|
–§–æ—Ä—É–º –Ý–∞–¥–∏–æ–ö–æ—Ç • –ü—Ä–æ—Å–º–æ—Ç—Ä —Ç–µ–º—ã - –ß–∞—Å—Ç–æ—Ç–Ω—ã–π –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å
–°–æ–æ–±—â–µ–Ω–∏—è –±–µ–∑ –æ—Ç–≤–µ—Ç–æ–≤ | –ê–∫—Ç–∏–≤–Ω—ã–µ —Ç–µ–º—ã
 
|
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 636 –∏–∑ 675
|
[ –°–æ–æ–±—â–µ–Ω–∏–π: 13485 ] |
... , , , , , , ... |
| –ê–≤—Ç–æ—Ä |
–°–æ–æ–±—â–µ–Ω–∏–µ |
Yushik

|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß–∞—Å—Ç–æ—Ç–Ω—ã–π –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å  –î–æ–±–∞–≤–ª–µ–Ω–æ: –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç —Ñ–µ–≤ 06, 2024 19:56:30 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –¥–µ–∫ 27, 2022 20:50:57
–°–æ–æ–±—â–µ–Ω–∏–π: 123
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ï–º–∫–æ—Å—Ç—å –∫–æ–Ω–¥–µ–Ω—Å–∞—Ç–æ—Ä–æ–≤ –Ω–∞ —à–∏–Ω–µ DC —É –º–µ–Ω—è –ø—Ä–µ–≤—ã—à–µ–Ω–∞ –Ω–∞ 20 –ø—Ä–æ—Ü–µ–Ω—Ç–æ–≤ –æ—Ç —Ä–µ–∫–æ–º–µ–Ω–¥—É–µ–º–æ–π. –í –ø—Ä–∏–Ω—Ü–∏–ø–µ —è –¥—É–º–∞—é —ç—Ç–∞ –æ—à–∏–±–∫–∞ F02 –ø—Ä–∏ —Å—Ç–∞—Ä—Ç–µ —Å–¥–µ—Å—å –Ω–∏–∫–æ–≥–æ –Ω–µ –Ω–∞–ø—Ä—è–≥–∞–µ—Ç, —è —Ç–æ–ª—å–∫–æ –≤—ã—Å–∫–∞–∑–∞–ª —Å–≤–æ—é –º—ã—Å–ª—å. –ü–æ –≤–Ω–µ—à–Ω–µ–º—É —É–ø—Ä–∞–≤–ª—è—é—â–µ–º—É –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä—É —è –¥—É–º–∞—é –≤–æ–æ–±—â–µ –µ—Å—Ç—å —Å–º—ã—Å–ª –≤–º–µ—Å—Ç–æ –ø–æ—Ç–µ–Ω—Ü–∏–æ–º–µ—Ç—Ä–∞ –ø–æ—Å—Ç–∞–≤–∏—Ç—å —ç–Ω–∫–æ–¥–µ—Ä. –ò –ø—Ä–µ–¥—É—Å–º–æ—Ç—Ä–µ—Ç—å —Ä–∞–∑–Ω—ã–µ —Ä–µ–∂–∏–º—ã —Ä–∞–±–æ—Ç—ã –¥–ª—è —Ç–æ–∫–∞—Ä–Ω—ã—Ö –∏ –¥—Ä—É–≥–∏—Ö —Å—Ç–∞–Ω–∫–æ–≤. –£ –º–µ–Ω—è –ª–∏—á–Ω–æ –æ–ø—Ä–∞—à–∏–≤–∞—Ç—å —ç–Ω–∫–æ–¥–µ—Ä –ø–æ–ª—É—á–∏–ª–æ—Å—å —Ç–æ–ª—å–∫–æ –ø–æ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è–º. –ü–æ–¥ —ç–Ω–∫–æ–¥–µ—Ä –Ω–∞–≤–µ—Ä–Ω–æ–µ –ø—Ä–∏–¥—ë—Ç—Å—è –¥—Ä—É–≥–æ–π –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –±—Ä–∞—Ç—å. –ü–æ—Å–∫–æ–ª—å–∫—É —É PIC16F690 —Ç–æ–ª—å–∫–æ –æ–¥–Ω–∞ –Ω–æ–≥–∞ –≤–Ω–µ—à–Ω–µ–≥–æ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è. –ù–µ –æ–±–µ—â–∞—é —Å–∏–ª—å–Ω–æ, —ç—Ç–æ—Ç –≥–æ–¥ —É –º–µ–Ω—è —Å–∏–ª—å–Ω–æ –Ω–∞–ø—Ä—è–∂—ë–Ω–Ω—ã–π –±—É–¥–µ—Ç –º–æ–∂–µ—Ç —É –º–µ–Ω—è –ø–æ–ª—É—á–∏—Ç—Å—è —Å–≤–æ–π –≤–Ω–µ—à–Ω–∏–π –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä —Å–¥–µ–ª–∞—Ç—å.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
 |
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
DC-AC
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß–∞—Å—Ç–æ—Ç–Ω—ã–π –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç —Ñ–µ–≤ 06, 2024 20:11:19 |
|
| –°–æ–±—É—Ç—ã–ª—å–Ω–∏–∫ –ö–æ—Ç–∞ |
–ö–∞—Ä–º–∞: 48
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 895
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –∏—é–Ω 26, 2014 00:04:37
–°–æ–æ–±—â–µ–Ω–∏–π: 2973
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
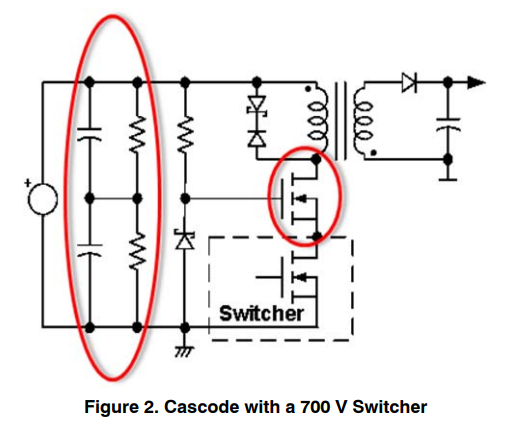
–î–∞ —ç—Ç–æ –º–µ–ª–æ—á—å –≤—Å—ë, —Å F02, –µ—â—ë –∑–∞–≤–∏—Å–∏—Ç –æ—Ç –≤—Ä–µ–º–µ–Ω–∏ —Å—Ç–∞—Ä—Ç–∞ –ë–ü –∏ –æ—Ç –µ–≥–æ –ø–æ–¥–∫–ª—é—á–µ–Ω–∏—è. –Ø –ø–æ–∫–∞ –ë—É–ª—å–¥—é–∫–æ–º —à–µ—Å—Ç–∏—Å–æ—Ç—ã–º –±—É–¥—É –∑–∞–Ω–∏–º–∞—Ç—å—Å—è. –ö–∞–∫ —Ä–∞–∑ –≤–æ—Ç –∏–Ω—Ç–µ—Ä–µ—Å–Ω–∞—è —Å–∏—Ç—É–∞—Ü–∏—è —Å –ë–ü 24–í. –ü–æ —Ç–æ–π —Å—Ö–µ–º–µ –≤—ã—à–µ, –µ—Å–ª–∏ –∑–∞–ø–∏—Ç–∞–Ω –æ—Ç —Å–µ—Ç–∏ 220, –æ–Ω –æ–∫–∞–∑—ã–≤–∞–µ—Ç—Å—è –ø–æ–¥ —Å–ª–æ–∂–Ω—ã–º –®–ò–ú-–¥—Ä–æ—Å—Å–µ–ª—å–Ω–Ω—ã–º —Å–∏–≥–Ω–∞–ª–æ–º –º–µ–∂–¥—É –≤—Ö–æ–¥–æ–º –∏ –≤—ã—Ö–æ–¥–æ–º. –≠—Ç–æ –ø–ª–æ—Ö–æ. –ë–ü –¥–æ–ª–∂–µ–Ω —Å–∏–¥–µ—Ç—å –Ω–∞ –∏–Ω–≤–µ—Ä—Ç–æ—Ä–µ, –∞ –∑–Ω–∞—á–∏—Ç –Ω–∞–¥–æ –±—É–¥–µ—Ç –ø–µ—Ä–µ–¥–µ–ª–∞—Ç—å, —á—Ç–æ–± —Ä–∞–±–æ—Ç–∞–ª –æ—Ç –ø–æ—Å—Ç–æ—è–Ω–∫–∏ DC-—à–∏–Ω—ã 600–í (–¥–æ ~800–í). –ü–æ–ª–µ–≤–∏–∫ –Ω–∞ 1500–í, —Ö–æ—Ä–æ—à–æ –æ–Ω–∏ –µ—Å—Ç—å. –û–Ω –∏ –¥–ª—è —à—Ç–∞—Ç–Ω–æ–≥–æ HD600 —Ö–æ—Ä–æ—à–æ –∑–∞–π–¥—ë—Ç.
