 |
 |
||||||||||||
–Ý–∞–∑—Ä–∞–±–æ—Ç–∫–∞ Bluetooth –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–π –Ω–∞ –º–æ–¥—É–ª—è—Ö —Ñ–∏—Ä–º—ã Silicon Labs. –ß–∞—Å—Ç—å III.
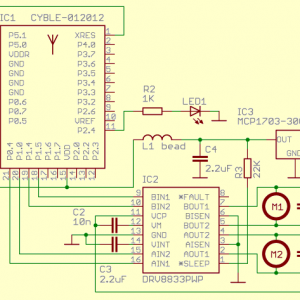
–ê–≤—Ç–æ—Ä: –°–µ—Ä–≥–µ–π –ë–µ–∑—Ä—É–∫–æ–≤ (aka Ser60) –í —ç—Ç–æ–π —á–∞—Å—Ç–∏ —Å—Ç–∞—Ç—å–∏ –±—É–¥–µ—Ç —Ä–∞—Å—Å–∫–∞–∑–∞–Ω–æ –∫–∞–∫ —Ä–∞–∑—Ä–∞–±–æ—Ç–∞—Ç—å Bluetooth –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–µ –ø–æ–¥ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ–º Micriµm OS –∏ –ø–æ—Ä—Ç–∏—Ä–æ–≤–∞—Ç—å –ø—Ä–æ–µ–∫—Ç –Ω–∞ –æ—Ç–¥–µ–ª—å–Ω—ã–π –≤–Ω–µ—à–Ω–∏–π Bluetooth –º–æ–¥—É–ª—å. –î–ª—è –ø–µ—Ä–≤–∏—á–Ω–æ–≥–æ –æ–∑–Ω–∞–∫–æ–º–ª–µ–Ω–∏—è —Å Micriµm OS —Ä–µ–∫–æ–º–µ–Ω–¥—É—é –ø—Ä–æ—á–∏—Ç–∞—Ç—å —Å—Ç–∞—Ç—å—é [1]. –Ý–∞–∑—Ä–∞–±–æ—Ç–∫–∞ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è –Ω–∞ –¥–µ–º–æ-–ø–ª–∞—Ç–µ –ü–µ—Ä–≤–æ–Ω–∞—á–∞–ª—å–Ω—É—é —Ä–∞–∑—Ä–∞–±–æ—Ç–∫—É –±—É–¥–µ–º –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—å –Ω–∞ —Ç–∞–∫–æ–π-–∂–µ –æ—Ç–ª–∞–¥–æ—á–Ω–æ–π –ø–ª–∞—Ç–µ, —á—Ç–æ –∏ –≤ –ø–µ—Ä–≤–æ–π —á–∞—Å—Ç–∏ —Å—Ç–∞—Ç—å–∏ [2], –∏–º–µ–Ω–Ω–æ Wireless Starter Kit Mainboard (BRD4001A) —Å —É—Å—Ç–∞–Ω–æ–≤–ª–µ–Ω–Ω–æ–π –Ω–∞ –Ω–µ–π –ø–ª–∞—Ç–æ–π BRD4306A —Å –º–æ–¥—É–ª–µ–º BGM13P22. –í –∫–∞—á–µ—Å—Ç–≤–µ —Å—Ä–µ–¥—ã —Ä–∞–∑—Ä–∞–±–æ—Ç–∫–∏ –∏—Å–ø–æ–ª—å–∑—É–µ–º Simplicity Studio –∏ –≤–µ—Ä—Å–∏—é SDK 6.2.4. –ù–∞—à–µ–π —Ü–µ–ª—å—é, –∫–∞–∫ –∏ —Ä–∞–Ω–µ–µ, —è–≤–ª—è–µ—Ç—Å—è —Å–æ–∑–¥–∞–Ω–∏–µ —Å–µ—Ä–≤–µ—Ä–∞ —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—ã –∏ –≤–ª–∞–∂–Ω–æ—Å—Ç–∏, –∫–æ—Ç–æ—Ä—ã–π –±—É–¥–µ—Ç –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—å –∏–∑–º–µ—Ä–µ–Ω–∏–µ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—â–∏—Ö –ø–∞—Ä–∞–º–µ—Ç—Ä–æ–≤ —Å—Ä–µ–¥—ã –∏ –æ—Ç—Å—ã–ª–∞—Ç—å –∏—Ö –∫–ª–∏–µ–Ω—Ç—É (—Å–º–∞—Ä—Ç—Ñ–æ–Ω) –ª–∏–±–æ –∫–∞–∂–¥—ã–π —Ä–∞–∑ –ø–æ –µ–≥–æ –∑–∞–ø—Ä–æ—Å—É, –ª–∏–±–æ –ø–µ—Ä–∏–æ–¥–∏—á–µ—Å–∫–∏ —Ä–∞–∑ –≤ —Å–µ–∫—É–Ω–¥—É. –ü—Ä–µ–∂–¥–µ –≤—Å–µ–≥–æ –æ—Ç–º–µ—á—É, —á—Ç–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏–µ RTOS –¥–ª—è —Ç–∞–∫–æ–≥–æ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è –Ω–µ —è–≤–ª—è–µ—Ç—Å—è —Å–∞–º–æ—Ü–µ–ª—å—é. –í —Å–ª—É—á–∞—è—Ö, –∫–æ–≥–¥–∞ —Ñ—É–Ω–∫—Ü–∏–æ–Ω–∞–ª Bluetooth –∂–µ–ª–∞—Ç–µ–ª—å–Ω–æ –¥–æ–±–∞–≤–∏—Ç—å –≤ —É–∂–µ —Ä–∞–∑—Ä–∞–±–æ—Ç–∞–Ω–Ω–æ–µ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–µ –¥–ª—è –ú–ö, –º–æ–≥—É—Ç –≤–æ–∑–Ω–∏–∫–Ω—É—Ç—å –æ–ø—Ä–µ–¥–µ–ª—ë–Ω–Ω—ã–µ —Å–ª–æ–∂–Ω–æ—Å—Ç–∏. –ü—Ä–æ–±–ª–µ–º–∞ —Å–æ—Å—Ç–æ–∏—Ç –≤ —Å–∏–Ω—Ö—Ä–æ–Ω–∏–∑–∞—Ü–∏–∏ —Ä–∞–±–æ—Ç—ã –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è –∏ —Å—Ç–µ–∫–∞ Bluetooth, –æ—Å–æ–±–µ–Ω–Ω–æ –ø—Ä–∏ —É—Å–ª–æ–≤–∏–∏ —Ä–∞–±–æ—Ç—ã –æ–±–æ–∏—Ö –≤ –∂—ë—Å—Ç–∫–∏—Ö –≤—Ä–µ–º–µ–Ω–Ω—ã—Ö —Ä–∞–º–∫–∞—Ö. –ù–µ—Å–∫–æ–ª—å–∫–æ —Å–ø–æ—Å–æ–±–æ–≤ –∏–Ω—Ç–µ–≥—Ä–∞—Ü–∏–∏ —Å—Ç–µ–∫–∞ Bluetooth –≤ –∏–º–µ—é—â–µ–µ—Å—è –ø—Ä–∏–ª–æ–∂–µ–Ω–∏e –ø—É—Ç—ë–º –æ–±—ä–µ–¥–∏–Ω–µ–Ω–∏—è –∏—Ö –≥–ª–∞–≤–Ω—ã—Ö —Ü–∏–∫–ª–æ–≤ –æ–ø–∏—Å–∞–Ω—ã –≤ —Å—Ç–∞—Ç—å–µ [3]. –í–æ–∑–º–æ–∂–Ω—ã–º–∏ —Ä–µ—à–µ–Ω–∏—è–º–∏ —è–≤–ª—è—é—Ç—Å—è –≤—ã–∑–æ–≤ —Ñ—É–Ω–∫—Ü–∏–æ–Ω–∞–ª–∞ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è –∏–∑ –≥–ª–∞–≤–Ω–æ–≥–æ —Ü–∏–∫–ª–∞ –æ–±—Ä–∞–±–æ—Ç–∫–∏ —Å–æ–±—ã—Ç–∏–π Bluetooth –∏–ª–∏ –Ω–∞–æ–±–æ—Ä–æ—Ç – –ø—Ä–æ–≤–µ—Ä–∫–∞ –Ω–∞–ª–∏—á–∏—è –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ—Å—Ç–∏ –æ–±—Ä–∞–±–æ—Ç–∫–∏ —Å–æ–±—ã—Ç–∏–π Bluetooth –≤ –≥–ª–∞–≤–Ω–æ–º —Ü–∏–∫–ª–µ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è. –î–ª—è –ø—Ä–æ—Å—Ç—ã—Ö –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–π —Ç–∏–ø–∞ –Ω–∞—à–µ–≥–æ —ç—Ç–æ–≥–æ –º–æ–∂–µ—Ç –±—ã—Ç—å –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ. –û–¥–Ω–∞–∫–æ, –≤ –±–æ–ª–µ–µ —Å–ª–æ–∂–Ω—ã—Ö —Å–ª—É—á–∞—è—Ö —Å–æ–≤—Ä–µ–º–µ–Ω–Ω–∞—è —Ç–µ–Ω–¥–µ–Ω—Ü–∏—è —Ä–∞–∑—Ä–∞–±–æ—Ç–∫–∏ –ü–û –ø–æ–¥—Ä–∞–∑—É–º–µ–≤–∞–µ—Ç –ø—Ä–æ–µ–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–π –ø–æ–¥ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ–º RTOS. –í–æ—Ç —Ç–æ–≥–¥–∞ –∏ –≤–æ–∑–Ω–∏–∫–Ω–µ—Ç –≤–æ–ø—Ä–æ—Å –∫–∞–∫ –ø–µ—Ä–µ–≤–µ—Å—Ç–∏ —Ä–∞–±–æ—Ç—É —Å—Ç–µ–∫–∞ Bluetooth –ø–æ–¥ –∫–æ–Ω—Ç—Ä–æ–ª—å RTOS. –ü–æ—Å—Ç–∞–≤–ª–µ–Ω–Ω–æ–π –ø—Ä–æ–±–ª–µ–º–µ –ø–æ—Å–≤—è—â–µ–Ω–∞ —Å—Ç–∞—Ç—å—è [4], –≥–¥–µ —Ä–∞–±–æ—Ç–∞ —Å—Ç–µ–∫–∞ Bluetooth —Ä–∞–∑–±–∏—Ç–∞ –Ω–∞ 3 –ø–æ—Ç–æ–∫–∞. –ü–æ—Ç–æ–∫ Link Layer (LL task) –ø—Ä–µ–¥–Ω–∞–∑–Ω–∞—á–µ–Ω –¥–ª—è —Ä–µ–∞–∫—Ü–∏–∏ –Ω–∞ —Å–æ–±—ã—Ç–∏—è, –≥–µ–Ω–µ—Ä–∏—Ä—É–µ–º—ã—Ö —Ä–∞–¥–∏–æ-—Ç—Ä–∞–∫—Ç–æ–º. –ü–æ—Ç–æ–∫ Bluetooth Host Task –Ω–µ–ø–æ—Å—Ä–µ–¥—Å—Ç–≤–µ–Ω–Ω–æ –≤–∑–∞–∏–º–æ–¥–µ–π—Å—Ç–≤—É–µ—Ç —Å–æ —Å—Ç–µ–∫–æ–º Bluetooth, –ø–æ—Å—ã–ª–∞—è –≤ –Ω–µ–≥–æ –Ω–∞–¥–ª–µ–∂–∞—â–∏–µ –∫–æ–º–∞–Ω–¥—ã. –≠—Ç–æ—Ç-–∂–µ –ø–æ—Ç–æ–∫ –æ—Ç–≤–µ—á–∞–µ—Ç –∑–∞ –≥–µ–Ω–µ—Ä–∞—Ü–∏—é —Å–æ–±—ã—Ç–∏–π Bluetooth, –æ–±—Ä–∞–±–æ—Ç–∫–∞ –∫–æ—Ç–æ—Ä—ã—Ö –≤–æ–∑–ª–æ–∂–µ–Ω–∞ –Ω–∞ –ø–æ—Ç–æ–∫ Application Task. –í –∫–æ–¥ –ø–µ—Ä–≤—ã—Ö –¥–≤—É—Ö –ø–æ—Ç–æ–∫–æ–≤ –º–æ–∂–Ω–æ –Ω–µ –≤–Ω–∏–∫–∞—Ç—å –∏ –º—ã –µ–≥–æ –∏–∑–º–µ–Ω—è—Ç—å –Ω–µ –±—É–¥–µ–º. –ù–∞–∑–≤–∞–Ω–∏–µ –ø–æ—Å–ª–µ–¥–Ω–µ–≥–æ –ø–æ—Ç–æ–∫–∞ Application Task, –Ω–∞ –º–æ–π –≤–∑–≥–ª—è–¥, –Ω–µ —Å–æ–≤—Å–µ–º —É–¥–∞—á–Ω–æ–µ, —Ç.