–§–æ—Ä—É–º –Ý–∞–¥–∏–æ–ö–æ—Ç • –ü—Ä–æ—Å–º–æ—Ç—Ä —Ç–µ–º—ã - –≤–æ–ø—Ä–æ—Å –ø–æ mikroc
–°–æ–æ–±—â–µ–Ω–∏—è –±–µ–∑ –æ—Ç–≤–µ—Ç–æ–≤ | –ê–∫—Ç–∏–≤–Ω—ã–µ —Ç–µ–º—ã
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 3 –∏–∑ 4
[ –°–æ–æ–±—â–µ–Ω–∏–π: 62 ]
, , ,
–ê–≤—Ç–æ—Ä
–°–æ–æ–±—â–µ–Ω–∏–µ
ARV
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –≤–æ–ø—Ä–æ—Å –ø–æ mikroc
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –Ω–æ—è 25, 2016 19:49:13
–£–º, —á–µ—Å—Ç—å –∏ —Å–æ–≤–µ—Å—Ç—å. –ò —Å–∫—Ä–æ–º–Ω–æ—Å—Ç—å.
–ö–∞—Ä–º–∞: 98
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2116
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –¥–µ–∫ 28, 2006 08:19:56–°–æ–æ–±—â–µ–Ω–∏–π: 18399–û—Ç–∫—É–¥–∞: –ù–æ–≤–æ—á–µ—Ä–∫–∞—Å—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 1
–ú–µ–¥–∞–ª–∏: 2
ds3ds3 –ø–∏—Å–∞–ª(–∞):
unsigned int arr = {1 , &a};
–∞ —Ç–∞–∫ –∏ –Ω–µ –¥–æ–ª–∂–Ω–æ —Ä–∞–±–æ—Ç–∞—Ç—å: –≤—ã –ø—ã—Ç–∞–µ—Ç–µ—Å—å –ø—Ä–∏—Å–≤–æ–∏—Ç—å —á–∏—Å–ª—É –Ω–µ—á—Ç–æ —Ç–∏–ø–∞ –º–∞—Å—Å–∏–≤–∞ –∏–ª–∏ —Å—Ç—Ä—É–∫—Ç—É—Ä—ã. –≤ —Ñ–∏–≥—É—Ä–Ω—ã—Ö —Å–∫–æ–±–∫–∞—Ö - —ç—Ç–æ –ª–∏–±–æ –º–∞—Å—Å–∏–≤, –ª–∏–±–æ —Å—Ç—Ä—É–∫—Ç—É—Ä–∞.
–∞ –ø—Ä–∞–≤–∏–ª—å–Ω–æ –±—ã–ª–æ –±—ã —Ç–∞–∫:
1. –æ–±—ä—è–≤–∏—Ç—å —Ç–∏–ø –¥–ª—è —ç–ª–µ–º–µ–Ω—Ç–∞ –º–µ–Ω—é
2. –æ–±—ä—è–≤–∏—Ç—å –º–∞—Å—Å–∏–≤ –∏–∑ —ç—Ç–∏—Ö —ç–ª–µ–º–µ–Ω—Ç–æ–≤
–≤–æ—Ç —Ç–æ–≥–¥–∞ –º–æ–∂–Ω–æ –±—É–¥–µ—Ç –≤—Å–µ –ø—Ä–∏—Å–≤–∞–∏–≤–∞—Ç—å.
–ö–æ–¥:
typedef struct{
–µ—Å–ª–∏ —Ä–∞—Å—Å–º–∞—Ç—Ä–∏–≤–∞—Ç—å —á–µ–ª–æ–≤–µ–∫–∞ —Å–Ω–∏–∑—É, –ø–æ–∫–∞–∂–µ—Ç—Å—è, —á—Ç–æ –º–æ–∑–≥ —É –Ω–µ–≥–æ –≥–ª—É–±–æ–∫–æ –≤ –∂–æ–ø–µ–ú–æ–π —É—é—Ç–Ω—ã–π –±–ª–æ–∂–∏–∫ ... –∑–∞—Ö–æ–¥–∏—Ç–µ!
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
ds3ds3
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –≤–æ–ø—Ä–æ—Å –ø–æ mikroc
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –Ω–æ—è 25, 2016 20:04:13
–ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É!
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –Ω–æ—è 21, 2012 02:55:37–°–æ–æ–±—â–µ–Ω–∏–π: 37
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ù–æ –≤–µ–¥—å –º—ã –∑–Ω–∞–µ–º —á—Ç–æ –∞–¥—Ä–µ—Å –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π - —ç—Ç–æ —á–∏—Å–ª–æ –∏–∑ –∫–æ–Ω–µ—á–Ω–æ–≥–æ –¥–∏–∞–ø–∞–∑–æ–Ω–∞, –ø–æ—á–µ–º—É –Ω–µ–ª—å–∑—è –∑–∞–ø–∏—Å–∞—Ç—å –∞–¥—Ä–µ—Å?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
ARV
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –≤–æ–ø—Ä–æ—Å –ø–æ mikroc
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –Ω–æ—è 25, 2016 20:13:08
–£–º, —á–µ—Å—Ç—å –∏ —Å–æ–≤–µ—Å—Ç—å. –ò —Å–∫—Ä–æ–º–Ω–æ—Å—Ç—å.
–ö–∞—Ä–º–∞: 98
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2116
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –¥–µ–∫ 28, 2006 08:19:56–°–æ–æ–±—â–µ–Ω–∏–π: 18399–û—Ç–∫—É–¥–∞: –ù–æ–≤–æ—á–µ—Ä–∫–∞—Å—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 2
–ú–µ–¥–∞–ª–∏: 2
ds3ds3 –ø–∏—Å–∞–ª(–∞):
–¥–æ–ø—É—Å—Ç–∏–º–æ –ª–∏ –ø–∏—Å–∞—Ç—å?
–¥–æ–ø—É—Å—Ç–∏–º–æ –≤—Å–µ, —á—Ç–æ –Ω–µ –∑–∞–ø—Ä–µ—â–µ–Ω–æ. –Ω–æ —á–µ–º –±–æ–ª—å—à–µ –Ω–∞–ø–∏—Å–∞–Ω–æ, —Ç–µ–º –ª–µ–≥—á–µ –∑–∞–ø—É—Ç–∞—Ç—å—Å—è. –Ω–µ –∫–æ–º–º–µ–Ω—Ç–∏—Ä—É—è –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ—Å—Ç—å –º–µ–Ω—è—Ç—å –æ–¥–∏–Ω –±–∞–π—Ç –¥–≤—É—Ö–±–∞–π—Ç–Ω–æ–π –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π —á–µ—Ä–µ–∑ —É–∫–∞–∑–∞—Ç–µ–ª—å –Ω–∞ –¥–≤—É—Ö–±–∞–π—Ç–Ω—É—é –ø–µ—Ä–µ–º–µ–Ω–Ω—É—é, —è –ª–∏—á–Ω–æ —Ç–∞–∫ –Ω–µ –¥–µ–ª–∞–ª –±—ã.
—è –±—ã –ø–æ—Å—Ç—É–ø–∏–ª —Ä–æ–≤–Ω–æ —Ç–∞–∫ –∂–µ, –∫–∞–∫ –≤—ã—à–µ:
1. –æ–±—ä—è–≤–∏–ª –±—ã –Ω—É–∂–Ω—ã–π –º–Ω–µ —Ç–∏–ø
2. –æ–±—ä—è–≤–∏–ª –±—ã —É–∫–∞–∑–∞—Ç–µ–ª—å –Ω–∞ –Ω–µ–≥–æ
3. –ø—Ä–∏—Å–≤–æ–∏–ª –±—ã —ç—Ç–æ—É —É–∫–∞–∑–∞—Ç–µ–ª—é –Ω—É–∂–Ω—ã–π –∞–¥—Ä–µ—Å (—Å –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞–Ω–∏–µ–º –∫ void*)
4. —Ä–∞–±–æ—Ç–∞–ª –±—ã —Å –º–æ–∏–º —É–∫–∞–∑–∞—Ç–µ–ª–µ–º –±–µ–∑ –≤—Å—è–∫–∏—Ö –∏–∑–≤—Ä–∞—â–µ–Ω–∏–π
–ö–æ–¥:
int var; // –ø–µ—Ä–µ–º–µ–Ω–Ω–∞—è
–Ω—É –∏–ª–∏ –∫–∞–∫- —Ç–æ —Ç–∞–∫.
—Ç–æ–ª—å–∫–æ –º–Ω–æ–≥–∏–µ –≤–∞–º —Å–∫–∞–∂—É—Ç, —á—Ç–æ –º–æ–π –ø–æ–¥—Ö–æ–¥ –ø–ª–∞—Ç—Ñ–æ—Ä–º–æ–∑–∞–≤–∏—Å–∏–º: –¥–µ—Å–∫–∞—Ç—å, –Ω–µ –≤–æ –≤—Å–µ—Ö –ø–ª–∞—Ç—Ñ–æ—Ä–º–∞—Ö –º–ª–∞–¥—à–∏–π –±–∞–π—Ç —Å–ª–µ–¥—É–µ—Ç –ø–µ—Ä–≤—ã–º –≤ –º–Ω–æ–≥–æ–±–∞–π—Ç–Ω—ã—Ö –ø–µ—Ä–µ–º–µ–Ω–Ω—ã—Ö... –Ω–æ –º–Ω–µ –Ω–∞ —ç—Ç–æ –Ω–∞–ø–ª–µ–≤–∞—Ç—å: —è —Ä–∞–±–æ—Ç–∞—é —Ç–æ–ª—å–∫–æ —Å —Ç–∞–∫–∏–º–∏ –ø–ª–∞—Ç—Ñ–æ—Ä–º–∞–º–∏, –≥–¥–µ –º–ª–∞–¥—à–∏–π –±–∞–π—Ç –∏–¥–µ—Ç –≤–ø–µ—Ä–µ–¥–∏
–µ—Å–ª–∏ —Ä–∞—Å—Å–º–∞—Ç—Ä–∏–≤–∞—Ç—å —á–µ–ª–æ–≤–µ–∫–∞ —Å–Ω–∏–∑—É, –ø–æ–∫–∞–∂–µ—Ç—Å—è, —á—Ç–æ –º–æ–∑–≥ —É –Ω–µ–≥–æ –≥–ª—É–±–æ–∫–æ –≤ –∂–æ–ø–µ–ú–æ–π —É—é—Ç–Ω—ã–π –±–ª–æ–∂–∏–∫ ... –∑–∞—Ö–æ–¥–∏—Ç–µ!
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
alex_
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –≤–æ–ø—Ä–æ—Å –ø–æ mikroc
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –Ω–æ—è 25, 2016 21:13:59
–û–ø—ã—Ç–Ω—ã–π –∫–æ—Ç
–ö–∞—Ä–º–∞: 7
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 92
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –∏—é–Ω 01, 2013 22:24:21–°–æ–æ–±—â–µ–Ω–∏–π: 765–û—Ç–∫—É–¥–∞: –ü–§–û
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 1
–ß—ë—Ç–æ —è –ø–æ–Ω—è—Ç—å –Ω–µ –º–æ–≥—É –≤ —á—ë–º –≤–µ—Å—å —Å—ã—Ä–±–æ—Ä, –µ—Å–ª–∏ –Ω—É–∂–Ω–æ –æ–±—Ä–∞—â–∞—Ç—å—Å—è –∫ –º–ª–∞–¥—à–∏–º –∏ —Å—Ç–∞—Ä—à–∏–º –±–∞–π—Ç–∞–º –¥–≤—É—Ö–±–∞–π—Ç–æ–≤–æ–π –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π, –∏ –µ—Å–ª–∏ –≤—ã –ø–∏—à–µ—Ç–µ –∏–º–µ–Ω–Ω–æ –Ω–∞
mikroC , —Ç–æ —Ç–∞–º –¥–µ–ª–∞–µ—Ç—Å—è –≤—Å—ë –ø—Ä–æ—Å—Ç–æ:
–ö–æ–¥:
Example:
–¢–∞–∫ –∂–µ –º–æ–∂–Ω–æ –∏ –æ–±—Ä–∞—â–∞—Ç—å—Å—è –∏ –∫ 4—Ö –±–∞–π—Ç–Ω–æ–π –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π.
