|
–§–æ—Ä—É–º –Ý–∞–¥–∏–æ–ö–æ—Ç • –ü—Ä–æ—Å–º–æ—Ç—Ä —Ç–µ–º—ã - –õ–∞–∑–µ—Ä–Ω–∞—è —É—Å—Ç–∞–Ω–æ–≤–∫–∞ –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ –æ—Ç AlphaCrow
–°–æ–æ–±—â–µ–Ω–∏—è –±–µ–∑ –æ—Ç–≤–µ—Ç–æ–≤ | –ê–∫—Ç–∏–≤–Ω—ã–µ —Ç–µ–º—ã
 
|
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 93 –∏–∑ 507
|
[ –°–æ–æ–±—â–µ–Ω–∏–π: 10133 ] |
... , , , , , , ... |
| –ê–≤—Ç–æ—Ä |
–°–æ–æ–±—â–µ–Ω–∏–µ |
Vovan_a

|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏.  –î–æ–±–∞–≤–ª–µ–Ω–æ: –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –º–∞—Ä 09, 2016 19:38:46 |
|
| –ü—Ä–æ—Ä–µ–∑–∞–ª–∏—Å—å –∑—É–±—ã |
–ö–∞—Ä–º–∞: -4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 8
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –∞–≤–≥ 12, 2012 20:02:01
–°–æ–æ–±—â–µ–Ω–∏–π: 229
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ê –∫–∞–∫–æ–π –¥–ª–∏–Ω—ã –∏—Å–ø–æ–ª—å–∑—É–µ—Ç–µ —Ç–µ–ª–µ—Å–∫–æ–ø–∏—á–µ—Å–∫–∏–µ –Ω–∞–ø—Ä–∞–≤–ª—è—é—â–∏–µ?
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
 |
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
mial
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –º–∞—Ä 09, 2016 21:57:53 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
 |
–ö–∞—Ä–º–∞: 95
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2204
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —è–Ω–≤ 06, 2010 23:31:56
–°–æ–æ–±—â–µ–Ω–∏–π: 3254
–û—Ç–∫—É–¥–∞: –ë–æ—Ä–æ–≤–∏—á–∏, –ù–æ–≤–≥. –æ–±–ª.
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 1
")
|
–î–∞–≤–Ω–µ–Ω—å–∫–æ –±—ã–ª–∞ –∫—É–ø–ª–µ–Ω–∞ –®–í–ü1204. –•–æ—Ç–µ–ª –µ–µ –ø–æ—Å—Ç–∞–≤–∏—Ç—å –Ω–∞ –Ω–æ–≤—É—é —É—Å—Ç–∞–Ω–æ–≤–∫—É. –ù–æ –ø–æ–∫–∞ —Å —Ñ–∏–Ω–∞–Ω—Å–∞–º–∏ —Ç—É–≥–æ, –Ω–µ –ø–æ–ª—É—á–∞–µ—Ç—Å—è –Ω–∞—á–∞—Ç—å. –ü–æ—Å—Ç–∞–≤–∏–ª —ç—Ç–æ—Ç –≤–∏–Ω—Ç –∑–∞–º–µ—Å—Ç–æ —Ç–µ–∫—É—â–µ–≥–æ –ú8. –ú–∏–∫—Ä–æ—à–∞–≥ –≤—ã—Å—Ç–∞–≤–∏–ª 1/8. –ü–æ–ª—É—á–∏–ª–æ—Å—å –∫–∞–∫ —É –∞–≤—Ç–æ—Ä–∞, 400 –∏–º–ø. –Ω–∞ 1 –º–º. –ü–æ –∑–≤—É–∫—É –∫–∞–∫ –≤—Ä–æ–¥–µ –ø–æ –ø—Ä–∏—è—Ç–Ω–µ–π —Ä–∞–±–æ—Ç–∞–µ—Ç. –¢–æ—á–Ω–æ—Å—Ç—å, –≤—Ä–æ–¥–µ —Ç–æ–∂–µ –Ω–∏—á–µ–≥–æ –Ω–µ –∏–∑–º–µ–Ω–∏–ª–æ—Å—å. –õ—é—Ñ—Ç–æ–≤ –Ω–µ—Ç. –ü–æ–ø—Ä–æ–±—É—é –Ω–∞ —Å–ª–µ–¥—É—é—â–µ–π –ø–ª–∞—Ç–µ, –∏–∑–º–µ–Ω–∏—Ç—Å—è —á—Ç–æ, –∏–ª–∏ –Ω–µ—Ç. 
_________________
–ü—Ä–æ—Ç–æ—Ç–∏–ø—ã –ø–µ—á–∞—Ç–Ω—ã—Ö –ø–ª–∞—Ç –Ω–∞ –∑–∞–∫–∞–∑ https://radiokot.ru/forum/viewtopic.php?f=54&t=122701
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
vilkin
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –º–∞—Ä 10, 2016 21:01:30 |
|
| –û—Ç–∫—Ä—ã–ª –≥–ª–∞–∑–∞ |
 |
–ö–∞—Ä–º–∞: 6
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 14
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –º–∞–π 23, 2010 11:54:59
–°–æ–æ–±—â–µ–Ω–∏–π: 69
–û—Ç–∫—É–¥–∞: –ú–æ—Å–∫–≤–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