_________________
–û–±–Ω–æ–≤–ª–µ–Ω–∏—è, –¥–æ–∫—É–º–µ–Ω—Ç–∞—Ü–∏—è, —Å—Ö–µ–º—ã –∏ –ø—Ä–æ—à–∏–≤–∫–∏ –í–æ—Å—å–º–∏–∫—Ä—É—Ç–∞ - yandex
–û–±–Ω–æ–≤–ª–µ–Ω–∏—è, –¥–æ–∫—É–º–µ–Ω—Ç–∞—Ü–∏—è, —Å—Ö–µ–º—ã –∏ –ø—Ä–æ—à–∏–≤–∫–∏ –í–æ—Å—å–º–∏–∫—Ä—É—Ç–∞ - google
–í–∏–¥–µ–æ —Ä–æ–ª–∏–∫–∏ YouTube RuTube –î–∑–µ–Ω
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
–ù–ï–ú–ï–¢–°
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß–∞—Å—Ç–æ—Ç–Ω—ã–π –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç —Ñ–µ–≤ 06, 2024 22:53:15 |
|
| –í—ã–º–æ–≥–∞—Ç–µ–ª—å –ø—Ä–∏–ø–æ—è |
 |
–ö–∞—Ä–º–∞: 3
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 338
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –º–∞—Ä 31, 2016 13:47:04
–°–æ–æ–±—â–µ–Ω–∏–π: 655
–û—Ç–∫—É–¥–∞: –°–∞–º–∞—Ä–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–ï–º–∫–æ—Å—Ç—å –∫–æ–Ω–¥–µ–Ω—Å–∞—Ç–æ—Ä–æ–≤ –Ω–∞ —à–∏–Ω–µ DC —É –º–µ–Ω—è –ø—Ä–µ–≤—ã—à–µ–Ω–∞ –Ω–∞ 20 –ø—Ä–æ—Ü–µ–Ω—Ç–æ–≤ –æ—Ç —Ä–µ–∫–æ–º–µ–Ω–¥—É–µ–º–æ–π. –í –ø—Ä–∏–Ω—Ü–∏–ø–µ —è –¥—É–º–∞—é —ç—Ç–∞ –æ—à–∏–±–∫–∞ F02 –ø—Ä–∏ —Å—Ç–∞—Ä—Ç–µ —Å–¥–µ—Å—å –Ω–∏–∫–æ–≥–æ –Ω–µ –Ω–∞–ø—Ä—è–≥–∞–µ—Ç, —è —Ç–æ–ª—å–∫–æ –≤—ã—Å–∫–∞–∑–∞–ª —Å–≤–æ—é –º—ã—Å–ª—å. –£–≤–µ–ª–∏—á—å—Ç–µ "–∑–∞—Ä—è–¥–Ω—É—é" –µ–º–∫–æ—Å—Ç—å –∏ –±—É–¥–µ—Ç –≤–∞–º —Å—á–∞—Å—Ç—å–µ. "–ù–µ —Å–ª–µ–¥—É–µ—Ç –º–Ω–æ–∂–∏—Ç—å —Å—É—â–µ–µ –±–µ–∑ –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ—Å—Ç–∏".–≤–º–µ—Å—Ç–æ –ø–æ—Ç–µ–Ω—Ü–∏–æ–º–µ—Ç—Ä–∞ –ø–æ—Å—Ç–∞–≤–∏—Ç—å —ç–Ω–∫–æ–¥–µ—Ä. –ü—Ä–∞–≤–∏–ª—å–Ω–æ - —Ä–µ–∑–∏—Å—Ç–æ—Ä–æ–º —á–∞—Å—Ç–æ—Ç—É —Å —Ç–æ—á–Ω–æ—Å—Ç—å—é –¥–æ 0.1–ì—Ü –Ω–µ —É—Å—Ç–∞–Ω–æ–≤–∏—Ç—å. –£ –º–µ–Ω—è –ª–∏—á–Ω–æ –æ–ø—Ä–∞—à–∏–≤–∞—Ç—å —ç–Ω–∫–æ–¥–µ—Ä –ø–æ–ª—É—á–∏–ª–æ—Å—å —Ç–æ–ª—å–∫–æ –ø–æ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è–º. –í—Å–µ –∑–∞–≤–∏—Å–∏—Ç –æ—Ç –∫–∞—á–µ—Å—Ç–≤–∞ / –∑–∞—á–º—ã–∑–≥–∞–Ω–Ω–æ—Å—Ç–∏ –∫–æ–Ω—Ç–∞–∫—Ç–æ–≤ —ç–Ω–∫–æ–¥–µ—Ä–∞, –º–æ–∂–Ω–æ –∏ —Å –æ–¥–Ω–∏–º –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–µ–º, –∞ –º–æ–∂–Ω–æ –∏ –≤–æ–æ–±—â–µ –±–µ–∑ –Ω–∏—Ö. —É PIC16F690 —Ç–æ–ª—å–∫–æ –æ–¥–Ω–∞ –Ω–æ–≥–∞ –≤–Ω–µ—à–Ω–µ–≥–æ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è. –ü—Ä–∏ —á–µ–º –∑–¥–µ—Å—å PIC16F690? –Ý—è–¥–æ–º —Å –ö561–ö–¢3 –≤ —Å—Ç–æ–ª–µ –∑–∞–≤–∞–ª—è–ª—Å—è?  –ù–µ –æ–±–µ—â–∞—é —Å–∏–ª—å–Ω–æ –° —á–µ–≥–æ –≤—ã —Ä–µ—à–∏–ª–∏, —á—Ç–æ –∑–¥–µ—Å—å –∂–¥—É—Ç –ø—Ä–∏—Ö–æ–¥–∞ –º–µ—Å—Å–∏–∏? –í –∞–ø—Ä–µ–ª–µ –±—ã–ª –±—ã –≥–æ–¥, –∫–∞–∫ –≤—ã–ª–æ–∂–µ–Ω—ã –∏—Å—Ö–æ–¥–Ω–∏–∫–∏ (—Å—Ç—Ä. 620) —É–ø—Ä–∞–≤–ª—è—é—â–µ–≥–æ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞ "–¥–ª—è –∞—Ä–¥—É–∏–Ω—ã —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º". –°–ø–æ–π–ª–µ—Ä–¢–∞–º –±—ã–ª–∞ "–ø–∞—Å—Ö–∞–ª–∫–∞" (–æ–¥–Ω–∞ —Å—Ç—Ä–æ—á–∫–∞ –∑–∞–∫–æ–º–º–µ–Ω—Ç–∏—Ä–æ–≤–∞–Ω–∞) –Ω–∞ —Å–ª—É—á–∞–π "—á–æ—Ç —è –ø—Ä–æ—à–∏–ª, –∞ –æ–Ω–æ –Ω–µ —Ä–∞–±–æ—Ç–∞–µ—Ç". –ü–æ–ª—É—á–∏–ª–æ—Å—å –Ω–µ–Ω–∞—Ä–æ–∫–æ–º, –¥–ª—è –∏–Ω—Ç–µ—Ä–µ—Å–∞ –æ—Å—Ç–∞–≤–∏–ª, –∫–∞–∫ –µ—Å—Ç—å, –Ω–æ –Ω–∏ –æ–¥–Ω–æ–≥–æ –≤–æ–ø—Ä–æ—Å–∞ –∑–∞ –≤—Å–µ –≤—Ä–µ–º—è –Ω–µ –ø–æ–ª—É—á–∏–ª. –•–æ—Ç—è, –∫–∞–∫ –º–∏–Ω–∏–º—É–º, –æ—Ç –æ–¥–Ω–æ–≥–æ —É—á–∞—Å—Ç–Ω–∏–∫–∞ –¥–∞–Ω–Ω–æ–≥–æ —Ñ–æ—Ä—É–º–∞ —ç—Ç–æ—Ç –≤–æ–ø—Ä–æ—Å –æ–∂–∏–¥–∞–ª—Å—è. –û—Ç —Ç–∞–∫ –æ—Ç...–ü–æ–ª–µ–≤–∏–∫ –Ω–∞ 1500–í, —Ö–æ—Ä–æ—à–æ –æ–Ω–∏ –µ—Å—Ç—å. –î–∏–º, –æ–Ω–∏ —Å—Ç–æ—è—Ç –∫–∞–∫ —Å–∞–º–æ–ª–µ—Ç... –ê –µ—Å–ª–∏ —Ç–∞–∫? 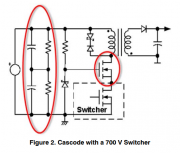
