 |
 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
–ú–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä—ã. –ù–∞—á–∞–ª–æ. STM32.
–ê–≤—Ç–æ—Ä: –ê–ª–µ–∫—Å–∞–Ω–¥—Ä –°–∫–∞–ª–¥—É—Ü–∫–∏–π, scelikr@gmail.com –ú–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä—ã –¥–ª—è –∫–æ—Ç—è—Ç –í—Å–µ–º –ú—è—É, –∫–æ—Ç–∞–Ω—ã :) –ö–∞–∫-—Ç–æ —Ä–∞–∑ –æ—Ç –º–µ–Ω—è —É—à–ª–∞ –∫–æ—à–∫–∞ :( –ù—É –∏ —á–µ–º –≤–∞–ª–µ—Ä—å—è–Ω–∫—É –ª–æ–ø–∞—Ç—å, —è —Ä–µ—à–∏–ª –∑–∞–Ω—è—Ç—å—Å—è –¥–µ–ª–æ–º, —Ç–∞–∫ —Å–∫–∞–∑–∞—Ç—å «–Ω–∞ –±–ª–∞–≥–æ –Ý–æ–¥–∏–Ω–µ». –î–∞–≤–Ω–æ —É–∂ —Ö–æ—Ç–µ–ª —Ü–∏—Ñ—Ä–æ–≤—ã–º–∏ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞–º–∏ –∑–∞–Ω—è—Ç—å—Å—è, –¥–∞ –≤—Ä–µ–º–µ–Ω–∏ –Ω–µ –±—ã–ª–æ (—Å–∞–º–∏ –ø–æ–Ω–∏–º–∞–µ—Ç–µ, —Ç–æ —Å–ø–∞—Ç—å, —Ç–æ —Å –∫–æ—à–∫–æ–π –ø–æ –∫—Ä—ã—à–∞–º –≥—É–ª—è—Ç—å), –∞ —Ç—É—Ç –∫–∞–∫ —Ä–∞–∑ –≤—Ä–µ–º—è-—Ç–æ –∏ –ø–æ—è–≤–∏–ª–æ—Å—å. –ù—É-—Å –Ω–∞—á–Ω—ë–º..) –í—Å—ë –∫–∞–∫ –æ–±—ã—á–Ω–æ –Ω–∞—á–∏–Ω–∞–µ—Ç—Å—è —Å –≤—ã–±–æ—Ä–∞. –ù—É –≤—Ä–æ–¥–µ –≤—ã–±–æ—Ä-—Ç–æ –Ω–µ–±–æ–ª—å—à–æ–π PIC, –¥–∞ AVR. –ü–æ—Å–ª–µ–¥–Ω–∏–µ –º–Ω–µ –∫–∞–∫-—Ç–æ –±–æ–ª—å—à–µ –ø—Ä–∏–≥–ª—è–Ω—É–ª–∏—Å—å. –ù—É–∂–µ–Ω –±—ã–ª –µ—â—ë –∏ USB –ø—Ä–æ–≥—Ä–∞–º–º–∞—Ç–æ—Ä –∑–∞ –Ω–µ–∏–º–µ–Ω–∏–µ–º –¥—Ä—É–≥–∏—Ö –ø–æ—Ä—Ç–æ–≤ –Ω–∞ –∫–æ–º–ø—å—é—Ç–µ—Ä–µ, –æ—Ç —Ü–µ–Ω—ã –∫–æ—Ç–æ—Ä–æ–≥–æ —É –º–µ–Ω—è —á—É—Ç—å —Ö–≤–æ—Å—Ç –Ω–µ –æ—Ç–≤–∞–ª–∏–ª—Å—è. –ï—â—ë Arduino –µ—Å—Ç—å - –∑–≤–µ—Ä—ë–∫ —Ç–∞–∫–æ–π. –ï–≥–æ –∏ –ø—Ä–æ–≥—Ä–∞–º–º–∏—Ä–æ–≤–∞—Ç—å –ø–æ USB –º–æ–∂–Ω–æ. –ù—É, –¥—É–º–∞—é, "—Ç–æ —á—Ç–æ –¥–æ–∫—Ç–æ—Ä –ø—Ä–æ–ø–∏—Å–∞–ª". –í —Å–µ–ª–µ –Ω–∞—à–µ–º –µ–≥–æ —Ç–æ–ª—å–∫–æ —á–µ—Ä–µ–∑ –∏–Ω—Ç–µ—Ä–Ω–µ—Ç-–º–∞–≥–∞–∑–∏–Ω –¥–æ—Å—Ç–∞—Ç—å –º–æ–∂–Ω–æ. –ù–∞—à—ë–ª, –≥–¥–µ –ø–æ-–≤—ã–≥–æ–¥–Ω–µ–π, —á—É—Ç—å –Ω–µ –∫—É–ø–∏–ª –∏... –û–ü–ê! –°–º–æ—Ç—Ä—é - STM32VL-Discovery. –ß—Ç–æ –∑–∞ –∑–≤–µ—Ä—å —Ç–∞–∫–æ–π? –•–º, STM32.. –ß—Ç–æ-—Ç–æ —Å–ª—ã—à–∞–ª –∫—Ä–∞–µ–º —É—Ö–∞.. –ê –æ—Ç —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫ —É—Å—ã –¥—ã–±–æ–º, —á–µ—Å—Ç–Ω–æ! –ê –ª–∞–ø-—Ç–æ —É –Ω–µ—ë —Å–∫–æ–ª—å–∫–æ!
–ò—Ç–∞–∫, –ø–æ–ø–æ—Ä—è–¥–∫—É:
–ê —á—Ç–æ –¥–∞–ª—å—à–µ? –í STM32VL-Discovery –µ—Å—Ç—å –≤—Å—Ç—Ä–æ–µ–Ω–Ω—ã–π –ø—Ä–æ–≥—Ä–∞–º–º–∞—Ç–æ—Ä/–æ—Ç–ª–∞–¥—á–∏–∫, –∫–æ—Ç–æ—Ä—ã–π –ª—ë–≥–∫–∏–º –¥–≤–∏–∂–µ–Ω–∏–µ–º –ª–∞–ø—ã (—Å–Ω—è—Ç–∏–µ–º –ø–µ—Ä–µ–º—ã—á–µ–∫) –º–æ–∂–µ—Ç –ø—Ä–æ–≥—Ä–∞–º–º–∏—Ä–æ–≤–∞—Ç—å –∏ –æ—Ç–ª–∞–∂–∏–≤–∞—Ç—å (–æ—Ç–ª–∞–¥–∫–∞ –æ—á–µ–Ω—å —É–∂ –≤–µ—â—å –ø–æ–ª–µ–∑–Ω–∞—è, –Ω–æ –æ–± —ç—Ç–æ–º —á—É—Ç—å –ø–æ–∑–∂–µ) –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä—ã STM32 –∑–∞ –ø—Ä–µ–¥–µ–ª–∞–º–∏ –ø–ª–∞—Ç—ã. –° Arduino —Ç–∞–∫–æ–µ –Ω–µ –ø—Ä–æ–∫–∞—Ç–∏—Ç. –¢–æ –µ—Å—Ç—å –∏—Å–ø–æ–ª—å–∑—É—è STM32VL-Discovery –º—ã –∏ –¥–µ–Ω—å–≥–∏ —ç–∫–æ–Ω–æ–º–∏–º –∏ –ø–æ–ª—É—á–∞–µ–º –±–æ–ª—å—à—É—é –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç–µ–ª—å–Ω–æ—Å—Ç—å –∏ —Å–≤–æ–±–æ–¥—É —Ç–≤–æ—Ä—á–µ—Å—Ç–≤–∞ :) –î–∞ –∏ —Å–∞–º–∏ –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä—ã STM32 –≤—ã–≥–ª—è–¥—è—Ç –ø—Ä–∏–≤–ª–µ–∫–∞—Ç–µ–ª—å–Ω–µ–π –æ—Å—Ç–∞–ª—å–Ω—ã—Ö:
–ê –µ—â—ë STM32 32-—Ö —Ä–∞–∑—Ä—è–¥–Ω—ã–µ, –∞ —ç—Ç–æ –æ–∑–Ω–∞—á–∞–µ—Ç –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç—å —Ä–∞–±–æ—Ç—ã —Å 32-—Ö –±–∏—Ç–Ω—ã–º–∏ –¥–∞–Ω–Ω—ã–º–∏ –∑–∞ –æ–¥–∏–Ω —Ç–∞–∫—Ç. AVR –∏ PIC —ç—Ç–∏–º –Ω–µ –ø–æ—Ö–≤–∞—Å—Ç–∞—é—Ç—Å—è.
–ù—É —á—Ç–æ, –∫–æ—Ç–∞–Ω—ã, —É–±–µ–¥–∏–ª? –¢–æ–≥–¥–∞ –Ω–∞—á–Ω—ë–º –∫—É—Ä—Å –º–æ–ª–æ–¥–æ–≥–æ –±–æ–π—Ü–∞ —Ü–∏—Ñ—Ä–æ–≤–∏–∫–∞!) –ö–∞–∫ –æ–Ω–æ —Ä–∞–±–æ—Ç–∞–µ—Ç? –ò–∑ —á–µ–≥–æ —Å–æ—Å—Ç–æ–∏—Ç? –ß—Ç–æ —É–º–µ–µ—Ç? –ö–∞–∫ –∏–∑–≤–µ—Å—Ç–Ω–æ, –≤—Å–µ –∫–æ—Ç—ã –æ—á–µ–Ω—å –ª—é–±–æ–∑–Ω–∞—Ç–µ–ª—å–Ω—ã–µ, –∞ —Ä–∞–¥–∏–æ–∫–æ—Ç—ã –æ—Å–æ–±–µ–Ω–Ω–æ! –ú–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä - —ç—Ç–æ –º–∏–∫—Ä–æ—Å—Ö–µ–º–∞ —Å–æ—á–µ—Ç–∞—é—â–∞—è –≤ —Å–µ–±–µ —Ñ—É–Ω–∫—Ü–∏–∏ –ø—Ä–æ—Ü–µ—Å—Å–æ—Ä–∞, –ø–µ—Ä–∏—Ñ–µ—Ä–∏–∏, –∏–º–µ—é—â–∞—è –û–ó–£, flash –ø–∞–º—è—Ç—å. –ö–∞–∫ –∫–æ–º–ø—å—é—Ç–µ—Ä, —Ç–æ–ª—å–∫–æ –º–µ–Ω—å—à–µ! –ü—Ä–æ–≤–µ–¥—ë–º –∞–Ω–∞–ª–æ–≥–∏—é: –∫–æ–º–ø—å—é—Ç–µ—Ä–æ–º —É–ø—Ä–∞–≤–ª—è–µ—Ç –æ–ø–µ—Ä–∞—Ü–∏–æ–Ω–Ω–∞—è —Å–∏—Å—Ç–µ–º–∞, –∞ –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–æ–º «–ø—Ä–æ—à–∏–≤–∫–∞», –∫–æ—Ç–æ—Ä—É—é –ø–∏—à–µ—Ç–µ –í—ã; –æ–ø–µ—Ä–∞—Ü–∏–æ–Ω–Ω–∞—è —Å–∏—Å—Ç–µ–º–∞ –∫–æ–º–ø—å—é—Ç–µ—Ä–∞ —Ö—Ä–∞–Ω–∏—Ç—Å—è –Ω–∞ –∂—ë—Å—Ç–∫–æ–º –¥–∏—Å–∫–µ, «–ø—Ä–æ—à–∏–≤–∫–∞» –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞ –≤ –µ–≥–æ flash –ø–∞–º—è—Ç–∏; —Ñ—É–Ω–∫—Ü–∏–∏ –û–ó–£ —Å—Ö–æ–∂–∏ - —Ö—Ä–∞–Ω–µ–Ω–∏–µ –∏–∑–º–µ–Ω—è—é—â–∏—Ö—Å—è –¥–∞–Ω–Ω—ã—Ö –≤–æ –≤—Ä–µ–º—è –≤—ã–ø–æ–ª–Ω–µ–Ω–∏—è –ø—Ä–æ–≥—Ä–∞–º–º—ã. –ê –µ—â—ë —É –ú–ö –µ—Å—Ç—å —Ä–∞–∑–ª–∏—á–Ω—ã–µ –ø–µ—Ä–∏—Ñ–µ—Ä–∏–π–Ω—ã–µ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞, —Ç–∞–∫–∏–µ –∫–∞–∫ –ê–¶–ü –∏ –¶–ê–ü –Ω–∞–ø—Ä–∏–º–µ—Ä. –ú–ö –æ–±—â–∞–µ—Ç—Å—è —Å –≤–Ω–µ—à–Ω–∏–º –º–∏—Ä–æ–º –ø—Ä–∏ –ø–æ–º–æ—â–∏ –ª–∞–ø –Ω–∞ –µ–≥–æ –∫–æ—Ä–ø—É—Å–µ (–Ω–µ —Ç–∞–∫–∏—Ö –∫–∞–∫ —É –∫–æ—Ç–æ–≤, –∫–æ–Ω–µ—á–Ω–æ, –∞ –º–µ—Ç–∞–ª–ª–∏—á–µ—Å–∫–∏—Ö). –ù–æ –Ω–µ –≤—Å–µ –∏–∑ –Ω–∏—Ö —É–ø—Ä–∞–≤–ª—è—é—Ç—Å—è –ø—Ä–æ–≥—Ä–∞–º–º–æ–π, –µ—Å—Ç—å –≤—ã–≤–æ–¥—ã –ø–∏—Ç–∞–Ω–∏—è, –≤—ã–≤–æ–¥ —Å–±—Ä–æ—Å–∞, –≤—ã–≤–æ–¥—ã –ø–∏—Ç–∞–Ω–∏—è –ø–µ—Ä–∏—Ñ–µ—Ä–∏–∏, –≤—ã–≤–æ–¥ —Ä–µ–∑–µ—Ä–≤–Ω–æ–≥–æ –ø–∏—Ç–∞–Ω–∏—è. –ê —Ç–µ, –∫–æ—Ç–æ—Ä—ã–µ —É–ø—Ä–∞–≤–ª—è—é—Ç—Å—è –ø—Ä–æ–≥—Ä–∞–º–º–æ–π –¥–µ–ª—è—Ç—Å—è –Ω–∞ –≥—Ä—É–ø–ø—ã –Ω–∞–∑—ã–≤–∞–µ–º—ã–µ «–ø–æ—Ä—Ç—ã». –í—Å–µ —ç—Ç–∏ —É–ø—Ä–∞–≤–ª—è–µ–º—ã–µ –≤—ã–≤–æ–¥—ã –Ω–∞–∑—ã–≤–∞—é—Ç—Å—è 2-–º—è –±—É–∫–≤–∞–º–∏ –∏ —Ü–∏—Ñ—Ä–æ–π. –ù–∞–ø—Ä–∏–º–µ—Ä PA1: P - –ø–æ—Ä—Ç, –ê - –ø–æ—Ä—Ç «–ê», 1 - –Ω–æ–º–µ—Ä –≤—ã–≤–æ–¥–∞ —ç—Ç–æ–≥–æ –ø–æ—Ä—Ç–∞. –í –ø—Ä–æ–≥—Ä–∞–º–º–µ –ø–æ—Ä—Ç—ã –∫–æ–Ω—Ñ–∏–≥—É—Ä–∏—Ä—É—é—Ç—Å—è –ª–∏–±–æ –Ω–∞ –≤—Ö–æ–¥, –ª–∏–±–æ –Ω–∞ –≤—ã—Ö–æ–¥, –ø–æ –≤–∞—à–µ–º—É –∂–µ–ª–∞–Ω–∏—é. –í—ã–≤–æ–¥—ã –ø–æ—Ä—Ç–∞ –Ω–∞—Å—Ç—Ä–æ–µ–Ω–Ω–æ–≥–æ –Ω–∞ –≤—Ö–æ–¥ –º–æ–≥—É—Ç –±—ã—Ç—å –≤ —Ä–∞–∑–Ω—ã—Ö —Ä–µ–∂–∏–º–∞—Ö, –¥–ª—è –∫–∞–∂–¥–æ–≥–æ –≤—ã–≤–æ–¥–∞ –æ–Ω –º–æ–∂–µ—Ç –±—ã—Ç—å —Å–≤–æ–∏–º:
–ê —É –ø–æ—Ä—Ç–∞ –Ω–∞—Å—Ç—Ä–æ–µ–Ω–Ω–æ–≥–æ –Ω–∞ –≤—ã—Ö–æ–¥ –≤—ã–≤–æ–¥—ã –º–æ–≥—É—Ç –±—ã—Ç—å –≤ —Ç–∞–∫–∏—Ö —Ä–µ–∂–∏–º–∞—Ö:
–ù–æ –Ω–µ –≤—Å–µ –≤—ã–≤–æ–¥—ã –º–æ–∂–Ω–æ –Ω–∞–∑–Ω–∞—á–∞—Ç—å «–∫–∞–∫ –∑–∞—Ö–æ—á–µ—Ç—Å—è». –î–ª—è —Ç–æ–≥–æ, —á—Ç–æ –±—ã —É–∑–Ω–∞—Ç—å, —á—Ç–æ –º–æ–∂–Ω–æ, –∞ —á—Ç–æ –Ω–µ–ª—å–∑—è –Ω—É–∂–Ω–æ –ø–æ—Å–º–æ—Ç—Ä–µ—Ç—å –¥–æ–∫—É–º–µ–Ω—Ç–∞—Ü–∏—é (—Ç–∞–±–ª–∏—Ü–∞ 4) –∏–ª–∏ –≤–æ—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å—Å—è –ø—Ä–æ–≥—Ä–∞–º–º–æ–π MicroXplorer. –ü–µ—Ä–µ–¥ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏–µ–º –ø–æ—Ä—Ç–∞ –µ–≥–æ –Ω—É–∂–Ω–æ —Å–Ω–∞—á–∞–ª–∞ —Ç–∞–∫—Ç–∏—Ä–æ–≤–∞—Ç—å - –ø–æ–¥–∞–≤–∞—Ç—å –Ω–∞ –Ω–µ–≥–æ —Ç–∞–∫—Ç–æ–≤—ã–µ –∏–º–ø—É–ª—å—Å—ã, —Ç.–∫. –∏–∑–Ω–∞—á–∞–ª—å–Ω–æ –æ–Ω–∏ –Ω–µ –ø–æ–¥–∞—é—Ç—Å—è –¥–ª—è —ç–∫–æ–Ω–æ–º–∏–∏ —ç–Ω–µ—Ä–≥–∏–∏. –ú–æ–∂–Ω–æ –≤—ã–±—Ä–∞—Ç—å —Ä–∞–∑–Ω—É—é —á–∞—Å—Ç–æ—Ç—É —Ç–∞–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏—è - –±–æ–ª—å—à–µ —á–∞—Å—Ç–æ—Ç–∞ - –±—ã—Å—Ç—Ä–µ–µ —Ä–∞–±–æ—Ç–∞—é—Ç –≤—Ö–æ–¥—ã –∏–ª–∏ –≤—ã—Ö–æ–¥—ã —ç—Ç–æ–≥–æ –ø–æ—Ä—Ç–∞, –Ω–æ –∏ –±–æ–ª—å—à–µ –ø–æ—Ç—Ä–µ–±–ª–µ–Ω–∏–µ —ç–Ω–µ—Ä–≥–∏–∏. –ï—â—ë –µ—Å—Ç—å –≤—ã–≤–æ–¥—ã BOOT 0 –∏ BOOT 1. –≠—Ç–∏ –≤—ã–≤–æ–¥—ã –Ω–µ –æ—Ç–Ω–æ—Å—è—Ç—Å—è –∫ –ø–æ—Ä—Ç–∞–º, –æ–Ω–∏ —Å–ª—É–∂–∞—Ç –¥–ª—è —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è –∑–∞–≥—Ä—É–∑–∫–æ–π –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞. –ï—Å–ª–∏ –≤–æ –≤—Ä–µ–º—è –ø–æ–¥–∞—á–∏ –ø–∏—Ç–∞–Ω–∏—è –Ω–∞ –≤—ã–≤–æ–¥–µ BOOT 0 –ª–æ–≥–∏—á–µ—Å–∫–∏–π –Ω–æ–ª—å (–≤—ã–≤–æ–¥ —Å–æ–µ–¥–∏–Ω–µ–Ω —Å –æ–±—â–µ–π —Ç–æ—á–∫–æ–π), —Ç–æ –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –≤—ã–ø–æ–ª–Ω—è–µ—Ç –ø—Ä–æ–≥—Ä–∞–º–º—É –∑–∞–≥—Ä—É–∂–µ–Ω–Ω—É—é –≤–æ flash –ø–∞–º—è—Ç—å, —Ç.–µ. –í–∞—à—É –ø—Ä–æ—à–∏–≤–∫—É. –ï—Å–ª–∏ –≤–æ –≤—Ä–µ–º—è –ø–æ–¥–∞—á–∏ –ø–∏—Ç–∞–Ω–∏—è –Ω–∞ –≤—ã–≤–æ–¥–µ BOOT 0 –ª–æ–≥–∏—á–µ—Å–∫–∞—è –µ–¥–µ–Ω–∏—Ü–∞ (–≤—ã–≤–æ–¥ —Å–æ–µ–¥–∏–Ω–µ–Ω —Å –ø–∏—Ç–∞–Ω–∏–µ–º –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞), –∞ –Ω–∞ –≤—ã–≤–æ–¥–µ BOOT 1 –ª–æ–≥–∏—á–µ—Å–∫–∏–π –Ω–æ–ª—å, —Ç–æ –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –≤—ã–ø–æ–ª–Ω—è–µ—Ç –Ω–µ –í–∞—à—É –ø—Ä–æ—à–∏–≤–∫—É, –∞ –∑–∞–ø–∏—Å–∞–Ω–Ω—ã–π –Ω–∞ –∑–∞–≤–æ–¥–µ –∑–∞–≥—Ä—É–∑—á–∏–∫. –ó–∞–ø–æ–º–Ω–∏—Ç–µ —ç—Ç–æ! –í—ã –±—É–¥–µ—Ç–µ —á–∞—Å—Ç–æ –ø–æ–ª—å–∑–æ–≤–∞—Ç—å—Å—è —ç—Ç–∏–º –≤ –ø—Ä–æ—Ü–µ—Å—Å–µ —Ä–∞–±–æ—Ç—ã —Å –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞–º–∏ STM32! –ò–Ω–æ–≥–¥–∞ –∑–∞–≥—Ä—É–∑–∫–∞ –∑–∞–ø–∏—Å–∞–Ω–Ω–æ–≥–æ —Å –∑–∞–≤–æ–¥–∞ –∑–∞–≥—Ä—É–∑—á–∏–∫–∞ - –µ–¥–∏–Ω—Å—Ç–≤–µ–Ω–Ω—ã–π —Å–ø–æ—Å–æ–± –∑–∞–ø–∏—Å–∞—Ç—å/–∏–∑–º–µ–Ω–∏—Ç—å –ø—Ä–æ—à–∏–≤–∫—É –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞. –≠—Ç–æ –±—ã–≤–∞–µ—Ç –Ω–∞–ø—Ä–∏–º–µ—Ä –ø—Ä–∏ –∫–æ–Ω—Ñ–∏–≥—É—Ä–∏—Ä–æ–≤–∞–Ω–∏–∏ –≤ –ø—Ä–æ—à–∏–≤–∫–µ –≤—ã–≤–æ–¥–æ–≤, –∫ –∫–æ—Ç–æ—Ä—ã–º –ø–æ–¥–∫–ª—é—á–∞–µ—Ç—Å—è –ø—Ä–æ–≥—Ä–∞–º–º–∞—Ç–æ—Ä –∏–ª–∏ –ø—Ä–∏ –ø—Ä–æ—à–∏–≤–∫–µ –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞ –±–µ–∑ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏—è –ø—Ä–æ–≥—Ä–∞–º–º–∞—Ç–æ—Ä–∞. –¢–∞–∫ —á—Ç–æ –Ω–∞—Å—Ç–æ—è—Ç–µ–ª—å–Ω–æ —Ä–µ–∫–æ–º–µ–Ω–¥—É—é –ø—Ä–∏ –ø—Ä–æ–µ–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏–∏ –ø–µ—á–∞—Ç–Ω–æ–π –ø–ª–∞—Ç—ã —ç—Ç–∏ –≤—ã–≤–æ–¥—ã (–∏–ª–∏ —Ö–æ—Ç—è –±—ã BOOT 0) —Ä–∞—Å–ø–æ–ª–æ–≥–∞—Ç—å –≤ —É–¥–æ–±–Ω–æ–º –º–µ—Å—Ç–µ. –í–æ—Ç —Ä–∞–∑–æ–±—Ä–∞–ª–∏—Å—å :) –¢–µ–ø–µ—Ä—å –∑–Ω–∞–µ–º —á—Ç–æ —Ç–∞–∫–æ–µ –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä, –∏–∑ —á–µ–≥–æ –æ–Ω —Å–æ—Å—Ç–æ–∏—Ç. –°–µ–π—á–∞—Å —É–∑–Ω–∞–µ–º –µ—â—ë –æ –Ω–µ–∫–æ—Ç–æ—Ä—ã—Ö –ø—Ä–µ–º—É–¥—Ä–æ—Å—Ç—è—Ö –∏ –ø–µ—Ä–µ–π–¥—ë–º –∫ —Å–∞–º–æ–º—É –∏–Ω—Ç–µ—Ä–µ—Å–Ω–æ–º—É - –ø—Ä–∞–∫—Ç–∏–∫–µ! –ü—Ä–æ–≥—Ä–∞–º–º–∞ –≤ –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ –≤—ã–ø–æ–ª–Ω—è–µ—Ç—Å—è –ø–æ—à–∞–≥–æ–≤–æ. –û–¥–∏–Ω —Ç–∞–∫—Ç –ø—Ä–æ—Ü–µ—Å—Å–æ—Ä–∞ - –æ–¥–∏–Ω —à–∞–≥ –ø—Ä–æ–≥—Ä–∞–º–º—ã. –ù–∞–ø—Ä–∏–º–µ—Ä –ø—É—Å—Ç—å –ø–µ—Ä–µ–º–∏–≥–∏–≤–∞–µ—Ç—Å—è –∫—Ä–∞—Å–Ω–∞—è –∏ –∑–µ–ª—ë–Ω–∞—è –ª–∞–º–ø–æ—á–∫–∏, –ø–æ–∫–∞ –ù–ï –Ω–∞–∂–∞—Ç–∞ –∫–Ω–æ–ø–∫–∞. –î–ª–∏—Ç–µ–ª—å–Ω–æ—Å—Ç—å –∫–∞–∂–¥–æ–π –ª–∞–º–ø—ã - 5 —Å–µ–∫—É–Ω–¥. –í–æ—Ç –∞–ª–≥–æ—Ä–∏—Ç–º:
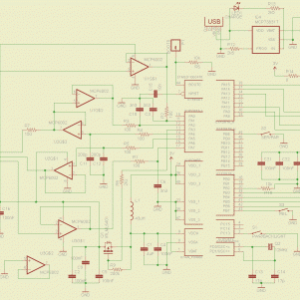
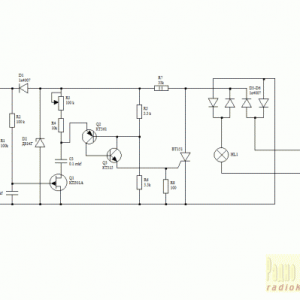
–°–¢–û–ü! –ê –µ—Å–ª–∏ —è –Ω–∞–∂–º—É –∫–Ω–æ–ø–∫—É, –ø–æ–∫–∞ –≥–æ—Ä–∏—Ç –ª–∞–º–ø–æ—á–∫–∞? –¢–æ –Ω–∏—á–µ–≥–æ –Ω–µ –ø—Ä–æ–∏–∑–æ–π–¥—ë—Ç! –ü–æ—Ç–æ–º—É —á—Ç–æ –ø—Ä–æ–≥—Ä–∞–º–º–∞ –≤—ã–ø–æ–ª–Ω—è–µ—Ç—Å—è –ø–æ—à–∞–≥–æ–≤–æ, –∞ —à–∞–≥ —Å –ø—Ä–æ–≤–µ—Ä–∫–æ–π –Ω–∞–∂–∞—Ç–∏—è –∫–Ω–æ–ø–∫–∏ –Ω–∞—Ö–æ–¥–∏—Ç—Å—è –≤ –º–æ–º–µ–Ω—Ç –ø–µ—Ä–µ–∫–ª—é—á–µ–Ω–∏—è –ª–∞–º–ø–æ—á–µ–∫. –ü—Ä–µ—Ä—ã–≤–∞–Ω–∏—è –¥–∞—é—Ç –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç—å –ø—Ä–µ—Ä–≤–∞—Ç—å –≤—ã–ø–æ–ª–Ω–µ–Ω–∏–µ –æ—Å–Ω–æ–≤–Ω–æ–π –ø—Ä–æ–≥—Ä–∞–º–º—ã. –°–¥–µ–ª–∞—Ç—å —ç—Ç–æ –º–æ–∂–Ω–æ –∏–ª–∏ –≤–Ω–µ—à–Ω–∏–º —Å–æ–±—ã—Ç–∏–µ–º (–Ω–∞–∂–∞—Ç–∏–µ –∫–Ω–æ–ø–∫–∏, –æ—Ç–ø—É—Å–∫–∞–Ω–∏–µ –∫–Ω–æ–ø–∫–∏ –ø—Ä–∏—ë–º –¥–∞–Ω–Ω—ã—Ö –∏ –ø—Ä.) –∏–ª–∏ –≤–Ω—É—Ç—Ä–µ–Ω–Ω–∏–º (–ø–æ —Ç–∞–π–º–µ—Ä—É –∏–ª–∏ –ø—Ä–∏—à–ª–æ –≤—Ä–µ–º—è –∫–æ—Ä–º–∏—Ç—å –∫–æ—Ç–∞ –Ω–∞–ø—Ä–∏–º–µ—Ä). –ö–æ–≥–¥–∞ –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç —ç—Ç–æ —Å–∞–º–æ–µ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–µ, —Ç–æ –Ω–∞—á–∏–Ω–∞–µ—Ç –≤—ã–ø–æ–ª–Ω—è—Ç—å—Å—è –ø–æ–¥–ø—Ä–æ–≥—Ä–∞–º–º–∞. –ü–æ–¥–ø—Ä–æ–≥—Ä–∞–º–º—ã –º–æ–≥—É—Ç –±—ã—Ç—å —Ä–∞–∑–Ω—ã–µ –¥–ª—è —Ä–∞–∑–Ω—ã—Ö –≤–∏–¥–æ–≤ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–π, —ç—Ç–∏ –ø–æ–¥–ø—Ä–æ–≥—Ä–∞–º–º—ã –Ω–∞–∑—ã–≤–∞—é—Ç—Å—è –æ–±—Ä–∞–±–æ—Ç—á–∏–∫–∏ –ø—Ä–µ—Ä—ã–≤–Ω–∏—è. –ö–æ–≥–¥–∞ —ç—Ç–æ—Ç —Å–∞–º—ã–π –æ–±—Ä–∞–±–æ—Ç—á–∏–∫ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è –∑–∞–∫–æ–Ω—á–∏—Ç —Å–≤–æ—é —Ä–∞–±–æ—Ç—É, –æ—Å–Ω–æ–≤–Ω–∞—è –ø—Ä–æ–≥—Ä–∞–º–º–∞ –Ω–∞—á–∏–Ω–∞–µ—Ç –≤—ã–ø–æ–ª–Ω—è—Ç—å—Å—è —Å —Ç–æ–≥–æ –º–µ—Å—Ç–∞, –≥–¥–µ –±—ã–ª–∞ –ø—Ä–µ—Ä–≤–∞–Ω–∞. –í—Å—Ç–∞—ë–º –Ω–∞ –ª–∞–ø—ã! –ù—É, –∫–æ—Ç—è—Ç–∞, –ø–æ—Ä–∞ –≤—Å—Ç–∞–≤–∞—Ç—å –Ω–∞ –ª–∞–ø—ã! –ù–∞–¥–µ—é—Å—å —É –í–∞—Å —É–∂–µ –µ—Å—Ç—å –æ—Ç–ª–∞–¥–æ—á–Ω–∞—è –ø–ª–∞—Ç–∞? –ò–ª–∏ —Ö–æ—Ç—è –±—ã –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä? –ù–∞–¥–µ—é—Å—å –µ—Å—Ç—å :) –ê –µ—Å–ª–∏ –Ω–µ—Ç, —Ç–æ –±–µ–∂–∏–º –≤ –º–∞–≥–∞–∑–∏–Ω! (–∏ –∂–µ–ª–∞—Ç–µ–ª—å–Ω–æ –Ω–µ –∑–∞ –∫–æ–ª–±–∞—Å–æ–π. —Ö–æ—Ç—è...) –ö–∞–∫–æ–µ –∂–µ —ç—Ç–æ —É—á–µ–Ω–∏–µ –±–µ–∑ –ø—Ä–∞–∫—Ç–∏–∫–∏? –û—Ç–ª–∏—á–Ω–æ –Ω–∞ –ø–µ—Ä–≤—ã—Ö –ø–æ—Ä–∞—Ö –∏–º–µ—Ç—å –æ—Ç–ª–∞–¥–æ—á–Ω—É—é –ø–ª–∞—Ç—É, –Ω–∞–ø—Ä–∏–º–µ—Ä STM32VL-Discovery, –Ω–æ –µ—Å–ª–∏ –∂–∞–±–∞ –¥—É—à–∏—Ç –∏–ª–∏ –≤—Å—ë-—Ç–∞–∫–∏ –Ω–µ—Ö–≤–∞—Ç–∞–µ—Ç –Ω–∞ –∫–æ–ª–±–∞—Å—É, —Ç–æ –º–æ–∂–Ω–æ –æ–±–æ–π—Ç–∏—Å—å –∏ –æ–¥–Ω–∏–º –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–æ–º –∏ –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª–µ–º –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å–æ–≤ RS-232 ->UART (–Ω–∞–ø—Ä. MAX3232) –∏–ª–∏ USB ->UART (–Ω–∞–ø—Ä. FT232RL). –í —ç—Ç–æ–º —Å–ª—É—á–∞–µ –≤ 100 —Ä—É–±–ª–µ–π –º–æ–∂–Ω–æ –≤–ø–æ–ª–Ω–µ —É–ª–æ–∂–∏—Ç—å—Å—è, –Ω–æ –ø—Ä–∏–¥—ë—Ç—Å—è –¥–µ–ª–∞—Ç—å –ø–µ—á–∞—Ç–Ω—É—é –ø–ª–∞—Ç—É –∏ –ø–∞—è—Ç—å –º–∏–Ω–∏–º—É–º 48 –≤—ã–≤–æ–¥–æ–≤ —à–∏—Ä–∏–Ω–æ–π 0,3 –º–º —Å –∑–∞–∑–æ—Ä–æ–º 0,2 –º–º. –Ø –ø—Ä–µ–¥—É–ø—Ä–µ–∂–¥–∞–ª. –°–Ω–∞—á–∞–ª–∞ –Ω—É–∂–Ω–æ –µ—Å—Ç–µ—Å—Ç–≤–µ–Ω–Ω–æ –ø—Ä–∏–∫–æ—à–∞—á–∏—Ç—å –æ—Ç–ª–∞–¥–æ—á–Ω—É—é –ø–ª–∞—Ç—É –∏–ª–∏ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –∫ –∫–æ–º–ø—å—é—Ç–µ—Ä—É. –ï—Å–ª–∏ —É –í–∞—Å –æ—Ç–ª–∞–¥–æ—á–Ω–∞—è –ø–ª–∞—Ç–∞: –° –æ—Ç–ª–∞–¥–æ—á–Ω–æ–π –ø–ª–∞—Ç–æ–π, –∫–æ–Ω–µ—á–Ω–æ –ø—Ä–æ—â–µ. –ë–µ—Ä—ë–º —à–Ω—É—Ä–æ–∫ Mini-USB –∏ —Å–æ–µ–¥–∏–Ω—è–µ–º –ø–ª–∞—Ç—É —Å –∫–æ–º–ø—å—é—Ç–µ—Ä–æ–º, –≤—Å–µ –¥—Ä–∞–π–≤–µ—Ä—ã –¥–æ–ª–∂–Ω—ã –ø–æ—Å—Ç–∞–≤–∏—Ç—å—Å—è –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∏. –£–≤–∏–¥–µ—Ç—å STMicroelectronics STLink dongle –≤ –¥–∏—Å–ø–µ—Ç—á–µ—Ä–µ —É—Å—Ç—Ä–æ–π—Å—Ç–≤ - —Ö–æ—Ä–æ—à–∏–π –∑–Ω–∞–∫! –ù—É –∞ –µ—Å–ª–∏ —á—Ç–æ-—Ç–æ –ø–æ—à–ª–æ –Ω–µ —Ç–∞–∫ –∏ –Ω–∏—á–µ–≥–æ –Ω–µ –≤—ã—à–ª–æ - –Ω–µ –Ω–∞–¥–æ —Ü–∞—Ä–∞–ø–∞—Ç—å –¥–∏–≤–∞–Ω, –Ω—É–∂–Ω–æ –ø—Ä–æ—Å—Ç–æ –∑–∞–π—Ç–∏ —Å—é–¥–∞ –∏ —É—Å—Ç–∞–Ω–æ–≤–∏—Ç—å STM32 ST-LINK utility. –ù—É –∞ –µ—Å–ª–∏ –í—ã —Å—á–∞—Å—Ç–ª–∏–≤—ã–π –æ–±–ª–∞–¥–∞—Ç–µ–ª—å –∫–æ–º–ø—å—é—Ç–µ—Ä–∞ –ø–æ–¥ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ–º Windows 8, —Ç–æ –ø–µ—Ä–µ–¥ –ø—Ä–æ–≤–µ–¥–µ–Ω–∏–µ–º –≤—ã—à–µ–æ–ø–∏—Å–∞–Ω–Ω—ã—Ö –¥–µ–π—Å—Ç–≤–∏–π –Ω—É–∂–Ω–æ —Å–¥–µ–ª–∞—Ç—å —Ç–∞–∫: –ü–∞—Ä–∞–º–µ—Ç—Ä—ã -> –ò–∑–º–µ–Ω–µ–Ω–∏–µ –ø–∞—Ä–∞–º–µ—Ç—Ä–æ–≤ –∫–æ–º–ø—å—é—Ç–µ—Ä–∞ -> –û–±—â–∏–µ -> –û—Å–æ–±—ã–µ –≤–∞—Ä–∏–∞–Ω—Ç—ã –∑–∞–≥—Ä—É–∑–∫–∏ –∏ –≤—ã–±—Ä–∞—Ç—å –ø–∞—Ä–∞–º–µ—Ç—Ä –û—Ç–∫–ª—é—á–µ–Ω–∏–µ –ø—Ä–æ–≤–µ—Ä–∫–∏ –ø–æ–¥–ø–∏—Å–∏ –¥—Ä–∞–π–≤–µ—Ä–æ–≤. –ï—Å–ª–∏ —É –í–∞—Å –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä: –ï—Å–ª–∏ —É –í–∞—Å –æ–¥–∏–Ω –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä, —Ç–æ —É –í–∞—Å –¥–æ–ª–∂–Ω—ã –±—ã—Ç—å –ø—Ä—è–º—ã–µ –ª–∞–ø—ã. –ù–æ —è –≤ –í–∞—Å –Ω–µ —Å–æ–º–Ω–µ–≤–∞—é—Å—å! –ü–µ—Ä–µ–¥ –ø–æ–¥–∫–ª—é—á–µ–Ω–∏–µ–º –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞ –∫ –∫–æ–º–ø—å—é—Ç–µ—Ä—É –µ–≥–æ –Ω—É–∂–Ω–æ –ø—Ä–∏–ø–∞—è—Ç—å –∫ –ø–µ—á–∞—Ç–Ω–æ–π –ø–ª–∞—Ç–µ. –î–ª—è —ç—Ç–æ–≥–æ –∫—Ä–æ–º–µ –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞ –∏ –ø—Ä—è–º—ã—Ö –ª–∞–ø –Ω—É–∂–Ω–∞ –∫–∞–∫ –º–∏–Ω–∏–º—É–º –ø–µ—á–∞—Ç–Ω–∞—è –ø–ª–∞—Ç–∞. –ê —Ç—É—Ç —É–∂ –í–∞—à–µ —Ç–≤–æ—Ä—á–µ—Å—Ç–≤–æ. –Ý–∞–±–æ—á–∏–π –º–∏–Ω–∏–º—É–º –Ω–∞ —Å—Ö–µ–º–µ –Ω–∏–∂–µ: –ù–æ —ç—Ç–æ –Ω–µ–∏–Ω—Ç–µ—Ä–µ—Å–Ω—ã–π –º–∏–Ω–∏–º—É–º. –î–æ–±–∞–≤—å—Ç–µ —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–≤ –∏ –∫–Ω–æ–ø–æ–∫ (–Ω–µ –∑–∞–±—É–¥—å—Ç–µ –ø—Ä–æ –≤—ã–≤–æ–¥—ã BOOT), –Ω–∞–ø—Ä–∏–º–µ—Ä —Ç–∞–∫ –ê –≤–æ—Ç —Å –ø–∞–π–∫–æ–π —ç—Ç–æ–π –±–ª–æ—Ö–∏ –º–æ–≥—É—Ç –≤–æ–∑–Ω–∏–∫–Ω—É—Ç—å –ø—Ä–æ–±–ª–µ–º—ã. –ù–æ —è –Ω–∞–¥–µ—é—Å—å, –Ω–µ –≤–æ–∑–Ω–∏–∫–Ω—É—Ç. –Ø –Ω–∞–∫–æ—à–∞—á–∏–ª—Å—è –ø–∞—è—Ç—å –µ—ë —Å–≤–æ–∏–º –ª—é–±–∏–º—ã–º —Å–æ–≤–µ—Ç—Å–∫–∏–º 25 –í—Ç –ø–∞—è–ª—å–Ω–∏–∫–æ–º —Å —à–∏—Ä–∏–Ω–æ–π –∂–∞–ª–∞ –≤ 3/4 —à–∏—Ä–∏–Ω—ã –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞. –£ –º–µ–Ω—è –±–æ–ª—å—à–µ –ø—Ä–æ–±–ª–µ–º —Å –∏–∑–≥–æ—Ç–æ–≤–ª–µ–Ω–∏–µ–º –ø–µ—á–∞—Ç–Ω–æ–π –ø–ª–∞—Ç—ã... –Ω—É —Ç—É—Ç —É–∂ —É –∫–∞–∂–¥–æ–≥–æ —Å–≤–æ—è —Ç–µ—Ö–Ω–æ–ª–æ–≥–∏—è. –ò –ø–µ—Ä–µ—Ö–æ–¥–Ω–∏–∫ –Ω—É–∂–Ω–æ —Å–¥–µ–ª–∞—Ç—å –Ω–∞ UART –ø–æ –¥–æ–∫—É–º–µ–Ω—Ç–∞—Ü–∏–∏ –∫ —Ç–æ–π –º–∏–∫—Ä–æ—Å—Ö–µ–º–µ, –∫–æ—Ç–æ—Ä—É—é –∫—É–ø–∏–ª–∏. –°–æ–µ–¥–∏–Ω—è–µ–º –≤—ã–≤–æ–¥—ã TxD –∏ RxD –Ω–∞ –ø–µ—á–∞—Ç–Ω–æ–π –ø–ª–∞—Ç–µ —Å –≤—ã–≤–æ–¥–∞–º–∏ RxD –∏ TxD —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–µ–Ω–Ω–æ –ø–µ—Ä–µ—Ö–æ–¥–Ω–∏–∫–∞. –ù–µ –∑–∞–±—ã–≤–∞–µ–º –ø—Ä–æ –æ–±—â—É—é —Ç–æ—á–∫—É –∏ –ø–∏—Ç–∞–Ω–∏–µ –≤—Å–µ–≥–æ —ç—Ç–æ–≥–æ.
