Вот посмотрите как ВЧ часть сделана в этой статье. http://radiokot.ru/circuit/analog/games/11/
Там в первую очередь подавляют частоту суперизации с помощью активного ФНЧ, а потом уже усиливают практически уже чистый сигнал.
А это хотелось бы проверить в передатчике.
Дело в том, что при такой схеме модуляции, что нарисовано у Вас, трудно добиться 100% модуляции, что требуется в данном случае, т.е. может получиться, что на вход "МК" подается ноль, а передатчик все равно излучает, что в данном случае не нужно.
я такто в передатчике коротил на 0 и на 1. Вроде нормально. а как подключаю антенну, излучение с расстоянием исчезает. Ну антенну не могу нормально согласовать чтоли..., пробовал как советовали на форуме наподобие наматыванием на коаксильный кабель несколько витков провода, потом откусываешь скока надо, тож не понравилось. По поводу емкости в приемнике-туда ставил 4,7мкФ, 1мкФ, но почемуто остановился на 0,022мкФ)) Резистор кстаи поставил, в схеме походу не изменил. а кондеры с неправильной полярностью...чето изменения не наблюдал, когда менял))) но раз правильно дык, правильно ставить. поменяю)
Alpout писал(а):я такто в передатчике коротил на 0 и на 1. Вроде нормально.
Что значит вроде?
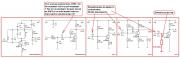
В принципе Вы даже осциллографом можете посмотреть. Это у меня осциллограф низкочастотный.
Ноль подаете, то на выходе передатчика тоже должен быть ноль.
Когда подаете единицу, у меня примерно на таком же передатчике с выходным транзистором КТ3117 на выходе появляется напряжение порядка 7 вольт.
Да Вам можно и не собирать а посмотреть осциллографом через внешний делитель 1:10
У Вас же осциллограф позволяет увидеть данную частоту.
Можно прямо импульсы смотреть. Они на выходе передатчика должны быть от нуля до нескольких вольт.
Lazy писал(а):А вообще, если хотите большую дальность, то от сверхрегенераторов нужно уходить и не связываться с ними даже и на 400 мгц и делать хотя и простенький, но супергетеродин. Это не намного сложнее, чем мучиться со сверхрегенератором.
меня устраивает дальность связи до 300м. тут устройство у меня в режиме онлайн и постоянно пульт тоскаю. данное устройство делаю на кран балку. тоесть нажимаешь кнопку и не отпуская тащишь балку до нужного места. не нужно чтоб прерывался из-за связи. суть такова.
С балкой Вы конечно переборщили. Не боитесь, что он там все свернет? Все таки помехоустойчивость данных устройств очень низкая. Я бы для крана такого не стал делать.
На выходе передатчика если смотреть осциллографом должно быть так.
Alpout писал(а): антенну не могу нормально согласовать чтоли
Вместо L4 в передатчике поставьте нормальную катушку (на каркасе, диаметром 5мм, намотайте 20 витков провода ПЭВ 0.15-0.2мм. Сердечник СЦР), антенна может быть длиной 0.5-1м. Смотрите поле каким-нибудь индикатором (катушкой на щупе осцилла) на расстоянии 0.2-1.5м от антенны. Крутите подстроечник - увидите сами.
В начале жизнь мучает вопросами, в конце - ответами...
во-во я добивался к первой картинке. только подключал напрямую в точку соединения антенна с кондером. только немного верхняя полуволна выше была. кран-балка внутри цеха. цех бетонный, там и делал данное устройство и экспериментировал.
Alpout писал(а):меня устраивает дальность связи до 300м
На 300 метров нужно делать супергетеродин.
Сверхрегенератор на такую дальность не подойдет, тем более, что для таких задач, как управление краном.
Или передатчик делать намного мощнее, да и то вряд ли что то путное выйдет.
Lazy писал(а):На 300 метров нужно делать супергетеродин.
Сверхрегенератор на такую дальность не подойдет.
Или передатчик делать намного мощнее, да и то вряд ли что то путное выйдет.
хм..радиолюбители же делают на большие расстояния. неужели так плох сверхрегенератор.
Эээ…
Дык, для СУРЬЁЗНЫХ дел, использовать ЛЮБИТЕЛЬСКИЕ технологии, не гоже. Должно быть всё сертифицировано. Это ж не игрушки.