_________________
HEMETC–∫–∏–π –∞—Ä—Ö–∏–≤: H8K –Ω–∞ yandex-–¥–∏—Å–∫–µ = H8K –Ω–∞ google-–¥–∏—Å–∫–µ
–ü–æ–∫–∞–∑–æ–º–µ—Ç—Ä—ã –Ω–∞ Arduino –∏ –¥—Ä—É–≥–∏–µ –í–æ—Å—å–º–∏–∫—Ä—É—Ç—ã (—Å—Ö–µ–º—ã, –ø–ª–∞—Ç—ã, –ø—Ä–æ—à–∏–≤–∫–∏, —Ñ–æ—Ç–æ)
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Yushik
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß–∞—Å—Ç–æ—Ç–Ω—ã–π –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä —Ñ–µ–≤ 07, 2024 09:01:01 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –¥–µ–∫ 27, 2022 20:50:57
–°–æ–æ–±—â–µ–Ω–∏–π: 123
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ù–ï–ú–ï–¢–° –ø—Ä–∏–≤–µ—Ç—Å—Ç–≤—É—é, —è –≤–∏–¥–µ–ª —á—Ç–æ –Ω–∞ —Ñ–æ—Ä—É–º–µ –µ—Å—Ç—å –≤–Ω–µ—à–Ω–∏–π —É–ø—Ä–∞–≤–ª—è—é—â–∏–π –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º. –ù–æ –ø–æ–¥ —É–¥–æ–±—Å—Ç–≤–æ –ø–æ–ª—å–∑–æ–≤–∞–Ω–∏—è —Ç–æ–∫–∞—Ä–Ω–æ–≥–æ —Å—Ç–∞–Ω–∫–∞, –º–Ω–µ –ª–∏—á–Ω–æ –æ–Ω –Ω–µ –ø–æ–¥—Ö–æ–¥–∏—Ç.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
Alex_BB
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß–∞—Å—Ç–æ—Ç–Ω—ã–π –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä —Ñ–µ–≤ 07, 2024 14:24:00 |
|
| –ì—Ä—ã–∑–µ—Ç –∫–∞–Ω–∏—Ñ–æ–ª—å |
 |
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –º–∞—Ä 14, 2021 12:45:39
–°–æ–æ–±—â–µ–Ω–∏–π: 266
–û—Ç–∫—É–¥–∞: –ö—Ä–∞—Å–Ω–æ–¥–∞—Ä
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–î–∏–º, –æ–Ω–∏ —Å—Ç–æ—è—Ç –∫–∞–∫ —Å–∞–º–æ–ª–µ—Ç... —Ä–∞–∑–≤–µ —ç—Ç–æ –¥–æ—Ä–æ–≥–æ?  –î–æ–±–∞–≤–ª–µ–Ω–æ after 2 minutes 23 seconds: –î–æ–±–∞–≤–ª–µ–Ω–æ after 2 minutes 23 seconds:–ë—É–ª—å–¥—é–∫ –¥–ª—è –∫–ª–∞—Å—Å–∏–∫–∏ –µ—Å—Ç—å. –ê –ø–æ—á–µ–º—É-–±—ã –Ω–µ —Å–¥–µ–ª–∞—Ç—å –¥–ª—è HD600, —Ç–æ–ª—å–∫–æ –¥—Ä—É–≥–æ–π. –ù–æ–≥–∞–º–∏ –∏ —Ä—É–∫–∞–º–∏ —Ç–æ–ª—å–∫–æ –∑–∞! 
_________________
–í –ª—é–±–æ–º –∏–∑ –Ω–∞—Å —Å–ø–∏—Ç –≥–µ–Ω–∏–π. –ò —Å –∫–∞–∂–¥—ã–º –¥–Ω–µ–º –≤—Å–µ –∫—Ä–µ–ø—á–µ.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
–ù–ï–ú–ï–¢–°
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß–∞—Å—Ç–æ—Ç–Ω—ã–π –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä —Ñ–µ–≤ 07, 2024 17:40:09 |
|
| –í—ã–º–æ–≥–∞—Ç–µ–ª—å –ø—Ä–∏–ø–æ—è |
|
–ö–∞—Ä–º–∞: 3
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 338
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –º–∞—Ä 31, 2016 13:47:04
–°–æ–æ–±—â–µ–Ω–∏–π: 655
–û—Ç–∫—É–¥–∞: –°–∞–º–∞—Ä–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
—Ä–∞–∑–≤–µ —ç—Ç–æ –¥–æ—Ä–æ–≥–æ? —Ä–∞–∑–≤–µ —ç—Ç–æ —á–µ—Å—Ç–Ω—ã–µ 1500–í? 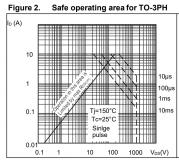 "–ª–∏–∑–∏–Ω–≥ –º–∞—Ä–∫–µ—Ç–∏–Ω–≥ —É–Ω–¥ –Ω–∞–∫–ª–µ–∏–Ω–≥ –Ω–∞ –∫–æ–Ω–≤–µ—Ä—Ç–∏–Ω–≥"
_________________
HEMETC–∫–∏–π –∞—Ä—Ö–∏–≤: H8K –Ω–∞ yandex-–¥–∏—Å–∫–µ = H8K –Ω–∞ google-–¥–∏—Å–∫–µ
