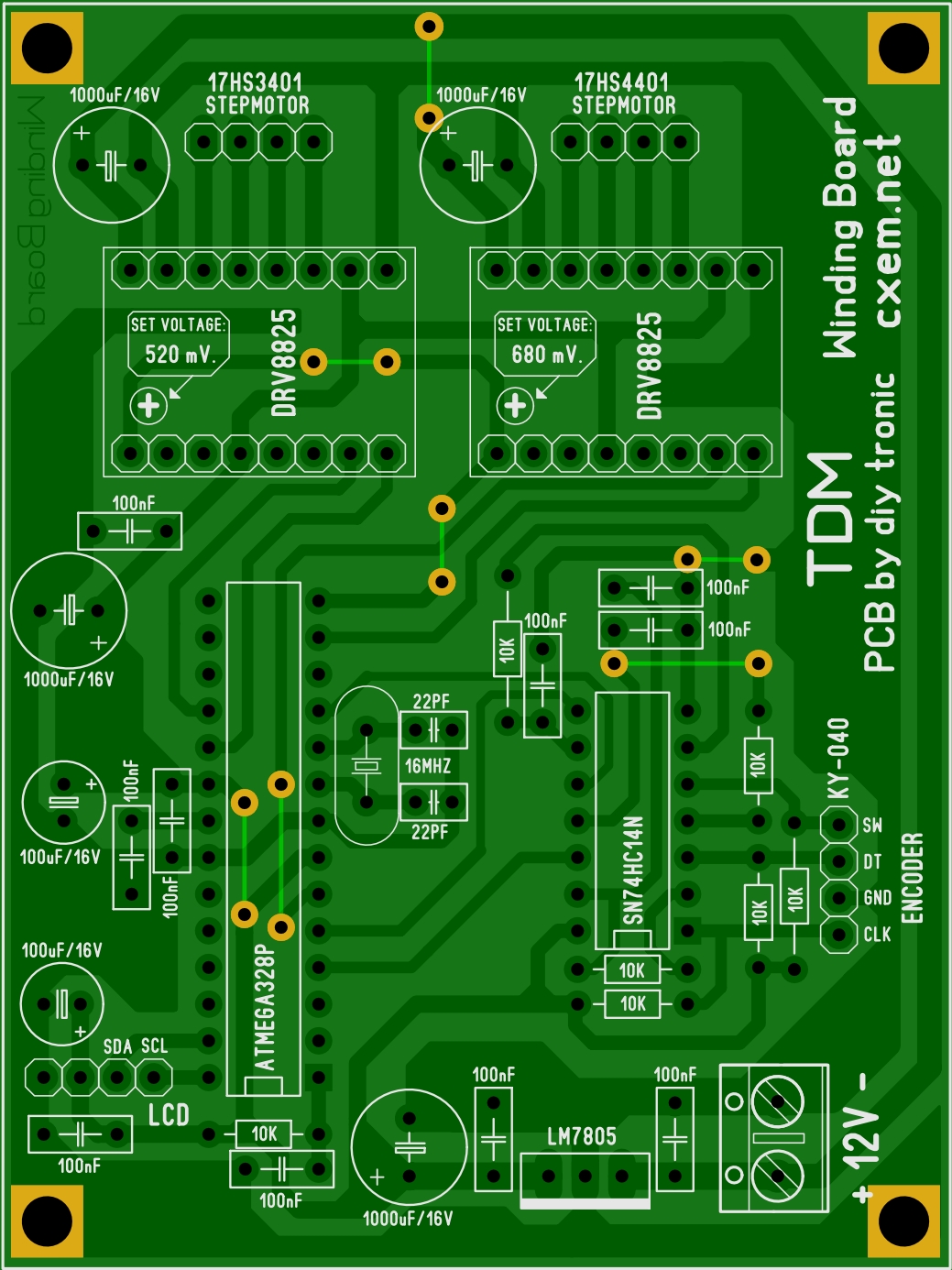
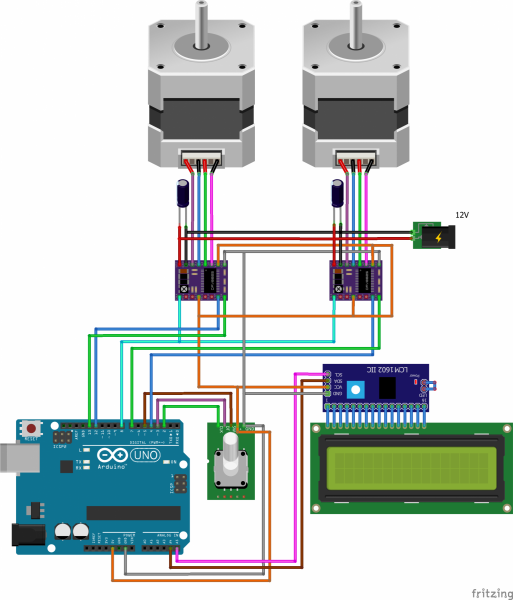
Уважаемые форумчане, прошу оценить идею и реализацию намоточного приспособления на базе контроллера ATmega328.
