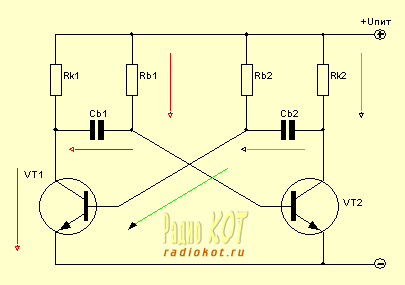
Базовые резисторы должны быть раз в 10-20 больше коллекторных.
При 100 Ом в коллекторах они и будут греться. Если скважность 2, то мощность при питании 12 В будет на них выделяться 0,7 Вт на каждом.
rl55 писал(а):Базовые резисторы должны быть раз в 10-20 больше коллекторных.При 100 Ом в коллекторах они и будут греться. Если скважность 2, то мощность при питании 12 В будет на них выделяться 0,7 Вт на каждом.
базовые 1,3 кОм 1 Вт - не греются.
Так почему греются коллекторные резисторы? Ведь при 100 Ом и 12 вольт сила тока будет 0,12 А, а значит ваттность 12*0,12=1,44, а они у меня на 5 Вт. Так почему греются так сильно?
От каждого по возможности - каждому по потребности
Попробовал ради интереса подключить соизмеримый резистор МЛТ-2 100 Ом к 12 В - палец можно еще удержать, но при 14 В мой палец уже не терпит.
Но в работающем мультивибраторе при скважности 2 средняя мощность на каждом резисторе будет в два раза меньше.
А, может, питание все же больше 12 В? Мощность ведь пропорциональна квадрату напряжения.
rl55 писал(а):Попробовал ради интереса подключить соизмеримый резистор МЛТ-2 100 Ом к 12 В - палец можно еще удержать, но при 14 В мой палец уже не терпит.
Но в работающем мультивибраторе при скважности 2 средняя мощность на каждом резисторе будет в два раза меньше.
А, может, питание все же больше 12 В? Мощность ведь пропорциональна квадрату напряжения.
Обычный аккумулятор из бесперебойника, 12-13 вольт на нём замерял
От каждого по возможности - каждому по потребности
isx писал(а):Если с МК вычислять угловое перемещение и ускорение и задать начальную точку, то можно ли такое реализовать?
Ну, так оно и делается, причём не только угловое (от гироскопа), но и линейное (от акселерометров - я уже не в первый раз напоминаю про это). Вопрос о точности остаётся конечно открытым - здесь в огромной степени всё зависит от точности самих датчиков и точности, с которой данные от них могут быть обработаны.
Ну, а магнитометр - это таки в первую очередь компас...
Конечно используются. В аппаратуре автопилотов без них вообще никак. Моделисты делают. Но задача, скажем, даже не среднего уровня (скажу честно - не уровня завсегдатаев данного форума, не хочу никого обидеть, но увы...). Математика достаточно сложна. Поэтому, кто не искушён, используют готовые решения. В частности, тут уже давали ссылку на гироскоп от ST (а на деле такие делают и другие фирмы), можете заценить уровень, необходимый для обращения с этим устройством.
Читаю, читаю, и толком не въеду в работу гироскопа и акселя.
Из того, что я усвоил, вряд ли получиться осуществить мою мысль.
Я хотел сделать типо такого: берём кота (за него не переживайте, всё с ним нормально будет ) и цепляем на спину датчики, МК и радиомодуль. Запускаем его в комнату, которую заранее смоделировали на компе с определённым ПО. Далее (опять таки с помощью спец. ПО) на мониторе рисуется точная траектория перемещения нашего шерстяного друга (побежал вперёд, свернул налево и прыгнул на стул). Поскольку комната и объекты в ней были заранее смоделированы и занесены в комп, то на экране мы видим, как наш датчик (тобиш кот) сидит на стуле. И так наблюдаем около часа (не ловя погрешностей). В конце кот встаёт на отмеченную точку, комп опознаёт, что он на нужном месте и выпускает кота
Я этого делать не планирую (хотя интереса ради можно было бы ), просто пока к электронике доступа нет, тренирую фантазию, и ищу способы решение бесполезных, но интересных задач
Ну, если не вдаваться в математику с её кучей синусов и тангенсов, то понятийно всё достаточно просто.
Гироскоп. Это такая штука, которая показывает изменения ориентации объекта в пространстве.
Акселерометр. Эта штука показывает изменения скорости объекта.
Каждая из этих вещей соответственно трёхосевая для полного контроля пространства, и двухосевая для контроля на плоскости.
Конструктивную суть данных приборов не рассматривам - она может быть разной, в частности, гироскоп можно реализовать и на датчиках ускорения, и даже больше - имея полный набор дифференциальных датчиков, математической обработкой получить данные обоих видов.
Часы - вопросов не вызывают.
Для расчёта новых координат относительно прошлых, необходимо знать а) текущие скорость и координаты б) изменение направления и скорости движения. Естественно, это делается по всем осям. Засекая время, высчитываем, насколько всё изменилось, и где будет новая точка местоположения. Фактически, считаем изменяющийся текущий вектор через малые приращения.
раз уж дело дошло до животных, гдето на форумах, может даже на этом, попадалось интересное решение стабилизатора видеокамеры. решение было оригинальным. на голову петуха (или курицы) закрепляли видеокамеру. саму курицу держали на весу в руках, а сами в это время двигались на моторном катере по волнам. Курица держала координатную точку не хуже гироскопа.
насчет кота и нужной точки. как на мой взгляд проще применить видеокамеру. направив ее на определенную точку, (например тапочки). и кадр с этой камеры сравнивать со статическим кадром, снятым заранее. как только кот пойдет приспосабливать тапочки, кадр изменится, и тут же пушка Гаусса метнет в него веником или ботинком
а на кота нацеплять гироскопы и датчики движения, представьте, сколько проводов тянуть к компу. Да и самому коту это может не понравиться. тут уж может лучше GPS нафигатор приспособить?
про петуха можно загуглить "стабилизатор положения ВИДЕО камеры"
Последний раз редактировалось oleg63m Вс фев 16, 2014 21:58:21, всего редактировалось 1 раз.
Шекспир сказал: Судить меня -дано лишь Богу, другим я укажу дорогу... https://natribu.org/
Я его полностью поддерживаю.
Программирую на Fuse AtmelAVR.