–ü–æ–∫–∞–∑–æ–º–µ—Ç—Ä—ã –Ω–∞ Arduino –∏ –¥—Ä—É–≥–∏–µ –í–æ—Å—å–º–∏–∫—Ä—É—Ç—ã (—Å—Ö–µ–º—ã, –ø–ª–∞—Ç—ã, –ø—Ä–æ—à–∏–≤–∫–∏, —Ñ–æ—Ç–æ)
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
DC-AC
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß–∞—Å—Ç–æ—Ç–Ω—ã–π –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä —Ñ–µ–≤ 07, 2024 20:45:37 |
|
| –°–æ–±—É—Ç—ã–ª—å–Ω–∏–∫ –ö–æ—Ç–∞ |
–ö–∞—Ä–º–∞: 48
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 895
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –∏—é–Ω 26, 2014 00:04:37
–°–æ–æ–±—â–µ–Ω–∏–π: 2973
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
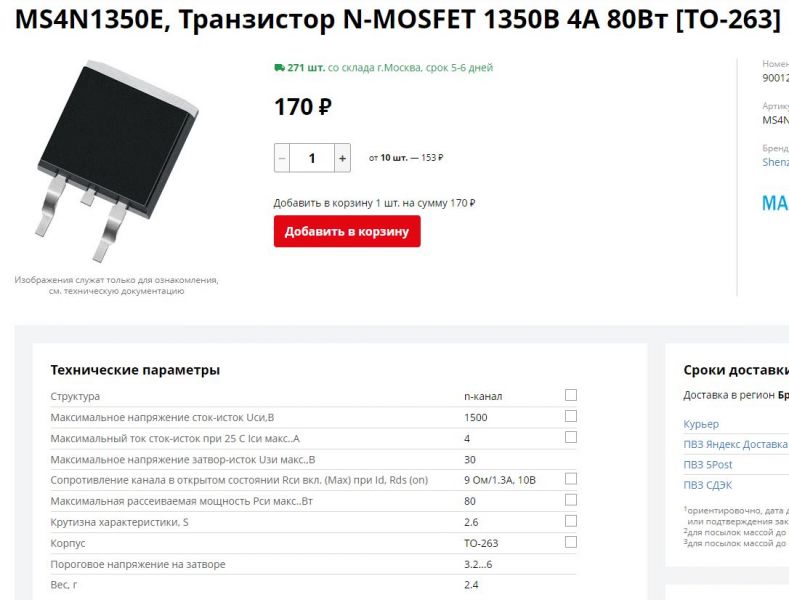
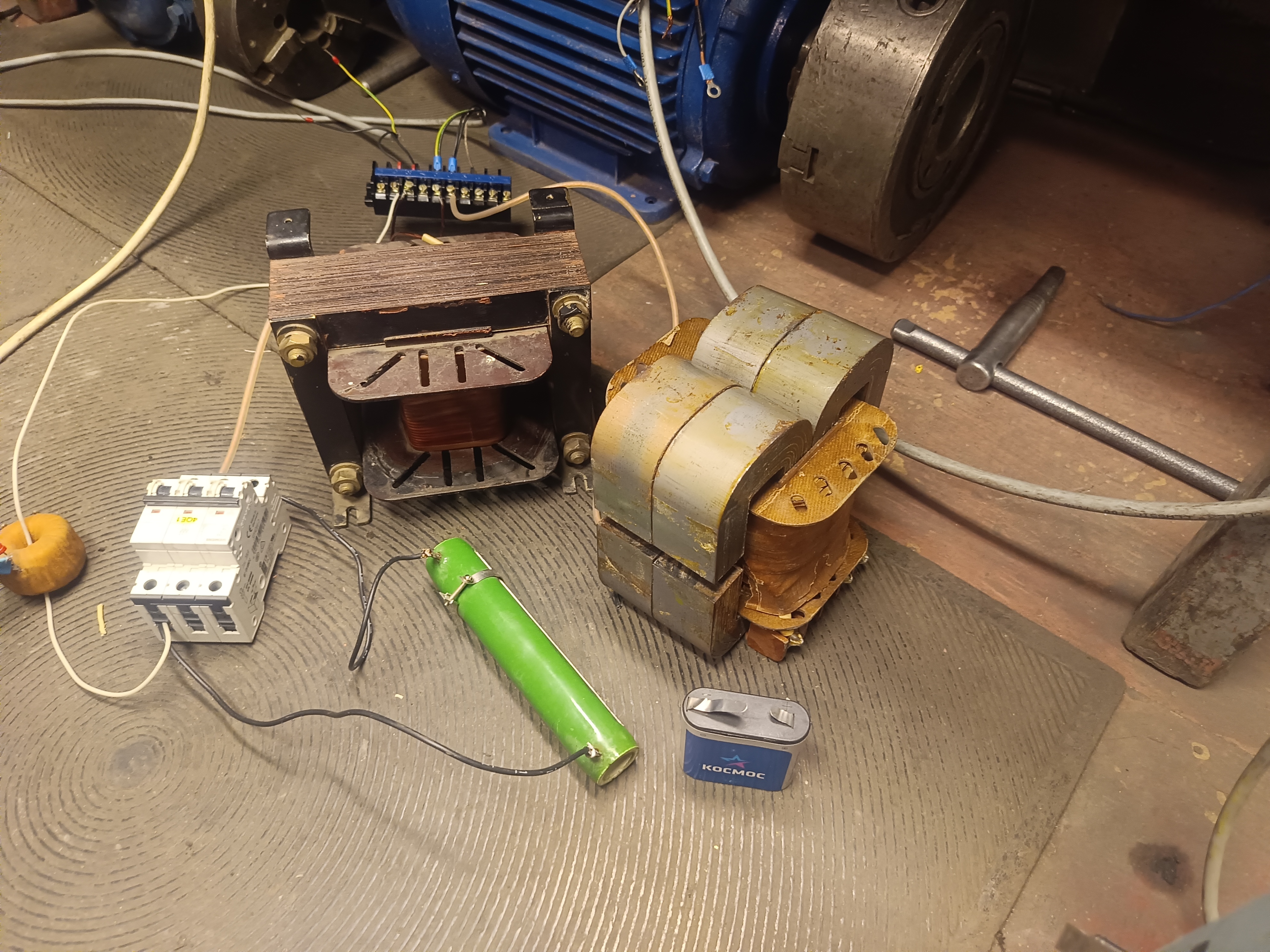
Alex_BB –ø–∏—Å–∞–ª(–∞): –ù–æ–≥–∞–º–∏ –∏ —Ä—É–∫–∞–º–∏ —Ç–æ–ª—å–∫–æ –∑–∞! –ë–ª–∞–≥–æ–¥–∞—Ä—é, –±—É–¥–µ—Ç –±–æ–ª—å—à–µ –º–æ—Ç–∏–≤–∞—Ü–∏–∏ –∫ –¥–µ–π—Å—Ç–≤–∏—é. –°–µ–≥–æ–¥–Ω—è –¥–ª—è —Å—Ç–µ–Ω–¥–∞ –æ—Ç–ª–∞–¥–∫–∏ –ø–µ—Ä–µ–¥–µ–ª–∞–ª –∫–∞–∫–æ–π-—Ç–æ –∑–∞–≤–æ–¥—Å–∫–æ–π –ë–ü —Ç–∏–ø–∞ "—Ñ–∞—Ä–∞–¥–µ–π" –ø–æ–¥ —à–∏–Ω—É 600–í, –ë–ü –æ–±—Ä–∞—Ç–Ω–æ—Ö–æ–¥, –Ω–∞ –∫–∞–∫–æ–π-—Ç–æ –º–µ–ª–∫–æ–π 6 –Ω–æ–≥–æ–π —à–∏–º–∫–µ. –ü–æ–ª–µ–≤–∏–∫ –≤–æ—Ç–∫–Ω—É–ª K2225, —ç—Ç–æ –∏–∑ —Ñ–∏—Ä–º–æ–≤–æ–≥–æ —á–∞—Å—Ç–æ—Ç–Ω–∏–∫–∞, –∑–∞–º–µ–Ω–∏–ª –≤—Å–µ –¥–∏–æ–¥—ã –Ω–∞ –±–æ–ª–µ–µ –≤—ã—Å–æ–∫–æ–≤–æ–ª—å—Ç–Ω—ã–µ –∏ —ç–ª–µ–∫—Ç—Ä–æ–ª–∏—Ç—ã –¥–≤–∞ –º–µ–ª–∫–∏—Ö —Å –ª–∞–º–ø –ø–æ—Å–ª–µ–¥–æ–≤–∞—Ç–µ–ª—å–Ω–æ, —Ç—Ä–∞–Ω—Å –Ω–µ —Ç—Ä–æ–≥–∞–ª, –ë–ü —Ä–∞–±–æ—Ç–∞–µ—Ç. –ï—â—ë –Ω–∞—à–µ–ª –ø–æ–¥–æ–±–Ω—ã–π –ø–æ–ª–µ–≤–∏–∫ K1413, —Ç–∞–∫–∂–µ –±–æ–ª—å—à–æ–π –ø–ª–∞—Å—Ç–∏–∫–æ–≤—ã–π –∫–æ—Ä–ø—É—Å, –Ω–∞ –∞–ª–∏ –≤—Ä–æ–¥–µ –¥–µ—à–µ–≤–æ –º–æ–∂–Ω–æ —Ç–∞–∫–∏–µ –≤–∑—è—Ç—å, –Ω–æ –Ω—É–∂–Ω–æ –±—É–¥–µ—Ç –∏—Ö –ø—Ä–æ–≤–µ—Ä—è—Ç—å. –ê —Ç–∞–∫ –ø–æ–¥–æ–±–Ω—ã–µ –≤—ã—Å–æ–∫–æ–≤–æ–ª—å—Ç–Ω–∏–∫–∏ –æ–Ω–∏ –≤—Å–µ –ø–æ—Ö–æ–∂–∏ –∏ —Å –±–æ–ª—å—à–∏–º —Å–æ–ø—Ä–æ—Ç–∏–≤–ª–µ–Ω–∏–µ–º –∫–∞–Ω–∞–ª–∞, 4N1350 —Å–∫–æ—Ä–µ–µ —Ç–æ–∂–µ –±—É–¥–µ—Ç —Ä–∞–±–æ—Ç–∞—Ç—å, –∑–∞—Ç–≤–æ—Ä —á—É—Ç—å –ø–æ—Ç—è–∂–µ–ª–µ–µ. –ú–æ—â–Ω–æ—Å—Ç—å —Ç–æ –±–æ–ª—å—à–∞—è –Ω–µ –Ω—É–∂–Ω–∞ –Ω–∞ –ø–ª–∞—Ç—É —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è. –°–∏–ª–æ–≤—ã–µ –æ–ø—ã—Ç–Ω—ã–µ –¥—Ä–æ—Å—Å–µ–ª–∏, –æ–¥–∏–Ω ~2–º–ì–Ω –æ—Ç –∫–ª–∞—Å—Å–∏—á–µ—Å–∫–æ–≥–æ –ë—É–ª—å–¥—é–∫–∞, –≤—Ç–æ—Ä–æ–π ~10–º–ì–Ω - –∫–∏–ª–æ–≤–∞—Ç—Ç–Ω—ã–π —Ç—Ä–∞–Ω—Å—Ñ–æ—Ä–º–∞—Ç–æ—Ä —Å –ø–µ—Ä–≤–∏—á–∫–æ–π –Ω–∞ 220–í, —Å–µ—á–µ–Ω–∏–µ –º–µ–¥–∏ ~2,8 –∫–≤–∞–¥—Ä–∞—Ç–∞. –ü–æ–∫–∞ –Ω–µ –ø–µ—Ä–µ–º–∞—Ç—ã–≤–∞–ª, –ø—Ä–æ—Å—Ç–æ —Ä–∞–∑–æ–±—Ä–∞–ª –∏ —Å–¥–µ–ª–∞–ª –±–æ–ª—å—à–æ–π –∑–∞–∑–æ—Ä. –ü–µ—Ä–≤–∏—á–∫–∞ –∫–∞–∫ —Å–∏–ª–æ–≤–∞—è –æ–±–º–æ—Ç–∫–∞ –¥—Ä–æ—Å—Å–µ–ª—è. –ò–Ω–¥—É–∫—Ç–∏–≤–Ω–æ—Å—Ç–∏ –≤—ã—á–∏—Å–ª—è–ª–∏—Å—å –ø–æ –ø–∞–¥–µ–Ω–∏—é –Ω–∞ –¥—Ä–æ—Å—Å–µ–ª–µ, –≤–∫–ª—é—á–µ–Ω–Ω–æ–º –≤ —Å–µ—Ç—å —á–µ—Ä–µ–∑ –∞–∫—Ç–∏–≤–Ω—É—é –Ω–∞–≥—Ä—É–∑–∫—É (—á–∞–π–Ω–∏–∫), –∫–∞–∫ –º—ã —É–∂–µ —É–º–µ–µ–º –¥–ª—è –∫–ª–∞—Å—Å–∏—á–µ—Å–∫–æ–≥–æ –ë—É–ª—å–¥—é–∫–∞. –î–∞–ª—å—à–µ –æ–ø—Ä–æ–±–æ–≤–∞–Ω–∏–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è —ç—Ç–æ–π —Å–∏—Å—Ç–µ–º–æ–π –Ω–∞ –±–∞–∑–µ –ø–ª–∞—Ç—ã –í–æ—Å—å–º–∏–∫—Ä—É—Ç–∞ HD600 –∏ —è–¥—Ä–∞ –µ–≥–æ –ø—Ä–æ—à–∏–≤–∫–∏ –®–ò–ú –º–æ–¥—É–ª—è—Ç–æ—Ä–∞. 
