Добрый день уважаемые господа!
Требуется разработать (или приспособить действующую схему или готовое устройство) контроллер (одноканальный) для объединения в общую схему различных устройств, которые в совокупности образуют систему стабилизации лёгкого самолёта (СЛА) статически неустойчивой схемы.
Более подробно тут http://sla-avia.ucoz.ru/forum/16-16-1
Общий принцип работы всей системы будет такой: Сервопривод должен пропорционально отрабатывать положение руля высоты (РВ) самолёта по сигналам от ручки управления самолётом (РУС) ("джойстика"), а при наличии возмущения по тангажу вызванного не РУС (возмущением воздушной среды) с гироскопа на сервопривод должен подаваться и отрабатываться корректирующий сигнал на перекладку РВ, для нейтрализации возмущения.
Предполагаемый состав устройств:
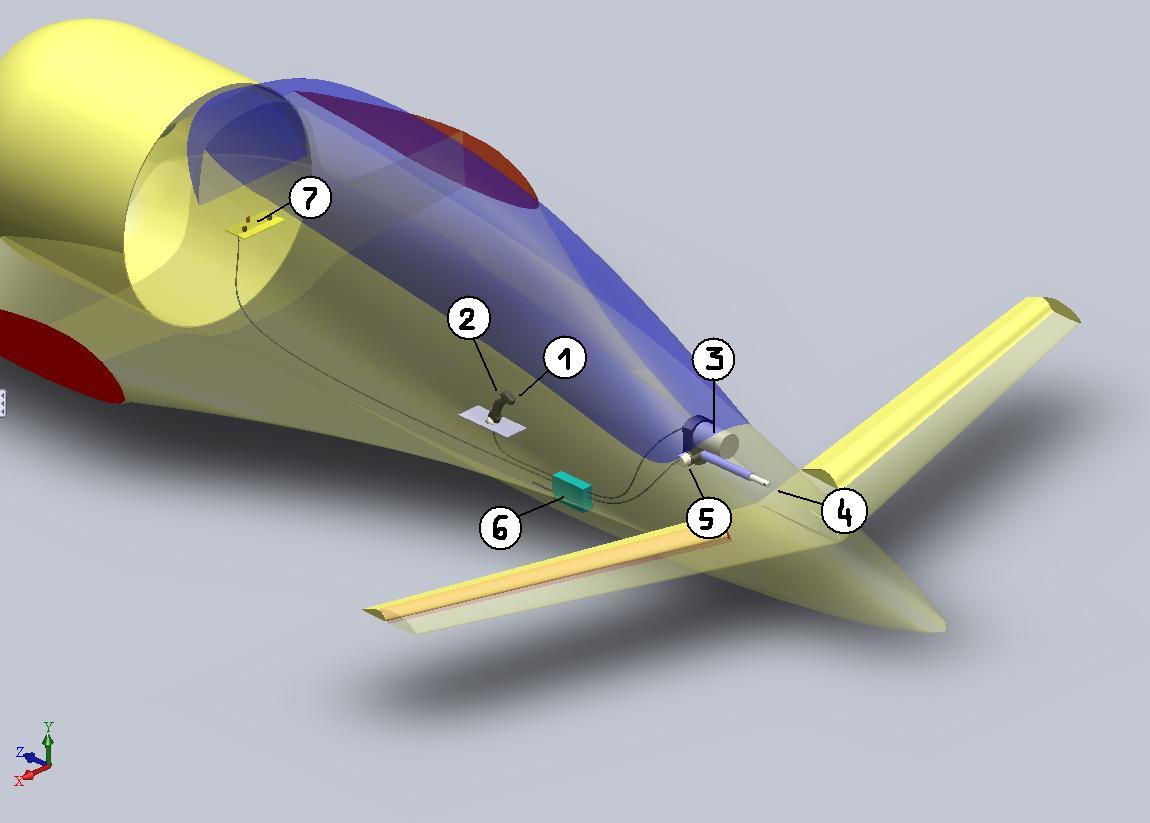
1. РУС
2. Потенциометр "триммера" (задает "0" для гироскопа)
3. Сервопривод типа UBA 1
5. Энкодер (либо Линейный потенциометр) для сервопривода
6. Блок управления сервоприводом - требуется разработать
7. Блок гироскопов (обычный модельный, типа Futaba Gyro GY401) - 1-3 шт
По теме:
а) название: пусть будет "блок ЭСДУ-П6M"
б) какие функции должно выполнять:
В основном режиме:
- автоматическую балансировку в продольном канале;
В основном и резервном режимах:
- возможность перезапуска в случае ложного отказа;
- непрерывный контроль исправности ЭДСУ в полете с выдачей информации об отказе;
- формирование информации о состоянии системы, о положении управляемых поверхностей, о выполнении подготовительных операций.
