Хочу по играться с двигателями, кто их сервоми называет, кто без щёточными.
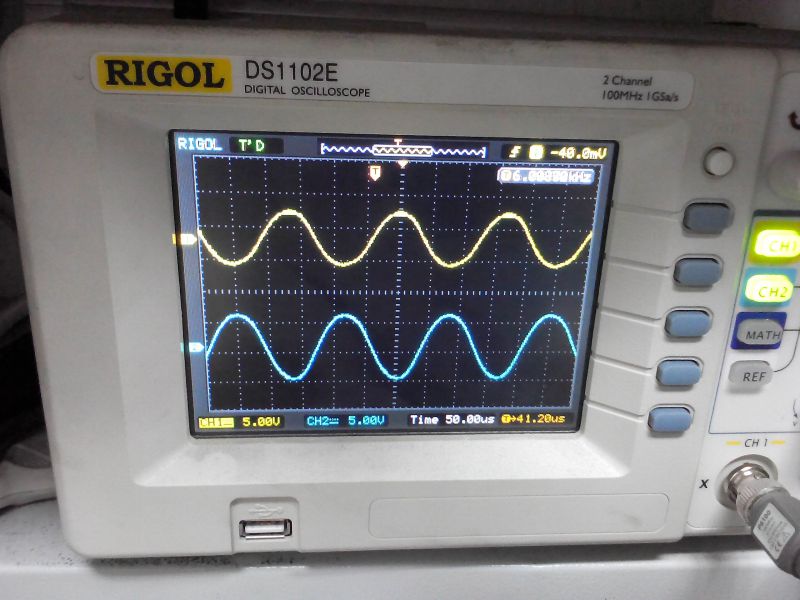
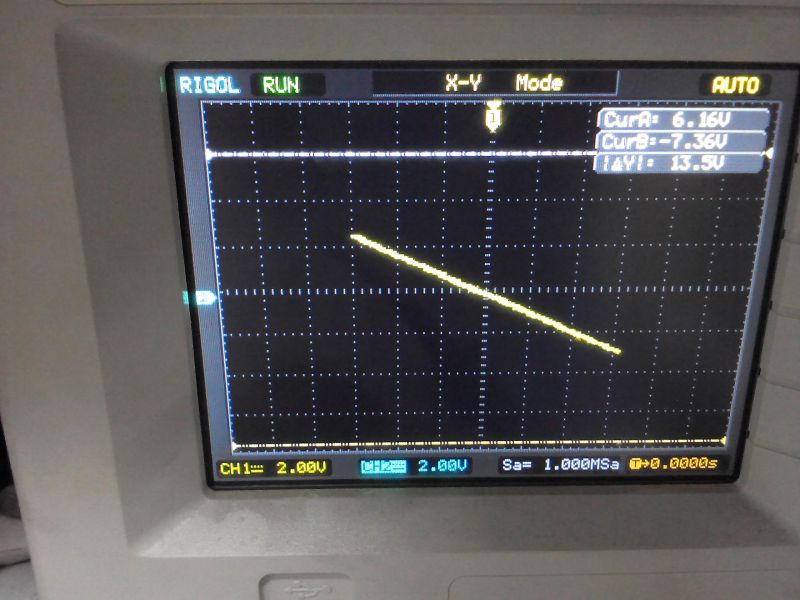
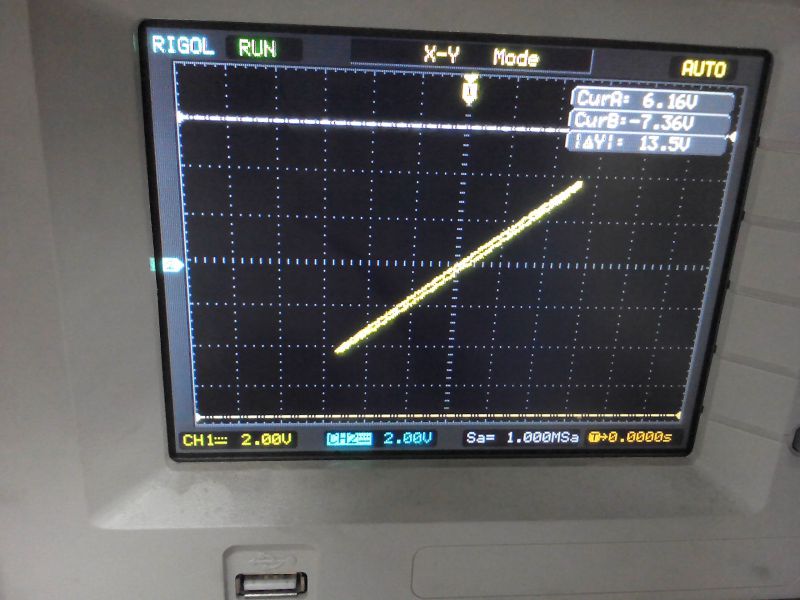
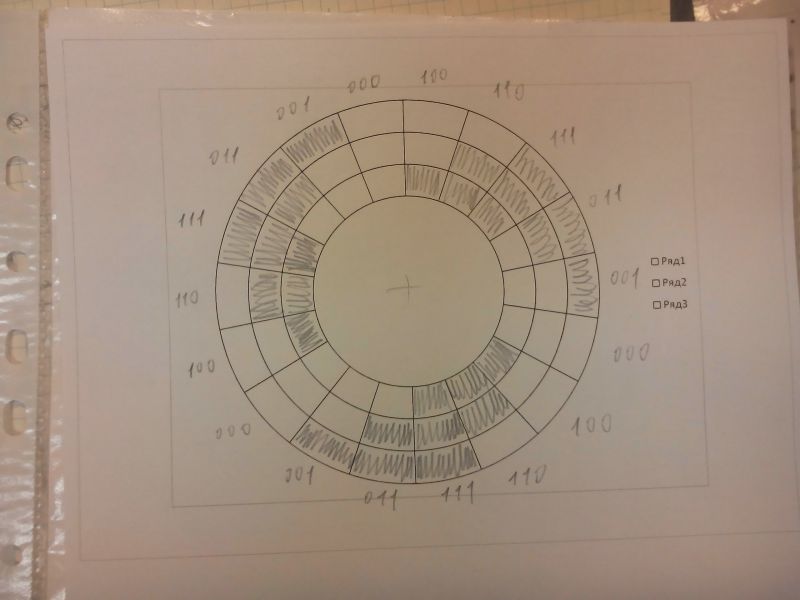
Есть у них датчик положения вала, трансформатор с тремя обмотками, на одну подаётся сигнал, с двух других снимается синусный и косинусный результат. Подробности как работает есть на буржуйском видео.
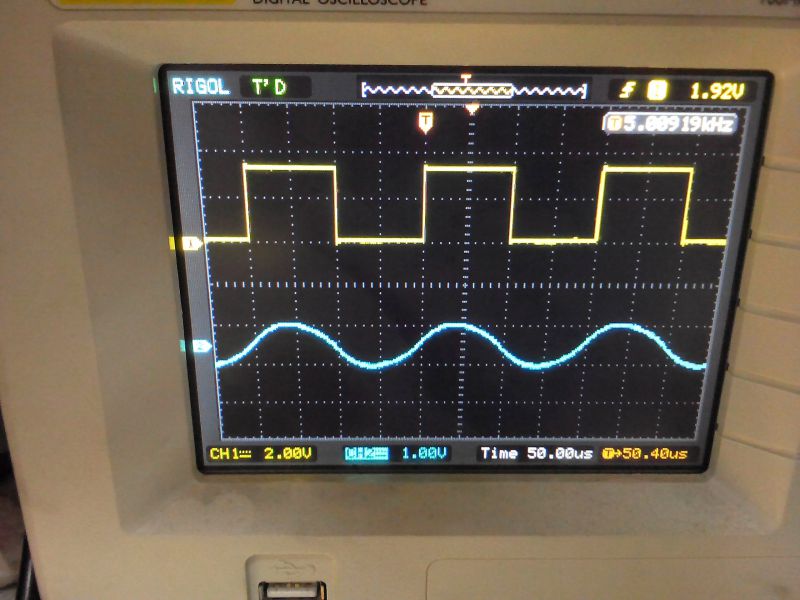
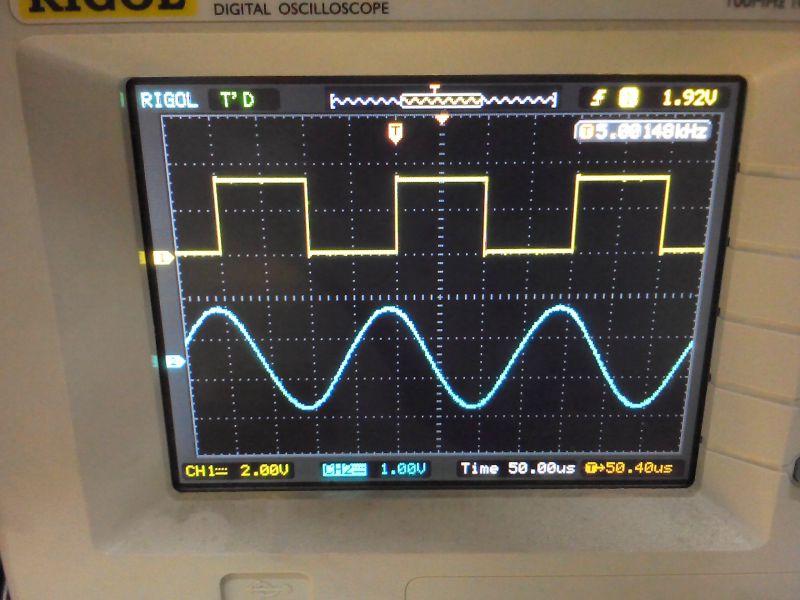
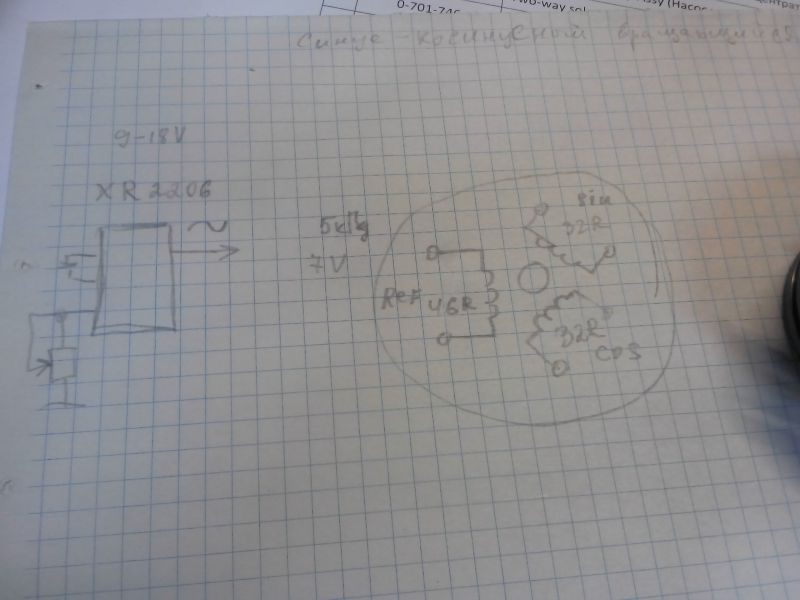
