|
–§–æ—Ä—É–º –Ý–∞–¥–∏–æ–ö–æ—Ç • –ü—Ä–æ—Å–º–æ—Ç—Ä —Ç–µ–º—ã - –õ–∞–∑–µ—Ä–Ω–∞—è —É—Å—Ç–∞–Ω–æ–≤–∫–∞ –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ –æ—Ç AlphaCrow
–°–æ–æ–±—â–µ–Ω–∏—è –±–µ–∑ –æ—Ç–≤–µ—Ç–æ–≤ | –ê–∫—Ç–∏–≤–Ω—ã–µ —Ç–µ–º—ã
 
|
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 97 –∏–∑ 506
|
[ –°–æ–æ–±—â–µ–Ω–∏–π: 10103 ] |
... , , , , , , ... |
| –ê–≤—Ç–æ—Ä |
–°–æ–æ–±—â–µ–Ω–∏–µ |
|
vilkin
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏.  –î–æ–±–∞–≤–ª–µ–Ω–æ: –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –º–∞—Ä 25, 2016 04:37:20 |
|
| –û—Ç–∫—Ä—ã–ª –≥–ª–∞–∑–∞ |
 |
–ö–∞—Ä–º–∞: 6
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 14
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –º–∞–π 23, 2010 11:54:59
–°–æ–æ–±—â–µ–Ω–∏–π: 69
–û—Ç–∫—É–¥–∞: –ú–æ—Å–∫–≤–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
smacorp –ø–∏—Å–∞–ª(–∞): –¥–µ–ª–∞–µ—Ç—Å—è –º–∞—Ç—Ä–∏—Ü–∞ –ø–µ—Ä–µ—Ö–æ–¥–Ω—ã—Ö –º–µ—Ç–∞–ª–ª–∏–∑–∏—Ä–æ–≤–∞–Ω—ã—Ö –æ—Ç–≤–µ—Ä—Å—Ç–∏–π –≠—Ç–æ –±—ã–ª–∞ —à—É—Ç–∫–∞? –°–ø–∞—Å–∏–±–æ –∑–∞ —Å–æ–≤–µ—Ç. –ù–æ —è –≤–æ–∑–¥–µ—Ä–∂—É—Å—å –ø–æ–∫–∞ –æ—Ç –æ—Ç "–º–∞—Ç—Ä–∏—Ü—ã –º–µ—Ç–∞–ª–ª–∏–∑–∏—Ä–æ–≤–∞–Ω–Ω—ã—Ö –æ—Ç–≤–µ—Ä—Å—Ç–∏–π"  –í –¥–æ–º–∞—à–Ω–∏—Ö —É—Å–ª–æ–≤–∏—è—Ö –¥–ª—è –º–µ–Ω—è —ç—Ç–æ –ø–æ–∫–∞ –Ω–µ —Ä–µ–∞–ª–∏–∑—É–µ–º–æ... –£ –Ω–∞—Å –∫–∞–∫ —Ñ–∏–∑–∏—á–µ—Å–∫–æ–µ –ª–∏—Ü–æ –Ω–µ —Å–º–æ–≥ –Ω–∏ –∫–∏—Å–ª–æ—Ç –ø–æ–∫–∞ –∫—É–ø–∏—Ç—å –Ω–∏ –≥–∏–ø–æ—Ñ–æ—Å—Ñ–∏—Ç–∞ –∫–∞–ª—å—Ü–∏—è. –ï—Å—Ç—å —Ç–æ–ª—å–∫–æ –ª–æ–º –∑–æ–ª–æ—Ç–∞ –∏ –Ω–µ–±–æ–ª—å—à–∞—è –∫—É—á–∫–∞ –ø–∞–ª–ª–∞–¥–∏–π—Å–æ–¥–µ—Ä–∂–∞—â–∏—Ö –∫–æ–Ω–¥–µ–Ω—Å–∞—Ç–æ—Ä–æ–≤, –¥–æ –º–µ—Ç–∞–ª–ª–∏–∑–∞—Ü–∏–∏ –¥–∞–ª–µ–∫–æ... –ü—Ä–æ—â–µ —Ç—Ä–∞–Ω–∑–∏—Å—Ç–æ—Ä –≤–∑—è—Ç—å –≤ –∫–æ—Ä–ø—É—Å–µ —Å –±–æ–ª—å—à–µ–π —Ä–∞—Å—Å–µ–∏–≤–∞–µ–º–æ–π –º–æ—â–Ω–æ—Å—Ç—å—é, –Ω—É –∏–ª–∏ –∫ –∫–æ—Ç–æ—Ä–æ–º—É —Ä–∞–¥–∏–∞—Ç–æ—Ä –º–æ–∂–Ω–æ –ø—Ä–∏–∫—Ä—É—Ç–∏—Ç—å.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
 |
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
evsi
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –º–∞—Ä 25, 2016 05:32:58 |
|
| –í—ã–º–æ–≥–∞—Ç–µ–ª—å –ø—Ä–∏–ø–æ—è |
 |
–ö–∞—Ä–º–∞: 7
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: -14
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –∏—é–Ω 06, 2012 10:09:34
–°–æ–æ–±—â–µ–Ω–∏–π: 574
–û—Ç–∫—É–¥–∞: –ö–∏–µ–≤
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: -2
|
AlphaCrow –ø–∏—Å–∞–ª(–∞): –õ—é–±–∏—Ç–µ–ª—è–º –ø—Ä–∏–º–µ–Ω—è—Ç—å "–º—ã—à–∫–∏" –¥–ª—è –∫–æ–Ω—Ç—Ä–æ–ª—è –ø–µ—Ä–µ–º–µ—â–µ–Ω–∏–π. –ú–æ–≥—É –≤–∞—Å —Å—Ä–∞–∑—É –æ–±–ª–æ–º–∞—Ç—å, –¥–ª—è –¥–∞–Ω–Ω–æ–≥–æ –¥–µ–≤–∞–π—Å–∞ –æ–Ω —Ç–æ—á–Ω–æ –ù–ï –ü–û–î–•–û–î–ò–¢. –ù–µ –±—É–¥—É –≥–æ–≤–æ—Ä–∏—Ç—å –¥–∞–∂–µ –æ —Ä–∞–∑—Ä–µ—à–µ–Ω–∏–∏ –∏ —Ç–æ—á–Ω–æ—Å—Ç–∏ –æ–Ω–æ–≥–æ, –∞ –≤–æ—Ç –ø–æ –¥–∞—Ç–∞—à–∏—Ç—É –Ω–∞ —Å–∞–º—ã–π –ø—Ä–æ–¥–≤–∏–Ω—É—Ç—ã–π 9800-—Å–µ–Ω—Å–æ—Ä, –º–∏–Ω–∏–º–∞–ª—å–Ω–æ–µ –≤—Ä–µ–º—è –º–µ–∂–¥—É –æ–ø—Ä–æ—Å–∞–º–∏ –∫–æ–æ—Ä–¥–∏–Ω–∞—Ç - 120 –º–∫—Å. –î–∞–ª—å—à–µ —Å–∞–º–∏ –ø–æ—Å—á–∏—Ç–∞–π—Ç–µ –∏ –ø—Ä–æ—Å–ª–µ–∑–∏—Ç–µ—Å—å. –ù–∞—Å—á–µ—Ç "—Ç–æ—á–Ω–æ –Ω–µ –ø–æ–¥—Ö–æ–¥–∏—Ç" –≤—ã, —è –¥—É–º–∞—é, –ø–æ—Ç–æ—Ä–æ–ø–∏–ª–∏—Å—å. –î–∞, —á–∞—Å—Ç–æ—Ç–∞ –∫–∞–¥—Ä–æ–≤ –Ω–∏–∂–µ, —á–µ–º —á–∞—Å—Ç–æ—Ç–∞ –∏–º–ø—É–ª—å—Å–æ–≤ –∫–æ—Ç–æ—Ä—ã–µ –∏–¥—É—Ç –Ω–∞ –ª–∞–∑–µ—Ä. –ù–æ –∏–∑ –¥–∞—Ç—á–∏–∫–∞ –º–æ–∂–Ω–æ –ø–æ–ª—É—á–∏—Ç—å —Ä–∞—Å—Å—Ç–æ—è–Ω–∏–µ (–≤ –æ—Ç—Å—á–µ—Ç–∞—Ö) –∫–æ—Ç–æ—Ä–æ–µ –ø—Ä–æ—à–µ–ª –¥–∞—Ç—á–∏–∫ –∑–∞ –≤—Ä–µ–º—è –º–µ–∂–¥—É –∏–º–ø—É–ª—å—Å–∞–º–∏. –¢–∞–∫ —á—Ç–æ –∏–Ω—Ñ–æ—Ä–º–∞—Ü–∏—è –æ —Å–∫–æ—Ä–æ—Å—Ç–∏ –Ω–µ —Ç–µ—Ä—è–µ—Ç—Å—è. –ù—É –∞ —Ç–æ, —á—Ç–æ —Ä–∞–±–æ—Ç–∞—Ç—å —Å —Ç–∞–∫–∏–º –¥–∞—Ç—á–∏–∫–æ–º –ø—Ä–∏–π–¥–µ—Ç—Å—è –∏–Ω–∞—á–µ, —á–µ–º —Å –æ–±—ã—á–Ω—ã–º –æ–ø—Ç–∏—á–µ—Å–∫–∏–º —ç–Ω–∫–æ–¥–µ—Ä–æ–º, –±—ã–ª–æ –ø–æ–Ω—è—Ç–Ω–æ —Å —Å–∞–º–æ–≥–æ –Ω–∞—á–∞–ª–∞.
