А какой длины используете телескопические направляющие?
Лазерная установка для засветки фоторезиста от AlphaCrow
- Сообщения: 229
- Зарегистрирован: Вс авг 12, 2012 20:02:01
- Реклама
Давненько была куплена ШВП1204. Хотел ее поставить на новую установку. Но пока с финансами туго, не получается начать. Поставил этот винт заместо текущего М8. Микрошаг выставил 1/8. Получилось как у автора, 400 имп. на 1 мм. По звуку как вроде по приятней работает. Точность, вроде тоже ничего не изменилось. Люфтов нет. Попробую на следующей плате, изменится что, или нет. 
Прототипы печатных плат на заказ https://radiokot.ru/forum/viewtopic.php?f=54&t=122701
- Реклама


Кто-нибудь делал каретку на железе от принтера HP 920C? Получилось настроить?
Не могу никак ПИД настроить... трещит, дергается. Чуть похоже на правду получается при всех регуляторах выкрученных в ноль.
Немного можно поднять пропорциональный, а дальше начинается пила зубастая на графике с треском...
При малейшем сдвиге интегрального регулятора на 0.001 начинаются длительные замирания движения каретки с последующим резким срывом и кратковременным движением.
Направляющая смазанная. Руками двигается легко. Люфт не сильно большой. Напряжение сдвига каретки 4.2 вольта.
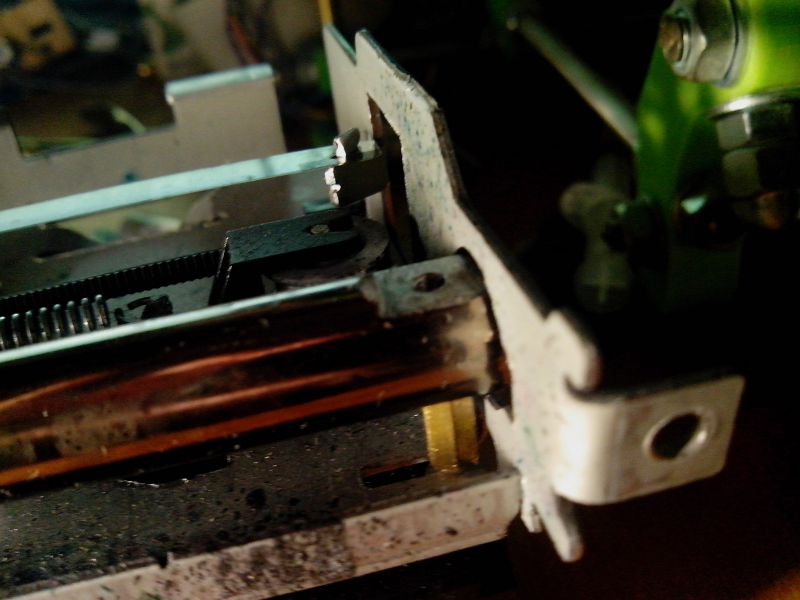
Железо как на этом фото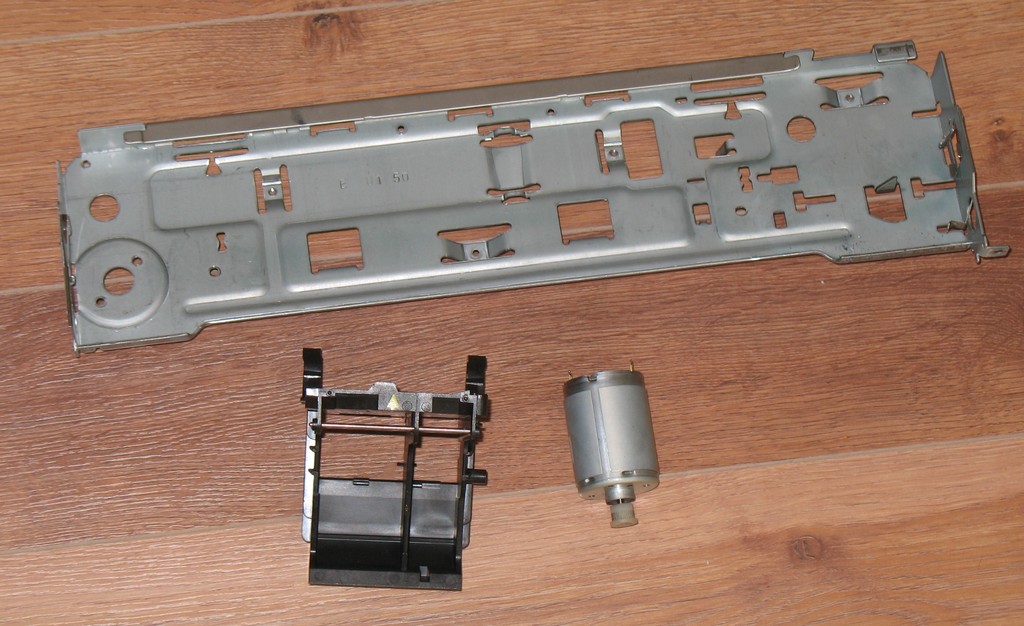
Не могу никак ПИД настроить... трещит, дергается. Чуть похоже на правду получается при всех регуляторах выкрученных в ноль.
Немного можно поднять пропорциональный, а дальше начинается пила зубастая на графике с треском...
При малейшем сдвиге интегрального регулятора на 0.001 начинаются длительные замирания движения каретки с последующим резким срывом и кратковременным движением.
Направляющая смазанная. Руками двигается легко. Люфт не сильно большой. Напряжение сдвига каретки 4.2 вольта.
Железо как на этом фото
Спойлер
- Сообщения: 34
- Зарегистрирован: Чт июл 23, 2015 17:33:48
А как вы вал закрепили, чтоб не болтался? Я из за того что там вал еще на 2 винта крепится его забраковал. Болтается, собакаvilkin писал(а):HP 920C
- Реклама

