 |
 |
|||||||||||||||
–û —Ä–∞–±–æ—Ç–µ —Å Bluetooth –º–æ–¥—É–ª—è–º–∏ AMS001/002 —Ñ–∏—Ä–º—ã Zentri
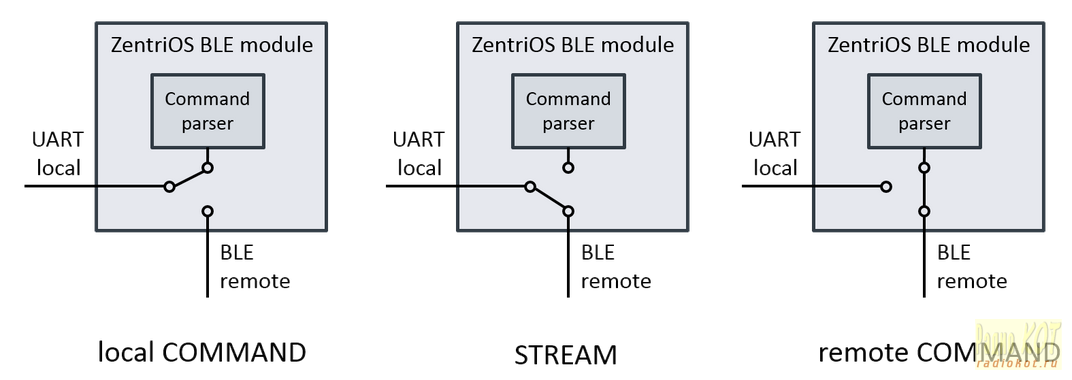
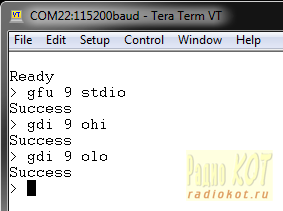
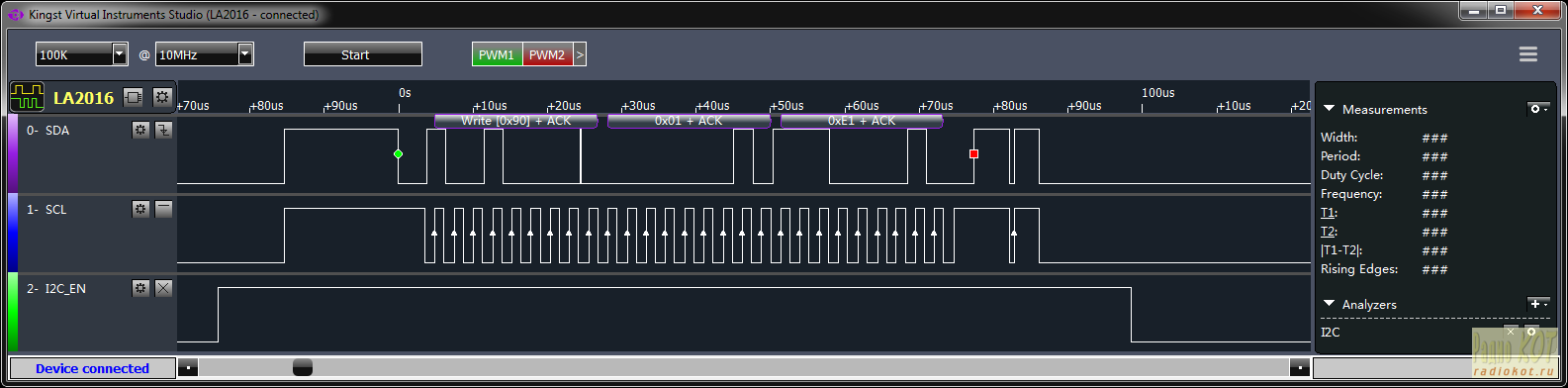
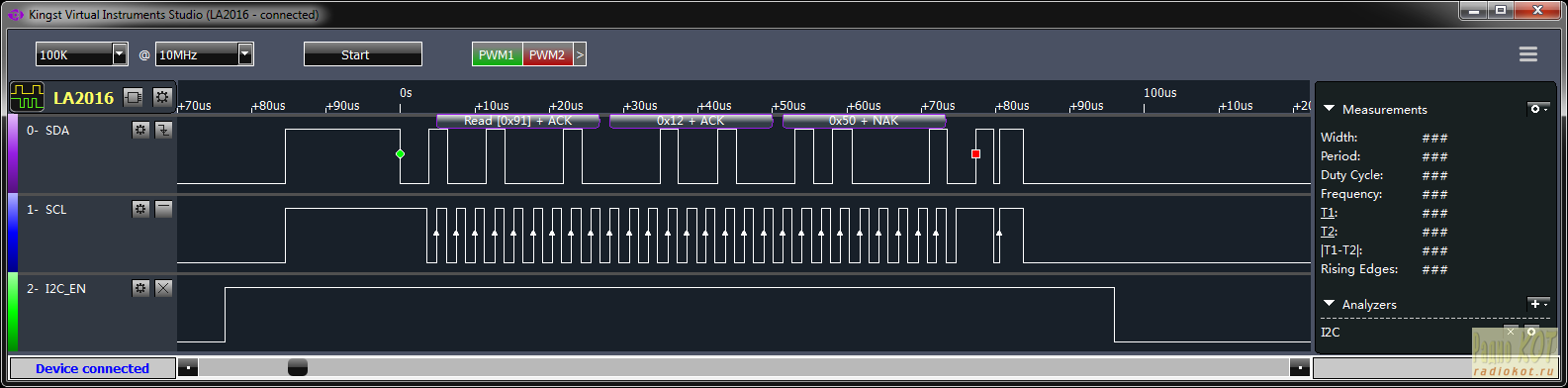
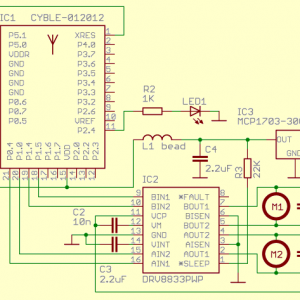
–ê–≤—Ç–æ—Ä: –°–µ—Ä–≥–µ–π –ë–µ–∑—Ä—É–∫–æ–≤ (aka Ser60) –§–∏—Ä–º–∞ Zentri, –Ω–µ–¥–∞–≤–Ω–æ –≤–æ—à–µ–¥—à–∞—è –≤ —Å–æ—Å—Ç–∞–≤ –∫–æ–º–ø–∞–Ω–∏–∏ Silicon Labs, –∏–∑–≤–µ—Å—Ç–Ω–∞ —Å–≤–æ–∏–º–∏ Bluetooth –∏ WiFi –º–æ–¥—É–ª—è–º–∏, –∏—Å–ø–æ–ª—å–∑—É—é—â–∏–º–∏ —É–Ω–∏–∫–∞–ª—å–Ω—ã–π –ø–æ–¥—Ö–æ–¥ –∫ —Ä–∞–∑—Ä–∞–±–æ—Ç–∫–µ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–π –Ω–∞ –∏—Ö –æ—Å–Ω–æ–≤–µ. –£–Ω–∏–∫–∞–ª—å–Ω–æ—Å—Ç—å —Å–æ—Å—Ç–æ–∏—Ç –≤ —É–ø—Ä–æ—â–µ–Ω–∏–∏ —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏ –ø–µ—Ä–µ–¥–∞—á–∏ –¥–∞–Ω–Ω—ã—Ö –∑–∞ —Å—á—ë—Ç –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏—è –ø—Ä–æ–≥—Ä–∞–º–º–Ω—ã—Ö –ø—Ä–æ–¥—É–∫—Ç–æ–≤ —Ñ–∏—Ä–º—ã, –∑–∞–≥—Ä—É–∂–∞–µ–º—ã—Ö –≤ –º–æ–¥—É–ª–∏ –≤–º–µ—Å—Ç–µ —Å–æ —Å—Ç–µ–∫–∞–º–∏ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—â–∏—Ö –ø—Ä–æ—Ç–æ–∫–æ–ª–æ–≤. –ù–æ, –∫–∞–∫ —ç—Ç–æ —á–∞—Å—Ç–æ –±—ã–≤–∞–µ—Ç –Ω–∞ –ø—Ä–∞–∫—Ç–∏–∫–µ, —á–µ–º –ø—Ä–æ—â–µ –æ–±—â–µ–Ω–∏–µ —Å –º–æ–¥—É–ª–µ–º, —Ç–µ–º –∂—ë—Å—Ç—á–µ –æ–≥—Ä–∞–Ω–∏—á–µ–Ω–∏—è –Ω–∞ –µ–≥–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏–µ –∏ –Ω–∏–∂–µ –≥–∏–±–∫–æ—Å—Ç—å. –û–¥–Ω–∞–∫–æ, –¥–ª—è –º–Ω–æ–≥–∏—Ö –Ω–µ—Å–ª–æ–∂–Ω—ã—Ö IoT –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–π –æ–≥—Ä–∞–Ω–∏—á–µ–Ω–∏—è —ç—Ç–∏ –≤–ø–æ–ª–Ω–µ –ø—Ä–∏–µ–º–ª–∏–º—ã, –∞ –ø—Ä–æ—Å—Ç–æ—Ç–∞ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏—è –ø—Ä–∏–≤–æ–¥–∏—Ç –∫ –±—ã—Å—Ç—Ä–æ–π —Ä–∞–∑—Ä–∞–±–æ—Ç–∫–µ —É—Å—Ç—Ä–æ–π—Å—Ç–≤ –¥–∞–∂–µ –ø—Ä–∏ –æ—Ç—Å—É—Ç—Å—Ç–≤–∏–∏ —É —Ä–∞–∑—Ä–∞–±–æ—Ç—á–∏–∫–∞ –Ω–∞–¥–ª–µ–∂–∞—â–∏—Ö –≥–ª—É–±–æ–∫–∏—Ö –∑–Ω–∞–Ω–∏–π –≤ –æ–±–ª–∞—Å—Ç–∏ –±–µ—Å–ø—Ä–æ–≤–æ–¥–Ω—ã—Ö —Ç–µ—Ö–Ω–æ–ª–æ–≥–∏–π. –ù–µ–∫–æ—Ç–æ—Ä—ã–µ WiFi –º–æ–¥—É–ª–∏ —Ñ–∏—Ä–º—ã –º–æ–≥—É—Ç –±—ã—Ç—å –∑–∞–ø—Ä–æ–≥—Ä–∞–º–º–∏—Ä–æ–≤–∞–Ω—ã –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è–º–∏, —Ä–∞–∑—Ä–∞–±–æ—Ç–∞–Ω–Ω—ã–º–∏ –≤ —Å—Ä–µ–¥–µ ZentriOS SDK —Ñ–∏—Ä–º—ã. –ü—Ä–∏ —ç—Ç–æ–º –¥–æ—Å—Ç–∏–≥–∞–µ—Ç—Å—è –º–∞–∫—Å–∏–º–∞–ª—å–Ω–∞—è —É–Ω–∏–≤–µ—Ä—Å–∞–ª—å–Ω–æ—Å—å –∏ –≥–∏–±–∫–æ—Å—Ç—å –Ω–∞—Å—Ç—Ä–æ–π–∫–∏ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–π. –û–¥–Ω–∞–∫–æ, Bluetooth –º–æ–¥—É–ª–∏ —ç—Ç–æ–π —Å–∏—Å—Ç–µ–º–æ–π –Ω–µ –ø–æ–¥–¥–µ—Ä–∂–∏–≤–∞—é—Ç—Å—è. –ù–∞ –º–æ–º–µ–Ω—Ç –Ω–∞–ø–∏—Å–∞–Ω–∏—è —Å—Ç–∞—Ç—å–∏ —É —Ñ–∏—Ä–º—ã –∏–º–µ–µ—Ç—Å—è –≤—Å–µ–≥–æ –¥–≤–∞ Bluetooth –º–æ–¥—É–ª—è – AMS001 –∏ AMS002. –û–±–∞ –º–æ–¥—É–ª—è —Å–µ—Ä—Ç–∏—Ñ–∏—Ü–∏—Ä–æ–≤–∞–Ω—ã –ø–æ–¥ –ø—Ä–æ—Ç–æ–∫–æ–ª Bluetooth 4.1 —Å –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ–π –º–æ—â–Ω–æ—Å—Ç—å—é –ø–µ—Ä–µ–¥–∞—á–∏ +4dBm –∏ –∏–º–µ—é—Ç —á—É–≤—Å—Ç–≤–∏—Ç–µ–ª—å–Ω–æ—Å—Ç—å -94dBm. –Ý–∞–∑–ª–∏—á–∞—é—Ç—Å—è –º–æ–¥—É–ª–∏ –Ω–∞–ª–∏—á–∏–µ–º –≤ –ø–µ—Ä–≤–æ–º –∏–∑ –Ω–∏—Ö –ø–æ–Ω–∏–∂–∞—é—â–µ–≥–æ DC-DC –∫–æ–Ω–≤–µ—Ä—Ç–µ—Ä–∞, —á—Ç–æ —Å–Ω–∏–∂–∞–µ—Ç —Å—Ä–µ–¥–Ω–µ–µ —Ç–æ–∫–æ–ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ –≤ 2 —Ä–∞–∑–∞ –∫–∞–∫ –≤ —Ä–µ–∂–∏–º–µ –ø—Ä–∏—ë–º–∞, —Ç–∞–∫ –∏ –ø–µ—Ä–µ–¥–∞—á–∏. –°–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–µ–Ω–Ω–æ, –æ–Ω –Ω–µ—Å–∫–æ–ª—å–∫–æ –¥–æ—Ä–æ–∂–µ –µ–≥–æ –º–ª–∞–¥—à–µ–≥–æ –±—Ä–∞—Ç–∞. –ó–¥–µ—Å—å —Ä–∞—Å—Å–º–æ—Ç—Ä–µ–Ω —Å–ø–æ—Å–æ–± –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏—è –º–æ–¥—É–ª–µ–π, —Ç—Ä–µ–±—É—é—â–∏–π –º–∏–Ω–∏–º–∞–ª—å–Ω–æ–≥–æ –æ–±—ä—ë–º–∞ –ø—Ä–æ–≥—Ä–∞–º–º–∏—Ä–æ–≤–∞–Ω–∏—è –ø—É—Ç—ë–º –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏—è –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å–∞ —Å –∑–∞–≥—Ä—É–∂–µ–Ω–Ω–æ–π –≤ –º–æ–¥—É–ª–∏ –ª–µ–≥–∫–æ–≤–µ—Å–Ω–æ–π –æ–ø–µ—Ä–∞—Ü–∏–æ–Ω–Ω–æ–π —Å–∏—Å—Ç–µ–º–æ–π ZentriOS-S. –ü–æ–∂–∞–ª—É–π, –æ–ø–µ—Ä–∞—Ü–∏–æ–Ω–Ω–∞—è —Å–∏—Å—Ç–µ–º–∞ —Å–ª–∏—à–∫–æ–º –≥—Ä–æ–º–∫–æ–µ –Ω–∞–∑–≤–∞–Ω–∏–µ –¥–ª—è —ç—Ç–æ–≥–æ –ø—Ä–æ–≥—Ä–∞–º–º–Ω–æ–≥–æ –ø—Ä–æ–¥—É–∫—Ç–∞. –ò—Ö —É —Ñ–∏—Ä–º—ã –∏–º–µ–µ—Ç—Å—è –Ω–µ—Å–∫–æ–ª—å–∫–æ –∏ –æ—Ä–∏–µ–Ω—Ç–∏—Ä–æ–≤–∞–Ω—ã –æ–Ω–∏ –ø–æ–¥ –æ–ø—Ä–µ–¥–µ–ª—ë–Ω–Ω—É—é –æ–±–ª–∞—Å—Ç—å –ø—Ä–∏–º–µ–Ω–µ–Ω–∏—è –∏ –ø–µ—Ä–∏—Ñ–µ—Ä–∏—é –≤–Ω—É—Ç—Ä–µ–Ω–Ω–µ–≥–æ –ú–ö. –° —Ñ–∞–±—Ä–∏–∫–∏ –º–æ–¥—É–ª–∏ –ø—Ä–∏—Ö–æ–¥—è—Ç —Å —É—Å—Ç–∞–Ω–æ–≤–ª–µ–Ω–Ω—ã–º –ø—Ä–æ–≥—Ä–∞–º–º–Ω—ã–º –ø—Ä–æ–¥—É–∫—Ç–æ–º Zentri-AMS001/002. –ü—Ä–æ–¥—É–∫—Ç, –∫o—Ç–æ—Ä—ã–π –º—ã –±—É–¥–µ–º –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –Ω–∞–∑—ã–≤–∞–µ—Ç—Å—è Zentri-I2CM. –û–Ω –ø–æ–∑–≤–æ–ª—è–µ—Ç –º–æ–¥—É–ª—é —Ä–∞–±–æ—Ç–∞—Ç—å –≤ —Ä–æ–ª–∏ Peripheral –∏ –≤–∫–ª—é—á–∞–µ—Ç –¥—Ä–∞–π–≤–µ—Ä –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å–∞ I2C – –æ—Ç—Å—é–¥–∞ –∏ –µ–≥–æ –Ω–∞–∑–≤–∞–Ω–∏–µ. –î–µ—Ç–∞–ª–∏ –æ –¥—Ä—É–≥–∏—Ö –ø—Ä–æ–¥—É–∫—Ç–∞—Ö —Ñ–∏—Ä–º—ã –º–æ–∂–Ω–æ –Ω–∞–π—Ç–∏ –ø–æ —Å—Å—ã–ª–∫–µ [1]. –î–ª—è –∑–∞–≥—Ä—É–∑–∫–∏ –∫–∞–∂–¥–æ–≥–æ –ø—Ä–æ–≥—Ä–∞–º–º–Ω–æ–≥–æ –ø—Ä–æ–¥—É–∫—Ç–∞ —É —Ñ–∏—Ä–º—ã –∏–º–µ–µ—Ç—Å—è –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–µ Zentri BLE Manager –¥–ª—è iOS/Android —Å–º–∞—Ä—Ç—Ñ–æ–Ω–æ–≤ –∏ –ø–ª–∞–Ω—à–µ—Ç–æ–≤ –ü–æ–¥—Ä–æ–±–Ω–µ–µ –æ —Ä–∞–±–æ—Ç–µ —Å –Ω–∏–º –º–æ–∂–Ω–æ –ø—Ä–æ—á–∏—Ç–∞—Ç—å –ø–æ —Å—Å—ã–ª–∫–µ [2], –≥–¥–µ –≤—Å—ë –ø–æ–¥—Ä–æ–±–Ω–æ —Ä–∞—Å–ø–∏—Å–∞–Ω–æ –≤ –∫–∞—Ä—Ç–∏–Ω–∫–∞—Ö. –î–ª—è –∑–∞–≥—Ä—É–∑–∫–∏ –Ω–æ–≤–æ–≥–æ –ø—Ä–æ–¥—É–∫—Ç–∞ –≤ –º–æ–¥—É–ª—å —Å–ª–µ–¥—É–µ—Ç —Å–æ–∑–¥–∞—Ç—å –∞–∫–∫–∞—É–Ω—Ç –Ω–∞ —Å–∞–π—Ç–µ Zentri DMS [3], –∑–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞—Ç—å —Ç–∞–º —Å–≤–æ–π –º–æ–¥—É–ª—å, –∏ –¥–∞–ª–µ–µ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –∞–∫–∫–∞—É–Ω—Ç –¥–ª—è OTA (Over The Air) –∞–ø–¥–µ–π—Ç–æ–≤. –≠—Ç–æ –µ–¥–∏–Ω—Å—Ç–≤–µ–Ω–Ω—ã–π —Å–ø–æ—Å–æ–± –∑–∞–≥—Ä—É–∑–∏—Ç—å –≤ –º–æ–¥—É–ª—å –∏–Ω–æ–π –ø—Ä–æ–≥—Ä–∞–º–º–Ω—ã–π –ø—Ä–æ–¥—É–∫—Ç —Ñ–∏—Ä–º—ã. –ü—Ä–∏ —ç—Ç–æ–º –±—É–¥–µ—Ç –∑–∞–¥–µ–π—Å—Ç–≤–æ–≤–∞–Ω –í–∞—à —Å–º–∞—Ä—Ç –¥–µ–≤–∞–π—Å, –∫–æ—Ç–æ—Ä—ã–π –¥–æ–ª–∂–µ–Ω –∏–º–µ—Ç—å –ø–æ–¥–¥–µ—Ä–∂–∫—É WiFi –∏ Bluetooth 4.1+, –ø–æ—Å–∫–æ–ª—å–∫—É –∑–∞–≥—Ä—É–∑–∫–∞ –ü–û –±—É–¥–µ—Ç –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—å—Å—è –≤ –º–æ–¥—É–ª—å —á–µ—Ä–µ–∑ –Ω–µ–≥–æ. –û—Ç–º–µ—á—É, —á—Ç–æ —É –º–µ–Ω—è –±—ã–ª–∏ –ø—Ä–æ–±–ª–µ–º—ã —Å –∑–∞–≥—Ä—É–∑–∫–æ–π –ü–û, –≤—ã—Ç—è–Ω—É–≤—à–∏–µ—Å—è –≤ –º–µ—Å—è—á–Ω—É—é –ø–µ—Ä–µ–ø–∏—Å–∫—É —Å —Ç–µ—Ö-–ø–æ–¥–¥–µ—Ä–∂–∫–æ–π —Ñ–∏—Ä–º—ã. –ú—ã –Ω–∏–∫–∞–∫ –Ω–µ –º–æ–≥–ª–∏ –ø–æ–Ω—è—Ç—å –ø–æ—á–µ–º—É —É –Ω–∏—Ö –≤—Å—ë —Ä–∞–±–æ—Ç–∞–µ—Ç, –∞ —É –º–µ–Ω—è, –Ω–µ—Å–º–æ—Ç—Ä—è –Ω–∞ –∏—Ö —Å–æ–≤–µ—Ç—ã - –Ω–µ—Ç, –∫–∞–∫–∏–µ-–±—ã —Ç–µ–ª–µ—Ñ–æ–Ω—ã –∏ –ø—Ä. —è –Ω–µ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–ª. –í –∫–æ–Ω—Ü–µ –∫–æ–Ω—Ü–æ–≤, –º–Ω–µ –ø—Ä–∏—à–ª–æ—Å—å –≤—ã—Å–ª–∞—Ç—å –∏–º —Å–≤–æ–∏ «–ø—Ä–æ–±–ª–µ–º–Ω—ã–µ» –º–æ–¥—É–ª–∏. –û–∫–∞–∑–∞–ª–æ—Å—å, –ø—Ä–∏—á–∏–Ω–∞ –±—ã–ª–∞ –≤—Å—ë-–∂–µ –≤ –∏—Ö –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–∏ Zentri BLE Manager. –°–µ–π—á–∞—Å –æ–Ω–∏ –µ–≥–æ –ø–æ–¥–ø—Ä–∞–≤–∏–ª–∏ –∏ –≤—Å—ë –∑–∞–≥—Ä—É–∂–∞–µ—Ç—Å—è –±–µ–∑ –ø—Ä–æ–±–ª–µ–º. –¢–µ—Ö-–ø–æ–¥–¥–µ—Ä–∂–∫–∞ —Ñ–∏—Ä–º—ã —Ä–µ–∞–ª—å–Ω–æ —Ä–∞–±–æ—Ç–∞–µ—Ç –∏ –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ –±—ã—Å—Ç—Ä–æ. –î–ª—è —Ä–∞–±–æ—Ç—ã —Å –º–æ–¥—É–ª—è–º–∏ –±—ã–ª–∞ —Å–æ–±—Ä–∞–Ω–∞ —Å–ª–µ–¥—É—é—â–∞—è —Ç–µ—Å—Ç–æ–≤–∞—è —Å—Ö–µ–º–∞. –° –ø–æ–º–æ—â—å—é –º–æ–¥—É–ª—è IC1, —Ü–µ–ª—å—é —è–≤–ª—è–µ—Ç—Å—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏—è –¥–∏—Å—Ç–∞–Ω—Ü–∏–æ–Ω–Ω–æ–≥–æ –≤–∫–ª—é—á–µ–Ω–∏—è/–≤—ã–∫–ª—é—á–µ–Ω–∏—è —Å–≤–µ—Ç–æ–¥–∏–æ–¥–∞ LED1 –∏ —á—Ç–µ–Ω–∏—è —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—ã —Å –¥–∞—Ç—á–∏–∫–∞ IC3. –ú–∏–∫—Ä–æ—Å—Ö–µ–º–∞ IC2 –ø—Ä–µ–¥—Å—Ç–∞–≤–ª—è–µ—Ç —Å–æ–±–æ–π —Å–¥–≤–æ–µ–Ω–Ω—ã–π –∫–ª—é—á –¥–ª—è –æ—Ç–∫–ª—é—á–µ–Ω–∏—è –≤—ã–≤–æ–¥–æ–≤ 4 –∏ 5 –º–æ–¥—É–ª—è –æ—Ç —à–∏–Ω—ã I2C, –ø–æ—Å–∫–æ–ª—å–∫—É –≤ –ø–µ—Ä–µ—Ä—ã–≤–∞—Ö –º–µ–∂–¥—É —Ä–∞–±–æ—Ç–æ–π I2C –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å–∞ –º–æ–¥—É–ª—è –Ω–∞ —ç—Ç–∏—Ö –≤—ã–≤–æ–¥–∞—Ö –ø—Ä–∏—Å—É—Ç—Å—Ç–≤—É–µ—Ç —É—Ä–æ–≤–µ–Ω—å –ª–æ–≥. –Ω—É–ª—è. –ö–ª—é—á —É–ø—Ä–∞–≤–ª—è–µ—Ç—Å—è –¥—Ä–∞–π–≤–µ—Ä–æ–º I2C –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏ —á–µ—Ä–µ–∑ –≤—ã–≤–æ–¥ 13 –º–æ–¥—É–ª—è. –í —á—ë–º –º—É–¥—Ä–æ—Å—Ç—å –∏–ª–∏ –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ—Å—Ç—å —ç—Ç–æ–≥–æ —Ä–µ—à–µ–Ω–∏—è —è –Ω–µ –ø–æ–Ω—è–ª, –Ω–æ —Ç–∞–∫–æ–≤—ã –ø—Ä–∞–≤–∏–ª–∞ –∏–≥—Ä—ã. –ù–∞ —Ç–µ—Å—Ç–æ–≤–æ–π –ø–ª–∞—Ç–µ (—Å–º. —Ñ–æ—Ç–æ –Ω–∏–∂–µ) –∫–ª—é—á IC2 —Ä–∞–¥–∏ –ø—Ä–æ—Å—Ç–æ—Ç—ã –Ω–µ —É—Å—Ç–∞–Ωo–≤–ª–µ–Ω –∏ —Ä–µ–∑–∏—Å—Ç–æ—Ä—ã R2 –∏ R3 –Ω–µ–ø–æ—Å—Ä–µ–¥—Å—Ç–≤–µ–Ω–Ω–æ —Å–æ–µ–¥–∏–Ω–µ–Ω—ã —Å —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—â–∏–º–∏ –≤—ã–≤–æ–¥–∞–º–∏ –º–æ–¥—É–ª—è. –î–ª—è –ø—Ä–µ–¥–≤–∞—Ä–∏—Ç–µ–ª—å–Ω–æ–≥–æ –∑–Ω–∞–∫–æ–º—Å—Ç–≤–∞ —Å –º–æ–¥—É–ª–µ–º –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–ª—Å—è –ø–æ—Å–ª–µ–¥–æ–≤–∞—Ç–µ–ª—å–Ω—ã–π –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å —Å–≤—è–∑–∏ —Å –Ω–∏–º —á–µ—Ä–µ–∑ USB-UART –º–æ—Å—Ç –Ω–∞ –æ—Å–Ω–æ–≤–µ CP2104 (–Ω–∞ —Å—Ö–µ–º–µ –ø–æ–∫–∞–∑–∞–Ω –ø—É–Ω–∫—Ç–∏—Ä–æ–º). –ß–µ—Ä–µ–∑ —ç—Ç–æ—Ç –ø—Ä–æ–≤–æ–¥–Ω–æ–π –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å (–∞ —Ç–∞–∫–∂–µ —á–µ—Ä–µ–∑ –±–µ–∑–ø—Ä–æ–≤–æ–¥–Ω—ã–π Bluetooth) –≤ –º–æ–¥—É–ª—å –º–æ–∂–Ω–æ –ø–æ—Å—ã–ª–∞—Ç—å –∫–æ–º–∞–Ω–¥—ã –∏–ª–∏ –∏–∑–º–µ–Ω—è—Ç—å –∑–Ω–∞—á–µ–Ω–∏—è –µ–≥–æ –ø–µ—Ä–µ–º–µ–Ω–Ω—ã—Ö. –ü–æ—Å–ª–µ–¥–Ω–∏–µ –º–æ–∂–Ω–æ —Å–æ—Ö—Ä–∞–Ω–∏—Ç—å –≤ —ç–Ω–µ—Ä–≥–æ-–Ω–µ–∑–∞–≤–∏—Å–∏–º–æ–π –ø–∞–º—è—Ç–∏ –º–æ–¥—É–ª—è. –ü—Ä–∏–º–µ—Ä–∞–º–∏ –∫–æ–º–∞–Ω–¥ —è–≤–ª—è—é—Ç—Å—è —É—Å—Ç–∞–Ω–æ–≤–∫–∞ –∏ —á—Ç–µ–Ω–∏–µ –ª–æ–≥–∏—á–µ—Å–∫–∏—Ö —É—Ä–æ–≤–Ω–µ–π –Ω–∞ –≤—ã–≤o–¥–∞—Ö GPIO, –≥–µ–Ω–µ—Ä–∞—Ü–∏—è PWM, –∫–æ–º–º—É–Ω–∏–∫–∞—Ü–∏—è —Å –≤–Ω–µ—à–Ω–∏–º–∏ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞–º–∏ —á–µ—Ä–µ–∑ –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å—ã I2C, SPI, –∏.—Ç.