|
–§–æ—Ä—É–º –Ý–∞–¥–∏–æ–ö–æ—Ç • –ü—Ä–æ—Å–º–æ—Ç—Ä —Ç–µ–º—ã - –õ–∞–∑–µ—Ä–Ω–∞—è —É—Å—Ç–∞–Ω–æ–≤–∫–∞ –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ –æ—Ç AlphaCrow
–°–æ–æ–±—â–µ–Ω–∏—è –±–µ–∑ –æ—Ç–≤–µ—Ç–æ–≤ | –ê–∫—Ç–∏–≤–Ω—ã–µ —Ç–µ–º—ã
 
|
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 43 –∏–∑ 507
|
[ –°–æ–æ–±—â–µ–Ω–∏–π: 10133 ] |
... , , , , , , ... |
| –ê–≤—Ç–æ—Ä |
–°–æ–æ–±—â–µ–Ω–∏–µ |
dmirrr

|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏.  –î–æ–±–∞–≤–ª–µ–Ω–æ: –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –¥–µ–∫ 07, 2015 15:56:34 |
|
| –ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º |
 |
–ö–∞—Ä–º–∞: 6
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 79
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –¥–µ–∫ 07, 2010 15:34:19
–°–æ–æ–±—â–µ–Ω–∏–π: 475
–û—Ç–∫—É–¥–∞: UA
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–°—Ç–∞–≤–∏–ª —Ç–∞–∫–æ–π –≤ –ø–∞—è–ª—å–Ω—É—é —Å—Ç–∞–Ω—Ü–∏—é, —Å–ª–∞–≤–∞ –±–æ–≥—É, –Ω–∏—á–µ–≥–æ –Ω–µ —Å–≥–æ—Ä–µ–ª–æ, –Ω–æ –ú–ö –ø–æ—Å—Ç–æ—è–Ω–Ω–æ —Å—Ö–æ–¥–∏–ª —Å —É–º–∞. –ó–∞–≤–∏—Å–∞–Ω–∏—è, –ø–µ—Ä–µ–∑–∞–ø—É—Å–∫–∏. –•–æ—Ç—è 2 —Ç–∞–∫–∏—Ö —Å—Ç–æ—è—Ç –Ω–∞ –ø–∏—Ç–∞–Ω–∏–∏ –¥—Ä—É–≥–∏—Ö —É—Å—Ç—Ä–æ–π—Å—Ç–≤ —Å —Ç–æ–∫–æ–º –ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏—è –æ–∫–æ–ª–æ 0,5–ê-1–ê, —Ç–∞–º –≤—Å–µ –Ω–æ—Ä–º–∞–ª—å–Ω–æ. –ü—Ä–∏—à–µ–ª –∫ –≤—ã–≤–æ–¥—É, —á—Ç–æ –Ω–µ –ª—é–±–∏—Ç —ç—Ç–æ—Ç —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ç–æ—Ä –º–∞–ª–µ–Ω—å–∫—É—é –Ω–∞–≥—Ä—É–∑–∫—É.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
 |
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
Ticky
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –¥–µ–∫ 07, 2015 18:23:33 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 26, 2009 11:56:29
–°–æ–æ–±—â–µ–Ω–∏–π: 17
–û—Ç–∫—É–¥–∞: Lietuva Visaginas
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–¢–æ–ª–∫–æ–≤–∞—è —Å—Ç–∞—Ç—å—è –ø—Ä–æ –∫–∏—Ç–∞–π—Å–∫–∏–π –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å –Ω–∞ Lm2596 –ø–æ —ç—Ç–æ–π —Å—Å—ã–ª–∫–µ: http://mysku.ru/blog/aliexpress/33783.html–ü–æ—Å–ª–µ –µ—ë –ø—Ä–æ—á—Ç–µ–Ω–∏—è –¥–ª—è —Å–µ–±—è —Å–¥–µ–ª–∞–ª –≤—ã–≤–æ–¥, —á—Ç–æ —Å–≤—è–∑—ã–≤–∞—Ç—å—Å—è —Å –∫–∏—Ç–∞–π—Å–∫–∏–º–∏ Lm2596 –Ω–µ—Ç —Å–º—ã—Å–ª–∞.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
mr_kot
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –¥–µ–∫ 07, 2015 19:13:25 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
 |
–ö–∞—Ä–º–∞: 18
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1121
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –Ω–æ—è 27, 2009 18:12:27
–°–æ–æ–±—â–µ–Ω–∏–π: 4625
–û—Ç–∫—É–¥–∞: –ß–µ—Ä–∫–∞—Å—Å—ã, UA
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
Ticky –ø–∏—Å–∞–ª(–∞): –¥–ª—è —Å–µ–±—è —Å–¥–µ–ª–∞–ª –≤—ã–≤–æ–¥, —á—Ç–æ —Å–≤—è–∑—ã–≤–∞—Ç—å—Å—è —Å –∫–∏—Ç–∞–π—Å–∫–∏–º–∏ Lm2596 –Ω–µ—Ç —Å–º—ã—Å–ª–∞. –ù—É –ø–æ—á–µ–º—É –∂–µ? –ü—Ä–µ–∫—Ä–∞—Å–Ω–æ –æ–Ω–∏ —Ä–∞–±–æ—Ç–∞—é—Ç. –ù–æ –Ω–∞–¥–æ —É—á–∏—Ç—ã–≤–∞—Ç—å, —á—Ç–æ —É—Å—Ç–∞–Ω–æ–≤–ª–µ–Ω—ã –≤ –Ω–∏—Ö –Ω–µ 2596, –∞ 2576 –ø–µ—Ä–µ–º–∞—Ä–∫–∏—Ä–æ–≤–∞–Ω–Ω—ã–µ. –ü–æ—ç—Ç–æ–º—É –Ω–∞ —Ç–æ–∫–∞—Ö –¥–æ 1-1,5 –ê —Ä–∞–±–æ—Ç–∞—é—Ç –Ω–æ—Ä–º–∞–ª—å–Ω–æ "–∏–∑ –∫–æ—Ä–æ–±–∫–∏", –¥–ª—è –ø–æ–ª—É—á–µ–Ω–∏—è –∑–∞—è–≤–ª–µ–Ω–Ω–æ–≥–æ —Ç–æ–∫–∞ 3 –ê –Ω–∞–¥–æ —É–≤–µ–ª–∏—á–∏–≤–∞—Ç—å –∏–Ω–¥—É–∫—Ç–∏–≤–Ω–æ—Å—Ç—å –¥—Ä–æ—Å—Å–µ–ª—è. –ö–ü–î –Ω–µ –∏–∑–º–µ—Ä—è–ª, –∫–∞–∫-—Ç–æ –Ω–µ –±—ã–ª–æ –Ω–∞–¥–æ–±–Ω–æ—Å—Ç–∏. –ê –≤–æ—Ç —Ä–∞–±–æ—Ç–∞—é—Ç –æ–Ω–∏ –Ω–∞ —á–∞—Å—Ç–æ—Ç–µ 52 –∫–ì—Ü, –∫–∞–∫ –∏ –¥–æ–ª–∂–Ω–∞ —Ä–∞–±–æ—Ç–∞—Ç—å 2576.
