|
–§–æ—Ä—É–º –Ý–∞–¥–∏–æ–ö–æ—Ç • –ü—Ä–æ—Å–º–æ—Ç—Ä —Ç–µ–º—ã - –ê—Å—Å–µ–º–±–ª–µ—Ä (ASM) –¥–ª—è AVR –≤ –≤–æ–ø—Ä–æ—Å–∞—Ö –∏ –æ—Ç–≤–µ—Ç–∞—Ö
–°–æ–æ–±—â–µ–Ω–∏—è –±–µ–∑ –æ—Ç–≤–µ—Ç–æ–≤ | –ê–∫—Ç–∏–≤–Ω—ã–µ —Ç–µ–º—ã
 
|
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 383 –∏–∑ 399
|
[ –°–æ–æ–±—â–µ–Ω–∏–π: 7972 ] |
... , , , , , , ... |
| –ê–≤—Ç–æ—Ä |
–°–æ–æ–±—â–µ–Ω–∏–µ |
shonty

|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Å—Å–µ–º–±–ª–µ—Ä (ASM) –¥–ª—è AVR –≤ –≤–æ–ø—Ä–æ—Å–∞—Ö –∏ –æ—Ç–≤–µ—Ç–∞—Ö  –î–æ–±–∞–≤–ª–µ–Ω–æ: –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –∞–≤–≥ 12, 2024 14:49:50 |
|
| –ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º |
 |
–ö–∞—Ä–º–∞: 1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 39
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —è–Ω–≤ 11, 2012 18:20:26
–°–æ–æ–±—â–µ–Ω–∏–π: 473
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
Starichok51 –ø–∏—Å–∞–ª(–∞): –∞ —Ç—ã –Ω–µ –ø—Ä–æ–±–æ–≤–∞–ª —Å–∫–æ–ø–∏—Ä–æ–≤–∞—Ç—å –∏–µ—Ä–æ–≥–ª–∏—Ñ—ã –∏ –≤—Å—Ç–∞–≤–∏—Ç—å —è –Ø–Ω–¥–µ–∫—Å.–ü–µ—Ä–µ–≤–æ–¥—á–∏–∫? –¢–∞–∫ –∏ –¥–µ–ª–∞—é, –Ω–æ —Ç–æ–ª–∫–∞ –Ω–µ –º–Ω–æ–≥–æ.. –≤—Å–µ —ç—Ç–æ—Ç –¥–∞—Ç–∞—à–∏—Ç —Ä—É–≥–∞—é—Ç.. –ï—Å—Ç—å –∞–Ω–≥–ª–∏–π—Å–∫–∞—è –∏ —Ä—É—Å—Å–∫–∞—è –≤–µ—Ä—Å–∏–∏, –Ω–æ –∏ –æ—Ç –Ω–∏—Ö —Ç–æ–ª–∫–∞ –Ω–µ—Ç, —Ç–∞–∫ –∫–∞–∫ —Å –Ω–µ–≥–æ –ø–µ—Ä–µ–≤–µ–¥–µ–Ω—ã. Starichok51 –ø–∏—Å–∞–ª(–∞): –≤–æ–æ–±—â–µ-—Ç–æ, 8 –¥–∞–µ—Ç 31-–π –±–∏—Ç, –∞ –Ω–µ 15-—ã–π.  —Å–æ–≥–ª–∞—Å–µ–Ω
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
 |
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
shonty
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Å—Å–µ–º–±–ª–µ—Ä (ASM) –¥–ª—è AVR –≤ –≤–æ–ø—Ä–æ—Å–∞—Ö –∏ –æ—Ç–≤–µ—Ç–∞—Ö –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –∞–≤–≥ 19, 2024 19:18:50 |
|
| –ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º |
|
–ö–∞—Ä–º–∞: 1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 39
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —è–Ω–≤ 11, 2012 18:20:26
–°–æ–æ–±—â–µ–Ω–∏–π: 473
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–ê —Ç–µ–º –≤—Ä–µ–º–µ–Ω–µ–º –º—ã —Å LGT8f328p –ø—Ä–æ–¥–æ–ª–∂–∞–µ–º –º—É—á–∏—Ç—å –¥—Ä—É–≥ –¥—Ä—É–≥–∞ –ú–Ω–æ–≥–æ –≤—Å–µ–≥–æ –Ω–µ–¥–æ_–¥–æ–∫—É–º–µ–Ω—Ç—Ä–æ–≤–∞–Ω–Ω–æ–≥–æ –í –∞–ø–ø–∞—Ä–∞—Ç–Ω–æ–π –º–∞—Ç–µ–º–∞—Ç–∏–∫–µ –µ—â—ë —Å—Ç–æ–ª–∫–Ω—É–ª—Å—è —Å –æ–¥–Ω–∏–º –Ω—é–∞–Ω—Å–æ–º.. –Ω–∞ —ç—Ç–æ—Ç —Ä–∞–∑ –≤—ã—á–∏—Ç–∞–Ω–∏–µ.. –ö–æ–¥: ; –ù–∞–ø—Ä–∏–º–µ—Ä –∑–∞–≥—Ä—É–∂–∞–µ–º –≤ –≤—ã—á–∏—Ç–µ–º–æ–µ:
ldi R25, 0x00
ldi R24, 0xFF
ldi R23, 0XFF
ldi R22, 0xFF
; –≤—ã—á–∏—Ç–∞–µ–º:
R26, 0xFF
R27, 0xFF
; –∏ —Ç—É—Ç –º—ã –ø–µ—Ä–µ–¥ —Å–∞–º–æ–π –∑–∞–≥—Ä—É–∑–∫–æ–π –≤ DA –º–µ–Ω—è–µ–º R25:
ser R25
out DSAH, R24 ; –∑–∞–≥—Ä—É–∂–∞–µ–∏ R22..R25 –≤ —Ä–µ–≥–∏—Å—Ç—Ä DA
out DSAL, R22
...
...
; –æ—Ç–≤–µ—Ç –±—É–¥–µ—Ç 0x00FF0000
; —Ç–∞–∫ –∫–∞–∫ R25 –Ω–µ —É—Å–ø–µ–≤–∞–µ—Ç –ø—Ä–æ–≥—Ä—É–∑–∏—Ç—å—Å—è
; –Ω—É–∂–Ω–æ —Ç–∞–∫:
...
ser R25
nop
out DSAH, R24 ; –∑–∞–≥—Ä—É–∂–∞–µ–∏ R22..R25 –≤ —Ä–µ–≥–∏—Å—Ç—Ä DA
out DSAL, R22
...
; —Ç–æ–≥–¥–∞ –æ—Ç–≤–µ—Ç –±—É–¥–µ—Ç 0xFFFF0000 –í–æ–±—â–µ–º, –µ—Å–ª–∏ –∑–Ω–∞—á–µ–Ω–∏–µ –≤ —Ä–µ–≥–∏—Å—Ç—Ä–µ –∏–∑–º–µ–Ω—è–ª–æ—Å—å, —Ç–æ –ø–µ—Ä–µ–¥ –∑–∞–≥—Ä—É–∑–∫–æ–π –≤ DA –Ω—É–∂–µ–Ω –æ–¥–∏–Ω —Ç–∞–∫—Ç, —ç—Ç–æ –µ—Å–ª–∏ –Ω–µ—Ç –ø–µ—Ä–µ—Ö–æ–¥–∞. –∏–Ω—Ç–µ—Ä–µ—Å–Ω—ã–π —á–∏–ø –í—Å–µ–º 
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
shonty
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Å—Å–µ–º–±–ª–µ—Ä (ASM) –¥–ª—è AVR –≤ –≤–æ–ø—Ä–æ—Å–∞—Ö –∏ –æ—Ç–≤–µ—Ç–∞—Ö –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∞–≤–≥ 23, 2024 09:54:36 |
|
| –ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º |
|
–ö–∞—Ä–º–∞: 1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 39
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —è–Ω–≤ 11, 2012 18:20:26
–°–æ–æ–±—â–µ–Ω–∏–π: 473
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–ò –æ–ø—è—Ç—å –Ω–µ –∑–Ω–∞—é, –≤ —Ç–µ–º—É —ç—Ç–æ–π —Ç–µ–º—ã –∏–ª–∏ –Ω–µ—Ç...  –í–æ–∑–Ω–∏–∫–ª–∞ –ø—Ä–æ–±–ª–µ–º–∞ —Å LGT8f328p. –ù–µ –∑–Ω–∞—é, –Ω–∞ 328-–π –º–µ–≥–µ —Ç–∞–∫ –∂–µ –¥–æ–ª–∂–Ω–æ –±—ã—Ç—å, –∏–ª–∏ —ç—Ç–æ "–æ—Å–æ–±–µ–Ω–Ω–æ—Å—Ç–∏" LGT. –°—É—Ç—å —Å–ª–µ–¥—É—é—â–∞—è: –∏–º–µ–µ—Ç—Å—è –≤–µ—Å—å–º–∞ –∫–æ–º–ø–∞–∫—Ç–Ω—ã–π —Ä–∞–±–æ—á–∏–π –∫—É—Å–æ–∫ –∫–æ–¥–∞ —Å –∏–Ω—Å—Ç—Ä—É–∫—Ü–∏–µ–π ICALL. –ù–æ –∫–∞–∫ —Ç–æ–ª—å–∫–æ –æ–Ω –∑–∞–ø–∏—Å—ã–≤–∞–µ—Ç—Å—è –≤ –¥—Ä—É–≥–æ–µ –∞–¥—Ä–µ—Å–Ω–æ–µ –ø—Ä–æ—Å—Ç—Ä–∞–Ω—Å—Ç–≤–æ, –æ–Ω –ø–µ—Ä–µ—Å—Ç–∞—ë—Ç —Ä–∞–±–æ—Ç–∞—Ç—å.. –î–ª—è —á–∏—Å—Ç–æ—Ç—ã —ç–∫—Å–ø–µ—Ä–∏–º–µ–Ω—Ç–∞ —è –ø—Ä–æ—Å—Ç–æ —Ä–∞–∑–º–µ—â–∞–ª –ø–µ—Ä–µ–¥ –Ω–∏–º –ø—É—Å—Ç—ã–µ –¥–∞–Ω–Ω—ã–µ –≤ –≤–∏–¥–µ .db 0x00, 0x00, 0x00... e.t.c.., –∞ –≤ –ø–æ–¥–ø—Ä–æ–≥—Ä–∞–º–º–∞—Ö, –∫—É–¥–∞ –æ—Å—É—â–µ—Å—Ç–≤–ª—è–ª—Å—è –ø–µ—Ä–µ—Ö–æ–¥, –ø—Ä–æ—Ü–µ–¥—É—Ä—ã –∑–∞–º–µ–Ω—è–ª –Ω–∞ NOP-—ã –ï—Å–ª–∏ —Ä–∞–∑–º–µ—Å—Ç–∏—Ç—å –ø–µ—Ä–µ–¥ —ç—Ç–∏–º –∫–æ–¥–æ–º –ø—Ä–∏–º–µ—Ä–Ω–æ 8kB –¥–∞–Ω–Ω—ã—Ö, —Ç–æ –ø—Ä–∏ –≤—ã–∑–æ–≤–µ ICALL –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –∏–¥—ë—Ç –≤ –ø–µ—Ä–µ–∑–∞–≥—Ä—É–∑–∫—É. –ü—Ä–∏ 7kB –æ—Ç—Ä–∞–±–∞—Ç—ã–≤–∞–µ—Ç –Ω–æ—Ä–º–∞–ª—å–Ω–æ. –í –ø—Ä–∏–Ω—Ü–∏–ø–µ, —è –º–æ–≥—É —Ä–∞–∑–º–µ—Å—Ç–∏—Ç—å —ç—Ç–æ—Ç –∫–æ–¥ –≤ –ª—é–±–æ–º –º–µ—Å—Ç–µ —Ñ–ª–µ—à–∞, –Ω–æ –ø—Ä–æ—Å—Ç–æ –∏–Ω—Ç–µ—Ä–µ—Å–Ω–æ, –ø–æ—á–µ–º—É —Ç–∞–∫ –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
Starichok51

|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Å—Å–µ–º–±–ª–µ—Ä (ASM) –¥–ª—è AVR –≤ –≤–æ–ø—Ä–æ—Å–∞—Ö –∏ –æ—Ç–≤–µ—Ç–∞—Ö –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∞–≤–≥ 23, 2024 13:16:01 |
|
| –ú–æ–¥–µ—Ä–∞—Ç–æ—Ä |
 |
–ö–∞—Ä–º–∞: 153
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2927
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –∞–≤–≥ 14, 2010 15:05:51
–°–æ–æ–±—â–µ–Ω–∏–π: 18935
–û—Ç–∫—É–¥–∞: –≥. –û–∑–µ—Ä—Å–∫, –ß–µ–ª—è–±–∏–Ω—Å–∫–∞—è –æ–±–ª.