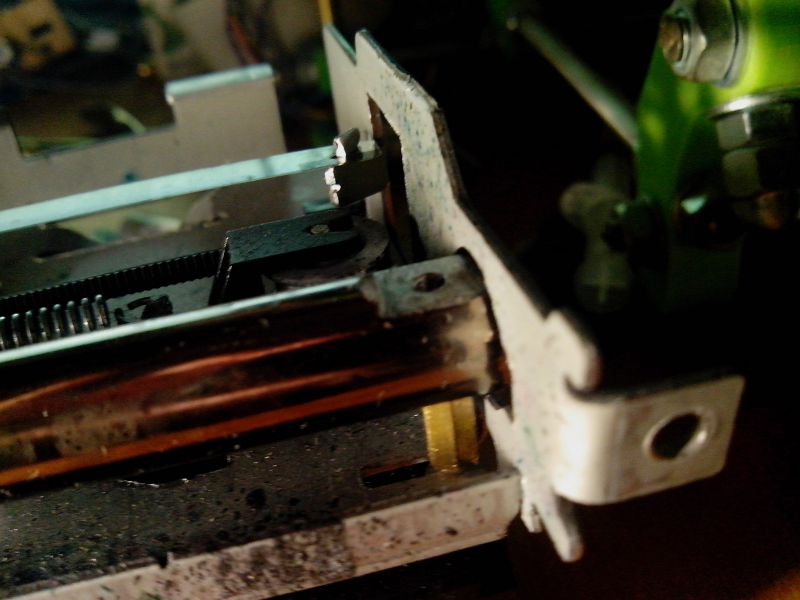
–ö—Ç–æ-–Ω–∏–±—É–¥—å –¥–µ–ª–∞–ª –∫–∞—Ä–µ—Ç–∫—É –Ω–∞ –∂–µ–ª–µ–∑–µ –æ—Ç –ø—Ä–∏–Ω—Ç–µ—Ä–∞ HP 920C? –ü–æ–ª—É—á–∏–ª–æ—Å—å –Ω–∞—Å—Ç—Ä–æ–∏—Ç—å? –ù–µ –º–æ–≥—É –Ω–∏–∫–∞–∫ –ü–ò–î –Ω–∞—Å—Ç—Ä–æ–∏—Ç—å... —Ç—Ä–µ—â–∏—Ç, –¥–µ—Ä–≥–∞–µ—Ç—Å—è. –ß—É—Ç—å –ø–æ—Ö–æ–∂–µ –Ω–∞ –ø—Ä–∞–≤–¥—É –ø–æ–ª—É—á–∞–µ—Ç—Å—è –ø—Ä–∏ –≤—Å–µ—Ö —Ä–µ–≥—É–ª—è—Ç–æ—Ä–∞—Ö –≤—ã–∫—Ä—É—á–µ–Ω–Ω—ã—Ö –≤ –Ω–æ–ª—å. –ù–µ–º–Ω–æ–≥–æ –º–æ–∂–Ω–æ –ø–æ–¥–Ω—è—Ç—å –ø—Ä–æ–ø–æ—Ä—Ü–∏–æ–Ω–∞–ª—å–Ω—ã–π, –∞ –¥–∞–ª—å—à–µ –Ω–∞—á–∏–Ω–∞–µ—Ç—Å—è –ø–∏–ª–∞ –∑—É–±–∞—Å—Ç–∞—è –Ω–∞ –≥—Ä–∞—Ñ–∏–∫–µ —Å —Ç—Ä–µ—Å–∫–æ–º... –ü—Ä–∏ –º–∞–ª–µ–π—à–µ–º —Å–¥–≤–∏–≥–µ –∏–Ω—Ç–µ–≥—Ä–∞–ª—å–Ω–æ–≥–æ —Ä–µ–≥—É–ª—è—Ç–æ—Ä–∞ –Ω–∞ 0.001 –Ω–∞—á–∏–Ω–∞—é—Ç—Å—è –¥–ª–∏—Ç–µ–ª—å–Ω—ã–µ –∑–∞–º–∏—Ä–∞–Ω–∏—è –¥–≤–∏–∂–µ–Ω–∏—è –∫–∞—Ä–µ—Ç–∫–∏ —Å –ø–æ—Å–ª–µ–¥—É—é—â–∏–º —Ä–µ–∑–∫–∏–º —Å—Ä—ã–≤–æ–º –∏ –∫—Ä–∞—Ç–∫–æ–≤—Ä–µ–º–µ–Ω–Ω—ã–º –¥–≤–∏–∂–µ–Ω–∏–µ–º. –ù–∞–ø—Ä–∞–≤–ª—è—é—â–∞—è —Å–º–∞–∑–∞–Ω–Ω–∞—è. –Ý—É–∫–∞–º–∏ –¥–≤–∏–≥–∞–µ—Ç—Å—è –ª–µ–≥–∫–æ. –õ—é—Ñ—Ç –Ω–µ —Å–∏–ª—å–Ω–æ –±–æ–ª—å—à–æ–π. –ù–∞–ø—Ä—è–∂–µ–Ω–∏–µ —Å–¥–≤–∏–≥–∞ –∫–∞—Ä–µ—Ç–∫–∏ 4.2 –≤–æ–ª—å—Ç–∞. –ñ–µ–ª–µ–∑–æ –∫–∞–∫ –Ω–∞ —ç—Ç–æ–º —Ñ–æ—Ç–æ –°–ø–æ–π–ª–µ—Ä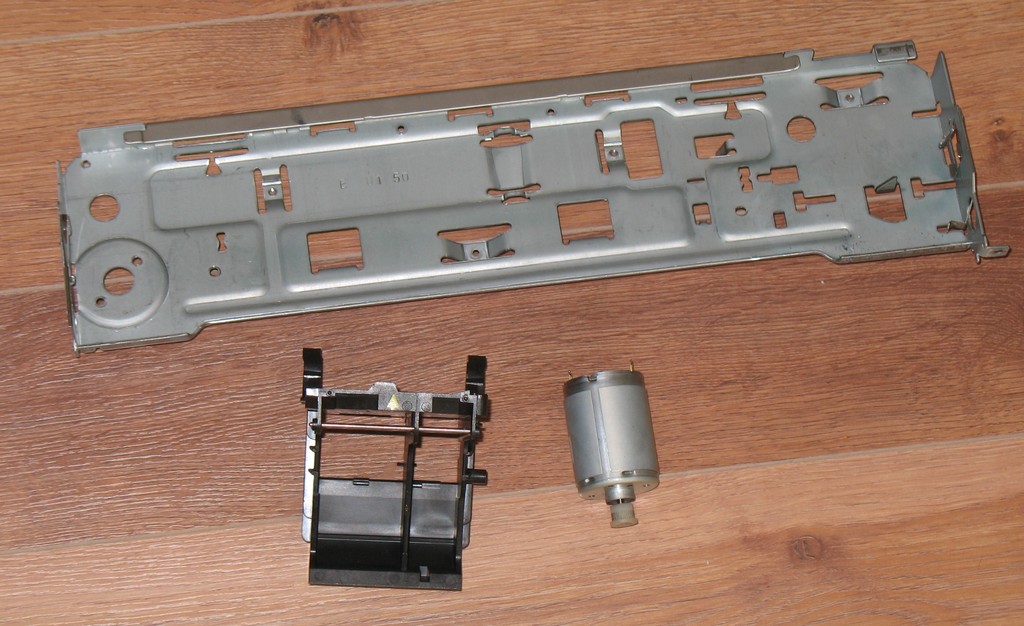
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Markusha
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –º–∞—Ä 10, 2016 21:05:36 |
|
| –ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É! |
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –∏—é–ª 23, 2015 17:33:48
–°–æ–æ–±—â–µ–Ω–∏–π: 34
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
vilkin –ø–∏—Å–∞–ª(–∞): HP 920C –ê –∫–∞–∫ –≤—ã –≤–∞–ª –∑–∞–∫—Ä–µ–ø–∏–ª–∏, —á—Ç–æ–± –Ω–µ –±–æ–ª—Ç–∞–ª—Å—è? –Ø –∏–∑ –∑–∞ —Ç–æ–≥–æ —á—Ç–æ —Ç–∞–º –≤–∞–ª –µ—â–µ –Ω–∞ 2 –≤–∏–Ω—Ç–∞ –∫—Ä–µ–ø–∏—Ç—Å—è –µ–≥–æ –∑–∞–±—Ä–∞–∫–æ–≤–∞–ª. –ë–æ–ª—Ç–∞–µ—Ç—Å—è, —Å–æ–±–∞–∫–∞ 
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
vilkin
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –º–∞—Ä 10, 2016 21:21:21 |
|
| –û—Ç–∫—Ä—ã–ª –≥–ª–∞–∑–∞ |
|
–ö–∞—Ä–º–∞: 6
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 14
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –º–∞–π 23, 2010 11:54:59
–°–æ–æ–±—â–µ–Ω–∏–π: 69
–û—Ç–∫—É–¥–∞: –ú–æ—Å–∫–≤–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 1
|
Markusha –ø–∏—Å–∞–ª(–∞): –ê –∫–∞–∫ –≤—ã –≤–∞–ª –∑–∞–∫—Ä–µ–ø–∏–ª–∏, —á—Ç–æ–± –Ω–µ –±–æ–ª—Ç–∞–ª—Å—è? –Ø –ø—Ä–æ–¥–µ–ª–∞–ª –¥—Ä—É–≥–∏–µ –æ—Ç–≤–µ—Ä—Å—Ç–∏—è –ø–æ–¥ –≤–∏–Ω—Ç—ã... –ö–æ–Ω—Ü—ã –≤–∞–ª–∞ –æ–±—Ä–∞–±–æ—Ç–∞–ª –¥—Ä–µ–º–µ–ª–µ–º, –ø—Ä–æ—Å–≤–µ—Ä–ª–∏–ª –Ω–∞—Å–∫–≤–æ–∑—å, –Ω–∞—Ä–µ–∑–∞–ª —Ä–µ–∑—å–±—É M3 –∏ –≤–∫—Ä—É—Ç–∏–ª —Å—Ç–æ–π–∫–∏ –ª–∞—Ç—É–Ω–Ω—ã–µ. –°–∞–º–∏ —Å—Ç–æ–π–∫–∏ –ø—Ä–∏–∫—Ä—É—Ç–∏–ª –∫ —Å—Ç–∞–Ω–∏–Ω–µ. –ü–æ–ª—É—á–∏–ª–æ—Å—å –Ω–∞–¥–µ–∂–Ω–æ –∏ –∂–µ—Å—Ç–∫–æ. 
