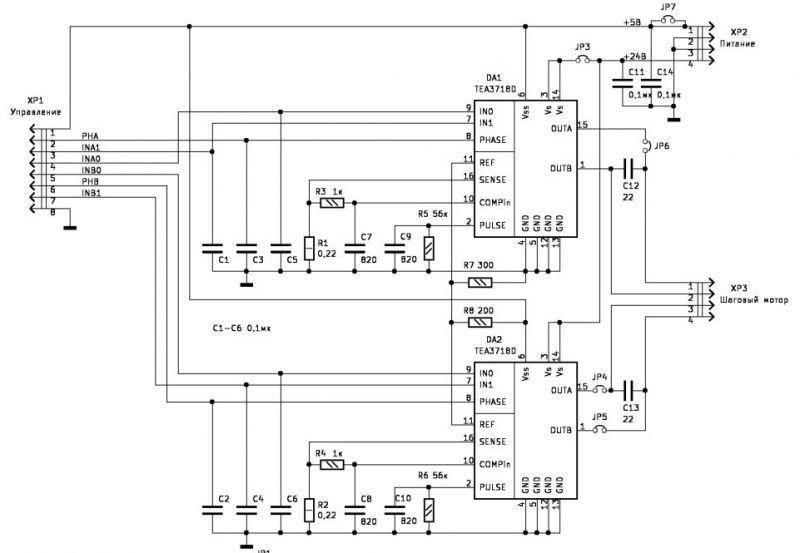
Здравствуйте. Что-то я не пойму. Вот есть драйвер шагового двигателя от принтера Samsung ML-4500. Вот кусок схемы:
 .
.
Вот http://manuals.by/files/Samsung%20ML-45 ... Manual.pdf
Есть такой шаговик: http://electronix.ru/redirect.php?http: ... 42L048.pdf PM42L-048-SYR4
На куске схемы видно, что 24 вольта относительно земли GND24 , и эта земля идет на 4,5,12,13 ножки драйвера.
С этим никаких проблем. Но вот на 6 ногу приходит +5 вольт, но относительно чего? GND5 тут не видно на куске, но она присутствует на делителе , с которого снимается Vref. Так как же мне запитывать эти +5 вольт?
И еще: I1 и I0 (7 и 9 ножки) соединенны вместе. Как я понимаю, в принтере шаговый двигатель вращается в режиме полного шага, судя по даташиту на TEA3718DP http://hghltd.yandex.net/yandbtm?lang=e ... 01&keyno=0
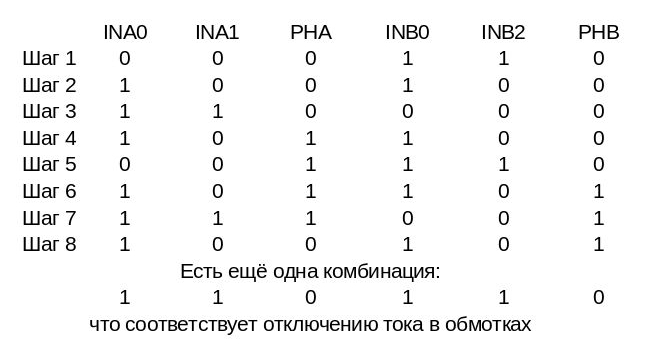
В итоге, что я имею:подаю 5в с отладочной платы на меге8, 24 вольта с лабораторного блока питания.. С атмеги8 запускаю перебор комбинаций для EGMOT_PHA и EGMOT_PHB (две микросхемы) в таком режиме:
1 1
0 1
0 0
1 0
1 1
0 1
..
(программа работает правильно)
на частоте 60 гц примерно. Шаговик только лишь слегка дрыгается в одной и той же позиции. При этом I0 и I1 двух микросхем висят на земле GND5 . Вращения нет
Вопрос: дело в GND5 ? или я чего-то не понимаю?
. Вот http://manuals.by/files/Samsung%20ML-45 ... Manual.pdf
Есть такой шаговик: http://electronix.ru/redirect.php?http: ... 42L048.pdf PM42L-048-SYR4
На куске схемы видно, что 24 вольта относительно земли GND24 , и эта земля идет на 4,5,12,13 ножки драйвера.
С этим никаких проблем. Но вот на 6 ногу приходит +5 вольт, но относительно чего? GND5 тут не видно на куске, но она присутствует на делителе , с которого снимается Vref. Так как же мне запитывать эти +5 вольт?
И еще: I1 и I0 (7 и 9 ножки) соединенны вместе. Как я понимаю, в принтере шаговый двигатель вращается в режиме полного шага, судя по даташиту на TEA3718DP http://hghltd.yandex.net/yandbtm?lang=e ... 01&keyno=0
В итоге, что я имею:подаю 5в с отладочной платы на меге8, 24 вольта с лабораторного блока питания.. С атмеги8 запускаю перебор комбинаций для EGMOT_PHA и EGMOT_PHB (две микросхемы) в таком режиме:
1 1
0 1
0 0
1 0
1 1
0 1
..
(программа работает правильно)
на частоте 60 гц примерно. Шаговик только лишь слегка дрыгается в одной и той же позиции. При этом I0 и I1 двух микросхем висят на земле GND5 . Вращения нет
Вопрос: дело в GND5 ? или я чего-то не понимаю?