–ù—É –≤–æ—Ç, —Ç–æ–≤–∞—Ä–∏—â–∏, –∏ –ø—Ä–∏–∫–æ—à–∞—á–∏–ª–∏. –î–∞–ª—å—à–µ –±—É–¥–µ–º –ø–æ–≤–µ–ª–µ–≤–∞—Ç—å —ç—Ç–æ–π —à–∞–π—Ç–∞–Ω-–º–∞—à–∏–Ω–æ–π :) –í—ã–±–æ—Ä –∏ —É—Å—Ç–∞–Ω–æ–≤–∫–∞ –ü–û –ü–æ–ª—å–∑–æ–≤–∞—Ç—å—Å—è –º—ã –±—É–¥–µ–º —Å—Ä–µ–¥–æ–π —Ä–∞–∑—Ä–∞–±–æ—Ç–∫–∏ CooCox IDE, –Ω–æ —ç—Ç–æ –Ω–µ –ø—Ä–æ—Å—Ç–æ —Ç–∞–∫, –∞ –ø–æ –Ω–µ—Å–∫–æ–ª—å–∫–∏–º –ø—Ä–∏—á–∏–Ω–∞–º:
–°—Ä–µ–¥–∞ —Ä–∞–∑—Ä–∞–±–æ—Ç–∫–∏ - —ç—Ç–æ –ø—Ä–æ–≥—Ä–∞–º–º–∞ –¥–ª—è –Ω–∞–ø–∏—Å–∞–Ω–∏—è –∫–æ–¥–∞, –∫–æ–º–ø–∏–ª—è—Ç–æ—Ä, –æ—Ç–ª–∞–¥—á–∏–∫ –≤ –æ–¥–Ω–æ–º. –£–¥–æ–±–Ω–µ–Ω—å–∫–æ :) –ù–æ –µ—Å–ª–∏ –∫–∞–∫–æ–º—É-—Ç–æ —Å—É—Ä–æ–≤–æ–º—É –ß–µ–ª—è–±–∏–Ω—Å–∫–æ–º—É –∫–æ—Ç—É —É–¥–æ–±–Ω–µ–µ –ø–∏—Å–∞—Ç—å –∫–æ–¥ (–≤ –±–ª–æ–∫–Ω–æ—Ç–µ –Ω–∞–ø—Ä–∏–º–µ—Ä), –∫–æ–º–ø–∏–ª–∏—Ä–æ–≤–∞—Ç—å –∏ –ø—Ä–æ—à–∏–≤–∞—Ç—å —Ä–∞–∑–Ω—ã–º–∏ –ø—Ä–æ–≥—Ä–∞–º–º–∞–º–∏ - —è –Ω–µ –ø—Ä–æ—Ç–∏–≤, —Ç–æ–≥–¥–∞ –í–∞–º –ø—Ä–∏–≥–æ–¥–∏—Ç—Å—è STM32 ST-LINK utilit –¥–ª—è –∑–∞–≥—Ä—É–∑–∫–∏ –ø—Ä–æ—à–∏–≤–∫–∏ –≤ –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä. –•–æ–∑—è–∏–Ω –±–∞—Ä–∏–Ω, –∫–∞–∫ –≥–æ–≤–æ—Ä–∏—Ç—Å—è. –≠—Ç–∞ —Å—Ä–µ–¥–∞ —Ä–∞–∑—Ä–∞–±–æ—Ç–∫–∏ –æ—Å–Ω–æ–≤–∞–Ω–∞ –Ω–∞ –º–Ω–æ–≥–∏–º –∏–∑–≤–µ—Å—Ç–Ω–æ–º Eclipse. –ò—Ç–∞–∫:
–ï—Å–ª–∏ —É –í–∞—Å –≤–∞—Ä–∏–∞–Ω—Ç –±–µ–∑ –æ—Ç–ª–∞–¥–æ—á–Ω–æ–π –ø–ª–∞—Ç—ã/–ø—Ä–æ–≥—Ä–∞–º–º–∞—Ç–æ—Ä–∞, —Ç–æ –¥–ª—è –∑–∞–≥—Ä—É–∑–∫–∏ –ø—Ä–æ–≥—Ä–∞–º–º—ã –≤ –ú–ö –ø–æ–Ω–∞–¥–æ–±–∏—Ç—Å—è –ø—Ä–æ–≥—Ä–∞–º–º–∫–∞ Flash Loader Demonstrator –∫–æ—Ç–æ—Ä–∞—è –Ω–∞—Ö–æ–¥–∏—Ç—Å—è –∑–¥–µ—Å—å –ù–∞—Ö–æ–¥–∏–º –æ–±—â–∏–π —è–∑—ã–∫ –ü–µ—Ä–µ–¥ —Ç–µ–º, –∫–∞–∫ –ø–∏—Å–∞—Ç—å —Å–≤–æ—é –ø–µ—Ä–≤—É—é –ø—Ä–æ–≥—Ä–∞–º–º—É –Ω—É–∂–Ω–æ –Ω–∞–π—Ç–∏ —Å –ú–ö –æ–±—â–∏–π —è–∑—ã–∫. –í—Ä—è–¥ –ª–∏ –æ–Ω –±—É–¥–µ—Ç —É—á–∏—Ç—å –Ω–∞—à —è–∑—ã–∫, –ø–æ —ç—Ç–æ–º—É –ø—Ä–∏–¥–µ—Ç—Å—è –≤—ã—É—á–∏—Ç—å (–∞ –º–æ–∂–µ—Ç –ø—Ä–æ—Å—Ç–æ –≤—Å–ø–æ–º–Ω–∏—Ç—å) —è–∑—ã–∫ –Ω–∞ –∫–æ—Ç–æ—Ä–æ–º –º—ã –±—É–¥–µ–º –æ–±—â–∞—Ç—å—Å—è —Å –ú–ö, —ç—Ç–æ –°–∏. –ü–æ–Ω–∞–¥–æ–±—è—Ç—Å—è –Ω–∞–º —Ç–æ–ª—å–∫–æ –æ—Å–Ω–æ–≤—ã (—Å–æ—Å—Ç–∞–≤ –ø—Ä–æ–≥—Ä–∞–º–º—ã, —Ñ—É–Ω–∫—Ü–∏–∏, –æ–ø–µ—Ä–∞—Ç–æ—Ä—ã). –ï—Å–ª–∏ —è–∑—ã–∫ —ç—Ç–æ—Ç –∑–Ω–∞–µ—Ç–µ, —Ç–æ –º–æ–∂–µ—Ç–µ —Å—Ä–∞–∑—É –ø–µ—Ä–µ–π—Ç–∏ –∫ –ø—É–Ω–∫—Ç—É «–ü–µ—Ä–≤–∞—è –ø—Ä–æ–≥—Ä–∞–º–º–∞», –Ω—É –∞ –Ω–µ–∑–Ω–∞—é—â–∏—Ö —è –≤–≤–µ–¥—É –≤ –∫—É—Ä—Å –¥–µ–ª–∞. –ü—Ä–æ–µ–∫—Ç —Å–æ—Å—Ç–æ–∏—Ç –∏–∑ —Ñ–∞–π–ª–æ–≤ —Å —Ä–∞—Å—à–∏—Ä–µ–Ω–∏—è–º–∏ .c –∏ .h. –í –ø–µ—Ä–≤—ã—Ö –Ω–∞—Ö–æ–¥—è—Ç—Å—è —Ñ—É–Ω–∫—Ü–∏–∏ –≤–æ –≤—Ç–æ—Ä—ã—Ö –Ω–∞–∑–≤–∞–Ω–∏—è –∏—Å–ø–æ–ª—å–∑—É–µ–º—ã—Ö —Ñ—É–Ω–∫—Ü–∏–π –∏ –∫–æ–Ω—Å—Ç–∞–Ω—Ç—ã –Ω–∞–ø—Ä–∏–º–µ—Ä. –¢–∞–∫ —É–∂ –∑–∞–≤–µ–¥–µ–Ω–æ. –°–∞–º—ã–π –≥–ª–∞–≤–Ω—ã–π —Ñ–∞–π–ª, –≤ –∫–æ—Ç–æ—Ä–æ–º –Ω–∞—Ö–æ–¥–∏—Ç—Å—è –∫–æ–¥ –ø—Ä–æ–≥—Ä–∞–º–º—ã main.c. –î–ª—è –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏—è —Ä–∞–∑–ª–∏—á–Ω—ã—Ö —Ñ—É–Ω–∫—Ü–∏–π –Ω—É–∂–Ω–æ –ø–æ–¥–∫–ª—é—á–∞—Ç—å –±–∏–±–ª–∏–æ—Ç–µ–∫–∏ —Å —ç—Ç–∏–º–∏ —Ñ—É–Ω–∫—Ü–∏—è–º–∏. –ü–æ–¥–∫–ª—é—á–∞—é—Ç—Å—è –æ–Ω–∏ –∑–∞–ø–∏—Å—å—é #include "–Ω–∞–∑–≤–∞–Ω–∏–µ_–±–∏–±–ª–∏–æ—Ç–µ–∫–∏" –Ω—É –±–∏–±–ª–∏–æ—Ç–µ–∫–∏ –µ—Å—Ç–µ—Å—Ç–≤–µ–Ω–Ω–æ –¥–æ–ª–∂–Ω—ã –±—ã—Ç—å –≤ –ø—Ä–æ–µ–∫—Ç–µ. –ü–æ–¥–∫–ª—é—á–∞—é—Ç –∏—Ö –≤ —Å–∞–º–æ–º –Ω–∞—á–∞–ª–µ —Ñ–∞–π–ª–∞. –§—É–Ω–∫—Ü–∏–∏ - —ç—Ç–æ —Å–≤–æ–µ–æ–±—Ä–∞–∑–Ω–∞—è —á–∞—Å—Ç—å –ø—Ä–æ–≥—Ä–∞–º–º—ã. –í–æ–æ–±—â–µ –ø—Ä–æ–≥—Ä–∞–º–º–∞ —Å–æ—Å—Ç–æ–∏—Ç –∏–∑ –æ–¥–Ω–æ–π –∏–ª–∏ –Ω–µ—Å–∫–æ–ª—å–∫–∏—Ö —Ñ—É–Ω–∫—Ü–∏–π. –§—É–Ω–∫—Ü–∏—è –∏–º–µ–µ—Ç –≤–∏–¥: —Ç–∏–ø_–≤–æ–∑–≤—Ä–∞—â–∞–µ–º–æ–π_–ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π –∏–º—è_—Ñ—É–Ω–∫—Ü–∏–∏ (—Ç–∏–ø_–ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π) –í —Ñ—É–Ω–∫—Ü–∏—é –º–æ–∂–Ω–æ –æ—Ç–ø—Ä–∞–≤–∏—Ç—å –∫–∞–∫—É—é-–Ω–∏–±—É–¥—å –ø–µ—Ä–µ–º–µ–Ω–Ω—É—é, —Ñ—É–Ω—Ü–∏—è –µ—ë –æ–±—Ä–∞–±–æ—Ç–∞–µ—Ç –∏ –≤–µ—Ä–Ω—ë—Ç –∫–∞–∫–æ–µ-–Ω–∏–±—É–¥—å –∑–Ω–∞—á–µ–Ω–∏–µ. –û—á–µ–Ω—å —É–¥–æ–±–Ω–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å —Ñ—É–Ω–∫—Ü–∏—é –¥–ª—è –ø–æ–≤—Ç–æ—Ä—è—é—â–∏—Ö—Å—è –¥–µ–π—Å—Ç–≤–∏–π, —á–µ–º –ø–∏—Å–∞—Ç—å –ø–æ—Å—Ç–æ—è–Ω–Ω–æ –æ–¥–∏–Ω –∏ —Ç–æ—Ç –∂–µ –∫—É—Å–æ–∫ –∫–æ–¥–∞, –º–æ–∂–Ω–æ –ø—Ä–æ—Å—Ç–æ –æ—Ç–ø—Ä–∞–≤–ª—è—Ç—å –ø–µ—Ä–µ–º–µ–Ω–Ω—É—é –≤ —Ñ—É–Ω–∫—Ü–∏—é –∏ –ø–æ–ª—É—á–∞—Ç—å –æ–±—Ä–∞—Ç–Ω–æ –æ–±—Ä–∞–±–æ—Ç–∞–Ω–Ω–æ–µ –∑–Ω–∞—á–µ–Ω–∏–µ. –ü–µ—Ä–µ–¥ —Ç–µ–º, –∫–∞–∫ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å —Ñ—É–Ω–∫—Ü–∏—é, –µ—ë –Ω—É–∂–Ω–æ –æ–±—ä—è–≤–∏—Ç—å –≤ —Å–∞–º–æ–º –Ω–∞—á–∞–ª–µ —Ñ–∞–π–ª–∞. –î–µ–ª–∞—é—Ç —ç—Ç–æ –≤ —Ç–∞–∫–æ–º –≤–∏–¥–µ: —Ç–∏–ø_–≤–æ–∑–≤—Ä–∞—â–∞–µ–º–æ–π_–ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π –∏–º—è_—Ñ—É–Ω–∫—Ü–∏–∏ (—Ç–∏–ø_–ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π); –ê—Ö, –¥–∞, –∑–∞–±—ã–ª —Å–∞–º–æ–µ –≥–ª–∞–≤–Ω–æ–µ! –í –∫–æ–Ω—Ü–µ –∫–∞–∂–¥–æ–π —Å—Ç—Ä–æ–∫–∏ –¥–æ–ª–∂–Ω–∞ –±—ã—Ç—å —Ç–æ—á–∫–∞ —Å –∑–∞–ø—è—Ç–æ–π! –ï—Å–ª–∏ —Ñ—É–Ω–∫—Ü–∏—è –Ω–∏—á–µ–≥–æ –Ω–µ –≤–æ–∑–≤—Ä–∞—â–∞–µ—Ç (–Ω–∞–ø—Ä–∏–º–µ—Ä –≤—Ä–µ–º–µ–Ω–Ω–∞—è –∑–∞–¥–µ—Ä–∂–∫–∞, –æ–Ω–∞ –ø—Ä–æ—Å—Ç–æ —Ç—è–Ω–µ—Ç –∫–æ—Ç–∞ –∑–∞ —Ö–≤–æ—Å—Ç –≤—Ä–µ–º—è), —Ç–æ —Ç–∏–ø —É–∫–∞–∑—ã–≤–∞—é—Ç void. –ü—Ä–∏ –∑–∞–ø—É—Å–∫–µ, –ø–µ—Ä–≤–æ–π –≤—Å–µ–≥–¥–∞ –≤—ã–ø–æ–ª–Ω—è–µ—Ç—Å—è —Ñ—É–Ω–∫—Ü–∏—è main(). –ù—É —Å —Ñ—É–Ω–∫—Ü–∏—è–º–∏ –≤—Ä–æ–¥–µ —Ä–∞–∑–æ–±—Ä–∞–ª–∏—Å—å, –ø–æ–Ω–∏–º–∞–Ω–∏–µ –ø—Ä–∏–¥—ë—Ç —Ç–æ–ª—å–∫–æ —Å –ø—Ä–∞–∫—Ç–∏–∫–æ–π. –í—ã—à–µ —è —É–ø–æ–º–∏–Ω–∞–ª —Ç–∏–ø –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π. –í—Å–µ –ø–µ—Ä–µ–º–µ–Ω–Ω—ã–µ –º–æ–≥—É—Ç –±—ã—Ç—å —Ä–∞–∑–Ω—ã—Ö —Ç–∏–ø–æ–≤, –≤–æ—Ç –æ—Å–Ω–æ–≤–Ω—ã–µ:
–°—Ç—Ä–æ–∫—É (—Å–ª–æ–≤–æ, –ø—Ä–µ–¥–ª–æ–∂–µ–Ω–∏–µ) –º–æ–∂–Ω–æ –ø—Ä–µ–¥—Å—Ç–∞–≤–∏—Ç—å –∫–∞–∫ –º–∞—Å—Å–∏–≤ –∏–∑ —Å–∏–º–≤–æ–ª–æ–≤ —Ç–∏–ø–∞ char. –ù–∞–ø—Ä–∏–º–µ—Ä: char stroka[5] = "–°–ª–æ–≤–æ"; –ó–¥–µ—Å—å –∫–≤–∞–¥—Ä–∞—Ç–Ω—ã—Ö —Å–∫–æ–±–∫–∞—Ö - –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ —Å–∏–º–≤–æ–ª–æ–≤ –≤ —Å—Ç—Ä–æ–∫–µ, «stroka» - –Ω–∞–∑–≤–∞–Ω–∏–µ –º–∞—Å—Å–∏–≤–∞. –ü–µ—Ä–µ–¥ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏–µ–º –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π –µ—ë –Ω—É–∂–Ω–æ –æ–±—è–∑–∞—Ç–µ–ª—å–Ω–æ –æ–±—ä—è–≤–∏—Ç—å. (–ø—Ä–æ—Å—Ç–æ —É–∫–∞–∑–∞—Ç—å —Ç–∏–ø –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π –∏ –∏–º—è) –î–∞–ª—å—à–µ –ø–æ –ø–ª–∞–Ω—É –æ–ø–µ—Ä–∞—Ç–æ—Ä—ã. –û–ø–µ—Ä–∞—Ç–æ—Ä—ã - —Å–∏–º–≤–æ–ª—ã –ø—Ä–∏ –ø–æ–º–æ—â–∏ –∫–æ—Ç–æ—Ä—ã—Ö –ø—Ä–æ–∏–∑–≤–æ–¥—è—Ç—Å—è –∫–∞–∫–∏–µ –ª–∏–±–æ –æ–ø–µ—Ä–∞—Ü–∏–∏ –Ω–∞–¥ –ø–µ—Ä–µ–º–µ–Ω–Ω—ã–º–∏.
–ù–∞–ø—Ä–∏–º–µ—Ä –≤—ã—Ä–∞–∂–µ–Ω–∏–µ a=b+c –∑–Ω–∞—á–∏—Ç –ø—Ä–∏—Å–≤–æ–∏—Ç—å –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π a –∑–Ω–∞—á–µ–Ω–∏–µ —Å—É–º–º—ã –∑–Ω–∞—á–µ–Ω–∏–π –ø–µ—Ä–µ–º–µ–Ω–Ω—ã—Ö b –∏ c.
–ù–∞–ø—Ä–∏–º–µ—Ä –≤—ã—Ä–∞–∂–µ–Ω–∏–µ a++ –∑–Ω–∞—á–∏—Ç —É–≤–µ–ª–∏—á–∏—Ç—å –∑–Ω–∞—á–µ–Ω–∏–µ –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π a –Ω–∞ 1 (—Ç–æ –∂–µ —Å–∞–º–æ–µ, —á—Ç–æ –∏ a=a+1)
–ù–∞–ø—Ä–∏–º–µ—Ä –≤—ã—Ä–∞–∂–µ–Ω–∏–µ a<b —Å—Ç–∞–Ω–æ–≤–∏—Ç—Å—è –∏—Å—Ç–∏–Ω–Ω—ã–º, –µ—Å–ª–∏ –∑–Ω–∞—á–µ–Ω–∏–µ –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π a –º–µ–Ω—å—à–µ –∑–Ω–∞—á–µ–Ω–∏—è –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π b –∏ –ª–æ–∂–Ω—ã–º, –µ—Å–ª–∏ –∑–Ω–∞—á–µ–Ω–∏—è —Ä–∞–≤–Ω—ã –∏–ª–∏ a –±–æ–ª—å—à–µ b. –í—ã—Ä–∞–∂–µ–Ω–∏–µ a==b –∏—Å—Ç–∏–Ω–Ω–æ –µ—Å–ª–∏ a —Ä–∞–≤–Ω–æ b –∏ –ª–æ–∂–Ω–æ, –µ—Å–ª–∏ a –Ω–µ —Ä–∞–≤–Ω–æ b, –ù–û –≤—ã—Ä–∞–∂–µ–Ω–∏–µ a=b –∏—Å—Ç–∏–Ω–Ω–æ –≤—Å–µ–≥–¥–∞, –ø–æ—Ç–æ–º—É —á—Ç–æ —ç—Ç–æ –Ω–µ —Å—Ä–∞–≤–Ω–µ–Ω–∏–µ, —ç—Ç–æ –ø—Ä–∏—Å–≤–æ–µ–Ω–∏–µ –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π a –∑–Ω–∞—á–µ–Ω–∏—è –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π b.
–ù–∞–ø—Ä–∏–º–µ—Ä –µ—Å–ª–∏ a=5, b=3, —Ç–æ –∑–Ω–∞—á–µ–Ω–∏–µ –≤—ã—Ä–∞–∂–µ–Ω–∏—è a%b –±—É–¥–µ—Ç —Ä–∞–≤–Ω–æ 2 (—Ç.–∫. 5/3=1 (–æ—Å—Ç.2))
–ß—É—Ç—å –Ω–µ –∑–∞–±—ã–ª —Ä–∞—Å—Å–∫–∞–∑–∞—Ç—å –ø—Ä–æ —Ü–∏–∫–ª—ã. –û—Å–Ω–æ–≤–Ω—ã–µ: while(—É—Å–ª–æ–≤–∏–µ) { —Ç–µ–ª–æ —Ü–∏–∫–ª–∞ } –¢–µ–ª–æ —Ü–∏–∫–ª–∞ (–≤—Å—ë —á—Ç–æ –≤ —Ñ–∏–≥—É—Ä–Ω—ã—Ö —Å–∫–æ–±–∫–∞—Ö) –≤—ã–ø–æ–ª–Ω—è–µ—Ç—Å—è, –∫–æ–≥–¥–∞ —É—Å–ª–æ–≤–∏–µ –∏—Å—Ç–∏–Ω–Ω–æ (–ø–æ–∫–∞ —É—Å–ª–æ–≤–∏–µ –Ω–µ —Å—Ç–∞–Ω–µ—Ç –ª–æ–∂–Ω—ã–º).
