В том-то и фишка, что на работе нет интернета. Есть только по проводам корпоративный на одном единственном компе. Тырнет есть в поезде, но мы переселились и на новое место уже приходится ездить не комфортными дизель-поездами, а простой электричкой, где уже не поработаешь особо. А так как наша остановка теперь не конечная (и дизель-поезда там не останавливаются), то и сидячие места, увы, пол-дороги недоступны. Хотя батарейки в нетбуке как раз на пол-дороги и хватает. Если, конечно, есть какая идея.
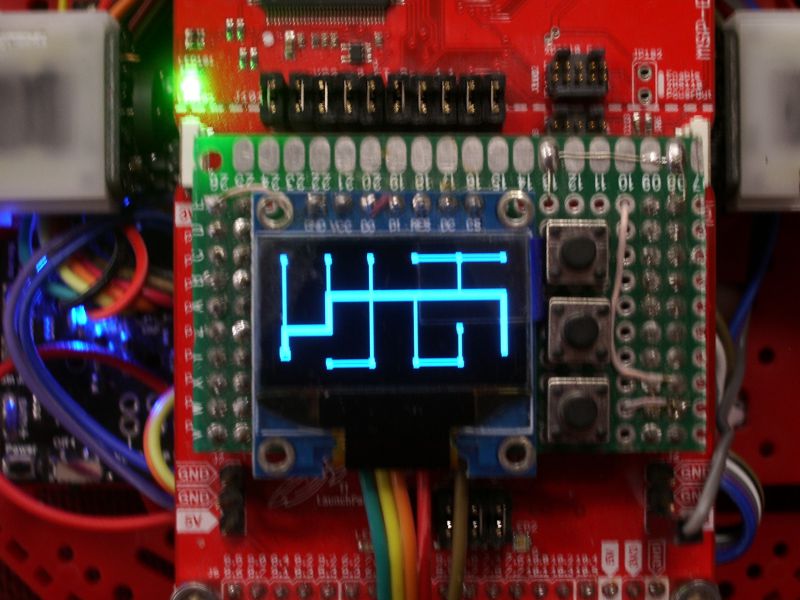
Сейчас идей особо нет - так вылизываю программу: добавляю всевозможные проверки. Сделал так, что если робот начинает бесконтрольно вращаться (не может найти линию по причине того, что ускакал с трассы и считает, что разворачивается в тупике), то сделав оборот программа останавливается и робот сообщает, что он заблудился. Так же, решил контролировать, когда робот идёт по уже однажды пройденному коридору, т.е. знает номер узла куда должет придти, пришел ли туда, куда надо или нет. Если нет, то снова аборт задачи.
Возможно, нашел причину нестабильности прохождения робота. Не инициализировалась одна переменная в функции, когда робот идёт по коридору (голосом Копеляна: Штирлиц шёл по коридору). Хотя, она через 2.5мс получает корректное значение, но тем не менее... Еще не проверил, так как весь вечер заряжал последнюю пару батареек.
Пока вчера на работе колупался, пришла в голову мысль, а не поставить ли андроида на Raspberry Pi - есть у меня одна платка, взял на попробовать. Потыкался в интернете и стало печально. Теоретическая возможность есть, но гарантий никаких. Еще и для инсталляции Play Market нужен *никсоподобный шелл, т.е. надо иметь что-то линуксовое или на машине, или на виртуальной машине.
Ничего, понедельник будет выходной день, будет 3 дня на позаниматься.
Попробовал соединиться CySmart - ошибка "Exchange GATT MTU Size timed out". Правда, еще подумал, что надо бы подключить cc2650. Скопировал файлы, подключил, но что-то не работает - адвертисмент есть, характеристики вижу, но ни запись, ни чтение не идут что-то.
Сейчас идей особо нет - так вылизываю программу: добавляю всевозможные проверки. Сделал так, что если робот начинает бесконтрольно вращаться (не может найти линию по причине того, что ускакал с трассы и считает, что разворачивается в тупике), то сделав оборот программа останавливается и робот сообщает, что он заблудился. Так же, решил контролировать, когда робот идёт по уже однажды пройденному коридору, т.е. знает номер узла куда должет придти, пришел ли туда, куда надо или нет. Если нет, то снова аборт задачи.
Возможно, нашел причину нестабильности прохождения робота. Не инициализировалась одна переменная в функции, когда робот идёт по коридору (голосом Копеляна: Штирлиц шёл по коридору). Хотя, она через 2.5мс получает корректное значение, но тем не менее... Еще не проверил, так как весь вечер заряжал последнюю пару батареек.
Пока вчера на работе колупался, пришла в голову мысль, а не поставить ли андроида на Raspberry Pi - есть у меня одна платка, взял на попробовать. Потыкался в интернете и стало печально. Теоретическая возможность есть, но гарантий никаких. Еще и для инсталляции Play Market нужен *никсоподобный шелл, т.е. надо иметь что-то линуксовое или на машине, или на виртуальной машине.
Ничего, понедельник будет выходной день, будет 3 дня на позаниматься.
Попробовал соединиться CySmart - ошибка "Exchange GATT MTU Size timed out". Правда, еще подумал, что надо бы подключить cc2650. Скопировал файлы, подключил, но что-то не работает - адвертисмент есть, характеристики вижу, но ни запись, ни чтение не идут что-то.
А люди посмотрят и скажут: "Собаки летят. Вот и осень."