Я проделал другие отверстия под винты... Концы вала обработал дремелем, просверлил насквозь, нарезал резьбу M3 и вкрутил стойки латунные. Сами стойки прикрутил к станине. Получилось надежно и жестко.Markusha писал(а):А как вы вал закрепили, чтоб не болтался?
- Реклама
- Сообщения: 34
- Зарегистрирован: Чт июл 23, 2015 17:33:48
Мда.. Спасибо, однако. Я то посчитал что если вал не берет напильник - не выйдет обработать, так как каленый. А оно вот как, ну, будем попробоватьvilkin писал(а):...
- Реклама

Закалка на валу очень не глубокая.
На дремель насадил отрезной круг сделанный из круга от болгарки... ножницами вырезал из большого маленький.
На дремель насадил отрезной круг сделанный из круга от болгарки... ножницами вырезал из большого маленький.
- Сообщения: 31
- Зарегистрирован: Вс фев 01, 2009 21:08:46
Подскажите, а сколько у вас ширина оси по которой катается каретка? Прост хочу собрать механику с нуля, есть отдельно энкодерная лента и сам энкодер для нее (в свое время остались после разбора широкоформатника А1).
40см вместе с зоной парковки, но туда не заезжает. Можно отрезать еще 5 см смело.
А кто то использует лазерный модуль с родным драйвером, или не хватит быстродействия?


Приветствую,
Я немного писал в теме про принтер , который переделываю. В общем хотел по максимуму использовать то что в нем находится, поэтому разобрался с родной платой управления. Там используется многоканальный драйвер двигателей, в моем случае задействованы 3 канала из 4, плюс в драйвер встроены импульсные понижающие стабилизаторы (3шт), которые можно настроить внешними делителями на произвольное напряжение. Сам драйвер запитан напряжением 32В и в принтере формирует напряжения питания 1.8 3.3 и 5В. Для управления каждым из двигателей используется два сигнала - EN, PHASE , причем шим можно осуществлять только по входу PHASE, вход EN низкоскоростной, поэтому сигналу шим 50% соответствует нулевой ток через двигатель , 0% и 100% соответствуют -V и +V на двигателе. Кроме того в момент включения питания драйвер должен быть проинициализирован - задается режим его работы, включаются стабилизаторы и нужные выходы. Эта инициализация производится по входам PHASE первых двух двигателей , один из которых становится линией данных, второй - тактами. Еще есть глобальный вход драйвера, который его включает/выключает. В общей сложности в принтере нужно управлять двумя двигателями каждый из которых снабжен оптическим энкодером. Такая вот общая картина.
Теперь к вопросам Я так немного полистал прошивку, и вроде с инициализацией драйвера понятно что делать. Но вот второй энкодер по моему туда легко не впишется, вся прошивка завязана на обработку прерываний по единственному энкодеру. Видимо нужно подключать энкодеры к аппаратным входам таймеров в режиме энкодера, и затем с регулярной частотой их оцифровывать для управления двигателями, это потребует более сложного управления лазером, надо будет каскадировать таймеры. Учитывая объем требуемых изменений, просить поменять прошивку мк я не осмелюсь, самостоятельно допишу. Вопрос в том как бы получше сделать чтобы это все было совместимо с вашей управляющей программой на компьютере, да и вообще, если есть комментарии по тому что я написал
Я немного писал в теме про принтер , который переделываю. В общем хотел по максимуму использовать то что в нем находится, поэтому разобрался с родной платой управления. Там используется многоканальный драйвер двигателей, в моем случае задействованы 3 канала из 4, плюс в драйвер встроены импульсные понижающие стабилизаторы (3шт), которые можно настроить внешними делителями на произвольное напряжение. Сам драйвер запитан напряжением 32В и в принтере формирует напряжения питания 1.8 3.3 и 5В. Для управления каждым из двигателей используется два сигнала - EN, PHASE , причем шим можно осуществлять только по входу PHASE, вход EN низкоскоростной, поэтому сигналу шим 50% соответствует нулевой ток через двигатель , 0% и 100% соответствуют -V и +V на двигателе. Кроме того в момент включения питания драйвер должен быть проинициализирован - задается режим его работы, включаются стабилизаторы и нужные выходы. Эта инициализация производится по входам PHASE первых двух двигателей , один из которых становится линией данных, второй - тактами. Еще есть глобальный вход драйвера, который его включает/выключает. В общей сложности в принтере нужно управлять двумя двигателями каждый из которых снабжен оптическим энкодером. Такая вот общая картина.
Теперь к вопросам
Информация по RLC mini находится >тут<
Забавно вышло, хотел в личку а оно вон какNeekeetos писал(а):да и вообще, если есть комментарии по тому что я написал
Информация по RLC mini находится >тут<