–¢–∞–∫ —á—Ç–æ —á–∏—Ç–∞–µ–º —Ö–µ–ª–ø –∫ –ø—Ä–æ–≥—Ä–∞–º–º–µ –∏ –Ω–µ —à–ª–∞–Ω–≥—É–µ–º
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
–í—ã–±–∏—Ä–∞–µ–º –∏–Ω–¥—É—Å—Ç—Ä–∏–∞–ª—å–Ω—ã–µ –∏ –º–µ–¥–∏—Ü–∏–Ω—Å–∫–∏–µ –∏—Å—Ç–æ—á–Ω–∏–∫–∏ –ø–∏—Ç–∞–Ω–∏—è MEAN WELL –≤ –æ—Ç–∫—Ä—ã—Ç–æ–º –∏—Å–ø–æ–ª–Ω–µ–Ω–∏–∏
–ò—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏–µ –º–æ–¥—É–ª—å–Ω—ã—Ö –∏—Å—Ç–æ—á–Ω–∏–∫–æ–≤ –ø–∏—Ç–∞–Ω–∏—è –æ—Ç–∫—Ä—ã—Ç–æ–≥–æ —Ç–∏–ø–∞ —à–∏—Ä–æ–∫–æ —Ä–∞—Å–ø—Ä–æ—Å—Ç—Ä–∞–Ω–µ–Ω–æ –≤ —Å–æ–≤—Ä–µ–º–µ–Ω–Ω—ã—Ö —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞—Ö. –ü—Ä–∏—Å—É—â–∏–µ –∏–º –∫–æ–º–ø–∞–∫—Ç–Ω–æ—Å—Ç—å, –≥–∏–±–∫–æ—Å—Ç—å –≤ –∏–Ω—Ç–µ–≥—Ä–∞—Ü–∏–∏ –∏ –≤—ã—Å–æ–∫–∞—è —ç—Ñ—Ñ–µ–∫—Ç–∏–≤–Ω–æ—Å—Ç—å –¥–µ–ª–∞—é—Ç –∏—Ö –æ—Ç–ª–∏—á–Ω—ã–º —Ä–µ—à–µ–Ω–∏–µ–º –¥–ª—è —Å–∏—Å—Ç–µ–º –ø—Ä–æ–º—ã—à–ª–µ–Ω–Ω–æ–π –∞–≤—Ç–æ–º–∞—Ç–∏–∑–∞—Ü–∏–∏, —Ç–µ–ª–µ–∫–æ–º–º—É–Ω–∏–∫–∞—Ü–∏–æ–Ω–Ω–æ–≥–æ –æ–±–æ—Ä—É–¥–æ–≤–∞–Ω–∏—è, –º–µ–¥–∏—Ü–∏–Ω—Å–∫–æ–π —Ç–µ—Ö–Ω–∏–∫–∏, —É—Å—Ç—Ä–æ–π—Å—Ç–≤ ¬´—É–º–Ω–æ–≥–æ –¥–æ–º–∞¬ª –∏ –ø—Ä–æ—á–∏—Ö –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–π. –Ý–∞—Å—Å–º–æ—Ç—Ä–∏–º –ø–æ–¥—Ä–æ–±–Ω–µ–µ —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫–∏ –∏ –æ—Å–æ–±–µ–Ω–Ω–æ—Å—Ç–∏ —Ç—Ä–µ—Ö —Å–∞–º—ã—Ö –ø–æ–ø—É–ª—è—Ä–Ω—ã—Ö –≤–∞—Ä–∏–∞–Ω—Ç–æ–≤ AC/DC-–ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª–µ–π MW –æ—Ç–∫—Ä—ã—Ç–æ–≥–æ —Ç–∏–ø–∞, –ø–æ–¥—Ö–æ–¥—è—â–∏—Ö –¥–ª—è –ø—Ä–∏–º–µ–Ω–µ–Ω–∏—è –≤ –ø—Ä–æ–º—ã—à–ª–µ–Ω–Ω—ã—Ö —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞—Ö - —Å–µ—Ä–∏–π EPS, EPP –∏ RPS –ø—Ä–µ–¥—Å—Ç–∞–≤–ª–µ–Ω–Ω—ã—Ö –Ω–∞ Meanwell.market.
–ü–æ–¥—Ä–æ–±–Ω–µ–µ>>
ds3ds3
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –≤–æ–ø—Ä–æ—Å –ø–æ mikroc
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –Ω–æ—è 25, 2016 21:23:23
–ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É!
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –Ω–æ—è 21, 2012 02:55:37–°–æ–æ–±—â–µ–Ω–∏–π: 37
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–•–º–º... –î–µ–π—Å—Ç–≤–∏—Ç–µ–ª—å–Ω–æ... –°–ø–∞—Å–∏–±–æ.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
alex_
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –≤–æ–ø—Ä–æ—Å –ø–æ mikroc
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –Ω–æ—è 25, 2016 22:08:58
–û–ø—ã—Ç–Ω—ã–π –∫–æ—Ç
–ö–∞—Ä–º–∞: 7
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 92
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –∏—é–Ω 01, 2013 22:24:21–°–æ–æ–±—â–µ–Ω–∏–π: 765–û—Ç–∫—É–¥–∞: –ü–§–û
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–¶–∏—Ç–∞—Ç–∞:
–ê –¥–∏—Ä–µ–∫—Ç–∏–≤–∞ –∞–±—Å–æ–ª—é—Ç —É –≤–∞—Å —Ä–∞–±–æ—Ç–∞–µ—Ç –∫–∞–∫ –Ω–∞–¥–æ
–¢—É—Ç –ø–æ –ø–æ–¥—Ä–æ–±–Ω–µ–µ, —á—Ç–æ –∑–∞ –¥–∏—Ä–µ–∫—Ç–∏–≤–∞
–î–∞ –∏ –∑–∞—á–µ–º –ø—Ä–∏–≤—è–∑—ã–≤–∞—Ç—å—Å—è –∫ –∞–±—Å–æ–ª—é—Ç–Ω—ã–º –∑–Ω–∞—á–µ–Ω–∏—è–º, –º–Ω–µ –Ω–µ —Å–æ–≤—Å–µ–º –ø–æ–Ω—è—Ç–Ω–∞, –µ—Å—Ç—å –∂–µ –∫–æ–Ω—Å—Ç–∞–Ω—Ç—ã
–ê –ø–æ –ø–æ–≤–æ–¥—É —Å—Ç–∞—Ç–∏—á–µ—Å–∫–æ–≥–æ –º–∞—Å—Å–∏–≤–∞:
int array[10]; // –æ–±—ä—è–≤–∏–ª–∏, –º–æ–∂–Ω–æ —Ç—É—Ç –∂–µ –∏ –∑–Ω–∞—á–µ–Ω–∏—è –ø—Ä–∏—Å–≤–æ–∏—Ç—å –µ—Å–ª–∏ –Ω–∞–¥–æ
t=array[i]; // –æ–±—Ä–∞—â–µ–Ω–∏–µ –∫ —ç–ª–µ–º–µ–Ω—Ç—É –ø–æ –∏–Ω–¥–µ–∫—Å—É
–í—Ä–æ–¥–µ–∂ –≤—Å—ë –ø—Ä–æ—Å—Ç–æ, –∏–ª–∏ —è —á–µ–≥–æ —Ç–æ –Ω–µ–¥–æ–ø–æ–Ω—è–ª –≤ –≤–∞—à–∏—Ö —Ç–æ–Ω–∫–∏—Ö —Ä–µ–∞–ª–∏–∑—É–µ–º—ã—Ö –º–æ—Ç–∏–≤–∞—Ö
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
ds3ds3
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –≤–æ–ø—Ä–æ—Å –ø–æ mikroc
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –Ω–æ—è 26, 2016 10:10:36
–ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É!
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –Ω–æ—è 21, 2012 02:55:37–°–æ–æ–±—â–µ–Ω–∏–π: 37
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
Directive absolute specifies the starting address in RAM for a variable. If the variable is multi-byte, higher bytes will be stored at the consecutive locations.
Directive absolute is appended to declaration of a variable:
–ö–æ–¥:
short x absolute 0x22;
Be careful when using the absolute directive, as you may overlap two variables by accident. For example:
–ö–æ–¥:
char i absolute 0x33;
–ù–∞–ª–æ–∂–µ–Ω–∏–µ —Ç–µ—Ö —á—Ç–æ –æ–±—ä—è–≤–ª–µ–Ω—ã —á–µ—Ä–µ–∑ –∞–±—Å–æ–ª—é—Ç –ø—Ä–∏ –æ—à–∏–±–∫–µ –ø–æ–Ω—è—Ç–Ω—ã, –∞ –≤–æ—Ç –ø—Ä–æ—á–∏–µ –ø–µ—Ä–µ–º–µ–Ω–Ω—ã–µ –Ω–∞–∫–ª–∞–¥—ã–≤–∞—é—Ç—Å—è –Ω–∞ –∞–±—Å–æ–ª—é—Ç–Ω—ã–µ.
–ê –ø—Ä–æ –º–∞—Å—Å–∏–≤... –Ø —Ç–∞–º –≤—ã—à–µ –ø—Ä–æ–ø—É—Å—Ç–∏–ª const
–ö–æ–¥:
char a = 10;
–ï—Å–ª–∏ –Ω–∞–ø–∏—Å–∞—Ç—å
p1 = arr[1], —Ç–æ –ø–æ–ª—É—á–∏–º –∞–¥—Ä–µ—Å –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π –∞.
p1 = *arr[1], –≤—ã–∑—ã–≤–∞–µ—Ç –æ—à–∏–±–∫—É.
p1 = *((char*)arr[1]), –ø–æ–ª—É—á–∏–º —Å–æ–¥–µ—Ä–∂–∏–º–æ–µ –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π –∞ —á–µ—Ä–µ–∑ —Å—Ç–∞—Ç–∏—á–µ—Å–∫–∏–π —É–∫–∞–∑–∞—Ç–µ–ª—å.
