 |
 |
|||||||||||||||
–î–µ–ª—å—Ç–∞-–°–∏–≥–º–∞ –ê–¶–ü –¥–ª—è –ú–ö –Ω–∞ –ø—Ä–∏–º–µ—Ä–µ ATtiny2313
Автор: Куркин Алексей aka Gudd-Head В данной статье я попытаюсь объяснить принцип работы дельта-сигма (ДС, называемого также сигма-дельта) аналогово-цифрового преобразователя (АЦП) и показать, как его можно прикошачить к любому (как мне кажется) микроконтроллеру (МК). Почему в качестве МК была выбрана именно эта тинька? Просто потому, что она у меня завалялась, да ещё и в DIP-корпусе, удобном для макетирования! А ещё у неё нет встроенного АЦП. К тому же, судя по размеру посвящённой ей темы форума [1], она приобрела народную любовь. Плюс ко всему, буду стараться не использовать дорогие и труднодоставаемые компоненты. Современный ДС АЦП состоит из дельта-сигма модулятора и цифрового преобразователя — децимирующего цифрового фильтра, который, в свою очередь, состоит из фильтра нижних частот (ФНЧ) и дециматора (рис. 1) [2].
–Ý–∏—Å.1. –°—Ç—Ä—É–∫—Ç—É—Ä–∞ –¥–µ–ª—å—Ç–∞-—Å–∏–≥–º–∞ –ê–¶–ü –í –æ—Ç–ª–∏—á–∏–µ –æ—Ç –ê–¶–ü –¥—Ä—É–≥–∏—Ö –≤–∏–¥–æ–≤, –≤ –¥–µ–ª—å—Ç–∞-—Å–∏–≥–º–∞ –ê–¶–ü –æ—Ç—Å—á–µ—Ç—ã –±–µ—Ä—É—Ç—Å—è –Ω–µ –≤ —Ç–æ—á–∫–∞—Ö –¥–∏—Å–∫—Ä–µ—Ç–∏–∑–∞—Ü–∏–∏, –∞ –Ω–∞ –∏–Ω—Ç–µ—Ä–≤–∞–ª–∞—Ö –∏ —è–≤–ª—è—é—Ç—Å—è, —Å–ª–µ–¥–æ–≤–∞—Ç–µ–ª—å–Ω–æ, —Å—Ä–µ–¥–Ω–∏–º–∏ –∑–Ω–∞—á–µ–Ω–∏—è–º–∏ –ø—Ä–µ–æ–±—Ä–∞–∑—É–µ–º–æ–≥–æ —Å–∏–≥–Ω–∞–ª–∞ –Ω–∞ —ç—Ç–∏—Ö –∏–Ω—Ç–µ—Ä–≤–∞–ª–∞—Ö. –î–∏—Å–∫—Ä–µ—Ç–∏–∑–∞—Ü–∏—è —Å–∏–≥–Ω–∞–ª–∞ –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç –Ω–∞ —á–∞—Å—Ç–æ—Ç–µ, –∑–Ω–∞—á–∏—Ç–µ–ª—å–Ω–æ –ø—Ä–µ–≤—ã—à–∞—é—â—É—é —É–¥–≤–æ–µ–Ω–Ω—É—é –≤–µ—Ä—Ö–Ω—é—é —á–∞—Å—Ç–æ—Ç—É —Å–ø–µ–∫—Ç—Ä–∞ –ø–æ–ª–µ–∑–Ω–æ–≥–æ —Å–∏–≥–Ω–∞–ª–∞ (–≤ –¥–µ—Å—è—Ç–∫–∏ –∏ —Å–æ—Ç–Ω–∏ —Ä–∞–∑). –û–±–∞ —ç—Ç–∏—Ö —Ñ–∞–∫—Ç–∞ –ø–æ–∑–≤–æ–ª—è—é—Ç –∑–Ω–∞—á–∏—Ç–µ–ª—å–Ω–æ –ø–æ–Ω–∏–∑–∏—Ç—å —Å–ø–µ–∫—Ç—Ä–∞–ª—å–Ω—É—é –ø–ª–æ—Ç–Ω–æ—Å—Ç—å —Å—Ä–µ–¥–Ω–µ–π –º–æ—â–Ω–æ—Å—Ç–∏ —à—É–º–∞ –∫–≤–∞–Ω—Ç–æ–≤–∞–Ω–∏—è –≤ –ø–æ–ª–æ—Å–µ –ø–æ–ª–µ–∑–Ω–æ–≥–æ —Å–∏–≥–Ω–∞–ª–∞. –í—ã—Ö–æ–¥–Ω—ã–º —Å–∏–≥–Ω–∞–ª–æ–º –ø—Ä–µ–æ–±—Ä–∞–∑—É—é—â–µ–≥–æ (–¥–µ—Ü–∏–º–∏—Ä—É—é—â–µ–≥–æ) —Ñ–∏–ª—å—Ç—Ä–∞, –∏, —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–µ–Ω–Ω–æ, –ê–¶–ü –≤ —Ü–µ–ª–æ–º, —è–≤–ª—è–µ—Ç—Å—è N-—Ä–∞–∑—Ä—è–¥–Ω—ã–π —Ü–∏—Ñ—Ä–æ–≤–æ–π —Å–∏–≥–Ω–∞–ª, —á–∞—Å—Ç–æ—Ç–∞ —Å–ª–µ–¥–æ–≤–∞–Ω–∏—è –æ—Ç—Å—á–µ—Ç–æ–≤ –∫–æ—Ç–æ—Ä–æ–≥–æ —Ä–∞–≤–Ω–∞ —á–∞—Å—Ç–æ—Ç–µ –ø–µ—Ä–µ–¥–∏—Å–∫—Ä–µ—Ç–∏–∑–∞—Ü–∏–∏ Fd, –∫–æ—Ç–æ—Ä–∞—è –≤ –ú —Ä–∞–∑ –º–µ–Ω—å—à–µ —Ç–∞–∫—Ç–æ–≤–æ–π —á–∞—Å—Ç–æ—Ç—ã –º–æ–¥—É–ª—è—Ç–æ—Ä–∞ Fs (Fs=M¬∑Fd). –ú –Ω–∞–∑—ã–≤–∞–µ—Ç—Å—è –∫–æ—ç—Ñ—Ñ–∏—Ü–∏–µ–Ω—Ç–æ–º –¥–µ—Ü–∏–º–∞—Ü–∏–∏, –ø—Ä–∏—á–µ–º –æ–±—ã—á–Ω–æ –æ–Ω –≤—ã–±–∏—Ä–∞–µ—Ç—Å—è —Ç–∞–∫–∏–º –æ–±—Ä–∞–∑–æ–º, —á—Ç–æ–±—ã —á–∞—Å—Ç–æ—Ç–∞ –ø–µ—Ä–µ–¥–∏—Å–∫—Ä–µ—Ç–∏–∑–∞—Ü–∏–∏ –±—ã–ª–∞ –±–ª–∏–∑–∫–∞ –∫ —É–¥–≤–æ–µ–Ω–Ω–æ–π –≤–µ—Ä—Ö–Ω–µ–π —á–∞—Å—Ç–æ—Ç–µ —Å–ø–µ–∫—Ç—Ä–∞ –ø–æ–ª–µ–∑–Ω–æ–≥–æ —Å–∏–≥–Ω–∞–ª–∞. –ò–∑ —Å–æ–æ–±—Ä–∞–∂–µ–Ω–∏–π —É–¥–æ–±—Å—Ç–≤–∞ –∞–ø–ø–∞—Ä–∞—Ç–Ω–æ–π —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏ —Ñ–∏–ª—å—Ç—Ä–∞ –æ–±—ã—á–Ω–æ –ú –≤—ã–±–∏—Ä–∞–µ—Ç—Å—è —Ä–∞–≤–Ω—ã–º 2^N, –≥–¥–µ N ‚Äî —Ü–µ–ª–æ–µ. –ü—Ä–µ–∏–º—É—â–µ—Å—Ç–≤–æ–º –¥–µ–ª—å—Ç–∞-—Å–∏–≥–º–∞ –ê–¶–ü –ø–µ—Ä–µ–¥ –¥—Ä—É–≥–∏–º–∏ —Ç–∏–ø–∞–º–∏ –ê–¶–ü —Ç–∞–∫–∂–µ —è–≤–ª—è–µ—Ç—Å—è —Ç–æ—Ç —Ñ–∞–∫—Ç, —á—Ç–æ, –≤ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–∏–∏ —Å —Ç–µ–æ—Ä–µ–º–æ–π –ö–æ—Ç–µ–ª—å–Ω–∏–∫–æ–≤–∞, —á–∞—Å—Ç–æ—Ç–Ω—ã–π —Å–ø–µ–∫—Ç—Ä –ø—Ä–µ–æ–±—Ä–∞–∑—É–µ–º–æ–≥–æ —Å–∏–≥–Ω–∞–ª–∞ –¥–æ–ª–∂–µ–Ω –ª–µ–∂–∞—Ç—å –¥–∏–∞–ø–∞–∑–æ–Ω–µ —á–∞—Å—Ç–æ—Ç –æ—Ç 0 –¥–æ Fd/2, –ø–æ—ç—Ç–æ–º—É –Ω–∞ –≤—Ö–æ–¥–µ –±–æ–ª—å—à–∏–Ω—Å—Ç–≤–∞ –ê–¶–ü –¥—Ä—É–≥–∏—Ö —Ç–∏–ø–æ–≤ —Å—Ç–∞–≤—è—Ç –§–ù–ß —Å —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—â–µ–π –ø–æ–ª–æ—Å–æ–π –ø—Ä–æ–ø—É—Å–∫–∞–Ω–∏—è. –î–ª—è –î–° –ê–¶–ü –¥–∞–Ω–Ω–æ–µ —Ç—Ä–µ–±–æ–≤–∞–Ω–∏–µ –∫ —Ñ–∏–ª—å—Ç—Ä—É –æ—Å–ª–∞–±–ª–µ–Ω–æ: –ø—Ä–∏ —Ç–æ–π –∂–µ —à–∏—Ä–∏–Ω–µ —Å–ø–µ–∫—Ç—Ä–∞ —Å–∏–≥–Ω–∞–ª–∞, –µ–≥–æ –≤—Ö–æ–¥–Ω–∞—è —Ñ–∏–ª—å—Ç—Ä–∞—Ü–∏—è –º–æ–∂–µ—Ç –±—ã—Ç—å –æ—Å—É—â–µ—Å—Ç–≤–ª–µ–Ω–∞ —Å –ø–æ–ª–æ–≥–∏–º —Å–ø–∞–¥–æ–º –≤ –ø—Ä–µ–¥–µ–ª–∞—Ö —á–∞—Å—Ç–æ—Ç –æ—Ç Fd/2 –¥–æ Fs/2 –∏, —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–µ–Ω–Ω–æ, —Ñ–∏–ª—å—Ç—Ä –Ω–µ –±—É–¥–µ—Ç –≤–Ω–æ—Å–∏—Ç—å —Å—É—â–µ—Å—Ç–≤–µ–Ω–Ω—ã—Ö —á–∞—Å—Ç–æ—Ç–Ω—ã—Ö –∏ —Ñ–∞–∑–æ–≤—ã—Ö –∏—Å–∫–∞–∂–µ–Ω–∏–π –≤ –ø–æ–ª–æ—Å–µ –ø—Ä–æ–ø—É—Å–∫–∞–Ω–∏—è. –õ–∏—à—å –∑–∞—Ç–µ–º, –≤ –¥–µ—Ü–∏–º–∏—Ä—É—é—â–µ–º —Ñ–∏–ª—å—Ç—Ä–µ –æ—Å—É—â–µ—Å—Ç–≤–ª—è–µ—Ç—Å—è —ç—Ñ—Ñ–µ–∫—Ç–∏–≤–Ω–∞—è —Ü–∏—Ñ—Ä–æ–≤–∞—è —Ñ–∏–ª—å—Ç—Ä–∞—Ü–∏—è —Å –ø–æ–ª–æ—Å–æ–π –ø—Ä–æ–ø—É—Å–∫–∞–Ω–∏—è –æ—Ç 0 –¥–æ Fd/2. –ü—Ä–∏ —ç—Ç–æ–º —á–∏—Å–ª–æ –∑–≤–µ–Ω—å–µ–≤ —Ñ–∏–ª—å—Ç—Ä–∞ –¥–æ–ª–∂–Ω–æ –±—ã—Ç—å –∫–∞–∫ –º–∏–Ω–∏–º—É–º –Ω–∞ –µ–¥–∏–Ω–∏—Ü—É –±–æ–ª—å—à–µ –ø–æ—Ä—è–¥–∫–∞ –º–æ–¥—É–ª—è—Ç–æ—Ä–∞. –ü—Ä–æ—Å—Ç–µ–π—à–∏–π –¥–µ—Ü–∏–º–∏—Ä—É—é—â–∏–π —Ñ–∏–ª—å—Ç—Ä –º—ã —Ä–µ–∞–ª–∏–∑—É–µ–º –ø—Ä–æ–≥—Ä–∞–º–º–Ω–æ –≤ –ú–ö, –∞ –≤–æ—Ç –º–æ–¥—É–ª—è—Ç–æ—Ä –ø—Ä–∏–¥—ë—Ç—Å—è —Å–¥–µ–ª–∞—Ç—å –≤–Ω–µ—à–Ω–∏–π. –Ý–∞—Å—Å–º–æ—Ç—Ä–∏–º —Å—Ç—Ä—É–∫—Ç—É—Ä–Ω—É—é —Å—Ö–µ–º—É –º–æ–¥—É–ª—è—Ç–æ—Ä–∞ –ø–µ—Ä–≤–æ–≥–æ –ø–æ—Ä—è–¥–∫–∞ (—Å–º. —Ä–∏—Å. 2) [3]. –ú–æ–¥—É–ª—è—Ç–æ—Ä –ø—Ä–µ–¥—Å—Ç–∞–≤–ª—è–µ—Ç —Å–æ–±–æ–π —Å–∏–Ω—Ö—Ä–æ–Ω–∏–∑–∏—Ä–æ–≤–∞–Ω–Ω—ã–π —á–∞—Å—Ç–æ—Ç–æ–π –¥–∏—Å–∫—Ä–µ—Ç–∏–∑–∞—Ü–∏–∏ f—Ç–∞–∫—Ç –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å ¬´–Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ-—á–∞—Å—Ç–æ—Ç–∞¬ª —Å –Ω–µ–ø—Ä–µ—Ä—ã–≤–Ω—ã–º –∏–Ω—Ç–µ–≥—Ä–∏—Ä–æ–≤–∞–Ω–∏–µ–º –∏ —É—Ä–∞–≤–Ω–æ–≤–µ—à–∏–≤–∞–Ω–∏–µ–º –∑–∞—Ä—è–¥–∞. –Ý–∏—Å.2. –°—Ç—Ä—É–∫—Ç—É—Ä–Ω–∞—è —Å—Ö–µ–º–∞ –¥–µ–ª—å—Ç–∞-—Å–∏–≥–º–∞ –º–æ–¥—É–ª—è—Ç–æ—Ä–∞ –ø–µ—Ä–≤–æ–≥–æ –ø–æ—Ä—è–¥–∫–∞ ¬Ý–ü–æ—Ä—è–¥–æ–∫ –º–æ–¥—É–ª—è—Ç–æ—Ä–∞ –æ–ø—Ä–µ–¥–µ–ª—è–µ—Ç—Å—è –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ–º –∏–Ω—Ç–µ–≥—Ä–∞—Ç–æ—Ä–æ–≤ –∏ —Å—É–º–º–∞—Ç–æ—Ä–æ–≤. –£–≤–µ–ª–∏—á–µ–Ω–∏–µ –ø–æ—Ä—è–¥–∫–∞ –º–æ–¥—É–ª—è—Ç–æ—Ä–∞ –ø–æ–∑–≤–æ–ª—è–µ—Ç —É–≤–µ–ª–∏—á–∏—Ç—å —Å–æ–æ—Ç–Ω–æ—à–µ–Ω–∏–µ —Å–∏–≥–Ω–∞–ª/—à—É–º. –Ý–∞–±–æ—Ç–∞ —ç—Ç–æ–π —Å—Ö–µ–º—ã –æ—Å–Ω–æ–≤–∞–Ω–∞ –Ω–∞ –≤—ã—á–∏—Ç–∞–Ω–∏–∏ –∏–∑ –≤—Ö–æ–¥–Ω–æ–≥–æ —Å–∏–≥–Ω–∞–ª–∞ U–≤—Ö(t) –≤–µ–ª–∏—á–∏–Ω—ã —Å–∏–≥–Ω–∞–ª–∞ –Ω–∞ –≤—ã—Ö–æ–¥–µ —Ü–∏—Ñ—Ä–æ-–∞–Ω–∞–ª–æ–≥–æ–≤–æ–≥–æ –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—è (–¶–ê–ü), –ø–æ–ª—É—á–µ–Ω–Ω–æ–π –Ω–∞ –ø—Ä–µ–¥—ã–¥—É—â–µ–º —Ç–∞–∫—Ç–µ —Ä–∞–±–æ—Ç—ã —Å—Ö–µ–º—ã. –ü–æ–ª—É—á–µ–Ω–Ω–∞—è —Ä–∞–∑–Ω–æ—Å—Ç—å –∏–Ω—Ç–µ–≥—Ä–∏—Ä—É–µ—Ç—Å—è, –∞ –∑–∞—Ç–µ–º –ø—Ä–µ–æ–±—Ä–∞–∑—É–µ—Ç—Å—è –≤ –∫–æ–¥ –ø–∞—Ä–∞–ª–ª–µ–ª—å–Ω—ã–º –ê–¶–ü –Ω–µ–≤—ã—Å–æ–∫–æ–π —Ä–∞–∑—Ä—è–¥–Ω–æ—Å—Ç–∏. –ü–æ—Å–ª–µ–¥–æ–≤–∞—Ç–µ–ª—å–Ω–æ—Å—Ç—å –∫–æ–¥–æ–≤ –ø–æ—Å—Ç—É–ø–∞–µ—Ç –Ω–∞ —Ü–∏—Ñ—Ä–æ–≤–æ–π —Ñ–∏–ª—å—Ç—Ä –Ω–∏–∂–Ω–∏—Ö —á–∞—Å—Ç–æ—Ç. –í –ø—Ä–æ—Å—Ç–µ–π—à–µ–º —Å–ª—É—á–∞–µ –ê–¶–ü –∏ –¶–ê–ü –æ–¥–Ω–æ–±–∏—Ç–Ω—ã–µ, —Ç.–µ. –ê–¶–ü –ø—Ä–µ–¥—Å—Ç–∞–≤–ª—è–µ—Ç —Å–æ–±–æ–π —Ç–∞–∫—Ç–∏—Ä—É–µ–º—ã–π –∫–æ–º–ø–∞—Ä–∞—Ç–æ—Ä, –∞ –¶–ê–ü ‚Äì ¬´–ø–µ—Ä–µ–∫–ª—é—á–∞—Ç–µ–ª—嬪 –º–µ–∂–¥—É –æ–ø–æ—Ä–Ω—ã–º–∏ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏—è–º–∏ ‚ÄìU–æ–ø –∏ +U–æ–ø (—Ä–∏—Å.3).
