|
–§–æ—Ä—É–º –Ý–∞–¥–∏–æ–ö–æ—Ç • –ü—Ä–æ—Å–º–æ—Ç—Ä —Ç–µ–º—ã - –õ–∞–∑–µ—Ä–Ω–∞—è —É—Å—Ç–∞–Ω–æ–≤–∫–∞ –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ –æ—Ç AlphaCrow
–°–æ–æ–±—â–µ–Ω–∏—è –±–µ–∑ –æ—Ç–≤–µ—Ç–æ–≤ | –ê–∫—Ç–∏–≤–Ω—ã–µ —Ç–µ–º—ã
 
|
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 181 –∏–∑ 506
|
[ –°–æ–æ–±—â–µ–Ω–∏–π: 10105 ] |
... , , , , , , ... |
| –ê–≤—Ç–æ—Ä |
–°–æ–æ–±—â–µ–Ω–∏–µ |
|
psychos
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. HL  –î–æ–±–∞–≤–ª–µ–Ω–æ: –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –º–∞—Ä 16, 2017 22:03:36 |
|
| –í—ã–º–æ–≥–∞—Ç–µ–ª—å –ø—Ä–∏–ø–æ—è |
 |
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 171
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç —Å–µ–Ω 23, 2008 19:36:10
–°–æ–æ–±—â–µ–Ω–∏–π: 538
–û—Ç–∫—É–¥–∞: –ú–∞–≥–Ω–∏—Ç–æ–≥–æ—Ä—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
Serj_K –ø–∏—Å–∞–ª(–∞): Seriyvolk –ø–∏—Å–∞–ª(–∞): –ù–æ –∏ –∫–æ–Ω—Ü–µ–≤–∏–∫–∏, —Ö–æ—Ç—è –±—ã —Å—Ç–æ–ª–∞, —Å—á–∏—Ç–∞—é –¥–∞–ª–µ–∫–æ –Ω–µ –ª–∏—à–Ω–µ–π –æ–ø—Ü–∏–µ–π. –í –ø—Ä–∏–Ω—Ü–∏–ø–µ –º–æ–∂–Ω–æ –æ–±–æ–π—Ç–∏—Å—å –±–µ–∑ –∫–æ–Ω—Ü–µ–≤–∏–∫–∞ –ø–æ –•, –µ—Å–ª–∏ –æ–±—Ä–∞–±–∞—Ç—ã–≤–∞—Ç—å —Å–∏–≥–Ω–∞–ª —ç–Ω–∫–æ–¥–µ—Ä–∞ - –ø–µ—Ä–µ—Å—Ç–∞–ª –º–µ–Ω—è—Ç—å—Å—è, –∑–Ω–∞—á–∏—Ç —É–ø–æ—Ä. –ü–æ–ø—Ä–∞–≤–∫–∞, –∑–Ω–∞—á–∏—Ç —É–ø–æ—Ä —É–∂–µ —É–µ—Ö–∞–ª –≤–º–µ—Å—Ç–µ —Å –∫–∞—Ä–µ—Ç–∫–æ–π(–∫–æ–Ω–µ—á–Ω–æ –µ—Å–ª–∏ –∫–∞—Ä–µ—Ç–∫–∞ –µ–∑–¥–∏—Ç –Ω–µ –Ω–∞ –º–∞–ª—ã—Ö —Å–∫–æ—Ä–æ—Å—Ç—è—Ö). –ö–æ–Ω—Ü–µ–≤–∏–∫–∏ –Ω—É–∂–Ω–æ —Å—Ç–∞–≤–∏—Ç—å –∑–∞ –±–ª–∞–≥–æ–≤—Ä–µ–º–µ–Ω–Ω–æ, —á—Ç–æ–±—ã —Å —É—á—ë—Ç–æ–º –∞–≤–∞—Ä–∏–π–Ω–æ–≥–æ —Ç–æ—Ä–º–æ–∂–µ–Ω–∏—è –æ–±—ä–µ–∫—Ç –Ω–µ –¥–æ–µ–∑–∂–∞–ª –¥–æ —É–ø–æ—Ä –∫–∞–∫–æ–µ —Ç–æ —Ä–∞—Å—Å—á—ë—Ç–Ω–æ–µ —Ä–∞—Å—Å—Ç–æ—è–Ω–∏–µ. –ö–æ–Ω—Ü–µ–≤–∏–∫ –ø–æ Y –Ω—É–∂–µ–Ω –¥–ª—è –æ–ø—Ä–µ–¥–µ–ª–µ–Ω–∏—è –Ω—É–ª—è —Å—Ç–æ–ª–∞, –µ—Å–ª–∏ —Ç–∞–º –∏—Å–ø–æ–ª—å–∑—É—é—Ç—Å—è —à—Ç–∏—Ñ—Ç—ã –∞ –Ω–µ –º–∞–≥–Ω–∏—Ç–∏–∫–∏. –í–µ–¥—å –µ—Å–ª–∏ —à—Ç–∏—Ñ—Ç—ã –∏—Å–ø–æ–ª—å–∑—É—é—Ç—Å—è, —Ç–æ "–∫–∞–º–µ—Ä–æ–π –ø—Ä–∏—Ö–æ–¥–∏—Ç—Å—è –∏–Ω–∏—Ü–∏–∞–ª–∏–∑–∏—Ä–æ–≤–∞—Ç—å —Å—Ç–æ–ª", –∞ –ø–æ—Ç–æ–º —É–∂–µ —Å—Ç–∞–≤–∏—Ç—å –Ω–∞ —Å—Ç–æ–ª –ø–ª–∞—Ç—É.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
 |
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
Serj_K
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. HL –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –º–∞—Ä 17, 2017 11:24:08 |
|
–ö–∞—Ä–º–∞: 16
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 177
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –∞–ø—Ä 14, 2012 16:11:35
–°–æ–æ–±—â–µ–Ω–∏–π: 718
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
psychos –ø–∏—Å–∞–ª(–∞): –ü–æ–ø—Ä–∞–≤–∫–∞, –∑–Ω–∞—á–∏—Ç —É–ø–æ—Ä —É–∂–µ —É–µ—Ö–∞–ª –≤–º–µ—Å—Ç–µ —Å –∫–∞—Ä–µ—Ç–∫–æ–π(–∫–æ–Ω–µ—á–Ω–æ –µ—Å–ª–∏ –∫–∞—Ä–µ—Ç–∫–∞ –µ–∑–¥–∏—Ç –Ω–µ –Ω–∞ –º–∞–ª—ã—Ö —Å–∫–æ—Ä–æ—Å—Ç—è—Ö). –ö–æ–Ω—Ü–µ–≤–∏–∫–∏ –Ω—É–∂–Ω–æ —Å—Ç–∞–≤–∏—Ç—å –∑–∞ –±–ª–∞–≥–æ–≤—Ä–µ–º–µ–Ω–Ω–æ, —á—Ç–æ–±—ã —Å —É—á—ë—Ç–æ–º –∞–≤–∞—Ä–∏–π–Ω–æ–≥–æ —Ç–æ—Ä–º–æ–∂–µ–Ω–∏—è –æ–±—ä–µ–∫—Ç –Ω–µ –¥–æ–µ–∑–∂–∞–ª –¥–æ —É–ø–æ—Ä –∫–∞–∫–æ–µ —Ç–æ —Ä–∞—Å—Å—á—ë—Ç–Ω–æ–µ —Ä–∞—Å—Å—Ç–æ—è–Ω–∏–µ. –≠—Ç–æ –µ—Å–ª–∏ –æ–±–ª–∞—Å—Ç—å –ø–µ—á–∞—Ç–∏ –æ—Ç —É–ø–æ—Ä–∞ –∏ –¥–æ —É–ø–æ—Ä–∞. –ù–æ –≤—Å–µ–≥–¥–∞ –æ–±–ª–∞—Å—Ç—å –ø–µ—á–∞—Ç–∏ –º–µ–Ω—å—à–µ —Ö–æ–¥–∞ –∫–∞—Ä–µ—Ç–∫–∞. –ü–æ—ç—Ç–æ–º—É –ø—Ä–∏ —É—Å—Ç–∞–Ω–æ–≤–∫–µ –Ω–∞—á–∞–ª—å–Ω–æ–π –∫–æ–æ—Ä–¥–∏–Ω–∞—Ç—ã –• –∫–∞—Ä–µ—Ç–∫–∞ –º–æ–∂–µ—Ç —Ç–∞–∫ –∂–µ –∫–∞–∫ –∏ –≤ –ø—Ä–∏–Ω—Ç–µ—Ä–∞—Ö –¥–æ–µ—Ö–∞—Ç—å –¥–æ —É–ø–æ—Ä–∞ –º–µ–¥–ª–µ–Ω–Ω–æ. –ü–æ—ç—Ç–æ–º—É –¥–∞–∂–µ —Å —É—á—ë—Ç–æ–º –∞–≤–∞—Ä–∏–π–Ω–æ–≥–æ —Ç–æ—Ä–º–æ–∂–µ–Ω–∏—è –∫–∞—Ä–µ—Ç–∫–∞ –¥–æ —É–ø–æ—Ä–∞ –Ω–µ –¥–æ–µ–¥–µ—Ç. –ù–æ —Ç–∞–∫ –∫–∞–∫ –∫–æ–Ω—Ü–µ–≤–∏–∫ –ø–æ –• —É–∂–µ –ø—Ä–∏–º–µ–Ω—ë–Ω –∏ —Ä–∞–±–æ—Ç–∞–µ—Ç, —Ç–æ –º–æ–∂–Ω–æ —Ç–∞–∫ –∏ –æ—Å—Ç–∞–≤–∏—Ç—å.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
psychos
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: –í–ê–• –ö–∏—Ç–∞–π–õ–∞–∑–µ—Ä–∞, 20mW(0-50ma) PD: reverce 4.02v 23.314k –î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –º–∞—Ä 18, 2017 09:41:02 |
|
| –í—ã–º–æ–≥–∞—Ç–µ–ª—å –ø—Ä–∏–ø–æ—è |
|
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 171
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç —Å–µ–Ω 23, 2008 19:36:10
–°–æ–æ–±—â–µ–Ω–∏–π: 538
–û—Ç–∫—É–¥–∞: –ú–∞–≥–Ω–∏—Ç–æ–≥–æ—Ä—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 3
|
–¢—É—Ç –∏ —Ç—É—Ç –ø—Ä–µ–¥—ã–¥—É—â–∏–µ –∏–∑–º–µ—Ä—è–ª–∫–∏: –°–ø–æ–π–ª–µ—Ä
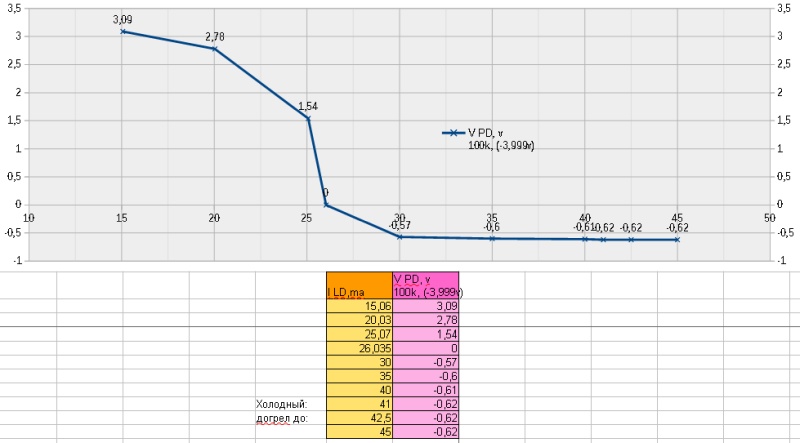 –î–æ–ª–∞–∂–∏–≤–∞—é: –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ –≤ —Ü–µ–ø–∏ —Ñ–æ—Ç–æ–¥–∏–æ–¥–∞ (-4,02–≤). –°–æ–ø—Ä–æ—Ç–∏–≤–ª–µ–Ω–∏–µ –≤ —Ü–µ–ø–∏ PD 23,314k —à–∞–≥ —É—Å—Ç–∞–Ω–æ–≤–∫–∏ —Ç–æ–∫–∞ 5m–ê –≤ –¥–∏–∞–ø–∞–∑–æ–Ω–µ 0-50–º–ê 
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
urez83
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. HL –î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –º–∞—Ä 18, 2017 12:59:39 |
|
| –≠–ª–µ–∫—Ç—Ä–∏—á–µ—Å–∫–∏–π –∫–æ—Ç |
 |
–ö–∞—Ä–º–∞: 8
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 443
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –æ–∫—Ç 31, 2014 18:38:30
–°–æ–æ–±—â–µ–Ω–∏–π: 1056
–û—Ç–∫—É–¥–∞: –Ý–æ—Å—Ç–æ–≤-–Ω–∞-–î–æ–Ω—É
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
mial –ø–∏—Å–∞–ª(–∞): –Æ–∑–∞—é —É—Å—Ç–∞–Ω–æ–≤–∫—É —É–∂–µ –ø–æ–ª—Ç–æ—Ä–∞ –≥–æ–¥–∞. –ú–µ–Ω—è –≤ –ø—Ä–∏–Ω—Ü–∏–ø–µ –≤—Å–µ —É—Å—Ç—Ä–∞–∏–≤–∞–µ—Ç. –ï—Å—Ç—å —Ç–∞–∫–∞—è —Ö–æ—Ç–µ–ª–∫–∞ –∏–ª–∏ –º–µ—á—Ç–∞, –Ω–∞–∑—ã–≤–∞–π—Ç–µ –∫–∞–∫ —Ö–æ—Ç–∏—Ç–µ. –•–æ—Ç–µ–ª–æ—Å—å –±—ã —á—Ç–æ –±—ã –≤ –ø—Ä–æ–≥—Ä–∞–º–º–µ –±—ã–ª–∞ –∫–æ—Ä—Ä–µ–∫—Ü–∏—è –≥–µ—Ä–±–µ—Ä–∞ –ø–æ 4 —Ç–æ—á–∫–∞–º..... –Ø —Ç–∞–∫ –∂–µ —Å—á–∏—Ç–∞—é —á—Ç–æ –∫–æ–Ω—Å—Ç—Ä—É–∫—Ü–∏—è –∏ —Ç–∞–∫ —Å–∞–º–æ–¥–æ—Å—Ç–∞—Ç–æ—á–Ω–∞—è. –ê –∏–∑ —Ö–æ—Ç–µ–ª–æ–∫ –Ω–∞–¥–µ–∂–Ω–∞—è —Ä–∞–±–æ—Ç–∞ –±–µ–∑ –ø–µ—Ä–µ—Ö–æ–¥–Ω–∏–∫–∞ usb-uart –∏ –∫–æ—Ä—Ä–µ–∫—Ü–∏—è –ø–æ 4-–º —Ç–æ—á–∫–∞–º —Ä–µ–ø–µ—Ä–∞–º. –ë—ã–ª–æ –±—ã –≤–æ–æ–±—â–µ —Å—É–ø–µ—Ä.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
Altium
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. HL –î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –º–∞—Ä 18, 2017 15:00:57 |
|
| –ü—Ä–æ—Ä–µ–∑–∞–ª–∏—Å—å –∑—É–±—ã |
–ö–∞—Ä–º–∞: 1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: -26
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –∏—é–ª 18, 2014 11:44:32
–°–æ–æ–±—â–µ–Ω–∏–π: 224
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
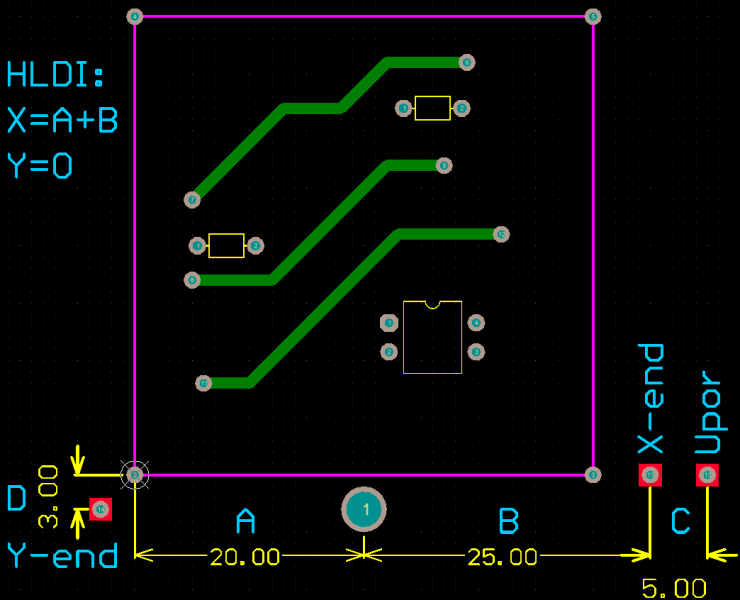
