąØą░ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅčģ čā ą║ąŠą╗ą╗ąĄą│ ąĘą░ą╝ąĄčéąĖą╗ ąĮą░ čĆąŠą▒ąŠčéą░čģ ą┤ą╗čÅ folkrace ą│ąĮąĄąĘą┤čŗčłą║ąŠ ą┤ą╗čÅ ą╝ąĖą║čĆąŠSD ą║ą░čĆč鹊čćą║ąĖ. ą¤ąŠčģąŠąČąĄ, ąŠąĮąĖ čéą░ą╝ č鹊ąČąĄ ą┐ąĖčłčāčé ąČčāčĆąĮą░ą╗. ą» ą▓ č乥ą▓čĆą░ą╗ąĄ ą▒čŗą╗ ąĘą░ą║ą░ąĘą░ą▓čłąĖ ą╝ąŠą┤čāą╗čī čü OpenLog, ąĮąŠ ąĖąĘ-ąĘą░ ą║ąŠčĆąŠąĮąŠą▓ąĖčĆčāčüą░ čü ąÜąĖčéą░čÅ ąŠąĮąĖ čéą░ą║ ąĖ ąĮąĄ ą┐čĆąĖčłą╗ąĖ. ąØąŠ ą╝ąĮąĄ čüą║ą░ąĘą░ą╗ąĖ, čćč鹊 čā ąĮąĖčģ ą▓ čĆąŠą▒ąŠč鹥 čüč鹊ąĖčé čćč鹊-č鹊 ą┤čĆčāą│ąŠąĄ, ąĮą░ stm32, ą║ąŠč鹊čĆą░čÅ č鹊ąČąĄ ą┐ąŠ UART ą┐čĆąĖąĮąĖą╝ą░ąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąĖ ą┐ąĖčłąĄčé ąĮą░ SD ąĖčüą┐ąŠą╗čīąĘčāčÅ quadSPI, ą░ ąĮąĄ ą┐čĆąŠčüč鹊 SPI. ąś čüą║ą░ąĘą░ą╗ąĖ, čćč鹊 čü ąŠč湥ąĮčī ą▒ąŠą╗čīčłąŠą╣ čüą║ąŠčĆąŠčüčéčīčÄ. ąÆąŠčé č鹊ą╗čīą║ąŠ, čÅ ąĮąĄ ą╝ąŠą│čā ąĮą░ą╣čéąĖ ą▓ ąĖąĮč鹥čĆąĮąĄč鹥, čŹč鹊čé ą┐čĆąŠąĄą║čé. ąĀą░ąĘą╝čŗčłą╗čÅą╗, ą┐ąŠč湥ą╝čā čüčéą░čĆčŗą╣ čĆąŠą▒ąŠčé, ąŠą║ą░ąĘą░ą╗čüčÅ ąĮą░ ą┐ąĄčĆą▓ąŠą╝ ą╝ąĄčüč鹥. ąśąĘčāčćą░ą╗ ąŠčéčüąĮčÅčéčŗąĄ ą▓ąĖą┤ąĄąŠ ąĖ ąĘą░ą╝ąĄčéąĖą╗, čćč鹊 ą▓ ąĮą░čćą░ą╗ąĄ (ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮčŗą╣ ąĘą░ąĄąĘą┤), čĆąŠą▒ąŠčé ą┤ąŠą▓ąŠą╗čīąĮąŠ čüąĖą╗čīąĮąŠ ąĘą░ąĮąŠčüąĖą╗ąŠ ąĮą░ ą┐ąŠą▓ąŠčĆąŠčéą░čģ, ą░ ą▓ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╝ (ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮčŗą╣) čĆąŠą▒ąŠčéą░ ąĮąĄ ąĘą░ąĮąŠčüąĖą╗ąŠ, ąĮąŠ ąĖ ą║ ą╗ąĖąĮąĖąĖ čüąĄąĮčüąŠčĆ ą▓ąŠąĘą▓čĆą░čēą░ą╗čüčÅ ą┐ąŠąĘą┤ąĮąĄąĄ. ąÆąŠąĘą╝ąŠąČąĮąŠ, čŹč鹊 ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 čÅ "ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ą╗" ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ čüą║ąŠčĆąŠčüčéčī čĆąŠą▒ąŠčéą░ čü ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╝ąĖ ąŠą▒ąŠčĆąŠčéą░ą╝ąĖ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ. ąó.