Писал-писал, пытался интегрировать стоимость поворота и прохода узла... наделал кучу if-ов и понял, что из изящного алгоритма скатываюсь в неизвестно что. Поэтому, всё удалил и сделал еще одну процедуру - "расслоение карты". Т.е. каждый узел разделил на два, соединил их ребром стоимостью поворота и приделал к четным узлам меридианальное направление, а к нечетным - широтные. Можно было бы еще и по этой карте пройтись с удалением тупиков, но было лень - алгоритм и так работает.
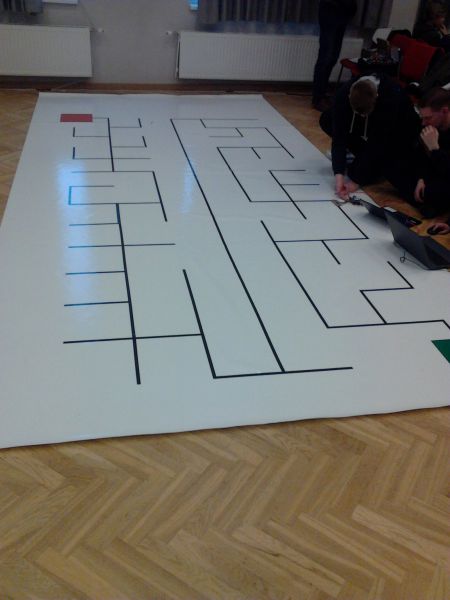
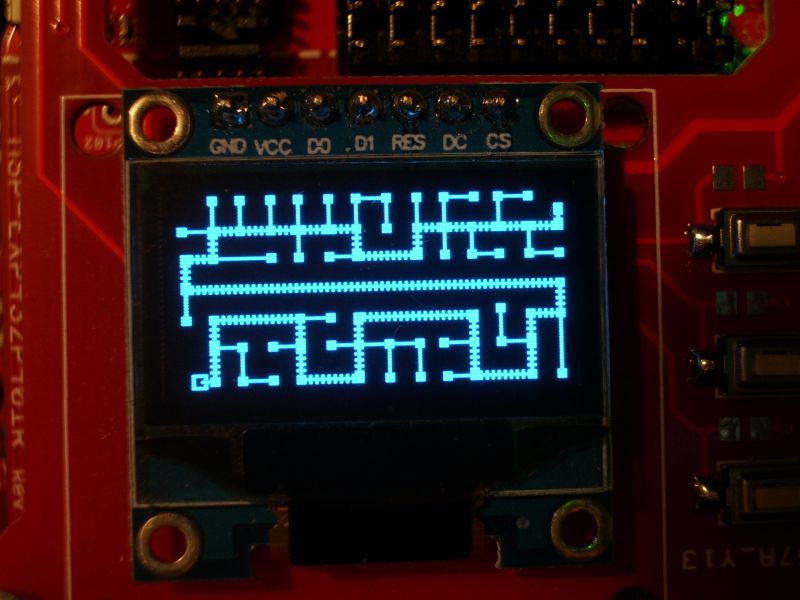
Для проверки, подумал, что если я задам стоимость поворота равной нулю, то должен получить предыдущий результат. Правда, тут я испугался. Если у меня четные-нечетные узлы все связаны нулевым ребром, то алгоритм генерирования пути может взять и там зациклиться, ведь 0 всегда 0. Но, я в структуре данных сделал так, что этот вариант проверяется последним. Т.е. пришли мы в узел 46 (четный - значит меридианальный и пришли мы в него с юга). Проверяем путь на север (там ничего нет), юг (мы оттуда пришли и там высота больше текущей) и раз уж ничего не осталось делаем "поворот" - переход на ячейку 47 (нечетную - широтного направления). И уже там снова проверяем восточное направление и западное. До третьей позиции нам надо уже уйти дальше (обычно так и происходит), иначе мы зациклимся - вернёмся на 46-ю ячейку. В общем, прошелся под отладчиком, пока ошибок не нашел. Сделал тестовый запуск - получил предыдущий результат. Тогда решил немного задрать стоимость прохода через узел и стоимость поворота. Хм, получился другой маршрут:
Всего на 2 клеточки длиннее предыдущего, но поворотов на 4 меньше, так что робот потратит времени тоже меньше.
А! Стоимость прохода через узел я просто приплюсовываю к длине примыкающего к узлу ребра.
Для проверки, подумал, что если я задам стоимость поворота равной нулю, то должен получить предыдущий результат. Правда, тут я испугался. Если у меня четные-нечетные узлы все связаны нулевым ребром, то алгоритм генерирования пути может взять и там зациклиться, ведь 0 всегда 0. Но, я в структуре данных сделал так, что этот вариант проверяется последним. Т.е. пришли мы в узел 46 (четный - значит меридианальный и пришли мы в него с юга). Проверяем путь на север (там ничего нет), юг (мы оттуда пришли и там высота больше текущей) и раз уж ничего не осталось делаем "поворот" - переход на ячейку 47 (нечетную - широтного направления). И уже там снова проверяем восточное направление и западное. До третьей позиции нам надо уже уйти дальше (обычно так и происходит), иначе мы зациклимся - вернёмся на 46-ю ячейку. В общем, прошелся под отладчиком, пока ошибок не нашел. Сделал тестовый запуск - получил предыдущий результат. Тогда решил немного задрать стоимость прохода через узел и стоимость поворота. Хм, получился другой маршрут:
Всего на 2 клеточки длиннее предыдущего, но поворотов на 4 меньше, так что робот потратит времени тоже меньше.
А! Стоимость прохода через узел я просто приплюсовываю к длине примыкающего к узлу ребра.
А люди посмотрят и скажут: "Собаки летят. Вот и осень."