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 1
")
|
|
–≤ –Ω–æ—Ä–º–∞–ª—å–Ω—ã—Ö AVR ICALL —Ä–∞–±–æ—Ç–∞–µ—Ç –≤ –¥–∏–∞–ø–∞–∑–æ–Ω–µ 128 –∫–ë, –∞ —É —Ç–µ–±—è –ø–æ–ª—É—á–∏–ª—Å—è –¥–ª—è —ç—Ç–æ–π –∫–æ–º–∞–Ω–¥—ã –¥–∏–∞–ø–∞–∑–æ–Ω 8 –∫–ë.
—É —Ç–µ–±—è —Ç–≤–æ–π LGT8f328p –æ—Ç—Ä–∞–±–∞—Ç—ã–≤–∞–µ—Ç —ç—Ç—É –∫–æ–º–∞–Ω–¥—É –∞–Ω–∞–ª–æ–≥–∏—á–Ω–æ RCALL, —Ç–æ–ª—å–∫–æ RCALL —Ä–∞–±–æ—Ç–∞–µ—Ç –≤ –¥–∏–∞–ø–∞–∑–æ–Ω–µ 4 –∫–ë.
_________________
–ú—É–¥—Ä–æ—Å—Ç—å –ø—Ä–∏—Ö–æ–¥–∏—Ç –≤–º–µ—Å—Ç–µ —Å –∏–º–ø–æ—Ç–µ–Ω—Ü–∏–µ–π...
–ö–æ–≥–¥–∞ –Ω–∞ —Ä—É—Å—Å–∫–æ–º —Ñ–æ—Ä—É–º–µ –ø–µ—Ä–µ—Ö–æ–¥—è—Ç –Ω–∞ –í—ã, –≤ —Ä–µ–∞–ª—å–Ω–æ–π –∂–∏–∑–Ω–∏ –Ω–∞—á–∏–Ω–∞—é—Ç –±–∏—Ç—å –º–æ—Ä–¥—É.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
shonty
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Å—Å–µ–º–±–ª–µ—Ä (ASM) –¥–ª—è AVR –≤ –≤–æ–ø—Ä–æ—Å–∞—Ö –∏ –æ—Ç–≤–µ—Ç–∞—Ö –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∞–≤–≥ 23, 2024 14:40:24 |
|
| –ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º |
|
–ö–∞—Ä–º–∞: 1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 39
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —è–Ω–≤ 11, 2012 18:20:26
–°–æ–æ–±—â–µ–Ω–∏–π: 473
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–°–æ—Ä—Ä–∏.. –¢–µ –ø—Ä–æ—Ü–µ–¥—É–¥—ã –ø–∏—Å–∞–ª –±–æ–ª—å—à–µ –Ω–µ–¥–µ–ª–∏ –Ω–∞–∑–∞–¥.. –ò —Å—Ç—Ä–∞–Ω–Ω–æ, —á—Ç–æ –æ–Ω–∏ —Ä–∞–±–æ—Ç–∞–ª–∏.. –ü–æ –∑–∞–ø–∞—Ä–µ –Ω–∞–ø—É—Ç–∞–ª –ø–æ—Å–ª–µ ICALL –≥–¥–µ rjmp, –≥–¥–µ ret...  –ê –æ–±–Ω–∞—Ä—É–∂–∏–ª —Ç–æ–ª—å–∫–æ —Å–µ–≥–æ–¥–Ω—è, –∫–æ–≥–¥–∞ —à—Ä–∏—Ñ—Ç—ã –ø–æ–¥–∫–ª—é—á–∏–ª 20x30 –∏ 30x48 –∏ –±–ª–æ–∫–∏ –∏–∑–æ–±—Ä–∞–∂–µ–Ω–∏–π.. –°–µ–π—á–∞—Å –≤—Å—ë —Ä–∞–±–æ—Ç–∞–µ—Ç. –î–ª—è —É–≤–µ—Ä–µ–Ω–Ω–æ—Å—Ç–∏ –≤—ã—Å—Ç–∞–≤–∏–ª –ø–µ—Ä–µ–¥ ICALL 20kB - –ø–æ–ª—ë—Ç –Ω–æ—Ä–º–∞–ª—å–Ω—ã–π. Starichok51 –ø–∏—Å–∞–ª(–∞): –≤ –Ω–æ—Ä–º–∞–ª—å–Ω—ã—Ö AVR ICALL —Ä–∞–±–æ—Ç–∞–µ—Ç –≤ –¥–∏–∞–ø–∞–∑–æ–Ω–µ –≠—Ç–æ—Ç –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä —Ç–æ–∂–µ –Ω–æ—Ä–º–∞–ª—å–Ω—ã–π.. –í–∏–¥–∏–º–æ —ç—Ç–æ —è –Ω–µ –æ—á–µ–Ω—å.. 
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
shonty
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Å—Å–µ–º–±–ª–µ—Ä (ASM) –¥–ª—è AVR –≤ –≤–æ–ø—Ä–æ—Å–∞—Ö –∏ –æ—Ç–≤–µ—Ç–∞—Ö –î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –∞–≤–≥ 31, 2024 10:12:20 |
|
| –ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º |
|
–ö–∞—Ä–º–∞: 1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 39
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —è–Ω–≤ 11, 2012 18:20:26
–°–æ–æ–±—â–µ–Ω–∏–π: 473
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 1
|
–Ý–µ—à–∏–ª –¥–æ–ø–∏—Å–∞—Ç—å —Ç—É—Ç, —Ä–∞–∑ —É–∂ —Ç—É—Ç –∂—É—Ä–Ω–∞–ª–∏—Ä—É—é—Å—å.. –ú–µ—Å—è—Ü–∞ 2 —Ä–∞–∑–±–∏—Ä–∞–ª—Å—è —Å –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–æ–º (–∞ –≤—Å–µ–≥–æ —É –º–µ–Ω—è 3 –ø–ª–∞—Ç—ã, –∑–∞–∫–∞–∑–∞–Ω—ã—Ö –≤ –∫–∏—Ç–∞–µ —É —Ä–∞–∑–Ω—ã—Ö –ø—Ä–æ–¥–∞–≤—Ü–æ–≤) –∏ –Ω–∞—Å—Ç–∞–ª–æ –≤—Ä–µ–º—è –≤—Å—ë —ç—Ç–æ –∑–∞–≤–µ—Ä—à–∏—Ç—å –∏ —Å–æ–±—Ä–∞—Ç—å —É–∂–µ –≤ –∫–æ—Ä–ø—É—Å.. –°—Ç–µ–Ω–¥ —Ä–µ—à–∏–ª –Ω–µ —Ä–∞–∑–±–∏—Ä–∞—Ç—å.. –î–æ—Å—Ç–∞—é –Ω–æ–≤—É—é –ø–ª–∞—Ç—É, –ø—Ä–æ—à–∏–≤–∞—é –∏.. (–∞ –≤ –ø—Ä–æ–µ–∫—Ç–µ –¥–∏—Å–ø–ª–µ–π ILI9341 240x320) –Ω–∞ –¥–∏—Å–ø–ª–µ–µ –≤—ã–≤–æ–¥–∏—Ç—Å—è –∫–∞–∫ –±–æ–≥ –Ω–∞ –¥—É—à—É –ø–æ–ª–æ–∂–∏–ª  –¢—Ä–µ—Ç—å—è –ø–ª–∞—Ç–∞ —Ç–∞–∫–∂–µ –Ω–µ —Ä–∞–±–æ—Ç–∞–µ—Ç —Å –º–æ–µ–π –ø—Ä–æ—à–∏–≤–∫–æ–π.. –ù–µ–∏—Å–ø—Ä–∞–≤–Ω–æ—Å—Ç—å –ø—Ä–æ—è–≤–ª—è–µ—Ç—Å—è —Å–ª–µ–¥—É—é—â–∏–º –æ–±—Ä–∞–∑–æ–º: –µ—Å–ª–∏ –Ω–∞–ø—Ä–∏–º–µ—Ä –∑–∞–ª–∏–≤–∫–∞ —ç–∫—Ä–∞–Ω–∞ –ø—Ä–æ—Å—Ç–æ –æ–¥–Ω–∏–º —Ü–≤–µ—Ç–æ–º, —Ç–æ —Ä–∞–±–æ—Ç–∞–µ—Ç –±–µ–∑ –Ω–∞—Ä–µ–∫–∞–Ω–∏–π. –ù–æ –µ—Å–ª–∏ –≤—ã–≤–æ–¥ –∏–Ω—Ñ–æ—Ä–º–∞—Ü–∏–∏, —Å —á–∞—Å—Ç–æ–π —Å–º–µ–Ω–æ–π –ø–æ–ª—è –≤—ã–≤–æ–¥–∞ –∏ –ø–µ—Ä–µ–∫–ª—é—á–µ–Ω–∏–µ–º –ø–∏–Ω–∞ –∫–æ–º–∞–Ω–¥–∞/–¥–∞–Ω–Ω—ã–µ, —Ç–æ —Ç–≤–æ—Ä–∏—Ç—Å—è —Å—Ç—Ä–∞–Ω–Ω–æ–µ.. –ß–∞—Å—Ç–∏—á–Ω–æ —É–¥–∞–ª–æ—Å—å –¥–æ–±–∏—Ç—å—Å—è —Ä–∞–±–æ—Ç—ã —Å–Ω–∏–∑–∏–≤ —Ç–∞–∫—Ç–æ–≤—É—é —á–∞—Å—Ç–æ—Ç—É —Å 32–º–≥—Ü –¥–æ 16, —Å—Ç–∞–ª–æ –±–æ–ª–µ–µ –≤–º–µ–Ω—è–µ–º–æ, –Ω–æ –Ω–µ –¥–æ –∫–æ–Ω—Ü–∞.. —Å–Ω–∏–∂–µ–Ω–∏–µ –¥–æ 8–º–≥—Ü —Ä–µ–∑—É–ª—å—Ç–∞—Ç –Ω–µ —É–ª—É—á—à–∏–ª–æ.. –•–æ—Ç—è –Ω–∞ –ø–µ—Ä–≤–æ–º —á–∏–ø–µ —Ä–µ–∑—É–ª—å—Ç–∞—Ç —Å—Ç–∞–±–∏–ª–µ–Ω. –¢–∞–∫–∂–µ –Ω–µ –∫–æ—Ä—Ä–µ–∫—Ç–Ω–æ —Å—á–∏—Ç—ã–≤–∞–µ—Ç—Å—è EEPROM. –ò–∑-–∑–∞ —á–µ–≥–æ —ç—Ç–æ –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç –Ω–µ –∑–Ω–∞—é, –º–æ–∂–µ—Ç –∏ –ø—Ä–∏ –ø–∏—Ç–∞–Ω–∏–∏ 3,3–í —Ä–∞–∑–Ω—ã–µ —á–∏–ø—ã –≤–µ–¥—É—Ç —Å–µ–±—è –ø–æ —Ä–∞–∑–Ω–æ–º—É, —Ö–æ—Ç—è –≤ –¥–∞—Ç–∞—à–∏—Ç–µ –∑–∞—è–≤–ª–µ–Ω–∞ —Ç–∞–∫—Ç–æ–≤–∞—è 32–º–≥—Ü –Ω–∞ –≤–µ—Å—å –¥–∏–∞–ø–∞–∑–æ–Ω –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–π.. –ù–æ –ø–æ–≤—ã—Å–∏—Ç—å –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ –¥–ª—è –ø—Ä–æ–≤–µ—Ä–∫–∏ –º–Ω–µ —Å–ª–æ–∂–Ω–æ–≤–∞—Ç–æ, —Ç–∞–∫ –∫–∞–∫ –¥–≤–µ –ø–µ—Ä–µ—Ñ–µ—Ä–∏–∏ –Ω–∞ 3,3–≤ –í–æ–±—â–µ–º –µ—â—ë –ø—Ä–µ–¥—Å—Ç–æ–∏—Ç —Ä–∞–∑–±–∏—Ä–∞—Ç—å—Å—è.. –≤—ã—Å—Ç–∞–≤–ª—è—Ç—å –≥–¥–µ —Ç–æ –∫–∞–∫–∏–µ —Ç–æ –∑–∞–¥–µ—Ä–∂–∫–∏.. –∏ –∏—Å–∫–∞—Ç—å –∫–æ–º–ø—Ä–æ–º–∏—Å—Å–Ω—ã–π –≤–∞—Ä–∏–∞–Ω—Ç, –ø–æ–¥—Ö–æ–¥—è—â–∏–π –¥–ª—è –≤—Å–µ—Ö —á–∏–ø–æ–≤, –∞ —Ç–∞–∫ –∂–µ –ø—ã—Ç–∞—Ç—å—Å—è –≤–µ—Ä–Ω—É—Ç—å —á–∞—Å—Ç–æ—Ç—É –∫ 32–º–≥—Ü.. –î–æ–±–∏—Ç—å —Ç–æ –ø—Ä–æ–µ–∫—Ç —è –¥–æ–±—å—é, –≤ –∫—Ä–∞–π–Ω–µ–º —Å–ª—É—á–∞–µ –≤–µ—Ä–Ω—É—Å—å –Ω–∞ –º–µ–≥—É 328-—é, –ø—Ä–æ—Å—Ç–æ –¥–µ–ª—é—Å—å –≤–ø–µ—á–∞—Ç–ª–µ–Ω–∏–µ–º, –∏, –µ—Å–ª–∏ —Ä–µ—à–∏—Ç–µ –ø–æ–∑–∞–Ω–∏–º–∞—Ç—å—Å—è —Å LGT8f328p, –∏–º–µ–π—Ç–µ –≤–≤–∏–¥—É, —á—Ç–æ —á–∏–ø—ã –æ—á–µ–Ω—å —Ä–∞–∑–Ω—è—Ç—Å—è, –∏ –ø—Ä–æ—à–∏–≤–∫–∞ –º–æ–∂–µ—Ç –æ–∫–∞–∑–∞—Ç—å—Å—è –Ω–µ–ø–æ–≤—Ç–æ—Ä—è–µ–º–∞. PS –°–ø–æ–π–ª–µ—Ä–≤–º–µ—Å—Ç–æ LGT8f328p –ø–æ—á–µ–º—É —Ç–æ —É–∂–µ —Ö–æ—á–µ—Ç—Å—è –Ω–∞–ø–∏—Å–∞—Ç—å LGBT8f328p  PS2 –Ý–∞–∑–æ–±—Ä–∞–ª—Å—è. –ü—Ä–æ–±–ª–µ–º–∞ –±—ã–ª–∞ –≤ –ø–æ—Å—Ç–æ—è–Ω–Ω–æ –≤–∫–ª—é—á–µ–Ω–æ–º –∞—Ä–∏—Ñ–º–µ—Ç–∏—á–µ—Å–∫–æ–º –º–æ–¥—É–ª–µ uDSC. –ü—Ä–æ—è–≤–ª—è–ª–∞—Å—å (—É –º–µ–Ω—è) –Ω–∞ –∏–Ω—Å—Ç—Ä—É–∫—Ü–∏—è—Ö brts –∏ sbrc, –ø—Ä–∏—á—ë–º –Ω–µ –≤–æ—Ç –ø–æ—Å—Ç–æ—è–Ω–Ω–æ, –∞ –∑–∞–≤–∏—Å–∏–ª–æ –æ—Ç —Ä—è–¥–∞ —Ñ–∞–∫—Ç–æ—Ä–æ–≤, –≤–∫–ª—é—á–∞—è —Ç–∞–∫—Ç–æ–≤—É—é —á–∞—Å—Ç–æ—Ç—É. –ù–µ –∑–Ω–∞—é, –º–æ–∂–µ—Ç –≤ —ç–º—É–ª—è—Ç–æ—Ä–∞—Ö —ç—Ç–æ –º–æ–∂–Ω–æ —Ä–∞–∑–≥–ª—è–¥–µ—Ç—å.. –Ω–æ —è –Ω–µ –ø–æ–ª—å–∑—É—é—Å—å –∏–º–∏ –ü–æ–ø—Ä–∞–≤–∏–ª –∫–æ–¥. uDSC —Ç–µ–ø–µ—Ä—å –≤–∫–ª—é—á–∞–µ—Ç—Å—è –Ω–µ–ø–æ—Å—Ä–µ–¥—Å—Ç–≤–µ–Ω–Ω–æ –Ω–∞ –≤—Ä–µ–º—è –≤—ã–ø–æ–ª–Ω–µ–Ω–∏—è –æ–ø–µ—Ä–∞—Ü–∏–∏. –í—Å—ë —Ä–∞–±–æ—Ç–∞–µ—Ç, –Ω–∞ –≤—Å–µ—Ö —á–∞—Å—Ç–æ—Ç–∞—Ö. –ù–æ! –û–¥–∏–Ω —á–∏–ø –∏—Å–ø—Ä–∞–≤–Ω–æ —Ä–∞–±–æ—Ç–∞–µ—Ç –ø—Ä–∏ –ø–æ—Å—Ç–æ—è–Ω–Ω–æ –≤–∫–ª—é—á–µ–Ω–æ–º uDSC, –∞ –≤–æ—Ç 2 –¥—Ä—É–≥–∏—Ö –∫–∞–ø—Ä–∏–∑–Ω–∏—á–∞—é—Ç)) —á–∏–ø –Ω–æ—Ä–º–∞–ª—å–Ω—ã–π –ø—Ä–∏–≤—ã–∫–Ω—É—Ç—å –Ω—É–∂–Ω–æ
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
Just_Fluffy
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Å—Å–µ–º–±–ª–µ—Ä (ASM) –¥–ª—è AVR –≤ –≤–æ–ø—Ä–æ—Å–∞—Ö –∏ –æ—Ç–≤–µ—Ç–∞—Ö –î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –∞–≤–≥ 31, 2024 11:45:25 |
|
| –í—ã–º–æ–≥–∞—Ç–µ–ª—å –ø—Ä–∏–ø–æ—è |
 |
–ö–∞—Ä–º–∞: 10
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 171
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –∏—é–Ω 29, 2022 16:25:45
–°–æ–æ–±—â–µ–Ω–∏–π: 532
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
shonty, –° –¥–∏—Å–ø–ª–µ–µ–º –æ–±—Ä–∞—Ç–∏—Ç–µ –≤–Ω–∏–º–∞–Ω–∏–µ, —Å–∏–≥–Ω–∞–ª D/C (–∞ —Ç–∞–∫ –∂–µ CS, –µ—Å–ª–∏ –ø–æ–ª—å–∑—É–µ—Ç–µ) –Ω—É–∂–Ω–æ –ø–µ—Ä–µ–∫–ª—é—á–∞—Ç—å –ø–æ—Å–ª–µ –æ–∫–æ–Ω—á–∞–Ω–∏—è –ø–µ—Ä–µ–¥–∞—á–∏ –±–∞–π—Ç–∞ –ø–æ SPI. –ö–æ–≥–¥–∞ —Ç–æ —è –Ω–∞ —ç—Ç–æ–º —Å–ø–æ—Ç–∫–Ω—É–ª–∞—Å—å. –¢.–µ. –ø–µ—Ä–µ–¥ –ø–µ—Ä–µ–∫–ª—é—á–µ–Ω–∏–µ–º D/C –Ω—É–∂–Ω–æ –¥–æ–∂–¥–∞—Ç—å—Å—è –æ–∫–æ–Ω—á–∞–Ω–∏—è –ø–µ—Ä–µ–¥–∞—á–∏ SPI.
_________________
–ë–µ–ª–∞—è –∏ –ü—É—à–∏—Å—Ç–∞—è
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
ARV
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Å—Å–µ–º–±–ª–µ—Ä (ASM) –¥–ª—è AVR –≤ –≤–æ–ø—Ä–æ—Å–∞—Ö –∏ –æ—Ç–≤–µ—Ç–∞—Ö –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å —Å–µ–Ω 01, 2024 13:56:21 |
|
| –£–º, —á–µ—Å—Ç—å –∏ —Å–æ–≤–µ—Å—Ç—å. –ò —Å–∫—Ä–æ–º–Ω–æ—Å—Ç—å. |
 |
–ö–∞—Ä–º–∞: 98
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2135
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –¥–µ–∫ 28, 2006 08:19:56
–°–æ–æ–±—â–µ–Ω–∏–π: 18454
–û—Ç–∫—É–¥–∞: –ù–æ–≤–æ—á–µ—Ä–∫–∞—Å—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 2
")
")
|
|
–û –¥–µ–ª–µ–Ω–∏–∏ 0xFFFFFFFF –Ω–∞ –ª—é–±–æ–µ —á–∏—Å–ª–æ: 0xFFFFFFFF —ç—Ç–æ -1, –µ–≥–æ –Ω–∞ —á—Ç–æ –Ω–µ –ø–æ–¥–µ–ª–∏ —Ü–µ–ª–æ—á–∏—Å–ª–µ–Ω–Ω–æ, 0 –∏ –ø–æ–ª—É—á–∏—à—å. –û—á–µ–≤–∏–¥–Ω–æ, –¥–µ–ª–µ–Ω–∏–µ –∑–Ω–∞–∫–æ–≤–æ–µ.
_________________
–µ—Å–ª–∏ —Ä–∞—Å—Å–º–∞—Ç—Ä–∏–≤–∞—Ç—å —á–µ–ª–æ–≤–µ–∫–∞ —Å–Ω–∏–∑—É, –ø–æ–∫–∞–∂–µ—Ç—Å—è, —á—Ç–æ –º–æ–∑–≥ —É –Ω–µ–≥–æ –≥–ª—É–±–æ–∫–æ –≤ –∂–æ–ø–µ
–ø—Ä–∏ –≤–∑–≥–ª—è–¥–µ –Ω–∞ –º–Ω–æ–≥–∏—Ö —Å–≤–µ—Ä—Ö—É –Ω–∏—á–µ–≥–æ –Ω–µ –º–µ–Ω—è–µ—Ç—Å—è...
–ú–æ–π —É—é—Ç–Ω—ã–π –±–ª–æ–∂–∏–∫... –∑–∞—Ö–æ–¥–∏—Ç–µ!
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
shonty
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Å—Å–µ–º–±–ª–µ—Ä (ASM) –¥–ª—è AVR –≤ –≤–æ–ø—Ä–æ—Å–∞—Ö –∏ –æ—Ç–≤–µ—Ç–∞—Ö –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –Ω–æ—è 19, 2024 11:39:13 |
|
| –ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º |
|
–ö–∞—Ä–º–∞: 1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 39
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —è–Ω–≤ 11, 2012 18:20:26
–°–æ–æ–±—â–µ–Ω–∏–π: 473
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 1
|
–í—Å–µ–º –î–∞–≤–Ω–æ –∫–∞–∫ —Ç–æ —É—á–∞—Å—Ç–Ω–∏–∫ —Å–ø—Ä–∞—à–∏–≤–∞–ª (–æ–Ω —ç–Ω–∫–æ–¥–µ—Ä –Ω–∞ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è –≤–µ—à–∞–ª), –Ω–æ —Ä–µ—à–µ–Ω–∏–µ —Ç–∞–∫ –∏ –Ω–µ –Ω–∞—à–ª–æ—Å—å: –ó–¥—Ä–∞–≤—Å—Ç–≤—É–π—Ç–µ!
