–§–æ—Ä—É–º –Ý–∞–¥–∏–æ–ö–æ—Ç • –ü—Ä–æ—Å–º–æ—Ç—Ä —Ç–µ–º—ã - –Ý–∞–±–æ—Ç–∞ —Å –ñ–ö–ò –Ω–∞ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ HD44780 –∏ –µ–≥–æ –∞–Ω–∞–ª–æ–≥–∞—Ö
–°–æ–æ–±—â–µ–Ω–∏—è –±–µ–∑ –æ—Ç–≤–µ—Ç–æ–≤ | –ê–∫—Ç–∏–≤–Ω—ã–µ —Ç–µ–º—ã
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 97 –∏–∑ 122
[ –°–æ–æ–±—â–µ–Ω–∏–π: 2431 ]
... , , , , , , ...
–ê–≤—Ç–æ—Ä
–°–æ–æ–±—â–µ–Ω–∏–µ
Albert_V
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–∞–±–æ—Ç–∞ —Å –ñ–ö–ò –Ω–∞ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ HD44780 –∏ –µ–≥–æ –∞–Ω–∞–ª–æ–≥–∞—Ö
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –∞–≤–≥ 05, 2015 20:13:05
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 90
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1859
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç —Å–µ–Ω 12, 2013 00:54:12–°–æ–æ–±—â–µ–Ω–∏–π: 4119–û—Ç–∫—É–¥–∞: –ó–∞–ú–ö–ê–î—å–µ. –¢–∞–º, –≥–¥–µ –¶–£–ü
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 5
amd9800 –ø–∏—Å–∞–ª(–∞):
–≠—Ç–æ –∞–Ω–∞–ª–æ–≥–æ–≤–∞—è –∫–ª–∞–≤–∏–∞—Ç—É—Ä–∞....
–ü—Ä–∏ –æ—Ç–ø—É—Å–∫–∞–Ω–∏–∏ B3, –ø—Ä–∏ –æ—Ü–∏—Ñ—Ä–æ–≤–∫–µ, –≤—ã —Ñ–∞–∫—Ç–∏—á–µ—Å–∫–∏ –¥–∞—ë—Ç–µ –∫–æ–º–∞–Ω–¥—É 74HC595 –Ω–∞ –∑–∞–≥—Ä—É–∑–∫—É –¥–∞–Ω–Ω—ã—Ö –≤ –≤—ã—Ö–æ–¥–Ω–æ–π —Ä–µ–≥–∏—Å—Ç—Ä.
–í—ã —É–≤–µ—Ä–µ–Ω—ã —á—Ç–æ —ç—Ç–æ –ø—Ä–∞–≤–∏–ª—å–Ω–æ?
----
P.S.
–ù–∞ –º–æ–π –≤–∑–≥–ª—è–¥, —Ä–∞–±–æ—Ç–∞ —Å—Ö–µ–º—ã –Ω–∞ –≥—Ä–∞–Ω–∏ —Ñ–æ–ª–∞.
–Ø –±—ã –Ω–µ —ç–∫–æ–Ω–æ–º–∏–ª –≤—ã–≤–æ–¥—ã –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞ (–µ—Å–ª–∏ –Ω—É–∂–Ω–æ —Å–¥–µ–ª–∞—Ç—å –Ω–∞–¥—ë–∂–Ω–æ–µ –∏–∑–¥–µ–ª–∏–µ).
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
amd9800
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–∞–±–æ—Ç–∞ —Å –ñ–ö–ò –Ω–∞ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ HD44780 –∏ –µ–≥–æ –∞–Ω–∞–ª–æ–≥–∞—Ö
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –∞–≤–≥ 05, 2015 20:23:48
–ö–∞—Ä–º–∞: -3
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 13
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –∏—é–Ω 02, 2013 12:23:03–°–æ–æ–±—â–µ–Ω–∏–π: 822
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
Albert_V –ø–∏—Å–∞–ª(–∞):
–ü—Ä–∏ –æ—Ç–ø—É—Å–∫–∞–Ω–∏–∏ B3, –ø—Ä–∏ –æ—Ü–∏—Ñ—Ä–æ–≤–∫–µ, –≤—ã —Ñ–∞–∫—Ç–∏—á–µ—Å–∫–∏ –¥–∞—ë—Ç–µ –∫–æ–º–∞–Ω–¥—É 74HC595 –Ω–∞ –∑–∞–≥—Ä—É–∑–∫—É –¥–∞–Ω–Ω—ã—Ö –≤ –≤—ã—Ö–æ–¥–Ω–æ–π —Ä–µ–≥–∏—Å—Ç—Ä.
–î–µ–ª–∞–ª –∏—Å–ø—ã—Ç–∞–Ω–∏—è –∏ –≤—Å–µ –ø—Ä–µ–∫—Ä–∞—Å–Ω–æ.
–î–µ–ª–æ –≤ —Ç–æ–º —á—Ç–æ –≤ –º–æ–º–µ–Ω—Ç –æ—Ü–∏—Ñ—Ä–æ–≤–∫–∏ –∑–∞–ø—Ä–µ—â–µ–Ω–∞ –ø–µ—Ä–µ–¥–∞—á–∞ –¥–∞–Ω–Ω—ã—Ö –≤ —Ä–µ–≥–∏—Å—Ç—Ä—ã.
–ü–æ—ç—Ç–æ–º—É –¥–∞–Ω–Ω—ã–µ –Ω–∞ –≤—ã–≤–æ–¥—ã –Ω–µ –±—É–¥—É—Ç –º–µ–Ω—è—Ç—å—Å—è.
–ú—ã –º–æ–∂–µ–º —Ö–æ—Ç—å 100 —Ä–∞–∑ –¥–µ—Ä–≥–∞—Ç—å —ç—Ç–æ–π –Ω–æ–≥–æ–π –∞ –¥–∞–Ω–Ω—ã–µ —Ç–∞–∫ –∏ –æ—Å—Ç–∞–Ω—É—Ç—Å—è.
–í–æ—Ç –µ—Å–ª–∏ —è –±—ã –ø–µ—Ä–µ–¥–∞–≤–∞–ª –¥–∞–Ω–Ω—ã–µ –≤ –º–æ–º–µ–Ω—Ç –æ—Ü–∏—Ñ—Ä–æ–≤–∫–∏ —ç—Ç–æ –±—ã–ª–æ –±—ã —É–∂–∞—Å–Ω–æ.
–ù–∏–∂–µ –±–∏–±–ª–∏–æ—Ç–µ–∫–∞ —Ä–∞–±–æ—Ç—ã —Å –®–∏–Ω–æ–π –ø–µ—Ä–µ–¥–∞—á–∏ –¥–∞–Ω–Ω—ã—Ö –¥–ª—è —ç—Ç–∏—Ö —ç–∫—Ä–∞–Ω–æ–≤
—ç–∫—Ä–∞–Ω—ã –º–æ–≥—É—Ç –±—ã—Ç—å 2—Ö —Ç–∏–ø–æ–≤
1-LCD(HD44780) - —É–ø—Ä–∞–≤–ª—è–µ—Ç—Å—è –æ–¥–Ω–∏–º —Ä–µ–≥–∏—Å—Ç—Ä–æ–º 595
2-LED (7 —Å–µ–º–∏—Å–µ–≥–º–µ–Ω—Ç–Ω–∏–∫ –¥–æ 4digit) - —É–ø—Ä–∞–≤–ª—è–µ—Ç—Å—è –¥–≤—É–º—è —Ä–µ–≥–∏—Å—Ç—Ä–∞–º–∏ 595
–°–ø–æ–π–ª–µ—Ä –ö–æ–¥:
/* ************************************************************************** */
–±–∏–±–ª–∏–æ—Ç–µ–∫–∞ LCD –¥–∏—Å–ø–ª–µ—è
–°–ø–æ–π–ª–µ—Ä –ö–æ–¥:
#ifndef _BUS_LCD_DISPLAY_INCLUDED
–ë–∏–±–ª–∏–æ—Ç–µ–∫–∞ LED –¥–∏—Å–ø–ª–µ—è
–°–ø–æ–π–ª–µ—Ä –ö–æ–¥:
#ifndef _BUS_LED_DISPLAY_INCLUDED
–ü–æ—Å–ª–µ–¥–Ω–∏–π —Ä–∞–∑ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞–ª–æ—Å—å amd9800 –°—Ä –∞–≤–≥ 05, 2015 20:30:57, –≤—Å–µ–≥–æ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞–ª–æ—Å—å 1 —Ä–∞–∑.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
Albert_V
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–∞–±–æ—Ç–∞ —Å –ñ–ö–ò –Ω–∞ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ HD44780 –∏ –µ–≥–æ –∞–Ω–∞–ª–æ–≥–∞—Ö
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –∞–≤–≥ 05, 2015 20:27:26
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 90
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1859
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç —Å–µ–Ω 12, 2013 00:54:12–°–æ–æ–±—â–µ–Ω–∏–π: 4119–û—Ç–∫—É–¥–∞: –ó–∞–ú–ö–ê–î—å–µ. –¢–∞–º, –≥–¥–µ –¶–£–ü
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 5
–≠—Ç–æ –≤–∞—à–µ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–æ. –°–º–æ—Ç—Ä–∏—Ç–µ —Å–∞–º–∏....
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
amd9800
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–∞–±–æ—Ç–∞ —Å –ñ–ö–ò –Ω–∞ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ HD44780 –∏ –µ–≥–æ –∞–Ω–∞–ª–æ–≥–∞—Ö
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –∞–≤–≥ 05, 2015 20:31:54
–ö–∞—Ä–º–∞: -3
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 13
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –∏—é–Ω 02, 2013 12:23:03–°–æ–æ–±—â–µ–Ω–∏–π: 822
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–Ø –≤–∞—Å –ø—Ä–µ–∫—Ä–∞—Å–Ω–æ –ø–æ–Ω–∏–º–∞—é. –ù—É –¥–ª—è –∫–ª–∞–≤—ã –≤—Å–µ–≥–¥–∞ –º–æ–∂–Ω–æ –±—É–¥–µ—Ç –≤—ã–¥–µ–ª–∏—Ç—å –æ–¥–∏–Ω –ø—Ä–æ–≤–æ–¥.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Rtmip
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–∞–±–æ—Ç–∞ —Å –ñ–ö–ò –Ω–∞ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ HD44780 –∏ –µ–≥–æ –∞–Ω–∞–ª–æ–≥–∞—Ö
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –∞–≤–≥ 06, 2015 02:25:36
–î–µ—Ä–∂–∏—Ç –ø–∞—è–ª—å–Ω–∏–∫ —Ö–≤–æ—Å—Ç–æ–º
–ö–∞—Ä–º–∞: 10
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 161
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –∞–ø—Ä 03, 2014 23:16:55–°–æ–æ–±—â–µ–Ω–∏–π: 963–û—Ç–∫—É–¥–∞: –Ý–æ—Å—Å–∏—è
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
amd9800 –ø–∏—Å–∞–ª(–∞):
...{CLOCK=250kHz}...
–í–æ—Ç —ç—Ç–æ –∑–Ω–∞—á–µ–Ω–∏–µ –ø—Ä–æ–±—É–π—Ç–µ –∏–∑–º–µ–Ω–∏—Ç—å –∏ —Ç–µ—Å—Ç–∏—Ä—É–π—Ç–µ, –º–æ–∂–µ—Ç –ø–æ–º–æ—á—å.
–ú–Ω–µ –∏–Ω–æ–≥–¥–∞ –ø—Ä–∏—Ö–æ–¥–∏–ª–æ—Å—å —Å—Ç–∞–≤–∏—Ç—å 300-350 –∫–ì—Ü –¥–ª—è —Å–∏–º—É–ª—è—Ü–∏–∏.