_________________
–ú–æ–∂–Ω–æ –¥–µ–ª–∞—Ç—å —á—Ç–æ —É–≥–æ–¥–Ω–æ –∏ –∫–∞–∫ —É–≥–æ–¥–Ω–æ. –û—Å–æ–±–µ–Ω–Ω–æ –µ—Å–ª–∏ –Ω–µ –∏–Ω—Ç–µ—Ä–µ—Å—É–µ—Ç —Ä–µ–∑—É–ª—å—Ç–∞—Ç.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
invNT
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –º–∞—Ä 25, 2016 09:47:46 |
|
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 6
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —Ñ–µ–≤ 09, 2011 14:54:22
–°–æ–æ–±—â–µ–Ω–∏–π: 48
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 5
|
|
–ê –≤ —á–µ–º —Å–º—ã—Å–ª –¥–∞—Ç—á–∏–∫–∞ –æ—Ç –º—ã—à–∏? –ì–Ω–∞—Ç—å—Å—è –∑–∞ —Ä–∞–∑—Ä–µ—à–µ–Ω–∏–µ–º? –¢–∞–∫ –ø—Ä–æ—â–µ —Å–∫—Ä–µ—Å—Ç–∏—Ç—å —ç–Ω–∫–æ–¥–µ—Ä–Ω—É—é –ª–µ–Ω—Ç—É HP —Å –¥–∞—Ç—á–∏–∫–æ–º –ø–æ–¥–∞—á–∏ –±—É–º–∞–≥–∏ (–æ–Ω –∞–Ω–∞–ª–æ–≥–æ–≤—ã–π), –±–ª–∞–≥–æ –æ–Ω–∏ –Ω–∞ –æ–¥–Ω—É —à–∏—Ä–∏–Ω—É —à—Ç—Ä–∏—Ö–æ–≤ —Ä–∞—Å—Å—á–∏—Ç–∞–Ω—ã. –ó–∞—Ç—Ä–∞—Ç - –Ω–∏ –∫–æ–ø–µ–π–∫–∏, —Ç.–∫. –∏ —Ç–æ, –∏ —Ç–æ –±–µ—Ä–µ—Ç—Å—è –∏–∑ –æ–¥–Ω–æ–≥–æ –ø—Ä–∏–Ω—Ç–µ—Ä–∞-–¥–æ–Ω–æ—Ä–∞. –î–ª—è —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è –≤ 8200dpi (–º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ–µ —Ä–∞–∑—Ä–µ—à–µ–Ω–∏–µ –≤—ã—à–µ—É–ø–æ–º—è–Ω—É—Ç–æ–≥–æ 9800 —Å–µ–Ω—Å–æ—Ä–∞ –æ—Ç –º—ã—à–∏) –Ω—É–∂–Ω–æ –æ—Ü–∏—Ñ—Ä–æ–≤—ã–≤–∞—Ç—å —Å–∏–≥–Ω–∞–ª —ç–Ω–∫–æ–¥–µ—Ä–∞ –≤ 42 –≥—Ä–∞–¥–∞—Ü–∏—è—Ö (—É –ª–µ–Ω—Ç—ã HP –ø–ª–æ—Ç–Ω–æ—Å—Ç—å 200lpi). –¢.–µ. 6 –±–∏—Ç –ê–¶–ü —Ç–µ–æ—Ä–µ—Ç–∏—á–µ—Å–∫–∏ –¥–∞—Å—Ç –Ω–∞–º —Ä–∞–∑—Ä–µ—à–µ–Ω–∏–µ –¥–æ 12800dpi. –í —Ä–µ–∂–∏–º–µ –ø–æ–∑–∏—Ü–∏–æ–Ω–∏—Ä–æ–≤–∞–Ω–∏—è –º–æ–∂–Ω–æ –¥–≤–∏–≥–∞—Ç—å –∫–∞—Ä–µ—Ç–∫—É –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ –º–µ–¥–ª–µ–Ω–Ω–æ, –ø–æ—ç—Ç–æ–º—É —Å –æ—Ü–∏—Ñ—Ä–æ–≤–∫–æ–π —Å–ø—Ä–∞–≤–∏—Ç—Å—è –±–æ—Ä—Ç–æ–≤–æ–π –ê–¶–ü –ª—é–±–æ–≥–æ –ú–ö. –ê –≤ —Ä–∞–±–æ—á–µ–º —Ä–µ–∂–∏–º–µ –∏ 200dpi - –∑–∞ –≥–ª–∞–∑–∞, —Ç.–∫. –Ω—É–∂–Ω–æ —Å—Ç–∞–±–∏–ª–∏–∑–∏—Ä–æ–≤–∞—Ç—å —Å–∫–æ—Ä–æ—Å—Ç—å –∏ –Ω–µ –≥–Ω–∞—Ç—å—Å—è –∑–∞ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–∏–µ–º "1 —Ç–∏–∫ —ç–Ω–∫–æ–¥–µ—Ä–∞=1 –ø–∏–∫—Å–µ–ª—å".
–ï—Å—Ç—å –ø–æ–¥–≤–æ–¥–Ω—ã–π –∫–∞–º–µ–Ω—å - —Å–¥–≤–∏–≥ —Ñ–∞–∑—ã —Å–∏–≥–Ω–∞–ª–∞ —ç–Ω–∫–æ–¥–µ—Ä–∞ —Å —É–≤–µ–ª–∏—á–µ–Ω–∏–µ–º —Å–∫–æ—Ä–æ—Å—Ç–∏ –¥–≤–∏–∂–µ–Ω–∏—è (–¥–æ 0.03–º–º), –Ω–æ —ç—Ç–æ –Ω–µ—Å–ª–æ–∂–Ω–æ –∫–æ–º–ø–µ–Ω—Å–∏—Ä–æ–≤–∞—Ç—å –ø—Ä–æ–≥—Ä–∞–º–º–Ω–æ.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
a5021
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –º–∞—Ä 25, 2016 14:26:30 |
|
–ö–∞—Ä–º–∞: 20
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 230
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç —Å–µ–Ω 13, 2013 13:11:31
–°–æ–æ–±—â–µ–Ω–∏–π: 6452
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
vilkin –ø–∏—Å–∞–ª(–∞): –Ø –Ω–µ –ø–æ–¥—É–º–∞–≤ —Å—Ä–∞–∑—É, –ø—Ä–∏–º–µ–Ω–∏–ª —Ç–∞–º BC817 –≤ –∫–æ—Ä–ø—É—Å–µ sot23. –ì—Ä–µ–µ—Ç—Å—è –¥–æ –¥—ã–º–∞ –∏ —Ç–µ–ø–ª–æ –æ—Ç –µ–≥–æ –∫–æ—Ä–ø—É—Å–∞ –Ω–µ –æ—Ç–≤–µ—Å—Ç–∏... –¢–µ –∂–µ 2222–ê –µ—Å—Ç—å –≤ –∫–æ—Ä–ø—É—Å–∞—Ö SOT223,  –ø—Ä–æ–¥–∞—é—Ç—Å—è –Ω–∞ –∞–ª–∏ (–æ—Ç–∫—É–¥–∞, —Å–æ–±—Å—Ç–≤–µ–Ω–Ω–æ –∏ –∫–∞—Ä—Ç–∏–Ω–∫–∞) –∏ —Å—Ç–æ—è—Ç –Ω–µ –¥–æ—Ä–æ–≥–æ. –ö–∞–∫ –Ω–∞—Ä–∏—Å–æ–≤–∞—Ç—å –≤–æ–∫—Ä—É–≥ –Ω–µ–≥–æ –ø–æ–ª–∏–≥–æ–Ω –Ω–∞ –ø–ª–∞—Ç–µ –∏ –æ–±–µ—Å–ø–µ—á–∏—Ç—å —Ö–æ—Ä–æ—à–∏–π —Ç–µ–ø–ª–æ–æ—Ç–≤–æ–¥, –≤—Å–µ, —è –¥—É–º–∞—é, –∏ –±–µ–∑ –º–µ–Ω—è –∑–Ω–∞—é—Ç. –ß–µ—Ç –Ω–µ —Å–æ–æ–±—Ä–∞–∂—É, –∞ –º–æ—Å—Ñ–µ—Ç –≤–º–µ—Å—Ç–æ –¢1 —Ç—É—Ç –Ω–µ –ø–æ–∫–∞—Ç–∏—Ç? –°–æ —Å—Ç–∞—Ä—ã—Ö –º–∞—Ç–µ—Ä–∏–Ω—Å–∫–∏—Ö –ø–ª–∞—Ç –∏–ª–∏ –≤–∏–¥–µ–æ–∫–∞—Ä—Ç –º–æ–∂–Ω–æ –Ω–∞–¥—Ä–∞—Ç—å –≤–µ—Å—å–º–∞ –ø—Ä–∏–ª–∏—á–Ω—ã—Ö –º–æ—Å—Ñ–µ—Ç–æ–≤ —Å —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ–º –æ—Ç –ª–æ–≥–∏—á–µ—Å–∫–∏—Ö —É—Ä–æ–≤–Ω–µ–π. –ú–æ—â–Ω—ã–µ, –ø–æ–¥ –ø–µ—á–∞—Ç–Ω—ã–π –º–æ–Ω—Ç–∞–∂, –±—ã–≤–∞—é—Ç –≤ –∫–æ–º–ø–∞–∫—Ç–Ω—ã—Ö –∫–æ—Ä–ø—É—Å–∞—Ö (TO252), –±—ã–≤–∞—é—Ç –ø–æ–±–æ–ª—å—à–µ (TO263). vilkin –ø–∏—Å–∞–ª(–∞): –£ –Ω–∞—Å –∫–∞–∫ —Ñ–∏–∑–∏—á–µ—Å–∫–æ–µ –ª–∏—Ü–æ –Ω–µ —Å–º–æ–≥ –Ω–∏ –∫–∏—Å–ª–æ—Ç –ø–æ–∫–∞ –∫—É–ø–∏—Ç—å –Ω–∏ –≥–∏–ø–æ—Ñ–æ—Å—Ñ–∏—Ç–∞ –∫–∞–ª—å—Ü–∏—è. –ò—â–∏—Ç–µ –∑–Ω–∞–∫–æ–º—Å—Ç–≤–∞ –≤ –ø—Ä–æ–º—ã—à–ª–µ–Ω–Ω–æ—Å—Ç–∏. –Ø, –∫–æ–≥–¥–∞ —Å–æ–ª—è–Ω–∫–∞ –ø–æ–Ω–∞–¥–æ–±–∏–ª–∞—Å—å, –¥–æ–±—ã–ª —É —Å–ø–µ—Ü–æ–≤ –ø–æ –∫–æ—Ç–µ–ª—å–Ω–æ–º—É –æ–±–æ—Ä—É–¥–æ–≤–∞–Ω–∏—é.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
mial
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –º–∞—Ä 25, 2016 20:51:41 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
 |
–ö–∞—Ä–º–∞: 95
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2207
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —è–Ω–≤ 06, 2010 23:31:56
–°–æ–æ–±—â–µ–Ω–∏–π: 3254
–û—Ç–∫—É–¥–∞: –ë–æ—Ä–æ–≤–∏—á–∏, –ù–æ–≤–≥. –æ–±–ª.