psychos, –æ–∫ —Å–ø–∞—Å–∏–±–æ, —Å–µ–π—á–∞—Å –≥—Ä–∞—Ñ–∏–∫–∏ –≤—å–π–≥–ª—è–¥—è—Ç—å –±–æ–ª–µ–µ –ø–æ —á–µ–ª–æ–≤–µ—á–µ—Å–∫–∏. –ü–æ–∂–∞–ª—É–π—Å—Ç–∞ –ø–æ–º–µ–Ω—è–π —Ü–≤–µ—Ç –≥—Ä–∞—Ñ–∏–∫–∏: —Ç–æ–∫ –ª–∞–∑–µ—Ä–∞ –Ω–∞ –∫—Ä–∞—Å–Ω–æ–π, –∞ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–∏ —Ñ–æ—Ç–æ–¥–∏–æ–¥–∞ –Ω–∞ —Å–∏–Ω—å–µ–π, –ø—É—Å—Ç—å –µ—Ç–æ –±—É–¥–µ—Ç —Å—Ç–∞–Ω–¥–∞—Ä—Ç —É –Ω–∞—Å. –•–æ—Ä–æ—à–∞—è –Ω–æ–≤–æ—Å—Ç—å: –æ–∫–∞–∑–∞–ª–æ—Å—å –æ–±—Ä–∞—Ç–Ω—å–π —Ç–æ–∫ —Ñ–æ–¥–æ–¥–∏–æ–¥–∞ —Å—Ç–æ–ª—å–∫–æ –±–æ–ª—å—à–æ–π, —á—Ç–æ–± –∏ —Å 23–ö —Ç–æ–≤–∞—Ä –≥—Ä–∞—Ñ–∏–∫–∞ –≤—Ö–æ–¥–∏—Ç –≤ –Ω–∞—Å—å–π—â–µ–Ω–∏–µ –ø–æ—Å–ª–µ 30–º–ê —Ç–æ–∫ –≤ –ª–∞–∑–µ—Ä–∞. –ù–æ –¥–ª—è –Ω–∞—Å –µ—Ç–æ –æ—á–µ–Ω—å —Ö–æ—Ä–æ—à–æ, —Ç–æ–≥–¥–∞ –Ω–∞–¥–æ —Å–Ω–∏–∑–∏—Ç—å —Å–æ–ø—Ä–æ—Ç–∏–≤–ª–µ–Ω–∏–µ —Ç–æ–≤–∞—Ä–∞ –Ω–∞ 5–ö –∏–ª–∏ –¥–∞–∂–µ –Ω–∞ 1–ö. –û—Ç—Å—é–¥–∞ –∏ –º–æ–∂–Ω–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –û–£ —Å –≤—Ö–æ–¥ –Ω–∞ –±–∏–ø–æ–ª—è—Ä–Ω—å–π–º–∏ —Ç—Ä–∞–Ω–∑–∏—Å—Ç–æ—Ä–∞–º–∏. –Ø —Ç–æ–∂–µ —Å–æ–±–∏—Ä–∞—é—Å—å –º–µ—Ä—è—Ç—å, –≤–æ–ø—Ä–æ—Å –Ω–∞ –Ω–µ—Å–∫–æ–ª—å–∫–æ –¥–Ω–µ–π. Serj_K, –Ω–∞–∫–æ–Ω–µ—Ü —Å–∏—Ç—É–∞—Ü–∏—è —Å —Ç–≤–æ–µ–π –≤–µ—Ä—Å–∏–π –Ω–∞—á–Ω–∞–ª–∞—Å—å –ø—Ä–æ—è—Å–Ω—è—Ç—å—Å—è –≤ –¥–µ—Ç–∞–ª–µ–π. –ü–æ–∂–∞–ª—É–π—Å—Ç–∞ –ø—Ä–æ—á–∏—Ç–∞–π –∏ –æ—Ç–≤–µ—Ç—å, –ø–æ—Å–º–æ—Ç—Ä–∏ —Ä–∏—Å—É–Ω–æ–∫ –∏ –ø–æ–ø—Ä–∞–≤—å –º–Ω–µ –µ—Å–ª–∏ –¥–æ–ø—É—Å–∫–∞—é –æ—à–∏–±–∫–∏. 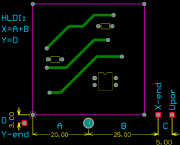 1. –í –ø—Ä–æ—à–∏–≤–∫–∞ STM –≤–Ω–æ—Å–∏–º –∑–Ω–∞—á–µ–Ω–∏–µ —Ä–∞–∑–º–µ—Ä–∞ –í (–æ—Ç —â–∏—Ñ—Ç–∞ –¥–æ –∫–æ–Ω—Ü–µ–≤–∏–∫–∞ X-end), –∫–æ–º–ø–∏–ª–∏—Ä—É–µ–º –∏ –∑–∞–ª–∏–≤–∞–µ–º –ø—Ä–æ—à–∏–≤–∫–∏. –Ý–∞—Å—Ç–æ—è–Ω–∏–µ –° (–æ—Ç –∫–æ–Ω—Ü–µ–≤–∏–∫–∞ –¥–æ —É–ø–æ—Ä–∞) —Å–µ–π—á–∞—Å –Ω–∞–º –Ω–µ –∏–Ω—Ç–µ—Ä–µ—Å—É–µ—Ç. 2. –ü–∞—Ä–∫—É–µ–º —Å—Ç–æ–ª–∞ –≤ Y=0, –∑–¥–µ—Å—å –≤–æ–æ–±—â–µ —Ä–∞–∑–º–µ—Ä D –∫–∞–∂–µ—Ç—å—Å—è –Ω–µ –∏–º–µ–µ—Ç—å –∑–Ω–∞—á–µ–Ω–∏–µ, —è –ø—Ä–æ—Å—Ç–æ –Ω–∞—Ä–∏—Å–æ–≤–∞–ª –æ–ø—Ç—Ä–æ–Ω Y-end –Ω–∞ —É—Ä–æ–≤–µ–Ω—å —à–∏—Ñ—Ç–∞ –¥–ª—è –Ω–∞–≥–ª—è–¥–Ω–æ—Å—Ç–∏. –í–∞–∂–Ω–æ —á—Ç–æ–± –ø—Ä–∏ —Å—Ä–∞–±–∞—Ç—å–π–≤–∞–Ω–∏–µ –æ–ø—Ç—Ä–æ–Ω–∞ Y-end, –ª–∞–∑–µ—Ä –≤—Ö–æ–¥–∏–ª –≤–Ω—É—Ç—Ä–∏ –≤ –∫–æ–Ω—Ç—É—Ä –ø–ª–∞—Ç—å–π –≤–Ω–µ –æ–±–ª–∞—Å—Ç—å —à–∏—Ñ—Ç–∞. –ù–æ –∫–∞–∫ —Ç–æ—á–Ω–æ –ø–∞—Ä–∫—É–µ–º - —É—Å—Ç–∞–Ω–æ–≤–∫–∞ —Å–∞–º–∞ –ª–∏ —É—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞–µ—Ç —à–∞–≥–æ–≤–∏–∫ –∏–ª–∏...? 3. –ü–∞—Ä–∫—É–µ–º –∫–∞—Ä–µ—Ç–∫—É –≥–¥–µ-—Ç–æ –ø–æ —Å–µ—Ä–µ–¥–∏–Ω–µ (—Å–ª–µ–≤–æ –æ—Ç –∫–æ–Ω—Ü–µ–≤–∏–∫–∞ X-end) –∏ –∂–º–µ–º –±—É—Ç–æ–Ω–∞ –¥–ª—è –≤–≤–æ–¥–∞ –∏ —Å —Ö–∞—Ä–¥—É–µ—Ä–Ω–æ–π –∫–ª–∞–≤–∏–∞—Ç—É—Ä–µ –≤–≤–æ–¥–∏–º —Å—Ç–æ–π–Ω–æ—Å—Ç—å 2–ê (–ø–æ–ª—å–Ω–∞—è —à–∏—Ä–∏–Ω–∞ –ø–ª–∞—Ç—å–π). –ó–¥–µ—Å—å –æ—á–µ–Ω—å –≤–∞–∂–Ω–æ –¥–µ—Ñ–∏–Ω–∏—Ä—É–µ–º —á—Ç–æ –µ—Ç–æ –ø–æ–ª—å–Ω–∞—è —à–∏—Ä–∏–Ω–∞ –ø–ª–∞—Ç—å–π - –µ—Ç–æ –Ω–∞–≤–µ—Ä–Ω–æ –æ—Ç —Ü–µ–Ω—Ç—Ä –ª–µ–≤–æ–≥–æ —Ä–µ–ø–µ—Ä–Ω–æ–≥–æ –æ—Ç–≤–µ—Ä—Å—Ç–∏—è –≤ –≥–µ—Ä–±–µ—Ä–∞ –¥–æ —Ü–µ–Ω—Ç—Ä –ø—Ä–∞–≤–æ–≥–æ —Ä–µ–ø–µ—Ä–Ω–æ–≥–æ –∏–ª–∏ —á—Ç–æ —Ç–∞–∫–æ–µ? –ü—Ä–∏ –µ—Ç–æ–º, —à–∏—Ä–∏–Ω–∞ 2–ê –∏–∑ –æ–ø–µ—Ä–∞—Ç–∏–≤–Ω—å–π –ø–∞–º—è—Ç–∏ STM-a –≤–Ω–æ—Å–∏—Ç—å—Å—è —Å—Ä–∞–∑—É –≤ –ü–û –∏ —Ç–∞–º –¥–æ–ª–∂–Ω–∞ –æ—Ç–æ–±—Ä–∞–∂–∞—Ç—å—Å—è —à–∏—Ä–∏–Ω–∞ –ø–ª–∞—Ç—å–π 2–ê –∫–æ—Ç–æ—Ä—å–π –º—å–π –≤–Ω–æ—Å–∏–ª–∏. –ê –∫–∞–∫ STM –æ–ø—Ä–µ–¥–µ–ª—è–µ—Ç –∫–æ–Ω–µ—Ü –≤–≤–æ–¥–∞ –∏–Ω—Ñ–æ—Ä–º–∞—Ü–∏–∏, —Å–∫–æ–ª—å–∫–æ digits –æ–Ω –∂–¥–µ—Ç –µ—Å–ª–∏ —à–∏—Ä–∏–Ω–∞ –ø–ª–∞—Ç –Ω–∞–ø—Ä–∏–º–µ—Ä 154.23–º–º? –ò –µ—Å–ª–∏ –≤–Ω–æ—Å–∏–ª–∏ —Å –æ—à–∏–±–∫–æ–π, –º–æ–∂–Ω–æ –ª–∏ –∏—Å–ø—Ä–∞–≤–∏–º —Å –ø–æ–≤—Ç–æ—Ä–Ω–æ–≥–æ –Ω–∞–∂–∏–º–∞–Ω–∏—è –±—É—Ç–æ–Ω–∞ –¥–ª—è –≤–≤–æ–¥–∞? 