–î–∞–ª—å—à–µ –∏–¥—ë—Ç —Ü–∏–∫–ª –≤—Å–µ—Ö —Ü–∏–∫–ª–æ–≤. –¶–∏–∫–ª —Å–æ —Å—á–µ—Ç—á–∏–∫–æ–º. –û–Ω –≤—ã–ø–æ–ª–Ω—è–µ—Ç—Å—è –æ–ø—Ä–µ–¥–µ–ª–µ–Ω–Ω–æ–µ –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ —Ä–∞–∑, –≤—ã–≥–ª—è–¥–∏—Ç –æ–Ω —Ç–∞–∫: for (–Ω–∞—á–∞–ª—å–Ω–æ–µ_–∑–Ω–∞—á–µ–Ω–∏–µ; —Ü–∏–∫–ª_–≤—ã–ø–æ–ª–Ω—è–µ—Ç—Å—è_–¥–æ, —à–∞–≥) { —Ç–µ–ª–æ —Ü–∏–∫–ª–∞ { –ù–∞—á–∞–ª—å–Ω–æ–µ_–∑–Ω–∞—á–µ–Ω–∏–µ - –Ω–∞—á–∞–ª—å–Ω–æ–µ –∑–Ω–∞—á–µ–Ω–∏–µ —Å—á—ë—Ç—á–∏–∫–∞ –¶–∏–∫–ª_–≤—ã–ø–æ–ª–Ω—è–µ—Ç—Å—è_–¥–æ - –¥–æ –¥–æ—Å—Ç–∏–∂–µ–Ω–∏—è –∫–∞–∫–æ–≥–æ –∑–Ω–∞—á–µ–Ω–∏—è –≤—ã–ø–æ–ª–Ω—è–µ—Ç—Å—è —Ü–∏–∫–ª –®–∞–≥ - —Å –∫–∞–∫–∏–º —à–∞–≥–æ–º —Å—á–µ—Ç—á–∏–∫ —Å—á–∏—Ç–∞–µ—Ç –ù–∞–ø—Ä–∏–º–µ—Ä for (i=0; i<10, i++) { —Ç–µ–ª–æ —Ü–∏–∫–ª–∞ } –ó–¥–µ—Å—å –Ω–∞—á–∞–ª—å–Ω–æ–µ –∑–Ω–∞—á–µ–Ω–∏–µ –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π i —Ä–∞–≤–Ω–æ 0, —Ü–∏–∫–ª –≤—ã–ø–æ–ª–Ω—è–µ—Ç—Å—è, –ø–æ–∫–∞ –∑–Ω–∞—á–µ–Ω–∏–µ –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π i –º–µ–Ω—å—à–µ 10, –ø—Ä–∏ –∫–∞–∂–¥–æ–º –≤—ã–ø–æ–ª–Ω–µ–Ω–∏–∏ —Ü–∏–∫–ª–∞ –∫ –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π i –ø—Ä–∏–±–∞–≤–ª—è–µ—Ç—Å—è 1. –¢–∞–∫ –∂–µ –º–æ–∂–Ω–æ –∏–∑–º–µ–Ω—è—Ç—å –∑–Ω–∞—á–µ–Ω–∏–µ –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π –ø—Ä—è–º–æ –≤ —Ü–∏–∫–ª–µ. –î–∞–ª—å—à–µ –ø–æ –ø–ª–∞–Ω—É «—É—Å–ª–æ–≤–Ω—ã–π –ø–µ—Ä–µ—Ö–æ–¥»: if (—É—Å–ª–æ–≤–∏–µ){ —Ç–µ–ª–æ 1 } else { —Ç–µ–ª–æ 2 } –í —É—Å–æ–≤–Ω–æ–º –ø–µ—Ä–µ—Ö–æ–¥–µ «—Ç–µ–ª–æ 1» –≤—ã–ø–æ–ª–Ω—è–µ—Ç—Å—è, –µ—Å–ª–∏ —É—Å–ª–æ–≤–∏–µ –∏—Å—Ç–∏–Ω–Ω–æ –∏ –≤—ã–ø–æ–ª–Ω—è–µ—Ç—Å—è «—Ç–µ–ª–æ 2», –µ—Å–ª–∏ —É—Å–ª–æ–≤–∏–µ –ª–æ–∂–Ω–æ. –ï—â—ë –µ—Å—Ç—å —Ç–∞–∫–æ–π –≤–∞—Ä–∏–∞–Ω—Ç: if (—É—Å–ª–æ–≤–∏–µ 1){ —Ç–µ–ª–æ 1 } else if (—É—Å–ª–æ–≤–∏–µ 2) { —Ç–µ–ª–æ 2 } –í —ç—Ç–æ–º —Å–ª—É—á–∞–µ «—Ç–µ–ª–æ 1» –≤—ã–ø–æ–ª–Ω—è–µ—Ç—Å—è, –µ—Å–ª–∏ –∏—Å—Ç–∏–Ω–Ω–æ «—É—Å–ª–æ–≤–∏–µ 1», «—Ç–µ–ª–æ 2» –≤—ã–ø–æ–ª–Ω—è–µ—Ç—Å—è, –µ—Å–ª–∏ –∏—Å—Ç–∏–Ω–Ω–æ «—É—Å–ª–æ–≤–∏–µ 2». –¢–∞–∫–∏—Ö —É—Å–ª–æ–≤–∏–π –º–æ–∂–µ—Ç –±—ã—Ç—å —Å–∫–æ–ª—å–∫–æ —É–≥–æ–¥–Ω–æ, —Ç–∞–∫ –∂–µ –º–æ–∂–µ—Ç –±—ã—Ç—å –æ–¥–Ω–æ else. –£—Å–ª–æ–≤–∏—è –º–æ–≥—É—Ç –±—ã—Ç—å –ø—Ä–æ—Å—Ç—ã–º–∏ –∏ —Å–æ—Å—Ç–∞–≤–Ω—ã–º–∏: –ø—Ä–æ—Å—Ç—ã–µ - –æ–¥–Ω–æ –ª–æ–≥–∏—á–µ—Å–∫–æ–µ –≤—ã—Ä–∞–∂–µ–Ω–∏–µ, –∞ —Å–æ—Å—Ç–∞–≤–Ω–æ–µ - –Ω–µ—Å–∫–æ–ª—å–∫–æ –ª–æ–≥–∏—á–µ—Å–∫–∏—Ö –≤—ã—Ä–∞–∂–µ–Ω–∏–π —Å–æ–µ–¥–∏–Ω—ë–Ω–Ω—ã—Ö –∑–Ω–∞–∫–æ–º & (—É—Å–ª–æ–≤–∏—è –∏—Å—Ç–∏–Ω–Ω–æ, –∫–æ–≥–¥–∞ –≤—Å–µ —É—Å–ª–æ–≤–∏—è —Å–æ–µ–¥–∏–Ω—ë–Ω–Ω—ã–µ —ç—Ç–∏–º –∑–Ω–∞–∫–æ–º –∏—Å—Ç–∏–Ω–Ω—ã) –∏–ª–∏ | (—É—Å–ª–æ–≤–∏–µ –∏—Å—Ç–∏–Ω–Ω–æ, –µ—Å–ª–∏ —Ö–æ—Ç—è–±—ã –æ–¥–Ω–æ —É—Å–ª–æ–≤–∏–µ —Å–æ–µ–¥–∏–Ω—ë–Ω–Ω–æ–µ —ç—Ç–∏–º –∑–Ω–∞–∫–æ–º –∏—Å—Ç–∏–Ω–Ω–æ). –ï—â—ë –ø–æ–ª–µ–∑–Ω–∞—è –≤–µ—â—å - –∫–æ–º–º–µ–Ω—Ç–∞—Ä–∏–∏. –ü–æ–º–æ–≥—É—Ç —Ä–∞–∑–æ–±—Ä–∞—Ç—å—Å—è –≤ –∑–∞–±—ã—Ç–æ–º –ø—Ä–æ–µ–∫—Ç–µ :) –∏–ª–∏ –ø—Ä–æ—Å—Ç–æ —á—Ç–æ –±—ã —á—Ç–æ-—Ç–æ –Ω–µ –∑–∞–±—ã—Ç—å. –ö–æ–º–º–µ–Ω—Ç–∏—Ä–æ–≤–∞—Ç—å –º–æ–∂–Ω–æ –∏–ª–∏ –ø–æ—Å–ª–µ –∑–Ω–∞–∫–æ–≤ // –∏ –¥–æ –∫–æ–Ω—Ü–∞ —Å—Ç—Ä–æ–∫–∏ –∏–ª–∏ –Ω–∞—á–∏–Ω–∞—é—Ç—Å—è –∑–Ω–∞–∫–∞–º–∏ /* –∏ –∑–∞–∫–∞–Ω—á–∏–≤–∞—é—Ç—Å—è */, –≤ —Ç–∞–∫–æ–º —Å–ª—É—á–∞–µ –∫–æ–º–º–µ–Ω—Ç–∞—Ä–∏–π –º–æ–∂–µ—Ç –±—ã—Ç—å –ª—é–±–æ–µ –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ —Å—Ç—Ä–æ–∫. –ù–∞ —Ä–∞–∑–º–µ—Ä –ø—Ä–æ–≥—Ä–∞–º–º—ã –∫–æ–º–º–µ–Ω—Ç–∞—Ä–∏–∏ –Ω–µ –≤–ª–∏—è—é—Ç. –ù—É –≤–æ—Ç, –∏–∑ –æ—Å–Ω–æ–≤–Ω–æ–≥–æ –≤—Ä–æ–¥–µ –≤—Å—ë. –ù–∞ –ø–µ—Ä–≤–æ–µ –≤—Ä–µ–º—è —Ö–≤–∞—Ç–∏—Ç (–¥–æ –Ω–∞–ø–∏—Å–∞–Ω–∏—è —Å–ª–µ–¥—É—é—â–µ–π —á–∞—Å—Ç–∏ —Å—Ç–∞—Ç—å–∏) –ü–µ—Ä–≤–∞—è –ø—Ä–æ–≥—Ä–∞–º–º–∞ –ù–µ –±—É–¥–µ–º –æ—Ç—Å—Ç—É–ø–∞—Ç—å –æ—Ç —Ç—Ä–∞–¥–∏—Ü–∏–π (–∞ —Ç–æ –º–∞–ª–æ –ª–∏) –∏ –Ω–∞—á–Ω—ë–º —Å Hello World. –ê –ø–æ –ø—É—Ç–∏ –±—É–¥–µ–º –ø—Ä–æ–¥–æ–ª–∂–∞—Ç—å –∑–Ω–∞–∫–æ–º–∏—Ç—å—Å—è —Å –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–æ–º –∏ —Ç–∞–∫ —Å–∫–∞–∑–∞—Ç—å –ø–æ–ª—É—á–∞—Ç—å –æ–ø—ã—Ç. –û—Ç–∫—Ä—ã–≤–∞–µ–º —Å—Ä–µ–¥—É —Ä–∞–∑—Ä–∞–±–æ—Ç–∫–∏: –ù–∞–∂–∏–º–∞–µ–º Browse in Repository –í—ã–±–∏—Ä–∞–µ–º ST –ò –¥–∞–ª–µ–µ —Å–≤–æ–π –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä. –ü–æ—Ç–æ–º –º—ã —É–≤–∏–¥–∏–º —Å–ø–∏—Å–æ–∫ –ø–æ–¥–∫–ª—é—á–∞–µ–º—ã—Ö –±–∏–±–ª–∏–æ—Ç–µ–∫. –î–ª—è –Ω–∞—à–µ–π –ø—Ä–æ—Å—Ç–µ–Ω—å–∫–æ–π –ø—Ä–æ–≥—Ä–∞–º–º—ã –Ω–∞–º –ø–æ–Ω–∞–¥–æ–±–∏—Ç—Å—è: CMSIS core, CMSIS Boot, RCC, GPIO. –ë–∏–±–ª–∏–æ—Ç–µ–∫–∏ CMSIS core –∏ CMSIS Boot - —Å–∏—Å—Ç–µ–º–Ω—ã–µ, –∏—Ö –Ω—É–∂–Ω–æ –ø–æ–¥–∫–ª—é—á–∞—Ç—å –æ–±—è–∑–∞—Ç–µ–ª—å–Ω–æ –ë–∏–±–ª–∏–æ—Ç–µ–∫–∞ RCC –¥–ª—è —Ä–∞–±–æ—Ç—ã —Å —Å–∏—Å—Ç–µ–º–æ–π —Ç–∞–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏—è –ë–∏–±–ª–∏–æ—Ç–µ–∫–∞ GPIO –¥–ª—è —Ä–∞–±–æ—Ç—ã —Å –ø–æ—Ä—Ç–∞–º–∏ –≤–≤–æ–¥–∞-–≤—ã–≤–æ–¥–∞ –¢–µ–ø–µ—Ä—å —Å–ª–µ–≤–∞ –≤ –æ–∫–Ω–µ Project –æ—Ç–∫—Ä—ã–≤–∞–µ–º —Ñ–∞–π–ª main.c. –°–Ω–∞—á–∞–ª–∞ –Ω—É–∂–Ω–æ –ø–æ–¥–∫–ª—é—á–∏—Ç—å –Ω–∞—à–∏ –±–∏–±–ª–∏–æ—Ç–µ–∫–∏ (CMSIS –ø–æ–¥–∫–ª—é—á–∞—Ç—å –Ω–µ –Ω—É–∂–Ω–æ). –ò–¥—ë–º –≤ —Å–∞–º–æ–µ –Ω–∞—á–∞–ª–æ –ø—Ä–æ–≥—Ä–∞–º–º—ã –∏ –¥–æ–±–∞–≤–ª—è–µ–º —Å—Ç—Ä–æ—á–∫–∏: #include "stm32f10x_gpio.h" –í–æ—Ç —Ç–∞–∫: –î–∞–ª–µ–µ –Ω—É–∂–Ω–æ —Å–¥–µ–ª–∞—Ç—å —Ñ—É–Ω–∫—Ü–∏—é –∑–∞–¥–µ—Ä–∂–∫–∏ (–Ω–µ —Ö–æ—Ç–∏–º –∂–µ –º—ã –º–∏–≥–∞—Ç—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–æ–º —Å —á–∞—Å—Ç–æ—Ç–æ–π –≤ –Ω–µ—Å–∫–æ–ª—å–∫–æ –ú–ì—Ü?). void Delay(int i) { –¢–∞–∫. –¢—É—Ç –ø–æ –ø–æ—Ä—è–¥–∫—É, —Ñ—É–Ω–∫—Ü–∏—è –Ω–∏—á–µ–≥–æ –Ω–µ –≤–æ–∑–≤—Ä–∞—â–∞–µ—Ç, –ø–æ —ç—Ç–æ–º—É void, –Ω–∞–∑–≤–∞–Ω–∏–µ —Ñ—É–Ω–∫—Ü–∏–∏ Delay, —Å—Ä–∞–∑—É –æ–±—ä—è–≤–ª—è–µ–º –ø–µ—Ä–µ–º–µ–Ω–Ω—É—é i —Ç–∏–ø–∞ int. –í —Ñ–∏–≥—É—Ä–Ω—ã—Ö —Å–∫–æ–±–∫–∞—Ö —Ç–µ–ª–æ —Ñ—É–Ω–∫—Ü–∏–∏ - —Ü–∏–∫–ª for. –≠—Ç–æ –µ–≥–æ —Å—Ç—Ä–æ—á–Ω–∞—è –∑–∞–ø–∏—Å—å. –ù–∞—á–∞–ª—å–Ω–æ–µ –∑–Ω–∞—á–µ–Ω–∏–µ i –º—ã –Ω–µ –∏–∑–º–µ–Ω—è–µ–º, —Ü–∏–∫–ª –≤—ã–ø–æ–ª–Ω—è–µ—Ç—Å—è, –ø–æ–∫–∞ i –Ω–µ —Ä–∞–≤–Ω–∞ –Ω—É–ª—é (–∫–∞–∫ i —Å—Ç–∞–Ω–æ–≤–∏—Ç—Å—è —Ä–∞–≤–Ω–∞ –Ω—É–ª—é, —Ü–∏–∫–ª –ø—Ä–µ–∫—Ä–∞—â–∞–µ—Ç—Å—è, —Ñ—É–Ω–∫—Ü–∏—è «–≤—ã–∫–ª—é—á–∞–µ—Å—è»). –° –∫–∞–∂–¥—ã–º –≤—ã–ø–æ–ª–Ω–µ–Ω–∏–µ–º —Ç–µ–ª–∞ —Ü–∏–∫–ª–∞ (—Ç–∞–∫—Ç–æ–º) –ø–µ—Ä–µ–º–µ–Ω–Ω–∞—è i —É–º–µ–Ω—å—à–∞–µ—Ç—Å—è –Ω–∞ 1. –¢.