_________________

В мире нет вредных веществ, в мире есть вредные количества © Д.И.Менделеев
Когда на форуме переходят на "Вы", в реальной жизни уже давно бьют морду © автор неизвестен.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Seriyvolk
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –¥–µ–∫ 07, 2015 19:51:01 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
 |
–ö–∞—Ä–º–∞: 93
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2154
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –º–∞–π 05, 2012 20:19:55
–°–æ–æ–±—â–µ–Ω–∏–π: 4961
–û—Ç–∫—É–¥–∞: –ú–∏–Ω—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–°–µ–≥–æ–¥–Ω—è —É—Ç—Ä–æ–º –∑–≤—è–∫–Ω—É–ª –Ω–∞ —Ñ–∏—Ä–º—É, –∏ –≤ –æ–±–µ–¥ –∑–∞–±—Ä–∞–ª –¥–µ—Å—è—Ç–æ–∫ –Ω–µ —Ñ–µ–π–∫–æ–≤—ã—Ö 3120. –ù—É –∏ –∫–∞–∫ —Å–ª–µ–¥—Å—Ç–≤–∏–µ, –≤–æ–∑–Ω–∏–∫ –≤–æ–ø—Ä–æ—Å: mial, —Ä–∞—Å—Å–∫–∞–∂–∏ –ø–ª–∏–∑, –∫–∞–∫ —Ç—ã –Ω–∞—Å—Ç—Ä–∞–∏–≤–∞–ª –ü–ò–î—ã, –∏–±–æ –Ω–∞ –¥–∞–Ω–Ω–æ–º —ç—Ç–∞–ø–µ —è –∫–∞–∫ –Ω–∏ –∫—Ä—É—Ç–∏–ª, –∞ –≥–æ–ª–æ–≤–∞ –≤—Å—ë —Ä–∞–≤–Ω–æ –æ—á–µ–Ω—å —Ä–µ–∑–∫–æ —Ç—Ä–æ–≥–∞–µ—Ç—Å—è, –∞ –ø–æ—Ç–æ–º —Ç–æ–ª—å–∫–æ —É–∂–µ –µ–¥–µ—Ç —Å –Ω–æ—Ä–º–∞–ª—å–Ω–æ–π —Å–∫–æ—Ä–æ—Å—Ç—å—é. –í–∏–¥–Ω–æ –≤–∏–Ω–æ–π —ç—Ç–æ–º—É –º–∏–Ω–∏–º–∞–ª—å–Ω–∞—è –ø–æ–¥–≤–∏–∂–Ω–∞—è –º–∞—Å—Å–∞ —Å–∏—Å—Ç–µ–º—ã, –ø–æ–ª—É—á–∏–≤—à–∞—è—Å—è —É –º–µ–Ω—è.  –ù—É –∏ –≤ —Å–ø–∏—Å–æ–∫ –ø—Ä–æ–±–ª–µ–º –¥–æ–±–∞–≤–ª—é, —á—Ç–æ –∫–∞—Ä–µ—Ç–∫–∞ —Å –∑–∞–≤–∏–¥–Ω–æ–π –ø–µ—Ä–∏–æ–¥–∏—á–Ω–æ—Å—Ç—å—é —Å—Ä—ã–≤–∞–µ—Ç—Å—è –≤ –≥–∞–ª–æ–ø. –Ý–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –ü–ò–î–æ–≤ –Ω–µ –ø–æ–º–æ–≥–∞–µ—Ç.
_________________
–ü—Ä–∏–±–æ—Ä, –∑–∞—â–∏—â—ë–Ω–Ω—ã–π –ø—Ä–µ–¥–æ—Ö—Ä–∞–Ω–∏—Ç–µ–ª–µ–º, —Å–≥–æ—Ä–∞–µ—Ç –ø–µ—Ä–≤—ã–º, –∑–∞—â–∏—Ç–∏–≤ –ø—Ä–µ–¥–æ—Ö—Ä–∞–Ω–∏—Ç–µ–ª—å. –ó–∞–∫–æ–Ω –ú–µ—Ä—Ñ–∏.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
bifurkas
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –¥–µ–∫ 07, 2015 22:23:51 |
|
| –ü—Ä–æ—Ä–µ–∑–∞–ª–∏—Å—å –∑—É–±—ã |
 |
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 85
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç —Ñ–µ–≤ 02, 2010 21:25:18
–°–æ–æ–±—â–µ–Ω–∏–π: 223
–û—Ç–∫—É–¥–∞: –ù.–ù–æ–≤–≥–æ—Ä–æ–¥
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–í–æ–ø—Ä–æ—Å —Ç–∞–∫–æ–π, –≤ –ø–µ—Ä–≤—É—é –æ—á–µ—Ä–µ–¥—å –∫ –∞–≤—Ç–æ—Ä—É —Å—Ö–µ–º—ã: –∞ –≤–º–µ—Å—Ç–æ P3004ND5G –Ω–µ–ª—å–∑—è —á—Ç–æ-—Ç–æ –ø–æ–ø—Ä–æ—â–µ –ø—Ä–∏–º–µ–Ω–∏—Ç—å? –ù–∞–ø—Ä–∏–º–µ—Ä —Å–≤—è–∑–∫—É IRF530/9530? –û–Ω–∏ –∫–æ–Ω–µ—á–Ω–æ –ø–æ-–º–µ–¥–ª–µ–Ω–Ω–µ–µ –ø–æ—á—Ç–∏ –≤ –¥–≤–∞ —Ä–∞–∑–∞, –Ω–æ –º–æ–∂–µ—Ç –±—É–¥–µ—Ç –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ?
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
Seriyvolk
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –¥–µ–∫ 07, 2015 22:33:09 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
|
–ö–∞—Ä–º–∞: 93
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2154
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –º–∞–π 05, 2012 20:19:55
–°–æ–æ–±—â–µ–Ω–∏–π: 4961
–û—Ç–∫—É–¥–∞: –ú–∏–Ω—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–Ø –ø–æ—Å—Ç–∞–≤–∏–ª AO4614, –Ω–µ –≥—Ä–µ—é—Ç—Å—è —Å–æ–≤—Å–µ–º. –ú–æ–∂–Ω–æ —Å —Ç–µ–º-–∂–µ —É—Å–ø–µ—Ö–æ–º –ø–æ—Å—Ç–∞–≤–∏—Ç—å IRF7319, –¥–æ–≤–æ–ª—å–Ω–æ —Ä–∞—Å–ø—Ä–æ—Å—Ç—Ä–∞–Ω—ë–Ω–Ω—ã–µ —Ñ–µ—Ç—ã.
IRF530 —Å–∏–ª—å–Ω–æ –∂–∏—Ä–Ω–æ —Å—é–¥–∞ —Å—Ç–∞–≤–∏—Ç—å.
_________________
–ü—Ä–∏–±–æ—Ä, –∑–∞—â–∏—â—ë–Ω–Ω—ã–π –ø—Ä–µ–¥–æ—Ö—Ä–∞–Ω–∏—Ç–µ–ª–µ–º, —Å–≥–æ—Ä–∞–µ—Ç –ø–µ—Ä–≤—ã–º, –∑–∞—â–∏—Ç–∏–≤ –ø—Ä–µ–¥–æ—Ö—Ä–∞–Ω–∏—Ç–µ–ª—å. –ó–∞–∫–æ–Ω –ú–µ—Ä—Ñ–∏.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
mial
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –¥–µ–∫ 08, 2015 08:22:33 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
 |
–ö–∞—Ä–º–∞: 95
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2204
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —è–Ω–≤ 06, 2010 23:31:56
–°–æ–æ–±—â–µ–Ω–∏–π: 3254
–û—Ç–∫—É–¥–∞: –ë–æ—Ä–æ–≤–∏—á–∏, –ù–æ–≤–≥. –æ–±–ª.