–ü–æ—Å–ª–µ–¥–Ω–µ–µ –≤—ã–∑—ã–≤–∞–µ—Ç —Å–æ–º–Ω–µ–Ω–∏—è –≤ –ø—Ä–∞–≤–∏–ª—å–Ω–æ—Å—Ç–∏ –Ω–∞–ø–∏—Å–∞–Ω–Ω–æ–≥–æ.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
alex_
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –≤–æ–ø—Ä–æ—Å –ø–æ mikroc
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –Ω–æ—è 26, 2016 15:16:00
–û–ø—ã—Ç–Ω—ã–π –∫–æ—Ç
–ö–∞—Ä–º–∞: 7
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 92
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –∏—é–Ω 01, 2013 22:24:21–°–æ–æ–±—â–µ–Ω–∏–π: 765–û—Ç–∫—É–¥–∞: –ü–§–û
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ù—É —Ç–µ–ø–µ—Ä—å —è –Ω–∞—á–∞–ª –ø–æ–Ω–∏–º–∞—Ç—å –∫ —á–µ–º—É –≤—ã –∫–ª–æ–Ω–∏—Ç–µ, —è –ø—Ä–æ –∞–±—Å–æ–ª—é—Ç–Ω—ã–µ –∞–¥—Ä–µ—Å–∞ –ø–µ—Ä–µ–º–µ–Ω–Ω—ã—Ö, –Ω–æ –ø–æ–Ω—è—Ç—å –Ω–µ –º–æ–≥—É –¥–ª—è —á–µ–≥–æ –Ω—É–∂–Ω–∞ —Ç–∞–∫–∞—è –∂—ë—Å—Ç–∫–∞—è –ø—Ä–∏–≤—è–∑–∫–∞. –î–æ–ø—É—Å—Ç–∏–º —É –Ω–∞—Å –µ—Å—Ç—å –º–∞—Å—Å–∏–≤ 10, 50 –¥–∞ —Ö–æ—Ç—å 100 —ç–ª–µ–º–µ–Ω—Ç–æ–≤, –ø—Ä–∏—Å–≤–æ–∏–ª–∏ –µ–º—É –∏–º—è –∏ –æ–±—Ä–∞—â–∞–µ—Ç–µ—Å—å –∫ –Ω–µ–º—É –ø–æ –∏–º–µ–Ω–∏ –∏ –Ω–æ–º–µ—Ä—É(–∏–Ω–¥–µ–∫—Å—É) –∫ –∫–æ–Ω–∫—Ä–µ—Ç–Ω–æ–º—É —ç–ª–µ–º–µ–Ω—Ç—É —ç—Ç–æ–≥–æ –º–∞—Å—Å–∏–≤–∞. –Ø –Ω–∏–∫–æ–≥–¥–∞ –Ω–µ –∑–∞–¥–∞–≤–∞–ª—Å—è –≤–æ–ø—Ä–æ—Å–æ–º –ø—Ä–∏–≤—è–∑—ã–≤–∞—Ç—å –º–∞—Å—Å–∏–≤ –∫ –æ–ø—Ä–µ–¥–µ–ª—ë–Ω–Ω–æ–º—É –º–µ—Å—Ç—É –≤ –æ–ø–µ—Ä–∞—Ç–∏–≤–∫–µ, —ç—Ç–æ –∂–µ –∑–∞–¥–∞—á–∞ –∫–æ–º–ø–∏–ª—è—Ç–æ—Ä–∞, –¥–∞ –∏ —è–∑—ã–∫ –° —ç—Ç–æ —è–∑—ã–∫ –≤—ã—Å–æ–∫–æ–≥–æ —É—Ä–æ–≤–Ω—è, —Ç–∞–º —Ç–∞–∫–∏–µ –º–µ–ª–æ—á–∏ –æ–±—ã—á–Ω–æ –æ–ø—É—Å–∫–∞—é—Ç—Å—è. –ü–æ –ø–æ–≤–æ–¥—É –∂—ë—Å—Ç–∫–æ–π –ø—Ä–∏–≤—è–∑–∫–∏ —ç—Ç–æ –ø–æ—Ö–æ–∂–µ –Ω–∞ —Ö–æ–¥ –º—ã—Å–ª–µ–π –ø—Ä–∏ –Ω–∞–ø–∏—Å–∞–Ω–∏–∏ –Ω–∞ –∞—Å—Å–µ–º–±–ª–µ—Ä–µ.
–ü–æ –ø–æ–≤–æ–¥—É –º–∞—Å—Å–∏–≤–∞, –≤—ã –ø–æ—á–µ–º—É —Ç–æ –µ–≥–æ –Ω–∞—Å–∏–ª—å–Ω–æ –ø—ã—Ç–∞–µ—Ç–µ—Å—å —Å–∫–ª–æ–Ω–∏—Ç—å –∫ —Å—Ç—Ä—É–∫—Ç—É—Ä–µ. –°—Ç—Ä—É–∫—Ç—É—Ä–∞ –º–æ–∂–µ—Ç –≤ —Å–µ–±–µ —Å–æ–¥–µ—Ä–∂–∞—Ç—å –ø–æ–ª—è —Å —Ä–∞–∑–Ω—ã–º–∏ —Ç–∏–ø–∞–º–∏ –ø–µ—Ä–µ–º–µ–Ω–Ω—ã—Ö –∏ –≤ —Ç–æ–º —á–∏—Å–ª–µ –∏ –∞–¥—Ä–µ—Å. –ê –º–∞—Å—Å–∏–≤ —ç—Ç–æ —ç–Ω–Ω–æ–µ –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ –æ–¥–Ω–æ—Ç–∏–ø–Ω—ã—Ö —ç–ª–µ–º–µ–Ω—Ç–æ–≤, —Ç.–µ. –µ—Å–ª–∏ –≤—ã –æ–±—ä—è–≤–∏–ª–∏ —Ç–∏–ø int —Ç–æ –≤—Å–µ —ç–ª–µ–º–µ–Ω—Ç—ã –≤ –º–∞—Å—Å–∏–≤–µ –±—É–¥–µ—Ç –ø–æ 2 –±–∞–π—Ç–∞ –∏ —Ç–∏–ø–∞ int. –ú–æ–∂–Ω–æ –∫–æ–Ω–µ—á–Ω–æ –ø–æ–º–µ—Å—Ç–∏—Ç—å –≤ —ç—Ç–æ—Ç –º–∞—Å—Å–∏–≤ –∞–¥—Ä–µ—Å–∞, –µ—Å–ª–∏ –æ–Ω–∏ –∏–º–µ—é—Ç —Ä–∞–∑–º–µ—Ä 2 –±–∞–π—Ç–∞.
–ü—Ä–∏–º–µ—Ä –º–∞—Å—Å–∏–≤–∞:
int arr[10]={0,1,2,3,4,5,6,7,8,9};
–ï—Å–ª–∏ –∂–µ –Ω—É–∂–Ω–æ –ø–µ—Ä–µ–¥–∞—Ç—å –∑–Ω–∞—á–µ–Ω–∏–µ –≤ —Ñ—É–Ω–∫—Ü–∏—é —Ç–æ –ø—Ä–æ—Å—Ç–æ –ø–µ—Ä–µ–¥–∞—ë–º –∞–¥—Ä–µ—Å –º–∞—Å—Å–∏–≤–∞, –æ–ø—è—Ç—å –∂–µ –Ω–µ –≤–∞–∂–Ω–æ –≥–¥–µ –æ–Ω –Ω–∞—Ö–æ–¥–∏—Ç—å—Å—è –≤ –æ–ø–µ—Ä–∞—Ç–∏–≤–Ω–æ–π –ø–∞–º—è—Ç–∏.
