Несмотря на то, что
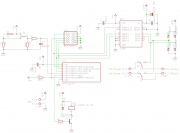
часть 1 отклика в сердцах почти не вызвала, выкладываю на суд общественности 2 часть доработки - пока в виде схемы:
 Зачем это нужно
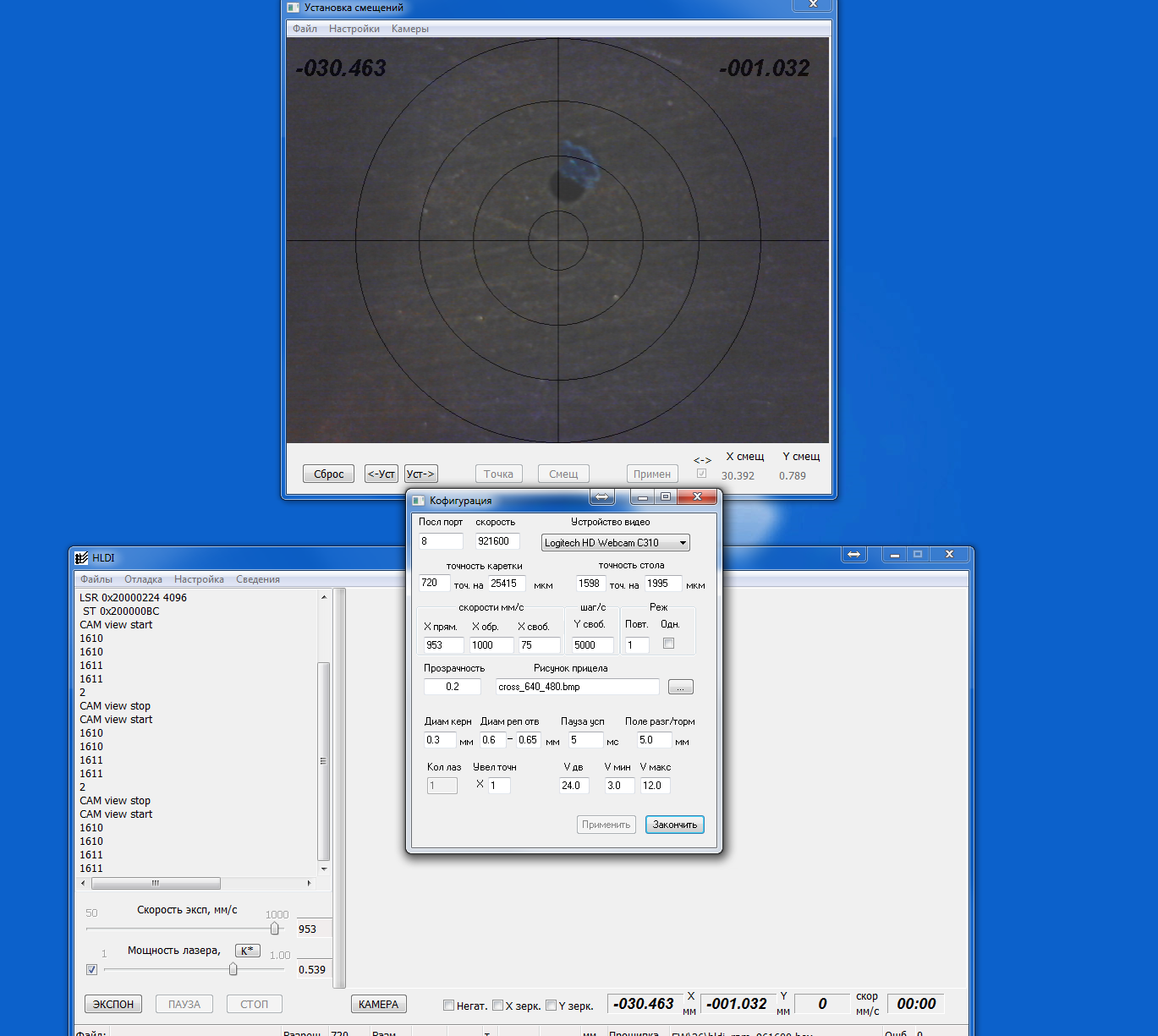
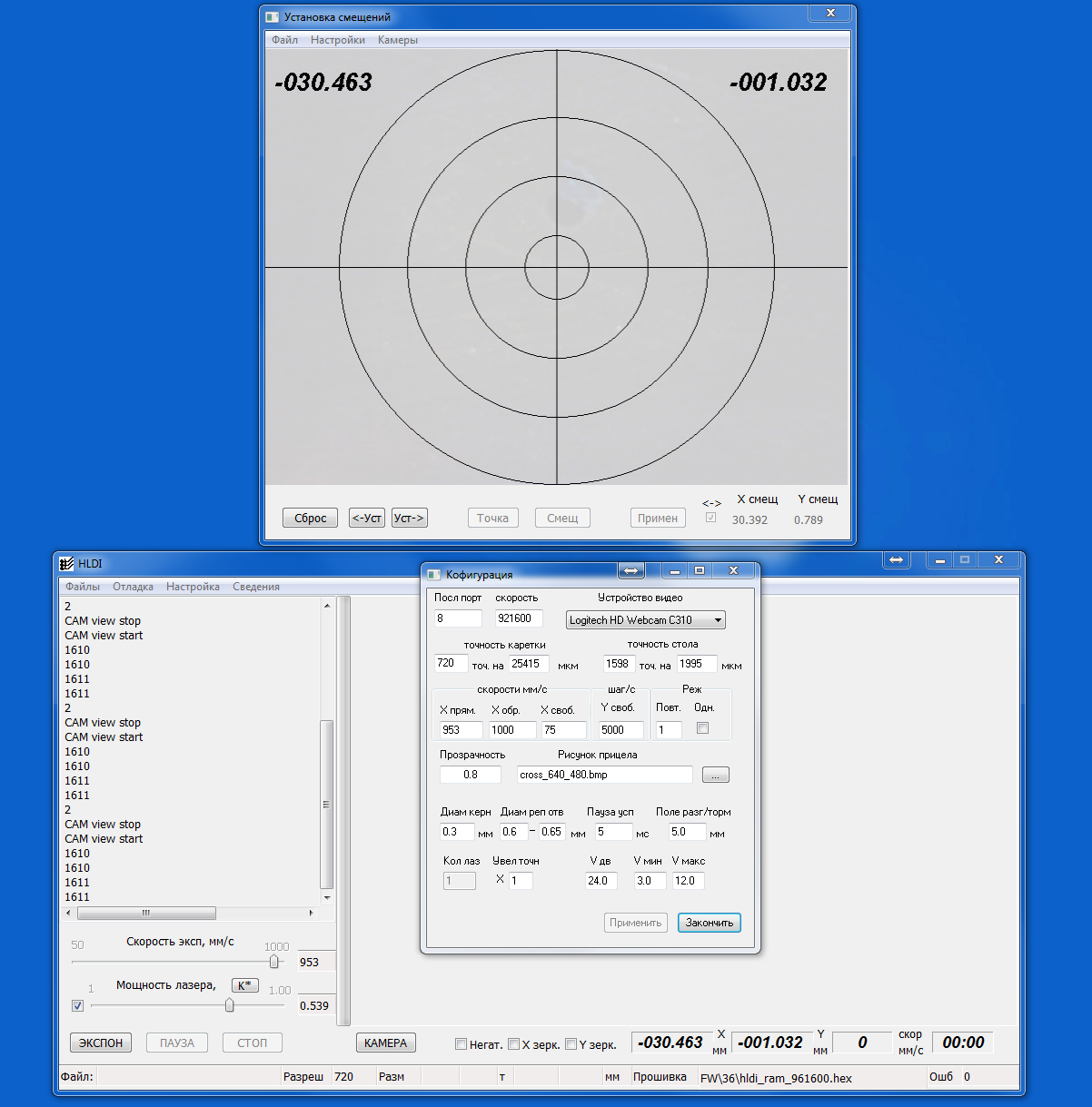
Зачем это нужно - для плавной настройки координаты Х. Чтобы не дрючить Shift-стрелки и не крутить ротор DC мотора руками. Лично меня это несколько раздражает.
 Зачем так сложно
Зачем так сложно - почти уверен, что автор установки мог бы решить эту задачу только программным способом - изменением кода HLDI.exe - но я не знаком ни с языком, на котором она написана, ни с МК STM32, и изучать это всё нет ни большого желания, ни времени, а самое главное - многие годы
тренировок опыта научили не лезть в чужой сложный код, если можно без этого обойтись.
Как оно должно работать - к разъёму Х1 подключается выход драйвера двигателя каретки. К разъёму Х2 - сам двигатель каретки. И через пару нормально замкнутых контактов реле K1 всё работает, как и обычно. До тех пор пока переключатель S1 не занял одно из крайних положений. МК ATtiny13A переключает контакты реле, определяет в какую сторону нужно сдвинуть каретку, и даёт команду драйверу L298 - каретка медленно едет до тех пор, пока переключатель S1 снова не займёт среднее положение, после чего МК ждёт ещё секунды 1.5-2 (если вдруг перескочили прицел и нужно сдвинуться назад) и переключает реле обратно.
Зачем использовать ещё один МК - чтобы можно было ШИМом регулировать скорость каретки и задавать удобное время задержки обратного переключения реле. А так да, можно обойтись и без МК, ШИМить генератором на NE555, а кнопки посадить напрямую на L298. Или вообще регулировать скорость подбором напряжения двигателя. Но это вряд ли будет проще, чем с МК.
Как можно улучшить схему - можно использовать другой МК с бОльшим количеством входов, и тогда можно подключить S1 нормально, а не через АЦП, и можно анализировать состояние сигналов DCIN основного контроллера. Тогда, если станок занят (каретка уже куда-то едет), переключение S1 не будет влиять на его работу. Но, ИМХО, это лишнее, потому что просто можно использовать мозг и не трогать S1 никогда, кроме как в режиме прицеливания.
А ещё можно через реле коммутировать не двигатель, а сами сигналы DCIN, подавая их с разных МК - тогда можно будет использовать основной драйвер каретки и избавиться от L298 и её обвязки. Но лично мне пока не хочется резать дорожки существующего контроллера установки, а в будущем видно будет.
Какие будут комментарии опытных товарищей?