Сейчас думаю что улучшить в этом проекте.
Электроника в целом устраивает, хотя если есть дельные предложения то слушаю.
Механика требует доработки в плане перехода на типовые узлы типа муфты, резьбовые валы и т.д.
То есть стандартные детали которые применяются в 3D принтерах и различных дешевых ЧПУ.
Цель повысить надежность и уменьшить влияние сборки.
Код требует доработки в плане понятности, а так же есть моменты по управлению ШД через прерывания которые мне не нравятся.
Возможно кто скажет как такое управление реализуется в 3Д принтерах, граверах и т.д.
В целом интересны все Ваши предложения и замечания.
Сейчас думаю что улучшить в этом проекте.
Электроника в целом устраивает, хотя если есть дельные предложения то слушаю.
Механика требует доработки в плане перехода на типовые узлы типа муфты, резьбовые валы и т.д.
То есть стандартные детали которые применяются в 3D принтерах и различных дешевых ЧПУ.
Цель повысить надежность и уменьшить влияние сборки.
Код требует доработки в плане понятности, а так же есть моменты по управлению ШД через прерывания которые мне не нравятся.
Возможно кто скажет как такое управление реализуется в 3Д принтерах, граверах и т.д.
В целом интересны все Ваши предложения и замечания.
Код: Выделить всё
/* Name: Winding machine
Description: Arduino ATmega 328P + Stepper motor control CNC Shield v3 DRV8825 + 1602 LCD I2C menu + Encoder KY-040
Author: TDA
Ver: 1.0
Date: 07/07/2018
Arduino pinout diagram:
_______________
| USB |
| AREF|
| GND|
| 13| DIR A
|RESET 12| STEP A
|3V3 #11|
|5V #10|
|GND #9|
|VIN 8| EN STEP
| |
| 7| DIR Z
| #6|
|A0 #5| ENCODER DT
|A1 4| STEP Z
|A2 INT1 #3| ENCODER SW
|A3 INT0 2| ENCODER CLK
I2C LCD |A4 SDA TX 1|
I2C LCD |A5 SCL RX 0|
|_______________|
*/
#include <avr/io.h>
#include <avr/interrupt.h>
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#define ENC_CLK 2 // Деректива #define дает имя константе
#define ENC_SW 3
#define STEP_Z 4
#define ENC_DT 5
#define DIR_Z 7
#define EN_STEP 8
#define STEP_A 12
#define DIR_A 13
byte up[8] = {0b00100,0b01110,0b11111,0b00000,0b00000,0b00000,0b00000,0b00000}; // Свой символ ⯅
byte down[8] = {0b00000,0b00000,0b00000,0b00000,0b00000,0b11111,0b01110,0b00100}; // Свой символ ⯆
volatile int Encoder_Dir; // Направление вращения энкодера
volatile boolean Push_Button, Var_Set, DC, AutoWindStart; // Нажатие кнопки; режим установки значения; формирование сигнала STEP; работает подпрограмма автонамотки
volatile boolean Pause; // Флаг паузы в режиме автонамотка
volatile int i; // Счетчик кол-ва заходов в прерывание таймера
char Str_Buffer[22]; // Буфер для функции sprintf
byte LCD_Column, LCD_Row, Symbol_Code, Motor_Num; // Номер столбца и строки LCD; код символа https://i.stack.imgur.com/oZhjJ.gif; номер шагового двигателя
long int ActualShaftPos, ActualLayerPos; // Текущие позиции двигателей вала и укладчика
int Actual_Turn = 0, Actual_Layer = 0; // Текущий виток и слой при автонамотке
