TIM3 так изначально и планировал. Все ж из двух оставшихся 16 битных таймеров сделал 32 битный - раз есть такая возможность - надо попробовать, упрощает ж все. Частотомер удался, только протеус в конце подкачал - на высоких частотах тормозит, не измеряет, на низких измеряет. В принципе протеусом что-то можно посимулировать, все остальное надо в железе (лучше сразу, как подсказали).
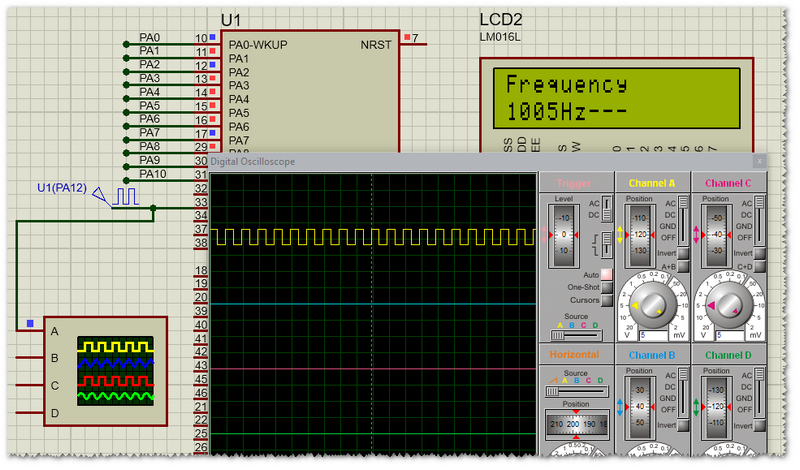
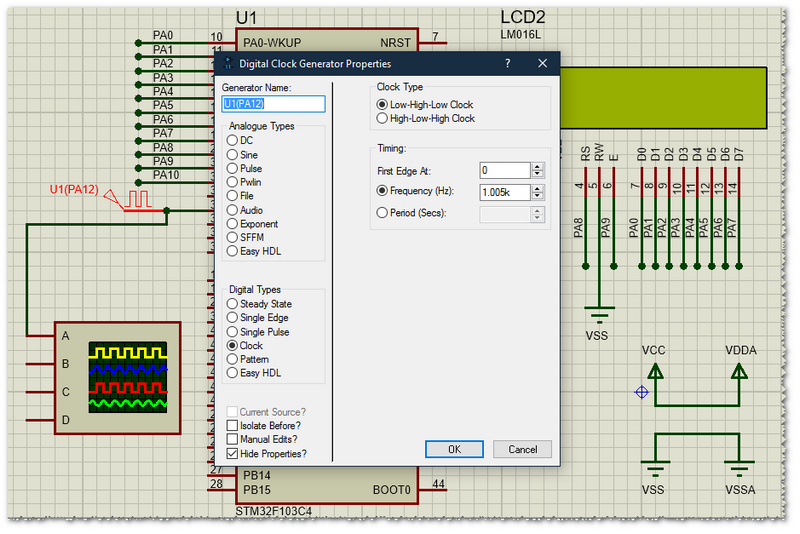
Задаем частоту входную 1005Гц:

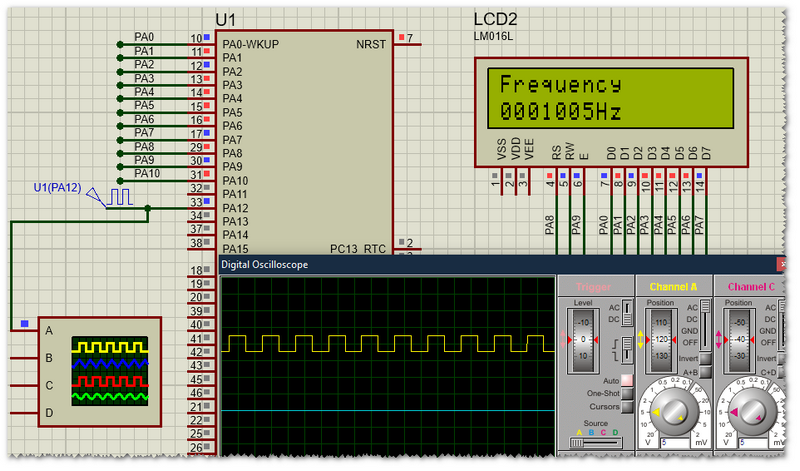
Измеряем нашим частотомером:
софтик:
заняло: Program Size: Code=928 RO-data=268 RW-data=12 ZI-data=1044
з.ы. "велосипед" заново изобретен, теперь меня возьмут на работу на частотомеропроизводящую фабрику
Задаем частоту входную 1005Гц:
Измеряем нашим частотомером:
софтик:
Спойлер
Код: Выделить всё
#include "stm32f103x6.h"
#include "hd44780_driver.h"
volatile uint32_t msTicks; // counts 1ms timeTicks
volatile uint32_t cntValue;
volatile uint8_t flagEndMeasure = 0;
char asc[20];
extern void Delay (uint32_t dlyTicks);
/*----------------------------------------------------------------------------
* SysTick_Handler:
*----------------------------------------------------------------------------*/
void SysTick_Handler(void)
{
msTicks++;
}
/*----------------------------------------------------------------------------
* Delay: delays a number of Systicks
*----------------------------------------------------------------------------*/
void Delay (uint32_t dlyTicks)
{
uint32_t curTicks;
curTicks = msTicks;
while ((msTicks - curTicks) < dlyTicks)
{
__NOP();
}
}
void itoa1(uint32_t binval)
{
uint32_t temp, val;
uint8_t binc, atemp;
val = binval;
atemp = '0';
temp = 1000000;
while (val >= temp)
{
atemp++;
val -= temp;
}
*(asc + 0) = atemp;
atemp = '0';
temp = 100000;
while (val >= temp)
{
atemp++;
val -= temp;
}
*(asc + 1) = atemp;
atemp = '0';
temp = 10000;
while (val >= temp)
{
atemp++;
val -= temp;
}
*(asc + 2) = atemp;
atemp = '0';
temp = 1000;
while (val >= temp)
{
atemp++;
val -= temp;
}
*(asc + 3) = atemp;
atemp = '0';
temp = 100;
while (val >= temp)
{
atemp++;
val -= temp;
}
*(asc + 4) = atemp;
atemp = '0';
binc = (char) val;
while (binc >= 10)
{
atemp++;
binc -= 10;
}
*(asc + 5) = atemp;
binc += '0';
*(asc + 6) = binc;
}
void InitTimers()
{
TIM3->ARR = 1000-1; //1000
TIM3->PSC = 8000-1; //8000000/8000 = 1000
TIM3->CR2 |= TIM_CR2_MMS_0; //Enable - the Counter enable signal, CNT_EN, is used as trigger output (TRGO). It is
//useful to start several timers at the same time or to control a window in which a slave timer is
//enabled. The Counter Enable signal is generated by a logic OR between CEN control bit
//and the trigger input when configured in gated mode.
