Страница 1 из 3
PIC12f508 Инвертирование сигналов
Добавлено: Вс окт 13, 2024 23:41:01
rusman159
Добрый вечер!
Имеется мини отладочная плата и PIC12F508
Пробую простейшие программы со светодиодами
Не могу разобраться, почему уровни 0=включено, 1= выключено.
К примеру GPIO = 0b00000011; выключает два светодиода на ногах GP0 и GP1
Кнопки тоже работают наоборот, в чем может быть проблема?
Код: Выделить всё
#include <xc.h>
// chip=PIC12F508
// CONFIG
#pragma config CP = OFF // Code protection off
#pragma config OSC = IntRC // internal RC oscillator
#pragma config MCLRE = ON // GP3/MCLR pin function is MCLR
#pragma config WDT = OFF // WDT disabled
#define _XTAL_FREQ 4000000L
//#define BUTTON GPIO0
#define LED1 GP0
#define LED2 GP1
#define KEY1 GP2
#define KEY2 GP5
void main(void)
{
GPIO = 0x00; //
OPTION = 0b11000000; // Подтяжка и пробуждение по входам отключены
TRIS = 0b11111100; // GP1,GP2 = output
GPIO = 0x00;
int flag=0;
while (1)
{
LED1=1;
LED2=0;
}
}
Тут LED1 не горит, LED2 горит
Re: PIC12f508 Инвертирование сигналов
Добавлено: Вс окт 13, 2024 23:53:18
Аlex
На схему пробовали смотреть ?
Ну, или, в крайнем случае, нам показать её

Re: PIC12f508 Инвертирование сигналов
Добавлено: Пн окт 14, 2024 00:16:03
Martian
И надо сразу отвыкать от шаблона, что 1 - синоним включено, а 0 - выключено. И то и другое - просто противоположные логические состояния. Привязывать их к уровням сигнала необходимо только со схемой, как заметил Аlex
Re: PIC12f508 Инвертирование сигналов
Добавлено: Пн окт 14, 2024 06:51:22
rusman159
Мини отладочная плата.
Кнопки подключают GND к пинам + подтяжка к +5в через резисторы 10к
На светодиоды идут +5в через резисторы, второй контакт на МК, те МК подает на них землю

Re: PIC12f508 Инвертирование сигналов
Добавлено: Пн окт 14, 2024 07:34:15
Martian
Ну вот, а землю он подаёт как раз установкой 0. Всё правильно.
Re: PIC12f508 Инвертирование сигналов
Добавлено: Пн окт 14, 2024 23:57:49
Аlex
Re: PIC12f508 Инвертирование сигналов
Добавлено: Вт окт 15, 2024 00:42:11
Martian
Ну, в первый раз же...
Re: PIC12f508 Инвертирование сигналов
Добавлено: Ср окт 16, 2024 10:11:27
rusman159
Спасибо большое!
Добавлено after 1 hour 8 minutes 43 seconds:
Еще возник вопрос, как работать с таймером TMR0 ?
Необходимо вычислить время между двумя импульсами на ноге GP0 или GP1
Как можно настроить таймер на счет времени и куда будет записываться значение?
не смог найти примеры на 12f508, но ранее с таймерами на pic не работал
Re: PIC12f508 Инвертирование сигналов
Добавлено: Ср окт 16, 2024 13:41:41
veso74
Начало деятельности именно с PIC12F508 не OK. Его ресурсы слишком ограничены. Напр. по TMR0 - нет interrupt при переполнении. Вообще нет interrupts. Вариант: на той же пробной плате замените МК на другой из серии: PIC12F675, PIC12F683, PIC12F1822, PIC12F1840 ...
Re: PIC12f508 Инвертирование сигналов
Добавлено: Ср окт 16, 2024 13:48:26
RoboC
Боюсь, что ваш контроллер аппаратно захват не сможет сделать.
Софтово, надо знать какие промежутки надо ловить и с какой точностью.
Re: PIC12f508 Инвертирование сигналов
Добавлено: Ср окт 16, 2024 14:04:38
rusman159
У меня есть устройство на чипе 12с508 ( вроде как ), но прочитать его не смогу.