int Shaft_Pos, Lay_Pos, Set_Turns, Set_Step, Set_Speed=1, Set_Layers, Step_Mult=1; // Переменные изменяемые на экране
byte Menu_Index = 0; // Переменная хранит номер текущей строки меню
enum menu_states {Autowinding, PosControl, TurnsSet, StepSet, SpeedSet, LaySet, Start, Cancel, ShaftPos, LayPos, StepMul, PosCancel}; // Нумерованный список строк экрана
struct MenuType { // Структура описывающая меню
byte Screen; // Индекс экрана
byte string_number; // Номер строки на экране
char format[22]; // Формат строки
char format_Set_var[6]; // Формат значения при вводе переменной
int *param; // Указатель на адрес текущей переменной изменяемой на экране
int var_Min; // Ограничение значения переменной снизу
int var_Max; // Ограничение значения переменной сверху
byte param_coef;}; // Размерный коэффициент значения переменной
const struct MenuType Menu[] = { // Объявляем переменную Menu пользовательского типа MenuType и доступную только для чтения
{0, 0, " AUTOWINDING ", "" ,NULL, 0, 0, 0 }, // "> AUTOWINDING "
{0, 1, " POS CONTROL ", "" ,NULL, 0, 0, 0 }, // "> POS CONTROL "
{2, 0, " TURNS: %03d ", "%03d" ,&Set_Turns, 1, 999, 1 }, // "> TURNS: >000< "
{2, 1, " STEP: 0.%04d ", "%04d" ,&Set_Step, 1, 200, 35}, // "> STEP:>0.0000<↓"
{4, 0, " SPEED: %03d ", "%03d" ,&Set_Speed, 1, 100, 1 }, // "> SPEED: >000< ↑"
{4, 1, " LAYERS: %02d ", "%02d" ,&Set_Layers, 1, 99, 1 }, // "> LAYERS:>00< ↓"
{6, 0, " START ", "" ,NULL, 0, 0, 0 }, // "> START ↑"
{6, 1, " CANCEL ", "" ,NULL, 0, 0, 0 }, // "> CANCEL "
{8, 0, " SH POS: %+04d ", "%+04d" ,&Shaft_Pos, -200, 200, 1 }, // "> SH POS:>±000< "
{8, 1, " LA POS: %+04d ", "%+04d" ,&Lay_Pos, -999, 999, 1 }, // "> LA POS:>±000<↓"
{10, 0, " STPMUL: %03d ", "%03d" ,&Step_Mult, 1, 100, 1 }, // "> STPMUL:>000< ↑"
{10, 1, " CANCEL ", "" ,NULL, 0, 0, 0 }, // "> CANCEL "
{12, 0, "T%03d/%03d L%02d/%02d", "" ,NULL, 0, 0, 0 }, // "T000/000 L00/00 "
{12, 1, "SP%03d ST0.%04d ", "" ,NULL, 0, 0, 0 }, // "SP000 ST0.0000 "
{14, 0, "AUTOWINDING DONE ", "" ,NULL, 0, 0, 0 }, // "AUTOWINDING DONE"
{14, 1, "PRESS CONTINUE ", "" ,NULL, 0, 0, 0 }}; // "PRESS CONTINUE "
LiquidCrystal_I2C lcd(0x3F,16,2); // 0x3F I2C адрес для PCF8574AT, дисплей 16 символов 2 строки
void setup() {
pinMode(ENC_CLK, INPUT); // Инициализация входов/выходов
pinMode(ENC_SW, INPUT);
pinMode(STEP_Z, OUTPUT);
pinMode(ENC_DT, INPUT);
pinMode(DIR_Z, OUTPUT);
pinMode(EN_STEP, OUTPUT);
pinMode(STEP_A, OUTPUT);
pinMode(DIR_A, OUTPUT);
digitalWrite(EN_STEP, HIGH); // Запрет управления двигателями
lcd.init(); // Инициализация LCD
lcd.backlight(); // Включение подсветки LCD
lcd.createChar(0, up); // Записываем символ ⯅ в память LCD
lcd.createChar(1, down); // Записываем символ ⯆ в память LCD
cli(); // Глобальный запрет прерываний
EICRA = (1<<ISC11)|(0<<ISC10)|(0<<ISC01)|(1<<ISC00); // Настройка срабатывания прерываний: INT0 по изменению сигнала, INT1 по спаду сигнала; ATmega328/P DATASHEET стр.89