_________________
–û–±–Ω–æ–≤–ª–µ–Ω–∏—è, –¥–æ–∫—É–º–µ–Ω—Ç–∞—Ü–∏—è, —Å—Ö–µ–º—ã –∏ –ø—Ä–æ—à–∏–≤–∫–∏ –í–æ—Å—å–º–∏–∫—Ä—É—Ç–∞ - yandex
–û–±–Ω–æ–≤–ª–µ–Ω–∏—è, –¥–æ–∫—É–º–µ–Ω—Ç–∞—Ü–∏—è, —Å—Ö–µ–º—ã –∏ –ø—Ä–æ—à–∏–≤–∫–∏ –í–æ—Å—å–º–∏–∫—Ä—É—Ç–∞ - google
–í–∏–¥–µ–æ —Ä–æ–ª–∏–∫–∏ YouTube RuTube –î–∑–µ–Ω
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Yushik
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß–∞—Å—Ç–æ—Ç–Ω—ã–π –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä —Ñ–µ–≤ 07, 2024 22:03:01 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –¥–µ–∫ 27, 2022 20:50:57
–°–æ–æ–±—â–µ–Ω–∏–π: 123
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–¢–≤–æ—Ä—á–µ—Å–∫–∏—Ö —É—Å–ø–µ—Ö–æ–≤ –≤–∞–º –≤ –ø–æ—Å—Ç—Ä–æ–π–∫–µ —ç—Ç–æ–≥–æ –±—É–ª—å–¥–æ–≥–∞. –ò–Ω—Ç–µ—Ä–µ—Å–Ω–æ –±—É–¥–µ—Ç —É–≤–∏–¥–µ—Ç—å –µ–≥–æ –≤ —Ä–∞–±–æ—Ç–µ, –∞ –≤–¥—Ä—É–≥ –æ–Ω –î–Ω–µ–ø—Ä–æ–ì–≠–° –ø–æ –≥–µ–Ω–µ—Ä–∞—Ü–∏–∏ –¥–æ–≥–æ–Ω–∏—Ç. –í–æ–ø—Ä–æ—Å —Ç–∞–∫–æ–π –Ω–∞ –∫–∞–∫–æ–π —Å—Ç—Ä–∞–Ω–∏—Ü–µ –µ—Å—Ç—å –¥–æ–∫—É–º–µ–Ω—Ç–∞—Ü–∏—è –æ–ø–∏—Å–∞–Ω–∏—è –ø—Ä–æ—Ç–æ–∫–æ–ª–∞ –æ–±—â–µ–Ω–∏—è –≤–Ω–µ—à–Ω–µ–≥–æ —É–ø—Ä–∞–≤–ª—è—é—â–µ–≥–æ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞ —Å HD600. –Ø –ø–æ–ø—Ä–æ–±—É—é –Ω–∞—á–∞—Ç—å –ø–∏—Å–∞—Ç—å –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ —Å–¥–µ–ª–∞—é –æ—Ç–ª–∞–¥–∫—É –≤ –ø—Ä–æ—Ç–µ—É—Å–µ, –≤ –∂–µ–ª–µ–∑–µ –ø–æ—Å–º–æ—Ç—Ä—é –ø–æ –æ–±—Å—Ç–æ—è—Ç–µ–ª—å—Å—Ç–≤–∞–º, –≤—Å—ë –∑–∞–≤–∏—Å–∏—Ç –∫–∞–∫ —É –º–µ–Ω—è —Å—Ç—Ä–æ–π–∫–∞ –ø–æ–π–¥—ë—Ç.
–ü. –°. –Ω–∞—à—ë–ª —è —Ç–µ—Ö–¥–æ–∫—É–º–µ–Ω—Ç–∞—Ü–∏—é –Ω–∞ –ø—Ä–æ—Ç–æ–∫–æ–ª, —Å –ø—Ä–∏—ë–º–æ–º –¥–∞–Ω–Ω—ã—Ö –æ—Ç –º–æ—Ç–æ—Ä –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞ –≤—Å—ë –ø–æ–Ω—è—Ç–Ω–æ. –ê —Å –¥–∞–Ω–Ω—ã–º–∏ –∫–æ—Ç–æ—Ä—ã–µ –Ω–∞–¥–æ –ø–µ—Ä–µ–¥–∞—Ç—å –º–æ—Ç–æ—Ä –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä—É –Ω–µ —Å–æ–≤—Å–µ–º –≤ —á–∞—Å—Ç–Ω–æ—Å—Ç–∏ –º–Ω–µ –Ω–µ —è—Å–Ω–∞ –¥–ª–∏–Ω–∞ —Å–æ–æ–±—â–µ–Ω–∏–π –∫–æ—Ç–æ—Ä—ã–µ –Ω–∞–¥–æ –ø–µ—Ä–µ–¥–∞–≤–∞—Ç—å, –æ–Ω–∏ —á—Ç–æ –≤ –∑–∞–≤–∏—Å–∏–º–æ—Å—Ç–∏ –æ—Ç –ø–æ—Å–ª–µ–¥–æ–≤–∞—Ç–µ–ª—å–Ω–æ—Å—Ç–∏ –¥–µ–π—Å—Ç–≤–∏–π –∫–∞–∂–¥—ã–π —Ä–∞–∑ –º–µ–Ω—è—é—Ç—Å—è?
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–ù–ï–ú–ï–¢–°
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß–∞—Å—Ç–æ—Ç–Ω—ã–π –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç —Ñ–µ–≤ 08, 2024 11:26:51 |
|
| –í—ã–º–æ–≥–∞—Ç–µ–ª—å –ø—Ä–∏–ø–æ—è |
|
–ö–∞—Ä–º–∞: 3
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 338
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –º–∞—Ä 31, 2016 13:47:04
–°–æ–æ–±—â–µ–Ω–∏–π: 655
–û—Ç–∫—É–¥–∞: –°–∞–º–∞—Ä–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
Yushik, —Ç–∞–º –∂–µ: "–Ý–µ–∫–æ–º–µ–Ω–¥—É–µ—Ç—Å—è –æ—Å—É—â–µ—Å—Ç–≤–ª—è—Ç—å –ø–æ—Å—Ç–æ—è–Ω–Ω—É—é –ø–µ—Ä–µ–¥–∞—á—É –¥–∞–Ω–Ω—ã—Ö –Ω–∞ –º–æ—Ç–æ—Ä–Ω—ã–π –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –≤ –≤–∏–¥–µ –ø–æ–≤—Ç–æ—Ä–æ–≤ —Ç–µ–∫—É—â–∏—Ö —É–ø—Ä–∞–≤–ª—è—é—â–∏—Ö –∫–æ–º–∞–Ω–¥, –ø–æ–ª—É—á–∞—è –æ–±—Ä–∞—Ç–Ω—É—é —Å–≤—è–∑—å –∏–∑ —Å—Ç—Ä–æ–∫–∏ —Å–æ—Å—Ç–æ—è–Ω–∏—è."