–¥. –í—Å–µ–≥–æ –∏–º–µ–µ—Ç—Å—è 3 —Ä–µ–∂–∏–º–∞ —Ä–∞–±–æ—Ç—ã –º–æ–¥—É–ª—è: –ª–æ–∫–∞–ª—å–Ω—ã–π –∫–æ–º–∞–Ω–¥–Ω—ã–π —Ä–µ–∂–∏–º (local command), —Ä–µ–∂–∏–º –ø–æ—Ç–æ–∫–æ–≤–æ–π –ø–µ—Ä–µ–¥–∞—á–∏ –¥–∞–Ω–Ω—ã—Ö (stream), –∏ —É–¥–∞–ª—ë–Ω–Ω—ã–π –∫–æ–º–∞–Ω–¥–Ω—ã–π —Ä–µ–∂–∏–º (remote command). –§—É–Ω–∫—Ü–∏–æ–Ω–∏—Ä–æ–≤–∞–Ω–∏–µ –º–æ–¥—É–ª—è –≤ —ç—Ç–∏—Ö —Ä–µ–∂–∏–º–∞—Ö –≥—Ä–∞—Ñ–∏—á–µ—Å–∫–∏ –ø—Ä–µ–¥—Å—Ç–∞–≤–ª–µ–Ω–æ –Ω–∏–∂–µ: –í –ø–µ—Ä–≤–æ–º —Ä–µ–∂–∏–º–µ –ø–æ–¥–∞—á–∞ –∫–æ–º–∞–Ω–¥ –≤ –∫–æ–º–∞–Ω–¥–Ω—ã–π –ø—Ä–æ—Ü–µ—Å—Å–æ—Ä –º–æ–¥—É–ª—è –æ—Å—É—â–µ—Å—Ç–≤–ª—è–µ—Ç—Å—è —á–µ—Ä–µ–∑ –ø—Ä–æ–≤–æ–¥–Ω–æ–π UART –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å –∏ –≤—ã–≤–æ–¥—ã GPIO2/3. –í–æ —Ç—Ä–µ—Ç—å–µ–º – —Ç–æ–∂–µ —Å–∞–º–æ–µ, –Ω–æ —á–µ—Ä–µ–∑ –±–µ–∑–ø—Ä–æ–≤–æ–¥–Ω—ã–π Bluetooth –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å. –í–æ –≤—Ç–æ—Ä–æ–º —Ä–µ–∂–∏–º–µ –º–æ–¥—É–ª—å —Ä–∞–±–æ—Ç–∞–µ—Ç –∫–∞–∫ UART-Bluetooth –º–æ—Å—Ç: –≤—Å—ë, —á—Ç–æ –æ–Ω –ø—Ä–∏–Ω–∏–º–∞–µ—Ç —á–µ—Ä–µ–∑ Bluetooth –ø–µ—Ä–µ–¥–∞—ë—Ç—Å—è –Ω–∞ UART –≤—ã–≤–æ–¥—ã –∏ –Ω–∞–æ–±–æ—Ä–æ—Ç, –º–∏–Ω—É—è –∏–Ω—Ç–µ—Ä–ø—Ä–µ—Ç–∞—Ç–æ—Ä –∫–æ–º–∞–Ω–¥. –ü–æ–¥—Ä–æ–±–Ω–µ–µ –æ–± —ç—Ç–∏—Ö —Ä–µ–∂–∏–º–∞—Ö –∏ –ø–µ—Ä–µ—Ö–æ–¥–∞—Ö –∏–∑ –æ–¥–Ω–æ–≥–æ –≤ –¥—Ä—É–≥–æ–π –º–æ–∂–Ω–æ –ø—Ä–æ—á–∏—Ç–∞—Ç—å –ø–æ —Å—Å—ã–ª–∫–µ [4]. –ó–¥–µ—Å—å –±—É–¥–µ—Ç —Ä–∞—Å—Å–∫–∞–∑–∞–Ω–æ –æ–± –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏–∏ –º–æ–¥—É–ª—è –≤ –∫–∞–∂–¥–æ–º –∏–∑ —ç—Ç–∏—Ö —Ä–µ–∂–∏–º–æ–≤. –Ý–∞–±–æ—Ç–∞ —Å –º–æ–¥—É–ª–µ–º —á–µ—Ä–µ–∑ –ª–æ–∫–∞–ª—å–Ω—ã–π UART –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å –î–ª—è —Ä–∞–±–æ—Ç—ã –≤ —ç—Ç–æ–º —Ä–µ–∂–∏–º–µ –ø—Ä–µ–¥–ø–æ–ª–∞–≥–∞–µ—Ç—Å—è –¥–æ–ø–æ–ª–Ω–∏—Ç—å –º–æ–¥—É–ª—å —É—Å—Ç—Ä–æ–π—Å—Ç–≤–æ–º —Å–≤—è–∑–∏ —á–µ—Ä–µ–∑ UART. –≠—Ç–æ –º–æ–∂–µ—Ç –±—ã—Ç—å, –Ω–∞–ø—Ä–∏–º–µ—Ä, –≤–Ω–µ—à–Ω–∏–π –ú–ö, –ø–µ—Ä–µ–¥–∞—é—â–∏–π –∫–æ–º–∞–Ω–¥—ã –º–æ–¥—É–ª—é –∏ –ø—Ä–∏–Ω–∏–º–∞—é—â–∏–π –∏ –¥–µ–∫–æ–¥–∏—Ä—É—é—â–∏–π –µ–≥–æ –æ—Ç–≤–µ—Ç—ã, –∏/–∏–ª–∏ –∏–∑–º–µ–Ω—è—é—â–∏–π –Ω–∞—Å—Ç—Ä–æ–π–∫–∏ –º–æ–¥—É–ª—è —É—Å—Ç–∞–Ω–æ–≤–∫–æ–π –∑–Ω–∞—á–µ–Ω–∏–π –µ–≥–æ –ø–µ—Ä–µ–º–µ–Ω–Ω—ã—Ö. –í –Ω–∞—à–µ–º —Å–ª—É—á–∞–µ –≤ –∫–∞—á–µ—Å—Ç–≤–µ —Ç–∞–∫–æ–≥–æ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞ —è –∑–∞–¥–µ–π—Å—Ç–≤–æ–≤–∞–ª —Ç–µ—Ä–º–∏–Ω–∞–ª—å–Ω—É—é –ø—Ä–æ–≥—Ä–∞–º–º—É TeraTerm –∏ –≤–≤–æ–¥–∏–ª –∫–æ–º–∞–Ω–¥—ã –º–æ–¥—É–ª—é —á–µ—Ä–µ–∑ –∫–ª–∞–≤–∏–∞—Ç—É—Ä—É –∫–æ–º–ø—å—é—Ç–µ—Ä–∞ –∏ USB-UART –∫–æ–Ω–≤–µ—Ä—Ç–µ—Ä. –î–ª—è –Ω–∞—á–∞–ª–∞ –ø–æ–ª–µ–∑–Ω–æ –±—É–¥–µ—Ç –æ–∑–Ω–∞–∫–æ–º–∏—Ç—å—Å—è –∫–∞–∫–∏–µ –ø–µ—Ä–µ–º–µ–Ω–Ω—ã–µ –∏–º–µ—é—Ç—Å—è –≤ –Ω–∞—Å—Ç—Ä–æ–π–∫–∞—Ö –º–æ–¥—É–ª—è –∏ –Ω–∞ —á—Ç–æ –æ–Ω–∏ –≤–ª–∏—è—é—Ç. –ü—Ä–∏ –ø–æ–¥–∞—á–µ –∫–æ–º–∞–Ω–¥—ã get al –º–æ–¥—É–ª—å –≤—ã–≤–æ–¥–∏—Ç –Ω–∞ —ç–∫—Ä–∞–Ω —Ç–µ—Ä–º–∏–Ω–∞–ª–∞ –∑–Ω–∞—á–µ–Ω–∏—è –≤—Å–µ—Ö —Å–≤–æ–∏—Ö –ø–µ—Ä–µ–º–µ–Ω–Ω—ã—Ö, –∫–∞–∫ –ø–æ–∫–∞–∑–∞–Ω–æ –Ω–∏–∂–µ. –ò–∑ –Ω–∏—Ö –∏–º–µ–Ω–∞, –Ω–∞—á–∏–Ω–∞—é—â–∏–µ—Å—è —Å bl, —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—Ç –Ω–∞—Å—Ç—Ä–æ–π–∫–∞–º Bluetooth —á–∞—Å—Ç–∏. –¢–µ, —á—Ç–æ –Ω–∞—á–∏–Ω–∞—é—Ç—Å—è —Å bu —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—Ç bus usage, –≤ –Ω–∞—à–µ–º —Å–ª—É—á–∞–µ —É—Å—Ç–∞–æ–≤–ª–µ–Ω —Ä–µ–∂–∏–º –ø–æ–¥–∞—á–∏ –ª–æ–∫–∞–ª—å–Ω—ã—Ö –∫–æ–º–º–∞–Ω–¥ —á–µ—Ä–µ–∑ UART. –î–∞–ª–µ–µ –∏–¥—ë—Ç –ø–µ—Ä–µ—á–∏—Å–ª–µ–Ω–∏–µ —Ñ—É–Ω–∫—Ü–∏–π, —Ä–µ–∞–ª–∏–∑–æ–≤–∞–Ω–Ω—ã—Ö –Ω–∞ –∫–∞–∂–¥–æ–º –∏–∑ 15 –≤—ã–≤–æ–¥–æ–≤ GPIO, –∏ –≤ –∫–æ–Ω—Ü–µ – –≤—Å—è–∫–∏–µ —Å–∏—Å—Ç–µ–º–Ω—ã–µ –Ω–∞—Å—Ç—Ä–æ–π–∫–∏. –ü–æ–¥—Ä–æ–±–Ω–µ–µ –æ –∑–Ω–∞—á–µ–Ω–∏—è—Ö –ø–µ—Ä–µ–º–µ–Ω–Ω—ã—Ö –∏ –∏—Ö –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏–∏ –º–æ–∂–Ω–æ –ø—Ä–æ—á–∏—Ç–∞—Ç—å –ø–æ —Å—Å—ã–ª–∫–µ [5]. –¢–∞–∫–∏–º –æ–±—Ä–∞–∑–æ–º, –≤ —ç—Ç–∏—Ö –º–æ–¥—É–ª—è—Ö –º–æ–∂–Ω–æ –ª–∏—à—å –∏–∑–º–µ–Ω—è—Ç—å –∑–Ω–∞—á–µ–Ω–∏—è –≤—ã—à–µ–ø–µ—Ä–µ—á–∏—Å–ª–µ–Ω–Ω—ã—Ö –ø–µ—Ä–µ–º–µ–Ω–Ω—ã—Ö –∏ –Ω–µ—Ç –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç–∏ —Å–æ—Ö—Ä–∞–Ω–∏—Ç—å –≤ –º–æ–¥—É–ª–µ –∏–Ω—ã—Ö –¥–∞–Ω–Ω—ã—Ö –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª—è. –ö–∞–∫ —è —É–∂–µ —É–ø–æ–º–∏–Ω–∞–ª, –ø–æ–º–∏–º–æ –∑–Ω–∞—á–µ–Ω–∏–π –ø–µ—Ä–µ–º–µ–Ω–Ω—ã—Ö –≤ –º–æ–¥—É–ª—å –º–æ–∂–Ω–æ –ø–æ—Å—ã–ª–∞—Ç—å –∏ –∫–æ–º–∞–Ω–¥—ã. –°–ø–∏—Å–æ–∫ –∫–æ–º–∞–Ω–¥ –∏ –∏—Ö —Å–∏–Ω—Ç–∞–∫—Å–∏—Å –¥–æ—Å—Ç—É–ø–µ–Ω –ø–æ —Å—Å—ã–ª–∫–µ [6]. –í —á–∞—Å—Ç–Ω–æ—Å—Ç–∏, –¥–ª—è –º–∏–≥–∞–Ω–∏—è —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º —á–µ—Ä–µ–∑ UART –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å —Å–ª–µ–¥—É–µ—Ç –ø—Ä–æ–¥–µ–ª–∞—Ç—å —Å–ª–µ–¥—É—é—â–µ–µ: 1. –ù–∞—Å—Ç—Ä–æ–∏—Ç—å –≤—ã–≤–æ–¥ –ø–æ—Ä—Ç–∞, –ø–æ–¥–∫–ª—é—á—ë–Ω–Ω—ã–π –∫ —Å–≤–µ—Ç–æ–¥–∏–æ–¥—É (GPIO9 –≤ –Ω–∞—à–µ–º —Å–ª—É—á–∞–µ), –Ω–∞ —Ä–∞–±–æ—Ç—É –≤ —Ä–µ–∂–∏–º–µ stdio –ø–æ–¥–∞—á–µ–π –∫–æ–º–∞–Ω–¥—ã gfu 9 stdio –ù–∞ —Ç–µ—Ä–º–∏–Ω–∞–ª–µ —ç—Ç–æ –≤—ã–≥–ª—è–¥–∏—Ç —Å–ª–µ–¥—É—é—â–∏–º –æ–±—Ä–∞–∑–æ–º: –ö–∞–∫ –≤–∏–¥–Ω–æ, –º–æ–¥—É–ª—å –ø–æ–¥—Ç–≤–µ—Ä–∂–¥–∞–µ—Ç –≤—ã–ø–æ–ª–Ω–µ–Ω–∏–µ –∫–∞–∂–¥–æ–π –∫–æ–º–∞–Ω–¥—ã (—ç—Ç—É –æ–ø—Ü–∏—é –º–æ–∂–Ω–æ –æ—Ç–∫–ª—é—á–∏—Ç—å). –ú–æ–∂–µ—Ç–µ –ø–æ–≤–µ—Ä–∏—Ç—å –º–Ω–µ –Ω–∞ —Å–ª–æ–≤–æ, —á—Ç–æ —Å–≤–µ—Ç–æ–¥–∏–æ–¥ –ø—Ä–∏ —ç—Ç–æ–º –¥–µ–π—Å—Ç–≤–∏—Ç–µ–ª—å–Ω–æ –º–∏–≥–∞–µ—Ç. –î–ª—è –ø–æ—Å–ª–µ–¥—É—é—â–µ–≥–æ –º–∏–≥–∞–Ω–∏—è –ø–µ—Ä–≤—É—é –∫–æ–º–∞–Ω–¥—É –º–æ–∂–Ω–æ –Ω–µ –ø–æ–¥–∞–≤–∞—Ç—å, —Ç.