–µ. —Å—É—Ç—å —Ü–∏–∫–ª–∞ - –ø—Ä–æ—Å—Ç–æ –ø–æ–≤—Ç–æ—Ä–∏—Ç—å—Å—è –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ —Ä–∞–∑ —Ä–∞–≤–Ω–æ–µ i. –ü–æ–∫–∞ –≤—ã–ø–æ–ª–Ω—è–µ—Ç—Å—è —Ü–∏–∫–ª –≤—Ä–µ–º—è –∏–¥—ë—Ç, –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç –∑–∞–¥–µ—Ä–∂–∫–∞. –î–∞–ª–µ–µ –≤ –≥–ª–∞–≤–Ω–æ–π —Ñ—É–Ω–∫—Ü–∏–∏ main –Ω—É–∂–Ω–æ –≤–∫–ª—é—á–∏—Ç—å —Ç–∞–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ –ø–æ—Ä—Ç–∞, –∫–∞–∫ —ç—Ç–æ —Å–¥–µ–ª–∞—Ç—å –º–æ–∂–Ω–æ –ø–æ—Å–º–æ—Ç—Ä–µ—Ç—å –≤ —Ñ–∞–π–ª–µ stm32f10x_rcc.h: –ö–∞–∫–æ–π –ø–æ—Ä—Ç –æ—Ç–≤–µ—Ç—Å—Ç–≤–µ–Ω–Ω—ã–π –∑–∞ –∫–∞–∫–æ–π –≤—ã–≤–æ–¥ –º–æ–∂–Ω–æ –ø–æ—Å–º–æ—Ç—Ä–µ—Ç—å –≤ –¥–æ–∫—É–º–µ–Ω—Ç–∞—Ü–∏–∏ –∫ –ú–ö: –î–ª—è —Ç–∞–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏—è –ø–æ—Ä—Ç–∞ –° –¥–æ–±–∞–≤–ª—è–µ–º —Å—Ç—Ä–æ—á–∫—É: RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC , ENABLE); –î–∞–ª–µ–µ –Ω—É–∂–Ω–æ –Ω–∞—Å—Ç—Ä–æ–∏—Ç—å –≤—ã–≤–æ–¥—ã. –°–º–æ—Ç—Ä–∏–º, –≤ —Ñ–∞–π–ª–µ stm32f10x_gpio.h –≤ –∫–∞–∫–æ–π —Å—Ç—Ä—É–∫—Ç—É—Ä–µ –Ω–∞—Å—Ç—Ä–∞–∏–≤–∞—é—Ç—Å—è –≤—ã–≤–æ–¥—ã: –î–æ–±–∞–≤–ª—è–µ–º –≤ –ø—Ä–æ–≥–∞—Ä–º–º—É —Å—Ç—Ä–æ—á–∫—É: GPIO_InitTypeDef GPIO_Init1; –≠—Ç–æ–π —Å—Ç—Ä–æ—á–∫–æ–π –º—ã –æ–±—ä—è–≤–∏–ª–∏ —Å—Ç—Ä—É–∫—Ç—É—Ä—É GPIO_InitTypeDef - –¥–∞–ª–∏ –µ–π –Ω–∞–∑–≤–∞–Ω–∏–µ GPIO_Init –¥–ª—è –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏—è –≤ –Ω–∞—à–µ–π –ø—Ä–æ–≥—Ä–∞–º–º–µ –¥–∞–ª–µ–µ. –ö–∞–∫–∏–µ –≤ —ç—Ç–æ–π —Å—Ç—Ä—É–∫—Ç—É—Ä–µ –º–æ–∂–Ω–æ –Ω–∞—Å—Ç—Ä–æ–∏—Ç—å –ø–∞—Ä–∞–º–µ—Ç—Ä—ã –∏ –∫–∞–∫–æ–π –≤–∏–¥ –æ–Ω–∏ –∏–º–µ—é—Ç, —Å–º–æ—Ç—Ä–∏–º –≤—Å—ë –≤ —Ç–æ–º –∂–µ stm32f10x_gpio.h: –¢–µ–ø–µ—Ä—å —á—Ç–æ–±—ã –Ω–∞—Å—Ç—Ä–æ–∏—Ç—å –ø–∞—Ä–∞–º–µ—Ç—Ä—ã –≤—ã–≤–æ–¥–æ–≤ –ø—Ä–∏ –ø–æ–º–æ—â–∏ —Å—Ç—Ä—É–∫—Ç—É—Ä—ã –Ω—É–∂–Ω–æ –Ω–∞–ø–∏—Å–∞—Ç—å –µ—ë –Ω–∞–∑–≤–∞–Ω–∏–µ, –ø–æ—Å—Ç–∞–≤–∏—Ç—å —Ç–æ—á–∫—É –∏ –ø–æ—è–≤–∏—Ç—Å—è –æ–∫–æ—à–µ—á–∫–æ –≤ –∫–æ—Ç–æ—Ä–æ–º —ç—Ç–∏ –ø–∞—Ä–∞–º–µ—Ç—Ä—ã —É–∫–∞–∑–∞–Ω—ã –î–≤–∞–∂–¥—ã —â—ë–ª–∫–∞–µ–º –ø–æ –æ–¥–Ω–æ–º—É –∏–∑ –Ω–∏—Ö, –∏ –æ–Ω –ø–æ—è–≤–ª—è–µ—Ç—Å—è –≤ —Å—Ç—Ä–æ–∫–µ, –¥–∞–ª–µ–µ —Å—Ç–∞–≤–∏–º = (–ø—Ä–∏—Å–≤–æ–∏—Ç—å) –∏ –ø—Ä–æ–ø–∏—Å—ã–≤–∞–µ–º –∑–Ω–∞—á–µ–Ω–∏–µ –∏–∑ stm32f10x_gpio.h –¢–∞–∫ –∂–µ –ø–æ—Å—Ç—É–ø–∞–µ–º —Å–æ –≤—Å–µ–º–∏ –ø–∞—Ä–∞–º–µ—Ç—Ä–∞–º–∏. –ù–µ –∑–∞–±—ã–≤–∞–µ–º —Ç–æ—á–∫—É —Å –∑–∞–ø—è—Ç–æ–π –≤ –∫–æ–Ω—Ü–µ –∫–∞–∂–¥–æ–π —Å—Ç—Ä–æ–∫–∏! –î–∞–ª–µ–µ –Ω—É–∂–Ω–∞ —Å—Ç—Ä–æ–∫–∞ –∏–Ω–∏—Ü–∏–∞–ª–∏–∑–∞—Ü–∏–∏ (–Ω–µ –æ–±—è–∑–∞—Ç–µ–ª—å–Ω–æ, –Ω–æ –≤–æ –∏–∑–±–µ–∂–∞–Ω–∏–∏ –Ω–µ–ø—Ä–∏—è—Ç–Ω–æ—Å—Ç–µ–π –∂–µ–ª–∞—Ç–µ–ª—å–Ω–∞) GPIO_Init(GPIOC , &GPIO_Init); –¢–µ–ø–µ—Ä—å –±—É–¥–µ–º –º–∏–≥–∞—Ç—å! –ú–∏–≥–∞—Ç—å –º—ã –±—É–¥–µ–º —Ü–∏–∫–ª–∏—á–Ω–æ, —Å–¥–µ–ª–∞–µ–º –∑–∞—Ü–∏–∫–ª–∏–≤–∞–Ω–∏–µ –≤ —Ü–∏–∫–ª–µ while. –£—Å–ª–æ–≤–∏–µ —Ü–∏–∫–ª–∞ –±—É–¥–µ—Ç 1. –ï–¥–µ–Ω–∏—Ü–∞ - –≤—Å–µ–≥–¥–∞ –∏—Å—Ç–∏–Ω–∞, –Ω—É–ª—å - –≤—Å–µ–≥–¥–∞ –ª–æ–∂—å.. —Ç–∞–∫–æ–≤–∞ —Å–µ –ª—è –≤–∏.. –ß—Ç–æ–±—ã –ø–æ–¥–∞—Ç—å —Ç–æ–∫ –Ω–∞ –≤—ã–≤–æ–¥ –Ω—É–∂–Ω–æ —É—Å—Ç–∞–Ω–æ–≤–∏—Ç—å –±–∏—Ç, —á—Ç–æ–±—ã –≤—ã–∫–ª—é—á–∏—Ç—å –≤—ã–≤–æ–¥ –Ω—É–∂–Ω–æ —Å–±—Ä–æ—Å–∏—Ç—å –±–∏—Ç. –ö–∞–∫ —ç—Ç–æ –¥–µ–ª–∞—Ç—å - –≤—Å—ë –≤ —Ç–æ–º –∂–µ stm32f10x_gpio.h: –î–µ–ª–∞–µ–º —Ç–∞–∫: while (1){ GPIO_SetBits(GPIOC, GPIO_Pin_9); Delay (200000); GPIO_ResetBits(GPIOC, GPIO_Pin_9); Delay (200000); } 1 –≤—Å–µ–≥–¥–∞ –∏—Å—Ç–∏–Ω–∞, –∑–Ω–∞—á–∏—Ç —Ü–∏–∫–ª –±—É–¥–µ—Ç –∑–∞—Ü–∏–∫–ª–∏–≤–∞–Ω–∏–µ. GPIO_SetBits - —Ñ—É–Ω–∫—Ü–∏—è —É—Å—Ç–∞–Ω–æ–≤–∫–∏ –±–∏—Ç–∞ GPIO_ResetBits - —Ñ—É–Ω–∫—Ü–∏—è —Å–±—Ä–æ—Å–∞ –±–∏—Ç–∞ Delay (200000) - –Ω–∞ —ç—Ç–æ–π —Å—Ç—Ä–æ—á–∫–µ –≤—ã–ø–æ–ª–Ω–µ–Ω–∏–µ –ø—Ä–æ–≥—Ä–∞–º–º—ã –ø–µ—Ä–µ—Ö–æ–¥–∏—Ç –≤ —Ñ—É–Ω–∫—Ü–∏—é Delay, –≤ —Ç—É —Å–∞–º—É—é, –≤ –∫–æ—Ç–æ—Ä–æ–π —Ü–∏–∫–ª for. –ß–∏—Å–ª–æ 200000 –≤ —Å–∫–æ–±–∫–∞—Ö - –ø–µ—Ä–µ–¥–∞—ë—Ç—Å—è –≤ —ç—Ç—É —Ñ—É–Ω–∫—Ü–∏—é, –∫–∞–∫ –ø–µ—Ä–µ–º–µ–Ω–Ω–∞—è i. (–ø–æ–º–Ω–∏–º —Å—Ç—Ä–æ—á–∫—É void Delay(int i)?) –∏ –≤—ã–ø–æ–ª–Ω—è–µ—Ç—Å—è —Ç–æ—Ç —Å–∞–º—ã–π —Ü–∏–∫–ª –≤ —ç—Ç–æ–π —Ñ—É–Ω–∫—Ü–∏–∏, –≤—Å–µ 200000 —Ä–∞–∑. –≠—Ç–æ –±—ã—Å—Ç—Ä–æ :) –ø–æ—Å–ª–µ –æ–∫–æ–Ω—á–∞–Ω–∏—è —Ä–∞–±–æ—Ç—ã —Ü–∏–∫–ª–∞ for —Ñ—É–Ω–∫—Ü–∏—è Delay –∑–∞–∫–∞–Ω—á–∏–≤–∞–µ—Ç —Å–≤–æ—é —Ä–∞–±–æ—Ç—É, —Ç.–∫. –æ–Ω–∞ void, —Ç–æ –æ–Ω–∞ –Ω–∏—á–µ–≥–æ –Ω–µ –≤–æ–∑–≤—Ä–∞—â–∞–µ—Ç –∏ –ø—Ä–æ–≥—Ä–∞–º–º–∞ –ø—Ä–æ–¥–æ–ª–∂–∞–µ—Ç –≤—ã–ø–æ–ª–Ω—è–µ—Ç—Å—è –¥–∞–ª—å—à–µ. –¢.