Частота в документации пишут 5кГц, напряжение 7V. Сопротивление первичной обмотки 46 Ом, вторичные по 32 Ома.
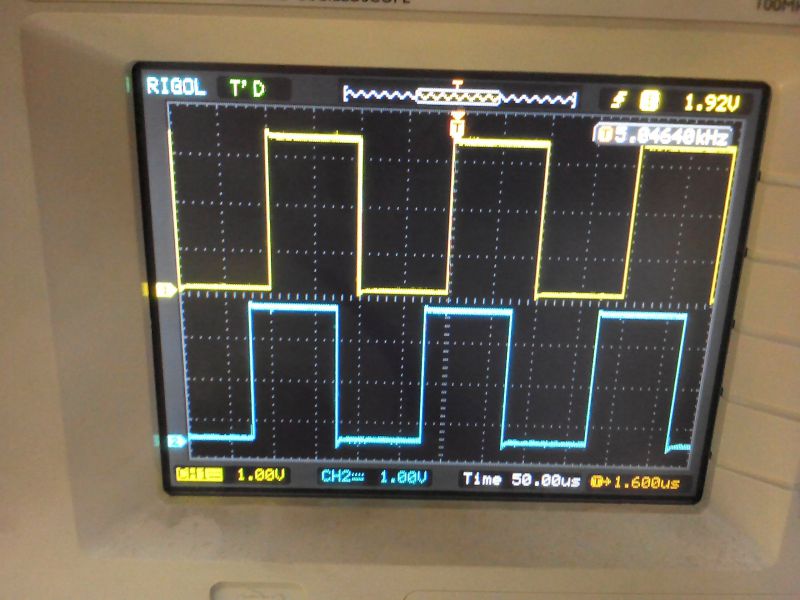
Генератор для синуса думаю сделать на XR2206, а вот какой применить для первичной обмотки усилитель, и что делать с вторичными обмотками, пока не определился. Зависимость от температуры и погрешностей на результат показания исполнительного устройства, тоже пока не известен.
Рад буду выслушать любые предложения по аналоговой части.
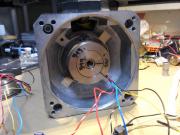


Есть у них датчик положения вала, трансформатор с тремя обмотками, на одну подаётся сигнал, с двух других снимается синусный и косинусный результат. Подробности как работает есть на буржуйском видео.
Спойлер
Генератор для синуса думаю сделать на XR2206, а вот какой применить для первичной обмотки усилитель, и что делать с вторичными обмотками, пока не определился. Зависимость от температуры и погрешностей на результат показания исполнительного устройства, тоже пока не известен.
Рад буду выслушать любые предложения по аналоговой части.

Последний раз редактировалось asvhmao Пн янв 14, 2019 22:58:43, всего редактировалось 1 раз.
„Выживает не самый сильный и не самый умный, а тот, кто лучше всех приспосабливается к изменениям.“
— Чарлз Дарвин
— Чарлз Дарвин