–ö–æ–¥:
int k;
–¶–∏—Ç–∞—Ç–∞:
p1 = *arr[1], –≤—ã–∑—ã–≤–∞–µ—Ç –æ—à–∏–±–∫—É.
–ù—É –≤—Å—ë –ª–æ–≥–∏—á–Ω–æ, –≤—ã –æ–±—ä—è–≤–∏–ª–∏ –º–∞—Å—Å–∏–≤ –∫–∞–∫ –æ–¥–Ω–æ–º–µ—Ä–Ω—ã–π –∞ –ø—ã—Ç–∞–µ—Ç–µ—Å—å –æ–±—Ä–∞—â–∞—Ç—å—Å—è –∫–∞–∫ –¥–≤—É—Ö–º–µ—Ä–Ω–æ–º—É –º–∞—Å—Å–∏–≤—É(–æ–¥–Ω–æ–º–µ—Ä–Ω—ã–π –º–∞—Å—Å–∏–≤ —ç—Ç–æ —Å—Ç—Ä–æ–∫–∞, –∞ –¥–≤—É—Ö–º–µ—Ä–Ω—ã–π —ç—Ç–æ –Ω–∞–±–æ—Ä —Å—Ç—Ä–æ–∫)
–û–±—ä—è–≤–ª–µ–Ω–∏–µ –¥–≤—É—Ö–º–µ—Ä–Ω–æ–≥–æ –º–∞—Å—Å–∏–≤–∞:
int arr[2][3]={{1,2,3},{4,5,6}};
–ò–ª–∏ –∂–µ:
char[3][12]={{"–ü–æ–Ω–µ–¥–µ–ª—å–Ω–∏–∫"},{"–í—Ç–æ—Ä–Ω–∏–∫"},{"–°—Ä–µ–¥–∞"}};
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
ds3ds3
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –≤–æ–ø—Ä–æ—Å –ø–æ mikroc
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç —è–Ω–≤ 10, 2017 10:54:59
–ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É!
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –Ω–æ—è 21, 2012 02:55:37–°–æ–æ–±—â–µ–Ω–∏–π: 37
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–í—Å–µ–º –ø—Ä–∏–≤–µ—Ç.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
GARMIN
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –≤–æ–ø—Ä–æ—Å –ø–æ mikroc
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç —è–Ω–≤ 10, 2017 19:49:01
–î–µ—Ä–∂–∏—Ç –ø–∞—è–ª—å–Ω–∏–∫ —Ö–≤–æ—Å—Ç–æ–º
–ö–∞—Ä–º–∞: 16
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 196
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –¥–µ–∫ 02, 2012 16:58:33–°–æ–æ–±—â–µ–Ω–∏–π: 915–û—Ç–∫—É–¥–∞: –æ—Ç —Ç—É–¥–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 1
–ü–æ–ø—Ä–æ–±—É–π static const my_struct.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
ds3ds3
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –≤–æ–ø—Ä–æ—Å –ø–æ mikroc
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç —Ñ–µ–≤ 02, 2017 16:35:56
–ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É!
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –Ω–æ—è 21, 2012 02:55:37–°–æ–æ–±—â–µ–Ω–∏–π: 37
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ê –≤–æ—Ç —Å—Ç—ë–∫ –≤ –ú–ö –∏—Å–ø–æ–ª—å–∑—É–µ—Ç—Å—è –æ—Ç–¥–µ–ª—å–Ω–æ –¥–ª—è –æ—Å–Ω–æ–≤–Ω–æ–π –ø—Ä–æ–≥—Ä–∞–º–º—ã –∏ –æ—Ç–¥–µ–ª—å–Ω–æ –¥–ª—è –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–π? –ò–ª–∏ –Ω–µ–ª—å–∑—è –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å call –≤ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è—Ö? –ò–ª–∏ MikroC —É—á—Ç—ë—Ç –≤–º–µ—Å—Ç–µ —Å —Å–æ—Ö—Ä–∞–Ω–µ–Ω–∏–µ–º –∫–æ–Ω—Ç–µ–∫—Å—Ç–∞ –µ—â—ë –∏ —Ä–∞–∑–Ω—ã–µ —Å—Ç—ë–∫–∏?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Zhuk72
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –≤–æ–ø—Ä–æ—Å –ø–æ mikroc
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç —Ñ–µ–≤ 02, 2017 16:59:45
–°–≤–µ—Ä–ª–∏—Ç —Ç–µ–∫—Å—Ç–æ–ª–∏—Ç –∫–æ–≥—Ç—è–º–∏
–ö–∞—Ä–º–∞: 25
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 168
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —è–Ω–≤ 29, 2014 08:41:31–°–æ–æ–±—â–µ–Ω–∏–π: 1231–û—Ç–∫—É–¥–∞: –ë–∞–∫—É
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–°—Ç–µ–∫ (—ç), –Ω–µ —Å—Ç—ë–∫.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
ds3ds3
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –≤–æ–ø—Ä–æ—Å –ø–æ mikroc
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç —Ñ–µ–≤ 03, 2017 05:58:08
–ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É!