ąĄ. ą┐čĆąĖ ą┐ąŠą▓ąŠčĆąŠč鹥, ą║ąŠą╗ąĄčüąŠ ąĮą░ ą▓ąĮąĄčłąĮąĄą╣ ą║ąŠą╗ąĄąĄ ąĮąĄ čāčüą║ąŠčĆčÅą╗ąŠčüčī, ą░ č鹊ą╗čīą║ąŠ č鹊čĆą╝ąŠąĘąĖą╗ąŠčüčī ąĮą░ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣. ą¤čĆą░ą▓ą┤ą░, ąĄčüčéčī ąĄčēąĄ ąŠą┤ąĖąĮ ą╝ąŠą╝ąĄąĮčé. ą» ąĮąĄ ąĘąĮą░čÄ, čćč鹊 ąĘą░ ą┐čĆąŠčłąĖą▓ą║ą░ ąĮą░čģąŠą┤ąĖą╗ą░čüčī ą▓ąĮčāčéčĆąĖ čĆąŠą▒ąŠčéą░. ąÜą░ą║ čāąČąĄ ą┐ąĖčüą░ą╗, čŹč鹊čé čĆąŠą▒ąŠčé ą┐čĆąŠą▓ą░ą╗čÅą╗čüčÅ ą▓ ą║ąŠčĆąŠą▒ą║ąĄ ą▒ąĄąĘ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣ čü č乥ą▓čĆą░ą╗čīčüą║ąĖčģ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖą╣, ąĮąŠ ąĖčüčģąŠą┤ąĮąĖą║ąĖ čÅ ą║ąŠčĆčĆąĄą║čéąĖčĆąŠą▓ą░ą╗ (ąĖ ąŠčéą╗ą░ąČąĖą▓ą░ą╗, č鹊ą╗čīą║ąŠ ąĮą░ ą┤čĆčāą│ąŠą╣ ą┐ą╗ą░č鹥 - čā ą╝ąĄąĮčÅ ąĖčģ ą┤ą▓ąĄ). ą¤ąŠčŹč鹊ą╝čā čÅ ąĮąĄ ą┐ąŠą╝ąĮčÄ, ą║ą░ą║ąĖąĄ čÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ č鹊ą│ą┤ą░ ą▓ č乥ą▓čĆą░ą╗ąĄ čüą┤ąĄą╗ą░ą╗. ąÉ čÅ čćč鹊-č鹊 ą┤ąĄą╗ą░ą╗. ą×ą┤ąĮą░ ąĖąĘ "ąĮąĄčüčéčŗą║ąŠą▓ąŠą║" ą▓ č鹊ą╝, čćč鹊 ąĮą░ ą▓ąĖą┤ąĄąŠ (ą┤ą░ ąĖ ą┐ąŠ čĆąĄąĘčāą╗čīčéą░čéą░ą╝ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖą╣) čÅ ą▓ąĖąČčā, čćč鹊 čĆąŠą▒ąŠčé ą▒ąĄąČąĖčé ą┐ąŠ čéčĆą░čüčüąĄ 14 čüąĄą║čāąĮą┤ ąĖ ą▓čŗą║ą╗čÄčćą░ąĄčéčüčÅ. ąÉ ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, čÅ ą▓ąĖąČčā, čćč鹊 čŹč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ čā ą╝ąĄąĮčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ 35 čüąĄą║čāąĮą┤! ąó.ąĄ. čĆą░ąĘąĮąĖčåą░ ą▓ 2.5 čĆą░ąĘą░. ąś čŹčéą░ čĆą░ąĘąĮąĖčåą░ ą║ą░ą║ čĆą░ąĘ ąĖ ąĄčüčéčī ą╝ąĄąČą┤čā čćą░čüč鹊č鹊ą╣ čü菹╝ą┐ą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ ą╗ąĖąĮąĖąĖ čā čĆą░ąĘąĮčŗčģ čĆąŠą▒ąŠč鹊ą▓: čā stm32 - 400 čĆą░ąĘ ą▓ čüąĄą║čāąĮą┤čā, ą░ čā PSoC5 - 1000 čĆą░ąĘ ą▓ čüąĄą║čāąĮą┤čā. ąÆčĆąŠą┤ąĄ ą║ą░ą║ čā ą╝ąĄąĮčÅ ą▒čŗą╗ą░ ą╝čŗčüą╗čī ąĖ čā čĆąŠą▒ąŠčéą░ ąĮą░ stm32 ą┐ąŠą▓čŗčüąĖčéčī čćą░čüč鹊čéčā, ą▓ąŠčé č鹊ą╗čīą║ąŠ ąĮąĄ ą┐ąŠą╝ąĮčÄ, čüą┤ąĄą╗ą░ą╗ čÅ čŹč鹊 ąĖą╗ąĖ ąĮąĄčé. ąÆ č鹥ą║čāčēąĖčģ ąĖčüčģąŠą┤ąĮąĖą║ą░čģ čüč鹊ąĖčé 400. ąöčāą╝ą░ą╗, ą┐ąŠą┤ą║ą╗čÄčćąĖčéčīčüčÅ ą┤ąĄą▒ą░ą│ą│ąĄčĆąŠą╝ ąĖ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī čćč鹊 ąĘą░ ąĘąĮą░č湥ąĮąĖčÅ ą│čĆčāąĘčÅčéčüčÅ ą▓ čéą░ą╣ą╝ąĄčĆčŗ, ąĮąŠ ą┤ąĄą▒ą░ą│ą│ąĄčĆ čüčéčæčĆ ą┐čĆąŠčłąĖą▓ą║čā ąĖ ąĘą░ą│čĆčāąĘąĖą╗ čüą▓ąŠčÄ. ąØą░ą▓ąĄčĆąĮąŠąĄ, ąĮą░ą┤ąŠ ą▒čŗą╗ąŠ ą│ą┤ąĄ-č鹊 ą▓ ąĮą░čüčéčĆąŠą╣ą║ą░čģ čüąĮčÅčéčī ą║ą░ą║čāčÄ ą│ą░ą╗ąŠčćą║čā, čćč鹊ą▒čŗ ą┐čĆąŠą╣čéąĖčüčī ą┐ąŠą┤ ąŠčéą╗ą░ą┤čćąĖą║ąŠą╝ ąĮąĄ ą┐ąĄčĆąĄąĘą░ą│čĆčāąČą░čÅ ą┐čĆąŠčłąĖą▓ą║čā. ąØąŠ čéą░ą║ ą║ą░ą║ čÅ čéą░ą║ąĖą╝ (ą▓ąĘą╗ąŠą╝ąŠą╝) ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ąĘą░ąĮąĖą╝ą░ą╗čüčÅ, ą▓čüčæ ąĘą░ą┐ąŠčĆąŠą╗. ąØčā ąĮą░ čüą╗ąĄą┤čāčÄčēąĖčģ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅčģ ąĮą░ą┤ąŠ ą▒čāą┤ąĄčé čŹč鹊 ąĖą╝ąĄčéčī ą▓ ą▓ąĖą┤čā ąĖ ą▒čŗčüčéčĆąĄąĮčīą║ąŠ ą┐ąĄčĆąĄą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ą┐čĆąŠčłąĖą▓ą║čā. ąÜčüčéą░čéąĖ, ą┐ąŠčüą╝ąŠčéčĆąĄą╗ čĆąĄąĘčāą╗čīčéą░čéčŗ č乥ą▓čĆą░ą╗čīčüą║ąĖčģ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖą╣ - čéą░ą╝ ą▒čŗčüčéčĆąĄąĄ ą▒čŗą╗ čĆąŠą▒ąŠčé ąĮą░ PSoC. ąóčāčé čüąĮąŠą▓ą░ ąĮą░ą┤ąŠ ąĮą░ ą┐ąŠą╝ąŠčēčī ąĘą▓ą░čéčī čüčéčĆą░č鹥ą│ąĖčÄ. ąÆąĄą┤čī ą╝ąŠąČąĮąŠ ą▓čŗąĖą│čĆą░čéčī čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖąĄ, ąĮąŠ ą┐čĆąŠąĖą│čĆą░čéčī č湥ą╝ą┐ąĖąŠąĮą░čé. ąÆ č湥ą╝ą┐ąĖąŠąĮą░č鹥 čāčćąĖčéčŗą▓ą░čÄčéčüčÅ ąĖą╝ąĄąĮąĮąŠ čĆąŠą▒ąŠčéčŗ (ą┐ąŠ ąĖą╝ąĄąĮą░ą╝), ą┐ąŠčŹč鹊ą╝čā ąĄčüą╗ąĖ čÅ ąĮą░ čüą╗ąĄą┤čāčÄčēąĖčģ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅčģ ą▓čŗčüčéą░ą▓ą╗čÄ ąĮąŠą▓čŗą╣ čĆąŠą▒ąŠčé ąĖ ą┤ą░ą╝ ąĄą╝čā ą┤čĆčāą│ąŠąĄ ąĖą╝čÅ - ąŠąĮ ąĮą░čćąĮčæčé čüą▓ąŠą╣ ą┐čāčéčī ą┐ąŠ-ąĮąŠą▓ąŠą╣, ą▒ąĄąĘ čāč湥čéą░ "ą┐čĆąŠčłą╗čŗčģ ąĘą░čüą╗čāą│". ą¤ąŠčŹč鹊ą╝čā čÅ ą╝ąŠą│čā ąĄą╝čā ą┤ą░čéčī