 |
 |
|||||||||||||||||
ąĀą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝ąŠą┤ąĄą╗čīčÄ č湥čĆąĄąĘ Bluetooth LE
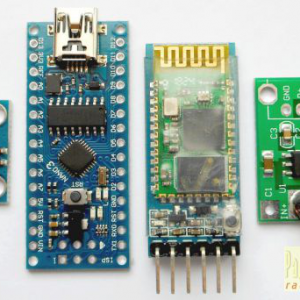
ąÉą▓č鹊čĆ: ąĪąĄčĆą│ąĄą╣ ąæąĄąĘčĆčāą║ąŠą▓ (aka Ser60) ąĖ Nathan Nelson, sergeilb60@mail.ru ąĪąĖčüč鹥ą╝ą░ ą┤ąĖčüčéą░ąĮčåąĖąŠąĮąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮą░čÅ ą▓ čüčéą░čéčīąĄ, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ąĮą░ ąĮąĄą▒ąŠą╗čīčłąĖčģ čĆą░čüčüč鹊čÅąĮąĖčÅčģ – ą│ą┤ąĄ-č鹊 ą┤ąŠ 30ą╝ ą▓ ąŠčéą║čĆčŗč鹊ą╝ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ. ą×čüąĮąŠą▓ąĮąŠąĄ ąĄčæ ą┤ąŠčüč鹊ąĖąĮčüčéą▓ąŠ – ą╝ą░ą╗ąŠąĄ č鹊ą║ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ, čćč鹊 ą▓ąŠ ą╝ąĮąŠą│ąĖčģ čüą╗čāčćą░čÅčģ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆąĄčłą░čÄčēąĖą╝ čäą░ą║č鹊čĆąŠą╝. ąÆ ą┤ą░ąĮąĮąŠą╝ čüą╗čāčćą░ąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ ą╝ąŠą┤ąĄą╗čīčÄ ą╝ą░čłąĖąĮą║ąĖ, ą▓ ą║ąŠč鹊čĆąŠą╣ ąĖą╝ąĄąĄčéčüčÅ ąŠą┤ąĖąĮ ą╝ąŠč鹊čĆ ą┤ą╗čÅ ą┤ą▓ąĖąČąĄąĮąĖčÅ ą▓ą┐ąĄčĆčæą┤-ąĮą░ąĘą░ą┤ ąĖ ąŠą┤ąĖąĮ ą╝ąŠč鹊čĆ ą┤ą╗čÅ ą┐ąŠą▓ąŠčĆąŠčéą░ ą┐ąĄčĆąĄą┤ąĮąĖčģ ą║ąŠą╗čæčü. ą£ąŠą┤ąĄą╗čī ą┤ą╗čÅ ąŠą┐čŗč鹊ą▓ ą▒čŗą╗ą░ ą┐čĆąĖąŠą▒čĆąĄč鹥ąĮą░ ą▓ ą╝ąĄčüčéąĮąŠą╝ ą╝ąŠą╗ą╗ąĄ čāąČąĄ čüąŠą▒čĆą░ąĮąĮąŠą╣ ąĖ ąĖąĘąĮą░čćą░ą╗čīąĮąŠ ąŠčüąĮą░čēčæąĮąĮąŠą╣ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝ąŠą╣ čĆą░ą┤ąĖąŠčāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĮą░ čćą░čüč鹊č鹥 27 ą╝ą│čå. ą×ą▒ą░ ą╝ąŠč鹊čĆą░ ą╝ąŠą┤ąĄą╗ąĖ ąĮąŠčĆą╝ąĖčĆąŠą▓ą░ąĮčŗ ąĮą░ čĆą░ą▒ąŠč湥ąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ 3ąÆ ąĖ ą▓ ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮąŠą╝ ąĖčüą┐ąŠą╗ąĮąĄąĮąĖąĖ ą┐ąĖčéą░ą╗ąĖčüčī ąŠčé ąŠą┤ąĮąŠą│ąŠ ą╗ąĖčéąĖąĄą▓ąŠą│ąŠ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ 3.6ąÆ. ąĪą░ą╝ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖą╗ąŠčüčī ą┤ąČąŠą╣čüčéąĖą║ą░ą╝ąĖ ą▓ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ąĄ ą▒ąĄąĘ čĆąĄą│čāą╗ąĖčĆąŠą▓ą║ąĖ čüą║ąŠčĆąŠčüčéąĖ ą┤ą▓ąĖąČąĄąĮąĖčÅ. ąØą░čłąĄą╣ čåąĄą╗čīčÄ ą▒čŗą╗ąŠ ą┐ąĄčĆąĄą┤ąĄą╗ą░čéčī ą╝ąŠą┤ąĄą╗čī ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĄčæ čéčĆą░ąĄą║č鹊čĆąĖąĄą╣ ąĖ čüą║ąŠčĆąŠčüčéčīčÄ ą┐čāčéčæą╝ ąĮą░ą║ą╗ąŠąĮą░ ą┐ą╗ą░čéčŗ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░, ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą║ąŠč鹊čĆąŠą╣ ą▓ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ ąŠčéčüą╗ąĄąČąĖą▓ą░ą╗ąŠčüčī-ą▒čŗ čü ą┐ąŠą╝ąŠčēčīčÄ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆą░. ąÆ čüąĄčéąĖ ąĖąĘą▓ąĄčüčéąĮčŗ ą┐čĆąĖą╝ąĄčĆčŗ ą┐čĆąŠąĄą║č鹊ą▓ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüą╝ą░čĆčéč乊ąĮą░ ą┤ą╗čÅ ą┐ąŠą┤ąŠą▒ąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, čéą░ą║ąŠą╣ ą┐čĆąŠąĄą║čé ąĖą╝ąĄąĄčéčüčÅ ąĖ čā ąĮą░čü. ą×ą┤ąĮą░ą║ąŠ ąĮą░ čŹč鹊čé čĆą░ąĘ ąĮą░ą╝ čģąŠč鹥ą╗ąŠčüčī čüą┤ąĄą╗ą░čéčī čćč鹊-č鹊 ąŠčēčāčéąĖą╝ąŠ ą╝ąĄąĮąĄąĄ 菹ĮąĄčĆą│ąŠ-ą┐ąŠčéčĆąĄą▒čÅčÄčēąĄąĄ ąĮą░ ą┐ąĄčĆąĄą┤ą░čÄčēąĄą╣ čüč鹊čĆąŠąĮąĄ. ąŁč鹊 ą▒čŗą╗ ą┐ąĄčĆą▓čŗą╣ ąŠą▒čāčćą░čÄčēąĖą╣ BLE ą┐čĆąŠąĄą║čé ą╝ąŠąĄą│ąŠ čüčéčāą┤ąĄąĮčéą░ ąØ菹╣čüąĄąĮą░. ą×ą│čĆą░ąĮąĖč湥ąĮąĖąĄ ąĮą░ čĆą░ą┤ąĖčāčü ą┤ąĄą╣čüčéą▓ąĖčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüą▓čÅąĘą░ąĮąŠ ą┐čĆąĄąČą┤ąĄ ą▓čüąĄą│ąŠ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┐čĆąŠč鹊ą║ąŠą╗ą░ BLE (Bluetooth Low Energy), ą║ąŠč鹊čĆčŗą╣ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąĄąĮąĮąŠ ą┤ą╗čÅ ąĮąĄą▒ąŠą╗čīčłąĖčģ čĆą░čüčüč鹊čÅąĮąĖą╣. ąØą░ą╝ąĖ ą▒čŗą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮčŗ čĆą░ą┤ąĖąŠą╝ąŠą┤čāą╗ąĖ čüąĄą╝ąĄą╣čüčéą▓ą░ EZ-BLE čäąĖčĆą╝čŗ Cypress čü ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ ą▓čŗčģąŠą┤ąĮąŠą╣ ą╝ąŠčēąĮąŠčüčéčīčÄ +3dBm (2mW). ąŁčéąĖ ą╝ąŠą┤čāą╗ąĖ ąŠč湥ąĮčī ą┐čĆąŠčüčéčŗ ąĖ čāą┤ąŠą▒ąĮčŗ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĖ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ čüąĖčüč鹥ą╝čŗ PSoC Creator. ą¤čĆąŠ ą┐ąŠą┤ąŠą▒ąĮčŗąĄ ą╝ąŠą┤čāą╗ąĖ čā ą╝ąĄąĮčÅ ąĄčüčéčī ą┐ą░čĆą░ čüčéą░č鹥ą╣, čüą╝. [1] ąĖ čüčüčŗą╗ą║ąĖ ą▓ ąĮąĄą╣. ą¤čĆąĖą╝ąĄąĮčæąĮąĮčŗąĄ ą▓ ąĮą░čłąĄą╝ ą┐čĆąŠąĄą║č鹥 ą╝ąŠą┤čāą╗ąĖ ą▓ąĄčüčīą╝ą░ ą┐čĆąŠčüč鹊 ą┐ą░čÅčÄčéčüčÅ ą╗čÄą▒čŗą╝ ą┐ą░čÅą╗čīąĮąĖą║ąŠą╝ ąĮą░ ą┐ą╗ą░čéčā ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ ą▒ąŠą╗čīčłąŠą╝čā čłą░ą│čā ą▓čŗą▓ąŠą┤ąŠą▓ (1.5ą╝ą╝) ąĖ ąĮą░ą╗ąĖčćąĖčÄ ą║ąŠąĮčéą░ą║čéąĮčŗčģ ą┐ą╗ąŠčēą░ą┤ąŠą║ ąĮą░ čĆčæą▒čĆą░čģ ąĖčģ ą┐ą╗ą░čé. ąöą░ąĮąĮą░čÅ ą╝ąŠą┤ąĄą╗čī ą╝ąŠą┤čāą╗ąĄą╣ ą▓čŗą┐čāčüą║ą░ąĄčéčüčÅ ą▓ ą┤ą▓čāčģ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖčÅčģ – čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ąĮą░ ą┐ą╗ą░č鹥 菹║čĆą░ąĮąŠą╝ ąĖ ą▒ąĄąĘ ąĮąĄą│ąŠ. ą×čéą╗ąĖčćąĖąĄ čŹčéąĖčģ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖą╣ ą│ą╗ą░ą▓ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ą▓ ąĮą░ą╗ąĖčćąĖąĖąĖ čüąĄčĆčéąĖčäąĖą║ą░čåąĖąĖ ąĖ ą▓ čåąĄąĮąĄ. ą£čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖ ą▒ąŠą╗ąĄąĄ ą┤ąĄčłčæą▓čŗąĄ ąĖ ąĮąĄčüąĄčĆčéąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą╝ąŠą┤čāą╗ąĖ ą▒ąĄąĘ 菹║čĆą░ąĮąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą▓ą┐ąŠą╗ąĮąĄ ą┐čĆąĖą│ąŠą┤ąĮčŗ ą┤ą╗čÅ ą┤ąŠą╝ą░čłąĮąĖčģ ą┐ąŠą┤ąĄą╗ąŠą║. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą╝ąŠą┤čāą╗ąĄą╣ ąŠčüąĮą░čēčæąĮ ą▓čüąĄą╣ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ ą┐ąĄčĆąĖč乥čĆąĖąĄą╣, čéąĖą┐ąĖčćąĮąŠą╣ ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ čüąĄą│ąŠą┤ąĮčÅ, čéą░ą║ čćč鹊 ą▓čüčÅ čüąĖčüč鹥ą╝ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī čüąŠą▒čĆą░ąĮą░ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąŠą┤ąĮąŠą│ąŠ ą╗ąĖčłčī ą╝ąŠą┤čāą╗čÅ. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓čŗą┐ąŠą╗ąĮąĄąĮ ą┐ąŠ ą░čĆčģąĖč鹥ą║čéčāčĆąĄ ARM Cortex-M0 čü ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čćą░čüč鹊č鹊ą╣ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ 48 ą╝ą│čå ąŠčé ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░. ąØą░ ą┐ą╗ą░č鹥 ą╝ąŠą┤čāą╗čÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą║ą▓ą░čĆčå ąĮą░ čćą░čüč鹊čéčā 24 ą╝ą│čå ą┤ą╗čÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čĆą░ą┤ąĖąŠ-čéčĆą░ą║čéą░, ą░ čéą░ą║ąČąĄ čćą░čüąŠą▓ąŠą╣ ą║ą▓ą░čĆčå ą┤ą╗čÅ ą┐čĆąĄčåąĄąĘąĖąŠąĮąĮąŠą│ąŠ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĮčŗčģ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą┐čĆąĖ čĆą░ą▒ąŠč鹥 čüč鹥ą║ą░ ą┐čĆąŠč鹊ą║ąŠą╗ą░. ąÆ čåąĄą╗čÅčģ čüąĮąĖąČąĄąĮąĖčÅ č鹊ą║ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą╝čŗ čéą░ą║čéąĖčĆčāąĄą╝ ąĮąĖąČąĮąĖąĄ čāčĆąŠą▓ąĮąĖ čüč鹥ą║ą░ BLE ąĮą░ čćą░čüč鹊č鹥 3 ą╝ą│čå ąŠčé ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░, ą░ ą▓čüčæ ąŠčüčéą░ą╗čīąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĮą░ čćą░čüč鹊č鹥 6 ą╝ą│čå. ą¤čĆąĖčæą╝ąĮąĖą║ ąĪčģąĄą╝ą░ ą┐čĆąĖčæą╝ąĮąĖą║ą░ čćčĆąĄąĘą▓čŗčćą░ą╣ąĮąŠ ą┐čĆąŠčüčéą░. ą¤ąŠą╝ąĖą╝ąŠ čĆą░ą┤ąĖąŠ-ą╝ąŠą┤čāą╗čÅ IC1 ąŠąĮą░ ą▓ą║ą╗čÄčćą░ąĄčé čĆą░ąĘčŖčæą╝ ą┤ą╗čÅ ąĄą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ, ą┤čĆą░ą╣ą▓ąĄčĆ ą╝ąŠč鹊čĆąŠą▓ ąĮą░ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ IC2, čüą▓ąĄč鹊ą┤ąĖąŠą┤ ą┤ą╗čÅ ąĖąĮą┤ąĖą║ą░čåąĖąĖ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (čüą╝. ąĮąĖąČąĄ) ąĖ čüčéą░ą▒ąĖą╗ąĖąĘą░č鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ IC3. ąöą╗čÅ ą┐ąĖčéą░ąĮąĖčÅ čüčģąĄą╝čŗ čĆąĄčłąĄąĮąŠ ą▒čŗą╗ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī 4 ą┐ą░ą╗čīčćąĖą║ąŠą▓čŗąĄ ą▒ą░čéą░čĆąĄąĖ čéąĖą┐ąŠčĆą░ąĘą╝ąĄčĆą░ ąÉąÉ, čéą░ą║ čćč鹊 ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĮą░ ąĮąĖčģ ąĮąĄ ąŠą┐čāčüą║ą░ąĄčéčüčÅ ąĮąĖąČąĄ 4ąÆ ą┐čĆąĖ čĆą░ąĘčĆčÅą┤ą║ąĄ ą▓ ą┐čĆąŠčåąĄčüčüąĄ čĆą░ą▒ąŠčéčŗ čüąĖčüč鹥ą╝čŗ. ą¤čĆąĖą╝ąĄąĮčæąĮąĮčŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ IC2 ąĖą┤ąĄą░ą╗čīąĮąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĮąĄą▒ąŠą╗čīčłąĖą╝ąĖ ą╝ąŠč鹊čĆą░ą╝ąĖ čü ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ ą┤ąŠ 1ąÉ. ą×ąĮ ą▓čŗą┐ąŠą╗ąĮąĄąĮ ą┐ąŠ ąÜą£ą×ą¤ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ čü ą╝ą░ą╗čŗą╝ ą┐ą░ą┤ąĄąĮąĖąĄą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮą░ čéčĆą░ąĮąĘąĖčüč鹊čĆą░čģ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą║ą░čüą║ą░ą┤ą░, čćč鹊 ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčé ąĮą░ą│čĆąĄą▓ ą║ąŠčĆą┐čāčüą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┤ą░ąČąĄ ą┐čĆąĖ čĆą░ą▒ąŠč鹥 čü ą╝ą░ą║čüąĖą╝ą░ą╗čīą╝čŗą╝ č鹊ą║ąŠą╝. ąØą░ą╝ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮ ą▓ą░čĆąĖą░ąĮčé ą┤čĆą░ą╣ą▓ąĄčĆą░ ą▓ ą║ąŠčĆą┐čāčüąĄ čü ą╝ąĄčéą░ą╗ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą┐ąŠą┤ą╗ąŠąČą║ąŠą╣, ą║ąŠč鹊čĆą░čÅ ą┐ąŠčüą╗ąĄ ą┐čĆąĖą┐ą░ąĖą▓ą░ąĮąĖčÅ ą║ ą┐ą╗ą░č鹥 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī č乊ą╗čīą│čā ąĮą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ą▓ ą║ą░č湥čüčéą▓ąĄ č鹥ą┐ą╗ąŠąŠčéą▓ąŠą┤ą░. ą×ą┤ąĮą░ą║ąŠ, čŹčéą░ ą╝ąĄčĆą░ ą┐čĆąĄą┤ąŠčüč鹊čĆąŠąČąĮąŠčüčéąĖ ą┤ą╗čÅ čéčĆčæčģ-ą▓ąŠą╗čīč鹊ą▓čŗčģ ą╝ąŠč鹊čĆąŠą▓ ą╝ąŠą┤ąĄą╗ąĖ ąŠą║ą░ąĘą░ą╗ą░čüčī čüąŠą▓ąĄčĆčłąĄąĮąĮąŠ ąĖąĘą╗ąĖčłąĮąĄą╣ ąĖ ą┐ąŠą┤ą╗ąŠąČą║čā ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ-ą▒čŗ ą▓ąŠąŠą▒čēąĄ ąĮąĄ ą┐čĆąĖą┐ą░ąĖą▓ą░čéčī ą║ ą┐ą╗ą░č鹥, ąĖą╗ąĖ ą┤ą░ąČąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ą░čĆąĖą░ąĮčé ą║ąŠčĆą┐čāčüą░ ą▒ąĄąĘ ą┐ąŠą┤ą╗ąŠąČą║ąĖ. ą¦ąĄčéčŗčĆąĄ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖčģ čüąĖą│ąĮą░ą╗ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ čĆą░ąĘą▒ąĖčéčŗ ąĮą░ 2 ą┐ą░čĆčŗ. ąÆ ą║ą░ąČą┤ąŠą╣ ą┐ą░čĆąĄ ąŠą┤ąĖąĮ ąĖąĘ čüąĖą│ąĮą░ą╗ąŠą▓ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤ą░čćąĖ ąĖąĘ ą╝ąŠą┤čāą╗čÅ ą©ąśą£ ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą╝ąŠč鹊čĆ, ą░ ą▓č鹊čĆąŠą╣ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ąĄą│ąŠ ą▓čĆą░čēąĄąĮąĖčÅ. ą©ąśą£ ą┤ą╗čÅ ą╝ąŠč鹊čĆą░ ą┐ąŠą▓ąŠčĆąŠčéą░ ą║ąŠą╗čæčü ą┐čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ą╗ąŠčüčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ čüąĮąĖąČąĄąĮąĖčÅ čŹčäč乥ą║čéąĖą▓ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮą░ ąĮčæą╝. ąÆąĮčāčéčĆąĖ PSoC ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮčŗ 3 ą╝ąŠą┤čāą╗čÅ. ą£ąŠą┤čāą╗čī PWM č乊čĆą╝ąĖčĆčāąĄčé ą©ąśą£ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą╝ąŠč鹊čĆą░ą╝ąĖ. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 菹║čüą┐ąĄčĆąĖą╝ąĄąĮč鹊ą▓ ą▒čŗą╗ą░ ą▓čŗą▒čĆą░ąĮą░ čćą░čüč鹊čéą░ ą©ąśą£ ą▓ 2 ą╝ą│čå / 127 = 15.7 ą║ą│čå ą┐čĆąĖ 7-ą▒ąĖčéąĮąŠą╝ čĆą░ąĘčĆąĄčłąĄąĮąĖąĖ. ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓čŗą▒čĆą░ąĮąŠ ąĖąĘ čüąŠąŠą▒čĆą░ąČąĄąĮąĖą╣ ą┐ąŠčüčŗą╗ą║ąĖ ą╗ąĖčłčī ąŠą┤ąĮąŠą│ąŠ ą▒ą░ą╣čéą░ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüą║ąŠčĆąŠčüčéčīčÄ, ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą║ąŠč鹊čĆąŠą│ąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą┤ą▓ąĖąČąĄąĮąĖčÄ ą╝ąŠą┤ąĄą╗ąĖ ą▓ą┐ąĄčĆčæą┤, ą░ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠąĄ – ąĮą░ąĘą░ą┤. ą¤čĆąĖ čŹč鹊ą╝ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą╗ąĖčłčī 3 čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮčŗąĄ čüą║ąŠčĆąŠčüčéąĖ: ą╝ą░ą╗ą░čÅ, čüčĆąĄą┤ąĮčÅčÅ, ąĖ ą▒ąŠą╗čīčłą░čÅ. ąÜą░ą║ ąŠą║ą░ąĘą░ą╗ąŠčüčī, ą▓ ą╝ąŠą┤ąĄą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮą░ ą┤ąĄčłčæą▓ą░čÅ ą║ąŠčĆąŠą▒ą║ą░ ą┐ąĄčĆąĄą┤ą░čć čü ą┐ą╗ą░čüčéąĖą║ąŠą▓čŗą╝ąĖ čłąĄčüč鹥čĆčæąĮą║ą░ą╝ąĖ ą▒ąĄąĘ ąĮąŠčĆą╝ą░ą╗čīąĮčŗčģ ą┐ąŠą┤čłąĖą┐ąĮąĖą║ąŠą▓ ąĖ čü ąŠą│čĆąŠą╝ąĮčŗą╝ąĖ ą┐ąŠč鹥čĆčÅą╝ąĖ, ą░ čéą░ą║ąČąĄ ą▓ąĄčüčīą╝ą░ ąĮąĄčŹčäč乥ą║čéąĖą▓ąĮčŗąĄ ą╝ąŠč鹊čĆčŗ. ąśąĘ-ąĘą░ čāą▓ąĄą╗ąĖč湥ąĮąĮąŠą│ąŠ č湥čéčŗčĆčīą╝čÅ ą▒ą░čéą░čĆąĄčÅą╝ąĖ ą▓ąĄčüą░ ą╝ąŠą┤ąĄą╗ąĖ ą┐čĆąĖ ąŠč湥ąĮčī ą╝ą░ą╗ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą▓čĆą░čēąĄąĮąĖčÅ ą║ąŠą╗čæčü ą▓ ą▓ąŠąĘą┤čāčģąĄ ąŠąĮą░ ąĮąĄ ą╝ąŠą│ą╗ą░ čéčĆąŠąĮčāčéčīčüčÅ čü ą╝ąĄčüčéą░ ą┐ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĮą░ ą┐ąŠą╗. ą¤ąŠčŹč鹊ą╝čā ąĖ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 čĆąĄčłąĄąĮąĖąĄ ąĮą░čüčćčæčé čéčĆčæčģ ą┤ąĖčüą║čĆąĄčéąĮčŗčģ čüą║ąŠčĆąŠčüč鹥ą╣, čéą░ą║ čćč鹊 ą┤ą░ąČąĄ ąĮą░ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą╝ąŠč鹊čĆčŗ čĆą░ąĘą▓ąĖą▓ą░čÄčé ą┤ąŠčüčéą░č鹊čćąĮčŗą╣ ą╝ąŠą╝ąĄąĮčé ą┤ą╗čÅ ąĮą░čćą░ą╗čīąĮąŠą│ąŠ čüčéą░čĆčéą░ ą╝ąŠą┤ąĄą╗ąĖ. ąÆąŠčé ą║ą░ą║ ą▓čŗą│ą╗čÅą┤ąĖčé čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą╝ąŠą┤čāą╗ąĄą╣ PSoC ą▓ ą│čĆą░čäąĖč湥čüą║ąŠą╝ ą║ąŠąĮčäąĖą│čāčĆą░č鹊čĆąĄ čĆąĄčüčāčĆčüąŠą▓. ąÆčŗą▓ąŠą┤čŗ A1 ąĖ B2 ą┤ą╗čÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čĆą░čēąĄąĮąĖčÅ ą╝ąŠč鹊čĆąŠą▓ čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ąĖąĘ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ąØąĖąČąĮąĖą╣ ąĮą░ čüčģąĄą╝ąĄ ą╝ąŠą┤čāą╗čī ą©ąśą£ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čćą░čüč鹊č鹊ą╣ ą╝ąĖą│ą░ąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░. ąĪą▓ąĄč鹊ą┤ąĖąŠą┤ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗čüčÅ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąĄąĮąĮąŠ ą▓ čĆąĄąČąĖą╝ąĄ ąŠčéą╗ą░ą┤ą║ąĖ ą┤ą╗čÅ ąĖąĮą┤ąĖą║ą░čåąĖąĖ čĆą░ąĘą╗ąĖčćąĮčŗčģ čäą░ąĘ čāčüčéą░ąĮąŠą▓ą║ąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čü ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ąŠą╝ ą┐čāčéčæą╝ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čćą░čüč鹊čéčŗ ąĄą│ąŠ ą╝ąĖą│ą░ąĮąĖčÅ. ą¤čĆąĖ čŹč鹊ą╝ ą┐ąŠčüč鹊čÅąĮąĮąŠąĄ ąĄą│ąŠ čüą▓ąĄč湥ąĮąĖąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čāčüą┐ąĄčłąĮąŠą╝čā ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÄ ą┐čĆąŠčåąĄčüčüą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ. ą×ą┤ąĮą░ą║ąŠ, ą▓ ą║ąŠąĮąĄčćąĮąŠą╝ ą▓ą░čĆąĖą░ąĮč鹥 čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ ą┤ąŠą╗ąĖ čüąĄą║čāąĮą┤čŗ ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░, čéą░ą║ čćč鹊 čüą▓ąĄč鹊ą┤ąĖąŠą┤ ą┐čĆą░ą║čéąĖč湥čüą║ąĖ čüčĆą░ąĘčā ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą║ ą┐ąŠčüč鹊čÅąĮąĮąŠą╝čā čüą▓ąĄč湥ąĮąĖčÄ. ąĪąĄčĆą┤čåąĄą╝ ą┐čĆąĖčæą╝ąĮąĖą║ą░ čÅą▓ą╗čÅąĄčéčüčÅ ą╝ąŠą┤čāą╗čī BLE ą▓ PSoC. ą×ąĮ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ GAP čĆąŠą╗čī ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ čü čĆąĄą░ą╗ąĖąĘą░čåąĖąĄą╣ ą┐čĆąŠą┐čĆąĖąĄčéą░čĆąĮąŠą│ąŠ GATT ą┐čĆąŠčäąĖą╗čÅ (custom profile), ąĖ ą▓čŗčüčéčāą┐ą░ąĄčé ą▓ čĆąŠą╗ąĖ čüąĄčĆą▓ąĄčĆą░. ąÆ ą┐čĆąŠčäąĖą╗ąĄ ą┐ąŠą╝ąĖą╝ąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ čüąĄčĆą▓ąĖčüąŠą▓ Generic Access ąĖ Generic Attribute, čĆąĄą│ą╗ą░ą╝ąĄąĮčéąĖčĆčāąĄą╝čŗčģ BLE SIG, ąĖą╝ąĄąĄčéčüčÅ ąĖ ą┐čĆąŠą┐čĆąĖąĄčéą░čĆąĮčŗą╣ čüąĄčĆą▓ąĖčü Car Control, ą▓ą║ą╗čÄčćą░čÄčēąĖą╣ 3 čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ Turn, Speed, ąĖ Control ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠą▓ąŠčĆąŠčéą░ą╝ąĖ ąĖ čüą║ąŠčĆąŠčüčéčīčÄ ą╝ąŠą┤ąĄą╗ąĖ. ąĪą╗ąĄą┤čāąĄčé ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ąĮą░čł ą┐čĆąŠąĄą║čé ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé ąŠą┐čāą▒ą╗ąĖą║ąŠą▓ą░ąĮąĮąŠą│ąŠ ą▓ [2], ą│ą┤ąĄ GAP čĆąŠą╗ąĖ ą┐čĆąĖčæą╝ąĮąĖą║ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮčŗ ąĮą░čłąĖą╝. ąŁč鹊 čüą┤ąĄą╗ą░ąĮąŠ ąĮą░ą╝ąĄčĆąĄąĮąĮąŠ, čćč鹊ą▒čŗ Nathan ą│ą╗čāą▒ąČąĄ ą┐čĆąŠąĮąĖą║čüčÅ ą╝ąĖčĆąŠą╝ BLE. ąĪąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ, ąĘą░ąĮąŠą▓ąŠ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ ą╗ąŠą│ąĖą║ą░ čĆą░ą▒ąŠčéčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ ą┐čĆąĖčæą╝ąĮąĖą║ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ ąĖ ą╗ąŠą│ąĖą║ą░ ąĖčģ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖčÅ čüąŠ čüč鹥ą║ąŠą╝ BLE. ą¤čĆąĖčæą╝ ą║ąŠą╝ą░ąĮą┤ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░, ąĖą╝ąĄąĮąĮąŠ ąĘą░ą┐ąĖčüąĖ ąĮąŠą▓čŗčģ ąĘąĮą░č湥ąĮąĖą╣ ą▓ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą┐čĆąŠčäąĖą╗čÅ, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čüč鹥ą║ą░ BLE ą▓ ąŠą▒čĆą░ą▒ąŠčćąĖą║ąĄ GeneralEventHandler. ą¤čĆąĖ čŹč鹊ą╝ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ 4 čüąŠą▒čŗčéąĖčÅ. ąĪąŠą▒čŗčéąĖąĄ CYBLE_EVT_STACK_ON ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čüč鹥ą║ą░ ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĮą░čćą░ą╗ą░ ą┐ąŠčüčŗą╗ą║ąĖ advetisement čü ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ ą┐čĆąĖčæą╝ąĮąĖą║ą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╝ ą┤ą╗čÅ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ąĄą│ąŠ čü ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ąŠą╝. ąÆ ą║ą░č湥čüčéą▓ąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čāąĮąĖą║ą░ą╗čīąĮčŗą╣ 48-ą▒ąĖčéąĮčŗą╣ ą║ąŠą┤, ąĘą░čłąĖčéčŗą╣ ą▓ ą╝ąŠą┤čāą╗čī ąĮą░ čäą░ą▒čĆąĖą║ąĄ. ąĢą│ąŠ ą╝ąŠąČąĮąŠ ąĖąĘą╝ąĄąĮąĖčéčī ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ, ąĮąŠ ą╝čŗ čŹč鹊 ąĮąĄ ą┤ąĄą╗ą░ą╗ąĖ. ąĪą╗ąĄą┤čāčÄčēąĖąĄ 2 čüąŠą▒čŗčéąĖčÅ CYBLE_EVT_GAP_DEVICE_CONNECTED ąĖ CYBLE_EVT_GAP_DEVICE_DISCONNECTED ą│ąĄąĮąĄčĆąĖčĆčāčÄčéčüčÅ čüč鹥ą║ąŠą╝ ą┐ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čü ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ąŠą╝ ąĖ ą┐čĆąĖ čĆą░ąĘčŖąĄą┤ąĖąĮąĄąĮąĖąĖ čü ąĮąĖą╝. ąÆ ą┐ąĄčĆą▓ąŠą╝ čüą╗čāčćą░ąĄ ą╝čŗ ą┐čĆąŠčüč鹊 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝ čüą▓ąĄč鹊ą┤ąĖąŠą┤ ąĮą░ ą┐ąŠčüč鹊čÅąĮąĮąŠąĄ čüą▓ąĄč湥ąĮąĖąĄ, ą░ ą▓ąŠ ą▓č鹊čĆąŠą╝ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ ą╝ąŠą┤ąĄą╗čī ąĖ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗čÅąĄą╝ ą┐ąŠčüčŗą╗ą║čā advetisement, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÅ č鹥ą╝ čüą░ą╝čŗą╝ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║čā ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ. ąĪą▓ąĄč鹊ą┤ąĖąŠą┤ ą┐čĆąĖ ąŠčéčüčāčéčüčéą▓ąĖąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čü ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ąŠą╝ ąĮą░čćąĖąĮą░ąĄčé ą╝ąĖą│ą░čéčī čü ą┐ąĄčĆąĖąŠą┤ąŠą╝ 1 čüąĄą║. ąØą░ą║ąŠąĮąĄčå, ą│ą╗ą░ą▓ąĮąŠąĄ ą┤ą╗čÅ ą╗ąŠą│ąĖą║ąĖ čĆą░ą▒ąŠčéčŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čüąŠą▒čŗčéąĖąĄ CYBLE_EVT_GATTS_WRITE_REQ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ čüč鹥ą║ąŠą╝ ą┐čĆąĖ ą┐čĆąĖčæą╝ąĄ ą║ąŠą╝ą░ąĮą┤čŗ ąĘą░ą┐ąĖčüąĖ ąĘąĮą░č湥ąĮąĖčÅ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą▓ ą▒ą░ąĘčā ą┤ą░ąĮąĮčŗčģ čüąĄčĆą▓ąĄčĆą░. ą¤čĆąĖ čŹč鹊ą╝ ą╝čŗ ą┐čĆąŠą▓ąĄčĆčÅąĄą╝ ą║ą░ą║čāčÄ ąĖą╝ąĄąĮąĮąŠ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║čā čüą╗ąĄą┤čāąĄčé ąĖąĘą╝ąĄąĮąĖčéčī, ą┐ąŠčüčŗą╗ą░ąĄą╝ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ą┐čĆąĖčæą╝ą░ ą║ąŠą╝ą░ąĮą┤čŗ ą▓ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║, ąĖ ą▓čŗąĘčŗą▓ą░ąĄą╝ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ čäčāąĮą║čåąĖčÄ Set_Turn() ąĖ/ąĖą╗ąĖ Set_Speed() ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤čŗ ą┐čāčéčæą╝ ą╝ą░ąĮąĖą┐čāą╗čÅčåąĖąĖ čüąĖą│ąĮą░ą╗ąŠą▓ ąĮą░ ą▓čģąŠą┤ą░čģ IC2. ąÆ ą┤ą░ąĮąĮąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą▓čÅąĘąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čü ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ąŠą╝ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą║ą░ąČą┤čŗąĄ 100 ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤. ąÆ ą┐čĆąŠą╝ąĄąČčāčéą║ą░čģ ą╝ąĄąČą┤čā čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅą╝ąĖ čüąĖčüč鹥ą╝ą░ ą┐ąŠą│čĆčāąČą░ąĄčéčüčÅ ą▓ čüąŠąĮ čü ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ 4.7 ą╝ąÉ ą┐čĆąĖ ąĮąĄčĆą░ą▒ąŠčéą░čÄčēąĖčģ ą╝ąŠč鹊čĆą░čģ. ąśąĘ čŹč鹊ą│ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ąŠą║ąŠą╗ąŠ 1.3 ą╝ąÉ ą┐čĆąĖčģąŠą┤ąĖčéčüčÅ ąĮą░ čüą▓ąĄč鹊ą┤ąĖąŠą┤. ąśąĘ-ąĘą░ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą┐ąŠčüč鹊čÅąĮąĮąŠą╣ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą©ąśą£ ą┤ą╗čÅ ą╝ąŠč鹊čĆąŠą▓ ąĮąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▓ąŠąĘą╝ąŠąČąĮčŗą╝ ą┐ąŠą│čĆčāąĘąĖčéčī PSoC ą▓ ą│ą╗čāą▒ąŠą║ąĖą╣ čüąŠąĮ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┤ą▓ąĖąČąĄąĮąĖčÅ ą╝ąŠą┤ąĄą╗ąĖ, čé.