 |
 |
|||||||||||||||||||||||||
ą¦ą░čüčŗ-ą┐čĆąŠą┐ąĄą╗ą╗ąĄčĆ ą┐ąŠ-čĆčāčüčüą║ąĖ
ąÉą▓č鹊čĆ: Marcus ą¤čĆąĖą▓ąĄčé, ąĀą░ą┤ąĖąŠą║ąŠčé! ą¤ąŠąĘą┤čĆą░ą▓ą╗čÅčÄ č鹥ą▒čÅ čü ąöąĮąĄą╝ ąĀąŠąČą┤ąĄąĮąĖčÅ ąĖ ąČąĄą╗ą░čÄ, čćč鹊ą▒čŗ čéą▓ąŠą╣ čüčāąĮą┤čāą║ čüąŠ čüčģąĄą╝ą░ą╝ąĖ ąĖ ąŠą┐ąĖčüą░ąĮąĖčÅą╝ąĖ ą┤ąĄą▓ą░ą╣čüąŠą▓ ą┐ąŠą┐ąŠą╗ąĮčÅą╗čüčÅ ą▓čüčæ ą▒ąŠą╗čīčłąĖą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ čłąĄą┤ąĄą▓čĆąŠą▓! ąś čüąŠ čüą▓ąŠąĄą╣ čüč鹊čĆąŠąĮčŗ ą▓čĆčāčćą░čÄ č鹥ą▒ąĄ ą▓ąŠčé čéą░ą║ąŠą╣ ą▓ąŠčé ą║čĆą░čüąĖą▓čŗą╣ ą┐ąŠą┤ą░čĆąŠč湥ą║!  ąØčā ą░ č鹥ą┐ąĄčĆčī ąŠ č鹊ą╝, čćč鹊 čŹč鹊 čéą░ą║ąŠąĄ, ąĖ ą║ą░ą║ čŹč鹊 čĆą░ą▒ąŠčéą░ąĄčé. ąŁčéąĖ čćą░čüčŗ ąĖąĘą▓ąĄčüčéąĮčŗ ą║ą░ą║ "ą¦ą░čüčŗ-ą┐čĆąŠą┐ąĄą╗ą╗ąĄčĆ" (Propeller Clock), "ąÆąĖčĆčéčāą░ą╗čīąĮčŗąĄ čćą░čüčŗ" (Virtual Clock). ąśčģ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéčī čüąŠčüč鹊ąĖčé ą▓ č鹊ą╝, čćč鹊 ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖąĄ čćą░čüąŠą▓ čüąŠąĘą┤ą░ąĄčéčüčÅ ą▒čŗčüčéčĆąŠ ą▓čĆą░čēą░čÄčēąĄą╣čüčÅ ą╗ąĖąĮąĄą╣ą║ąŠą╣ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą▓. ą¤čĆąĖ ą▓ąĘą│ą╗čÅą┤ąĄ ąĮą░ čŹčéąĖ čćą░čüčŗ čüąŠąĘą┤ą░ąĄčéčüčÅ ąĖą╗ą╗čĹʹĖčÅ, ą▒čāą┤č鹊 ąŠąĮąĖ ą┐čĆąŠąĄčåąĖčĆčāčÄčéčüčÅ ą▓ ą▓ąŠąĘą┤čāčģąĄ! ąÆ ąĖąĮč鹥čĆąĮąĄč鹥 ąĄčüčéčī ą╝ąĮąŠąČąĄčüčéą▓ąŠ ą║ąŠąĮčüčéčĆčāą║čåąĖą╣ čéą░ą║ąĖčģ čćą░čüąŠą▓, ąŠą┤ąĮą░ą║ąŠ ą▓čüąĄ ąŠąĮąĖ ąĮąĄ ą┤ąŠą▓ąĄą┤ąĄąĮčŗ ą┤ąŠ čāą╝ą░: ą▓ ąĮąĄą║ąŠč鹊čĆčŗčģ ą║ąŠąĮčüčéčĆčāą║čåąĖčÅčģ 菹ĮąĄčĆą│ąĖčÅ ąĮą░ ą┐ąŠą┤ą▓ąĖąČąĮčāčÄ čćą░čüčéčī ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ č湥čĆąĄąĘ čüą║ąŠą╗čīąĘčÅčēąĖą╣ ą║ąŠąĮčéą░ą║čé – čŹč鹊 čłčāą╝ąĮąŠ ąĖ ąĮąĄąĮą░ą┤ąĄąČąĮąŠ; ą┐čĆąĖ ąŠčéą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ą┐ąŠčćčéąĖ ą▓ąŠ ą▓čüąĄčģ ą║ąŠąĮčüčéčĆčāą║čåąĖčÅčģ ą▓čĆąĄą╝čÅ čā čćą░čüąŠą▓ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ; ą▓ ąĮąĄą║ąŠč鹊čĆčŗčģ ą║ąŠąĮčüčéčĆčāą║čåąĖčÅčģ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮą░ ą▒ą░čéą░čĆąĄčÅ čĆąĄąĘąĄčĆą▓ąĮąŠą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ ąĮą░ ą┐ąŠą┤ą▓ąĖąČąĮąŠą╣ čćą░čüčéąĖ – čüčéčĆą░čłąĮąŠ ą┐ąŠą┤čāą╝ą░čéčī ą║ą░ą║ąĖąĄ ą▓ąŠąĘąĮąĖą║ą░čÄčé ą▒ąĖąĄąĮąĖčÅ ąĖąĘ-ąĘą░ ą▒ą░čéą░čĆąĄąĖ (čŹč鹊 ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ą▒čŗčüčéčĆąŠą╝čā ą▓čŗčģąŠą┤čā ąĖąĘ čüčéčĆąŠčÅ ą┐ąŠą┤čłąĖą┐ąĮąĖą║ą░ ą╝ąŠč鹊čĆą░). ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, čéą░ą║ąĖąĄ čćą░čüčŗ ąĮąĄ ąŠčüčéą░ą▓ąĖčłčī ąĮą░ ąĮąŠčćčī ą▓ą║ą╗čÄč湥ąĮąĮčŗą╝ąĖ – čłčāą╝ ą╝ąŠč鹊čĆą░ ąĖ čÅčĆą║ą░čÅ ą┐ąŠą┤čüą▓ąĄčéą║ą░ ą▒čāą┤čāčé ą╝ąĄčłą░čéčī čāčüąĮčāčéčī. ąÆ čüą▓čÅąĘąĖ čü čŹčéąĖą╝ ą▒čŗą╗ąŠ čĆąĄčłąĄąĮąŠ čüą┤ąĄą╗ą░čéčī čćą░čüčŗ čüąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčÅą╝ąĖ:
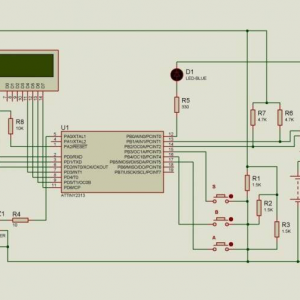
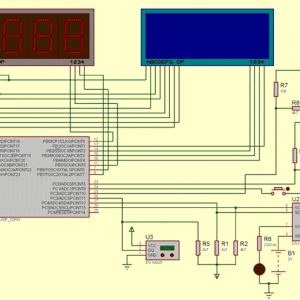