Не дай Бог, что-то не сработает, и … Статья корячится....
Пардон, за ворчание старого кота. Не удержался...
Пацаны, не бойтесь меня – ни чему ХОРОШЕМУ я Вас не научу!
svic писал(а):Более-менее хороший результат можно получить при узкополосной ЧМ и тональной кодировке. Ещё лучше применить кодеки ДТМФ от телефонов. Помехоустойчивость неплохая, писать программки не нужно.
Недавно решил провеси эксперемент. На рынке микросхем приемников ДТМФ от телефонов не нашел (видать сняты с производства).
Короче использовал программу на компе, которая выводит на экран цифры при поступлении на вход компа (на вход звуковой карты) двухтонального кода ДТМФ. Запустил на компе Х-Lite - тональный номеронабиратель.
-Выход компа (выход звуковой карты) подключил к передатчику радиостанции с узкополосной ЧМ (25 МГц, девиация +/- 7 кГц).
-Вход компа подключил к выходу приемника ЧМ (25 МГц, девиация +/- 7 кГц).
Короче пропустил ДТМФ код по радиоканалу.
Ну что сказать... собственно как и ожидалось - эта технология (ДТМФ кодирование) плохо подходит для систем радиоуправления.
1- требуеться точно выставлять уровень сигнала на выходе приемника (или входе компа).
Но это еще пол беды (с этим можно справиться)
2- при слабом сигнале, (сигнал зашумлен) как и ожидалось происходит ложное срабатывание. Т.е. всплески шума приемник ДТМФ воспринимает как частоты ДТМФ кода... На экране компа посыпались случайные цифры... - ложные срабатывания.. Вывод: систему построенную по принципу ДТМФ кодирования в радиоуправлении использовать нельзя.
Может я что-то не так сделал... поправьте меня Еще предложения есть ?
roman.com писал(а):требуеться точно выставлять уровень сигнала на выходе приемника (или входе компа)
Это, скорее всего, недостаток софтового характера из-за узости динамического диапазона
Доступные в продаже коммерческие приёмники DTMF принимают сигнал в диапазоне от +1 дБм до -31 дБм. Это соответствует амплитуде сигнала от 1.230В до 30.8 мВ.
В аналоговых радиотелефонах ДТМФ работает и в присутствии шумов.
В начале жизнь мучает вопросами, в конце - ответами...
roman.com писал(а):В аналоговых радиотелефонах ДТМФ работает и в присутствии шумов.
Вопрос какого уровня шумы? )) В рации с узкополосной ЧМ ... при отсутствии сигнала... амплитуда шума на выходе обычно больше уровня полезного сигнала.
Вообще тут вопрос в другом: обычно самое опасное для систем радиоуправления - это ложные срабатывания. К примеру в нормальной системе управления при потере сигнала радиоуправляемая модель просто останавливаеться и все. При ложном срабатывании модель может просто сломаться (упасть, разбиться...). Например при движении модели уровень сигнала постоянно меняеться (рельеф местности, замирания - переотражения от рядом стоящих домов... и т.д.). Если просто катать машинку по квартите (или детской площадке) то мощности передатчика достаточно для надежного управления даже при больших помехах или рядом стоящих домов... А что будет при удалении в несколько километров??? При этом уровень сигнала передатчика на входе приемника меньше 1мкВ ... Как избавиться от ложных срабатываний ?
ДТМФ - с этим не справляеться Скажу больше: проведенные иследования показывают что технология ДТМФ работает даже хуже чем простая система на LC-фильтрах или RC-фильтрах... Дело в том, что в ДТМФ одновременно передаються две частоты. Т.е. в модуляторе две частоты смешиваються... и получаеться что на выходе амплитуда каджой из двух частот меньше примерно на 50% от максимально возможной (для передачи неискаженного сигнала приходиться уменьшать коэффициент модуляции: уменьшать уровень сигнала от ДТМФ шифратора).