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ú–µ–¥–∞–ª–∏: 1
")
|
–ü—Ä–∏–Ω–µ—Å–ª–∏ –º–Ω–µ —Å–µ–≥–æ–¥–Ω—è –≤–æ—Ç —Ç–∞–∫–æ–π –¥–∏—Å–ø–ª–µ–π—á–∏–∫ —Å –¥–∞—Ç—á–∏–∫–æ–º –∏ –º–∞–≥–Ω–∏—Ç–Ω–æ–π –ª–µ–Ω—Ç–æ–π.   –î–∞—Ç—á–∏–∫ –≤–æ—Ç —Ç–∞–∫–æ–π.   –î–∏—Å–ø–ª–µ–π—á–∏–∫ —Å—á–∏—Ç–∞–µ—Ç —Å —Ç–æ—á–Ω–æ—Å—Ç—å—é 0.1 –º–º, –Ω–∞ —Å–∞–π—Ç–µ –∑–∞—è–≤–ª–µ–Ω–æ —á—Ç–æ –º–æ–∂–µ—Ç —Å—á–∏—Ç–∞—Ç—å –¥–æ 0.01 –º–º. –°—É—Ç—å –Ω–µ –≤ —ç—Ç–æ–º. –ù–µ –ø–æ–Ω–∏–º–∞—é —á—Ç–æ –≤—ã–¥–∞–µ—Ç —Å–µ–Ω—Å–æ—Ä. –ö–∞–∫ —è –Ω–∏ —Å–º–æ—Ç—Ä–µ–ª —Ç–∞–º –∫—Ä–æ–º–µ –ø–æ—Å—Ç–æ—è–Ω–∫–∏ 1.3 –≤–æ–ª—å—Ç–∞ –Ω–∏—á–µ–≥–æ –Ω–µ—Ç. –°–∞–º –ø—Ä–∏–±–æ—Ä—á–∏–∫ –ø–∏—Ç–∞–µ—Ç—Å—è –æ—Ç 3 –≤–æ–ª—å—Ç. –° —Å–µ–Ω—Å–æ—Ä–∞ –∏–¥–µ—Ç 4 –ø—Ä–æ–≤–æ–¥–∞ –∏ —ç–∫—Ä–∞–Ω. 1 –º–∞—Å—Å–∞, 1 –ø–∏—Ç–∞–Ω–∏–µ 3 –≤–æ–ª—å—Ç–∞, 2 –≤—ã—Ö–æ–¥–∞. –ï—Å–ª–∏ –ø–æ–º–µ–Ω—è—Ç—å –≤—ã—Ö–æ–¥—ã –º–µ—Å—Ç–∞–º–∏, —Ç–æ –Ω–∞–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Å—á–µ—Ç–∞ –º–µ–Ω—è–µ—Ç—Å—è. –ü–æ –∏–¥–µ–µ –¥–æ–ª–∂–µ–Ω –±—ã—Ç—å –∫–≤–∞–¥—Ä–∞—Ç—É—Ä–Ω—ã–π –≤—ã—Ö–æ–¥. –°–º–æ—Ç—Ä–µ–ª Fluke 124 —Å–æ —â—É–ø–æ–º 1:10, –Ω–∏ —Ñ–∏–≥–∞ –Ω–µ—Ç. –ù–∏ –∫—Ç–æ –Ω–µ —Å—Ç–∞–ª–∫–∏–≤–∞–ª—Å—è —Å —Ç–∞–∫–∏–º–∏ —à—Ç—É–∫–∞–º–∏?
_________________
–ü—Ä–æ—Ç–æ—Ç–∏–ø—ã –ø–µ—á–∞—Ç–Ω—ã—Ö –ø–ª–∞—Ç –Ω–∞ –∑–∞–∫–∞–∑ https://radiokot.ru/forum/viewtopic.php?f=54&t=122701
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
bifurkas
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –º–∞—Ä 25, 2016 22:07:43 |
|
| –ü—Ä–æ—Ä–µ–∑–∞–ª–∏—Å—å –∑—É–±—ã |
 |
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 85
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç —Ñ–µ–≤ 02, 2010 21:25:18
–°–æ–æ–±—â–µ–Ω–∏–π: 223
–û—Ç–∫—É–¥–∞: –ù.–ù–æ–≤–≥–æ—Ä–æ–¥
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–Ø –Ω–µ–¥–∞–≤–Ω–æ —Ü–∏—Ñ—Ä–æ–≤–æ–π —à—Ç–∞–Ω–≥–µ–Ω—Ü–∏—Ä–∫—É–ª—å –ø—Ä–∏—Å–ø–æ—Å–∞–±–ª–∏–≤–∞–ª –ø–æ–¥ –¥–∞—Ç—á–∏–∫ –ø–æ–ª–æ–∂–µ–Ω–∏—è –∏–Ω—Å—Ç—Ä—É–º–µ–Ω—Ç–∞ –Ω–∞ —Å—Ç–∞–Ω–∫–µ, —Ç–∞–º SPI –ø—Ä–æ—Ç–æ–∫–æ–ª, —Ç–æ–ª—å–∫–æ –æ–¥–Ω–æ–Ω–∞–ø—Ä–∞–≤–ª–µ–Ω–Ω—ã–π. –û—Å—Ü–∏–ª–ª–æ–≥—Ä–∞—Ñ —á–µ–≥–æ –ø–æ–∫–∞–∑—ã–≤–∞–µ—Ç –≤–æ –≤—Ä–µ–º—è –ø–µ—Ä–µ–º–µ—â–µ–Ω–∏—è?