4. –ó–∞–≥–æ–Ω—è–µ–º –∫–∞—Ä–µ—Ç–∫—É –º–µ–¥–ª–µ–Ω–Ω–æ –≤–ø—Ä–∞–≤–æ –∏ –≤ –º–æ–º–µ–Ω—Ç —Å—Ä–∞–±–∞—Ç—å–π–≤–∞–Ω–∏—è X-end –æ–ø—Ç—Ä–æ–Ω–∞, STM –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏ –≤–Ω–æ—Å–∏—Ç—å –≤ –ü–û —Ä–∞–∑—Å—Ç–æ—è–Ω–∏–µ –•=(–ê+–í) + —Ç–µ–∫—É—â–æ–µ —Å–º–µ—â–µ–Ω–∏–µ –µ–Ω–∫–æ–¥–µ—Ä–∞. –ó–¥–µ—Å—å –≤–æ–ø—Ä–æ—Å –µ—Å—Ç—å: –≤–æ–∑–º–æ–∂–µ–Ω –ª–∏ —Å—Ä–∏–≤ –≤ –≤—å–π—á–∏—Å–ª–µ–Ω–∏–∏ –∫–æ–æ—Ä–¥–∏–Ω–∞—Ç –≤ –º–æ–º–µ–Ω—Ç —Å—Ä–∞–±–∞—Ç—å–π–≤–∞–Ω–∏—è –æ–ø—Ç—Ä–æ–Ω–∞? –ï—Å–ª–∏ –ø—Ä–æ—Ü–µ—Å–æ—Ä –∑–∞–Ω—è—Ç—å —Å –≤—å–π—á–∏—Å–ª–µ–Ω–∏–µ —Å–±–æ—Ä–∞ –ê+–í+—Ç–µ–∫—É—â–æ–µ —Å–º–µ—â–µ–Ω–∏–µ+–≤–Ω–µ—Å–µ–Ω–∏—è –∫–æ–æ—Ä–¥–∏–Ω–∞—Ç, —Ç–æ –µ—Ç–æ –µ–º—É –º–µ—à–∞–µ—Ç –ª–∏ –±—Ä–æ–∏—Ç—å –∏–º–ø—É–ª—å—Å–æ–≤ —Å –µ–Ω–∫–æ–¥–µ—Ä–∞ –±–µ–∑ –ø—Ä–æ–ø—É—Å–∫? –ï—Å–ª–∏ —É–≤–µ—Ä–µ–Ω –Ω–∞ 100% —á—Ç–æ–± –Ω–µ –±—É–¥–µ—Ç –æ—à–∏–±–∫–∞ –ø–µ—Ä–µ–¥–∞—á –¥–∞–∂–µ –∏ –Ω–∞ –æ–¥–Ω–æ–º—É –∏–º–ø—É–ª—Å—É, —Ç–æ–≥–¥–∞ –≤–æ–æ–±—â–µ –±–µ–∑ –≤–æ–ø—Ä–æ—Å. –ù–æ –µ—Å–ª–∏ –µ—Å—Ç—å —Å–æ–º–Ω–µ–≤–∞–Ω–∏—è –¥–ª—è –ø—Ä–æ–ø—É—Å–∫–∏, —Ç–æ–≥–¥–∞ –Ω–µ –ª—É—á—à–µ –ª–∏ –ø—Ä–æ—Å—Ç–æ —Å–¥–≤–∏–≥–∞—Ç—å –∫–∞—Ä–µ—Ç–∫–∞ –≤—Ä—É—á–Ω—É—é –¥–æ —É–ø–æ—Ä–∞ –∏ –≤–Ω–æ—Å–∏—Ç—å —Å –∫–ª–∞–≤–∏–∞—Ç—É—Ä—É –∑–Ω–∞—á–µ–Ω–∏–µ –ê+–í+–° –∫–∞–∫ –¥–µ–ª–∞–ª –ø–æ –ø—Ä–µ–∂–Ω–µ–º—É? 5. –ü–æ—Å–ª–µ –≤—Å–µ –µ—Ç–æ–≥–æ –º—å–π –Ω–∞—Ö–æ–¥–∏–º—Å—è —É–∂–µ –Ω–∞ —Ç–æ—á–Ω—å–π –∞–±—Å–æ–ª—é—Ç–Ω–æ–π –∫–æ–æ—Ä–¥–∏–Ω–∞—Ç–æ–π, —Ç–µ–ø–µ—Ä—å —á—Ç–æ –¥–µ–ª–∞–µ–º: –∑–∞–≥–æ–Ω—è–µ–º –∫–∞—Ä–µ—Ç–∫–∏ –≤–ª–µ–≤–æ –≤ –Ω—É–ª—è –ª–∏ (–¥–ª—è —Å—Ç–∞—Ä—Ç–∞ –µ–∫—Å–ø–æ–Ω–∞—Ü–∏–∏)? –ê –∫–∞–∫–∞—è —Ç–æ—á–Ω–æ—Å—Ç—å –∞–≤—Ç–æ –ø–æ–∑–∏—Ü–∏–æ–Ω–∏—Ä–æ–≤–∞–Ω–∏—è –≤ –Ω—É–ª—è –±—É–¥–µ—Ç, —Ç–æ–µ—Å—Ç –Ω–∞–¥–æ –ª–∏ –≤—Ä—É—á–Ω—É—é —Ç–æ–ª–∫–∞—Ç—å –∫–∞—Ä–µ—Ç–∫–∏ –∏ —Å–ª–µ–¥–∏—Ç—å –≤ –æ–∫–Ω–æ HLDI —á—Ç–æ–± –¥–æ—Å—Ç–∏–≥ –∫–æ–æ—Ä–¥–∏–Ω–∞—Ç–∞ –•=–Ω—É–ª—å? –ò –µ—â–µ –æ–¥–∏–Ω –≤–æ–ø—Ä–æ—Å-–ø—Ä–µ–¥–ª–æ–∂–µ–Ω–∏–µ. –û–ø—Ç—Ä–æ–Ω –∫–æ–Ω—Ü–µ–≤–∏–∫ Y-end —Å—Ä–∞–±–∞—Ç—å–π–≤–∞–µ—Ç –Ω–∞ –ª–∏–Ω–µ–π–Ω–æ–µ –ø–µ—Ä–µ–º–µ—â–µ–Ω–∏–µ —Å—Ç–æ–ª–∞. –ù–æ –µ—Å–ª–∏ –ø–æ—Å—Ç–∞–≤–∏–º –≤—Ç–æ—Ä–æ–π –æ–ø—Ç—Ä–æ–Ω –Ω–∞ –≤–∞–ª—É —à–∞–≥–æ–≤–æ–≥–æ –¥–≤–∏–≥–∞—Ç–µ–ª—è –∏ –µ—Ç–∏—Ö 2 –æ–ø—Ç—Ä–æ–Ω–æ–≤ —Ä–∞–±–æ—Ç–∞—é—Ç –≤–º–µ—Å—Ç–µ –Ω–∞ –ø—Ä–∏–Ω—Ü–∏–ø–µ –ª–æ–≥–∏—á–µ—Å–∫–æ–π –ò (AND), —Ç–æ–¥–∞ —Ç–æ—á–Ω–æ—Å—Ç—å –ø–æ–∑–∏—Ü–∏–æ–Ω–∏—Ä–æ–≤–∞–Ω–∏—è –±—É–¥–µ—Ç –Ω–∞ –ø–æ—Ä—è–¥–æ–∫ –≤—å–π—à–µ, –ø–æ—Ç–æ–º—É —á—Ç–æ–± –ø–µ—Ä–µ–¥–∞—á–Ω–æ–µ –æ—Ç–Ω–æ—à–µ–Ω–∏–µ –≤–∞–ª–∞ –æ—á–µ–Ω—å –≤–µ–ª–∏–∫–æ, –ø—Ä–∏–º–µ—Ä–Ω–æ 0.5 –≥—Ä–∞–¥—É—Å–∞ –æ—Ç–≤–µ—á–∞—é—Ç –Ω–∞ 0.01–º–º –ª–∏–Ω–µ–π–Ω–æ–µ –ø–µ—Ä–µ–º–µ—â–µ–Ω–∏–µ —Å—Ç–æ–ª–∞. –ü–æ—á–µ–º—É –≤–æ–æ–±—â–µ –ø–∏—à—É –µ—Ç–æ–≥–æ: —è –±—É–¥—É –∫–æ–º–±–∏–Ω–∏—Ä–æ–≤–∞—Ç—å HLDI —Å —Å–≤–µ—Ä–∏–ª—å–Ω–∏–∫ –∏ —Ç–æ—á–Ω–æ—Å—Ç—å –ø–æ–∑–∏—Ü–∏–æ–Ω–∏—Ä–æ–≤–∞–Ω–∏–µ —Å—Ç–æ–ª–∞ –Ω—É–∂–Ω–∞ –±–æ–ª–µ–µ –≤—å–π—Å–æ–∫–∞—è. –ú–æ–∂–Ω–æ –ø–æ–¥–∫–ª—é—á–∏—Ç—å –æ–±–∞ Y –æ–ø—Ç—Ä–æ–Ω–æ–≤ —á–µ—Ä–µ–∑ AND –ª–æ–≥–∏–∫–∞, –Ω–æ –º–æ–∂–Ω–æ –∏ —Å–æ—Ñ—Ç—É–µ—Ä–Ω–æ, —Ç—å–π —á—Ç–æ –¥—É–º–∞–µ—à –ø—Ä–æ –µ—Ç–æ–º—É –≤–æ–ø—Ä–æ—Å—É?