–∫. –≤—ã–≤–æ–¥ –ø–æ—Ä—Ç–∞ —É–∂–µ –Ω–∞—Å—Ç—Ä–æ–µ–Ω. –ú–æ–∂–Ω–æ —Å–æ—Ö—Ä–∞–Ω–∏—Ç—å —ç—Ç—É –Ω–∞—Å—Ç—Ä–æ–π–∫—É –≤ –ø–∞–º—è—Ç–∏ –º–æ–¥—É–ª—è –ø–æ–¥–∞—á–µ–π –∫–æ–º–∞–Ω–¥—ã save. –ü—Ä–∏ —ç—Ç–æ–º –ø–æ—Å–ª–µ —Å–ª–µ–¥—É—é—â–µ–≥–æ —Å–±—Ä–æ—Å–∞ –º–æ–¥—É–ª—è –µ–≥–æ –ø–æ—Ä—Ç GPIO9 —É–∂–µ –±—É–¥–µ—Ç –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏ –Ω–∞—Å—Ç—Ä–æ–µ–Ω –Ω–∞ —Ä–µ–∂–∏–º stdio. –î–ª—è –≤—ã–¥–∞—á–∏ –Ω–∞ —Ç–µ—Ä–º–∏–Ω–∞–ª –∑–Ω–∞—á–µ–Ω–∏—è —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—ã —Å–ª–µ–¥—É–µ—Ç –ø–æ—Å—ã–ª–∞—Ç—å –≤ –º–æ–¥—É–ª—å –∫–æ–º–∞–Ω–¥—ã, –∏–º–µ—é—â–∏–µ —Ç–∞–∫–∂–µ —Å–º—ã—Å–ª –∏ –¥–ª—è –¥–∞—Ç—á–∏–∫–∞ —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—ã. –í —Å–ª—É—á–∞–µ TMP112 –¥–ª—è —ç—Ç–æ–≥–æ —Å–ª–µ–¥—É–µ—Ç: 1. –ù–∞—Å—Ç—Ä–æ–∏—Ç—å –¥–∞—Ç—á–∏–∫ –Ω–∞ –ø—Ä–æ–∏–∑–≤–æ–¥—Å—Ç–≤–æ –µ–¥–∏–Ω–∏—á–Ω–æ–≥–æ –∏–∑–º–µ—Ä–µ–Ω–∏—è —Å –ø–æ—Å–ª–µ–¥—É—é—â–∏–º —É—Ö–æ–¥–æ–º –≤ —Å–æ–Ω. –î–ª—è —ç—Ç–æ–≥–æ –≤ –µ–≥–æ —Ä–µ–≥–∏—Å—Ç—Ä —Å –∞–¥—Ä–µ—Å–æ–º 01 –Ω—É–∂–Ω–æ –∑–∞–≥—Ä—É–∑–∏—Ç—å –∫–æ–¥ 0—Ö–ï1. –ü—Ä–∏ –∑–∞–∑–µ–º–ª–µ–Ω–∏–∏ –≤—ã–≤–æ–¥–∞ 4 –¥–∞—Ç—á–∏–∫–∞ –µ–≥–æ I2C –∞–¥—Ä–µ—Å, —Å–æ–≥–ª–∞—Å–Ω–æ –î–®, –±—É–¥–µ—Ç 72 (0x48). –ü–æ—Å—ã–ª–∞–µ–º –≤ –º–æ–¥—É–ª—å –∫–æ–º–∞–Ω–¥—É i2cwr 72 hex 01 e1. –ù–∞ –ª–æ–≥–∏—á–µ—Å–∫–æ–º –∞–Ω–∞–ª–∏–∑–∞—Ç–æ—Ä–µ –ø—Ä–æ—Ü–µ—Å—Å –∫–æ–º–º—É–Ω–∏–∫–∞—Ü–∏–∏ —Å –¥–∞—Ç—á–∏–∫–æ–º –≤—ã–≥–ª—è–¥–∏—Ç —Ç–∞–∫: –ö–∞–∫ –≤–∏–¥–Ω–æ –∏–∑ –≥—Ä–∞—Ñ–∏–∫–∞, –¥—Ä–∞–π–≤–µ—Ä I2C –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏ —Ñ–æ—Ä–º–∏—Ä—É–µ—Ç —Å–∏–≥–Ω–∞–ª –ø–µ—Ä–µ–∫–ª—é—á–µ–Ω–∏—è –¥–ª—è IC2 –Ω–∞ –≤—ã–≤–æ–¥–µ GPOI8 (–Ω–∏–∂–Ω—è—è –æ—Å—Ü–∏–ª–ª–æ–≥—Ä–∞–º–º–∞). –õ—É—á—à–µ-–±—ã –æ–Ω —ç—Ç–æ –¥–µ–ª–∞–ª –∫–æ–≥–¥–∞ —É—Ä–æ–≤–µ–Ω—å –Ω–∞ –≤—ã–≤–æ–¥–∞—Ö SDA/SCL —É—Å—Ç–∞–Ω–æ–≤–∏—Ç—Å—è –≤ –ª–æ–≥. 1. –ö—Ä–æ–º–µ —Ç–æ–≥–æ, –Ω–µ—Å–º–æ—Ç—Ä—è –Ω–∞ —É—Å—Ç–∞–Ω–æ–≤–∫—É —á–∞—Å—Ç–æ—Ç—ã —Ç–∞–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏—è –ª–∏–Ω–∏–∏ I2C –≤ 100 –∫–≥—Ü (i2 b s: 100), –æ–Ω–∞ —Ç–∞–∫—Ç–∏—Ä—É–µ—Ç—Å—è –Ω–∞ 384 –∫–≥—Ü. –ú–º–º–º–º–¥–∞... –•–æ—Ä–æ—à–æ, —á—Ç–æ –Ω–∞—à —Å–µ–Ω—Å–æ—Ä —Ä–∞–±–æ—Ç–∞–µ—Ç –Ω–∞ —á–∞—Å—Ç–æ—Ç–µ —Ç–∞–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏—è –¥–æ 400 –∫–≥—Ü. 2. –ù–∞—Å—Ç—Ä–æ–∏—Ç—å –¥–∞—Ç—á–∏–∫ –Ω–∞ —á—Ç–µ–Ω–∏–µ –∑–Ω–∞—á–µ–Ω–∏—è —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—ã –∏–∑ –µ–≥–æ —Ä–µ–≥–∏—Å—Ç—Ä–∞ –Ω–æ–º–µ—Ä 0 –ø–æ—Å—ã–ª–∫–æ–π –≤ –º–æ–¥—É–ª—å –∫–æ–º–∞–Ω–¥—ã i2cwr 72 hex 0 —Å –æ—á–µ–≤–∏–¥–Ω—ã–º —Å–∏–Ω—Ç–∞–∫—Å–∏—Å–æ–º. 3. –ü—Ä–æ–∏–∑–≤–µ—Å—Ç–∏ —á—Ç–µ–Ω–∏–µ –¥–≤—É—Ö –±–∞–π—Ç–æ–≤ –∑–Ω–∞—á–µ–Ω–∏—è —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—ã –ø–æ–¥–∞—á–µ–π –≤ –º–æ–¥—É–ª—å –∫–æ–º–∞–Ω–¥—ã i2crd 72 hex 2. –ù–∞ —Ç–µ—Ä–º–∏–Ω–∞–ª–µ –ø—Ä–∏ —ç—Ç–æ–º –ø–æ–∫–∞–∑—ã–≤–∞—é—Ç—Å—è –ø—Ä–æ—á–∏—Ç–∞–Ω–Ω—ã–µ –¥–∞–Ω–Ω—ã–µ, –∫–æ—Ç–æ—Ä—ã–µ, –∫–∞–∫ —Å–ª–µ–¥—É–µ—Ç –∏–∑ –æ—Å—Ü–∏–ª–ª–æ–≥—Ä–∞–º–º—ã –Ω–∏–∂–µ, —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—Ç —Ä–µ–∞–ª—å–Ω–æ—Å—Ç–∏. –ò–∑ –Ω–∏—Ö 12 – —à–µ—Å—Ç–Ω–∞–¥—Ü–∞—Ç–∏—Ä–∏—á–Ω–æ–µ –∑–Ω–∞—á–µ–Ω–∏–µ —Ü–µ–ª–æ–π —á–∞—Å—Ç–∏ —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—ã (0—Ö12 = 18°C), a 50 – –¥—Ä–æ–±–Ω–æ–π (0—Ö50 = 5/16). –ù–æ–ª—å –≤ –∫–æ–Ω—Ü–µ –¥—Ä–æ–±–Ω–æ–π —á–∞—Å—Ç–∏ –≤ –∑–Ω–∞—á–µ–Ω–∏–µ —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—ã –Ω–µ –≤—Ö–æ–¥–∏—Ç, —Ç.–∫. —Å–µ–Ω—Å–æ—Ä –∏–º–µ–µ—Ç —Ç–æ–ª—å–∫–æ 12-–±–∏—Ç–Ω–æ–µ —Ä–∞–∑—Ä–µ—à–µ–Ω–∏–µ.
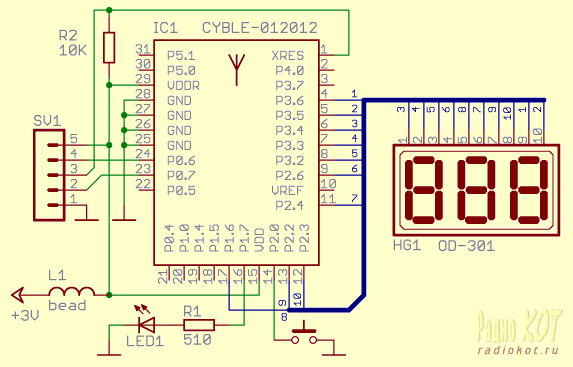
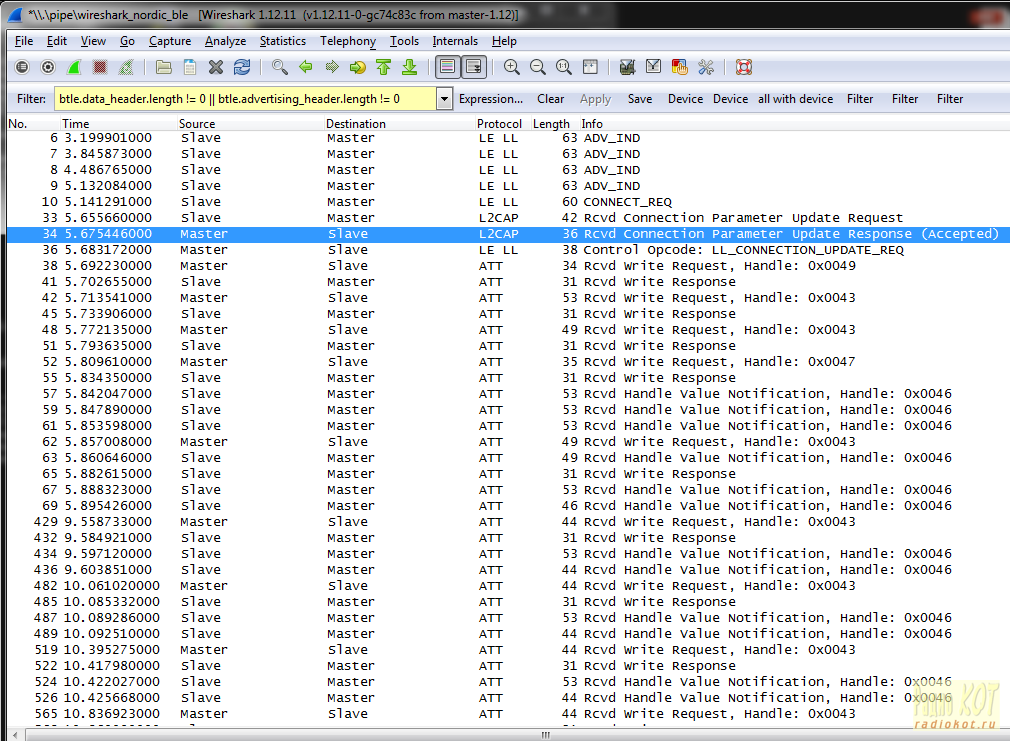
–Ý–∞–±–æ—Ç–∞ —Å –º–æ–¥—É–ª–µ–º —á–µ—Ä–µ–∑ Bluetooth –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å –ü—Ä–æ–¥–µ–ª–∞–µ–º —Ç–µ–ø–µ—Ä—å —Ç–æ–∂–µ —Å–∞–º–æ–µ –≤ —Ä–µ–∂–∏–º–µ –ø–æ–¥–∞—á–∏ –∫–æ–º–∞–Ω–¥ –º–æ–¥—É–ª—é —á–µ—Ä–µ–∑ –µ–≥–æ –±–µ–∑–ø—Ä–æ–≤–æ–¥–Ω—ã–π –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å. –î–ª—è –ø–µ—Ä–µ–¥–∞—á–∏ –∫–æ–º–º–∞–Ω–¥ —Å–Ω–∞—á–∞–ª–∞ –≤–æ—Å–ø–æ–ª—å–∑—É–µ–º—Å—è –¥–æ–Ω–≥–ª–æ–º CY5677 —Ñ–∏—Ä–º—ã Cypress –∏ –∏—Ö —Å–∏—Å—Ç–µ–º–æ–π CySmart. –£ —Ñ–∏—Ä–º—ã —Ç–∞–∫–∂–µ –∏–º–µ–µ—Ç—Å—è –≤–µ—Ä—Å–∏—è —ç—Ç–æ–π —Å–∏—Å—Ç–µ–º—ã –¥–ª—è —Å–º–∞—Ä—Ç—Ñ–æ–Ω–æ–≤, –ø–æ–¥–¥–µ—Ä–∂–∏–≤–∞—é—â–∏—Ö Bluetooth 4.1. –í —ç—Ç–æ–º —Å–ª—É—á–∞–µ –¥–æ–Ω–≥–ª –Ω–µ –Ω—É–∂–µ–Ω, –Ω–æ –Ω–∞ –∫–æ–º–ø—å—é—Ç–µ—Ä–µ –º–Ω–µ —É–¥–æ–±–Ω–µ–µ. –ü–æ—Å–ª–µ –∑–∞–ø—É—Å–∫–∞ —Å–∏—Å—Ç–µ–º—ã –∏ –æ–∫–æ–Ω—á–∞–Ω–∏—è —Å–∫–∞–Ω–∏—Ä–æ–≤–∞–Ω–∏—è Bluetooth —É—Å—Ç—Ä–æ–π—Å—Ç–≤, —É–≤–∏–¥–∏–º –Ω–∞—à –º–æ–¥—É–ª—å –≤ —Å–ø–∏—Å–∫–µ –ø–æ–¥ –∏–º–µ–Ω–µ–º AMS-693F. –ü–æ—Å–ª–µ–¥–Ω–∏–µ 4 —Å–∏–º–≤–æ–ª–∞ –≤ –¥–µ—Ñ–æ–ª—Ç–Ω–æ–º –∏–º–µ–Ω–∏ –º–æ–¥—É–ª—è (–∏–º—è –º–æ–∂–Ω–æ –∏–∑–º–µ–Ω–∏—Ç—å) —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—Ç –ø–æ—Å–ª–µ–¥–Ω–∏–º –¥–≤—É–º –±–∞–π—Ç–∞–º –µ–≥–æ –∏–Ω–¥–∏–≤–∏–¥—É–∞–ª—å–Ω–æ–≥–æ Bluetooth –∞–¥—Ä–µ—Å–∞ (–ø–æ–¥—á—ë—Ä–∫–Ω—É—Ç–æ –∫—Ä–∞—Å–Ω—ã–º). –î–µ—Ñ–æ–ª—Ç–Ω–æ–µ —Å–æ—Å—Ç–æ—è–Ω–∏–µ –º–æ–¥—É–ª—è –ø–æ—Å–ª–µ –≤–∫–ª—é—á–µ–Ω–∏—è —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É–µ—Ç —Ä–µ–∂–∏–º—É –ø–µ—Ä–µ–¥–∞—á–∏ –∏–∑–≤–µ—â–µ–Ω–∏–π (Advertising) –ø—Ä–∏ –≤—ã—Ö–æ–¥–Ω–æ–π –º–æ—â–Ω–æ—Å—Ç–∏ +4dBm. –ò–Ω—Ç–µ—Ä–µ—Å–Ω–æ —Å—Ä–∞–∑—É –æ—Ü–µ–Ω–∏—Ç—å —Ç–æ–∫–æ–ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ –º–æ–¥—É–ª—è –≤ —Ç–∞–∫–æ–º —Ä–µ–∂–∏–º–µ. –î–ª—è —ç—Ç–æ–≥–æ —è –≤—Ä–µ–º–µ–Ω–Ω–æ –æ—Ç–∫–ª—é—á–∏–ª –æ—Ç –º–æ–¥—É–ª—è –≤—Å—é –æ—Å—Ç–∞–ª—å–Ω—É—é —á–∞—Å—Ç—å —Å—Ö–µ–º—ã –∏ –∏–∑–º–µ—Ä–∏–ª —Ç–æ–∫–æ–ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ –∏–Ω—Å—Ç—Ä—É–º–µ–Ω—Ç–æ–º Atmel Power Debugger, —Ä–∞–±–æ—Ç–∞—é—â–µ–º –≤–∫—É–ø–µ —Å –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–µ–º Data Visualizer. –î–ª—è —É–º–µ–Ω—å—à–µ–Ω–∏—è —Ç–æ–∫–æ–ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏—è –≤ –ø–µ—Ä–µ—Ä—ã–≤–∞—Ö –º–µ–∂–¥—É –ø–æ—Å—ã–ª–∫–æ–π –∏–∑–≤–µ—â–µ–Ω–∏–π —è –ø—Ä–µ–¥–≤–∞—Ä–∏—Ç–µ–ª—å–Ω–æ —Å–∫–æ–Ω—Ñ–∏–≥—É—Ä–∏—Ä–æ–≤–∞–ª –º–æ–¥—É–ª—å –Ω–∞ —Ä–∞–±–æ—Ç—É –≤ —Ä–µ–∂–∏–º–µ low power advertising —É—Å—Ç–∞–Ω–æ–≤–∫–æ–π –∑–Ω–∞—á–µ–Ω–∏—è 10 –≤ –ø–µ—Ä–µ–º–µ–Ω–Ω—É—é sy a t. –ú–æ–¥—É–ª—å –ø–µ—Ä–µ–π–¥—ë—Ç –≤ —É–∫–∞–∑–∞–Ω–Ω—ã–π —Ä–µ–∂–∏–º —á–µ—Ä–µ–∑ 10 —Å–µ–∫—É–Ω–¥ –ø–æ—Å–ª–µ —Ä–µ—Å–µ—Ç–∞. –ö–∞–∫ —Å–ª–µ–¥—É–µ—Ç –∏–∑ –≥—Ä–∞—Ñ–∏–∫–∞ –Ω–∏–∂–µ, –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ–µ —Ç–æ–∫–æ–ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ –º–æ–¥—É–ª—è —Å–æ—Å—Ç–∞–≤–∏–ª–æ –æ–∫–æ–ª–æ 13–º–ê –ø—Ä–∏ –ø–æ—Å—ã–ª–∫–µ –∏–∑–≤–µ—â–µ–Ω–∏–π —Å –ø–µ—Ä–∏–æ–¥–æ–º –æ–∫–æ–ª–æ 0.6 —Å–µ–∫. –ü–æ–º–∏–º–æ –æ—Å–Ω–æ–≤–Ω—ã—Ö –ø–∏–∫–æ–≤ –Ω–∞ –æ—Å—Ü–∏–ª–ª–æ–≥—Ä–∞–º–º–µ —Ç–∞–∫–∂–µ –≤–∏–¥–Ω—ã –≤—Ç–æ—Ä–∏—á–Ω—ã–µ –ø–∏–∫–∏ —Ç–æ–∫–æ–ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏—è, —Å–ª–µ–¥—É—é—â–∏–µ —Å –ø–µ—Ä–∏–æ–¥–æ–º 1 —Å–µ–∫. –î—É–º–∞—é, —ç—Ç–æ —Å–≤—è–∑–∞–Ω–æ —Å –æ–±—Ä–∞–±–æ—Ç–∫–æ–π –Ω–µ–∫–∏—Ö —Å–æ–±—ã—Ç–∏–π –û–° –ø–æ —Ç–∞–π–º–µ—Ä—É. –Ý–∞—Å—Ç—è–Ω—É–≤ –æ—Å–Ω–æ–≤–Ω–æ–π –ø–∏–∫ –ø–æ –æ—Å–∏ –•, –æ—Ç—á—ë—Ç–ª–∏–≤–æ —É–≤–∏–¥–∏–º 3 —Å–∫–∞—á–∫–∞ —Ç–æ–∫–æ–ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏—è –ø—Ä–∏ –æ—Ç—Å—ã–ª–∫–µ –∏–∑–≤–µ—â–µ–Ω–∏–π (advertisements) –Ω–∞ 3-—Ö –∫–∞–Ω–∞–ª–∞—Ö –≤ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–∏–∏ —Å –ø—Ä–æ—Ç–æ–∫–æ–ª–æ–º. –û—Ç—Å—ã–ª–∫–∞ –∏—Ö –∑–∞–Ω–∏–º–∞–µ—Ç –æ–∫–æ–ª–æ 4 –º—Å –∏ –µ—â—ë –ø—Ä–∏–º–µ—Ä–Ω–æ 3 –º—Å –º–æ–¥—É–ª—é —Ç—Ä–µ–±—É–µ—Ç—Å—è –Ω–∞ —Ä–∞–∑–≥–æ–Ω —Å–≤–æ–∏—Ö —Ç–∞–∫—Ç–æ–≤—ã—Ö –≥–µ–Ω–µ—Ä–∞—Ç–æ—Ä–æ–≤ –∏ –ø–æ–¥–≥–æ—Ç–æ–≤–∫—É –ø—Ä–æ–±—É–∂–¥–µ–Ω–∏—è –∏–∑ —Å–Ω–∞. –í –ø–µ—Ä–∏–æ–¥ –ø—Ä–æ–±—É–∂–¥–µ–Ω–∏—è –µ–≥–æ —Å—Ä–µ–¥–Ω–µ–µ —Ç–æ–∫–æ–ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ –æ–∫–∞–∑–∞–ª–æ—Å—å –æ–∫–æ–ª–æ 240 –º–∫–ê. –ú–æ–¥—É–ª—å –≤—ã–¥–µ—Ä–∂–∏–≤–∞–µ—Ç –∑–∞—è–≤–ª–µ–Ω–Ω—ã–µ –≤ –î–® –ø–∞—Ä–∞–º–µ—Ç—Ä—ã –ø–æ –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ–º—É —Ç–æ–∫–æ–ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏—é. –≠—Ç–æ, –≤ –æ–±—â–µ–º, –æ—Ç–Ω–æ—Å–∏—Ç—Å—è –∏ –∫ –ø–∞—É–∑–∞–º –º–µ–∂–¥—É –ø–æ—Å—ã–ª–∫–æ–π –∏–∑–≤–µ—â–µ–Ω–∏–π, –∫–∞–∫ –≤–∏–¥–Ω–æ –∏–∑ —Å–ª–µ–¥—É—é—â–µ–≥–æ –≥—Ä–∞—Ñ–∏–∫–∞. –°–ª–µ–¥—É–µ—Ç –æ—Ç–º–µ—Ç–∏—Ç—å, –æ–¥–Ω–∞–∫–æ, —á—Ç–æ –¥–∞–Ω–Ω—ã–π –º–æ–¥—É–ª—å –Ω–µ —è–≤–ª—è–µ—Ç—Å—è —Ä–µ–∫–æ—Ä–¥–Ω—ã–º –ø–æ —ç–∫–æ–Ω–æ–º–∏—á–Ω–æ—Å—Ç–∏ —Å—Ä–µ–¥–∏ Bluetooth –º–æ–¥—É–ª–µ–π —Ä–∞–∑–Ω—ã—Ö –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç–µ–ª–µ–π. –ù–æ –≤–µ—Ä–Ω—ë–º—Å—è –∫ —Ü–µ–ª–∏ –Ω–∞—à–µ–≥–æ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è –∏ —Å–∏—Å—Ç–µ–º–µ CySmart. –í—ã–±–∏—Ä–∞–µ–º –º–æ–¥—É–ª—å –≤ —Å–ø–∏—Å–∫–µ –æ–±–Ω–∞—Ä—É–∂–µ–Ω–Ω—ã—Ö Bluetooth —É—Å—Ç—Ä–æ–π—Å—Ç–≤ –∏ —É—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞–µ–º —Å–æ–µ–¥–∏–Ω–µ–Ω–∏–µ —Å –Ω–∏–º. –ú–æ–¥—É–ª—å —Å—Ä–∞–∑—É –∑–∞–ø—Ä–∞—à–∏–≤–∞–µ—Ç –∏–∑–º–µ–Ω–µ–Ω–∏–µ –ø–µ—Ä–∏–æ–¥–∞ —Å–æ–µ–¥–∏–Ω–µ–Ω–∏–π —Å –¥–æ–Ω–≥–ª–æ–º –≤ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–∏–∏ —Å –µ–≥–æ –Ω–∞—Å—Ç—Ä–æ–π–∫–∞–º–∏. –ï—Å–ª–∏ —Å–æ–≥–ª–∞—Å–∏–º—Å—è, CySmart –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏ –ø–µ—Ä–µ—Å—Ç—Ä–æ–∏—Ç –¥–æ–Ω–≥–ª –Ω–∞ —Ç–∞–∫–æ–π –ø–µ—Ä–∏–æ–¥. –ï—Å–ª–∏ –æ—Ç–∫–∞–∂–µ–º—Å—è, —Ç–æ –º–æ–¥—É–ª—å —É—Å—Ç–∞–Ω–æ–≤–∏—Ç —Å–≤–æ–π –ø–µ—Ä–∏–æ–¥ –≤ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–∏–∏ —Å —Ç–∞–∫–æ–≤—ã–º —É –¥–æ–Ω–≥–ª–∞. –í —Å–ª–µ–¥—É—é—â–µ–º –æ–∫–Ω–µ —Å–∏—Å—Ç–µ–º—ã –Ω–∞–∂–∏–º–∞–µ–º –Ω–∞ Discover all attributes –∏ –ø–æ–ª—É—á–∞–µ–º —Å–ø–∏—Å–æ–∫ —Å–µ—Ä–≤–∏—Å–æ–≤, –ø—Ä–µ–¥–ª–∞–≥–∞–µ–º—ã—Ö –º–æ–¥—É–ª–µ–º. –ò–∑ –Ω–∏—Ö –Ω–∞—Å –∏–Ω—Ç–µ—Ä–µ—Å—É–µ—Ç —Ç–æ–ª—å–∫–æ —Å–µ—Ä–≤–∏—Å –ø–æ–∫–∞–∑–∞–Ω–Ω—ã–π –Ω–∏–∂–µ. –ï–≥–æ –¥–µ—Ñ–æ–ª—Ç–Ω–æ–µ UUID –æ–≥–æ–≤–æ—Ä–µ–Ω–æ –≤ –î–® –∏ –º–æ–∂–µ—Ç –±—ã—Ç—å –∏–∑–º–µ–Ω–µ–Ω–æ –ø—Ä–∏ –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ—Å—Ç–∏. –í —Å–µ—Ä–≤–∏—Å –≤–∫–ª—é—á–µ–Ω—ã 3 —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫–∏, —Ä–∞—Å–ø–æ–ª–æ–∂–µ–Ω–Ω—ã–µ –ø–æ –∞–¥—Ä–µ—Å–∞–º 0—Ö0042, 0—Ö0045, 0—Ö0048. –ü—Ä–æ–∏–∑–≤–æ–¥–∏–º —á—Ç–µ–Ω–∏–µ –∏—Ö –∑–Ω–∞—á–µ–Ω–∏–π, –∫–ª–∏–∫–Ω—É–≤ –º—ã—à–∫–æ–π –Ω–∞ Read All Characteristics. –°–æ–≥–ª–∞—Å–Ω–æ –¥–æ–∫—É–º–µ–Ω—Ç–∞—Ü–∏–∏ [4], –ø–µ—Ä–≤–∞—è —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫–∞ —Å–ª—É–∂–∏—Ç –¥–ª—è –ø–µ—Ä–µ–¥–∞—á–∏ –¥–∞–Ω–Ω—ã—Ö/–∫–æ–º–∞–Ω–¥ –º–æ–¥—É–ª—é. –í—Ç–æ—Ä–∞—è – –¥–ª—è –ø—Ä–∏—ë–º–∞ –¥–∞–Ω–Ω—ã—Ö –∏–∑ –º–æ–¥—É–ª—è. –ò —Ç—Ä–µ—Ç—å—è – –¥–ª—è –∏–∑–º–µ–Ω–µ–Ω–∏—è —Ä–µ–∂–∏–º–∞ —Ä–∞–±–æ—Ç—ã –º–æ–¥—É–ª—è. –ù–∞–ø–æ–º–Ω—é, —á—Ç–æ –∏–º–µ–µ—Ç—Å—è –≤—Å–µ–≥–æ 3 —Ä–µ–∂–∏–º–∞ (local, stream, remote) –∏ –º—ã —Å–æ–±–∏—Ä–∞–µ–º—Å—è —Ä–∞–±–æ—Ç–∞—Ç—å —Å –ø–æ—Å–ª–µ–¥–Ω–∏–º. –û–¥–Ω–∞–∫–æ, –¥–µ—Ñ–æ–ª—Ç–Ω—ã–π —Ä–µ–∂–∏–º —Ä–∞–±–æ—Ç—ã –ø–æ—Å–ª–µ —É—Å—Ç–∞–Ω–æ–≤–∫–∏ —Å–æ–µ–¥–∏–Ω–µ–Ω–∏—è —Å –º–æ–¥—É–ª–µ–º – —ç—Ç–æ —Ä–µ–∂–∏–º –ø–æ—Ç–æ–∫–æ–≤–æ–π –ø–µ—Ä–µ–¥–∞—á–∏ –¥–∞–Ω–Ω—ã—Ö (stream