 |
 |
|||||||||||||||
–Ý–µ–≥—É–ª—è—Ç–æ—Ä —Å–∫–æ—Ä–æ—Å—Ç–∏ –±–æ—Ä–º–∞—à–∏–Ω–∫–∏, —Å–æ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏–µ–π –æ–±–æ—Ä–æ—Ç–æ–≤
–ê–≤—Ç–æ—Ä: pvit –í—Å—Ç—É–ø–ª–µ–Ω–∏–µ –ò–¥–µ—è –ø–æ–¥–æ–±–Ω–æ–≥–æ —Ä–µ–≥—É–ª—è—Ç–æ—Ä–∞ –≤–∏—Ç–∞–ª–∞ –≤ –≥–æ–ª–æ–≤–µ –¥–∞–≤–Ω–æ, –Ω–æ –∑–∞–Ω–∏–º–∞—Ç—å—Å—è –µ–π —Å—Ç–∞–ª–∏ –≤ —Ä–∞–º–∫–∞—Ö –±–æ–ª–µ–µ –º–∞—Å—à—Ç–∞–±–Ω–æ–π –∑–∞–¥–∞—á–∏ - —Ä–∞–∑–æ–±—Ä–∞—Ç—å—Å—è –∫–∞–∫ –Ω—ã–Ω—á–µ –º–æ–∂–Ω–æ –¥–µ–ª–∞—Ç—å –∫–∞—á–µ—Å—Ç–≤–µ–Ω–Ω—ã–µ –∏ –ø–æ–≤—Ç–æ—Ä—è–µ–º—ã–µ —Ö–æ–±–±–∏–π–Ω—ã–µ –ø—Ä–æ–µ–∫—Ç—ã –ø–æ–¥ —ç–º–±–µ–¥—ã. –ü—Ä–æ–ø—É—Å—Ç–∏–º –æ–ø–∏—Å–∞–Ω–∏–µ —Ç–≤–æ—Ä—á–µ—Å–∫–∏—Ö –º–µ—Ç–∞–Ω–∏–π, –∏ —Å—Ñ–æ—Ä–º—É–ª–∏—Ä—É–µ–º —Ä–µ–∑—É–ª—å—Ç–∞—Ç:
–û –±–æ—Ä–º–∞—à–∏–Ω–∫–∞—Ö –¢–µ, –∫—Ç–æ –ø–æ–ª—å–∑–æ–≤–∞–ª—Å—è –±–æ—Ä–º–∞—à–∏–Ω–∫–∞–º–∏, –∑–Ω–∞—é—Ç –ø—Ä–æ –∏—Ö “–±–µ–¥—ã”:
–•–æ—Ç–µ–ª–æ—Å—å –ø–æ–Ω—è—Ç—å, –º–æ–∂–µ–º –ª–∏ –º—ã –≤–∑—è—Ç—å —Å–∞–º—ã–π –¥–µ—à–µ–≤—ã–π –∫–∏—Ç–∞–π—Å–∫–∏–π “—à–ª–∞–∫”, –∑–∞–Ω–µ–¥–æ—Ä–æ–≥–æ –ø–æ–º–µ–Ω—è—Ç—å –≤ –Ω–µ–º —ç–ª–µ–∫—Ç—Ä–æ–Ω–∏–∫—É –∏ –ø–æ–ª—É—á–∏—Ç—å –∫–æ–Ω—Ñ–µ—Ç—É. –ü–æ–Ω—è—Ç–Ω–æ —á—Ç–æ —á—É–¥–µ—Å –Ω–µ –±—ã–≤–∞–µ—Ç, –ø–æ—ç—Ç–æ–º—É –æ—Å—Ç–∞–≤–∏–º –≤ —Å—Ç–æ—Ä–æ–Ω–µ –≤–æ–ø—Ä–æ—Å—ã –º–µ—Ö–∞–Ω–∏–∫–∏, —Ç–æ—á–Ω–æ—Å—Ç–∏, –∏ –∏–∑–≤–µ—á–Ω—ã–π —Ñ–∏–ª–æ—Å–æ—Ñ—Å–∫–∏–π –≤–æ–ø—Ä–æ—Å “—Å—Ç–æ–∏—Ç –ª–∏ –±—Ä–µ–Ω–¥–æ–≤—ã–π –∏–Ω—Å—Ç—Ä—É–º–µ–Ω—Ç —Å–≤–æ–∏—Ö –¥–µ–Ω–µ–≥”. –û—á–µ–Ω—å –º–Ω–æ–≥–∏–º —Ö–≤–∞—Ç–∏—Ç –∑–∞ –≥–ª–∞–∑–∞ –∏ –∫–∏—Ç–∞–π—Å–∫–∏—Ö “–ø–æ–¥–µ–ª–æ–∫”, –µ—Å–ª–∏ –æ–Ω–∏ –±—É–¥—É—Ç —É–≤–µ—Ä–µ–Ω–Ω–æ –¥–µ—Ä–∂–∞—Ç—å –æ–±–æ—Ä–æ—Ç—ã. –ò–∑–Ω–∞—á–∞–ª—å–Ω–æ –ø–ª–∞—Ç–∞ –¥–µ–ª–∞–ª–∞—Å—å –ø–æ–¥ –ø–æ–ø—É–ª—è—Ä–Ω—É—é –º–æ–¥–µ–ª—å Hilda 180W. –ù–æ —Ç–µ –±–æ—Ä–º–∞—à–∏–Ω–∫–∏ –ø–æ—Å—Ç–µ–ø–µ–Ω–Ω–æ –ø—Ä–æ–ø–∞–ª–∏ —Å —Ä—ã–Ω–∫–∞, –∏ —Ç–µ–∫—É—â–∏–µ –ø–ª–∞—Ç—ã —Å–¥–µ–ª–∞–Ω—ã –ø–æ–¥ Newacalox –∏ BDCAT. –ï—Å—Ç–µ—Å—Ç–≤–µ–Ω–Ω–æ, —Å–∞–º–∞ –∂–µ–ª–µ–∑–∫–∞ —É–Ω–∏–≤–µ—Ä—Å–∞–ª—å–Ω–∞—è. –¢–∞–∫ —á—Ç–æ –ø—Ä–∏ –∂–µ–ª–∞–Ω–∏–∏ –≤—ã –º–æ–∂–µ—Ç–µ –≤–Ω–µ—Å—Ç–∏ –ø–æ—Å–∏–ª—å–Ω—ã–π –≤–∫–ª–∞–¥ –≤ —É–ª—É—á—à–µ–Ω–∏–µ –º–∏—Ä–∞ –∏ —Ä–∞–∑–≤–µ—Å—Ç–∏ –ø–ª–∞—Ç—É –ø–æ–¥ —á—Ç–æ-–Ω–∏–±—É–¥—å –µ—â–µ. –ñ–µ–ª–µ–∑–æ
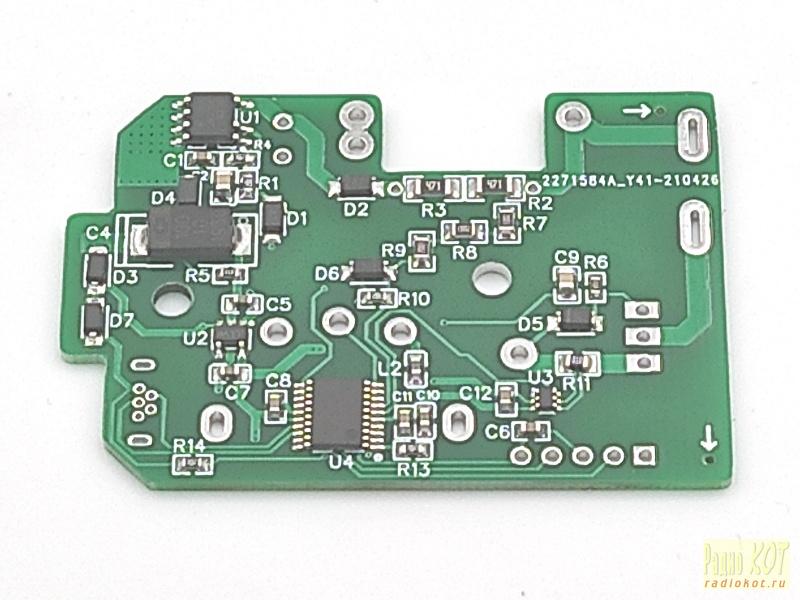
–°—Å—ã–ª–∫–∏ –Ω–∞ —Å—Ö–µ–º—ã –∏ –ø–ª–∞—Ç—ã —Å–º–æ—Ç—Ä–∏—Ç–µ –≤ –∏–Ω—Å—Ç—Ä—É–∫—Ü–∏–∏ –ø–æ —Å–±–æ—Ä–∫–µ. –û–Ω–∏ –º–æ–≥—É—Ç –æ—Ç–ª–∏—á–∞—Ç—å—Å—è –¥–ª—è —Ä–∞–∑–Ω—ã—Ö –±–æ—Ä–º–∞—à–∏–Ω–æ–∫. –í –∂–µ–ª–µ–∑–µ –Ω–µ—Ç –Ω–∏—á–µ–≥–æ –ø—Ä–∏–Ω—Ü–∏–ø–∏–∞–ª—å–Ω–æ –Ω–æ–≤–æ–≥–æ. –ü—Ä–æ—Å—Ç–æ –∫—É—á–∞ –º–µ–ª–∫–∏—Ö –Ω—é–∞–Ω—Å–æ–≤, –≤—Ä–æ–¥–µ –æ–¥–Ω–æ—Å—Ç–æ—Ä–æ–Ω–Ω–µ–≥–æ –º–æ–Ω—Ç–∞–∂–∞ SMD –∏ –∑–∞–ª–∏–≤–∫–∏ –ø—Ä–æ—à–∏–≤–∫–∏ –ø–æ USB, –∫–æ—Ç–æ—Ä—ã–µ —É–ø—Ä–æ—â–∞—é—Ç –∂–∏–∑–Ω—å. –ì–∞–ª—å–≤–∞–Ω–∏—á–µ—Å–∫–∞—è —Ä–∞–∑–≤—è–∑–∫–∞ —Ç—É—Ç –Ω–µ –Ω—É–∂–Ω–∞, –ø–æ—ç—Ç–æ–º—É –º–æ–∂–Ω–æ –ø—Ä–∏–ª–∏—á–Ω–æ —Å—ç–∫–æ–Ω–æ–º–∏—Ç—å. –ê –∂–µ–ª–∞—é—â–∏–µ –ø–æ–¥–µ–±–∞–∂–∏—Ç—å —Ä–∞–±–æ—á–∏–π –¥–µ–≤–∞–π—Å –ø–æ USB, –≤—Å–µ–≥–¥–∞ –º–æ–≥—É—Ç –≤–æ—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å—Å—è –∏–∑–æ–ª–∏—Ä—É—é—â–∏–º –ø–µ—Ä–µ—Ö–æ–¥–Ω–∏–∫–æ–º –∑–∞ 10 –¥–æ–ª–ª–∞—Ä–æ–≤. –ù–æ –ø—Ä–æ—Å—Ç—ã–º –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª—è–º –æ—Ç–ª–∞–¥–∫–∞ –≤ —Ä–µ–∞–ª—Ç–∞–π–º–µ –±–µ–∑ –Ω–∞–¥–æ–±–Ω–æ—Å—Ç–∏, –ø–æ—ç—Ç–æ–º—É —É–ø—Ä–æ—Å—Ç–∏–ª–∏ –≤—Å–µ —á—Ç–æ –º–æ–∂–Ω–æ. –ë–ª–æ–∫ –ø–∏—Ç–∞–Ω–∏—è —Å–¥–µ–ª–∞–Ω –Ω–∞ –∏–Ω–¥—É–∫—Ç–∏–≤–Ω–æ–π “–ø–æ–Ω–∏–∂–∞–π–∫–µ” LNK3204. –ú–æ–∂–Ω–æ –±—ã–ª–æ –±—ã —Å–¥–µ–ª–∞—Ç—å –∫–æ–Ω–¥–µ–Ω—Å–∞—Ç–æ—Ä–Ω–æ–µ –ø–∏—Ç–∞–Ω–∏–µ, –Ω–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∞—è —Å—Ö–µ–º–∞ –Ω–∞–º–Ω–æ–≥–æ –Ω–∞–¥–µ–∂–Ω–µ–µ, –∏ –±–µ–∑ –∏–∑–º–µ–Ω–µ–Ω–∏–π –±—É–¥–µ—Ç —Ä–∞–±–æ—Ç–∞—Ç—å –¥–∞–∂–µ –≤ –∞–º–µ—Ä–∏–∫–∞–Ω—Å–∫–æ–π —Å–µ—Ç–∏. –ü–æ –≥–∞–±–∞—Ä–∏—Ç–∞–º –∏ –Ω–∞–≥—Ä–µ–≤—É —Ç–æ–∂–µ –ø–æ–ª—É—á–∞–µ—Ç—Å—è –Ω–µ —Ö—É–∂–µ. –£–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Å–∏–º–∏—Å—Ç–æ—Ä–æ–º –ø–æ—Å–ª–µ –º–Ω–æ–≥–∏—Ö –ø–µ—Ä–µ–¥–µ–ª–æ–∫ —Å—Ç–∞–ª–æ “–ø—Ä—è–º—ã–º”, —á–µ—Ä–µ–∑ –∫–æ–Ω–¥–µ–Ω—Å–∞—Ç–æ—Ä. –ú–∞–∫—Å–∏–º–∞–ª—å–Ω–æ –¥–µ—à–µ–≤–æ –∏ —Å–µ—Ä–¥–∏—Ç–æ, –±–µ–∑ –∑–∞–º–æ—Ä–æ—á–µ–∫ —Å —Ä–∞–∑–≤–æ–¥–∫–æ–π –≤—ã—Å–æ–∫–æ–≤–æ–ª—å—Ç–Ω—ã—Ö —Å–Ω–∞–±–±–µ—Ä–Ω—ã—Ö —Ü–µ–ø–æ—á–µ–∫ –¥–ª—è –æ–ø—Ç—Ä–æ–Ω–∞. –ù–∞–ø—Ä—è–∂–µ–Ω–∏–µ —Å–µ—Ç–∏ –º–µ—Ä—è–µ—Ç—Å—è —Ç–æ–ª—å–∫–æ –¥–ª—è –ø–æ–ª–æ–∂–∏—Ç–µ–ª—å–Ω–æ–π –ø–æ–ª—É-–≤–æ–ª–Ω—ã - —Ç–æ–∂–µ –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ –ø—Ä–æ—Å—Ç–æ–µ —Å–æ–≥–ª–∞—Å–æ–≤–∞–Ω–∏–µ, —á–µ—Ä–µ–∑ –¥–µ–ª–∏—Ç–µ–ª—å. –¢–æ–∫–æ–≤—ã–π —à—É–Ω—Ç —Å–¥–µ–ª–∞–Ω —Å —É—Å–∏–ª–∏—Ç–µ–ª–µ–º 50x –Ω–∞ INA213. –≠—Ç–æ –ø–æ–∂–∞–ª—É–π –µ–¥–∏–Ω—Å—Ç–≤–µ–Ω–Ω–∞—è –º–∏–∫—Ä–æ—Å—Ö–µ–º–∞, –∫–æ—Ç–æ—Ä—É—é –Ω–µ –æ—á–µ–Ω—å —É–¥–æ–±–Ω–æ –ø–∞—è—Ç—å, –Ω–æ —Ä–µ–∑—É–ª—å—Ç–∞—Ç —Ç–æ–≥–æ —Å—Ç–æ–∏—Ç. –¶–µ–Ω–∞ –≤—Å–µ–≥–æ –ø–æ–ª –±–∞–∫—Å–∞, –∏ –≤ —Ä–µ–∑—É–ª—å—Ç–∞—Ç–µ —à—É–Ω—Ç –ø–æ–ª–Ω–æ—Å—Ç—å—é —Ö–æ–ª–æ–¥–Ω—ã–π. –ü–ª—é—Å –Ω–µ –ø–æ–Ω–∞–¥–æ–±–∏—Ç—Å—è –Ω–∏—á–µ–≥–æ –º–µ–Ω—è—Ç—å –ø–æ–¥ –∞–º–µ—Ä–∏–∫–∞–Ω—Å–∫—É—é —Å–µ—Ç—å - –∑–∞–ø–∞—Å–∞ –Ω–∞–≤–∞–ª–æ–º. –ü—Ä–∞–≤–¥–∞, –µ—Å—Ç—å –Ω—é–∞–Ω—Å - —Ö–æ—Ç—å —É –æ–ø–µ—Ä–∞—Ü–∏–æ–Ω–Ω–∏–∫–∞ –∏ –Ω–∏–∑–∫–æ–µ —Å–º–µ—â–µ–Ω–∏–µ, –Ω–æ –æ–Ω–æ –µ—Å—Ç—å. –ü–æ—ç—Ç–æ–º—É –ê–¶–ü –Ω–∏–∫–æ–≥–¥–∞ –Ω–µ –ø–æ–∫–∞–∂–µ—Ç —Ä–æ–≤–Ω–æ –Ω–æ–ª—å —Ç–æ–∫–∞ (–≤ –æ—Ç–ª–∏—á–∏–µ –æ—Ç —Ü–µ–ø–æ—á–∫–∏ –∏–∑–º–µ—Ä–µ–Ω–∏—è –Ω–∞–ø—Ä—è–∂–µ–Ω–∏—è). –ù–∞–¥–æ —ç—Ç–æ —É—á–∏—Ç—ã–≤–∞—Ç—å –≤ —Å–æ—Ñ—Ç–µ. –ü—Ä–æ—Ü–µ—Å—Å–æ—Ä –∏–∑–Ω–∞—á–∞–ª—å–Ω–æ –±—ã–ª STM32F103C8T6, –Ω–æ –≤ –∏—Ç–æ–≥–µ –≤—Å–µ –≤–ø–∏—Å–∞–ª–æ—Å—å –≤ STM32F042F6P6. –ú–æ–∂–Ω–æ –≤–∑—è—Ç—å –µ—â–µ –ø—Ä–æ—â–µ, –≤—ã–∫–∏–Ω—É–≤ –∑–∞–ª–∏–≤–∫—É –ø–æ USB, –Ω–æ —Å–º—ã—Å–ª–∞ –≤ —Ç–∞–∫–æ–π –∫–æ–ø–µ–µ—á–Ω–æ–π —ç–∫–æ–Ω–æ–º–∏–∏ —É–∂–µ –º–∞–ª–æ. –°–æ—Ñ—Ç –û–±—â–∏–µ –º–æ–º–µ–Ω—Ç—ã –í—Å–µ —Ç–∞–∫—Ç–∏—Ä—É–µ—Ç—Å—è –æ—Ç –ê–¶–ü. –í –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è—Ö –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç:
–¢–æ –µ—Å—Ç—å, –≤—Å–µ realtime –æ–ø–µ—Ä–∞—Ü–∏–∏ –≤—ã–ø–æ–ª–Ω—è—é—Ç—Å—è –≤ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è—Ö, –∞ –¥–∞–ª—å—à–µ –¥–∞–Ω–Ω—ã–µ —á–µ—Ä–µ–∑ –æ—á–µ—Ä–µ–¥—å —Å–æ–æ–±—â–µ–Ω–∏–π —É–ª–µ—Ç–∞—é—Ç –≤ main loop. –¢–∞–º –Ω–∞—Ö–æ–¥—è—Ç—Å—è –º–µ–Ω–µ–µ –∫—Ä–∏—Ç–∏—á–Ω—ã–µ –∫ –æ—Ç–∫–ª–∏–∫—É –≤–µ—â–∏:
–î–æ —Ç—Ä–µ—Ç–µ–π –≤–µ—Ä—Å–∏–∏ —Å–æ—Ñ—Ç–∞, –≤ —Ä–µ–≥—É–ª—è—Ç–æ—Ä–µ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–ª—Å—è PID. –ù–æ –¥–ª—è –Ω–æ—Ä–º–∞–ª—å–Ω–æ–π —Ä–∞–±–æ—Ç—ã –µ–º—É —Ç—Ä–µ–±–æ–≤–∞–ª–∞—Å—å “–ª–∏–Ω–µ–∞—Ä–∏–∑–∞—Ü–∏—è” –º–æ—Ç–æ—Ä–∞. –ß—Ç–æ —Å–∞–º–æ –ø–æ —Å–µ–±–µ –Ω–µ –æ—á–µ–Ω—å –ø—Ä–æ—Å—Ç–æ, –∞ —Å —É—á–µ—Ç–æ–º –≤–ª–∏—è–Ω–∏—è –∫—Ä—ã–ª—å—á–∞—Ç–∫–∏ –æ–±–¥—É–≤–∞ - —Å–æ–≤—Å–µ–º –≥—Ä—É—Å—Ç–Ω–æ. –ü–µ—Ä–µ—Ö–æ–¥ –Ω–∞ ADRC –ø–æ–∑–≤–æ–ª–∏–ª –∏–∑–±–∞–≤–∏—Ç—å—Å—è –æ—Ç “–∫–æ—Å—Ç—ã–ª–µ–π”, –∏ —Å–¥–µ–ª–∞–ª –Ω–∞—Å—Ç—Ä–æ–π–∫—É –Ω–∞ —Ä–∞–∑–Ω—ã–µ –º–æ—Ç–æ—Ä—ã –Ω–∞–º–Ω–æ–≥–æ –ø—Ä–æ—â–µ. –ú–∞—Ç–µ–º–∞—Ç–∏–∫—É –ø—Ä–∏—à–ª–æ—Å—å –¥–µ–ª–∞—Ç—å —Å —Ñ–∏–∫—Å–∏—Ä–æ–≤–∞–Ω–Ω–æ–π —Ç–æ—á–∫–æ–π. –î–ª—è —ç—Ç–æ–≥–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–ª–∏ –ø—Ä–µ–∫—Ä–∞—Å–Ω—É—é –±–∏–±–ª–∏–æ—Ç–µ–∫—É libfixmath. –•–æ—á–µ—Ç—Å—è –µ—â–µ –æ—Ç–º–µ—Ç–∏—Ç—å –±–∏–±–ª–∏–æ—Ç–µ–∫—É ETL, –≥–¥–µ –≥—Ä–∞–º–æ—Ç–Ω–æ —Ä–µ–∞–ª–∏–∑–æ–≤–∞–Ω—ã —Ç–∏–ø–æ–≤—ã–µ –ø–∞—Ç—Ç–µ—Ä–Ω—ã (–Ω–∞–ø—Ä–∏–º–µ—Ä - –æ—á–µ—Ä–µ–¥–∏). –¢–∞–∫–∂–µ –æ–±—Ä–∞—Ç–∏—Ç–µ –≤–Ω–∏–º–∞–Ω–∏–µ –Ω–∞ protothreads. –ê —Ç–æ—á–Ω–µ–µ, –Ω–∞ —Å–ø–æ—Å–æ–±—ã —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏ YIELD, –∫–æ—Ç–æ—Ä—ã–π –∏–∑–±–∞–≤–ª—è–µ—Ç –∫–æ–¥ –æ—Ç –∫–æ–Ω—Å–∫–∏—Ö switch-–µ–π –∏ —É–ø—Ä–æ—â–∞–µ—Ç —á—Ç–µ–Ω–∏–µ –æ—á–µ–Ω—å –¥–ª–∏–Ω–Ω–æ–π –ª–æ–≥–∏–∫–∏ (—Ç–∞–∫–æ–π –∫–∞–∫ –≤ –∫–∞–ª–∏–±—Ä–∞—Ç–æ—Ä–µ). ETL + YIELD –ø–æ–∑–≤–æ–ª—è—é—Ç –Ω–µ —Ç–∞—â–∏—Ç—å RTOS –±–µ–∑ –æ—Å–æ–±–æ–π –Ω—É–∂–¥—ã. –ò –ø—Ä–∏ —ç—Ç–æ–º –∫–æ–¥ –Ω–µ –ø—Ä–µ–≤—Ä–∞—â–∞–µ—Ç—Å—è –≤ –∞–¥. –ë–∞–∑–æ–≤—É—é –∫–æ–Ω—Ñ–∏–≥—É—Ä–∞—Ü–∏—é MCU —Å–¥–µ–ª–∞–ª–∏ —Å –ø–æ–º–æ—â—å—é CubeMX. –ü–æ—Å–∫–æ–ª—å–∫—É –º—ã –Ω–µ –∑–∞—Ä–∞–±–∞—Ç—ã–≤–∞–µ–º –Ω–∞ –∂–∏–∑–Ω—å —Ä–∞–∑—Ä–∞–±–æ—Ç–∫–æ–π –∂–µ–ª–µ–∑–∞ –∏ –Ω–µ –≤–∞—Ä–∏–º—Å—è –≤ —ç—Ç–æ–π –∫—É—Ö–Ω–µ –µ–∂–µ–¥–Ω–µ–≤–Ω–æ, —Ç—Ä–∞—Ç–∏—Ç—å –≤—Ä–µ–º—è –Ω–∞ –¥–µ—Ç–∞–ª—å–Ω–æ–µ –∏–∑—É—á–µ–Ω–∏–µ –º–∞–Ω—É–∞–ª–æ–≤ –ø–æ –∫–∞–∂–¥–æ–º—É –ø—Ä–æ—Ü–µ—Å—Å–æ—Ä—É –±—ã–ª–æ –Ω–µ –∏–Ω—Ç–µ—Ä–µ—Å–Ω–æ. –ö–æ–Ω–µ—á–Ω–æ CubeMX —Å—Ç—Ä–∞–Ω–Ω–æ–≤–∞—Ç, –∏ –≥–µ–Ω–µ—Ä–∏—Ä—É–µ—Ç —Å—Ç—Ä–∞–Ω–Ω–æ–≤–∞—Ç—ã–µ –∫–æ–Ω—Å—Ç—Ä—É–∫—Ü–∏–∏. –ù–æ –∞–ª—å—Ç–µ—Ä–Ω–∞—Ç–∏–≤ –ø–æ–ª—É—á—à–µ –ø–æ–∫–∞ –Ω–µ –Ω–∞–±–ª—é–¥–∞–µ—Ç—Å—è. –í –æ–±—â–µ–º, –∑–∞–¥–≤–∏–Ω—É–ª–∏ –≤—Å–µ —á—Ç–æ —Å–≤—è–∑–∞–Ω–æ —Å CubeMX –≤ –æ—Ç–¥–µ–ª—å–Ω—ã–µ –ø–∞–ø–∫–∏, –∫—É–¥–∞ –º–æ–∂–Ω–æ –±–æ–ª—å—à–µ –Ω–µ –∑–∞–≥–ª—è–¥—ã–≤–∞—Ç—å (—á—Ç–æ–±—ã –≥–ª–∞–∑–∞ –Ω–µ –ª–æ–ø–Ω—É–ª–∏). –£ PlaformIO –µ—Å—Ç—å –≤—Å—Ç—Ä–æ–µ–Ω–Ω—ã–µ –≤–µ—Ä—Å–∏–∏ stm32 hal. –ù–æ –æ–Ω–∏ —Å—Ç–∞—Ä—ã–µ, –∏ –±–µ–∑ –Ω–µ–∫–æ—Ç–æ—Ä—ã—Ö middlewares. –ü–æ—ç—Ç–æ–º—É –º—ã –∏—Å–ø–æ–ª—å–∑—É–µ–º —Ü–µ–ª–∏–∫–æ–º —Ç–æ, —á—Ç–æ –≥–µ–Ω–µ—Ä–∏—Ä—É–µ—Ç CubeMX. –ß—Ç–æ–±—ã –ø—Ä–∏ –∞–ø–≥—Ä–µ–π–¥–∞—Ö –Ω–µ –±—ã–ª–æ –∫–æ–Ω—Ñ–ª–∏–∫—Ç–æ–≤ –≤–µ—Ä—Å–∏–π. –ú–∞—Ç–µ–º–∞—Ç–∏–∫–∞ –í –ø–∞–ø–∫–µ –¥–æ–∫—É–º–µ–Ω—Ç–∞—Ü–∏–∏ –≤—ã–ª–æ–∂–µ–Ω—ã –≤—Å–µ –ø–æ–¥—Ä–æ–±–Ω–æ—Å—Ç–∏:
–û–±—Ä–∞—Ç–∏—Ç–µ –≤–Ω–∏–º–∞–Ω–∏–µ, –ø—Ä–µ–¥–ø–æ–ª–∞–≥–∞–ª–æ—Å—å, —á—Ç–æ –Ω–∞ –ø–æ–¥–æ–±–Ω—ã—Ö "–º–µ–ª–∫–∏—Ö" –º–æ—Ç–æ—Ä–∞—Ö —Å—Ç–∞—Ç–æ—Ä –Ω–µ –≤—Ö–æ–¥–∏—Ç –≤ –Ω–∞—Å—ã—â–µ–Ω–∏–µ. –ò–Ω–∞—á–µ –≤—ã–≤–æ–¥–∏—Ç—å –≤—ã—Ä–∞–∂–µ–Ω–∏—è –≤ –∞–Ω–∞–ª–∏—Ç–∏—á–µ—Å–∫–æ–º –≤–∏–¥–µ –±—ã–ª–æ –±—ã —Å–æ–≤—Å–µ–º –≥—Ä—É—Å—Ç–Ω–æ. –ê–≤—Ç–æ–∫–∞–ª–∏–±—Ä–æ–≤–∫–∞ –ü–æ –±–æ–ª—å—à–æ–º—É —Å—á–µ—Ç—É, –µ—Å–ª–∏ –¥–µ–ª–∞—Ç—å —Ä–µ–≥—É–ª—è—Ç–æ—Ä —Ç–æ–ª—å–∫–æ –ø–æ–¥ –∫–æ–Ω–∫—Ä–µ—Ç–Ω—É—é “—Ö–∏–ª—å–¥—É”, –º–æ–∂–Ω–æ –±—ã–ª–æ –±—ã –ø—Ä–æ—Å—Ç–æ –∑–∞–±–∏—Ç—å –≤ –∫–æ–Ω—Ñ–∏–≥ –∫–æ–Ω—Å—Ç–∞–Ω—Ç—ã. –ù–æ —ç—Ç–æ –Ω–µ –Ω–∞—à –º–µ—Ç–æ–¥. –•–æ—Ç–µ–ª–æ—Å—å —á—Ç–æ–±—ã —Ä–µ–≥—É–ª—è—Ç–æ—Ä —Ä–∞–±–æ—Ç–∞–ª —Å –ª—é–±—ã–º–∏ –º–æ—Ç–æ—Ä–∞–º–∏, –∏ –≤ –ª—é–±–æ–π —Å–µ—Ç–∏ (–∏ 220 –∏ 110 –≤–æ–ª—å—Ç). –ó–∞—è–≤–ª—è—Ç—å –∂–∏–≤—ã–º –ª—é–¥—è–º “–ø–æ–¥–∫—Ä—É—Ç–∏—Ç–µ –ø–∞—Ä–∞–º–µ—Ç—Ä—ã –≤ –∏—Å—Ö–æ–¥–Ω–∏–∫–∞—Ö” - —ç—Ç–æ –ø–∏–æ–Ω–µ—Ä–ª–∞–≥–µ—Ä—å –∏ —Å—Ç—ã–¥–æ–±–∞. –í –∏–¥–µ–∞–ª–µ —É –Ω–æ—Ä–º–∞–ª—å–Ω–æ–≥–æ –¥–µ–≤–∞–π—Å–∞ –¥–æ–ª–∂–Ω–∞ –±—ã—Ç—å –º–∞–∫—Å–∏–º—É–º –æ–¥–Ω–∞ –∫–Ω–æ–ø–∫–∞ - “—Å–¥–µ–ª–∞—Ç—å –≤—Å–µ –∫—Ä—É—Ç–æ”. –ê –ª—É—á—à–µ –≤–æ–æ–±—â–µ –±–µ–∑ –Ω–µ–µ, —á—Ç–æ–±—ã –∫—Ä—É—Ç–æ –±—ã–ª–æ —Å—Ä–∞–∑—É. –ü–æ—ç—Ç–æ–º—É —Ä–µ—à–∏–ª–∏ –ø–æ—Ç—Ä–∞—Ç–∏—Ç—å –≤—Ä–µ–º—è –Ω–∞ –∞–≤—Ç–æ–∫–∞–ª–∏–±—Ä–æ–≤–∫—É. –î–ª—è —ç—Ç–æ–≥–æ –Ω–∞–¥–æ:
–ù–æ —Å–Ω–∞—á–∞–ª–∞ –ø–æ—Ç—Ä–µ–±–æ–≤–∞–ª–æ—Å—å –ø—Ä–∏–¥—É–º–∞—Ç—å —É–¥–æ–±–Ω—ã–π —Å–ø–æ—Å–æ–± –∑–∞–ø—É—Å–∫–∞ –∞–≤—Ç–æ–∫–∞–ª–∏–±—Ä–æ–≤–∫–∏. –í –∏—Ç–æ–≥–µ –æ—Å—Ç–∞–Ω–æ–≤–∏–ª–∏—Å—å –Ω–∞ —Ç–æ–º, —á—Ç–æ –Ω–∞–¥–æ —É—Å—Ç–∞–Ω–æ–≤–∏—Ç—å —Ä—É—á–∫—É —Å–∫–æ—Ä–æ—Å—Ç–∏ –≤ –Ω–æ–ª—å, –∏ –±—ã—Å—Ç—Ä–æ –¥–µ—Ä–Ω—É—Ç—å –µ–µ —Ç—Ä–∏ —Ä–∞–∑–∞ —Ç—É–¥–∞-—Å—é–¥–∞. –°–∞–º—É –º–∞—Ç–µ–º–∞—Ç–∏–∫—É –º–æ–∂–Ω–æ –ø–æ—Å–º–æ—Ç—Ä–µ—Ç—å –≤ –∏—Å—Ö–æ–¥–Ω–∏–∫–∞—Ö, –æ–Ω–∏ –ø–æ–¥—Ä–æ–±–Ω–æ –ø—Ä–æ–∫–æ–º–º–µ–Ω—Ç–∏—Ä–æ–≤–∞–Ω—ã. –ù—É –∏ –∫–æ–Ω–µ—á–Ω–æ –≤ –ø–∞–ø–∫–µ –¥–æ–∫—É–º–µ–Ω—Ç–∞—Ü–∏–∏ –∑–∞–ø–∏—Å–∞–Ω—ã –≤—Å–µ –∞–ª–≥–æ—Ä–∏—Ç–º—ã –∏ —Ä–µ–∫–æ–º–µ–Ω–¥–∞—Ü–∏–∏ - –Ω–∞ —Å–ª—É—á–∞–π –µ—Å–ª–∏ –∫–æ–º—É-—Ç–æ –ø–æ–Ω–∞–¥–æ–±–∏—Ç—Å—è –ø–æ–≤—Ç–æ—Ä–∏—Ç—å –ø–æ–¥–æ–±–Ω–æ–µ. –î–ª—è —Ö—Ä–∞–Ω–µ–Ω–∏—è –∫–æ–Ω—Å—Ç–∞–Ω—Ç –∏—Å–ø–æ–ª—å–∑—É–µ–º –≤–Ω—É—Ç—Ä–µ–Ω–Ω–∏–π flash. –¢.–∫. eeprom –≤ –Ω–∞—à–µ–º —á–∏–ø–µ –Ω–µ—Ç, —Ç–æ –Ω–∞–ø–∏—Å–∞–ª–∏ —Å—Ç–∞–Ω–¥–∞—Ä—Ç–Ω—ã–π —ç–º—É–ª—è—Ç–æ—Ä –¥–ª—è —ç–∫–æ–Ω–æ–º–Ω–æ–≥–æ —Ä–∞—Å—Ö–æ–¥–æ–≤–∞–Ω–∏—è —Ä–µ—Å—É—Ä—Å–æ–≤ flash-–ø–∞–º—è—Ç–∏. –°–∞–º–∏ –∫–æ–Ω—Å—Ç–∞–Ω—Ç—ã –¥–ª—è –ø—Ä–æ—Å—Ç–æ—Ç—ã —Ö—Ä–∞–Ω–∏–º –≤ —Ñ–æ—Ä–º–∞—Ç–µ float (–ø–æ 4 –±–∞–π—Ç–∞ –Ω–∞ –∫–æ–Ω—Å—Ç–∞–Ω—Ç—É). –î–∞–∂–µ —Ç–∞–º, –≥–¥–µ —Ç–∞–∫–∞—è —Ç–æ—á–Ω–æ—Å—Ç—å –Ω–µ —Ç—Ä–µ–±—É–µ—Ç—Å—è - –Ω–µ—Ç —Å–º—ã—Å–ª–∞ —ç–∫–æ–Ω–æ–º–∏—Ç—å —Ü–µ–Ω–æ–π —É—Å–ª–æ–∂–Ω–µ–Ω–∏—è —Å–æ—Ñ—Ç–∞. –ü–æ –≤—Ä–µ–º–µ–Ω–∏ –∫–∞–ª–∏–±—Ä–æ–≤–∫–∞ –∑–∞–Ω–∏–º–∞–µ—Ç –æ–∫–æ–ª–æ –ø–æ–ª—É—Ç–æ—Ä–∞ –º–∏–Ω—É—Ç. –£—á–∏—Ç—ã–≤–∞—è, —á—Ç–æ –ø–æ–¥–æ–±–Ω–æ–µ –Ω—É–∂–Ω–æ –ø—Ä–æ–¥–µ–ª–∞—Ç—å —Ç–æ–ª—å–∫–æ –æ–¥–Ω–∞–∂–¥—ã - –Ω–æ—Ä–º–∞–ª—å–Ω–æ. –°–±–æ—Ä–∫–∞ https://github.com/speedcontrols/ac_sc_grinder - –≤–µ—Å—å –ø—Ä–æ—Ü–µ—Å—Å –æ–ø–∏—Å–∞–Ω –Ω–∞ —Å—Ç—Ä–∞–Ω–∏—Ü–µ –ø—Ä–æ–µ–∫—Ç–∞, –¥–æ–±–∞–≤–∏—Ç—å –æ—Å–æ–±–æ –Ω–µ—á–µ–≥–æ.