ąĖą╝čÅ č鹊ą│ąŠ čĆąŠą▒ąŠčéą░ ą║ąŠč鹊čĆčŗą╣ čāčćą░čüčéą▓ąŠą▓ą░ą╗ ą▓ ą┐čĆąŠčłą╗čŗčģ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅčģ ąĖ č鹊ą│ą┤ą░ ąŠąĮ ąĮą░čüą╗ąĄą┤čāąĄčé čŹčéąĖ "ą┐čĆąŠčłą╗čŗąĄ ąĘą░čüą╗čāą│ąĖ". ąś ą▓ąŠčé č鹥ą┐ąĄčĆčī, ąĄčüą╗ąĖ čÅ ą┤ąŠą▓ąĄą┤čā ą┤ąŠ čāą╝ą░ čĆąŠą▒ąŠčéą░ ąĮą░ PSoC ąĖ ąŠąĮ ą┐ąŠč鹥čüąĮąĖčé čĆąŠą▒ąŠčéą░ ąĮą░ stm32... čÅ ą┐čĆąŠąĖą│čĆą░čÄ. "ąĪčéą░ą▓ą║čā" ąĮą░ čĆąŠą▒ąŠčéą░ ą╝ąŠąČąĮąŠ čüą┤ąĄą╗ą░čéčī ą┤ąŠ ą┐čĆąŠčģąŠąČą┤ąĄąĮąĖčÅ č鹥čģ ąĖąĮčüą┐ąĄą║čåąĖąĖ. ąó.ąĄ. ą┤ąŠ č鹥čģąĖąĮčüą┐ąĄą║čåąĖąĖ, čÅ ą┤ąŠą╗ąČąĄąĮ ąĮą░ąĘą▓ą░čéčī - čŹč鹊čé čĆąŠą▒ąŠčé ąĖą╝ąĄąĄčé čéą░ą║ąŠąĄ ąĖą╝čÅ, ą░ čŹč鹊čé - čéą░ą║ąŠąĄ. ąś ą┐ąŠ čŹčéąĖą╝ ąĖą╝ąĄąĮą░ą╝ ąŠąĮąĖ ąĖ ą▒čāą┤čāčé čāčćą░čüčéą▓ąŠą▓ą░čéčī ą▓ čéčāčĆąĮąĖčĆąĄ. ąóą░ą║ čćč鹊 ąĮą░ą┤ąŠ ą┤ąŠą▓ąĄčüčéąĖ ą┤ąŠ čāą╝ą░ ą╝ąŠą╣ ąĖąĘą╝ąĄčĆąĖč鹥ą╗čī ą▓čĆąĄą╝ąĄąĮąĖ, čćč鹊 ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąŠą┤ą│ąŠč鹊ą▓ą║ąĖ ą▓čŗčÅčüąĮąĖčéčī, čā ą║ą░ą║ąŠą│ąŠ čĆąŠą▒ąŠčéą░ ą▒ąŠą╗čīčłąĄ čłą░ąĮčüąŠą▓ čüčéą░čéčī ą╗čāčćčłąĖą╝ ąĖ ąĄą│ąŠ čāąČąĄ čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░čéčī ą┐ąŠą┤ č鹥ą╝ ąĖą╝ąĄąĮąĄą╝, ą║ąŠč鹊čĆąŠąĄ ąĘą░ąĮčÅą╗ąŠ ą┐ąĄčĆą▓ąŠąĄ ą╝ąĄčüč鹊 ąĮą░ ą┐čĆąĄą┤čŗą┤čāčēąĖčģ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅčģ. Ser60 ą┐ąĖčüą░ą╗(ą░): ą¤ąŠčģąŠąČąĄ, čü ąĮąŠčłąĄąĮąĖąĄą╝ ą╝ą░čüąŠą║ ąĮą░čĆąŠą┤ čĆąĄčłąĖą╗ ąĮąĄ ąĘą░ą╝ąŠčĆą░čćąĖą▓ą░čüčÅ, ąĖą╗ąĖ ąŠąĮąĖ čāąČąĄ čā ą▓ą░čü ąĮąĄą░ą║čéčāą░ą╗čīąĮčŗ? ąŻ ąĮą░čü - ąĮąĄą░ą║čéčāą░ą╗čīąĮąŠ. ą¤ąŠčģąŠąČąĄ ąĖąĘ ą▓čüąĄą╣ ąĢą▓čĆąŠą┐čŗ, čā ąĮą░čü čüą░ą╝čŗą╣ ąĮąĖąĘą║ąĖą╣ ą┐čĆąŠčåąĄąĮčé ąĘą░ą▒ąŠą╗ąĄą▓ą░ąĄą╝ąŠčüčéąĖ. ąóčāčé ą║ą░ąČą┤čāčÄ ą┐čÅčéąĮąĖčåčā ą┐čĆą░ą▓ąĖč鹥ą╗čīčüčéą▓ąŠ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčé čüą║ąŠą╗čīą║ąŠ ą▓ ą║ą░ą║ąŠą╣ čüčéčĆą░ąĮąĄ čćąĖčüą╗ąŠ ąĘą░ą▒ąŠą╗ąĄą▓čłąĖčģ ąĖ ąĄčüą╗ąĖ ą┐čĆąĄą▓čŗčłą░ąĄčéčüčÅ ą┐ąŠčĆąŠą│ 