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
umpelev69
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –º–∞—Ä 25, 2016 22:27:13 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å —Å–µ–Ω 18, 2011 23:53:24
–°–æ–æ–±—â–µ–Ω–∏–π: 102
–û—Ç–∫—É–¥–∞: –ö—Ä–∞—Å–Ω–æ–¥–∞—Ä
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
_________________
–Ø –Ω–µ –≤–æ–ª—à–µ–±–Ω–∏–∫, —è —Ç–æ–ª—å–∫–æ —É—á—É—Å—å
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Seriyvolk
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –º–∞—Ä 26, 2016 00:45:43 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
 |
–ö–∞—Ä–º–∞: 93
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2157
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –º–∞–π 05, 2012 20:19:55
–°–æ–æ–±—â–µ–Ω–∏–π: 4961
–û—Ç–∫—É–¥–∞: –ú–∏–Ω—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 3
|
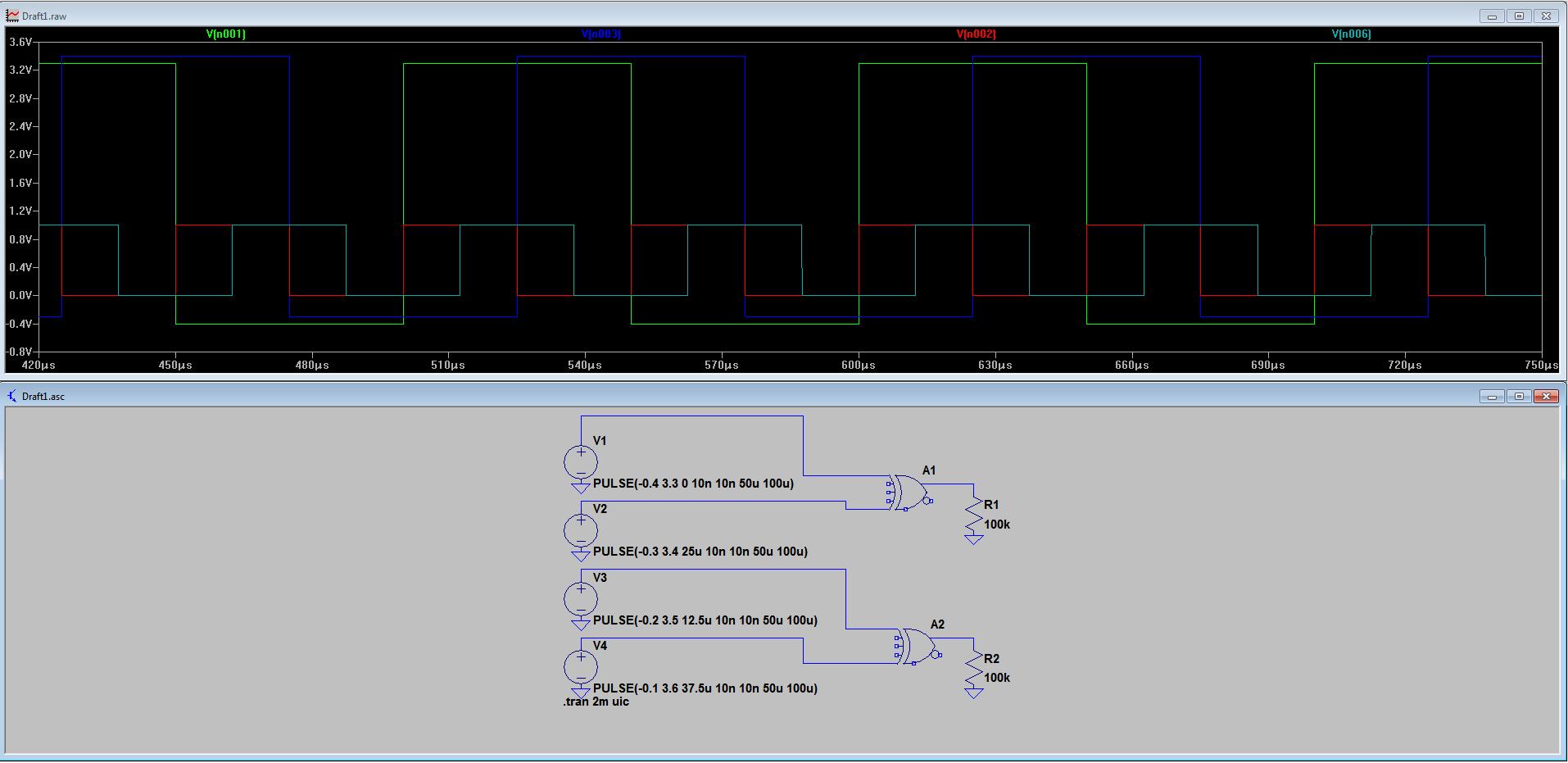
–¢–æ–≤–∞—Ä–∏—â invNT, —Å–∞–º —Ç–æ–≥–æ –Ω–µ –∑–Ω–∞—è, –Ω–∞—Ç–æ–ª–∫–Ω—É–ª –º–µ–Ω—è –Ω–∞ –∏–Ω—Ç–µ—Ä–µ—Å–Ω–µ–π—à—É—é –º—ã—Å–ª—é!  –ù–µ —Å–º–æ–≥ —É—Å–Ω—É—Ç—å, –ø–æ–∫–∞ –Ω–µ –¥–æ–±–∏–ª –µ—ë.  –î–æ–ø—É—Å—Ç–∏–º, —É –Ω–∞—Å –µ—Å—Ç—å —Å—Ç–∞–Ω–¥–∞—Ä—Ç–Ω–∞—è –ª–µ–Ω—Ç–∞ –Ω–∞ 150 LPI. –ò —á—Ç–æ–±—ã —É–≤–µ–ª–∏—á–∏—Ç—å –µ—ë —Ä–∞–∑—Ä–µ—à–µ–Ω–∏–µ –≤–¥–≤–æ–µ, –Ω—É–∂–Ω–æ –≤—Å–µ–≥–æ –ª–∏—à—å –ø–æ—Å—Ç–∞–≤–∏—Ç—å –¥–≤–∞ —ç–Ω–∫–æ–¥–µ—Ä–∞, –Ω–æ —Å–æ —Å–¥–≤–∏–≥–æ–º –º–µ–∂–¥—É –Ω–∏–º–∏ –≤ 90 –≥—Ä–∞–¥—É—Å–æ–≤ (–ø–æ–ª–æ–≤–∏–Ω—É —Ä–∏—Å–∫–∏). –°–∞–º–æ —Ä–∞—Å—Å—Ç–æ—è–Ω–∏–µ –º–µ–∂–¥—É —ç–Ω–∫–æ–¥–µ—Ä–∞–º–∏ –Ω–µ –ø—Ä–∏–Ω—Ü–∏–ø–∏–∞–ª—å–Ω–æ, –≥–ª–∞–≤–Ω–æ–µ –æ–±–µ—Å–ø–µ—á–∏—Ç—å –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç—å —Ä–µ–≥—É–ª–∏—Ä–æ–≤–∫–∏ —ç—Ç–æ–≥–æ –º–µ–∂—ç–Ω–∫–æ–¥–µ—Ä–Ω–æ–≥–æ —Ä–∞—Å—Å—Ç–æ—è–Ω–∏—è –≤ –ø—Ä–µ–¥–µ–ª–∞—Ö 1 LPI. –î–∞–ª–µ–µ –æ–±–∞ —Å–∏–≥–Ω–∞–ª–∞ –∫–∞–∂–¥–æ–≥–æ —ç–Ω–∫–æ–¥–µ—Ä–∞ –∫—Å–æ—Ä–∏–º –º–µ–∂–¥—É —Å–æ–±–æ–π, –∏ –Ω–∞ –≤—ã—Ö–æ–¥–µ –ø–æ–ª—É—á–∞–µ–º –º–µ–∞–Ω–¥—Ä —É–¥–≤–æ–µ–Ω–Ω–æ–π —á–∞—Å—Ç–æ—Ç—ã —Å —Ç–µ–º —Å–∞–º—ã–º —Å–¥–≤–∏–≥–æ–º 90 –≥—Ä–∞–¥—É—Å–æ–≤ (—Ä–µ–≥—É–ª–∏—Ä—É–µ–º—ã–º —Ä–∞—Å—Å—Ç–æ—è–Ω–∏–µ–º –º–µ–∂ —ç–Ω–∫–æ–¥–µ—Ä–∞–º–∏). –°—Ö–µ–º–∞ —Ä–∞–±–æ—Ç–∞–µ—Ç –±–µ–∑ –º–∞–ª–µ–π—à–∏—Ö –∑–∞–¥–µ—Ä–∂–µ–∫ –∏ –ø—Ä–æ—á–∏—Ö –ø–æ–¥–≤–æ–¥–Ω—ã—Ö –∫–∞–º–Ω–µ–π, –∏–º–µ—è —á–∏—Å—Ç–æ–µ —Ä–∞–∑—Ä–µ—à–µ–Ω–∏–µ 1200 –æ—Ç—Å—á—ë—Ç–æ–≤/–¥—é–π–º —Å –ª–µ–Ω—Ç—ã 150 LPI. –î–ª—è –ª—É—á—à–µ–≥–æ –ø–æ–Ω–∏–º–∞–Ω–∏—è –º–æ–∏—Ö –º—ã—Å–ª–µ–π –ø—Ä–∏–∫–ª–∞–¥—ã–≤–∞—é –∫–∞—Ä—Ç–∏–Ω–∫—É –∏–∑ —Å–∏–º—É–ª—è, –≥–¥–µ –∑–µ–ª—ë–Ω—ã–π –∏ —Å–∏–Ω–∏–π - —Å–∏–≥–Ω–∞–ª—ã –æ–¥–Ω–æ–≥–æ –∏–∑ —ç–Ω–∫–æ–¥–µ—Ä–æ–≤, –∞ –∫—Ä–∞—Å–Ω—ã–π –∏ –±–∏—Ä—é–∑–æ–≤—ã–π - —Ç–æ, —á—Ç–æ –ø–æ–ª—É—á–∞–µ—Ç—Å—è –Ω–∞ –≤—ã—Ö–æ–¥–µ –∏–∑ —Å—Ö–µ–º—ã. –û—Å—Ç–∞–ª–æ—Å—å —Ç–æ–ª—å–∫–æ –ø—Ä–∏–¥—É–º–∞—Ç—å, –∫–∞–∫ –º–µ—Ö–∞–Ω–∏—á–µ—Å–∫–∏ —Ä–µ–≥—É–ª–∏—Ä–æ–≤–∞—Ç—å —Ä–∞—Å—Å—Ç–æ—è–Ω–∏–µ –º–µ–∂ —ç–Ω–∫–æ–¥–µ—Ä–∞–º–∏ –∏ –Ω–∞—Ä—ã—Ç—å –≤—Ç–æ—Ä–æ–π –∞–Ω–∞–ª–æ–≥–∏—á–Ω—ã–π —ç–Ω–∫–æ–¥–µ—Ä–Ω—ã–π –¥–∞—Ç—á–∏–∫. 