В двух словах, отклонению ручки (РУС) должно соответствовать пропорциональное движение штока сервопривода. Коррекция перемещения от переменного резистора "триммер" (на подобии схемы, которая приведена по ссылке выше) и от сигнала от гироскопа
в) технология по которой должно быть спроектировано/изготовлено - для начала общая схема и желательно плата (контроллер должен содержать возможность ручной коррекции (отдельный блок/пульт) чувствительности: гироскопов и сервопривода), например с помощью переменных резисторов.
г) требования к элементной базе - желательно отечественная
д)оптимальная (по моему мнению) стоимость готового устройства - не дороже 100 у.е. (либо ваше предложение)
е) сроки изготовления/проектирования - не критичны
ж) условия осуществления данной работы: - небольшое денежное вознаграждение (в случае, если данное устройство будет востребовано, участие в прибыли от реализации готовых изделий)
С уважением, Александр Макаров
P.S. Подобные контроллеры есть для радиоуправляемых моделей.
Требуется разработать (или приспособить действующую схему или готовое устройство) контроллер (одноканальный) для объединения в общую схему различных устройств, которые в совокупности образуют систему стабилизации лёгкого самолёта (СЛА) статически неустойчивой схемы.
Более подробно тут http://sla-avia.ucoz.ru/forum/16-16-1
Общий принцип работы всей системы будет такой: Сервопривод должен пропорционально отрабатывать положение руля высоты (РВ) самолёта по сигналам от ручки управления самолётом (РУС) ("джойстика"), а при наличии возмущения по тангажу вызванного не РУС (возмущением воздушной среды) с гироскопа на сервопривод должен подаваться и отрабатываться корректирующий сигнал на перекладку РВ, для нейтрализации возмущения.
Предполагаемый состав устройств:
1. РУС
2. Потенциометр "триммера" (задает "0" для гироскопа)
3. Сервопривод типа UBA 1
5. Энкодер (либо Линейный потенциометр) для сервопривода
6. Блок управления сервоприводом - требуется разработать
7. Блок гироскопов (обычный модельный, типа Futaba Gyro GY401) - 1-3 шт
По теме:
а) название: пусть будет "блок ЭСДУ-П6M"
б) какие функции должно выполнять:
В основном режиме:
- автоматическую балансировку в продольном канале;
В основном и резервном режимах:
- возможность перезапуска в случае ложного отказа;
- непрерывный контроль исправности ЭДСУ в полете с выдачей информации об отказе;
- формирование информации о состоянии системы, о положении управляемых поверхностей, о выполнении подготовительных операций.
В двух словах, отклонению ручки (РУС) должно соответствовать пропорциональное движение штока сервопривода. Коррекция перемещения от переменного резистора "триммер" (на подобии схемы, которая приведена по ссылке выше) и от сигнала от гироскопа
в) технология по которой должно быть спроектировано/изготовлено - для начала общая схема и желательно плата (контроллер должен содержать возможность ручной коррекции (отдельный блок/пульт) чувствительности: гироскопов и сервопривода), например с помощью переменных резисторов.
г) требования к элементной базе - желательно отечественная
д)оптимальная (по моему мнению) стоимость готового устройства - не дороже 100 у.е. (либо ваше предложение)
е) сроки изготовления/проектирования - не критичны
ж) условия осуществления данной работы: - небольшое денежное вознаграждение (в случае, если данное устройство будет востребовано, участие в прибыли от реализации готовых изделий)
С уважением, Александр Макаров
P.S. Подобные контроллеры есть для радиоуправляемых моделей.
Последний раз редактировалось avm Чт сен 03, 2009 17:21:41, всего редактировалось 2 раза.
- А если пилот левша? - Самолет - не инвалидная коляска.