–Ý–∏—Å.3. –°—Ç—Ä—É–∫—Ç—É—Ä–Ω–∞—è —Å—Ö–µ–º–∞ –ø—Ä–æ—Å—Ç–µ–π—à–µ–≥–æ –¥–µ–ª—å—Ç–∞-—Å–∏–≥–º–∞ –ê–¶–ü –ø–µ—Ä–≤–æ–≥–æ –ø–æ—Ä—è–¥–∫–∞ –ò—Ç–∞–∫, –Ω–∞–º –Ω–µ–æ–±—Ö–æ–¥–∏–º—ã –∞–Ω–∞–ª–æ–≥–æ–≤—ã–µ —Å—É–º–º–∞—Ç–æ—Ä/–≤—ã—á–∏—Ç–∞—Ç–µ–ª—å –∏ –∏–Ω—Ç–µ–≥—Ä–∞—Ç–æ—Ä, —Ç–∞–∫—Ç–∏—Ä—É–µ–º—ã–π –∫–æ–º–ø–∞—Ä–∞—Ç–æ—Ä, –æ–¥–Ω–æ–±–∏—Ç–Ω—ã–π –¶–ê–ü –∏ —Ü–∏—Ñ—Ä–æ–≤–æ–π —Ñ–∏–ª—å—Ç—Ä. –ö–∞–∫ —É–∂–µ –≥–æ–≤–æ—Ä–∏–ª–æ—Å—å –≤—ã—à–µ, —Ü–∏—Ñ—Ä–æ–≤–æ–π —Ñ–∏–ª—å—Ç—Ä –º—ã —Ä–µ–∞–ª–∏–∑—É–µ–º –Ω–∞ –ú–ö. –ö–æ–º–ø–∞—Ä–∞—Ç–æ—Ä –µ—Å—Ç—å —É —Ç–∏–Ω—å–∫–∏, –æ–¥–Ω–∞–∫–æ –Ω–µ –±—É–¥–µ–º –∫ –Ω–µ–º—É –ø—Ä–∏–≤—è–∑—ã–≤–∞—Ç—å—Å—è, —Ç.–∫. —É –¥—Ä—É–≥–∏—Ö –ú–ö –µ–≥–æ –Ω–µ—Ç (–∫ —Ç–æ–º—É –∂–µ, –∫–∞–∫ –±—É–¥–µ—Ç –ø–æ–∫–∞–∑–∞–Ω–æ –¥–∞–ª–µ–µ, –æ–Ω –≤—Å—ë —Ä–∞–≤–Ω–æ –Ω–µ –ø–æ–¥–æ–π–¥—ë—Ç). –°—É–º–º–∞—Ç–æ—Ä/–≤—ã—á–∏—Ç–∞—Ç–µ–ª—å —Ä–µ–∞–ª–∏–∑—É–µ–º –Ω–∞ –æ–ø–µ—Ä–∞—Ü–∏–æ–Ω–Ω–æ–º —É—Å–∏–ª–∏—Ç–µ–ª–µ (–û–£), –Ω–∞ –Ω—ë–º –∂–µ —Å–¥–µ–ª–∞–µ–º –∏ –∏–Ω—Ç–µ–≥—Ä–∞—Ç–æ—Ä –ø–æ –∫–ª–∞—Å—Å–∏—á–µ—Å–∫–∏–º —Å—Ö–µ–º–∞–º [4]. –ü–æ–ª—É—á–∞–µ—Ç—Å—è —á—Ç–æ-—Ç–æ –ø–æ—Ö–æ–∂–µ–µ –Ω–∞ —Ä–∏—Å.4. –í—Ö–æ–¥–Ω–æ–π —Å–∏–≥–Ω–∞–ª –ø–æ–¥–∞—ë—Ç—Å—è –Ω–∞ R1, –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ —Å –≤—ã—Ö–æ–¥–∞ –ê–¶–ü ‚Äî –Ω–∞ R3. –î–∞, –µ—â—ë —Ö–æ—Ä–æ—à–æ –±—ã –¥–æ–±–∞–≤–∏—Ç—å –ø–µ—Ä–µ–¥ R1 –ø–æ–≤—Ç–æ—Ä–∏—Ç–µ–ª—å ‚Äî –º–æ–∂–Ω–æ, –æ–ø—è—Ç—å –∂–µ, –Ω–∞ –û–£ ‚Äî –¥–ª—è —É–≤–µ–ª–∏—á–µ–Ω–∏—è –≤—Ö–æ–¥–Ω–æ–≥–æ —Å–æ–ø—Ä–æ—Ç–∏–≤–ª–µ–Ω–∏—è. –ò—Ç–æ–≥–æ –Ω–∞–º –ø–æ—Ç—Ä–µ–±—É–µ—Ç—Å—è –∫–∞–∫ –º–∏–Ω–∏–º—É–º 3 –æ–ø–µ—Ä–∞—Ü–∏–æ–Ω–Ω–∏–∫–∞.
¬Ý–Ý–∏—Å.4. –°—É–º–º–∞—Ç–æ—Ä/–≤—ã—á–∏—Ç–∞—Ç–µ–ª—å –∏ –∏–Ω—Ç–µ–≥—Ä–∞—Ç–æ—Ä –î–°–ú –ë—É–¥–µ–º —Å—á–∏—Ç–∞—Ç—å, —á—Ç–æ –æ—Ü–∏—Ñ—Ä–æ–≤—ã–≤–∞–µ–º—ã–π –≤—Ö–æ–¥–Ω–æ–π —Å–∏–≥–Ω–∞–ª —É –Ω–∞—Å –Ω–µ–æ—Ç—Ä–∏—Ü–∞—Ç–µ–ª—å–Ω—ã–π. –í –∫–∞—á–µ—Å—Ç–≤–µ –æ—Ç—Ä–∏—Ü–∞—Ç–µ–ª—å–Ω–æ–≥–æ –æ–ø–æ—Ä–Ω–æ–≥–æ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏—è ‚ÄìU–æ–ø –≤–æ–∑—å–º—ë–º –ø–æ—Ç–µ–Ω—Ü–∏–∞–ª –æ–±—â–µ–≥–æ –ø—Ä–æ–≤–æ–¥–∞ ‚Äî 0 –í. –ó–∞ –ø–æ–ª–æ–∂–∏—Ç–µ–ª—å–Ω–æ–µ –æ–ø–æ—Ä–Ω–æ–µ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ +U–æ–ø –ø—Ä–∏–º–µ–º –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ –ø–∏—Ç–∞–Ω–∏–µ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞. –¢–æ–≥–¥–∞ –≤ –∫–∞—á–µ—Å—Ç–≤–µ –æ–¥–Ω–æ–±–∏—Ç–Ω–æ–≥–æ –¶–ê–ü–∞ –±—É–¥–µ–º –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –ø–æ—Ä—Ç –≤—ã–≤–æ–¥–∞ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞.¬Ý–ü—Ä–æ–∞–Ω–∞–ª–∏–∑–∏—Ä—É–µ–º –≤–æ–∑–º–æ–∂–Ω—ã–µ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏—è –≤ —É–∑–ª–∞—Ö —Å—Ö–µ–º—ã, –∏–∑–æ–±—Ä–∞–∂—ë–Ω–Ω–æ–π –Ω–∞ —Ä–∏—Å.4. –í—Ö–æ–¥–Ω–æ–π —Å–∏–≥–Ω–∞–ª, —Ä–∞–≤–Ω–æ –∫–∞–∫ –∏ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ –Ω–∞ –≤—ã—Ö–æ–¥–µ –¶–ê–ü–∞ –ª–µ–∂–∏—Ç –≤ –¥–∏–∞–ø–∞–∑–æ–Ω–µ 0‚Ķ+U–æ–ø. –ó–Ω–∞—á–∏—Ç, –Ω–∞ –≤—Ö–æ–¥–µ –∏–Ω—Ç–µ–≥—Ä–∞—Ç–æ—Ä–∞ —Å–ª–µ–¥—É–µ—Ç –æ–∂–∏–¥–∞—Ç—å –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ –æ—Ç ‚ÄìU–æ–ø –¥–æ +U–æ–ø. –ò–Ω—Ç–µ–≥—Ä–∞—Ç–æ—Ä —É –Ω–∞—Å –∏–Ω–≤–µ—Ä—Ç–∏—Ä—É—é—â–∏–π, –Ω–æ —ç—Ç–æ –Ω–µ —Å—Ç—Ä–∞—à–Ω–æ, —Ç.–∫. —ç—Ç–æ –º–æ–∂–Ω–æ —É—á–µ—Å—Ç—å –ø—Ä–æ—Å—Ç–æ–π —Å–º–µ–Ω–æ–π –ø–æ–ª—è—Ä–Ω–æ—Å—Ç–∏ –∫–æ–º–ø–∞—Ä–∞—Ç–æ—Ä–∞. –ö —Å–æ–∂–∞–ª–µ–Ω–∏—é, –≤—Ö–æ–¥—ã –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞ –Ω–µ –ø–µ—Ä–µ–Ω–æ—Å—è—Ç –æ—Ç—Ä–∏—Ü–∞—Ç–µ–ª—å–Ω–æ–≥–æ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏—è, –ø–æ—ç—Ç–æ–º—É –Ω–µ –ø–æ–ª—É—á–∏—Ç—Å—è –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –≤—Å—Ç—Ä–æ–µ–Ω–Ω—ã–π –≤ 2313 –∫–æ–º–ø–∞—Ä–∞—Ç–æ—Ä. –û–¥–Ω–∞–∫–æ, –∫–æ–º–ø–∞—Ä–∞—Ç–æ—Ä —ç–ª–µ–º–µ–Ω—Ç–∞—Ä–Ω–æ –æ—Ä–≥–∞–Ω–∏–∑–æ–≤–∞—Ç—å ‚Äî –¥–∞! ‚Äî –æ–ø—è—Ç—å –∂–µ, –Ω–∞ –û–£. –ò—Ç–æ–≥–æ –ø–æ–ª—É—á–∞–µ—Ç—Å—è —Ä–æ–≤–Ω–æ 4 –æ–ø–µ—Ä–∞. –ü–æ—á–µ–º—É —Ä–æ–≤–Ω–æ? –î–∞ –ø–æ—Ç–æ–º—É —á—Ç–æ –æ–Ω–∏ –≤—ã–ø—É—Å–∫–∞—é—Ç—Å—è –ø–æ 4 —à—Ç. –≤ –æ–¥–Ω–æ–º 14-—Ç–∏ –≤—ã–≤–æ–¥–Ω–æ–º –∫–æ—Ä–ø—É—Å–µ! –≠–∫–æ–Ω–æ–º–∏—è –ø–ª–æ—â–∞–¥–∏ –ø–µ—á–∞—Ç–Ω–æ–π –ø–ª–∞—Ç—ã (–ü–ü). –•–æ—Ç—è, –Ω–∞–≤–µ—Ä–Ω–æ–µ, 4 –∫–æ—Ä–ø—É—Å–∞ microSOT23-5 –º–æ–≥—É—Ç –±—ã—Ç—å –∏ –º–µ–Ω—å—à–µ. –ù–æ —Å—á–µ—Ç–≤–µ—Ä—ë–Ω–Ω—ã–π –û–£ –µ—Å—Ç—å —É –º–µ–Ω—è –≤ –∫–æ—Ä–ø—É—Å–µ DIP! –û–¥–Ω–∞–∫–æ —É –≤—Å–µ—Ö —á–µ—Ç—ã—Ä—ë—Ö –æ–ø–µ—Ä–∞—Ü–∏–æ–Ω–Ω–∏–∫–æ–≤ –ø–∏—Ç–∞–Ω–∏–µ –æ–¥–∏–Ω–∞–∫–æ–≤–æ–µ. –ê —ç—Ç–æ –∑–Ω–∞—á–∏—Ç, —á—Ç–æ –Ω–∞ –≤—ã—Ö–æ–¥–µ –∫–æ–º–ø–∞—Ä–∞—Ç–æ—Ä–∞ –Ω–∞ –û–£ –º—ã –±—É–¥–µ–º –∏–º–µ—Ç—å ¬±U–æ–ø. –ü—Ä–∏—á—ë–º +U–æ–ø —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É–µ—Ç –ª–æ–≥–∏—á–µ—Å–∫–æ–π –µ–¥–∏–Ω–∏—Ü–µ, –∞ ‚ÄìU–æ–ø ‚Äî –ª–æ–≥–∏—á–µ—Å–∫–æ–º—É –Ω—É–ª—é. –ß—Ç–æ–±—ã –Ω–µ —Å–∂–µ—á—å –ø–æ—Ä—Ç –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞ –æ—Ç—Ä–∏—Ü–∞—Ç–µ–ª—å–Ω—ã–º –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ–º —Å –≤—ã—Ö–æ–¥–∞ –û–£, –ø–æ—Å—Ç–∞–≤–∏–º –º–µ–∂–¥—É –Ω–∏–º–∏ –±—ã—Å—Ç—Ä–æ–¥–µ–π—Å—Ç–≤—É—é—â–∏–π –¥–∏–æ–¥ (–Ω–∞–ø—Ä–∏–º–µ—Ä, 1N4148: –≤—Ä–µ–º—è –ø–µ—Ä–µ–∫–ª—é—á–µ–Ω–∏—è 4 –Ω—Å [5]) –∏ –Ω–∞ –≤—Å—è–∫–∏–π —Å–ª—É—á–∞–π –ø—Ä–∏—Ç—è–Ω–µ–º –ø–æ—Ä—Ç –∫ –∑–µ–º–ª–µ —Ä–µ–∑–∏—Å—Ç–æ—Ä–æ–º (—Ç.–Ω. ¬´pull-down¬ª) –¥–ª—è —Ä–∞–∑—Ä—è–¥–∞ –≤—Å—è–∫–∏—Ö –≥–∞–¥–∫–∏—Ö –ø–∞—Ä–∞–∑–∏—Ç–Ω—ã—Ö –µ–º–∫–æ—Å—Ç–µ–π, —á—Ç–æ–±—ã –ú–ö –∫–æ—Ä—Ä–µ–∫—Ç–Ω–æ –æ—Ç—Ä–∞–±–∞—Ç—ã–≤–∞–ª –ª–æ–≥–∏—á–µ—Å–∫–∏–π ¬´0¬ª. –ù–æ–º–∏–Ω–∞–ª—ã —Ä–µ–∑–∏—Å—Ç–æ—Ä–æ–≤?.. –í–æ–∑—å–º—ë–º, –∫ –ø—Ä–∏–º–µ—Ä—É, 10 –∫–û–º: –Ω–µ –º–Ω–æ–≥–æ –∏ –Ω–µ –º–∞–ª–æ –¥–ª—è —Ü–∏—Ñ—Ä–æ–≤–æ–π —Ç–µ—Ö–Ω–∏–∫–∏. –ù–æ–º–∏–Ω–∞–ª –∫–æ–Ω–¥–µ–Ω—Å–∞—Ç–æ—Ä–∞ –æ–±—Å—É–¥–∏–º –ø–æ–∑–∂–µ. –ü–æ–ª—É—á–µ–Ω–Ω–∞—è —Å—Ö–µ–º–∞ –∏–∑–æ–±—Ä–∞–∂–µ–Ω–∞ –Ω–∞ —Ä–∏—Å.5. –ù–∞ —Å—Ö–µ–º–µ –Ω–µ –ø–æ–∫–∞–∑–∞–Ω—ã —Ü–µ–ø–∏ –ø–∏—Ç–∞–Ω–∏—è –∏ —Ç.–ø. –Ý–∏—Å.5. –°—É–º–º–∞—Ç–æ—Ä/–≤—ã—á–∏—Ç–∞—Ç–µ–ª—å, –∏–Ω—Ç–µ–≥—Ä–∞—Ç–æ—Ä –∏ –∫–æ–º–ø–∞—Ä–∞—Ç–æ—Ä –î–°–ú –ù–∞ –Ω–µ–∏–Ω–≤–µ—Ä—Ç–∏—Ä—É—é—â–∏–π –≤—Ö–æ–¥ –û–Ý1 –ø–æ–¥–∞—ë—Ç—Å—è –≤—Ö–æ–¥–Ω–æ–µ –∞–Ω–∞–ª–æ–≥–æ–≤–æ–µ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ, –Ω–∞ R3 ‚Äî —Å–∏–≥–Ω–∞–ª —Å –≤—ã—Ö–æ–¥–∞ –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞, –∞ —Å–∏–≥–Ω–∞–ª —Å D1 –∏ R6 –∑–∞–≤–æ–¥–∏—Ç—Å—è –≤ –ú–ö. –î–ª—è –¥–µ–º–æ–Ω—Å—Ç—Ä–∞—Ü–∏–∏ —Ç–æ–≥–æ, –∫–∞–∫ –¥–æ–ª–∂–µ–Ω —Ä–∞–±–æ—Ç–∞—Ç—å –º–æ–¥—É–ª—è—Ç–æ—Ä, —è –Ω–∞–±—Ä–æ—Å–∞–ª –µ–≥–æ –±–ª–æ–∫-—Å—Ö–µ–º—É (—Ä–∏—Å.6) –≤ –ø–∞–∫–µ—Ç–µ Simulink –ø—Ä–æ–≥—Ä–∞–º–º—ã Matlab.
