Народ, подскажите правильно ли я считаю, вроде бы все сходится но т.к. обычно расчеты такие не проделываю хотел бы убедиться что ничего не напутал.
Считаю время которое необходимо чтобы каретка проделала полный путь от крайнего левого в крайнее правое положение в секундах использую DC brushed мотор, для конкретики берем следующие цифры:
L - длина оси каретки = 170мм
m - вес каретки с нагрузкой = 0.5кг
Ts - начальный момент мотора на скорости 0 согласно спецификации на мотор
http://www.ebay.com/itm/301892248565?ul_noapp=true = 0.65 Nm
Wn - максимальная угловая скорость = (4000rpm / 60) * (2 * pi()) = ~418.87902047863909846133 Радиан в секунду
W - рабочая скорость = 2000rpm = ~209.43951023931954923067 Радиан в секунду
r - радиус муфты которую крутит двигатель и через ременную передачу передает усилие каректе = 40мм / (2 * pi()) = ~6.36619772367581343076мм // Стандартная GT2 мутфа от 3д принтера
Известно что типичный DC мотор с щетками имеет момент обратно пропорциональный угловой скорости -
http://lancet.mit.edu/motors/motors3.html
Для простоты вычислений примем что МОМЕНТ ПОСТОЯНЕН ОТ W = 0 до W = 2000 RPM (наша рабочая скорость) и равен реальному моменту на W = 2000 RPM, т.е. мы сознательно заменьшаем момент чтобы избежать применение интегралов для конкретно этого примера, если расчеты с этим допущением верны то не составит труда заменить статичный момент функциональным, проинтегрировать и получить более приближенные к реальности расчеты, в то время как текущие расчеты должны быть гораздо скоромнее чем может мотор. Просьба учесть это при рассмотрении вычислений. Также уберем все трения, аэродинамическое сопротивление и прочие минорные силы за счет пониженного момента.
Начинаем считать:
Найдем силу действующую на каретку:
для этого найдем момент, согласно формуле он равен:
T = Ts - W * Ts / Wn = 32.5 Н * см
Найдем силу действующую на каретку T = F * r; F = T / r = 32.5 / 0.636619772367581343076 = 51.05088062083414012498 Ньютонов
Найдем ускорение каретки F = m * a; a = F / m = 51.05088062083414012498 / 0.5 кг = 102.10176124166828024996 м * с^2
Рабочая скорость W у нас = 2000rpm, поэтому
максимальная скорость каретки будет V = 2000 / 60 * 40мм = 1.33333333333333333333333 метра в секунду
Найдем время t нужное чтобы ускорить каретку со скорости 0 до рабочей скорости V,
V = a * t
1.33333333333333333333333 = 102.10176124166828024996 * t
t = ~0.01305886712548884806 или примерно 13 миллисекунд
поскольку ускорение из за статического момента у нас постоянное то используем обычную формулу из гравитации для нахождения времени.
ускорение a = 102.10176124166828024996 м * с^2
V = a * t
проинтегрировав Интеграл{ V(t)dt }
получим путь Sускорения = (a * t * t) / 2 = a * t^2/2 = 102.10176124166828024996 * 0.01305886712548884806 ^ 2 / 2 = 0.00870591141699256537 = ~8.7 мм, это путь который требуется чтобы каретка ускорилась до рабочей скорости V = 2000 RPM = 1.[3] м * с
Поскольку ускорение это понижение и повышение скорсти то путь Sускр и время t будут одинаковы в начале и конце пути.