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
Markusha
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –º–∞—Ä 10, 2016 21:29:39 |
|
| –ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É! |
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –∏—é–ª 23, 2015 17:33:48
–°–æ–æ–±—â–µ–Ω–∏–π: 34
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
vilkin –ø–∏—Å–∞–ª(–∞): ... –ú–¥–∞.. –°–ø–∞—Å–∏–±–æ, –æ–¥–Ω–∞–∫–æ. –Ø —Ç–æ –ø–æ—Å—á–∏—Ç–∞–ª —á—Ç–æ –µ—Å–ª–∏ –≤–∞–ª –Ω–µ –±–µ—Ä–µ—Ç –Ω–∞–ø–∏–ª—å–Ω–∏–∫ - –Ω–µ –≤—ã–π–¥–µ—Ç –æ–±—Ä–∞–±–æ—Ç–∞—Ç—å, —Ç–∞–∫ –∫–∞–∫ –∫–∞–ª–µ–Ω—ã–π. –ê –æ–Ω–æ –≤–æ—Ç –∫–∞–∫, –Ω—É, –±—É–¥–µ–º –ø–æ–ø—Ä–æ–±–æ–≤–∞—Ç—å 
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
vilkin
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –º–∞—Ä 10, 2016 21:36:38 |
|
| –û—Ç–∫—Ä—ã–ª –≥–ª–∞–∑–∞ |
|
–ö–∞—Ä–º–∞: 6
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 14
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –º–∞–π 23, 2010 11:54:59
–°–æ–æ–±—â–µ–Ω–∏–π: 69
–û—Ç–∫—É–¥–∞: –ú–æ—Å–∫–≤–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ó–∞–∫–∞–ª–∫–∞ –Ω–∞ –≤–∞–ª—É –æ—á–µ–Ω—å –Ω–µ –≥–ª—É–±–æ–∫–∞—è.
–ù–∞ –¥—Ä–µ–º–µ–ª—å –Ω–∞—Å–∞–¥–∏–ª –æ—Ç—Ä–µ–∑–Ω–æ–π –∫—Ä—É–≥ —Å–¥–µ–ª–∞–Ω–Ω—ã–π –∏–∑ –∫—Ä—É–≥–∞ –æ—Ç –±–æ–ª–≥–∞—Ä–∫–∏... –Ω–æ–∂–Ω–∏—Ü–∞–º–∏ –≤—ã—Ä–µ–∑–∞–ª –∏–∑ –±–æ–ª—å—à–æ–≥–æ –º–∞–ª–µ–Ω—å–∫–∏–π.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
bars
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –º–∞—Ä 10, 2016 22:02:31 |
|
| –ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É! |
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å —Ñ–µ–≤ 01, 2009 21:08:46
–°–æ–æ–±—â–µ–Ω–∏–π: 31
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ü–æ–¥—Å–∫–∞–∂–∏—Ç–µ, –∞ —Å–∫–æ–ª—å–∫–æ —É –≤–∞—Å —à–∏—Ä–∏–Ω–∞ –æ—Å–∏ –ø–æ –∫–æ—Ç–æ—Ä–æ–π –∫–∞—Ç–∞–µ—Ç—Å—è –∫–∞—Ä–µ—Ç–∫–∞? –ü—Ä–æ—Å—Ç —Ö–æ—á—É —Å–æ–±—Ä–∞—Ç—å –º–µ—Ö–∞–Ω–∏–∫—É —Å –Ω—É–ª—è, –µ—Å—Ç—å –æ—Ç–¥–µ–ª—å–Ω–æ —ç–Ω–∫–æ–¥–µ—Ä–Ω–∞—è –ª–µ–Ω—Ç–∞ –∏ —Å–∞–º —ç–Ω–∫–æ–¥–µ—Ä –¥–ª—è –Ω–µ–µ (–≤ —Å–≤–æ–µ –≤—Ä–µ–º—è –æ—Å—Ç–∞–ª–∏—Å—å –ø–æ—Å–ª–µ —Ä–∞–∑–±–æ—Ä–∞ —à–∏—Ä–æ–∫–æ—Ñ–æ—Ä–º–∞—Ç–Ω–∏–∫–∞ –ê1).
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
vilkin
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –º–∞—Ä 10, 2016 22:12:45 |
|
| –û—Ç–∫—Ä—ã–ª –≥–ª–∞–∑–∞ |
|
–ö–∞—Ä–º–∞: 6
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 14
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –º–∞–π 23, 2010 11:54:59
–°–æ–æ–±—â–µ–Ω–∏–π: 69
–û—Ç–∫—É–¥–∞: –ú–æ—Å–∫–≤–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
40—Å–º –≤–º–µ—Å—Ç–µ —Å –∑–æ–Ω–æ–π –ø–∞—Ä–∫–æ–≤–∫–∏, –Ω–æ —Ç—É–¥–∞ –Ω–µ –∑–∞–µ–∑–∂–∞–µ—Ç. –ú–æ–∂–Ω–æ –æ—Ç—Ä–µ–∑–∞—Ç—å –µ—â–µ 5 —Å–º —Å–º–µ–ª–æ.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
vik_211
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –º–∞—Ä 11, 2016 18:51:36 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –Ω–æ—è 01, 2012 20:51:23
–°–æ–æ–±—â–µ–Ω–∏–π: 54
–û—Ç–∫—É–¥–∞: –£–∫—Ä–∞–∏–Ω–∞, –ß–µ—Ä–∫–∞—Å—Å—ã
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ê –∫—Ç–æ —Ç–æ –∏—Å–ø–æ–ª—å–∑—É–µ—Ç –ª–∞–∑–µ—Ä–Ω—ã–π –º–æ–¥—É–ª—å —Å —Ä–æ–¥–Ω—ã–º –¥—Ä–∞–π–≤–µ—Ä–æ–º, –∏–ª–∏ –Ω–µ —Ö–≤–∞—Ç–∏—Ç –±—ã—Å—Ç—Ä–æ–¥–µ–π—Å—Ç–≤–∏—è?