–Ý–∏—Å.6. –ë–ª–æ–∫-—Å—Ö–µ–º–∞ –î–°–ú –≤ –ø—Ä–æ–≥—Ä–∞–º–º–µ Simulink –ù–∞–∑–Ω–∞—á–µ–Ω–∏–µ –±–ª–æ–∫–æ–≤ —Å—Ö–µ–º—ã, –∏–∑–æ–±—Ä–∞–∂—ë–Ω–Ω–æ–π –Ω–∞ —Ä–∏—Å—É–Ω–∫–µ 6, —Å–ª–µ–≤–∞ –Ω–∞–ø—Ä–∞–≤–æ: Ramp –∏ Quantizer ‚Äî –∏—Å—Ç–æ—á–Ω–∏–∫ –ª–∏–Ω–µ–π–Ω–æ –Ω–∞—Ä–∞—Å—Ç–∞—é—â–µ–≥–æ —Å–∏–≥–Ω–∞–ª–∞ –∏ –∫–≤–∞–Ω—Ç–æ–≤–∞—Ç–µ–ª—å —è–≤–ª—è—é—Ç—Å—è –∏—Å—Ç–æ—á–Ω–∏–∫–æ–º –≤—Ö–æ–¥–Ω–æ–≥–æ —Å–∏–≥–Ω–∞–ª–∞ ¬´–ª–µ—Å–µ–Ω–∫–∞¬ª; —Å—É–º–º–∞—Ç–æ—Ä/–≤—ã—á–∏—Ç–∞—Ç–µ–ª—å (–û–Ý2 –Ω–∞ —Ä–∏—Å.5); Gain1 –∏ Integrator‚Äî –∏–Ω—Ç–µ–≥—Ä–∞—Ç–æ—Ä (–û–Ý3 –Ω–∞ —Ä–∏—Å.5, —Å –ø–æ–º–æ—â—å—é —É—Å–∏–ª–∏—Ç–µ–ª—è Gain1 –∑–∞–¥–∞—ë—Ç—Å—è –ø–æ—Å—Ç–æ—è–Ω–Ω–∞—è –≤—Ä–µ–º–µ–Ω–∏ –∏–Ω—Ç–µ–≥—Ä–∏—Ä–æ–≤–∞–Ω–∏—è R5¬∑–°1); Sign ‚Äî –∫–æ–º–ø–∞—Ä–∞—Ç–æ—Ä (–û–Ý4 –Ω–∞ —Ä–∏—Å.5); Saturation ‚Äî –æ–≥—Ä–∞–Ω–∏—á–∏—Ç–µ–ª—å (–æ—Ç—Ä–∏—Ü–∞—Ç–µ–ª—å–Ω–æ–≥–æ) —Å–∏–≥–Ω–∞–ª–∞ (–Ω–∞ —Ä–∏—Å.5 –µ–≥–æ —Ä–æ–ª—å –≤—ã–ø–æ–ª–Ω—è–µ—Ç –¥–∏–æ–¥ D1); Gain2 ‚Äî —É—Å–∏–ª–∏—Ç–µ–ª—å, –¥–ª—è –Ω–∞–≥–ª—è–¥–Ω–æ—Å—Ç–∏ –º–∞—Å—à—Ç–∞–±–∏—Ä—É–µ—Ç —Å–∏–≥–Ω–∞–ª; Zero-Order Hold ‚Äî —É—Å—Ç—Ä–æ–π—Å—Ç–≤–æ –≤—ã–±–æ—Ä–∫–∏-—Ö—Ä–∞–Ω–µ–Ω–∏—è, —Å–æ–≤–º–µ—Å—Ç–Ω–æ —Å –∫–æ–º–ø–∞—Ä–∞—Ç–æ—Ä–æ–º Sign –æ–±—Ä–∞–∑—É—é—Ç ¬´—Ç–∞–∫—Ç–∏—Ä—É–µ–º—ã–π –∫–æ–º–ø–∞—Ä–∞—Ç–æ—Ĭª (–æ–¥–Ω–∞–∫–æ —Ç–∞–∫—Ç–æ–≤–æ–≥–æ –≤—Ö–æ–¥–∞ –∫–∞–∫ —Ç–∞–∫–æ–≤–æ–≥–æ —É –Ω–µ–≥–æ –Ω–µ—Ç, —Å—á–∏—Ç–∞–µ–º —á—Ç–æ –æ–Ω —Ä–∞–±–æ—Ç–∞–µ—Ç –Ω–∞ –æ–¥–Ω–æ–π –æ–ø—Ä–µ–¥–µ–ª—ë–Ω–Ω–æ–π —á–∞—Å—Ç–æ—Ç–µ), –µ–≥–æ —Ä–æ–ª—å –±—É–¥–µ—Ç –≤—ã–ø–æ–ª–Ω—è—Ç—å –ú–ö. –î–ª—è –Ω–∞–±–ª—é–¥–µ–Ω–∏—è –∑–∞ —Å–∏–≥–Ω–∞–ª–∞–º–∏ –ø–æ–¥–∫–ª—é—á–µ–Ω –≤–∏—Ä—Ç—É–∞–ª—å–Ω—ã–π —Ç—Ä—ë—Ö–∫–∞–Ω–∞–ª—å–Ω—ã–π –æ—Å—Ü–∏–ª–ª–æ–≥—Ä–∞—Ñ Scope, –µ–≥–æ –æ—Å—Ü–∏–ª–ª–æ–≥—Ä–∞–º–º–∞ –ø—Ä–∏–≤–µ–¥–µ–Ω–∞ –Ω–∞ —Ä–∏—Å—É–Ω–∫–µ 7.
–Ý–∏—Å.7. –û—Å—Ü–∏–ª–ª–æ–≥—Ä–∞–º–º–∞ —Ä–∞–±–æ—Ç—ã —Å—Ö–µ–º—ã, –∏–∑–æ–±—Ä–∞–∂—ë–Ω–Ω–æ–π –Ω–∞ —Ä–∏—Å.6 ¬Ý–ü–µ—Ä–≤—ã–π –∫–∞–Ω–∞–ª –ø–æ–∫–∞–∑—ã–≤–∞–µ—Ç —Å—Ç—É–ø–µ–Ω—á–∞—Ç–æ –Ω–∞—Ä–∞—Å—Ç–∞—é—â–∏–π –≤—Ö–æ–¥–Ω–æ–π —Å–∏–≥–Ω–∞–ª, –Ω–∞ –≤—Ç–æ—Ä–æ–π –∫–∞–Ω–∞–ª –∑–∞–≤–æ–¥–∏—Ç—Å—è —Å–∏–≥–Ω–∞–ª —Å –≤—ã—Ö–æ–¥–∞ –∏–Ω—Ç–µ–≥—Ä–∞—Ç–æ—Ä–∞, –∞ –Ω–∞ —Ç—Ä–µ—Ç–∏–π ‚Äî —Å –≤—ã—Ö–æ–¥–∞ –º–æ–¥—É–ª—è—Ç–æ—Ä–∞. –ò–∑ —Ä–∏—Å—É–Ω–∫–∞ –≤–∏–¥–Ω–æ, —á—Ç–æ –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ–µ (–ø–æ –∞–±—Å–æ–ª—é—Ç–Ω–æ–º—É –∑–Ω–∞—á–µ–Ω–∏—é) –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ –Ω–∞ –≤—ã—Ö–æ–¥–µ –∏–Ω—Ç–µ–≥—Ä–∞—Ç–æ—Ä–∞ –ø–æ—è–≤–ª—è–µ—Ç—Å—è –ø—Ä–∏ –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ–º/–º–∏–Ω–∏–º–∞–ª—å–Ω–æ–º –≤—Ö–æ–¥–Ω–æ–º –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–∏, —Ç.–∫. –≤ —ç—Ç–æ–º —Å–ª—É—á–∞–µ –Ω–∞ –≤—Ö–æ–¥–µ –∏–Ω—Ç–µ–≥—Ä–∞—Ç–æ—Ä–∞ –ø—Ä–∏—Å—É—Ç—Å—Ç–≤—É–µ—Ç –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ ¬±U–æ–ø. –ò–Ω—Ç–µ–≥—Ä–∞—Ç–æ—Ä –±—É–¥–µ—Ç —Ä–∞–±–æ—Ç–∞—Ç—å –≤ –ª–∏–Ω–µ–π–Ω–æ–º —Ä–µ–∂–∏–º–µ, –µ—Å–ª–∏ –≤ —Ç–µ—á–µ–Ω–∏–µ –æ–¥–Ω–æ–≥–æ —Ç–∞–∫—Ç–∞ –î–°–ú –ø—Ä–∏ –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ–º –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–∏ –Ω–∞ –≤—Ö–æ–¥–µ, –Ω–∞ –≤—ã—Ö–æ–¥–µ –æ–Ω–æ –Ω–µ –ø—Ä–µ–≤—ã—Å–∏—Ç –ø–∞—Å–ø–æ—Ä—Ç–Ω–æ–µ –∑–Ω–∞—á–µ–Ω–∏–µ –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ –≤–æ–∑–º–æ–∂–Ω–æ–≥–æ –≤—ã—Ö–æ–¥–Ω–æ–≥–æ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏—è –æ–ø–µ—Ä–∞—Ü–∏–æ–Ω–Ω–æ–≥–æ —É—Å–∏–ª–∏—Ç–µ–ª—è Umax (–û–Ý3 –Ω–∞ —Ä–∏—Å.5). –î—Ä—É–≥–∏–º–∏ —Å–ª–æ–≤–∞–º–∏, –∫—Ä–∏—Ç–µ—Ä–∏–µ–º –≤—ã–±–æ—Ä–∞ –°1 (–Ω–∞ —Ä–∏—Å.5) —è–≤–ª—è–µ—Ç—Å—è –≤—ã–ø–æ–ª–Ω–µ–Ω–∏–µ –Ω–µ—Ä–∞–≤–µ–Ω—Å—Ç–≤–∞
, –≥–¥–µ –¢–¥—Å–º ‚Äî –¥–ª–∏—Ç–µ–ª—å–Ω–æ—Å—Ç—å –æ–¥–Ω–æ–≥–æ —Ç–∞–∫—Ç–∞ –º–æ–¥—É–ª—è—Ç–æ—Ä–∞ (–¢–¥—Å–º = 1/f—Ç–∞–∫—Ç = 1/Fs). –ü—Ä–∏ —ç—Ç–æ–º –Ω–µ —Å–ª–µ–¥—É–µ—Ç –±—Ä–∞—Ç—å –°1 –Ω–∞–º–Ω–æ–≥–æ –±–û–ª—å—à–∏–º, —Ç.–∫. –ø—Ä–∏ —ç—Ç–æ–º —É–≤–µ–ª–∏—á–∏–≤–∞–µ—Ç—Å—è –ø–æ—Å—Ç–æ—è–Ω–Ω–∞—è –∏–Ω—Ç–µ–≥—Ä–∏—Ä–æ–≤–∞–Ω–∏—è, –∏ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ –Ω–∞ –≤—ã—Ö–æ–¥–µ –∏–Ω—Ç–µ–≥—Ä–∞—Ç–æ—Ä–∞ –±—É–¥–µ—Ç –∫–æ–ª–µ–±–∞—Ç—å—Å—è –≤ —Ä–∞–π–æ–Ω–µ –Ω—É–ª—è —Å –º–∞–ª–µ–Ω—å–∫–æ–π –∞–º–ø–ª–∏—Ç—É–¥–æ–π. –ö–∞–∫ —Å–ª–µ–¥—Å—Ç–≤–∏–µ, —Å–∏–ª—å–Ω–µ–µ –±—É–¥—É—Ç –ø—Ä–æ—è–≤–ª—è—Ç—å—Å—è –Ω–µ–∏–¥–µ–∞–ª—å–Ω–æ—Å—Ç–∏ –û–£: –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ —Å–º–µ—â–µ–Ω–∏—è, –≤—Ö–æ–¥–Ω—ã–µ —Ç–æ–∫–∏ —Å–º–µ—â–µ–Ω–∏—è –∏ –∏—Ö —Ä–∞–∑–Ω–æ—Å—Ç—å –∏ —Ç.–ø. –ù–∞ –º–æ–π –≤–∑–≥–ª—è–¥, –°1 —Å–ª–µ–¥—É–µ—Ç –≤—ã–±—Ä–∞—Ç—å —Ç–∞–∫–∏–º, —á—Ç–æ–±—ã –∑–∞ –æ–¥–∏–Ω —Ç–∞–∫—Ç –º–æ–¥—É–ª—è—Ç–æ—Ä–∞ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ –Ω–∞ –≤—ã—Ö–æ–¥–µ –∏–Ω—Ç–µ–≥—Ä–∞—Ç–æ—Ä–∞ –Ω–∞—Ä–∞—Å—Ç–∞–ª–æ –Ω–∞ 85‚Ķ95% –æ—Ç Umax. ¬Ý–°–∏–≥–Ω–∞–ª –Ω–∞ –≤—ã—Ö–æ–¥–µ –º–æ–¥—É–ª—è—Ç–æ—Ä–∞ —á–µ–º-—Ç–æ –ø–æ—Ö–æ–∂ –Ω–∞ —Ä–µ–∑—É–ª—å—Ç–∞—Ç —à–∏—Ä–æ—Ç–Ω–æ-–∏–º–ø—É–ª—å—Å–Ω–æ–π –º–æ–¥—É–ª—è—Ü–∏–∏ (–®–ò–ú), –Ω–æ —Å —à–∏—Ä–∏–Ω–æ–π –∏–º–ø—É–ª—å—Å–∞ –∫—Ä–∞—Ç–Ω–æ–π –¥–ª–∏—Ç–µ–ª—å–Ω–æ—Å—Ç–∏ –æ–¥–Ω–æ–≥–æ —Ç–∞–∫—Ç–æ–≤–æ–≥–æ –∏–º–ø—É–ª—å—Å–∞. –û–ø–æ—Ä–Ω–æ–µ ¬´–Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ¬ª —Å—Ö–µ–º—ã, –∏–∑–æ–±—Ä–∞–∂—ë–Ω–Ω–æ–π –Ω–∞ —Ä–∏—Å.6 (–¥–ª—è –Ω–∞–≥–ª—è–¥–Ω–æ—Å—Ç–∏ –Ω–∞–∑–æ–≤—ë–º —Å–∏–≥–Ω–∞–ª –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ–º, –æ–¥–Ω–∞–∫–æ —Å–∞–º–∞ –º–æ–¥–µ–ª—å –∏–Ω–≤–∞—Ä–∏–∞–Ω—Ç–Ω–∞ –∫ –ø—Ä–∏—Ä–æ–¥–µ —Å–∏–≥–Ω–∞–ª–∞: –æ–Ω –º–æ–∂–µ—Ç –±—ã—Ç—å –¥–∞–∂–µ —Ü–∏—Ñ—Ä–æ–≤—ã–º) —Ä–∞–≤–Ω–æ 5 –í, –ø–µ—Ä–≤–∞—è —Å—Ç—É–ø–µ–Ω—å–∫–∞ –∏–º–µ–µ—Ç –≤–µ–ª–∏—á–∏–Ω—É 1 –í, —Ç.–µ. –≤—Ö–æ–¥–Ω–æ–π —Å–∏–≥–Ω–∞–ª —Ä–∞–≤–µ–Ω 1/5¬∑U–æ–ø. –¢–∞–∫–æ–µ –ø—Ä–æ—Å—Ç–æ–µ —Å–æ–æ—Ç–Ω–æ—à–µ–Ω–∏–µ –ø—Ä–∏–≤–æ–¥–∏—Ç –∫ —Ç–æ–º—É, —á—Ç–æ —á–µ—Ç—ã—Ä–µ —Ç–∞–∫—Ç–∞ –º–æ–¥—É–ª—è—Ç–æ—Ä –≤—ã–¥–∞—ë—Ç ¬´0¬ª, –∏ –∫–∞–∂–¥—ã–π –ø—è—Ç—ã–π —Ç–∞–∫—Ç ¬´1¬ª. –° —Ç–æ—á–Ω–æ—Å—Ç—å—é, –¥–∞ –Ω–∞–æ–±–æ—Ä–æ—Ç –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç –∫–æ–≥–¥–∞ –≤—ã—Ö–æ–¥–Ω–æ–π —Å–∏–≥–Ω–∞–ª —Ä–∞–≤–µ–Ω 4 –í, —Ç.–µ. 4/5¬∑U–æ–ø. –í —ç—Ç–∏—Ö –¥–≤—É—Ö —Å–ª—É—á–∞—è—Ö –æ—Ç–ª–∏—á–∏–π –æ—Ç –∫–ª–∞—Å—Å–∏—á–µ—Å–∫–æ–π –®–ò–ú –Ω–µ—Ç. –ö–æ–≥–¥–∞ –Ω–∞ –≤—Ö–æ–¥–µ 2 –∏–ª–∏ 3 –≤–æ–ª—å—Ç–∞, –Ω–∞ –≤—ã—Ö–æ–¥–µ –º–æ–¥—É–ª—è—Ç–æ—Ä–∞ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–µ–Ω–Ω–æ –¥–≤–µ –∏–ª–∏ —Ç—Ä–∏ ¬´1¬ª –∏–∑ –ª—é–±—ã—Ö –ø—è—Ç–∏ –±–∏—Ç (–∏–¥—É—â–∏—Ö –ø–æ–¥—Ä—è–¥ —Ç–∞–∫—Ç–æ–≤). –ù–æ! –û–±—Ä–∞—Ç–∏—Ç–µ –≤–Ω–∏–º–∞–Ω–∏–µ: –æ–Ω–∏ –ø–æ –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç–∏ —á–µ—Ä–µ–¥—É—é—Ç—Å—è —Å –Ω—É–ª—è–º–∏, –≤ —Ç–æ –≤—Ä–µ–º—è –∫–∞–∫ –æ–±—ã—á–Ω–∞—è –®–ò–ú –¥–∞–ª–∞ –±—ã –ø–æ—Å–ª–µ–¥–æ–≤–∞—Ç–µ–ª—å–Ω–æ—Å—Ç–∏ ¬´11000¬ª –∏ ¬´11100¬ª —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–µ–Ω–Ω–æ. –î—Ä—É–≥–∏–º–∏ —Å–ª–æ–≤–∞–º–∏, –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç –±–æ–ª—å—à–µ –ø–µ—Ä–µ–∫–ª—é—á–µ–Ω–∏–π –º–µ–∂–¥—É ¬´0¬ª –∏ ¬´1¬ª, —Ç.–µ. –≤—ã—Ö–æ–¥–Ω–æ–π —Å–∏–≥–Ω–∞–ª –º–æ–¥—É–ª—è—Ç–æ—Ä–∞ —Å–æ–¥–µ—Ä–∂–∏—Ç –±–æ–ª—å—à–µ –≤—ã—Å–æ–∫–æ—á–∞—Å—Ç–æ—Ç–Ω—ã—Ö —Å–æ—Å—Ç–∞–≤–ª—è—é—â–∏—Ö, –∫–æ—Ç–æ—Ä—ã–µ –ª–µ–≥—á–µ –æ—Ç—Ñ–∏–ª—å—Ç—Ä–æ–≤–∞—Ç—å! –ì–æ–≤–æ—Ä—è —É–º–Ω—ã–º —è–∑—ã–∫–æ–º, –ø—Ä–∏–º–µ–Ω–µ–Ω–∏–µ —Ç–∞–∫–æ–π —Å—Ç—Ä—É–∫—Ç—É—Ä—ã –º–æ–¥—É–ª—è—Ç–æ—Ä–∞ –ø—Ä–∏–≤–æ–¥–∏—Ç –∫ –ø–æ—è–≤–ª–µ–Ω–∏—é —Ç.–Ω. —ç—Ñ—Ñ–µ–∫—Ç–∞ –≤—ã—Ç–µ—Å–Ω–µ–Ω–∏—è —à—É–º–∞ –∫–≤–∞–Ω—Ç–æ–≤–∞–Ω–∏—è –≤ –æ–±–ª–∞—Å—Ç—å –≤—ã—Å–æ–∫–∏—Ö —á–∞—Å—Ç–æ—Ç. –í –∫–∞—á–µ—Å—Ç–≤–µ –ø—Ä–∏–º–µ—Ä–∞ –Ω–∞ —Ä–∏—Å.8 –ø–æ–∫–∞–∑–∞–Ω–∞ –æ—Ü–µ–Ω–∫–∞ —Å–ø–µ–∫—Ç—Ä–∞–ª—å–Ω–æ–π –ø–ª–æ—Ç–Ω–æ—Å—Ç–∏ —Å—Ä–µ–¥–Ω–µ–π –º–æ—â–Ω–æ—Å—Ç–∏ (–°–ü–°–ú) —Å–∏–≥–Ω–∞–ª–∞ –æ–¥–Ω–æ—Ä–∞–∑—Ä—è–¥–Ω–æ–≥–æ –î–°–ú –≤—Ç–æ—Ä–æ–≥–æ –ø–æ—Ä—è–¥–∫–∞, –∏–º–µ—é—â–µ–≥–æ —Ç–∞–∫—Ç–æ–≤—É—é —á–∞—Å—Ç–æ—Ç—É 100 –ú–ì—Ü, –ø—Ä–∏ —á–∞—Å—Ç–æ—Ç–µ –≤—Ö–æ–¥–Ω–æ–≥–æ —Å–∏–≥–Ω–∞–ª–∞ 24,4 –∫–ì—Ü (–¥–ª–∏—Ç–µ–ª—å–Ω–æ—Å—Ç—å –≤—ã–±–æ—Ä–∫–∏ 2^20) [2]. –°–æ–ø–æ—Å—Ç–∞–≤–ª—è—è –¥–≤–µ —ç—Ç–∏ —Ü–∏—Ñ—Ä—ã: —Ç–∞–∫—Ç–æ–≤—É—é 100 –ú–ì—Ü (!) –∏ —Å–∏–≥–Ω–∞–ª ¬´–≤—Å–µ–≥–æ –ª–∏—à—嬪 24 –∫–ì—Ü, –º–æ–∂–Ω–æ –∑–∞–∫–∞—Ç–∞—Ç—å –≥—É–±—É –Ω–∞ —Ç–æ, —á—Ç–æ –≤ –∏—Ç–æ–≥–µ –º—ã –ø–æ–ª—É—á–∏–º —Ç–æ—á–Ω—ã–π –∏ –ø—Ä–∏ —ç—Ç–æ–º –±—ã—Å—Ç—Ä—ã–π –ê–¶–ü.