–ü–æ –ø–æ–≤–æ–¥—É –±–∏–±–ª–∏–æ—Ç–µ–∫–∏ LCD, –ø–æ—á–µ–º—É –Ω–µ —Ö–æ—Ç–∏—Ç–µ —Å–¥–µ–ª–∞—Ç—å "—É–Ω–∏–≤–µ—Ä—Å–∞–ª—å–Ω–æ", —Ç.–µ. –Ω–µ —Ç–æ–ª—å–∫–æ –ø–∏—Å–∞—Ç—å –≤ –¥–∏—Å–ø–ª–µ–π, –Ω–æ –∏ —á–∏—Ç–∞—Ç—å –¥–∏—Å–ø–ª–µ–π?
–¢–æ–≥–¥–∞ –∏ –≥–ª—é–∫–æ–≤ –º–µ–Ω—å—à–µ –±—É–¥–µ—Ç.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
amd9800
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–∞–±–æ—Ç–∞ —Å –ñ–ö–ò –Ω–∞ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ HD44780 –∏ –µ–≥–æ –∞–Ω–∞–ª–æ–≥–∞—Ö
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∞–≤–≥ 07, 2015 10:38:30
–ö–∞—Ä–º–∞: -3
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 13
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –∏—é–Ω 02, 2013 12:23:03–°–æ–æ–±—â–µ–Ω–∏–π: 822
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
Rtmip –ø–∏—Å–∞–ª(–∞):
–Ω–æ –∏ —á–∏—Ç–∞—Ç—å –¥–∏—Å–ø–ª–µ–π? –¢–æ–≥–¥–∞ –∏ –≥–ª—é–∫–æ–≤ –º–µ–Ω—å—à–µ –±—É–¥–µ—Ç.
–ü–æ—Ç–æ–º—É —á—Ç–æ —á–µ—Ä–µ–∑ —Ä–µ–≥–∏—Å—Ç—Ä—ã 595 –º–æ–≥—É —Ç–æ–ª—å–∫–æ –ø–µ—Ä–µ–¥–∞–≤–∞—Ç—å –∏–Ω—Ñ–æ—Ä–º–∞—Ü–∏—é.
–ò –∫–∞–∫ –∂–µ –º–Ω–µ –≤ –¥–∞–Ω–Ω–æ–º —Å–ª—É—á–∞–µ —á–∏—Ç–∞—Ç—å –¥–∏—Å–ø–ª–µ–π —É–º–∞ –Ω–µ –ø—Ä–∏–ª–æ–∂—É.
–ù–æ —è –≥–æ—Ç–æ–≤ –æ–±—Å—É–¥–∏—Ç—å –ª—é–±—ã–µ –∏–∑–º–µ–Ω–µ–Ω–∏—è - –ø—Ä–µ–¥–ª–∞–≥–∞–π—Ç–µ...
–ü–æ—Å–ª–µ–¥–Ω–∏–π —Ä–∞–∑ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞–ª–æ—Å—å amd9800 –ü—Ç –∞–≤–≥ 07, 2015 10:43:23, –≤—Å–µ–≥–æ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞–ª–æ—Å—å 2 —Ä–∞–∑(–∞).
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
Gudd-Head
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–∞–±–æ—Ç–∞ —Å –ñ–ö–ò –Ω–∞ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ HD44780 –∏ –µ–≥–æ –∞–Ω–∞–ª–æ–≥–∞—Ö
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∞–≤–≥ 07, 2015 10:41:55
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 67
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1060
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç —Å–µ–Ω 18, 2008 12:27:21–°–æ–æ–±—â–µ–Ω–∏–π: 19733–û—Ç–∫—É–¥–∞: –°—Ç–æ–ª–∏—Ü–∞ –ú–∏—Ä–∞ –°–∞–Ω–∫—Ç-–ü–µ—Ç–µ—Ä–±—É—Ä–≥
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 1
amd9800 –ø–∏—Å–∞–ª(–∞):
–ò –∫–∞–∫ –∂–µ –º–Ω–µ –≤ –¥–∞–Ω–Ω–æ–º —Å–ª—É—á–∞–µ —á–∏—Ç–∞—Ç—å –¥–∏—Å–ø–ª–µ–π
–ó–∞—á–µ–º –≤–∞–º –µ–≥–æ —á–∏—Ç–∞—Ç—å?
–ò–∑–º–µ—Ä–∏—Ç—å –Ω–Ω–Ω–∞–¥–∞?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
amd9800
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–∞–±–æ—Ç–∞ —Å –ñ–ö–ò –Ω–∞ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ HD44780 –∏ –µ–≥–æ –∞–Ω–∞–ª–æ–≥–∞—Ö
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∞–≤–≥ 07, 2015 10:44:46
–ö–∞—Ä–º–∞: -3
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 13
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –∏—é–Ω 02, 2013 12:23:03–°–æ–æ–±—â–µ–Ω–∏–π: 822
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ö–∞–∫ –∑–∞—á–µ–º? –í–æ—Ç –≤—ã—à–µ –∫–æ–ª–µ–≥–∞ –ø—Ä–µ–¥–ª–æ–∂–∏–ª
Rtmip –ø–∏—Å–∞–ª(–∞):
–ü–æ –ø–æ–≤–æ–¥—É –±–∏–±–ª–∏–æ—Ç–µ–∫–∏ LCD, –ø–æ—á–µ–º—É –Ω–µ —Ö–æ—Ç–∏—Ç–µ —Å–¥–µ–ª–∞—Ç—å "—É–Ω–∏–≤–µ—Ä—Å–∞–ª—å–Ω–æ", —Ç.–µ. –Ω–µ —Ç–æ–ª—å–∫–æ –ø–∏—Å–∞—Ç—å –≤ –¥–∏—Å–ø–ª–µ–π, –Ω–æ –∏ —á–∏—Ç–∞—Ç—å –¥–∏—Å–ø–ª–µ–π?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Gudd-Head
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–∞–±–æ—Ç–∞ —Å –ñ–ö–ò –Ω–∞ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ HD44780 –∏ –µ–≥–æ –∞–Ω–∞–ª–æ–≥–∞—Ö
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∞–≤–≥ 07, 2015 10:49:43
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 67
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1060
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç —Å–µ–Ω 18, 2008 12:27:21–°–æ–æ–±—â–µ–Ω–∏–π: 19733–û—Ç–∫—É–¥–∞: –°—Ç–æ–ª–∏—Ü–∞ –ú–∏—Ä–∞ –°–∞–Ω–∫—Ç-–ü–µ—Ç–µ—Ä–±—É—Ä–≥
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 1
–ï—Å–ª–∏ –≤—Å–µ —Ç–∞–π–º–∏–Ω–≥–∏ –≤—ã–¥–µ—Ä–∂–∞—Ç—å, —Ç–æ –∏ —á–∏—Ç–∞—Ç—å –Ω–∏—á–µ–≥–æ –Ω–µ –Ω–∞–¥–æ...