–ù–∞ –ø—Ä–∞–∫—Ç–∏–∫–µ –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ –ø—Ä–æ—Å—Ç–æ –ø–æ—Å—ã–ª–∞—Ç—å –º–æ—Ç–æ—Ä–Ω–æ–º—É –ª—é–±–æ–π —Å–∏–º–≤–æ–ª, –∫—Ä–æ–º–µ 0x20, –≤ –ø—Ä–µ–¥–µ–ª–∞—Ö –ø–µ—Ä–∏–æ–¥–∞ —Ç–∞–π–º–∞—É—Ç–∞ (100–º—Å)
_________________
HEMETC–∫–∏–π –∞—Ä—Ö–∏–≤: H8K –Ω–∞ yandex-–¥–∏—Å–∫–µ = H8K –Ω–∞ google-–¥–∏—Å–∫–µ
–ü–æ–∫–∞–∑–æ–º–µ—Ç—Ä—ã –Ω–∞ Arduino –∏ –¥—Ä—É–≥–∏–µ –í–æ—Å—å–º–∏–∫—Ä—É—Ç—ã (—Å—Ö–µ–º—ã, –ø–ª–∞—Ç—ã, –ø—Ä–æ—à–∏–≤–∫–∏, —Ñ–æ—Ç–æ)
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
Yushik
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß–∞—Å—Ç–æ—Ç–Ω—ã–π –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç —Ñ–µ–≤ 08, 2024 12:39:44 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –¥–µ–∫ 27, 2022 20:50:57
–°–æ–æ–±—â–µ–Ω–∏–π: 123
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ü–æ–Ω—è—Ç–Ω–æ —Ç–æ –µ—Å—Ç—å —è –ø—Ä–∏–Ω—è–ª –æ—Ç –º–æ—Ç–æ—Ä–Ω–æ–≥–æ –∫–æ–Ω—Ç—Ä–æ–ª—ë—Ä–∞ —Å–æ–æ–±—â–µ–Ω–∏–µ, –≤–∏–∂—É —á—Ç–æ —É –º–µ–Ω—è –Ω–µ —Å–æ–≤–ø–∞–ª–∏ –ø–∞—Ä–∞–º–µ—Ç—Ä—ã. –û—Ç–ø—Ä–∞–≤–ª—è—é –ø–∞—Ä–∞–º–µ—Ç—Ä—ã —Ä–∞–∑–≥–æ–Ω–∞ –∏ —Ç–æ—Ä–º–æ–∂–µ–Ω–∏—è, –æ—Ç–ø—Ä–∞–≤–ª—è—é –ø–∞—Ä–∞–º–µ—Ç—Ä —á–∞—Å—Ç–æ—Ç—ã. –î–∞–ª—å—à–µ —á—Ç–æ? –ö–∞–∫ —è –ø–æ–Ω—è–ª –Ω—É–∂–Ω–æ –æ—Ç–ø—Ä–∞–≤–∏—Ç—å –ø–∞—Ä–∞–º–µ—Ç—Ä —Å —Å–∏–º–≤–æ–ª–∞–º–∏ "<", ">" —Ç–∏–ø–∞ —è —É–≤–µ–ª–∏—á–∏–≤–∞—é –∏–ª–∏ —É–º–µ–Ω—å—à–∞—é —á–∞—Å—Ç–æ—Ç—É. –ü–æ—Å–ª–µ–¥–Ω–∏–º–∏ —è –æ—Ç–ø—Ä–∞–≤–ª—è—é –ø–∞—Ä–∞–º–µ—Ç—Ä—ã —Å —Å–∏–º–≤–æ–ª–∞–º–∏ "v", "n" –∏ "s" –æ–Ω–∏ –∑–∞–ø—É—Å–∫–∞—é—Ç –∏ –æ—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞—é—Ç –ø—Ä–∏–≤–æ–¥. –ï—Å–ª–∏ –≤ –æ—Ç–≤–µ—Ç–Ω–æ–º —Å–æ–æ–±—â–µ–Ω–∏–∏ –≤ –Ω–∞—á–∞–ª–µ –ø–æ—Å–ª–µ —Å–∏–º–≤–æ–ª–∞ –ø–µ—Ä–µ–≤–æ–¥–∞ —Å—Ç—Ä–æ–∫–∏ 0x0D, –ø—Ä–∏—Å—É—Ç—Å—Ç–≤—É—é—Ç –±–∞–π—Ç—ã —Å —Å–∏–º–≤–æ–ª–∞–º–∏ F01, F02, F03 –ø–æ–Ω—è—Ç–Ω–æ —á—Ç–æ –æ–Ω–∏ –ø—Ä–∏–æ—Ä–∏—Ç–µ—Ç–Ω—ã–µ. –Ø –ø—Ä–∞–≤–∏–ª—å–Ω–æ –ø–æ–Ω—è–ª –∞–ª–≥–æ—Ä–∏—Ç–º –æ–±—â–µ–Ω–∏—è —Å –º–æ—Ç–æ—Ä–Ω—ã–º –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–æ–º.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–ù–ï–ú–ï–¢–°
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß–∞—Å—Ç–æ—Ç–Ω—ã–π –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç —Ñ–µ–≤ 08, 2024 14:34:09 |
|
| –í—ã–º–æ–≥–∞—Ç–µ–ª—å –ø—Ä–∏–ø–æ—è |
|
–ö–∞—Ä–º–∞: 3
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 338
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –º–∞—Ä 31, 2016 13:47:04
–°–æ–æ–±—â–µ–Ω–∏–π: 655
–û—Ç–∫—É–¥–∞: –°–∞–º–∞—Ä–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–Ø –ø—Ä–∞–≤–∏–ª—å–Ω–æ –ø–æ–Ω—è–ª –∞–ª–≥–æ—Ä–∏—Ç–º –ù–µ—Ç. 0x20 —ç—Ç–æ "–ø—Ä–æ–±–µ–ª" - –≥—É–≥–ª–∏—Ç–µ "ASCII table". –î–ª—è –ø–æ–Ω–∏–º–∞–Ω–∏—è —Ä–µ–∫–æ–º–µ–Ω–¥—É—é –Ω–∞—Ä–∏—Å–æ–≤–∞—Ç—å –≤—Å–µ –≤–º–µ—Å—Ç–µ –≤ –ø—Ä–æ—Ç–µ—É—Å–µ, –¥–æ–±–∞–≤–∏—Ç—å –ø–∞—Ä—É Virtual Terminal (baud rate = 2400), –æ–¥–∏–Ω –ø–æ–≤–µ—Å–∏—Ç—å –Ω–∞ RX, –≤—Ç–æ—Ä–æ–π - –Ω–∞ TX (–º–æ—Ç–æ—Ä–Ω–æ–≥–æ), –∏ –∫–∞–∫–æ–µ-—Ç–æ –≤—Ä–µ–º—è –Ω–∞ –≤—Å–µ —ç—Ç–æ –ø–æ–≥–ª–∞–∑–µ—Ç—å.
_________________
HEMETC–∫–∏–π –∞—Ä—Ö–∏–≤: H8K –Ω–∞ yandex-–¥–∏—Å–∫–µ = H8K –Ω–∞ google-–¥–∏—Å–∫–µ
–ü–æ–∫–∞–∑–æ–º–µ—Ç—Ä—ã –Ω–∞ Arduino –∏ –¥—Ä—É–≥–∏–µ –í–æ—Å—å–º–∏–∫—Ä—É—Ç—ã (—Å—Ö–µ–º—ã, –ø–ª–∞—Ç—ã, –ø—Ä–æ—à–∏–≤–∫–∏, —Ñ–æ—Ç–æ)
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Yushik
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß–∞—Å—Ç–æ—Ç–Ω—ã–π –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç —Ñ–µ–≤ 08, 2024 15:07:01 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –¥–µ–∫ 27, 2022 20:50:57
–°–æ–æ–±—â–µ–Ω–∏–π: 123
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–Ø –∑–Ω–∞—é —á—Ç–æ 0x20 —ç—Ç–æ –ø—Ä–æ–±–µ–ª, –º–µ–Ω—è –∏–Ω—Ç–µ—Ä–µ—Å—É–µ—Ç –ø–æ—Å–ª–µ–¥–æ–≤–∞—Ç–µ–ª—å–Ω–æ—Å—Ç—å –æ—Ç–ø—Ä–∞–≤–∫–∏ —Å–æ–æ–±—â–µ–Ω–∏–π —á—Ç–æ–± –∑–∞–ø—É—Å—Ç–∏—Ç—å –ø—Ä–∏–≤–æ–¥. –û—Ç–ø—Ä–∞–≤–∏–ª —è –ø–∞—Ä–∞–º–µ—Ç—Ä—ã —Ç–æ—Ä–º–æ–∂–µ–Ω–∏—è –∏ —Ä–∞–∑–≥–æ–Ω–∞, –æ–Ω –∏—Ö –ø—Ä–∏–º–µ—Ç —è –Ω–µ —Å–æ–º–Ω–µ–≤–∞—é—Å—å. –û—Ç–ø—Ä–∞–≤–∏–ª —è –ø–∞—Ä–∞–º–µ—Ç—Ä —Å –∑–∞–¥–∞–Ω–∏–µ–º —á–∞—Å—Ç–æ—Ç—ã, –¥–∞–ª—å—à–µ –º–Ω–µ –Ω–µ –ø–æ–Ω—è—Ç–Ω–æ?