насколько я понимаю, там реализация такая:
1 вход
1 выход
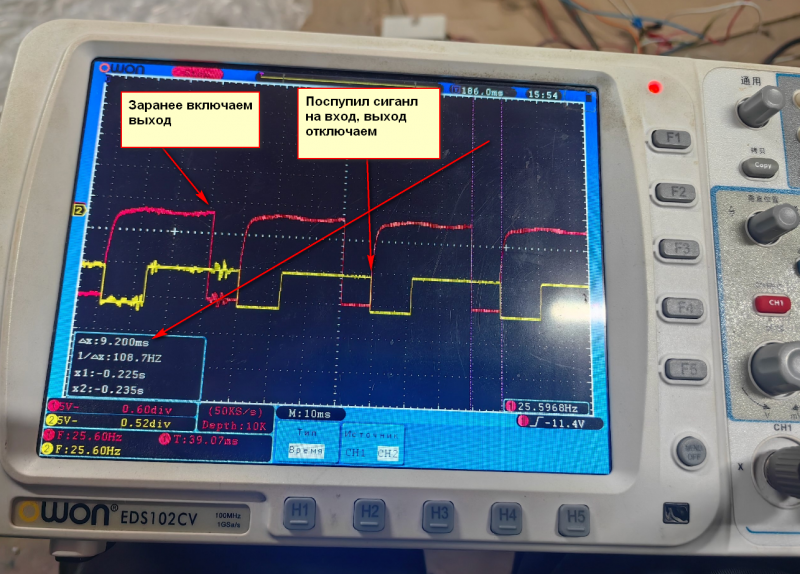
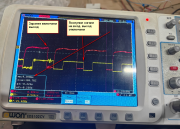
При поступлении первого и (если он единственный) импульса на вход мк включает выход на 0.7сек
Потом со 2 и далее импульса мк сокращает время включения выхода примерно до 10ms по замерам осциллографом, но самый нюанс в том, что мк должен включить выход заранее, когда импульс на вход еще не поступил.
Т.е необходимо сделать замер времени между двумя импульсами на входе и при поступлении 2, 3 и далее импульсов заранее ( за 10-15ms ) до предполагаемого импульса включаем выход, при поступлении импульса отключаем выход, делаем перерасчет времени и всё сначала.
Как мне кажется, это можно сделать только таймером, или как еще можно рассчитать время между двумя прошлыми импульсами, чтобы заранее включить выход?
Пример во вложении (нажать для увеличения)
Re: PIC12f508 Инвертирование сигналов
Добавлено: Ср окт 16, 2024 14:14:01
RoboC
По ослику он его включает по ниспадающему фронту, фиксированной длинны.

Re: PIC12f508 Инвертирование сигналов
Добавлено: Ср окт 16, 2024 14:27:00
rusman159
[uquote="RoboC",url="/forum/viewtopic.php?p=4636985#p4636985"]По ослику он его включает по ниспадающему фронту, фиксированной длинны.
[/uquote]
Да, так как для замеров на входе был сигнал около 25hz
Опытным путем ( при нажатии кнопки рукой, либо с генератора ) мк начинает подстраивать включение выхода заранее, чтобы время накопления было около 10ms ( т.е лампочка, которая подключена на выход загорается всего 10ms+- ), но включена или выключена сейчас не суть важно, главное как включить заранее)
Добавлено after 2 minutes 22 seconds:
[uquote="rusman159",url="/forum/viewtopic.php?p=4636989#p4636989"][uquote="RoboC",url="/forum/viewtopic.php?p=4636985#p4636985"]По ослику он его включает по ниспадающему фронту, фиксированной длинны.
[/uquote]
Да, так как для замеров на входе был сигнал около 25hz
Опытным путем ( при нажатии кнопки рукой, либо с генератора ) мк начинает подстраивать включение выхода заранее, чтобы время накопления было около 10ms ( т.е лампочка, которая подключена на выход загорается всего 10ms+- )[/uquote]
Если 12f508 не может посчитать время между импульсами, то кто из его братьев сможет? Например 12f629?
Но от производителя информация была именно о чипе 12c508 ( без маркировки на нем )
Re: PIC12f508 Инвертирование сигналов
Добавлено: Ср окт 16, 2024 14:37:49
RoboC
У вас грубо период 40мс . Вы постоянно считываете в цикле состояние сигнала с входа(желтый сигнал GP0, предположим) и как только он станет равным 0 GP1 =1 задержка 30 мс GP1=0(красный сигнал) и вернулись к считыванию состояния сигнала.
Re: PIC12f508 Инвертирование сигналов
Добавлено: Ср окт 16, 2024 14:42:22
rusman159
А если заранее неизвестна частота или период? Условно от 2 до 300hz, тогда опять возвращаемся к необходимости вычислить время между прошлыми импульсами.
Т.е сейчас скорость вентилятора 5hz, далее изменилась до 150hz и каждый раз нужно включать выход заранее на 10ms
Необходимо использовать таймер, ведь так?
Re: PIC12f508 Инвертирование сигналов
Добавлено: Ср окт 16, 2024 14:56:57
RoboC
Вы "ЗАРАНЕЕ" никак не узнаете при изменяющейся частоте. С таймером или без, т.к. вам неизвестно будет на сл. импульсе период больше или меньше. Скорее всего вы не правильно интенсифицируете полученные данные.
Re: PIC12f508 Инвертирование сигналов
Добавлено: Ср окт 16, 2024 15:08:58
rusman159
Если частота станет меньше, то пройдут несколько более длинных импульсов на выходе, это не критично, на следующем такте длина уже скорректируется.
Т.е мк посчитал, что период был 40ms, значит нужно включить выход через 30ms, включает выход через 30ms, но вдруг импульс поступил через 60ms, выход будет включен дольше, далее скорректируется, так как частота изменяется плавно в большую либо меньшую сторону
Могу снять осциллограмму работы при изменении частоты.