–ò–∑–º–µ—Ä–∏—Ç—å –Ω–Ω–Ω–∞–¥–∞?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
WiseLord
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–∞–±–æ—Ç–∞ —Å –ñ–ö–ò –Ω–∞ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ HD44780 –∏ –µ–≥–æ –∞–Ω–∞–ª–æ–≥–∞—Ö
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∞–≤–≥ 07, 2015 12:44:25
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 86
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1035
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –∞–ø—Ä 11, 2013 11:19:59–°–æ–æ–±—â–µ–Ω–∏–π: 4884–û—Ç–∫—É–¥–∞: –ú–∏–Ω—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–¢–∞–∫–æ–≤—ã–º —Ö–∏—Ç—Ä—ã–º –∞–ª–≥–æ—Ä–∏—Ç–º–æ–º –º–æ–∂–µ—Ç –±—ã—Ç—å, –Ω–∞–ø—Ä–∏–º–µ—Ä, –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏–µ –±—É—Ñ–µ—Ä–∞. –ù–∞–ø—Ä–∏–º–µ—Ä, –¥–ª—è –¥–∏—Å–ø–ª–µ—è 2x16 –∑–∞–≤–æ–¥–∏–º –º–∞—Å—Å–∏–≤ buf[2][16]. –ê –ø–æ—Ç–æ–º –∫–æ–¥ –≤—Ä–æ–¥–µ —ç—Ç–æ–≥–æ:
–ö–æ–¥:
void any_timer_interrupt() {
–ò —ç—Ç–æ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–µ –≤—ã–∑—ã–≤–∞—Ç—å –ø–æ —Ç–∞–π–º–µ—Ä—É, –Ω–∞–ø—Ä–∏–º–µ—Ä, –æ–¥–∏–Ω —Ä–∞–∑ –≤ 100–º–∫—Å. –≠—Ç–æ–≥–æ –≤—Ä–µ–º–µ–Ω–∏ –≤–ø–æ–ª–Ω–µ –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ –¥–ª—è –æ—Ç—Ä–∞–±–æ—Ç–∫–∏ –¥–∏—Å–ø–ª–µ—è. –í–µ—Å—å —ç–∫—Ä–∞–Ω –±—É–¥–µ—Ç –æ–±–Ω–æ–≤–ª—è—Ç—å—Å—è –∑–∞ 34 –∫–æ–º–∞–Ω–¥ (32 –¥–∞–Ω–Ω—ã—Ö + 2 —Å–º–µ–Ω—ã —Å—Ç—Ä–æ–∫–∏), —Ç–æ –µ—Å—Ç—å, —á–∞—Å—Ç–æ—Ç–∞ –æ–±–Ω–æ–≤–ª–µ–Ω–∏—è –∫–∞—Ä—Ç–∏–Ω–∫–∏ –ø—Ä–∏ –ø–µ—Ä–∏–æ–¥–µ 100–º–∫—Å –±—É–¥–µ—Ç –æ–∫–æ–ª–æ 300–ì—Ü.
–í –æ—Å–Ω–æ–≤–Ω–æ–º –∫–æ–¥–µ –ª—é–±–∞—è —Ñ—É–Ω–∫—Ü–∏—è –≤—ã–≤–æ–¥–∞ –Ω–∞ —ç–∫—Ä–∞–Ω —Å–≤–µ–¥—ë—Ç—Å—è –≤—Å–µ–≥–æ –ª–∏—à—å –∫ –∑–∞–ø–∏—Å–∏ –¥–∞–Ω–Ω—ã—Ö –≤ –Ω—É–∂–Ω—ã–µ —è—á–µ–π–∫–∏ –±—É—Ñ–µ—Ä–∞ buf, –ø—Ä–∏ —ç—Ç–æ–º –Ω–∏–∫–∞–∫–∏—Ö –∑–∞–¥–µ—Ä–∂–µ–∫ –Ω–µ –Ω—É–∂–Ω–æ –≤–æ–æ–±—â–µ - –æ –≤—ã–≤–æ–¥–µ –∏–∑–º–µ–Ω–∏–≤—à–µ–≥–æ—Å—è –±—É—Ñ–µ—Ä–∞ –Ω–∞ —ç–∫—Ä–∞–Ω –ø–æ–∑–∞–±–æ—Ç–∏—Ç—Å—è –¥–∞–Ω–Ω–æ–µ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–µ.