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 1
")
|
Seriyvolk –ø–∏—Å–∞–ª(–∞): –ù—É –∏ –≤ —Å–ø–∏—Å–æ–∫ –ø—Ä–æ–±–ª–µ–º –¥–æ–±–∞–≤–ª—é, —á—Ç–æ –∫–∞—Ä–µ—Ç–∫–∞ —Å –∑–∞–≤–∏–¥–Ω–æ–π –ø–µ—Ä–∏–æ–¥–∏—á–Ω–æ—Å—Ç—å—é —Å—Ä—ã–≤–∞–µ—Ç—Å—è –≤ –≥–∞–ª–æ–ø. –Ý–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –ü–ò–î–æ–≤ –Ω–µ –ø–æ–º–æ–≥–∞–µ—Ç.
–≠—Ç–æ –≤ —Ä—É—á–Ω–æ–º —Ä–µ–∂–∏–º–µ? –ê –≤ –∞–≤—Ç–æ–º–∞—Ç–µ –≤—Å–µ –Ω–æ—Ä–º–∞–ª—å–Ω–æ? –Ø –Ω–∞—Å—Ç—Ä–∞–∏–≤–∞–ª —Ç–∞–∫. –í –Ω–∞—Å—Ç—Ä–æ–π–∫–∞—Ö —Å—Ç–∞–≤–∏–ª —Å–∫–æ—Ä–æ—Å—Ç—å –∫–∞—Ä–µ—Ç–∫–∏ —Å –∫–æ—Ç–æ—Ä–æ–π –æ–Ω–∞ –Ω–∞—á–∏–Ω–∞–µ—Ç —Ö–æ—Ç—å –∫–∞–∫ —Ç–æ –µ–∑–¥–∏—Ç—å. –ü–ª—é—Å –≤ –Ω–∞—Å—Ç—Ä–æ–π–∫–∞—Ö –Ω–∞–¥–æ —É–∫–∞–∑–∞—Ç—å –º–∏–Ω–∏–º–∞–ª—å–Ω–æ –≤–æ–∑–º–æ–∂–Ω–æ–µ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ –ø–∏—Ç–∞–Ω–∏—è –º–æ—Ç–æ—Ä–∞, –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ –≤–æ–∑–º–æ–∂–Ω–æ–µ. –ò –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ –ø–∏—Ç–∞–Ω–∏—è –¥—Ä–∞–π–≤–µ—Ä–∞. –ü–æ—Ç–æ–º –∏–¥–µ–º –≤ –Ω–∞—Å—Ç—Ä–æ–π–∫—É –ø–∏–¥ –∏ –∑–∞–ø—É—Å–∫–∞–µ–º –µ–µ. –ü–æ–¥–±–æ—Ä–æ–º –∑–Ω–∞—á–µ–Ω–∏–π –¥–æ–±–∏–≤–∞–µ–º—Å—è –ø–ª–∞–≤–Ω–æ–≥–æ –±–µ–∑ —Ä—ã–≤–∫–æ–≤ –¥–≤–∏–∂–µ–Ω–∏—è –º–æ—Ç–æ—Ä–æ–≤. –ú–æ–∂–µ—Ç –∏ –Ω–µ –ø—Ä–∞–≤–∏–ª—å–Ω–æ, –Ω–æ —É –º–µ–Ω—è –±–æ–ª–µ–µ –º–µ–Ω–µ–µ –ø–æ–ª—É—á–∏–ª–æ—Å—å –Ω–∞—Å—Ç—Ä–æ–∏—Ç—å. –ê —Ç–∞–∫ –Ω–∞–¥–æ –∫–æ–Ω–µ—á–Ω–æ —É—Ç–æ—á–Ω–∏—Ç—å —É AlphaCrow.
_________________
–ü—Ä–æ—Ç–æ—Ç–∏–ø—ã –ø–µ—á–∞—Ç–Ω—ã—Ö –ø–ª–∞—Ç –Ω–∞ –∑–∞–∫–∞–∑ https://radiokot.ru/forum/viewtopic.php?f=54&t=122701
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Seriyvolk
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –¥–µ–∫ 08, 2015 09:46:50 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
|
–ö–∞—Ä–º–∞: 93
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2154
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –º–∞–π 05, 2012 20:19:55
–°–æ–æ–±—â–µ–Ω–∏–π: 4961
–û—Ç–∫—É–¥–∞: –ú–∏–Ω—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
mial –ø–∏—Å–∞–ª(–∞): –ê –≤ –∞–≤—Ç–æ–º–∞—Ç–µ –≤—Å–µ –Ω–æ—Ä–º–∞–ª—å–Ω–æ? –í –∞–≤—Ç–æ–º–∞—Ç–µ —Ç–æ–∂–µ —Å—Ä—ã–≤–∞–µ—Ç. –ü–æ—Å–ª–µ —É–±–∏—Ä–∞–Ω–∏—è –ª—é—Ñ—Ç–æ–≤ –º–µ—Ö–∞–Ω–∏–∑–º –∫–∞—Ä–µ—Ç–∫–∏ —É–∂–µ –Ω–µ–º–Ω–æ–≥–æ —Ä–∞–∑—Ä–∞–±–æ—Ç–∞–ª—Å—è, –∏ —ç—Ç–æ –Ω–∞—á–∏–Ω–∞–µ—Ç –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç—å –≤—Å—ë —á–∞—â–µ. mial –ø–∏—Å–∞–ª(–∞): –ü–ª—é—Å –≤ –Ω–∞—Å—Ç—Ä–æ–π–∫–∞—Ö –Ω–∞–¥–æ —É–∫–∞–∑–∞—Ç—å –º–∏–Ω–∏–º–∞–ª—å–Ω–æ –≤–æ–∑–º–æ–∂–Ω–æ–µ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ –ø–∏—Ç–∞–Ω–∏—è –º–æ—Ç–æ—Ä–∞, –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ –≤–æ–∑–º–æ–∂–Ω–æ–µ. –Ø —ç—Ç–∏ –Ω–∞—Å—Ç—Ä–æ–π–∫–∏ –∫—Ä—É—Ç–∏–ª, –Ω–æ –ø–æ–ø—Ä–æ–±—É—é –µ—â—ë —Ä–∞–∑, –ø–æ —Ç–≤–æ–µ–π –º–µ—Ç–æ–¥–µ.
_________________
–ü—Ä–∏–±–æ—Ä, –∑–∞—â–∏—â—ë–Ω–Ω—ã–π –ø—Ä–µ–¥–æ—Ö—Ä–∞–Ω–∏—Ç–µ–ª–µ–º, —Å–≥–æ—Ä–∞–µ—Ç –ø–µ—Ä–≤—ã–º, –∑–∞—â–∏—Ç–∏–≤ –ø—Ä–µ–¥–æ—Ö—Ä–∞–Ω–∏—Ç–µ–ª—å. –ó–∞–∫–æ–Ω –ú–µ—Ä—Ñ–∏.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
mial
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –¥–µ–∫ 08, 2015 10:41:45 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
|
–ö–∞—Ä–º–∞: 95
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2204
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —è–Ω–≤ 06, 2010 23:31:56
–°–æ–æ–±—â–µ–Ω–∏–π: 3254
–û—Ç–∫—É–¥–∞: –ë–æ—Ä–æ–≤–∏—á–∏, –ù–æ–≤–≥. –æ–±–ª.