–Ý–∏—Å.8. –°–ü–°–ú –≤—ã—Ö–æ–¥–Ω–æ–≥–æ —Å–∏–≥–Ω–∞–ª–∞ –î–° –º–æ–¥—É–ª—è—Ç–æ—Ä–∞ –∏ –ò–ö–ú –ê–¶–ü —Ç–æ–π –∂–µ —Ä–∞–∑—Ä—è–¥–Ω–æ—Å—Ç–∏ –í–∏–¥–Ω–æ, —á—Ç–æ –≤ –æ—Ç–ª–∏—á–∏–µ –æ—Ç –∏–º–ø—É–ª—å—Å–Ω–æ-–∫–æ–¥–æ–≤—ã—Ö –ê–¶–ü (–ò–ö–ú –ê–¶–ü), –°–ü–°–ú —à—É–º–∞ –∫–≤–∞–Ω—Ç–æ–≤–∞–Ω–∏—è –Ω–æ—Å–∏—Ç –Ω–µ —Ä–∞–≤–Ω–æ–º–µ—Ä–Ω—ã–π —Ö–∞—Ä–∞–∫—Ç–µ—Ä, –∞ —É–≤–µ–ª–∏—á–∏–≤–∞–µ—Ç—Å—è —Å —Ä–æ—Å—Ç–æ–º —á–∞—Å—Ç–æ—Ç—ã. –ü—Ä–∏ —ç—Ç–æ–º –≤ –Ω–∏–∑–∫–æ—á–∞—Å—Ç–æ—Ç–Ω–æ–π –æ–±–ª–∞—Å—Ç–∏ —Å–ø–µ–∫—Ç—Ä–∞ –°–ü–°–ú —à—É–º–∞ –∫–≤–∞–Ω—Ç–æ–≤–∞–Ω–∏—è –∑–Ω–∞—á–∏—Ç–µ–ª—å–Ω–æ –Ω–∏–∂–µ, —á–µ–º —É –∏–º–ø—É–ª—å—Å–Ω–æ-–∫–æ–¥–æ–≤—ã—Ö –ê–¶–ü —Å —Ç–æ–π –∂–µ —Ä–∞–∑—Ä—è–¥–Ω–æ—Å—Ç—å—é –∏ —á–∞—Å—Ç–æ—Ç–æ–π –¥–∏—Å–∫—Ä–µ—Ç–∏–∑–∞—Ü–∏–∏. –ü–æ–¥–∞–≤–ª—è—è –≤—ã—Å–æ–∫–æ—á–∞—Å—Ç–æ—Ç–Ω—ã–µ –∫–æ–º–ø–æ–Ω–µ–Ω—Ç—ã —à—É–º–∞ –∫–≤–∞–Ω—Ç–æ–≤–∞–Ω–∏—è —Å –ø–æ–º–æ—â—å—é –§–ù–ß, –º–æ–∂–Ω–æ –ø–æ–ª—É—á–∏—Ç—å –Ω–∞ –≤—ã—Ö–æ–¥–µ –ê–¶–ü —Ü–∏—Ñ—Ä–æ–≤–æ–π —Å–∏–≥–Ω–∞–ª —Å –≤—ã—Å–æ–∫–∏–º –æ—Ç–Ω–æ—à–µ–Ω–∏–µ–º —Å–∏–≥–Ω–∞–ª/—à—É–º, —Ç.–µ. —Å –≤—ã—Å–æ–∫–æ–π —Ä–∞–∑—Ä—è–¥–Ω–æ—Å—Ç—å—é. –ò—Ç–∞–∫, –Ω–∞–º –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ —Ä–µ–∞–ª–∏–∑–æ–≤–∞—Ç—å —Ü–∏—Ñ—Ä–æ–≤–æ–π –¥–µ—Ü–∏–º–∏—Ä—É—é—â–∏–π —Ñ–∏–ª—å—Ç—Ä. Tiny2313 —è–≤–ª—è–µ—Ç—Å—è ¬´–≤—Å–µ–≥–æ –ª–∏—à—嬪 8-–º–∏ —Ä–∞–∑—Ä—è–¥–Ω—ã–º –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–æ–º —Å —Å–æ–∫—Ä–∞—â—ë–Ω–Ω—ã–º –Ω–∞–±–æ—Ä–æ–º –∫–æ–º–∞–Ω–¥ (–ø–æ-–±—É—Ä–∂—É–π—Å–∫–∏ RISC) [6], —Ç.–µ. –¥–∞–ª–µ–∫–æ –Ω–µ —Ü–∏—Ñ—Ä–æ–≤–æ–π —Å–∏–≥–Ω–∞–ª—å–Ω—ã–π –ø—Ä–æ—Ü–µ—Å—Å–æ—Ä (DSP), —É –∫–æ—Ç–æ—Ä–æ–≥–æ —É–∂–µ –µ—Å—Ç—å –Ω–∞–±–æ—Ä –≥–æ—Ç–æ–≤—ã—Ö –∫–æ–º–∞–Ω–¥ –¥–ª—è —Ü–∏—Ñ—Ä–æ–≤–æ–π —Ñ–∏–ª—å—Ç—Ä–∞—Ü–∏–∏. –¢–∞–∫ —á—Ç–æ –ø—Ä–∏–¥—ë—Ç—Å—è –Ω–µ–º–Ω–æ–≥–æ –ø–æ–∏–∑–≥–∞–ª—è—Ç—å—Å—è. –§–∏–ª—å—Ç—Ä —Ä–∞–±–æ—Ç–∞–µ—Ç –Ω–∞ —Ç–∞–∫—Ç–æ–≤–æ–π —á–∞—Å—Ç–æ—Ç–µ –º–æ–¥—É–ª—è—Ç–æ—Ä–∞, –ø–æ—ç—Ç–æ–º—É –æ–Ω –¥–æ–ª–∂–µ–Ω –æ–±–ª–∞–¥–∞—Ç—å –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ –ø—Ä–æ—Å—Ç–æ–π —Å—Ç—Ä—É–∫—Ç—É—Ä–æ–π, —Ç–∞–∫ —á—Ç–æ —Ä–µ–∞–ª–∏–∑—É–µ–º –§–ù–ß —Å –∫–æ–Ω–µ—á–Ω–æ–π –∏–º–ø—É–ª—å—Å–Ω–æ–π —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫–æ–π (–ö–ò–•). –û–¥–Ω–∏–º –∏–∑ –≤–æ–∑–º–æ–∂–Ω—ã—Ö —Ä–µ—à–µ–Ω–∏–π —è–≤–ª—è–µ—Ç—Å—è —Ä–µ—à–µ–Ω–∏–µ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –§–ù–ß, –Ω–µ –∏–º–µ—é—â–∏–π –≤ —Å–≤–æ–µ–º —Å–æ—Å—Ç–∞–≤–µ —É–º–Ω–æ–∂–∏—Ç–µ–ª–µ–π, —Ç–∞–∫–æ–π —Ç–∏–ø —Ñ–∏–ª—å—Ç—Ä –≤ –∞–Ω–≥–ª–æ—è–∑—ã—á–Ω–æ–π –ª–∏—Ç–µ—Ä–∞—Ç—É—Ä–µ –ø–æ–ª—É—á–∏–ª –Ω–∞–∑–≤–∞–Ω–∏–µ sinc-—Ñ–∏–ª—å—Ç—Ä–æ–≤, –ø–æ—Å–∫–æ–ª—å–∫—É –ê–ß–• —Ñ–∏–ª—å—Ç—Ä–∞ –ø—Ä–æ–ø–æ—Ä—Ü–∏–æ–Ω–∞–ª—å–Ω–∞ sin(ωt)/ωt:
(1). –ü–µ—Ä–µ–¥–∞—Ç–æ—á–Ω–∞—è —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫–∞ —Ñ–∏–ª—å—Ç—Ä–∞ –≤ Z-–æ–±–ª–∞—Å—Ç–∏:
(2). Хотел написать что-то вроде «из (2) видно, что»… Но, думаю, видно будет далеко не многим. Если попробовать объяснить в двух словах, то z^(-i) — это входной сигнал, задержанный на i тактов. Т.е. нам необходимо просуммировать М значений сигнала, задержанного на 0, 1, …, N-2, N-1 тактов. В классической аппаратной реализации это делается с помощью подобия последовательно-параллельного регистра сдвига и сумматора (см. рис.9).
–Ý–∏—Å.9. –°—Ç—Ä—É–∫—Ç—É—Ä–Ω–∞—è —Å—Ö–µ–º–∞ sinc-—Ñ–∏–ª—å—Ç—Ä–∞ –í –æ–±—â–µ–º —Å–ª—É—á–∞–µ, –≤—ã—Ö–æ–¥–Ω–æ–π —Å–∏–≥–Ω–∞–ª Y[n] –º–µ–Ω—è–µ—Ç—Å—è —Å –∫–∞–∂–¥—ã–º —Ç–∞–∫—Ç–æ–º –≤—Ö–æ–¥–Ω–æ–≥–æ. –û—á–µ–≤–∏–¥–Ω–æ, —á—Ç–æ —Ä–∞–∑—Ä—è–¥–Ω–æ—Å—Ç—å Y[n] –≤—ã—à–µ, —á–µ–º X[n]. –ü—Ä–∏–º–µ–Ω–∏—Ç–µ–ª—å–Ω–æ –∫ –Ω–∞—à–µ–º—É —Å–ª—É—á–∞—é, —Ä–∞–∑—Ä—è–¥–Ω–æ—Å—Ç—å –≤—Ö–æ–¥–Ω–æ–≥–æ —Å–∏–≥–Ω–∞–ª–∞ (—Å –≤—ã—Ö–æ–¥–∞ –î–°–ú) —Ä–∞–≤–Ω–∞ –µ–¥–∏–Ω–∏—Ü–µ. –ú–∞–∫—Å–∏–º–∞–ª—å–Ω—ã–π –≤—ã—Ö–æ–¥–Ω–æ–π —Å–∏–≥–Ω–∞–ª –±—É–¥–µ—Ç –≤ —Ç–æ–º —Å–ª—É—á–∞–µ, –∫–æ–≥–¥–∞ –Ω–∞ –≤—Ö–æ–¥–µ –±—É–¥–µ—Ç –ø–æ—Å–ª–µ–¥–æ–≤–∞—Ç–µ–ª—å–Ω–æ—Å—Ç—å –µ–¥–∏–Ω–∏—Ü. –ü—Ä–∏ —ç—Ç–æ–º –≤ —Å—É–º–º–∞—Ç–æ—Ä–µ –±—É–¥–µ—Ç —á–∏—Å–ª–æ N, –¥–ª—è –ø—Ä–µ–¥—Å—Ç–∞–≤–ª–µ–Ω–∏—è –∫–æ—Ç–æ—Ä–æ–≥–æ –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ L —Ä–∞–∑—Ä—è–¥–æ–≤ (2^L > N). –Ý–µ–∞–ª–∏–∑–æ–≤–∞—Ç—å —Ç–∞–∫–æ–π —Ñ–∏–ª—å—Ç—Ä –≤—ã—Å–æ–∫–æ–≥–æ –ø–æ—Ä—è–¥–∫–∞ –Ω–µ–ø–æ—Å—Ä–µ–¥—Å—Ç–≤–µ–Ω–Ω–æ –≤ –ú–ö –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ –ø—Ä–æ–±–ª–µ–º–∞—Ç–∏—á–Ω–æ. –û–¥–Ω–∞–∫–æ –µ—Å–ª–∏ –≤—Å–ø–æ–º–Ω–∏—Ç—å, —á—Ç–æ —Å–ª–µ–¥–æ–º –∑–∞ —Ñ–∏–ª—å—Ç—Ä–æ–º —É –Ω–∞—Å –∏–¥—ë—Ç –¥–µ—Ü–∏–º–∞—Ç–æ—Ä, —Ç–æ –≤—Å—ë –∑–Ω–∞—á–∏—Ç–µ–ª—å–Ω–æ —É–ø—Ä–æ—â–∞–µ—Ç—Å—è. –ï—Å–ª–∏ –∫–æ—ç—Ñ—Ñ–∏—Ü–∏–µ–Ω—Ç –¥–µ—Ü–∏–º–∞—Ü–∏–∏ –ú —É –Ω–∞—Å –±—É–¥–µ—Ç —Ä–∞–≤–Ω—è—Ç—å—Å—è —á–∏—Å–ª—É –≤—Ö–æ–¥–æ–≤ —Å—É–º–º–∞—Ç–æ—Ä–∞ N, —Ç–æ –≤ –∫–∞—á–µ—Å—Ç–≤–µ —Å—É–º–º–∞—Ç–æ—Ä–∞ –º–æ–∂–Ω–æ –±—É–¥–µ—Ç –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –∞–∫–∫—É–º—É–ª—è—Ç–æ—Ä (—Ä–∏—Å.10)!