...
–ù–∞–ø–∏—Å–∞–ª –ø—Ä–æ—Å—Ç–µ–π—à—É—é –ø—Ä–æ–≥—Ä–∞–º–º–∫—É, –∫–æ—Ç–æ—Ä–∞—è –ø–æ –≤–Ω–µ—à–Ω–∏–º –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è–º –æ–ø—Ä–∞—à–∏–≤–∞–µ—Ç —ç–Ω–∫–æ–¥–µ—Ä, –∏–Ω–∫—Ä–µ–º–µ–Ω—Ç–∏—Ä—É–µ—Ç/–¥–µ–∫—Ä–µ–º–µ–Ω—Ç–∏—Ä—É–µ—Ç –∑–Ω–∞—á–µ–Ω–∏–µ –≤ —Ä–µ–≥–∏—Å—Ç—Ä–µ –∏ —Å—Ä–∞–∑—É –æ—Ç–ø—Ä–∞–≤–ª—è–µ—Ç –ø–æ UART.
...
...
–ü—Ä–æ–±–ª–µ–º–∞ –≤ —Ç–æ–º, —á—Ç–æ –Ω–µ–∑–∞–≤–∏—Å–∏–º–æ –æ—Ç –Ω–∞–ø—Ä–∞–≤–ª–µ–Ω–∏—è –≤—Ä–∞—â–µ–Ω–∏—è —ç–Ω–∫–æ–¥–µ—Ä–∞ –ø–æ–ª—É—á–∞–µ—Ç—Å—è —Ç–æ–ª—å–∫–æ –∏–Ω–∫—Ä–µ–º–µ–Ω—Ç (–∏–ª–∏ —Ç–æ–ª—å–∫–æ –¥–µ–∫—Ä–µ–º–µ–Ω—Ç, –µ—Å–ª–∏ –ø–µ—Ä–µ—Ö–æ–¥ –Ω–µ –ø–æ sbis, –∞ –ø–æ sbic). –ö–∞–∫ –±—É–¥—Ç–æ –≤—Ç–æ—Ä–æ–π –∫–∞–Ω–∞–ª —ç–Ω–∫–æ–¥–µ—Ä–∞ –ø–æ—Å—Ç–æ—è–Ω–Ω–æ –Ω–∞—Ö–æ–¥–∏—Ç—Å—è –≤ 1.
...
... –í–æ—Ç –∏ —è –∑–∞–¥–∞–ª—Å—è —ç—Ç–∏–º –∂–µ –≤–æ–ø—Ä–æ—Å–æ–º. –ü—Ä–∏ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏–∏ —ç–Ω–∫–æ–¥–µ—Ä–∞ —Ä–∞–Ω—å—à–µ —á—É–∂–∏–º –∫–æ–¥–æ–º –ø–æ–ª—å–∑–æ–≤–∞–ª—Å—è. –ù–æ –æ–Ω, –∫–∞–∫ –ø–æ –º–Ω–µ, –∏–∑–ª–∏—à–Ω–µ —Å–ª–æ–∂–µ–Ω, –≥—Ä–æ–º–æ–∑–¥–æ–∫ –∏ –∏–Ω—Ç—É–∏—Ç–∏–≤–Ω–æ –Ω–µ–ø–æ–Ω—è—Ç–µ–Ω. –û–ø—Ä–æ—Å —ç–Ω–∫–æ–¥–µ—Ä–∞ –±—ã–ª –≤ –æ—Å–Ω–æ–≤–Ω–æ–º —Ü–∏–∫–ª–µ, –ø–æ—Ç–æ–º –ø—Ä–æ–≤–µ—Ä–∫–∞ –Ω–∞ –¥—Ä–µ–±–µ–∑–≥ –≤ —Ç–∞–π–º–µ—Ä–µ.. –ö—Ä–æ–º–µ —Ç–æ–≥–æ, –Ω–µ —Å–º–æ—Ç—Ä—è –Ω–∞ –≤—Å—é –Ω–∞–≤–æ—Ä–æ—á–µ–Ω–Ω–æ—Å—Ç—å –∫–æ–¥–∞, —è –ø—Ä–æ–≤–µ—Ä—è–ª —Ä–∞–±–æ—Ç—É —ç–Ω–∫–æ–¥–µ—Ä–∞ –Ω–∞ 8-–º–∏ —Å–≤–µ—Ç–æ–¥–∏–æ–¥–∞—Ö, –Ω–∞–±–ª—é–¥–∞–ª–∏—Å—å —Ç–æ –ø—Ä–æ–ø—É—Å–∫–∏ —â–µ–ª—á–∫–æ–≤, —Ç–æ –≤–æ–æ–±—â–µ –≤ –æ–±—Ä–∞—Ç–∫—É –ø—Ä–æ—Å—Ç—Ä–µ–ª–∏–≤–∞–ª.. –Ø –±—ã–ª–æ –≥—Ä–µ—à–∏–ª –Ω–∞ –Ω–µ–∫–∞—á–µ—Å—Ç–≤–µ–Ω–Ω—ã–π —ç–Ω–∫–æ–¥–µ—Ä, –Ω–æ, –∫–∞–∫ –ø–æ—Ç–æ–º –æ–∫–∞–∑–∞–ª–æ—Å—å, —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º –≤—Å—ë –≤–ø–æ—Ä—è–¥–∫–µ. –Ý–µ—à–∏–ª –ø–æ–∏—Å–∫–∞—Ç—å —á—Ç–æ-—Ç–æ –ø–æ–ª—É—á—à–µ.. –Ω–æ –≤ –∏—Ç–æ–≥–µ –ø—Ä–∏—à–ª–æ—Å—å –ø–∏—Å–∞—Ç—å —Å–∞–º–æ–º—É.. –û–∫–∞–∑–∞–ª–æ—Å—å —Å–æ–≤—Å–µ–º –Ω–µ—Å–ª–æ–∂–Ω–æ. –ü—Ä–æ–≤–µ—Ä—è–ª –≤—Å—ë –Ω–∞ —Ç–æ–π –∂–µ –ø–ª–∞—Ç–µ —Å –≤–æ—Å–µ–º—å—é —Å–≤–µ—Ç–æ–¥–∏–æ–¥–∞–º–∏, —Ä–∞–±–æ—Ç–∞–µ—Ç —á—ë—Ç–∫–æ, –∫–∞–∫ –ø—Ä–∏ –±—ã—Å—Ç—Ä–æ–º –≤—Ä–∞—â–µ–Ω–∏–∏, —Ç–∞–∫ –∏ –ø—Ä–∏ –º–µ–¥–ª–µ–Ω–Ω–æ–º.  –ï—Å–ª–∏ –µ—â—ë –¥–ª—è –∫–æ–≥–æ-—Ç–æ –∞–∫—Ç—É–∞–ª—å–Ω–æ: –°–ø–æ–π–ª–µ—Ä–ö–æ–¥: ; –û–ø—Ä–µ–¥–µ–ª–µ–Ω–∏–µ –ø–æ–¥–∫–ª—é—á–µ–Ω–∏—è –∫–∞–Ω–∞–ª–æ–≤. –ó–¥–µ—Å—å –∂–µ –º–µ–Ω—è–µ—Ç—Å—è –Ω–∞–ø—Ä–∞–≤–ª–µ–Ω–∏–µ –≤—Ä–∞—â–µ–Ω–∏—è:
.equ CANAL_A = 1 ; –∫–∞–Ω–∞–ª –ê (PIND 1)
.equ CANAL_B = 2 ; –∫–∞–Ω–∞–ª –ê (PIND 2)
–ö–æ–¥: ; ---------- –ì–ª–∞–≤–Ω—ã–π —Ü–∏–∫–ª ----------
LOOP:
...
...
...
Read_ENC:
sbis PIND, CANAL_A
rjmp ROTATE_LEFT ; –ø–µ—Ä–µ—Ö–æ–¥ –µ—Å–ª–∏ —Å–∏–≥–Ω–∞–ª –≤ –∫–∞–Ω–∞–ª–µ "A"
sbis PIND, CANAL_B
rjmp ROTATE_RIGHT ; –ø–µ—Ä–µ—Ö–æ–¥ –µ—Å–ª–∏ —Å–∏–≥–Ω–∞–ª –≤ –∫–∞–Ω–∞–ª–µ "B"
exit_read_enc:
...
...
...
rjmp LOOP ; –≤ –Ω–∞—á–∞–ª–æ —Ü–∏–∫–ª–∞
----------
–ö–æ–¥: ROTATE_LEFT:
; –ø—Ä–æ–≤–µ—Ä–∫–∞ –Ω–∞ –≤—Ä–∞—â–µ–Ω–∏–µ –≤–ª–µ–≤–æ:
sbis PIND, CANAL_A
rjmp PC-1 ; –∂–¥—ë–º –∫–æ–≥–¥–∞ –∫–∞–Ω–∞–ª "A" –¥–µ–∞–∫—Ç–∏–≤–∏—Ä—É–µ—Ç—Å—è
sbic PIND, CANAL_B
rjmp exit_read_enc ; –µ—Å–ª–∏ –∫–∞–Ω–∞–ª "B" –¥–µ–∞–∫—Ç–∏–≤–∏—Ä–æ–≤–∞–Ω, —Ç–æ –Ω–∞ –≤—ã—Ö–æ–¥
; –ø—Ä–æ—Ü–µ–¥—É—Ä–∞:
...
...
...
ROTATE_RIGHT:
; –ø—Ä–æ–≤–µ—Ä–∫–∞ –Ω–∞ –≤—Ä–∞—â–µ–Ω–∏–µ –≤–ø—Ä–∞–≤–æ:
sbis PIND, CANAL_B
rjmp PC-1 ; –∂–¥—ë–º –∫–æ–≥–¥–∞ –∫–∞–Ω–∞–ª "B" –¥–µ–∞–∫—Ç–∏–≤–∏—Ä—É–µ—Ç—Å—è
sbic PIND, CANAL_A
rjmp exit_read_enc ; –µ—Å–ª–∏ –∫–∞–Ω–∞–ª "A" –¥–µ–∞–∫—Ç–∏–≤–∏—Ä–æ–≤–∞–Ω, —Ç–æ –Ω–∞ –≤—ã—Ö–æ–¥
; –ø—Ä–æ—Ü–µ–¥—É—Ä–∞:
...
...
... PS: –í —Å—Ö–µ–º–µ –∫–∞–Ω–∞–ª—ã —ç–Ω–∫–æ–¥–µ—Ä–∞ –ø–æ–¥–∫–ª—é—á–µ–Ω—ã –∫ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä—É –∫ –≤—ã–≤–æ–¥–∞–º —Å –≤–Ω—É—Ç—Ä–µ–Ω–Ω–µ–π –ø–æ–¥—Ç—è–∂–∫–æ–π –∫ VCC
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
shonty
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Å—Å–µ–º–±–ª–µ—Ä (ASM) –¥–ª—è AVR –≤ –≤–æ–ø—Ä–æ—Å–∞—Ö –∏ –æ—Ç–≤–µ—Ç–∞—Ö –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –Ω–æ—è 20, 2024 13:50:56 |
|
| –ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º |
|
–ö–∞—Ä–º–∞: 1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 39
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —è–Ω–≤ 11, 2012 18:20:26
–°–æ–æ–±—â–µ–Ω–∏–π: 473
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–ù–æ –µ—Å–ª–∏ —Å–ª–µ–¥–æ–≤–∞—Ç—å –¥–∞–æ—Å—Å–∫–æ–π –ø—Ä–∞–∫—Ç–∏–∫–µ —Å–∏–º–≤–æ–ª–∏—á–µ—Å–∫–æ–π –æ—Ä–≥–∞–Ω–∏–∑–∞—Ü–∏–∏ –ø—Ä–æ—Å—Ç—Ä–∞–Ω—Å—Ç–≤–∞, —Ç–æ –≤ —Ü–∏–∫–ª–µ –ø—Ä–∞–≤–∏–ª—å–Ω–µ–µ –±—É–¥–µ—Ç –ø—Ä–æ–≤–µ—Ä—è—Ç—å —Å–æ—Å—Ç–æ—è–Ω–∏–µ –≤—Å–µ–≥–æ –ø–æ—Ä—Ç–∞, –∞ –Ω–µ –æ—Ç–¥–µ–ª—å–Ω—ã—Ö –ø–∏–Ω–æ–≤. –û—Å–æ–±–µ–Ω–Ω–æ –µ—Å–ª–∏ —ç–ª–µ–º–µ–Ω—Ç–æ–≤ —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è –±—É–¥–µ—Ç –Ω–µ—Å–∫–æ–ª—å–∫–æ. –ü–æ—ç—Ç–æ–º—É –≥–ª–∞–≤–Ω—ã–π —Ü–∏–∫–ª –ª—É—á—à–µ –ø–µ—Ä–µ–ø–∏—Å–∞—Ç—å —Ç–∞–∫: –ö–æ–¥: ;---------- –ì–ª–∞–≤–Ω—ã–π —Ü–∏–∫–ª ----------
LOOP:
in R16, PIND
andi R16, (1<<CANAL_A)|(1<<CANAL_B)
cpi R16, (1<<CANAL_A)|(1<<CANAL_B)
breq LOOP
sbrs R16, CANAL_A
rjmp ROTATE_LEFT ; –ø–µ—Ä–µ—Ö–æ–¥ –µ—Å–ª–∏ —Å–∏–≥–Ω–∞–ª –≤ –∫–∞–Ω–∞–ª–µ "A"
; sbrs R16, CANAL_B ; –ø–æ—Å–ª–µ–¥—é—é –ø—Ä–æ–≤–µ—Ä–∫—É –Ω–µ –æ–±—è–∑–∞—Ç–µ–ª—å–Ω–æ
rjmp ROTATE_RIGHT ; –ø–µ—Ä–µ—Ö–æ–¥ –µ—Å–ª–∏ —Å–∏–≥–Ω–∞–ª –≤ –∫–∞–Ω–∞–ª–µ "B"
rjmp LOOP –î–æ–±–∞–≤–ª–µ–Ω–æ after 44 minutes 2 seconds:–ù–æ –∞ –ø—Ä–æ–ø—É—Å–∫–∏ –≤—Å—ë —Ä–∞–≤–Ω–æ –µ—Å—Ç—å.. –°–¥–µ–ª–∞–ª 10 –ø–æ–ª–Ω—ã—Ö –æ–±–æ—Ä–æ—Ç–æ–≤ –≤ –æ–¥–Ω—É —Å—Ç–æ—Ä–æ–Ω—É, –ø–æ—Ç–æ–º –≤ –¥—Ä—É–≥—É—é —Å—Ç–æ–ª—å–∫–æ –∂–µ. –Ý–∞–∑–Ω–∏—Ü–∞ 15 —â–µ–ª—á–∫–æ–≤  –ù–æ –æ—Ç –Ω–∏—Ö –Ω–∏–∫—É–¥–∞ –Ω–µ –¥–µ—Ç—å—Å—è. –ï—Å–ª–∏ –æ–ø—Ä–æ—Å –ø–æ—Ä—Ç–∞ –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç –≤ —ç—Ç–æ—Ç –º–æ–º–µ–Ω—Ç, —Ç–æ –ø—Ä–æ–ø—É—Å–∫ –≥–∞—Ä–∞–Ω—Ç–∏—Ä–æ–≤–∞–Ω:  –ë–µ–∑ –ø—Ä–æ–ø—É—Å–∫–æ–≤ —Ç–æ–ª—å–∫–æ —á–µ—Ä–µ–∑ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è.. –ù–æ –µ—Å–ª–∏ "–ø—Ä–∏–±–æ—Ä—ã" –Ω–µ –ø–æ–¥–∫–ª—é—á–∞—Ç—å, –∞ —á–∏—Å—Ç–æ –ø–æ –æ—â—É—â–µ–Ω–∏—è–º, —Ç–æ –ø—Ä–æ–ø—É—Å–∫–∏ –Ω–µ –∑–∞–º–µ—Ç–Ω—ã
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–î—è–¥—è–í–æ–≤–∞–Ω
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Å—Å–µ–º–±–ª–µ—Ä (ASM) –¥–ª—è AVR –≤ –≤–æ–ø—Ä–æ—Å–∞—Ö –∏ –æ—Ç–≤–µ—Ç–∞—Ö –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –Ω–æ—è 20, 2024 14:32:31 |
|
| –ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º |
 |
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 110
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –æ–∫—Ç 25, 2020 22:13:25
–°–æ–æ–±—â–µ–Ω–∏–π: 418
–û—Ç–∫—É–¥–∞: –°–º–æ–ª–µ–Ω—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 1
|
|
–¢–æ–∂–µ –¥–µ–ª–∞–ª –æ–±—Ä–∞–±–æ—Ç–∫—É —ç–Ω–∫–æ–¥–µ—Ä–æ–≤ –≤ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–∏. –ù–æ —É –º–µ–Ω—è –∫—Ä–∏—Ç–∏—á–Ω–æ –ø–æ –≤—Ä–µ–º–µ–Ω–∏ –±—ã–ª–æ, –Ω–µ –º–æ–≥ —Å–µ–±–µ "–ø–æ–∑–≤–æ–ª–∏—Ç—å" –∫–∞–∫–∏—Ö-–ª–∏–±–æ –æ–∂–∏–¥–∞–Ω–∏–π –≤ —Ü–∏–∫–ª–µ.
–ü–æ–¥—É–º–∞–ª –Ω–∞–¥ –¥–∞–Ω–Ω—ã–º–∏, –ø–æ—Å—Ç—É–ø–∞—é—â–∏–º–∏ –æ—Ç —ç–Ω–∫–æ–¥–µ—Ä–∞, –∏ –æ—Ç–º–µ—Ç–∏–ª —Å–ª–µ–¥—É—é—â–µ–µ:
—Ç—Ä–∏ –ø–æ—Å–ª–µ–¥–æ–≤–∞—Ç–µ–ª—å–Ω—ã—Ö —Å–æ—Å—Ç–æ—è–Ω–∏—è –ø—Ä–µ–¥—Å—Ç–∞–≤–ª—è—é—Ç —Å–æ–±–æ–π –∫–æ–Ω—Å—Ç–∞–Ω—Ç—É, –∫–æ—Ç–æ—Ä–∞—è –æ–¥–Ω–æ–∑–Ω–∞—á–Ω–æ –æ–ø—Ä–µ–¥–µ–ª—è–µ—Ç –Ω–∞–ø—Ä–∞–≤–ª–µ–Ω–∏–µ –≤—Ä–∞—â–µ–Ω–∏—è
–ù–∞–ø—Ä–∏–º–µ—Ä:
01 -> 00 -> 10 = –ø–æ–≤–æ—Ä–æ—Ç –≤ –æ–¥–Ω—É —Å—Ç–æ—Ä–æ–Ω—É
10 -> 00 -> 01 = –ø–æ–≤–æ—Ä–æ—Ç –≤ –ø—Ä–æ—Ç–∏–≤–æ–ø–æ–ª–æ–∂–Ω—É—é —Å—Ç–æ—Ä–æ–Ω—É
–ü–æ—ç—Ç–æ–º—É —Å–æ—Ö—Ä–∞–Ω—è–ª –≤ –±–∞–π—Ç–µ —Ç—Ä–∏ –ø–æ—Å–ª–µ–¥–Ω–∏—Ö –∏–∑–º–µ–Ω–µ–Ω–∏—è –ø–∏–Ω–æ–≤ —ç–Ω–∫–æ–¥–µ—Ä–∞ (3 * 2–±–∏—Ç–∞ = 6–±–∏—Ç). –ò —Å—Ä–∞–≤–Ω–∏–≤–∞–ª —ç—Ç–∏ 6 –±–∏—Ç —Å –∫–æ–Ω—Å—Ç–∞–Ω—Ç–∞–º–∏ –ø–æ–≤–æ—Ä–æ—Ç–∞ –≤–ª–µ–≤–æ –∏ –≤–ø—Ä–∞–≤–æ.
PS –ü—Ä–µ—Ä—ã–≤–∞–Ω–∏–µ –Ω–µ –æ—Ç –ø–∏–Ω–æ–≤ —ç–Ω–∫–æ–¥–µ—Ä–∞, –ø–æ —Ç–∞–π–º–µ—Ä—É —á–µ—Ä–µ–∑ 500 –º–∫—Å, –ø—Ä–æ–ø—É—Å–∫–æ–≤ —Å–æ—Å—Ç–æ—è–Ω–∏—è —ç–Ω–∫–æ–¥–µ—Ä–æ–≤ (2 —à—Ç) –Ω–µ—Ç, –∞–Ω–∞–ª–∏–∑–∏—Ä—É–µ—Ç—Å—è –±—ã—Å—Ç—Ä–æ–µ –∏ –º–µ–¥–ª–µ–Ω–Ω–æ–µ –≤—Ä–∞—â–µ–Ω–∏–µ
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Ivanoff-iv
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Å—Å–µ–º–±–ª–µ—Ä (ASM) –¥–ª—è AVR –≤ –≤–æ–ø—Ä–æ—Å–∞—Ö –∏ –æ—Ç–≤–µ—Ç–∞—Ö –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –Ω–æ—è 20, 2024 15:09:35 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
 |
–ö–∞—Ä–º–∞: 52
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2114
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –Ω–æ—è 11, 2016 05:48:09
–°–æ–æ–±—â–µ–Ω–∏–π: 7065
–û—Ç–∫—É–¥–∞: –°–µ—Ä–¥—Ü–µ –ü–∞—Ä–º—ã
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 2
–ú–µ–¥–∞–ª–∏: 2
|
|
–Ø –ø—Ä–∏–º–µ–Ω—è–ª –¥–ª—è –±—ã—Å—Ç—Ä–æ–π –æ–±—Ä–∞–±–æ—Ç–∫–∏ —ç–Ω–∫–æ–¥–µ—Ä–∞ —Ç–∞–∫–æ–π –∫–æ–¥:
–æ—Ç —ç–Ω–∫–æ–¥–µ—Ä–∞ –µ—Å—Ç—å 2 –≤—Ö–æ–¥–∞, —è —Ä–∞–∑–º–µ—â–∞–ª –∏—Ö –≤ —Å–æ—Å–µ–¥–Ω–∏–µ —Ä–∞–∑—Ä—è–¥—ã –±–∏—Ç–∞, –∑–∞—Ç–µ–º –¥–µ–ª–∞–ª –º–ª–∞–¥—à–µ–º—É —Ä–∞–∑—Ä—è–¥—É XOR —Å–æ —Å—Ç–∞—Ä—à–∏–º, —Ä–µ–∑—É–ª—å—Ç–∞—Ç –∑–∞–ø–∏—Å—ã–≤–∞–ª –æ–±—Ä–∞—Ç–Ω–æ –≤ –º–ª–∞–¥—à–∏–π, –≤—Å—ë - —É –º–µ–Ω—è –ø–æ–ª—É—á–∞–ª—Å—è –æ–±—ã—á–Ω—ã–π —Å—á—ë—Ç, –∏ —Ç–µ–ø–µ—Ä—å —á—Ç–æ–±—ã —É–∑–Ω–∞—Ç—å, –∫—É–¥–∞ –ø–æ–≤–µ—Ä–Ω—É–ª—Å—è —ç–Ω–∫–æ–¥–µ—Ä, –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ –±—ã–ª–æ —ç—Ç–æ —Å–æ—Å—Ç–æ—è–Ω–∏–µ –≤—ã—á–µ—Å—Ç—å –∏–∑ –ø—Ä–µ–¥—ã–¥—É—â–µ–≥–æ - –µ—Å–ª–∏ —Ä–µ–∑—É–ª—å—Ç–∞—Ç 1 - –≤–ø—Ä–∞–≤–æ, –µ—Å–ª–∏ -1 - –≤–ª–µ–≤–æ, –µ—Å–ª–∏ 0 - —ç–Ω–∫–æ–¥–µ—Ä –Ω–µ —à–µ–≤–µ–ª–∏–ª—Å—è, –µ—Å–ª–∏ 2 –∏–ª–∏ -2 (—á—Ç–æ –ø—Ä–∏ 2—Ö–±–∏—Ç–Ω–æ–π –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π —Ç–æ–∂–¥–µ—Å—Ç–≤–µ–Ω–Ω–æ) - –∑–Ω–∞—á–∏—Ç —ç–Ω–∫–æ–¥–µ—Ä –∫—Ä—É—Ç–∞–Ω—É–ª–∏ —Å–ª–∏—à–∫–æ–º –±—ã—Å—Ç—Ä–æ...