–ï—Å—Ç–µ—Å—Ç–≤–µ–Ω–Ω–æ, –∏–Ω–∏—Ü–∏–∞–ª–∏–∑–∏—Ä–æ–≤–∞—Ç—å –¥–∏—Å–ø–ª–µ–π –Ω—É–∂–Ω–æ –∫–∞–∫ –æ–±—ã—á–Ω–æ, –∏ —Ç–æ–ª—å–∫–æ –ø–æ—Å–ª–µ –∏–Ω–∏—Ü–∏–∞–ª–∏–∑–∞—Ü–∏–∏ –∑–∞–ø—É—Å–∫–∞—Ç—å —ç—Ç–æ—Ç —Ç–∞–π–º–µ—Ä.
–ü–æ—Å–ª–µ–¥–Ω–∏–π —Ä–∞–∑ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞–ª–æ—Å—å WiseLord –ü—Ç –∞–≤–≥ 07, 2015 13:15:42, –≤—Å–µ–≥–æ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞–ª–æ—Å—å 1 —Ä–∞–∑.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Alexeyslav
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–∞–±–æ—Ç–∞ —Å –ñ–ö–ò –Ω–∞ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ HD44780 –∏ –µ–≥–æ –∞–Ω–∞–ª–æ–≥–∞—Ö
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∞–≤–≥ 07, 2015 12:54:59
–ö–∞—Ä–º–∞: 28
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 568
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –º–∞–π 05, 2011 21:26:34–°–æ–æ–±—â–µ–Ω–∏–π: 4550–û—Ç–∫—É–¥–∞: –£–∫—Ä–∞–∏–Ω–∞, –°–ª–∞–≤—É—Ç–∏—á
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ù–∞ –∑–∞–¥–µ—Ä–∂–∫–∞—Ö —Ç–∞–∫–æ–µ –Ω–µ –≤–∑–ª–µ—Ç–∏—Ç... –Ω–∞ –æ–¥–∏–Ω —Å–∏–º–≤–æ–ª –º–∏–Ω–∏–º—É–º –ø–æ 16–º–∫—Å... –¥–∞ –Ω–µ —É—Å–ø–µ–µ—Ç –ø—Ä–æ—Å—Ç–æ –æ—Ç—Ä–∞–±–æ—Ç–∞—Ç—å –¥–æ —Å–ª–µ–¥—É—é—â–µ–≥–æ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
WiseLord
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–∞–±–æ—Ç–∞ —Å –ñ–ö–ò –Ω–∞ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ HD44780 –∏ –µ–≥–æ –∞–Ω–∞–ª–æ–≥–∞—Ö
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∞–≤–≥ 07, 2015 13:13:07
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 86
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1035
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –∞–ø—Ä 11, 2013 11:19:59–°–æ–æ–±—â–µ–Ω–∏–π: 4884–û—Ç–∫—É–¥–∞: –ú–∏–Ω—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–í–æ—Ç –∏–º–µ–Ω–Ω–æ —á—Ç–æ –≤–∑–ª–µ—Ç–∏—Ç, –∏ –Ω–∏–∫–∞–∫–∏—Ö –∑–∞–¥–µ—Ä–∂–µ–∫ –Ω–µ –ø–æ–Ω–∞–¥–æ–±–∏—Ç—Å—è –≤–æ–æ–±—â–µ. –ö–æ–º–∞–Ω–¥—ã (–¥–∞–Ω–Ω—ã–µ) –≤ –¥–∏—Å–ø–ª–µ–π –∑–∞ —Å—á—ë—Ç —Ç–∞–π–º–µ—Ä–∞ –±—É–¥—É—Ç –ø–æ—Å—ã–ª–∞—Ç—å—Å—è –Ω–µ —á–∞—â–µ 50–º–∫—Å (–ª–∏–±–æ –∫–∞–∫ –Ω–∞—Å—Ç—Ä–æ–∏—à—å —Ç–∞–π–º–µ—Ä - –µ—Å–ª–∏ –¥–∏—Å–ø–ª–µ–π –ø–æ–∑–≤–æ–ª—è–µ—Ç, –º–æ–∂–Ω–æ –∏ —á–∞—â–µ).
–í–ª–æ–∂–µ–Ω–∏—è:
ks0066buf.7z [14.06 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 160
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
amd9800
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–∞–±–æ—Ç–∞ —Å –ñ–ö–ò –Ω–∞ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ HD44780 –∏ –µ–≥–æ –∞–Ω–∞–ª–æ–≥–∞—Ö
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∞–≤–≥ 07, 2015 15:21:01
–ö–∞—Ä–º–∞: -3
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 13
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –∏—é–Ω 02, 2013 12:23:03–°–æ–æ–±—â–µ–Ω–∏–π: 822
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
WiseLord –ø–∏—Å–∞–ª(–∞):
–¢–∞–∫–æ–≤—ã–º —Ö–∏—Ç—Ä—ã–º –∞–ª–≥–æ—Ä–∏—Ç–º–æ–º –º–æ–∂–µ—Ç –±—ã—Ç—å, –Ω–∞–ø—Ä–∏–º–µ—Ä, –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏–µ –±—É—Ñ–µ—Ä–∞. –ù–∞–ø—Ä–∏–º–µ—Ä, –¥–ª—è –¥–∏—Å–ø–ª–µ—è 2x16 –∑–∞–≤–æ–¥–∏–º –º–∞—Å—Å–∏–≤ buf[2][16].
–ü—Ä–∞–≤–∏–ª—å–Ω–æ –≥–æ–≤–æ—Ä–∏—Ç–µ
–Ø –∫–∞–∫ —Ä–∞–∑ —Ç–æ–∂–µ –æ–± —ç—Ç–æ–º –¥—É–º–∞–ª. –ù–æ –≤–æ—Ç –ø–æ—Å–ª–µ —ç—Ç–æ–≥–æ —É –º–µ–Ω—è –ø–æ—è–≤–∏–ª–æ—Å—å –∫—É—á–∞ –≤–æ–ø—Ä–æ—Å–æ–≤ –∫–∞–∫ —Å–¥–µ–ª–∞—Ç—å –±–∏–±–ª–∏–æ—Ç–µ–∫—É –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ —É–Ω–∏–≤–µ—Ä—Å–∞–ª—å–Ω–æ–π. –í–µ–¥—å –µ—Å—Ç—å –∫—É—á–∞ –Ω—é–∞–Ω—Å–æ–≤.