–Ý–∏—Å.10. –°—Ç—Ä—É–∫—Ç—É—Ä–Ω–∞—è —Å—Ö–µ–º–∞ –∞–∫–∫—É–º—É–ª—è—Ç–æ—Ä–∞ –Ý–µ–∞–ª–∏–∑–æ–≤–∞—Ç—å –∞–∫–∫—É–º—É–ª—è—Ç–æ—Ä –≤ –ú–ö –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ –ø—Ä–æ—Å—Ç–æ: –Ω–∞–¥–æ –ª–∏—à—å –ø—Ä–∏–±–∞–≤–ª—è—Ç—å –∑–Ω–∞—á–µ–Ω–∏–µ –≤—Ö–æ–¥–Ω–æ–≥–æ —Å–∏–≥–Ω–∞–ª–∞ –∫ —Å–æ–¥–µ—Ä–∂–∏–º–æ–º—É –∫–∞–∫–æ–≥–æ-–ª–∏–±–æ —Ä–µ–≥–∏—Å—Ç—Ä–∞. –ê –ø—Ä–æ—Ü–µ—Å—Å –¥–µ—Ü–∏–º–∞—Ü–∏–∏ –±—É–¥–µ—Ç –∑–∞–∫–ª—é—á–∞—Ç—å—Å—è –≤ —Ç–æ–º, —á—Ç–æ–±—ã –∫–∞–∂–¥—ã–µ –ú —Ç–∞–∫—Ç–æ–≤ (–ø–æ—Å–ª–µ –ø—Ä–∏—Ö–æ–¥–∞ –ú –±–∏—Ç) X[n] –≤—ã–¥–∞–≤–∞—Ç—å –∑–Ω–∞—á–µ–Ω–∏–µ Y[n] —Ä–∞–∑—Ä—è–¥–Ω–æ—Å—Ç–∏ L –∏ –æ–±–Ω—É–ª—è—Ç—å –∞–∫–∫—É–º—É–ª—è—Ç–æ—Ä. –ù–∞ —Ä–∏—Å—É–Ω–∫–µ 11 –ø–æ–∫–∞–∑–∞–Ω–∞ –∞–º–ø–ª–∏—Ç—É–¥–Ω–æ-—á–∞—Å—Ç–æ—Ç–Ω–∞—è —Ö–∞—Ä–∞–∫—Ç–µ—Ä–∏—Å—Ç–∏–∫–∞ (–ê–ß–•) —Ç–∞–∫–æ–≥–æ —Ñ–∏–ª—å—Ç—Ä–∞ –ø—Ä–∏ –ú = 65535 (MathCAD –ø–æ–¥–≤–∏—Å–∞–ª –ø–æ—á—Ç–∏ –Ω–∞ —Ç—Ä–∏ –º–∏–Ω—É—Ç—ã —á—Ç–æ–±—ã –ø–æ—Å—Ç—Ä–æ–∏—Ç—å —Ç–∞–∫–æ–µ).
–Ý–∏—Å.11. –ê–ß–• sinc-—Ñ–∏–ª—å—Ç—Ä–∞ –ø—Ä–∏ N = 65535 –ò—Ç–∞–∫, –≤—ã—Ä–∏—Å–æ–≤—ã–≤–∞–µ—Ç—Å—è —Å–ª–µ–¥—É—é—â–∏–π –∞–ª–≥–æ—Ä–∏—Ç–º —Ä–∞–±–æ—Ç—ã –ú–ö: 0) –∏–Ω–∏—Ü–∏–∞–ª–∏–∑–∞—Ü–∏—è; 1) —Å—á–∏—Ç—ã–≤–∞–µ–º –±–∏—Ç —Å –≤—ã—Ö–æ–¥–∞ –º–æ–¥—É–ª—è—Ç–æ—Ä–∞; 2) –ø–µ—Ä–µ–¥–∞—ë–º –µ–≥–æ –∑–Ω–∞—á–µ–Ω–∏–µ –Ω–∞ –≤—ã—Ö–æ–¥; 3) –ø—Ä–∏–±–∞–≤–ª—è–µ–º —ç—Ç–æ—Ç –±–∏—Ç –∫ –∑–Ω–∞—á–µ–Ω–∏—é –∞–∫–∫—É–º—É–ª—è—Ç–æ—Ä–∞; 4) —É–≤–µ–ª–∏—á–∏–≤–∞–µ–º –∑–Ω–∞—á–µ–Ω–∏–µ —Å—á—ë—Ç—á–∏–∫–∞; 5) –µ—Å–ª–∏ —Å—á—ë—Ç—á–∏–∫ –Ω–µ –¥–æ—Ç–∏–∫–∞–ª –¥–æ –ú, —Ç–æ –ø–µ—Ä–µ—Ö–æ–¥ –∫ –ø.1; 6) –ø–æ–ª—É—á–∏–ª–∏ —Ä–µ–∑—É–ª—å—Ç–∞—Ç –≤ –∞–∫–∫—É–º—É–ª—è—Ç–æ—Ä–µ. –ú–∏–Ω–∏–º–∞–ª—å–Ω–∞—è –∏–Ω–∏—Ü–∏–∞–ª–∏–∑–∞—Ü–∏—è –≤–∫–ª—é—á–∞–µ—Ç –≤ —Å–µ–±—è –æ–±–Ω—É–ª–µ–Ω–∏–µ –∞–∫–∫—É–º—É–ª—è—Ç–æ—Ä–∞ –∏ —Å—á—ë—Ç—á–∏–∫–∞. –ö–∞–∫ –≤–∏–¥–Ω–æ, –Ω–∞ –∫–∞–∂–¥—ã–π —Ç–∞–∫—Ç –º–æ–¥—É–ª—è—Ç–æ—Ä–∞ —É—Ö–æ–¥–∏—Ç –º–∏–Ω–∏–º—É–º 5 —Ç–∞–∫—Ç–æ–≤ –º–∏–∫—Ä–æ–∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–∞, –∞ –µ—Å–ª–∏ —É—á–µ—Å—Ç—å, —á—Ç–æ –Ω–µ–∫–æ—Ç–æ—Ä—ã–µ –∫–æ–º–∞–Ω–¥—ã –≤—ã–ø–æ–ª–Ω—è—é—Ç—Å—è –±–æ–ª–µ–µ –æ–¥–Ω–æ–≥–æ —Ç–∞–∫—Ç–∞, —Ç–æ –∏ –≤—Å–µ 10 (–¥–µ—Å—è—Ç—å)! –ü—Ä–∏ —Ç–∞–∫—Ç–æ–≤–æ–π —á–∞—Å—Ç–æ—Ç–µ –ú–ö 1 –ú–ì—Ü –Ω–∞ –Ω–∞–∫–æ–ø–ª–µ–Ω–∏–µ 65535 –æ—Ç—Å—á—ë—Ç–æ–≤ (—Ä–∞–∑ –ø—Ä–µ–∏–º—É—â–µ—Å—Ç–≤–æ–º –¥–µ–ª—å—Ç–∞-—Å–∏–≥–º–∞ –ê–¶–ü —è–≤–ª—è–µ—Ç—Å—è –ø–æ–≤—ã—à–µ–Ω–Ω–∞—è —Ç–æ—á–Ω–æ—Å—Ç—å, –ø–æ–ø—Ä–æ–±—É–µ–º –ø—Ä–æ–≤–µ—Ä–∏—Ç—å —Ç–∞–∫ –ª–∏ —ç—Ç–æ –∏ –ø–æ–ª—É—á–∏—Ç—å —Ä–∞–∑—Ä–µ—à–µ–Ω–∏–µ 16 –±–∏—Ç) —É –Ω–∞—Å —É–π–¥—ë—Ç –¥–≤–µ —Ç—Ä–µ—Ç–∏ —Å–µ–∫—É–Ω–¥—ã!!! –•–æ—Ç—è –¥–ª—è –≤–æ–ª—å—Ç–º–µ—Ç—Ä–∞ –ø–æ—Å—Ç–æ—è–Ω–Ω–æ–≥–æ —Ç–æ–∫–∞ –≤–ø–æ–ª–Ω–µ —Å–≥–æ–¥–∏—Ç—Å—è. –Ý–∞—Å—Å–º–æ—Ç—Ä–∏–º —Ç–µ–ø–µ—Ä—å –ø–æ–¥—Ä–æ–±–Ω–µ–π –∫–∞–∂–¥—ã–π –ø—É–Ω–∫—Ç, –æ—Ä–∏–µ–Ω—Ç–∏—Ä—É—è—Å—å –Ω–∞ –∞—Å—Å–µ–º–±–ª–µ—Ä AVR. –ë—É–¥–µ—Ç —Ä–∞—Å—Å–º–æ—Ç—Ä–µ–Ω –Ω–∞–∏–ª—É—á—à–∏–π —Å–ª—É—á–∞–π —Å —Ç–æ—á–∫–∏ –∑—Ä–µ–Ω–∏—è –±—ã—Å—Ç—Ä–æ–¥–µ–π—Å—Ç–≤–∏—è –∏ –∑–∞–Ω—è—Ç–æ—Å—Ç–∏ –ø–æ—Ä—Ç–æ–≤ –ú–ö: –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω—ã –Ý–ê0 –∏ –Ý–ê1 ATtiny2313. –ü–æ—Ä—Ç –ê —Ç—Ä—ë—Ö–±–∏—Ç–Ω—ã–π, –Ω–æ —Å—Ç–∞—Ä—à–∏–π –±–∏—Ç –∏—Å–ø–æ–ª—å–∑—É–µ—Ç—Å—è –≤ –∫–∞—á–µ—Å—Ç–≤–µ —Ä–µ—Å–µ—Ç–∞. –î–ª—è –æ—Å—Ç–∞–ª—å–Ω—ã—Ö —Å–ª—É—á–∞–µ–≤ –±—É–¥—É—Ç –¥–∞–Ω—ã —Ä–µ–∫–æ–º–µ–Ω–¥–∞—Ü–∏–∏, –∞ –∫–æ–¥ –∑–∞–∫–æ–º–º–µ–Ω—Ç–∏—Ä–æ–≤–∞–Ω. 0. –û–¥–∏–Ω —Ü–∏–∫–ª —Ä–∞–±–æ—Ç—ã 16-—Ç–∏ –±–∏—Ç–Ω–æ–≥–æ –ê–¶–ü –º–Ω–µ —É–¥–∞–ª–æ—Å—å –≤–ø–∏—Ö–Ω—É—Ç—å –≤ 9 —Ç–∞–∫—Ç–æ–≤ –ú–ö (—Ç–µ–æ—Ä–µ—Ç–∏—á–µ—Å–∫–∏, –º–æ–∂–Ω–æ —É–º–µ—Å—Ç–∏—Ç—å—Å—è –≤ 8). –ù–∞ —ç—Ç–æ —É –º–µ–Ω—è —É—à–ª–æ 6 —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤: –¥–≤–∞ –ø–æ–¥ —Ä–µ–∑—É–ª—å—Ç–∞—Ç, –¥–≤–∞ –¥–ª—è —Å—á—ë—Ç—á–∏–∫–∞, –æ–¥–∏–Ω –¥–ª—è –≤—ã—á–∏—Å–ª–µ–Ω–∏–π –∏ –æ–¥–∏–Ω ¬´–Ω—É–ª–µ–≤–æ–𬪠(–Ω–µ R0, –∞ –ø—Ä–æ—Å—Ç–æ –≤ –Ω—ë–º –≤—Å—ë –≤—Ä–µ–º—è –æ–¥–Ω–∏ –Ω—É–ª–∏, —Ç.–µ. 0b00000000). –°—á—ë—Ç—á–∏–∫ –¥–µ–∫—Ä–µ–º–µ–Ω—Ç–Ω—ã–π, —Ç.–µ. –∫–∞–∂–¥—ã–π —Ç–∞–∫—Ç –º–æ–¥—É–ª—è—Ç–æ—Ä–∞ —É–º–µ–Ω—å—à–∞–µ—Ç —Å–≤–æ—ë –∑–Ω–∞—á–µ–Ω–∏–µ. –î–ª—è —Å—á—ë—Ç—á–∏–∫–∞ –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ –≤—ã–±—Ä–∞—Ç—å –ø–∞—Ä—É —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ Rd+1:Rd, d={24, 26, 28, 30} (—Ç.–µ. —Ç–µ, –∫–æ—Ç–æ—Ä—ã–µ –ø–æ–ø–∞–¥–∞—é—Ç –ø–æ–¥ –¥–µ–π—Å—Ç–≤–∏–µ –∫–æ–º–∞–Ω–¥ ADIW –∏ SBIW). –Ø –≤—ã–±—Ä–∞–ª R24 –∏ R25 —á—Ç–æ–±—ã –Ω–µ –∑–∞–Ω–∏–º–∞—Ç—å —Ä–µ–≥–∏—Å—Ç—Ä—ã X, Y –∏ Z. –ü–∞—Ä–∞ —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ –ø–æ–¥ —Ä–µ–∑—É–ª—å—Ç–∞—Ç ‚Äî –ª—é–±–∞—è —Å–æ—Å–µ–¥–Ω—è—è. –ë—ã–ª–∞ –≤—ã–±—Ä–∞–Ω–∞ –ø–∞—Ä–∞ R20 –∏ R21. –î–ª—è ¬´–Ω—É–ª–µ–≤–æ–≥–欪 —Ä–µ–≥–∏—Å—Ç—Ä–∞ –ø–æ–¥–æ–π–¥—ë—Ç –ª—é–±–æ–π, –≤—ã–±—Ä–∞–Ω R0. –Ý–µ–≥–∏—Å—Ç—Ä –¥–ª—è –≤—ã—á–∏—Å–ª–µ–Ω–∏–π ‚Äî –ª—é–±–æ–π –∏–∑ 16-—Ç–∏ —Å—Ç–∞—Ä—à–∏—Ö —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ –æ–±—â–µ–≥–æ –Ω–∞–∑–Ω–∞—á–µ–Ω–∏—è (–Ý–û–ù), –≤—ã–±—Ä–∞–Ω R16. –ò—Ç–∞–∫, –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ –æ–±–Ω—É–ª–∏—Ç—å —Ç—Ä–∏ —Ä–µ–≥–∏—Å—Ç—Ä–∞ –∏ —É—Å—Ç–∞–Ω–æ–≤–∏—Ç—å –¥–≤–∞. –ß—Ç–æ–±—ã –Ω–µ –∑–∞–ø—É—Ç–∞—Ç—å—Å—è, –ø—Ä–∏—Å–≤–æ–∏–º –∏–º –∏–º–µ–Ω–∞. //–ø–æ–¥–∫–ª—é—á–∞–µ–º –∑–∞–≥–æ–ª–æ–≤–æ—á–Ω—ã–π —Ñ–∞–π–ª .include //–æ–±–∑—ã–≤–∞–µ–º —Ä–µ–≥–∏—Å—Ç—Ä—ã .def zeroreg = R0¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;–Ω—É–ª–µ–≤–æ–π —Ä–µ–≥–∏—Å—Ç—Ä .def tmp = R16¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;–¥–ª—è –≤—ã—á–∏—Å–ª–µ–Ω–∏–π .def resultL = R20¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;–º–ª–∞–¥—à–∏–π –±–∞–π—Ç —Ä–µ–∑—É–ª—å—Ç–∞—Ç–∞ .def resultH = R21¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;–∏ —Å—Ç–∞—Ä—à–∏–π .def countL = R24¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;–º–ª–∞–¥—à–∏–π –±–∞–π—Ç —Å—á—ë—Ç—á–∏–∫–∞ .def countH = R25¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;–∏ —Å—Ç–∞—Ä—à–∏–π //–Ω–∞—Å—Ç—Ä–∞–∏–≤–∞–µ–º –ø–æ—Ä—Ç—ã –≤–≤–æ–¥–∞-–≤—ã–≤–æ–¥–∞ SBI DDRA,0¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;–ø–æ—Ä—Ç–ê.0 –Ω–∞ –≤—ã—Ö–æ–¥ //CBI DDRA,1¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;–ø–æ —É–º–æ–ª—á–∞–Ω–∏—é –ø–æ—Ä—Ç–ê.1 –Ω–∞—Å—Ç—Ä–æ–µ–Ω –Ω–∞ –≤—Ö–æ–¥ //–∏—Ç–∞–∫, –ø–æ–µ—Ö–∞–ª–∏! ADC_start:¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;—Å—Ç–∞–≤–∏–º –º–µ—Ç–∫—É –Ω–∞—á–∞–ª–∞ –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞–Ω–∏—è –¥–ª—è —É–¥–æ–±—Å—Ç–≤–∞ –ø–µ—Ä–µ—Ö–æ–¥–∞ NOP¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;–ø—Ä–æ—Å—Ç–æ —á—Ç–æ–±—ã –Ω–µ –∑–∞–±—ã—Ç—å, –Ω–∏–∂–µ –Ω–∞–ø–∏—à—É –∑–∞—á–µ–º CLR zeroreg¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;–æ–±–Ω—É–ª–∏–ª–∏ ¬´–Ω—É–ª–µ–≤–æ–𬪠—Ä–µ–≥–∏—Å—Ç—Ä //–µ—Å–ª–∏ R0 –±–æ–ª—å—à–µ –Ω–∏–≥–¥–µ –Ω–µ –∏—Å–ø–æ–ª—å–∑—É–µ—Ç—Å—è, —Ç–æ –µ–≥–æ –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ –æ–±–Ω—É–ª–∏—Ç—å –æ–¥–∏–Ω —Ä–∞–∑ CLR resultL¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;–æ–±–Ω—É–ª—è–µ–º —Ä–µ–∑—É–ª—å—Ç–∞—Ç CLR resultH¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;(–æ–±–∞ –±–∞–π—Ç–∞) SER countL¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;—É—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞–µ–º —Å—á—ë—Ç—á–∏–∫, SER countH¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;—Ç.