_________________
–ü—Ä–∏–±–æ—Ä, –∑–∞—â–∏—â—ë–Ω–Ω—ã–π –ø—Ä–µ–¥–æ—Ö—Ä–∞–Ω–∏—Ç–µ–ª–µ–º, —Å–≥–æ—Ä–∞–µ—Ç –ø–µ—Ä–≤—ã–º, –∑–∞—â–∏—Ç–∏–≤ –ø—Ä–µ–¥–æ—Ö—Ä–∞–Ω–∏—Ç–µ–ª—å. –ó–∞–∫–æ–Ω –ú–µ—Ä—Ñ–∏.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Markusha
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –º–∞—Ä 26, 2016 01:39:23 |
|
| –ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É! |
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –∏—é–ª 23, 2015 17:33:48
–°–æ–æ–±—â–µ–Ω–∏–π: 34
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
Seriyvolk –ø–∏—Å–∞–ª(–∞): ... –í–æ—Ç –∂–µ –±–ª–∏–Ω. –í–µ–¥—å —Ç–∞–∫ –¥–µ–ª–∞—é—Ç —Å –Ω–∏–∑–∫–æ—Å–∫–æ—Ä–æ—Å—Ç–Ω—ã–º–∏ –ê–¶–ü, –≤—ã—Ç—è–≥–∏–≤–∞—è –º–∞–∫—Å–∏–º–∞–ª—å–Ω—É—é —á–∞—Å—Ç–æ—Ç—É –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞–Ω–∏—è. –ö–∞–∫–æ–≥–æ —Ö—Ä–µ–Ω–∞ –Ω–∏–∫—Ç–æ –Ω–µ –¥–æ–≥–∞–¥–∞–ª—Å—è –Ω–∞ –º–µ—Ö–∞–Ω–∏–∫—É –ø–µ—Ä–µ–Ω–µ—Å—Ç–∏ - –Ω–µ–ø–æ–Ω—è—Ç–Ω–æ. –í–µ–¥—å –¥–∞–∂–µ –≤ –º—ã—à–∫–µ (—à–∞—Ä–∏–∫–æ–≤–æ–π) –ø—Ä–∏–µ–º–Ω–∏–∫–∏ —Ä–∞–∑–Ω–µ—Å–µ–Ω—ã –Ω–∞ –ø–æ–ª–æ–≤–∏–Ω—É –¥–ª–∏–Ω—ã —â–µ–ª–∏. –ü—Ä–∞–≤–¥–∞ —Å —ç–ª–µ–∫—Ç—Ä–æ–Ω–∏–∫–æ–π –ø–æ–ø—Ä–æ—â–µ, —Å–¥–≤–∏–≥ –≤ 50% –≤—Ä–µ–º–µ–Ω–∏ —Ç–∞–º –ø–æ–ª—É—á–∏—Ç—å –æ—Ç–Ω–æ—Å–∏—Ç–µ–ª—å–Ω–æ –ø—Ä–æ—Å—Ç–æ. –ú–æ–∂–Ω–æ –ø–æ–ø—Ä–æ–±–æ–≤–∞—Ç—å —Ä–∞–∑–æ–±—Ä–∞—Ç—å –º–Ω–æ–≥–æ–æ–±–æ—Ä–æ—Ç–Ω—ã–π —Ä–µ–∑–∏—Å—Ç–æ—Ä - —Ç–∞–º —á–µ—Ä–≤—è—á–Ω–∞—è –ø–µ—Ä–µ–¥–∞—á–∞. –ò –∫–∞–∫ —Ç–æ –ø—Ä–∏–∫–æ–ª—Ö–æ–∑–∏—Ç—å –¥–ª—è —Å–º–µ—â–µ–Ω–∏—è 2-–≥–æ –¥–∞—Ç—á–∏–∫–∞ –æ—Ç–Ω–æ—Å–∏—Ç–µ–ª—å–Ω–æ –ø–µ—Ä–≤–æ–≥–æ. –ü–æ–ª—É—á–∏—Ç—Å—è –≤–µ—Å—å–º–∞ —Ç–æ—á–Ω–æ –≤—ã—Å—Ç–∞–≤–∏—Ç—å, –∫–∞–∫ –º–Ω–µ –∫–∞–∂–µ—Ç—Å—è:)
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
Neekeetos
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –º–∞—Ä 26, 2016 06:02:06 |
|
| –î–µ—Ä–∂–∏—Ç –ø–∞—è–ª—å–Ω–∏–∫ —Ö–≤–æ—Å—Ç–æ–º |
 |
–ö–∞—Ä–º–∞: 20
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 245
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü–Ω —Å–µ–Ω 18, 2006 11:16:05
–°–æ–æ–±—â–µ–Ω–∏–π: 993
–û—Ç–∫—É–¥–∞: –¢—É–ª–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
Seriyvolk –ø–∏—Å–∞–ª(–∞): –î–æ–ø—É—Å—Ç–∏–º, —É –Ω–∞—Å –µ—Å—Ç—å —Å—Ç–∞–Ω–¥–∞—Ä—Ç–Ω–∞—è –ª–µ–Ω—Ç–∞ –Ω–∞ 150 LPI. –ò —á—Ç–æ–±—ã —É–≤–µ–ª–∏—á–∏—Ç—å –µ—ë —Ä–∞–∑—Ä–µ—à–µ–Ω–∏–µ –≤–¥–≤–æ–µ, –Ω—É–∂–Ω–æ –≤—Å–µ–≥–æ –ª–∏—à—å –ø–æ—Å—Ç–∞–≤–∏—Ç—å –¥–≤–∞ —ç–Ω–∫–æ–¥–µ—Ä–∞, –Ω–æ —Å–æ —Å–¥–≤–∏–≥–æ–º –º–µ–∂–¥—É –Ω–∏–º–∏ –≤ 90 –≥—Ä–∞–¥—É—Å–æ–≤ (–ø–æ–ª–æ–≤–∏–Ω—É —Ä–∏—Å–∫–∏). –û–¥–∏–Ω –µ–¥–∏–Ω—Å—Ç–≤–µ–Ω–Ω—ã–π —ç–Ω–∫–æ–¥–µ—Ä —É–∂–µ –≤—ã–¥–∞–µ—Ç –∏–º–ø—É–ª—å—Å—ã —Å–æ —Å–¥–≤–∏–≥–æ–º 90 –≥—Ä–∞–¥—É—Å–æ–≤ –∫–∞–∫ –Ω–∞ –∫–∞—Ä—Ç–∏–Ω–∫–µ, –æ—Ç—Å—é–¥–∞ —Ä–∞–∑—Ä–µ—à–µ–Ω–∏–µ –≤ 4 —Ä–∞–∑–∞ –±–æ–ª—å—à–µ —á–µ–º –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ —à—Ç—Ä–∏—Ö–æ–≤ –Ω–∞ –¥—é–π–º. –≠—Ç–æ –≤ –ø—Ä–æ—à–∏–≤–∫–µ –∏—Å–ø–æ–ª—å–∑—É–µ—Ç—Å—è –¥–ª—è –ø–æ–ª—É—á–µ–Ω–∏—è 600–¥–ø–∏, –∫–∞–∂–¥—ã–π —Ñ—Ä–æ–Ω—Ç –∏ —Å–ø–∞–¥ –Ω–∞ –æ–±–æ–∏—Ö –≤—ã—Ö–æ–¥–∞—Ö —ç–Ω–∫–æ–¥–µ—Ä–∞ - –Ω–∞—á–∞–ª–æ –Ω–æ–≤–æ–π —Ç–æ—á–∫–∏. –ß—Ç–æ–±—ã —É–≤–µ–ª–∏—á–∏—Ç—å —Ä–∞–∑—Ä–µ—à–µ–Ω–∏–µ –Ω—É–∂–Ω–æ –¥–ª—è –∫–∞–∂–¥–æ–π —Å–º–µ–Ω—ã —Å–æ—Å—Ç–æ—è–Ω–∏—è —ç–Ω–∫–æ–¥–µ—Ä–∞ –≤—ã–¥–∞–≤–∞—Ç—å –Ω–µ—Å–∫–æ–ª—å–∫–æ —Ç–æ—á–µ–∫ —Å –Ω—É–∂–Ω–æ–π —Å–∫–æ—Ä–æ—Å—Ç—å—é –∫–∞–∫ —ç—Ç–æ –¥–µ–ª–∞—é—Ç –ø—Ä–∏–Ω—Ç–µ—Ä—ã, –æ–Ω–∏ –∏–º–µ—é—Ç —Ä–∞–∑—Ä–µ—à–µ–Ω–∏–µ –ø–æ—Ä—è–¥–∫–∞ 4800 —Å —ç—Ç–æ–π –∂–µ —Å–∞–º–æ–π —ç–Ω–∫–æ–¥–µ—Ä–Ω–æ–π –ª–µ–Ω—Ç–æ–π.
