 |
 |
||||||||||||
–û —Ä–∞–±–æ—Ç–µ —Å —Å–µ–Ω—Å–æ—Ä–Ω—ã–º–∏ –∫–Ω–æ–ø–∫–∞–º–∏
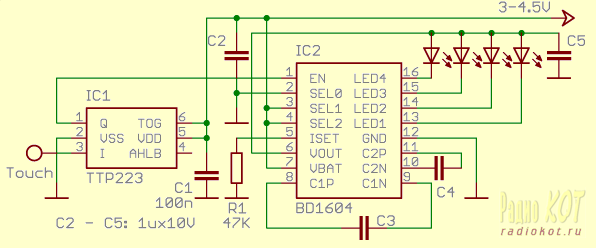
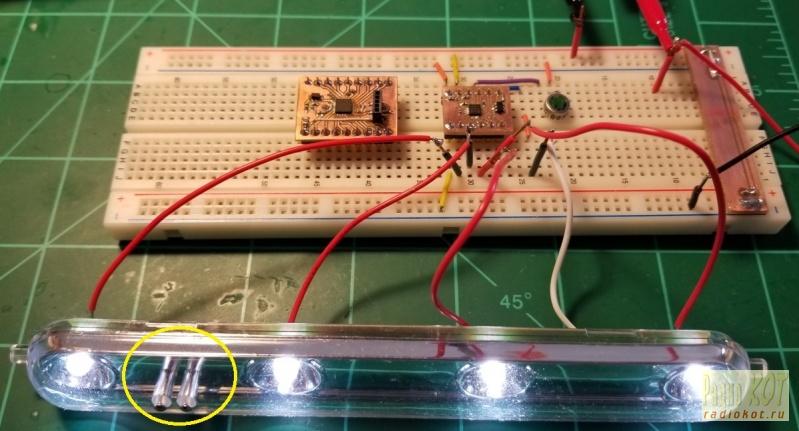
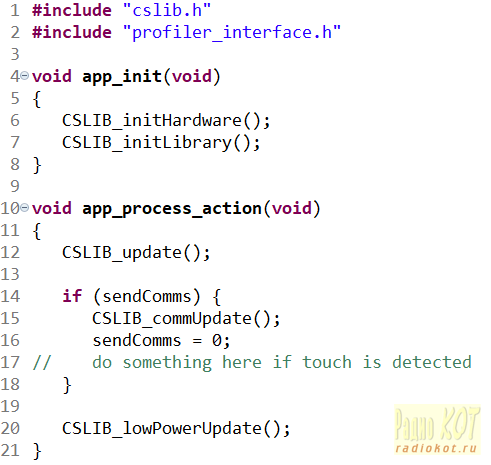
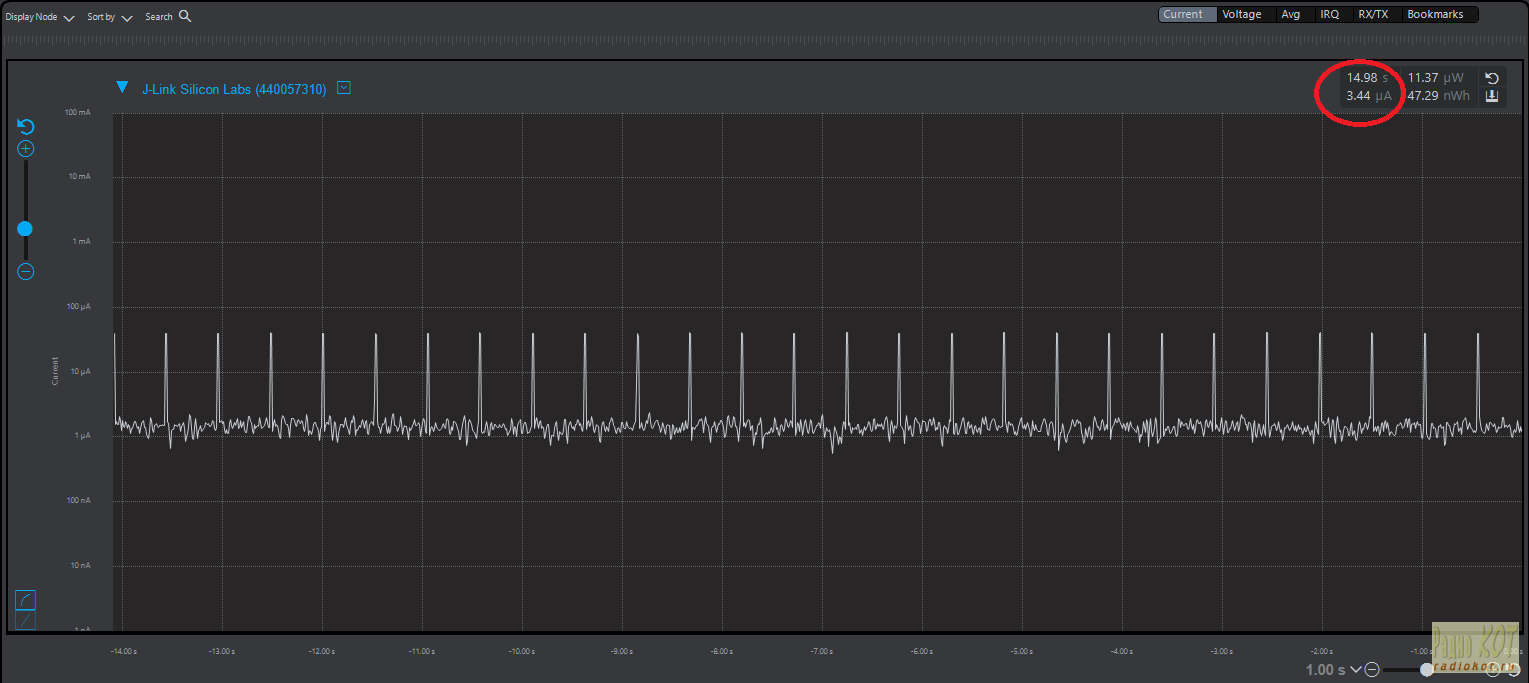
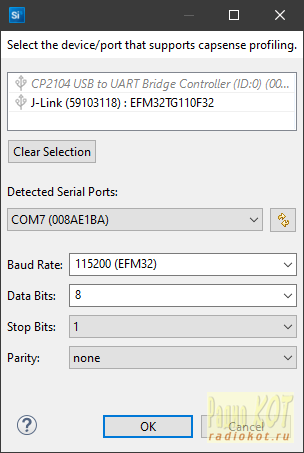
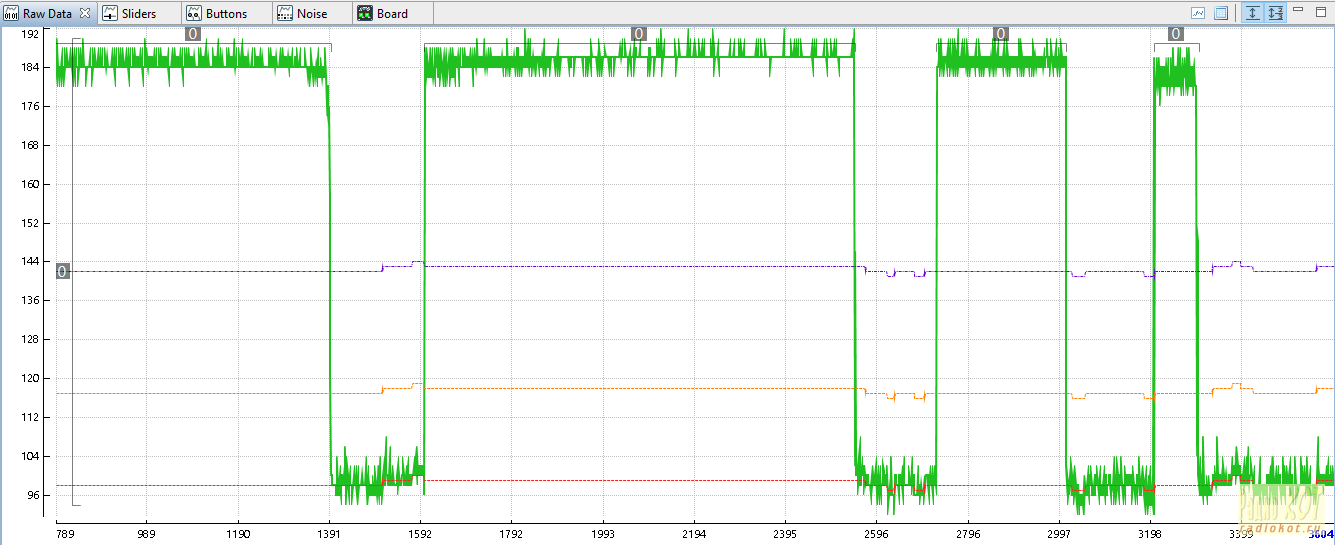
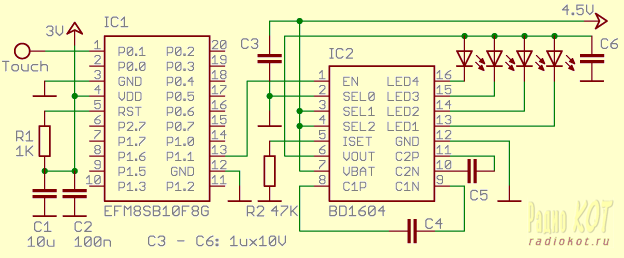
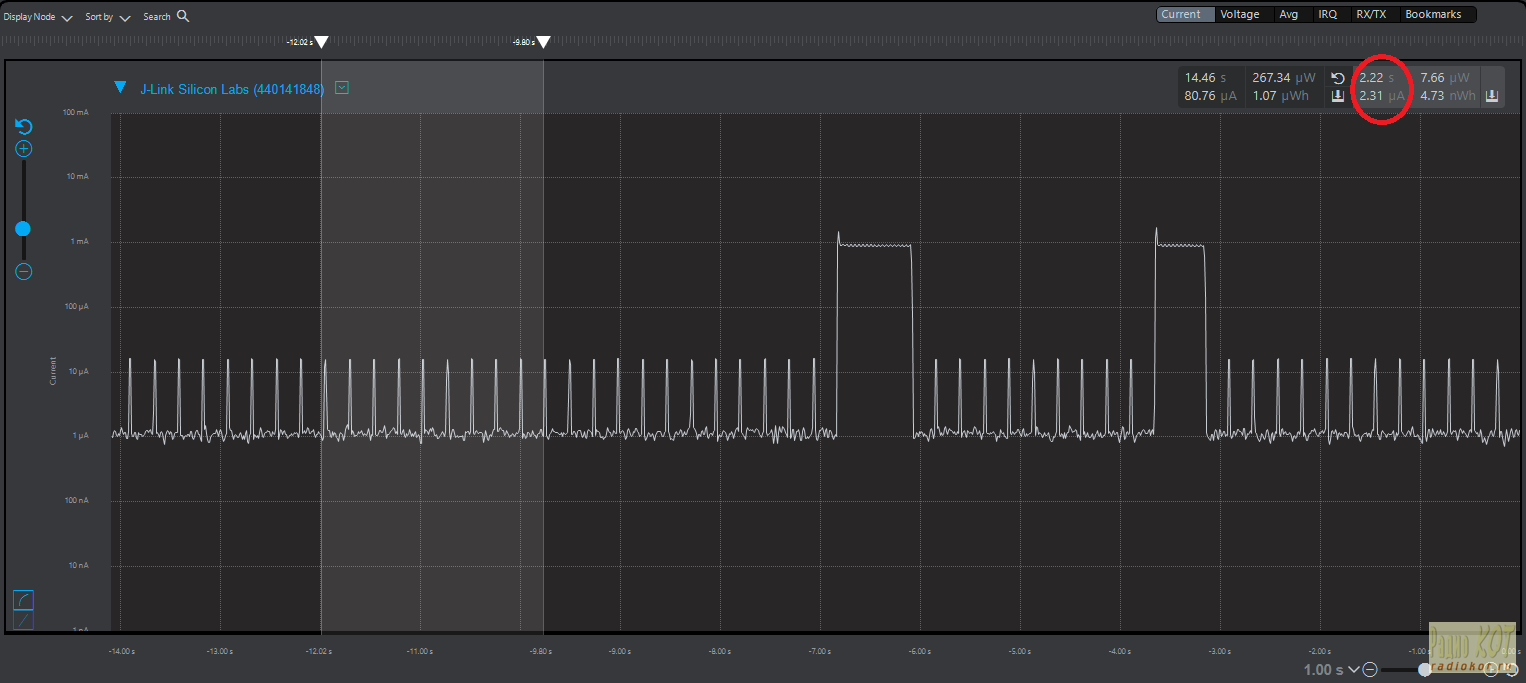
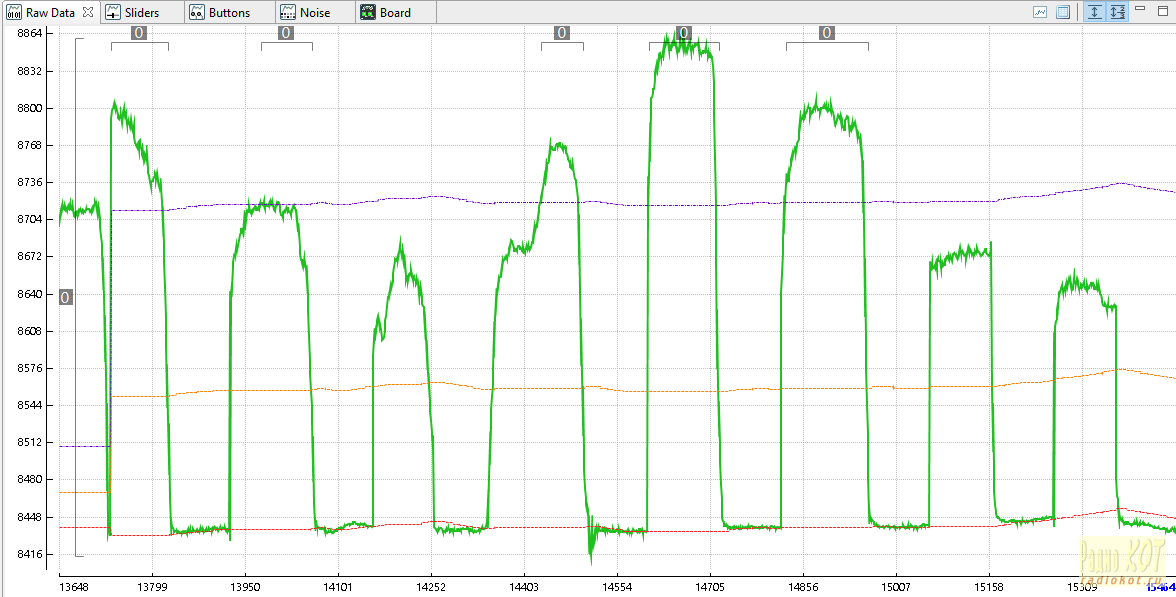
–ê–≤—Ç–æ—Ä: –°–µ—Ä–≥–µ–π –ë–µ–∑—Ä—É–∫–æ–≤ (aka Ser60) –≠—Ç–æ—Ç –ø—Ä–æ–µ–∫—Ç –≤–æ–∑–Ω–∏–∫ —Å–∫–æ—Ä–µ–µ –∏–∑-–∑–∞ –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ—Å—Ç–∏ –¥–æ—Ä–∞–±–æ—Ç–∞—Ç—å –ø—Ä–∏–æ–±—Ä–µ—Ç—ë–Ω–Ω—É—é –ø—Ä–æ–º—ã—à–ª–µ–Ω–Ω—É—é —Å–≤–µ—Ç–æ–¥–∏–æ–¥–Ω—É—é –ø–æ–¥—Å–≤–µ—Ç–∫—É, —É—Å—Ç–∞–Ω–æ–≤–ª–µ–Ω–Ω—É—é –≤ –Ω–µ–±–æ–ª—å—à–æ–º –Ω–∞—Å—Ç–µ–Ω–Ω–æ–º —à–∫–∞—Ñ—É. –û–Ω–∞ –∏–¥–µ–∞–ª—å–Ω–æ –≤–ø–∏—Å—ã–≤–∞–ª–∞—Å—å –ø–æ —Ä–∞–∑–º–µ—Ä–∞–º –≤ —à–∫–∞—Ñ—á–∏–∫ –∏ –æ–±–µ—Å–ø–µ—á–∏–≤–∞–ª–∞ –¥–æ—Å—Ç–∞—Ç–æ—á–Ω—É—é —è—Ä–∫–æ—Å—Ç—å. –ö–∞–∂–¥–æ–µ –ø—Ä–∏–∫–æ—Å–Ω–æ–≤–µ–Ω–∏–µ –∫ –∫–æ–Ω—Ç–∞–∫—Ç–Ω–æ–º—É —Å–µ–Ω—Å–æ—Ä—É –∏–∑–º–µ–Ω—è–µ—Ç —Å–æ—Å—Ç–æ—è–Ω–∏–µ –ø–æ–¥—Å–≤–µ—Ç–∫–∏ –≤–∫–ª—é—á–µ–Ω–∞/–≤—ã–∫–ª—é—á–µ–Ω–∞. –ü–æ–¥—Å–≤–µ—Ç–∫–∞ –ø–∏—Ç–∞–µ—Ç—Å—è –æ—Ç 3—Ö–ê–ê–ê –±–∞—Ç–∞—Ä–µ–µ–∫, –∏ –∫—Ä–∞—Å–∏–≤–æ –ø–æ–¥–≤–µ—Å—Ç–∏ —Å–µ—Ç–µ–≤–æ–µ –ø–∏—Ç–∞–Ω–∏–µ –∫ —à–∫–∞—Ñ—á–∏–∫—É –±–µ–∑ —Å–≤–∏—Å–∞—é—â–∏—Ö –ø—Ä–æ–≤–æ–¥–æ–≤ –∏–ª–∏ –¥–æ–ª–±–ª–µ–Ω–∏—è —Å—Ç–µ–Ω –Ω–µ–≤–æ–∑–º–æ–∂–Ω–æ. –ö–æ—Ä–æ—á–µ, –≤—Å—ë –±—ã–ª–æ —Ö–æ—Ä–æ—à–æ –¥–æ —Ç–µ—Ö –ø–æ—Ä, –ø–æ–∫–∞, —É–¥–∏–≤–∏–≤—à–∏—Å—å –∫–æ—Ä–æ—Ç–∫–æ–º—É —Å—Ä–æ–∫—É —Å–ª—É–∂–±—ã –±–∞—Ç–∞—Ä–µ–π, —è –Ω–µ –æ—Ç–∫—Ä—ã–ª –ø–æ–¥—Å–≤–µ—Ç–∫—É –¥–ª—è –∏—Å—Å–ª–µ–¥–æ–≤–∞–Ω–∏—è –ø—Ä–∏—á–∏–Ω—ã. –ò–∑–º–µ—Ä–µ–Ω–Ω–æ–µ —Ç–æ–∫–æ–ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ –≤ —Ä–µ–∂–∏–º–µ –æ–∂–∏–¥–∞–Ω–∏—è –∫–∞—Å–∞–Ω–∏—è —Å–µ–Ω—Å–æ—Ä–∞ –æ–∫–∞–∑–∞–ª–æ—Å—å 40 –º–∫–ê, –∞ –ø—Ä–∏ —Ä–∞–±–æ—Ç–µ –ø–æ–¥—Å–≤–µ—Ç–∫–∏ –≤–æ–∑—Ä–∞—Å—Ç–∞–ª–æ –¥–æ 120 –º–ê. –ß–µ—Ç—ã—Ä–µ –ø–∞—Ä–∞–ª–ª–µ–ª—å–Ω–æ —Å–æ–µ–¥–∏–Ω—ë–Ω–Ω—ã—Ö —Å–≤–µ—Ç–æ–¥–∏–æ–¥–∞ –ø–æ–¥—Å–≤–µ—Ç–∫–∏ –ø–æ–¥–∫–ª—é—á–∞–ª–∏—Å—å —Ç—Ä–∞–Ω–∑–∏—Å—Ç–æ—Ä–Ω—ã–º –∫–ª—é—á–æ–º Q1 (–≤ –∫—Ä–∞—Å–Ω–æ–º –∫—Ä—É–∂–∫–µ) –Ω–∞–ø—Ä—è–º—É—é –∫ –±–∞—Ç–∞—Ä–µ–µ –±–µ–∑ –≤—Å—è–∫–∏—Ö –æ–≥—Ä–∞–Ω–∏—á–∏—Ç–µ–ª—å–Ω—ã—Ö —Ä–µ–∑–∏—Å—Ç–æ—Ä–æ–≤(?!) –ù–∞ –∫–æ—Ä–ø—É—Å–µ 8-–Ω–æ–≥–æ–π –º–∏–∫—Ä–æ—Å—Ö–µ–º—ã –Ω–∞ –ø–ª–∞—Ç–µ –Ω–µ –∏–º–µ–µ—Ç—Å—è –Ω–∏–∫–∞–∫–∏—Ö –æ–ø–æ–∑–Ω–∞–≤–∞—Ç–µ–ª—å–Ω—ã—Ö —Å–∏–º–≤–æ–ª–æ–≤. –°—Ä–æ–∫ —Å–ª—É–∂–±—ã –±–∞—Ç–∞—Ä–µ–π, –≤–æ–∑–º–æ–∂–Ω–æ, –±—ã–ª –±—ã –ø—Ä–∏–µ–º–ª–µ–º—ã–º, –µ—Å–ª–∏ –±—ã –º—ã —á–∞—Å—Ç–æ –Ω–µ –∑–∞–±—ã–≤–∞–ª–∏ –æ—Ç–∫–ª—é—á–∞—Ç—å –ø–æ–¥—Å–≤–µ—Ç–∫—É –ø—Ä–∏ –∑–∞–∫—Ä—ã–≤–∞–Ω–∏–∏ —à–∫–∞—Ñ—á–∏–∫–∞. –¢–∞–∫–∏–º –æ–±—Ä–∞–∑–æ–º, –≤–æ–∑–Ω–∏–∫–ª–∞ –∏–¥–µ—è –¥–æ—Ä–∞–±–æ—Ç–∫–∏ –ø–æ–¥—Å–≤–µ—Ç–∫–∏ –≤ —Ü–µ–ª—è—Ö —Å–Ω–∏–∂–µ–Ω–∏—è –ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏—è –≤ –æ–±–æ–∏—Ö —Ä–µ–∂–∏–º–∞—Ö –∏ –¥–æ–±–∞–≤–ª–µ–Ω–∏—è –∫ —Ñ—É–Ω–∫—Ü–∏–æ–Ω–∞–ª—É –∞–≤—Ç–æ–æ—Ç–∫–ª—é—á–µ–Ω–∏—è –ø–æ—Å–ª–µ –º–∏–Ω—É—Ç—ã —Ä–∞–±–æ—Ç—ã. –î–æ—Ä–∞–±–æ—Ç–∫–∞ –Ω–∞—á–∞–ª–∞—Å—å —Å –≤–≤–µ–¥–µ–Ω–∏—è –≤ —Å—Ö–µ–º—É –Ω–æ—Ä–º–∞–ª—å–Ω–æ–≥–æ –¥—Ä–∞–π–≤–µ—Ä–∞ —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–≤ BD1604. –û–Ω –º–æ–∂–µ—Ç –æ–±—Å–ª—É–∂–∏–≤–∞—Ç—å –¥–æ 4 —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–≤ –∏ –∏–º–µ–µ—Ç –≤—Å—Ç—Ä–æ–µ–Ω–Ω—ã–π –±—É—Å—Ç–µ—Ä –¥–ª—è —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏–∏ —Ç–æ–∫–∞ —á–µ—Ä–µ–∑ –Ω–∏—Ö –≤ –ø—Ä–æ—Ü–µ—Å—Å–µ —Ä–∞–∑—Ä—è–¥–∞ –±–∞—Ç–∞—Ä–µ–π. –û–∫–∞–∑–∞–ª–æ—Å—å, —á—Ç–æ —Ç–æ–∫–∞ –≤ 10 –º–ê —á–µ—Ä–µ–∑ –∫–∞–∂–¥—ã–π —Å–≤–µ—Ç–æ–¥–∏–æ–¥ –≤–ø–æ–ª–Ω–µ –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ –¥–ª—è –ø–æ–ª—É—á–µ–Ω–∏—è –Ω–∞ –≥–ª–∞–∑ –ø—Ä–∏–º–µ—Ä–Ω–æ —Ç–∞–∫–æ–π –∂–µ –∫–∞–∫ —Ä–∞–Ω–µ–µ —è—Ä–∫–æ—Å—Ç–∏. –¢–æ–∫ —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–≤ –æ–ø—Ä–µ–¥–µ–ª—è–µ—Ç—Å—è —Ä–µ–∑–∏—Å—Ç–æ—Ä–æ–º R1. –ò–∑–º–µ—Ä–µ–Ω–Ω–æ–µ —Å–æ–±—Å—Ç–≤–µ–Ω–Ω–æ–µ –ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ –¥—Ä–∞–π–≤–µ—Ä–∞ –ø—Ä–∏ –Ω–µ—Ä–∞–±–æ—Ç–∞—é—â–∏—Ö —Å–≤–µ—Ç–æ–¥–∏–æ–¥–∞—Ö –Ω–µ –ø—Ä–µ–≤—ã—à–∞–µ—Ç 