ą║. ą┐čĆąĖ čŹč鹊ą╝ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą▓čüąĄ ą│ąĄąĮąĄčĆą░č鹊čĆčŗ ąĖ ą┐čĆąĄą║čĆą░čēą░ąĄčéčüčÅ čĆą░ą▒ąŠčéą░ ą©ąśą£. ą¤ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ą╝ąŠąČąĮąŠ čüąĮąĖąĘąĖčéčī ą┐čĆąĖą╝ąĄčĆąĮąŠ ą▓ 3 čĆą░ąĘą░ ąĄčüą╗ąĖ ąŠčéą║ą╗čÄčćą░čéčī ą│ąĄąĮąĄčĆą░čåąĖčÄ ą©ąśą£ ą┐čĆąĖ ąŠčüčéą░ąĮąŠą▓ą║ąĄ ą╝ąŠą┤ąĄą╗ąĖ ąĖ ą┐ąŠą│čĆčāąČą░čéčī čüąĖčüč鹥ą╝čā ą▓ ą│ą╗čāą▒ąŠą╣ čüąŠąĮ. ą¤čĆąĖčæą╝ąĮąĖą║ čüąŠą▒čĆą░ąĮ ąĮą░ ąŠą┤ąĮąŠčüč鹊čĆąŠąĮąĮąĄą╣ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░č鹥 čĆą░ąĘą╝ąĄčĆąŠą╝ 37×26 ą╝ą╝, ą┐čĆąĖą║ą╗ąĄąĄąĮąĮąŠą╣ ąĮą░ ąŠčéčĆąĄąĘąŠą║ ą┐ą╗ą░čüčéąĖą║ąŠą▓ąŠą╣ čāą┐ą░ą║ąŠą▓ą║ąĖ, ą║ąŠč鹊čĆčŗą╣ ą▓ čüą▓ąŠčÄ ąŠč湥čĆąĄą┤čī ą┐čĆąĖą║ą╗ąĄąĄąĮ ą║ čłą░čüčüąĖ ą╝ąŠą┤ąĄą╗ąĖ. ąæą░čéą░čĆąĄą╣ąĮčŗą╣ ąŠčéčüąĄą║ čĆą░ąĘą╝ąĄčēčæąĮ ą▓ čåąĄąĮčéčĆą░ą╗čīąĮąŠą╣ čćą░čüčéąĖ ą╝ąŠą┤ąĄą╗ąĖ. ąØąĄčüą╝ąŠčéčĆčÅ ąĮą░ čäąĖą║čüą░čåąĖčÄ ą▒ą░čéą░čĆąĄą╣ ą║čĆčŗčłą║ąŠą╣ ą║ąŠčĆą┐čāčüą░ ąŠčéčüąĄą║ą░, ą┐čĆąĖ čüč鹊ą╗ą║ąĮąŠą▓ąĄąĮąĖąĖ ą╝ąŠą┤ąĄą╗ąĖ čü ą┐čĆąĄą┐čÅčéčüčéą▓ąĖąĄą╝ ąĖą╗ąĖ ą┤ą░ąČąĄ ą┤ą▓ąĖąČąĄąĮąĖąĖ ą┐ąŠ čłąĄčĆąŠčģąŠą▓ą░č鹊ą╣ ą┐ąŠą▓ąĄčĆčģąĮąŠčüčéąĖ ąĖąĮąŠą│ą┤ą░ ą▓ąŠąĘąĮąĖą║ą░ąĄčé ą┐ąŠč鹥čĆčÅ ą║ąŠąĮčéą░ą║čéą░ ą▓ ą┐čĆčāąČąĖąĮąĮąŠą╝ ą┤ąĄčƹȹ░č鹥ą╗ąĄ ą▒ą░čéą░čĆąĄą╣, čćč鹊 ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ą║čĆą░čéą║ąŠą▓čĆąĄą╝ąĄąĮąĮąŠą╣ ą┐ąŠč鹥čĆąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čü ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ąŠą╝ ąĖ ą╝ąĖą│ą░ąĮąĖčÄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ ąĮą░ ą┐ą╗ą░č鹥. ąØąĄą┤ą░čĆąŠą╝ ą▓ ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮąŠą╝ ąĖčüą┐ąŠą╗ąĮąĄąĮąĖąĖ ą▓ ą╝ąŠą┤ąĄą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗čüčÅ ą░ą║ą║čāą╝čāą╗čÅč鹊čĆ čü ą┐čĆąŠą▓ąŠą╗ąŠčćąĮčŗą╝ąĖ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ, ą┐čĆąĖą┐ą░čÅąĮąĮčŗą╝ąĖ ą║ ą┐ą╗ą░č鹥.
ą¤ąĄčĆąĄą┤ą░čéčćąĖą║ ą¤ąŠą╝ąĖą╝ąŠ čĆą░ą┤ąĖąŠ-ą╝ąŠą┤čāą╗čÅ, čéą░ą║ąŠą│ąŠ-ąČąĄ ą║ą░ą║ ą▓ ą┐čĆąĖčæą╝ąĮąĖą║ąĄ, ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ čüąŠą┤ąĄčƹȹĖčé 3-ąŠčüąĮčŗą╣ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆ IC2 ąĖ čüą▓ąĄč鹊ą┤ąĖąŠą┤ ą┤ą╗čÅ ąĖąĮą┤ąĖą║ą░čåąĖąĖ ąĮą░ą╗ąĖčćąĖčÅ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čü ą╝ąŠą┤ąĄą╗čīčÄ. ąÜąŠąĮą┤ąĄąĮčüą░č鹊čĆčŗ C2-C4 ąĮą░čĆčÅą┤čā čü čĆąĄąĘąĖčüč鹊čĆą░ą╝ąĖ ą▓ąĮčāčéčĆąĖ IC2 ąŠą▒čĆą░ąĘčāčÄčé ążąØą¦ ą┤ą╗čÅ čäąĖą╗čīčéčĆą░čåąĖąĖ čłčāą╝ąŠą▓ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╣ čćą░čüčéąĖ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆą░. ąśąĘą╝ąĄčĆąĄąĮąĖąĄ ąĄą│ąŠ čüąĖą│ąĮą░ą╗ąŠą▓ ąĮą░ ą▓čŗčģąŠą┤ą░čģ X, Y, Z ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ 12-ą▒ąĖčéąĮčŗą╝ ąÉą”ą¤ ą▓ čüąŠčüčéą░ą▓ąĄ PSoC. ąśąĘą╝ąĄčĆąĄąĮąĖąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ ą║ą░ąČą┤čŗąĄ 100 ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą┐ąĄčĆąĖąŠą┤ąŠą╝ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čü ą╝ąŠą┤ąĄą╗čīčÄ. ąÆčĆąĄą╝ąĄąĮąĮąŠą╣ ąĖąĮč鹥čĆą▓ą░ą╗ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčéčüčÅ Watchdog-ąŠą╝ ą▓ PSoC, čéą░ą║čéąĖčĆčāąĄą╝čŗą╝ ąŠčé čćą░čüąŠą▓ąŠą│ąŠ ą║čĆąĖčüčéą░ą╗ą╗ą░ ąĮą░ ą┐ą╗ą░č鹥 ą╝ąŠą┤čāą╗čÅ. ąĪą▓ąĄč鹊ą┤ąĖąŠą┤ ąĖąĮą┤ąĖčåąĖčĆčāąĄčé čäą░ąĘčŗ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čü ą┐čĆąĖčæą╝ąĮąĖą║ąŠą╝. ą¦ą░čüč鹊čéą░ ąĄą│ąŠ ą▓čüą┐čŗčłąĄą║ čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ ąŠčé ąĮą░čćą░ą╗ą░ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ BLE čāčüčéčĆąŠą╣čüčéą▓, ą┤ąŠ ąŠą▒ąĮą░čĆčāąČąĄąĮąĖčÅ BLE čāčüčéčĆąŠą╣čüčéą▓ą░ čü ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ ą┐čĆąĖčæą╝ąĮąĖą║ą░, čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čü ą┐čĆąĖčæą╝ąĮąĖą║ąŠą╝, ąĖ ą┐čĆąŠčåąĄčüčüąŠą╝ ąŠą║ąŠąĮčćą░ąĮąĖčÅ čćč鹥ąĮąĖčÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝čŗą╝ ą┐čĆąĖčæą╝ąĮąĖą║ąŠą╝ čüąĄčĆą▓ąĖčüąŠą▓ ąĖ ąĖčģ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║. ą¤ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ą▓čüąĄą│ąŠ ą┐čĆąŠčåąĄčüčüą░ čüą▓ąĄč鹊ą┤ąĖąŠą┤ čüą▓ąĄčéąĖčé ą┐ąŠčüč鹊čÅąĮąĮąŠ ą▒ąĄąĘ ą╝ąĖą│ą░ąĮąĖčÅ. ą¤čĆąĖ čŹč鹊ą╝ ąĄą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆ ą©ąśą£ ąŠčéą║ą╗čÄčćą░ąĄčéčüčÅ ąĖ čüą▓ąĄč鹊ą┤ąĖąŠą┤ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąĮąĄą┐ąŠčüčĆąĄą┤čüą▓ąĄąĮąĮąŠ čü ą▓čŗčģąŠą┤ą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą┐ąĖąĮą░ ą┐ąŠčĆčéą░ PSoC. ąÆ ąŠčéą╗ąĖčćąĖąĖ ąŠčé ą┐čĆąĖčæą╝ąĮąĖą║ą░ čāą┤ą░ą╗ąŠčüčī ą┐ąŠą╝ąĄčēą░čéčī čüąĖčüč鹥ą╝čā ą▓ ą│ą╗čāą▒ąŠą║ąĖą╣ čüąŠąĮ ą▓ ą┐čĆąŠą╝ąĄąČčāčéą║ą░čģ ą╝ąĄąČą┤čā ąĖąĘą╝ąĄčĆąĄąĮąĖąĄą╝ čāčüą║ąŠčĆąĄąĮąĖčÅ ąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąŠą▒čŗčéąĖą╣ čüč鹥ą║ą░. ą¤čĆąĖ čŹč鹊ą╝ č鹊ą║ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ ąŠą║ą░ąĘą░ą╗ąŠčüčī ąŠą║ąŠą╗ąŠ 1.6 ą╝ąÉ, ąĖąĘ ą║ąŠč鹊čĆčŗčģ ąŠą║ąŠą╗ąŠ 1.3 ą╝ąÉ ą┐čĆąĖčģąŠą┤ąĖčéčüčÅ ąĮą░ čüą▓ąĄč鹊ą┤ąĖąŠą┤. ąöą╗čÅ ą┤ą░ą╗čīąĮąĄą╣čłąĄą│ąŠ čüąĮąĖąČąĄąĮąĖčÅ č鹊ą║ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čüą╗ąĄą┤ąŠą▓ą░ą╗ąŠ-ą▒čŗ čéą░ą║ąČąĄ ą┐ąŠą│čĆčāąČą░čéčī ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆ ą▓ čüąŠąĮ ą┐ąŠą┤ą░č湥ą╣ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ąĄą│ąŠ ą▓čģąŠą┤ ENA. ą¤ąĄčĆąĄą┤ą░čéčćąĖą║ čüą╝ąŠąĮčéąĖčĆąŠą▓ą░ąĮ ąĮą░ ąŠą┤ąĮąŠčüč鹊čĆąŠąĮąĮąĄą╣ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░č鹥 čĆą░ąĘą╝ąĄčĆąŠą╝ 74×42 ą╝ą╝. ążąŠą╗čīą│ą░ ą▓ą▒ą╗ąĖąĘąĖ ą░ąĮč鹥ąĮąĮčŗ ą╝ąŠą┤čāą╗čÅ čāą┤ą░ą╗ąĄąĮą░ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖčÅą╝ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ. ąæą░čéą░čĆąĄą╣ąĮčŗą╣ ąŠčéčüąĄą║ čĆą░ąĘą╝ąĄčēčæąĮ ąĮą░ čéčŗą╗čīąĮąŠą╣ čüč鹊čĆąŠąĮąĄ ą┐ą╗ą░čéčŗ ąĖ ą┐čĆąĖą▓ąĖąĮč湥ąĮ ą║ ąĮąĄą╣ ą┤ą▓čāą╝čÅ ą▓ąĖąĮčéą░ą╝ąĖ M2. ąĪąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ (ą▓ąĄą┤čāčēąĄąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ - master) čü ą┐čĆąĖčæą╝ąĮąĖą║ąŠą╝ (ą▓ąĄą┤ąŠą╝ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ – slave) ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąŠą▒čŗčéąĖą╣ čüč鹥ą║ą░ BLE ą▓ čäą░ą╣ą╗ąĄ BLEclient.c. ąÜą░ą║ ąĖ ą▓ ą┐čĆąĖčæą╝ąĮąĖą║ąĄ, čüąŠą▒čŗčéąĖąĄ CYBLE_EVT_STACK_ON ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čüč鹥ą║ą░. ąÜą░ą║ č鹊ą╗čīą║ąŠ čŹč鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤čæčé, ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ API čäčāąĮą║čåąĖčÅ CyBle_GapcStartScan ą┤ą╗čÅ ąĮą░čćą░ą╗ą░ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ąŠčüčéčāą┐ąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║čā BLE čāčüčéčĆąŠą╣čüčéą▓. ą¤čĆąĖ ąŠą▒ąĮą░čĆčāąČąĄąĮąĖąĖ čéą░ą║ąŠą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ čüąŠą▒čŗčéąĖąĄ CYBLE_EVT_GAPC_SCAN_PROGRESS_RESULT ąĖ čüč鹥ą║ ą┐ąĄčĆąĄą┤ą░čæčé ąŠą▒čĆą░ą▒ąŠčéčćąĖą║čā ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ (MAC address) čāčüčéčĆąŠą╣čüčéą▓ą░. ą×ą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ čüąŠą▒čŗčéąĖąĄ CYBLE_EVT_GAPC_SCAN_START_STOP. ąÆ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĄ ą┐ąĄčĆą▓ąŠą│ąŠ čüąŠą▒čŗčéąĖčÅ ą┐ąŠą╗čāč湥ąĮąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüčĆą░ą▓ąĮąĖą▓ą░ąĄčéčüčÅ čü čéą░ą║ąŠą▓čŗą╝ ą┤ą╗čÅ ą╝ąŠą┤ąĄą╗ąĖ ą┐čĆąĖčæą╝ąĮąĖą║ą░. ą¤čĆąĖ ąĄą│ąŠ ąĮąĄčüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĖ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčéčüčÅ ą┐čāčéčæą╝ ą┐ąŠą┤ą░čćąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ą║ąŠą╝ą░ąĮą┤čŗ ą▓ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĄ ą▓č鹊čĆąŠą│ąŠ čüąŠą▒čŗčéąĖčÅ. ąÆ ą┐čĆąŠčéąĖą▓ąĮąŠą╝ čüą╗čāčćą░ąĄ čéą░ą╝-ąČąĄ ą┐ąŠą┤ą░čæčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ CyBle_GapcConnectDevice ą┐čĆąŠąĖąĘą▓ąĄčüčéąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čü ą┐čĆąĖčæą╝ąĮąĖą║ąŠą╝. ą¤čĆąĖ čāčüą┐ąĄčłąĮąŠą╝ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĖ čüąĮą░čćą░ą╗ą░ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ čüąŠą▒čŗčéąĖąĄ CYBLE_EVT_GATT_CONNECT_IND, ą┐čĆąĖ ą║ąŠč鹊čĆąŠą╝ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐ąŠą╗čāčćą░ąĄčé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ čāčüčéčĆąŠą╣čüčéą▓ą░ (device handle) ą┐čĆąĖčæą╝ąĮąĖą║ą░, ą║ąŠč鹊čĆčŗą╣ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ connHandle ąĖ ą▓ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤ą░čćąĖ ą║ąŠą╝ą░ąĮą┤ ą┐čĆąĖčæą╝ąĮąĖą║čā. ąöą░ą╗ąĄąĄ čüč鹥ą║ąŠą╝ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ čüąŠą▒čŗčéąĖąĄ CYBLE_EVT_GAP_DEVICE_CONNECTED, čüąĖą╝ą▓ąŠą╗ąĖąĘąĖčĆčāčÄčēąĄąĄ ąŠą▒ ąŠą║ąŠąĮčćą░ąĮąĖąĖ ą┐čĆąŠčåąĄčüčüą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ. ąÆ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé ąŠą▒čŗčćąĮąŠ ąĮą░čćąĖąĮą░čÄčé ą┐čĆąŠčåąĄčüčü čüą▒ąŠčĆą░ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ čüąĄčĆą▓ąĖčüą░čģ, ą┐čĆąĄą┤očüčéą░ą▓ą╗čÅąĄą╝čŗčģ čüąŠąĄą┤ąĖąĮčæąĮąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, ąĖčģ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░čģ ąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░čģ. ą×ą┤ąĮą░ą║ąŠ, ą▓ čåąĄą╗čÅčģ čāą┐čĆąŠčēąĄąĮąĖčÅ ą║ąŠą┤ą░ ą╝čŗ čŹč鹊ą│ąŠ ąĮąĄ ą┤ąĄą╗ą░ąĄą╝, čé.