


| –§–æ—Ä—É–º –Ý–∞–¥–∏–æ–ö–æ—Ç https://radiokot.ru/forum/ |
|
| –Ω—É–∂–Ω–∞ –ø–æ–º–æ—â—å –≤ –∫–æ–º–ø–∏–ª—è—Ü–∏–∏ https://radiokot.ru/forum/viewtopic.php?f=66&t=197945 |
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 1 –∏–∑ 1 |
| –ê–≤—Ç–æ—Ä: | mitre [ –ü–Ω –º–∞–π 12, 2025 22:41:51 ] | ||
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | –Ω—É–∂–Ω–∞ –ø–æ–º–æ—â—å –≤ –∫–æ–º–ø–∏–ª—è—Ü–∏–∏ | ||
–ü—Ä–∏–≤–µ—Ç –∏–∑ –ë–æ–ª–≥–∞—Ä–∏–∏. –Ø –Ω–µ –º–æ–≥—É —Å–∫–æ–º–ø–∏–ª–∏—Ä–æ–≤–∞—Ç—å —ç—Ç–æ—Ç —Ñ–∞–π–ª. –ú–æ–∂–µ—Ç–µ –ª–∏ –≤—ã –∏—Å–ø—Ä–∞–≤–∏—Ç—å –æ—à–∏–±–∫–∏? –∏–ª–∏ –¥–µ–ª–∞—Ç—å Binary file (.bin) —Ñ–∞–π–ª –Ø —Ö–æ—á—É Binary file (.bin) —Ñ–∞–π–ª
|
|||
| –ê–≤—Ç–æ—Ä: | smacorp [ –ü–Ω –º–∞–π 12, 2025 23:54:04 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –Ω—É–∂–Ω–∞ –ø–æ–º–æ—â—å –≤ –∫–æ–º–ø–∏–ª—è—Ü–∏–∏ |
mitre, –≤ –ë–æ–ª–≥–∞—Ä–∏–∏ –∑–Ω–∞—é—Ç —Å–ª–æ–≤–æ "—Ö–µ—Ä–Ω—è"? –¢–∞–∫ –≤–æ—Ç, –í—ã –ø—Ä–∏—Å–ª–∞–ª–∏ —Ö–µ—Ä–Ω—é, –∞ –Ω–µ —Å–∫–µ—Ç—á - —ç—Ç–æ –Ω–µ –∏—Å—Ö–æ–¥–Ω—ã–π –∫–æ–¥, –º–æ–≥—É—â–∏–π –±—ã—Ç—å —Å–∫–æ–º–ø–∏–ª–∏—Ä–æ–≤–∞–Ω–Ω—ã–º, –∏ –∏—Å–ø—Ä–∞–≤–ª—è—Ç—å —Ç–∞–º –ø—Ä–æ—Å—Ç–æ –Ω–µ—á–µ–≥–æ. |
|
| –ê–≤—Ç–æ—Ä: | –£–æ—à [ –ü–Ω –º–∞–π 12, 2025 23:57:49 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –Ω—É–∂–Ω–∞ –ø–æ–º–æ—â—å –≤ –∫–æ–º–ø–∏–ª—è—Ü–∏–∏ |
–∏–Ω—Ç–µ—Ä–µ—Å–Ω–æ, –≤ –∫–æ–º–ø–∏–ª—è—Ç–æ—Ä–µ –µ—Å—Ç—å —Å–æ–æ–±—â–µ–Ω–∏–µ –æ–± –æ—à–∏–±–∫–µ "—Ö–µ—Ä–Ω—è" ? –î–æ–±–∞–≤–ª–µ–Ω–æ after 33 seconds: –ù–µ –ò–ò –ª–∏ –≥–µ–Ω–µ—Ä–∏—Ä–æ–≤–∞–ª —ç—Ç–æ—Ç –∫–æ–¥... |
|
| –ê–≤—Ç–æ—Ä: | roman.com [ –í—Ç –º–∞–π 13, 2025 09:25:53 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –Ω—É–∂–Ω–∞ –ø–æ–º–æ—â—å –≤ –∫–æ–º–ø–∏–ª—è—Ü–∏–∏ |
–≤—Å—ë —á—Ç–æ —è –ø–æ–Ω—è–ª... esp8266... nodemcuv2... Home Assistant... –ö–∞–∂–µ—Ç—Å—è, –≥–¥–µ-—Ç–æ —É–∂–µ –æ–±—Å—É–∂–¥–∞–ª–∏... https://www.radiokot.ru/forum/viewtopic ... &start=160 |
|
| –ê–≤—Ç–æ—Ä: | mitre [ –ü—Ç –∏—é–Ω 20, 2025 21:25:52 ] | ||
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –Ω—É–∂–Ω–∞ –ø–æ–º–æ—â—å –≤ –∫–æ–º–ø–∏–ª—è—Ü–∏–∏ | ||
–ì–¥–µ —è –¥–æ–ø—É—Å—Ç–∏–ª –æ—à–∏–±–∫—É, –∑–∞—Å—Ç–∞–≤–∏–≤ –º–æ—Ç–æ—Ä –≤—Ä–∞—â–∞—Ç—å—Å—è —Ç–æ–ª—å–∫–æ –≤ –æ–¥–Ω–æ–º –Ω–∞–ø—Ä–∞–≤–ª–µ–Ω–∏–∏?