Для сравнения: я использовал в качестве эсперемента два RC-фильтра работающих на одно реле. (т.е. реле срабатывает при поступлении одновременно двух разных частот). В передатчике стояли два генератора НЧ сигналов (например 200 Гц и 500 Гц) и мультивибратор, который переключал выходы генераторов НЧ с частотой 10...30 Гц. Т.к. передатчик передавал только одну частоту (например 200 Гц или 500 Гц) то модуляция получилась 100% (!). В итоге получилась система по уровню защищенности не хуже чем ДТМФ и при этом работающая при заметно меньшем уровне сигнала (при меньшем соотношении сигнал/шум) ... в итоге дальность заметно возросла
Но самое плохое в ДТМФ:
При хорошем стабильном сигнале ДТМФ работает довольно чётко. А дальше... при уменьшении уровня сигнала (модель удаляеться от передатчика) начинаеться самое интересное: при определенном соотношении сигнал/шум (сигнал размазываеться в шумах) ДТМФ дешифратор уже не может точно отличить частоты... т.е. шум приемника ДТМФ дешифратор начинает воспринимать как различные частоты ДТМФ кода... к примеру шафратор передает команду "вперед" (цифру "1" - две частоты 697 Гц и 1209 Гц), а из-за шумов на выходе приемника дешифратор ДТМФ выдает команду "назад" (дешифратор ДТМФ думает что это цифра "2" т.к. частота 1209 Гц размыта в шумах... и дешифратор ДТМФ думает что это частота 1336 Гц ... или или цифра "3" - 1477 Гц)
Если посмотреть на осциллографе... частота 1209 Гц среди шумов выглядит как 1336 Гц или 1477 Гц...
При более слабом сигнале (сигнал растворяеться в шумах) дешифратор ДТМФ не выдает команды и модель останавливаеться.
Получаеться что у дешифратор ДТМФ есть слабое место - при определенном уровне сигнала (а это бывает часто!) становиться не управляемая!
В итоге... сами понимаете что может случиться с моделью...
Последний раз редактировалось roman.com Чт авг 01, 2013 15:19:07, всего редактировалось 1 раз.
roman.com писал(а):Как избавиться от ложных срабатываний ?
Берем книжки и читаем.
По данному вопросу много написано.
Вот хотя бы статья в журнале.
Кстати вот передо мной лежит макет системы на простой логике построенный по этому принципу на 561 серии.
В шифраторе две микросхемы.
В дешифраторе восемь.
При нажатии на кнопку команда передается непрерывно. Если две подряд принятые команды одинаковы, значит она выполняется.
Если команды разные, значит ошибка и или предыдущая команда не выполняется или включается команда "Стоп"
Это по желанию.
Посылки с частотой 1 кгц. После детектора стоит узкополосный фильтр на эту частоту.
Хотел выложить на форуме, но и схемы рисовать лень, да и не видно, что бы это кому то было нужно. Делал просто для своего интереса.
Ложные срабатывания минимизированы, но конечно не исключаются пропуски команд. В данном случае просто жать на кнопку, пока команда не выполниться.
Количество команд четыре + команда "Ничего не делать" или "Стоп" по желанию. Это когда ни одна кнопка не нажата.
Приемник по схеме прямого преобразования. Думал попробовать SSB супергетеродин с полосой порядка сотен герц на простеньком кварцевом фильтре, но вот уже вторую неделю, что то лень верх надо мной взяла.
На МК конечно можно придумать и более серьезные методы кодирования, но это не интересно, т.к. все уже придумали.
SERJ писал(а):На МК конечно можно придумать и более серьезные методы кодирования, но это не интересно, т.к. все уже придумали...
Это точно . Я тоже делаю для интереса... интересно разобрать все подробно самому! Просто собрать готовую схему мне не интересно...
SERJ писал(а):В шифраторе две микросхемы.В дешифраторе восемь.
Мдя... не маленькая получаеться схема.
Простенькие технологии типа частотного кодирования меня уже чето не удовлетворяют...
Куча деталей... Габариты... (про LC-фильтры я вообще молчу ) Малое число команд... (частотный спектр радиоканала рации ограничен до 3000 Гц)...
Будем переходить на импульсные (цифровые) технологии... Я тут придумал другую простенькую схемку... передача импульсов с временным разделением каналов... полностью (или можно частично) на транзисторах- самый распространенных (и бесплатных) элементах ))) Предварительные результаты уже не плохие. Дособираю, расскажу что получилось.