ąśčéą░ą║, čćą░čüčŗ ą┤ąĄą╗ą░ąĄą╝ ąĖąĘ ą┤ą▓čāčģ ą┐ą╗ą░čé – ą┐ąŠą┤ą▓ąĖąČąĮą░čÅ, ąĮą░čģąŠą┤čÅčēą░čÅčüčÅ ąĮą░ čĆąŠč鹊čĆąĄ ą╝ąŠč鹊čĆą░ ąĖ ąĮąĄą┐ąŠą┤ą▓ąĖąČąĮą░čÅ. ąØą░ ą┐ąŠą┤ą▓ąĖąČąĮčāčÄ ą┐ą╗ą░čéčā ą▒čŗą╗ąŠ čĆąĄčłąĄąĮąŠ ą▓ąŠąĘą╗ąŠąČąĖčéčī č鹊ą╗čīą║ąŠ čäčāąĮą║čåąĖčÄ ąĖąĮą┤ąĖą║ą░čåąĖąĖ, ą░ ąĮą░ ąĮąĄą┐ąŠą┤ą▓ąĖąČąĮčāčÄ – ą▓čüąĄ ąŠčüčéą░ą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ. ąŁąĮąĄčĆą│ąĖčÄ ąĖ ą┤ą░ąĮąĮčŗąĄ ąĮą░ ą┐ąŠą┤ą▓ąĖąČąĮčāčÄ čćą░čüčéčī ą▒čŗą╗ąŠ čĆąĄčłąĄąĮąŠ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą┐ąŠ čéčĆą░ąĮčüč乊čĆą╝ą░č鹊čĆčā, ąŠą▒ čŹč鹊ą╝ ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ ąĮąĖąČąĄ)) ąÉ čüąĄą╣čćą░čü – čüčģąĄą╝čŗ.  ąĀąĖčü. 1. ąØąĄą┐ąŠą┤ą▓ąĖąČąĮą░čÅ čćą░čüčéčī (ą║ą╗ąĖą║ą░ą▒ąĄą╗čīąĮąŠ)  ąĀąĖčü. 2. ą¤ąŠą┤ą▓ąĖąČąĮą░čÅ čćą░čüčéčī (ą║ą╗ąĖą║ą░ą▒ąĄą╗čīąĮąŠ) ąĪčéą░čåąĖąŠąĮą░čĆąĮą░čÅ (ąĮąĄą┐ąŠą┤ą▓ąĖąČąĮą░čÅ) čćą░čüčéčī. ąśčéą░ą║, ąĮą░čćąĮąĄą╝ ą┐ąŠą▓ąĄčüčéą▓ąŠą▓ą░ąĮąĖąĄ čü ąĮąĄą┐ąŠą┤ą▓ąĖąČąĮąŠą╣ čćą░čüčéąĖ. ąĪąĄčĆą┤čåąĄą╝ čüčģąĄą╝čŗ čÅą▓ą╗čÅąĄčéčüčÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ (ą£ąÜ) DD3 ATmega48. ąŁč鹊čé ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▒čŗą╗ ą▓čŗą▒čĆą░ąĮ ą┐ąŠč鹊ą╝čā, čćč鹊 ąĖą╝ąĄąĄčé 4 ą©ąśą£-ą┐ąŠčĆčéą░, čā ą║ąŠč鹊čĆčŗčģ ą╝ąŠąČąĮąŠ ąĮą░čüčéčĆą░ąĖą▓ą░čéčī ą┐ąĄčĆąĖąŠą┤ ą©ąśą£. ąŁč鹊 ąŠč湥ąĮčī čāą┤ąŠą▒ąĮąŠ ą┤ą╗čÅ čŹą║čüą┐ąĄčĆąĖą╝ąĄąĮčéą░ą╗čīąĮąŠą│ąŠ ą┐ąŠą┤ą▒ąŠčĆą░ čĆą░ą▒ąŠč湥ą╣ čćą░čüč鹊čéčŗ ąĖ čüą║ą▓ą░ąČąĮąŠčüčéąĖ ą┐ąĖčéą░čÄčēąĄą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą▓čĆą░čēą░čÄčēąĄą│ąŠčüčÅ čéčĆą░ąĮčüč乊čĆą╝ą░č鹊čĆą░. ąĪ ą┐ąŠą╝ąŠčēčīčÄ čŹčéąĖčģ ą┐ąŠčĆč鹊ą▓ čéą░ą║ąČąĄ ą╝ąŠąČąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī ą╝ąŠčüč鹊ą▓čŗą╝ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗ąĄą╝ čü ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ ą╝ąĄčĆčéą▓ąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (dead-time, čćč鹊ą▒čŗ ąĖčüą║ą╗čÄčćąĖčéčī ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠąĄ ąŠčéą║čĆčŗčéąĖąĄ ą▓ąĄčĆčģąĮąĄą│ąŠ ąĖ ąĮąĖąČąĮąĄą│ąŠ čéčĆą░ąĮąĘąĖčüč鹊čĆą░). ąóą░ą║ąŠą╣ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī čüąŠą▒čĆą░ąĮ ąĮą░ 菹╗ąĄą╝ąĄąĮčéą░čģ DA1, DA3, VT1, VT3. ąóąŠą┐ąŠą╗ąŠą│ąĖčÅ «ą╝ąŠčüčé» ą▓čŗą▒čĆą░ąĮą░ ąĮąĄčüą╗čāčćą░ą╣ąĮąŠ. ą¤čĆąĖ čéą░ą║ąŠą╝ ą┐ąĖčéą░ąĮąĖąĖ čéčĆą░ąĮčüč乊čĆą╝ą░č鹊čĆą░, ąĮą░ ą▓č鹊čĆąĖčćąĮąŠą╣ ąŠą▒ą╝ąŠčéą║ąĄ ąĮąĄ ą▒čāą┤ąĄčé čüčéčĆą░čłąĮčŗčģ ą▓čŗą▒čĆąŠčüąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą▒čāą┤čāčé ąĮą░ą╝ ą╝ąĄčłą░čéčī, ą┐ąŠčüą║ąŠą╗čīą║čā ą╝čŗ ąĮąĄ č鹊ą╗čīą║ąŠ ą┐ąĄčĆąĄą┤ą░ąĄą╝ ąĮą░ ąĮąĄąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ, ąĮąŠ ąĄčēąĄ ąĖ ą┤ą░ąĮąĮčŗąĄ. ąĢčēąĄ ąŠą┤ąĖąĮ ą▓čŗą▓ąŠą┤ ą©ąśą£ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮ ą┤ą╗čÅ čĆąĄą│čāą╗ąĖčĆąŠą▓ą║ąĖ čüą║ąŠčĆąŠčüčéąĖ ą▓čĆą░čēąĄąĮąĖčÅ ą╝ąŠč鹊čĆą░. ą¤čĆąĖ ąŠčéą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ č鹥ą║čāčēąĖąĄ ą▓čĆąĄą╝čÅ ąĖ ą┤ą░čéą░ ą┤ąŠą╗ąČąĮčŗ čüąŠčģčĆą░ąĮčÅčéčīčüčÅ. ąŚą░ čŹč鹊 ąŠčéą▓ąĄčćą░ąĄčé ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ čćą░čüąŠą▓ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ DD2. ą¦č鹊ą▒čŗ čćą░čüčŗ čāą┐čĆą░ą▓ą╗čÅą╗ąĖčüčī čü ą┐čāą╗čīčéą░, ą▓ čüčģąĄą╝ąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ č乊č鹊ą┐čĆąĖąĄą╝ąĮąĖą║ TSOP4836. ąźąŠčćčā čüą║ą░ąĘą░čéčī, ą┐ąŠą┤ąŠą╣ą┤ąĄčé ą░ą▒čüąŠą╗čÄčéąĮąŠ ą╗čÄą▒ąŠą╣ č乊č鹊ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮą░ 5 ąÆ ąĖ čĆą░ą▒ąŠč湥ą╣ čćą░čüč鹊č鹊ą╣ 36 ą║ąōčå (38 ą║ąōčå ą┤ą╗čÅ ą┐čāą╗čīčéą░ SONY). ąÜčüčéą░čéąĖ, ą┐čĆąŠčłąĖą▓ą║ą░ ąĮą░ą┐ąĖčüą░ąĮą░ ą┤ą╗čÅ ą┐čāą╗čīč鹊ą▓ SONY, ą▓ čćą░čüčéąĮąŠčüčéąĖ ą┤ą╗čÅ RM-869. ąĪą▓ąĄč鹊ą┤ąĖąŠą┤ HL2 – ąĖąĮčäčĆą░ą║čĆą░čüąĮčŗą╣. ąĢą│ąŠ ąĖąĘą╗čāč湥ąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüčéčĆąĄą╗ą║ąŠą╣ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čüą▓ąŠąĄą│ąŠ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ. ąØą░ ą▒ąŠčĆčéčā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čéą░ą║ąČąĄ ąĖą╝ąĄąĄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü UART. ą¦ąĄčĆąĄąĘ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ USB-UART DD1, čćą░čüčŗ ą╝ąŠąČąĮąŠ ą┐ąŠą┤čüąŠąĄą┤ąĖąĮąĖčéčī ą║ ą║ąŠą╝ą┐čā ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ ąĘą░ą│čĆčāąĘą║ąĖ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖčÅ/č鹥ą║čüčéą░. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ą┐ąŠ čŹč鹊ą╝čā ąČąĄ ąĖąĮč鹥čĆč乥ą╣čüčā ą╝ąŠąČąĮąŠ ąĖ ąŠčéą┐čĆą░ą▓ą╗čÅčéčī ą┤ą░ąĮąĮčŗąĄ ąĮą░ ą┐ąŠą┤ą▓ąĖąČąĮčāčÄ čćą░čüčéčī! ą× ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ čÅ čĆą░čüčüą║ą░ąČčā ą┐ąŠą┐ąŠąĘąČąĄ, ą░ čüąĄą╣čćą░čü ą¤ąŠą┤ą▓ąĖąČąĮą░čÅ čćą░čüčéčī (čüčéčĆąĄą╗ą║ą░). ą»ą┤čĆąŠą╝ čüčéčĆąĄą╗ą║ąĖ čÅą▓ą╗čÅąĄčéčüčÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ATmega8L, ą║ ą┐ąŠčĆčéą░ą╝ ą║ąŠč鹊čĆąŠą│ąŠ č湥čĆąĄąĘ čĆąĄąĘąĖčüč鹊čĆčŗ ą┐ąŠą┤čüąŠąĄą┤ąĖąĮąĄąĮąŠ 20 čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą▓, č乊č鹊ą┤ąĖąŠą┤ ą║ą░ą║ ą┤ą░čéčćąĖą║ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ, ąĖ ą▓čŗčģąŠą┤ ą┤ąĄčłąĖčäčĆą░č鹊čĆą░ UART. ą×ą▒čĆą░čēą░čÄ ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┐ąŠą╗ąŠą▓ąĖąĮą░ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą▓ čüąŠąĄą┤ąĖąĮčÅąĄčéčüčÅ ą║ą░č鹊ą┤ą░ą╝ąĖ ą║ ą┐ąŠčĆčéą░ą╝ ą£ąÜ, ą░ ą▓č鹊čĆą░čÅ ą┐ąŠą╗ąŠą▓ąĖąĮą░ – ą░ąĮąŠą┤ą░ą╝ąĖ. ąŁč鹊 čüą┤ąĄą╗ą░ąĮąŠ ą┤ą╗čÅ č鹊ą│ąŠ čćč鹊ą▒čŗ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĮą░ą│čĆčāąĘą║čā ą╝ąĄąČą┤čā ą┐ąĖčéą░čÄčēąĄą╣ ąĖ ąĘąĄą╝ą╗čÅąĮąŠą╣ čłąĖąĮąŠą╣ ą£ąÜ, ąĖ ąĮąĄ ą┐ąĄčĆąĄą│čĆčāąČą░čéčī ąŠą┤ąĮčā ąĖąĘ čłąĖąĮ. ąÆ ą║ą░č湥čüčéą▓ąĄ čüčéą░ą▒ąĖą╗ąĖąĘą░č鹊čĆą░ ą▒čŗą╗ ą▓čŗą▒čĆą░ąĮ ą┤ą░ą▓ąĮąŠ ą▓čüąĄą╝ąĖ ąĖąĘą▒ąĖčéčŗą╣ 78L05))). ąĪčéą░ą▓ąĖčéčī ąĖą╝ą┐čāą╗čīčüąĮčŗą╣ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī ąĮąĄ ąĖą╝ąĄąĄčé čüą╝čŗčüą╗ą░, čé.ą║. ą▒ąŠą╗čīčłčāčÄ čćą░čüčéčī ą▓čĆąĄą╝ąĄąĮąĖ ąĖą┤ąĄčé čüąĖą╗čīąĮą░čÅ ą┐čĆąŠčüą░ą┤ą║ą░ ąĮą░ ą▓č鹊čĆąĖčćąĮąŠą╣ ąŠą▒ą╝ąŠčéą║ąĄ čéčĆą░ąĮčüč乊čĆą╝ą░č鹊čĆą░. ąśą╝ąĄąĄčé čüą╝čŗčüą╗ ą┐ąŠčüčéą░ą▓ąĖčéčī ą║ą░ą║ąŠą╣-ąĮąĖą▒čāą┤čī LDO-čüčéą░ą▒ąĖą╗ąĖąĘą░č鹊čĆ, ąĮąŠ ą▓čŗąĖą│čĆčŗčł ą┐ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü 78L05 ą▒čāą┤ąĄčé ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝. ążą░ą║čéąĖč湥čüą║ąĖ, ą▓ ą┤ą░ąĮąĮąŠą╝ čüą╗čāčćą░ąĄ čüčéą░ą▒ąĖą╗ąĖąĘą░č鹊čĆ čéčāčé ąĮčāąČąĄąĮ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąĮąĄ čüąČąĄčćčī čüčģąĄą╝čā, ą║ąŠą│ą┤ą░ ąĮąĄ ą│ąŠčĆčÅčé čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ, ąĮąŠ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝, ą▒ąŠą╗čīčłčāčÄ čćą░čüčéčī ą▓čĆąĄą╝ąĄąĮąĖ ą▓čŗčģąŠą┤ąĮčŗąĄ čéčĆą░ąĮąĘąĖčüč鹊čĆčŗ čüčéą░ą▒ąĖą╗ąĖąĘą░č鹊čĆą░ ąŠčéą║čĆčŗčéčŗ. ąĪčéčĆąĄą╗ą║ą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čüą▓ąŠąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ č乊č鹊ą┤ąĖąŠą┤čā (ąĖą╗ąĖ č乊č鹊čéčĆą░ąĮąĘąĖčüč鹊čĆčā) HL21. ą×ąĮ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗čÄą▒čŗą╝. ą¦ąĄčĆąĄąĘ ą┤ąĖąŠą┤ VD5 čüąĖą│ąĮą░ą╗ ą┐ąŠčüčéčāą┐ą░ąĄčé ąĮą░ ą▓čģąŠą┤ ą┤ąĄčłąĖčäčĆą░č鹊čĆą░. ąöąĄčłąĖčäčĆą░č鹊čĆ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ąĖąĘ čüąĄą▒čÅ 2 RC-čäąĖą╗čīčéčĆą░ ąĖ 2 ą║ąŠą╝ą┐ą░čĆą░č鹊čĆą░, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĄąŠą▒čĆą░ąĘčāčÄčé ąÆą¦ čüąĖą│ąĮą░ą╗ ą▓čŗčüąŠą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ą▓ «1», ą░ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ – ą▓ «0». ąØčā ąĖ č鹥ą┐ąĄčĆčī čüą░ą╝ąŠąĄ ąĖąĮč鹥čĆąĄčüąĮąŠąĄ: ą║ą░ą║ ąĖą┤ąĄčé ą¤ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ. ąśąĘąĮą░čćą░ą╗čīąĮąŠ ą┐čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ą╗ąŠčüčī ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą┐čāč鹥ą╝ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čćą░čüč鹊čéčŗ ą┐ąĖčéą░čÄčēąĄą│ąŠ čüčéčĆąĄą╗ą║čā ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ (20 ą║ąōčå – «1», ąĮąĄą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī UART; 100 ą║ąōčå – «0», ą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī UART). ą×ą┤ąĮą░ą║ąŠ ą║čĆą░čüąĖą▓ąŠ ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ čłą╗ą░ č鹊ą╗čīą║ąŠ ą┐čĆąĖ ą╝ąŠą┤ąĄą╗ąĖčĆąŠą▓ą░ąĮąĖąĖ ą▓ ą¤čĆąŠč鹥čāčüąĄ))) ąÆ čĆąĄą░ą╗čīąĮąŠčüčéąĖ ąČąĄ čŹč鹊 ąŠą║ą░ąĘą░ą╗ąŠčüčī čüą┤ąĄą╗ą░čéčī ą┐ąŠčćčéąĖ ąĮąĄą▓ąŠąĘą╝ąŠąČąĮčŗą╝. ą¤ąŠąĘąČąĄ ą┐čĆąĖčłą╗ą░ ąĖą┤ąĄčÅ ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčī čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ čéčĆą░ąĮčüč乊čĆą╝ą░č鹊čĆą░ ą╝ąŠčüčé/ą┐ąŠą╗čāą╝ąŠčüčé. ąÉ ą┐čĆąĖą║ąŠą╗ ąĘą┤ąĄčüčī ą▓ąŠčé ą▓ č湥ą╝. ą¤čĆąĖ ą┐ąĖčéą░ąĮąĖąĖ čéčĆą░ąĮčüą░ ąŠčé ą╝ąŠčüč鹊ą▓ąŠą│ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čÅ (ą┐ąĄčĆąĄą┤ą░ąĄą╝ «1»), ąĮą░ ą▓čŗčģąŠą┤ąĄ čéčĆą░ąĮčüč乊čĆą╝ą░č鹊čĆą░ ą╝čŗ ą┐ąŠą╗čāčćą░ąĄą╝ ąĖ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗąĄ ąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮčŗąĄ ąĖą╝ą┐čāą╗čīčüčŗ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗąĄ ąĖą╝ą┐čāą╗čīčüčŗ ą┐čĆąŠčģąŠą┤čÅčé č湥čĆąĄąĘ ą┤ąĖąŠą┤ VD5 ąĖ ą▓ č鹊čćą║ąĄ ąÉ (čĆąĖčü. 2) ą╝čŗ ą┐ąŠą╗čāčćą░ąĄą╝ čüąĖą│ąĮą░ą╗, č乊čĆą╝ą░ ą║ąŠč鹊čĆąŠą│ąŠ ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčü. 3. 