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
Serj_K
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. HL –î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –º–∞—Ä 18, 2017 17:51:10 |
|
–ö–∞—Ä–º–∞: 16
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 177
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –∞–ø—Ä 14, 2012 16:11:35
–°–æ–æ–±—â–µ–Ω–∏–π: 718
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
Altium –ø–∏—Å–∞–ª(–∞): –ü–æ–∂–∞–ª—É–π—Å—Ç–∞ –ø—Ä–æ—á–∏—Ç–∞–π –∏ –æ—Ç–≤–µ—Ç—å, –ø–æ—Å–º–æ—Ç—Ä–∏ —Ä–∏—Å—É–Ω–æ–∫ –∏ –ø–æ–ø—Ä–∞–≤—å –º–Ω–µ –µ—Å–ª–∏ –¥–æ–ø—É—Å–∫–∞—é –æ—à–∏–±–∫–∏. 1) –î–∞ 2) –ü—Ä–∏ Y=0 –Ω–∏–∂–Ω—è—è –∫–æ–æ—Ä–¥–∏–Ω–∞—Ç–∞ –ø–ª–∞—Ç—ã –Ω–∞—Ö–æ–¥–∏—Ç—Å—è –≤—ã—à–µ —à—Ç–∏—Ñ—Ç–∞, —Ä–∞—Å—Å—Ç–æ—è–Ω–∏–µ –Ω–µ –∫—Ä–∏—Ç–∏—á–Ω–æ. –£ –º–µ–Ω—è –æ–∫–æ–ª–æ 2–º–º. –Ý–µ–ø–µ—Ä–Ω—ã–µ –æ—Ç–≤–µ—Ä—Å—Ç–∏—è –º–æ–≥—É—Ç –±—ã—Ç—å –∏ –∑–∞ –ø—Ä–µ–¥–µ–ª–∞–º–∏ –≤–Ω–µ—à–Ω–µ–≥–æ –∫–æ–Ω—Ç—É—Ä–∞ –ø–ª–∞—Ç—ã, –∞ —Ä–∞–∑–º–µ—Ä –ø–ª–∞—Ç—ã –≤ –ø—Ä–æ–≥—Ä–∞–º–º–µ –æ–ø—Ä–µ–¥–µ–ª—è–µ—Ç—Å—è –ø–æ –Ω–∏–º. –£ –º–µ–Ω—è –ø–∞—Ä–∫–æ–≤–∫–∞ –ø–æ –Ω–∞–∂–∞—Ç–∏—é –∫–Ω–æ–ø–∫–∏ –Ω–∞ —É—Å—Ç–∞–Ω–æ–≤–∫–µ. 3) –ù–∞—á–∞–ª—å–Ω–æ–µ –ø–æ–ª–æ–∂–µ–Ω–∏–µ –∫–∞—Ä–µ—Ç–∫–∏ –ø—Ä–æ—Å—Ç–æ –ª–µ–≤–µ–µ –∫–æ–Ω—Ü–µ–≤–∏–∫–∞. –° –∫–ª–∞–≤–∏–∞—Ç—É—Ä—ã –≤–≤–æ–¥–∏—Ç—Å—è –∑–Ω–∞—á–µ–Ω–∏–µ —à–∏—Ä–∏–Ω—ã –ø–ª–∞—Ç—ã, –∫–æ—Ç–æ—Ä–æ–µ –æ–ø—Ä–µ–¥–µ–ª–∏–ª–∞ –ø—Ä–æ–≥—Ä–∞–º–º–∞ –ø–æ—Å–ª–µ –∑–∞–≥—Ä—É–∑–∫–∏ –≥–µ—Ä–±–µ—Ä–∞. –í–≤–æ–¥–∏–º–æ–µ –∑–Ω–∞—á–µ–Ω–∏–µ –æ—Ç–æ–±—Ä–∞–∂–∞–µ—Ç—Å—è –≤ –ø–æ–ª–µ —Ç–µ–∫—É—â–µ–π –∫–æ–æ—Ä–¥–∏–Ω–∞—Ç—ã –•, —Ç–∞–∫ –∫–∞–∫ —Ç–µ–∫—É—â–∞—è –∫–æ–æ—Ä–¥–∏–Ω–∞—Ç–∞ –ø–µ—Ä–µ–¥–∞—ë—Ç—Å—è –≤ –ø—Ä–æ–≥—Ä–∞–º–º—É –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏. –ü—Ä–∏ –æ—à–∏–±–∫–µ –≤–≤–æ–¥–∞ –∑–Ω–∞—á–µ–Ω–∏–µ –º–æ–∂–Ω–æ —Å–±—Ä–æ—Å–∏—Ç—å. –£ –º–µ–Ω—è —ç—Ç–æ —Ç–∞ –∂–µ –∫–Ω–æ–ø–∫–∞, —á—Ç–æ –∏ –ø–∞—Ä–∫–æ–≤–∫–∞ –ø–æ Y, –Ω–æ –ø—Ä–∏ –¥–ª–∏—Ç–µ–ª—å–Ω–æ–º —É–¥–µ—Ä–∂–∞–Ω–∏–∏. 4) –î–≤–∏–≥–∞–µ–º –∫–∞—Ä–µ—Ç–∫—É –∫–Ω–æ–ø–∫–∞–º–∏ –∏–∑ –ø—Ä–æ–≥—Ä–∞–º–º—ã –≤–ø—Ä–∞–≤–æ. –ü—Ä–∏ –¥–æ—Å—Ç–∏–∂–µ–Ω–∏–∏ –∫–æ–Ω—Ü–µ–≤–∏–∫–∞ —É—Å—Ç–∞–Ω–æ–≤–∫–∞ —É—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞–µ—Ç —Ç–µ–∫—É—â—É—é –∫–æ–æ—Ä–¥–∏–Ω–∞—Ç—É, —Ä–∞–≤–Ω—É—é –ê+–í –∏ –ø–µ—Ä–µ–¥–∞—ë—Ç –µ—ë –≤ –ø—Ä–æ–≥—Ä–∞–º–º—É. –≠—Ç–æ –∏ –µ—Å—Ç—å —Å–º–µ—â–µ–Ω–∏–µ –æ—Ç–Ω–æ—Å–∏—Ç–µ–ª—å–Ω–æ –Ω–∏–∂–Ω–µ–≥–æ –ª–µ–≤–æ–≥–æ —É–≥–ª–∞ –ø–ª–∞—Ç—ã. –ü—Ä–∏ —ç—Ç–æ–π —Å–∫–æ—Ä–æ—Å—Ç–∏ –ø–µ—Ä–µ–º–µ—â–µ–Ω–∏—è –Ω–∏—á–µ–≥–æ –Ω–µ —Å–±–æ–∏—Ç. 100%. 5) –ú–æ–∂–Ω–æ –ø—Ä–æ—Å—Ç–æ –Ω–∞—á–∞—Ç—å –≤—ã–≤–æ–¥, –∫–∞—Ä–µ—Ç–∫—É —Å–ø–µ—Ü–∏–∞–ª—å–Ω–æ –¥–≤–∏–≥–∞—Ç—å –Ω–µ –Ω—É–∂–Ω–æ. –ò–Ω–æ–≥–¥–∞ –ø—Ä–æ–∏—Å—Ö–æ–¥—è—Ç —Å–±–æ–∏ –ø—Ä–∏–º–µ—Ä–Ω–æ –Ω–∞ –Ω–µ—Å–∫–æ–ª—å–∫–æ –¥–µ—Å—è—Ç—ã—Ö –º–º, –Ω–æ –æ–Ω–∏ –ø—Ä–æ–∏—Å—Ö–æ–¥—è—Ç –∏ –ø—Ä–∏ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏–∏ –∫–∞–º–µ—Ä—ã. –ü—Ä–∏—á–∏–Ω–∞ —ç—Ç–æ–≥–æ –Ω–µ –≤—ã—è—Å–Ω–µ–Ω–∞. –ï—Å–ª–∏ —Å–±–æ—è –Ω–µ—Ç, —Ç–æ —Ç–æ—á–Ω–æ—Å—Ç—å –±—É–¥–µ—Ç –æ–ø—Ä–µ–¥–µ–ª—è—Ç—å—Å—è —Ä–∞–∑—Ä–µ—à–∞—é—â–µ–π —Å–ø–æ—Å–æ–±–Ω–æ—Å—Ç—å—é —ç–Ω–∫–æ–¥–µ—Ä–∞. Altium –ø–∏—Å–∞–ª(–∞): –ù–æ –µ—Å–ª–∏ –ø–æ—Å—Ç–∞–≤–∏–º –≤—Ç–æ—Ä–æ–π –æ–ø—Ç—Ä–æ–Ω –Ω–∞ –≤–∞–ª—É —à–∞–≥–æ–≤–æ–≥–æ –¥–≤–∏–≥–∞—Ç–µ–ª—è –∏ –µ—Ç–∏—Ö 2 –æ–ø—Ç—Ä–æ–Ω–æ–≤ —Ä–∞–±–æ—Ç–∞—é—Ç –≤–º–µ—Å—Ç–µ –Ω–∞ –ø—Ä–∏–Ω—Ü–∏–ø–µ –ª–æ–≥–∏—á–µ—Å–∫–æ–π –ò (AND), —Ç–æ–¥–∞ —Ç–æ—á–Ω–æ—Å—Ç—å –ø–æ–∑–∏—Ü–∏–æ–Ω–∏—Ä–æ–≤–∞–Ω–∏—è –±—É–¥–µ—Ç –Ω–∞ –ø–æ—Ä—è–¥–æ–∫ –≤—å–π—à–µ –û—Ç –≤–∫–ª—é—á–µ–Ω–∏—è 2 –æ–ø—Ç—Ä–æ–Ω–æ–≤ –ø–æ –ª–æ–≥–∏—á–µ—Å–∫–æ–π –ò —Ç–æ—á–Ω–æ—Å—Ç—å –ø–æ–∑–∏—Ü–∏–æ–Ω–∏—Ä–æ–≤–∞–Ω–∏—è –Ω–µ —É–≤–µ–ª–∏—á–∏—Ç—Å—è, —Ç–∞–∫ –∫–∞–∫ –≤ —ç—Ç–æ–º —Å–ª—É—á–∞–µ —Å–∏–≥–Ω–∞–ª –≤—Å—ë —Ä–∞–≤–Ω–æ –ø–æ—è–≤–∏—Ç—Å—è —Ç–æ–ª—å–∫–æ –ø–æ—Å–ª–µ —Å—Ä–∞–±–∞—Ç—ã–≤–∞–Ω–∏—è –≤—Ç–æ—Ä–æ–≥–æ –æ–ø—Ç—Ä–æ–Ω–∞.