mode – –ø–æ–¥—á—ë—Ä–∫–Ω—É—Ç–æ –∫—Ä–∞—Å–Ω—ã–º; –¥–µ—Ñ–æ–ª—Ç–Ω–æ–µ –∑–Ω–∞—á–∏–µ –º–æ–∂–Ω–æ –∏–∑–º–µ–Ω–∏—Ç—å). –î–ª—è –ø–µ—Ä–µ–¥–∞—á–∏ –∫–æ–º–∞–Ω–¥ –º–æ–¥—É–ª—é —á–µ—Ä–µ–∑ Bluetooth —Å–ª–µ–¥—É–µ—Ç –ø–µ—Ä–µ–π—Ç–∏ –≤ —Ä–µ–∂–∏–º remote, –∑–∞–ø–∏—Å–∞–≤ –≤ —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫—É –ø–æ –∞–¥—Ä–µ—Å—É 0—Ö0049 –∑–Ω–∞—á–µ–Ω–∏–µ 03. –í –æ–∫–Ω–µ —Ç–µ—Ä–º–∏–Ω–∞–ª–∞ –ø—Ä–∏ —ç—Ç–æ–º –º–æ–¥—É–ª—å —Å–∏–≥–Ω–∞–ª–∏–∑–∏—Ä—É–µ—Ç –ø–µ—Ä–µ—Ö–æ–¥ –∏–∑ —Ä–µ–∂–∏–º–∞ STREAM_MODE –≤ REMOTE_MODE. –¢–µ–ø–µ—Ä—å –≤—Å—ë –≥–æ—Ç–æ–≤–æ –¥–ª—è –ø–æ–¥–∞—á–∏ –≤ –º–æ–¥—É–ª—å –∫–æ–º–∞–Ω–¥. –ö–∞–∂–¥–∞—è –∫–æ–º–∞–Ω–¥–∞ –¥–æ–ª–∂–Ω–∞ —Å–æ—Å—Ç–æ—è—Ç—å –Ω–µ –±–æ–ª–µ–µ —á–µ–º –∏–∑ 20 –±–∞–π—Ç–æ–≤ (–¥–ª—è –±–æ–ª–µ–µ –¥–ª–∏–Ω–Ω—ã—Ö –∫–æ–º–∞–Ω–¥ –∏—Ö —Å–ª–µ–¥—É–µ—Ç –ø–µ—Ä–µ–¥–∞–≤–∞—Ç—å –≤ –Ω–µ—Å–∫–æ–ª—å–∫–æ —ç—Ç–∞–ø–æ–≤) –∏ –∑–∞–∫–∞–Ω—á–∏–≤–∞—Ç—å—Å—è —Å–∏–º–≤–æ–ª–∞–º–∏ –∫–æ–Ω—Ü–∞ —Å—Ç—Ä–æ–∫–∏ “rn” (ASCII –∫–æ–¥—ã 0—Ö0D –∏ 0—Ö0A). –≠—Ç–æ –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ –∏–Ω—Ç–µ—Ä–ø—Ä–µ—Ç–∞—Ç–æ—Ä—É –∫–æ–º–∞–Ω–¥ ZentriOS-S –¥–ª—è –æ–ø—Ä–µ–¥–µ–ª–µ–Ω–∏—è –∫–æ–Ω—Ü–∞ –∫–æ–º–∞–Ω–¥—ã. –î–ª—è –∑–∞–∂–∏–≥–∞–Ω–∏—è —Å–≤–µ—Ç–æ–¥–∏–æ–¥–∞ –∑–∞–ø–∏—Å—ã–≤–∞–µ–º –≤ —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫—É –ø–æ –∞–¥—Ä–µ—Å—É 0—Ö0043 —Å—Ç—Ä–æ–∫—É “gdi 9 ohirn” (–≤ –±–∞–π—Ç–∞—Ö —ç—Ç–æ 67:64:69:20:39:20:6F:68:69:0D:0A), –∫–∞–∫ –∏ –≤—ã—à–µ, –∞ –¥–ª—è –≥–∞—à–µ–Ω–∏—è - “gdi 9 olorn” (67:64:69:20:39:20:6F:6C:6F:0D:0A). –î–ª—è –¥–∏—Å—Ç–∞–Ω—Ü–∏–æ–Ω–Ω–æ–≥–æ —á—Ç–µ–Ω–∏—è —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—ã, –≤ –º–æ–¥—É–ª—å —Å–ª–µ–¥—É–µ—Ç –ø–æ–¥–∞—Ç—å —Ç–µ–∂–µ —Å–∞–º—ã–µ –∫–æ–º–∞–Ω–¥—ã, —á—Ç–æ –∏ –≤ —Å–ª—É—á–∞–µ –ø—Ä–æ–≤–æ–¥–Ω–æ–≥–æ –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å–∞ –≤—ã—à–µ, —è–≤–Ω–æ –¥–æ–ø–æ–ª–Ω–∏–≤ –∫–∞–∂–¥—É—é –∏–∑ –Ω–∏—Ö —Å–∏–º–≤–æ–ª–∞–º–∏ “rn”. –ö–æ–º–∞–Ω–¥—ã —Ç–∞–∫–∂–µ —Å–ª–µ–¥—É–µ—Ç –∑–∞–ø–∏—Å—ã–≤–∞—Ç—å –≤ —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫—É –ø–æ –∞–¥—Ä–µ—Å—É 0—Ö0043. –û–¥–Ω–∞–∫–æ, –∏–º–µ–µ—Ç—Å—è –∏ –Ω–µ–±–æ–ª—å—à–æ–µ –æ—Ç–ª–∏—á–∏–µ. –í–æ-–ø–µ—Ä–≤—ã—Ö, –≤ CySmart —Å–ª–µ–¥—É–µ—Ç —Ä–∞–∑—Ä–µ—à–∏—Ç—å –ø—Ä–∏—ë–º –≤—Å–µ—Ö –Ω–æ—Ç–∏—Ñ–∏–∫–∞—Ü–∏–π –º–æ–¥—É–ª—è. –≠—Ç–æ –¥–æ—Å—Ç–∏–≥–∞–µ—Ç—Å—è –∫–ª–∏–∫–∞–Ω–∏–µ–º –º—ã—à–∫–æ–π –Ω–∞ Enable All Notifications, –∏–ª–∏ –ø—Ä–æ—Å—Ç–æ –∑–∞–ø–∏—Å—å—é –∑–Ω–∞—á–µ–Ω–∏—è 03:00 –≤ CCCD –¥–µ—Å–∫—Ä–∏–ø—Ç–æ—Ä –ø–æ –∞–¥—Ä–µ—Å—É 0—Ö0047. –ò –≤–æ-–≤—Ç–æ—Ä—ã—Ö, —Å–ª–µ–¥—É–µ—Ç —Ä–∞–∑—Ä–µ—à–∏—Ç—å –º–æ–¥—É–ª—é –ø–µ—Ä–µ–¥–∞—á—É —Ö–µ–¥–µ—Ä–æ–≤, –ø—Ä–µ–¥—à–µ—Å—Ç–≤—É—é—â–∏—Ö –¥–∞–Ω–Ω—ã–º, –∑–∞—Å—ã–ª–∫–æ–π –≤ –Ω–µ–≥–æ –∫–æ–º–∞–Ω–¥—ã —É—Å—Ç–∞–Ω–æ–≤–∫–∏ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—â–µ–π –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π “set sy c h” (73:65:74:20:73:79:20:63:20:68:20:31:0D:0A). –ï—ë, –∫–∞–∫ –∏ –≤—Å—è–∫—É—é –∏–Ω—É—é –ø–µ—Ä–µ–º–µ–Ω–Ω—É—é –º–æ–∂–Ω–æ —Å–æ—Ö—Ä–∞–Ω–∏—Ç—å –≤ –º–æ–¥—É–ª–µ –∏ –Ω–µ –ø–µ—Ä–µ–¥–∞–≤–∞—Ç—å –≤–ø–æ—Å–ª–µ–¥—Å—Ç–≤–∏–∏. –ë–µ–∑ –≤—Å–µ–≥–æ —ç—Ç–æ–≥–æ –ø—Ä–æ—á–∏—Ç–∞—Ç—å –∑–Ω–∞—á–µ–Ω–∏–µ —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—ã –Ω–µ —É–¥–∞—Å—Ç—Å—è. –ü–æ –ø–æ–¥–∞—á–µ –∫–æ–º–∞–Ω–¥—ã —á—Ç–µ–Ω–∏—è —Ä–µ–≥–∏—Å—Ç—Ä–∞ —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—ã —Å–µ–Ω—Å–æ—Ä–∞ “i2crd 72 hex 2rn” (69:32:63:72:64:20:37:32:20:68:65:78:20:32:0D:0A), –ø—Ä–æ—á–∏—Ç–∞–Ω–Ω–æ–µ –∏–∑ –¥–∞—Ç—á–∏–∫–∞ –∑–Ω–∞—á–µ–Ω–∏–µ –ø–µ—Ä–µ–¥–∞—Å—Ç—Å—è –¥–æ–Ω–≥–ª—É –∫–∞–∫ –Ω–æ—Ç–∏—Ñ–∏–∫–∞—Ü–∏—è (–¥–ª—è —ç—Ç–æ–≥–æ –º—ã –∏—Ö –∏ —Ä–∞–∑—Ä–µ—à–∞–ª–∏) –∏ –±—É–¥–µ—Ç –¥–æ—Å—Ç—É–ø–Ω–æ —á–µ—Ä–µ–∑ —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫—É –ø–æ –∞–¥—Ä–µ—Å—É 0—Ö0046 (–ø–æ–¥—á—ë—Ä–∫–Ω—É—Ç–æ –∫—Ä–∞—Å–Ω—ã–º). –í —Ä–µ–∑—É–ª—å—Ç–∞—Ç–µ —á—Ç–µ–Ω–∏—è –ø–æ–ª—É—á–∏–º —Å–ª–µ–¥—É—é—â—É—é –∫–∞—Ä—Ç–∏–Ω—É: –ö–∞–∫ –≤–∏–¥–Ω–æ, –ø—Ä–∏–Ω—è—Ç—ã–µ –¥–∞–Ω–Ω—ã–µ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—Ç —Ç—Ä—ë–º —Ç–µ–∫—Å—Ç–æ–≤—ã–º —Å—Ç—Ä–æ–∫–∞–º, —Ä–∞–∑–¥–µ–ª—ë–Ω–Ω—ã—Ö —Å–∏–º–≤–æ–ª–∞–º–∏ “rn” (0D:0A). –ü–µ—Ä–≤–∞—è —Å—Ç—Ä–æ–∫–∞ (–±–∞–π—Ç—ã 30:30:36 –≤ —à–µ—Å—Ç–Ω–∞–¥—Ü–∞—Ç–∏—Ä–∏—á–Ω–æ–π —Å–∏—Å—Ç–µ–º–µ) - —ç—Ç–æ ASCII –∫–æ–¥—ã —Å—Ç—Ä–æ–∫–∏ “006”. –í —ç—Ç–æ–º —Ö–µ–¥–µ—Ä–µ –ø–æ–∫–∞–∑—ã–≤–∞–µ—Ç—Å—è —Å–∫–æ–ª—å–∫–æ –∏–Ω—Ñ–æ—Ä–º–∞—Ü–∏–æ–Ω–Ω—ã—Ö –±–∞–π—Ç–æ–≤ –¥–∞–Ω–Ω—ã—Ö –ø—Ä–∏–Ω—è—Ç–æ –≤–æ –≤—Ç–æ—Ä–æ–π —Å—Ç—Ä–æ–∫–µ, –≤–∫–ª—é—á–∞—è —Å–∏–º–≤–æ–ª—ã “rn” –≤ –µ—ë –∫–æ–Ω—Ü–µ. –í –Ω–∞—à–µ–º —Å–ª—É—á–∞–µ –∏–Ω—Ñ–æ—Ä–º–∞—Ü–∏–æ–Ω–Ω—ã–µ –±–∞–π—Ç—ã (31:32:41:30), —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—Ç ASCII –∫–æ–¥–∞–º —Å—Ç—Ä–æ–∫–∏ “12A0”, –ø—Ä–∏–º–µ—Ä–Ω–æ —Ç–æ–π-–∂–µ, —á—Ç–æ –º—ã –≤–∏–¥–µ–ª–∏ –≤ –æ–∫–Ω–µ —Ç–µ—Ä–º–∏–Ω–∞–ª–∞ –≤—ã—à–µ. –ü—Ä–∏–Ω—è—Ç–∞—è —Å—Ç—Ä–æ–∫–∞ –≤ —Å–≤–æ—é –æ—á–µ—Ä–µ–¥—å –ø–æ–¥—Ä–∞–∑–¥–µ–ª—è–µ—Ç—Å—è –Ω–∞ —Ü–µ–ª—É—é —á–∞—Å—Ç—å —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—ã (0x12 = 18°C) –∏ –µ—ë –¥—Ä–æ–±–Ω—É—é —á–∞—Å—Ç—å (0xA0 = 10/16). –ù–∞ —Ç—Ä–µ—Ç—å—é –ø—Ä–∏–Ω—è—Ç—É—é —Å—Ç—Ä–æ–∫—É (3E:20) –º–æ–∂–Ω–æ –Ω–µ –æ–±—Ä–∞—â–∞—Ç—å –≤–Ω–∏–º–∞–Ω–∏–µ. –û–Ω–∞ —Å–æ—Å—Ç–æ–∏—Ç –∏–∑ —Å–∏–º–≤–æ–ª–æ–≤ –≥–æ—Ç–æ–≤–Ω–æ—Å—Ç–∏ –∏–Ω—Ç–µ—Ä–ø—Ä–µ—Ç–∞—Ç–æ—Ä–∞ –∫–æ–º–∞–Ω–¥, –æ—Ç–æ–±—Ä–∞–∂–∞–µ–º—ã—Ö –≤ –æ–∫–Ω–µ —Ç–µ—Ä–º–∏–Ω–∞–ª–∞ –∫–∞–∫ “> ” (—Å –ø—Ä–æ–±–µ–ª–æ–º –Ω–∞ –∫–æ–Ω—Ü–µ). –û—Ç–º–µ—á—É, —á—Ç–æ –º–æ–¥—É–ª—å –ø–µ—Ä–µ–¥–∞—ë—Ç —Å—Ç–∞—Ç—É—Å –≤—ã–ø–æ–ª–Ω–µ–Ω–∏—è –≤—Å–µ—Ö –∫–æ–º–∞–Ω–¥ –∫–∞–∫ –Ω–æ—Ç–∏—Ñ–∏–∫–∞—Ü–∏–∏, –¥–µ–∫–æ–¥–∏—Ä–æ–≤–∞–≤ –∫–æ—Ç–æ—Ä—ã–µ –≤ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–∏–∏ —Å —Ñ–æ—Ä–º–∞—Ç–æ–º [4], –º–æ–∂–Ω–æ —Å—É–¥–∏—Ç—å –æ–± —É—Å–ø–µ—Ö–µ –≤—ã–ø–æ–ª–Ω–µ–Ω–∏—è –ø–æ–¥–∞–Ω–Ω—ã—Ö –∫–æ–º–∞–Ω–¥. –î–ª—è —Ä–∞–±–æ—Ç—ã —Å –º–æ–¥—É–ª–µ–º –±–µ–∑ —Å–∏—Å—Ç–µ–º—ã CySmart –∏ –¥–æ–Ω–≥–ª–∞ –±—ã–ª–∞ —Å–æ–±—Ä–∞–Ω–∞ —Å–ª–µ–¥—É—é—â–∞—è —Ç–µ—Å—Ç–æ–≤–∞—è —Å—Ö–µ–º–∞ –Ω–∞ –æ—Å–Ω–æ–≤–µ Bluetooth 4.1 –º–æ–¥—É–ª—è IC1 —Ñ–∏—Ä–º—ã Cypress: –ü–æ—Å–ª–µ –ø–æ–¥–∞—á–∏ –ø–∏—Ç–∞–Ω–∏—è –Ω–∞ —Å—Ö–µ–º—É –ø—Ä–æ–≥—Ä–∞–º–º–∞ –∑–∞–≥—Ä—É–∂–µ–Ω–Ω–∞—è –≤ IC1 –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç —É—Å—Ç–∞–Ω–æ–≤–∫—É —Å–æ–µ–¥–∏–Ω–µ–Ω–∏—è —Å –º–æ–¥—É–ª–µ–º AMS001, –ø–µ—Ä–µ–≤–æ–¥ –µ–≥–æ –≤ —Ä–µ–∂–∏–º remote, –∏ —Ä–∞–∑—Ä–µ—à–µ–Ω–∏–µ –Ω–∞ –ø–æ—Å—ã–ª–∫—É –∏–º –Ω–æ—Ç–∏—Ñ–∏–∫–∞—Ü–∏–π –∫–∞–∫ —É–∫–∞–∑–∞–Ω–æ –≤—ã—à–µ. –ü—Ä–∏ —ç—Ç–æ–º —Å–≤–µ—Ç–æ–¥–∏–æ–¥ –Ω–∞ —Å—Ö–µ–º–µ —Å–Ω–∞—á–∞–ª–∞ –º–∏–≥–∞–µ—Ç —Å –ø–µ—Ä–∏–æ–¥–æ–º 0.5 —Å–µ–∫ –≤–æ –≤—Ä–µ–º—è —Å–∫–∞–Ω–∏—Ä–æ–≤–∞–Ω–∏—è Bluetooth —É—Å—Ç—Ä–æ–π—Å—Ç–≤ –º–æ–¥—É–ª–µ–º, –∏ –ø–æ –∑–∞–≤–µ—Ä—à–µ–Ω–∏–∏ —Å–æ–µ–¥–∏–Ω–µ–Ω–∏—è –≥–æ—Ä–∏—Ç –ø–æ—Å—Ç–æ—è–Ω–Ω–æ. –î–ª—è —É–ø—Ä–æ—â–µ–Ω–∏—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏ —Å–æ–µ–¥–∏–Ω–µ–Ω–∏—è –≤ –ø—Ä–æ–≥—Ä–∞–º–º—É –∑–∞–Ω–µ—Å—ë–Ω Bluetooth –∞–¥—Ä–µ—Å –º–æ–¥—É–ª—è AMS001. –î–∞–ª–µ–µ –æ–∂–∏–¥–∞–µ—Ç—Å—è –Ω–∞–∂–∞—Ç–∏e –Ω–∞ –∫–Ω–æ–ø–∫—É, –ø–æ —Å–æ–≤–µ—Ä—à–µ–Ω–∏–∏ –∫–æ—Ç–æ—Ä–æ–≥–æ –≤ –º–æ–¥—É–ª—å AMS001 –∑–∞—Å—ã–ª–∞–µ—Ç—Å—è –∑–∞–ø—Ä–æ—Å –Ω–∞ –∏–∑–º–µ—Ä–µ–Ω–∏–µ —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—ã –¥–∞—Ç—á–∏–∫–æ–º TMP112 —Å –ø–æ—Å–ª–µ–¥—É—é—â–µ–π –ø–µ—Ä–µ–¥–∞—á–µ–π –µ—ë –Ω–∞ IC1. –ü—Ä–∏–Ω—è—Ç–∞—è —Å—Ö–µ–º–æ–π —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä–∞ –ø–æ–∫–∞–∑—ã–≤–∞–µ—Ç—Å—è –Ω–∞ –ñ–ö–ò. –ü–æ—Å–ª–µ–¥—É—é—â–∏–µ –Ω–∞–∂–∞—Ç–∏—è –Ω–∞ –∫–Ω–æ–ø–∫—É –ø—Ä–∏–≤–æ–¥—è—Ç –∫ –≤–∫–ª—é—á–µ–Ω–∏—é –∏ –≤—ã–∫–ª—é—á–µ–Ω–∏—é —Å–≤–µ—Ç–æ–¥–∏–æ–¥–∞ –Ω–∞ —Å—Ö–µ–º–µ AMS001. –ñ–ö–ò —Ä–∞–±–æ—Ç–∞–µ—Ç –≤ —Ä–µ–∂–∏–º–µ –º—É–ª—å—Ç–∏–ø–ª–µ–∫—Å–∞ 1:3, –º–æ–¥—É–ª–∏ —Å–µ–º–µ–π—Å—Ç–≤–∞ CYBLE –æ—Å–Ω–∞—â–µ–Ω—ã –∞–ø–ø–∞—Ä–∞—Ç–Ω—ã–º –ñ–ö–ò –¥—Ä–∞–π–≤–µ—Ä–æ–º. –ü—Ä–æ–≥—Ä–∞–º–º–∞ —Ä–∞–∑—Ä–∞–±–æ—Ç–∞–Ω–∞ –≤ —Å–∏—Å—Ç–µ–º–µ PSoC Creator, –∏—Å—Ö–æ–¥–Ω—ã–π —Ç–µ–∫—Å—Ç –ø—Ä–æ–≥—Ä–∞–º–º—ã –ø—Ä–∏–ª–∞–≥–∞–µ—Ç—Å—è. –î–ª—è –ø—Ä–æ–≥—Ä–∞–º–º–∏—Ä–æ–≤–∞–Ω–∏—è –∏ –æ—Ç–ª–∞–¥–∫–∏ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–ª—Å—è —à—Ç–∞—Ç–Ω—ã–π –ø—Ä–æ–≥—Ä–∞–º–º–∞—Ç–æ—Ä MiniProg3. –ü–æ–¥—Ä–æ–±–Ω–µ–µ –æ —Ä–∞–±–æ—Ç–µ —Å Bluetooth –º–æ–¥—É–ª—è–º–∏ —Ñ–∏—Ä–º—ã Cypress –º–æ–∂–Ω–æ –ø—Ä–æ—á–∏—Ç–∞—Ç—å –≤ –º–æ–∏—Ö —Å—Ç–∞—Ç—å—è—Ö [8, 9]. –û–±–µ —Å—Ö–µ–º—ã —Å–æ–±—Ä–∞–Ω—ã –Ω–∞ –±–µ—Å–ø–∞—è—á–Ω—ã—Ö –º–æ–Ω—Ç–∞–∂–∫–∞—Ö. –Ý–∞–±–æ—Ç—É –º–æ–¥—É–ª–µ–π –º–æ–∂–Ω–æ –ø—Ä–æ—Å–ª–µ–¥–∏—Ç—å —Å –ø–æ–º–æ—â—å—é –¥–æ–Ω–≥–ª–∞ NFR51-DONGLE —Ñ–∏—Ä–º—ã Nordic Semiconductor —Å –∑–∞–≥—Ä—É–∂–µ–Ω–Ω—ã–º –≤ –Ω–µ–≥–æ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–µ–º —Å–Ω–∏—Ñ—Ñ–µ—Ä–∞ –ø—Ä–æ—Ç–æ–∫–æ–ª–∞ Bluetooth LE. –î–ª—è —ç—Ç–æ–≥–æ —Ç–∞–∫–∂–µ –ø–æ–Ω–∞–¥–æ–±—è—Ç—Å—è –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–µ ble-sniffer —Ñ–∏—Ä–º—ã –∏ —Å–∏—Å—Ç–µ–º–∞ Wireshark —Å —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—â–∏–º –ø–ª–∞–≥–∏–Ω–æ–º –¥–ª—è Bluetooth. –û –≤—Å—ë–º —ç—Ç–æ–º —Å–º. –ø–æ–¥—Ä–æ–±–Ω–µ–µ –≤ [9]. –ö–∞–∫ —Å–ª–µ–¥—É–µ—Ç –∏–∑ –Ω–∏–∂–µ–ø—Ä–∏–≤–µ–¥—ë–Ω–Ω–æ–≥–æ –ª–æ–≥–∞, –º–æ–¥—É–ª—å AMS001 (Slave) –Ω–∞—Ö–æ–¥–∏–ª—Å—è –≤ —Ä–µ–∂–∏–º–µ –ø–µ—Ä–µ–¥–∞—á–∏ –∏–∑–≤–µ—â–µ–Ω–∏–π (—Å—Ç—Ä–æ–∫–∏ —Å –Ω–æ–º–µ—Ä–∞–º–∏ 6 – 9) –¥–æ —Å–æ–µ–¥–∏–Ω–µ–Ω–∏—è —Å –º–æ–¥—É–ª–µ–º CYBLE (—Å—Ç—Ä–æ–∫–∞ 10). –î–∞–ª–µ–µ –ø—Ä–æ–∏–∑–æ—à–ª–æ —Å–æ–≥–ª–∞—Å–æ–≤–∞–Ω–∏–µ –ø–µ—Ä–∏–æ–¥–∞ —Å–æ–µ–¥–∏–Ω–µ–Ω–∏–π –º–µ–∂–¥—É –º–æ–¥—É–ª—è–º–∏ (—Å—Ç—Ä–æ–∫–∏ 33 – 36), –ø–µ—Ä–µ–≤–æ–¥ –º–æ–¥—É–ª—è AMS001 –≤ —Ä–µ–∂–∏–º remote (—Å—Ç—Ä–æ–∫–∏ 38 – 41), –∑–∞—Å—ã–ª–∫–∞ –∑–∞–ø—Ä–æ—Å–∞ –Ω–∞ –∏–∑–º–µ—Ä–µ–Ω–∏–µ —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—ã (—Å—Ç—Ä–æ–∫–∏ 42 – 45), –∑–∞–ø—Ä–æ—Å –Ω–∞ –µ—ë —á—Ç–µ–Ω–∏–µ (—Å—Ç—Ä–æ–∫–∏ 48 – 51), —Ä–∞–∑—Ä–µ—à–µ–Ω–∏–µ –ø–æ—Å—ã–ª–∫–∏ –Ω–æ—Ç–∏—Ñ–∏–∫–∞—Ü–∏–π (—Å—Ç—Ä–æ–∫–∏ 52 – 55), –∏ –¥–∞–ª–µ–µ —á—Ç–µ–Ω–∏–µ —Ç–µ–º–ø–µ—Ä–∞—Ç—É—Ä—ã –∏ –º–æ—Ä–≥–∞–Ω–∏–µ —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º –ø–æ –Ω–∞–∂–∞—Ç–∏–∏ –Ω–∞ –∫–Ω–æ–ø–∫—É. –ó–∞–º–µ—Ç–∏–º, —á—Ç–æ –ø–æ—Å–ª–µ —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è –æ—Ç—Å—ã–ª–∫–∏ –Ω–æ—Ç–∏—Ñ–∏–∫–∞—Ü–∏–π –º–æ–¥—É–ª—å AMS001 –æ—Ç—Å—ã–ª–∞–µ—Ç –≤ –Ω–∏—Ö —Å—Ç–∞—Ç—É—Å –∏—Å–ø–æ–ª–Ω–µ–Ω–∏—è –≤ –æ—Ç–≤–µ—Ç –Ω–∞ –ø–æ—Å—ã–ª–∫—É –≤ –Ω–µ–≥–æ –∫–∞–∂–¥–æ–π –∫–æ–º–∞–Ω–¥—ã. –¢.–æ. –º–æ–¥—É–ª—å —Ä–∞–±–æ—Ç–∞–µ—Ç –≤ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–∏–∏ —Å –æ–∂–∏–¥–∞–Ω–∏–µ–º. –û—Ç–º–µ—á—É, —á—Ç–æ –ø—É—Å—Ç—ã–µ —Å—Ç—Ä–æ–∫–∏ —É–¥–∞–ª–µ–Ω—ã –∏–∑ –ª–æ–≥–∞ —Ñ–∏–ª—å—Ç—Ä–æ–º Wireshark.