ąĀąĖčü. 4. ążąŠčĆą╝ą░ čüąĖą│ąĮą░ą╗ą░ ą▓ č鹊čćą║ąĄ ąÉ čĆąĖčüčāąĮą║ą░ 2 ą┐čĆąĖ čĆą░ą▒ąŠč鹥 čéčĆą░ąĮčüč乊čĆą╝ą░č鹊čĆą░ ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąŠą╗čāą╝ąŠčüčéą░ ąĀą░ąĘąĮąĖčåą░ ą╝ąĄąČą┤čā ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮčŗą╝ąĖ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ ą║ąŠą╗ąŠčüčüą░ą╗čīąĮą░čÅ! ąöą░ą╗ąĄąĄ ą┐ąŠčüą╗ąĄ ą┤ąĖąŠą┤ą░ VD5 čäąĖą╗čīčéčĆčāąĄą╝ čüąĖą│ąĮą░ą╗ čü ą┐ąŠą╝ąŠčēčīčÄ DA3, ąĖ ą┐ąŠą╗čāčćą░ąĄą╝ ąĮą░ ąĄąĄ ą▓čŗčģąŠą┤ąĄ čćąĖčüčéčŗą╣ UART)) ąĪ čāą║ą░ąĘą░ąĮąĮčŗą╝ąĖ ąĮąŠą╝ąĖąĮą░ą╗ą░ą╝ąĖ ą┤ąĄčłąĖčäčĆą░č鹊čĆ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ čüą║ąŠčĆąŠčüčéąĖ ą┤ąŠ 1200 ą▒ąĖčé/čü. ąóąĄąŠčĆąĄčéąĖč湥čüą║ąĖ, ą╝ąŠąČąĮąŠ ą┤ąŠčüčéąĖčćčī ąĖ ą▒ąŠą╗čīčłąĄą╣ čüą║ąŠčĆąŠčüčéąĖ, ąĮąŠ ą╝ąĄąĮčÅ ąĖ čŹčéą░ ą▓ą┐ąŠą╗ąĮąĄ čāčüčéčĆąŠąĖą╗ą░. ąźąŠčćčā ąĘą░ą╝ąĄčéąĖčéčī, ą┤ą╗čÅ čüą▓čÅąĘąĖ čüąŠ čüčéčĆąĄą╗ą║ąŠą╣ ąĮąĄą┐ąŠą┤ą▓ąĖąČąĮą░čÅ čćą░čüčéčī č鹊ąČąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ UART. ąÆ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ą▓ą║ą╗čÄč湥ąĮą░ čüą▓čÅąĘčī čü ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą╝: čéčĆą░ąĮąĘąĖčüč鹊čĆ VT2 ąĘą░ą║čĆčŗčé ąĖ ą┤ą░ąĮąĮčŗąĄ ąĮą░ čüą║ąŠčĆąŠčüčéąĖ 38400 ą▒ąĖčé/čü ą▒ąĄąĘ ą┐čĆąĄą┐čÅčéčüčéą▓ąĖą╣ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ąĮą░ DD1 ąĖ ą┤ą░ą╗ąĄąĄ ąĮą░ ą║ąŠą╝ą┐. ąÜąŠą│ą┤ą░ ąĮčāąČąĮąŠ ą┐ąĄčĆąĄą┤ą░čéčī ą┤ą░ąĮąĮčŗąĄ ąĮą░ ą┐ąŠą┤ą▓ąĖąČąĮčāčÄ čćą░čüčéčī, ą╝čŗ ąŠčéą║čĆčŗą▓ą░ąĄą╝ VT2, č鹥ą╝ čüą░ą╝čŗą╝ ą▒ą╗ąŠą║ąĖčĆčāčÅ ą┐ąĄčĆąĄą┤ą░čćčā ą┤ą░ąĮąĮčŗčģ ąĮą░ ą║ąŠą╝ą┐; ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝ čüą║ąŠčĆąŠčüčéčī ą▓ 1200 ą║ą▒ąĖčé/čü ąĖ ą▓ą║ą╗čÄčćą░ąĄą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ INT0 ą┐ąŠ čäčĆąŠąĮčéčā ąĖ čüčĆąĄąĘčā. ąÆ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĖ čüčćąĖčéčŗą▓ą░ąĄą╝ čüąŠčüč鹊čÅąĮąĖčÅ ąĮąŠąČą║ąĖ ąĖ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čāčĆąŠą▓ąĮąĄą╝ ą▓ą║ą╗čÄčćą░ąĄą╝ čéčĆą░ąĮčüč乊čĆą╝ą░č鹊čĆ ą▓ ąĮčāąČąĮčŗą╣ čĆąĄąČąĖą╝. ą¤ąŠą┤ą▓ąŠą┤ąĮčŗą╣ ą║ą░ą╝ąĄąĮčī ą¤čĆąĖ ą┐ąĄčĆąĄčģąŠą┤ąĄ ą▓ ą┐ąŠą╗čāą╝ąŠčüč鹊ą▓ąŠą╣ čĆąĄąČąĖą╝, čüčéčĆąĄą╗ą║ą░ ą┐ąŠą╗čāčćą░ąĄčé ą▓čüąĄą│ąŠ 50% ą╝ąŠčēąĮąŠčüčéąĖ ąĖ ą┐ą╗čÄčü ą║ čŹč鹊ą╝čā ą▒ąŠą╗ąĄąĄ ą┐čāą╗čīčüąĖčĆčāčÄčēąĄąĄ ą┐ąĖčéą░čÄčēąĄąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ (ą║ą░ą║ ą▒čāą┤č鹊 čü ą┤ąĖąŠą┤ąĮąŠą│ąŠ ą╝ąŠčüčéą░ ą┐ąĄčĆąĄčłą╗ąĖ ąĮą░ ąŠą┤ąĖąĮ ą┤ąĖąŠą┤). ąĢčüą╗ąĖ ą▓ ą╝ąŠą╝ąĄąĮčé ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą│ąŠčĆčÅčé čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ, č鹊 ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ «0» ą╝čŗ ą┐ąŠą╗čāčćą░ąĄą╝ čüąĖą╗čīąĮčāčÄ ą┐čĆąŠčüą░ą┤ą║čā ą┐ąĖčéą░čÄčēąĄą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ąóą░ą║ ą║ą░ą║ ą£ąÜ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ ą▓čüčéčĆąŠąĄąĮąĮąŠą╝ RC-ą│ąĄąĮąĄčĆą░č鹊čĆąĄ, ąĖ ąĄą│ąŠ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, č鹊 ą╝čŗ ą┐ąŠą╗čāčćą░ąĄą╝ čĆą░čüčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÄ ą┐čĆąĖ ą┐čĆąĖąĄą╝ąĄ ą┤ą░ąĮąĮčŗčģ. ąÆ čüą▓čÅąĘąĖ čü čŹčéąĖą╝ ąĮčāąČąĮąŠ ą╗ąĖą▒ąŠ ą│ą░čüąĖčéčī čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ ą▓ąŠ ą▓čĆąĄą╝čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ (ą║ą░ą║ čÅ ąĖ čüą┤ąĄą╗ą░ą╗), ą╗ąĖą▒ąŠ čüčéą░ą▓ąĖčéčī ą║ą▓ą░čĆčå. ąÆąĮčāčéčĆąĄąĮąĮąĄąĄ ą¤ą×. ąÜ čüčéą░čéčīąĄ ą┐čĆąĖą╗ą░ą│ą░čÄ ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą┤ą╗čÅ čüčéčĆąĄą╗ą║ąĖ. ą×ąĮ čüą╗ą░ą▒ąŠ ąĘą░ą║ąŠą╝ą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮ, ąĮąŠ ą▓ ą┐čĆąĖąĮčåąĖą┐ąĄ čĆą░ąĘąŠą▒čĆą░čéčīčüčÅ ą▓ ąĮąĄą╝ ąĮąĄ čüą╗ąŠąČąĮąŠ. ą×ą┐ąĖčłčā ąŠčüąĮąŠą▓ąĮčŗąĄ ą╝ąŠą╝ąĄąĮčéčŗ:
ąśčüčģąŠą┤ąĮąĖą║ąĖ čüčéą░čåąĖąŠąĮą░čĆąĮąŠą╣ čćą░čüčéąĖ ąĮąĄ ą▓čŗą║ą╗ą░ą┤čŗą▓ą░čÄ. ąöą╗čÅ ąĮąĄąĄ ą┐čĆąŠą│čā ą┐čĆąĖčłą╗ąŠčüčī ą┐ąĖčüą░čéčī ąĮą░ čüą║ąŠčĆčāčÄ čĆčāą║čā, ąĖ čéą░ą╝ ą▓čüąĄ ąŠč湥ąĮčī ą║čĆąĖą▓ąŠ ąĮą░ą┐ąĖčüą░ąĮąŠ. ąØąĄ čģąŠčćčā čüčéčŗą┤ąĖčéčīčüčÅ. ąØąŠ .hex ą▓čŗą║ą╗ą░ą┤čŗą▓ą░čÄ ą┤ą╗čÅ ąŠą▒ąĄąĖčģ ą┐ą╗ą░čé. ąóąĄą┐ąĄčĆčī ą┐ąĄčĆąĄą╣ą┤ąĄą╝ ą║ ą╝ąŠąĄą╣ čüą░ą╝ąŠą╣ ąĮąĄą╗čÄą▒ąĖą╝ąŠą╣ čćą░čüčéąĖ. ąØą░ąĘčŗą▓ą░ąĄčéčüčÅ ąŠąĮą░ ą£ąĄčģą░ąĮąĖą║ą░ ąśčéą░ą║, ą╝čŗ ąĖą╝ąĄąĄą╝:
ąĀąĖčü. 6. ą¤ąŠą┤ą▓ąĖąČąĮą░čÅ čćą░čüčéčī. ą×ą▓ą░ą╗ąŠą╝ ąŠą▒ąŠąĘąĮą░č湥ąĮčŗ čāčćą░čüčéą║ąĖ čüąŠ čüąĮčÅč鹊ą╣ ą╝ą░čüą║ąŠą╣ ąØą░ ąŠą▒čĆą░čéąĮąŠą╣ čüč鹊čĆąŠąĮąĄ čüčéčĆąĄą╗ą║ąĖ ą▓ąĖą┤ąĖą╝ ą┐ąŠčüą░ą┤ąŠčćąĮąŠąĄ ą╝ąĄčüč鹊 ą┐ąŠą┤ č乊č鹊ą┤ąĖąŠą┤ ąĖ ą┐ą╗ąŠčēą░ą┤ą║ąĖ čüąŠ čüąĮčÅč鹊ą╣ ą╝ą░čüą║ąŠą╣. ąŁčéąĖ ą┐ą╗ąŠčēą░ą┤ą║ąĖ čüą┤ąĄą╗ą░ąĮčŗ ą┤ą╗čÅ ą▒ą░ą╗ą░ąĮčüąĖčĆąŠą▓ą║ąĖ: ąĮą░ ąĮąĖčģ ąĮą░ąĮąŠčüąĖą╝ ą┐čĆąĖą┐ąŠą╣ ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ ąĮąĄ ą┐čĆąŠą┐ą░ą┤čāčé ą▒ąĖąĄąĮąĖčÅ ą┐čĆąĖ ą▓čĆą░čēąĄąĮąĖąĖ. ąĪčéčĆąĄą╗ą║ą░ ą▓čĆą░čēą░ąĄčéčüčÅ čüąŠ čüą║ąŠčĆąŠčüčéčīčÄ 40 ąŠą▒/ą╝ąĖąĮ, čéą░ą║ čćč鹊 ąŠč湥ąĮčī ą▓ą░ąČąĮąŠ čģąŠčĆąŠčłąŠ ąĄąĄ čüą▒ą░ą╗ą░ąĮčüąĖčĆąŠą▓ą░čéčī. ąÆ ą║ą░č湥čüčéą▓ąĄ ą╝ąŠč鹊čĆą░ čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ ąŠą▒čŗčćąĮčŗą╣ ą║čāą╗ąĄčĆ. ąØą░ čĆąĖčü. 7 ą┐ąŠą║ą░ąĘą░ąĮčŗ 2 ą║čāą╗ąĄčĆą░: ąŠą┤ąĖąĮ čü ą┐ąŠą┤čłąĖą┐ąĮąĖą║ąŠą╝ čüą║ąŠą╗čīąČąĄąĮąĖčÅ ą▓č鹊čĆąŠą╣ – ą║ą░č湥ąĮąĖčÅ. ąÜą░ąĘą░ą╗ąŠčüčī ą▒čŗ – ą┐ąŠą┤čłąĖą┐ąĮąĖą║ ą║ą░č湥ąĮąĖčÅ ą║ąŠąĮąĄčćąĮąŠ ąČąĄ ą▒čāą┤ąĄčé ą╗čāčćčłąĄ, ąĮąŠ… ąöą░, ąŠąĮ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠ ą▒ąŠą╗ąĄąĄ ą┤ąŠčĆąŠą│ąŠą╣, ą┤ąŠą╗ą│ąŠą▓ąĄčćąĮčŗą╣, ąĖ čüčĆą░ąĘčā ąĮą░ą▒ąĖčĆą░ąĄčé ąĮčāąČąĮčŗąĄ ąŠą▒ąŠčĆąŠčéčŗ, ąĮąŠ ą┐ąŠą┤ą▓ąŠą┤ąĮčŗą╣ ą║ą░ą╝ąĄąĮčī čéčāčé ą▓ č鹊ą╝, čćč鹊 ą┐ą╗ą░čéą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓ ą║čāą╗ąĄčĆąĄ čü ą┐ąŠą┤čłąĖą┐ąĮąĖą║ąŠą╝ ą║ą░č湥ąĮąĖčÅ ą┐čĆąŠčēąĄ, ąĖ ą┐ąŠčģąŠąČąĄ ąŠąĮą░ ą┐ąĖčéą░ąĄčé ą╝ąŠč鹊čĆ čćąĖčüčéčŗą╝ąĖ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮčŗą╝ąĖ ąĖą╝ą┐čāą╗čīčüą░ą╝ąĖ (ą░ ąĮąĄ čüąĖąĮčāčüąŠą╝), čćč鹊 ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ čüąĖą╗čīąĮąŠą╝čā ą│čāą╗čā ą╝ąŠč鹊čĆą░. ąÆ ą║čāą╗ąĄčĆąĄ čü ą┐ąŠą┤čłąĖą┐ąĮąĖą║ąŠą╝ čüą║ąŠą╗čīąČąĄąĮąĖčÅ ąĖąĮą░čÅ čüąĖčéčāą░čåąĖčÅ, čéą░ą╝ ą┐ąŠčģąŠąČąĄ čüąĖąĮčāčü ąĮą░ ąŠą▒ą╝ąŠčéą║ą░čģ ą╝ąŠč鹊čĆą░ ąĖ ąŠąĮ ą┐čĆą░ą║čéąĖč湥čüą║ąĖ ą▒ąĄčüčłčāą╝ąĄąĮ! ąóąĄą┐ąĄčĆčī čüą▒ąŠčĆą║ą░. ąŻ ą║čāą╗ąĄčĆą░ ą▓čŗą║čāčüčŗą▓ą░ąĄą╝ ą▓čüąĄ ą╗ąŠą┐ą░čüčéąĖ, ąĖ ąŠčéą║čāčüčŗą▓ą░ąĄą╝ ą╝ąŠč鹊čĆčćąĖą║ ąŠčé ą║čĆąĄą┐ą╗ąĄąĮąĖą╣ (čĆąĖčü. 