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
psychos
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. HL –î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –º–∞—Ä 18, 2017 19:10:15 |
|
| –í—ã–º–æ–≥–∞—Ç–µ–ª—å –ø—Ä–∏–ø–æ—è |
|
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 171
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç —Å–µ–Ω 23, 2008 19:36:10
–°–æ–æ–±—â–µ–Ω–∏–π: 538
–û—Ç–∫—É–¥–∞: –ú–∞–≥–Ω–∏—Ç–æ–≥–æ—Ä—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–¢—É—Ç 1, —Ç—É—Ç2 –∏ —Ç—É—Ç3 –ø—Ä–µ–¥—ã–¥—É—â–∏–µ –∏–∑–º–µ—Ä—è–ª–∫–∏: –°–ø–æ–π–ª–µ—Ä
–°—Ä–∞–Ω—å –∫–æ—à–∞—á—å—è  –ü—Ä—è–º–∞—è  –ù–∞–ø—Ä—è–∂–µ–Ω–∏–µ –≤ —Ü–µ–ø–∏ —Ñ–æ—Ç–æ–¥–∏–æ–¥–∞ (-4,03–≤). –°–æ–ø—Ä–æ—Ç–∏–≤–ª–µ–Ω–∏–µ –≤ —Ü–µ–ø–∏ PD 3.2881k —à–∞–≥ —É—Å—Ç–∞–Ω–æ–≤–∫–∏ —Ç–æ–∫–∞ LD 5m–ê –≤ –¥–∏–∞–ø–∞–∑–æ–Ω–µ 0-55–º–ê  –≤ –∫–∏—Ç–∞–π–®–∏—Ç–µ –Ω–∞–ø–∏—Å–∞–Ω–æ —á—Ç–æ –ü–æ—Ä–æ–≥–æ–≤—ã–π —Ç–æ–∫ —Ç–æ–∫ —Å—Ç–∞—Ä–æ–π –∫–æ—Ä–∑–∏–Ω—ã(Thresh Old current) 26–º–ê, –∑–Ω–∞—á–∏—Ç –ø–æ–ª—É—á–∞–µ—Ç—Å—è —á—É—Ç—å –µ—â—ë —É–≤–µ–ª–∏—á–∏–≤ —Ç–æ–∫ –Ω–∞ PD, –±—É–¥–µ–º –∏–º–µ—Ç—å –Ω–∞—á–∞–ª–æ –ø—Ä–æ—Ç–µ–∫–∞–Ω–∏—è —Ç–æ–∫–∞ —á–µ—Ä–µ–∑ —Ñ–æ—Ç–æ–¥–∏–æ–¥ –∫–∞–∫ —Ä–∞–∑ –Ω–∞ 26–º–ê. –ò —á—Ç–æ —Ç–æ –º–æ–∏ —É—Å—ã –º–Ω–µ –ø–æ–¥—Å–∫–∞–∑—ã–≤–∞—é—Ç, —ç—Ç–æ –ø—Ä–æ–∏–∑–æ–π–¥—ë—Ç –ø—Ä–∏ —Å–æ–ø—Ä–æ—Ç–∏–≤–ª–µ–Ω–∏–∏ –≤ 2–∫–û–º 
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Altium
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. HL –î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –º–∞—Ä 18, 2017 21:13:55 |
|
| –ü—Ä–æ—Ä–µ–∑–∞–ª–∏—Å—å –∑—É–±—ã |
–ö–∞—Ä–º–∞: 1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: -26
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –∏—é–ª 18, 2014 11:44:32
–°–æ–æ–±—â–µ–Ω–∏–π: 224
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
Psychos, –º–æ–∂–Ω–æ –ª–∏ –ø–æ—Å–º–æ—Ç—Ä–µ—Ç—å –¥–µ–π—Ç–∞—à–∏–π—Ç? –í –ø—Ä–∏–Ω—Ü–∏–ø–µ threshold - –µ—Ç–æ –ª–∏–º–∏—Ç —Ç–æ–∫–∞, –Ω–∏–∂–µ –∫–æ—Ç–æ—Ä–æ–≥–æ –ª–∞–∑–µ—Ä —Å–≤–µ—Ç–∏—Ç —Å–ø–æ–Ω—Ç–∞–Ω–Ω–æ (spontaneous emission). –í—å–π—à–µ –µ—Ç–æ–≥–æ –ª–∏–º–∏—Ç–∞ –ª–∞–∑–µ—Ä —Å–≤–µ—Ç–∏—Ç —É—Å—Ç–æ–π—á–∏–≤–æ (stimulated emission). –ú—å–π –º–µ–¥–ª–µ–Ω–Ω–æ –ø—Ä–∏–±–ª–∏–∂–∞–µ–º—Å—è –∫ –ø—Ä–∞–≤–¥—É... —Å–ø–∞—Å–∏–±–æ –∑–∞ –∏–∑–º–µ—Ä–µ–Ω–∏—è, –µ—Ç–æ –æ—á–µ–Ω—å –ø–æ–ª–µ–∑–Ω–∞—è –∏–Ω—Ñ–æ—Ä–º–∞—Ü–∏—è! –ò–Ω–∞—á–µ –≥—Ä–∞—Ñ–∏–∫–∞ —Å—Ç–∞–ª–∞ –∏—Å–ø—Ä–∞–≤–ª—è—Ç—å—Å—è –∫–∞–∫ –≤–∏–¥–Ω–æ. –î–∞, –Ω–∞–≤–µ—Ä–Ω–æ —Ç–æ–≤–∞—Ä –Ω–∞–¥–æ —Å–Ω–∏–∑–∏—Ç—å –¥–æ 10-5–ö –ø—Ä–∏–º–µ—Ä–Ω–æ, –Ω–æ –∏ —Ç–∞–∫ —É–∂–µ –≤—Å–µ —è—Å–Ω–æ.
Serj_K, –ø–æ–Ω—è—Ç–Ω–æ –≤—Å–µ. –ù–æ –≤—Å–µ —Ç–∞–∫–∏ –≤—Ç–æ—Ä–æ–π –æ–ø—Ç—Ä–æ–Ω –ø–æ Y –∏–Ω—Ç–µ—Ä–µ—Å–Ω–∞—è –∏–¥–µ—è. –ü—Ä–æ—Å—Ç–æ –ø—Ä–µ–¥–∞–≤–∞—Ç–µ–ª—å–Ω–æ–µ –æ—Ç–Ω–æ—à–µ–Ω–∏–µ –≤–∏–Ω—Ç–∞ –∑–¥–µ—Å—å —É–≤–µ–ª–∏—á–∏–≤–∞–µ—Ç —Ç–æ—á–Ω–æ—Å—Ç—å –Ω–∞ –ø–æ—Ä—è–¥–æ–∫.