3 –º–∫–ê. –í –ø–µ—Ä–≤–æ–π –≤–µ—Ä—Å–∏–∏ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞ –¥–ª—è —Ä–∞–±–æ—Ç—ã —Å —Å–µ–Ω—Å–æ—Ä–Ω–æ–π –ø–ª–æ—â–∞–¥–∫–æ–π –Ω–∞ –ø–ª–∞—Ç–µ —è –ø–æ–ø—Ä–æ–±–æ–≤–∞–ª –ø—Ä–∏–º–µ–Ω–∏—Ç—å –∏–∑–≤–µ—Å—Ç–Ω—É—é –º–∏–∫—Ä–æ—Å—Ö–µ–º—É TTP223. –ü–æ–¥–∞—á–∞ –Ω–∞ –≤—ã–≤–æ–¥ 6 –º–∏–∫—Ä–æ—Å—Ö–µ–º—ã IC1 –Ω–∞–ø—Ä—è–∂–µ–Ω–∏—è –ø–∏—Ç–∞–Ω–∏—è –ø–µ—Ä–µ–≤–æ–¥–∏—Ç –µ—ë –≤ —Ç—Ä–∏–≥–≥–µ—Ä–Ω—ã–π —Ä–µ–∂–∏–º —Ä–∞–±–æ—Ç—ã, –ø—Ä–∏ –∫–æ—Ç–æ—Ä–æ–º —Å–æ—Å—Ç–æ—è–Ω–∏–µ –≤—ã–≤–æ–¥–∞ 1 –∏–∑–º–µ–Ω—è–µ—Ç—Å—è –ø—Ä–∏ –∫–∞–∂–¥–æ–º –∫–∞—Å–∞–Ω–∏–∏ —Å–µ–Ω—Å–æ—Ä–∞ –∏ –æ—Å—Ç–∞—ë—Ç—Å—è –Ω–µ–∏–∑–º–µ–Ω–Ω—ã–º –¥–æ —Å–ª–µ–¥—É—é—â–µ–≥–æ –∫–∞—Å–∞–Ω–∏—è. –ù–µ—Å–º–æ—Ç—Ä—è –Ω–∞ –∑–∞–≤–µ—Ä–µ–Ω–∏—è –ø–∞—Ä–∞–º–µ—Ç—Ä–æ–≤ TTP223 –≤ –µ—ë –î–®, —Å–æ–±—Å—Ç–≤–µ–Ω–Ω–æ–µ –ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ –∏–º–µ—é—â–∏—Ö—Å—è —É –º–µ–Ω—è –¥–≤—É—Ö –µ—ë —ç–∫–∑–µ–º–ø–ª—è—Ä–æ–≤ –æ–∫–∞–∑–∞–ª–æ—Å—å –≤ —Ä–∞–π–æ–Ω–µ 4–5 –º–∫–ê, —Ç.–µ. –∫–∞–∫ –º–∏–Ω–∏–º—É–º –≤ 3 —Ä–∞–∑–∞ –±–æ–ª—å—à–µ. –°—Ö–µ–º–∞ –±—ã–ª–∞ –ø—Ä–æ—Ç–µ—Å—Ç–∏—Ä–æ–≤–∞–Ω–∞ –Ω–∞ –º–æ–Ω—Ç–∞–∂–Ω–æ–π –ø–ª–∞—Ç–µ. –ü—Ä–æ—à—É –Ω–µ –æ–±—Ä–∞—â–∞—Ç—å –≤–Ω–∏–º–∞–Ω–∏—è –Ω–∞ —Å–ª—É—á–∞–π–Ω–æ –æ–∫–∞–∑–∞–≤—à—É—é—Å—è –Ω–∞ –º–∞–∫–µ—Ç–∫–µ –Ω–µ–ø–æ–¥–∫–ª—é—á–µ–Ω–Ω—É—é –ø–ª–∞—Ç—É —Å–ª–µ–≤–∞. –¢–∞–∫–∏–º –æ–±—Ä–∞–∑–æ–º, —É–¥–∞–ª–æ—Å—å –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ –ø—Ä–æ—Å—Ç–æ –≤—ã–ø–æ–ª–Ω–∏—Ç—å –ø–µ—Ä–≤—É—é —á–∞—Å—Ç—å –ø—Ä–æ–≥—Ä–∞–º–º—ã, —Å–≤—è–∑–∞–Ω–Ω—É—é —Å–æ –∑–Ω–∞—á–∏—Ç–µ–ª—å–Ω—ã–º —Å–Ω–∏–∂–µ–Ω–∏–µ–º —Ç–æ–∫–æ–ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏—è —Å–æ 120 –º–ê –¥–æ 40 –º–ê –ø—Ä–∏ —Ä–∞–±–æ—Ç–µ –ø–æ–¥—Å–≤–µ—Ç–∫–∏ –∏ —Å 40 –º–∫–ê –¥–æ 8 –º–∫–ê –≤ —Ä–µ–∂–∏–º–µ –æ–∂–∏–¥–∞–Ω–∏—è –∫–∞—Å–∞–Ω–∏—è. –î–ª—è –æ—Ä–≥–∞–Ω–∏–∑–∞—Ü–∏–∏ –∞–≤—Ç–æ–æ—Ç–∫–ª—é—á–µ–Ω–∏—è –ø—Ä–∏ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏–∏ TTP223 –≤ —Ç—Ä–∏–≥–≥–µ—Ä–Ω–æ–º —Ä–µ–∂–∏–º–µ, –µ–¥–∏–Ω—Å—Ç–≤–µ–Ω–Ω—ã–º –∏–∑–≤–µ—Å—Ç–Ω—ã–º –º–Ω–µ —Å–ø–æ—Å–æ–±–æ–º –≤–µ—Ä–Ω—É—Ç—å –µ—ë –≤ –∏—Å—Ö–æ–¥–Ω–æ–µ —Å–æ—Å—Ç–æ—è–Ω–∏–µ —è–≤–ª—è–µ—Ç—Å—è –∫—Ä–∞—Ç–∫–æ–≤—Ä–µ–º–µ–Ω–Ω–æ–µ –æ—Ç–∫–ª—é—á–µ–Ω–∏–µ –µ—ë –ø–∏—Ç–∞–Ω–∏—è. –û–¥–Ω–∞–∫–æ, –ø—Ä–∏ –ø–æ–¥–∫–ª—é—á–µ–Ω–∏–∏ –≤—ã–≤–æ–¥–∞ 6 –Ω–∞ –∑–µ–º–ª—é —Å–∏–≥–Ω–∞–ª –ª–æ–≥. 1 –Ω–∞ –µ—ë –≤—ã—Ö–æ–¥–µ –±—É–¥–µ—Ç –ø—Ä–∏—Å—É—Ç—Å—Ç–≤–æ–≤–∞—Ç—å —Ç–æ–ª—å–∫–æ –≤–æ –≤—Ä–µ–º—è –∫–∞—Å–∞–Ω–∏—è —Å–µ–Ω—Å–æ—Ä–∞. –í –ª—é–±–æ–º —Å–ª—É—á–∞–µ –≤—Å—Ç–∞–ª –≤–æ–ø—Ä–æ—Å –æ —Ç–æ–º, –∫–∞–∫ –æ—Ä–≥–∞–Ω–∏–∑–æ–≤–∞—Ç—å –∑–∞–¥–µ—Ä–∂–∫—É –≤—ã–∫–ª—é—á–µ–Ω–∏—è –Ω–∞ 1 –º–∏–Ω—É—Ç—É. –°—Ä–∞–∑—É –æ–ø—Ä–µ–¥–µ–ª—é—Å—å, —á—Ç–æ —Ä–µ–∞–ª–∏–∑–∞—Ü–∏—è –∑–∞–¥–µ—Ä–∂–∫–∏ –Ω–∞ –¥–∏—Å–∫—Ä–µ—Ç–Ω—ã—Ö —Ç—Ä–∞–Ω–∑–∏—Å—Ç–æ—Ä–∞—Ö/–∫–æ–Ω–¥–µ–Ω—Å–∞—Ç–æ—Ä–∞—Ö, —Ç–∞–∫–∂–µ, –∫–∞–∫ –∏ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏–µ –¥–ª—è —ç—Ç–æ–≥–æ –∫–ª–∞—Å—Å–∏—á–µ—Å–∫–∏—Ö –º–∏–∫—Ä–æ—Å—Ö–µ–º –¥–∏—Å–∫—Ä–µ—Ç–Ω–æ–π –ª–æ–≥–∏–∫–∏, –º–Ω–µ –Ω–µ–∏–Ω—Ç–µ—Ä–µ—Å–Ω–∞ –∏ –≤ –∫–∞–∂–¥–æ–º —Å–≤–æ—ë–º –ø—Ä–æ–µ–∫—Ç–µ —è —Å—Ç—Ä–µ–º–ª—é—Å—å —É–∑–Ω–∞—Ç—å –∏ –ø–æ–ø—Ä–æ–±–æ–≤–∞—Ç—å —á—Ç–æ-—Ç–æ –¥–ª—è —Å–µ–±—è –Ω–æ–≤–æ–µ. –í—ã–±–æ—Ä –ø–∞–ª –Ω–∞ –º–∏–∫—Ä–æ—Å—Ö–µ–º—É –∞–Ω–∞–ª–æ–≥–æ-—Ü–∏—Ñ—Ä–æ–≤–æ–≥–æ —Ç–∞–π–º–µ—Ä–∞ TLP5111. –≠—Ç–æ—Ç —Ç–∞–π–º–µ—Ä –º–æ–∂–µ—Ç —Ä–∞–±–æ—Ç–∞—Ç—å –≤ –Ω–µ—Å–∫–æ–ª—å–∫–∏—Ö —Ä–µ–∂–∏–º–∞—Ö –∏ –ø—Ä–∏ –ø–æ–∫–∞–∑–∞–Ω–Ω–æ–π –Ω–∞ —Å—Ö–µ–º–µ –∫–æ–Ω—Ñ–∏–≥—É—Ä–∞—Ü–∏–∏ –µ–≥–æ –≤—ã–≤–æ–¥–æ–≤ –Ω–∞—á–∏–Ω–∞–µ—Ç –æ—Ç—Å—á–µ—Ç –≤—Ä–µ–º–µ–Ω–∏ –ø–æ—Å–ª–µ –∫—Ä–∞—Ç–∫–æ–≤—Ä–µ–º–µ–Ω–Ω–æ–≥–æ –∑–∞–º—ã–∫–∞–Ω–∏—è –≤—Ö–æ–¥–∞ DEL –Ω–∞ “+” –ø–∏—Ç–∞–Ω–∏—è —Ç—Ä–∞–Ω–∑–∏—Å—Ç–æ—Ä–æ–º VT2. –ü—Ä–∏ —ç—Ç–æ–º –Ω–∞ –≤—ã–≤–æ–¥–µ 5 —Ñ–æ—Ä–º–∏—Ä—É–µ—Ç—Å—è —Å–∏–≥–Ω–∞–ª –ª–æ–≥–∏—á–µ—Å–∫–æ–π –µ–¥–∏–Ω–∏—Ü—ã, –≤–∫–ª—é—á–∞—é—â–∏–π –¥—Ä–∞–π–≤–µ—Ä —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–≤. –ü–æ –∏—Å—Ç–µ—á–µ–Ω–∏–∏ –≤—Ä–µ–º–µ–Ω–Ω–æ–≥–æ –∏–Ω—Ç–µ—Ä–≤–∞–ª–∞, –æ–ø—Ä–µ–¥–µ–ª—è–µ–º–æ–≥–æ –Ω–æ–º–∏–Ω–∞–ª–æ–º —Ä–µ–∑–∏—Å—Ç–æ—Ä–∞ R2, –≤—ã—Ö–æ–¥ —Ç–∞–π–º–µ—Ä–∞ –≤–æ–∑–≤—Ä–∞—â–∞–µ—Ç—Å—è –≤ –∏—Å—Ö–æ–¥–Ω–æ–µ —Å–æ—Å—Ç–æ—è–Ω–∏–µ –∏ —Å–≤–µ—Ç–æ–¥–∏–æ–¥—ã –≤—ã–∫–ª—é—á–∞—é—Ç—Å—è. –°—Ö–µ–º—É –º–æ–∂–Ω–æ —É–ø—Ä–æ—Å—Ç–∏—Ç—å, –∏—Å–∫–ª—é—á–∏–≤ —Ç—Ä–∞–Ω–∑–∏—Å—Ç–æ—Ä VT1 —Å —Ä–µ–∑–∏—Å—Ç–æ—Ä–æ–º R3 –∏ —Å–æ–µ–¥–∏–Ω–∏–≤ –±–∞–∑—É VT2 —Å —Ä–µ–∑–∏—Å—Ç–æ—Ä–æ–º R4. –ü—Ä–∏ —ç—Ç–æ–º —Å–ª–µ–¥—É–µ—Ç –ø–æ–¥–∞—Ç—å –Ω–∞ –≤—ã–≤–æ–¥ 4 –º–∏–∫—Ä–æ—Å—Ö–µ–º—ã IC1 –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ –ø–∏—Ç–∞–Ω–∏—è. –≠—Ç–æ –ø—Ä–∏–≤–µ–¥—ë—Ç –∫ –∏–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞–Ω–∏—é —Å–∏–≥–Ω–∞–ª–∞ –Ω–∞ –≤—ã—Ö–æ–¥–µ IC1 –∏ –ø–æ—è–≤–ª–µ–Ω–∏—é –ª–æ–≥. 