_________________
–ò–Ω—Ñ–æ—Ä–º–∞—Ü–∏—è –ø–æ RLC mini –Ω–∞—Ö–æ–¥–∏—Ç—Å—è >—Ç—É—Ç<
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Seriyvolk
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –º–∞—Ä 26, 2016 10:03:03 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
|
–ö–∞—Ä–º–∞: 93
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2157
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –º–∞–π 05, 2012 20:19:55
–°–æ–æ–±—â–µ–Ω–∏–π: 4961
–û—Ç–∫—É–¥–∞: –ú–∏–Ω—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
Neekeetos –ø–∏—Å–∞–ª(–∞): –û–¥–∏–Ω –µ–¥–∏–Ω—Å—Ç–≤–µ–Ω–Ω—ã–π —ç–Ω–∫–æ–¥–µ—Ä —É–∂–µ –≤—ã–¥–∞–µ—Ç –∏–º–ø—É–ª—å—Å—ã —Å–æ —Å–¥–≤–∏–≥–æ–º 90 –≥—Ä–∞–¥—É—Å–æ–≤ –∫–∞–∫ –Ω–∞ –∫–∞—Ä—Ç–∏–Ω–∫–µ, –æ—Ç—Å—é–¥–∞ —Ä–∞–∑—Ä–µ—à–µ–Ω–∏–µ –≤ 4 —Ä–∞–∑–∞ –±–æ–ª—å—à–µ —á–µ–º –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ —à—Ç—Ä–∏—Ö–æ–≤ –Ω–∞ –¥—é–π–º. –°–ø–∞—Å–∏–±–æ, –∫—ç–ø. –ê —Å–∫–∞–∑–∞—Ç—å —Ç–æ —á—Ç–æ —Ö–æ—Ç–µ–ª? –ö–∞—Ä—Ç–∏–Ω–∫—É, –º–Ω–æ–π –ø—Ä–∏–ª–æ–∂–µ–Ω–Ω—É—é —Å–º–æ—Ç—Ä–µ–ª? –°–º—ã—Å–ª –µ—ë –ø–æ–Ω—è–ª? 
_________________
–ü—Ä–∏–±–æ—Ä, –∑–∞—â–∏—â—ë–Ω–Ω—ã–π –ø—Ä–µ–¥–æ—Ö—Ä–∞–Ω–∏—Ç–µ–ª–µ–º, —Å–≥–æ—Ä–∞–µ—Ç –ø–µ—Ä–≤—ã–º, –∑–∞—â–∏—Ç–∏–≤ –ø—Ä–µ–¥–æ—Ö—Ä–∞–Ω–∏—Ç–µ–ª—å. –ó–∞–∫–æ–Ω –ú–µ—Ä—Ñ–∏.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Neekeetos
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –º–∞—Ä 26, 2016 15:10:50 |
|
| –î–µ—Ä–∂–∏—Ç –ø–∞—è–ª—å–Ω–∏–∫ —Ö–≤–æ—Å—Ç–æ–º |
|
–ö–∞—Ä–º–∞: 20
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 245
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü–Ω —Å–µ–Ω 18, 2006 11:16:05
–°–æ–æ–±—â–µ–Ω–∏–π: 993
–û—Ç–∫—É–¥–∞: –¢—É–ª–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
Seriyvolk –ø–∏—Å–∞–ª(–∞): –ê —Å–∫–∞–∑–∞—Ç—å —Ç–æ —á—Ç–æ —Ö–æ—Ç–µ–ª? –ö–∞—Ä—Ç–∏–Ω–∫—É, –º–Ω–æ–π –ø—Ä–∏–ª–æ–∂–µ–Ω–Ω—É—é —Å–º–æ—Ç—Ä–µ–ª? –°–º—ã—Å–ª –µ—ë –ø–æ–Ω—è–ª? –î–∞ –ª–∞–∂—É —Ç—ã –Ω–∞—Ä–∏—Å–æ–≤–∞–ª, —á—Ç–æ –Ω–µ–ø–æ–Ω—è—Ç–Ω–æ–≥–æ, —É—á–∏—Å—å —Å—á–∏—Ç–∞—Ç—å, —Ö–æ—á–µ—à—å —è –∑–∞ —Ç–µ–±—è –ø–æ—Å—á–∏—Ç–∞—é 90/2 = 45 –≥—Ä–∞–¥—É—Å–æ–≤, –Ω–∞ —Å—Ç–æ–ª—å–∫–æ –Ω–∞–¥–æ –∑–∞–¥–µ—Ä–∂–∞—Ç—å –≤—ã—Ö–æ–¥—ã –≤—Ç–æ—Ä–æ–≥–æ —ç–Ω–∫–æ–¥–µ—Ä–∞ —á—Ç–æ–±—ã —ç—Ç–æ —Ä–∞–±–æ—Ç–∞–ª–æ. –ù–æ –∏–∑ –∑–∞ –º–µ—Ö–∞–Ω–∏–∫–∏ —ç—Ç–æ –Ω–µ—Ü–µ–ª–µ—Å–æ–æ–±—Ä–∞–∑–Ω–æ, –ø—Ä–∏–¥–µ—Ç—Å—è –ª–µ–Ω—Ç—É –ø—Ä–∏–∂–∏–º–∞—Ç—å –∫ –æ–±–æ–∏–º —ç–Ω–∫–æ–¥–µ—Ä–∞–º.
_________________
–ò–Ω—Ñ–æ—Ä–º–∞—Ü–∏—è –ø–æ RLC mini –Ω–∞—Ö–æ–¥–∏—Ç—Å—è >—Ç—É—Ç<
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
vladogor
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –º–∞—Ä 26, 2016 16:25:27 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –º–∞—Ä 06, 2016 21:21:01
–°–æ–æ–±—â–µ–Ω–∏–π: 8
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ü–æ—Å—Ç–∞–≤–∏—Ç—å –æ—Ç–¥–µ–ª—å–Ω—ã–π –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä —Å –ê–¶–ü –∏ –ø—É—Å—Ç—å –¥–µ–∫–æ–¥–∏—Ä—É–µ—Ç —Å –±–æ–ª—å—à–∏–º —Ä–∞–∑—Ä–µ—à–µ–Ω–∏–µ–º. –ê –µ—Å–ª–∏ –º–µ—Ö–∞–Ω–∏—á–µ—Å–∫–∏ –Ω–∞–¥–æ —Ä–∞–∑–Ω–µ—Å—Ç–∏ –µ–Ω–∫–æ–¥–µ—Ä—ã, —Ç–æ –µ—Å—Ç—å —â—É–ø—ã –∞–≤—Ç–æ–º–æ–±–∏–ª—å–Ω—ã–µ, –∑–∞–∑–æ—Ä—ã –º–µ—Ä—è—Ç—å.....–û–Ω–∏ –∫–æ–Ω–µ—á–Ω–æ –Ω–µ –∫—Ä–∞—Ç–Ω—ã–µ –¥—é–π–º—É...–Ω–æ –º–æ–∂–µ—Ç –µ—Å—Ç—å –∞–º–µ—Ä–∏–∫–∞–Ω—Å–∫–∏–µ –∫—Ä–∞—Ç–Ω—ã–µ. –ù—É –∏ —Å–∞–º—ã–π –±—ã—Å—Ç—Ä—ã–π –≤–∞—Ä–∏–∞–Ω—Ç: –∞ –Ω–µ–ª—å–∑—è —Ä–∞—Å–ø–µ—á–∞—Ç–∞—Ç—å –Ω–∞ –ø–ª–µ–Ω–∫–µ –ª–∏–Ω–∏–∏ —É–≤–µ–ª–∏—á–µ–Ω–Ω—ã–º –≤ 2 —Ä–∞–∑–∞ –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ–º?