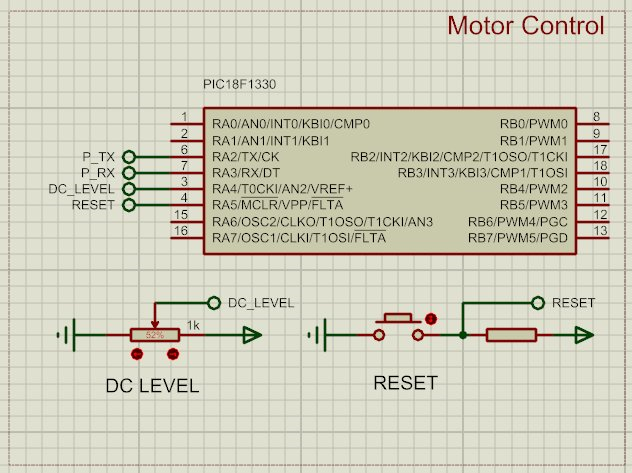
–ü—Ä–æ—Ç–µ—É—Å –º–Ω–µ –≤ –ª—é–±–æ–º —Å–ª—É—á–∞–µ —Ä–∏—Å–æ–≤–∞—Ç—å –ø—Ä–∏–¥—ë—Ç—Å—è, –∑–Ω–∞—á–∏—Ç –ø—Ä–∏–¥—ë—Ç—Å—è —Ç–µ—Ä–º–∏–Ω–∞–ª—ã —Å—Ç–∞–≤–∏—Ç—å —Ç–∞–º –∏ —Ä–∞–∑–±–∏—Ä–∞—Ç—å—Å—è. –ï—Å–ª–∏ —É –∫–æ–≥–æ –µ—Å—Ç—å –≥–æ—Ç–æ–≤—ã–π —Ñ–∞–π–ª –¥–ª—è —Å–∏–º—É–ª—è—Ü–∏–∏ –±—É–¥—É —Ä–∞–¥. –ò–ª–∏ –ø–æ–¥—Å–∫–∞–∂–∏—Ç–µ –∫–∞–∫–æ–µ –º–Ω–µ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ –≤—ã—Å—Ç–∞–≤–∏—Ç—å –ø–æ—Ç–µ–Ω—Ü–∏–æ–º–µ—Ç—Ä–∞–º–∏ –Ω–∞ –≤—ã–≤–æ–¥–∞—Ö 2 –∏ 3 PIC18F1330.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–ù–ï–ú–ï–¢–°
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß–∞—Å—Ç–æ—Ç–Ω—ã–π –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç —Ñ–µ–≤ 08, 2024 16:29:27 |
|
| –í—ã–º–æ–≥–∞—Ç–µ–ª—å –ø—Ä–∏–ø–æ—è |
|
–ö–∞—Ä–º–∞: 3
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 338
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –º–∞—Ä 31, 2016 13:47:04
–°–æ–æ–±—â–µ–Ω–∏–π: 655
–û—Ç–∫—É–¥–∞: –°–∞–º–∞—Ä–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–û—Ç–ø—Ä–∞–≤–∏–ª —è –ø–∞—Ä–∞–º–µ—Ç—Ä —Å –∑–∞–¥–∞–Ω–∏–µ–º —á–∞—Å—Ç–æ—Ç—ã, –¥–∞–ª—å—à–µ –º–Ω–µ –Ω–µ –ø–æ–Ω—è—Ç–Ω–æ? "–ö–æ–º–∞–Ω–¥—ã –≤–∫–ª—é—á–µ–Ω–∏—è –∏ –æ—Ç–∫–ª—é—á–µ–Ω–∏—è:
v – команда включения привода, вращение вперёд
n – команда включения привода, вращение назад
s – команда остановки привода с темпом торможения по задатчику интенсивности"Чо там рисовать? 
_________________
HEMETC–∫–∏–π –∞—Ä—Ö–∏–≤: H8K –Ω–∞ yandex-–¥–∏—Å–∫–µ = H8K –Ω–∞ google-–¥–∏—Å–∫–µ
–ü–æ–∫–∞–∑–æ–º–µ—Ç—Ä—ã –Ω–∞ Arduino –∏ –¥—Ä—É–≥–∏–µ –í–æ—Å—å–º–∏–∫—Ä—É—Ç—ã (—Å—Ö–µ–º—ã, –ø–ª–∞—Ç—ã, –ø—Ä–æ—à–∏–≤–∫–∏, —Ñ–æ—Ç–æ)
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Yushik
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß–∞—Å—Ç–æ—Ç–Ω—ã–π –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç —Ñ–µ–≤ 08, 2024 18:59:16 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –¥–µ–∫ 27, 2022 20:50:57
–°–æ–æ–±—â–µ–Ω–∏–π: 123
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ö–∞–∫ –º–Ω–µ –Ω–∞—Å—Ç—Ä–æ–∏—Ç—å –æ–±–∞ PIC-–∞ (1330 –∏ 690) –≤ –ø—Ä–æ—Ç–µ—É—Å–µ, —è –∏—Ö –Ω–∏–∫–æ–≥–¥–∞ –≤ –∂–∏–∑–Ω–∏ –Ω–µ —Å–∏–º—É–ª–∏—Ä–æ–≤–∞–ª, –≤—Å—é –∂–∏–∑–Ω—å –∑–∞–Ω–∏–º–∞–ª—Å—è —Ç–æ–ª—å–∫–æ AVR-–∫–∞–º–∏.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
DC-AC
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß–∞—Å—Ç–æ—Ç–Ω—ã–π –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç —Ñ–µ–≤ 08, 2024 19:54:07 |
|
| –°–æ–±—É—Ç—ã–ª—å–Ω–∏–∫ –ö–æ—Ç–∞ |
–ö–∞—Ä–º–∞: 48
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 895
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –∏—é–Ω 26, 2014 00:04:37
–°–æ–æ–±—â–µ–Ω–∏–π: 2973
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Yushik
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß–∞—Å—Ç–æ—Ç–Ω—ã–π –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å –î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç —Ñ–µ–≤ 08, 2024 23:22:57 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –¥–µ–∫ 27, 2022 20:50:57
–°–æ–æ–±—â–µ–Ω–∏–π: 123
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ë–ª–∞–≥–æ–¥–∞—Ä—é –∑–∞ —Ñ–∞–π–ª—ã DC-AC —Ä–∞–∑–æ–±—Ä–∞–ª—Å—è —è –ø–æ—á–µ–º—É –º–æ–∏ –Ω–µ —Ä–∞–±–æ—Ç–∞–ª–∏, —É –º–µ–Ω—è –¥–∏—Å–ø–ª–µ–∏ –ø–æ–∫–∞–∑—ã–≤–∞–ª–∏ –∫–∞–∫—É—é-—Ç–æ –∞—Ö–∏–Ω–µ—é. –í –Ω–∞—Å—Ç—Ä–æ–π–∫–∞—Ö –¥–∏—Å–ø–ª–µ—è –Ω–∞–¥–æ –±—ã–ª–æ –Ω–∞—Å—Ç—Ä–æ–∏—Ç—å "Minimum trigger time", –ø—Ä–æ—Å–º–æ—Ç—Ä–µ–ª —è –ø—Ä–æ—Ç–æ–∫–æ–ª –æ–±—â–µ–Ω–∏—è –≤ —Ç–µ—Ä–º–∏–Ω–∞–ª–∞—Ö –≤ –æ–±—â–µ–º-—Ç–æ –Ω–∏—á–µ–≥–æ –æ—Å–æ–±–µ–Ω–Ω–æ–≥–æ. –ù–æ –µ—Å–ª–∏ —ç—Ç–æ–≥–æ –Ω–µ –∑–Ω–∞—Ç—å —Ç–æ –∫–æ–Ω–µ—á–Ω–æ –æ–±—â–∏–π —è–∑—ã–∫ —Å –º–æ—Ç–æ—Ä–Ω—ã–º –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–æ–º –Ω–µ –Ω–∞–π–¥—ë—à—å. –ú–Ω–µ –∫–æ–Ω–µ—á–Ω–æ –Ω–µ —Å–æ–≤—Å–µ–º –ø–æ–Ω—è—Ç–Ω–æ –∑–∞—á–µ–º —Ç–∞–∫–∞—è –Ω–∏–∑–∫–∞—è —Å–∫–æ—Ä–æ—Å—Ç—å UART 2400 –±–æ–¥ –≤—Å–µ–≥–æ, –µ–¥–∏–Ω—Å—Ç–≤–µ–Ω–Ω–æ–µ –æ–±—ä—è—Å–Ω–µ–Ω–∏–µ –∫–æ—Ç–æ—Ä–æ–µ —è –º–æ–≥—É –Ω–∞–π—Ç–∏ —ç—Ç–æ –∫–∞–∫ —Ç–æ –Ω–∏–≤–µ–ª–∏—Ä–æ–≤–∞—Ç—å —Ä–∞–±–æ—Ç—É PIC16F690 –æ—Ç –Ω–µ—Å—Ç–∞–±–∏–ª—å–Ω–æ–≥–æ –≤–Ω—É—Ç—Ä–µ–Ω–Ω–µ–≥–æ RC-–≥–µ–Ω–µ—Ä–∞—Ç–æ—Ä–∞.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Fazinur
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß–∞—Å—Ç–æ—Ç–Ω—ã–π –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç —Ñ–µ–≤ 09, 2024 18:16:44 |
|
| –ü—Ä–æ—Ä–µ–∑–∞–ª–∏—Å—å –∑—É–±—ã |
–ö–∞—Ä–º–∞: -5
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: -50
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –º–∞—Ä 13, 2022 11:23:48
–°–æ–æ–±—â–µ–Ω–∏–π: 205