16 č湥ą╗ąŠą▓ąĄą║ ąĮą░ 100 čéčŗčüčÅčć ąĮą░čüąĄą╗ąĄąĮąĖčÅ, č鹊 čéą░ą║ą░čÅ čüčéčĆą░ąĮą░ ą┐ąŠą┐ą░ą┤ą░ąĄčé ą▓ ąČąĄą╗čéčŗą╣ čüą┐ąĖčüąŠą║ ąĖ ą┐čĆąĖąĄčģą░ą▓čłąĖą╝ (ąĖą╗ąĖ ą▓ąĄčĆąĮčāą▓čłąĖą╝čüčÅ) ąĖąĘ č鹊ą╣ čüčéčĆą░ąĮčŗ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čüąŠą▒ą╗čÄą┤ą░čéčī ą┤ą▓čāčģąĮąĄą┤ąĄą╗čīąĮčŗą╣ ą║ą░čĆą░ąĮčéąĖąĮ. ąæčāą║ą▓ą░ą╗čīąĮąŠ ąĘą░ ą┤ąĄąĮčī ą┐ąĄčĆąĄą┤ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅą╝ąĖ, ą┐čĆąŠčłą╗ą░ ąĖąĮč乊čĆą╝ą░čåąĖčÅ, čćč鹊 ąøąĖčéą▓ą░ ą┐ąĄčĆąĄčüčéčāą┐ąĖą╗ą░ čŹč鹊čé ą┐ąŠčĆąŠą│, ąĮąŠ ą┐čĆą░ą▓ąĖč鹥ą╗čīčüčéą▓ąŠ, č鹥ą╝ ąĮąĄ ą╝ąĄąĮąĄąĄ, čĆąĄčłąĖą╗ąŠ ą┐ąŠą║ą░ ąøąĖčéą▓čā ąĮąĄ ą▓ą║ą╗čÄčćą░čéčī ą▓ čŹč鹊čé čüą┐ąĖčüąŠą║. ąŚą░č鹊 ą▓ čŹčéčā ą┐čÅčéąĮąĖčåčā ąŁčüč鹊ąĮąĖčÅ ą┐ąŠą┐ą░ą╗ą░ ą▓ čüą┐ąĖčüąŠą║. ą¤ąŠč湥ą╝čā čā ąĮą░čü čéą░ą║ąŠą╣ ąĮąĖąĘą║ąĖą╣ ą┐čĆąŠčåąĄąĮčé ąĘą░ą▒ąŠą╗ąĄą▓ą░ąĄą╝ąŠčüčéąĖ? ąÉ ąźąĢąŚ. ą£ąŠąČąĄčé čā ąĮą░čü ąĮą░čüąĄą╗ąĄąĮąĖčÅ čĆąĄą░ą╗čīąĮąŠ ą│ąŠčĆą░ąĘą┤ąŠ ą╝ąĄąĮčīčłąĄ, č湥ą╝ čüčćąĖčéą░ąĄčéčüčÅ "ąŠčäąĖčåąĖą░ą╗čīąĮąŠ". ą£ąŠąČąĄčé čā ąĮą░čü č鹥čüč鹊ą▓ ą┐čĆąŠą▓ąŠą┤ąĖčéčüčÅ ą╝ą░ą╗ąŠ. ąÆ čüą░ą╝ąŠą╝ ąĮą░čćą░ą╗ąĄ č鹥čüčé čüč鹊ąĖą╗ 80 čü ą╗ąĖčłąĮąĖą╝ ąĄą▓čĆąŠ, ą░ ą║ą░č鹥ą│ąŠčĆąĖą╣ ą╗čÄą┤ąĄą╣, ą║č鹊 ą╝ąŠą│ čüą┤ą░čéčī č鹥čüčé ą▒ąĄčüą┐ą╗ą░čéąĮąŠ ą▒čŗą╗ąŠ ąŠč湥ąĮčī ą╝ą░ą╗ąŠ. ąĪąĄą╣čćą░čü, ą║ąŠąĮąĄčćąĮąŠ ą▒ąĄčüą┐ą╗ą░čéąĮąŠ, ąĮąŠ ą┐ąŠ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠą╣ ąĘą░ą┐ąĖčüąĖ. ąÉ ą║ąŠą╝čā ąŠčģąŠčéą░ ą┤ąŠą▒čĆąŠą▓ąŠą╗čīąĮąŠ čüąĄčüčéčī ąĮą░ ą║ą░čĆą░ąĮčéąĖąĮ. ą£ąŠąČąĄčé čéčāčé ą╝ąĮąŠą│ąĖąĄ čāąČąĄ ą▓čéąĖčģą░čĆčÅ ą┐ąĄčĆąĄą▒ąŠą╗ąĄą╗ąĖ. ąÉ ą╝ąŠąČąĄčé, ą╝čŗ čāąČąĄ ą┤ą░ą▓ąĮąŠ ąĖą╝ ą┐ąĄčĆąĄą▒ąŠą╗ąĄą╗ąĖ. ąÜąŠą│ą┤ą░ ą▒čŗą╗ ąĮą░ čüąŠčĆąĄą▓ąĮąŠą▓ą░ąĮąĖčÅčģ ą▓ č乥ą▓čĆą░ą╗ąĄ (ą¦ąĪ ąŠą▒čŖčÅą▓ąĖą╗ąĖ č鹊ą╗čīą║ąŠ 12 ą╝ą░čĆčéą░), ą╝ąĄąĮčÅ ą┐ąŠčĆą░ąĘąĖą╗ąŠ, čćč鹊 ą┐ąŠčćčéąĖ ą▓čüąĄ ą┐ąŠą│ąŠą╗ąŠą▓ąĮąŠ čłą║ąŠą╗čīąĮąĖą║ąĖ čłą╝čŗą│ą░ą╗ąĖ ąĮąŠčüą░ą╝ąĖ ąĖ ą║ą░čłą╗čÅą╗ąĖ. ąÉ ą╝ąŠąČąĄčé, čā ąĮą░čü ą▓čŗčłąĄ čāčüč鹊ą╣čćąĖą▓ąŠčüčéčī ą║ čŹč鹊ą╣ ąĘą░čĆą░ąĘąĄ - čéą░ą║ ą║ą░ą║ čā ąĮą░čü ą│čĆąĖą┐ą┐, čŹč鹊 ąĮąŠčĆą╝ą░ą╗čīąĮą░čÅ čüąĄąĘąŠąĮąĮą░čÅ ą▒ąŠą╗ąĄąĘąĮčī. ąöą░ąČąĄ, ąĮą░čćąĖąĮą░čÄ ą▒ąĄčüą┐ąŠą║ąŠąĖčéčīčüčÅ, ąĄčüą╗ąĖ ąĘą░ ąĘąĖą╝čā ąĮąĄ ą┐ąĄčĆąĄą▒ąŠą╗ąĄčÄ. ą¤ąŠčŹč鹊ą╝čā, čā ąĮą░čü ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ, ą▓ąŠąĘą╝ąŠąČąĮąŠ ąĖ ąĮąĄ ąĘą░ą╝ąĄčéąĖą╗ąŠ, čćč鹊 ą┐ąĄčĆąĄą▒ąŠą╗ąĄą╗ąŠ. ą¤ąŠą▓čÅąĘą║ąĖ ą▒čŗą╗ąŠ ąŠą┤ąĮąŠ ą▓čĆąĄą╝čÅ ąŠą▒čÅąĘą░č鹥ą╗čīąĮčŗ ą║ ąĮąŠčłąĄąĮąĖčÄ ą▓ ąŠą▒čēąĄčüčéą▓ąĄąĮąĮąŠą╝ čéčĆą░ąĮčüą┐ąŠčĆč鹥, ąĮąŠ čéą░ą║ ą║ą░ą║ ąĮąĄ čéčĆąĄą▒ąŠą▓ą░ą╗ąŠčüčī ąĖą╝ąĄąĮąĮąŠ ą╝ą░čüą║ą░, ą░ ą┤ąŠčüčéą░č鹊čćąĮąŠ, čćč鹊ą▒čŗ ą╗čÄą▒ąŠą╣ čéčĆčÅą┐ą║ąŠą╣ ą▒čŗą╗ ą┐čĆąĖą║čĆčŗčé ąĮąŠčü ąĖ čĆąŠčé - č鹊ąČąĄ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą▒čŗčüčéčĆąŠ ąĮą░čćą░ą╗ąŠ ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčī čŹč鹊 čéčĆąĄą▒ąŠą▓ą░ąĮąĖąĄ. ąĪąĄą╣čćą░čü čŹč鹊 č鹊ą╗čīą║ąŠ čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖčÅ ąĖ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ąĮčāąČąĮąŠ ąĮąŠčüąĖčéčī, č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ąĄčüčéčī čÅą▓ąĮčŗąĄ ą┐čĆąĖąĘąĮą░ą║ąĖ ąĘą░ą▒ąŠą╗ąĄą▓ą░ąĮąĖčÅ ą▓ąĄčĆčģąĮąĖčģ ą┤čŗčģą░č鹥ą╗čīąĮčŗčģ ą┐čāč鹥ą╣ (čćč鹊 č鹊ąČąĄ ą▓čüąĄą╝ąĖ ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ). ąÜčüčéą░čéąĖ, čā ąĮą░čü čģąŠą┤ąĖčé ą░ąĮąĄą║ą┤ąŠčé, čćč鹊 ą║ąŠą│ą┤ą░ ą┐čĆą░ą▓ąĖč鹥ą╗čīčüčéą▓ąŠ ąŠą▒čŖčÅą▓ąĖą╗ąŠ, čćč鹊 ą▓čüąĄ ą┤ąŠą╗ąČąĮčŗ čüąŠą▒ą╗čÄą┤ą░čéčī ą┤ąĖčüčéą░ąĮčåąĖčÄ ą▓ 2 ą╝ąĄčéčĆą░, ąČąĖč鹥ą╗ąĖ ą▓ąŠąĘą╝čāčéąĖą╗ąĖčüčī, ą┐ąŠč湥ą╝čā ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ čüč鹊čÅčéčī čéą░ą║ č鹥čüąĮąŠ!
_________________
ąÉ ą╗čÄą┤ąĖ ą┐ąŠčüą╝ąŠčéčĆčÅčé ąĖ čüą║ą░ąČčāčé: "ąĪąŠą▒ą░ą║ąĖ ą╗ąĄčéčÅčé. ąÆąŠčé ąĖ ąŠčüąĄąĮčī."