–î–∏—Å–ø–ª–µ–∏ –º–æ–≥—É—Ç –±—ã—Ç—å 1, 2 –∏ 4—Ö —Å—Ç—Ä–æ—á–Ω—ã–µ.
–¢–∞–∫–∂–µ —Å—Ç—Ä–æ–∫–∞ –º–æ–∂–µ—Ç –∏–º–µ—Ç—å 16 –∏ 20 —Å–∏–º–≤–æ–ª–æ–≤ –¥–ª–∏–Ω—ã.
–ê —Ç–∞–∫–∂–µ –º–∏–Ω—É—Å —ç—Ç–æ–≥–æ –º–µ—Ç–æ–¥–∞ —Ç–æ —á—Ç–æ –±—É—Ñ–µ—Ä—ã –≤—Å–µ—Ö –¥–∏—Å–ø–ª–µ–µ–≤ –±—É–¥—É—Ç —Å–∏–ª—å–Ω–æ –∑–∞–±–∏–≤–∞—Ç—å RAM, –∞ –µ–µ –æ—á–µ–Ω—å –º–∞–ª–æ –Ω–∞ –ú–ö.
–î–∞–≤–∞–π—Ç–µ —Ç–æ–≥–¥–∞ –æ–±—Å—É–∂–¥–∞—Ç—å –∞–ª–≥–æ—Ä–∏—Ç–º —Ä–∞–±–æ—Ç—ã –±–∏–±–ª–∏–æ—Ç–µ–∫–∏ —Å –±—É—Ñ–µ—Ä–æ–º.
–¢–∞–∫–∂–µ —É –º–µ–Ω—è –±—ã–ª –≤–∞—Ä–∏–∞–Ω—Ç —Å–æ–∑–¥–∞–Ω–∏—è –∫–æ–ª—å—Ü–µ–≤–æ–≥–æ –±—É—Ñ–µ—Ä–∞ –≤ –∫–æ—Ç–æ—Ä–æ–º –±—É–¥—É—Ç –ø–æ–º–µ—â–∞—Ç—å—Å—è –∫–æ–º–∞–Ω–¥—ã.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
WiseLord
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–∞–±–æ—Ç–∞ —Å –ñ–ö–ò –Ω–∞ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ HD44780 –∏ –µ–≥–æ –∞–Ω–∞–ª–æ–≥–∞—Ö
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∞–≤–≥ 07, 2015 16:11:18
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 86
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1035
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –∞–ø—Ä 11, 2013 11:19:59–°–æ–æ–±—â–µ–Ω–∏–π: 4884–û—Ç–∫—É–¥–∞: –ú–∏–Ω—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–°–æ–≤–µ—Ä—à–µ–Ω–Ω–æ –Ω–µ –ø—Ä–æ–±–ª–µ–º–∞.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
amd9800
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–∞–±–æ—Ç–∞ —Å –ñ–ö–ò –Ω–∞ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ HD44780 –∏ –µ–≥–æ –∞–Ω–∞–ª–æ–≥–∞—Ö
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∞–≤–≥ 07, 2015 19:18:08
–ö–∞—Ä–º–∞: -3
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 13
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –∏—é–Ω 02, 2013 12:23:03–°–æ–æ–±—â–µ–Ω–∏–π: 822
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ü–æ –∫–∞–∫–æ–º—É –º–µ—Ç–æ–¥—É –ª—É—á—à–µ —Å–∏–Ω—Ö—Ä–æ–Ω–∏–∑–∏—Ä–æ–≤–∞—Ç—å –±—É—Ñ–µ—Ä —Å –¥–∏—Å–ø–ª–µ–µ–º?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
WiseLord
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–∞–±–æ—Ç–∞ —Å –ñ–ö–ò –Ω–∞ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ HD44780 –∏ –µ–≥–æ –∞–Ω–∞–ª–æ–≥–∞—Ö
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∞–≤–≥ 07, 2015 19:39:27
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 86
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1035
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –∞–ø—Ä 11, 2013 11:19:59–°–æ–æ–±—â–µ–Ω–∏–π: 4884–û—Ç–∫—É–¥–∞: –ú–∏–Ω—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ï—Å–ª–∏ –±–∞ –í—ã –≥–ª—è–Ω—É–ª–∏ –∫–æ–¥, —Ç–æ —Ç–∞–∫–∏—Ö –≤–æ–ø—Ä–æ—Å–æ–≤ –±—ã –Ω–µ –∑–∞–¥–∞–≤–∞–ª–∏. –¢–∞–º –≤—Å—ë –ø–æ–Ω—è—Ç–Ω–æ.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Alexeyslav
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–∞–±–æ—Ç–∞ —Å –ñ–ö–ò –Ω–∞ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ HD44780 –∏ –µ–≥–æ –∞–Ω–∞–ª–æ–≥–∞—Ö
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∞–≤–≥ 07, 2015 21:27:05
–ö–∞—Ä–º–∞: 28
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 568
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –º–∞–π 05, 2011 21:26:34–°–æ–æ–±—â–µ–Ω–∏–π: 4550–û—Ç–∫—É–¥–∞: –£–∫—Ä–∞–∏–Ω–∞, –°–ª–∞–≤—É—Ç–∏—á