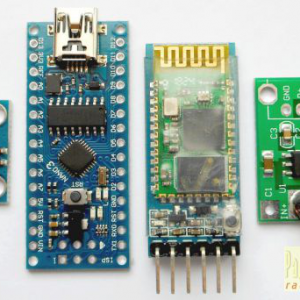
–Ý–µ–∞–ª–∏–∑–∞—Ü–∏—è –±–µ—Å–ø—Ä–æ–≤–æ–¥–Ω–æ–≥–æ UART –í –∑–∞–∫–ª—é—á–µ–Ω–∏–∏ –æ—Ç–º–µ—á—É –ø—Ä–∏–º–µ–Ω–µ–Ω–∏–µ –º–æ–¥—É–ª–µ–π –¥–ª—è –ø–æ–ø—É–ª—è—Ä–Ω–æ–≥–æ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è –±–µ—Å–ø—Ä–æ–≤–æ–¥–Ω–æ–≥–æ UART. –ò–Ω—Ç–µ—Ä–µ—Å–Ω–æ, —á—Ç–æ –¥–ª—è —ç—Ç–æ–≥–æ –Ω–µ –Ω—É–∂–Ω–æ –≤–æ–æ–±—â–µ –Ω–∏—á–µ–≥–æ –ø—Ä–æ–≥—Ä–∞–º–º–∏—Ä–æ–≤–∞—Ç—å, –ø–æ—Å–∫–æ–ª—å–∫—É –¥–∞–Ω–Ω–æ–µ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–µ –≥–æ—Ç–æ–≤–æ –∫ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏—é –ø—Ä—è–º–æ “–∏–∑ –∫–æ—Ä–æ–±–∫–∏” (—Å–º. –ø–æ–¥—Ä–æ–±–Ω–µ–µ [10]). –î–ª—è —ç—Ç–æ–≥–æ, –µ—Å—Ç–µ—Å—Ç–≤–µ–Ω–Ω–æ, –ø–æ–Ω—è–¥–æ–±—è—Ç—Å—è 2 –º–æ–¥—É–ª—è. –ú–æ–¥—É–ª–∏ –Ω–µ –¥–æ–ª–∂–Ω—ã –±—ã—Ç—å –æ–¥–∏–Ω–∞–∫–æ–≤—ã–º–∏. –í –º–æ—ë–º —ç–∫—Å–ø–µ—Ä–∏–º–µ–Ω—Ç–µ –æ–¥–∏–Ω –∏–∑ –Ω–∏—Ö AMS001 (–Ω–∏–∂–Ω–∏–π, –≥–¥–µ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∞ —Ç–∞-–∂–µ –º–æ–Ω—Ç–∞–∂–∫–∞, —á—Ç–æ –∏ —Ä–∞–Ω–µ–µ–µ), –∞ –¥—Ä—É–≥–æ–π – AMS002. –û–±–∞ –º–æ–¥—É–ª—è –ø–æ–¥–∫–ª—é—á–µ–Ω—ã –∫ –∫–æ–º–ø—å—é—Ç–µ—Ä—É —á–µ—Ä–µ–∑ USB-UART –º–æ—Å—Ç—ã –Ω–∞ –æ—Å–Ω–æ–≤–µ CP2104. –í –Ω–∏–∂–Ω–∏–π –º–æ–¥—É–ª—å –∑–∞–≥—Ä—É–∂–µ–Ω —Ç–æ—Ç-–∂–µ –ø—Ä–æ–≥—Ä–∞–º–º–Ω—ã–π –ø—Ä–æ–¥—É–∫—Ç, —á—Ç–æ –∏ —Ä–∞–Ω–µ–µ (Zentri-I2CM). –ü–æ –ø–æ–¥–∞—á–µ –ø–∏—Ç–∞–Ω–∏—è –Ω–∞ –º–æ–¥—É–ª—å –æ–Ω —Ä–∞–±–æ—Ç–∞–µ—Ç –≤ —Ä–æ–ª–∏ Peripheral, –Ω–∞—á–∏–Ω–∞–µ—Ç –ø–æ—Å—ã–ª–∫–∏ –∏–∑–≤–µ—â–µ–Ω–∏–π –æ —Å–≤–æ—ë–º —Å—É—â–µ—Å—Ç–≤–æ–≤–∞–Ω–∏–∏, –∏ –æ–∂–∏–¥–∞–µ—Ç —Å–æ–µ–¥–∏–Ω–µ–Ω–∏—è —Å –Ω–∏–º. –î–ª—è —Ç–æ–≥–æ, —á—Ç–æ–±—ã –≤—Ç–æ—Ä–æ–π –º–æ–¥—É–ª—å —Å–º–æ–≥ –ø–æ—Å–ª–∞—Ç—å –∑–∞–ø—Ä–æ—Å –Ω–∞ —Å–æ–µ–¥–∏–Ω–µ–Ω–∏–µ —Å –ø–µ—Ä–≤—ã–º, –æ–Ω –¥–æ–ª–∂–µ–Ω —Ä–∞–±–æ—Ç–∞—Ç—å –≤ —Ä–æ–ª–∏ Central. –î–ª—è —ç—Ç–æ–≥–æ –≤ –Ω–µ–≥–æ —Å–ª–µ–¥—É–µ—Ç –∑–∞–≥—Ä—É–∑–∏—Ç—å –ø—Ä–æ–≥—Ä–∞–º–º–Ω—ã–π –ø—Ä–æ–¥—É–∫—Ç Zentri-DUAL. –ü–æ–¥–∫–ª—é—á–∞–µ–º –æ–±–∞ –º–æ–¥—É–ª—è –≤ USB –ø–æ—Ä—Ç—ã –æ–¥–Ω–æ–≥–æ –∏–ª–∏ —Ä–∞–∑–Ω—ã—Ö –∫–æ–º–ø—å—é—Ç–µ—Ä–æ–≤ –∏ –æ—Ç–∫—Ä—ã–≤–∞–µ–º Tera-Term –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è –¥–ª—è –∫–∞–∂–¥–æ–≥–æ –∏–∑ –Ω–∏—Ö. –ü–æ —É–º–æ–ª—á–∞–Ω–∏—é –æ–±–∞ –º–æ–¥—É–ª—è —Ä–∞–±–æ—Ç–∞—é—Ç –≤ —Ä–µ–∂–∏–º–µ –ø–æ–¥–∞—á–∏ –ª–æ–∫–∞–ª—å–Ω—ã—Ö –∫–æ–º–∞–Ω–¥. –î–ª—è –ø—Ä–æ–≤–µ—Ä–∫–∏ –ø—Ä–∞–≤–∏–ª—å–Ω–æ—Å—Ç–∏ —É—Å—Ç–∞–Ω–æ–≤–∫–∏ –Ω–∞–¥–ª–µ–∂–∞—â–∏—Ö –ø—Ä–æ–≥—Ä–∞–º–º–Ω—ã—Ö –ø—Ä–æ–¥—É–∫—Ç–æ–≤ —è –ø–æ–¥–∞–ª –≤ –Ω–∏—Ö –∫–æ–º–∞–Ω–¥—ã ver. –ö–∞–∫ –≤–∏–¥–Ω–æ –∏–∑ –ª–æ–≥–∞ —Å–µ—Å—Å–∏–∏, –ø—Ä–æ–≥—Ä–∞–º–º–Ω—ã–µ –ø—Ä–æ–¥—É–∫—Ç—ã –≤ –ø–µ—Ä–≤–æ–º –º–æ–¥—É–ª–µ (—Å–ª–µ–≤–∞) –∏ –≤–æ –≤—Ç–æ—Ä–æ–º (—Å–ø—Ä–∞–≤–∞) —Ç–∞–∫–∏–µ, –∫–∞–∫ –¥–æ–ª–∂–Ω—ã –±—ã—Ç—å.
–î–ª—è —Å–∫–∞–Ω–∏—Ä–æ–≤–∞–Ω–∏—è –≤—Ç–æ—Ä—ã–º –º–æ–¥—É–ª–µ–º Bluetooth —É—Å—Ç—Ä–æ–π—Å—Ç–≤ –≤ –Ω–µ–≥–æ —Å–ª–µ–¥—É–µ—Ç –ø–æ–¥–∞—Ç—å –∫–æ–º–∞–Ω–¥—É scan high. –ß–µ—Ä–µ–∑ –ø–∞—Ä—É —Å–µ–∫—É–Ω–¥ –≤ –æ–∫–Ω–µ —Ç–µ—Ä–º–∏–Ω–∞–ª–∞ –ø–æ–∫–∞–∂–µ—Ç—Å—è —Å–ø–∏—Å–æ–∫ –æ–±–Ω–∞—Ä—É–∂–µ–Ω–Ω—ã—Ö —É—Å—Ç—Ä–æ–π—Å—Ç–≤, —Å—Ä–µ–¥–∏ –∫–æ—Ç–æ—Ä—ã—Ö –æ–∫–∞–∂–µ—Ç—Å—è –∏ –ø–µ—Ä–≤—ã–π –º–æ–¥—É–ª—å. –í –Ω–∞—à–µ–º —Å–ª—É—á–∞–µ —Å–ø–∏—Å–æ–∫ —Å–æ—Å—Ç–æ–∏—Ç —Ç–æ–ª—å–∫–æ –∏–∑ –Ω–∞—à–µ–≥–æ –º–æ–¥—É–ª—è, –≥–¥–µ –æ–Ω —É–∫–∞–∑–∞–Ω –ø–æ–¥ –Ω–æ–º–µ—Ä–æ–º 1. –î–ª—è –∏–Ω–∏—Ü–∏–∞–ª–∏–∑–∞—Ü–∏–∏ —Å–æ–µ–¥–∏–Ω–µ–Ω–∏—è —Å –º–æ–¥—É–ª–µ–º –ø–æ–¥ —ç—Ç–∏–º –Ω–æ–º–µ—Ä–æ–º –≤ —Å–ø–∏—Å–∫–µ, –≤ –æ–∫–Ω–µ –≤—Ç–æ—Ä–æ–≥–æ –ø–æ–¥–∞—ë–º –∫–æ–º–∞–Ω–¥—É con 1. –ü—Ä–∏ —ç—Ç–æ–º —Å–æ–µ–¥–∏–Ω–µ–Ω–∏–µ —É—Å—Ç–∞–Ω–æ–≤–∏—Ç—Å—è –∏ –æ–±–∞ –º–æ–¥—É–ª—è –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏ –ø–µ—Ä–µ–π–¥—É—Ç –≤ —Ä–µ–∂–∏–º –ø–æ—Ç–æ–∫–æ–≤–æ–π –ø–µ—Ä–µ–¥–∞—á–∏ –¥–∞–Ω–Ω—ã—Ö stream. –¢–µ–ø–µ—Ä—å —Ç–µ–∫—Å—Ç, –ø–µ—á–∞—Ç–∞–µ–º—ã–π –≤ –æ–∫–Ω–µ –ø–µ—Ä–≤–æ–≥–æ –º–æ–¥—É–ª—è, –ø–µ—Ä–µ–¥–∞—Å—Ç—Å—è —á–µ—Ä–µ–∑ Bluetooth –≤—Ç–æ—Ä–æ–º—É –∏ –æ—Ç–æ–±—Ä–∞–∑–∏—Ç—Å—è –≤ –µ–≥–æ –æ–∫–Ω–µ. –ò –Ω–∞–æ–±–æ—Ä–æ—Ç. –°–æ–µ–¥–∏–Ω–µ–Ω–∏–µ –∏, —Å–ª–µ–¥–æ–≤–∞—Ç–µ–ª—å–Ω–æ, –æ–±–º–µ–Ω –¥–∞–Ω–Ω—ã–º–∏ –º–æ–¥—É–ª–µ–π –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç —Å –¥–µ—Ñ–æ–ª—Ç–Ω—ã–º –ø–µ—Ä–∏–æ–¥–æ–º 7.5 –º—Å. –ù–µ–∫–æ–ª—å–∫–æ –∑–∞–º–µ—á–∞–Ω–∏–π. –í–æ-–ø–µ—Ä–≤—ã—Ö, –¥–ª—è –Ω–∞–¥—ë–∂–Ω–æ–π —Ä–∞–±–æ—Ç—ã –º–æ—Å—Ç–æ–≤ –∏ UART –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å–æ–≤ –º–æ–¥—É–ª–µ–π –Ω–∞ –≤—ã—Å–æ–∫–∏—Ö —Å–∫–æ—Ä–æ—Å—Ç—è—Ö —Å–ª–µ–¥—É–µ—Ç –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å 4-–ø—Ä–æ–≤–æ–¥–Ω—ã–π UART —Å –∑–∞–¥–µ–π—Å—Ç–≤–æ–≤–∞–Ω–∏–µ–º —Å–∏–≥–Ω–∞–ª–æ–≤ RTS –∏ CTS. –¢–∞–∫–æ–≤–æ–π —É–∂–µ —Ä–µ–∞–ª–∏–∑–æ–≤–∞–Ω –≤ –º–æ–¥—É–ª—è—Ö (–∏ USB –º–æ—Å—Ç–∞—Ö), —è –µ–≥–æ –Ω–µ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–ª –∏—Å–∫–ª—é—á–∏—Ç–µ–ª—å–Ω–æ –≤ —Ü–µ–ª—è—Ö –ø—Ä–æ—Å—Ç–æ—Ç—ã. –ï—Å–ª–∏ –ø–µ—Ä–µ–¥–∞–≤–∞—Ç—å –¥–∞–Ω–Ω—ã–µ —Å–æ —Å–∫–æ—Ä–æ—Å—Ç—å—é –ø–µ—á–∞—Ç–∞–Ω–∏—è –Ω–∞ –∫–ª–∞–≤–∏–∞—Ç—É—Ä–µ —á–µ–ª–æ–≤–µ–∫–æ–º, –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ –∏ 2-–ø—Ä–æ–≤–æ–¥–Ω–æ–≥–æ UART. –í–æ –≤—Ç–æ—Ä—ã—Ö, –≤–Ω–∏–º–∞—Ç–µ–ª—å–Ω—ã–π —á–∏—Ç–∞—Ç–µ–ª—å –º–æ–∂–µ—Ç –∑–∞–º–µ—Ç–∏—Ç—å, —á—Ç–æ –≤ –Ω–∞—à–µ–º —ç–∫—Å–ø–µ—Ä–∏–º–µ–Ω—Ç–µ –∏–Ω–∏—Ü–∏–∞–ª–∏–∑–∞—Ü–∏—è —Å–æ–µ–¥–∏–Ω–µ–Ω–∏—è –º–æ–∂–µ—Ç –±—ã—Ç—å —Å–æ–≤–µ—Ä—à–µ–Ω–∞ —Ç–æ–ª—å–∫–æ –≤—Ç–æ—Ä—ã–º –º–æ–¥—É–ª–µ–º. –î–ª—è –∏—Å–∫–ª—é—á–µ–Ω–∏—è —ç—Ç–æ–≥–æ –Ω–µ–¥–æ—Å—Ç–∞—Ç–∫–∞ —Å–ª–µ–¥—É–µ—Ç –∑–∞–≥—Ä—É–∑–∏—Ç—å –ø—Ä–æ–≥—Ä–∞–º–º–Ω—ã–π –ø—Ä–æ–¥—É–∫—Ç Zentri-DUAL –≤ –æ–±–∞ –º–æ–¥—É–ª—è. –ü—Ä–∏ –º–æ—â–Ω–æ—Å—Ç–∏ –ø–µ—Ä–µ–¥–∞—á–∏ +4dBm —Ä–∞–¥–∏—É—Å –Ω–∞–¥—ë–∂–Ω–æ–π —Å–≤—è–∑–∏ –º–µ–∂–¥—É –º–æ–¥—É–ª—è–º–∏ –ø–æ–ª—É—á–∞–µ—Ç—Å—è –æ–∫–æ–ª–æ 40-50–º –∏ –∑–∞–≤–∏—Å–∏—Ç –æ—Ç –æ–∫—Ä—É–∂–∞—é—â–∏—Ö –º–æ–¥—É–ª–∏ –ø—Ä–µ–¥–º–µ—Ç–æ–≤ –∏ –æ—Ä–∏–µ–Ω—Ç–∞—Ü–∏–∏ –∏—Ö –∞–Ω—Ç–µ–Ω–Ω. –õ–∏—Ç–µ—Ä–∞—Ç—É—Ä–∞ 1. Zentri Products
–§–∞–π–ª—ã: –í—Å–µ –≤–æ–ø—Ä–æ—Å—ã –≤ –§–æ—Ä—É–º.
–≠—Ç–∏ —Å—Ç–∞—Ç—å–∏ –≤–∞–º —Ç–æ–∂–µ –º–æ–≥—É—Ç –ø—Ä–∏–≥–æ–¥–∏—Ç—å—Å—è: |
|
|||||||||||||||
 |
 |


 |
||||

|
||||
















–Ý–∞–±–æ—Ç–æ—Å–ø–æ—Å–æ–±–Ω–æ—Å—Ç—å —Å–∞–π—Ç–∞ –ø—Ä–æ–≤–µ—Ä–µ–Ω–∞ –≤ –±—Ä–∞—É–∑–µ—Ä–∞—Ö:
IE8.0, Opera 9.0, Netscape Navigator 7.0, Mozilla Firefox 5.0
–ê–¥–∞–ø—Ç–∏—Ä–æ–≤–∞–Ω –¥–ª—è —Ä–∞–±–æ—Ç—ã –ø—Ä–∏ —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è—Ö —ç–∫—Ä–∞–Ω–∞ –æ—Ç 1280—Ö1024 –∏ –≤—ã—à–µ.
–ü—Ä–∏ –º–µ–Ω—å—à–∏—Ö —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è—Ö –≤–æ–∑–º–æ–∂–Ω–æ –ø–æ—è–≤–ª–µ–Ω–∏–µ –≥–æ—Ä–∏–∑–æ–Ω—Ç–∞–ª—å–Ω–æ–π –ø—Ä–æ–∫—Ä—É—Ç–∫–∏.
–ü–æ –≤—Å–µ–º –≤–æ–ø—Ä–æ—Å–∞–º –æ–±—Ä–∞—â–∞–π—Ç–µ—Å—å –∫ –ö–æ—Ç—É: kot@radiokot.ru
©2005-2026