EIMSK = (1<<INT0)|(1<<INT1); // Разрешение прерываний INT0 и INT1; ATmega328/P DATASHEET стр.90
EIFR = 0x00; // Сбрасываем флаги внешних прерываний; ATmega328/P DATASHEET стр.91
TCCR1A=(0<<COM1A1)|(0<<COM1B1)|(0<<COM1A0)|(0<<COM1B0)|(0<<WGM11)|(0<<WGM10); // Настройка таймера/счетчика 1: нормальный режим работы порта, OC1A/OC1B отключены; ATmega328/P DATASHEET стр.170-172
TCCR1B=(0<<WGM13)|(1<<WGM12)|(0<<CS12)|(0<<CS11)|(1<<CS10); // Режим работы таймера/счетчика - CTC (очистить таймер при достижении значения в регистре сравнения OCR1A)
OCR1A = 1000; // Значение в регистре OCR1A определяет частоту входа в прерывание таймера и устанавливает скрость вращения двигателей
sei(); // Глобальное разрешение прерываний
lcd.clear();
sprintf(Str_Buffer, Menu[0].format);
lcd.print(Str_Buffer); // Выводим первую строку на экран
lcd.setCursor(0,1);
sprintf(Str_Buffer, Menu[1].format);
lcd.print(Str_Buffer); // Выводим вторую строку на экран
PrintSymbol(0,0,0x3E);} // Выводим символ ">" на 0,0 LCD
void loop() {
if (Encoder_Dir != 0) { // Проверяем изменение позиции энкодера
switch (Menu_Index) { // Если позиция энкодера изменена то меняем Menu_Index и выводим экран
case Autowinding: Menu_Index = constrain(Menu_Index + Encoder_Dir, Autowinding, PosControl); break;
case PosControl: Menu_Index = constrain(Menu_Index + Encoder_Dir, Autowinding, PosControl); break;
case TurnsSet: Menu_Index = constrain(Menu_Index + Encoder_Dir, TurnsSet, Cancel); break;
case StepSet: Menu_Index = constrain(Menu_Index + Encoder_Dir, TurnsSet, Cancel); break;
case SpeedSet: Menu_Index = constrain(Menu_Index + Encoder_Dir, TurnsSet, Cancel); break;
case LaySet: Menu_Index = constrain(Menu_Index + Encoder_Dir, TurnsSet, Cancel); break;
case Start: Menu_Index = constrain(Menu_Index + Encoder_Dir, TurnsSet, Cancel); break;
case Cancel: Menu_Index = constrain(Menu_Index + Encoder_Dir, TurnsSet, Cancel); break;
case ShaftPos: Menu_Index = constrain(Menu_Index + Encoder_Dir, ShaftPos, PosCancel); break;
case LayPos: Menu_Index = constrain(Menu_Index + Encoder_Dir, ShaftPos, PosCancel); break;
case StepMul: Menu_Index = constrain(Menu_Index + Encoder_Dir, ShaftPos, PosCancel); break;
case PosCancel: Menu_Index = constrain(Menu_Index + Encoder_Dir, ShaftPos, PosCancel); break;}
Encoder_Dir = 0; PrintScreen();}
if (Push_Button == true) { // Проверяем нажатие кнопки
switch (Menu_Index) { // Если было нажатие то выполняем действие соответствующее текущей позиции курсора
case Autowinding: Menu_Index = TurnsSet; break;
case PosControl: Menu_Index = ShaftPos; break;
case TurnsSet: SetQuote(9,13); Push_Button=false; Var_Set=true; while(!Push_Button){Set_Var();} Var_Set=false; ClearQuote(9,13); break;
case StepSet: SetQuote(7,14); Push_Button=false; Var_Set=true; while(!Push_Button){Set_Var();} Var_Set=false; ClearQuote(7,14); break;
case SpeedSet: SetQuote(9,13); Push_Button=false; Var_Set=true; while(!Push_Button){Set_Var();} Var_Set=false; ClearQuote(9,13); break;