//When the Counter Enable signal is controlled by the trigger input, there is a delay on TRGO,
//except if the master/slave mode is selected (see the MSM bit description in TIMx_SMCR
//register).
TIM3->DIER |= TIM_DIER_UIE; // Update interrupt enabled
TIM3->CR1 |= TIM_CR1_CEN | TIM_CR1_DIR | TIM_CR1_OPM; //Counter used as downcounter
//Counter stops counting at the next update event (clearing the bit CEN) Counter enabled
TIM1->PSC = 0;
TIM1->ARR = 0xFFFF;
TIM1->SMCR |= TIM_SMCR_ETF_1; // External trigger filter
//This bit-field then defines the frequency used to sample ETRP signal and the length of the
//digital filter applied to ETRP. The digital filter is made of an event counter in which N
//consecutive events are needed to validate a transition on the output: 0010: fSAMPLING=fCK_INT, N=4
TIM1->SMCR |= TIM_SMCR_ECE | TIM_SMCR_TS_1; //External clock mode 2 enabled. The counter is clocked by any active edge on the ETRF
//002: Internal Trigger 2 (ITR2) TIM3_TRGO
TIM1->SMCR |= TIM_SMCR_SMS_0 | TIM_SMCR_SMS_2; //101: Gated Mode - The counter clock is enabled when the trigger input (TRGI) is high. The
//counter stops (but is not reset) as soon as the trigger becomes low. Both start and stop of
//the counter are controlled.
TIM1->CR2 |= TIM_CR2_MMS_1; //010: Update - The update event is selected as trigger output (TRGO). For instance a master
//timer can then be used as a prescaler for a slave timer.
TIM1->CR1 |= TIM_CR1_CEN;
TIM2->SMCR |= TIM_SMCR_SMS_1 | TIM_SMCR_SMS_2 | TIM_SMCR_SMS_0; //111: External Clock Mode 1 - Rising edges of the selected trigger (TRGI)
//clock the counter.
TIM2->CR1 |= TIM_CR1_CEN;
NVIC_EnableIRQ(TIM3_IRQn);
}
void TIM3_IRQHandler(void)
{
TIM3->SR &= ~TIM_SR_UIF;
cntValue = (uint32_t)TIM1->CNT | (uint32_t)TIM2->CNT << 16;
flagEndMeasure = 1;
TIM2->CNT=0;
TIM1->CNT=0;
TIM3->CR1 |= TIM_CR1_CEN;
}
int main(void)
{
RCC->APB2ENR |= RCC_APB2ENR_IOPAEN | RCC_APB2ENR_TIM1EN;
RCC->APB1ENR |= RCC_APB1ENR_TIM2EN | RCC_APB1ENR_TIM3EN;
GPIOA->CRL |= (GPIO_CRL_MODE0_1 |
GPIO_CRL_MODE1_1 |
GPIO_CRL_MODE2_1 |
GPIO_CRL_MODE3_1 |
GPIO_CRL_MODE4_1 |
GPIO_CRL_MODE5_1 |
GPIO_CRL_MODE6_1 |
GPIO_CRL_MODE7_1 );
GPIOA->CRH |= (GPIO_CRH_MODE8_1 |
GPIO_CRH_MODE9_1 |
GPIO_CRH_MODE10_1 |
GPIO_CRH_MODE12_1 |
GPIO_CRH_MODE12_0 );
SysTick_Config(8000000UL / 1000); // SysTick 1 msec interrupts
LCD(COM, 0x30);
Delay(4);
LCD(COM, 0x30);
Delay(2);
LCD(COM, 0x30);
Delay(2);
LCD(COM, 0x3C);
Delay(2);
LCD(COM, 0x0C);
Delay(2);
LCD(COM, 0x01);
Delay(2);
LCD(COM, 0x80);
Delay(2);
LCD_STRING("Frequency");
LCD(COM, 0xC0);
LCD_STRING("---------");
InitTimers();
while (1)
{
while(flagEndMeasure == 0);
itoa1(cntValue);
flagEndMeasure = 0;
LCD(COM, 0xC0);
LCD_STRING(asc);
LCD_STRING("Hz");
GPIOA->ODR ^=(uint16_t)(1<<10);
}
}з.ы. "велосипед" заново изобретен, теперь меня возьмут на работу на частотомеропроизводящую фабрику