–∫. –º–æ–∂–µ—Ç —Å–æ–∑–¥–∞—Å—Ç—Å—è –≤–ø–µ—á–∞—Ç–ª–µ–Ω–∏–µ, —á—Ç–æ —ç—Ç–æ—Ç –ø–æ—Ç–æ–∫ –∑–∞–Ω–∏–º–∞–µ—Ç—Å—è —Å—Ç–æ—Ä–æ–Ω–Ω–∏–º–∏ –¥–ª—è Bluetooth –≤—ã—á–∏—Å–ª–µ–Ω–∏—è–º–∏, —Å–≤—è–∑–∞–Ω–Ω—ã–º–∏ —Å –æ—Å—Ç–∞–ª—å–Ω–æ–π –ª–æ–≥–∏–∫–æ–π –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª—è. –ù–∞ —Å–∞–º–æ–º –¥–µ–ª–µ, –æ—Å–Ω–æ–≤–Ω–æ–π —Ñ—É–Ω–∫—Ü–∏–µ–π —ç—Ç–æ–≥–æ –ø–æ—Ç–æ–∫–∞ —è–≤–ª—è–µ—Ç—Å—è —Ä–µ–∞–∫—Ü–∏—è –Ω–∞ —Å–æ–±—ã—Ç–∏—è —Å—Ç–µ–∫–∞ Bluetooth, –∫–æ—Ç–æ—Ä–∞—è, –≤ —Å–≤–æ—é –æ—á–µ—Ä–µ–¥—å, –Ω–∞—Ö–æ–¥–∏—Ç—Å—è –≤ —Å–∏–ª—å–Ω–æ–π –∑–∞–≤–∏—Å–∏–º–æ—Å—Ç–∏ –æ—Ç –Ω—É–∂–¥ –æ—Å—Ç–∞–ª—å–Ω–æ–π —á–∞—Å—Ç–∏ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è. –í –ø—Ä–∏–ª–∞–≥–∞–µ–º–æ–º –∫–æ–¥–µ —è –Ω–∞–∑–≤–∞–ª —ç—Ç–æ—Ç –ø–æ—Ç–æ–∫ BluetoothAppTask. –í–∑–∞–∏–º–æ–¥–µ–π—Å—Ç–≤–∏–µ –ø–æ–∫–∞–∑–∞–Ω–Ω—ã—Ö –ø–æ—Ç–æ–∫–æ–≤ —É–ø—Ä–∞–≤–ª—è–µ—Ç—Å—è —Å–µ–º–∞—Ñ–æ—Ä–∞–º–∏ –∏ —Ñ–ª–∞–≥–∞–º–∏ RTOS, –ø–æ–¥—Ä–æ–±–Ω–µ–µ –æ–± —ç—Ç–æ–º –Ω–∞–ø–∏—Å–∞–Ω–æ –≤ [4]. –ù–∞—Ä—è–¥—É —Å —ç—Ç–∏–º–∏ –ø–æ—Ç–æ–∫–∞–º–∏ –¥–ª—è —Ñ—É–Ω–∫—Ü–∏–æ–Ω–∏—Ä–æ–≤–∞–Ω–∏—è Bluetooth —É –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è –º–æ–≥—É—Ç –±—ã—Ç—å –∏ —Å–≤–æ–∏ —Å–æ–±—Å—Ç–≤–µ–Ω–Ω—ã–µ –¥—Ä—É–≥–∏–µ –ø–æ—Ç–æ–∫–∏. –° –ø—Ä–∞–∫—Ç–∏—á–µ—Å–∫–æ–π —Ç–æ—á–∫–∏ –∑—Ä–µ–Ω–∏—è, –≤ —Å–ø–∏—Å–∫–µ –ø—Ä–∏–º–µ—Ä–æ–≤ –≤ Studio –∏–º–µ–µ—Ç—Å—è –¥–µ–º–æ–Ω—Å—Ç—Ä–∞—Ü–∏–æ–Ω–Ω—ã–π –ø—Ä–æ–µ–∫—Ç SOC-Thermometer-RTOS, –∫–æ—Ç–æ—Ä—ã–π —è –∏ –≤–∑—è–ª –∑–∞ –æ—Å–Ω–æ–≤—É –∏ –∞–¥–∞–ø—Ç–∏—Ä–æ–≤–∞–ª –¥–ª—è –Ω–∞—à–µ–≥–æ —Å–ª—É—á–∞—è. –î–ª—è –º–æ–¥–∏—Ñ–∏–∫–∞—Ü–∏–∏ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ –ª–∏—à—å –∏–∑–º–µ–Ω–∏—Ç—å –∫–æ–¥ –≤ —Ñ–∞–π–ª–µ main.c –ø—Ä–∏–ª–∞–≥–∞–µ–º–æ–≥–æ –≤ –∞—Ä—Ö–∏–≤–µ –ø—Ä–æ–µ–∫—Ç–∞ Server_RTOS. –ü—Ä–µ–∂–¥–µ –≤—Å–µ–≥–æ —Å–ª–µ–¥—É–µ—Ç –Ω–∞—Å—Ç—Ä–æ–∏—Ç—å RTOS –∏ –æ–ø—Ä–µ–¥–µ–ª–∏—Ç—å –∫–∞–∫–∏–µ —Å–ª—É–∂–µ–±–Ω—ã–µ –ø–æ—Ç–æ–∫–∏ —Ä–∞–∑—Ä–µ—à–∏—Ç—å. –≠—Ç–æ –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è –≤ –¥–µ—Ñ–∞–π–Ω–∞—Ö –ø–æ—Ç–æ–∫–æ–≤ –≤ —Ñ–∞–π–ª–µ main.h, –æ–±—ä–µ–¥–∏–Ω—è–µ–º—ã—Ö –≤ –∫–æ–Ω—Ü–µ –∫–æ–Ω—Ü–æ–≤ –≤ –æ–¥–∏–Ω –æ–±—â–∏–π #define –≤ —Å—Ç—Ä–æ–∫–∞—Ö 90-98, –∫–æ—Ç–æ—Ä—ã–π, –≤ —Å–≤–æ—é –æ—á–µ—Ä–µ–¥—å, —Å–ª—É–∂–∏—Ç –¥–ª—è –æ–ø—Ä–µ–¥–µ–ª–µ–Ω–∏—è –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π OS_InitCfg –≤ —Ñ–∞–π–ª–µ main.c. –≠—Ç–∞ –ø–µ—Ä–µ–º–µ–Ω–Ω–∞—è –¥–æ–ª–∂–Ω–∞ –±—ã—Ç—å –∏–º–µ–Ω–Ω–æ —Ç–∞–∫ –Ω–∞–∑–≤–∞–Ω–∞ –¥–ª—è –Ω–∞–¥–ª–µ–∂–∞—â–µ–≥–æ –≤–æ—Å–ø—Ä–∏—è—Ç–∏—è –Ω–∞—Å—Ç—Ä–æ–µ–∫ —Å–∏—Å—Ç–µ–º–æ–π Micriµm OS. –ü–æ–¥—á–µ—Ä–∫–Ω—É, —á—Ç–æ –¥–ª—è –∫–æ–º–ø–∏–ª—è—Ü–∏–∏ —ç—Ç–æ–≥–æ –∫–æ–¥–∞ —Å—É—â–µ—Å—Ç–≤–µ–Ω–Ω–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏–µ –≤–µ—Ä—Å–∏–∏ SDK 6.x (—Ç–æ–π-–∂–µ, —á—Ç–æ –∏ –≤ –ø—Ä–µ–¥—ã–¥—É—â–∏—Ö —Å—Ç–∞—Ç—å—è—Ö —Ü–∏–∫–ª–∞), –ø–æ—Å–∫–æ–ª—å–∫–æ –≤ –ø–æ—Å–ª–µ–¥–Ω–µ–π –Ω–∞ –Ω–∞—Å—Ç–æ—è—â–∏–π –º–æ–º–µ–Ω—Ç –≤–µ—Ä—Å–∏–∏ 7 –ø—Ä–æ–∏–∑–≤–µ–¥–µ–Ω—ã –Ω–µ–∫–æ—Ç–æ—Ä—ã–µ –∏–∑–º–µ–Ω–µ–Ω–∏—è –∏ –∞–¥–∞–ø—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ –º–æ–∏—Ö —Å—Ç–∞—Ç–µ–π –Ω–∞ —ç—Ç—É –≤–µ—Ä—Å–∏—é SDK –∑–∞—Å–ª—É–∂–∏–≤–∞–µ—Ç –æ—Ç–¥–µ–ª—å–Ω–æ–≥–æ —Ä–∞—Å—Å–º–æ—Ç—Ä–µ–Ω–∏—è. –î–ª—è –Ω–∞—á–∞–ª–∞ —Ä–∞–±–æ—Ç—ã RTOS —Å–ª–µ–¥—É–µ—Ç —Å–æ–∑–¥–∞—Ç—å –∫–∞–∫ –º–∏–Ω–∏–º—É–º –æ–¥–∏–Ω –ø–æ—Ç–æ–∫ App_Task. –≠—Ç–æ –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è –≤ —Å—Ç—Ä–æ–∫–∞—Ö 138 – 151 —Ñ–∞–π–ª–∞ main.c –≤ –ø–æ–ª–Ω–æ–º —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–∏–∏ —Å [1]. –≠—Ç–æ—Ç –ø–æ—Ç–æ–∫ —è–≤–ª—è–µ—Ç—Å—è –≥–ª–∞–≤–Ω—ã–º –¥–ª—è –Ω–∞—à–µ–≥–æ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è, —Ä–∞—Å—Å–º–æ—Ç—Ä–∏–º –µ–≥–æ –ø–æ–¥—Ä–æ–±–Ω–µ–µ. –Ý–∞–±–æ—Ç–∞ –ø–æ—Ç–æ–∫–∞ –Ω–∞—á–∏–Ω–∞–µ—Ç—Å—è —Å –∫–æ–Ω—Ñ–∏–≥—É—Ä–∞—Ü–∏–∏ —Ç–∏–∫–æ–≤ OS (—Å—Ç—Ä–æ–∫–∞ 164) –∏ callback —Ñ—É–Ω–∫—Ü–∏–∏ –¥–ª—è –Ω—É–∂–¥ –¥–∏–Ω–∞–º–∏—á–µ—Å–∫–æ–≥–æ —Ç–∞–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏—è –∏ –ø–æ–≥—Ä—É–∂–µ–Ω–∏—è –ú–ö –≤ –≥–ª—É–±–æ–∫–∏–π —Å–æ–Ω –≤ —Å—Ç—Ä–æ–∫–µ 165, –ø–æ–¥—Ä–æ–±–Ω–µ–µ –ø—Ä–æ —ç—Ç–æ —Å–º. –≤ [1]. –î–∞–ª–µ–µ –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è —Å–æ–∑–¥–∞–Ω–∏–µ —Å–ø–µ—Ü–∏—Ñ–∏—á–Ω—ã—Ö –¥–ª—è Bluetooth –ø–æ—Ç–æ–∫–æ–≤ LL_Task –∏ Bluetooth_Host_Task –≤ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–∏–∏ —Å –≤—ã—à–µ–∏–∑–ª–æ–∂–µ–Ω–Ω—ã–º. –ö–æ–¥ —ç—Ç–∏—Ö –ø–æ—Ç–æ–∫–æ–≤ –≤—ã–Ω–µ—Å–µ–Ω –≤ –æ—Ç–¥–µ–ª—å–Ω—ã–π —Ñ–∞–π–ª rtos_bluetooth.c, –Ω–∞—Ö–æ–¥—è—â–∏–π—Å—è –≤ –ø–∞–ø–∫–µ protocol –ø—Ä–æ–µ–∫—Ç–∞, –∏ –º—ã –µ–≥–æ —Ç—Ä–æ–≥–∞—Ç—å –Ω–µ –±—É–¥–µ–º. –ü–æ—Å–ª–µ —ç—Ç–æ–≥–æ –ø–æ—Ç–æ–∫–æ–º –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è –∏–Ω–∏—Ü–∏–∞–ª–∏–∑–∞—Ü–∏—è hardware –Ω–∞ –ø–ª–∞—Ç–µ –∏ —Å–æ–∑–¥–∞–Ω–∏–µ —Ç—Ä–µ—Ç—å–µ–≥–æ, —Å–ø–µ—Ü–∏—Ñ–∏—á–Ω–æ–≥–æ –¥–ª—è Bluetooth, –ø–æ—Ç–æ–∫–∞ BluetoothAppTask, —Å –ø–æ–º–æ—â—å—é –∫–æ—Ç–æ—Ä–æ–≥–æ –±—É–¥–µ—Ç –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—å—Å—è —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ –Ω–∞—à–∏–º –≥–ª–∞–≤–Ω—ã–º –ø–æ—Ç–æ–∫–æ–º –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è –ø–æ—Å—Ä–µ–¥—Å—Ç–≤–æ–º —Ñ–ª–∞–≥–æ–≤ OS (—Å–º. [1]), —Å–æ–∑–¥–∞–Ω–Ω—ã—Ö –≤ —Å—Ç—Ä–æ–∫–µ 182. –ü–æ –∑–∞–≤–µ—Ä—à–µ–Ω–∏–∏ –æ–ø–∏—Å–∞–Ω–Ω–æ–π –∏–Ω–∏—Ü–∏–∞–ª–∏–∑–∞—Ü–∏–∏ –≥–ª–∞–≤–Ω—ã–π –ø–æ—Ç–æ–∫ –≤—Ö–æ–¥–∏—Ç –≤ –æ—Å–Ω–æ–≤–Ω–æ–π —Ü–∏–∫–ª. –Ý–∞–±–æ—Ç–∞ —Ü–∏–ª–∫–∞ –±–ª–æ–∫–∏—Ä—É–µ—Ç—Å—è OS —Ñ–ª–∞–≥–∞–º–∏ –≤ —Å—Ç—Ä–æ–∫–µ 201, –∫–æ—Ç–æ—Ä—ã–µ —É—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞—é—Ç—Å—è –ø–æ—Ç–æ–∫–æ–º BluetoothAppTask –≤ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–∏–∏ —Å —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ–º —Ä–∞–±–æ—Ç–æ–π —Å–µ—Ä–≤–µ—Ä–∞ —Å–æ —Å–º–∞—Ä—Ç—Ñ–æ–Ω–∞ (–æ–± —ç—Ç–æ–º –Ω–∏–∂–µ). –í—Å–µ–≥–æ –∏–º–µ–µ—Ç—Å—è 3 —Ñ–ª–∞–≥–∞, —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—â–∏—Ö –±–∏—Ç–∞–º 0 – 2 —Ñ–ª–∞–≥–æ–≤–æ–π –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π flags. –ï—Å–ª–∏ –Ω–µ –æ–¥–∏–Ω –∏–∑ —Ñ–ª–∞–≥–æ–≤ –Ω–µ –≤—ã—Å—Ç–∞–≤–ª–µ–Ω, –ø–ª–∞–Ω–∏—Ä–æ–≤—â–∏–∫ –û–° –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç –ø–µ—Ä–µ–∫–ª—é—á–µ–Ω–∏–µ –Ω–∞ –¥—Ä—É–≥–æ–π –ø–æ—Ç–æ–∫ –∏–ª–∏ Idle_Task, –∫–æ—Ç–æ—Ä—ã–π –≤ —Å–≤–æ—é –æ—á–µ—Ä–µ–¥—å, –ø–µ—Ä–µ–≤–æ–¥–∏—Ç –ú–ö –≤ –≥–ª—É–±–æ–∫–∏–π —Å–æ–Ω –ø–æ—Å—Ä–µ–¥—Å—Ç–≤–æ–º —Å–≤–æ–µ–π callback —Ñ—É–Ω–∫—Ü–∏–∏. –ï—Å–ª–∏ –±–∏—Ç 1 –∏–ª–∏ 2 —Ñ–ª–∞–≥–∞ –≤—ã—Å—Ç–∞–≤–ª–µ–Ω, –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è –∏–∑–º–µ—Ä–µ–Ω–∏–µ –ø–∞—Ä–∞–º–µ—Ç—Ä–æ–≤ —Å—Ä–µ–¥—ã –≤ —Å—Ç—Ä–æ–∫–∞—Ö 203 – 204, —Å–æ—Ö—Ä–∞–Ω–µ–Ω–∏–µ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—â–µ–≥–æ –ø–∞—Ä–∞–º–µ—Ç—Ä–∞ –≤ –±–∞–∑–µ –¥–∞–Ω–Ω—ã—Ö —Å–µ—Ä–≤–µ—Ä–∞, –∏ –æ—Ç—Å—ã–ª–∫–∞ –µ–≥–æ –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª—é –≤ –æ—Ç–≤–µ—Ç –Ω–∞ –∑–∞–ø—Ä–æ—Å –∫–ª–∏–µ–Ω—Ç–∞ (—Å—Ç—Ä–æ–∫–∏ 206 – 211 –∏ 212 – 217). –°–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—â–∏–µ –±–∏—Ç—ã —Ñ–ª–∞–≥–∞ –æ–±–Ω—É–ª—è—é—Ç—Å—è –≤ —Å—Ç—Ä–æ–∫–∞—Ö 208 –∏ 214, —Ä–µ–∞–ª–∏–∑—É—è –µ–¥–∏–Ω–∏—á–Ω–æ–µ –∏–∑–º–µ—Ä–µ–Ω–∏–µ –ø–∞—Ä–∞–º–µ—Ç—Ä–∞ –ø—Ä–∏ –∫–∞–∂–¥–æ–º –∑–∞–ø—Ä–æ—Å–µ –∫–ª–∏–µ–Ω—Ç–∞. –ï—Å–ª–∏-–∂–µ –≤—ã—Å—Ç–∞–≤–ª–µ–Ω –±–∏—Ç 0 —Ñ–ª–∞–≥–∞, —Ç–æ –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è —Å–æ—Ö—Ä–∞–Ω–µ–Ω–∏–µ –æ–±–æ–∏—Ö –ø–∞—Ä–∞–º–µ—Ç—Ä–æ–≤ –≤ –±–∞–∑–µ –¥–∞–Ω–Ω—ã—Ö (—Å—Ç—Ä–æ–∫–∏ 220 – 221) –∏ –æ—Ç—Å—ã–ª–∫–∞ –Ω–æ—Ç–∏—Ñ–∏–∫–∞—Ü–∏–∏ –∫–ª–∏–µ–Ω—Ç—É –≤ —Å—Ç—Ä–æ–∫–µ 222. –ü—Ä–∏ —ç—Ç–æ–º –±–∏—Ç —Ñ–ª–∞–≥–∞ –Ω–µ —Å—Ç–∏—Ä–∞–µ—Ç—Å—è –∏ –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è –∑–∞–¥–µ—Ä–∂–∫–∞ –Ω–∞ 1 —Å–µ–∫ (—Å—Ç—Ä–æ–∫–∞ 224) –¥–ª—è –ø—Ä–æ–∏–∑–≤–æ–¥—Å—Ç–≤–∞ –ø–µ—Ä–∏–æ–¥–∏—á–µ—Å–∫–∏—Ö –∏–∑–º–µ—Ä–µ–Ω–∏–π. –£–ø—Ä–∞–≤–ª–µ–Ω–∏–µ –±–∏—Ç–æ–º 0 —Ñ–ª–∞–≥–∞ –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è –ø—É—Ç—ë–º –º–æ–¥–∏—Ñ–∏–∫–∞—Ü–∏–∏ CCCD –¥–µ—Å–∫—Ä–∏–ø—Ç–æ—Ä–∞ —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫–∏ air_temp_humi. –ü—Ä–∏ –ø–µ—Ä–∏–æ–¥–∏—á–µ—Å–∫–æ–º –∏–∑–º–µ—Ä–µ–Ω–∏–∏ –ø–∞—Ä–∞–º–µ—Ç—Ä–æ–≤ —Å—Ä–µ–¥—ã —Ç–∞–∫–∂–µ –≤–æ–∑–º–æ–∂–µ–Ω –∑–∞–ø—Ä–æ—Å –Ω–∞ –ø—Ä–æ–∏–∑–≤–æ–¥—Å—Ç–≤–æ –µ–¥–∏–Ω–∏—á–Ω—ã—Ö –∏–∑–º–µ—Ä–µ–Ω–∏–π —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—ã –∏ –≤–ª–∞–∂–Ω–æ—Å—Ç–∏. –û–±—Ä–∞–±–æ—Ç–∫–∞ –∑–∞–ø—Ä–æ—Å–æ–≤ –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª—è –∏–Ω–¥–∏—Ü–∏—Ä—É–µ—Ç—Å—è —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º LED1, –≤–∫–ª—é—á–∞–µ–º—ã–º –∏ –≤—ã–∫–ª—é—á–∞–µ–º—ã–º –≤ —Å—Ç—Ä–æ–∫–∞—Ö 202 –∏ 226. –Ý–∞—Å—Å–º–æ—Ç—Ä–∏–º —Ç–µ–ø–µ—Ä—å —Ä–∞–±–æ—Ç—É –ø–æ—Ç–æ–∫–∞ BluetoothAppTask –≤ —Ñ–∞–π–ª–µ main.c. –≠—Ç–æ—Ç –ø–æ—Ç–æ–∫ —è–≤–ª—è–µ—Ç—Å—è —Å–≤—è–∑—É—é—â–∏–º –∑–≤–µ–Ω–æ–º –º–µ–∂–¥—É –≥–ª–∞–≤–Ω—ã–º –ø–æ—Ç–æ–∫–æ–º (–ø–æ—Ç–æ–∫–∞–º–∏) –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è, —Ä–∞—Å—Å–º–æ—Ç—Ä–µ–Ω–Ω–æ–º –≤—ã—à–µ, –∏ –ø–æ—Ç–æ–∫–∞–º–∏ Bluetooth —Å—Ç–µ–∫–∞ –≤ —Ñ–∞–π–ª–µ rtos_bluetooth.c. –í –∫–æ–¥–µ —ç—Ç–æ–≥–æ –ø–æ—Ç–æ–∫–∞ –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è –æ–±—Ä–∞–±–æ—Ç–∫–∞ —Å–æ–±—ã—Ç–∏–π —Å—Ç–µ–∫–∞, –æ–ø–∏—Å–∞–Ω–Ω—ã—Ö –≤ –ø–µ—Ä–≤–æ–π —á–∞—Å—Ç–∏ —Å—Ç–∞—Ç—å–∏ [2]. –ë–æ–ª—å—à–∏–Ω—Å—Ç–≤–æ —Å–æ–±—ã—Ç–∏–π —Ç–∞–∫–∏–µ-–∂–µ –∫–∞–∫ –∏ –≤ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–∏ —Å–µ—Ä–≤–µ—Ä–∞ –≤ [2], –ø–æ—ç—Ç–æ–º—É –Ω–∞ –Ω–∏—Ö —è –∑–¥–µ—Å—å –æ—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞—Ç—å—Å—è –Ω–µ –±—É–¥—É, –∞ –æ–ø–∏—à—É –ª–∏—à—å 2 –Ω–æ–≤—ã—Ö —Å–æ–±—ã—Ç–∏—è. –ü–µ—Ä–≤—ã–º –∏–∑ –Ω–∏—Ö —è–≤–ª—è–µ—Ç—Å—è —Å–æ–±—ã—Ç–∏–µ gatt_server_user_write_request, –≥–µ–Ω–µ—Ä–∏—Ä—É–µ–º–æ–µ –ø—Ä–∏ –∑–∞–ø–∏—Å–∏ –∫–ª–µ–Ω—Ç–æ–º –∑–Ω–∞—á–µ–Ω–∏–π –≤ –±–∞–∑—É –¥–∞–Ω–Ω—ã—Ö —Å–µ—Ä–≤–µ—Ä–∞. –í –Ω–∞—à–µ–º —Å–ª—É—á–∞–µ —ç—Ç–æ –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç —Ç–æ–ª—å–∫–æ –ø—Ä–∏ –º–æ–¥–∏—Ñ–∏–∫–∞—Ü–∏–∏ –∫–ª–∏–µ–Ω—Ç–æ–º –¥–µ—Å–∫—Ä–∏–ø—Ç–æ—Ä–∞ CCCD —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫–∏ air_temp_humi –ø—Ä–∏ —Ä–∞–∑—Ä–µ—à–µ–Ω–∏–∏ –∏ –∑–∞–ø—Ä–µ—â–µ–Ω–∏–∏ –æ—Ç—Å—ã–ª–∫–∏ –Ω–æ—Ç–∏—Ñ–∏–∫–∞—Ü–∏–π. –≠—Ç–æ—Ç –¥–µ—Å–∫—Ä–∏–ø—Ç–æ—Ä –¥–æ–±–∞–≤–ª—è–µ—Ç—Å—è –≥—Ä–∞—Ñ–∏—á–µ—Å–∫–∏–º –∫–æ–Ω—Ñ–∏–≥—É—Ä–∞—Ç–æ—Ä–æ–º –ø—Ä–æ—Ñ–∏–ª—è Bluetooth –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏ –¥–ª—è –∫–∞–∂–¥–æ–π —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫–∏, —É –∫–æ—Ç–æ—Ä–æ–π —Ä–∞–∑—Ä–µ—à–µ–Ω–∞ –µ—ë –Ω–æ—Ç–∏—Ñ–∏–∫–∞—Ü–∏—è. –ü—Ä–∏ –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–æ–º –¥–æ–±–∞–≤–ª–µ–Ω–∏–∏ –¥–µ—Å–∫—Ä–∏–ø—Ç–æ—Ä–∞ CCCD —Å—Ç–µ–∫ –Ω–µ –∏–Ω—Ñ–æ—Ä–º–∏—Ä—É–µ—Ç –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–µ –æ–± –µ–≥–æ –∏–∑–º–µ–Ω–µ–Ω–∏–∏ –∫–ª–∏–µ–Ω—Ç–æ–º –∏, —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–µ–Ω–Ω–æ, –Ω–µ –≥–µ–Ω–µ—Ä–∏—Ä—É–µ—Ç —Å–æ–±—ã—Ç–∏–µ gatt_server_user_write_request. –í –Ω–∞—à–µ–º —Å–ª—É—á–∞–µ –∏–Ω—Ñ–æ—Ä–º–∏—Ä–æ–≤–∞–Ω–∏–µ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ –¥–ª—è –≤—ã—Å—Ç–∞–≤–ª–µ–Ω–∏—è –±–∏—Ç–∞ 0 —Ñ–ª–∞–≥–∞, —É–ø—Ä–∞–≤–ª—è—é—â–µ–≥–æ –≥–ª–∞–≤–Ω—ã–º –ø–æ—Ç–æ–∫–æ–º –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª—è. –î–ª—è –¥–æ—Å—Ç–∏–∂–µ–Ω–∏—è —ç—Ç–æ–≥–æ —è –¥–æ–±–∞–≤–∏–ª —è–≤–Ω–æ CCCD –¥–µ—Å–∫—Ä–∏–ø—Ç–æ—Ä –≤ –ø—Ä–æ—Ñ–∏–ª—å –ø—Ä–æ–µ–∫—Ç–∞ –∏ –∏–∑–º–µ–Ω–∏–ª –µ–≥–æ Value type —Å –¥–µ—Ñ–æ–ª—Ç–Ω–æ–≥–æ –∑–Ω–∞—á–µ–Ω–∏—è –Ω–∞ user, –∫–∞–∫ –ø–æ–∫–∞–∑–∞–Ω–æ –Ω–∏–∂–µ: –ë–ª–∞–≥–æ–¥–∞—Ä—è –æ–ø–∏—Å–∞–Ω–Ω—ã–º –∏–∑–º–µ–Ω–µ–Ω–∏—è–º –ø—Ä–æ—Ñ–∏–ª—è, –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ–µ —Å–æ–±—ã—Ç–∏–µ –ø—Ä–∏ –∏–∑–º–µ–Ω–µ–Ω–∏–∏ CCCD –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª–µ–º —Ç–µ–ø–µ—Ä—å –≥–µ–Ω–µ—Ä–∏—Ä—É–µ—Ç—Å—è —Å—Ç–µ–∫–æ–º, –∏ –≤ –µ–≥–æ –æ–±—Ä–∞–±–æ—Ç—á–∏–∫–µ –º—ã —á–∏—Ç–∞–µ–º —É—Å—Ç–∞–Ω–æ–≤–ª–µ–Ω–Ω–æ–µ –∑–Ω–∞—á–µ–Ω–∏–µ –∏–∑ –±–∞–∑—ã –¥–∞–Ω–Ω—ã—Ö Bluetooth (—Å—Ç—Ä–æ–∫–∞ 277) –∏ —É—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞–µ–º (–∏–ª–∏ —Å–±—Ä–∞—Å—ã–≤–∞–µ–º) –±–∏—Ç 0 —Ñ–ª–∞–≥–æ–≤–æ–π –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π (—Å—Ç—Ä–æ–∫–∏ 279 – 282). –≠—Ç–æ –ø—Ä–∏–≤–æ–¥–∏—Ç –∫ –ø—Ä–æ–¥–æ–ª–∂–µ–Ω–∏—é –ø–ª–∞–Ω–∏—Ä–æ–≤—â–∏–∫–æ–º –≤—ã—á–∏—Å–ª–µ–Ω–∏—è –≥–ª–∞–≤–Ω–æ–≥–æ –ø–æ—Ç–æ–∫–∞ –Ω–∞—à–µ–≥–æ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è –∏ –ø—Ä–æ–∏–∑–≤–æ–¥—Å—Ç–≤—É –ø–µ—Ä–∏–æ–¥–∏—á–µ—Å–∫–∏—Ö –∏–∑–º–µ—Ä–µ–Ω–∏–π. –ó–∞–ø–∏—Å—å –∑–Ω–∞—á–µ–Ω–∏—è CCCD –≤ –±–∞–∑—É –¥–∞–Ω–Ω—ã—Ö —Å–µ—Ä–≤–µ—Ä–∞ –æ–±–µ—Å–ø–µ—á–∏–≤–∞–µ—Ç—Å—è —Å—Ç–µ–∫–æ–º –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏. –ù–∞–ø–æ–º–Ω—é, —á—Ç–æ –∑–Ω–∞—á–µ–Ω–∏–µ CCCD –∏–º–µ–µ—Ç –¥–ª–∏–Ω—É 2 –±–∞–π—Ç–∞, –∏–∑ –∫–æ—Ç–æ—Ä—ã—Ö –æ–¥–∏–Ω –∏—Å–ø–æ–ª—å–∑—É–µ—Ç—Å—è –¥–ª—è —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è/–∑–∞–ø—Ä–µ—â–µ–Ω–∏—è –Ω–æ—Ç–∏—Ñ–∏–∫–∞—Ü–∏–π, –∞ –¥—Ä—É–≥–æ–π – –¥–ª—è –∏–Ω–¥–∏–∫–∞—Ü–∏–π. –î–ª—è —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è –ø–µ—Ä–µ–¥–∞—á–∏ –Ω–æ—Ç–∏—Ñ–∏–∫–∞—Ü–∏–π –ø–∞—Ä–∞–º–µ—Ç—Ä–æ–≤ —Å—Ä–µ–¥—ã –∫–ª–∏–µ–Ω—Ç—É —Å–ª–µ–¥—É–µ—Ç –∑–∞–ø–∏—Å–∞—Ç—å –≤ CCCD –∑–Ω–∞—á–µ–Ω–∏–µ 01:00 (little-endian), –≥–¥–µ –ø–µ—Ä–≤—ã–π –±–∞–π—Ç –æ—Ç–≤–µ—á–∞–µ—Ç –∑–∞ –Ω–æ—Ç–∏—Ñ–∏–∫–∞—Ü–∏–∏. –ê–Ω–∞–ª–æ–≥–∏—á–Ω–æ, –¥–ª—è –∏–Ω—Ñ–æ—Ä–º–∏—Ä–æ–≤–∞–Ω–∏—è –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è –æ –∑–∞–ø—Ä–æ—Å–µ –∫–ª–∏–µ–Ω—Ç–æ–º —á—Ç–µ–Ω–∏—è —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫–∏ —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—ã –∏–ª–∏ –≤–ª–∞–∂–Ω–æ—Å—Ç–∏, —Å–ª–µ–¥—É–µ—Ç —Ä–∞–∑—Ä–µ—à–∏—Ç—å —Å—Ç–µ–∫—É –≥–µ–Ω–µ—Ä–∏—Ä–æ–≤–∞–Ω–∏–µ —Å–æ–±—ã—Ç–∏—è gatt_server_user_read_request. –≠—Ç–æ —Ç–∞–∫–∂–µ –¥–æ—Å—Ç–∏–≥–∞–µ—Ç—Å—è –∏–∑–º–µ–Ω–µ–Ω–∏–µ–º –∑–Ω–∞—á–µ–Ω–∏—è Value type —ç—Ç–∏—Ö —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫ –≤ –ø—Ä–æ—Ñ–∏–ª–µ —Å –¥–µ—Ñ–æ–ª—Ç–Ω–æ–≥–æ –∑–Ω–∞—á–µ–Ω–∏—è –Ω–∞ user. –í –æ–±—Ä–∞–±–æ—Ç—á–∏–∫–µ —ç—Ç–æ–≥–æ —Å–æ–±—ã—Ç–∏—è –º—ã —É—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞–µ–º –±–∏—Ç—ã 1 –∏–ª–∏ 2 —Ñ–ª–∞–≥–æ–≤–æ–π –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π, —É–ø—Ä–∞–≤–ª—è—é—â–µ–π while-—Ü–∏–∫–ª–æ–º –≥–ª–∞–≤–Ω–æ–≥–æ –ø–æ—Ç–æ–∫–∞ (—Å—Ç—Ä–æ–∫–∏ 290 – 295. –¢–∞–∫ –∫–∞–∫ —Ç–∏–ø CCCD —Ç–∞–∫–∂–µ —É—Å—Ç–∞–Ω–æ–≤–ª–µ–Ω –∫–∞–∫ user, –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ –¥–æ–±–∞–≤–∏—Ç—å —Å—Ç—Ä–æ–∫—É 288 –Ω–∞ —Å–ª—É—á–∞–π —á—Ç–µ–Ω–∏—è –∫–ª–∏–µ–Ω—Ç–æ–º —ç—Ç–æ–≥–æ –¥–µ—Å–∫—Ä–∏–ø—Ç–æ—Ä–∞ (—Å—Ç—Ä–æ–∫–∏ 287 – 289), –∏–Ω–∞—á–µ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—é –∫–ª–∏–µ–Ω—Ç–∞ –Ω–∞ —Å–º–∞—Ä—Ç—Ñ–æ–Ω–µ —ç—Ç–æ, –º—è–≥–∫–æ –≥–æ–≤–æ—Ä—è, –Ω–µ –ø–æ–Ω—Ä–∞–≤–∏—Ç—Å—è –∏ –ø—Ä–∏ –Ω–µ–ø–æ–ª—É—á–µ–Ω–∏–∏ –æ—Ç–≤–µ—Ç–∞ –≤ —Ç–µ—á–µ–Ω–∏–∏ 30 —Å–µ–∫—É–Ω–¥ –æ–Ω–æ –º–æ–∂–µ—Ç —Ä–∞–∑–æ—Ä–≤–∞—Ç—å —Å–æ–µ–¥–∏–Ω–µ–Ω–∏–µ —Å —Å–µ—Ä–≤–µ—Ä–æ–º. –û—Ç—Å—ã–ª–∫–∞ –æ—Ç–≤–µ—Ç–æ–≤ –Ω–∞ –∑–∞–ø—Ä–æ—Å –∫–ª–∏–µ–Ω—Ç–∞ —á—Ç–µ–Ω–∏—è –æ—Å—Ç–∞–ª—å–Ω—ã—Ö —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫ –ø—Ä–æ—Ñ–∏–ª—è –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è –≤ –≥–ª–∞–≤–Ω–æ–º –ø–æ—Ç–æ–∫–µ –≤ —Å—Ç—Ä–æ–∫–∞—Ö 210 –∏ 216. –ò—Ç–∞–∫, —á–µ–≥–æ-–∂–µ –º—ã –¥–æ–±–∏–ª–∏—Å—å? –ü—Ä–µ–∂–¥–µ –≤—Å–µ–≥–æ, –º—ã –ø–µ—Ä–µ–ª–æ–∂–∏–ª–∏ –≤—Å—é –≥–æ–ª–æ–≤–Ω—É—é –±–æ–ª—å –≤—Ä–µ–º–µ–Ω–Ω–æ–π —Å–∏–Ω—Ö—Ä–æ–Ω–∏–∑–∞—Ü–∏–∏ –Ω–∞—à–µ–≥–æ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è —Å —Ä–∞–±–æ—Ç–æ–π —Å—Ç–µ–∫–∞ Bluetooth –Ω–∞ –ø–ª–µ—á–∏ Micriµm OS, –∏ –æ–¥–Ω–æ —ç—Ç–æ —É–∂–µ —Å–æ–≤—Å–µ–º –¥–∞–∂–µ –Ω–µ–º–∞–ª–æ. –°—Ä–∞–≤–Ω–∏–º —Ç–µ–ø–µ—Ä—å —Ç–æ–∫–æ–ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ –Ω–∞—à–µ–≥–æ —Å–µ—Ä–≤–µ—Ä–∞ —Å RTOS —Å –∞–Ω–∞–ª–æ–≥–∏—á–Ω—ã–º –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–µ–º –±–µ–∑ RTOS, –æ–ø–∏—Å–∞–Ω–Ω–æ–º –≤ –ø–µ—Ä–≤–æ–π —á–∞—Å—Ç–∏ —Å—Ç–∞—Ç—å–∏ [2]. –ö–∞–∫ –ø–æ–∫–∞–∑–∞–Ω–æ –≤ –æ—Å—Ü–∏–ª–ª–æ–≥—Ä–∞–º–º–∞—Ö –∏–∑ [2], –∏–∑–º–µ—Ä–µ–Ω–Ω–æ–µ —Å—Ä–µ–¥–Ω–µ–µ —Ç–æ–∫–æ–ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ –≤ —Ä–µ–∂–∏–º–µ –ø–µ—Ä–µ–¥–∞—á–∏ –æ–ø–æ–≤–µ—â–µ–Ω–∏–π –±—ã–ª–æ 23.33 –º–∫–ê. –ü–æ—Å–ª–µ —É—Å—Ç–∞–Ω–æ–≤–∫–∏ —Å–æ–µ–¥–∏–Ω–µ–Ω–∏—è —Å –∫–ª–∏–µ–Ω—Ç–æ–º –æ–Ω–æ –±—ã–ª–æ –æ–∫–æ–ª–æ 81.19 –º–∫–ê –∑–∞ –ø–µ—Ä–∏–æ–¥ –∫–æ–º–º—É–Ω–∏–∫–∞—Ü–∏–∏ (100–º—Å). –ù–∏–∂–µ –ø—Ä–µ–¥—Å—Ç–∞–≤–ª–µ–Ω –≥—Ä–∞—Ñ–∏–∫ –∏–∑–º–µ—Ä–µ–Ω–Ω–æ–≥–æ —Ç–æ–∫–æ–ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏—è —Å–µ—Ä–≤–µ—Ä–∞ —Å RTOS –∏–∑ —ç—Ç–æ–π —Å—Ç–∞—Ç—å–∏ –≤ —Ä–µ–∂–∏–º–µ –ø–µ—Ä–µ–¥–∞—á–∏ –æ–ø–æ–≤–µ—â–µ–Ω–∏–π. –ì–ª–∞–≤–Ω—ã–µ –ø–∏–∫–∏ —Å –ø–µ—Ä–∏–æ–¥–æ–º 1 —Å–µ–∫ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—Ç –º–æ–º–µ–Ω—Ç–∞–º –ø–µ—Ä–µ–¥–∞—á–∏ –æ–ø–æ–≤–µ—â–µ–Ω–∏–π, –∞ –≤—Ç–æ—Ä–æ—Å—Ç–µ–ø–µ–Ω–Ω—ã–µ, –≤–∏–¥–∏–º–æ, –∫–∞–∫ –∏ —Ä–∞–Ω–µ–µ —Å–≤—è–∑–∞–Ω—ã —Å —Ä–∞–±–æ—Ç–æ–π DC/DC –∫–æ–Ω–≤–µ—Ä—Ç–µ—Ä–∞ –Ω–∞ –±–æ—Ä—Ç—É –º–æ–¥—É–ª—è. –ü–æ—Å–ª–µ —É—Å—Ç–∞–Ω–æ–≤–∫–∏ —Å–æ–µ–¥–∏–Ω–µ–Ω–∏—è —Å –∫–ª–∏–µ–Ω—Ç–æ–º —Å –ø–µ—Ä–∏–æ–¥–æ–º —Å–µ–∞–Ω—Å–æ–≤ —Å–≤—è–∑–∏ 100–º—Å —Ç–æ–∫–æ–ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ –≤—ã–≥–ª—è–¥–∏—Ç —Å–ª–µ–¥—É—é—â–∏–º –æ–±—Ä–∞–∑–æ–º: –û–±–∞ –≥—Ä–∞—Ñ–∏–∫–∞ –ø—Ä–∏–≤–µ–¥–µ–Ω—ã —Å –≤—ã–∫–ª—é—á–µ–Ω–Ω—ã–º–∏ —Å–≤–µ—Ç–æ–¥–∏–æ–¥–∞–º–∏ LED0 –∏ LED1 –Ω–∞ –ø–ª–∞—Ç–µ. –ò–∑ –Ω–∏—Ö –≤—ã—Ç–µ–∫–∞–µ—Ç, —á—Ç–æ —Å—Ä–µ–¥–Ω–µ–µ —Ç–æ–∫–æ–ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ –≤ –æ–±–æ–∏—Ö —Ä–µ–∂–∏–º–∞—Ö –≤–æ–∑—Ä–æ—Å–ª–æ –Ω–µ–∑–Ω–∞—á–∏—Ç–µ–ª—å–Ω–æ - (26.15 –º–∫–ê –≤–º–µ—Å—Ç–æ 