Да ничего суперского я там не придумал. BGM13, SPI дисплей и 3 кнопки. Для программирования вывел JTAG, и еще, все оставшиеся выводы BGM вывел дорожками на пады, чтобы если позже что еще взбредёт в голову, можно было подпаяться проводками. Ну и еще на плате развёл SEPIC преобразователь на MCP1661.
Уже не помню, писал или нет, возникла мысль сделать робота на PSoC в конструктиве "старого" робота. Вот сейчас сижу, пытаюсь развести плату. Правда, драйвер двигателей собираюсь ставить такой же как у "старого" - TB6612. И если останется место, попробую вместить BGM.
А вот кстати, вопрос на засыпку. У JTAG интерфейсов TDI - TDO можно сцепить цепочкой. Я такой фокус применял с зайлинксовыми CPLD. Там у меня на одной плате стояло 3 штуки xc2c64a и через один разъём я мог достучаться до любого из трёх и прошить им конфигурацию. А как на такой фокус отреагируют Simplicity Studio и PSoC Creator, если я в одну цепочку сцеплю PSoC и BGM? Кто-нибудь это пробовал? Просто у этих софтов, я не видел в меню такой штуки как Boundary Scan, которая была в ISE iMPACT.Это в расшифрованном виде. Проезд перекрёстка. Может, реальные показания всех восьми сенсоров мне не нужно, но вычисленное значение ошибки хотел бы (это еще 16 бит). Потом показания заданной и реальной скорости, показание пройденного пути, номер сегмента по которому иду и, может еще чего-нибудь. Другая проблема, писать в plain text или кодированными блоками. Во втором случае, надо где-то разместить инструмент для его декодирования и визуализации (ну хотя бы в электронную таблицу загрузить).
Уже не помню, писал или нет, возникла мысль сделать робота на PSoC в конструктиве "старого" робота. Вот сейчас сижу, пытаюсь развести плату. Правда, драйвер двигателей собираюсь ставить такой же как у "старого" - TB6612. И если останется место, попробую вместить BGM.
А вот кстати, вопрос на засыпку. У JTAG интерфейсов TDI - TDO можно сцепить цепочкой. Я такой фокус применял с зайлинксовыми CPLD. Там у меня на одной плате стояло 3 штуки xc2c64a и через один разъём я мог достучаться до любого из трёх и прошить им конфигурацию. А как на такой фокус отреагируют Simplicity Studio и PSoC Creator, если я в одну цепочку сцеплю PSoC и BGM? Кто-нибудь это пробовал? Просто у этих софтов, я не видел в меню такой штуки как Boundary Scan, которая была в ISE iMPACT.
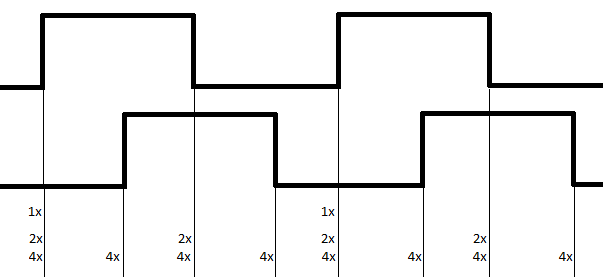
Если бы я знал! Хочу всего и побольше. То, журналирование, что был сделавши на 24c512, где на один фрейм писался всего один байт (1000 фреймов в секунду), мне маловато. И даже на этих соревнованиях я эту информацию не собирал. Там я вижу только грубую картинку, что видят фото сенсоры:Ser60 писал(а):Насчёт SDIO
Спойлер
Код: Выделить всё
08.738,...##...
08.739,...##...
08.740,...##...
08.741,...##...
08.742,...##...
08.743,...##...
08.744,...##...
08.745,...##...
08.746,...##...
08.747,..####..
08.748,.#####..
08.749,#######.
08.750,#######.
08.751,########
08.752,########
08.753,########
08.754,########
08.755,########
08.756,########
08.757,########
08.758,##.#####
08.759,#..##.##
08.760,#..##..#
08.761,...##..#
08.762,...##...
08.763,...##...
08.764,...##...
08.765,...##...
08.766,...##...
08.767,...##...
08.768,...##...А люди посмотрят и скажут: "Собаки летят. Вот и осень."