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–î–æ–±–∞–≤–ª–µ–Ω–æ after 2 hours 30 minutes 8 seconds:–ö–∞–∫ –º–Ω–µ –Ω–∞—Å—Ç—Ä–æ–∏—Ç—å –æ–±–∞ PIC-–∞ (1330 –∏ 690) –≤ –ø—Ä–æ—Ç–µ—É—Å–µ, —è –∏—Ö –Ω–∏–∫–æ–≥–¥–∞ –≤ –∂–∏–∑–Ω–∏ –Ω–µ —Å–∏–º—É–ª–∏—Ä–æ–≤–∞–ª, –≤—Å—é –∂–∏–∑–Ω—å –∑–∞–Ω–∏–º–∞–ª—Å—è —Ç–æ–ª—å–∫–æ AVR-–∫–∞–º–∏. –í —Å–≤–æ–π—Å—Ç–≤–∞—Ö –∫–∞–º–Ω—è —É–∫–∞–∑—ã–≤–∞–µ—à—å –ø—É—Ç—å –¥–æ HEX –ø—Ä–æ—à–∏–≤–∫–∏, —Ç–∞–º –∂–µ –≤—ã—Å—Ç–∞–≤–ª—è–µ—à—å —á–∞—Å—Ç–æ—Ç—É –∏ –∫–æ–Ω—Ñ–∏–≥—É—Ä–∞—Ü–∏–æ–Ω–Ω–æ–µ —Å–ª–æ–≤–æ.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Yushik
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß–∞—Å—Ç–æ—Ç–Ω—ã–π –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç —Ñ–µ–≤ 09, 2024 20:09:28 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –¥–µ–∫ 27, 2022 20:50:57
–°–æ–æ–±—â–µ–Ω–∏–π: 123
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–°–ø–∞—Å–∏–±–æ –∑–∞ –ø–æ–¥—Å–∫–∞–∑–∫—É —É–∂–µ —Ä–∞–∑–æ–±—Ä–∞–ª—Å—è, –¥—É–º–∞–ª –Ω–∞–¥ –∫–æ–Ω—Ü–µ–ø—Ü–∏–µ–π —Å–≤–æ–µ–≥–æ —É–ø—Ä–∞–≤–ª—è—é—â–µ–≥–æ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞ –≤—ã–±–æ—Ä –ø–æ–∫–∞ –ø–∞–ª –Ω–∞ Atmega8. –ò–∑ –ø–µ—Ä–∏—Ñ–µ—Ä–∏–∏ —á—Ç–æ —è —Ö–æ—á—É –ø–æ—Å—Ç–∞–≤–∏—Ç—å, –¥–≤–∞ –ø–æ—Ç–µ–Ω—Ü–∏–æ–º–µ—Ç—Ä–∞, —ç–Ω–∫–æ–¥–µ—Ä –∏ —á–µ—Ç—ã—Ä–µ –∫–Ω–æ–ø–∫–∏. –í–æ–ø—Ä–æ—Å –æ—Å—Ç–∞–ª—Å—è –∑–∞ –¥–∏—Å–ø–ª–µ–µ–º —Ö–æ—Ç–µ–ª –ø–æ—Å—Ç–∞–≤–∏—Ç—å —Å–µ–º–∏—Å–µ–≥–º–µ–Ω—Ç–Ω—ã–π —É –Ω–∏—Ö –±–æ–ª—å—à–æ–π –ø–ª—é—Å —á—Ç–æ –∏—Ö –≤–∏–¥–Ω–æ –∏–∑ –¥–∞–ª–µ–∫–∞, –∞ —Ç—É—Ç –±–∞—Ü –∏ –Ω–æ–≥ —É –ú–ö —É–∂–µ –Ω–µ —Ö–≤–∞—Ç–∞–µ—Ç. –¢–∞–∫ —á—Ç–æ –≤—ã–±–æ—Ä –ø–æ–∫–∞ —É–ø–∞–ª –Ω–∞ 1602, —Å –Ω–∏–º —Ç–µ–º –±–æ–ª–µ–µ —Ä–∞–±–æ—Ç–∞—Ç—å –ª–µ–≥—á–µ —á–µ–º —Å —Å–µ–º–∏—Å–µ–Ω–º–µ–Ω—Ç–Ω—ã–º–∏. –í –ø–æ—Å–ª–µ–¥—Å—Ç–≤–∏–∏ –≤–æ–∑–º–æ–∂–Ω–æ –ø—Ä–µ–¥—É—Å–º–æ—Ç—Ä—é —É–Ω–∏–≤–µ—Ä—Å–∞–ª—å–Ω—É—é –ø–ª–∞—Ç—É, –ø—Ä–æ—à–∏–≤–∫–∏ –±—É–¥—É—Ç —Ä–∞–∑–Ω—ã–µ –ø–æ–¥ 1602 –∏ —Å–µ–º–∏—Å–µ–≥–º–µ–Ω—Ç–Ω—ã–µ –Ω–∞ –±–∞–∑–µ —Å–¥–≤–∏–≥–æ–≤—ã—Ö —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ –ø–æ SPI —à–∏–Ω–µ.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Fazinur
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß–∞—Å—Ç–æ—Ç–Ω—ã–π –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç —Ñ–µ–≤ 09, 2024 20:11:52 |
|
| –ü—Ä–æ—Ä–µ–∑–∞–ª–∏—Å—å –∑—É–±—ã |
–ö–∞—Ä–º–∞: -5
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: -50
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Å –º–∞—Ä 13, 2022 11:23:48
–°–æ–æ–±—â–µ–Ω–∏–π: 205
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ú–æ–∂–Ω–æ –≤–æ–æ–±—â–µ —Å–æ–±—Ä–∞—Ç—å –Ω–∞ –±–∞–∑–µ ESP32, –±—É–¥–µ—à—å —É–ø—Ä–∞–≤–ª—è—Ç—å —á–∞—Å—Ç–æ—Ç–Ω–∏–∫–æ–º —á–µ—Ä–µ–∑ –≤–∞–π—Ñ–∞–π. –û–Ω–∏ –∫—Å—Ç–∞—Ç–∏ –æ—á–µ–Ω—å –¥–µ—à–µ–≤—ã–µ.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Yushik
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ß–∞—Å—Ç–æ—Ç–Ω—ã–π –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç —Ñ–µ–≤ 09, 2024 20:47:59 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –¥–µ–∫ 27, 2022 20:50:57
–°–æ–æ–±—â–µ–Ω–∏–π: 123
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–í–∞–π —Ñ–∞–π –º–Ω–µ –Ω–µ –Ω—É–∂–µ–Ω –≤ —á–∞—Å—Ç–æ—Ç–Ω–∏–∫–µ —ç—Ç–æ –Ω–µ –≤–µ–Ω—Ç–∏–ª—è—Ç–æ—Ä –≤ —Å–æ—Ä—Ç–∏—Ä–µ, –∫–æ—Ç–æ—Ä—ã–π —Ö–æ—á–µ—Ç—Å—è –Ω–µ –≤—ã—Ö–æ–¥—è –∏–∑ –∫—Ä–æ–≤–∞—Ç–∏ –æ—Ç–∫–ª—é—á–∞—Ç—å. ESP32 —ç—Ç–æ –æ—Ç–¥–µ–ª—å–Ω–∞—è —Ç–µ–º–∞ –∏—Ö –Ω—É–∂–Ω–æ –∏–∑—É—á–∞—Ç—å –Ω–∞ —ç—Ç–æ —É –º–µ–Ω—è –≤—Ä–µ–º–µ–Ω–∏ –Ω–µ—Ç. –ò –∫—Å—Ç–∞—Ç–∏ –Ω–µ —Ç–∞–∫–∏–µ —É–∂ –æ–Ω–∏ –∏ –∫—Ä—É—Ç—ã–µ –≤ –Ω–∏—Ö –ø–æ –º–æ–µ–º—É –≤—Å–µ–≥–æ 2 —Ç–∞–π–º–µ—Ä–∞ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–π, —è –Ω–µ –±—É–¥—É –≤—Ä–∞—Ç—å —É —Ç–æ–≥–æ –∂–µ PIC 18F1330 3 —Ç–∞–π–º–µ—Ä–∞ —Å –¥–≤—É–º—è —Ä–µ–≥–∏—Å—Ç—Ä–∞–º–∏ —Å—Ä–∞–≤–Ω–µ–Ω–∏—è —É –∫–∞–∂–¥–æ–≥–æ. –ü–æ—ç—Ç–æ–º—É –∞–≤—Ç–æ—Ä –µ–≥–æ –∏ –≤–∑—è–ª —á—Ç–æ–± –∑–∞–¥–µ–π—Å—Ç–≤–æ–≤–∞—Ç—å –≤—Å–µ —à–µ—Å—Ç—å –∫–∞–Ω–∞–ª–æ–≤ PWM.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
|
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 636 –∏–∑ 675
|
[ –°–æ–æ–±—â–µ–Ω–∏–π: 13485 ] |
... , , , , , , ... |
–ö—Ç–æ —Å–µ–π—á–∞—Å –Ω–∞ —Ñ–æ—Ä—É–º–µ |
–°–µ–π—á–∞—Å —ç—Ç–æ—Ç —Ñ–æ—Ä—É–º –ø—Ä–æ—Å–º–∞—Ç—Ä–∏–≤–∞—é—Ç: –Ω–µ—Ç –∑–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω–Ω—ã—Ö –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª–µ–π –∏ –≥–æ—Å—Ç–∏: 36 |
|
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –Ω–∞—á–∏–Ω–∞—Ç—å —Ç–µ–º—ã
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –æ—Ç–≤–µ—á–∞—Ç—å –Ω–∞ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ —É–¥–∞–ª—è—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –¥–æ–±–∞–≤–ª—è—Ç—å –≤–ª–æ–∂–µ–Ω–∏—è
|
|
|