Получится путь который каретка будет преодолевать на рабочей скорости Sраб = L - 2 * Sускорения = 0.17 - 0.00870591141699256537 = 0.16129408858300743463 м
найдем требуемое время для каретки чтобы проделать этот путь на раб. скорости:
S = V * t, t = S / V = 0.16129408858300743463 / 1.33333333333333333333333 = 0.12097056643725557597 секунд
Теперь сложим время ускорений и основного пути t = 2 * 0.01305886712548884806 + 0.12097056643725557597 = 0.14708830068823327209 секунд
Получим частоту движения каретки в герцах freq = 1 / 0.14708830068823327209 = 6.79863724933221500377 Гц
Учитывая что ускорения будут проиходить быстрее (поскольку момент на начальных скоростях больше) и у нас есть приличный запас по рабочей скорости (поднять обороты на 1000-1500) то получается вполне хорошие цифры
Собственно используя линейную функцию момента и съинтегриров ускорение каретки с помощью этой функции, можно найти более приближенный к реальности нужный путь и время для ускорения каректки в начале и конце оси.
Правильны ли эти расчеты с допуском того что момент статичен на заданном интервале скоростей мотора, правильны ли единицы измерений и соответствующие конвертации?
====================
P.S. Здесь пример того же самого расчета только с использованием нормального, приближенного к реальности динамического момента, правда не учтены силы трения и инерция ротора, хотя масса каретки взята пол киллограма что впринципе может погасить инерцию ротора.
Найдем время t за которое каретка разовьет работчую скорость V = 2 м/с
W раб будет = V / r = 2 / 0.00636619772367581343076 = 314.15926535897932384603 радиан в секунду
T(W) = Ts - W * Ts / Wn
заменим угловую на линейную скорость
T(V) = Ts - (V / r) * Ts / Wn = 0.65-(V*1000*2*π)/(40)*(0.65)/(418) = (-65)/(836)V*π+(13)/(20)
F(V) = T(V) * r = T(V)*(1000*2*π)/(40) = (-1625)/(418)V*π^(2)+(65)/(2)π