case LaySet: SetQuote(9,12); Push_Button=false; Var_Set=true; while(!Push_Button){Set_Var();} Var_Set=false; ClearQuote(9,12); break;
case Start: Push_Button = false; AutoWindStart = true; AutoWindingPrg(); AutoWindStart = false; break;
case Cancel: Menu_Index = Autowinding; break;
case ShaftPos: SetQuote(9,14); Push_Button=false; Var_Set=true; digitalWrite(EN_STEP, LOW); Motor_Num = 1;
while(!Push_Button){Set_Var(); ActualShaftPos=MotorMove(*Menu[Menu_Index].param, ActualShaftPos);}
Var_Set=false; digitalWrite(EN_STEP, HIGH); ClearQuote(9,14); break;
case LayPos: SetQuote(9,14); Push_Button=false; Var_Set=true; digitalWrite(EN_STEP, LOW); Motor_Num = 2;
while(!Push_Button){Set_Var(); ActualLayerPos=MotorMove(*Menu[Menu_Index].param, ActualLayerPos);}
Var_Set=false; digitalWrite(EN_STEP, HIGH); ClearQuote(9,14); break;
case StepMul: SetQuote(9,13);Push_Button=false;Var_Set=true; while(!Push_Button){Set_Var();} Var_Set=false; ClearQuote(9,13); break;
case PosCancel: Menu_Index = Autowinding; Shaft_Pos = 0; Lay_Pos = 0; Step_Mult = 1; ActualShaftPos = 0; ActualLayerPos = 0; break;}
Push_Button = false; PrintScreen();}}
ISR(INT0_vect) { // Вектор прерывания от энкодера
byte Enc_Temp; // Временная переменная для хранения состояния порта
Enc_Temp = PIND & 0b00100100; // Маскируем все пины порта D кроме PD2 и PD5
if (Enc_Temp == 0b00000100 || Enc_Temp == 0b00100000) {Encoder_Dir = 1;} // +1 - шаг по часовой
else if (Enc_Temp == 0b00000000 || Enc_Temp == 0b00100100) {Encoder_Dir = -1;} // -1 - шаг против часовой
else {Encoder_Dir = 0; return;} // Если случайно(?!) вошли в прерывание то выходим
if (Var_Set == true && Encoder_Dir != 0) { // Если находимся в режиме изменения переменной
*Menu[Menu_Index].param += Encoder_Dir; Encoder_Dir = 0; // то меняем ее сразу и
*Menu[Menu_Index].param = constrain(*Menu[Menu_Index].param, Menu[Menu_Index].var_Min, Menu[Menu_Index].var_Max);} // ограничиваем в диапазоне var_Min ÷ var_Max
if (AutoWindStart == true && Encoder_Dir != 0) {Set_Speed = constrain(Set_Speed + Encoder_Dir, 1, 100);}} // Если повернуть энкодер во время автонамотки
// то меняем значение скорости
ISR(INT1_vect){ // Вектор прерывания от кнопки энкодера
Push_Button = true;
if (AutoWindStart == true) {Pause = true;} // Если нажать кнопку энкодера во время автонамотки то выставляем флаг паузы
else return;}
ISR(TIMER1_COMPA_vect) { // Вектор прерывания от таймера/счетчика 1
i++; // Счетчик кол-ва заходов в прерывание
DC =! DC; // Первое прерывание устанавливает STEP следующее - сбрасывает
if (Motor_Num == 1) {
if (DC == true) {PORTD |= 0b00010000;} // STEP_Z
else {PORTD &= 0b11101111;}}
else if (Motor_Num == 2) {
if (DC == true) {PORTB |= 0b00010000;} // STEP_A
else {PORTB &= 0b11101111;}}}
void PrintScreen() { // Подпрограмма: Выводим экран на LCD
static byte Prev_Screen;
if (Menu[Menu_Index].Screen != Prev_Screen) {
lcd.clear();