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ą£čāčĆąĖą║
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü čüąĄąĮ 13, 2020 12:56:10 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
 |
ąÜą░čĆą╝ą░: 1
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 157
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤ąĮ ąŠą║čé 11, 2010 19:00:08
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3328
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
uldemir ą┐ąĖčüą░ą╗(ą░): ą┐ąĖčłąĄčé ąĮą░ SD ąĖčüą┐ąŠą╗čīąĘčāčÅ quadSPI, ą░ ąĮąĄ ą┐čĆąŠčüč鹊 SPI. ą¤ąŠč湥ą╝čā ąĮąĄ SDIO? ąÆąŠ ą╝ąĮąŠą│ąĖčģ STM32 ąĄčüčéčī čŹč鹊čé ą╝ąŠą┤čāą╗čī ąĖ ąŠąĮ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ čüą┐ąĄčåąĖą░ą╗čīąĮąŠ ą┤ą╗čÅ SD ą║ą░čĆčé ą┐ą░ą╝čÅčéąĖ. uldemir ą┐ąĖčüą░ą╗(ą░): ąöčāą╝ą░ą╗, ą┐ąŠą┤ą║ą╗čÄčćąĖčéčīčüčÅ ą┤ąĄą▒ą░ą│ą│ąĄčĆąŠą╝ ąĖ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī čćč鹊 ąĘą░ ąĘąĮą░č湥ąĮąĖčÅ ą│čĆčāąĘčÅčéčüčÅ ą▓ čéą░ą╣ą╝ąĄčĆčŗ, ąĮąŠ ą┤ąĄą▒ą░ą│ą│ąĄčĆ čüčéčæčĆ ą┐čĆąŠčłąĖą▓ą║čā ąĖ ąĘą░ą│čĆčāąĘąĖą╗ čüą▓ąŠčÄ. ąØą░ą▓ąĄčĆąĮąŠąĄ, ąĮą░ą┤ąŠ ą▒čŗą╗ąŠ ą│ą┤ąĄ-č鹊 ą▓ ąĮą░čüčéčĆąŠą╣ą║ą░čģ čüąĮčÅčéčī ą║ą░ą║čāčÄ ą│ą░ą╗ąŠčćą║čā, čćč鹊ą▒čŗ ą┐čĆąŠą╣čéąĖčüčī ą┐ąŠą┤ ąŠčéą╗ą░ą┤čćąĖą║ąŠą╝ ąĮąĄ ą┐ąĄčĆąĄąĘą░ą│čĆčāąČą░čÅ ą┐čĆąŠčłąĖą▓ą║čā. ąŁč鹊 ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ hot plug connection. ąÜčĆą░čéą║ąŠ ąŠą▒ ą╝ąĄč鹊ą┤ąĄ ąĖ čāčüą╗ąŠą▓ąĖčÅčģ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▓ ą£ąÜ ąĮą░ą┐ąĖčüą░ąĮąŠ ąĘą┤ąĄčüčī. http://purebasic.mybb.ru/viewtopic.php?id=564#p7600
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
uldemir
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü čüąĄąĮ 13, 2020 15:52:40 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 46
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 1368
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤čé ą░ą▓ą│ 28, 2009 21:34:30
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 7214
ą×čéą║čāą┤ą░: 845-ą╣ ą║ą╝.
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
ą£ąĄą┤ą░ą╗ąĖ: 1
|
ą£čāčĆąĖą║ ą┐ąĖčüą░ą╗(ą░): ą¤ąŠč湥ą╝čā ąĮąĄ SDIO? ąÆąŠąĘą╝ąŠąČąĮąŠ, čÅ ą┐čĆąŠčüč鹊 čüą╗ą░ą▒ ą▓ č鹥čĆą╝ąĖąĮąŠą╗ąŠą│ąĖąĖ ąĖ ą┐čĆąŠčüč鹊 ąĮąĄ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĮą░ąĘą▓ą░ą╗ čéąĖą┐ ąĖąĮč鹥čĆč乥ą╣čüą░. ą£ąĮąĄ čüą║ą░ąĘą░ą╗ąĖ, čćč鹊 ąĘą░ą┐ąĖčüčī ąĖą┤čæčé čüčĆą░ąĘčā ą┐ąŠ č湥čéčŗčĆčæą╝ ą┐čĆąŠą▓ąŠą┤ą░ą╝. ąÉ čģąŠą┤čÅčé čüą╗čāčģąĖ, čćč鹊 ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą┐čĆąĄąČąĮąĖčģ čĆąĄą░ą╗ąĖąĘą░čåąĖą╣ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖ čŹčéčā ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī, ą░ čĆą░ą▒ąŠčéą░ą╗ąĖ č鹊ą╗čīą║ąŠ č湥čĆąĄąĘ ą┐čĆąŠčüč鹊ą╣ ą▒ą░ąĘąŠą▓čŗą╣ SPI ąĖąĮč鹥čĆč乥ą╣čü. ąÜčüčéą░čéąĖ, ąĄčüą╗ąĖ ą║č鹊 ąĘąĮą░ąĄčé čéą░ą║ąŠą╣ ą┐čĆąŠąĄą║čé, ą▒čŗą╗ ą▒čŗ ą▒ą╗ą░ą│ąŠą┤ą░čĆąĄąĮ ąĘą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčāčÄ čüčüčŗą╗ą║čā.