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –Ω–æ—è 21, 2012 02:55:37–°–æ–æ–±—â–µ–Ω–∏–π: 37
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–°–ø–∞—Å–∏–±–æ.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Zhuk72
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –≤–æ–ø—Ä–æ—Å –ø–æ mikroc
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç —Ñ–µ–≤ 03, 2017 06:14:23
–°–≤–µ—Ä–ª–∏—Ç —Ç–µ–∫—Å—Ç–æ–ª–∏—Ç –∫–æ–≥—Ç—è–º–∏
–ö–∞—Ä–º–∞: 25
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 168
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —è–Ω–≤ 29, 2014 08:41:31–°–æ–æ–±—â–µ–Ω–∏–π: 1231–û—Ç–∫—É–¥–∞: –ë–∞–∫—É
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–°—Ç–µ–∫ –≤—ã—Å–≤–æ–±–æ–∂–¥–∞–µ—Ç—Å—è –ø—Ä–∏ –≤–æ–∑–≤—Ä–∞—Ç–µ –∏–∑ —Ñ—É–Ω–∫—Ü–∏–∏. –í—ã –∂–µ –Ω–µ –ø–ª–∞–Ω–∏—Ä—É–µ—Ç–µ —Å–∏–¥–µ—Ç—å –≤ –Ω–µ–π –≤–µ—á–Ω–æ, –≤–µ—Ä–Ω–æ? –ó–∞–Ω—è–ª–∏ –æ–¥–Ω—É (–≤–µ—Ä—Ö–Ω—é—é) –ø–æ–∑–∏—Ü–∏—é –≤ —Å—Ç–µ–∫–µ, –∑–∞—à–ª–∏ –≤ –ü–ü, —Å–¥–µ–ª–∞–ª–∏ —Å–≤–æ–µ –¥–µ–ª–æ, –ø—Ä–∏ –≤—ã—Ö–æ–¥–µ –∑–∞–±—Ä–∞–ª–∏ –∞–¥—Ä–µ—Å –∏–∑ —Å—Ç–µ–∫–∞. –ù–æ –µ—Å–ª–∏ –≤—ã –∏–∑ —ç—Ç–æ–π —Ñ—É–Ω–∫—Ü–∏–∏ –ø–æ–ª–µ–∑–µ—Ç–µ –≤ –¥—Ä—É–≥—É—é (–µ—â—ë –æ–¥–Ω–∞ –ø–æ–∑–∏—Ü–∏—è), –∞ –∏–∑ —Ç–æ–π –ø–æ—Ç–æ–º –≤ —Å–ª–µ–¥—É—é—â—É—é –∏ –µ—â–µ, –∏ –µ—â—ë, —Ç–æ, –≤ –∑–∞–≤–∏—Å–∏–º–æ—Å—Ç–∏ –æ—Ç –≥–ª—É–±–∏–Ω—ã —Å—Ç–µ–∫–∞ –∫–æ–Ω–∫—Ä–µ—Ç–Ω–æ–≥–æ –ú–ö, –∏–º–µ–µ—Ç–µ —à–∞–Ω—Å –ø–µ—Ä–µ–ø–æ–ª–Ω–∏—Ç—å –µ–≥–æ, —Ç.–µ. –ø–æ—Ç–µ—Ä—è—Ç—å —Å–∞–º—ã–π –Ω–∏–∂–Ω–∏–π –≤ —Å—Ç–æ–ø–∫–µ –∞–¥—Ä–µ—Å –≤–æ–∑–≤—Ä–∞—Ç–∞.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
ds3ds3
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –≤–æ–ø—Ä–æ—Å –ø–æ mikroc
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç —Ñ–µ–≤ 03, 2017 06:21:29
–ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É!
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –Ω–æ—è 21, 2012 02:55:37–°–æ–æ–±—â–µ–Ω–∏–π: 37
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–î–∞. –ù–æ —É –º–µ–Ω—è –æ–ø–µ—Ä–∞—Ç–∏–≤–∫–∏ –Ω–µ —Ö–≤–∞—Ç–∞–µ—Ç –ø–æ–¥ —Å—Ç—ç–∫. –ú–æ–∂–Ω–æ –ø–æ–¥—Å–æ–∫—Ä–∞—Ç–∏—Ç—å –≥–ª—É–±–∏–Ω—É. –ï—Å—Ç—å —Ñ—É–Ω–∫—Ü–∏–∏ –≤—ã–∑—ã–≤–∞–µ–º—ã–µ –æ–¥–∏–Ω —Ä–∞–∑. –ù—É–∂–Ω–æ –∑–∞–º–µ–Ω–∏—Ç—å –∏—Ö, –æ—Å—Ç–∞–≤–∏–≤ –º–æ–¥—É–ª—å–Ω–æ—Å—Ç—å –∏ —É–¥–æ–±—Å—Ç–≤–æ. –ö–∞–∫–∏–µ –±—ã–≤–∞—é—Ç –º–µ—Ç–æ–¥—ã?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
ds3ds3
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –≤–æ–ø—Ä–æ—Å –ø–æ mikroc
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç —Ñ–µ–≤ 07, 2017 02:51:24
–ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É!
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –Ω–æ—è 21, 2012 02:55:37–°–æ–æ–±—â–µ–Ω–∏–π: 37
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
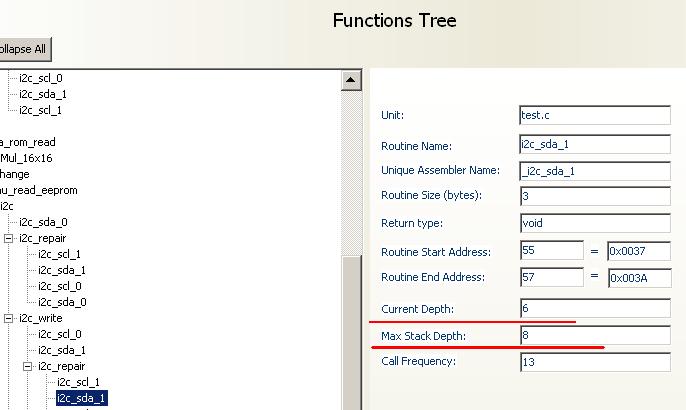
–ê –∑–Ω–∞–µ—Ç –∫—Ç–æ-–Ω–∏–±—É–¥—å –∫–∞–∫ MikroC –≤—ã—á–∏—Å–ª—è–µ—Ç Max Stack Depth?
–ó–¥–µ—Å—å —è —Ç–∫–Ω—É–ª –ü–ü —Å –Ω–∞–∏–±–æ–ª—å—à–µ–π –≥–ª—É–±–∏–Ω–æ–π ("—Ç–µ–∫—É—â–∞—è") —Ä–∞–≤–Ω–æ–π 6.