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
motoAnDrEY14
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –º–∞—Ä 11, 2016 19:52:56 |
|
| –í—Å—Ç–∞–ª –Ω–∞ –ª–∞–ø—ã |
 |
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 27
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –º–∞—Ä 06, 2009 15:29:27
–°–æ–æ–±—â–µ–Ω–∏–π: 93
–û—Ç–∫—É–¥–∞: –ú–∏–Ω—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ù–µ–∞, —Ç–∞–º –∫–æ–Ω–¥—ë—Ä—ã, –Ω–µ –±—É–¥–µ—Ç —Ä–∞–±–æ—Ç–∞—Ç—å.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Neekeetos
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –º–∞—Ä 13, 2016 08:15:43 |
|
| –î–µ—Ä–∂–∏—Ç –ø–∞—è–ª—å–Ω–∏–∫ —Ö–≤–æ—Å—Ç–æ–º |
 |
–ö–∞—Ä–º–∞: 20
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 245
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü–Ω —Å–µ–Ω 18, 2006 11:16:05
–°–æ–æ–±—â–µ–Ω–∏–π: 993
–û—Ç–∫—É–¥–∞: –¢—É–ª–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–ü—Ä–∏–≤–µ—Ç—Å—Ç–≤—É—é, –Ø –Ω–µ–º–Ω–æ–≥–æ –ø–∏—Å–∞–ª –≤ —Ç–µ–º–µ –ø—Ä–æ –ø—Ä–∏–Ω—Ç–µ—Ä , –∫–æ—Ç–æ—Ä—ã–π –ø–µ—Ä–µ–¥–µ–ª—ã–≤–∞—é. –í –æ–±—â–µ–º —Ö–æ—Ç–µ–ª –ø–æ –º–∞–∫—Å–∏–º—É–º—É –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å —Ç–æ —á—Ç–æ –≤ –Ω–µ–º –Ω–∞—Ö–æ–¥–∏—Ç—Å—è, –ø–æ—ç—Ç–æ–º—É —Ä–∞–∑–æ–±—Ä–∞–ª—Å—è —Å —Ä–æ–¥–Ω–æ–π –ø–ª–∞—Ç–æ–π —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è. –¢–∞–º –∏—Å–ø–æ–ª—å–∑—É–µ—Ç—Å—è –º–Ω–æ–≥–æ–∫–∞–Ω–∞–ª—å–Ω—ã–π –¥—Ä–∞–π–≤–µ—Ä –¥–≤–∏–≥–∞—Ç–µ–ª–µ–π, –≤ –º–æ–µ–º —Å–ª—É—á–∞–µ –∑–∞–¥–µ–π—Å—Ç–≤–æ–≤–∞–Ω—ã 3 –∫–∞–Ω–∞–ª–∞ –∏–∑ 4, –ø–ª—é—Å –≤ –¥—Ä–∞–π–≤–µ—Ä –≤—Å—Ç—Ä–æ–µ–Ω—ã –∏–º–ø—É–ª—å—Å–Ω—ã–µ –ø–æ–Ω–∏–∂–∞—é—â–∏–µ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ç–æ—Ä—ã (3—à—Ç), –∫–æ—Ç–æ—Ä—ã–µ –º–æ–∂–Ω–æ –Ω–∞—Å—Ç—Ä–æ–∏—Ç—å –≤–Ω–µ—à–Ω–∏–º–∏ –¥–µ–ª–∏—Ç–µ–ª—è–º–∏ –Ω–∞ –ø—Ä–æ–∏–∑–≤–æ–ª—å–Ω–æ–µ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ. –°–∞–º –¥—Ä–∞–π–≤–µ—Ä –∑–∞–ø–∏—Ç–∞–Ω –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ–º 32–í –∏ –≤ –ø—Ä–∏–Ω—Ç–µ—Ä–µ —Ñ–æ—Ä–º–∏—Ä—É–µ—Ç –Ω–∞–ø—Ä—è–∂–µ–Ω–∏—è –ø–∏—Ç–∞–Ω–∏—è 1.8 3.3 –∏ 5–í. –î–ª—è —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è –∫–∞–∂–¥—ã–º –∏–∑ –¥–≤–∏–≥–∞—Ç–µ–ª–µ–π –∏—Å–ø–æ–ª—å–∑—É–µ—Ç—Å—è –¥–≤–∞ —Å–∏–≥–Ω–∞–ª–∞ - EN, PHASE , –ø—Ä–∏—á–µ–º —à–∏–º –º–æ–∂–Ω–æ –æ—Å—É—â–µ—Å—Ç–≤–ª—è—Ç—å —Ç–æ–ª—å–∫–æ –ø–æ –≤—Ö–æ–¥—É PHASE, –≤—Ö–æ–¥ EN –Ω–∏–∑–∫–æ—Å–∫–æ—Ä–æ—Å—Ç–Ω–æ–π, –ø–æ—ç—Ç–æ–º—É —Å–∏–≥–Ω–∞–ª—É —à–∏–º 50% —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É–µ—Ç –Ω—É–ª–µ–≤–æ–π —Ç–æ–∫ —á–µ—Ä–µ–∑ –¥–≤–∏–≥–∞—Ç–µ–ª—å , 0% –∏ 100% —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—Ç -V –∏ +V –Ω–∞ –¥–≤–∏–≥–∞—Ç–µ–ª–µ. –ö—Ä–æ–º–µ —Ç–æ–≥–æ –≤ –º–æ–º–µ–Ω—Ç –≤–∫–ª—é—á–µ–Ω–∏—è –ø–∏—Ç–∞–Ω–∏—è –¥—Ä–∞–π–≤–µ—Ä –¥–æ–ª–∂–µ–Ω –±—ã—Ç—å –ø—Ä–æ–∏–Ω–∏—Ü–∏–∞–ª–∏–∑–∏—Ä–æ–≤–∞–Ω - –∑–∞–¥–∞–µ—Ç—Å—è —Ä–µ–∂–∏–º –µ–≥–æ —Ä–∞–±–æ—Ç—ã, –≤–∫–ª—é—á–∞—é—Ç—Å—è —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ç–æ—Ä—ã –∏ –Ω—É–∂–Ω—ã–µ –≤—ã—Ö–æ–¥—ã. –≠—Ç–∞ –∏–Ω–∏—Ü–∏–∞–ª–∏–∑–∞—Ü–∏—è –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è –ø–æ –≤—Ö–æ–¥–∞–º PHASE –ø–µ—Ä–≤—ã—Ö –¥–≤—É—Ö –¥–≤–∏–≥–∞—Ç–µ–ª–µ–π , –æ–¥–∏–Ω –∏–∑ –∫–æ—Ç–æ—Ä—ã—Ö —Å—Ç–∞–Ω–æ–≤–∏—Ç—Å—è –ª–∏–Ω–∏–µ–π –¥–∞–Ω–Ω—ã—Ö, –≤—Ç–æ—Ä–æ–π - —Ç–∞–∫—Ç–∞–º–∏. –ï—â–µ –µ—Å—Ç—å –≥–ª–æ–±–∞–ª—å–Ω—ã–π –≤—Ö–æ–¥ –¥—Ä–∞–π–≤–µ—Ä–∞, –∫–æ—Ç–æ—Ä—ã–π –µ–≥–æ –≤–∫–ª—é—á–∞–µ—Ç/–≤—ã–∫–ª—é—á–∞–µ—Ç. –í –æ–±—â–µ–π —Å–ª–æ–∂–Ω–æ—Å—Ç–∏ –≤ –ø—Ä–∏–Ω—Ç–µ—Ä–µ –Ω—É–∂–Ω–æ —É–ø—Ä–∞–≤–ª—è—Ç—å –¥–≤—É–º—è –¥–≤–∏–≥–∞—Ç–µ–ª—è–º–∏ –∫–∞–∂–¥—ã–π –∏–∑ –∫–æ—Ç–æ—Ä—ã—Ö —Å–Ω–∞–±–∂–µ–Ω –æ–ø—Ç–∏—á–µ—Å–∫–∏–º —ç–Ω–∫–æ–¥–µ—Ä–æ–º. –¢–∞–∫–∞—è –≤–æ—Ç –æ–±—â–∞—è –∫–∞—Ä—Ç–∏–Ω–∞. –¢–µ–ø–µ—Ä—å –∫ –≤–æ–ø—Ä–æ—Å–∞–º –Ø —Ç–∞–∫ –Ω–µ–º–Ω–æ–≥–æ –ø–æ–ª–∏—Å—Ç–∞–ª –ø—Ä–æ—à–∏–≤–∫—É, –∏ –≤—Ä–æ–¥–µ —Å –∏–Ω–∏—Ü–∏–∞–ª–∏–∑–∞—Ü–∏–µ–π –¥—Ä–∞–π–≤–µ—Ä–∞ –ø–æ–Ω—è—Ç–Ω–æ —á—Ç–æ –¥–µ–ª–∞—Ç—å. –ù–æ –≤–æ—Ç –≤—Ç–æ—Ä–æ–π —ç–Ω–∫–æ–¥–µ—Ä –ø–æ –º–æ–µ–º—É —Ç—É–¥–∞ –ª–µ–≥–∫–æ –Ω–µ –≤–ø–∏—à–µ—Ç—Å—è, –≤—Å—è –ø—Ä–æ—à–∏–≤–∫–∞ –∑–∞–≤—è–∑–∞–Ω–∞ –Ω–∞ –æ–±—Ä–∞–±–æ—Ç–∫—É –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–π –ø–æ –µ–¥–∏–Ω—Å—Ç–≤–µ–Ω–Ω–æ–º—É —ç–Ω–∫–æ–¥–µ—Ä—É. –í–∏–¥–∏–º–æ –Ω—É–∂–Ω–æ –ø–æ–¥–∫–ª—é—á–∞—Ç—å —ç–Ω–∫–æ–¥–µ—Ä—ã –∫ –∞–ø–ø–∞—Ä–∞—Ç–Ω—ã–º –≤—Ö–æ–¥–∞–º —Ç–∞–π–º–µ—Ä–æ–≤ –≤ —Ä–µ–∂–∏–º–µ —ç–Ω–∫–æ–¥–µ—Ä–∞, –∏ –∑–∞—Ç–µ–º —Å —Ä–µ–≥—É–ª—è—Ä–Ω–æ–π —á–∞—Å—Ç–æ—Ç–æ–π –∏—Ö –æ—Ü–∏—Ñ—Ä–æ–≤—ã–≤–∞—Ç—å –¥–ª—è —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è –¥–≤–∏–≥–∞—Ç–µ–ª—è–º–∏, —ç—Ç–æ –ø–æ—Ç—Ä–µ–±—É–µ—Ç –±–æ–ª–µ–µ —Å–ª–æ–∂–Ω–æ–≥–æ —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è –ª–∞–∑–µ—Ä–æ–º, –Ω–∞–¥–æ –±—É–¥–µ—Ç –∫–∞—Å–∫–∞–¥–∏—Ä–æ–≤–∞—Ç—å —Ç–∞–π–º–µ—Ä—ã. –£—á–∏—Ç—ã–≤–∞—è –æ–±—ä–µ–º —Ç—Ä–µ–±—É–µ–º—ã—Ö –∏–∑–º–µ–Ω–µ–Ω–∏–π, –ø—Ä–æ—Å–∏—Ç—å –ø–æ–º–µ–Ω—è—Ç—å –ø—Ä–æ—à–∏–≤–∫—É –º–∫ —è –Ω–µ –æ—Å–º–µ–ª—é—Å—å, —Å–∞–º–æ—Å—Ç–æ—è—Ç–µ–ª—å–Ω–æ –¥–æ–ø–∏—à—É. –í–æ–ø—Ä–æ—Å –≤ —Ç–æ–º –∫–∞–∫ –±—ã –ø–æ–ª—É—á—à–µ —Å–¥–µ–ª–∞—Ç—å —á—Ç–æ–±—ã —ç—Ç–æ –≤—Å–µ –±—ã–ª–æ —Å–æ–≤–º–µ—Å—Ç–∏–º–æ —Å –≤–∞—à–µ–π —É–ø—Ä–∞–≤–ª—è—é—â–µ–π –ø—Ä–æ–≥—Ä–∞–º–º–æ–π –Ω–∞ –∫–æ–º–ø—å—é—Ç–µ—Ä–µ, –¥–∞ –∏ –≤–æ–æ–±—â–µ, –µ—Å–ª–∏ –µ—Å—Ç—å –∫–æ–º–º–µ–Ω—Ç–∞—Ä–∏–∏ –ø–æ —Ç–æ–º—É —á—Ç–æ —è –Ω–∞–ø–∏—Å–∞–ª
_________________
–ò–Ω—Ñ–æ—Ä–º–∞—Ü–∏—è –ø–æ RLC mini –Ω–∞—Ö–æ–¥–∏—Ç—Å—è >—Ç—É—Ç<
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Neekeetos
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –º–∞—Ä 13, 2016 16:32:54 |
|
| –î–µ—Ä–∂–∏—Ç –ø–∞—è–ª—å–Ω–∏–∫ —Ö–≤–æ—Å—Ç–æ–º |
|
–ö–∞—Ä–º–∞: 20
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 245
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü–Ω —Å–µ–Ω 18, 2006 11:16:05
–°–æ–æ–±—â–µ–Ω–∏–π: 993
–û—Ç–∫—É–¥–∞: –¢—É–ª–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
Neekeetos –ø–∏—Å–∞–ª(–∞): –¥–∞ –∏ –≤–æ–æ–±—â–µ, –µ—Å–ª–∏ –µ—Å—Ç—å –∫–æ–º–º–µ–Ω—Ç–∞—Ä–∏–∏ –ø–æ —Ç–æ–º—É —á—Ç–æ —è –Ω–∞–ø–∏—Å–∞–ª –ó–∞–±–∞–≤–Ω–æ –≤—ã—à–ª–æ, —Ö–æ—Ç–µ–ª –≤ –ª–∏—á–∫—É –∞ –æ–Ω–æ –≤–æ–Ω –∫–∞–∫ . –ù–æ —Ç–∞–∫ —Ç–æ–∂–µ –Ω–∏—á–µ–≥–æ. –ï—Å–ª–∏ —É –∫–æ–≥–æ –µ—Å—Ç—å –∏–¥–µ—è –ø–æ–¥–æ–±–Ω—ã–º –∂–µ –æ–±—Ä–∞–∑–æ–º –ø–µ—Ä–µ–¥–µ–ª–∞—Ç—å –ø—Ä–∏–Ω—Ç–µ—Ä –≤ —Ç—É–ª–µ, –º–æ–≥—É –ø–æ–º–æ—á—å —Å –∑–∞–ø–∏—Å—å—é –ø—Ä–æ—Ç–æ–∫–æ–ª–∞ –¥—Ä–∞–π–≤–µ—Ä–∞, –¥–ª—è —ç—Ç–æ–≥–æ –Ω—É–∂–µ–Ω –æ—Ç–Ω–æ—Å–∏—Ç–µ–ª—å–Ω–æ –∂–∏–≤–æ–π –ø—Ä–∏–Ω—Ç–µ—Ä, —è –∑–∞–ø–∏—à—É –ø—Ä–æ—Ç–æ–∫–æ–ª –∞–Ω–∞–ª–∏–∑–∞—Ç–æ—Ä–æ–º —á—Ç–æ —Ç–∞–º –ø–µ—Ä–µ–¥–∞–µ—Ç—Å—è –ø—Ä–∏ —Å—Ç–∞—Ä—Ç–µ, –ø–æ—Ç–æ–º –º–æ–∂–Ω–æ –±—É–¥–µ—Ç –≤ –ø—Ä–æ—à–∏–≤–∫—É –¥–æ–±–∞–≤–∏—Ç—å.
_________________
–ò–Ω—Ñ–æ—Ä–º–∞—Ü–∏—è –ø–æ RLC mini –Ω–∞—Ö–æ–¥–∏—Ç—Å—è >—Ç—É—Ç<
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
AlphaCrow
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –º–∞—Ä 13, 2016 21:05:44 |
|
| –í—Å—Ç–∞–ª –Ω–∞ –ª–∞–ø—ã |
 |
–ö–∞—Ä–º–∞: 38
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 471
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –∞–ø—Ä 29, 2011 13:01:00
–°–æ–æ–±—â–µ–Ω–∏–π: 127
–û—Ç–∫—É–¥–∞: –≥. –¢–∞–≥–∞–Ω—Ä–æ–≥, –Ý–æ—Å—Ç–æ–≤—Å–∫–æ–π –æ–±–ª.