–∫. while –∑–∞—Ü–∏–∫–ª–µ–Ω, —Ç–æ –≤–∫–ª—é—á–µ–Ω–∏–µ —Å–≤–µ—Ç–æ–¥–∏–æ–¥–∞, –∑–∞–¥–µ—Ä–∂–∫–∞, –≤—ã–∫–ª—é—á–µ–Ω–∏–µ —Å–≤–µ—Ç–æ–¥–∏–æ–¥–∞, –∑–∞–¥–µ—Ä–∂–∫–∞ –±—É–¥—É—Ç –≤—ã–ø–æ–ª–Ω—è—Ç—å—Å—è –±–µ—Å–∫–æ–Ω–µ—á–Ω–æ —Ü–∏–∫–ª–∏—á–Ω–æ. –ü–æ–∫–∞ –Ω–µ –≤—ã–∫–ª—é—á–∏—Ç—Å—è –ø–∏—Ç–∞–Ω–∏–µ –∏–ª–∏ –Ω–µ –ø—Ä–æ–∏–∑–æ–π–¥—ë—Ç –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–µ (–æ–± —ç—Ç–æ–º –≤ —Å–ª–µ–¥—É—é—â–µ–π —Å—Ç–∞—Ç—å–µ). –ù—É –≤–æ—Ç, –ø–µ—Ä–≤–∞—è –ø—Ä–æ–≥—Ä–∞–º–º–∞ –≥–æ—Ç–æ–≤–∞. –¢–µ–ø–µ—Ä—å –Ω–∞–∂–∏–º–∞–µ–º F7, –ø—Ä–æ–≥—Ä–∞–º–º–∞ –∫–æ–º–ø–∏–ª–∏—Ä—É–µ—Ç—Å—è. –¢–µ–ø–µ—Ä—å –µ—Å–ª–∏ —É –í–∞—Å –æ—Ç–ª–∞–¥–æ—á–Ω–∞—è –ø–ª–∞—Ç–∞, —Ç–æ –ø–æ–¥–∫–ª—é—á–∞–µ–º –µ—ë –ø—Ä–∏ –ø–æ–º–æ—â–∏ USB —à–Ω—É—Ä–∫–∞ –∏ –Ω–∞–∂–∏–º–∞–µ–º Download Code To Flash. –Ý–∞–¥—É–µ–º—Å—è –≤—ã–ø–æ–ª–Ω–µ–Ω–Ω–æ–π —Ä–∞–±–æ—Ç–µ –∏ –ø–æ–ª—É—á–µ–Ω–Ω—ã–º –∑–Ω–∞–Ω–∏—è–º :) –ê –µ—Å–ª–∏ —É –í–∞—Å –Ω–µ –æ—Ç–ª–∞–¥–æ—á–Ω–∞—è –ø–ª–∞—Ç–∞, —Ç–æ –ø–æ–¥–∫–ª—é—á–∏—Ç–µ –∫ —Å–≤–æ–µ–π –ø–ª–∞—Ç–µ –ø–µ—Ä–µ—Ö–æ–¥–Ω–∏–∫ —Å–¥–µ–ª–∞–Ω—ã–π —Ä–∞–Ω–µ–µ, –∞ –ø–µ—Ä–µ—Ö–æ–¥–Ω–∏–∫ –∫ COM-–ø–æ—Ä—Ç—É –∫–æ–º–ø—å—é—Ç–µ—Ä–∞. –î–∞–ª–µ–µ —Å–æ–µ–¥–∏–Ω–∏—Ç–µ –≤—ã–≤–æ–¥ BOOT 0 c –ø–ª—é—Å–æ–º –ø–∏—Ç–∞–Ω–∏—è –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞ –∏ –≤–∫–ª—é—á–∏—Ç–µ –ø–∏—Ç–∞–Ω–∏–µ –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞. –¢–µ–º —Å–∞–º—ã–º –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –≤–æ–π–¥–µ—Ç –≤ —Ä–µ–∂–∏–º –ø—Ä–æ—à–∏–≤–∫–∏. –í–æ–æ–±—â–µ –ø—Ä–æ—Ü–µ–¥—É—Ä–∞ –ø—Ä–æ—à–∏–≤–∫–∏ –Ω–µ —Å–ª–æ–∂–Ω–∞—è. –ù—É–∂–Ω–æ –ø—Ä–æ—Å—Ç–æ —Å–ª–µ–¥–æ–≤–∞—Ç—å —É–∫–∞–∑–∞–Ω–∏—è–º –ø—Ä–∏–ª–æ–∂–µ–Ω–∏—è Flash Loader Demonstrator. –°–Ω–∞—á–∞–ª–∞ —É–∫–∞–∑—ã–≤–∞–µ–º –Ω–æ–º–µ—Ä COM-–ø–æ—Ä—Ç–∞, —á–µ—Ä–µ–∑ –∫–æ—Ç–æ—Ä—ã–π —É –í–∞—Å –ø–æ–¥–∫–ª—é—á–µ–Ω –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –∏ —Å–∫–æ—Ä–æ—Å—Ç—å. –î–ª—è –≤–æ–∏–∑–±–µ–∂–∞–Ω–∏–∏ —Å–±–æ–µ–≤, —Å–∫–æ—Ä–æ—Å—Ç—å –ª—É—á—à–µ –≤—ã–±—Ä–∞—Ç—å –ø–æ–º–µ–Ω—å—à–µ –ï—Å–ª–∏ –ø—Ä–æ–≥—Ä–∞–º–º–∞ —É–≤–∏–¥–µ–ª–∞ –í–∞—à –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä, —Ç–æ –ø–æ—è–≤–∏—Ç—Å—è –æ–∫–Ω–æ, –≤ –∫–æ—Ç–æ—Ä–æ–º –±—É–¥–µ—Ç –Ω–∞–ø–∏—Å–∞–Ω–æ, —Å–∫–æ–ª—å–∫–æ —É –Ω–µ–≥–æ –ø–∞–º—è—Ç–∏ –ü–æ—Å–ª–µ –Ω–∞–∂–∞—Ç–∏—è «Next», –í—ã —É–≤–∏–¥–∏—Ç–µ —Å—Ç—Ä–∞–Ω–∏—Ü—É —Å –∞–¥—Ä–µ—Å–∞—Ü–∏–µ–π –ø–∞–º—è—Ç–∏. –û–Ω–∞ –Ω–∞–º –Ω–µ –ø–æ–Ω–∞–¥–æ–±–∏—Ç—Å—è. –°–ª–µ–¥—É—é—â–∏–π —à–∞–≥ —Å–∞–º—ã–π –æ—Ç–≤–µ—Ç—Å—Ç–≤–µ–Ω–Ω—ã–π. –ú–æ–∂–Ω–æ –≤—ã–±—Ä–∞—Ç—å –æ—á–∏—Å—Ç–∫—É –ø–∞–º—è—Ç–∏ –∏–ª–∏ –ø—Ä–æ—à–∏–≤–∫—É –î–ª—è –ø—Ä–æ—à–∏–≤–∫–∏ –≤—ã–±–∏—Ä–∞–µ–º Download to device –∏ –≤ –ø–æ–ª–µ Download from file –≤—ã–±–∏—Ä–∞–µ–º –∫–æ–º–ø–∏–ª–∏—Ä–æ–≤–∞–Ω–Ω—ã–π .hex —Ñ–∞–π–ª, –∫–æ—Ç–æ—Ä—ã–π –Ω–∞—Ö–æ–¥–∏—Ç—Å—è –≤ –ø–∞–ø–∫–µ CooCox -> CooIDE -> workspace -> –∏–º—è_–ø—Ä–æ–µ–∫—Ç–∞ -> –∏–º—è_–ø—Ä–æ–µ–∫—Ç–∞ -> Debug -> Bin. –ü–æ—Å–ª–µ —Å–Ω–æ–≤–∞ –Ω–∞–∂–∏–º–∞–µ–º «Next». –ü–æ—Å–ª–µ —Ç–æ–≥–æ, –∫–∞–∫ —É–≤–∏–¥–∏–º —Ç–∞–∫–æ–µ –æ–∫–Ω–æ: –û—Ç–∫–ª—é—á–∞–µ–º –ø–∏—Ç–∞–Ω–∏–µ –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞, –∑–∞–∫—Ä—ã–≤–∞–µ–º Flash Loader Demonstrator, –æ—Ç–∫–ª—é—á–∞–µ–º –ø–µ—Ä–µ—Ö–æ–¥–Ω–∏–∫, –∏ –≤–∫–ª—é—á–∞–µ–º –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –≤ –æ–±—ã—á–Ω–æ–º —Ä–µ–∂–∏–º–µ (–∫–æ–≥–¥–∞ –ø—Ä–∏ –≤–∫–ª—é—á–µ–Ω–∏–∏ –≤—ã–≤–æ–¥ BOOT 0 —Å–æ–µ–¥–∏–Ω–µ–Ω —Å –º–∏–Ω—É—Å–æ–º –ø–∏—Ç–∞–Ω–∏—è –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞). –Ý–∞–¥—É–µ–º—Å—è!
–ò—Ç–∞–∫, —Ç–µ–ø–µ—Ä—å –º—ã –∑–Ω–∞–µ–º, —á–µ–º –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä—ã STM –ª—É—á—à–µ –¥—Ä—É–≥–∏—Ö, –∑–Ω–∞–µ–º –∫–∞–∫ —Ä–∞–±–æ—Ç–∞–µ—Ç –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä, —É–º–µ–µ–º –ø—Ä–æ—à–∏–≤–∞—Ç—å –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –≤ –æ—Ç–ª–∞–¥–æ—á–Ω–æ–π –ø–ª–∞—Ç–µ –∏ –≤ —Å–≤–æ–µ–π –ø–ª–∞—Ç–µ, –∑–Ω–∞–µ–º –æ—Å–Ω–æ–≤—ã —è–∑—ã–∫–∞ –°–∏, –∫–æ—Ç–æ—Ä—ã–µ –Ω—É–∂–Ω—ã –¥–ª—è –ø—Ä–æ–≥—Ä–∞–º–º–∏—Ä–æ–≤–∞–Ω–∏—è STM32, –ø–æ–ª—É—á–∏–ª–∏ –æ–ø—ã—Ç —Ä–∞–±–æ—Ç—ã —Å –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–æ–º (–Ω–∞–¥–µ—é—Å—å –ø–æ–ª–æ–∂–∏—Ç–µ–ª—å–Ω—ã–π) –∏ —Å–∞–º–æ–µ –≥–ª–∞–≤–Ω–æ–µ, —Ç–µ–ø–µ—Ä—å –í—ã –º–æ–∂–µ—Ç–µ –≤–æ–ø–ª–æ—Ç–∏—Ç—å —Å–≤–æ–∏ –∏–¥–µ–∏ —Ü–∏—Ñ—Ä–æ–≤—ã—Ö —É—Å—Ç—Ä–æ–π—Å—Ç–≤ –≤ –∂–∏–∑–Ω—å (–∏ –ø–æ–≤–µ–¥–∞—Ç—å –æ –Ω–∏—Ö, –Ω–∞ –Ω–∞—à–µ–º –ª—é–±–∏–º–æ–º –Ý–∞–¥–∏–æ–ö–æ—Ç–µ)! –ü—É—Å—Ç—å –ø–æ–∫–∞ –µ—â—ë –ø—Ä–æ—Å—Ç–µ–Ω—å–∫–∏–µ, –Ω–æ –≤—Å—ë –Ω–∞–≤—ë—Ä—Å—Ç—ã–≤–∞–µ—Ç—Å—è —Å –æ–ø—ã—Ç–æ–º. –ê —è –ø–æ—Å—Ç–∞—Ä–∞—é—Å—å –≤ —Å–ª–µ–¥—É—é—â–∏—Ö —Å—Ç–∞—Ç—å—è—Ö —Ä–∞—Å—Å–∫–∞–∑–∞—Ç—å –æ–± –ê–¶–ü, –¶–ê–ü, –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è—Ö, –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–∏–∏ –æ—Ç–ª–∞–¥–∫–∏ –∏ –¥—Ä—É–≥–∏—Ö –ø–æ–ª–µ–∑–Ω–æ—Å—Ç—è—Ö. –£–¥–∞—á–Ω–æ–≥–æ –≤–æ–ø–ª–æ—â–µ–Ω–∏—è –∏–¥–µ–π! –í—Å–µ –≤–æ–ø—Ä–æ—Å—ã, –Ω–µ —Å—Ç–µ—Å–Ω—è–µ–º—Å—è, –ø–∏—à–µ–º –Ω–∞ —Ñ–æ—Ä—É–º
–ê –µ—â—ë —Ö–æ—á—É –ø–æ–∑–¥—Ä–∞–≤–∏—Ç—å –Ý–∞–¥–∏–æ–ö–æ—Ç–∞ —Å –µ–≥–æ –≥–ª–∞–≤–Ω—ã–º –ø—Ä–∞–∑–¥–Ω–∏–∫–æ–º! –ü—É—Å—Ç—å –≤—Ä–µ–º—è –∏ —Ç–µ—á—ë—Ç, –∫–∞–∫ —Ñ–ª—é—Å –∏–∑ —É–ø–∞–≤—à–µ–≥–æ —Ñ–ª–∞–∫–æ–Ω–∞, –Ω–æ –Ý–∞–¥–∏–æ–ö–æ—Ç –≤—Å–µ–≥–¥–∞ –æ—Å—Ç–∞–Ω–µ—Ç—Å—è –Ω–∞—à–∏–º –Ω–µ–∑–∞–º–µ–Ω–∏–º—ã–º –ø–æ–º–æ—â–Ω–∏–∫–æ–º –∏ –ø—Ä–∏—é—Ç–æ–º –¥–ª—è –∫–æ—Ç–æ–≤ (–∏ –∫–æ—Ç—è—Ç) —Å –ø–∞—è–ª—å–Ω–∏–∫–∞–º–∏. –ó–¥–æ—Ä–æ–≤—å—è —Ç–µ–±–µ (–≤—Å–µ 7 —à—Ç—É–∫), –Ω–µ—á–µ–ª–æ–≤–µ—á—å–µ–≥–æ —Å—á–∞—Å—Ç—å—è –∏ —Å–±—ã—á–∏ –∫–æ—à–∞—á–∏—Ö –º–µ—á—Ç! –°–æ–±–ª—é–¥–∞–π –¢–ë :)
–§–∞–π–ª—ã: –í—Å–µ –≤–æ–ø—Ä–æ—Å—ã –≤ –§–æ—Ä—É–º.
–≠—Ç–∏ —Å—Ç–∞—Ç—å–∏ –≤–∞–º —Ç–æ–∂–µ –º–æ–≥—É—Ç –ø—Ä–∏–≥–æ–¥–∏—Ç—å—Å—è: |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
 |


 |
||||

|
||||

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
–Ý–∞–±–æ—Ç–æ—Å–ø–æ—Å–æ–±–Ω–æ—Å—Ç—å —Å–∞–π—Ç–∞ –ø—Ä–æ–≤–µ—Ä–µ–Ω–∞ –≤ –±—Ä–∞—É–∑–µ—Ä–∞—Ö:
IE8.0, Opera 9.0, Netscape Navigator 7.0, Mozilla Firefox 5.0
–ê–¥–∞–ø—Ç–∏—Ä–æ–≤–∞–Ω –¥–ª—è —Ä–∞–±–æ—Ç—ã –ø—Ä–∏ —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è—Ö —ç–∫—Ä–∞–Ω–∞ –æ—Ç 1280—Ö1024 –∏ –≤—ã—à–µ.
–ü—Ä–∏ –º–µ–Ω—å—à–∏—Ö —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è—Ö –≤–æ–∑–º–æ–∂–Ω–æ –ø–æ—è–≤–ª–µ–Ω–∏–µ –≥–æ—Ä–∏–∑–æ–Ω—Ç–∞–ª—å–Ω–æ–π –ø—Ä–æ–∫—Ä—É—Ç–∫–∏.
–ü–æ –≤—Å–µ–º –≤–æ–ø—Ä–æ—Å–∞–º –æ–±—Ä–∞—â–∞–π—Ç–µ—Å—å –∫ –ö–æ—Ç—É: kot@radiokot.ru
©2005-2026