–µ. –∑–∞–ø–∏—Å—ã–≤–∞–µ–º –≤ –Ω–µ–≥–æ $FFFF = 65535 1. –°—á–∏—Ç—ã–≤–∞–µ–º –±–∏—Ç —Å –≤—ã—Ö–æ–¥–∞ –º–æ–¥—É–ª—è—Ç–æ—Ä–∞. –¢—É—Ç –≤—Å—ë –ø—Ä–æ—Å—Ç–æ: —Å–æ—Ö—Ä–∞–Ω—è–µ–º –≤ tmp –∑–Ω–∞—á–µ–Ω–∏–µ —Ä–µ–≥–∏—Å—Ç—Ä–∞ PINA. 1 —Ç–∞–∫—Ç. ADC_count:¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;–º–µ—Ç–∫–∞ –Ω–∞—á–∞–ª–∞ —Ü–∏–∫–ª–∞ —Ñ–∏–ª—å—Ç—Ä–∞—Ü–∏–∏ IN tmp, PINA¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;—Å—á–∏—Ç—ã–≤–∞–µ–º –∑–Ω–∞—á–µ–Ω–∏–µ 2. –ü–µ—Ä–µ–¥–∞—ë–º –∑–Ω–∞—á–µ–Ω–∏–µ –ø—Ä–∏–Ω—è—Ç–æ–≥–æ –±–∏—Ç–∞ –Ω–∞ –≤—ã—Ö–æ–¥, —Ç.–µ. –≤—ã–ø–æ–ª–Ω—è–µ–º —Ä–æ–ª—å —Ç–∞–∫—Ç–æ–≤–æ–≥–æ –∫–æ–º–ø–∞—Ä–∞—Ç–æ—Ä–∞. –°–∏–≥–Ω–∞–ª –æ—Ç –º–æ–¥—É–ª—è—Ç–æ—Ä–∞ –ø–æ—Å—Ç—É–ø–∞–µ—Ç –Ω–∞ –Ý–ê1, –∞ –≤ –æ–±—Ä–∞—Ç–Ω—É—é —Å–≤—è–∑—å –∑–∞–≤–æ–¥–∏—Ç—Å—è —Å –Ý–ê0. –•–æ—á—É —Å–∫–∞–∑–∞—Ç—å, —á—Ç–æ –Ω–µ—Å–ø—Ä–æ—Å—Ç–∞! –ö–∞–∫ —É–∂–µ –≥–æ–≤–æ—Ä–∏–ª–æ—Å—å, –ø–æ—Ä—Ç –ê —É 2313 —Ç—Ä—ë—Ö–±–∏—Ç–Ω—ã–π, –≤–º–µ—Å—Ç–æ —Å—Ç–∞—Ä—à–µ–≥–æ –±–∏—Ç–∞ —Ñ—É–Ω–∫—Ü–∏–æ–Ω–∏—Ä—É–µ—Ç —Å–±—Ä–æ—Å. –¢–∞–∫ —á—Ç–æ, –≤–æ-–ø–µ—Ä–≤—ã—Ö, –Ω–µ –Ω–∞–¥–æ –±–æ—è—Ç—å—Å—è –≤—ã—Å—Ç–∞–≤–∏—Ç—å —á—Ç–æ-–Ω–∏–±—É–¥—å –Ω–µ —Ç–æ, –∞ –≤–æ-–≤—Ç–æ—Ä—ã—Ö, –¥–æ—Å—Ç–∞—Ç–æ—á–Ω–æ –ø–æ—Ç—Ä–∞—Ç–∏—Ç—å –æ–¥–∏–Ω —Ç–∞–∫—Ç –∏ —Å–¥–≤–∏–Ω—É—Ç—å —Å–æ–¥–µ—Ä–∂–∏–º–æ–µ tmp –Ω–∞ –æ–¥–∏–Ω —Ä–∞–∑—Ä—è–¥ –≤–ø—Ä–∞–≤–æ –∏ –ø–µ—Ä–µ–¥–∞—Ç—å –Ω–∞ –≤—ã—Ö–æ–¥ (2-–π –∏ 3-–π —Ç–∞–∫—Ç—ã): LSR tmp¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;—Å–¥–≤–∏–≥–∞–µ–º –≤–ø—Ä–∞–≤–æ –Ω–∞ –æ–¥–∏–Ω —Ä–∞–∑—Ä—è–¥ OUT PORTA, tmp¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;–ø–µ—Ä–µ–¥–∞—ë–º –∑–Ω–∞—á–µ–Ω–∏–µ –Ω–∞ –≤—ã—Ö–æ–¥. –í–æ—Ç –∑–¥–µ—Å—å –º–æ–∂–Ω–æ —Å—ç–∫–æ–Ω–æ–º–∏—Ç—å –æ–¥–∏–Ω —Ç–∞–∫—Ç, –µ—Å–ª–∏ –ø–µ—Ä–µ–¥–∞–≤–∞—Ç—å –∑–Ω–∞—á–µ–Ω–∏–µ –≤ –¥—Ä—É–≥–æ–π –ø–æ—Ä—Ç (—Å –¥—Ä—É–≥–∏–º –±—É–∫–≤–µ–Ω–Ω—ã–º –∏–Ω–¥–µ–∫—Å–æ–º, –Ω–æ —Å —Ç–µ–º –∂–µ –Ω–æ–º–µ—Ä–æ–º!), —Ç–æ–≥–¥–∞ –Ω–µ –ø–æ—Ç—Ä–µ–±—É–µ—Ç—Å—è —Å–¥–≤–∏–≥–∞. –û–¥–Ω–∞–∫–æ —Ç—Ä–æ–≥–∞—Ç—å –¥—Ä—É–≥–∏–µ –ø–æ—Ä—Ç—ã –º–Ω–µ –Ω–µ —Ö–æ—Ç–µ–ª–æ—Å—å, –ø–æ—ç—Ç–æ–º—É –∑–∞–¥–µ–π—Å—Ç–≤–æ–≤–∞–Ω —Ç–æ–ª—å–∫–æ –ø–æ—Ä—Ç –ê. 3. –ü—Ä–∏–±–∞–≤–∏—Ç—å –∑–Ω–∞—á–µ–Ω–∏–µ –ø—Ä–∏–Ω—è—Ç–æ–≥–æ –±–∏—Ç–∞ –∫ –∞–∫–∫—É–º—É–ª—è—Ç–æ—Ä—É. –ï—â—ë –æ–¥–Ω–∞ –ø—Ä–µ–ª–µ—Å—Ç—å –ø–æ—Ä—Ç–∞ –ê —É –¢–∏–Ω—å–∫–∏ –≤ —Ç–æ–º, —á—Ç–æ —Å—Ç–∞—Ä—à–∏–µ –Ω–µ–∏—Å–ø–æ–ª—å–∑—É–µ–º—ã–µ –±–∏—Ç—ã —á–∏—Ç–∞—é—Ç—Å—è –∫–∞–∫ –Ω—É–ª–∏. –ü–æ—ç—Ç–æ–º—É –Ω–µ –Ω–∞–¥–æ –Ω–∞–∫–ª–∞–¥—ã–≤–∞—Ç—å –º–∞—Å–∫—É –Ω–∞ tmp (–∏–º–µ—è –≤ –≤–∏–¥—É —á—Ç–æ-—Ç–æ –≤—Ä–æ–¥–µ ANDI tmp, 0b00000001) —á—Ç–æ–±—ã –Ω–µ –ø—Ä–æ–ª–µ–∑–ª–∏ –ª–∏—à–Ω–∏–µ –µ–¥–∏–Ω–∏—Ü—ã! –ê —ç—Ç–æ —ç–∫–æ–Ω–æ–º–∏—è —Ç–∞–∫—Ç–∞ –ú–ö. –ü–ª—é—Å –∫–æ –≤—Å–µ–º—É, –∑–Ω–∞—á–µ–Ω–∏–µ –ø—Ä–∏–Ω—è—Ç–æ–≥–æ –±–∏—Ç–∞ —É –Ω–∞—Å —Ö—Ä–∞–Ω–∏—Ç—Å—è –≤ –º–ª–∞–¥—à–µ–º —Ä–∞–∑—Ä—è–¥–µ —Ä–µ–≥–∏—Å—Ç—Ä–∞. –ù–∞–º –Ω–µ –ø—Ä–∏–¥—ë—Ç—Å—è —Ç—Ä–∞—Ç–∏—Ç—å —Ç–∞–∫—Ç—ã –∏ —Å–¥–≤–∏–≥–∞—Ç—å –µ–≥–æ! –ò —ç—Ç–æ –∑–Ω–∞—á–∏—Ç, —á—Ç–æ –º—ã –º–æ–∂–µ–º –ø—Ä–æ—Å—Ç–æ —Å–ª–æ–∂–∏—Ç—å –∑–Ω–∞—á–µ–Ω–∏—è –¥–≤—É—Ö —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤: tmp –∏ –∞–∫–∫—É–º—É–ª—è—Ç–æ—Ä–∞. –•–æ—Ç—è –Ω–∞ —Å–∞–º–æ–º –¥–µ–ª–µ –≤—Å—ë –Ω–µ —Ç–∞–∫ –ø—Ä–æ—Å—Ç–æ: –ø—Ä–∏–¥—ë—Ç—Å—è —Å—É–º–º–∏—Ä–æ–≤–∞—Ç—å –¥–≤—É—Ö–±–∞–π—Ç–Ω—ã–π —Ä–µ–≥–∏—Å—Ç—Ä —Å –æ–¥–Ω–æ–±–∞–π—Ç–Ω—ã–º. –°–¥–µ–ª–∞–µ–º —ç—Ç–æ –≤ –¥–≤–∞ –∑–∞—Ö–æ–¥–∞: —Å–Ω–∞—á–∞–ª–∞ —Å–ª–æ–∂–∏–º –º–ª–∞–¥—à–∏–π –±–∞–π—Ç —Ä–µ–∑—É–ª—å—Ç–∞—Ç–∞ —Å —Ä–µ–≥–∏—Å—Ç—Ä–æ–º tmp (–≤ –∫–æ—Ç–æ—Ä–æ–º —Ö—Ä–∞–Ω–∏—Ç—Å—è –ø—Ä–∏—à–µ–¥—à–∏–π –±–∏—Ç –æ—Ç –¥–µ–ª—å—Ç–∞-—Å–∏–≥–º–∞ –º–æ–¥—É–ª—è—Ç–æ—Ä–∞), –∞ –ø–æ—Ç–æ–º —Å—Ç–∞—Ä—à–∏–π –±–∞–π—Ç —Å —Ñ–ª–∞–≥–æ–º –ø–µ—Ä–µ–Ω–æ—Å–∞ –°, –µ—Å–ª–∏ –ø—Ä–æ–∏–∑–æ—à–ª–æ –ø–µ—Ä–µ–ø–æ–ª–Ω–µ–Ω–∏–µ. –í —Å–ø–∏—Å–∫–µ –∫–æ–º–∞–Ω–¥ –¢–∏–Ω—å–∫–∏ —è –Ω–µ –Ω–∞—à—ë–ª –∫–æ–º–∞–Ω–¥—É —Å–ª–æ–∂–µ–Ω–∏—è —Ä–µ–≥–∏—Å—Ç—Ä–∞ —Å —Ñ–ª–∞–≥–æ–º –ø–µ—Ä–µ–Ω–æ—Å–∞, —Ç–æ–ª—å–∫–æ —Å–ª–æ–∂–µ–Ω–∏–µ –¥–≤—É—Ö —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ —Å —É—á—ë—Ç–æ–º —Ñ–ª–∞–≥–∞ –ø–µ—Ä–µ–Ω–æ—Å–∞. –¢—É—Ç-—Ç–æ –∏ –ø–æ—Ç—Ä–µ–±—É–µ—Ç—Å—è ¬´–Ω—É–ª–µ–≤–æ–𬪠—Ä–µ–≥–∏—Å—Ç—Ä: —Å–ª–æ–∂–∏–º –µ–≥–æ —Å —É—á—ë—Ç–æ–º –ø–µ—Ä–µ–Ω–æ—Å–∞ —Å–æ —Å—Ç–∞—Ä—à–∏–º –±–∞–π—Ç–æ–º —Ä–µ–∑—É–ª—å—Ç–∞—Ç–∞. –ï—Å–ª–∏ –ø–µ—Ä–µ–ø–æ–ª–Ω–µ–Ω–∏—è –Ω–µ –±—ã–ª–æ (–° = 0), —Ç–æ –∑–Ω–∞—á–µ–Ω–∏–µ countH –Ω–µ –∏–∑–º–µ–Ω–∏—Ç—Å—è. –í –ø—Ä–æ—Ç–∏–≤–Ω–æ–º —Å–ª—É—á–∞–µ —É–≤–µ–ª–∏—á–∏—Ç—Å—è –Ω–∞ –µ–¥–∏–Ω–∏—Ü—É (4-–π –∏ 5-–π —Ç–∞–∫—Ç—ã). //ANDI tmp, 0b00000001¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;–≤ –æ–±—â–µ–º —Å–ª—É—á–∞–µ –æ–±–Ω—É–ª–µ–Ω–∏–µ –ª–∏—à–Ω–∏—Ö –µ–¥–∏–Ω–∏—Ü ADD resultL, tmp¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;–ø—Ä–∏–±–∞–≤–ª—è–µ–º –∑–Ω–∞—á–µ–Ω–∏–µ –ø—Ä–∏–Ω—è—Ç–æ–≥–æ –±–∏—Ç–∞ –∫ –º–ª–∞–¥—à–µ–º—É –±–∞–π—Ç—É ADC resultH, zeroreg¬Ý ¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;–ø—Ä–∏–±–∞–≤–ª—è–µ–º —Ñ–ª–∞–≥ –ø–µ—Ä–µ–Ω–æ—Å–∞ (–µ—Å–ª–∏ –µ—Å—Ç—å) –∫ —Å—Ç–∞—Ä—à–µ–º—É –±–∞–π—Ç—É –ï—Å–ª–∏ –¥–ª—è –≤–≤–æ–¥–∞-–≤—ã–≤–æ–¥–∞ –∏—Å–ø–æ–ª—å–∑—É–µ—Ç—Å—è —Ç—Ä–µ—Ç–∏–π-—á–µ—Ç–≤—ë—Ä—Ç—ã–π-–ø—è—Ç—ã–π –≤—ã–≤–æ–¥ –ø–æ—Ä—Ç–∞, —Ç–æ –¥–ª—è —ç–∫–æ–Ω–æ–º–∏–∏ –≤—Ä–µ–º–µ–Ω–∏ –≤—ã—á–∏—Å–ª–µ–Ω–∏–π —Ç–µ–æ—Ä–µ—Ç–∏—á–µ—Å–∫–∏ –µ—Å—Ç—å —Å–º—ã—Å–ª –Ω–µ —Å–¥–≤–∏–≥–∞—Ç—å –ø—Ä–∏–Ω—è—Ç—ã–π –±–∏—Ç –≤ –º–ª–∞–¥—à–∏–π —Ä–∞–∑—Ä—è–¥, –∞ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –¥–ª—è —Ä–µ–∑—É–ª—å—Ç–∞—Ç–∞ —Ç—Ä–∏ –±–∞–π—Ç–∞ (—Ä–µ–≥–∏—Å—Ç—Ä—ã: resultL, resultM, resultH). –¢.–µ. –ø–æ-–ø—Ä–µ–∂–Ω–µ–º—É —Å–ª–æ–∂–∏—Ç—å –ø—Ä–∏–Ω—è—Ç—ã–π –±–∏—Ç —Å –º–ª–∞–¥—à–∏–º –±–∞–π—Ç–æ–º —Ä–µ–∑—É–ª—å—Ç–∞—Ç–∞ (ADD resultL, tmp), –Ω–æ –ø–æ—Ç–æ–º –¥–≤–∞ —Ä–∞–∑–∞ —Å–ª–æ–∂–∏—Ç—å —Å —É—á—ë—Ç–æ–º —Ñ–ª–∞–≥–∞ –ø–µ—Ä–µ–Ω–æ—Å–∞ —Å—Ä–µ–¥–Ω–∏–π –∏ —Å—Ç–∞—Ä—à–∏–π –±–∞–π—Ç—ã (ADC resultM, zeroreg; ADC resultH, zeroreg) c ¬´–Ω—É–ª–µ–≤—ã–º¬ª —Ä–µ–≥–∏—Å—Ç—Ä–æ–º. –ê –ø–æ –æ–∫–æ–Ω—á–∞–Ω–∏–∏ –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞–Ω–∏—è –ø—Ä–æ—Å—Ç–æ —Å–¥–≤–∏–Ω—É—Ç—å –∑–Ω–∞—á–∞—â–∏–µ 16 –±–∏—Ç –≤ –∫–∞–∫–∏–µ-–ª–∏–±–æ –¥–≤–∞ —Ä–µ–≥–∏—Å—Ç—Ä–∞. 4. –ò–Ω–∫—Ä–µ–º–µ–Ω—Ç/–¥–µ–∫—Ä–µ–º–µ–Ω—Ç —Å—á—ë—Ç—á–∏–∫–∞. –¢—É—Ç —Ç–æ–∂–µ –Ω–∏—á–µ–≥–æ –æ—Å–æ–±–µ–Ω–Ω–æ–≥–æ. –ù–∞ —ç—Ç–æ—Ç —Ä–∞–∑ –µ—Å—Ç—å –∫–æ–º–∞–Ω–¥—ã —Å–ª–æ–∂–µ–Ω–∏—è/–≤—ã—á–∏—Ç–∞–Ω–∏—è —Å–ª–æ–≤–∞ (–¥–≤—É—Ö–±–∞–π—Ç–Ω–æ–≥–æ —á–∏—Å–ª–∞) —Å –∫–æ–Ω—Å—Ç–∞–Ω—Ç–æ–π. –û–¥–Ω–∞–∫–æ, –ø—Ä–∏ –∂–µ–ª–∞–Ω–∏–∏ —É–≤–µ–ª–∏—á–∏—Ç—å —Ä–∞–∑—Ä—è–¥–Ω–æ—Å—Ç—å, –Ω–∞–¥–æ –±—É–¥–µ—Ç –ø–æ–¥—É–º–∞—Ç—å (6-–π –∏ 7-–π —Ç–∞–∫—Ç—ã). SBIW countL, 1¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;–¥–µ–∫—Ä–µ–º–µ–Ω—Ç –¥–≤—É—Ö–±–∞–π—Ç–Ω–æ–≥–æ —Å—á—ë—Ç—á–∏–∫–∞ 5. –ü—Ä–æ–≤–µ—Ä–∫–∞ —É—Å–ª–æ–≤–∏—è –æ–∫–æ–Ω—á–∞–Ω–∏—è –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞–Ω–∏—è. –ü–æ—Å–∫–æ–ª—å–∫—É —Å—á—ë—Ç—á–∏–∫ –¥–µ–∫—Ä–µ–º–µ–Ω—Ç–Ω—ã–π, —Ç–æ –µ—Å–ª–∏ –µ–≥–æ –∑–Ω–∞—á–µ–Ω–∏–µ –Ω–µ —Ä–∞–≤–Ω–æ –Ω—É–ª—é, —Ç–æ –ø–µ—Ä–µ—Ö–æ–¥–∏–º –∫ –ø.1, —Ç.