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 8
|
–û—á–µ—Ä–µ–¥–Ω–∞—è –≤–µ—Ä—Å–∏—è HLDI. –í –æ—Å–Ω–æ–≤–Ω–æ–º –¥–ª—è —Ç–µ—Ö, —É –∫–æ–≥–æ –ø—Ä–æ–±–ª–µ–º—ã –∏–∑–æ–±—Ä–∞–∂–µ–Ω–∏—è —Å –∫–∞–º–µ—Ä. –í–ª–æ–∂–µ–Ω–∏–µ:
 HLDI_SW_057.7z [38.67 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 1477
HLDI_SW_057.7z [38.67 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 1477
Neekeetos –ë–ª–∞–≥–æ–µ –¥–µ–ª–æ –∑–∞–¥—É–º–∞–ª–∏. –ü—Ä–æ–±–ª–µ–º —Å —Å–æ–≤–º–µ—Å—Ç–∏–º–æ—Å—Ç—å—é –±—ã—Ç—å –Ω–µ –¥–æ–ª–∂–Ω–æ. –î–ª—è –¥–≤–∏–∂–µ–Ω–∏—è –∫–∞—Ä–µ—Ç–∫–∏ –∏–ª–∏ —Å—Ç–æ–ª–∞, –ø—Ä–æ–≥–∞ –ø–µ—Ä–µ–¥–∞—ë—Ç –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä—É –∫–æ–æ—Ä–¥–∏–Ω–∞—Ç—ã –∫–æ–Ω–µ—á–Ω–æ–π —Ç–æ—á–∫–∏, –∞ –∫–∞–∫ –¥–æ—Å—Ç–∏–≥–Ω—É—Ç—å –µ—ë, –¥—É–º–∞–µ—Ç —Å–∞–º –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä. Neekeetos –ø–∏—Å–∞–ª(–∞): "...–í–∏–¥–∏–º–æ –Ω—É–∂–Ω–æ –ø–æ–¥–∫–ª—é—á–∞—Ç—å —ç–Ω–∫–æ–¥–µ—Ä—ã –∫ –∞–ø–ø–∞—Ä–∞—Ç–Ω—ã–º –≤—Ö–æ–¥–∞–º —Ç–∞–π–º–µ—Ä–æ–≤.." –°–æ–≤—Å–µ–º –Ω–µ –æ–±—è–∑–∞—Ç–µ–ª—å–Ω–æ, —É –º–µ–Ω—è –∏ –ø–µ—Ä–≤—ã–π —Ç–æ –Ω–µ –∞–ø–ø–∞—Ä–∞—Ç–Ω—ã–π - –ø–æ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è–º —Ä–∞–±–æ—Ç–∞–µ—Ç. –¢—É—Ç –ø—Ä–æ–±–ª–µ–º–∞ –≤ –¥—Ä—É–≥–æ–º, –æ–¥–Ω–æ –¥–µ–ª–æ —Å—Ç–∞–±–∏–ª–∏–∑–∏—Ä–æ–≤–∞—Ç—å —Å–∫–æ—Ä–æ—Å—Ç—å –ø–ª—é—Å –º–∏–Ω—É—Å –ª–∞–ø–æ—Ç—å, –∞ –¥—Ä—É–≥–æ–µ –¥–µ–ª–æ —Ç–æ—á–Ω–æ –æ—Å—Ç–∞–Ω–æ–≤–∏—Ç—å –¥–≤–∏–≥–∞—Ç–µ–ª—å –≤ –Ω—É–∂–Ω–æ–º –º–µ—Å—Ç–µ.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
karabass
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –º–∞—Ä 14, 2016 10:29:58 |
|
–ö–∞—Ä–º–∞: 1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 79
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –∏—é–ª 08, 2014 13:21:55
–°–æ–æ–±—â–µ–Ω–∏–π: 115
–û—Ç–∫—É–¥–∞: –°–∞–Ω–∫—Ç-–ü–µ—Ç–µ—Ä–±—É—Ä–≥
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ø—Ä–æ—Ç–µ—Å—Ç–∏–ª –ø–æ—Å–ª–µ–¥–Ω—é—é —Å–±–æ—Ä–∫—É –≤ —á–∞—Å—Ç–∏ —Ä–∞–±–æ—Ç—ã —Å –∫–∞–º–µ—Ä–∞–º–∏.
–≤—Å–µ –∫–∞–º–µ—Ä—ã –∏–º–µ—é—â–∏–µ—Å—è —É –º–µ–Ω—è –∏ —Ä–∞–Ω–µ–µ —Ä–∞–±–æ—Ç–∞–≤—à–∏–µ –∫—Ä–∏–≤–æ,
–Ý–ê–ë–û–¢–ê–Æ–¢ –ø—Ä–∞–≤–∏–ª—å–Ω–æ!, —Å –ª—é–±—ã–º–∏ –¥—Ä–æ–≤–∞–º–∏! (–∏ –≤–∏–Ω–¥–æ–≤—ã–º–∏ –∏ –ø—Ä–æ–ø—Ä–∏–µ—Ç–∞—Ä–Ω—ã–º–∏)
–∏—Ç–æ–≥–æ 2 –Ω–æ—É—Ç–±—É—á–Ω—ã–µ –∫–∞–º–µ—Ä—ã, 2 –≤—ç–±–∫–∞–º–µ—Ä—ã, –º–∏–∫—Ä–æ—Å–∫–æ–ø –∞-–ª—è —á–∞–π–Ω–∞, —ç–Ω–¥–æ—Å–∫–æ–ø —Ç–æ–∂–µ –∫–∏—Ç–∞–π—Å–∫–∏–π, –≤—Å–µ —á–µ—Ç–∫–æ.
–ø—Ä–æ–≤–µ—Ä–∏–ª –Ω–∞ —Ö–ø (–≤ –Ω–∞—Å—Ç—Ä–æ–π–∫–∏ –≤–æ–æ–±—â–µ –Ω–µ –ª–∞–∑–∏–ª, –ø—Ä–∞–≤–¥–∞ –≤—á–µ—Ä–∞ —è —Ç—É–¥–∞ —Å—Ç–∞–≤–∏–ª dotnet —Å–≤–µ–∂–∏–π, –º–æ–∂–µ—Ç –ø–æ–≤–ª–∏—è–ª–æ)
–Ω–∞ win7 —Ç–æ–∂–µ —Ä–∞–±–æ—Ç–∞–µ—Ç, –ù–û, –ø—Ä–∏—à–ª–æ—Å—å –≤–≤—ã–±–∏—Ä–∞—Ç—å —Ä–µ–∂–∏–º 640—Ö480, –∞ –∑–∞—Ç–µ–º –∑–∞–∫—Ä—ã–≤–∞—Ç—å –∫–∞–º–µ—Ä—É, –∏ —Ç–æ–ª—å–∫–æ –Ω–∞ —á–µ—Ç–≤–µ—Ä—Ç–æ–µ –≤–∫–ª—é—á–µ–Ω–∏–µ –∑–∞—Ä–∞–±–æ—Ç–∞–ª–æ –∫–∞–∫ –Ω–∞–¥–æ
–°–ø–∞—Å–∏–±–æ!!!