|
|||
| –ê–≤—Ç–æ—Ä: | mitre [ –°–± –∏—é–Ω 21, 2025 08:34:50 ] | ||
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –Ω—É–∂–Ω–∞ –ø–æ–º–æ—â—å –≤ –∫–æ–º–ø–∏–ª—è—Ü–∏–∏ | ||
–í–æ—Ç –∫–∞–∫ –ø–æ–¥–∫–ª—é—á–µ–Ω –¥–≤–∏–≥–∞—Ç–µ–ª—å
|
|||
| –ê–≤—Ç–æ—Ä: | roman.com [ –°–± –∏—é–Ω 21, 2025 10:30:55 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –Ω—É–∂–Ω–∞ –ø–æ–º–æ—â—å –≤ –∫–æ–º–ø–∏–ª—è—Ü–∏–∏ |
–¥–≤–∏–≥–∞—Ç–µ–ª—å –º—ã —Å–µ–π—á–∞—Å –ø–æ–¥–∫–ª—é—á–∞–µ–º –≤ —Å–æ—Å–µ–¥–Ω–µ–π —Ç–µ–º–µ... viewtopic.php?f=28&t=185219&start=220 |
|
| –ê–≤—Ç–æ—Ä: | kvn234 [ –í—Å –∏—é–Ω 22, 2025 11:59:37 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –Ω—É–∂–Ω–∞ –ø–æ–º–æ—â—å –≤ –∫–æ–º–ø–∏–ª—è—Ü–∏–∏ |
–¥–≤–∏–≥–∞—Ç–µ–ª—å –º—ã —Å–µ–π—á–∞—Å –ø–æ–¥–∫–ª—é—á–∞–µ–º –≤ —Å–æ—Å–µ–¥–Ω–µ–π —Ç–µ–º–µ... viewtopic.php?f=28&t=185219&start=220 –¢–æ–≤–∞—Ä–∏—â –ª—é–±–∏—Ç —Å–ª–µ–≥–∫–∞ –ø—Ä–∏–≤—Ä–∞—Ç—å. –î–≤–∏–≥–∞—Ç–µ–ª—å –ø–æ–¥–∫–ª—é—á–∞–ª–∏ –Ω–µ –º—ã, –∞ —è. –ò—Å—Ö–æ–¥–Ω–∏–∫–∏ –º–æ–∂–Ω–æ –ø–æ—Å–º–æ—Ç—Ä–µ—Ç—å –∑–¥–µ—Å—å https://t.me/zu_kvn/1880/2129?single 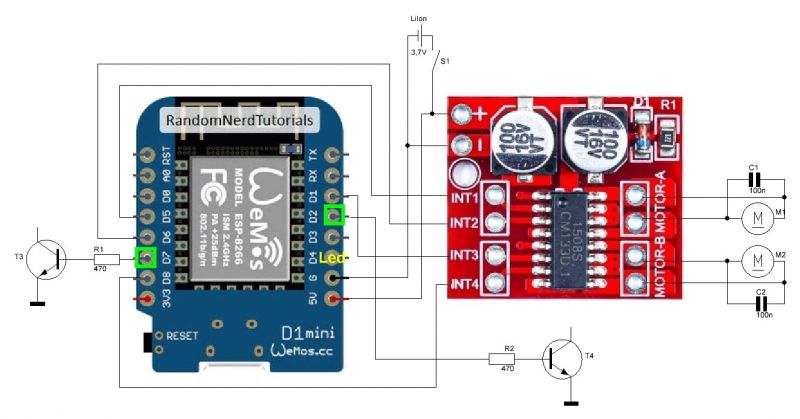
|
|
| –ê–≤—Ç–æ—Ä: | roman.com [ –í—Å –∏—é–Ω 22, 2025 17:00:36 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –Ω—É–∂–Ω–∞ –ø–æ–º–æ—â—å –≤ –∫–æ–º–ø–∏–ª—è—Ü–∏–∏ |
—ç—Ç–∏ –ò—Å—Ö–æ–¥–Ω–∏–∫–∏ –Ω–µ –∫–∞—Ç—è—Ç. —Ç–æ–≤–∞—Ä–∏—â –ø–æ–¥–∫–ª—é—á–∞–µ—Ç —à–∞–≥–æ–≤—ã–π –¥–≤–∏–≥–∞—Ç–µ–ª—å. 