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
bifurkas
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –º–∞—Ä 26, 2016 18:06:40 |
|
| –ü—Ä–æ—Ä–µ–∑–∞–ª–∏—Å—å –∑—É–±—ã |
|
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 85
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç —Ñ–µ–≤ 02, 2010 21:25:18
–°–æ–æ–±—â–µ–Ω–∏–π: 223
–û—Ç–∫—É–¥–∞: –ù.–ù–æ–≤–≥–æ—Ä–æ–¥
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
vladogor –ø–∏—Å–∞–ª(–∞): –ù—É –∏ —Å–∞–º—ã–π –±—ã—Å—Ç—Ä—ã–π –≤–∞—Ä–∏–∞–Ω—Ç: –∞ –Ω–µ–ª—å–∑—è —Ä–∞—Å–ø–µ—á–∞—Ç–∞—Ç—å –Ω–∞ –ø–ª–µ–Ω–∫–µ –ª–∏–Ω–∏–∏ —É–≤–µ–ª–∏—á–µ–Ω–Ω—ã–º –≤ 2 —Ä–∞–∑–∞ –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ–º? –ß—Ç–æ-—Ç–æ —Å–µ–π—á–∞—Å –∫–æ–ª—å–Ω—É–ª–æ, –≤–∏–¥–∏–º–æ –ø–æ –ø—Ä–∏—á–∏–Ω–µ —Å–ª–∞–≤–Ω–æ–≥–æ —Å–æ–≤–µ—Ç—Å–∫–æ–≥–æ –ø—Ä–æ—à–ª–æ–≥–æ: –∞ –µ—Å–ª–∏ –Ω–∞ –º–∞–≥–Ω–∏—Ç–æ—Ñ–æ–Ω–Ω–æ–π –º–∞–≥–Ω–∏—Ç–Ω–æ–π –ª–µ–Ω—Ç–µ –∑–∞–ø–∏—Å–∞—Ç—å —á—Ç–æ-—Ç–æ –≤—Ä–æ–¥–µ –∑–≤—É–∫–æ–≤–æ–π —à–∫–∞–ª—ã –∏ —Å—á–∏—Ç—ã–≤–∞—Ç—å —Å –Ω–µ—ë –¥–∞–Ω–Ω—ã–µ —Å –ø–æ–º–æ—â—å—é —Ç–æ–π –∂–µ –º–∞–≥–Ω–∏—Ç–æ—Ñ–æ–Ω–Ω–æ–π –≥–æ–ª–æ–≤–∫–∏? –¢—É—Ç –ª–µ–≥–∫–æ –º–æ–∂–Ω–æ —Ä–µ–∞–ª–∏–∑–æ–≤–∞—Ç—å –∏ –∞–±—Å–æ–ª—é—Ç–Ω–æ–µ –ø–æ–ª–æ–∂–µ–Ω–∏–µ –∫–∞—Ä–µ—Ç–∫–∏.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
a5021
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –º–∞—Ä 26, 2016 18:15:52 |
|
–ö–∞—Ä–º–∞: 20
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 230
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç —Å–µ–Ω 13, 2013 13:11:31
–°–æ–æ–±—â–µ–Ω–∏–π: 6452
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ê –∫–∞–∫ —Å–∞–º–∞ –ª–µ–Ω—Ç–∞ –æ—Ç–Ω–µ—Å–µ—Ç—Å—è –∫ —Ç—ã—Å—è—á–∞–º –ø—Ä–æ–≥–æ–Ω–æ–≤ –≤ –ø—Ä–æ—Ü–µ—Å—Å–µ –∑–∞—Å–≤–µ—Ç–∫–∏ –æ–¥–Ω–æ–π —Ç–æ–ª—å–∫–æ –ø–ª–∞—Ç—ã? –¢–∞–º –∂–µ –º–µ—Ö–∞–Ω–∏—á–µ—Å–∫–∏–π –∏–∑–Ω–æ—Å –±—É–¥–µ—Ç –±—É–¥—å –∑–¥–æ—Ä–æ–≤.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Sailanser
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –º–∞—Ä 26, 2016 19:10:27 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
 |
–ö–∞—Ä–º–∞: 39
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 723
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —Ñ–µ–≤ 01, 2006 22:29:02
–°–æ–æ–±—â–µ–Ω–∏–π: 3120
–û—Ç–∫—É–¥–∞: –≥.–Ý–æ—Å—Ç–æ–≤-–Ω–∞-–î–æ–Ω—É
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
bifurkas –ø–∏—Å–∞–ª(–∞): vladogor –ø–∏—Å–∞–ª(–∞): –ù—É –∏ —Å–∞–º—ã–π –±—ã—Å—Ç—Ä—ã–π –≤–∞—Ä–∏–∞–Ω—Ç: –∞ –Ω–µ–ª—å–∑—è —Ä–∞—Å–ø–µ—á–∞—Ç–∞—Ç—å –Ω–∞ –ø–ª–µ–Ω–∫–µ –ª–∏–Ω–∏–∏ —É–≤–µ–ª–∏—á–µ–Ω–Ω—ã–º –≤ 2 —Ä–∞–∑–∞ –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ–º? –ß—Ç–æ-—Ç–æ —Å–µ–π—á–∞—Å –∫–æ–ª—å–Ω—É–ª–æ, –≤–∏–¥–∏–º–æ –ø–æ –ø—Ä–∏—á–∏–Ω–µ —Å–ª–∞–≤–Ω–æ–≥–æ —Å–æ–≤–µ—Ç—Å–∫–æ–≥–æ –ø—Ä–æ—à–ª–æ–≥–æ: –∞ –µ—Å–ª–∏ –Ω–∞ –º–∞–≥–Ω–∏—Ç–æ—Ñ–æ–Ω–Ω–æ–π –º–∞–≥–Ω–∏—Ç–Ω–æ–π –ª–µ–Ω—Ç–µ –∑–∞–ø–∏—Å–∞—Ç—å —á—Ç–æ-—Ç–æ –≤—Ä–æ–¥–µ –∑–≤—É–∫–æ–≤–æ–π —à–∫–∞–ª—ã –∏ —Å—á–∏—Ç—ã–≤–∞—Ç—å —Å –Ω–µ—ë –¥–∞–Ω–Ω—ã–µ —Å –ø–æ–º–æ—â—å—é —Ç–æ–π –∂–µ –º–∞–≥–Ω–∏—Ç–æ—Ñ–æ–Ω–Ω–æ–π –≥–æ–ª–æ–≤–∫–∏? –¢—É—Ç –ª–µ–≥–∫–æ –º–æ–∂–Ω–æ —Ä–µ–∞–ª–∏–∑–æ–≤–∞—Ç—å –∏ –∞–±—Å–æ–ª—é—Ç–Ω–æ–µ –ø–æ–ª–æ–∂–µ–Ω–∏–µ –∫–∞—Ä–µ—Ç–∫–∏.  –¢–æ–≥–¥–∞ —É–∂ –ø—Ä–æ—â–µ —Ñ–æ—Ä–º–∏—Ä–æ–≤–∞—Ç—å –∑–≤—É–∫–æ–≤–æ–π —Ñ–∞–π–ª –∏ –∑–∞–≥–Ω—è—Ç—å –µ–≥–æ –Ω–∞–ø—Ä—è–º—É—é –º–∏–Ω—É—è –≥–æ–ª–æ–≤–∫—É –∏ –ª–µ–Ω—Ç—É. —Ä.—ã –ì–æ—Å–ø–æ–¥–∞ –∫–æ—Ç—ã –≤–æ—Ç –≤—Ç–æ—Ä—É—é –Ω–µ–¥–µ–ª—é —Å–º–æ—Ç—Ä—é –≤ —Ç–µ–º—É —á—Ç–æ —Ç–æ —á–µ–º –¥–∞–ª—å—à–µ –≤ –ª–µ—Å, —Ç–µ–º —Ç–æ–ª—â–µ –ø–∞—Ä—Ç–∏–∑–∞–Ω—ã.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Seriyvolk
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –º–∞—Ä 26, 2016 20:59:16 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
|
–ö–∞—Ä–º–∞: 93
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2157
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –º–∞–π 05, 2012 20:19:55
–°–æ–æ–±—â–µ–Ω–∏–π: 4961
–û—Ç–∫—É–¥–∞: –ú–∏–Ω—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 2
|
Neekeetos –ø–∏—Å–∞–ª(–∞): –ù–æ –∏–∑ –∑–∞ –º–µ—Ö–∞–Ω–∏–∫–∏ —ç—Ç–æ –Ω–µ—Ü–µ–ª–µ—Å–æ–æ–±—Ä–∞–∑–Ω–æ, –ø—Ä–∏–¥–µ—Ç—Å—è –ª–µ–Ω—Ç—É –ø—Ä–∏–∂–∏–º–∞—Ç—å –∫ –æ–±–æ–∏–º —ç–Ω–∫–æ–¥–µ—Ä–∞–º. –ù–∞—Ö–µ—Ä –µ—ë –∫—É–¥–∞-—Ç–æ –ø—Ä–∏–∂–∏–º–∞—Ç—å? –í–∏–¥–∞—Ç—å —Ç—ã —á–µ–≥–æ-—Ç–æ –Ω–µ –¥–æ–≥–Ω–∞–ª. –ù—É –¥–∞ –∏ –ª–∞–¥–Ω–æ, –æ–±—ä—è—Å–Ω—è—Ç—å –¥–∞–ª—å—à–µ —Å–º—ã—Å–ª–∞ —è –Ω–µ –≤–∏–∂—É. –°–µ–±–µ —è —Ç–∞–∫ —Å–¥–µ–ª–∞—é, –æ—Å—Ç–∞–ª—å–Ω—ã–µ –∫–∞–∫ —Ö–æ—Ç—è—Ç, –∫–æ–ª—Ö–æ–∑ - –¥–µ–ª–æ –¥–æ–±—Ä–æ–≤–æ–ª—å–Ω–æ–µ.