_________________
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
urez83
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –º–∞—Ä 14, 2016 16:49:34 |
|
| –≠–ª–µ–∫—Ç—Ä–∏—á–µ—Å–∫–∏–π –∫–æ—Ç |
 |
–ö–∞—Ä–º–∞: 8
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 443
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –æ–∫—Ç 31, 2014 18:38:30
–°–æ–æ–±—â–µ–Ω–∏–π: 1056
–û—Ç–∫—É–¥–∞: –Ý–æ—Å—Ç–æ–≤-–Ω–∞-–î–æ–Ω—É
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–î–∞. –ê –µ—Å–ª–∏ –±—ã —è –ø–æ—Ç–µ—Ä–ø–µ–ª –ø–∞—Ä—É –¥–µ–Ω—å–∫–æ–≤, —Ç–æ logitech c310 –±—ã–ª–∞ –±—ã –∂–∏–≤–∞.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Neekeetos
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –º–∞—Ä 14, 2016 17:10:55 |
|
| –î–µ—Ä–∂–∏—Ç –ø–∞—è–ª—å–Ω–∏–∫ —Ö–≤–æ—Å—Ç–æ–º |
|
–ö–∞—Ä–º–∞: 20
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 245
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü–Ω —Å–µ–Ω 18, 2006 11:16:05
–°–æ–æ–±—â–µ–Ω–∏–π: 993
–û—Ç–∫—É–¥–∞: –¢—É–ª–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 1
|
AlphaCrow –ø–∏—Å–∞–ª(–∞): –ü—Ä–æ–±–ª–µ–º —Å —Å–æ–≤–º–µ—Å—Ç–∏–º–æ—Å—Ç—å—é –±—ã—Ç—å –Ω–µ –¥–æ–ª–∂–Ω–æ. –î–ª—è –¥–≤–∏–∂–µ–Ω–∏—è –∫–∞—Ä–µ—Ç–∫–∏ –∏–ª–∏ —Å—Ç–æ–ª–∞, –ø—Ä–æ–≥–∞ –ø–µ—Ä–µ–¥–∞—ë—Ç –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä—É –∫–æ–æ—Ä–¥–∏–Ω–∞—Ç—ã –∫–æ–Ω–µ—á–Ω–æ–π —Ç–æ—á–∫–∏, –∞ –∫–∞–∫ –¥–æ—Å—Ç–∏–≥–Ω—É—Ç—å –µ—ë, –¥—É–º–∞–µ—Ç —Å–∞–º –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä. –ù—É —á—Ç–æ–∂, —ç—Ç–æ –∑–¥–æ—Ä–æ–≤–æ, –±—É–¥—É –¥–µ–ª–∞—Ç—å . AlphaCrow –ø–∏—Å–∞–ª(–∞): –°–æ–≤—Å–µ–º –Ω–µ –æ–±—è–∑–∞—Ç–µ–ª—å–Ω–æ, —É –º–µ–Ω—è –∏ –ø–µ—Ä–≤—ã–π —Ç–æ –Ω–µ –∞–ø–ø–∞—Ä–∞—Ç–Ω—ã–π - –ø–æ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è–º —Ä–∞–±–æ—Ç–∞–µ—Ç. –¢—É—Ç –ø—Ä–æ–±–ª–µ–º–∞ –≤ –¥—Ä—É–≥–æ–º, –æ–¥–Ω–æ –¥–µ–ª–æ —Å—Ç–∞–±–∏–ª–∏–∑–∏—Ä–æ–≤–∞—Ç—å —Å–∫–æ—Ä–æ—Å—Ç—å –ø–ª—é—Å –º–∏–Ω—É—Å –ª–∞–ø–æ—Ç—å, –∞ –¥—Ä—É–≥–æ–µ –¥–µ–ª–æ —Ç–æ—á–Ω–æ –æ—Å—Ç–∞–Ω–æ–≤–∏—Ç—å –¥–≤–∏–≥–∞—Ç–µ–ª—å –≤ –Ω—É–∂–Ω–æ–º –º–µ—Å—Ç–µ. –ö–∞–∫ —Ä–∞–∑ –æ–± —ç—Ç–æ–º –∏ —Ö–æ—Ç–µ–ª —Å–∫–∞–∑–∞—Ç—å. –î–µ–ª–æ –≤ —Ç–æ–º —á—Ç–æ —É –≤–∞—Å –≤ –ø—Ä–æ—à–∏–≤–∫–µ —Ä–µ–≥—É–ª–∏—Ä–æ–≤–∞–Ω–∏–µ –¥–≤–∏–≥–∞—Ç–µ–ª—è –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç —Ç–æ–∂–µ –ø–æ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è–º, –∞ —á–∞—Å—Ç–æ—Ç–∞ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–π –Ω–µ –ø–æ—Å—Ç–æ—è–Ω–Ω–∞. –î–ª—è –Ω–æ—Ä–º–∞–ª—å–Ω–æ–π —Ä–∞–±–æ—Ç—ã —Ç–∞–∫–æ–≥–æ –ø–∏–¥ —Ä–µ–≥—É–ª—è—Ç–æ—Ä–∞ —Ç—Ä–µ–±—É–µ—Ç—Å—è –Ω–∞–±–æ—Ä –∫–æ—ç—Ñ—Ñ–∏—Ü–∏–µ–Ω—Ç–æ–≤ –Ω–∞ –∫–∞–∂–¥—É—é —Å–∫–æ—Ä–æ—Å—Ç—å, –ø–æ—Å–∫–æ–ª—å–∫—É –¥–∏–Ω–∞–º–∏—á–µ—Å–∫–∏–µ –ø–∞—Ä–∞–º–µ—Ç—Ä—ã —Å–∏—Å—Ç–µ–º—ã –ø–æ—Å—Ç–æ—è–Ω–Ω—ã –Ω–æ —É—Å–∏–ª–µ–Ω–∏–µ –ø–µ—Ç–ª–∏ —Ä–µ–≥—É–ª–∏—Ä–æ–≤–∞–Ω–∏—è –º–µ–Ω—è–µ—Ç—Å—è –∏ –∑–∞–≤–∏—Å–∏—Ç –æ—Ç —á–∞—Å—Ç–æ—Ç—ã. –ù–æ—Ä–º–∞–ª—å–Ω–æ –±—ã–ª–æ –±—ã —Å–¥–µ–ª–∞—Ç—å –∞–ø–ø–∞—Ä–∞—Ç–Ω—ã–π —Å—á–µ—Ç—á–∏–∫ –ø–æ–∑–∏—Ü–∏–∏ —ç–Ω–∫–æ–¥–µ—Ä–∞ –∏ —Å—á–∏—Ç—ã–≤–∞–Ω–∏–µ –µ–≥–æ —Å —Ñ–∏–∫—Å–∏—Ä–æ–≤–∞–Ω–Ω–æ–π —á–∞—Å—Ç–æ—Ç–æ–π, —Ç–æ–≥–¥–∞ –∏ —Ä–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ —Å–∫–æ—Ä–æ—Å—Ç–∏ –∏ –∑–∞–¥–∞–Ω–∏–µ –ø–æ–∑–∏—Ü–∏–∏ –ø—Ä–æ–±–ª–µ–º—ã –Ω–µ –±—É–¥—É—Ç –ø—Ä–µ–¥—Å—Ç–∞–≤–ª—è—Ç—å. –ö–æ–Ω–µ—á–Ω–æ –¥–ª—è —ç—Ç–æ–≥–æ –ø—Ä–∏–¥–µ—Ç—Å—è –ø—Ä–∏–¥—É–º–∞—Ç—å –∫–∞–∫ –ø—Ä–∏–≤—è–∑–∞—Ç—å –º–æ–¥—É–ª—è—Ç–æ—Ä –ª–∞–∑–µ—Ä–∞ –∫ —Ç–µ–∫—É—â–µ–π –ø–æ–∑–∏—Ü–∏–∏ –∫–∞—Ä–µ—Ç–∫–∏.
_________________
–ò–Ω—Ñ–æ—Ä–º–∞—Ü–∏—è –ø–æ RLC mini –Ω–∞—Ö–æ–¥–∏—Ç—Å—è >—Ç—É—Ç<
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
vilkin
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –º–∞—Ä 16, 2016 09:47:40 |
|
| –û—Ç–∫—Ä—ã–ª –≥–ª–∞–∑–∞ |
|
–ö–∞—Ä–º–∞: 6
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 14
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –º–∞–π 23, 2010 11:54:59
–°–æ–æ–±—â–µ–Ω–∏–π: 69
–û—Ç–∫—É–¥–∞: –ú–æ—Å–∫–≤–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
mial
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –º–∞—Ä 21, 2016 23:58:55 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
|
–ö–∞—Ä–º–∞: 95
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2204
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —è–Ω–≤ 06, 2010 23:31:56
–°–æ–æ–±—â–µ–Ω–∏–π: 3254
–û—Ç–∫—É–¥–∞: –ë–æ—Ä–æ–≤–∏—á–∏, –ù–æ–≤–≥. –æ–±–ª.