–ï—Å–ª–∏ –≤–∫—Ä–∞—Ç—Ü–µ:
–ò–º–µ–π—Ç–µ –≤ –≤–∏–¥—É, —á—Ç–æ –±–æ—Ä–º–∞—à–∏–Ω–∫–∞ –≤–æ –≤—Ä–µ–º—è —Ä–∞–±–æ—Ç—ã –±–æ–¥—Ä–æ –≤—Å–∞—Å—ã–≤–∞–µ—Ç –ø—ã–ª—å, –ø–æ—ç—Ç–æ–º—É –ª—É—á—à–µ –ø–æ–∫—Ä—ã—Ç—å –ø–ª–∞—Ç—É –∑–∞—â–∏—Ç–Ω—ã–º –ª–∞–∫–æ–º (–≤ –º–∞–≥–∞–∑–∏–Ω–∞—Ö —Ä–∞–¥–∏–æ–¥–µ—Ç–∞–ª–µ–π —Ç–∞–∫–æ–µ –¥–æ–±—Ä–æ –µ—Å—Ç—å). –û—Å–æ–±–æ —Å—Ç–∞—Ä–∞—Ç—å—Å—è –Ω–µ –Ω–∞–¥–æ, –º–æ–∂–Ω–æ —Ö–æ—Ç—å –∫–∏—Å—Ç–æ—á–∫–æ–π –æ–±–º–∞–∑–∞—Ç—å. –ü–ª–∞—Ç–∞ –±–µ–∑ –ª–∞–∫–∞ –≤–æ–≤—Å–µ –Ω–µ –æ–±—è–∑–∞—Ç–µ–ª—å–Ω–æ –Ω–∞–≤–µ—Ä–Ω–µ—Ç—Å—è, –Ω–æ –ª—É—á—à–µ –Ω–µ —Ä–∏—Å–∫–æ–≤–∞—Ç—å. –ü–æ –¥–µ–Ω—å–≥–∞–º —ç–ª–µ–∫—Ç—Ä–æ–Ω–∏–∫–∞ –æ–±–æ–π–¥–µ—Ç—Å—è –º–µ–Ω—å—à–µ 10 –¥–æ–ª–ª–∞—Ä–æ–≤. –ü—Ä–∞–≤–¥–∞, –¥–ª—è –æ–¥–Ω–æ–π —à—Ç—É–∫–∏ —Ç–æ—á–Ω–æ –Ω–∏–∫—Ç–æ –Ω–µ —Å—á–∏—Ç–∞–ª. –ü–ª–∞—Ç –≤–µ–¥—å –±—É–¥–µ—Ç —Å—Ä–∞–∑—É –ø—è—Ç—å, —Ä–µ–∑–∏—Å—Ç–æ—Ä–æ–≤ –º–µ–Ω—å—à–µ —Å–æ—Ç–Ω–∏ –Ω–µ –ø—Ä–æ–¥–∞—é—Ç, –∏ —Ç.–ø. –° –¥—Ä—É–≥–æ–π —Å—Ç–æ—Ä–æ–Ω—ã, –º–æ–∂–Ω–æ –≤–µ–¥—å —Å—Ä–∞–∑—É —Å–æ–±—Ä–∞—Ç—å –ø–ª–∞—Ç—ã –µ—â–µ –∏ –¥—Ä—É–∑—å—è–º :). –ü—Ä–∏ –∂–µ–ª–∞–Ω–∏–∏ –º–æ–∂–Ω–æ —Ä–∞–∑–æ—Ä–∏—Ç—å—Å—è –Ω–∞ —Ç—Ä–∞—Ñ–∞—Ä–µ—Ç –¥–ª—è –ø–∞—è–ª—å–Ω–æ–π –ø–∞—Å—Ç—ã. –û–Ω —Å—Ç–æ–∏—Ç –≤—Å–µ–≥–æ 7 –¥–æ–ª–ª–∞—Ä–æ–≤. –í–æ–æ–±—â–µ –º—ã —Ç–∞–∫–∏–µ –ø–ª–∞—Ç—ã —Å–æ–±–∏—Ä–∞–µ–º —Ñ–µ–Ω–æ–º (—á–µ–≥–æ –∏ –≤–∞–º –∂–µ–ª–∞–µ–º), –Ω–æ –ø–∞—è–ª—å–Ω–∏–∫–æ–º —Ç–æ–∂–µ –≤–ø–æ–ª–Ω–µ —Ä–µ–∞–ª—å–Ω–æ. –ê–≤—Ç–æ—Ä—ã: –û–ª–µ–≥ –ö–∞–ø–∏—Ç–æ–Ω–æ–≤ –∏ –í–∏—Ç–∞–ª–∏–π –ü—É–∑—Ä–∏–Ω.
–í—Å–µ –≤–æ–ø—Ä–æ—Å—ã –≤ –§–æ—Ä—É–º.
|
|
|||||||||||||||
 |
 |


 |
||||

|
||||



–Ý–∞–±–æ—Ç–æ—Å–ø–æ—Å–æ–±–Ω–æ—Å—Ç—å —Å–∞–π—Ç–∞ –ø—Ä–æ–≤–µ—Ä–µ–Ω–∞ –≤ –±—Ä–∞—É–∑–µ—Ä–∞—Ö:
IE8.0, Opera 9.0, Netscape Navigator 7.0, Mozilla Firefox 5.0
–ê–¥–∞–ø—Ç–∏—Ä–æ–≤–∞–Ω –¥–ª—è —Ä–∞–±–æ—Ç—ã –ø—Ä–∏ —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è—Ö —ç–∫—Ä–∞–Ω–∞ –æ—Ç 1280—Ö1024 –∏ –≤—ã—à–µ.
–ü—Ä–∏ –º–µ–Ω—å—à–∏—Ö —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è—Ö –≤–æ–∑–º–æ–∂–Ω–æ –ø–æ—è–≤–ª–µ–Ω–∏–µ –≥–æ—Ä–∏–∑–æ–Ω—Ç–∞–ª—å–Ω–æ–π –ø—Ä–æ–∫—Ä—É—Ç–∫–∏.
–ü–æ –≤—Å–µ–º –≤–æ–ø—Ä–æ—Å–∞–º –æ–±—Ä–∞—â–∞–π—Ç–µ—Å—å –∫ –ö–æ—Ç—É: kot@radiokot.ru
©2005-2026