–í—Ç–æ—Ä–æ–π Y –æ–ø—Ç—Ä–æ–Ω –±—É–¥–µ—Ç –ª–æ–≤–∏—Ç —É–≥–ª–æ–≤—å–π–µ –∏–∑–º–µ–Ω–µ–Ω–∏—è –ø—Ä–∏–º–µ—Ä–Ω–æ –æ—Ç 0.5 –≥—Ä–∞–¥—É—Å–∞, –∞ –µ—Ç–æ —É–∂–µ –æ—Ç–≤–µ—á–∞–µ—Ç –Ω–∞ –ª–∏–Ω–µ–π–Ω–æ–µ –ø–µ—Ä–µ–º–µ—â–µ–Ω–∏–µ –æ—Ç 0.01–º–º (–ø–∏—à—É –ø—Ä–æ—Å—Ç–æ –¥–ª—è –ø—Ä–∏–º–µ—Ä–∞). –¢–∞–∫ —Ä–∞–±–æ—Ç–∞—é—Ç –¥–∏–≥–∏—Ç–∞–ª–Ω—å–π–µ –º–∏–∫—Ä–æ–º–µ—Ç—Ä—å–π —Å rotary –µ–Ω–∫–æ–¥–µ—Ä.
–î–æ—Å—Ç–∏–≥–Ω—É–ª–∏ –ø–µ—Ä–≤–æ–≥–æ –æ–ø—Ç—Ä–æ–Ω–∞, –∂–¥–µ–º —Å–∏–≥–Ω–∞–ª –æ—Ç –≤—Ç–æ—Ä–æ–≥–æ, –ø—Ä–æ—Å—Ç–æ –ª–æ–≥–∏—á–µ—Å–∫–æ–µ –ò –ø–æ–¥–∫–ª—é—á–µ–Ω–∏–µ. –°–∏–≥–Ω–∞–ª –æ—Ç –≤—Ç–æ—Ä–æ–≥–æ –æ–ø—Ç—Ä–æ–Ω–∞ –±—É–¥–µ—Ç –ø–æ–∑–≤–æ–ª–∏—Ç—å –Ω–∞–º –±–æ–ª–µ–µ —Å—Ç—Ä–∏–∫—Ç–Ω–∞—è –ø–æ–≤—Ç–æ—Ä—è–µ–º–æ—Å—Ç.
–ê –≤ —Å—Ö–µ–º–∞ –∞–≤—Ç–æ—Ä–∞ –±—å–π–ª–∏ 2 —Å–≤–µ—Ç–æ–¥–∏–æ–¥–∞, —É —Ç–µ–±—è –∏—Ö –Ω–µ—Ç. –ö–∞–∫–∞—è —É –Ω–∏—Ö —Ñ—É–Ω–∫—Ü–∏—è?
–ü–æ—Å–ª–µ–¥–Ω–∏–π —Ä–∞–∑ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞–ª–æ—Å—å Altium –°–± –º–∞—Ä 18, 2017 22:15:36, –≤—Å–µ–≥–æ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞–ª–æ—Å—å 7 —Ä–∞–∑(–∞).
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
psychos
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. HL –î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –º–∞—Ä 18, 2017 21:57:37 |
|
| –í—ã–º–æ–≥–∞—Ç–µ–ª—å –ø—Ä–∏–ø–æ—è |
|
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 171
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç —Å–µ–Ω 23, 2008 19:36:10
–°–æ–æ–±—â–µ–Ω–∏–π: 538
–û—Ç–∫—É–¥–∞: –ú–∞–≥–Ω–∏—Ç–æ–≥–æ—Ä—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
—É –∫–∏—Ç–∞–π—Ü–∞ –Ω–∞ —Å—Ç—Ä–∞–Ω–∏—Ü–µ –±—ã–ª(–≤ –∫–∞—Ä—Ç–∏–Ω–∫–∞—Ö –∞ –Ω–µ PDF), –≤–∏–¥–∏–º–æ –∫–∏—Ç–∞–µ—Ü –Ω–µ —Å–æ–≤—Ä–∞–ª. –ø–æ–∏—â—É –ø–æ–ø–æ–∑–∂–µ, –µ—Å–ª–∏ –Ω–∞–π–¥—É —Ç—É—Ç –ø—Ä–∏–ª–æ–∂—É. –§–æ—Ç–æ –∫–∏—Ç–∞–π–®–∏—Ç–∞ –≤ –ø–µ—Ä–≤—ã—Ö –∏–∑–º–µ—Ä—è–ª–∫–∞—Ö –ø—Ä–∏–ª–æ–∂–µ–Ω –∫ –ø–æ—Å—Ç—É. download/file.php?id=279579
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
Serj_K
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. HL –î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –º–∞—Ä 18, 2017 22:14:43 |
|
–ö–∞—Ä–º–∞: 16
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 177
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –∞–ø—Ä 14, 2012 16:11:35
–°–æ–æ–±—â–µ–Ω–∏–π: 718
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
Altium –ø–∏—Å–∞–ª(–∞): –ü—Ä–æ—Å—Ç–æ –ø—Ä–µ–¥–∞–≤–∞—Ç–µ–ª—å–Ω–æ–µ –æ—Ç–Ω–æ—à–µ–Ω–∏–µ –≤–∏–Ω—Ç–∞ –∑–¥–µ—Å—å —É–≤–µ–ª–∏—á–∏–≤–∞–µ—Ç —Ç–æ—á–Ω–æ—Å—Ç—å –Ω–∞ –ø–æ—Ä—è–¥–æ–∫.
–æ–ø—Ç—Ä–æ–Ω –±—É–¥–µ—Ç –ª–æ–≤–∏—Ç —É–≥–ª–æ–≤—å–π–µ –∏–∑–º–µ–Ω–µ–Ω–∏—è –ø—Ä–∏–º–µ—Ä–Ω–æ –æ—Ç 0.5 –≥—Ä–∞–¥—É—Å–∞ –∞ –µ—Ç–æ —É–∂–µ 0.01–º–º (–ø–∏—à—É –ø—Ä–æ—Å—Ç–æ –¥–ª—è –ø—Ä–∏–º–µ—Ä–∞). –¢–æ—á–Ω–æ—Å—Ç—å —É—Å—Ç–∞–Ω–æ–≤–∫–∏ –∫–æ–æ—Ä–¥–∏–Ω–∞—Ç—ã –ø–æ –æ—Å–∏ Y —Ä–∞–≤–Ω–∞ –≤–µ–ª–∏—á–∏–Ω–µ —à–∞–≥–∞ –ø–æ –æ—Å–∏ Y. –ù–µ –±–æ–ª—å—à–µ. –ü—Ä–∏ 1200–¥–ø–∏ —ç—Ç–æ 0,021–º–º, –¥–∞–∂–µ –µ—Å–ª–∏ —Å–∞–º –æ–ø—Ç—Ä–æ–Ω –º–æ–∂–µ—Ç –∏ –ª—É—á—à–µ. –ò–∑-–∑–∞ –ø–æ–≥—Ä–µ—à–Ω–æ—Å—Ç–µ–π –≤ –∏–∑–≥–æ—Ç–æ–≤–ª–µ–Ω–∏–∏ –ø–æ–¥–≤–∏–∂–Ω–æ–π —á–∞—Å—Ç–∏ –º–µ—Ö–∞–Ω–∏–∫–∏ –∏ –ª—é—Ñ—Ç–æ–≤ –±–û–ª—å—à—É—é —Ç–æ—á–Ω–æ—Å—Ç—å –ø–æ–ª—É—á–∏—Ç—å –±—É–¥–µ—Ç —Å–ª–æ–∂–Ω–æ –∏ –≥–ª–∞–≤–Ω–æ–µ –Ω–µ –Ω—É–∂–Ω–æ. Altium –ø–∏—Å–∞–ª(–∞): –ê –≤ —Å—Ö–µ–º–∞ –∞–≤—Ç–æ—Ä–∞ –±—å–ª–∏ 2 —Å–≤–µ—Ç–æ–¥–∏–æ–¥–∞, —É —Ç–µ–±—è –∏—Ö –Ω–µ—Ç. –ö–∞–∫–∞—è —É –Ω–∏—Ö —Ñ—É–Ω–∫—Ü–∏—è? –ê–≤—Ç–æ—Ä –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–ª –∏—Ö –¥–ª—è –æ—Ç–¥–∞–¥–æ—á–Ω—ã—Ö —Ü–µ–ª–µ–π. –í —É—Å—Ç–∞–Ω–æ–≤–∫–µ –æ–Ω–∏ –Ω–µ –Ω—É–∂–Ω—ã.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
SDimok
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. HL –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –º–∞—Ä 19, 2017 11:38:31 |
|
| –ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º |
 |
–ö–∞—Ä–º–∞: 21
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1015
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Ñ–µ–≤ 06, 2016 14:34:29
–°–æ–æ–±—â–µ–Ω–∏–π: 482
–û—Ç–∫—É–¥–∞: –°–∞—è–Ω—Å–∫, –ò—Ä–∫—É—Ç—Å–∫–∞—è –æ–±–ª–∞—Å—Ç—å
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
psychos –ø–∏—Å–∞–ª(–∞): bitwood, –º–æ–∂–µ—Ç –≤—Å—ë —Ç–∞–∫–∏ –Ω–∞ –ø–æ–ª–∏–≥–æ–Ω–∞–ª—å–Ω–æ–º –∑–µ—Ä–∫–∞–ª–µ —Å–¥–µ–ª–∞–µ–º, –∞ ? –ü–µ—Ä–µ–Ω–µ—Å –≤ –¥—Ä—É–≥—É—é —Ç–µ–º—É –°–ø–æ–π–ª–µ—Ähttp://radiokot.ru/forum/viewtopic.php?f=8&t=89531&p=3044138#p3044138
–ü–æ—Å–ª–µ–¥–Ω–∏–π —Ä–∞–∑ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞–ª–æ—Å—å SDimok –í—Å –º–∞—Ä 19, 2017 11:58:00, –≤—Å–µ–≥–æ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞–ª–æ—Å—å 1 —Ä–∞–∑.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
AlekseyEnergo
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. HL –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –º–∞—Ä 19, 2017 11:43:40 |
|
| –ú–æ–¥–µ—Ä–∞—Ç–æ—Ä |
 |
–ö–∞—Ä–º–∞: 23
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 331
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç —è–Ω–≤ 11, 2013 19:19:26
–°–æ–æ–±—â–µ–Ω–∏–π: 2117
–û—Ç–∫—É–¥–∞: –°–∞–Ω–∫—Ç-–ü–µ—Ç–µ—Ä–±—É—Ä–≥
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 1
")
|
|
–ü—Ä–æ –ø–æ–ª–∏–≥–æ–Ω–∞–ª—å–Ω–æ–µ –∑–µ—Ä–∫–∞–ª–æ –≤ –û–¢–î–ï–õ–¨–ù–£–Æ —Ç–µ–º—É. –ó–¥–µ—Å—å –¥—Ä—É–≥–∞—è –∫–æ–Ω—Å—Ç—Ä—É–∫—Ü–∏—è.