_________________
ąÉ ą╗čÄą┤ąĖ ą┐ąŠčüą╝ąŠčéčĆčÅčé ąĖ čüą║ą░ąČčāčé: "ąĪąŠą▒ą░ą║ąĖ ą╗ąĄčéčÅčé. ąÆąŠčé ąĖ ąŠčüąĄąĮčī."
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
ą£čāčĆąĖą║
|
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ čüąŠąŠą▒čēąĄąĮąĖčÅ: Re: RSLK ąŠčé TI (Robotic System Learning Kit) ąöąŠą▒ą░ą▓ą╗ąĄąĮąŠ: ąÆčü čüąĄąĮ 13, 2020 22:19:47 |
|
| ąöčĆčāą│ ąÜąŠčéą░ |
|
ąÜą░čĆą╝ą░: 1
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣: 157
ąŚą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮ: ą¤ąĮ ąŠą║čé 11, 2010 19:00:08
ąĪąŠąŠą▒čēąĄąĮąĖą╣: 3328
ąĀąĄą╣čéąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖčÅ: 0
|
|
ąĀą░ąĘą▓ąĄ ą▓čŗ ąĮąĄ ą┐ąĖčłąĖč鹥 ą║ąŠą┤ ą┤ą╗čÅ čĆąŠą▒ąŠčéą░? ąśčüą┐ąŠą╗čīąĘčāąĄč鹥 ą│ąŠč鹊ą▓čŗą╣?
ąÆ ą┐ąĄčĆą▓ąŠą╝ čüą╗čāčćą░ąĄ ąĄčüą╗ąĖ ą£ąÜ ąĖą╝ąĄąĄčé ą╝ąŠą┤čāą╗čī SDIO, ą╝ąŠą┤ąĖčäąĖčåąĖčĆčāą╣č鹥 ą┤čĆą░ą╣ą▓ąĄčĆ čćč鹊ą▒čŗ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ FatFS (ąĖą╗ąĖ čćč鹊 ą▓čŗ čéą░ą╝ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥) ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖą╗ą░ ąŠą▒ą╝ąĄąĮ čü ą║ą░čĆč鹊ą╣ č湥čĆąĄąĘ SDIO.
ąÆąŠ ą▓č鹊čĆąŠą╝ čüą╗čāčćą░ąĄ, ąĮą░ą▓ąĄčĆąĮąŠ čüą╗ąŠąČąĮąŠ ą┤ąŠą▒ąĖčéčīčüčÅ čģąŠčĆąŠčłąĖčģ čĆąĄąĘčāą╗čīčéą░č鹊ą▓ ąĄčüą╗ąĖ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░ą┐ąĖčüą░čéčī ą║ąŠą┤, ąĘą░č鹊č湥ąĮąĮčŗą╣ ą┐ąŠą┤ ą║ąŠąĮą║čĆąĄčéąĮčāčÄ ąĘą░ą┤ą░čćčā (čéčĆą░čüčüčā, ą┤ą░čéčćąĖą║ąĖ ąĖ čé. ą┤.). ąŻąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčŗą╣ ąĮąĄ ą▓čüąĄą│ą┤ą░ čŹčäč乥ą║čéąĖą▓ąĮčŗą╣ ąĖ ą╝ą░ą╗ąŠą▓ąĄčĆąŠčÅčéąĮąŠ ą┐čĆąĖąĘąŠą▓ąŠąĄ ą╝ąĄčüč鹊.
|
|
| ąÆąĄčĆąĮčāčéčīčüčÅ ąĮą░ą▓ąĄčĆčģ |
|
|
|
|
ąĪčéčĆą░ąĮąĖčåą░ 8 ąĖąĘ 14
|
[ ąĪąŠąŠą▒čēąĄąĮąĖą╣: 265 ] |
... , , , , , , ... |
ąÜč鹊 čüąĄą╣čćą░čü ąĮą░ č乊čĆčāą╝ąĄ |
ąĪąĄą╣čćą░čü čŹč鹊čé č乊čĆčāą╝ ą┐čĆąŠčüą╝ą░čéčĆąĖą▓ą░čÄčé: ąĮąĄčé ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ ąĖ ą│ąŠčüčéąĖ: 11 |
|
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąĮą░čćąĖąĮą░čéčī č鹥ą╝čŗ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ąŠčéą▓ąĄčćą░čéčī ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 čāą┤ą░ą╗čÅčéčī čüą▓ąŠąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ
ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ą▓ą╗ąŠąČąĄąĮąĖčÅ
|

|
|