–µ. –∫ –º–µ—Ç–∫–µ ADC_count (8-–π –∏ 9-–π —Ç–∞–∫—Ç—ã). BRNE ADC_count¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;–ø–µ—Ä–µ—Ö–æ–¥ –Ω–∞ –º–µ—Ç–∫—É ADC_count, –µ—Å–ª–∏ –Ω–µ –Ω–æ–ª—å 6. –ò—Ç–∞–∫, –≤ resultH –∏ resultL –ø–æ–ª—É—á–∏–ª–∏ —Ä–µ–∑—É–ª—å—Ç–∞—Ç. –í—Å—ë, –¥–∞–ª–µ–µ –º–æ–∂–µ–º –¥–µ–ª–∞—Ç—å —Å –Ω–∏–º –≤—Å—ë, —á—Ç–æ —Ö–æ—Ç–∏–º. –í —Å–∞–º–æ–º –Ω–∞—á–∞–ª–µ, –ø–æ—Å–ª–µ –º–µ—Ç–∫–∏ ADC_start, –º—ã –ø–æ—Å—Ç–∞–≤–∏–ª–∏ ¬´–Ω–æ–ø—á–∏–∫¬ª. –ù–∞ –º–µ—Å—Ç–æ —ç—Ç–æ–≥–æ NOP‚Äôa –º–æ–∂–Ω–æ –ø–æ—Å—Ç–∞–≤–∏—Ç—å —á—Ç–æ-–Ω–∏–±—É–¥—å –ø–æ–ª–µ–∑–Ω–æ–µ. –ù–∞–ø—Ä–∏–º–µ—Ä, –≥–ª–æ–±–∞–ª—å–Ω–æ –∑–∞–ø—Ä–µ—Ç–∏—Ç—å –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è, –µ—Å–ª–∏ –æ–Ω–∏ —Ä–∞–∑—Ä–µ—à–µ–Ω—ã (CLI). –ü–æ—Ç–æ–º—É —á—Ç–æ –ª—é–±–æ–π –Ω–µ–∑–∞–ø–ª–∞–Ω–∏—Ä–æ–≤–∞–Ω–Ω—ã–π –≤—ã—Ö–æ–¥ –∏–∑ —Ü–∏–∫–ª–∞ –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞–Ω–∏—è —Å–≤–µ–¥—ë—Ç –≤—Å—é —Ç–æ—á–Ω–æ—Å—Ç—å –Ω–∞ –Ω–µ—Ç. –ú–æ–∂–µ—Ç –±—ã—Ç—å, –∫–æ–º—É-–Ω–∏–±—É–¥—å –∑–∞—Ö–æ—á–µ—Ç—Å—è –ø–æ–¥–∂–µ—á—å —Å–≤–µ—Ç–æ–¥–∏–æ–¥–∏–∫ –Ω–∞ –≤—Ä–µ–º—è –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞–Ω–∏—è –∏–ª–∏ –µ—â—ë —á—Ç–æ. –ù—É –∏ –∫–æ–µ-—á—Ç–æ –µ—â—ë‚Ķ –ü–æ—Å–∫–æ–ª—å–∫—É —Ä–æ–ª—å —Ç–∞–∫—Ç–∏—Ä—É–µ–º–æ–≥–æ –∫–æ–º–ø–∞—Ä–∞—Ç–æ—Ä–∞ —É –Ω–∞—Å –≤—ã–ø–æ–ª–Ω—è–µ—Ç –ú–ö —Ç–æ–ª—å–∫–æ –≤ —Ü–∏–∫–ª–µ –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞–Ω–∏—è, –≤–Ω–µ —ç—Ç–æ–≥–æ —Ü–∏–∫–ª–∞ –≤–Ω–µ—à–Ω—è—è —Å—Ö–µ–º–∞ (—Ä–∏—Å.5) ¬´–∑–∞–º–∏—Ä–∞–µ—Ǭª. –≠—Ç–æ —Ä–∞–≤–Ω–æ—Å–∏–ª—å–Ω–æ —Ç–æ–º—É, —á—Ç–æ –º—ã —Ä–∞–∑—Ä—ã–≤–∞–µ–º —Ü–µ–ø—å –æ—Ç—Ä–∏—Ü–∞—Ç–µ–ª—å–Ω–æ–π –æ–±—Ä–∞—Ç–Ω–æ–π —Å–≤—è–∑–∏ (–û–û–°), —á—Ç–æ –ø—Ä–∏–≤–æ–¥–∏—Ç –∫ —É—Ö–æ–¥—É –∏–Ω—Ç–µ–≥—Ä–∞—Ç–æ—Ä–∞ (–û–Ý3 –Ω–∞ —Ä–∏—Å.5) –≤ –Ω–∞—Å—ã—â–µ–Ω–∏–µ –¥–æ ¬±Umax. –°–ª–µ–¥–æ–≤–∞—Ç–µ–ª—å–Ω–æ, –Ω–µ—Å–∫–æ–ª—å–∫–æ –ø–µ—Ä–≤—ã—Ö —Ç–∞–∫—Ç–æ–≤ –º–æ–¥—É–ª—è—Ç–æ—Ä –≤—ã—Ö–æ–¥–∏—Ç –∏–∑ –Ω–∞—Å—ã—â–µ–Ω–∏—è –≤ —Ä–∞–±–æ—á—É—é –æ–±–ª–∞—Å—Ç—å, –∏ –Ω–µ—Å–∫–æ–ª—å–∫–æ –ø–µ—Ä–≤—ã—Ö –±–∏—Ç –º–æ–≥—É—Ç –≤–Ω–µ—Å—Ç–∏ –æ—à–∏–±–∫—É –≤ —Ä–µ–∑—É–ª—å—Ç–∞—Ç –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞–Ω–∏—è. –ó–Ω–∞—á–∏—Ç, –¥–æ –≤—Ö–æ–¥–∞ –≤ —Ü–∏–∫–ª –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ —Ö–æ—Ç—è –±—ã –ø–æ–ø—ã—Ç–∞—Ç—å—Å—è –≤—ã–≤–µ—Å—Ç–∏ –º–æ–¥—É–ª—è—Ç–æ—Ä –≤ —Ä–∞–±–æ—á—É—é –æ–±–ª–∞—Å—Ç—å. –°–¥–µ–ª–∞—Ç—å —ç—Ç–æ –ø—Ä–æ—â–µ –≤—Å–µ–≥–æ, –ø—Ä–æ–∏–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞–≤ —Å–∏–≥–Ω–∞–ª, –∏–¥—É—â–∏–π –æ—Ç –ú–ö –∫ –î–°–ú. –ò–Ω—ã–º–∏ —Å–ª–æ–≤–∞–º–∏, –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ —Å—á–∏—Ç–∞—Ç—å –∑–Ω–∞—á–µ–Ω–∏–µ –≤—ã—Ö–æ–¥–Ω–æ–≥–æ –ø–æ—Ä—Ç–∞, –ø—Ä–æ–∏–Ω–≤–µ—Ä—Ç–∏—Ä–æ–≤–∞—Ç—å –µ–≥–æ –∏ —Å–Ω–æ–≤–∞ –æ—Ç–ø—Ä–∞–≤–∏—Ç—å –Ω–∞ –≤—ã—Ö–æ–¥, –∑–∞—Ç–µ–º –ø–æ–¥–æ–∂–¥–∞—Ç—å, –∏ —Ç–æ–ª—å–∫–æ –ø–æ—Ç–æ–º –≤—Ö–æ–¥–∏—Ç—å –≤ —Ü–∏–∫–ª (–º–µ—Ç–∫–∞ ADC_count). –°–∫–æ–ª—å–∫–æ –≤—Ä–µ–º–µ–Ω–∏ –∂–¥–∞—Ç—å? –≠—Ç–æ –∑–∞–≤–∏—Å–∏—Ç –æ—Ç –≤—Ö–æ–¥–Ω–æ–≥–æ —Å–∏–≥–Ω–∞–ª–∞. –û–¥–Ω–∞–∫–æ, –¥–æ –Ω–∞—á–∞–ª–∞ –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞–Ω–∏—è –º—ã –æ –Ω—ë–º –Ω–∏—á–µ–≥–æ –Ω–µ –∑–Ω–∞–µ–º. –Ý–∞—Å—Å–º–æ—Ç—Ä–∏–º —ç–∫—Å—Ç—Ä–µ–º–∞–ª—å–Ω—ã–µ —Å–ª—É—á–∞–∏. –í –ø–µ—Ä–≤–æ–º —Å–ª—É—á–∞–µ –ø–æ—Å–ª–µ —Ç–æ–≥–æ, –∫–∞–∫ –º—ã –¥—ë—Ä–Ω–µ–º –Ω–æ–≥–æ–π –ú–ö, –Ω–∞ –≤—Ö–æ–¥–µ –∏–Ω—Ç–µ–≥—Ä–∞—Ç–æ—Ä–∞ –±—É–¥–µ—Ç –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ –≤–æ–∑–º–æ–∂–Ω–æ–µ (–ø–æ –º–æ–¥—É–ª—é) –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ, –≤–æ –≤—Ç–æ—Ä–æ–º ‚Äî –≤–¥–≤–æ–µ –º–µ–Ω—å—à–µ, –≤ —Ç—Ä–µ—Ç—å–µ–º ‚Äî –º–∏–Ω–∏–º–∞–ª—å–Ω–æ –≤–æ–∑–º–æ–∂–Ω–æ–µ. –ù–∞ —Ä–∏—Å—É–Ω–∫–µ 12 –ø–æ–∫–∞–∑–∞–Ω–∞ –æ—Å—Ü–∏–ª–ª–æ–≥—Ä–∞–º–º–∞ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏—è –Ω–∞ –≤—ã—Ö–æ–¥–µ –∏–Ω—Ç–µ–≥—Ä–∞—Ç–æ—Ä–∞ (–≤ –ø—Ä–µ–¥–ø–æ–ª–æ–∂–µ–Ω–∏–∏, —á—Ç–æ –æ–Ω –Ω–∞—Å—ã—Ç–∏–ª—Å—è –¥–æ -Umax) –¥–ª—è —ç—Ç–∏—Ö —Å–ª—É—á–∞–µ–≤.
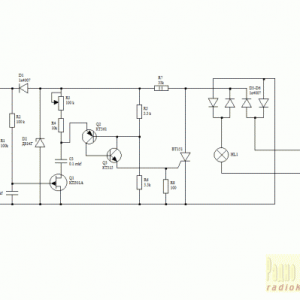
–Ý–∏—Å.12. –ö –≤—ã–±–æ—Ä—É –¥–ª–∏—Ç–µ–ª—å–Ω–æ—Å—Ç–∏ –∑–∞–¥–µ—Ä–∂–∫–∏ –ü–æ –≤–µ—Ä—Ç–∏–∫–∞–ª–∏ —à–∫–∞–ª–∞ –Ω–æ—Ä–º–∏—Ä–æ–≤–∞–Ω–∞ –Ω–∞ Umax, –ø–æ –≥–æ—Ä–∏–∑–æ–Ω—Ç–∞–ª–∏ ‚Äî –Ω–∞ –¥–ª–∏—Ç–µ–ª—å–Ω–æ—Å—Ç—å –æ–¥–Ω–æ–≥–æ —Ç–∞–∫—Ç–∞ –î–°–ú. –ü–æ—Å—Ç–æ—è–Ω–Ω–∞—è –≤—Ä–µ–º–µ–Ω–∏ –∏–Ω—Ç–µ–≥—Ä–∞—Ç–æ—Ä–∞ –≤—ã–±—Ä–∞–Ω–∞ —Ç–∞–∫–æ–π, —á—Ç–æ–±—ã –∑–∞ –æ–¥–∏–Ω —Ç–∞–∫—Ç –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ –Ω–∞—Ä–∞—Å—Ç–∞–ª–æ –Ω–µ –±–æ–ª–µ–µ, —á–µ–º –Ω–∞ 90% –æ—Ç Umax. –ò–∑ —Ä–∏—Å—É–Ω–∫–∞ –≤–∏–¥–Ω–æ, —á—Ç–æ –µ—Å–ª–∏ –¥–ª–∏—Ç–µ–ª—å–Ω–æ—Å—Ç—å –∑–∞–¥–µ—Ä–∂–∫–∏ –±—É–¥–µ—Ç —á—É—Ç—å –±–æ–ª—å—à–µ (–≤ –¥–∞–Ω–Ω–æ–º —Å–ª—É—á–∞–µ –Ω–∞ 10%) –¥–ª–∏—Ç–µ–ª—å–Ω–æ—Å—Ç–∏ –¥–≤—É—Ö —Ç–∞–∫—Ç–æ–≤ –º–æ–¥—É–ª—è—Ç–æ—Ä–∞, —Ç–æ –Ω–∞ –º–æ–º–µ–Ω—Ç –≤—Ö–æ–¥–∞ –≤ —Ü–∏–∫–ª –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞–Ω–∏—è –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ –Ω–∞ –≤—ã—Ö–æ–¥–µ –∏–Ω—Ç–µ–≥—Ä–∞—Ç–æ—Ä–∞ –±—É–¥–µ—Ç –ª–µ–∂–∞—Ç—å –≤ –ø—Ä–µ–¥–µ–ª–∞—Ö –æ—Ç -Umax –¥–æ +Umax. –¢–∞–∫–∏–º –æ–±—Ä–∞–∑–æ–º, –ø–æ–≤—ã—Å–∏—Ç—Å—è —Ç–æ—á–Ω–æ—Å—Ç—å –∏–∑–º–µ—Ä–µ–Ω–∏–π –≤ —Ä–∞–π–æ–Ω–µ U–æ–ø/2. –ò—Ç–∞–∫, –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ —Ç–∞–∫—Ç–æ–≤ –∑–∞–¥–µ—Ä–∂–∫–∏ –ú–ö –¥–æ–ª–∂–Ω–æ –±—ã—Ç—å —Ç–∞–∫–æ–µ –∂–µ, –∫–∞–∫ –≤ –¥–≤—É—Ö —Ç–∞–∫—Ç–∞—Ö –º–æ–¥—É–ª—è—Ç–æ—Ä–∞ –ø–ª—é—Å 5‚Ķ15 –ø—Ä–æ—Ü–µ–Ω—Ç–æ–≤ (–∑–∞–≤–∏—Å–∏—Ç –æ—Ç –ø–æ—Å—Ç–æ—è–Ω–Ω–æ–π –≤—Ä–µ–º–µ–Ω–∏ –∏–Ω—Ç–µ–≥—Ä–∞—Ç–æ—Ä–∞). –ö–æ–¥: LDI tmp, 0b00000001¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;—Ç.–∫. –º–ª–∞–¥—à–∏–π —Ä–∞–∑—Ä—è–¥ –ø–æ—Ä—Ç–∞ –ê –Ω–∞—Å—Ç—Ä–æ–µ–Ω –Ω–∞ –≤—ã—Ö–æ–¥, OUT PINA, tmp¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;–¥—ë—Ä–≥–∞–µ–º –Ω–æ–≥–æ–π –∑–∞–ø–∏—Å—å—é ¬´1¬ª –≤ —Ä–µ–≥–∏—Å—Ç—Ä PIN NOP¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;–∑–∞–¥–µ—Ä–∂–∫–∏ –ø–æ –≤–∫—É—Å—É, –º–æ–∂–Ω–æ –æ—Ä–≥–∞–Ω–∏–∑–æ–≤–∞—Ç—å —Ü–∏–∫–ª, ‚Ķ¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;–º–æ–∂–Ω–æ –¥–µ–ª–∞—Ç—å —á—Ç–æ-–Ω–∏–±—É–¥—å –ø–æ–ª–µ–∑–Ω–æ–µ: –Ω–∞–ø—Ä–∏–º–µ—Ä, NOP¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý¬Ý ;–æ–±–Ω—É–ª—è—Ç—å/—É—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞—Ç—å —Ä–µ–≥–∏—Å—Ç—Ä—ã, –∑–∞–ø—Ä–µ—â–∞—Ç—å –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è –•–æ—Ç—è –µ—Å–ª–∏ –Ω–∞ —á—Ç–æ-—Ç–æ –≤–∞–∂–Ω–æ–µ –Ω–µ –±—É–¥–µ—Ç —Ö–≤–∞—Ç–∞—Ç—å –ø–∞–º—è—Ç–∏ –Ω–∞ –ø–∞—Ä—É –∫–æ–º–∞–Ω–¥, —ç—Ç–æ –º–æ–∂–Ω–æ –≤—ã–∫–∏–Ω—É—Ç—å. –í –∂–µ–ª–µ–∑–µ –≤—Å—ë —ç—Ç–æ –ø—Ä–æ–≤–µ—Ä—è–ª–æ—Å—å –Ω–∞ –º–∞–∫–µ—Ç–Ω–æ–π –ø–ª–∞—Ç–µ. –û—Å–Ω–æ–≤–Ω–∞—è —á–∞—Å—Ç—å —Å—Ö–µ–º—ã –ø–æ–∫–∞–∑–∞–Ω–∞ –Ω–∞ —Ä–∏—Å.13.