_________________
–ü—Ä–∏–±–æ—Ä, –∑–∞—â–∏—â—ë–Ω–Ω—ã–π –ø—Ä–µ–¥–æ—Ö—Ä–∞–Ω–∏—Ç–µ–ª–µ–º, —Å–≥–æ—Ä–∞–µ—Ç –ø–µ—Ä–≤—ã–º, –∑–∞—â–∏—Ç–∏–≤ –ø—Ä–µ–¥–æ—Ö—Ä–∞–Ω–∏—Ç–µ–ª—å. –ó–∞–∫–æ–Ω –ú–µ—Ä—Ñ–∏.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Neekeetos
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –º–∞—Ä 27, 2016 11:00:58 |
|
| –î–µ—Ä–∂–∏—Ç –ø–∞—è–ª—å–Ω–∏–∫ —Ö–≤–æ—Å—Ç–æ–º |
|
–ö–∞—Ä–º–∞: 20
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 245
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü–Ω —Å–µ–Ω 18, 2006 11:16:05
–°–æ–æ–±—â–µ–Ω–∏–π: 993
–û—Ç–∫—É–¥–∞: –¢—É–ª–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 1
|
Seriyvolk –ø–∏—Å–∞–ª(–∞): –ù–∞—Ö–µ—Ä –µ—ë –∫—É–¥–∞-—Ç–æ –ø—Ä–∏–∂–∏–º–∞—Ç—å? –í–∏–¥–∞—Ç—å —Ç—ã —á–µ–≥–æ-—Ç–æ –Ω–µ –¥–æ–≥–Ω–∞–ª. –°–¥–≤–∏–≥ –ª–µ–Ω—Ç—ã –≤–Ω—É—Ç—Ä–∏ –∑–∞–∑–æ—Ä–∞ —ç–Ω–∫–æ–¥–µ—Ä–∞ –∫–∞–∫ —Ä–∞–∑ –¥–∞—Å—Ç –æ—à–∏–±–∫—É –≤ —Ç–≤–æ–∏ 45 –≥—Ä–∞–¥—É—Å–æ–≤ –¥–∞–∂–µ –±–æ–ª—å—à–µ, –ø–æ–ø—Ä–æ–±—É–π –Ω–∞ —Å—Ç–æ—è—á–µ–º —ç–Ω–∫–æ–¥–µ—Ä–µ –ø—Ä–æ–≤–µ—Ä—å. –ü–æ—ç—Ç–æ–º—É —Ç–µ–±–µ –ø—Ä–∏–¥–µ—Ç—Å—è –æ–±–µ—Å–ø–µ—á–∏—Ç—å –æ–¥–∏–Ω–∞–∫–æ–≤—ã–π –∑–∞–∑–æ—Ä –≤ –¥–≤—É—Ö —ç–Ω–∫–æ–¥–µ—Ä–∞—Ö, –∏–Ω–∞—á–µ –∫–∞–∫ –ø—Ä–∏–∂–∞–≤ –ª–µ–Ω—Ç—É –∫ –Ω–∏–º —Ç—ã —ç—Ç–æ –Ω–µ —Å–¥–µ–ª–∞–µ—à—å, –Ω–æ —ç—Ç–æ –ª–∞–∂–∞ –∫–∞–∫ –∏ —Ç–æ —á—Ç–æ —Ç—ã –¥–æ —Ç–æ–≥–æ –ø—Ä–µ–¥–ª–æ–∂–∏–ª. Seriyvolk –ø–∏—Å–∞–ª(–∞): –°–µ–±–µ —è —Ç–∞–∫ —Å–¥–µ–ª–∞—é, –æ—Å—Ç–∞–ª—å–Ω—ã–µ –∫–∞–∫ —Ö–æ—Ç—è—Ç, –∫–æ–ª—Ö–æ–∑ - –¥–µ–ª–æ –¥–æ–±—Ä–æ–≤–æ–ª—å–Ω–æ–µ. –ü–ª–æ—Ö–æ–π —É —Ç–µ–±—è –∫–æ–ª—Ö–æ–∑, –∞–≥—Ä–µ—Å—Å–∏–≤–Ω—ã–π.
_________________
–ò–Ω—Ñ–æ—Ä–º–∞—Ü–∏—è –ø–æ RLC mini –Ω–∞—Ö–æ–¥–∏—Ç—Å—è >—Ç—É—Ç<
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Alxim
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –º–∞—Ä 28, 2016 14:59:06 |
|
| –û—Ç–∫—Ä—ã–ª –≥–ª–∞–∑–∞ |
 |
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –¥–µ–∫ 06, 2011 15:26:52
–°–æ–æ–±—â–µ–Ω–∏–π: 42
–û—Ç–∫—É–¥–∞: –≥.–ë–µ–ª–æ–≥–æ—Ä—Å–∫ –ê–º—É—Ä—Å–∫–æ–π –æ–±–ª–∞—Å—Ç–∏
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–í–æ—Ç —ç—Ç–æ –∂–∞—Ä–∞ –Ω–∞ —Ñ–æ—Ä—É–º–µ. –í—Å–µ —Å–ø–æ—Ä—è—Ç, —Å—á–∏—Ç–∞—é—Ç —Ç–∞–∫—Ç—ã –ø—Ä–æ—Ü–æ–≤ –∏ –≤—Ä–µ–º—è... –ê —Å–ª–∞–±–æ –ø—Ä–∏–º–µ–Ω–∏—Ç—å –¥—Ä–∞–π–≤–µ—Ä A3972: Dual DMOS Full-Bridge Microstepping PWM Motor Driver –∏ —Ä–∞–∑–≥—Ä—É–∑–∏—Ç—å –ø—Ä–æ—Ü. –£–ø—Ä–∞–≤–ª–µ–Ω–∏–µ –ø–æ –∫–æ–º –ø–æ—Ä—Ç—É. –¢–∞–∫–∏–µ –∂–µ –µ—Å—Ç—å –∏ –¥–ª—è DC –º–æ—Ç–æ—Ä–æ–≤.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Neekeetos
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –õ–∞–∑–µ—Ä –¥–ª—è –∑–∞—Å–≤–µ—Ç–∫–∏ —Ñ–æ—Ç–æ—Ä–µ–∑–∏—Å—Ç–∞ - –∏–¥–µ—è –¥–ª—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏. –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –º–∞—Ä 28, 2016 16:42:34 |
|
| –î–µ—Ä–∂–∏—Ç –ø–∞—è–ª—å–Ω–∏–∫ —Ö–≤–æ—Å—Ç–æ–º |
|
–ö–∞—Ä–º–∞: 20
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 245
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü–Ω —Å–µ–Ω 18, 2006 11:16:05
–°–æ–æ–±—â–µ–Ω–∏–π: 993
–û—Ç–∫—É–¥–∞: –¢—É–ª–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 1
|
Alxim –ø–∏—Å–∞–ª(–∞): –ê —Å–ª–∞–±–æ –ø—Ä–∏–º–µ–Ω–∏—Ç—å –¥—Ä–∞–π–≤–µ—Ä A3972: Dual DMOS Full-Bridge Microstepping PWM Motor Driver –∏ —Ä–∞–∑–≥—Ä—É–∑–∏—Ç—å –ø—Ä–æ—Ü. —Ç–∞–∫ —è —Å–µ–π—á–∞—Å –∏ –¥–µ–ª–∞—é –∞–ª—å—Ç–µ—Ä–Ω–∞—Ç–∏–≤–Ω—É—é –ø—Ä–æ—à–∏–≤–∫—É –¥–ª—è –¥—Ä–∞–π–≤–µ—Ä–∞ –∫–æ—Ç–æ—Ä—ã–π –≤ –ø—Ä–∏–Ω—Ç–µ—Ä–µ —Å—Ç–æ—è–ª, —Ç–∞–º –≤–Ω—É—Ç—Ä–∏ –∫—Ä–æ–º–µ –≤—Å–µ–≥–æ –ø—Ä–æ—á–µ–≥–æ 4 –º–æ—Å—Ç–∞ –¥–ª—è –º–æ—Ç–æ—Ä–æ–≤. –í—á–µ—Ä–∞ —Ç–æ–ª—å–∫–æ –¥–æ–¥–µ–ª–∞–ª —Å–µ—Ä–≤–æ–ø—Ä–∏–≤–æ–¥ –Ω–∞ –¥–≤–∏–≥–∞—Ç–µ–ª—å –∫–∞—Ä–µ—Ç–∫–∏ –∏ –ø–æ–¥–∞—á—É –±—É–º–∞–≥–∏(–≤–º–µ—Å—Ç–æ —à–∞–≥–æ–≤–∏–∫–∞), –¥–≤–µ –æ—Å–∏. –û—Å—Ç–∞–ª–æ—Å—å –º–æ–¥—É–ª—è—Ç–æ—Ä –ª–∞–∑–µ—Ä–∞ –ø—Ä–æ–ø–∏—Å–∞—Ç—å...
_________________
–ò–Ω—Ñ–æ—Ä–º–∞—Ü–∏—è –ø–æ RLC mini –Ω–∞—Ö–æ–¥–∏—Ç—Å—è >—Ç—É—Ç<
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
|
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 97 –∏–∑ 506
|
[ –°–æ–æ–±—â–µ–Ω–∏–π: 10103 ] |
... , , , , , , ... |
|
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –Ω–∞—á–∏–Ω–∞—Ç—å —Ç–µ–º—ã
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –æ—Ç–≤–µ—á–∞—Ç—å –Ω–∞ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ —É–¥–∞–ª—è—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –¥–æ–±–∞–≤–ª—è—Ç—å –≤–ª–æ–∂–µ–Ω–∏—è
|
|
|