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 1
|
–£ –∫–æ–≥–æ –Ω–∏ –±—É–¥—å –∫—Ç–æ —Å–æ–±—Ä–∞–ª —É—Å—Ç–∞–Ω–æ–≤–∫—É, –µ—Å—Ç—å –ª–µ–Ω—Ç–∞ –Ω–∞ 720 dpi? –ö–∞–∫ —Å –Ω–µ–π —Ä–∞–±–æ—Ç–∞–µ—Ç? –í–æ–ø—Ä–æ—Å –∫ AlphaCrow, —Å–ø—Ä–∞–≤–∏—Ç—Å—è –ª–∏ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –µ—Å–ª–∏ –ø–æ—Å—Ç–∞–≤–∏—Ç—å –º–∞–≥–Ω–∏—Ç–Ω—É—é –ª–µ–Ω—Ç—É –∏ –¥–∞—Ç—á–∏–∫ —Å —Ñ–∏–∑–∏—á–µ—Å–∫–∏–º —Ä–∞–∑—Ä–µ—à–µ–Ω–∏–µ–º –≥–¥–µ —Ç–æ –≤ 1200 dpi? –¢–æ –µ—Å—Ç—å –Ω–∞ —É—Å—Ç–∞–Ω–æ–≤–∫–µ –ø–æ–ª—É—á–∏—Ç—å—Å—è 4800 dpi. –ü—Ä–æ—Å—Ç–æ –µ—Å—Ç—å –≤—Ä–æ–¥–µ –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç—å –¥–æ—Å—Ç–∞—Ç—å —Ç–∞–∫—É—é —à—Ç—É–∫—É, –Ω–æ –µ—Å–ª–∏ –Ω–µ —Å–ø—Ä–∞–≤–∏—Ç—å—Å—è, —Ç–æ —Ç–æ–≥–¥–∞ –Ω–µ —Å—Ç–æ–∏—Ç –∏ —Å—É–µ—Ç–∏—Ç—å—Å—è...
_________________
–ü—Ä–æ—Ç–æ—Ç–∏–ø—ã –ø–µ—á–∞—Ç–Ω—ã—Ö –ø–ª–∞—Ç –Ω–∞ –∑–∞–∫–∞–∑ https://radiokot.ru/forum/viewtopic.php?f=54&t=122701
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Seriyvolk
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –º–∞—Ä 22, 2016 00:22:00 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
 |
–ö–∞—Ä–º–∞: 93
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2154
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –º–∞–π 05, 2012 20:19:55
–°–æ–æ–±—â–µ–Ω–∏–π: 4961
–û—Ç–∫—É–¥–∞: –ú–∏–Ω—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
mial –ø–∏—Å–∞–ª(–∞): —Å–ø—Ä–∞–≤–∏—Ç—Å—è –ª–∏ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –µ—Å–ª–∏ –ø–æ—Å—Ç–∞–≤–∏—Ç—å –º–∞–≥–Ω–∏—Ç–Ω—É—é –ª–µ–Ω—Ç—É –∏ –¥–∞—Ç—á–∏–∫ —Å —Ñ–∏–∑–∏—á–µ—Å–∫–∏–º —Ä–∞–∑—Ä–µ—à–µ–Ω–∏–µ–º –≥–¥–µ —Ç–æ –≤ 1200 dpi? –ê –∫—É–¥–∞ –µ–º—É –¥–µ—Ç—å—Å—è —Ç–æ? –í–æ–ø—Ä–æ—Å —Ç–æ–ª—å–∫–æ –≤ –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ –¥–æ—Å—Ç–∏–∂–∏–º–æ–π —Å–∫–æ—Ä–æ—Å—Ç–∏ –ø–µ—á–∞—Ç–∏. –Ø –±—ã –ø–æ–ø—Ä–æ–±–æ–≤–∞–ª. –ö—Å—Ç–∞—Ç–∏, –µ—Å–ª–∏ —Ç–∞–∫–∞—è —à—Ç—É–∫–∞ –≤–ø–æ–ª–Ω–µ –¥–æ—Å—Ç–∞–≤–∞–µ–º–∞ –∑–∞ –≤–º–µ–Ω—è–µ–º—ã–µ –¥–µ–Ω—å–≥–∏, —Ç–æ —è –±—ã –ø–æ–¥–ø–∏—Å–∞–ª—Å—è –Ω–∞ –∫–æ–º–ø–ª–µ–∫—Ç.  –ü—ã.–°—ã: –≤ –ø–æ—Ä—è–¥–∫–µ –±—Ä–µ–¥–∞ –º–æ–∂–Ω–æ –ø–æ–ø—Ä–æ–±–æ–≤–∞—Ç—å –∑–∞—é–∑–∞—Ç—å –ª–µ–Ω—Ç—É —Å –º–µ–Ω—å—à–∏–º —Ä–∞–∑—Ä–µ—à–µ–Ω–∏–µ–º, –Ω–æ —Å –∞–Ω–∞–ª–æ–≥–æ–≤—ã–º —ç–Ω–∫–æ–¥–µ—Ä–æ–º. –ò–º–ø—É–ª—å—Å—ã —Ñ–æ—Ä–º–∏—Ä–æ–≤–∞—Ç—å –æ—Ç–¥–µ–ª—å–Ω–æ–π —Å—Ö–µ–º–æ–π —Å —à—É—Å—Ç—Ä—ã–º–∏ –∫–æ–º–ø–∞—Ä–∞—Ç–æ—Ä–∞–º–∏, —Ä–∞–∑–º–µ—Å—Ç–∏–≤ —Å—Ö–µ–º—É –ø—Ä—è–º –Ω–∞ –±–∞—à–∫–µ –≤–æ –∏–∑–±–µ–∂–∞–Ω–∏–µ –ø–æ–º–µ—Ö. –ü–æ –∫—Ä–∞–π–Ω–µ–π –º–µ—Ä–µ —Ç–æ—á–Ω–æ—Å—Ç—å –ø—Ä–∏—Ü–µ–ª–∏–≤–∞–Ω–∏—è –ø–æ —Ä–µ–ø–µ—Ä—É –±—É–¥–µ—Ç –∑–Ω–∞—á–∏—Ç–µ–ª—å–Ω–æ –≤—ã—à–µ, –Ω–µ–∂–µ–ª–∏ —Å–µ–π—á–∞—Å.
_________________
–ü—Ä–∏–±–æ—Ä, –∑–∞—â–∏—â—ë–Ω–Ω—ã–π –ø—Ä–µ–¥–æ—Ö—Ä–∞–Ω–∏—Ç–µ–ª–µ–º, —Å–≥–æ—Ä–∞–µ—Ç –ø–µ—Ä–≤—ã–º, –∑–∞—â–∏—Ç–∏–≤ –ø—Ä–µ–¥–æ—Ö—Ä–∞–Ω–∏—Ç–µ–ª—å. –ó–∞–∫–æ–Ω –ú–µ—Ä—Ñ–∏.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
|
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 93 –∏–∑ 507
|
[ –°–æ–æ–±—â–µ–Ω–∏–π: 10133 ] |
... , , , , , , ... |
–ö—Ç–æ —Å–µ–π—á–∞—Å –Ω–∞ —Ñ–æ—Ä—É–º–µ |
–°–µ–π—á–∞—Å —ç—Ç–æ—Ç —Ñ–æ—Ä—É–º –ø—Ä–æ—Å–º–∞—Ç—Ä–∏–≤–∞—é—Ç: –Ω–µ—Ç –∑–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω–Ω—ã—Ö –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª–µ–π –∏ –≥–æ—Å—Ç–∏: 16 |
|
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –Ω–∞—á–∏–Ω–∞—Ç—å —Ç–µ–º—ã
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –æ—Ç–≤–µ—á–∞—Ç—å –Ω–∞ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ —É–¥–∞–ª—è—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –¥–æ–±–∞–≤–ª—è—Ç—å –≤–ª–æ–∂–µ–Ω–∏—è
|
|
|