Очередная версия HLDI. В основном для тех, у кого проблемы изображения с камер.
Neekeetos Благое дело задумали. Проблем с совместимостью быть не должно. Для движения каретки или стола, прога передаёт контроллеру координаты конечной точки, а как достигнуть её, думает сам контроллер.
Совсем не обязательно, у меня и первый то не аппаратный - по прерываниям работает. Тут проблема в другом, одно дело стабилизировать скорость плюс минус лапоть, а другое дело точно остановить двигатель в нужном месте.Neekeetos писал(а):"...Видимо нужно подключать энкодеры к аппаратным входам таймеров.."
протестил последнюю сборку в части работы с камерами.
все камеры имеющиеся у меня и ранее работавшие криво,
РАБОТАЮТ правильно!, с любыми дровами! (и виндовыми и проприетарными)
итого 2 ноутбучные камеры, 2 вэбкамеры, микроскоп а-ля чайна, эндоскоп тоже китайский, все четко.
проверил на хп (в настройки вообще не лазил, правда вчера я туда ставил dotnet свежий, может повлияло)
на win7 тоже работает, НО, пришлось ввыбирать режим 640х480, а затем закрывать камеру, и только на четвертое включение заработало как надо
Спасибо!!!
все камеры имеющиеся у меня и ранее работавшие криво,
РАБОТАЮТ правильно!, с любыми дровами! (и виндовыми и проприетарными)
итого 2 ноутбучные камеры, 2 вэбкамеры, микроскоп а-ля чайна, эндоскоп тоже китайский, все четко.
проверил на хп (в настройки вообще не лазил, правда вчера я туда ставил dotnet свежий, может повлияло)
на win7 тоже работает, НО, пришлось ввыбирать режим 640х480, а затем закрывать камеру, и только на четвертое включение заработало как надо
Спасибо!!!

Да. А если бы я потерпел пару деньков, то logitech c310 была бы жива. 
Ну чтож, это здорово, буду делатьAlphaCrow писал(а):Проблем с совместимостью быть не должно. Для движения каретки или стола, прога передаёт контроллеру координаты конечной точки, а как достигнуть её, думает сам контроллер.
Как раз об этом и хотел сказать. Дело в том что у вас в прошивке регулирование двигателя происходит тоже по прерываниям, а частота прерываний не постоянна. Для нормальной работы такого пид регулятора требуется набор коэффициентов на каждую скорость, поскольку динамические параметры системы постоянны но усиление петли регулирования меняется и зависит от частоты. Нормально было бы сделать аппаратный счетчик позиции энкодера и считывание его с фиксированной частотой, тогда и регулировка скорости и задание позиции проблемы не будут представлять. Конечно для этого придется придумать как привязать модулятор лазера к текущей позиции каретки.AlphaCrow писал(а):Совсем не обязательно, у меня и первый то не аппаратный - по прерываниям работает. Тут проблема в другом, одно дело стабилизировать скорость плюс минус лапоть, а другое дело точно остановить двигатель в нужном месте.
Информация по RLC mini находится >тут<
Вчера на гиктаймс тема появилась с похожим проектом Лазерный гравировщик на основе деталей CD-ROM приводов и Arduino mega
Но, как мне показалось, наш печатает значительно лучше, ну о размерах рабочего поля умолчу...
Но, как мне показалось, наш печатает значительно лучше, ну о размерах рабочего поля умолчу...
У кого ни будь кто собрал установку, есть лента на 720 dpi? Как с ней работает? Вопрос к AlphaCrow, справится ли контроллер если поставить магнитную ленту и датчик с физическим разрешением где то в 1200 dpi? То есть на установке получиться 4800 dpi. Просто есть вроде возможность достать такую штуку, но если не справиться, то тогда не стоит и суетиться...
Прототипы печатных плат на заказ https://radiokot.ru/forum/viewtopic.php?f=54&t=122701

А куда ему деться то?mial писал(а):справится ли контроллер если поставить магнитную ленту и датчик с физическим разрешением где то в 1200 dpi?
Кстати, если такая штука вполне доставаема за вменяемые деньги, то я бы подписался на комплект.
Пы.Сы: в порядке бреда можно попробовать заюзать ленту с меньшим разрешением, но с аналоговым энкодером. Импульсы формировать отдельной схемой с шустрыми компараторами, разместив схему прям на башке во избежание помех. По крайней мере точность прицеливания по реперу будет значительно выше, нежели сейчас.
Прибор, защищённый предохранителем, сгорает первым, защитив предохранитель. Закон Мерфи.