–Ω—É, –∏ –Ω–æ–≤–æ–µ —Å–æ—Å—Ç–æ—è–Ω–∏–µ –Ω–µ –∑–∞–±—ã–≤–∞–µ–º —Å–æ—Ö—Ä–∞–Ω–∏—Ç—å, –¥–ª—è —Å–ª–µ–¥—É—é—â–µ–≥–æ –≤—ã—á–∏—Å–ª–µ–Ω–∏—è.
–ü–°: –∫–æ–¥ –±—ã–ª –Ω–∞ –° –Ω–∞–ø–∏—Å–∞–Ω, –Ω–æ —Å —É—á–µ—Ç–æ–º —Ç–æ–≥–æ, –∫–∞–∫ –æ–Ω–Ω–∞ –∞—Å—Å–µ–º–±–ª–µ—Ä —Ä–∞–∑–≤–µ—Ä–Ω—ë—Ç—Å—è –∏ –∫–æ–¥ –Ω–µ –ø–æ–¥ —Ä—É–∫–æ–π, –∞ —Ç–æ –±—ã –≤—ã–ª–æ–∂–∏–ª - —Ç–∞–º –µ—â—ë —Ç—Ä—é–∫–∏ –±—ã–ª–∏...
–ü–°2: —ç—Ç–æ –±—ã–ª –≤–æ–ª—å—Ç–º–µ—Ç—Ä –Ω–∞ —Å–µ–º–∏—Å–µ–≥–º–µ–Ω—Ç–Ω–∏–∫–∞—Ö –∏ –æ–ø—Ä–æ—Å —ç–Ω–∫–æ–¥–µ—Ä–∞ –≤—ã–∑—ã–≤–∞–ª—Å—è –ø–æ—Å–ª–µ –ø–µ—Ä–µ–∫–ª—é—á–µ–Ω–∏—è –¥–∏–Ω–∞–º–∏—á–µ—Å–∫–æ–π –∏–Ω–¥–∏–∫–∞—Ü–∏–∏...
_________________
–î–ª—è —Ç–µ—Ö, –∫—Ç–æ –Ω–µ —É—á–∏–ª –º–∞–≥–∏—é –º–∏—Ä –ø–æ–ª–æ–Ω —Ñ–∏–∑–∏–∫–∏
–ë–µ–∑–≥—Ä–∞–º–æ—Ç–Ω–æ –≤–æ–ø—Ä–æ—à–∞—é—â–∏–º –ø—Ä–æ —Å–∏–ª–æ–≤—É—é –∏–ª–∏ –≤—ã—Å–æ–∫–æ–≤–æ–ª—å—Ç–Ω—É—é —ç–ª–µ–∫—Ç—Ä–æ–Ω–∏–∫—É —è –Ω–µ –æ—Ç–≤–µ—á–∞—é, –∞ —Ç–æ –µ—â—ë –ø–æ—Å–∞–¥—è—Ç –∑–∞ —É—á–∞—Å—Ç–∏–µ –≤ (—Å–∞–º–æ)—É–±–∏–µ–Ω–∏–∏ –æ–±–æ–ª—Ç—É—Å–∞...
–ü–æ—Å–ª–µ–¥–Ω–∏–π —Ä–∞–∑ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞–ª–æ—Å—å Ivanoff-iv –°—Ä –Ω–æ—è 20, 2024 15:14:55, –≤—Å–µ–≥–æ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞–ª–æ—Å—å 1 —Ä–∞–∑.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
shonty
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Å—Å–µ–º–±–ª–µ—Ä (ASM) –¥–ª—è AVR –≤ –≤–æ–ø—Ä–æ—Å–∞—Ö –∏ –æ—Ç–≤–µ—Ç–∞—Ö –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –Ω–æ—è 20, 2024 15:15:32 |
|
| –ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º |
|
–ö–∞—Ä–º–∞: 1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 39
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —è–Ω–≤ 11, 2012 18:20:26
–°–æ–æ–±—â–µ–Ω–∏–π: 473
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–î—è–¥—è–í–æ–≤–∞–Ω –ø–∏—Å–∞–ª(–∞): –ù–æ —É –º–µ–Ω—è –∫—Ä–∏—Ç–∏—á–Ω–æ –ø–æ –≤—Ä–µ–º–µ–Ω–∏ –±—ã–ª–æ, –Ω–µ –º–æ–≥ —Å–µ–±–µ "–ø–æ–∑–≤–æ–ª–∏—Ç—å" –∫–∞–∫–∏—Ö-–ª–∏–±–æ –æ–∂–∏–¥–∞–Ω–∏–π –≤ —Ü–∏–∫–ª–µ. –ï—Å–ª–∏ –≤ —Ü–∏–∫–ª–µ —Ç–æ–ª—å–∫–æ –æ–ø—Ä–æ—Å –ø–æ—Ä—Ç–∞, —Ç–æ in - 1 —Ü–∏–∫–ª andi - 1 cpi - 1 breq - 1 –µ—Å–ª–∏ —É—Å–ª–æ–≤–∏—è –Ω–µ —Å–æ–±–ª—é–¥–µ–Ω—ã, 2 –µ—Å–ª–∏ —Å–æ–±–ª—é–¥–µ–Ω—ã –ò—Ç–æ–≥–æ 4..5 —Ü–∏–∫–ª–æ–≤. –î—É–º–∞—é —ç—Ç–æ –Ω–µ —Å—Ç–æ–ª—å –∫—Ä–∏—Ç–∏—á–Ω–æ. –ö—Ä–∏—Ç–∏—á–Ω—ã –∏–º–µ–Ω–Ω–æ –ø—Ä–æ–ø—É—Å–∫–∏. –ê –æ–Ω–∏ –ø—Ä–∏ –æ–ø—Ä–æ—Å–µ –Ω–µ–∏–∑–±–µ–∂–Ω—ã. –í—Å–µ–≥–æ –ø—Ä–∏ –æ–ø—Ä–æ—Å–µ –ø—Ä–æ–ø—É—Å–∫–æ–≤ –º–æ–∂–µ—Ç –±—ã—Ç—å –ø—Ä–∏–º–µ—Ä–Ω–æ —Ç—Ä–µ—Ç—å –æ—Ç –æ–±—â–µ–≥–æ –∫–æ–ª–∏—á–µ—Å—Ç–≤–∞ —â–µ–ª—á–∫–æ–≤. –û–ø—Ä–æ—Å –º–æ–∂–µ—Ç —Å–æ–≤–ø–∞—Å—Ç—å –∫–∞–∫ —Å –∑–µ–ª—ë–Ω–æ–π, —Ç–∞–∫ –∏ —Å –∫—Ä–∞—Å–Ω–æ–π –∑–æ–Ω–æ–π. –ê —ç—Ç–æ 2:1  –ù–∞ –ø—Ä–∞–∫—Ç–∏–∫–µ —Å–¥–µ–ª–∞–ª —ç–Ω–Ω–æ–µ –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ –æ–±–æ—Ä–æ—Ç–æ–≤:  –§–∏–∫—Å–∏—Ä–æ–≤–∞–ª –¥–æ –∏ –ø–æ—Å–ª–µ —ç—Ç–æ–≥–æ –∫–æ–¥–∞: –ö–æ–¥: sbis PIND, CANAL_A
rjmp pc-1 ; –∂–¥—ë–º –∫–æ–≥–¥–∞ –∫–∞–Ω–∞–ª "A" –¥–µ–∞–∫—Ç–∏–≤–∏—Ä—É–µ—Ç—Å—è
sbic PIND, CANAL_B
rjmp LOOP 0xEC —ç—Ç–æ 236 - –≤—Å–µ–≥–æ —â–µ–ª—á–∫–æ–≤ 0x97 —ç—Ç–æ 151 - —ç—Ç–æ —Å–∫–æ–ª—å–∫–æ —Å—Ä–∞–±–æ—Ç–∞–ª–æ (236/3)*2=157,33... –ø—Ä–∏–º–µ—Ä–Ω–æ —Ç–∞–∫ –∏ –µ—Å—Ç—å. –ü—Ä–∏ –æ–ø—Ä–æ—Å–µ —Å—Ä–∞–±–∞—Ç—ã–≤–∞–µ—Ç –ø—Ä–∏–º–µ—Ä–Ω–æ 2/3 —â–µ–ª—á–∫–æ–≤. –î–æ–±–∞–≤–ª–µ–Ω–æ after 2 minutes 53 seconds:shonty –ø–∏—Å–∞–ª(–∞): –ü—Ä–∏ –æ–ø—Ä–æ—Å–µ —Å—Ä–∞–±–∞—Ç—ã–≤–∞–µ—Ç –ø—Ä–∏–º–µ—Ä–Ω–æ 2/3 —â–µ–ª—á–∫–æ–≤. –°–æ—Ä—Ä–∏ –í –º–æ—ë–º –∫–æ–¥–µ —Å—Ä–∞–±–∞—Ç—ã–≤–∞–µ—Ç –ø—Ä–∏–º–µ—Ä–Ω–æ 2/3 —â–µ–ª—á–∫–æ–≤. –ù–æ —á–∏—Å—Ç–æ —Ç–∞–∫—Ç–∏–ª—å–Ω–æ –Ω–µ –æ—â—É—â–∞–µ—Ç—Å—è –∏ –º–µ–Ω—è —É—Å—Ç—Ä–∞–∏–≤–∞–µ—Ç
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Ivanoff-iv
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Å—Å–µ–º–±–ª–µ—Ä (ASM) –¥–ª—è AVR –≤ –≤–æ–ø—Ä–æ—Å–∞—Ö –∏ –æ—Ç–≤–µ—Ç–∞—Ö –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –Ω–æ—è 20, 2024 15:19:33 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
|
–ö–∞—Ä–º–∞: 52
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2114
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –Ω–æ—è 11, 2016 05:48:09
–°–æ–æ–±—â–µ–Ω–∏–π: 7065
–û—Ç–∫—É–¥–∞: –°–µ—Ä–¥—Ü–µ –ü–∞—Ä–º—ã
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 2
–ú–µ–¥–∞–ª–∏: 2
|
shonty, —á–µ–≥–æ —Ç–æ —è –Ω–µ –ø–æ–Ω—è–ª –≤–∞—Å, —è –ø–∏—Å–∞–ª –æ–ø—Ä–æ—Å –Ω–∞ 1 –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–∏ –ø–æ –∏–∑–º–µ–Ω–µ–Ω–∏—é –≤–Ω—É—Ç—Ä–∏ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è –ø—Ä–æ—Å—Ç–æ —Å—Ä–∞–≤–Ω–∏–≤–∞–ª —Å–æ—Å—Ç–æ—è–Ω–∏—è –≤—Ö–æ–¥–æ–≤ –±–µ–∑ –∫–∞–∫–∏—Ö –ª–∏–±–æ –æ–∂–∏–¥–∞–Ω–∏–π, –µ—Å–ª–∏ —Ä–∞–≤–Ω—ã - –ø–æ–ª—Ü–∏–∫–ª–∞ –≤–ø—Ä–∞–≤–æ, –∏–Ω–∞—á–µ - –ø–æ–ª—Ü–∏–∫–ª–∞ –≤–ª–µ–≤–æ –∏ –Ω–∏ –∫–∞–∫–∏—Ö 2/3 –ø—Ä–æ–ø—É—Å–∫–æ–≤ –Ω–µ –±—ã–ª–æ... –°–ø–æ–π–ª–µ—Ä
| –í–ª–æ–∂–µ–Ω–∏—è: |
 3lz295ln04.png [12.54 KiB]
3lz295ln04.png [12.54 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 165
|
_________________
–î–ª—è —Ç–µ—Ö, –∫—Ç–æ –Ω–µ —É—á–∏–ª –º–∞–≥–∏—é –º–∏—Ä –ø–æ–ª–æ–Ω —Ñ–∏–∑–∏–∫–∏
–ë–µ–∑–≥—Ä–∞–º–æ—Ç–Ω–æ –≤–æ–ø—Ä–æ—à–∞—é—â–∏–º –ø—Ä–æ —Å–∏–ª–æ–≤—É—é –∏–ª–∏ –≤—ã—Å–æ–∫–æ–≤–æ–ª—å—Ç–Ω—É—é —ç–ª–µ–∫—Ç—Ä–æ–Ω–∏–∫—É —è –Ω–µ –æ—Ç–≤–µ—á–∞—é, –∞ —Ç–æ –µ—â—ë –ø–æ—Å–∞–¥—è—Ç –∑–∞ —É—á–∞—Å—Ç–∏–µ –≤ (—Å–∞–º–æ)—É–±–∏–µ–Ω–∏–∏ –æ–±–æ–ª—Ç—É—Å–∞...