|
|
| –ê–≤—Ç–æ—Ä: | mitre [ –í—Å –∏—é–Ω 29, 2025 12:04:44 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –Ω—É–∂–Ω–∞ –ø–æ–º–æ—â—å –≤ –∫–æ–º–ø–∏–ª—è—Ü–∏–∏ |
–í—Å–µ —Ä–∞–±–æ—Ç–∞–ª–æ, –∫–æ–≥–¥–∞ —è –≤–∫–ª—é—á–µ–Ω–∏ 2 –ø–∏—Ç–∞–Ω–∏—è –æ–¥–∏–Ω 5V –¥–ª—è ESP8266 –∏ –µ—â–µ –æ–¥–∏–Ω 5V –¥–ª—è ULN2003 –ø–∏—Ç–∞–Ω–∏—è. –ü–æ—á–µ–º—É –¥–æ–ª–∂–µ–Ω –¥–≤–∞ –∏—Å—Ç–æ—á–Ω–∏–∫–∞ –ø–∏—Ç–∞–Ω–∏—è –æ—Ç 5V???? |
|
| –ê–≤—Ç–æ—Ä: | roman.com [ –í—Å –∏—é–Ω 29, 2025 14:01:40 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –Ω—É–∂–Ω–∞ –ø–æ–º–æ—â—å –≤ –∫–æ–º–ø–∏–ª—è—Ü–∏–∏ |
–≤–∏–¥–∏–º–æ —Å–∏–ª—å–Ω—ã–µ –ø–æ–º–µ—Ö–∏ –ø–æ –ø–∏—Ç–∞–Ω–∏—é... –∏–ª–∏ —Å–ª–∞–±—ã–π –∏—Å—Ç–æ—á–Ω–∏–∫ –ø–∏—Ç–∞–Ω–∏—è... –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ –ø—Ä–æ–≤–µ–¥–∞–µ—Ç. –≤ –Ω–æ—Ä–º–∞–ª—å–Ω—ã–π —Å—Ö–µ–º–∞—Ö ULN2003 –ø–∏—Ç–∞–µ—Ç—Å—è –Ω–∞–ø—Ä—è–º—É—é –æ—Ç –±–ª–æ–∫–∞ –ø–∏—Ç–∞–Ω–∏—è 5V –∞ ESP8266 –ø–∏—Ç–∞–µ—Ç—Å—è –æ—Ç —Ç–æ–≥–æ –∂–µ –±–ª–æ–∫–∞ –ø–∏—Ç–∞–Ω–∏—è 5V –Ω–æ —á–µ—Ä–µ–∑ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ç–æ—Ä 3,3V. |
|
| –ê–≤—Ç–æ—Ä: | mitre [ –ü—Ç –∞–≤–≥ 08, 2025 17:17:00 ] |
| –ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: | Re: –Ω—É–∂–Ω–∞ –ø–æ–º–æ—â—å –≤ –∫–æ–º–ø–∏–ª—è—Ü–∏–∏ |
Пожалуйста, подскажите, как это сделать. Это код для жалюзи, и он работает как с Sinric, так и с потенциометром, но у меня возникла проблема с синхронизацией потенциометра и Sinric Pro. Итак, когда я поворачиваю потенциометр в положение «открыть жалюзи», они открываются. Однако когда я закрываю их с помощью Sinric, как открыть их с помощью потенциометра, учитывая, что потенциометр находится в положении «открыть жалюзи»? Код: #include <Arduino.h> #include <ESP8266WiFi.h> #include <ESP8266mDNS.h> #include <WiFiUdp.h> #include <ArduinoOTA.h> #include <EEPROM.h> #include <SinricPro.h> #include <SinricProBlinds.h> #include <AccelStepper.h> #include "credentials.h" // WIFI_SSID, WIFI_PASS, APP_KEY, APP_SECRET, BLINDS_ID //#define LEFT_BLIND #ifdef LEFT_BLIND #define IN1 D1 #define IN2 D3 #define IN3 D2 #define IN4 D4 #else #define IN1 D4 #define IN2 D2 #define IN3 D3 #define IN4 D1 #endif #define BUTTON_UP_PIN D5 #define BUTTON_DOWN_PIN D6 #define LED_PIN D7 #define BUILTIN_LED D0 #define POTENTIOMETER A0 #define BAUD_RATE 115200 #define DEBOUNCE_TIME 300 #define EEPROM_SAVE_DELAY 3000 #define MAX_STEPS 500 #define MIN_STEPS 10 #define DEFAULT_STEPS 200 #define POTENTIOMETER_THRESHOLD 3 #define MAX_SPEED 800 #define ACCELERATION 500 #define POSITION_REPORT_INTERVAL 5000 #define POT_TIMEOUT 300000 // 5 минути AccelStepper stepper(AccelStepper::FULL4WIRE, IN1, IN3, IN2, IN4); int blindsPosition = 0; int blindsTarget = 0; bool powerState = true; int stepsPerPercent = DEFAULT_STEPS; unsigned