_________________
=========
–ü—Ä–∞–≤–∏–ª–∞ –§–æ—Ä—É–º–∞ –ó–î–ï–°–¨ _____ –ü—Ä–∞–≤–∏–ª–∞ —Ä–∞–∑–¥–µ–ª–∞ –ë–ê–ó–ê–Ý –ó–î–ï–°–¨ _____ –ï—Å–ª–∏ –≤—ã –ø—Ä–æ–¥–∞–µ—Ç–µ, –ø—Ä–æ—á—Ç–∏—Ç–µ –ó–î–ï–°–¨
–Ý–µ–¥–∫–æ –ø–æ—è–≤–ª—è—é—Å—å. –ï—Å–ª–∏ –≤–æ–ø—Ä–æ—Å –Ω–µ –ª–∏—á–Ω–æ–≥–æ —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∞ –ø–æ–ª—å–∑—É–π—Ç–µ—Å—å –∫–Ω–æ–ø–∫–æ–π "!".
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
mial
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. HL –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –º–∞—Ä 20, 2017 11:53:40 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
 |
–ö–∞—Ä–º–∞: 95
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2207
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —è–Ω–≤ 06, 2010 23:31:56
–°–æ–æ–±—â–µ–Ω–∏–π: 3254
–û—Ç–∫—É–¥–∞: –ë–æ—Ä–æ–≤–∏—á–∏, –ù–æ–≤–≥. –æ–±–ª.
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 14
–ú–µ–¥–∞–ª–∏: 1
")
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Ruzik
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. HL –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –º–∞—Ä 20, 2017 12:01:42 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
 |
–ö–∞—Ä–º–∞: 55
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1637
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –∏—é–Ω 09, 2011 17:17:47
–°–æ–æ–±—â–µ–Ω–∏–π: 5725
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ó–Ω–∞–∫–æ–º–∞—è –ø–ª–∞—Ç–∞ (–∫—Ä–∞—Å–Ω–∞—è), —Ç–æ–∂–µ –Ω–µ –¥–æ–∂–¥—É—Å—å, –∫–æ–≥–¥–∞ –Ω–∞—á–Ω—É –Ω–∞ —É—Å—Ç–∞–Ω–æ–≤–∫–µ –∑–∞—Å–≤–µ—á–∏–≤–∞—Ç—å.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
vsteshak
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. HL –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –º–∞—Ä 20, 2017 12:15:47 |
|
| –û–ø—ã—Ç–Ω—ã–π –∫–æ—Ç |
 |
–ö–∞—Ä–º–∞: 3
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 153
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –¥–µ–∫ 27, 2012 13:38:18
–°–æ–æ–±—â–µ–Ω–∏–π: 726
–û—Ç–∫—É–¥–∞: –ë–µ—Ä–¥–∏—á–µ–≤, –£–∫—Ä–∞–∏–Ω–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ò–Ω—Ç–µ—Ä–µ—Å–Ω–∞—è –∫—Ä–∞—Å–Ω–∞—è, —á—Ç–æ —ç—Ç–æ ? –°—Ö–µ–º–∞ –µ—Å—Ç—å ?
_________________
–ì–∏–Ω—É—Ç—å –Ω–∞—à—ñ –≤–æ—Ä–æ–∂–µ–Ω—å–∫–∏.

|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
mial
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. HL –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –º–∞—Ä 20, 2017 12:18:31 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
|
–ö–∞—Ä–º–∞: 95
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2207
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —è–Ω–≤ 06, 2010 23:31:56
–°–æ–æ–±—â–µ–Ω–∏–π: 3254
–û—Ç–∫—É–¥–∞: –ë–æ—Ä–æ–≤–∏—á–∏, –ù–æ–≤–≥. –æ–±–ª.
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 1
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
SDimok
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. HL –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –º–∞—Ä 20, 2017 16:04:43 |
|
| –ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º |
|
–ö–∞—Ä–º–∞: 21
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1015
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Ñ–µ–≤ 06, 2016 14:34:29
–°–æ–æ–±—â–µ–Ω–∏–π: 482
–û—Ç–∫—É–¥–∞: –°–∞—è–Ω—Å–∫, –ò—Ä–∫—É—Ç—Å–∫–∞—è –æ–±–ª–∞—Å—Ç—å
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
mial –ø–∏—Å–∞–ª(–∞): –ù–∞ –¥–Ω—è—Ö –ø–æ—Å—Ç–∞–≤–∏–ª –≤ —É—Å—Ç–∞–Ω–æ–≤–∫—É –ª–∞–∑–µ—Ä–Ω—ã–π –¥–∏–æ–¥ sld3239vfr –ì–¥–µ –±—Ä–∞–ª? –ü–æ—á–µ–º? –ö—Ä–∞—Å–Ω–∞—è –ø–ª–∞—Ç–∞, –∫–∞–∫–∏–µ —Ä–∞–∑–º–µ—Ä—ã? –°–ø–æ–π–ª–µ—Ä–ü–æ–∫–∞ –≤—Å–µ —è–∑—ã–∫–∞–º–∏ —á–µ—à—É—Ç - –≥—Ä–∞–º–æ—Ç–Ω—ã–µ –ª—é–¥–∏ –¥–µ–ª–∞—é—Ç –í–µ—â–∏ !!!
–ñ–∞–ª—å, —á—Ç–æ —ç—Ç–æ –Ω–µ –ø—Ä–æ –º–µ–Ω—è
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Ruzik
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞-–∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. HLDI –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –º–∞—Ä 20, 2017 16:17:50 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
|
–ö–∞—Ä–º–∞: 55
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1637
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –∏—é–Ω 09, 2011 17:17:47
–°–æ–æ–±—â–µ–Ω–∏–π: 5725
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 1
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
mial
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞-–∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. HLDI –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –º–∞—Ä 20, 2017 16:40:19 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
|
–ö–∞—Ä–º–∞: 95
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2207
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —è–Ω–≤ 06, 2010 23:31:56
–°–æ–æ–±—â–µ–Ω–∏–π: 3254
–û—Ç–∫—É–¥–∞: –ë–æ—Ä–æ–≤–∏—á–∏, –ù–æ–≤–≥. –æ–±–ª.
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 1
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Ruzik
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞-–∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. HLDI –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –º–∞—Ä 20, 2017 16:43:05 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
|
–ö–∞—Ä–º–∞: 55
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1637
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –∏—é–Ω 09, 2011 17:17:47
–°–æ–æ–±—â–µ–Ω–∏–π: 5725
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ê –≤–æ–æ–±—â–µ, –≤ —á–µ–º —Ä–∞–∑–Ω–∏—Ü–∞ –º–µ–∂–¥—É 3 –º–º –∏ 5 –º–º –ª–∞–∑–µ—Ä–∞–º–∏? –ß–∏—Ç–∞—é –≤ –æ—Ç–∑—ã–≤–∞—Ö –Ω–∞ –∞–ª–∏, —á—Ç–æ –ø—Ä–∏—à–ª–∏ –Ω–µ 5 –º–º, –∞ 3 –∏ —Å–∏–ª—å–Ω–æ —Ä–∞–∑–æ—á–∞—Ä–æ–≤–∞–Ω—ã.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
|
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 181 –∏–∑ 506
|
[ –°–æ–æ–±—â–µ–Ω–∏–π: 10105 ] |
... , , , , , , ... |
|
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –Ω–∞—á–∏–Ω–∞—Ç—å —Ç–µ–º—ã
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –æ—Ç–≤–µ—á–∞—Ç—å –Ω–∞ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ —É–¥–∞–ª—è—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –¥–æ–±–∞–≤–ª—è—Ç—å –≤–ª–æ–∂–µ–Ω–∏—è
|
|
|