А если работают два таймера, и оба могут сработать одновременно, или почти одновременно? pic16f648 TMR1 TMR2 в режиме таймеров, то есть считают до конца (TMR1 до FFFF, TMR2 до совпадения с PR2). Оба закончили в один момент. 1) Инициируется прерывание. В обработчике всё равно определится, что один пойдёт первым.
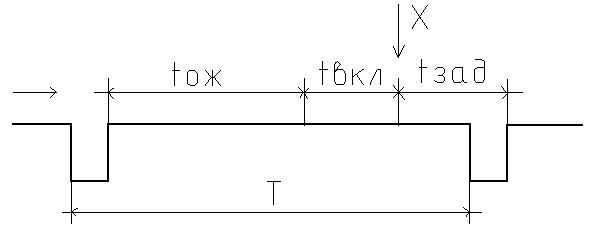
Сброс GIE
Определение сработавшего таймера, например TMRx
ОБработка TMRx
Взвод GIE
Что будет со вторым? TMR1 продолжает от нуля, (или TMR2 дальше PR2 шпарит), флаг прерывания поднят, снова тут же прерывание? Или надо сразу в одной процедуре оба обрабатывать? А если второе чуть позже, можно ли потерять прерывание?
2) Или влетели мы в прерывание по одному таймеру, и не запрещать GIE, обработка прервётся другим, а потом вернётся к первой?
3) Или влетели мы в прерывание по одному таймеру, запрет GIE, обрабатываем, и тут сработал второй. Взвод GIE, второе прерывание, а таймер-то ушагал уже.
Так? Или что не так?
В общем, как быть, если есть риск одновременного или близкого срабатывания таймеров по прерыванию?
Сброс GIE
Определение сработавшего таймера, например TMRx
ОБработка TMRx
Взвод GIE
Что будет со вторым? TMR1 продолжает от нуля, (или TMR2 дальше PR2 шпарит), флаг прерывания поднят, снова тут же прерывание? Или надо сразу в одной процедуре оба обрабатывать? А если второе чуть позже, можно ли потерять прерывание?
2) Или влетели мы в прерывание по одному таймеру, и не запрещать GIE, обработка прервётся другим, а потом вернётся к первой?
3) Или влетели мы в прерывание по одному таймеру, запрет GIE, обрабатываем, и тут сработал второй. Взвод GIE, второе прерывание, а таймер-то ушагал уже.
Так? Или что не так?
В общем, как быть, если есть риск одновременного или близкого срабатывания таймеров по прерыванию?