Re: PIC12f508 Инвертирование сигналов
Добавлено: Ср окт 16, 2024 16:23:36
RoboC
Т.е. абстрактно это должно работать так с максимальной длинной импульса ~255 мс?
Код: Выделить всё
time=0;
duration=0;
tik=0;
while(1)
{
if ((KEY_PULS == 1)&(tik==0)) {tik=1; time=0;}
if ((KEY_PULS == 0){tik=0;duration=time;load =1; }
delay_1ms();
if (tik) { time++;}
else
{
if (duration==0) {
load =0;}
else {
duration--;}
}
}
Re: PIC12f508 Инвертирование сигналов
Добавлено: Ср окт 16, 2024 21:19:22
rusman159
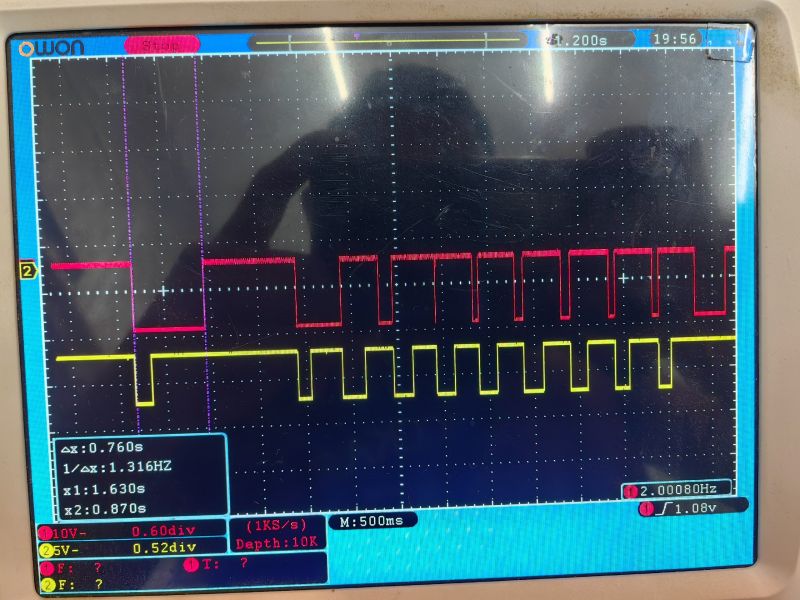
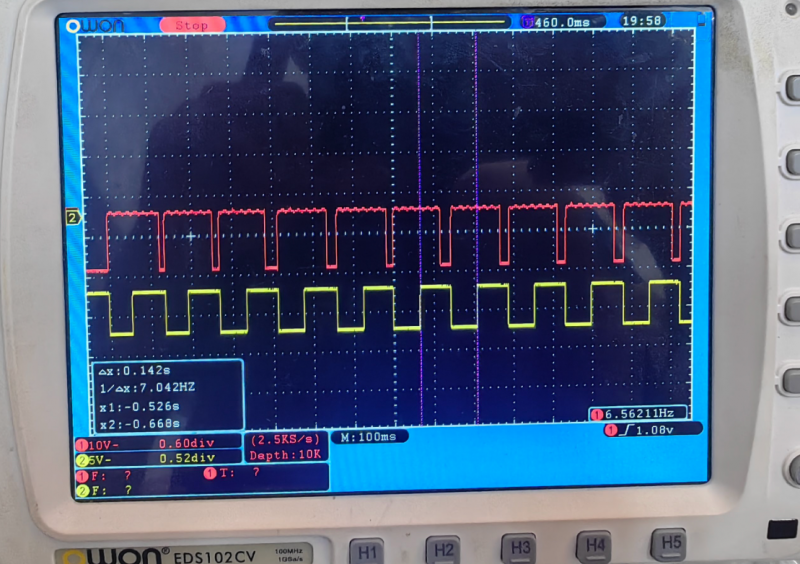
Все работает и на более низкой частоте, вот к примеру 1 и 2 картинка.
Первый импульс, после него сделал задержку, выход был включен максимальное время 760ms, далее со 2 и далее импульса начинается подстройка, тут время работы выхода не 10мс, а около 80-100ms, но оно подстраивается с повышением частоты.
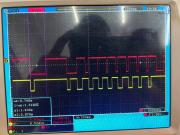
в середине частота около 1.75-2hz, всё отрабатывает корректно. ( сделаем погрешность на мою неравномерность подучи импульсов)

Далее подал импульсы ( вручную ) около 7hz, не очень равномерно, но результат работы +- стабильный.
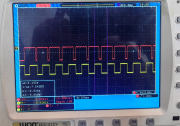
Т.е вот такую логику работы и нужно получить.
Re: PIC12f508 Инвертирование сигналов
Добавлено: Ср окт 16, 2024 22:00:10
Martian
по приходу импульса:
значение счётчика сохранить в переменную N со сдвигом вправо на 1 (делим на 2)
сбросить счётчик
инвертировать выход
запустить цикл до N
вне прихода имульса:
приращивать единичку на счётчике
по завершению цикла (N) инвертировать выход