long lastPress = 0; bool stepsChanged = false; unsigned long stepsChangeTime = 0; int lastPotValue = -100; unsigned long lastPositionReport = 0; bool sinricProConnected = false; bool externalControl = false; unsigned long lastExternalControl = 0; const unsigned long EXTERNAL_CONTROL_TIMEOUT = 10000; int virtualPotPosition = 0; unsigned long lastPotMoveTime = 0; void handleButtons(); void handlePotentiometer(); void loadStepsFromEEPROM(); void saveStepsToEEPROM(); void indicateFullRotations(); void handleMovement(); void reportPosition(); void calibrateStepper(); void setupWiFi(); void setupSinricPro(); void updateSinricPosition(); bool onPowerState(const String &deviceId, bool &state) { powerState = state; if (!powerState && stepper.isRunning()) stepper.stop(); return true; } bool onRangeValue(const String &deviceId, int &position) { externalControl = true; lastExternalControl = millis(); blindsTarget = position; if (millis() - lastPotMoveTime > POT_TIMEOUT) { virtualPotPosition = position; lastPotValue = position; } return true; } bool onAdjustRangeValue(const String &deviceId, int &positionDelta) { externalControl = true; lastExternalControl = millis(); blindsTarget += positionDelta; positionDelta = blindsTarget; if (millis() - lastPotMoveTime > POT_TIMEOUT) { virtualPotPosition = blindsTarget; lastPotValue = blindsTarget; } return true; } void setupWiFi() { Serial.begin(BAUD_RATE); WiFi.begin(WIFI_SSID, WIFI_PASS); while (WiFi.status() != WL_CONNECTED) { delay(500); } ArduinoOTA.setHostname("SmartBlinds"); ArduinoOTA.begin(); } void setupSinricPro() { SinricProBlinds &myBlinds = SinricPro[BLINDS_ID]; myBlinds.onPowerState(onPowerState); myBlinds.onRangeValue(onRangeValue); myBlinds.onAdjustRangeValue(onAdjustRangeValue); SinricPro.onConnected([]() { sinricProConnected = true; updateSinricPosition(); }); SinricPro.onDisconnected([]() { sinricProConnected = false; }); SinricPro.begin(APP_KEY, APP_SECRET); } void setupPins() { pinMode(BUTTON_UP_PIN, INPUT_PULLUP); pinMode(BUTTON_DOWN_PIN, INPUT_PULLUP); pinMode(LED_PIN, OUTPUT); pinMode(BUILTIN_LED, OUTPUT); pinMode(POTENTIOMETER, INPUT); } void loadStepsFromEEPROM() { EEPROM.begin(4); EEPROM.get(0, stepsPerPercent); EEPROM.end(); if(stepsPerPercent < MIN_STEPS || stepsPerPercent > MAX_STEPS) stepsPerPercent = DEFAULT_STEPS; } void saveStepsToEEPROM() { EEPROM.begin(4); EEPROM.put(0, stepsPerPercent); EEPROM.commit(); EEPROM.end(); stepsChanged = false; } void indicateFullRotations() { digitalWrite(LED_PIN, HIGH); delay(300); digitalWrite(LED_PIN, LOW); } void handleButtons() { unsigned long currentMillis = millis(); if(currentMillis - lastPress < DEBOUNCE_TIME) return; if(digitalRead(BUTTON_UP_PIN) == LOW) { stepsPerPercent = min(stepsPerPercent + 10, MAX_STEPS); stepsChanged = true; stepsChangeTime = currentMillis; lastPress = currentMillis; indicateFullRotations(); } if(digitalRead(BUTTON_DOWN_PIN) == LOW) { stepsPerPercent = max(stepsPerPercent - 10, MIN_STEPS); stepsChanged = true; stepsChangeTime = currentMillis; lastPress = currentMillis; indicateFullRotations(); } if(stepsChanged && (currentMillis - stepsChangeTime > EEPROM_SAVE_DELAY)) saveStepsToEEPROM(); } // FIXED POTENTIOMETER HANDLING void handlePotentiometer() { static unsigned long lastPotRead = 0; unsigned long currentMillis = millis(); if (currentMillis - lastPotRead < 100) return; lastPotRead = currentMillis; int potValue = analogRead(POTENTIOMETER); int mappedValue = map(potValue, 0, 1023, 0, 100); // Ако разликата е значителна или сме близо до виртуалната позиция if (abs(mappedValue - lastPotValue) > POTENTIOMETER_THRESHOLD) { lastPotMoveTime = currentMillis; blindsTarget = mappedValue; virtualPotPosition = mappedValue; lastPotValue = mappedValue; } } void updateSinricPosition() { if (!sinricProConnected) return; SinricProBlinds &myBlinds = SinricPro[BLINDS_ID]; myBlinds.sendRangeValueEvent(blindsPosition); lastPositionReport = millis(); } void handleMovement() { static long targetSteps = 0; static int lastReportedPosition = -1; if (!powerState) { if (stepper.isRunning()) stepper.stop(); return; } if (blindsTarget != blindsPosition) { targetSteps = (long)blindsTarget * stepsPerPercent; stepper.moveTo(targetSteps); } if (stepper.distanceToGo() != 0) stepper.run(); else if (blindsPosition != blindsTarget) { blindsPosition = blindsTarget; if (blindsPosition != lastReportedPosition) { updateSinricPosition(); lastReportedPosition = blindsPosition; } } } void calibrateStepper() { stepper.setMaxSpeed(MAX_SPEED); stepper.setAcceleration(ACCELERATION); stepper.moveTo(100 * stepsPerPercent); while (stepper.distanceToGo() != 0) { stepper.run(); delay(1); } delay(1000); stepper.moveTo(0); while (stepper.distanceToGo() != 0) { stepper.run(); delay(1); } stepper.setCurrentPosition(0); blindsPosition = 0; blindsTarget = 0; } void setup() { setupPins(); loadStepsFromEEPROM(); stepper.setMaxSpeed(MAX_SPEED); stepper.setAcceleration(ACCELERATION); setupWiFi(); setupSinricPro(); calibrateStepper(); } void loop() { ArduinoOTA.handle(); SinricPro.handle(); handleButtons(); handlePotentiometer(); handleMovement(); if (sinricProConnected && (millis() - lastPositionReport > POSITION_REPORT_INTERVAL)) updateSinricPosition(); } |
|
| –°—Ç—Ä–∞–Ω–∏—Ü–∞ 1 –∏–∑ 1 | –ß–∞—Å–æ–≤–æ–π –ø–æ—è—Å: UTC + 3 —á–∞—Å–∞ |
| Powered by phpBB © 2000, 2002, 2005, 2007 phpBB Group http://www.phpbb.com/ |
|