sprintf(Str_Buffer, Menu[Menu[Menu_Index].Screen].format, *Menu[Menu[Menu_Index].Screen].param * Menu[Menu[Menu_Index].Screen].param_coef);
lcd.print(Str_Buffer);
lcd.setCursor(0, 1);
sprintf(Str_Buffer, Menu[Menu[Menu_Index].Screen + 1].format, *Menu[Menu[Menu_Index].Screen + 1].param * Menu[Menu[Menu_Index].Screen + 1].param_coef);
lcd.print(Str_Buffer);
Prev_Screen = Menu[Menu_Index].Screen;}
if (Menu_Index & 1) {PrintSymbol(0,1,0x3E); PrintSymbol(0,0,0x20);} // Если индекс меню нечетный выводим курсор на вторую строку
else {PrintSymbol(0,0,0x3E); PrintSymbol(0,1,0x20);} // Иначе выводим курсор на первую строку
switch (Menu_Index) { // Выводим стрелки ⯅⯆ на соответствующих строках меню
case TurnsSet: PrintSymbol(15,1,1); break;
case StepSet: PrintSymbol(15,1,1); break;
case SpeedSet: PrintSymbol(15,1,1); PrintSymbol(15,0,0); break;
case LaySet: PrintSymbol(15,1,1); PrintSymbol(15,0,0); break;
case Start: PrintSymbol(15,0,0); break;
case Cancel: PrintSymbol(15,0,0); break;
case ShaftPos: PrintSymbol(15,1,1); break;
case LayPos: PrintSymbol(15,1,1); break;
case StepMul: PrintSymbol(15,0,0); break;
case PosCancel: PrintSymbol(15,0,0); break;}}
void PrintSymbol(byte LCD_Column, byte LCD_Row, byte Symbol_Code) { // Подпрограмма: Выводим символ на экран
lcd.setCursor(LCD_Column, LCD_Row);
lcd.write(byte(Symbol_Code));}
void SetQuote (int First_Cur, int Second_Cur) { // Подпрограмма: Выводим выделение изменяемой переменной на LCD
PrintSymbol(First_Cur, Menu[Menu_Index].string_number,0x3E); // Выводим символ >
PrintSymbol(Second_Cur, Menu[Menu_Index].string_number,0x3C); // Выводим символ <
PrintSymbol(0, Menu[Menu_Index].string_number,0x20);} // Стираем основной курсор
void ClearQuote (int First_Cur, int Second_Cur) { // Подпрограмма: Стираем выделение изменяемой переменной на LCD
PrintSymbol(First_Cur, Menu[Menu_Index].string_number,0x20); // Стираем символ >
PrintSymbol(Second_Cur, Menu[Menu_Index].string_number,0x20); // Стираем символ <
PrintSymbol(0, Menu[Menu_Index].string_number,0x3E);} // Выводим основной курсор
void Set_Var() { // Подпрограмма: Выводим новое значение переменной на LCD
static int Previous_Param;
if (*Menu[Menu_Index].param != Previous_Param){
lcd.setCursor(10, Menu[Menu_Index].string_number);
sprintf(Str_Buffer, Menu[Menu_Index].format_Set_var, *Menu[Menu_Index].param * Menu[Menu_Index].param_coef);
lcd.print(Str_Buffer);
Previous_Param = *Menu[Menu_Index].param;}}
int MotorMove(int Move_Var, long Actual_Rot) { // Подпрограмма: Движение шагового двигателя до заданной координаты
long Rotation;
Rotation = Move_Var * Step_Mult - Actual_Rot;
switch(Motor_Num) {
case 1: if (Rotation > 0) {PORTD |= 0b10000000; TCNT1=0; TIMSK1=2; while(i<32){} TIMSK1=0; TCNT1=0; Actual_Rot++; i=0; DC=false;}
else if (Rotation < 0) {PORTD &= 0b01111111; TCNT1=0; TIMSK1=2; while(i<32){} TIMSK1=0; TCNT1=0; Actual_Rot--; i=0; DC=false;}
else TIMSK1 = 0; i = 0; DC = false; break;