ą║. ąĮą░ą▓ąĄčĆąĮčÅą║ą░ ąĘąĮą░ąĄą╝ ą║ą░ą║ąĖąĄ čüąĄčĆą▓ąĖčüčŗ čüą╗ąĄą┤čāąĄčé ąŠąČąĖą┤ą░čéčī ąŠčé ąĮą░čłąĄą│ąŠ ą┐čĆąĖčæą╝ąĮąĖą║ą░. ąŚąĮą░č湥ąĮąĖčÅ ą┤ąĄčüą║čĆąĖą┐č鹊čĆąŠą▓ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ (characteristic handle) Turn, Speed ąĖ Control ą┐čĆąŠčäąĖą╗čÅ ą┐čĆąĖčæą╝ąĮąĖą║ą░ (ą▓ ąĮą░čłąĄą╝ čüą╗čāčćą░ąĄ 0čģ0012, 0čģ0016, 0x001A) ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ čäą░ą╣ą╗ąĄ BLE_custom.h ą┐čĆąŠąĄą║čéą░ ą┐čĆąĖčæą╝ąĮąĖą║ą░. ąŁč鹊čé čäą░ą╣ą╗ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą║ąŠąĮčäąĖą│čāčĆą░č鹊čĆąŠą╝ ą┐čĆąĖ čüąŠąĘą┤ą░ąĮąĖąĖ ą┐čĆąŠąĄą║čéą░. ąØą░ č乊ąĮąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąŠą▒čŗčéąĖą╣ čüč鹥ą║ą░ BLE ą╗ąŠą│ąĖą║ą░ čĆą░ą▒ąŠčéčŗ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ čćčĆąĄąĘą▓čŗčćą░ą╣ąĮąŠ ą┐čĆąŠčüčéą░. ą¤ąŠ ą┐ąŠą╗čāč湥ąĮąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ ąÉą”ą¤ ąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗ąŠą▓ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆą░. ąŚąĮą░č湥ąĮąĖčÅ ą▓ąĄą║č鹊čĆą░ čāčüą║ąŠčĆąĄąĮąĖčÅ čüčĆą░ą▓ąĮąĖą▓ą░ąĄčéčüčÅ čü ą┐ąŠčĆąŠą│ąŠą▓čŗą╝ąĖ ą┤ą╗čÅ ą┐ąŠą▓ąŠčĆąŠč鹊ą▓ ąĖ čüą║ąŠčĆąŠčüč鹥ą╣ ą▓ čäčāąĮą║čåąĖąĖ Check_Control(), ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┐ąŠą╗ąĄą╣ čüčéčĆčāą║čéčāčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ąĖ. ąöą░ą╗ąĄąĄ ą┐ąŠą┤ą░čæčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ CyBle_GattcWriteCharacteristicValue ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą┐čĆąĖčæą╝ąĮąĖą║čā. ą¤ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ čÅą▓ą╗čÅčÄčéčüčÅ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čü ą┐čĆąĖčæą╝ąĮąĖą║ąŠą╝ (ą┐ąŠą╗čāč湥ąĮąĮčŗą╣ ą┐čĆąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĖ) ąĖ čüčéčĆčāą║čéčāčĆą░ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ. ą¤ąŠčüą╗ąĄą┤ąĮąĖąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāčÄčéčüčÅ ą╗ąĖčłčī ąŠą┤ąĖąĮ čĆą░ąĘ ą┐čĆąĖ ą┐ąŠą┤ą░č湥 ą┐ąĖčéą░ąĮąĖčÅ ą▓ čäčāąĮčåąĖąĖ Init_RAM(), čé.ą║. ą▓ čŹčéąĖčģ čüčéčĆčāą║čéčāčĆą░čģ čéčĆąĄą▒čāąĄčéčüčÅ čāą║ą░ąĘą░čéčī ą╗ąĖčłčī ą░ą┤čĆąĄčü ąĘąĮą░č湥ąĮąĖčÅ ąĮą░ą┤ą╗ąĄąČą░čēąĄą╣ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ. ą¤čĆąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĖ ąĘąĮą░č湥ąĮąĖčÅ ą║ąŠą┤ą░ čüą║ąŠčĆąŠčüčéąĖ ąĖ ą┐ąŠą▓ąŠčĆąŠčéą░ ą░ą┤čĆąĄčü čŹčéąĖčģ ąĘąĮą░č湥ąĮąĖą╣ ą┐čĆąĖ čüčéą░čéąĖč湥čüą║ąŠą╝ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖąĖ ąĖčģ ą▓ RAM ąĮąĄ ą╝ąĄąĮčÅąĄčéčüčÅ. ą¤čĆąĖ ą┐ąŠą▓č鹊čĆąĄąĮąĖąĖ ą║ąŠąĮčüčéčĆčāą║čåąĖąĖ čüą╗ąĄą┤čāąĄčé ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ (čäą░ą╣ą╗ BLEclient.c) ąĖąĘą╝ąĄąĮąĖčéčī ą▓ ą╝ą░čüčüąĖą▓ąĄ serverAddress MAC ą░ą┤čĆąĄčü ą╝ąŠąĄą│ąŠ ą╝ąŠą┤čāą╗čÅ ą┐čĆąĖčæą╝ąĮąĖą║ą░ ąĮą░ ąÆą░čł. ąöą╗čÅ čŹč鹊ą│ąŠ čüą╗ąĄą┤čāąĄčé ą▓ą║ą╗čÄčćąĖčéčī ą┐čĆąĖčæą╝ąĮąĖą║ ą╝ąŠą┤ąĄą╗ąĖ, ą║ąŠč鹊čĆčŗą╣ ą▓ čĆąĄąČąĖą╝ąĄ advertisement ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī čüą▓ąŠą╣ MAC ą░ą┤čĆąĄčü ąĖ ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé ą┐čĆąŠčćąĖčéą░čéčī ą╗čÄą▒čŗą╝ čüą║ą░ąĮąĄčĆąŠą╝ BLE čāčüčéčĆąŠą╣čüčéą▓. ąØą░ą┐čĆąĖą╝ąĄčĆ, čü ą┐ąŠą╝ąŠčēčīčÄ ą┐čĆąŠą╗ąŠąČąĄąĮąĖčÅ CySmart ą┤ą╗čÅ čüą╝ą░čĆčéč乊ąĮąŠą▓, čüą▓ąŠą▒ąŠą┤ąĮąŠ ą┤ąŠčüčéčāą┐ąĮąŠą│ąŠ ą▓ čüąĄčéąĖ. ążą░ą╣ą╗čŗ ą┐ą╗ą░čé ą┤ą╗čÅ Eagle ąĖ ąĖčüčģąŠą┤ąĮąĖą║ąĖ ą┐čĆąŠąĄą║čéą░ ą┐čĆąĖą╗ą░ą│ą░čÄčéčüčÅ. ąĀą░ą┤ąĖčāčü ą┤ąĄą╣čüčéą▓ąĖčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ą┤ą░ąČąĄ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ BLE, ą╝ąŠąČąĮąŠ čüčāčēąĄčüčéą▓ąĄąĮąĮąŠ ą┐ąŠą▓čŗčüąĖčéčī ą┤ąŠ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čüąŠč鹥ąĮ ą╝ąĄčéčĆąŠą▓ ą┐čāčéčæą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą╝ąŠą┤čāą╗ąĄą╣ čü ą▒ąŠą╗čīčłąĄą╣ ą▓čŗčģąŠą┤ąĮąŠą╣ ą╝ąŠčēąĮąŠčüčéčīčÄ. ąóą░ą║ąŠą▓čŗąĄ ąĖą╝ąĄčÄčéčüčÅ čā Cypress, čÅ ą┐čĆąĄąČą┤ąĄ ą▓čüąĄą│ąŠ ąĖą╝ąĄčÄ ą▓ ą▓ąĖą┤čā ąĮąŠą▓čŗąĄ ą╝ąŠą┤čāą╗ąĖ CYBLE-224110-00 čü ąŠą│čĆąŠą╝ąĮąŠą╣ ą┤ą╗čÅ BLE ą╝ąŠčēąĮąŠčüčéčīčÄ +9.5 dBm (ąŠą║ąŠą╗ąŠ 9 mW). ąÜąŠąĮąĄčćąĮąŠ, ą┐čĆąĖ čéą░ą║ąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ čŹč鹊 ą▒čāą┤ąĄčé čāąČąĄ ąĮąĄ čüąŠą▓čüąĄą╝ Low Energy. ążąĖčĆą╝ą░ ą╗čÄą▒ąĄąĘąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖą╗ą░ ąĮą░ą╝ čŹčéąĖ ą╝ąŠą┤čāą╗ąĖ ą┤ą╗čÅ čŹą║čüą┐ąĄčĆąĖą╝ąĄąĮč鹊ą▓, ąŠą┤ąĮą░ą║ąŠ ą┐čĆąŠ ąĮąĖčģ ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ ą║ą░ą║-ąĮąĖą▒čāą┤čī ą▓ ą┤čĆčāą│ąŠą╣ čĆą░ąĘ. ąÆ ąĘą░ą║ą╗čÄč湥ąĮąĖąĖ ą▓ąĖą┤ąĄąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą╝ąŠą┤ąĄą╗čīčÄ. ąøąĖč鹥čĆą░čéčāčĆą░ 1. ąĀąĄą░ą╗ąĖą░ąĘčåąĖčÅ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ GATT-BLE ą┐čĆąŠčäąĖą╗čÅ ąĮą░ RSoC čäąĖčĆą╝čŗ Cypress
ążą░ą╣ą╗čŗ: ąÆčüąĄ ą▓ąŠą┐čĆąŠčüčŗ ą▓ ążąŠčĆčāą╝.