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 1
|
Seriyvolk –ø–∏—Å–∞–ª(–∞): –í –∞–≤—Ç–æ–º–∞—Ç–µ —Ç–æ–∂–µ —Å—Ä—ã–≤–∞–µ—Ç. –ü–æ—Å–ª–µ —É–±–∏—Ä–∞–Ω–∏—è –ª—é—Ñ—Ç–æ–≤ –º–µ—Ö–∞–Ω–∏–∑–º –∫–∞—Ä–µ—Ç–∫–∏ —É–∂–µ –Ω–µ–º–Ω–æ–≥–æ —Ä–∞–∑—Ä–∞–±–æ—Ç–∞–ª—Å—è, –∏ —ç—Ç–æ –Ω–∞—á–∏–Ω–∞–µ—Ç –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç—å –≤—Å—ë —á–∞—â–µ. –í–æ–∑–º–æ–∂–Ω–æ –ø—Ä–æ–±–ª–µ–º–∞ –≤ —Ç–æ–º —á—Ç–æ —Ç–µ—Ä—è–µ—Ç –ª–µ–Ω—Ç—É. –¢–∞–º –æ—á–µ–Ω—å —Ç–æ—á–Ω–æ –≤—Å–µ –Ω–∞–¥–æ –≤—ã—Å—Ç–∞–≤–∏—Ç—å.
_________________
–ü—Ä–æ—Ç–æ—Ç–∏–ø—ã –ø–µ—á–∞—Ç–Ω—ã—Ö –ø–ª–∞—Ç –Ω–∞ –∑–∞–∫–∞–∑ https://radiokot.ru/forum/viewtopic.php?f=54&t=122701
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
Seriyvolk
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –¥–µ–∫ 08, 2015 11:55:10 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
|
–ö–∞—Ä–º–∞: 93
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2154
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –º–∞–π 05, 2012 20:19:55
–°–æ–æ–±—â–µ–Ω–∏–π: 4961
–û—Ç–∫—É–¥–∞: –ú–∏–Ω—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 5
|
mial –ø–∏—Å–∞–ª(–∞): –í–æ–∑–º–æ–∂–Ω–æ –ø—Ä–æ–±–ª–µ–º–∞ –≤ —Ç–æ–º —á—Ç–æ —Ç–µ—Ä—è–µ—Ç –ª–µ–Ω—Ç—É. –ï—Å–ª–∏ –±—ã —Ç–µ—Ä—è–ª –ª–µ–Ω—Ç—É - —Å—ä–µ–∑–∂–∞–ª–∏ –±—ã –∫–æ–æ—Ä–¥–∏–Ω–∞—Ç—ã, –∞ —ç—Ç–æ–≥–æ –Ω–µ –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç. –í—Ä–µ–º–µ–Ω–Ω–æ –ø–æ–±–æ—Ä–æ–ª –ø—Ä–æ–±–ª–µ–º—É, –≤—ã—Å—Ç–∞–≤–∏–≤ –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ–µ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ –¥–≤–∏–≥–∞—Ç–µ–ª—è –≤ 3 –≤–æ–ª—å—Ç–∞. –ö–∞—Ä–µ—Ç–∫–∞ —Å—Ç–∞–ª–∞ —Ç—Ä–æ–≥–∞—Ç—å—Å—è –ø–ª–∞–≤–Ω–æ, –±–µ–∑ —Ö–∞—Ä–∞–∫—Ç–µ—Ä–Ω–æ–≥–æ —Å—Ç—É–∫–∞, –Ω—É –∏ —Å—Ä—ã–≤—ã –µ—Å—Ç–µ—Å—Ç–≤–µ–Ω–Ω–æ –ø—Ä–µ–∫—Ä–∞—Ç–∏–ª–∏—Å—å. –°—Ä—ã–≤ –Ω–∞–±–ª—é–¥–∞–µ—Ç—Å—è —Ç–æ–≥–¥–∞, –∫–æ–≥–¥–∞ –≤ –ø–µ—Ä–≤–æ–Ω–∞—á–∞–ª—å–Ω—ã–π –º–æ–º–µ–Ω—Ç –º–æ—Ç–æ—Ä –ø–æ–ª—É—á–∞–µ—Ç —Ç—ã—á–æ–∫, –∫–∞–∫ —è –ø–æ–Ω–∏–º–∞—é, –¥–ª—è —Å—Ç—Ä–∞–≥–∏–≤–∞–Ω–∏—è —Å –º–µ—Å—Ç–∞, –∏ –µ—Å–ª–∏ –≤ —Ä–µ–∑—É–ª—å—Ç–∞—Ç–µ —ç—Ç–æ–≥–æ —Ç—ã—á–∫–∞ –±—ã–ª–∞ –ø—Ä–µ–≤—ã—à–µ–Ω–∞ –∫–∞–∫–∞—è-—Ç–æ –ø–æ—Ä–æ–≥–æ–≤–∞—è —Å–∫–æ—Ä–æ—Å—Ç—å - –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç —Å—Ä—ã–≤. –ê –ø–æ—Å–∫–æ–ª—å–∫—É –ø–æ–¥–≤–∏–∂–Ω–∞—è —Å–∏—Å—Ç–µ–º–∞ —É –º–µ–Ω—è –¥–æ–≤–æ–ª—å–Ω–æ –ª—ë–≥–∫–∞—è, –∞ —Ç—ã—á–æ–∫ –∏–¥—ë—Ç –º–∞–∫—Å–∏–º–∞–ª—å–Ω—ã–º –≤—ã—Å—Ç–∞–≤–ª–µ–Ω–Ω—ã–º –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ–º –∏ –¥–æ–≤–æ–ª—å–Ω–æ –ø—Ä–æ–¥–æ–ª–∂–∏—Ç–µ–ª—å–Ω–æ–µ –≤—Ä–µ–º—è - –ø–æ–ª—É—á–∞–µ–º —Å—Ä—ã–≤. –ü–æ—ç—Ç–æ–º—É, —Å–∏–ª—å–Ω–æ –æ–≥—Ä–∞–Ω–∏—á–∏–≤ –≤–µ—Ä—Ö–Ω–µ–µ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ –º–æ—Ç–æ—Ä–∞ —è —Ä–µ—à–∏–ª –æ–¥–Ω—É –ø—Ä–æ–±–ª–µ–º—É, –Ω–æ –ø–æ–ª—É—á–∏–ª –¥—Ä—É–≥—É—é - –Ω–µ–≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç—å –ø–æ–¥–Ω—è—Ç—å—Å—è –≤—ã—à–µ –∫–∞–∫–æ–π-—Ç–æ –æ–ø—Ä–µ–¥–µ–ª—ë–Ω–Ω–æ–π —Å–∫–æ—Ä–æ—Å—Ç–∏. –¢—É—Ç–∞ –Ω–∞–¥–æ–±–Ω–æ —Å –ø—Ä–æ—à–∏–≤–∫–æ–π –º—É–¥—Ä–∏—Ç—å, —è AlphaCrow –≤ –ª–∏—á–∫—É –Ω–∞–ø–∏—Å–∞–ª, –Ω–æ –æ–Ω –ø–æ–∫–∞ –º–æ–ª—á–∏—Ç. ---------- –¢–µ–º –≤—Ä–µ–º–µ–Ω–µ–º, –ø–µ—Ä–≤—ã–π —Ç–µ—Å—Ç —Å –Ω–æ—Ä–º–∞–ª—å–Ω—ã–º —Ä–µ–∑—É–ª—å—Ç–∞—Ç–æ–º —É–∂–µ –≥–æ—Ç–æ–≤. –ü–µ—Ä–µ–¥ —ç—Ç–∏–º –≤—ã—è—Å–Ω–∏–ª–æ—Å—å, —á—Ç–æ —è —Ç–æ–∂–µ —É–º–µ—é –ø—Ä–µ–≤—Ä–∞—â–∞—Ç—å –ª–∞–∑–µ—Ä–Ω—ã–µ —Å–≤–µ—Ç–æ–¥–∏–æ–¥—ã –≤ –æ–±—ã—á–Ω—ã–µ, –ø—Ä–∏—á—ë–º –∫–∞–∫ –∏ mial - —Å–∞–º –Ω–µ –∑–Ω–∞—é –∫–∞–∫.  –ë–ª–∞–≥–æ, –∫—É–ø–ª–µ–Ω–æ –±—ã–ª–æ —Å –∑–∞–ø–∞—Å–æ–º. –¢–æ—á–Ω–æ—Å—Ç–∏ —Ä–µ–º–µ–Ω–Ω–æ–≥–æ –ø—Ä–∏–≤–æ–¥–∞ –≤–ø–æ–ª–Ω–µ –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ –±—É–¥–µ—Ç –∏ –¥–ª—è —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è 1200DPI, –∑–∞ —á—Ç–æ —è —Å–∏–ª—å–Ω–æ –ø–µ—Ä–µ–∂–∏–≤–∞–ª, –∏ —É–∂–µ –¥–∞–∂–µ –Ω–∞—á–∞–ª –ø—Ä–∏—Å–º–∞—Ç—Ä–∏–≤–∞—Ç—å —É –∫–∏—Ç–∞–π—Ü–µ–≤ —à–∞–≥–æ–≤–∏–∫ —Å 0.9 –≥—Ä–∞–¥—É—Å–∞. –ü–æ–∫–∞ –µ–≥–æ –ø–æ–∫—É–ø–∞—Ç—å –Ω–µ –±—É–¥—É. –Ý–µ–∑—É–ª—å—Ç–∞—Ç—ã –Ω–∞ —Ñ–æ—Ç–æ, —Ç–∞–º –æ—á–µ–Ω—å —Ö–æ—Ä–æ—à–æ –≤–∏–¥–Ω–æ —à—Ç—Ä–∏—Ö–∏ –∑–∞—Å–≤–µ—Ç–∫–∏ –∏ –∏—Ö —Ä–∞–≤–Ω–æ–º–µ—Ä–Ω–æ—Å—Ç—å.  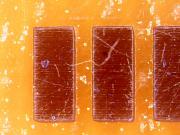 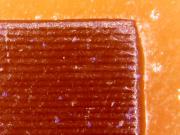
_________________
–ü—Ä–∏–±–æ—Ä, –∑–∞—â–∏—â—ë–Ω–Ω—ã–π –ø—Ä–µ–¥–æ—Ö—Ä–∞–Ω–∏—Ç–µ–ª–µ–º, —Å–≥–æ—Ä–∞–µ—Ç –ø–µ—Ä–≤—ã–º, –∑–∞—â–∏—Ç–∏–≤ –ø—Ä–µ–¥–æ—Ö—Ä–∞–Ω–∏—Ç–µ–ª—å. –ó–∞–∫–æ–Ω –ú–µ—Ä—Ñ–∏.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
AlphaCrow
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –¥–µ–∫ 08, 2015 14:01:17 |
|
| –í—Å—Ç–∞–ª –Ω–∞ –ª–∞–ø—ã |
 |
–ö–∞—Ä–º–∞: 38
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 471
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –∞–ø—Ä 29, 2011 13:01:00
–°–æ–æ–±—â–µ–Ω–∏–π: 127
–û—Ç–∫—É–¥–∞: –≥. –¢–∞–≥–∞–Ω—Ä–æ–≥, –Ý–æ—Å—Ç–æ–≤—Å–∫–æ–π –æ–±–ª.
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 7
|
–ü–æ –ø–æ–≤–æ–¥—É —Å—Ä—ã–≤–æ–≤ —Å–∫–æ—Ä–æ—Å—Ç–∏. –í —Ä–∏–¥–º–∏ —è –∫—Ä–∞—Ç–∫–æ –∏–∑–ª–æ–∂–∏–ª –º–µ—Ç–æ–¥–∏–∫—É –Ω–∞—Å—Ç—Ä–æ–π–∫–∏ —Ä–µ–≥—É–ª—è—Ç–æ—Ä–∞. –¢–µ–ø–µ—Ä—å –Ω–µ–º–Ω–æ–≥–æ –ø–æ–ø–æ–¥—Ä–æ–±–Ω–µ–µ. –ï—Å–ª–∏ –∫—Ç–æ —Å–º–æ—Ç—Ä–µ–ª –∏—Å—Ö–æ–¥–Ω–∏–∫–∏, —Ç–æ –≤ –º–æ–¥—É–ª–µ "src\capture.c" –µ—Å—Ç—å —Ñ—É–Ω–∫—Ü–∏—è - SpeedRegulator, –≤ –∫–æ—Ç–æ—Ä–æ–π —Å–æ–±—Å—Ç–≤–µ–Ω–Ω–æ –∏ –∑–∞–ª–æ–∂–µ–Ω–∞ –æ—Å–Ω–æ–≤–Ω–∞—è —Ñ–æ—Ä–º—É–ª–∞ –ü–ò–î —Ä–µ–≥—É–ª—è—Ç–æ—Ä–∞ (–µ—Å–ª–∏ –±—ã—Ç—å —Ç–æ—á–Ω—ã–º, —Ç–æ —ç—Ç–æ –ü–ò —Ä–µ–≥—É–ª—è—Ç–æ—Ä —Ç.–∫. –¥–∏—Ñ—Ñ –∫–æ—ç—Ñ—Ñ–∏—Ü–∏–µ–Ω—Ç —è –≤—ã–±—Ä–æ—Å–∏–ª –ø–æ –ø—Ä–∏—á–∏–Ω–µ –µ–≥–æ –ø—Ä–∞–∫—Ç–∏—á–µ—Å–∫–æ–π –±–µ—Å–ø–æ–ª–µ–∑–Ω–æ—Å—Ç–∏). –ö–æ–¥: vm = ((serr*k_prp)+(ival*k_int))/k_com + pwmmin;
if (vm>pwmmax) vm=pwmmax; // –û–≥—Ä–∞–Ω–∏—á–µ–Ω–∏–µ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏—è –Ω–∞ –¥–≤–∏–≥–∞—Ç–µ–ª–µ.
VoltageMotor=vm; PWM_Set(vm); // –£—Å—Ç–∞–Ω–æ–≤–∏—Ç—å —Ä–∞—Å—Å—á–∏—Ç–∞–Ω–Ω–æ–µ –∑–Ω–∞—á–µ–Ω–∏–µ.