F(V) = m * a(V)
a(V) = F(V) / m = (-1625)/(209)V*π^(2)+65π
Поскольку скорость равна V = a * t, то для нашего случая с функциональными зависимостями имеем время нужное для развития скорости V проинегрировав по V от 0 до 2м/c (до рабочей скорости):
t = ∫(1 / a(V)) * dV = ∫(1 / A(V)) * dV = ∫(1 / (-1625)/(209)V*π^(2)+65π) dV = (-209*ln(-(50π-209))+209ln(209))/(1625π^(2)) ~=
проинегрировав получим
t = 0.0181479164692 или ~ 18миллисекунд чтобы развить скорость 2м/с
Дальше мозг опух и пытавшись понять как из V = at проинтегрировав получить путь пройденный за это время понял что использую не те функции, решил погуглить и там решалось это через мощность чтобы соратить все неизвестные переменные
https://physics.stackexchange.com/quest ... given-load
P=T(ω)ω
a=T(ω)ω/mv
T(ω)=T0(1−ω/ω0)
t=∫(1/a )* dv где V e [0, 2 м/с]
t=(m * ω0 * r^2 / T0 ) *ln(ω0 * r / (ω0 * r−V))
Подставил свои значения и получил время t = 0.0181479164692, что равно моему полученному времени, но получено с помощью других физ. величин
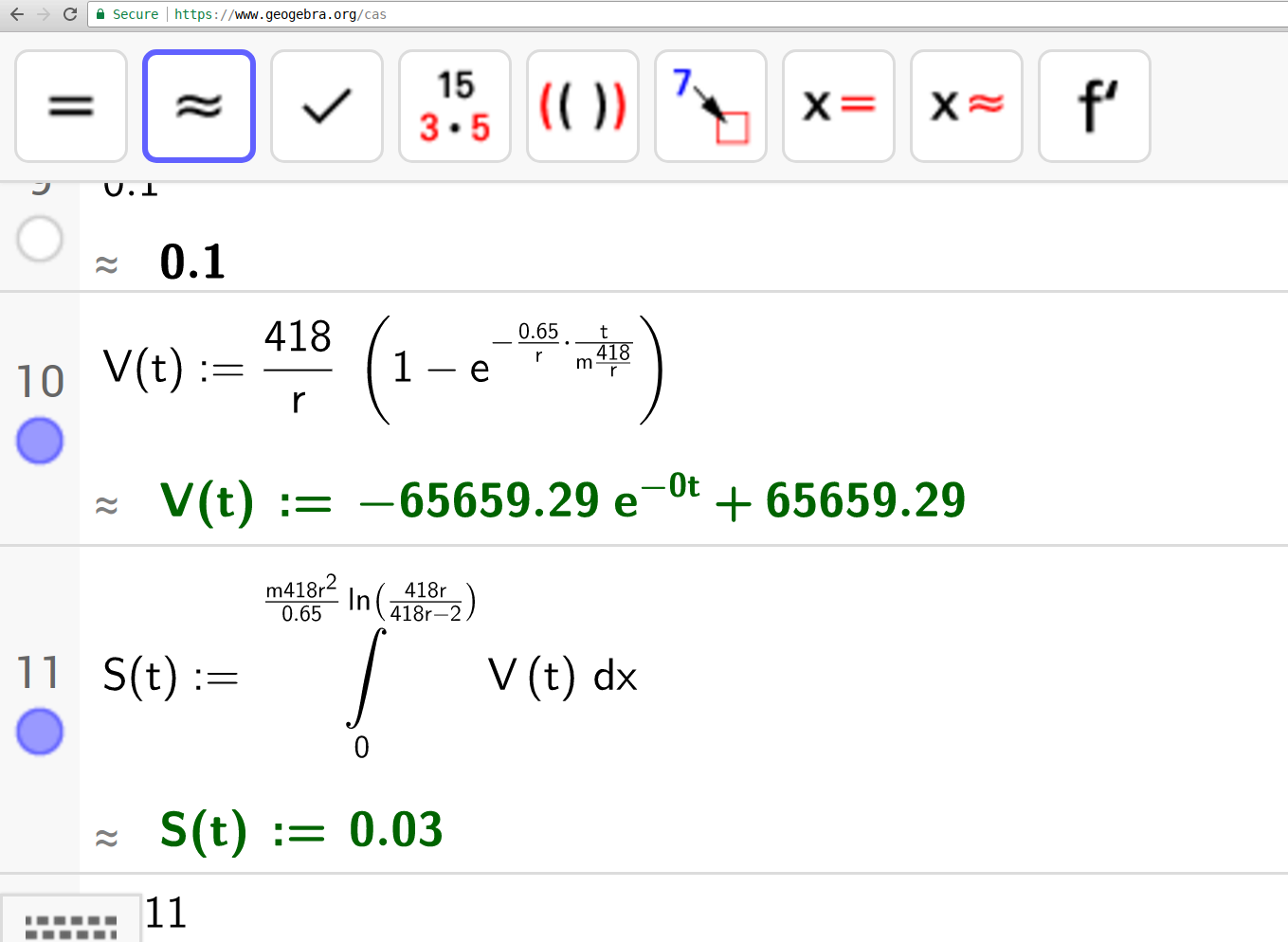
Однако эта формула дает возможность найти V(t) и проинтегрирова ее получить путь S за время ускорения t необходимый чтобы набрать рабочую скорость 2м/c
вообщем после интегрирования скорости с динамически изменяемыми значениями ускорения получился путь S(t) = 0.03 м - т.е. 3 сантиметра проедет каретка с таким мотором прежде чем разовьет 2м/c
Считаем путь который каретка едет на рабочей скорости = 0.17 - 0.03 * 2 = 0.11 = 11 сантиметров
Находим сколько времени потратит каретка чтобы его преодолеть t = S / V = 0.11 / 2 = 0.055
Полное время пути по оси t = 0.055 + 0.0181479164692 = 0.0731479164692 =~ 74миллисекунды
Итого за 1 секунду каретка проедет 1 / 0.0731479164692 = ~13.67092937528937853970 почти 14 раз
Что-то после этих подсчетов хочется пойти поспать