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–î—è–¥—è–í–æ–≤–∞–Ω
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Å—Å–µ–º–±–ª–µ—Ä (ASM) –¥–ª—è AVR –≤ –≤–æ–ø—Ä–æ—Å–∞—Ö –∏ –æ—Ç–≤–µ—Ç–∞—Ö –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –Ω–æ—è 20, 2024 15:25:49 |
|
| –ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º |
|
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 110
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –æ–∫—Ç 25, 2020 22:13:25
–°–æ–æ–±—â–µ–Ω–∏–π: 418
–û—Ç–∫—É–¥–∞: –°–º–æ–ª–µ–Ω—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
Ivanoff-iv –ø–∏—Å–∞–ª(–∞): –∏ –Ω–∏ –∫–∞–∫–∏—Ö 2/3 –ø—Ä–æ–ø—É—Å–∫–æ–≤ –Ω–µ –±—ã–ª–æ –Ø —Ç–æ–∂–µ –Ω–µ –ø–æ–Ω—è–ª –ø—Ä–æ 2/3. –£ –º–µ–Ω—è —Ä–∞–±–æ—Ç–∞–µ—Ç –±–µ–∑ –ø—Ä–æ–ø—É—Å–∫–æ–≤. –ü—Ä–µ—Ä—ã–≤–∞–Ω–∏–µ —á–µ—Ä–µ–∑ 500 –º–∫—Å, –¥–≤–∞ —ç–Ω–∫–æ–¥–µ—Ä–∞ –æ–ø—Ä–∞—à–∏–≤–∞—é—Ç—Å—è –ø–æ –æ—á–µ—Ä–µ–¥–∏, —Å–Ω–∞—á–∞–ª–∞ 1–π, –ø—Ä–∏ —Å–ª–µ–¥—É—é—â–µ–º –≤—Ö–æ–¥–µ –≤ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–µ 2-–π. –ü–æ–ª—É—á–∞–µ—Ç—Å—è –∫–∞–∂–¥—ã–π —ç–Ω–∫–æ–¥–µ—Ä –æ–ø—Ä–∞—à–∏–≤–∞–µ—Ç—Å—è —Å –∏–Ω—Ç–µ—Ä–≤–∞–ª–æ–º 1 –º—Å. –°–æ—Ö—Ä–∞–Ω—è–µ—Ç—Å—è —Ç–æ–ª—å–∫–æ –∏–∑–º–µ–Ω–µ–Ω–∏–µ —Å–æ—Å—Ç–æ—è–Ω–∏—è –ø–æ —Å—Ä–∞–≤–Ω–µ–Ω–∏—é —Å –ø—Ä–µ–¥—ã–¥—É—â–∏–º.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
shonty
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Å—Å–µ–º–±–ª–µ—Ä (ASM) –¥–ª—è AVR –≤ –≤–æ–ø—Ä–æ—Å–∞—Ö –∏ –æ—Ç–≤–µ—Ç–∞—Ö –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –Ω–æ—è 20, 2024 15:28:04 |
|
| –ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º |
|
–ö–∞—Ä–º–∞: 1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 39
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —è–Ω–≤ 11, 2012 18:20:26
–°–æ–æ–±—â–µ–Ω–∏–π: 473
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–î–∞ –≤—Å—ë –Ω–æ—Ä–º–∞–ª—å–Ω–æ. –£ –≤–∞—Å –Ω–∞ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è—Ö –∂–µ. –ê —É –º–µ–Ω—è –ø–æ–ª–Ω–æ—Å—Ç—å—é –±–µ–∑ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–π. –ü–æ—ç—Ç–æ–º—É –ø—É—Å—Ç—ã–µ —Å—Ä–∞–±–∞—Ç—ã–≤–∞–Ω–∏—è –∏–∑ –∫—Ä–∞—Å–Ω–æ–π –∑–æ–Ω—ã.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Adrift
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Å—Å–µ–º–±–ª–µ—Ä (ASM) –¥–ª—è AVR –≤ –≤–æ–ø—Ä–æ—Å–∞—Ö –∏ –æ—Ç–≤–µ—Ç–∞—Ö –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –Ω–æ—è 20, 2024 15:28:16 |
|
| –ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º |
–ö–∞—Ä–º–∞: 1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 52
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –æ–∫—Ç 01, 2024 15:22:33
–°–æ–æ–±—â–µ–Ω–∏–π: 492
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–£ –º–µ–Ω—è –Ω–∞ STM32 –µ–Ω–∫–æ–¥–µ—Ä –Ω–∞ —Ç–∞–π–º–µ—Ä–µ –≤–∏—Å–∏—Ç, —Ç–∞–º –∞–ø–ø–∞—Ä–∞—Ç–Ω–∞—è —Ñ–∏–ª—å—Ç—Ä–∞—Ü–∏—è –∏ –≤—Å–µ —Ä–∞–≤–Ω–æ –±—ã–≤–∞—é—Ç —Å–±–æ–∏. –õ–µ—á–∏—Ç—Å—è –∑–∞–¥–µ—Ä–∂–∫–æ–π ~1ms –º–µ–∂–¥—É –æ–ø—Ä–æ—Å–∞–º–∏.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–î—è–¥—è–í–æ–≤–∞–Ω
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Å—Å–µ–º–±–ª–µ—Ä (ASM) –¥–ª—è AVR –≤ –≤–æ–ø—Ä–æ—Å–∞—Ö –∏ –æ—Ç–≤–µ—Ç–∞—Ö –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –Ω–æ—è 20, 2024 15:38:21 |
|
| –ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º |
|
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 110
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –æ–∫—Ç 25, 2020 22:13:25
–°–æ–æ–±—â–µ–Ω–∏–π: 418
–û—Ç–∫—É–¥–∞: –°–º–æ–ª–µ–Ω—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–õ–µ—á–∏—Ç—Å—è –∑–∞–¥–µ—Ä–∂–∫–æ–π ~1ms –º–µ–∂–¥—É –æ–ø—Ä–æ—Å–∞–º–∏. –ù–µ—Ç —Å–º—ã—Å–ª–∞ –æ–ø—Ä–∞—à–∏–≤–∞—Ç—å —ç–Ω–∫–æ–¥–µ—Ä —á–∞—â–µ, —á–µ–º —á–µ—Ä–µ–∑ 1 –º—Å (–∫–æ–Ω–µ—á–Ω–æ, –ø—Ä–∏ —É—Å–ª–æ–≤–∏–∏ –µ–≥–æ –≤—Ä–∞—â–µ–Ω–∏—è –ø–∞–ª—å—Ü–∞–º–∏, –∞ –Ω–µ –º–æ—Ç–æ—Ä—á–∏–∫–æ–º)
–ü–æ—Å–ª–µ–¥–Ω–∏–π —Ä–∞–∑ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞–ª–æ—Å—å –î—è–¥—è–í–æ–≤–∞–Ω –°—Ä –Ω–æ—è 20, 2024 15:41:31, –≤—Å–µ–≥–æ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞–ª–æ—Å—å 1 —Ä–∞–∑.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
veso74
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Å—Å–µ–º–±–ª–µ—Ä (ASM) –¥–ª—è AVR –≤ –≤–æ–ø—Ä–æ—Å–∞—Ö –∏ –æ—Ç–≤–µ—Ç–∞—Ö –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –Ω–æ—è 20, 2024 15:40:38 |
|
–ö–∞—Ä–º–∞: 25
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 498
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –º–∞–π 05, 2012 20:24:52
–°–æ–æ–±—â–µ–Ω–∏–π: 1859
–û—Ç–∫—É–¥–∞: KN34PC, –ë–æ–ª–≥–∞—Ä–∏—è
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 1
|
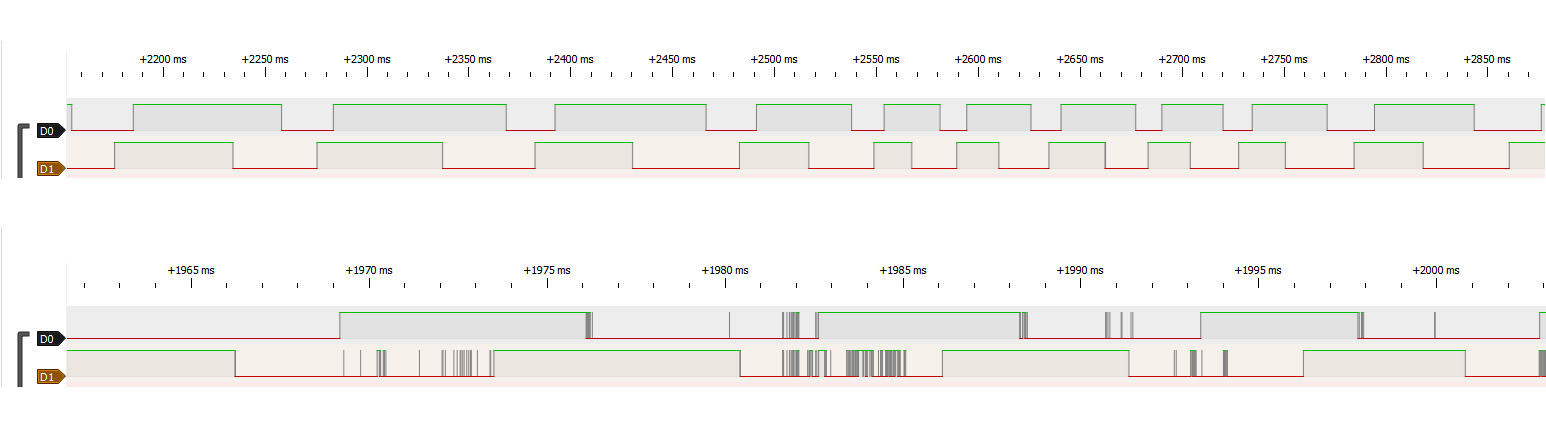