–ö—Ä–æ–º–µ –æ—Å–Ω–æ–≤–Ω–æ–π —Ñ–æ—Ä–º—É–ª—ã –ø—Ä–∏—Å—É—Ç—Å—Ç–≤—É–µ—Ç –∏ –æ–≥—Ä–∞–Ω–∏—á–∏—Ç–µ–ª—å –≤—ã—Ö–æ–¥–Ω–æ–≥–æ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏—è. –ú–∏–Ω–∏–º–∞–ª—å–Ω–æ–µ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ –Ω—É–∂–Ω–æ –¥–ª—è –∫–æ–º–ø–µ–Ω—Å–∞—Ü–∏–∏ —Å–∏–ª—ã —Ç—Ä–µ–Ω–∏—è —Å—Ç—Ä–∞–≥–∏–≤–∞–Ω–∏—è –º–æ—Ç–æ—Ä–∞, –∞ –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ–µ - –¥–ª—è –ø–æ–≤—ã—à–µ–Ω–∏—è —É—Å—Ç–æ–π—á–∏–≤–æ—Å—Ç–∏ —Ä–µ–≥—É–ª–∏—Ä–æ–≤–∞–Ω–∏—è. –¢–∞–∫ —á—Ç–æ, –æ—Å–æ–±–æ–≥–æ –Ω–∞—á–∞–ª—å–Ω–æ–≥–æ "—Ç—ã—á–∫–∞" —Ç–∞–º –Ω–µ—Ç. –û–Ω –æ–±—Ä–∞–∑—É–µ—Ç—Å—è –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏ –ø–æ —É—Å–ª–æ–≤–∏—è–º —Ä–µ–≥—É–ª–∏—Ä–æ–≤–∞–Ω–∏—è: —Å–∏–≥–Ω–∞–ª –æ—à–∏–±–∫–∏ –º–∞–∫—Å–∏–º–∞–ª—å–Ω—ã–π --> –≤—ã—Ö–æ–¥–Ω–æ–π —Å–∏–≥–Ω–∞–ª –º–∞–∫—Å–∏–º–∞–ª—å–Ω—ã–π. –î—Ä—É–≥–æ–µ –¥–µ–ª–æ, –º–æ–∂–Ω–æ –ø—Ä–∏–Ω—è—Ç—å —Å–ø–µ—Ü –º–µ—Ä—ã –ø–æ –æ–≥—Ä–∞–Ω–∏—á–µ–Ω–∏—é –Ω–∞–ø—Ä—è–∂–µ–Ω–∏—è –Ω–∞ –Ω–∞—á–∞–ª—å–Ω–æ–º —É—á–∞—Å—Ç–∫–µ, –Ω–æ —ç—Ç–æ –Ω–∞–¥–æ —ç–∫—Å–ø–µ—Ä–∏–º–µ–Ω—Ç–∏—Ä–æ–≤–∞—Ç—å. –¢–∞–∫ —á—Ç–æ –Ω–∞ —Å–µ–≥–æ–¥–Ω—è—à–Ω–∏–π –º–æ–º–µ–Ω—Ç –≤—ã—Ä–∏—Å–æ–≤—ã–≤–∞–µ—Ç—Å—è —Å–ª–µ–¥—É—é—â–∞—è –º–µ—Ç–æ–¥–∏–∫–∞. 1. –í –Ω–∞—Å—Ç—Ä–æ–π–∫–∞—Ö –≤—ã—Å—Ç–∞–≤–∏—Ç—å —Ä–∞–±–æ—á–∏–µ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏—è –ø–∏—Ç–∞–Ω–∏—è –¥–≤–∏–≥–∞—Ç–µ–ª—è: V–¥–≤ - –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ –ø–∏—Ç–∞–Ω–∏—è –¥—Ä–∞–π–≤–µ—Ä–∞ –¥–≤–∏–≥–∞—Ç–µ–ª—è. V–º–∏–Ω - –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ —á—É—Ç—å –º–µ–Ω—å—à–µ–µ —á–µ–º –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ —Å—Ç—Ä–∞–≥–∏–≤–∞–Ω–∏—è. V–º–∞–∫—Å - –ù–∞–ø—Ä—è–∂–µ–Ω–∏–µ, –ø—Ä–∏ –∫–æ—Ç–æ—Ä–æ–º –æ–±–µ—Å–ø–µ—á–∏–≤–∞–µ—Ç—Å—è —Ç—Ä–µ–±—É–µ–º–∞—è –º–∞–∫—Å–∏–º–∞–ª—å–Ω–∞—è —Å–∫–æ—Ä–æ—Å—Ç—å –∫–∞—Ä–µ—Ç–∫–∏. 2. –í –Ω–∞—Å—Ç—Ä–æ–π–∫–∞—Ö –∫–æ—ç—Ñ—Ñ–∏—Ü–∏–µ–Ω—Ç–æ–≤, —Å–Ω–∞—á–∞–ª–∞ —Å–±—Ä–∞—Å—ã–≤–∞–µ–º –∏—Ö –≤ –º–∏–Ω–∏–º–∞–ª—å–Ω—ã–µ –∑–Ω–∞—á–µ–Ω–∏—è. –ü–µ—Ä–≤—ã–º –Ω–∞—Å—Ç—Ä–∞–∏–≤–∞–µ–º –ø—Ä–æ–ø–æ—Ä—Ü–∏–æ–Ω–∞–ª—å–Ω—ã–π, –¥–æ–±–∏–≤–∞—è—Å—å –ø–æ–¥–¥–µ—Ä–∂–∞–Ω–∏—è —Å–∫–æ—Ä–æ—Å—Ç–∏ –±–µ–∑ –Ω–∞–ª–∏—á–∏—è –≤–∏–±—Ä–∞—Ü–∏–π (–∞–≤—Ç–æ–∫–æ–ª–µ–±–∞–Ω–∏–π). –ó–∞—Ç–µ–º —É–≤–µ–ª–∏—á–∏–≤–∞–µ–º –∏–Ω—Ç–µ–≥—Ä–∞–ª—å–Ω—ã–π - –¥–æ –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ –ø—Ä—è–º–æ–ª–∏–Ω–µ–π–Ω–æ–≥–æ –≥—Ä–∞—Ñ–∏–∫–∞. –ö —Å–æ–∂–∞–ª–µ–Ω–∏—è –≤ –±–ª–∏–∂–∞–π—à–µ–µ –≤—Ä–µ–º—è —Å–∞–º–æ–º—É –∑–∞–Ω—è—Ç—å—Å—è –Ω–µ –ø–æ–ª—É—á–∏—Ç—Å—è, —Ç–∞–∫ —á—Ç–æ –ø–æ–∫–∞ —Å–∞–º–∏.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Seriyvolk
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –¥–µ–∫ 08, 2015 15:08:20 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
|
–ö–∞—Ä–º–∞: 93
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2154
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –º–∞–π 05, 2012 20:19:55
–°–æ–æ–±—â–µ–Ω–∏–π: 4961
–û—Ç–∫—É–¥–∞: –ú–∏–Ω—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
AlphaCrow –ø–∏—Å–∞–ª(–∞): –¥–∏—Ñ—Ñ –∫–æ—ç—Ñ—Ñ–∏—Ü–∏–µ–Ω—Ç —è –≤—ã–±—Ä–æ—Å–∏–ª –ø–æ –ø—Ä–∏—á–∏–Ω–µ –µ–≥–æ –ø—Ä–∞–∫—Ç–∏—á–µ—Å–∫–æ–π –±–µ—Å–ø–æ–ª–µ–∑–Ω–æ—Å—Ç–∏ –¢–∞–∫ –æ—Ç —ç—Ç–æ–≥–æ —Ç—ã—á—ë–∫ –∏ –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç. –ù–µ —É—á–∏—Ç—ã–≤–∞–µ—Ç—Å—è —Å–∫–æ—Ä–æ—Å—Ç—å —Ä–∞–∑–≥–æ–Ω–∞ –∫–∞—Ä–µ—Ç–∫–∏, –∏ –æ—à–∏–±–∫–∞ –ø—Ä–æ–¥–æ–ª–∂–∞–µ—Ç –Ω–∞—Ä–∞—Å—Ç–∞—Ç—å –≤–ø–ª–æ—Ç—å –¥–æ –Ω–∞–±–æ—Ä–∞ –ø–æ–ª–Ω–æ–π —Å–∫–æ—Ä–æ—Å—Ç–∏. –ê –¥–∞–ª—å—à–µ –¥–µ–≤–∞—Ç—å—Å—è –Ω–µ–∫—É–¥–∞, –ø–æ–∫–∞ –æ—à–∏–±–∫–∞ —É–º–µ–Ω—å—à–∏—Ç—Å—è, –∫–∞—Ä–µ—Ç–∫–∞ —É—Å–ø–µ–≤–∞–µ—Ç —Ä–∞–∑–æ–≥–Ω–∞—Ç—å—Å—è –∑–µ–ª–æ —Å–∏–ª—å–Ω–µ–µ. –ú–æ–∂–µ—Ç —Ç–∞–∫–∏ –≤–µ—Ä–Ω—É—Ç—å —ç—Ç–æ—Ç –¥–∏—Ñ—Ñ. –∫–æ—ç—Ñ—Ñ–∏—Ü–∏–µ–Ω—Ç? –ò —á—Ç–æ —Ç–∞–∫–æ–µ "PID_C 1.000" –≤ —Ñ–∞–π–ª–µ "hldi.ini"? –î–∞, –∏ –∫–∞–∫ –Ω–∞—Å—á—ë—Ç —Ç–∞–∫–∏ –≤–≤–µ—Å—Ç–∏ —Ç–∞–∫–∏ –∞–∫—Ç–∏–≤–Ω–æ–µ —Ç–æ—Ä–º–æ–∂–µ–Ω–∏–µ? –ò–±–æ –∫–æ–≥–¥–∞ –∑–∞–¥–∏—Ä–∞–µ—à—å —Å–∫–æ—Ä–æ—Å—Ç—å, –∫–∞—Ä–µ—Ç–∫–∞ –ø–æ –∏–Ω–µ—Ä—Ü–∏–∏ —É—Å–ø–µ–≤–∞–µ—Ç –ø—Ä–æ–µ—Ö–∞—Ç—å —Å–∏–ª—å–Ω–æ –±–æ–ª—å—à–µ –æ—Ç–≤–µ–¥—ë–Ω–Ω—ã—Ö –µ–π 10-15 –º–º. –î–ª—è —Ç–∞–∫–æ–π –ø–µ—Ä–µ–¥–µ–ª–∫–∏ –Ω—É–∂–Ω–æ –±—É–¥–µ—Ç —Å–ª–µ–≥–∫–∞ –ø–æ–ø—Ä–∞–≤–∏—Ç—å –∫–æ–¥ –∏ —á—É—Ç–æ–∫ –∏–∑–º–µ–Ω–∏—Ç—å –¥—Ä–∞–π–≤–µ—Ä (—Å–¥–µ–ª–∞—Ç—å –≤—Ö–æ–¥—ã –æ–ø—Ç–æ–¥—Ä–∞–π–≤–µ—Ä–æ–≤ –Ω–µ–∑–∞–≤–∏—Å–∏–º–æ —É–ø—Ä–∞–≤–ª—è–µ–º—ã–º–∏).
_________________
–ü—Ä–∏–±–æ—Ä, –∑–∞—â–∏—â—ë–Ω–Ω—ã–π –ø—Ä–µ–¥–æ—Ö—Ä–∞–Ω–∏—Ç–µ–ª–µ–º, —Å–≥–æ—Ä–∞–µ—Ç –ø–µ—Ä–≤—ã–º, –∑–∞—â–∏—Ç–∏–≤ –ø—Ä–µ–¥–æ—Ö—Ä–∞–Ω–∏—Ç–µ–ª—å. –ó–∞–∫–æ–Ω –ú–µ—Ä—Ñ–∏.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Alxim
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –¥–µ–∫ 09, 2015 14:22:19 |
|
| –û—Ç–∫—Ä—ã–ª –≥–ª–∞–∑–∞ |
 |
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –¥–µ–∫ 06, 2011 15:26:52
–°–æ–æ–±—â–µ–Ω–∏–π: 42
–û—Ç–∫—É–¥–∞: –≥.–ë–µ–ª–æ–≥–æ—Ä—Å–∫ –ê–º—É—Ä—Å–∫–æ–π –æ–±–ª–∞—Å—Ç–∏
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 3
|
–ù–µ –¥–æ–∂–¥–∞–ª—Å—è —è –∫–æ—Ä–æ—á–µ –ø–æ—Å—ã–ª–∫–∏ —Å HCPL3120, –ø–æ—à–µ–ª –≤ –º–∞–≥–∞–∑–∏–Ω –∏ –∫—É–ø–∏–ª TLP250. –ú–µ—Ö–∞–Ω–∏–∫–∞ –∑–∞—Ä–∞–±–æ—Ç–∞–ª–∞ –æ—Ç–ª–∏—á–Ω–æ –ù–∏–∫–∞–∫–∏—Ö —Ä—ã–≤–∫–æ–≤ –∏ —Ç–æ–ª—á–∫–æ–≤. –ë—É–¥—É –∂–¥–∞—Ç—å –ª–∏–Ω–∑—É –¥–ª—è –ª–∞–∑–µ—Ä–∞ . –ë–µ–∑ –Ω–µ–µ –Ω–µ –∑–Ω–∞—é –∫–∞–∫ —Ñ–æ–∫—É—Å–Ω–æ–µ —Ä–∞—Å—Å—Ç–æ—è–Ω–∏–µ –ø–æ–¥–æ–±—Ä–∞—Ç—å –¥–æ —Å—Ç–æ–ª–∞. –ö–∞–∫ —Ç–æ —Ç–∞–∫ –ø–æ–∫–∞  https://yadi.sk/i/ZoW4oPs-m6u6F https://yadi.sk/i/ZoW4oPs-m6u6F
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Sailanser
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –¥–µ–∫ 09, 2015 15:26:05 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
 |
–ö–∞—Ä–º–∞: 39
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 723
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —Ñ–µ–≤ 01, 2006 22:29:02
–°–æ–æ–±—â–µ–Ω–∏–π: 3111
–û—Ç–∫—É–¥–∞: –≥.–Ý–æ—Å—Ç–æ–≤-–Ω–∞-–î–æ–Ω—É
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
Alxim –ø–∏—Å–∞–ª(–∞): –ù–µ –¥–æ–∂–¥–∞–ª—Å—è —è –°–º–æ—Ç—Ä—é —Ç–∞–∫–∏ –ø–æ–¥–æ–±—Ä–∞–ª–∏ –∫–æ—ç—Ñ—Ñ–∏—Ü–∏–µ–Ω—Ç –Ω–∞ —Ä–µ–º–Ω–µ –∏ —à–ø—É–ª–∏ 
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Alxim
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –¥–µ–∫ 09, 2015 16:03:31 |
|
| –û—Ç–∫—Ä—ã–ª –≥–ª–∞–∑–∞ |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –¥–µ–∫ 06, 2011 15:26:52
–°–æ–æ–±—â–µ–Ω–∏–π: 42
–û—Ç–∫—É–¥–∞: –≥.–ë–µ–ª–æ–≥–æ—Ä—Å–∫ –ê–º—É—Ä—Å–∫–æ–π –æ–±–ª–∞—Å—Ç–∏
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
Sailanser –ø–∏—Å–∞–ª(–∞): Alxim –ø–∏—Å–∞–ª(–∞): –ù–µ –¥–æ–∂–¥–∞–ª—Å—è —è –°–º–æ—Ç—Ä—é —Ç–∞–∫–∏ –ø–æ–¥–æ–±—Ä–∞–ª–∏ –∫–æ—ç—Ñ—Ñ–∏—Ü–∏–µ–Ω—Ç –Ω–∞ —Ä–µ–º–Ω–µ –∏ —à–ø—É–ª–∏ –ù–µ –Ω–µ –ø–æ–¥–±–∏—Ä–∞–ª. –•–æ—á—É –≤—Å–µ –¥–æ –∫—É—á–∏ —Å–æ–±—Ä–∞—Ç—å –∏ –ø–æ—Ç–æ–º —É–∂–µ –±—É–¥—É –Ω–∞—Å—Ç—Ä–∞–∏–≤–∞—Ç—å
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
bifurkas
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –¥–µ–∫ 09, 2015 17:35:27 |
|
| –ü—Ä–æ—Ä–µ–∑–∞–ª–∏—Å—å –∑—É–±—ã |
|
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 85
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç —Ñ–µ–≤ 02, 2010 21:25:18
–°–æ–æ–±—â–µ–Ω–∏–π: 223
–û—Ç–∫—É–¥–∞: –ù.–ù–æ–≤–≥–æ—Ä–æ–¥
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–í–æ–ø—Ä–æ—Å –µ—â—ë –æ–¥–∏–Ω: –∏–Ω–¥—É–∫—Ç–∏–≤–Ω–æ—Å—Ç–∏ –≤ —Ü–µ–ø–∏ –º–æ—Ç–æ—Ä–∞, –æ–±–æ–∑–Ω–∞—á–µ–Ω–Ω—ã–µ –Ω–∞ —Å—Ö–µ–º–µ 100 - —ç—Ç–æ 100 –º–∏–∫—Ä–æ–ì–µ–Ω—Ä–∏?