–ö–∞–∫ –ø–æ–ª—É—á–∞–µ—Ç—Å—è —á–∏—Å–ª–æ 8?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Zhuk72
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –≤–æ–ø—Ä–æ—Å –ø–æ mikroc
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç —Ñ–µ–≤ 07, 2017 06:03:12
–°–≤–µ—Ä–ª–∏—Ç —Ç–µ–∫—Å—Ç–æ–ª–∏—Ç –∫–æ–≥—Ç—è–º–∏
–ö–∞—Ä–º–∞: 25
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 168
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —è–Ω–≤ 29, 2014 08:41:31–°–æ–æ–±—â–µ–Ω–∏–π: 1231–û—Ç–∫—É–¥–∞: –ë–∞–∫—É
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–æ–∂–µ—Ç –≤ –Ω–∞—Å—Ç—Ä–æ–π–∫–∞—Ö –ø—Ä–æ–µ–∫—Ç–∞ –≤—ã—Å—Ç–∞–≤–ª—è–µ—Ç—Å—è?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
ds3ds3
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –≤–æ–ø—Ä–æ—Å –ø–æ mikroc
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç —Ñ–µ–≤ 10, 2017 05:35:47
–ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É!
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –Ω–æ—è 21, 2012 02:55:37–°–æ–æ–±—â–µ–Ω–∏–π: 37
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–£ –º–µ–Ω—è –ø–æ—á–µ–º—É-—Ç–æ —Ç—Ä–µ–±—É–µ—Ç—Å—è –ø–∞–º—è—Ç–∏ –ø–æ–¥ —Å—Ç—ç–∫ –Ω–∞ –¥–≤–∞ –±–∞–π—Ç–∞ –±–æ–ª—å—à–µ —á–µ–º —Ä–∞—Å—Å—á–∏—Ç–∞–Ω–æ.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
ARV
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –≤–æ–ø—Ä–æ—Å –ø–æ mikroc
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç —Ñ–µ–≤ 10, 2017 08:24:10
–£–º, —á–µ—Å—Ç—å –∏ —Å–æ–≤–µ—Å—Ç—å. –ò —Å–∫—Ä–æ–º–Ω–æ—Å—Ç—å.
–ö–∞—Ä–º–∞: 98
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2116
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –¥–µ–∫ 28, 2006 08:19:56–°–æ–æ–±—â–µ–Ω–∏–π: 18399–û—Ç–∫—É–¥–∞: –ù–æ–≤–æ—á–µ—Ä–∫–∞—Å—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 2
ds3ds3 –ø–∏—Å–∞–ª(–∞):
–í–æ–ø—Ä–æ—Å —á—Ç–æ —è –µ—â–µ –Ω–µ —É—á–µ–ª?
–º–æ–∂–µ—Ç –±—ã—Ç—å –µ—â–µ 2 –±–∞–π—Ç–∞ –Ω–∞
call main –Ω–µ —É—á–ª–∏?
–µ—Å–ª–∏ —Ä–∞—Å—Å–º–∞—Ç—Ä–∏–≤–∞—Ç—å —á–µ–ª–æ–≤–µ–∫–∞ —Å–Ω–∏–∑—É, –ø–æ–∫–∞–∂–µ—Ç—Å—è, —á—Ç–æ –º–æ–∑–≥ —É –Ω–µ–≥–æ –≥–ª—É–±–æ–∫–æ –≤ –∂–æ–ø–µ–ú–æ–π —É—é—Ç–Ω—ã–π –±–ª–æ–∂–∏–∫ ... –∑–∞—Ö–æ–¥–∏—Ç–µ!
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
ds3ds3
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –≤–æ–ø—Ä–æ—Å –ø–æ mikroc
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –º–∞—Ä 02, 2017 03:59:40
–ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É!
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –Ω–æ—è 21, 2012 02:55:37–°–æ–æ–±—â–µ–Ω–∏–π: 37
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
https://web.archive.org/web/20160421205 ... s/8051.htm –ü–æ–¥—Å–∫–∞–∂–∏—Ç–µ –ø–æ —Å–∫–æ—Ä–æ—Å—Ç–∏ UART, —á—Ç–æ —Ç–æ –Ω–µ —Å—Ö–æ–¥–∏—Ç—Å—è.
–í —Ç–∞–±–ª–∏—á–∫–∞—Ö –Ω–∞–ø–∏—Å–∞–Ω–æ —á—Ç–æ —Å–∫–æ—Ä–æ—Å—Ç—å 19,2 –∫–ì—Ü —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É–µ—Ç 0FDh –≤ 8 –±–∏—Ç–Ω–æ–º —Ç–∞–π–º–µ—Ä–µ –ø—Ä–∏ (1/11,059 –ú–ì—Ü)*12 –º–∞—à–∏–Ω–Ω–æ–≥–æ —Ü–∏–∫–ª–∞.
–¢.–µ. —Ç–∞–π–º–µ—Ä –Ω–∞ 3 —Ü–∏–∫–ª–∞ = 3,26 –º–∫—Å; –∞ 19,2 –∫–ì—Ü => 52,08 –º–∫—Å –≤–µ—Å—å –ø–µ—Ä–∏–æ–¥. 52,08/3,26 = 16 –ø—Ä–∏–º–µ—Ä–Ω–æ.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 3 –∏–∑ 4
[ –°–æ–æ–±—â–µ–Ω–∏–π: 62 ]
, , ,
–ö—Ç–æ —Å–µ–π—á–∞—Å –Ω–∞ —Ñ–æ—Ä—É–º–µ
–°–µ–π—á–∞—Å —ç—Ç–æ—Ç —Ñ–æ—Ä—É–º –ø—Ä–æ—Å–º–∞—Ç—Ä–∏–≤–∞—é—Ç: –Ω–µ—Ç –∑–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω–Ω—ã—Ö –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª–µ–π –∏ –≥–æ—Å—Ç–∏: 43
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –Ω–∞—á–∏–Ω–∞—Ç—å —Ç–µ–º—ã–Ω–µ –º–æ–∂–µ—Ç–µ –æ—Ç–≤–µ—á–∞—Ç—å –Ω–∞ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ —É–¥–∞–ª—è—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ –¥–æ–±–∞–≤–ª—è—Ç—å –≤–ª–æ–∂–µ–Ω–∏—è







")