23.33) –∏ (87.82 –º–∫–ê –≤–º–µ—Å—Ç–æ 81.19), —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–µ–Ω–Ω–æ. –ü—Ä–∏ –æ—Ç–ª–∞–¥–∫–µ RTOS –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–π –ø–æ–ª–µ–∑–Ω–æ –∑–Ω–∞—Ç—å –æ–± –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏–∏ –æ–±–ª–∞—Å—Ç–µ–π —Å—Ç–µ–∫–∞ –ø–æ—Ç–æ–∫–∞–º–∏, —á—Ç–æ–±—ã –ø—Ä–µ–¥–æ—Ç–≤—Ä–∞—Ç–∏—Ç—å –∏—Ö –ø–µ—Ä–µ–ø–æ–ª–Ω–µ–Ω–∏–µ. –≠—Ç–æ –º–æ–∂–Ω–æ —Å–¥–µ–ª–∞—Ç—å —Å –ø–æ–º–æ—à—å—é –∏–Ω—Å—Ç—Ä—É–º–µ–Ω—Ç–∞ µC/Probe, –∫–∞–∫ —Ä–∞—Å—Å–∫–∞–∑–∞–Ω–æ –≤ [2]. –î–ª—è —ç—Ç–æ–≥–æ —Å–ª–µ–¥—É–µ—Ç —Ä–∞–∑—Ä–µ—à–∏—Ç—å —Å–ª—É–∂–µ–±–Ω—ã–µ –ø–æ—Ç–æ–∫–∏ —Ç–∞–π–º–µ—Ä–∞ –∏ —Å–±–æ—Ä–∞ —Å—Ç–∞—Ç–∏—Å—Ç–∏–∫–∏ RTOS, —á—Ç–æ –¥–æ—Å—Ç–∏–≥–∞–µ—Ç—Å—è —É—Å—Ç–∞–Ω–æ–≤–∫–æ–π –∑–Ω–∞—á–µ–Ω–∏—è –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π RTOS_DEBUG_MODE –≤ 1. –ü—Ä–∏ —ç—Ç–æ–º –±–ª–æ–∫–∏—Ä–æ–≤–∞–Ω–Ω—ã–µ —ç—Ç–æ–π –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π –æ–±–ª–∞—Å—Ç–∏ –¥–µ—Ñ–∞–π–Ω–æ–≤ –≤ —Ñ–∞–π–ª–µ main.h –≤–æ–π–¥—É—Ç –≤ –æ–±—â–∏–π –¥–µ—Ñ–∞–π–Ω –Ω–∞—Å—Ç—Ä–æ–∫–∏ RTOS. –£—Å—Ç–∞–Ω–æ–≤–∫–∞ –∑–Ω–∞—á–µ–Ω–∏—è —ç—Ç–æ–π –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—Å—è –≤ –Ω–∞—Å—Ç—Ä–æ–π–∫–∞—Ö –ø—Ä–æ–µ–∫—Ç–∞ –∫–∞–∫ –ø–æ–∫–∞–∑–∞–Ω–æ –Ω–∏–∂–µ. –ü—Ä–æ–µ–∫—Ç –∑–∞—Ç–µ–º —Å–ª–µ–¥—É–µ—Ç –ø–µ—Ä–µ–∫–æ–º–ø–∏–ª–∏—Ä–æ–≤–∞—Ç—å –∏ –∑–∞–≥—Ä—É–∑–∏—Ç—å –≤ –ú–ö. –î–∞–Ω–Ω—ã–µ, —Å–Ω—è—Ç—ã–µ –∏–Ω—Å—Ç—Ä—É–º–µ–Ω—Ç–æ–º µC/Probe –¥–ª—è –Ω–∞—à–µ–≥–æ –ø—Ä–æ–µ–∫—Ç–∞ –≤ —Ä–µ–∂–∏–º–µ —Å–æ–µ–¥–∏–Ω–µ–Ω–∏—è —Å –∫–ª–∏–µ–Ω—Ç–æ–º, –ø–æ–∫–∞–∑–∞–Ω—ã –Ω–∏–∂–µ, –æ—Ç–∫—É–¥–∞ —Å–ª–µ–¥—É–µ—Ç, —á—Ç–æ –æ–±–ª–∞—Å—Ç–∏ —Å—Ç–µ–∫–æ–≤ –ø—Ä–æ—Ü–µ—Å—Å–æ–≤ —É—Å—Ç–∞–Ω–æ–≤–ª–µ–Ω—ã —Å –¥–æ—Å—Ç–∞—Ç–æ—á–Ω—ã–º –∑–∞–ø–∞—Å–æ–º –∏ –º–æ–≥—É—Ç –±—ã—Ç—å –ø—Ä–∏ –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ—Å—Ç–∏ —É–º–µ–Ω—å—à–µ–Ω—ã. –í –∑–∞–∫–ª—é—á–µ–Ω–∏–∏ –Ω–µ—Å–∫–æ–ª—å–∫–æ —Å–ª–æ–≤ –æ –º–æ–¥–∏—Ñ–∏–∫–∞—Ü–∏—è—Ö –≤ –¥—Ä–∞–π–≤–µ—Ä–µ —Å–µ–Ω—Å–æ—Ä–∞ Si7021 –≤ —Ñ–∞–π–ª–µ si7021.c. –û–Ω —Ç–∞–∫–∂–µ –æ—Å–Ω–æ–≤–∞–Ω –Ω–∞ –¥—Ä–∞–π–≤–µ—Ä–µ –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å–∞ I2C –±–∏–±–ª–∏–æ—Ç–µ–∫–∏ Emlib. –û–¥–Ω–∞–∫–æ, —Å —Ü–µ–ª—å—é —É–º–µ–Ω—å—à–µ–Ω–∏—è —Ç–æ–∫–æ–ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏—è –≤–≤–µ–¥–µ–Ω–∞ –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç—å –ø–æ–≥—Ä—É–∂–µ–Ω–∏—è –ú–ö –≤ —Å–æ–Ω –Ω–∞ –≤—Ä–µ–º—è I2C —Ç—Ä–∞–Ω–∑–∞–∫—Ü–∏–π. –≠—Ç–æ –¥–æ—Å—Ç–∏–≥–∞–µ—Ç—Å—è —É—Å—Ç–∞–Ω–æ–≤–∫–æ–π –¥–µ—Ñ–∞–π–Ω–∞ USE_I2C_INT –≤ 1, —á—Ç–æ –ø—Ä–∏–≤–æ–¥–∏—Ç –∫ –ø–æ–≥—Ä—É–∂–µ–Ω–∏—é –ú–ö –≤ —Å–æ–Ω –≤ —Å—Ç—Ä–æ–∫–µ 56. –î–µ—Ñ–æ–ª—Ç–Ω—ã–π —Ä–µ–∂–∏–º —Å–Ω–∞ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è – —ç—Ç–æ EM2 (Deep Sleep), –æ–¥–Ω–∞–∫–æ –Ω–∞ –≤—Ä–µ–º—è —Ç—Ä–∞–Ω–∑–∞–∫—Ü–∏–π –Ω—É–∂–µ–Ω —Ä–µ–∂–∏–º —Å–Ω–∞ EM1, –≤ –∫–æ—Ç–æ—Ä–æ–º —Ä–∞–±–æ—Ç–∞ –≥–µ–Ω–µ—Ä–∞—Ç–æ—Ä–∞, —Ç–∞–∫—Ç–∏—Ä—É—é—â–µ–≥–æ –º–æ–¥—É–ª—å I2C –≤ –ú–ö, –Ω–µ –ø—Ä–µ–∫—Ä–∞—â–∞–µ—Ç—Å—è. –î–ª—è —ç—Ç–æ–≥–æ —Å–ª—É–∂–∏—Ç –≤—ã–∑–æ–≤ API —Ñ—É–Ω–∫—Ü–∏–π –≤ —Å—Ç—Ä–æ–∫–∞—Ö 52 –∏ 61, –æ–ø—Ä–µ–¥–µ–ª—è—é—â–∏—Ö –æ–±–ª–∞—Å—Ç—å –∫–æ–¥–∞, –≥–¥–µ –∑–∞–ø—Ä–µ—â—ë–Ω —Ä–µ–∂–∏–º –≥–ª—É–±–æ–∫–æ–≥–æ —Å–Ω–∞ EM2. –ü—Ä–∏ —ç—Ç–æ–º –≤ –∫–æ–¥ —Ç–∞–∫–∂–µ –¥–æ–±–∞–≤–ª—è–µ—Ç—Å—è –æ–±—Ä–∞–±–æ—Ç—á–∏–∫ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–π I2C (—Å—Ç—Ä–æ–∫–∏ 64 – 69), –∫–æ—Ç–æ—Ä—ã–π, –∫–∞–∫ –º—ã —É–∂–µ –∑–Ω–∞–µ–º –∏–∑ [1], –æ—Ñ–æ—Ä–º–ª–µ–Ω –∫–∞–∫ NKA (Non-Kernel Aware). –í –∫–æ–¥e —Ñ—É–Ω–∫—Ü–∏–∏ SI7021_getTempHumi() –∏–º–µ–µ—Ç—Å—è —Ü–∏–∫–ª –æ–∂–∏–¥–∞–Ω–∏—è –ø–æ–¥—Ç–≤–µ—Ä–∂–¥–µ–Ω–∏—è —Å–µ–Ω—Å–æ—Ä–æ–º —Å–≤–æ–µ–≥–æ –∞–¥—Ä–µ—Å–∞, —á—Ç–æ —è–≤–ª—è–µ—Ç—Å—è —Å–∏–≥–Ω–∞–ª–æ–º –æ–∫–æ–Ω—á–∞–Ω–∏—è –∏–∑–º–µ—Ä–µ–Ω–∏—è. –•–æ—Ç—è –∏–∑–º–µ—Ä–µ–Ω–∏–µ –∑–∞–Ω–∏–º–∞–µ—Ç –≤—Å–µ–≥–æ –æ–∫–æ–ª–æ 15–º—Å, –ª—É—á—à–∏–º —Ä–µ—à–µ–Ω–∏–µ–º –±—ã–ª–æ-–±—ã –ø—Ä–∏–º–µ–Ω–∏—Ç—å —Å–µ–Ω—Å–æ—Ä —Å –≤—ã–≤–æ–¥–æ–º INT (–Ω–∞–ø—Ä–∏–º–µ—Ä, HDC2010) –¥–ª—è —ç—Ç–æ–π —Ü–µ–ª–∏. –¢–æ–≥–¥–∞ –º–æ–∂–Ω–æ –±—ã–ª–æ-–±—ã –¥–æ–ª—å—à–µ –Ω–∞—Ö–æ–¥–∏—Ç—å—Å—è –≤ —Ä–µ–∂–∏–º–µ –≥–ª—É–±–æ–∫–æ–≥–æ —Å–Ω–∞ –∏ —Ä–∞–∑–±–ª–æ–∫–∏—Ä–æ–≤–∞—Ç—å —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—â–∏–π –ø—Ä–æ—Ü–µ—Å—Å —Å–µ–º–∞—Ñ–æ—Ä–æ–º –∏–∑ KA (Kernel Aware) –æ–±—Ä–∞–±–æ—Ç—á–∏–∫–∞ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–π –≤—ã–≤–æ–¥–∞ –ú–ö, —Å–æ–µ–¥–∏–Ω—ë–Ω–Ω–æ–≥–æ —Å —É–∫–∞–∑–∞–Ω–Ω—ã–º –≤—ã–≤–æ–¥–æ–º —Å–µ–Ω—Å–æ—Ä–∞. –ü–æ—Ä—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ –ø—Ä–æ–µ–∫—Ç–∞ –Ω–∞ –º–æ–¥—É–ª—å –ê–ø–ø–∞—Ä–∞—Ç–Ω–∞—è —á–∞—Å—Ç—å –Ω–∞—à–µ–≥–æ —Å–µ—Ä–≤–µ—Ä–∞ —Å–æ–±—Ä–∞–Ω–∞ –ø–æ —Å–ª–µ–¥—É—é—â–µ–π —Å—Ö–µ–º–µ –Ω–∞ –±–µ–∑–ø–∞—è—á–Ω–æ–π –º–æ–Ω—Ç–∞–∂–∫–µ. 5-—à—Ç—ã—Ä—å–∫–æ–≤—ã–π –∫–æ–Ω–Ω–µ–∫—Ç–æ—Ä –≤ —Å—Ö–µ–º–µ –∏—Å–ø–æ–ª—å–∑—É–µ—Ç—Å—è –¥–ª—è –∑–∞–≥—Ä—É–∑–∫–∏ –ø—Ä–æ—à–∏–≤–∫–∏ –≤ –º–æ–¥—É–ª—å —á–µ—Ä–µ–∑ –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å SWD. –°–∏–≥–Ω–∞–ª—ã SWCLK –∏ SWDIO –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å–∞ –¥–µ—Ñ–æ–ª—Ç–Ω–æ –¥–æ—Å—Ç—É–ø–Ω—ã —á–µ—Ä–µ–∑ –≤—ã–≤–æ–¥—ã PF0 –∏ PF1 –º–æ–¥—É–ª—è, —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–µ–Ω–Ω–æ. –ü—Ä–µ–∂–¥–µ –≤—Å–µ–≥–æ, –Ω–∞—Å—Ç–æ—è—Ç–µ–ª—å–Ω–æ —Ä–µ–∫–æ–º–µ–Ω–¥—É—é –∑–∞–≥—Ä—É–∑–∏—Ç—å –≤ –º–æ–¥—É–ª—å –Ω–æ–≤—ã–π –±—É—Ç–ª–æ–∞–¥–µ—Ä, —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—â–∏–π —Ç–µ–∫—É—â–µ–π –≤–µ—Ä—Å–∏–∏ SDK. –≠—Ç–æ, –≤ —á–∞—Å—Ç–Ω–æ—Å—Ç–∏, –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ –¥–ª—è —Ñ—É–Ω–∫—Ü–∏–æ–Ω–∏—Ä–æ–≤–∞–Ω–∏—è –∞–ø–¥–µ–π—Ç–æ–≤ –ü–û –ø–æ –≤–æ–∑–¥—É—Ö—É (OTA). –î–ª—è –∑–∞–≥—Ä—É–∑–∫–∏ –±—É—Ç–ª–æ–∞–¥–µ—Ä–∞ —Å–ª–µ–¥—É–µ—Ç —Å–Ω–∞—á–∞–ª–∞ —Å–æ–∑–¥–∞—Ç—å —Å–ø–µ—Ü–∏–∞–ª—å–Ω—ã–π –ø—Ä–æ–µ–∫—Ç –≤ Simplicity Studio. –ï—Å–ª–∏ –∏—Å–ø–æ–ª—å–∑—É–µ—Ç—Å—è –¥–µ–º–æ-–ø–ª–∞—Ç–∞, —Ç–∞–∫–æ–π –ø—Ä–æ–µ–∫—Ç –º–æ–∂–Ω–æ –≤—ã–±—Ä–∞—Ç—å –≤ —Å–ø–∏—Å–∫–µ Software Examples, –∫–æ—Ç–æ—Ä—ã–π —Å—Ñ–æ—Ä–º–∏—Ä—É–µ—Ç—Å—è –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏ –ø—Ä–∏ –ø–æ–¥–∫–ª—é—á–µ–Ω–∏–∏ –µ—ë –∫ –∫–æ–º–ø—å—é—Ç–µ—Ä—É. –ü—Ä–∏ –æ—Ç—Å—É—Ç—Å—Ç–≤–∏–∏ –ø–ª–∞—Ç—ã –º–æ–∂–Ω–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –ø–æ–ª–µ My Products –≤ Simplicity IDE, –¥–æ–±–∞–≤–∏–≤ –≤ –Ω–µ–≥–æ BGM13P22F512GA –≤ –∫–∞—á–µ—Å—Ç–≤–µ Part. –ü—Ä–∏ —ç—Ç–æ–º —Ç–∞–∫–∂–µ —Å—Ñ–æ—Ä–º–∏—Ä—É–µ—Ç—Å—è —Å–ø–∏—Å–æ–∫ Gecko Bootloader Examples –≤ —Å–µ–∫—Ü–∏–∏ Software Example. –í —ç—Ç–æ–º —Å–ø–∏—Å–∫–µ –∏–º–µ–µ—Ç—Å—è –Ω–µ—Å–∫–æ–ª—å–∫–æ –ø—Ä–æ–µ–∫—Ç–æ–≤ –±—É—Ç–ª–æ–∞–¥–µ—Ä–∞ –¥–ª—è —Ä–∞–∑–Ω—ã—Ö —Å–∏—Ç—É–∞—Ü–∏–π. –ï—Å–ª–∏ –≤ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–µ –Ω–µ –ø—Ä–µ–¥–ø–æ–ª–∞–≥–∞–µ—Ç—Å—è –∑–∞–¥–µ–π—Å—Ç–≤–æ–≤–∞—Ç—å –≤–Ω–µ—à–Ω—é—é Flash –ø–∞–º—è—Ç—å –¥–ª—è OTA –∏ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–æ –±—É–¥–µ—Ç —Ä–∞–±–æ—Ç–∞—Ç—å —Ç–æ–ª—å–∫–æ —Å –æ–¥–Ω–∏–º –ø—Ä–æ—Ç–æ–∫–æ–ª–æ–º (–Ω–∞–ø—Ä–∏–º–µ—Ä, Bluetooth), –¥–ª—è —É–∫–∞–∑–∞–Ω–Ω–æ–≥–æ –º–æ–¥—É–ª—è –ø–æ–¥–æ–π–¥—ë—Ç –ø—Ä–æ–µ–∫—Ç, —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—â–∏–π –æ–±—ä—ë–º—É Flash –ø–∞–º—è—Ç–∏ –≤ –º–æ–¥—É–ª–µ, –ø–æ–∫–∞–∑–∞–Ω–Ω—ã–π –Ω–∏–∂–µ. –ü–æ—Å–ª–µ —Å–æ–∑–¥–∞–Ω–∏—è –ø—Ä–æ–µ–∫—Ç–∞ –æ—Ç–∫—Ä—ã–≤–∞–µ–º .isc —Ñ–∞–π–ª –≤ –µ–≥–æ –¥–µ—Ä–µ–≤–µ –∏, –Ω–µ –º–µ–Ω—è—è –¥–µ—Ñ–æ–ª—Ç–Ω—ã—Ö –Ω–∞—Å—Ç—Ä–æ–µ–∫, –∫–ª–∏–∫–∞–µ–º –Ω–∞ –∫–Ω–æ–ø–∫—É Generate. –≠—Ç–æ –ø—Ä–∏–≤–µ–¥—ë—Ç –∫ –∞–≤—Ç–æ–≥–µ–Ω–µ—Ä–∞—Ü–∏–∏ –∫–æ–¥–∞ –±—É—Ç–ª–æ–∞–¥–µ—Ä–∞, –ø–æ –æ–∫–æ–Ω—á–∞–Ω–∏–∏ –∫–æ—Ç–æ—Ä–æ–π –ø—Ä–æ–µ–∫—Ç —Å–ª–µ–¥—É–µ—Ç —Å–∫–æ–º–ø–∏–ª–∏—Ä–æ–≤–∞—Ç—å. –í–Ω–µ –∑–∞–≤–∏—Å–∏–º–æ—Å—Ç–∏ –æ—Ç —Ç–æ–≥–æ, —Ä–µ—à–∏–ª–∏-–ª–∏ –í—ã –æ–±–Ω–æ–≤–∏—Ç—å –±—É—Ç–ª–æ–∞–¥–µ—Ä –∏–ª–∏ –Ω–µ—Ç, —Å–ª–µ–¥—É—é—â–∏–º —à–∞–≥–æ–º —è–≤–ª—è–µ—Ç—Å—è –∑–∞–≥—Ä—É–∑–∫–∞ –∫–æ–¥–∞ –≤ –º–æ–¥—É–ª—å. –î–ª—è —ç—Ç–æ–≥–æ –º–æ–∂–Ω–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –∫–∞–∫ –æ—Ç–¥–µ–ª—å–Ω—ã–π J-Link –ø—Ä–æ–≥—Ä–∞–º–º–∞—Ç–æ—Ä, —Ç–∞–∫ –∏ –≤—Å—Ç—Ä–æ–µ–Ω–Ω—ã–π –≤ –¥–µ–º–æ-–ø–ª–∞—Ç—É. –í –ø–æ—Å–ª–µ–¥–Ω–µ–º —Å–ª—É—á–∞–µ —É–¥–æ–±–Ω–æ –≤–æ—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å—Å—è –ø–ª–∞—Ç–æ–π –∞–¥–∞–ø—Ç–µ—Ä–∞ SLSDA001A (MINI Simplicity Adapter) –∏ 10-–∂–∏–ª—å–Ω—ã–º –∫–∞–±–µ–ª–µ–º, –≤—Ö–æ–¥—è—â–∏–º –≤ –µ–≥–æ –∫–æ–º–ø–ª–µ–∫—Ç. –í—Å—Ç–∞–≤–∏–º –µ–≥–æ –≤ –æ—Å–Ω–æ–≤–Ω—É—é –ø–ª–∞—Ç—É, –∫–∞–∫ –ø–æ–∫–∞–∑–∞–Ω–æ –Ω–∏–∂–µ. –ù–∞ –¥—Ä—É–≥–æ–º –∫–æ–Ω—Ü–µ –∫–∞–±–µ–ª—è —Ç–∞–∫–∂–µ –∏–º–µ–µ—Ç—Å—è 10-—à—Ç—ã—Ä—å–∫–æ–≤—ã–π —Ä–∞–∑—ä—ë–º —Å —à–∞–≥–æ–º –≤—ã–≤–æ–¥–æ–≤ 1.27 –º–º. –Ø –∏—Å–ø–æ–ª—å–∑—É—é —Å–∞–º–æ–¥–µ–ª—å–Ω—ã–π –∞–¥–∞–ø—Ç–µ—Ä –¥–ª—è —Å–æ–µ–¥–∏–Ω–µ–Ω–∏—è –¥—Ä—É–≥–æ–≥–æ –∫–æ–Ω—Ü–∞ –∫–∞–±–µ–ª—è –ø—Ä–æ–≥—Ä–∞–º–º–∞—Ç–æ—Ä–∞ —Å –ø–ª–∞—Ç–æ–π –º–æ–¥—É–ª—è. –ü—Ä–∏ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏–∏ –ø—Ä–æ–≥—Ä–∞–º–º–∞—Ç–æ—Ä–∞ –Ω–∞ –¥–µ–º–æ-–ø–ª–∞—Ç–µ –µ–≥–æ —Å–ª–µ–¥—É–µ—Ç –ø–µ—Ä–µ–≤–µ—Å—Ç–∏ –≤ —Ä–µ–∂–∏–º OUT –¥–ª—è –ø—Ä–æ–≥—Ä–∞–º–º–∏—Ä–æ–≤–∞–Ω–∏—è –≤–Ω–µ—à–Ω–∏—Ö —É—Å—Ç—Ä–æ–π—Å—Ç–≤. –ü—Ä–∏ —ç—Ç–æ–º —Å–≤–µ—Ç–æ–¥–∏–æ–¥ —Å–ø—Ä–∞–≤–∞ –æ—Ç –ø–ª–∞—Ç—ã –∞–¥–∞–ø—Ç–µ—Ä–∞ –∑–∞–≥–æ—Ä–∞–µ—Ç—Å—è. –û–ø—Ä–µ–¥–µ–ª–∏–≤—à–∏—Å—å —Å –≤—ã–±–æ—Ä–æ–º –ø—Ä–æ–≥—Ä–∞–º–º–∞—Ç–æ—Ä–∞, —Å–ª–µ–¥—É–µ—Ç –Ω–∞—Å—Ç—Ä–æ–∏—Ç—å –µ–≥–æ –Ω–∞ —Ä–∞–±–æ—Ç—É —Å Bluetooth –º–æ–¥—É–ª–µ–º –≤ Studio. –î–ª—è —ç—Ç–æ–≥–æ –ø–µ—Ä–µ—Ö–æ–¥–∏–º –≤ —Ä–µ–∂–∏–º Launcher, –∫–ª–∏–∫–∞–µ–º –ø—Ä–∞–≤–æ–π –∫–Ω–æ–ø–∫–æ–π –º—ã—à–∏ –Ω–∞ –Ω–∞—à –ø—Ä–æ–≥—Ä–∞–º–º–∞—Ç–æ—Ä –≤ –æ–∫–Ω–µ Debug Adapters, –∏ –≤—ã–±–∏—Ä–∞–µ–º –æ–ø—Ü–∏—é Device Configuration. –ü—Ä–∏ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏–∏ –æ—Ç–ª–∞–¥–æ—á–Ω—ã—Ö –ø–ª–∞—Ç –≤—Å–µ–≥–æ —ç—Ç–æ–≥–æ –¥–µ–ª–∞—Ç—å –Ω–µ –Ω—É–∂–Ω–æ, –ø–æ—Ç–æ–º—É —á—Ç–æ –Ω–∞ –∫–∞–∂–¥–æ–π –∏–∑ –Ω–∏—Ö —É—Å—Ç–∞–Ω–æ–≤–ª–µ–Ω Flash —á–∏–ø —Å –∏–¥–µ–Ω—Ç–∏—Ñ–∏–∫–∞—Ç–æ—Ä–æ–º –º–æ–¥—É–ª—è. –ü–æ—Å–∫–æ–ª—å–∫—É –≤ –Ω–∞—à–µ–º —É—Å—Ç—Ä–æ–π—Å—Ç–≤–µ –Ω–∏—á–µ–≥–æ –ø–æ–¥–æ–±–Ω–æ–≥–æ –Ω–µ—Ç, —Å–ª–µ–¥—É–µ—Ç –≤ –ø–æ–ª–µ Target part –≤–≤–µ—Å—Ç–∏ –Ω–æ–º–µ–Ω–∫–ª–∞—Ç—É—Ä—É –º–æ–¥—É–ª—è, –∫–æ—Ç–æ—Ä–∞—è –∑–∞—Ç–µ–º –ø–æ—è–≤–∏—Ç—Å—è –ø–æ–¥ ID –∞–¥–∞–ø—Ç–µ—Ä–∞, –∫–∞–∫ –ø–æ–∫–∞–∑–∞–Ω–æ –≤—ã—à–µ. –û—Ç–º–µ—á—É, —á—Ç–æ –Ω–µ –Ω—É–∂–Ω–æ –∑–Ω–∞—Ç—å –∫–∞–∫–æ–π —á–∏–ø —Å–µ–º–µ–π—Å—Ç–≤–∞ EFR32 —É—Å—Ç–∞–Ω–æ–≤–ª–µ–Ω –≤ –º–æ–¥—É–ª–µ, –ø–æ—Å–∫–æ–ª—å–∫—É Studio —Ç—Ä–∞–∫—Ç—É–µ—Ç –∏–º—è –º–æ–¥—É–ª—è –∫–∞–∫ –æ—Ç–¥–µ–ª—å–Ω—É—é –¥–µ—Ç–∞–ª—å. –ü—Ä–∏ —É—Å–ø–µ—à–Ω–æ–π –∫–æ–º–ø–∏–ª—è—Ü–∏–∏ –±—É—Ç–ª–æ–∞–¥–µ—Ä–∞ –≤ –µ–≥–æ –¥–µ—Ä–µ–≤–µ –ø—Ä–æ–µ–∫—Ç–∞ –ø–æ—è–≤–∏—Ç—Å—è –ø–∞–ø–∫–∞ Binaries. –û—Ç–∫—Ä–æ–µ–º –µ—ë –∏ –∫–ª–∏–∫–Ω–µ–º –ø—Ä–∞–≤–æ–π –∫–Ω–æ–ø–∫–æ–π –º—ã—à–∏ –Ω–∞ .hex —Ñ–∞–π–ª –≤ –Ω–µ–π. –í –æ—Ç–∫—Ä—ã–≤—à–µ–º—Å—è –æ–∫–Ω–µ –≤—ã–±–µ—Ä–µ–º –æ–ø—Ü–∏—é Flash to Device —Å –¥–µ—Ñ–æ–ª—Ç–Ω—ã–º–∏ –Ω–∞—Å—Ç—Ä–æ–π–∫–∞–º–∏. –ù–∞–∫–æ–Ω–µ—Ü, –±—É—Ç–ª–æ–∞–¥–µ—Ä –∑–∞–≥—Ä—É–∂–µ–Ω –∏ —Å—Ä–µ–¥–∞ –Ω–∞—Å—Ç—Ä–æ–µ–Ω–∞ –Ω–∞ –ø—Ä–æ–≥—Ä–∞–º–º–∏—Ä–æ–≤–∞–Ω–∏–µ –º–æ–¥—É–ª—è. –¢–µ–ø–µ—Ä—å —Å–∞–º–æ–µ –≤—Ä–µ–º—è –ø—Ä–æ–∏–∑–≤–µ—Å—Ç–∏ –º–∏–Ω–∏–º–∞–ª—å–Ω—ã–µ –∏–∑–º–µ–Ω–µ–Ω–∏—è –≤ –ø—Ä–æ–µ–∫—Ç–µ, —Å–æ–≥–ª–∞—Å–Ω–æ –ø—Ä–∏–Ω—Ü–∏–ø–∏–∞–ª—å–Ω–æ–π —Å—Ö–µ–º–µ. –¢–∞–∫, –≤ —Ñ–∞–π–ª–µ main.c –∑–∞–∫–æ–º–º–µ–Ω—Ç–∏—Ä—É–µ–º —Å—Ç—Ä–æ–∫—É 136 —Å –≤—ã—Å–æ–≤–æ–º —Ñ—É–Ω–∫—Ü–∏–∏ initApp(), –∞ –≤ –∫–æ–Ω—Ü–µ —Ñ–∞–π–ª–∞ init_board.c –∑–∞–∫–æ–º–º–µ–Ω—Ç–∏—Ä—É–µ–º –≤—Å–µ —Å—Ç—Ä–æ–∫–∏, –Ω–∞—á–∏–Ω–∞—é—â–∏–µ—Å—è —Å MX25. –û–Ω–∏ –Ω–µ –Ω—É–∂–Ω—ã, —Ç.–∫. –≤ –Ω–∞—à–µ–º —É—Å—Ç—Ä–æ–π—Å—Ç–≤–µ –Ω–µ—Ç –æ—Ç–¥–µ–ª—å–Ω–æ–π flash –ø–∞–º—è—Ç–∏ –¥–ª—è –æ—Ä–≥–∞–Ω–∏–∑–∞—Ü–∏–∏ –û–¢–ê. –û—Å—Ç–∞–ª–æ—Å—å –ø–µ—Ä–µ–Ω–∞–∑–Ω–∞—á–∏—Ç—å –≤—ã–≤–æ–¥—ã –º–æ–¥—É–ª—è –ø–æ–¥ —Å–≤–µ—Ç–æ–¥–∏–æ–¥—ã –≤ —Ñ–∞–π–ª–µ hal-config-board.h –∏ —É—Å—Ç–∞–Ω–æ–≤–∏—Ç—å HAL_PTI_ENABLE –≤ 0 –≤ —Ñ–∞–π–ª–µ hal-config-app-common.h. –í—Å–µ —É–∫–∞–∑–∞–Ω–Ω—ã–µ –∏–∑–º–µ–Ω–µ–Ω–∏—è —Å–¥–µ–ª–∞–Ω—ã –≤ –ø—Ä–∏–ª–∞–≥–∞–µ–º–æ–º –∞—Ä—Ö–∏–≤–µ –ø—Ä–æ–µ–∫—Ç–∞ Server_RTOS_MOD. –°–ª–µ–¥—É–µ—Ç –æ—Ç–º–µ—Ç–∏—Ç—å, —á—Ç–æ –¥–µ–º–æ-–ø–ª–∞—Ç—É –º–æ–∂–Ω–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å —Ç–∞–∫–∂–µ –¥–ª—è –∏–∑–º–µ—Ä–µ–Ω–∏—è –ø–æ—Ç—Ä–µ–±–ª—è–µ–º–æ–≥–æ —Ç–æ–∫–∞ –Ω–∞—à–∏–º —É—Å—Ç—Ä–æ–π—Å—Ç–≤–æ–º –∏–Ω—Å—Ç—Ä—É–º–µ–Ω—Ç–æ–º Energy Profiler —á–µ—Ä–µ–∑ MINI Simplicity –∞–¥–∞–ø—Ç–µ—Ä –≤ —Ä–µ–∂–∏–º–µ OUT. –ö–∞–∫ –ø–æ–∫–∞–∑—ã–≤–∞–µ—Ç –æ—Å—Ü–∏–ª–ª–æ–≥—Ä–∞–º–º–∞ –Ω–∏–∂–µ, —Å—Ä–µ–¥–Ω–µ–µ –ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ –Ω–∞—à–µ–≥–æ —Å–µ—Ä–≤–µ—Ä–∞ –ø–æ–ª–Ω–æ—Å—Ç—å—é —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É–µ—Ç –æ–∂–∏–¥–∞–µ–º–æ–º—É, –∏ –Ω–∞—Ö–æ–¥–∏—Ç—Å—è –≤ —Ä–∞–π–æ–Ω–µ 25 –º–∫–ê. –õ–∏—Ç–µ—Ä–∞—Ç—É—Ä–∞ 1. –û —Ä–∞–∑—Ä–∞–±–æ—Ç–∫–µ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–π –¥–ª—è ARM –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–æ–≤ —Ñ–∏—Ä–º—ã Silicon Labs –ø–æ–¥ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ–º Micriµm OS.
–§–∞–π–ª—ã: –í—Å–µ –≤–æ–ø—Ä–æ—Å—ã –≤ –§–æ—Ä—É–º.
–≠—Ç–∏ —Å—Ç–∞—Ç—å–∏ –≤–∞–º —Ç–æ–∂–µ –º–æ–≥—É—Ç –ø—Ä–∏–≥–æ–¥–∏—Ç—å—Å—è: |
|
||||||||||||
 |
 |


 |
||||

|
||||


























–Ý–∞–±–æ—Ç–æ—Å–ø–æ—Å–æ–±–Ω–æ—Å—Ç—å —Å–∞–π—Ç–∞ –ø—Ä–æ–≤–µ—Ä–µ–Ω–∞ –≤ –±—Ä–∞—É–∑–µ—Ä–∞—Ö:
IE8.0, Opera 9.0, Netscape Navigator 7.0, Mozilla Firefox 5.0
–ê–¥–∞–ø—Ç–∏—Ä–æ–≤–∞–Ω –¥–ª—è —Ä–∞–±–æ—Ç—ã –ø—Ä–∏ —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è—Ö —ç–∫—Ä–∞–Ω–∞ –æ—Ç 1280—Ö1024 –∏ –≤—ã—à–µ.
–ü—Ä–∏ –º–µ–Ω—å—à–∏—Ö —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è—Ö –≤–æ–∑–º–æ–∂–Ω–æ –ø–æ—è–≤–ª–µ–Ω–∏–µ –≥–æ—Ä–∏–∑–æ–Ω—Ç–∞–ª—å–Ω–æ–π –ø—Ä–æ–∫—Ä—É—Ç–∫–∏.
–ü–æ –≤—Å–µ–º –≤–æ–ø—Ä–æ—Å–∞–º –æ–±—Ä–∞—â–∞–π—Ç–µ—Å—å –∫ –ö–æ—Ç—É: kot@radiokot.ru
©2005-2026