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–î–æ–±–∞–≤–∏—Ç—å –µ—â–µ –æ–¥–Ω—É –æ—á–µ—Ä–µ–¥—å –∫–æ–º–∞–Ω–¥, –ø—Ä–∏–æ—Ä–∏—Ç–µ—Ç–Ω—É—é. –∏–ª–∏ —è—á–µ–π–∫—É, –≤ –∫–æ—Ç–æ—Ä—É—é –ø–æ–º–µ—â–∞–µ—Ç–µ –∫–æ–º–∞–Ω–¥—É –∏ —Å—Ç–∞–≤–∏—Ç–µ —Ñ–ª–∞–∂–æ–∫ –∏—Å–ø–æ–ª–Ω–µ–Ω–∏—è - –∫–∞–∫ —Ç–æ–ª—å–∫–æ –æ–Ω–∞ –∏—Å–ø–æ–ª–Ω–∏—Ç—Å—è, –≤ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–∏ —Ñ–ª–∞–∂–æ–∫ –¥–æ–ª–∂–µ–Ω –±—É–¥–µ—Ç —Å–Ω—è—Ç –∏ –º–æ–∂–Ω–æ —Å–ª–∞—Ç—å —Å–ª–µ–¥—É—é—â—É—é. –ê –≤ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–∏ –¥–µ–ª–∞—Ç—å –ø—Ä–æ–≤–µ—Ä–∫—É –Ω–∞ —ç—Ç–æ—Ç —Ñ–ª–∞–∂–æ–∫ - –µ—Å–ª–∏ –æ–Ω –ø–æ–¥–Ω—è—Ç, –∏—Å–ø–æ–ª–Ω–∏—Ç—å –∫–æ–º–∞–Ω–¥—É –∑–∞–Ω–µ—Å—ë–Ω–Ω—É—é –≤ —è—á–µ–π–∫—É –∏ —Å–Ω—è—Ç—å —Ñ–ª–∞–∂–æ–∫.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
WiseLord
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–∞–±–æ—Ç–∞ —Å –ñ–ö–ò –Ω–∞ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ HD44780 –∏ –µ–≥–æ –∞–Ω–∞–ª–æ–≥–∞—Ö
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∞–≤–≥ 07, 2015 21:38:31
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 86
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1035
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –∞–ø—Ä 11, 2013 11:19:59–°–æ–æ–±—â–µ–Ω–∏–π: 4884–û—Ç–∫—É–¥–∞: –ú–∏–Ω—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ù–µ –ø–æ–Ω–∏–º–∞—é, –∑–∞—á–µ–º —Ç–∞–∫–∏–µ —Å–ª–æ–∂–Ω–æ—Å—Ç–∏. –ù–µ—Ç –Ω–∏–∫–∞–∫–æ–π –ø—Ä–∏—á–∏–Ω—ã –ø–æ—Å—ã–ª–∞—Ç—å –≤ –¥–∏—Å–ø–ª–µ–π –∫–∞–∫–∏–µ-–ª–∏–±–æ –∫–æ–º–∞–Ω–¥—ã. –ü—Ä–æ—Å—Ç–æ –ø–∏—à–µ–º –≤ –±—É—Ñ–µ—Ä –¥–∞–Ω—ã–µ - —ç—Ç–æ –ø–æ–∫—Ä—ã–≤–∞–µ—Ç –≤—Å–µ –Ω–µ–æ–±—Ö–æ–¥–∏–º—ã–µ –Ω—É–∂–¥—ã.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Alexeyslav
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–∞–±–æ—Ç–∞ —Å –ñ–ö–ò –Ω–∞ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ HD44780 –∏ –µ–≥–æ –∞–Ω–∞–ª–æ–≥–∞—Ö
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∞–≤–≥ 07, 2015 21:58:50
–ö–∞—Ä–º–∞: 28
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 568
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –º–∞–π 05, 2011 21:26:34–°–æ–æ–±—â–µ–Ω–∏–π: 4550–û—Ç–∫—É–¥–∞: –£–∫—Ä–∞–∏–Ω–∞, –°–ª–∞–≤—É—Ç–∏—á
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ï—Å—Ç—å –æ—á–µ–Ω—å —á–∞—Å—Ç–æ –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ—Å—Ç—å –Ω–∞–ø—Ä–∏–º–µ—Ä –≤–∫–ª—é—á–∏—Ç—å –∫—É—Ä—Å–æ—Ä. –∞–ø–ø–∞—Ä–∞—Ç–Ω–æ. –ò–ª–∏ –µ–≥–æ —Ç–æ–∂–µ —ç–º—É–ª–∏—Ä–æ–≤–∞—Ç—å —á–µ—Ä–µ–∑ –±—É—Ñ—Ñ–µ—Ä?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Rtmip
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–∞–±–æ—Ç–∞ —Å –ñ–ö–ò –Ω–∞ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ HD44780 –∏ –µ–≥–æ –∞–Ω–∞–ª–æ–≥–∞—Ö
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –∞–≤–≥ 08, 2015 01:15:48
–î–µ—Ä–∂–∏—Ç –ø–∞—è–ª—å–Ω–∏–∫ —Ö–≤–æ—Å—Ç–æ–º
–ö–∞—Ä–º–∞: 10
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 161
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –∞–ø—Ä 03, 2014 23:16:55–°–æ–æ–±—â–µ–Ω–∏–π: 963–û—Ç–∫—É–¥–∞: –Ý–æ—Å—Å–∏—è
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
amd9800 –ø–∏—Å–∞–ª(–∞):
–ü–æ—Ç–æ–º—É —á—Ç–æ —á–µ—Ä–µ–∑ —Ä–µ–≥–∏—Å—Ç—Ä—ã 595 –º–æ–≥—É —Ç–æ–ª—å–∫–æ –ø–µ—Ä–µ–¥–∞–≤–∞—Ç—å –∏–Ω—Ñ–æ—Ä–º–∞—Ü–∏—é.