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
AlphaCrow
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –¥–µ–∫ 09, 2015 20:20:19 |
|
| –í—Å—Ç–∞–ª –Ω–∞ –ª–∞–ø—ã |
|
–ö–∞—Ä–º–∞: 38
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 471
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –∞–ø—Ä 29, 2011 13:01:00
–°–æ–æ–±—â–µ–Ω–∏–π: 127
–û—Ç–∫—É–¥–∞: –≥. –¢–∞–≥–∞–Ω—Ä–æ–≥, –Ý–æ—Å—Ç–æ–≤—Å–∫–æ–π –æ–±–ª.
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Seriyvolk
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –¥–µ–∫ 09, 2015 20:33:00 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
|
–ö–∞—Ä–º–∞: 93
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2154
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –º–∞–π 05, 2012 20:19:55
–°–æ–æ–±—â–µ–Ω–∏–π: 4961
–û—Ç–∫—É–¥–∞: –ú–∏–Ω—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
AlphaCrow, –∫–∞–∫ –Ω–∞—Å—á—ë—Ç –º–æ–∏—Ö –ø—Ä–µ–¥—ã–¥—É—â–∏—Ö –≤–æ–ø—Ä–æ—Å–æ–≤?
_________________
–ü—Ä–∏–±–æ—Ä, –∑–∞—â–∏—â—ë–Ω–Ω—ã–π –ø—Ä–µ–¥–æ—Ö—Ä–∞–Ω–∏—Ç–µ–ª–µ–º, —Å–≥–æ—Ä–∞–µ—Ç –ø–µ—Ä–≤—ã–º, –∑–∞—â–∏—Ç–∏–≤ –ø—Ä–µ–¥–æ—Ö—Ä–∞–Ω–∏—Ç–µ–ª—å. –ó–∞–∫–æ–Ω –ú–µ—Ä—Ñ–∏.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
mial
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –¥–µ–∫ 09, 2015 21:53:12 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
|
–ö–∞—Ä–º–∞: 95
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2204
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —è–Ω–≤ 06, 2010 23:31:56
–°–æ–æ–±—â–µ–Ω–∏–π: 3254
–û—Ç–∫—É–¥–∞: –ë–æ—Ä–æ–≤–∏—á–∏, –ù–æ–≤–≥. –æ–±–ª.
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 1
|
|
Alxim –º–Ω–µ –ø–æ–∫–∞–∑–∞–ª–æ—Å—å –∏–ª–∏ —Ç–∞–∫ –∏ –µ—Å—Ç—å, —á—Ç–æ —É —Ç–µ–±—è –ø—Ä–∏ —Å–º–µ–Ω–µ –Ω–∞–ø—Ä–∞–≤–ª–µ–Ω–∏—è –∫–∞—Ä–µ—Ç–∫–∞ –∫–∞–∫ —Ç–æ –∑–∞–º–∏—Ä–∞–µ—Ç –Ω–∞ –¥–æ–ª—é —Å–µ–∫—É–Ω–¥—ã?
_________________
–ü—Ä–æ—Ç–æ—Ç–∏–ø—ã –ø–µ—á–∞—Ç–Ω—ã—Ö –ø–ª–∞—Ç –Ω–∞ –∑–∞–∫–∞–∑ https://radiokot.ru/forum/viewtopic.php?f=54&t=122701
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
AlphaCrow
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –¥–µ–∫ 09, 2015 22:51:53 |
|
| –í—Å—Ç–∞–ª –Ω–∞ –ª–∞–ø—ã |
|
–ö–∞—Ä–º–∞: 38
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 471
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –∞–ø—Ä 29, 2011 13:01:00
–°–æ–æ–±—â–µ–Ω–∏–π: 127
–û—Ç–∫—É–¥–∞: –≥. –¢–∞–≥–∞–Ω—Ä–æ–≥, –Ý–æ—Å—Ç–æ–≤—Å–∫–æ–π –æ–±–ª.
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
Seriyvolk писал(а): AlphaCrow писал(а): дифф коэффициент я выбросил по причине его практической бесполезности Так от этого тычёк и происходит. ... Это вряд ли, при «неточной» настройке срывы иногда происходят даже при установившейся скорости. С этим надо разбираться. Seriyvolk писал(а): ...И что такое "PID_C 1.000" в файле "hldi.ini"? Это общий масштабный коэффициент. С целью сохранения высокого быстродействия, для вычислений используется целочисленная арифметика, поэтому все коэффициенты приведены к целому виду. Этим коэффициентом можно задавать точность расчёта. Seriyvolk писал(а): Да, и как насчёт таки ввести таки активное торможение? Ибо когда задираешь скорость, каретка по инерции успевает проехать сильно больше отведённых ей 10-15 мм. Тут как посмотреть. Можно получить неслабый удар при резком торможении, всё начнёт вибрировать. Кроме того, всё равно необходимо поле для разгона, и эти 10-15мм им и являются.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
|
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 43 –∏–∑ 507
|
[ –°–æ–æ–±—â–µ–Ω–∏–π: 10133 ] |
... , , , , , , ... |
–ö—Ç–æ —Å–µ–π—á–∞—Å –Ω–∞ —Ñ–æ—Ä—É–º–µ |
–°–µ–π—á–∞—Å —ç—Ç–æ—Ç —Ñ–æ—Ä—É–º –ø—Ä–æ—Å–º–∞—Ç—Ä–∏–≤–∞—é—Ç: –Ω–µ—Ç –∑–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω–Ω—ã—Ö –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª–µ–π –∏ –≥–æ—Å—Ç–∏: 12 |
|
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –Ω–∞—á–∏–Ω–∞—Ç—å —Ç–µ–º—ã
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –æ—Ç–≤–µ—á–∞—Ç—å –Ω–∞ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ —É–¥–∞–ª—è—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –¥–æ–±–∞–≤–ª—è—Ç—å –≤–ª–æ–∂–µ–Ω–∏—è
|
|
|