ąŁčéąĖ čüčéą░čéčīąĖ ą▓ą░ą╝ č鹊ąČąĄ ą╝ąŠą│čāčé ą┐čĆąĖą│ąŠą┤ąĖčéčīčüčÅ: |
|
|||||||||||||||||
 |
 |


 |
||||

|
||||




 ąÉą”ą¤ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ąĮąĄą┤ąĄčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠąĄ ą▓ą║ą╗čÄč湥ąĮąĖąĄ. ąØą░čćą░ą╗ąŠ ą┐čĆąŠčåąĄčüčüą░ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ąŠą▓ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆą░ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ. ąÉą”ą¤ čéą░ą║čéąĖčĆčāąĄčéčüčÅ ąŠčé čüą▓ąŠąĄą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąĮą░ čćą░čüč鹊č鹥 6 ą╝ą│čå, čéą░ą║ čćč鹊 ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ čüąŠ ą▓čüąĄčģ čéčĆčæčģ ąŠčüąĄą╣ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆą░ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ ąĘą░ 36 ą╝ąĖą║čĆąŠčüąĄą║čāąĮą┤, ą▓ą║ą╗čÄčćą░čÅ čāčüčĆąĄą┤ąĮąĄąĮąĖąĄ č湥čéčŗčĆčæčģ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ą┐ąŠ ą║ą░ąČą┤ąŠą╣ ąŠčüąĖ. ą¤ąŠą▓ąŠčĆąŠčé ą╝ąŠą┤ąĄą╗ąĖ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ąĮą░ą║ą╗ąŠąĮąŠą╝ ą┐ą╗ą░čéčŗ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ ą▓ą┐čĆą░ą▓ąŠ ąĖ ą▓ą╗ąĄą▓ąŠ ąĮą░ čāą│ąŠą╗ ą┐čĆąĄą▓ąŠčüčģąŠą┤čÅčēąĖą╣ ą┐čĆąĖą╝ąĄčĆąĮąŠ 30°. ąŁčéąĖą╝ ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčéčüčÅ ą┐ąŠą┤ą░čćą░ ą╗ąŠąČąĮčŗčģ ą║ąŠą╝ą░ąĮą┤ ą┐čĆąĖ ąĮąĄą▒ąŠą╗čīčłąĖčģ čäą╗čÄą║čéčāą░čåąĖčÅčģ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą┐ą╗ą░čéčŗ ą▓ čĆčāą║ą░čģ ąŠą┐ąĄčĆą░č鹊čĆą░. ąĪą║ąŠčĆąŠčüčéčī ąĖ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą▓ąĖąČąĄąĮąĖčÅ ą╝ąŠą┤ąĄą╗ąĖ čĆąĄą│čāą╗ąĖčĆčāčÄčéčüčÅ ąĮą░ą║ą╗ąŠąĮąŠą╝ ą┐ą╗ą░čéčŗ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ ą▓ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ ąŠčé čüąĄą▒čÅ ąĖą╗ąĖ ą║ čüąĄą▒ąĄ. ą¤čĆąĖ čŹč鹊ą╝ čüą║ąŠčĆąŠčüčéčī ą╝ąŠą┤ąĄą╗ąĖ ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮą░ čüč鹥ą┐ąĄąĮąĖ ąĮą░ą║ą╗ąŠąĮą░. ą¤ąŠčüą║ąŠą╗čīą║čā ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ 3 ą┤ąĖčüą║čĆąĄčéąĮčŗčģ ąĘąĮą░č湥ąĮąĖčÅ čüą║ąŠčĆąŠčüčéąĖ, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ ą┐ąŠčĆąŠą│ąŠą▓čŗą╝ ąĘąĮą░č湥ąĮąĖčÅą╝ ąĮą░ą║ą╗ąŠąĮą░ ą┐ą╗ą░čéčŗ, ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čüą║ąŠčĆąŠčüčéąĖ ąĮąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąĖ ąĮą░ą║ą╗ąŠąĮąĄ ą┐ą╗ą░čéčŗ ą╝ąĄąČą┤čā čŹčéąĖą╝ąĖ ą┐ąŠčĆąŠą│ąŠą▓čŗą╝ąĖ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ.
ąÉą”ą¤ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ąĮąĄą┤ąĄčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠąĄ ą▓ą║ą╗čÄč湥ąĮąĖąĄ. ąØą░čćą░ą╗ąŠ ą┐čĆąŠčåąĄčüčüą░ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ąŠą▓ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆą░ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ. ąÉą”ą¤ čéą░ą║čéąĖčĆčāąĄčéčüčÅ ąŠčé čüą▓ąŠąĄą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąĮą░ čćą░čüč鹊č鹥 6 ą╝ą│čå, čéą░ą║ čćč鹊 ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ čüąŠ ą▓čüąĄčģ čéčĆčæčģ ąŠčüąĄą╣ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆą░ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ ąĘą░ 36 ą╝ąĖą║čĆąŠčüąĄą║čāąĮą┤, ą▓ą║ą╗čÄčćą░čÅ čāčüčĆąĄą┤ąĮąĄąĮąĖąĄ č湥čéčŗčĆčæčģ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ą┐ąŠ ą║ą░ąČą┤ąŠą╣ ąŠčüąĖ. ą¤ąŠą▓ąŠčĆąŠčé ą╝ąŠą┤ąĄą╗ąĖ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ąĮą░ą║ą╗ąŠąĮąŠą╝ ą┐ą╗ą░čéčŗ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ ą▓ą┐čĆą░ą▓ąŠ ąĖ ą▓ą╗ąĄą▓ąŠ ąĮą░ čāą│ąŠą╗ ą┐čĆąĄą▓ąŠčüčģąŠą┤čÅčēąĖą╣ ą┐čĆąĖą╝ąĄčĆąĮąŠ 30°. ąŁčéąĖą╝ ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčéčüčÅ ą┐ąŠą┤ą░čćą░ ą╗ąŠąČąĮčŗčģ ą║ąŠą╝ą░ąĮą┤ ą┐čĆąĖ ąĮąĄą▒ąŠą╗čīčłąĖčģ čäą╗čÄą║čéčāą░čåąĖčÅčģ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą┐ą╗ą░čéčŗ ą▓ čĆčāą║ą░čģ ąŠą┐ąĄčĆą░č鹊čĆą░. ąĪą║ąŠčĆąŠčüčéčī ąĖ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą▓ąĖąČąĄąĮąĖčÅ ą╝ąŠą┤ąĄą╗ąĖ čĆąĄą│čāą╗ąĖčĆčāčÄčéčüčÅ ąĮą░ą║ą╗ąŠąĮąŠą╝ ą┐ą╗ą░čéčŗ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ ą▓ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ ąŠčé čüąĄą▒čÅ ąĖą╗ąĖ ą║ čüąĄą▒ąĄ. ą¤čĆąĖ čŹč鹊ą╝ čüą║ąŠčĆąŠčüčéčī ą╝ąŠą┤ąĄą╗ąĖ ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮą░ čüč鹥ą┐ąĄąĮąĖ ąĮą░ą║ą╗ąŠąĮą░. ą¤ąŠčüą║ąŠą╗čīą║čā ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ 3 ą┤ąĖčüą║čĆąĄčéąĮčŗčģ ąĘąĮą░č湥ąĮąĖčÅ čüą║ąŠčĆąŠčüčéąĖ, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ ą┐ąŠčĆąŠą│ąŠą▓čŗą╝ ąĘąĮą░č湥ąĮąĖčÅą╝ ąĮą░ą║ą╗ąŠąĮą░ ą┐ą╗ą░čéčŗ, ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čüą║ąŠčĆąŠčüčéąĖ ąĮąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąĖ ąĮą░ą║ą╗ąŠąĮąĄ ą┐ą╗ą░čéčŗ ą╝ąĄąČą┤čā čŹčéąĖą╝ąĖ ą┐ąŠčĆąŠą│ąŠą▓čŗą╝ąĖ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ.





ąĀą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī čüą░ą╣čéą░ ą┐čĆąŠą▓ąĄčĆąĄąĮą░ ą▓ ą▒čĆą░čāąĘąĄčĆą░čģ:
IE8.0, Opera 9.0, Netscape Navigator 7.0, Mozilla Firefox 5.0
ąÉą┤ą░ą┐čéąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą┐čĆąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅčģ 菹║čĆą░ąĮą░ ąŠčé 1280čģ1024 ąĖ ą▓čŗčłąĄ.
ą¤čĆąĖ ą╝ąĄąĮčīčłąĖčģ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅčģ ą▓ąŠąĘą╝ąŠąČąĮąŠ ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĄ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮąŠą╣ ą┐čĆąŠą║čĆčāčéą║ąĖ.
ą¤ąŠ ą▓čüąĄą╝ ą▓ąŠą┐čĆąŠčüą░ą╝ ąŠą▒čĆą░čēą░ą╣č鹥čüčī ą║ ąÜąŠčéčā: kot@radiokot.ru
©2005-2025