–≠—Ç–æ –ø–æ–Ω—è—Ç–Ω–æ
–ù–æ –µ—Å–ª–∏ –≤—ã –ø—Ä–∏—Å–ª—É—à–∞–µ—Ç–µ—Å—å –∫
Albert_V –∏ –Ω–µ –±—É–¥–µ—Ç–µ —Ç–∞–∫ —É–∂ —Å–∏–ª—å–Ω–æ —ç–∫–æ–Ω–æ–º–∏—Ç—å –Ω–∞ –≤—ã–≤–æ–¥–∞—Ö –ú–ö, —Ç–æ –º–æ–≥—É –ø—Ä–µ–¥–ª–æ–∂–∏—Ç—å
—Ç–∞–∫–∏–µ –≤–∞—Ä–∏–∞–Ω—Ç—ã:
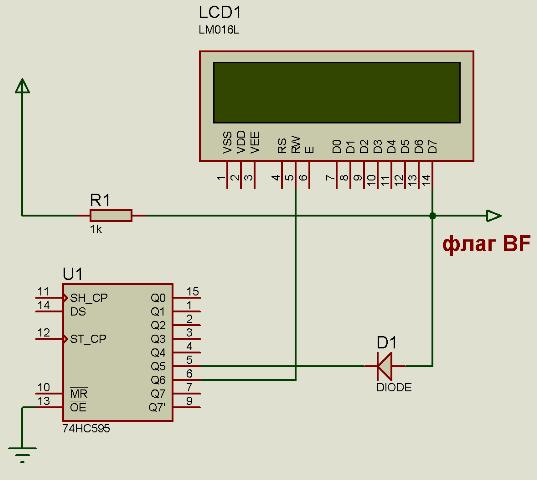
–°–ø–æ–π–ª–µ—Ä 1 - —Ç—É—Ç –Ω–∞–¥–æ –ø–æ–∑–∞–±–æ—Ç–∏—Ç—å—Å—è –æ —Ç–æ–º, —á—Ç–æ–±—ã –ø—Ä–∏ —á—Ç–µ–Ω–∏–∏ —Ñ–ª–∞–≥–∞ –∑–∞–Ω—è—Ç–æ—Å—Ç–∏ –Ω–∞ –≤—ã—Ö–æ–¥–µ 595-–≥–æ –±—ã–ª–∏ –µ–¥–∏–Ω–∏—Ü—ã.–î–∞–ª–µ–µ —Å–æ–∑–¥–∞–µ—Ç–µ –µ—â–µ –æ–¥–Ω—É —Ñ—É–Ω–∫—Ü–∏—é, –Ω–∞–ø—Ä–∏–º–µ—Ä:
–ö–æ–¥:
SPI_READ_DATA(data, lcd_nr)
–≤ –∫–æ—Ç–æ—Ä–æ–π –Ω–∞–¥–æ –±—É–¥–µ—Ç —É–ø—Ä–∞–≤–ª—è—Ç—å —Ä–µ–≥–∏—Å—Ç—Ä–æ–º 74–ù–°595 –∏ –¥–∞–≤–∞—Ç—å –∫–æ–º–∞–Ω–¥—É —á—Ç–µ–Ω–∏—è.
–ü—Ä–∏ —ç—Ç–æ–º –ø—Ä–æ–≤–µ—Ä—è–µ—Ç–µ –≤—ã–±—Ä–∞–Ω–Ω—ã–π –ø–∏–Ω –ú–ö –Ω–∞ 0 –∏–ª–∏ 1, —ç—Ç–æ –∏ –±—É–¥–µ—Ç —Ñ–ª–∞–≥ BF.
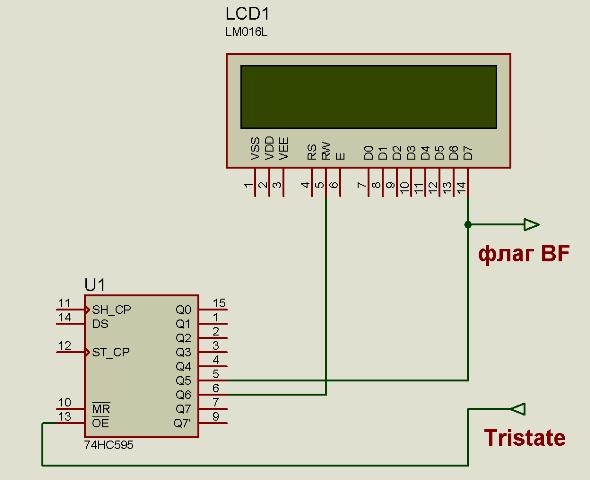
–ú–æ–∂–µ—Ç –±—ã—Ç—å –º–æ–∂–Ω–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å —Ç–æ—Ç –ø–∏–Ω –ú–ö, —á—Ç–æ —É–ø—Ä–∞–≤–ª—è–µ—Ç ST_CP?
–≠—Ç–æ –ø—Ä–æ—Å—Ç–æ –∏–¥–µ—è, –∏–Ω—Ç–µ—Ä–µ—Å–Ω–æ, —á—Ç–æ —Å–∫–∞–∂—É—Ç –ø—Ä–æ—Ñ–∏?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 97 –∏–∑ 122
[ –°–æ–æ–±—â–µ–Ω–∏–π: 2431 ]
... , , , , , , ...
–ö—Ç–æ —Å–µ–π—á–∞—Å –Ω–∞ —Ñ–æ—Ä—É–º–µ
–°–µ–π—á–∞—Å —ç—Ç–æ—Ç —Ñ–æ—Ä—É–º –ø—Ä–æ—Å–º–∞—Ç—Ä–∏–≤–∞—é—Ç: –Ω–µ—Ç –∑–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω–Ω—ã—Ö –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª–µ–π –∏ –≥–æ—Å—Ç–∏: 2
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –Ω–∞—á–∏–Ω–∞—Ç—å —Ç–µ–º—ã–Ω–µ –º–æ–∂–µ—Ç–µ –æ—Ç–≤–µ—á–∞—Ç—å –Ω–∞ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ —É–¥–∞–ª—è—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ –¥–æ–±–∞–≤–ª—è—Ç—å –≤–ª–æ–∂–µ–Ω–∏—è