Доброго всем времени суток!
Разбираюсь с датчиком температуры DS18B20, читаю материалы в сети.
Поясните:
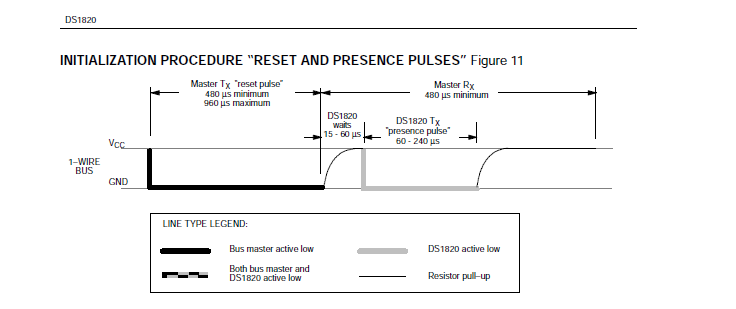
1. Как я понимаю, вся работа с датчиком производится путём перевода шины в "0" на определенный временной интервал.
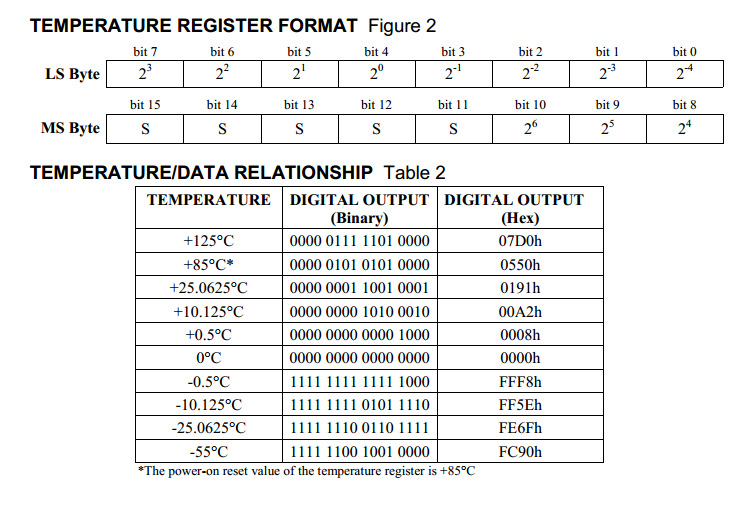
2. Как происходит чтение температуры в 9-ти битовом формате?
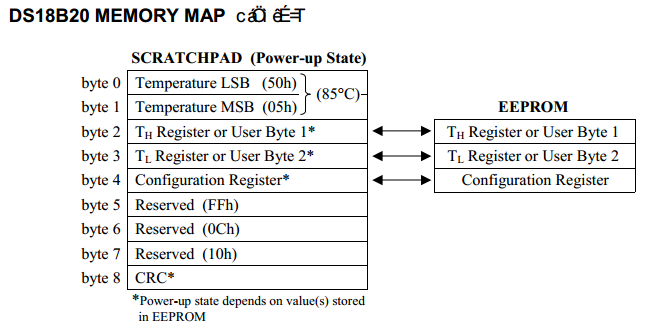
3. В каком формате датчик предоставляет температуру МК.
Необходимо собрать термостат на DS18B20 и Atmega16, а с 1wire шиной никогда дела не имел.
Спасибо!
Разбираюсь с датчиком температуры DS18B20, читаю материалы в сети.
Поясните:
1. Как я понимаю, вся работа с датчиком производится путём перевода шины в "0" на определенный временной интервал.
2. Как происходит чтение температуры в 9-ти битовом формате?
3. В каком формате датчик предоставляет температуру МК.
Необходимо собрать термостат на DS18B20 и Atmega16, а с 1wire шиной никогда дела не имел.
Спасибо!
Если бы это было так, это бы еще ничего. Если бы ничего, то так бы оно и было. Но так как это не так, так оно и не эдак. Такова логика вещей. (с)