8). ąØą░ą┐ąĖą╗čīąĮąĖą║ąŠą╝ čüą│ą╗ą░ąČąĖą▓ą░ąĄą╝ ąŠą▒čĆą░ąĘąŠą▓ą░ą▓čłąĖąĄčüčÅ ąĮąĄčĆąŠą▓ąĮąŠčüčéąĖ ąĮą░ čĆąŠč鹊čĆąĄ. ąŚą░č鹥ą╝ ąĮą░ ąĮąĄą╝ ąĮą░ą╝ą░čéčŗą▓ą░ąĄą╝ ą▓č鹊čĆąĖčćąĮčāčÄ ą║ą░čéčāčłą║čā (ąŠąĮą░ ą▒čāą┤ąĄčé ą┐ąĖčéą░čéčī čüčéčĆąĄą╗ą║čā). ąÉą║ą║čāčĆą░čéąĮąŠ ąĮą░ą╝ą░čéčŗą▓ą░ąĄą╝ 60 ą▓ąĖčéą║ąŠą▓ ą┐čĆąŠą▓ąŠą┤ąŠą╝ 0,2 ą╝ą╝. ąÜą░čéčāčłą║čā ąĘą░ą║ą╗ąĄąĖą▓ą░ąĄą╝, čćč鹊ą▒čŗ ąĮąĄ čĆą░ąĘą╝ą░čéčŗą▓ą░ą╗ą░čüčī. ą¤ąŠą╗čāčćą░ąĄą╝ čćč鹊-č鹊 ą▓čĆąŠą┤ąĄ čŹč鹊ą│ąŠ: ąĀąĖčü. 9. ąĪčéčĆąĄą╗ą║ą░, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮą░čÅ ąĮą░ čĆąŠč鹊čĆąĄ čü ąĮą░ą╝ąŠčéą░ąĮąĮąŠą╣ ą▓č鹊čĆąĖčćąĮąŠą╣ ą║ą░čéčāčłą║ąŠą╣ ąŚą░č鹥ą╝ ą┤ąĄą╗ą░ąĄą╝ ą║ą░čĆą║ą░čüąĖą║ čćčāčéčī ą▒ąŠą╗čīčłąĄą│ąŠ ą┤ąĖą░ą╝ąĄčéčĆą░, č湥ą╝ ą┐ąŠą╗čāčćąĖą▓čłą░čÅčüčÅ ą║ą░čéčāčłą║ą░. ąŚą░ąĘąŠčĆ ą╝ąĄąČą┤čā ą║ą░čéčāčłą║ą░ą╝ąĖ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą║ą░ą║ ą╝ąŠąČąĮąŠ ą╝ąĄąĮčīčłąĄ! ąŚą░č鹥ą╝ ąĮą░ ą║ą░čĆą║ą░čü ąĮą░ą╝ą░čéčŗą▓ą░ąĄą╝ ą┐ąĄčĆą▓ąĖčćąĮčāčÄ ąŠą▒ą╝ąŠčéą║čā – 35 ą▓ąĖčéą║ąŠą▓ ą┐čĆąŠą▓ąŠą┤ą░ 0,35 ą╝ą╝. ąĢąĄ ą╝čŗ ą┐čĆąĖą║ą╗ąĄąĖą▓ą░ąĄą╝ ą║ ą▒čŗą▓čłąĖą╝ ą║čĆąĄą┐ą╗ąĄąĮąĖčÅą╝ čüčéą░č鹊čĆą░. ąÆ ąĖč鹊ą│ąĄ ą┐ąŠą╗čāčćąĖą╝ č鹊 čćč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 10. ąĀąĖčü. 10. ą£ąŠąĮčéą░ąČ ą┐ąĄčĆą▓ąĖčćąĮąŠą╣ ąŠą▒ą╝ąŠčéą║ąĖ ąÆąØąśą£ąÉąØąśąĢ!!! ą£ąŠč鹊čĆ ąĮąĄ čĆą░ąĘą▒ąĖčĆą░čéčī! ąĀą░ąĘą▒ąŠčĆą║ą░ čāą▓ąĄą╗ąĖčćąĖčé ąĄą│ąŠ čāčĆąŠą▓ąĄąĮčī čłčāą╝ą░ ąĖ čüąĮąĖąĘąĖčé ąĄą│ąŠ ą┤ąŠą╗ą│ąŠą▓ąĄčćąĮąŠčüčéčī. ąóąĄą┐ąĄčĆčī ą║ąŠčĆą┐čāčü. ąóčāčé čāąČ ą┤ąĄą╗ąŠ ą▓ą║čāčüą░ ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣ ą║ą░ąČą┤ąŠą│ąŠ. ą» ą┤ąĄą╗ą░ą╗ ąĖąĘ ąŠčĆą│čüč鹥ą║ą╗ą░. ąøčāčćčłąĄ ą▓čüąĄą│ąŠ ą║ąŠąĮąĄčćąĮąŠ ąĘą░ą║ą░ąĘą░čéčī ą▓ čäąĖčĆą╝ąĄ, ą║ąŠč鹊čĆą░čÅ ąĘą░ąĮąĖą╝ą░ąĄčéčüčÅ ą╗ą░ąĘąĄčĆąĮąŠą╣ čĆąĄąĘą║ąŠą╣, ą│čĆą░ą▓ąĖčĆąŠą▓ą║ąŠą╣. ąÆ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ ą║ čüčéą░čéčīąĄ ąĄčüčéčī č湥čĆč鹥ąČ, ą┐ąŠ ą║ąŠč鹊čĆąŠą╝čā čÅ čāąČąĄ ąĘą░ą║ą░ąĘčŗą▓ą░ą╗ ą╗ą░ąĘąĄčĆąĮčāčÄ čĆąĄąĘą║čā ąŠčĆą│čüč鹥ą║ą╗ą░. ą¤ąŠą╗čāč湥ąĮąĮčŗąĄ ą┐ąŠčüą╗ąĄ ą╗ą░ąĘąĄčĆąĮąŠą╣ čĆąĄąĘą║ąĖ 菹╗ąĄą╝ąĄąĮčéčŗ čāą┤ąŠą▒ąĮąŠ čüą║ą╗ąĄąĖą▓ą░čéčī, ąĖ ą▓ ąĖč鹊ą│ąĄ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą║čĆą░čüąĖą▓čŗą╣ ą║ąŠčĆą┐čāčü. ąÜąŠą│ą┤ą░ ą║ąŠčĆą┐čāčü čüąŠą▒čĆą░ąĮ, ą║ čåąĄąĮčéčĆčā ą┐čĆąĖą║ą╗ąĄąĖą▓ą░ąĄą╝ ą╝ąŠč鹊čĆčćąĖą║ čüąŠ čüčéčĆąĄą╗ą║ąŠą╣, ąĮą░ čüč鹊ą╣ą║ą░čģ čüąĘą░ą┤ąĖ čüčéą░ą▓ąĖą╝ čüčéą░čåąĖąŠąĮą░čĆąĮčāčÄ ą┐ą╗ą░čéčā, ą▓čüčéą░ą▓ą╗čÅąĄą╝ ąśąÜ-ą┤ąĖąŠą┤, ą▓čüąĄ čüąŠąĄą┤ąĖąĮčÅąĄą╝ ąĖ ą│ąŠč鹊ą▓ąŠ! ą£ąŠąČąĮąŠ ą▓ą║ą╗čÄčćą░čéčī! ąÆčüąĄ ą┤ąŠą╗ąČąĮąŠ ąĘą░čĆą░ą▒ąŠčéą░čéčī čüčĆą░ąĘčā. ąĢą┤ąĖąĮčüčéą▓ąĄąĮąĮąŠąĄ, ąĄčüą╗ąĖ ąĮąĄ ą┐ąŠą╣ą┤ąĄčé ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ąĮą░ čüčéčĆąĄą╗ą║čā, č鹊 ą╝ąŠąČąĄčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ ą┐ąŠą┤ą▒ąŠčĆ čĆąĄąĘąĖčüč鹊čĆą░ R28 ąĮą░ čüčéčĆąĄą╗ą║ąĄ. ąĀąĖčü. 11. ąōąŠč鹊ą▓ą░čÅ ą║ąŠąĮčüčéčĆčāą║čåąĖčÅ ąĀąĖčü. 12. ąōąŠč鹊ą▓ą░čÅ ą║ąŠąĮčüčéčĆčāą║čåąĖčÅ. ąÆąĖą┤ čüą▒ąŠą║čā ąÜą░ą║ ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čŹčéąĖą╝ čćčāą┤ąŠą╝ č鹥čģąĮąĖą║ąĖ. ąÉ ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąĖą╝ ą┐čĆąŠčüč鹊: čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĖą┤ąĄčé čü ą┐čāą╗čīčéą░. ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą║ąĮąŠą┐ąŠą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčüčāąĮą║ąĄ 13. ąĀąĖčü. 13. ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą║ąĮąŠą┐ąŠą║ ą┐čāą╗čīčéą░ (ą║ą╗ąĖą║ą░ą▒ąĄą╗čīąĮąŠ) ąÆ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ą║ąĮąŠą┐ą║ąĖ 0..9 ą▓čŗą▒ąĖčĆą░čÄčé čĆąĄąČąĖą╝ ąĖąĮą┤ąĖą║ą░čåąĖąĖ. ąøčÄą▒ą░čÅ ą║ąĮąŠą┐ą║ą░ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▓ą║ą╗čÄčćą░ąĄčé čĆąĄąČąĖą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ. ą¤čĆąĖ čŹč鹊ą╝ ą┐ąŠą┤čüą▓ąĄčćąĖą▓ą░ąĄčéčüčÅ ąĖąĘą╝ąĄąĮčÅąĄą╝čŗą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ. ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĘąĮą░č湥ąĮąĖčÅ – ą║ąĮąŠą┐ą║ąĖ 0…9, ą┐ąĄčĆąĄčģąŠą┤ ą║ ą┤čĆčāą│ąŠą╝čā ąĘąĮą░č湥ąĮąĖčÄ: P+ ąĖ P-. ąØčā, ą▓čĆąŠą┤ąĄ ą▓čüčæ čĆą░čüčüą║ą░ąĘą░ą╗))) ąóąĄą┐ąĄčĆčī ąĮąĄą╝ąĮąŠą│ąŠ č乊č鹊ą║))
ąĀąĖčü. 15. ąÆčŗą▓ąŠą┤ ą║ą░čĆčéąĖąĮąŠą║
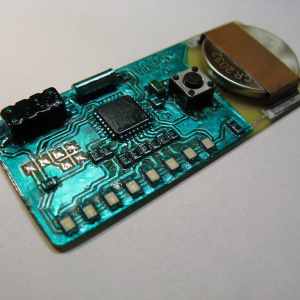
ąĀąĖčü. 16. ąĀąĄąČąĖą╝ ąĮą░čüčéčĆąŠąĄą║ ąĀąĖčü. 17. ąöąĮąĄą▓ąĮąŠą╣ (ą░) ąĖ ąĮąŠčćąĮąŠą╣ (ą▒) čĆąĄąČąĖą╝čŗ. ąĪčŖąĄą╝ą║ą░ ą▓ąĄą╗ą░čüčī ą┐čĆąĖ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą▓čŗą┤ąĄčƹȹ║ąĄ ąÜčüčéą░čéąĖ, ą┐ąŠ ą┐ąŠą▓ąŠą┤čā ąĮąŠčćąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░: čÅčĆą║ąŠčüčéčī čāą╝ąĄąĮčīčłą░ąĄčéčüčÅ ąĘą░ čüč湥čé čüąĮąĖąČąĄąĮąĖčÅ ą╝ąŠčēąĮąŠčüčéąĖ, ą┐ąŠą┤ą▓ąŠą┤ąĖą╝ąŠą╣ ą║ čéčĆą░ąĮčüč乊čĆą╝ą░č鹊čĆčā (ą┐čĆąĖ čŹč鹊ą╝ čéčĆą░ąĮčüč乊čĆą╝ą░č鹊čĆ ą┐ąŠ-ą┐čĆąĄąČąĮąĄą╝čā čĆą░ą▒ąŠčéą░ąĄčé ą▓ ą╝ąŠčüč鹊ą▓ąŠą╝ čĆąĄąČąĖą╝ąĄ). ąśąĘ-ąĘą░ ą┐ąŠąĮąĖąČąĄąĮąĖčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮą░ čüčéčĆąĄą╗ą║ąĄ, čā ąĮą░čü ą┐čĆąŠčüč鹊 ąĮą░čćąĖąĮą░čÄčé čéčāčüą║ą╗ąŠ čüą▓ąĄčéąĖčéčīčüčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ, ąĖ ąĮąĖą║ą░ą║ąŠą│ąŠ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą│ąŠ ą©ąśą£ą░ čĆąĄą░ą╗ąĖąĘąŠą▓čŗą▓ą░čéčī ąĮąĄ ąĮčāąČąĮąŠ))) ąöąĄčłąĄą▓ąŠ ąĖ čüąĄčĆą┤ąĖč鹊! ąØčā ąĖ ąĮą░ą┐ąŠčüą╗ąĄą┤ąŠą║ – ą┐čĆąŠč鹊čéąĖą┐čŗ. ąĪ č湥ą│ąŠ ą▓čüčæ ąĮą░čćąĖąĮą░ą╗ąŠčüčī)) ąĀąĖčü. 20. ąÜą░ą║ ą▓ą░čĆąĖą░ąĮčé ą║ąŠčĆą┐čāčüą░ (čüą░ą╝ąŠą┤ąĄą╗čīąĮčŗą╣, čüą┤ąĄą╗ą░ąĮ ąĮąĄ ą╗ą░ąĘąĄčĆąĮąŠą╣ čĆąĄąĘą║ąŠą╣) ąś, ą║ąŠąĮąĄčćąĮąŠ ąČąĄ, ą▓ąĖą┤ąĄąŠ: https://www.youtube.com/watch?v=aSexix0_GZM&feature=g-upl
ążą░ą╣ą╗čŗ: ąÆčüąĄ ą▓ąŠą┐čĆąŠčüčŗ ą▓ ążąŠčĆčāą╝.
ąŁčéąĖ čüčéą░čéčīąĖ ą▓ą░ą╝ č鹊ąČąĄ ą╝ąŠą│čāčé ą┐čĆąĖą│ąŠą┤ąĖčéčīčüčÅ: |
|
|||||||||||||||||||||||||
 |
 |


 |
||||


|
||||

















































ąĀą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī čüą░ą╣čéą░ ą┐čĆąŠą▓ąĄčĆąĄąĮą░ ą▓ ą▒čĆą░čāąĘąĄčĆą░čģ:
IE8.0, Opera 9.0, Netscape Navigator 7.0, Mozilla Firefox 5.0
ąÉą┤ą░ą┐čéąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą┐čĆąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅčģ 菹║čĆą░ąĮą░ ąŠčé 1280čģ1024 ąĖ ą▓čŗčłąĄ.
ą¤čĆąĖ ą╝ąĄąĮčīčłąĖčģ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅčģ ą▓ąŠąĘą╝ąŠąČąĮąŠ ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĄ ą│ąŠčĆąĖąĘąŠąĮčéą░ą╗čīąĮąŠą╣ ą┐čĆąŠą║čĆčāčéą║ąĖ.
ą¤ąŠ ą▓čüąĄą╝ ą▓ąŠą┐čĆąŠčüą░ą╝ ąŠą▒čĆą░čēą░ą╣č鹥čüčī ą║ ąÜąŠčéčā: kot@radiokot.ru
©2005-2026