–ß–µ—Ä–µ–∑ –æ—á–µ–Ω—å –∫–æ—Ä–æ—Ç–∫–æ–µ –≤—Ä–µ–º—è (–Ω–∞–ø—Ä. –Ω–µ–¥–µ–ª–∏ .. –Ω–µ—Å–∫–æ–ª—å–∫–æ –º–µ—Å—è—Ü–µ–≤) –º–µ–Ω—è–µ—Ç—Å—è —Å–æ—Å—Ç–æ—è–Ω–∏–µ –∫–æ–Ω—Ç–∞–∫—Ç–æ–≤ –º–µ—Ö–∞–Ω–∏—á–µ—Å–∫–æ–≥–æ —ç–Ω–∫–æ–¥–µ—Ä–∞. –ö–æ–Ω—Ç–∞–∫—Ç—ã –∑–∞–≥—Ä—è–∑–Ω—è—é—Ç—Å—è, –∏–∑–Ω–∞—à–∏–≤–∞—é—Ç—Å—è –∏ —Ç.–¥. –ù–µ–ø—Ä–∞–≤–∏–ª—å–Ω—ã–µ –≤—ã—Ö–æ–¥–Ω—ã–µ —Å–∏–≥–Ω–∞–ª—ã —Å–æ–∑–¥–∞—é—Ç "–±–µ—Å–ø–æ—Ä—è–¥–æ–∫" –æ—Ç –∫–∞–∫–æ–≥–æ-—Ç–æ –∏–∑–±—ã—Ç–æ—á–Ω–æ–≥–æ –∏–º–ø—É–ª—å—Å–∞ –¥–æ –Ω–µ–ø—Ä–∞–≤–∏–ª—å–Ω–∞—è —Ä–µ–∞–∫—Ü–∏—è –≤–ø–µ—Ä–µ–¥/–Ω–∞–∑–∞–¥. –°–∏–≥–Ω–∞–ª –Ω–∏–∂–µ: —ç–Ω–∫–æ–¥–µ—Ä –Ω–∞ –ø—Ä–∏–º–µ—Ä–Ω–æ 1-2 –≥–æ–¥–∞ –≤ —Å–∏–Ω—Ç–µ–∑–∞—Ç–æ—Ä —á–∞—Å—Ç–æ—Ç—ã ham-—Ä–∞–¥–∏–æ. –ö–æ–Ω–¥–µ–Ω—Å–∞—Ç–æ—Ä—ã –æ—Ç—á–∞—Å—Ç–∏ –ø–æ–º–æ–≥–∞—é—Ç, –Ω–æ "–∑–∞–º–µ–¥–ª–∏—Ç—å" —Ä–µ–∞–∫—Ü–∏—é. –î–æ–±–∞–≤—å—Ç–µ –º–∞—Ç–µ–º–∞—Ç–∏—á–µ—Å–∫—É—é –æ–±—Ä–∞–±–æ—Ç–∫—É. –ü–æ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—é –∏–ª–∏ –≤ —Ü–∏–∫–ª–µ –Ω–µ—Ç –∑–Ω–∞—á–µ–Ω–∏–∏. –ù–∏–∫–∞–∫–∏—Ö –¥–æ–ø. –∑–∞–¥–µ—Ä–∂–µ–∫ –≤ –∫–æ–¥–µ –¥–ª—è debounce. –ü—Ä–∏–º–µ—Ä: Rotary –Ω–∞ Ben Buxton - state machine. –õ—É—á—à–µ–≥–æ "–ª–µ—á–µ–Ω–∏—è" –º–µ—Ö. –µ–Ω–∫–æ–¥–µ—Ä–∞ –ø–æ–∫–∞ –Ω–µ –Ω–∞—à–æ–ª. –ï–Ω–∫–æ–¥–µ—Ä—ã —Ä–∞–±–æ—Ç–∞—é—Ç –≥–æ–¥–∞–º–∏, –Ω–∞–ø—Ä. –≤ VFO: DDS –∏–ª–∏ PLL –≤ –∫–∞—á–µ—Å—Ç–≤–µ –æ—Å–Ω–æ–≤–Ω–æ–≥–æ –∫–æ–º–ø–æ–Ω–µ–Ω—Ç–∞ –Ω–∞—Å—Ç—Ä–æ–π–∫–∏, –±–∞–∑–æ–≤–æ–µ —Ä–∞–¥–∏–æ. –ü—Ä–æ—Å—Ç–æ –µ—Å–ª–∏ –∑—É–± –µ–Ω–∫–æ–¥–µ—Ä–∞ –ø–æ–≤—Ä–µ–∂–¥–µ–Ω, –ø–æ–∑–∏—Ü–∏—è –ø—Ä–æ–ø—É—Å–∫–∞–µ—Ç—Å—è. –ü—Ä–∏ –≤—Ç–æ—Ä–æ–º –∑—É–±–µ - —Ç–æ–∂–µ –ø—Ä–æ–ø—É—Å–∫–∞–µ—Ç. –ù–∞ 3-–º –ø–æ—Ç–µ—Ä—è–Ω–Ω–æ–º –∑—É–±–µ - –º–µ–Ω—è—é —ç–Ω–∫–æ–¥–µ—Ä . –ü–æ—Ä—Ç–∏—Ä–æ–≤–∞–ª –º–µ—Ç–æ–¥ –Ω–∞ –Ω–µ—Å–∫–æ–ª—å–∫–æ —Ç–∏–ø–∞ –ú–ö: –æ—Ç Arduino –∫ "—á–∏—Å—Ç—ã–π" AVR, PIC, STM8/32 –∏ –¥—Ä. –í–µ–∑–¥–µ —Ä–∞–±–æ—Ç–∞ –±–µ–∑—É–ø—Ä–µ—á–Ω–∞—è. –í –ø–µ—Ä–µ—Ä—ã–≤–µ, –≤ —Ü–∏–∫–ª–µ, –±–µ–∑ –ø—Ä–æ–±–ª–µ–º. –ö–æ–Ω–¥–µ–Ω—Å–∞—Ç–æ—Ä—ã –Ω–µ—Ç. –î–∞–∂–µ –∞–ø–ø–∞—Ä–∞—Ç–Ω–∞—è –æ–±—Ä–∞–±–æ—Ç–∫–∞ –≤ STM32 —Å —ç—Ç–æ–π –ø—Ä–æ–±–ª–µ–º–æ–π –Ω–µ —Å–ø—Ä–∞–≤–∏–ª–∞—Å—å, –Ω–∏ –ø—Ä–∏ –∫–∞–∫–∏—Ö –Ω–∞—Å—Ç—Ä–æ–π–∫–∞—Ö. –ò —Ç–∞–º "—Å–ª–æ–º–∞–Ω–Ω—ã–π –∫–æ–¥–µ—Ä" /–∏ –µ–≥–æ –Ω–µ–¥–æ—Å—Ç–∞—Ç–∫–∏/ –∑–∞—Å—Ç–∞–≤–∏–ª –º–µ–Ω—è –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –º–µ—Ç–æ–¥. –ê–ø–ø–∞—Ä–∞—Ç–Ω—É—é —á–∞—Å—Ç—å —Ç–∞–º –æ—Å—Ç–∞–≤–∏–ª –¥–ª—è –æ–ø—Ç. —ç–Ω–∫–æ–¥–µ—Ä. (—á–∞—Å—Ç–∏—á–Ω–æ –ø–æ–ª—å–∑—É—é—Å—å –ø–µ—Ä–µ–≤–æ–¥—á–∏–∫–æ–º –ë–ì-–Ý–£) –µ–Ω–∫–æ–¥–µ—Ä KY-040 –∫ –ª–æ–≥. –∞–Ω–∞–ª–∏–∑–∞—Ç–æ—Ä: - –Ω–æ–≤—ã–π –∫–æ–¥–µ—Ä - –≤ —ç–∫—Å–ø–ª—É–∞—Ç–∞—Ü–∏–∏ /1-2-3 –≥–æ–¥–∞/ 
–ü–æ—Å–ª–µ–¥–Ω–∏–π —Ä–∞–∑ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞–ª–æ—Å—å veso74 –°—Ä –Ω–æ—è 20, 2024 16:07:00, –≤—Å–µ–≥–æ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞–ª–æ—Å—å 6 —Ä–∞–∑(–∞).
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Adrift
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê—Å—Å–µ–º–±–ª–µ—Ä (ASM) –¥–ª—è AVR –≤ –≤–æ–ø—Ä–æ—Å–∞—Ö –∏ –æ—Ç–≤–µ—Ç–∞—Ö –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –Ω–æ—è 20, 2024 15:49:36 |
|
| –ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º |
–ö–∞—Ä–º–∞: 1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 52
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –æ–∫—Ç 01, 2024 15:22:33
–°–æ–æ–±—â–µ–Ω–∏–π: 492
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–î—è–¥—è–í–æ–≤–∞–Ω, —Ç–∞–º –∞–ø–ø–∞—Ä–∞—Ç–Ω–∞—è –ø–æ–¥–¥–µ—Ä–∂–∫–∞, —Ç–∞–π–º–µ—Ä —Å–∞–º —Å—á–∏—Ç–∞–µ—Ç –≤ –æ–¥–Ω—É –∏–ª–∏ –¥—Ä—É–≥—É—é —Å—Ç–æ—Ä–æ–Ω—É, —Å —Ñ–∏–ª—å—Ç—Ä–∞—Ü–∏–µ–π, –ø–æ—Ç–æ–º—É –Ω–µ—Ç –Ω–∏ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–π –ø–æ –∏–∑–º–µ–Ω–µ–Ω–∏—é —É—Ä–æ–≤–Ω—è –Ω–∞ –ø–∏–Ω–∞—Ö, –Ω–∏ –ø—Ä–æ—Å—Ç–æ –ø–µ—Ä–∏–æ–¥–∏—á–µ—Å–∫–∏—Ö. –ú–æ–∂–Ω–æ –≤ –ª—é–±–æ–π –º–æ–º–µ–Ω—Ç –ø—Ä–æ—á–∏—Ç–∞—Ç—å –∑–Ω–∞—á–µ–Ω–∏–µ —Å—á–µ—Ç—á–∏–∫–∞ –∏ –ø–æ–ª—É—á–∏—Ç—å —Ä–∞–∑–Ω–∏—Ü—É –ø–æ —Å—Ä–∞–≤–Ω–µ–Ω–∏—é —Å –ø—Ä–æ—à–ª—ã–º —Ä–∞–∑–æ–º, –Ω–æ –µ—Å–ª–∏ –º–µ–∂–¥—É –æ–ø—Ä–æ—Å–∞–º–∏ –Ω–µ–±–æ–ª—å—à–∞—è –∑–∞–¥–µ—Ä–∂–∫–∞, —Ç–æ —Ä–∞–±–æ—Ç–∞–µ—Ç –Ω–µ –ª—É—á—à–∏–º –æ–±—Ä–∞–∑–æ–º, –ø–æ—Ç–æ–º—É —è –ø—Ä–æ—Å—Ç–æ –≤—ã—Ö–æ–∂—É –∏–∑ —Ñ—É–Ω–∫—Ü–∏–∏ –µ—Å–ª–∏ –ø—Ä–æ—à–ª–æ –º–µ–Ω—å—à–µ 1ms.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
|
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 383 –∏–∑ 399
|
[ –°–æ–æ–±—â–µ–Ω–∏–π: 7972 ] |
... , , , , , , ... |
–ö—Ç–æ —Å–µ–π—á–∞—Å –Ω–∞ —Ñ–æ—Ä—É–º–µ |
–°–µ–π—á–∞—Å —ç—Ç–æ—Ç —Ñ–æ—Ä—É–º –ø—Ä–æ—Å–º–∞—Ç—Ä–∏–≤–∞—é—Ç: –Ω–µ—Ç –∑–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω–Ω—ã—Ö –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª–µ–π –∏ –≥–æ—Å—Ç–∏: 28 |
|
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –Ω–∞—á–∏–Ω–∞—Ç—å —Ç–µ–º—ã
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –æ—Ç–≤–µ—á–∞—Ç—å –Ω–∞ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ —É–¥–∞–ª—è—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –¥–æ–±–∞–≤–ª—è—Ç—å –≤–ª–æ–∂–µ–Ω–∏—è
|
|
|