case 2: if (Rotation > 0) {PORTB |= 0b00100000; TCNT1=0; TIMSK1=2; while(i<32){} TIMSK1=0; TCNT1=0; Actual_Rot++; i=0; DC=false;}
else if (Rotation < 0) {PORTB &= 0b11011111; TCNT1=0; TIMSK1=2; while(i<32){} TIMSK1=0; TCNT1=0; Actual_Rot--; i=0; DC=false;}
else TIMSK1 = 0; i = 0; DC = false; break;}
return Actual_Rot;}
void MotorStep(int StepQuant, int Dir) { // Подпрограмма: Движение шагового двигателя на заданное число шагов
int Temp_Step = 0;
switch(Motor_Num) {
case 1: if (Dir == 1) {PORTD |= 0b10000000;}
else if (Dir == -1) {PORTD &= 0b01111111;}
case 2: if (Dir == 1) {PORTB |= 0b00100000;}
else if (Dir == -1) {PORTB &= 0b11011111;}}
while (Temp_Step < StepQuant) {i=0; TCNT1=0; TIMSK1=2; while(i<32){} TIMSK1=0; TCNT1=0; DC=false; Temp_Step++;
if (Encoder_Dir != 0) {sprintf(Str_Buffer, "%03d", Set_Speed); lcd.setCursor(2,1); lcd.print(Str_Buffer);
Encoder_Dir=0; OCR1A = 32767/Set_Speed;}}}
void AutoWindingPrg() { // Подпрограмма автоматической намотки
int Dir = 1;
digitalWrite(EN_STEP, LOW); // Разрешение управления двигателями
OCR1A = 32767/Set_Speed; // Записью в OCR1A устанавливаем скорость вращения двигателей
PrintWendingScreen();
while (Actual_Layer < Set_Layers) // Пока текущее кол-во слоев меньше заданного проверяем сколько сейчас витков
{
while (Actual_Turn < Set_Turns) // Пока текущее кол-во витков меньше заданного продолжаем мотать
{
Motor_Num = 1; MotorStep(200, Dir);
Motor_Num = 2; MotorStep(Set_Step, Dir);
Actual_Turn++;
sprintf(Str_Buffer, "%03d", Actual_Turn);
lcd.setCursor(1, 0);
lcd.print(Str_Buffer);
if (Pause == true) // Проверяем не нужно ли сделать паузу
{
Push_Button = false;
Pause = false;
lcd.setCursor(0, 1);
sprintf(Str_Buffer, Menu[15].format); // "PRESS CONTINUE "
lcd.print(Str_Buffer);
while (Push_Button == false){}
lcd.setCursor(0, 1);
sprintf(Str_Buffer, Menu[13].format, Set_Speed, Set_Step*35); // "SPXXX ST0.XXXX "
lcd.print(Str_Buffer);
Push_Button = false;
Pause = false;
}
}
Actual_Layer++;
Actual_Turn = 0;
lcd.setCursor(10, 0);
sprintf(Str_Buffer, "%02d", Actual_Layer);
lcd.print(Str_Buffer);
if (Actual_Layer == Set_Layers) continue;
lcd.setCursor(0, 1);
sprintf(Str_Buffer, Menu[15].format); // "PRESS CONTINUE "
lcd.print(Str_Buffer);
while (Push_Button == false) {}
Push_Button = false;
Pause = false;
if (Dir == 1) Dir = -1;
else if (Dir == -1) Dir = 1;
PrintWendingScreen();
}
lcd.setCursor(0, 1);
sprintf(Str_Buffer, Menu[14].format); // "AUTOWINDING DONE"
lcd.print(Str_Buffer);
digitalWrite(EN_STEP, HIGH);
while (Push_Button == false) {}
Push_Button = false;
Pause = false;
Menu_Index = Autowinding;
Actual_Layer = 0;
}
void PrintWendingScreen() { // Подпрограмма вывода экрана автонамотки
lcd.clear();
sprintf(Str_Buffer, Menu[12].format, Actual_Turn, Set_Turns, Actual_Layer, Set_Layers);
lcd.print(Str_Buffer);
lcd.setCursor(0, 1);
sprintf(Str_Buffer, Menu[13].format, Set_Speed, Set_Step*35);
lcd.print(Str_Buffer); }