0 –Ω–∞ –≤—ã–≤–æ–¥–µ 1 —Ç–æ–ª—å–∫–æ –Ω–∞ –∫–æ—Ä–æ—Ç–∫–æ–µ –≤—Ä–µ–º—è –∫–∞—Å–∞–Ω–∏—è —Å–µ–Ω—Å–æ—Ä–∞, —á—Ç–æ –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ –¥–ª—è –æ—Ç–∫—Ä—ã–≤–∞–Ω–∏—è VT2 –∏ –Ω–∞—á–∞–ª–∞ –æ—Ç—Å—á—ë—Ç–∞ –≤—Ä–µ–º–µ–Ω–Ω–æ–≥–æ –∏–Ω—Ç–µ—Ä–≤–∞–ª–∞ –º–∏–∫—Ä–æ—Å—Ö–µ–º–æ–π IC3. –°–æ–±—Å—Ç–≤–µ–Ω–Ω–æ–µ –ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ IC3 –Ω–∞—Ö–æ–¥–∏—Ç—Å—è –≤ —Å—É–±-–º–∏–∫—Ä–æ–∞–º–ø–µ—Ä–Ω–æ–º –¥–∏–∞–ø–∞–∑–æ–Ω–µ –∏ –Ω–µ –∏–¥—ë—Ç –Ω–∏ –≤ –∫–∞–∫–æ–µ —Å—Ä–∞–≤–Ω–µ–Ω–∏–µ —Å –∫–ª–∞—Å—Å–∏—á–µ—Å–∫–æ–π NE555 –¥–∞–∂–µ –≤ –ö–ú–û–ü –∏—Å–ø–æ–ª–Ω–µ–Ω–∏–∏. –ù–∞ —ç—Ç–æ–º –º–æ–∂–Ω–æ –±—ã–ª–æ –±—ã –∏ –æ—Å—Ç–∞–Ω–æ–≤–∏—Ç—å—Å—è, –Ω–æ —á—Ç–æ —ç—Ç–æ –∑–∞ –ø—Ä–æ–µ–∫—Ç –±–µ–∑ –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞? (–¥–∞ –ø—Ä–æ—Å—Ç—è—Ç –º–µ–Ω—è –∏—Ö –ø—Ä–æ—Ç–∏–≤–Ω–∏–∫–∏). –¢—É—Ç —è –≤—Å–ø–æ–º–Ω–∏–ª –ø—Ä–æ —Å–µ–º–∏–Ω–∞—Ä 6-–ª–µ—Ç–Ω–µ–π –¥–∞–≤–Ω–æ—Å—Ç–∏ —Ñ–∏—Ä–º—ã Cypress, –ø–æ—Å–≤—è—â—ë–Ω–Ω—ã–π –∏—Ö —Å–µ–Ω—Å–æ—Ä–Ω—ã–º –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è–º. –ï—â—ë —Ç–æ–≥–¥–∞ –º–µ–Ω—è –ø–æ—Ä–∞–∑–∏–ª–æ –∫–∞–∫ –≤—Å—ë –ø—Ä–æ—Å—Ç–æ –∏ –∞–≤—Ç–æ–º–∞—Ç–∏–∑–∏—Ä–æ–≤–∞–Ω–æ –≤ –ø–ª–∞–Ω–µ –Ω–∞—Å—Ç—Ä–æ–µ–∫ –¥–ª—è –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª—è. –û–¥–Ω–∞–∫–æ, –ø—Ä–∏ —Å–µ–≥–æ–¥–Ω—è—à–Ω–µ–º –¥–µ—Ñ–∏—Ü–∏—Ç–µ –∏–∑–¥–µ–ª–∏–π –º–∏–∫—Ä–æ—ç–ª–µ–∫—Ç—Ä–æ–Ω–∏–∫–∏ –ø—Ä–∏–æ–±—Ä–µ—Å—Ç–∏ PSoC —Ñ–∏—Ä–º—ã, –¥–∞ –µ—â—ë –≤ –Ω—É–∂–Ω–æ–º –∫–æ—Ä–ø—É—Å–µ, –º–Ω–µ –Ω–µ –ø—Ä–µ–¥—Å—Ç–∞–≤–∏–ª–æ—Å—å –≤–æ–∑–º–æ–∂–Ω—ã–º –∏ –ø—Ä–∏—à–ª–æ—Å—å –æ–±—Ö–æ–¥–∏—Ç—å—Å—è —Ç–µ–º, —á—Ç–æ –¥–æ—Å—Ç—É–ø–Ω–æ. –°–ª–µ–¥—É–µ—Ç –æ—Ç–º–µ—Ç–∏—Ç—å, —á—Ç–æ —Å–µ–≥–æ–¥–Ω—è –ø—Ä–∞–∫—Ç–∏—á–µ—Å–∫–∏ —É –≤—Å–µ—Ö –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç–µ–ª–µ–π –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–æ–≤ –∏–º–µ—é—Ç—Å—è —Ä–µ—à–µ–Ω–∏—è –¥–ª—è —Ä–∞–±–æ—Ç—ã —Å —Å–µ–Ω—Å–æ—Ä–Ω—ã–º–∏ –∫–Ω–æ–ø–∫–∞–º–∏. –ü–æ—Å–∫–æ–ª—å–∫—É —Å–µ–π—á–∞—Å —è –ø–ª–æ—Ç–Ω–æ —Ä–∞–±–æ—Ç–∞—é —Å –ú–ö –æ—Ç Silicon Labs, —Ä–µ—à–µ–Ω–æ –±—ã–ª–æ –∏–∑—É—á–∏—Ç—å —Ä–∞–±–æ—Ç—É —Å –∏—Ö –±–∏–±–ª–∏–æ—Ç–µ–∫–æ–π CSLIB. –í –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞—Ö —Ñ–∏—Ä–º—ã, –≤ –∑–∞–≤–∏—Å–∏–º–æ—Å—Ç–∏ –æ—Ç –º–æ–¥–µ–ª–∏, –∏–º–µ–µ—Ç—Å—è —Ç—Ä–∏ —Ç–∏–ø–∞ –∞–ø–ø–∞—Ä–∞—Ç–Ω—ã—Ö –º–æ–¥—É–ª–µ–π –¥–ª—è —Å–µ–Ω—Å–æ—Ä–Ω—ã—Ö –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–π: CSEN, LESENSE, –∏ ACMP (—Å–º. [1]). –ü–µ—Ä–≤—ã–π —Ç–∏–ø –ø—Ä–µ–¥–Ω–∞–∑–Ω–∞—á–µ–Ω –¥–ª—è –Ω–µ–ø–æ—Å—Ä–µ–¥—Å—Ç–≤–µ–Ω–Ω–æ–≥–æ –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞–Ω–∏—è —ë–º–∫–æ—Å—Ç–∏ –≤ —Ü–∏—Ñ—Ä–æ–≤–æ–π –∫–æ–¥. –Ø —É–∂–µ —Ä–∞—Å—Å–∫–∞–∑—ã–≤–∞–ª –∑–¥–µ—Å—å –ø—Ä–æ –ø–æ–¥–æ–±–Ω—ã–π –º–æ–¥—É–ª—å –≤ —Ä–∞–Ω–Ω–∏—Ö –ø—Ä–æ–µ–∫—Ç–∞—Ö –∏–∑–º–µ—Ä–∏—Ç–µ–ª–µ–π –≤–ª–∞–∂–Ω–æ—Å—Ç–∏ –Ω–∞ –æ—Å–Ω–æ–≤–µ —ë–º–∫–æ—Å—Ç–Ω—ã—Ö —Å–µ–Ω—Å–æ—Ä–æ–≤ (—Å–º, –Ω–∞–ø—Ä–∏–º–µ—Ä, [2]). –ú–æ–¥—É–ª—å LESENSE –ø—Ä–µ–¥—Å—Ç–∞–≤–ª—è–µ—Ç —Å–æ–±–æ–π —É–Ω–∏–≤–µ—Ä—Å–∞–ª—å–Ω—ã–π –º–æ–¥—É–ª—å –¥–ª—è —Ä–∞–±–æ—Ç—ã —Å —Ä–∞–∑–ª–∏—á–Ω—ã–º–∏ —Ç–∏–ø–∞–º–∏ —Å–µ–Ω—Å–æ—Ä–æ–≤ (—ë–º–∫–æ—Å—Ç–Ω—ã–µ, –∏–Ω–¥—É–∫—Ç–∏–≤–Ω—ã–µ, –∏ –ø—Ä.). –ù–∞–∫–æ–Ω–µ—Ü, ACMP – —ç—Ç–æ –ø—Ä–æ—Å—Ç–æ –∞–Ω–∞–ª–æ–≥–æ–≤—ã–π –∫–æ–º–ø–∞—Ä–∞—Ç–æ—Ä, –≤ —Ü–µ–ø—å –ø–æ–ª–æ–∂–∏—Ç–µ–ª—å–Ω–æ–π –æ–±—Ä–∞—Ç–Ω–æ–π —Å–≤—è–∑–∏ –∫–æ—Ç–æ—Ä–æ–≥–æ –≤–∫–ª—é—á—ë–Ω –æ–¥–∏–Ω –∏–∑ –∏–º–µ—é—â–∏—Ö—Å—è –Ω–∞ –±–æ—Ä—Ç—É –ú–ö —Ä–µ–∑–∏—Å—Ç–æ—Ä–æ–≤, —á—Ç–æ –≤ —Å–æ–≤–æ–∫—É–ø–Ω–æ—Å—Ç–∏ —Å —ë–º–∫–æ—Å—Ç—å—é —Å–µ–Ω—Å–æ—Ä–Ω–æ–π –∫–æ–Ω—Ç–∞–∫—Ç–Ω–æ–π –ø–ª–æ—â–∞–¥–∫–∏ –ø—Ä–µ–≤—Ä–∞—â–∞–µ—Ç –∫–æ–º–ø–∞—Ä–∞—Ç–æ—Ä –≤ —Ä–µ–ª–∞–∫—Å–∞—Ü–∏–æ–Ω–Ω—ã–π –≥–µ–Ω–µ—Ä–∞—Ç–æ—Ä. –ß–∞—Å—Ç–æ—Ç–∞ –≥–µ–Ω–µ—Ä–∞—Ç–æ—Ä–∞ –∏–∑–º–µ–Ω—è–µ—Ç—Å—è –ø—Ä–∏ –ø—Ä–∏–∫–æ—Å–Ω–æ–≤–µ–Ω–∏–∏ –ø–∞–ª—å—Ü–µ–º –∫ –∫–æ–Ω—Ç–∞–∫—Ç–Ω–æ–π –ø–ª–æ—â–∞–¥–∫–µ, —á—Ç–æ –∏ –æ—Ç—Å–ª–µ–∂–∏–≤–∞–µ—Ç—Å—è –∞–ø–ø–∞—Ä–∞—Ç–Ω–æ –∏ –ø—Ä–æ–≥—Ä–∞–º–º–Ω–æ. –ë–ª–∞–≥–æ–¥–∞—Ä—è —Ä–∞–∑–≤–∏—Ç–æ–π –∞–ø–ø–∞—Ä–∞—Ç–Ω–æ–π –ø–æ–¥–¥–µ—Ä–∂–∫–µ –ø–µ—Ä–∏–æ–¥–∏—á–µ—Å–∫–∏–µ –∏–∑–º–µ—Ä–µ–Ω–∏—è —ë–º–∫–æ—Å—Ç–∏ –º–æ–≥—É—Ç –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—å—Å—è –ø—Ä–∏ –ø–æ–≥—Ä—É–∂–µ–Ω–∏–∏ –ú–ö –≤ —Ä–µ–∂–∏–º –≥–ª—É–±–æ–∫–æ–≥–æ —Å–Ω–∞ –∏ –±–µ–∑ —É—á–∞—Å—Ç–∏—è –ø—Ä–æ—Ü–µ—Å—Å–æ—Ä–∞, —á—Ç–æ –ø–æ–∑–≤–æ–ª—è–µ—Ç —Å–Ω–∏–∑–∏—Ç—å –ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ –≤ —Ä–µ–∂–∏–º–µ –æ–∂–∏–¥–∞–Ω–∏—è –ø—Ä–∏–∫–æ—Å–Ω–æ–≤–µ–Ω–∏—è –¥–æ –µ–¥–∏–Ω–∏—Ü –º–∏–∫—Ä–æ–∞–º–ø–µ—Ä. –ë–∏–±–ª–∏–æ—Ç–µ–∫–∞ CSLIB –ø–æ—Å—Ç–∞–≤–ª—è–µ—Ç—Å—è –∫–∞–∫ –∫–æ–º–±–∏–Ω–∞—Ü–∏—è –æ—Ç–∫—Ä—ã—Ç–æ–≥–æ –∫–æ–¥–∞ –¥–ª—è –Ω–∞—Å—Ç—Ä–æ–π–∫–∏ –∞–ø–ø–∞—Ä–∞—Ç–Ω–æ–π —á–∞—Å—Ç–∏ –∏ –ø—Ä–µ-–∫–æ–º–ø–∏–ª–∏—Ä–æ–≤–∞–Ω–Ω–æ–≥–æ –ø—Ä–æ–≥—Ä–∞–º–º–Ω–æ–≥–æ –º–æ–¥—É–ª—è –≤ –∑–∞–≤–∏—Å–∏–º–æ—Å—Ç–∏ –æ—Ç –∏–º–µ—é—â–∏—Ö—Å—è –∞–ø–ø–∞—Ä–∞—Ç–Ω—ã—Ö –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç–µ–π –º–æ–¥–µ–ª–∏ –ú–ö. –í —Ç–∞–±–ª–∏—Ü–µ –Ω–∏–∂–µ –ø—Ä–∏–≤–µ–¥–µ–Ω—ã —Ç–∏–ø—ã –∞–ø–ø–∞—Ä–∞—Ç–Ω—ã—Ö –º–æ–¥—É–ª–µ–π –º–æ–¥–µ–ª–µ–π –ú–ö, —É—Å—Ç–∞–Ω–æ–≤–ª–µ–Ω–Ω—ã—Ö –Ω–∞ –Ω–µ–∫–æ—Ç–æ—Ä—ã—Ö –æ—Ç–ª–∞–¥–æ—á–Ω—ã—Ö –ø–ª–∞—Ç–∞—Ö —Ñ–∏—Ä–º—ã. –ö —Å–æ–∂–∞–ª–µ–Ω–∏—é, –ø–æ –Ω–µ–∏–∑–≤–µ—Å—Ç–Ω–æ–π –º–Ω–µ –ø—Ä–∏—á–∏–Ω–µ –≤ –ø–æ—Å–ª–µ–¥–Ω–µ–π –≤–µ—Ä—Å–∏–∏ Simplicity Studio IDE v5 –Ω–∞ –º–æ–º–µ–Ω—Ç –Ω–∞–ø–∏—Å–∞–Ω–∏—è –æ—Ç—Å—É—Ç—Å—Ç–≤—É—é—Ç –ø—Ä–∏–º–µ—Ä—ã –ø—Ä–æ–µ–∫—Ç–æ–≤ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏—è –±–∏–±–ª–∏–æ—Ç–µ–∫–∏ CSLIB –¥–ª—è ARM –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–æ–≤ —Ñ–∏—Ä–º—ã. –û–¥–Ω–∞–∫–æ, –æ–Ω–∏ –∏–º–µ—é—Ç—Å—è –≤ –≤–µ—Ä—Å–∏–∏ v4, —Ö–æ—Ç—è –∏ –Ω–µ —Å–æ–≤–º–µ—Å—Ç–∏–º—ã —Å –≤–µ—Ä—Å–∏–µ–π v5. –ü–æ—ç—Ç–æ–º—É —è —Ä–µ—à–∏–ª –ø–æ–ø—Ä–æ–±–æ–≤–∞—Ç—å —Å–æ–∑–¥–∞—Ç—å —Ç–∞–∫–æ–π –ø—Ä–æ–µ–∫—Ç –≤ –∞–∫—Ç—É–∞–ª—å–Ω–æ–π –Ω–∞ —Å–µ–≥–æ–¥–Ω—è –≤–µ—Ä—Å–∏–∏ Studio —Å –Ω—É–ª—è –¥–ª—è –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞ «—Ç–∏–Ω—å–∫–∏» EFM32TG110F32 —Å–µ–º–µ–π—Å—Ç–≤–∞ Tiny Gecko —Å –∞—Ä—Ö–∏—Ç–µ–∫—Ç—É—Ä–æ–π ARM-CM3, —É—Å—Ç–∞–Ω–æ–≤–ª–µ–Ω–Ω—ã–º –Ω–∞ —Å–∞–º–æ–¥–µ–ª—å–Ω–æ–π –º–∞–∫–µ—Ç–Ω–æ–π –ø–ª–∞—Ç–µ. –î–ª—è —ç—Ç–æ–≥–æ –Ω—É–∂–Ω–æ –ø—Ä–æ—Å—Ç–æ –ø–æ–¥–∫–ª—é—á–∏—Ç—å –≤ –∫–æ–Ω—Ñ–∏–≥—É—Ä–∞—Ç–æ—Ä–µ –ø—Ä–æ–µ–∫—Ç–∞ –±–∏–±–ª–∏–æ—Ç–µ–∫—É CSLIB (–Ω–∞—Ö–æ–¥—è—â—É—é—Å—è –≤ –∫–∞—Ç–µ–≥–æ—Ä–∏–∏ Platform → Middleware) –∏ —Ç–∞–º –∂–µ –Ω–∞—Å—Ç—Ä–æ–∏—Ç—å –≤—Ä–µ–º–µ–Ω–Ω—ã–µ –ø–∞—Ä–∞–º–µ—Ç—Ä—ã —Å–∫–∞–Ω–∏—Ä–æ–≤–∞–Ω–∏—è —Å–µ–Ω—Å–æ—Ä–æ–≤ –≤ –∞–∫—Ç–∏–≤–Ω–æ–º (—Ç.–µ. –ø–æ—Å–ª–µ –¥–µ—Ç–µ–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏—è –ø—Ä–∏–∫–æ—Å–Ω–æ–≤–µ–Ω–∏—è) –∏ –ø–∞—Å—Å–∏–≤–Ω–æ–≥–æ (–ø—Ä–∏ –æ–∂–∏–¥–∞–Ω–∏–∏ –ø—Ä–∏–∫–æ—Å–Ω–æ–≤–µ–Ω–∏—è) —Ä–µ–∂–∏–º–∞—Ö. –í –ø—Ä–∏—Å–æ–µ–¥–∏–Ω—ë–Ω–Ω–æ–º –≤ —Ä–µ–∑—É–ª—å—Ç–∞—Ç–µ —ç—Ç–æ–≥–æ –¥–µ–π—Å—Ç–≤–∏—è –∫ –ø—Ä–æ–µ–∫—Ç—É —Ñ–∞–π–ª–µ cslib_hwconfig.h —Å–ª–µ–¥—É–µ—Ç —É–∫–∞–∑–∞—Ç—å —á–∏—Å–ª–æ —Å–µ–Ω—Å–æ—Ä–æ–≤ –∏ –∑–∞–¥–µ–π—Å—Ç–≤–æ–≤–∞–Ω–Ω—ã–µ –≤—ã–≤–æ–¥—ã ACMP –ø–æ–¥ –Ω–∏—Ö –≤ –¥–µ—Ñ–∞–π–Ω–∞—Ö DEF_NUM_SENSORS, MUX_VALUE_ARRAY, –∏ CSLIB_MUX_INPUT. –ú–∏–Ω–∏–º–∞–ª—å–Ω—ã–π –∫–æ–¥ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è –ø–æ–ª—É—á–∞–µ—Ç—Å—è –∏–∑ —Å–µ—Ä–∏–∏ –∫–æ—Ä–æ—á–µ –Ω–µ –±—ã–≤–∞–µ—Ç. –í —Ñ—É–Ω–∫—Ü–∏–∏ app_init() –≤—ã–∑—ã–≤–∞—é—Ç—Å—è –¥–≤–µ API –∏–Ω–∏—Ü–∏–∞–ª–∏–∑–∞—Ü–∏–∏ –±–∏–±–ª–∏–æ—Ç–µ–∫–∏. –í –æ—Å–Ω–æ–≤–Ω–æ–º —Ü–∏–∫–ª–µ main() –ø—Ä–∏ –≤—ã–∑–æ–≤–µ —Ñ—É–Ω–∫—Ü–∏–∏ app_process_action() –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è –æ–ø—Ä–æ—Å —Å–µ–Ω—Å–æ—Ä–æ–≤ (—Å—Ç—Ä–æ–∫–∞ 12). –≠—Ç–∞ API —É—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞–µ—Ç –ø–µ—Ä–µ–º–µ–Ω–Ω—É—é sendComms –µ—Å–ª–∏ –ø—Ä–æ–∏–∑–æ—à–ª–æ –∏–∑–º–µ–Ω–µ–Ω–∏–µ –ø–∞—Ä–∞–º–µ—Ç—Ä–æ–≤ —Å–µ–Ω—Å–æ—Ä–æ–≤. –í –º–æ—ë–º –ø—Ä–∏–º–µ—Ä–µ —Ñ—É–Ω–∫—Ü–∏–µ–π CSLIB_commUpdate() –ø—Ä–æ—Å—Ç–æ –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è –≤—ã–¥–∞—á–∞ –ø–∞—Ä–∞–º–µ—Ç—Ä–æ–≤ —Å–µ–Ω—Å–æ—Ä–æ–≤ –≤ –æ–∫–Ω–æ —Ç–µ—Ä–º–∏–Ω–∞–ª–∞ –¥–ª—è –≤–∏–∑—É–∞–ª–∏–∑–∞—Ü–∏–∏ —Ä–∞–±–æ—Ç—ã –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è (—Å—Ç—Ä–æ–∫–∏ 14–18). –ù–∞–∫–æ–Ω–µ—Ü, API –≤ —Å—Ç—Ä–æ–∫–µ 20 –ø—Ä–æ–≤–µ—Ä—è–µ—Ç –º–æ–∂–Ω–æ –ª–∏ –ø–æ–º–µ—Å—Ç–∏—Ç—å –ú–ö –≤ –≥–ª—É–±–æ–∫–∏–π —Å–æ–Ω –∏ –¥–µ–ª–∞–µ—Ç —ç—Ç–æ –¥–æ —Å–ª–µ–¥—É—é—â–µ–≥–æ –ø–æ –ø–ª–∞–Ω—É —Å–∫–∞–Ω–∏—Ä–æ–≤–∞–Ω–∏—è —Å–µ–Ω—Å–æ—Ä–æ–≤. –°—Ä–µ–¥–Ω–µ–µ –ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ –≤ —Ä–µ–∂–∏–º–µ –æ–∂–∏–¥–∞–Ω–∏—è –ø—Ä–∏–∫–æ—Å–Ω–æ–≤–µ–Ω–∏—è –ø—Ä–∏ –ø–µ—Ä–∏–æ–¥–µ —Å–∫–∞–Ω–∏—Ä–æ–≤–∞–Ω–∏—è 500 –º—Å –ø–æ–ª—É—á–∏–ª–æ—Å—å –æ–∫–æ–ª–æ 3.5 –º–∫–ê –¥–∞–∂–µ –Ω–∞ —Ç–∞–∫–æ–π –æ—Ç–Ω–æ—Å–∏—Ç–µ–ª—å–Ω–æ —Å—Ç–∞—Ä–æ–π –º–æ–¥–µ–ª–∏ –ú–ö. –ü–æ–¥—Ä–æ–±–Ω–µ–µ –ø—Ä–æ —É–ø–æ–º—è–Ω—É—Ç—ã–µ –∏ –¥—Ä—É–≥–∏–µ API –±–∏–±–ª–∏–æ—Ç–µ–∫–∏ CSLIB –∏ –Ω–∞—Å—Ç—Ä–æ–π–∫—É –µ—ë –ø–∞—Ä–∞–º–µ—Ç—Ä–æ–≤ –º–æ–∂–Ω–æ –ø—Ä–æ—á–∏—Ç–∞—Ç—å –≤ [3] –∏ [4]. –ü–æ–º–∏–º–æ –¥–æ–∫—É–º–µ–Ω—Ç–∞—Ü–∏–∏ –ø–æ –Ω–∞—Å—Ç—Ä–æ–π–∫–∞–º —Å–∏—Å—Ç–µ–º—ã –≤ Simplicity Studio IDE —Ñ–∏—Ä–º—ã –≤—Å—Ç—Ä–æ–µ–Ω –∏–Ω—Å—Ç—Ä—É–º–µ–Ω—Ç Capacitive Sense Profiler –¥–ª—è –≤–∏–∑—É–∞–ª–∏–∑–∞—Ü–∏–∏ —Ä–∞–±–æ—Ç—ã —Å–µ–Ω—Å–æ—Ä–æ–≤. –° —ç—Ç–∏–º –∏–Ω—Å—Ç—Ä—É–º–µ–Ω—Ç–æ–º —É –º–µ–Ω—è –ø–æ–Ω–∞—á–∞–ª—É –±—ã–ª–∞ –º–∞—Å—Å–∞ –ø—Ä–æ–±–ª–µ–º, –ø–æ–∫–∞ —è –Ω–µ —Ä–∞–∑–æ–±—Ä–∞–ª—Å—è –∫–∞–∫ –∞–¥–∞–ø—Ç–∏—Ä–æ–≤–∞—Ç—å –µ–≥–æ –∫ –º–æ–µ–º—É –ú–ö, –∏ –¥–æ —Å–∏—Ö –ø–æ—Ä —è —Å—á–∏—Ç–∞—é, —á—Ç–æ –æ–Ω –Ω–∞—Ö–æ–¥–∏—Ç—Å—è –≤ —Å—Ç–∞–¥–∏–∏ —Ä–∞–∑–≤–∏—Ç–∏—è. –¢–µ–º –Ω–µ –º–µ–Ω–µ–µ, –∏–Ω—Å—Ç—Ä—É–º–µ–Ω—Ç –∑–∞–±–∏—Ä–∞–µ—Ç –¥–∞–Ω–Ω—ã–µ –¥–ª—è –≤–∏–∑—É–∞–ª–∏–∑–∞—Ü–∏–∏ –∏–∑ (–≤–∏—Ä—Ç—É–∞–ª—å–Ω–æ–≥–æ) COM –ø–æ—Ä—Ç–∞ –∫–æ–º–ø—å—é—Ç–µ—Ä–∞, –¥–ª—è —á–µ–≥–æ –∫ –ø—Ä–æ–µ–∫—Ç—É —Å–ª–µ–¥—É–µ—Ç –¥–æ–±–∞–≤–∏—Ç—å –º–æ–¥—É–ª—å USART –∏ –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å–∞ USART-USB, –∞ —Ç–∞–∫–∂–µ –ø—Ä–∏–ª–∞–≥–∞–µ–º—ã–π –∫ –ø—Ä–æ–µ–∫—Ç—É –º–æ–π —Ñ–∞–π–ª profiler_interface.c —Å —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—â–∏–º .h —Ñ–∞–π–ª–æ–º –∑–∞–≥–æ–ª–æ–≤–∫–æ–≤. –ù–∞–¥–µ—é—Å—å, —á—Ç–æ –æ–Ω –±—É–¥–µ—Ç —Ä–∞–±–æ—Ç–∞—Ç—å —Å –ª—é–±—ã–º –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ–º —Å–µ–Ω—Å–æ—Ä–æ–≤ –∏ –ª—é–±—ã–º ARM-–ú–ö —Ñ–∏—Ä–º—ã. –ò–Ω—Å—Ç—Ä—É–º–µ–Ω—Ç Capacitive Sense Profiler —Ä–∞–∑—Ä–∞–±–æ—Ç–∞–Ω –ø—Ä–µ–∂–¥–µ –≤—Å–µ–≥–æ –¥–ª—è —Ä–∞–±–æ—Ç—ã —Å –æ—Ç–ª–∞–¥–æ—á–Ω—ã–º–∏ –ø–ª–∞—Ç–∞–º–∏ —Ñ–∏—Ä–º—ã, –æ–¥–Ω–∞–∫–æ, –µ–≥–æ –º–æ–∂–Ω–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –∏ –±–µ–∑ –Ω–∏—Ö. –í –º–æ—ë–º —Ç–µ—Å—Ç–æ–≤–æ–º –ø—Ä–æ–µ–∫—Ç–µ –¥–ª—è –ø—Ä–æ–≥—Ä–∞–º–º–∏—Ä–æ–≤–∞–Ω–∏—è –ú–ö –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–ª—Å—è –æ—Ç–¥–µ–ª—å–Ω—ã–π –ø—Ä–æ–≥—Ä–∞–º–º–∞—Ç–æ—Ä J-Link, –∞ –¥–∞–Ω–Ω—ã–µ –≤ COM7 –ø–æ—Ä—Ç –∫–æ–º–ø—å—é—Ç–µ—Ä–∞ –ø–µ—Ä–µ—Å—ã–ª–∞–ª–∏—Å—å —Å –ø–æ–º–æ—â—å—é –∞–¥–∞–ø—Ç–µ—Ä–∞ –Ω–∞ CP2104. –ü—Ä–∏ –Ω–∞–∂–∞—Ç–∏–∏ –Ω–∞ –∫–Ω–æ–ø–∫—É Use Device –≤ –æ–∫–Ω–µ –ø—Ä–æ—Ñ–∞–π–ª–µ—Ä–∞ –ø–æ—è–≤–ª—è–µ—Ç—Å—è –æ–∫–æ—à–∫–æ, –ø–æ–∫–∞–∑–∞–Ω–Ω–æ–µ –Ω–∏–∂–µ. –ß—Ç–æ–±—ã –∑–∞—Å—Ç–∞–≤–∏—Ç—å –∏–Ω—Å—Ç—Ä—É–º–µ–Ω—Ç —Ä–∞–±–æ—Ç–∞—Ç—å —Å –≤–∞—à–∏–º USB-UART –∫–æ–Ω–≤–µ—Ä—Ç–æ—Ä–æ–º, —Å–ª–µ–¥—É–µ—Ç –ø—Ä–æ—Å—Ç–æ –≤—ã–±—Ä–∞—Ç—å COM –ø–æ—Ä—Ç –∏ —É—Å—Ç–∞–Ω–æ–≤–∏—Ç—å –µ–≥–æ –ø–∞—Ä–∞–º–µ—Ç—Ä—ã. –í–∞–∂–Ω–æ –ø—Ä–∏ —ç—Ç–æ–º –Ω–µ –∫–ª–∏–∫–∞—Ç—å –Ω–∞ —Å–ø–∏—Å–æ–∫ USB —É—Å—Ç—Ä–æ–π—Å—Ç–≤ –≤ –≤–µ—Ä—Ö–Ω–µ–π —á–∞—Å—Ç–∏ –æ–∫–Ω–∞. –ü–æ—Å–ª–µ —ç—Ç–æ–≥–æ –∏–Ω—Å—Ç—Ä—É–º–µ–Ω—Ç –ø–æ–ø—Ä–æ—Å–∏—Ç –æ—Ä–≥–∞–Ω–∏–∑–æ–≤–∞—Ç—å —Å–±—Ä–æ—Å –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞. –≠—Ç–æ –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ –¥–ª—è –æ—Ç—Å—ã–ª–∫–∏ –≤ –∏–Ω—Å—Ç—Ä—É–º–µ–Ω—Ç –∑–∞–≥–æ–ª–æ–≤–∫–æ–≤ –¥–∞–Ω–Ω—ã—Ö —Å–µ–Ω—Å–æ—Ä–æ–≤ —Ñ—É–Ω–∫—Ü–∏–µ–π –≤ —Å—Ç—Ä–æ–∫–µ 15 –∫–æ–¥–∞ –≤—ã—à–µ (–ø—Ä–∏ –ø–µ—Ä–≤–æ–º –µ—ë –≤—ã–∑–æ–≤–µ), —á—Ç–æ–±—ã –∏–Ω—Å—Ç—Ä—É–º–µ–Ω—Ç –∑–Ω–∞–ª –∫–∞–∫–∏–µ –¥–∞–Ω–Ω—ã–µ —á–µ–º—É —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—Ç. –ö–∞–∂–¥–∞—è –æ—Ç—Å—ã–ª–∞–µ–º–∞—è –∏–Ω—Å—Ç—Ä—É–º–µ–Ω—Ç—É —Å—Ç—Ä–æ–∫–∞ –¥–∞–Ω–Ω—ã—Ö —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É–µ—Ç –æ–¥–Ω–æ–π —Ç–æ—á–∫–µ –Ω–∞ –≥—Ä–∞—Ñ–∏–∫–µ, –ø–æ–∫–∞–∑–∞–Ω–Ω–æ–º –Ω–∏–∂–µ. –ö—Ä–∞—Å–Ω–∞—è –ª–∏–Ω–∏—è –≤ –Ω–∏–∂–Ω–µ–π —á–∞—Å—Ç–∏ –≥—Ä–∞—Ñ–∏–∫–∞ (Baseline) —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É–µ—Ç –¥–∞–Ω–Ω—ã–º —Å–µ–Ω—Å–æ—Ä–∞ –≤ –ø—Ä–æ–º–µ–∂—É—Ç–∫–∞—Ö –º–µ–∂–¥—É –æ–∂–∏–¥–∞–Ω–∏–µ–º –ø—Ä–∏–∫–æ—Å–Ω–æ–≤–µ–Ω–∏–π. –û—Ä–∞–Ω–∂–µ–≤–∞—è –ª–∏–Ω–∏—è –Ω–∞–¥ –Ω–µ–π –ø–æ–∫–∞–∑—ã–≤–∞–µ—Ç –ø–æ—Ä–æ–≥ –ø–µ—Ä–µ—Ö–æ–¥–∞ —Å–µ–Ω—Å–æ—Ä–∞ –≤ –Ω–µ–∞–∫—Ç–∏–≤–Ω—ã–π —Ä–µ–∂–∏–º, –∞ –ø—É—Ä–ø—É—Ä–Ω–∞—è –ª–∏–Ω–∏—è – –ø–æ—Ä–æ–≥ –¥–µ—Ç–µ–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏—è –ø—Ä–∏–∫–æ—Å–Ω–æ–≤–µ–Ω–∏—è. –°–∞–º —Ñ–∞–∫—Ç –¥–µ—Ç–µ–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏—è –ø—Ä–∏–∫–æ—Å–Ω–æ–≤–µ–Ω–∏—è –æ–±–æ–∑–Ω–∞—á–∞–µ—Ç—Å—è —Å–∫–æ–±–∫–∞–º–∏ –≤ –≤–µ—Ä—Ö–Ω–µ–π —á–∞—Å—Ç–∏ –≥—Ä–∞—Ñ–∏–∫–∞ —Å —Å–∏–º–≤–æ–ª–æ–º —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—â–µ–≥–æ —Å–µ–Ω—Å–æ—Ä–∞ (—É –Ω–∞—Å 0). –ó–µ–ª—ë–Ω–∞—è –∫—Ä–∏–≤–∞—è —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É–µ—Ç —Å—ã—Ä—ã–º –¥–∞–Ω–Ω—ã–º —Å–µ–Ω—Å–æ—Ä–∞. –¢–∞–∫–∏–º –æ–±—Ä–∞–∑–æ–º, –Ω–∞ –≥—Ä–∞—Ñ–∏–∫–µ –ø–æ–∫–∞–∑–∞–Ω—ã –º–æ–º–µ–Ω—Ç—ã –¥–µ—Ç–µ–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏—è —á–µ—Ç—ã—Ä—ë—Ö –ø—Ä–∏–∫–æ—Å–Ω–æ–≤–µ–Ω–∏–π. –°–ª–µ–¥—É–µ—Ç —É–ø–æ–º—è–Ω—É—Ç—å, —á—Ç–æ Baseline –∏ –≤—Å–µ –ø–æ—Ä–æ–≥–∏ –ø–æ—Å—Ç–æ—è–Ω–Ω–æ –∫–æ—Ä—Ä–µ–∫—Ç–∏—Ä—É—é—Ç—Å—è –±–∏–±–ª–∏–æ—Ç–µ–∫–æ–π –≤ –∑–∞–≤–∏—Å–∏–º–æ—Å—Ç–∏ –æ—Ç –ø–∞—Ä–∞–º–µ—Ç—Ä–æ–≤ —Å—Ä–µ–¥—ã –∏ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏—è –ø–∏—Ç–∞–Ω–∏—è, –∏ –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç —ç—Ç–æ –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏ –∏ —Å–æ–≤–µ—Ä—à–µ–Ω–Ω–æ –ø—Ä–æ–∑—Ä–∞—á–Ω–æ –¥–ª—è –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª—è. –¢–∞–∫–∏–º –æ–±—Ä–∞–∑–æ–º, –∏–Ω—Å—Ç—Ä—É–º–µ–Ω—Ç –ø–æ–∑–≤–æ–ª—è–µ—Ç –æ–ø—Ä–µ–¥–µ–ª–∏—Ç—å –Ω–∞–¥—ë–∂–Ω–æ—Å—Ç—å –¥–µ—Ç–µ–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏—è –ø—Ä–∏–∫–æ—Å–Ω–æ–≤–µ–Ω–∏–π –¥–ª—è –¥–∞–Ω–Ω–æ–π –∫–æ–Ω—Ñ–∏–≥—É—Ä–∞—Ü–∏–∏ —Å–µ–Ω—Å–æ—Ä–∞ –∏ –≤—ã—Å—Ç–∞–≤–ª–µ–Ω–Ω—ã—Ö –ø–æ—Ä–æ–≥–æ–≤ –≤ —Ñ–∞–π–ª–µ cslib_hwconfig.h –ø—Ä–æ–µ–∫—Ç–∞. –¢–∞–º –∂–µ –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è –∫–æ–Ω—Ñ–∏–≥—É—Ä–∞—Ü–∏—è —Å–∏—Å—Ç–µ–º—ã –¥–ª—è –±–æ—Ä—å–±—ã —Å –¥—Ä–µ–±–µ–∑–≥–æ–º (debouncing). –î–ª—è –Ω–∞–¥—ë–∂–Ω–æ–≥–æ —Ä–∞—Å–ø–æ–∑–Ω–∞–≤–∞–Ω–∏—è –Ω–∞–∂–∞—Ç–∏–π —Ä–µ–∫–æ–º–µ–Ω–¥—É–µ—Ç—Å—è, —á—Ç–æ–±—ã –æ—Ç–Ω–æ—à–µ–Ω–∏–µ —Å–∏–≥–Ω–∞–ª/—à—É–º —Å–µ–Ω—Å–æ—Ä–∞ –±—ã–ª–æ –Ω–µ –º–µ–Ω–µ–µ 5 (—á—Ç–æ –≤ –Ω–∞—à–µ–º —Å–ª—É—á–∞–µ –≤—ã–ø–æ–ª–Ω–µ–Ω–æ). –ï—Å–ª–∏ –≤–∏–∑—É–∞–ª–∏–∑–∞—Ü–∏—è –Ω–µ —Ç—Ä–µ–±—É–µ—Ç—Å—è, —Å–ª–µ–¥—É–µ—Ç –∏—Å–∫–ª—é—á–∏—Ç—å —Å—Ç—Ä–æ–∫–∏ 2 –∏ 15 –∏–∑ –∫–æ–¥–∞ –≤—ã—à–µ, –Ω–∞—Ä—è–¥—É —Å —Ñ–∞–π–ª–∞–º–∏ profiler_interface.*. –§–∞–π–ª —Å –ø–æ–ª–Ω—ã–º –∫–æ–¥–æ–º –ø—Ä–æ–µ–∫—Ç–∞ CSLIB_TG110.sls –Ω–∞—Ö–æ–¥–∏—Ç—Å—è –≤ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–∏. –ü–æ–º–∏–º–æ —Å–∏—Å—Ç–µ–º—ã Simplicity Studio –æ—Ç–∫—Ä—ã—Ç—å –µ–≥–æ –º–æ–∂–Ω–æ ZIP-–∞—Ä—Ö–∏–≤–∞—Ç–æ—Ä–æ–º. –û–¥–Ω–∞–∫–æ, –≤–µ—Ä–Ω—ë–º—Å—è –∫ –ø—Ä–æ–µ–∫—Ç—É –º–æ–¥–µ—Ä–Ω–∏–∑–∞—Ü–∏–∏ —Å–≤–µ—Ç–æ–¥–∏–æ–¥–Ω–æ–π –ø–æ–¥—Å–≤–µ—Ç–∫–∏. –ú–æ–∂–µ—Ç –ø–æ–∫–∞–∑–∞—Ç—å—Å—è —Ä–∞—Å—Ç–æ—á–∏—Ç–µ–ª—å–Ω—ã–º –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å —Ü–µ–ª—ã–π ARM –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –ª–∏—à—å –¥–ª—è —Ä–∞–±–æ—Ç—ã —Å –æ–¥–Ω–∏–º —Å–µ–Ω—Å–æ—Ä–æ–º. –ü–æ–º–∏–º–æ —ç—Ç–æ–≥–æ, –º–Ω–µ –±—ã–ª–æ –∏–Ω—Ç–µ—Ä–µ—Å–Ω–æ –ø–æ–ø—Ä–æ–±–æ–≤–∞—Ç—å –±–∏–±–ª–∏–æ—Ç–µ–∫—É CSLIB —Å –ø—Ä–æ—Å—Ç—ã–º–∏ –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞–º–∏ –∞—Ä—Ö–∏—Ç–µ–∫—Ç—É—Ä—ã 8051, –∫–æ—Ç–æ—Ä—ã–µ –∫ —Ç–æ–º—É –∂–µ —Ç—Ä–µ–±—É—é—Ç –º–µ–Ω—å—à–µ –æ–±–≤—è–∑–∫–∏. –í —Ä–µ–∑—É–ª—å—Ç–∞—Ç–µ –≤–æ–∑–Ω–∏–∫–ª–∞ —Å–ª–µ–¥—É—é—â–∞—è —Å—Ö–µ–º–∞, –≥–¥–µ, –ø–æ —Å—Ä–∞–≤–Ω–µ–Ω–∏—é —Å –ø—Ä–µ–¥—ã–¥—É—â–µ–π, –Ω–µ—Å–∫–æ–ª—å–∫–æ –¥–µ—Ç–∞–ª–µ–π –≤–Ω–µ –¥—Ä–∞–π–≤–µ—Ä–∞ —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–≤ –∑–∞–º–µ–Ω–µ–Ω—ã –∫—Ä–æ—Ö–æ—Ç–Ω—ã–º –ú–ö –≤ 3×3 –º–º –∫–æ—Ä–ø—É—Å–µ QFN20, –∫–æ—Ç–æ—Ä—ã–π –ø–æ–º–∏–º–æ —Ä–∞–±–æ—Ç—ã —Å —Å–µ–Ω—Å–æ—Ä–æ–º –æ–±–µ—Å–ø–µ—á–∏–≤–∞–µ—Ç –∞–≤—Ç–æ–æ—Ç–∫–ª—é—á–µ–Ω–∏–µ –ø–æ–¥—Å–≤–µ—Ç–∫–∏ —Å–ø—É—Å—Ç—è –∑–∞–¥–∞–Ω–Ω–æ–µ –≤—Ä–µ–º—è. –í —Ü–µ–ª—è—Ö —Ç–µ—Å—Ç–∏—Ä–æ–≤–∞–Ω–∏—è —Å—Ö–µ–º–∞ –±—ã–ª–∞ —Å–æ–±—Ä–∞–Ω–∞ –Ω–∞ –±–µ—Å–ø–∞—è—á–Ω–æ–π –º–∞–∫–µ—Ç–Ω–æ–π –ø–ª–∞—Ç–µ. –ö —Å–æ–∂–∞–ª–µ–Ω–∏—é, –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ–µ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ –ø–∏—Ç–∞–Ω–∏—è –ø—Ä–∏–º–µ–Ω—ë–Ω–Ω–æ–≥–æ –ú–ö –Ω–µ –¥–æ–ª–∂–Ω–æ –ø—Ä–µ–≤—ã—à–∞—Ç—å 3.6–í, –ø–æ—ç—Ç–æ–º—É –ø—Ä–∏ —Ç–µ—Å—Ç–∏—Ä–æ–≤–∞–Ω–∏–∏ –æ–Ω –ø–∏—Ç–∞–ª—Å—è –æ—Ç LDO —Å –≤—ã—Ö–æ–¥–Ω—ã–º –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ–º 3–í, —Ä–∞—Å–ø–æ–ª–æ–∂–µ–Ω–Ω—ã–º –º–µ–∂–¥—É –ø–ª–∞—Ç–∞–º–∏. –û–¥–Ω–∞–∫–æ, –ø–æ–¥—Å–≤–µ—Ç–∫–∞ —Ä–∞–±–æ—Ç–∞–µ—Ç –æ—Ç —Ç—Ä—ë—Ö –±–∞—Ç–∞—Ä–µ–π —Ç–∏–ø–∞ AAA –∏ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ –¥–ª—è –ø–∏—Ç–∞–Ω–∏—è –ú–ö –º–æ–∂–Ω–æ –ø–æ–ª—É—á–∏—Ç—å –æ—Ç –¥–≤—É—Ö –∏–∑ –Ω–∏—Ö –±–µ–∑ –¥–æ–ø–æ–ª–Ω–∏—Ç–µ–ª—å–Ω–æ–≥–æ LDO. –°–æ–≥–ª–∞—Å–æ–≤–∞–Ω–∏–µ –ª–æ–≥–∏—á–µ—Å–∫–∏—Ö —É—Ä–æ–≤–Ω–µ–π –ú–ö –∏ –¥—Ä–∞–π–≤–µ—Ä–∞ —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–≤ –Ω–µ –±—É–¥–µ—Ç –ø—Ä–∏ —ç—Ç–æ–º –ø—Ä–æ–±–ª–µ–º–æ–π –∏–∑-–∑–∞ —à–∏—Ä–æ–∫–æ–≥–æ –≤—Ö–æ–¥–Ω–æ–≥–æ –¥–∏–∞–ø–∞–∑–æ–Ω–∞ –ø–æ—Å–ª–µ–¥–Ω–µ–≥–æ. –≠–∫—Å–ø–µ—Ä–∏–º–µ–Ω—Ç—ã –ø–æ–∫–∞–∑–∞–ª–∏ –ø–æ–ª–Ω—É—é —Ä–∞–±–æ—Ç–æ—Å–ø–æ—Å–æ–±–Ω–æ—Å—Ç—å —Å–∏—Å—Ç–µ–º—ã —Å —Ç–µ–º –∂–µ —Ñ—É–Ω–∫—Ü–∏–æ–Ω–∞–ª–æ–º, —á—Ç–æ –∏ –≤ –ø–µ—Ä–≤—ã—Ö –µ—ë –≤–µ—Ä—Å–∏—è—Ö –≤—ã—à–µ. –≠–∫—Å–ø–µ—Ä–∏–º–µ–Ω—Ç–∞–º –Ω–∞ –º–∞–∫–µ—Ç–Ω–æ–π –ø–ª–∞—Ç–µ –ø—Ä–µ–¥—à–µ—Å—Ç–≤–æ–≤–∞–ª–∏ —ç–∫—Å–ø–µ—Ä–∏–º–µ–Ω—Ç—ã –Ω–∞ –æ—Ç–ª–∞–¥–æ—á–Ω–æ–π –ø–ª–∞—Ç–µ SLSTK2010A, –≥–¥–µ –∏–º–µ–µ—Ç—Å—è –∏–∑–º–µ—Ä–∏—Ç–µ–ª—å —Ç–æ–∫–æ–ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏—è, USB-UART –∫–æ–Ω–≤–µ—Ä—Ç–µ—Ä –¥–ª—è —Ä–∞–±–æ—Ç—ã —Å –ø—Ä–æ—Ñ–∞–π–ª–µ—Ä–æ–º, –∞ —Ç–∞–∫–∂–µ 2 —Å–µ–Ω—Å–æ—Ä–Ω—ã–µ –∫–æ–Ω—Ç–∞–∫—Ç–Ω—ã–µ –ø–ª–æ—â–∞–¥–∫–∏. –ò–∑–º–µ—Ä–µ–Ω–Ω–æ–µ –ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ —Å–∏—Å—Ç–µ–º—ã (–±–µ–∑ –¥—Ä–∞–π–≤–µ—Ä–∞ —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–≤) –ø—Ä–∏ —Ç–µ—Ö –∂–µ –ø–∞—Ä–∞–º–µ—Ç—Ä–∞—Ö —Å–∫–∞–Ω–∏—Ä–æ–≤–∞–Ω–∏—è —Å–µ–Ω—Å–æ—Ä–∞ –æ–∫–∞–∑–∞–ª–æ—Å—å –æ–∫–æ–ª–æ 2.3 –º–∫–ê, —á—Ç–æ –Ω–∏–∂–µ, —á–µ–º —É –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–Ω–æ–π —Ä–∞–Ω–µ–µ –º–æ–¥–µ–ª–∏ ARM, –∫–∞–∫ —Å–ª–µ–¥—É–µ—Ç –∏–∑ —Å–ª–µ–¥—É—é—â–µ–≥–æ –≥—Ä–∞—Ñ–∏–∫–∞. –ù–∞ –Ω—ë–º –ø–æ–∫–∞–∑–∞–Ω—ã –º–æ–º–µ–Ω—Ç—ã –¥–µ—Ç–µ–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏—è –¥–≤—É—Ö –ø—Ä–∏–∫–æ—Å–Ω–æ–≤–µ–Ω–∏–π, –∏–Ω–¥–∏—Ü–∏—Ä—É–µ–º—ã—Ö –≤–∫–ª—é—á–µ–Ω–∏–µ–º —Å–≤–µ—Ç–æ–¥–∏–æ–¥–∞ –Ω–∞ –ø–ª–∞—Ç–µ. –ü–æ–ª–Ω—ã–π –∏—Å—Ö–æ–¥–Ω—ã–π –∫–æ–¥ –ø—Ä–æ–µ–∫—Ç–∞ EFM8_500ms.sls —Å–æ–¥–µ—Ä–∂–∏—Ç—Å—è –≤ –ø—Ä–∏–ª–æ–∂–µ–Ω–Ω–æ–º –∞—Ä—Ö–∏–≤–µ. –í –ø—Ä–∏–º–µ—Ä–∞—Ö –ø—Ä–æ–µ–∫—Ç–æ–≤ –≤ Studio –¥–ª—è –ú–ö —Å–µ—Ä–∏–∏ EFM8SB1 —É–∂–µ –∏–º–µ—é—Ç—Å—è –ø—Ä–∏–º–µ—Ä—ã —Ä–∞–±–æ—Ç—ã —Å –±–∏–±–ª–∏–æ—Ç–µ–∫–æ–π CSLIB. –û–¥–Ω–∞–∫–æ, –∫ —Å–æ–∂–∞–ª–µ–Ω–∏—é, –∏–Ω—Å—Ç—Ä—É–º–µ–Ω—Ç Capacitive Sense Profiler —Ç–∞–∫–∂–µ –Ω–µ –ª–∏—à—ë–Ω –Ω–µ–¥–æ—Å—Ç–∞—Ç–∫–æ–≤ –ø—Ä–∏ —Ä–∞–±–æ—Ç–µ —Å –ú–ö —Ç–∏–ø–∞ 8051, –∏ –º–Ω–µ –ø—Ä–∏—à–ª–æ—Å—å –Ω–µ–º–Ω–æ–≥–æ –º–æ–¥–∏—Ñ–∏—Ü–∏—Ä–æ–≤–∞—Ç—å –≥–µ–Ω–µ—Ä–∏—Ä—É–µ–º—ã–π –ø—Ä–æ–µ–∫—Ç–æ–º —Ñ–∞–π–ª profiler_interface.c (—Å—Ç—Ä–æ–∫–∏ 129 –∏ 140) –¥–ª—è –ø–æ–ª—É—á–µ–Ω–∏—è –∞–¥–µ–∫–≤–∞—Ç–Ω—ã—Ö —Ä–µ–∑—É–ª—å—Ç–∞—Ç–æ–≤ –≤–∏–∑—É–∞–ª–∏–∑–∞—Ü–∏–∏. –í —ç–∫—Å–ø–µ—Ä–∏–º–µ–Ω—Ç–∞—Ö —Å –æ—Ç–ª–∞–¥–æ—á–Ω–æ–π –ø–ª–∞—Ç–æ–π –º–µ–Ω—è –∏–Ω—Ç–µ—Ä–µ—Å–æ–≤–∞–ª–∞ –∑–∞–≤–∏—Å–∏–º–æ—Å—Ç—å –Ω–∞–¥—ë–∂–Ω–æ—Å—Ç–∏ –¥–µ—Ç–µ–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏—è –∫–∞—Å–∞–Ω–∏—è —Å–µ–Ω—Å–æ—Ä–∞ –æ—Ç —Ç–æ–ª—â–∏–Ω—ã –∏–∑–æ–ª—è—Ü–∏–æ–Ω–Ω–æ–≥–æ —Å–ª–æ—è –º–∞—Ç–µ—Ä–∏–∞–ª–∞ –Ω–∞–¥ —Å–µ–Ω—Å–æ—Ä–æ–º. –î–ª—è —ç—Ç–æ–≥–æ —è –ø–æ–¥–∫–ª–∞–¥—ã–≤–∞–ª –∫—É—Å–∫–∏ –∫–∞—Ä—Ç–æ–Ω–∞ –Ω–∞ —Å–µ–Ω—Å–æ—Ä–Ω—É—é –ø–ª–æ—â–∞–¥–∫—É –∏ —Ä–µ–≥—É–ª–∏—Ä–æ–≤–∞–ª —Å–∏–ª—É –ø—Ä–∏–∂–∞—Ç–∏—è –ø–∞–ª—å—Ü–∞ –∫ –Ω–∏–º. –ö–∞–∫ —Å–ª–µ–¥—É–µ—Ç –∏–∑ –≥—Ä–∞—Ñ–∏–∫–∞, –Ω–µ–∫–æ—Ç–æ—Ä—ã–µ –ø—Ä–∏–∫–æ—Å–Ω–æ–≤–µ–Ω–∏—è –∫ —Å–µ–Ω—Å–æ—Ä—É –ø—Ä–∏ —ç—Ç–æ–º –Ω–µ –¥–µ—Ç–µ–∫—Ç–∏—Ä–æ–≤–∞–ª–∏—Å—å —Å–∏—Å—Ç–µ–º–æ–π, –∏ –æ–Ω–∞ —Ç—Ä–µ–±–æ–≤–∞–ª–∞ –ø–æ–¥—Å—Ç—Ä–æ–π–∫–∏ –ø–∞—Ä–∞–º–µ—Ç—Ä–æ–≤. –≠–∫—Å–ø–µ—Ä–∏–º–µ–Ω—Ç—ã —ç—Ç–∏ –ø—Ä–æ–≤–æ–¥–∏–ª–∏—Å—å –ø—Ä–∏ –º–∏–Ω–∏–º–∞–ª—å–Ω–æ–π —á—É–≤—Å—Ç–≤–∏—Ç–µ–ª—å–Ω–æ—Å—Ç–∏ –∫–æ–º–ø–∞—Ä–∞—Ç–æ—Ä–∞ –ú–ö (gain=1) –∏ –ø—Ä–∏ –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç–∏ —É–≤–µ–ª–∏—á–µ–Ω–∏–∏ –µ—ë –¥–æ 7 –∏–º–µ–µ—Ç—Å—è –±–æ–ª—å—à–æ–π –∑–∞–ø–∞—Å –ø–æ —á—É–≤—Å—Ç–≤–∏—Ç–µ–ª—å–Ω–æ—Å—Ç–∏. –ò—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏–µ –∏–Ω—Å—Ç—Ä—É–º–µ–Ω—Ç–∞ –ø–æ–∑–≤–æ–ª—è–µ—Ç –¥–æ–≤–æ–ª—å–Ω–æ –ª–µ–≥–∫–æ –∏ –±—ã—Å—Ç—Ä–æ –¥–æ–±–∏—Ç—å—Å—è —Ç—Ä–µ–±—É–µ–º–æ–≥–æ –ø–æ–≤–µ–¥–µ–Ω–∏—è —Å–∏—Å—Ç–µ–º—ã –≤ –∑–∞–≤–∏—Å–∏–º–æ—Å—Ç–∏ –æ—Ç –≥–µ–æ–º–µ—Ç—Ä–∏–∏ —Å–µ–Ω—Å–æ—Ä–∞. –ü—Ä–∏–≤–µ–¥—ë–Ω–Ω–∞—è –≤—ã—à–µ —Å—Ö–µ–º–∞ —Å–æ–±—Ä–∞–Ω–∞ –Ω–∞ –º–∞–ª–µ–Ω—å–∫–æ–π –ø–µ—á–∞—Ç–Ω–æ–π –ø–ª–∞—Ç–µ, –ø—Ä–∏–∫–ª–µ–µ–Ω–Ω–æ–π –ø–æ–≤–µ—Ä—Ö —à—Ç–∞—Ç–Ω–æ–π (–∑–µ–ª—ë–Ω–æ–π) –ø–ª–∞—Ç—ã –ø–æ–¥—Å–≤–µ—Ç–∫–∏. –î–ª—è –æ–±–µ—Å—Ç–æ—á–∏–≤–∞–Ω–∏—è –æ—Ä–∏–≥–∏–Ω–∞–ª—å–Ω–æ–π —ç–ª–µ–∫—Ç—Ä–æ–Ω–∏–∫–∏ –ø–æ–¥—Å–≤–µ—Ç–∫–∏ –∏ –∏—Å–∫–ª—é—á–µ–Ω–∏—è –µ—ë –≤–ª–∏—è–Ω–∏—è –Ω–∞ —Ä–∞–±–æ—Ç—É –Ω–æ–≤–æ–π —Å—Ö–µ–º—ã –ø—Ä–∏—à–ª–æ—Å—å –ø–µ—Ä–µ—Ä–µ–∑–∞—Ç—å –Ω–µ—Å–∫–æ–ª—å–∫–æ –ø–µ—á–∞—Ç–Ω—ã—Ö –¥–æ—Ä–æ–∂–µ–∫ –Ω–∞ –∑–µ–ª—ë–Ω–æ–π –ø–ª–∞—Ç–µ. –ù–µ–æ–±—Ö–æ–¥–∏–º—ã–µ —Å–æ–µ–¥–∏–Ω–µ–Ω–∏—è –Ω–æ–≤–æ–π –ø–ª–∞—Ç—ã —Å —Å–µ–Ω—Å–æ—Ä–æ–º –∏ —Å–≤–µ—Ç–æ–¥–∏–æ–¥–∞–º–∏ —Ä–µ–∞–ª–∏–∑–æ–≤–∞–Ω—ã –Ω–∞–≤–µ—Å–Ω—ã–º–∏ –ø—Ä–æ–≤–æ–ª–æ—á–Ω—ã–º–∏ –ø–µ—Ä–µ–º—ã—á–∫–∞–º–∏. –ö —Å–æ–∂–∞–ª–µ–Ω–∏—é, –±–∏–±–ª–∏–æ—Ç–µ–∫–∞ CSLIB –∑–∞–¥–µ–π—Å—Ç–≤—É–µ—Ç –µ–¥–∏–Ω—Å—Ç–≤–µ–Ω–Ω—ã–π —Ç–∞–π–º–µ—Ä RTC –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞, —Å–ø–æ—Å–æ–±–Ω—ã–π —Ä–∞–±–æ—Ç–∞—Ç—å –≤ —Ä–µ–∂–∏–º–µ Sleep –æ—Ç –Ω–∏–∑–∫–æ—á–∞—Å—Ç–æ—Ç–Ω–æ–≥–æ –≥–µ–Ω–µ—Ä–∞—Ç–æ—Ä–∞, –ø–æ–¥ —Å–≤–æ–∏ –Ω—É–∂–¥—ã. –ü–æ—ç—Ç–æ–º—É –≤–∫–ª—é—á–µ–Ω–∏–µ —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–≤ –ø—Ä–∏ –¥–µ—Ç–µ–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏–∏ –ø—Ä–∏–∫–æ—Å–Ω–æ–≤–µ–Ω–∏—è –∫ —Å–µ–Ω—Å–æ—Ä–Ω–æ–π –ø–ª–æ—â–∞–¥–∫–µ –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è –¥–æ–±–∞–≤–ª–µ–Ω–∏–µ–º —Å—Ç—Ä–æ–∫–∏ 265 –∫ —Ñ—É–Ω–∫—Ü–∏–∏ configurePortsActiveMode() –≤ —Ñ–∞–π–ª–µ hardware_routines.c –ø—Ä–∏ –ø–µ—Ä–µ—Ö–æ–¥–µ –æ—Ç –ø–∞—Å—Å–∏–≤–Ω–æ–≥–æ —Ä–µ–∂–∏–º–∞ —Å–∫–∞–Ω–∏—Ä–æ–≤–∞–Ω–∏—è –∫ –∞–∫—Ç–∏–≤–Ω–æ–º—É. –ü–µ—Ä–∏–æ–¥ –∞–∫—Ç–∏–≤–Ω–æ–≥–æ —Å–∫–∞–Ω–∏—Ä–æ–≤–∞–Ω–∏—è —É—Å—Ç–∞–Ω–æ–≤–ª–µ–Ω —Ç–∞–∫–∂–µ —Ä–∞–≤–Ω—ã–º 500 –º—Å –≤ —Ñ–∞–π–ª–µ cslib.config.h. –¢–∞–º –∂–µ –∑–∞–¥–∞–Ω–æ —á–∏—Å–ª–æ –∞–∫—Ç–∏–≤–Ω—ã—Ö —Å–∫–∞–Ω–∏—Ä–æ–≤–∞–Ω–∏–π –¥–æ –≤–æ–∑–≤—Ä–∞—Ç–∞ –≤ —Ä–µ–∂–∏–º —Å–Ω–∞ (DEF_COUNTS_BEFORE_SLEEP), —á—Ç–æ –∏ –æ–ø—Ä–µ–¥–µ–ª—è–µ—Ç –∑–∞–¥–µ—Ä–∂–∫—É –æ—Ç–∫–ª—é—á–µ–Ω–∏—è. –ù–µ–ø–æ—Å—Ä–µ–¥—Å—Ç–≤–µ–Ω–Ω–æ –æ—Ç–∫–ª—é—á–µ–Ω–∏–µ –ø–æ–¥—Å–≤–µ—Ç–∫–∏ –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è –¥–æ–±–∞–≤–ª–µ–Ω–Ω–æ–π —Å—Ç—Ä–æ–∫–æ–π 273 –∫ —Ñ—É–Ω–∫—Ü–∏–∏ configurePortsSleepMode() –≤ —Ñ–∞–π–ª–µ low_power_config.c –ø—Ä–æ–µ–∫—Ç–∞, –∫–æ—Ç–æ—Ä–∞—è –≤—ã–∑—ã–≤–∞–µ—Ç—Å—è –±–∏–±–ª–∏–æ—Ç–µ–∫–æ–π CSLIB –ø—Ä–∏ –ø–µ—Ä–µ—Ö–æ–¥–µ –æ—Ç –∞–∫—Ç–∏–≤–Ω–æ–≥–æ —Ä–µ–∂–∏–º–∞ —Å–∫–∞–Ω–∏—Ä–æ–≤–∞–Ω–∏—è –∫ –ø–∞—Å—Å–∏–≤–Ω–æ–º—É. –ü–æ–ª–Ω—ã–π –∫–æ–¥ –ø—Ä–æ–µ–∫—Ç–∞ –Ω–∞—Ö–æ–¥–∏—Ç—Å—è –≤ —Ñ–∞–π–ª–µ CSLIB_SB10.sls –≤ –ø—Ä–∏–ª–æ–∂–µ–Ω–Ω–æ–º –∞—Ä—Ö–∏–≤–µ.
–õ–∏—Ç–µ—Ä–∞—Ç—É—Ä–∞ 1. Silicon Labs Knowledge Article: Understanding CSLIB, CAPSENSE, and CSEN.
–§–∞–π–ª—ã: –í—Å–µ –≤–æ–ø—Ä–æ—Å—ã –≤ –§–æ—Ä—É–º.
|
|
||||||||||||
 |
 |


 |
||||

|
||||






–Ý–∞–±–æ—Ç–æ—Å–ø–æ—Å–æ–±–Ω–æ—Å—Ç—å —Å–∞–π—Ç–∞ –ø—Ä–æ–≤–µ—Ä–µ–Ω–∞ –≤ –±—Ä–∞—É–∑–µ—Ä–∞—Ö:
IE8.0, Opera 9.0, Netscape Navigator 7.0, Mozilla Firefox 5.0
–ê–¥–∞–ø—Ç–∏—Ä–æ–≤–∞–Ω –¥–ª—è —Ä–∞–±–æ—Ç—ã –ø—Ä–∏ —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è—Ö —ç–∫—Ä–∞–Ω–∞ –æ—Ç 1280—Ö1024 –∏ –≤—ã—à–µ.
–ü—Ä–∏ –º–µ–Ω—å—à–∏—Ö —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è—Ö –≤–æ–∑–º–æ–∂–Ω–æ –ø–æ—è–≤–ª–µ–Ω–∏–µ –≥–æ—Ä–∏–∑–æ–Ω—Ç–∞–ª—å–Ω–æ–π –ø—Ä–æ–∫—Ä—É—Ç–∫–∏.
–ü–æ –≤—Å–µ–º –≤–æ–ø—Ä–æ—Å–∞–º –æ–±—Ä–∞—â–∞–π—Ç–µ—Å—å –∫ –ö–æ—Ç—É: kot@radiokot.ru
©2005-2026