–Ý–∏—Å.13. –û—Å–Ω–æ–≤–Ω–∞—è —á–∞—Å—Ç—å —Å—Ö–µ–º—ã –º–∞–∫–µ—Ç–Ω–æ–π –ø–ª–∞—Ç—ã –¥–ª—è —Ç–µ—Å—Ç–∏—Ä–æ–≤–∞–Ω–∏—è –û–ø–µ—Ä–∞—Ü–∏–æ–Ω–Ω–∏–∫ ‚Äî TL084CN (–≤—Ö–æ–¥–Ω–æ–µ —Å–æ–ø—Ä–æ—Ç–∏–≤–ª–µ–Ω–∏–µ 10^12 –û–º, —Ç.–µ. –º–∏–ª–ª–∏–æ–Ω –º–µ–≥–∞–æ–º!!! [7]). –Ý1 ‚Äî –º–Ω–æ–≥–æ–æ–±–æ—Ä–æ—Ç–Ω—ã–π, —Ç–∏–ø–∞ 3106. –ü–∏—Ç–∞–Ω–∏–µ (¬±5 –í) ‚Äî –æ—Ç –¥–≤—É—Ö —Ç–µ–ª–µ—Ñ–æ–Ω–Ω—ã—Ö –∑–∞—Ä—è–¥–æ–∫, –Ω–µ –æ—á–µ–Ω—å —Å—Ç–∞–±–∏–ª–∏–∑–∏—Ä–æ–≤–∞–Ω–Ω—ã—Ö. –ú–ö —Ä–∞–±–æ—Ç–∞–µ—Ç –Ω–∞ —á–∞—Å—Ç–æ—Ç–µ 500 –∫–ì—Ü –æ—Ç –≤—Å—Ç—Ä–æ–µ–Ω–Ω–æ–≥–æ –≥–µ–Ω–µ—Ä–∞—Ç–æ—Ä–∞. –Ý–µ–∑—É–ª—å—Ç–∞—Ç –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞–Ω–∏—è –≤—ã–≤–æ–¥–∏—Ç—Å—è –Ω–∞ –∂–∏–¥–∫–æ–∫—Ä–∏—Å—Ç–∞–ª–ª–∏—á–µ—Å–∫–∏–π –∏–Ω–¥–∏–∫–∞—Ç–æ—Ä (–ñ–ö–ò) 0802 –ø—Ä—è–º–æ –≤ —Ö–µ–∫—Å–µ. –° —Ç–∞–∫–æ–π –ø—Ä–æ—à–∏–≤–∫–æ–π –∏ —Å—Ö–µ–º–æ–π —É–¥–∞–ª–æ—Å—å –¥–æ–±–∏—Ç—å—Å—è —ç—Ñ—Ñ–µ–∫—Ç–∏–≤–Ω–æ–≥–æ —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è –±–æ–ª–µ–µ 15 –±–∏—Ç ‚Äî –º–ª–∞–¥—à–∏–π —Ä–∞–∑—Ä—è–¥ –∏–Ω–æ–≥–¥–∞ ¬´–¥—ë—Ä–≥–∞–µ—Ǘŗ謪. –°—Ç–æ–ª—å –Ω–∏–∑–∫–∞—è —á–∞—Å—Ç–æ—Ç–∞ —Ç–∞–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏—è –ú–ö —Å–≤—è–∑–∞–Ω–∞ —Å —É–¥–æ–±—Å—Ç–≤–æ–º –æ—Ç–æ–±—Ä–∞–∂–µ–Ω–∏—è –∏–Ω—Ñ–æ—Ä–º–∞—Ü–∏–∏ (–¥–∞–Ω–Ω—ã–µ –æ–±–Ω–æ–≤–ª—è—é—Ç—Å—è –ø—Ä–∏–º–µ—Ä–Ω–æ —Ä–∞–∑ –≤ —Å–µ–∫—É–Ω–¥—É –ø–æ –æ–∫–æ–Ω—á–∞–Ω–∏–∏ –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞–Ω–∏—è) –∏ –Ω–µ —Å–∞–º–æ–π –≤—ã—Å–æ–∫–æ–π —Å–∫–æ—Ä–æ—Å—Ç—å—é –Ω–∞—Ä–∞—Å—Ç–∞–Ω–∏—è –∏—Å–ø–æ–ª—å–∑–æ–≤–∞–Ω–Ω–æ–≥–æ –û–£ (13 –í/–º–∫—Å). –°–∞–º—ã–µ –≤—ã—Å–æ–∫–∏–µ —Ç—Ä–µ–±–æ–≤–∞–Ω–∏—è –ø–æ –±—ã—Å—Ç—Ä–æ–¥–µ–π—Å—Ç–≤–∏—é –ø—Ä–µ–¥—ä—è–≤–ª—è—é—Ç—Å—è –∫ —Å—É–º–º–∞—Ç–æ—Ä—É/–≤—ã—á–∏—Ç–∞—Ç–µ–ª—é (–û–Ý2 –Ω–∞ —Ä–∏—Å.5 –∏ 13): –≤—Ä–µ–º—è –µ–≥–æ –ø–µ—Ä–µ–∫–ª—é—á–µ–Ω–∏—è –¥–æ–ª–∂–Ω–æ –±—ã—Ç—å –º–Ω–æ–≥–æ –º–µ–Ω—å—à–µ –¥–ª–∏—Ç–µ–ª—å–Ω–æ—Å—Ç–∏ –æ–¥–Ω–æ–≥–æ —Ç–∞–∫—Ç–∞ –º–æ–¥—É–ª—è—Ç–æ—Ä–∞. –ù–∞–ø–æ—Å–ª–µ–¥–æ–∫ –µ—â—ë –æ–¥–Ω–∞ —Ñ–∏—à–∫–∞. –î–æ–ø—É—Å—Ç–∏–º, –æ–ø–æ—Ä–Ω–æ–µ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ (–∫–æ—Ç–æ—Ä–æ–µ –≤—ã–¥–∞—ë—Ç –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä, –≤ –¥–∞–Ω–Ω–æ–π —Å—Ö–µ–º–µ) —É –Ω–∞—Å 4,789 –í. –¢–æ–≥–¥–∞ –µ—Å–ª–∏ –º—ã –≤ —Å—á—ë—Ç—á–∏–∫ –≤–º–µ—Å—Ç–æ $FFFF (2^16 - 1) –ø—Ä–∏ –∏–Ω–∏—Ü–∏–∞–ª–∏–∑–∞—Ü–∏–∏ –∑–∞–ø–∏—à–µ–º $BB12 (47890), —Ç–æ —Ä–µ–∑—É–ª—å—Ç–∞—Ç –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞–Ω–∏—è —É –Ω–∞—Å –±—É–¥–µ—Ç —Å—Ä–∞–∑—É –≤ –¥–µ—Å—è—Ç—ã—Ö –¥–æ–ª—è—Ö –º–∏–ª–ª–∏–≤–æ–ª—å—Ç–∞!!! –û—á–µ–Ω—å —É–¥–æ–±–Ω–æ, –∫–∞–∫ –º–Ω–µ –∫–∞–∂–µ—Ç—Å—è. –ö–æ–Ω–µ—á–Ω–æ, –Ω–µ–º–Ω–æ–≥–æ –ø–æ—Å—Ç—Ä–∞–¥–∞–µ—Ç —Ç–æ—á–Ω–æ—Å—Ç—å‚Ķ –Ω–æ –µ—Å–ª–∏ —Å–∏–ª—å–Ω–æ –Ω–µ –∑–ª–æ—É–ø–æ—Ç—Ä–µ–±–ª—è—Ç—å (—Ö–æ—Ç—è –±—ã –Ω–µ –æ–ø—É—Å–∫–∞—Ç—å—Å—è –Ω–∏–∂–µ 2^15), —Ç–æ –Ω–∏—á–µ–≥–æ —Å—Ç—Ä–∞—à–Ω–æ–≥–æ. –° –¥—Ä—É–≥–æ–π —Å—Ç–æ—Ä–æ–Ω—ã, –µ—Å–ª–∏ —Ç–∞–∫–∏–º –æ–±—Ä–∞–∑–æ–º —Å–¥–µ–ª–∞—Ç—å –≤—Ä–µ–º—è –∏–∑–º–µ—Ä–µ–Ω–∏—è –∫—Ä–∞—Ç–Ω—ã–º 20 –º—Å, —Ç–æ –∑–∞ —Å—á—ë—Ç —É—Å—Ä–µ–¥–Ω–µ–Ω–∏—è –¥–æ–ª–∂–Ω–æ –º–∏–Ω–∏–º–∏–∑–∏—Ä–æ–≤–∞—Ç—å—Å—è –≤–ª–∏—è–Ω–∏–µ —ç–ª–µ–∫—Ç—Ä–æ—Å–µ—Ç–∏ (50 –ì—Ü) –Ω–∞ —Ä–µ–∑—É–ª—å—Ç–∞—Ç –∏–∑–º–µ—Ä–µ–Ω–∏—è. –ò—Ç–∞–∫, –ø–æ–¥–≤–µ–¥—ë–º –∏—Ç–æ–≥–∏. ¬Ý –î–æ—Å—Ç–æ–∏–Ω—Å—Ç–≤–∞: 1) –ø—Ä–æ—Å—Ç–æ—Ç–∞ –∞–ø–ø–∞—Ä–∞—Ç–Ω–æ–π –∏ –ø—Ä–æ–≥—Ä–∞–º–º–Ω–æ–π —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏; 2) –≤—ã—Å–æ–∫–∞—è —Ä–∞–∑—Ä–µ—à–∞—é—â–∞—è —Å–ø–æ—Å–æ–±–Ω–æ—Å—Ç—å (–∑–∞–≤–∏—Å–∏—Ç –æ—Ç –≤—Ä–µ–º–µ–Ω–∏ –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞–Ω–∏—è); 3) –¥–µ—à–µ–≤–∏–∑–Ω–∞; 4) –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç—å –ø—Ä–æ–≥—Ä–∞–º–º–Ω–æ —É—Å—Ç–∞–Ω–æ–≤–∏—Ç—å –∫–æ–¥ –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ–≥–æ —á–∏—Å–ª–∞ (–≤ —Ç.—á. –Ω–µ —Ä–∞–≤–Ω–æ–≥–æ 2^N-1); 5) —Ç–æ–ª–µ—Ä–∞–Ω—Ç–Ω–æ—Å—Ç—å –∫ –æ—Ç—Ä–∏—Ü–∞—Ç–µ–ª—å–Ω–æ–º—É –≤—Ö–æ–¥–Ω–æ–º—É –Ω–∞–ø—Ä—è–∂–µ–Ω–∏—é. ¬Ý –ù–µ–¥–æ—Å—Ç–∞—Ç–∫–∏: 1) –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ—Å—Ç—å –¥–≤—É–ø–æ–ª—è—Ä–Ω–æ–≥–æ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏—è –ø–∏—Ç–∞–Ω–∏—è; 2) –º–µ–¥–ª–∏—Ç–µ–ª—å–Ω–æ—Å—Ç—å (–≤—Ä–µ–º—è –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞–Ω–∏—è –ø—Ä–æ–ø–æ—Ä—Ü–∏–æ–Ω–∞–ª—å–Ω–æ —Ä–∞–∑—Ä–µ—à–∞—é—â–µ–π —Å–ø–æ—Å–æ–±–Ω–æ—Å—Ç–∏). ¬Ý –ü–µ—Ä—Å–ø–µ–∫—Ç–∏–≤—ã –∏ –ø—É—Ç–∏ –¥–∞–ª—å–Ω–µ–π—à–µ–≥–æ —Ä–∞–∑–≤–∏—Ç–∏—è. –ë—ã–ª–æ –±—ã –∏–Ω—Ç–µ—Ä–µ—Å–Ω–æ –ø–æ–∏–≥—Ä–∞—Ç—å—Å—è —Å –æ–ø–æ—Ä–Ω—ã–º –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ–º: —Å–¥–µ–ª–∞—Ç—å –µ–≥–æ –±–æ–ª–µ–µ —Å—Ç–∞–±–∏–ª—å–Ω—ã–º –∏/–∏–ª–∏ –¥–≤—É–ø–æ–ª—è—Ä–Ω—ã–º (—Ç–æ–≥–¥–∞ –º–æ–∂–Ω–æ –±—ã–ª–æ –±—ã –æ—Ü–∏—Ñ—Ä–æ–≤—ã–≤–∞—Ç—å –∏ –æ—Ç—Ä–∏—Ü–∞—Ç–µ–ª—å–Ω—ã–µ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏—è). –ö–æ–Ω–µ—á–Ω–æ –∂–µ, —Ä–∞—Å–∫–æ—á–µ–≥–∞—Ä–∏—Ç—å –ú–ö –¥–æ –æ–±–µ—â–∞–Ω–Ω—ã—Ö 20 –ú–ì—Ü (—Å –¥—Ä—É–≥–∏–º –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–æ–º –º–æ–∂–Ω–æ –∏ –±–æ–ª—å—à–µ) –∏ –ø–æ—Å–º–æ—Ç—Ä–µ—Ç—å, –∫–∞–∫ –≤–µ–¥—ë—Ç —Å–µ–±—è –ê–¶–ü. –ü–ª—é—Å –∫–æ –≤—Å–µ–º—É, –ø—Ä–∏ –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ—Å—Ç–∏ –æ–¥–Ω–æ–≤—Ä–µ–º–µ–Ω–Ω–æ–π –æ—Ü–∏—Ñ—Ä–æ–≤–∫–∏ 2-—Ö, 3-—Ö –∏–ª–∏ 4-—Ö —Å–∏–≥–Ω–∞–ª–æ–≤, —ç—Ç–æ –º–æ–∂–Ω–æ –¥–µ–ª–∞—Ç—å –≤ –æ–¥–Ω–æ–º —Ü–∏–∫–ª–µ. –¢–∞–∫–∏–º –æ–±—Ä–∞–∑–æ–º, –≤—Ä–µ–º—è –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞–Ω–∏—è —É–≤–µ–ª–∏—á–∏—Ç—Å—è –Ω–∞ 60, 120 –∏ 170 –ø—Ä–æ—Ü–µ–Ω—Ç–æ–≤ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–µ–Ω–Ω–æ –≤–º–µ—Å—Ç–æ 100, 200 –∏ 300 –ø—Ä–æ—Ü–µ–Ω—Ç–æ–≤, –µ—Å–ª–∏ –æ—Ü–∏—Ñ—Ä–æ–≤—ã–≤–∞—Ç—å –∫–∞–∂–¥—ã–π —Å–∏–≥–Ω–∞–ª –ø–æ –æ—Ç–¥–µ–ª—å–Ω–æ—Å—Ç–∏. –ò–Ω—Ç–µ—Ä–µ—Å–Ω–æ –±—ã–ª–æ –±—ã —Å–¥–µ–ª–∞—Ç—å –Ω–æ—Ä–º–∞–ª—å–Ω—ã–π –¥–µ—Ü–∏–º–∏—Ä—É—é—â–∏–π —Ñ–∏–ª—å—Ç—Ä –Ω–∞ –ü–õ–ò–° –∏–ª–∏ DSP. –¢–æ–≥–¥–∞ —É–∂–µ –º–æ–∂–Ω–æ –±—ã–ª–æ –±—ã –≥–æ–≤–æ—Ä–∏—Ç—å –∏ –ø—Ä–æ –æ—Ü–∏—Ñ—Ä–æ–≤–∫—É –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–≥–æ —Å–∏–≥–Ω–∞–ª–∞. ¬Ý ¬Ý –°—Å—ã–ª–∫–∏/–ª–∏—Ç–µ—Ä–∞—Ç—É—Ä–∞: 1. –í–°–Å –ø–æ –ø—Ä–æ—à–∏–≤–∫–µ –∏ –ø—Ä–æ–≥—Ä–∞–º–º–∏—Ä–æ–≤–∞–Ω–∏—é AT90S2313/ATTiny2313 2. –£—Ç–∫–∏–Ω –ú.–ù. –î–∏–ø–ª–æ–º–Ω–∞—è —Ä–∞–±–æ—Ç–∞ –º–∞–≥–∏—Å—Ç—Ä–∞ "–Ý–∞–∑—Ä–∞–±–æ—Ç–∫–∞ –∏ –∏—Å—Å–ª–µ–¥–æ–≤–∞–Ω–∏–µ –¥–µ—Ü–∏–º–∏—Ä—É—é—â–µ–≥–æ —Ñ–∏–ª—å—Ç—Ä–∞ —Å –º–∞–ª–æ–π –ø–æ—Ç—Ä–µ–±–ª—è–µ–º–æ–π –º–æ—â–Ω–æ—Å—Ç—å—é –¥–ª—è –∞–Ω–∞–ª–æ–≥–æ-—Ü–∏—Ñ—Ä–æ–≤–æ–≥–æ –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—è", –°–ü–±–ì–ü–£, 2009 –≥., 89 —Å. 3. –°–∏–≥–º–∞-–¥–µ–ª—å—Ç–∞ –ê–¶–ü 4. –ü—Ä–∏–º–µ–Ω–µ–Ω–∏–µ –æ–ø–µ—Ä–∞—Ü–∏–æ–Ω–Ω—ã—Ö —É—Å–∏–ª–∏—Ç–µ–ª–µ–π 5. 1N4148; 1N4448 High-speed diodes 6. 8-bit Microcontroller with 2K Bytes In-System Programmable Flash 7. General Purpose J-FET Quad Operational Amplifiers –í—Å–µ –≤–æ–ø—Ä–æ—Å—ã –≤ –§–æ—Ä—É–º.
–≠—Ç–∏ —Å—Ç–∞—Ç—å–∏ –≤–∞–º —Ç–æ–∂–µ –º–æ–≥—É—Ç –ø—Ä–∏–≥–æ–¥–∏—Ç—å—Å—è: |
|
|||||||||||||||
 |
 |


 |
||||

|
||||
































–Ý–∞–±–æ—Ç–æ—Å–ø–æ—Å–æ–±–Ω–æ—Å—Ç—å —Å–∞–π—Ç–∞ –ø—Ä–æ–≤–µ—Ä–µ–Ω–∞ –≤ –±—Ä–∞—É–∑–µ—Ä–∞—Ö:
IE8.0, Opera 9.0, Netscape Navigator 7.0, Mozilla Firefox 5.0
–ê–¥–∞–ø—Ç–∏—Ä–æ–≤–∞–Ω –¥–ª—è —Ä–∞–±–æ—Ç—ã –ø—Ä–∏ —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è—Ö —ç–∫—Ä–∞–Ω–∞ –æ—Ç 1280—Ö1024 –∏ –≤—ã—à–µ.
–ü—Ä–∏ –º–µ–Ω—å—à–∏—Ö —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è—Ö –≤–æ–∑–º–æ–∂–Ω–æ –ø–æ—è–≤–ª–µ–Ω–∏–µ –≥–æ—Ä–∏–∑–æ–Ω—Ç–∞–ª—å–Ω–æ–π –ø—Ä–æ–∫—Ä—É—Ç–∫–∏.
–ü–æ –≤—Å–µ–º –≤–æ–ø—Ä–æ—Å–∞–º –æ–±—Ä–∞—â–∞–π—Ç–µ—Å—å –∫ –ö–æ—Ç—É: kot@radiokot.ru
©2005-2026